r = r
Werbung

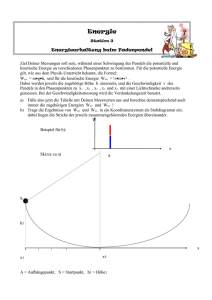
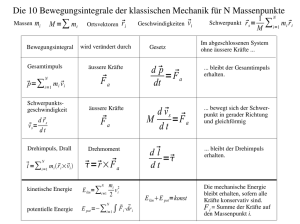
Allgemein am besten im System mit Massenmittelpunkt (centre of mass frame) oder Schwerpunktsystem (M=m1+m2) r = r1 - r2 M=m1+m2 Position € vom Schwerpunkt: M rM = m1r1 + m2 r2 MvM = m1v1 + m2 v2 = p1 + p2 ist€die Geschwindigkeit des Massenmittelpunkts im Laborsystem, € F Abgeschlossenes System, d. h. äuß = 0 dvM M =0 dt € ist konstant vor und nach dem Stoß. ⇒ € Elastische Stöße im Schwerpunktsystem: a) kinetische Energie elastisch: Wkin = vor Wkin’ nach dem Stoß 80 Wkin € m1v12 m2 v22 = + 2 2 im Laborsystem Jetzt: Bewegung zerlegt in Bewegung des Schwerpunktes und die Relativbewegung der Massen bezüglich des Schwerpunktes. r = r1 - r2 m2 r r1 = rM + M € m1r r2 = rM M€ € € € v = v1 - v2 Wkin = M rM = m1r1 + m2 r2 m 1 1 m m1( vM + 2 v)2 + m2 ( vM − 1 v)2 2 M 2 M 2 2 m m m m2 2 1 1 1 1 2 2 1 = (m1 + m2 )v2M + v + v 2 2 M2 2 M2 € € 1 2 1 m1m 2 2 = Mv M + v 2 2 m1 + m2 1 1 Wkin = Mv2M + µv2 2 2 € € µ= m1m 2 m1 + m2 ist reduzierte Masse kinetische Energie von Schwerpunkt und kinetische Energie im Schwerpunktsystem € 81 Abgeschlossenes System (keine äußere Kraft): vM = const. W*kin ist kinetische Energie im Schwerpunktsystem € b) Impuls im Schwerpunktsystem * r1 = r1 - rM € * r2 = r2 - rM € * * p1 = m1v1 = m1v1 - m1vM mm = m1vM + 1 2 v - m1vM M € € 82 = m1m2 v M € p1* = µv p2* = −µv € kin. Energie: p1* = −p2 * W *kin € p *2 = µv =€ 2µ 1 2 2 (p1* = −p2* = p * ) € nach dem Stoß: * * q = − q Impuls = 1 2 € für elastischen Stoß: W *kin ' € q*2 = = W *kin 2µ * * ⇒ p =q € ist der Impuls vor dem Stoß € q * ist der Impuls nach dem Stoß ist Streuwinkel im Schwerpunktsystem € 2 Unbekannte: , anstatt 4 83 Beispiel: In einem Kernreaktor wird ein Neutron (n) emittiert. Moderator enthält Deuterium (d). n hat die v=1x104 ms-1. Elastischer Stoß mit dem ruhendem d. mn=1.7x1027kg, md=3.4x1027kg. 1. Wie groß ist die Geschwindigkeit vom Schwerpunkt im Laborsystem? MvM = m1v1 + m2 v2 1.7x1027 x1x104 + 0 1 4 −1 vM = = x10 ms 3 (1.7 + 3.4)x1027 € 2. Wie groß ist die Geschwindigkeit von n vor dem Stoß im Schwerpunktsystem? € 1 2 v1* = v1 − vM = (1− )x104 = x104 ms −1 3 3 3. 3. Wie groß ist die Geschwindigkeit von d vor dem Stoß im Schwerpunktsystem? € 1 1 v2* = v2 − vM = (0 − )x104 = - x104 ms −1 3 3 4. Verhältnis von Wkin im Laborsystem mit W*kin im Schwerpunktsystem? € Wkin m1v12 m1(v1* )2 m2 (v2* )2 * = ,Wkin = + 2 2 2 Wkin 12 3 = = * Wkin ⎛ 2 ⎞2 ⎛ 1 ⎞2 2 ⎜ ⎟ + 2⎜ ⎟ ⎝ 3 ⎠ ⎝ 3 ⎠ € 84 € Zusammenfassung: p1 = m1v1 € € € v2=0 q1 = m1v1' p1 = q1 + q2 q2 = m1v'2 € M rM = m1r1 + m2 r2 r = r1 - r2 (M=m1+m2) € Impuls im Schwerpunktsystem (centre of mass frame = CM): € p1* = µv v = v1 - v2 p2* = - µv € € µ= € € Kinetische Energie im Schwerpunktsystem (CM): € 1 1 = Mv2M + µv2 2 2 WkinLab € Falls keine äußere Kraft wirkt: € vM = const. ' WkinLab = Wkin Lab € m1 + m2 p1* + p2* = 0 W *kinCM = 21 µv2 € m1m 2 ' W *kin = W *kin 85 W *kin ' q*2 p *2 = ,W *kin = 2µ 2µ p * = q* ist Streuwinkel im CM (Schwerpunktsystem) € € I.8 Drehimpuls, Drehmoment, Drehimpulssatz I.8.1 Drehimpuls eines Massenpunktes Def. Drehimpuls: L=r xp L heißt Drehimpuls. € L = r x p = r ⋅ p sin( r ,p) € L = 0, wenn p = 0 , r = 0 oder r || p € € Dimension: Einheit: kg m2 s-1 € € Länge x Impuls ist senkrecht zur Ebene mit , 86 Beispiele für Bewegungen mit Drehimpuls: Kreisbewegung L = r x p, r ⊥ p LZ = r⋅ p = r⋅ m⋅ v € € € Beachte: Angabe des Drehimpulses hängt von der Wahl des Koordinatensystems ab. Für Zentralkräfte: Der Drehimpuls bleibt erhalten, wenn die Kraft auf dem Massenpunkt eine Zentralkraft ist. d. h. F || r L=r xp € € dL dp d r =r x + xp dt dt dt = r x F + mv x v = 0 F || r € € € So ⇒ L = const. 87 Beispiel: Planetenbahn FG || r ⇒ L = const. € Allgemeiner Fall: dL =r xF=T dt Drehimpulssatz heißt Drehmoment (Torque) € Dimension: Weg x Kraft Einheit: mN verschwindet bei Zentralkräften, wo F || r Versuch: Versuch: € I.8.2 Drehimpuls eines Systems von Massenpunkten Verallgemeinerung der Formel L=r xp 88 € N N L = ∑ Li = ∑ ri x pi = i=1 i=1 N i i i ∑r x mv i=1 vi = vM + ui Setze: ri = rM + ri ' € € €Damit: N L = ∑ ( rM + ri ' )xmi ( vM + ui ) i=1 € Beachte: = rM × pM + ∑ ri ' ×pi ' € Bahndrehimpuls des Massenmittelpunktes – abhängig von Bezugssystem Drehimpuls in Bezug auf Massenmittelpunkt, Spin ist eine innere Eigenschaft des Systems unabhängig vom Bezugssystem. 89 Beispiel: Erde um Sonne durch Eigenrotation der Erde Versuch: Drehstuhl + Kreisel I.9 Kinematik starrer Körper Def. starrer Körper: keine Relativbewegung der Massenpunkte gegeneinander I.9.1 Bewegung eines starren Körpers Zwei Bewegungsarten: 1. Massenmittelpunkt ändert Lage im Raum 2. Körper ändert seine Richtung 1. ist eine Translationsbewegung 2. ist eine Rotationsbewegung. 90 € Versuch: Änderung der Richtung bedeutet Rotation um eine Achse. Achse kann sich im Laufe der Zeit ändern. Versuch: Beachte: Buch, Würfel ω1 + ω 2 ≠ ω 2 + ω1 ω bezeichnet Drehachse €oben gezeigt: v = rω Richtung von d. h.€ : senkrecht zu ω und v = ωx r € Beachte: € T Umlaufzeit heißt Frequenz Die Größe Dimension: heißt Winkelbeschleunigung. 1 / Zeit2 Einheit: 91 s-2 I.9.2 Kinetische Energie eines starren Körpers, Trägheitsmoment N oben: 2 Wkin = ∑ 21 mi vi i=1 Hier: ri vi = riω € € € N Wrot = 1 2 2 ∑ Δmr ω 2 ii =: 21 Jω 2 i=1 N € 2 J = ∑ Δmiri Dimension: heißt Trägheitsmoment. i=1 Masse x Länge2 Einheit: kg m2 € Für kontinuierliche Massenverteilung: Trägheitsmoment: J= 2 ∫ r dm € Mit variabler Dichteverteilung: Beachte: hat Ähnlichkeit mit Wkin = 92 Beispiel: Zylinder Beachte: Angabe der Drehachse ist wichtig. Folie: Verschiebung der Drehachse (Satz von Steiner): JM ' = ? € falls Rotationsachse durch M (Massenmittelpunkt) Schwerpunkt In Kapitel I.6.5 wurde gezeigt, dass 93 1 2 2 = MvM + N 1 2 ∑ mu' i 2 i i=1 Schwerpunkt € Wkin,M kinetische Energie des Schwerpunktes relativ zum Wkin,U kinetische Energie der Massen relativ zum Schwerpunkt (durch Translation, Rotation, Vibration) Jetzt: Rotationsachse durch M’ mit = 21 (Mz2 + JM )ω 2 = 21 JM ' ω 2 JM ' = JM + Mz2 d. h. € Versuch: € Hohlzylinder und Vollzylinder auf schiefer Ebene Hohlzylinder Metall – Vollzylinder aus Holz 94 Anwendung des Energiesatzes: Abrollbedingung: Vollzylinder: ⇒ Hohlzylinder: ⇒ daher vM Vollzylinder > vM Hohlzylinder Vollzylinder ist schneller als der Hohlzylinder! Quantitative Messung an einer rollenden Kugel: Versuch: abrollende Kugel 95 Folie, Video I.9.3 Drehimpuls eines starren Körpers von oben: N = M rM × vM + ∑ mi ri ' ×ui i=1 Spin Drehimpuls (im Massenmittelpunkt) € Rotierender starrer Körper in Ruhe, Drehachse durch Massenmittelpunkt, d. h. vM = 0, betrachte nur den Spin Q Li = Δmiri '⊥ ui ui = ri '⊥ ω ri ' € € 2 Li = Δmiri '⊥ ω € 2 Li = Δmiri '⊥ ω € N N 2 L = ∑ Li = ∑ Δmiri '⊥ ω = JMω € i=1 € i=1 96 Rechnung nur richtig, wenn starrer Körper um Symmetrieachse rotiert. z. B.: , JM = 1 MR2 2 € Kugel: Allgemein: Man findet bei beliebig geformten, starren Körpern immer 3 Achsen, die durch den Massenmittelpunkt M gehen und senkrecht aufeinander stehen: 97