Blatt 2 - Institut für Nichtlineare Mechanik
Werbung

Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 2.1
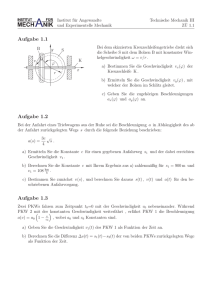
Aufgabe 2.1
v
√
v=k s
Für den Beschleunigungsvorgang eines Zuges gilt
das skizzierte Geschwindigkeits-Weg-Diagramm. Die
Konstante k ( k > 0 ) ist noch unbekannt.
Welche Geschwindigkeit v1 hat der Zug erreicht,
wenn er die Strecke s1 = 1200 m in t1 = 110 s
zurückgelegt hat?
v1
s1
s
Aufgabe 2.2
Ein Zug durchfährt einen Kreisbogen mit dem Radius r = 800 m . Er fährt aus der Ruhe heraus
mit konstanter Tangentialbeschleunigung an und erreicht nach t1 = 3 min Fahrzeit eine Geschwindigkeit v1 = 72 km
.
h
Bestimmen Sie für den Zeitpunkt t2 = 2 min
• die Geschwindigkeit des Zuges,
• die Tangentialbeschleunigung des Zuges,
• die Normalbeschleunigung des Zuges und
• die Gesamtbeschleunigung des Zuges.
Aufgabe 2.3
Der Punkt P bewegt sich auf einer Ellipse, die sich aus dem Schnitt des Zylinders x2 + y 2 = b2
und der Ebene z = 2x ergibt.
a) Stellen Sie einen allgemeinen Ortsvektor ~rP = ~rP (x) zum Punkt P auf und bestimmen Sie
den Geschwindigkeitsvektor ~vP = ~vP (x, vx ) , wobei vx = dx
= ẋ.
dt
b) Bestimmen Sie den Beschleunigungsvektor ~aP = ~aP (x, vx , ax ) mit ax = dvdtx = ẍ. Berechnen
Sie damit die Tangentialkomponente des Beschleunigungsvektors ~at = ~at (x, vx , ax ).
Aufgabe 2.4
Die Bewegung eines Massenpunktes in Polarkoordinaten erfolgt auf einer spiralförmigen Bahn, die
durch folgende Gleichungen gegeben ist:
r = cekt
ϕ = kt,
wobei c und k konstant sind.
Bestimmen Sie durch Rechnung in Polarkoordinaten die Beträge der Geschwindigkeit ~v und der
Beschleunigung ~a eines Punktes der Bewegungsbahn als Funktionen der Größe r .
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 2.2
Lösung zur Aufgabe 2.1
Gegeben ist:
s1 = 1200 m ,
t1 = 110 s
ds
dt
ergibt sich mit
√
v(s) = k s
Aus v =
(1)
durch bestimmte Integration für den Anfahrvorgang
Zt1
0
dt =
Zs1
1
ds =
v(s)
Zs1
0
1 1
√ ds
k s
0
√
s1
1 √ s 1
,
2· s 0 =2
t1 =
k
k
und damit für die Konstante k
√
s1
k=2
.
t1
(2)
Somit erhält man durch Einsetzen von (2) in (1)
√
s1 √
s
v(s) = 2
t1
(3)
und die gesuchte Geschwindigkeit
√
s1 √
2 s1
2 · 1200 m
m
v1 = v(s1 ) = 2
s1 =
=
= 21, 82 .
t1
t1
110 s
s
(4)
Lösung zur Aufgabe 2.2
Allgemein gilt für die ebene Bewegung in Polarkoordinaten:
~r(t) = r(t)~er (t)
~v (t) = ~r˙ (t) = ṙ(t)~er (t) + r(t)ϕ̇(t)~eϕ (t)
~a(t) = ~r¨(t) = r̈(t) − r(t)ϕ̇2 (t) ~er (t) + [r(t)ϕ̈(t) + 2ṙ(t)ϕ̇(t)] ~eϕ (t)
Für den Spezialfall der Kreisbewegung gilt ṙ(t) = r̈(t) = 0.
Damit folgt für den Geschwindigkeits- und Beschleunigungsvektor:
~v (t) = ~r˙ (t) = rϕ̇(t) ~eϕ (t)
| {z }
y
(1)
r
vt
~a(t) = ~r¨(t) = −rϕ̇2 (t) ~er (t) + rϕ̈(t) ~eϕ (t)
| {z }
| {z }
an
at
(2)
~eϕ (t)
~er (t)
ϕ(t)
x
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 2.3
Für den Anfahrvorgang des Zugs ist die Tangentialbeschleunigung at nach Voraussetzung konstant.
Aus (2) folgt
at = rϕ̈(t) = const.
ϕ̇(t) =
Z
⇒
ϕ̈(t) = ϕ̈ = const.
(3)
ϕ̈ dt + C = ϕ̈ t
(4)
Da der Zug aus der Ruhe heraus anfährt, verschwindet die Integrationskonstante C.
Mit vt (t) = rϕ̇(t) aus (1) und den gegebenen Werten v1 =
für die konstante Winkelbeschleunigung aus Gleichung (4)
ϕ̈ =
72 m
3,6 s
= 20 ms , t1 = 3 · 60 s erhält man
1 1
v1
ϕ̇(t1 )
=
=
t1
t1 r
7200 s2
(5)
und damit für die Winkelgeschwindigkeit
v1
ϕ̇(t) =
t.
t1 r
(6)
Die gesuchten Größen zum Zeitpunkt t2 = 2 · 60 s können nun berechnet werden:
ϕ̇(t2 ) =
1 1
v1
t2 =
,
t1 r
60 s
vt (t2 ) = v2 = rϕ̇(t2 ) = 13, 33
m
km
= 48
s
h
(7)
m
m
, an (t2 ) = an2 = −rϕ̇2 (t2 ) = −0, 22 2
2
s
s
Die Gesamtbeschleunigung ergibt sich zu:
q
m
|~a(t2 )| = a2 = a2t + a2n2 = 0, 25 2 .
s
at (t2 ) = at = rϕ̈ = 0, 11
(8)
(9)
Lösung zur Aufgabe 2.3
z
a) Der Ortsvektor zum Punkt P ist
x
√
~rP = y mit y = ± b2 − x2 . (1)
2x
y
x
Der Geschwindigkeitsvektor ~vP ergibt sich
aus der zeitlichen Ableitung des Ortsvektors,
wobei zu beachten ist, dass x = x(t) und damit y = f (x(t)).
Daher folgt mit
dy
dy dx
dy
=
=
vx
dt
dx dt
dx
und
dy
1
x
=± √
(−2x) = − :
dx
y
2 b2 − x2
(2)
Institut für Angewandte
und Experimentelle Mechanik
vx
1
d~rP x
= − y vx = vx − xy
~vP =
dt
2vx
2
Technische Mechanik III
(aer, ee) ZÜ 2.4
√
mit y = ± b2 − x2 .
(3)
b) Durch zeitliche Ableitung des Geschwindigkeitsvektors ~vP ergibt sich die Beschleunigung ~aP
zu
a
d~vP x
(4)
= ay .
~aP =
dt
2ax
Für die Komponente ay gilt
dvy
d
ay =
=
dt
dt
Mit
dx
dt
x
− vx
y
d
=−
dt
y
x
x
v x − ax = −
y
y
− x dy
x
dt
v x − ax .
2
y
y
(5)
dy
dt
aus (2) und x2 + y 2 = b2 folgt
1 x2
x
b2
x
ay = −
+ 3 vx2 − ax = − 3 vx2 − ax .
y y
y
y
y
= vx ,
dx
dt
Somit erhält man schließlich für den Beschleunigungsvektor
0
1
x
2 b2
−
− vx y 3 .
~aP = ax
y
2
0
(6)
(7)
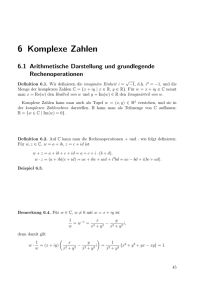
Für die Berechnung der Tangentialkomponente der Beschleunigung ~at nimmt man die folgende Skizze als Hilfsmittel.
~vP
~at
y
ϕ
~aP
P
~rP
~an
x
Es ist bekannt, dass der Geschwindigkeitsvektor ~vP und die Tangentialbeschleunigung ~at
stets tangential zur Bahnkurve liegt. Die Normalkomponente der Beschleunigung ~an steht
dazu senkrecht und zeigt auf den gegenwärtigen Krümmungsmittelpunkt der Bahn. Der eben
berechnete Beschleunigungsvektor ~aP setzt sich aus den Komponenten ~at und ~an zusammen.
Die Tangentialbeschleunigung ~at lässt sich aus der Projektion des Beschleunigungsvektors ~aP
auf den Geschwindigkeitsvektor ~vP berechnen. Diese lässt sich folgendermaßen herleiten: Die
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 2.5
Vektorlänge |~at | kann aus der Winkelbeziehung cos ϕ = |~at |/|~aP | und der Definiton des
Skalarprodukts, ~aP · ~vP = |~aP | |~vP | cos ϕ, bestimmt werden:
|~at | = cos ϕ |~aP | =
~aP · ~vP
~aP · ~vP
|~aP | =
.
|~vP | |~aP |
|~vP |
(8)
Multipliziert mit einem Einheitsvektor in Richtung des Geschwindigkeitsvektors
sich die Tangentialbeschleunigung ~at :
~at = |~at |
~vP
~aP · ~vP
=
~vP .
|~vP |
|~vP |2
~vP
,
|~vP |
ergibt
(9)
Aus (3) folgt:
2
2
v = |~vP | =
vx2
x2
+ 2 vx2 + 4vx2 =
y
x2
5+ 2
y
vx2 .
(10)
Mit (3) und (7) folgt:
x2
b2 x
~aP · ~vP = vx ax + 2 vx ax + 4vx ax + 4 vx3 =
y
y
x2
5+ 2
y
v x ax +
b2 x 3
v .
y4 x
(11)
Damit ergibt sich mit (10) und (11) in (9):
vx
2
2
ax
~aP · ~vP
b xvx
b xvx
ax
− xy vx
~at =
~vP = + +
~
v
=
P
2
2
2 )y 2
x2
v
vx
v
(5y
+
x
4
x
5 + y2 y
2vx
1
√
b2 xvx2
− xy , mit y = ± b2 − x2 .
=
ax +
(12)
(5y 2 + x2 )y 2
2
Hinweis: Falls nach der Berechnung der Normalkomponente der Beschleunigung ~an gefragt
ist, so lässt sich diese aus der folgenden Beziehung durch Einsetzen von (7) und (12) berechnen:
0
1
2
2
√
−b xvx
x
2
b
− y − vx 23 , mit y = ± b2 − x2 .
~an = ~aP − ~at =
(13)
y
2
2
2
(5y + x )y
2
0
Lösung zur Aufgabe 2.4
Ist ein Punkt in Polarkoordinaten durch folgenden Ortsvektor gegeben
~rpolar = r~er ,
(1)
dann gilt für die Geschwindigkeit ~v und die Beschleunigung ~a in Polarkoordinaten
~vpolar = ṙ ~er + rϕ̇ ~eϕ ,
~apolar = (r̈ − rϕ̇2 )~er + (rϕ̈ + 2ṙϕ̇)~eϕ .
(2)
(3)
Institut für Angewandte
und Experimentelle Mechanik
Mit r = cekt ,
ṙ = ckekt ,
r̈ = ck 2 ekt ,
ϕ = kt ,
Technische Mechanik III
(aer, ee) ZÜ 2.6
ϕ̇ = k ,
ϕ̈ = 0
folgt:
√
√
~vpolar = (ckekt )~er + (ckekt )~eϕ ⇒ v = |~v | = 2ckekt = 2kr ,
~apolar = 0 e~r + (2ck 2 ekt )~eϕ
⇒ a = |~a| = 2ck 2 ekt = 2k 2 r .
Hinweis:
Dasselbe Ergebnis erhält man auch durch Rechnung in kartesischen Koordinaten. Allgemein gilt
zwischen den Polarkoordinaten und den kartesischen Koordinaten eines Punktes folgender Zusammenhang:
~rkart
r cos ϕ
= rx ~ex + ry ~ey = r cos ϕ ~ex + r sin ϕ ~ey =
r sin ϕ kart
(4)
Damit erhält man:
d~rkart
ṙ cos ϕ − rϕ̇ sin ϕ
~vkart =
=
ṙ sin ϕ + rϕ̇ cos ϕ kart
dt
d~vkart
r̈ cos ϕ − ṙϕ̇ sin ϕ − (ṙϕ̇ + rϕ̈) sin ϕ − rϕ̇2 cos ϕ
=
~akart =
r̈ sin ϕ + ṙϕ̇ cos ϕ + (ṙϕ̇ + rϕ̈) cos ϕ − rϕ̇2 sin ϕ kart
t
r̈ cos ϕ − 2ṙϕ̇ sin ϕ − rϕ̈ sin ϕ − rϕ̇2 cos ϕ
=
r̈ sin ϕ + 2ṙϕ̇ cos ϕ + rϕ̈ cos ϕ − rϕ̇2 sin ϕ kart
(5)
(6)
Daraus folgt für den Betrag der Geschwindigkeit:
q
v =
ṙ2 cos2 ϕ + r2 ϕ̇2 sin2 ϕ − 2rṙϕ̇ sin ϕ cos ϕ + ṙ2 sin2 ϕ + r2 ϕ̇2 cos2 ϕ + 2rṙϕ̇ sin ϕ cos ϕ
p
v =
ṙ2 + r2 ϕ̇2
Mit den gegebenen Größen für r , ϕ und deren Ableitungen erhält man:
p
√
√
v = c2 k 2 e2kt + c2 e2kt k 2 = ckekt · 2 = 2kr
Für den Betrag der Beschleunigung folgt:
p
r̈2 · 1 + 4ṙ2 ϕ̇2 · 1 + r2 ϕ̈2 · 1 + r2 ϕ̇4 · 1 − 2r̈rϕ̇2 · 1 + 4rṙϕ̇ϕ̈ · 1
p
a =
r̈2 + 4ṙ2 ϕ̇2 + r2 ϕ̈2 + r2 ϕ̇4 − 2r̈rϕ̇2 + 4rṙϕ̇ϕ̈
a =
Mit den gegebenen Größen für r , ϕ und deren Ableitungen erhält man:
p
e2kt (c2 k 4 + 4c2 k 2 k 2 + 0 + c2 k 4 − 2cck 2 k 2 + 0)
√
a =
4c2 k 4 e2kt = 2ck 2 ekt = 2k 2 r
a =
(7)