Stationäres Gleichgewicht
Werbung

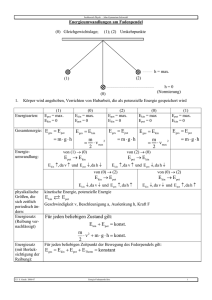
2.19 Stationäres Gleichgewicht und einfache Maschinen ∑ zip02/72/Vorl/mewae/MWed/2_19es2.tex 02.11.11 ∑ ⃗ ges = F ⃗ i = 0, M ⃗ ges = M ⃗i = 0 ⃗ = 0 muß gelten F Damit Körper ruht ⃗v = 0, ω Je nach Verhalten unter Auslenkung unterscheidet man eine stabile ,indifferente und labile Gleichgewichtgslage. entspricht Auftreten von Kraft.entgegengesetzt zur Auslenkung, keiner Kraft, Kraft gleichgerichtet zu einer Auslenkung δ⃗r = δr ⃗e r ⃗ = − ∂Wpot ⃗e r . Einfach über δW pot δ⃗r > 0, = 0 und < 0 zu definieren, denn es ist F ∂δr Z.B. Gleichgewichtslage eines Körpers auf Unterlage im Schwerefeld: ⃗δ⃗r = −−mge⃗z δr ⃗e r = mgδr ⃗e z⃗e r = mgδr cos α⃗e z , ⃗e r δW pot = −F ∂ W pot ⃗=− ⃗e r = −mg cos α⃗e z , ⃗e r ⃗e r F ∂δr d.h. für cos α > 0, d.h. also für − π2 < α < π2 , entsteht durch die Auslenkung eine Komponente der Schwerkraft, die der Auslenkung entgegengerichtet ist und den Körper in die Ausgangslage zurücktreibt: ”stabiles Gleichgewicht”. Für cos α = 0, also für α = π2 , tritt keine Kraftkomponente in Richtung der Auslenkung auf, der Körper bleibt in der neuen Lage: ”indifferentes Gleichgewicht”. Für cos α < 0, d.h. also für π2 < α < 32π , entsteht durch die Auslenkung eine Komponente der Schwerkraft, die der Auslenkung gleichgerichtet ist und den Körper weiter aus derAusgangslage treibt: ”labiles Gleichgewicht”. Skizze Beispiele zum Gleichgewicht: Stationäres Gleichgewicht an einfachen Maschinen, wie schiefe Ebene, Hebel, Flaschenzüge, Getriebe. Sinn solcher Anordnungen: erforderliche Kraft kann bei gegebener zu verrichtender Arbeit gemäß dem Satz von der Erhaltung der Energie auf Kosten eines größeren Weges verringert werden (Lebewesen oder mechanische Kraftquelle hat begrenzte Kraft, übt diese eben dann über einen längeren Weg aus) Schon besprochen: Schiefe Ebene: ∑ ⃗ ges = F ⃗ i = 0. Die Komponente der Schwerkraft entlang der Gleichgewichtsbedingung: F ⃗ g = −mg cos α⃗e z , ⃗e r ⃗e r = −mg sin α Steigung ⃗e r muss also durch eine gleich schiefen Ebene F ⃗ zo = −F ⃗ g kompensiert werden, damit sich das System im große, entgegengesetzte Zugkraft F ⃗ z1 > F ⃗ zo ausgeübt, so bewegt sich der Körper Gleichgewicht befindet. Wird also eine Zugkraft F ⃗ ⃗ h mit ⃗ a = F z1m−F zo über die Schiefe Ebene hinauf, wobei die zurückzulegende Strecke l = sin α Steigung ⃗ z1 − F ⃗ zo → 0 ist die geleistete Arbeit somit W = mgh, ansonsten ist sie um die beträgt. Für F Beschleunigungsarbeit, die sich als W kin wiederfindet, höher. Anwendungen für Hebel einarmig: ∑ M⃗ i =0: zweiarmig: Formal für beide Fälle gleich, unterscheiden sich durch r 1 ≶ 0 ⃗ i = F i⃗e z , ⃗r i = r ⃗e y , M i = ⃗r i × F ⃗ i = r i F i ⃗e y × ⃗e z = r i F i⃗e x in dieser Anordnung F i ⃗ 1 = mg⃗ = −mge⃗z F ⃗ i = −r 1 mg + r 2 F 2 = 0 M ∑ ⃗2 = F r1 r2 mge⃗z Flaschenzug: Differentialflaschenzug: Die jeweils erforderlichen Kräfte lassen sich - besonders bei komplizierten Maschinen - vorteilhaft mit dem Satz von der Erhaltung der Gesamtenergie nach dem Prinzip der virtuellen Verschiebung berechnen: dabei wird angenommen, daß das System unter den wirkenden Kräften eine kleine Verschiebung δ⃗r erfährt, wobei von aussen keine Arbeit geleistet wird. Dann ist δW ges = 0, d.h. δW pot + δW kin = 0. Im Gleichgewichtszustand: δW kin = 0, δW pot ges = δW pot i = 0 ⃗ z.B. ein- oder zweiarmiger Hebel mit Last bei r 1 , Gegenkraft bei ⃗r 2 (Koordinaten-Ursprung bei ⃗r i = 0 angenommen, ⃗r i = r i ⃗e y , also z.B. r 1 < 0, r 2 > 0, ⃗ i = F i⃗e z , also kann F i ≶ 0 sein, und δ⃗r i = δr i⃗e z mit δr i = r i δϕ, und δϕ ⃗ = δϕ ⃗e ϕ (hier analog F wird z.B. ⃗e ϕ = ⃗e x angenommen, δϕ kann dabei je nach Drehsinn wieder ≶ 0 sein), dann bekommt δr i = r i δϕ für den ein- und den zweiarmigen Hebel das richtige Vorzeichen) ⃗ i δ⃗r i ⃗ 1 = −m 1 ge⃗z δW pot i = −F F ⃗ δ⃗r 1 = δr 1⃗e z = r 1 δϕ⃗e z (also z.B. > 0 am zweiarmigen Hebel für δϕ im Gegen-Uhrzeigersinn) δW pot 1 = m 1 gδr 1 = m 1 gr 1 δϕ ⃗ 2 = F 2⃗e z F δ⃗r 2 = δr 2⃗e z = r 2 δϕ⃗e z δW pot 2 = −F 2 δr 2 = −F 2 r 2 δϕ δW pot i = m 1 gr 1 δϕ − F 2 r 2 δϕ = 0 F 2 = m 1 g rr 12 und damit schliesslich ∑ ∑ ⃗ 2 = m 1 g r1 ⃗e z F r2 ∑ M⃗ i wieder für ein-und zweiarmiger Hebel, wie ja schon zuvor aus der Bedingung = 0 abgeleitet wurde. Daß das Prinzip der virtuellen Verschiebung aber ein mächtiger Formalismus ist, sieht man schon besser, wenn man es auf Bewegungsvorgänge anwendet. Dann wird die bei einer kleinen Verschiebung um δ⃗r in ein System hineingesteckte Arbeit als Beschleunigungsarbeit für eine Veränderung der Bewegungsenergie des Systems verwendet . δW pot ges = −δW kin ges Es war ja: ΔW kin i = −ΔW pot i = ΔW i = ⃗ i δ⃗r i = m i r̈ i δ⃗r i δ 2i i = F [Zur Erinnerung: mit va, r = ∫ ⃗r 2 ⃗r 1 ⃗ i dr⃗i = Δ F m i v 2i 2 m v2 m i v 2i d 2 dr i = miai ⃗ = m i a i dr i = F i dr⃗i , das skalare Produkt sorgt dabei mit seinem Vorzeichen dafür, dass die Bewegung z.B. verlangsamt wird, wenn auf einen in Richtung ⃗r bewegten Körper eine 2ar folgt m v2 d 2i i entgegengesetzt gerichtete Kraft wirkt etc.] δ W pot i = δW pot i = = − δW kin i = − ∑ ∑ ∑ ∑ ∑ −F⃗ δ⃗r + m ⃗a δ⃗r = 0 (*) i i i i = d m i 2a i r i 2 dr ∑δ m i v 2i 2 =− ∑ m ⃗a δ⃗r i i i i Als simples Beispiel dazu wieder den 2-armigen Hebel mit 2 Massen m 1 und m 2 im Schwerefeld, der sich nicht im Gleichgewicht befindet, also rotieren wird: Skizze! ⃗ = δϕ ⃗e x , ⃗a i = a i,⃗e z , a i = r i ϕ̈ etc., wie oben: δ⃗r i = δr i⃗e z mit δr i = r i δϕ, und δϕ ⃗ ⃗ − F i δr i = δW pot i = m i gr i δϕ ⃗ ⃗ m i a i δr i = m i r i ϕ̈ δr i⃗e z⃗e z = m i r i ϕ̈ r i δϕ = m i r 2i ϕ̈ δϕ 2̈ Damit folgt aus (*): m i gr i δϕ = − m i r i ϕ δϕ = −ϕ̈ δϕ m i r 2i und weiter: ∑ ∑ ∑ ϕ̈ = − ∑ ∑ ∑ gm i r i m i r 2i ∑ ∑ =− Mi J ∑ ∑ ∑ ∑ ∑ ⃗ i = M i⃗e x = ⃗r i × m i ⃗g Drehmoment der Masse m i bezüglich mit M ∑ r i = 0 im Schwerefeld und J= m i r 2i Trägheitsmoment der beiden Massen bezüglich r i = 0. (Überwiegt z.B. Masse m 1 mit r 1 < 0, dann ist m 1 r 1 < 0, daher ϕ̈ > 0, entsprechend der ⃗ des Systems im Uhrzeigersinn etc.). . tatsächlich auftretenden Winkelbeschleunigung α α⃗ = − ∑ J Mi ⃗e x wie ja schon bei der Besprechung des Drehmoments abgeleitet wurde. Weiteres Beispiel: Gewicht m hängt an über eine Rolle aufgewickeltem Seil. Welche Beschleunigung erfährt die Masse im Schwerefeld? Ofensichtlich widersetzen sich hier die träge Masse des Gewichts und das Trägheitsmoment J der Rolle der Bechleunigung! ⃗ i δ⃗r i = δW − F pot i = mgδz Bechleunigungsarbeit an der Masse: W a,m = mz̈ δz, an der Rolle: W a,r = Jϕ̈ δϕ = Jϕ̈ δrz = Jz̈ δr 2z an einzelner in r rotierender Masse veranschaulicht: W = Fδr = rF δrr = Mδϕ = Jϕ̈ δϕ ∑ ∑ Damit nach (*): mgδz = −mz̈ δz + Jz̈ δr 2z = −z̈ δz m + J r2 z̈ = − mg m+J/r 2 also so wie eine einzelne Masse m = J/r 2 , die in z-Richtung beschleunigt wird. Die Rolle wirkt