labor/Druckvorlagen/Versuch 2
Werbung

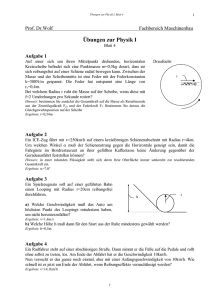
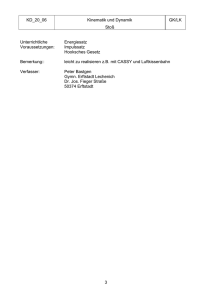
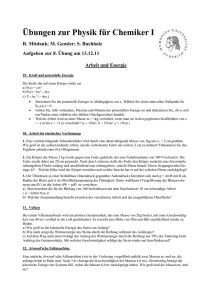
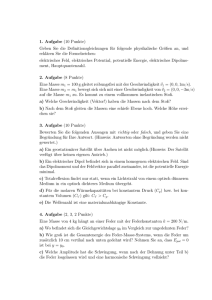
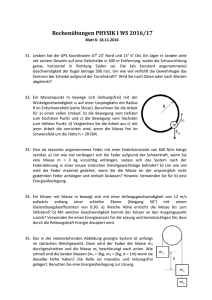
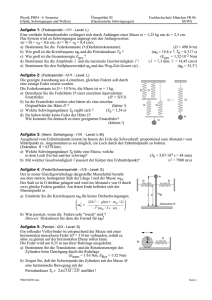
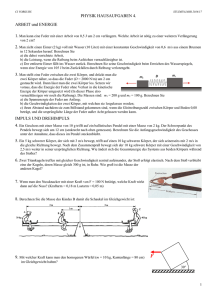
PHY Endtestat Physikzentrum Kennlinien von Federn; Bestimmung der Federkonstanten Mo Di Mi Do Fr Vortestat: Datum: Versuch: 2 Name: Gruppenmitglieder: ………………………………………………………………. ………………………………………………………………. Abgabe: Fachrichtung Sem. 1. Einleitung Ziel dieses Versuches ist es, die Belastungs- und Entlastungskennlinien von vollelastischen bzw. teilelastischen Federn zu bestimmen. Daraus werden die Federkonstante und die Vorspannung (vollelastische Federn) bzw. die Verformungsarbeit (teilelastische Feder) ermittelt. Wirken auf einen Körper mechanische Kräfte, so kommt es zu Spannungen, der Körper wird gedehnt bzw. es kommt zu Formänderungen. Betrachten wir einen Körper mit einer Anfangslänge l0 und einer Querschnittsfläche A0 und wirkt auf diesen Körper senkrecht zur Querschnittsfläche die Zugkraft F, so kann man die mechanische Spannung als das Verhältnis zwischen Kraft und Querschnittsfläche angeben: Durch den Zug kommt es zu einer Längenänderung l des Körpers, und somit zur Dehnung (relativen Längenänderung) Bei kleinen Dehnungen kann man bei vielen Werkstoffen ein elastisches Verhalten beobachten. Als elastisch wird ein Werkstoff bezeichnet, wenn die Längenänderung nach Entlastung reversibel ist, d. h. wenn der Werkstoff nach der Entlastung wieder in die ursprüngliche Länge zurückgeht. Trägt man in einem Diagramm die Spannung über der Dehnung auf, so wird die Spannungs – Dehnungs – Kurve sowohl bei Belastung als auch bei Entlastung durchlaufen (siehe Abbildung 1). Im linear elastischen Bereich besteht ein fester Zusammenhang zwischen Spannung und Dehnung: Dies wird als Hooksches Gesetz bezeichnet. Die Spannungund die Dehnung sind über den Elastizitätsmodul E verknüpft. Der Elastizitätsmodul ist eine Materialkonstante und im linear elastischen Bereich unabhängig von . Der Elastizitätsmodul kann jedoch von Umgebungsbedingungen wie etwa der Temperatur abhängen. Abbildung 1 PHY Versuch 2 Name: Physikzentrum Betrachten wir einen Werkstoff in Form eines Stabes mit der Länge l0 und der Querschnittsfläche A0, so kann man diesen Stab auch als eine harte Feder auffassen. Aus dem Zusammenhang: Folgt dann die Federkonstante D: Das Hooksche Gesetz gilt nicht für alle Werkstoffe und beliebige Kräfte, sondern nur im linear elastischen Bereich. Im Gegensatz zu elastischem Verhalten wird das Verhalten als plastisch bezeichnet, wenn nach der Entlastung der Werkstoff nicht mehr in seine Ausgangslänge zurückgeht und eine dauerhafte Längenänderung zurückbleibt, der Werkstoff also dauerhaft verformt wurde. Viele Werkstoffe zeigen ein Dehnungsverhalten, wie es in nebenstehendem Diagramm (Abbildung 2) dargestellt ist. Zunächst ist im Bereich ① ein linear elastisches Dehnungsverhalten erkennbar. Ab der Spannung p (Proportionalitätsgrenze) endet das linear elastische Verhalten und nicht lineares aber dennoch elastisches Verhalten setzt ein (Bereich ②). Der genaue Übergang zwischen elastischem und plastischem Verhalten (E wird dabei als Elastizitätsgrenze betrachtet: nicht eingezeichnet) ist häufig nicht eindeutig zu bestimmen. Aus diesem Grund wird eine Spannung Rp0,2 gewählt, bei welcher nach der Entlastung eine bleibende plastische Dehnung zurückbleibt (beispielsweise 0,2 %). Mit Abbildung 2 weiter zunehmender Dehnung wird im Bereich ③ der Kurvenverlauf immer flacher, bis (bei ausreichendem Dehnungsvermögen vorausgesetzt) die maximale Spannung Rm (Zugfestigkeit) erreicht wird. Bei weiterer Dehnung kommt es an der schwächsten Stelle des Werkstoffes zu einer zunehmenden Einschnürung der Probe (Bereich ④) bis zum Bruch. Bei einigen Werkstoffen kann man bei Überschreiten der elastischen Grenze einen Bereich beobachten, in dem sich der Werkstoff zunächst bei mehr oder weniger gleich bleibender Belastung plastisch verformt (ausgeprägte Streckgrenze, das Material beginnt zu „fließen“). Für eine weitere Dehnung des Werkstoffes über den Fließbereich hinaus ist eine zunehmende Spannung notwendig, d. h. der Werkstoff verfestigt sich (Verfestigungsbereich). Oberhalb von Rm beginnt sich die Probe einzuschnüren bis hin zum Bruch der Probe. -2- PHY Versuch 2 Name: Physikzentrum 2. Kennlinien von Federn In diesem Versuch soll nun anhand von zwei Stahlfedern bzw. einer Eisenfeder das Hooksche Gesetz bzw. die plastische Verformung untersucht werden. Wickelt man einen Draht zu einer Spirale, erhält man eine Schraubenfeder (meist nur Feder genannt). In unserem Versuch hat eine solche Feder (vollelastische Stahlfeder) einen großen Elastizitätsbereich von einigen Zentimetern. 2. 1. vollelastische Federn: Belastet man eine Feder mit einer Kraft F (beispielsweise durch Anhängen einer Masse m mit dem Gewicht FG m g (g=9,81m/s2: Erdbeschleunigung), beobachtet man, dass sich die Feder um eine bestimmte Länge ∆l verlängert (siehe Abbildung 4). Bei vollelastischen Federn (Stahlfedern) sind die Verlängerung ∆l und die Kraft F, mit der die Feder belastet wird, proportional. Es gilt: Abbildung 3 F D l (Hooksches Gesetz, siehe oben; D: Federkonstante). Trägt man in einem Schaubild auf der y-Achse die Kraft F und auf der x-Achse die Verlängerung l auf, erhält man eine Gerade, welche sowohl bei der Belastung als auch bei der Entlastung durchlaufen wird (siehe Abbildung 4, Kurve 1). Wird eine Feder gespannt, so muß Arbeit W verrichtet werden: rung um die Strecke ∆l in der Feder gespeicherte Energie ist: Energie wird beim Entspannen der Feder wieder freigesetzt. ∫ ⁄ . Die bei einer Verlänge) . Die aufgenommene Bei manchen Federn kann es auch vorkommen, dass sich die einzelnen Federwindungen im unbelasteten Zustand berühren. Um die Feder zu verlängern, ist anfangs eine Mindestkraft F notwendig, diese Federn haben also eine Vorspannungskraft F0. Zu beachten ist, dass bei Federn mit Vorspannung für kleine Belastungen F und l nicht linear sind. Die Federkonstante wird im linearen Teil der Kennlinie berechnet (siehe Abbildung 4, Kurve 2). Die Vorspannung F0 wird durch Extrapolation des linearen Anteils der Kennlinie bis zur y-Achse bestimmt. Abbildung 4 Abbildung 5 -3- PHY Versuch 2 Name: Physikzentrum 2. 2. Teilelastische Federn: Während bei vollelastischen Federn die Länge der Feder nach einem Durchgang von Belastung und anschließender Entlastung wieder in den Ausgangszustand zurückkehrt, die Feder also wieder ihre ursprüngliche Länge hat, ist das Verhalten von teilelastischen Federn dadurch gekennzeichnet, dass die Feder nach der Entlastung länger ist, als vor der Belastung, die Feder wurde also verformt, das heißt, ein Teil ∆W1 der in die Feder hineingesteckten Arbeit W wird als Verformungsarbeit verbraucht. Die Verlängerung ∆l1 nach der Entlastung wird als plastische Verformung bezeichnet. Nach einer weiteren Belastung und Entlastung ist die Verformung ∆l2 und damit die Verformungsarbeit ∆W2 geringer als beim ersten Zyklus. Die Verformungsarbeit kann im F-l-Diagramm über die von der Belastungsund Entlastungskurve eingeschlossene Fläche bestimmt werden (siehe Abbildung 5). 3. Federpendel 3. 1. Federpendel Als mechanische Schwingung bezeichnet man eine periodische Bewegung eines Massepunktes oder eines ausgedehnten Körpers um seine Gleichgewichtslage. Ist diese Bewegung sinusförmig, wird die Schwingung als harmonisch bezeichnet. Hängt man beispielsweise eine Masse m an eine Feder und lenkt diese um eine Strecke l aus, so führt die Masse eine periodische Auf- und Abbewegung um ihre Gleichgewichtslage aus. Die maximale Auslenkung l der Feder, von ihrer Gleichgewichtslage aus gemessen, wird als Amplitude bezeichnet. Die Zeit für eine volle Schwingung nennt man Periodendauer T. Eine weitere wichtige Größe ist die Frequenz f. Sie gibt die Zahl der Schwingungen in einer ⁄ . Wird die Periodendauer T in Sebestimmten Zeiteinheit an. Definiert ist die Frequenz als ⁄ kunden angegeben, ergibt sich die Einheit der Frequenz zu: [ ] (Hertz). Weiterhin wird die Kreisfrequenz definiert. Wird eine Feder mit einer Masse m um die Länge l ausgelenkt, so wirkt auf die Masse die Rückstellkraft . In der Feder ist Energie gespeichert: . Mit ergibt sich für ∫ ⁄ die in der Feder gespeicherte Energie: ) . Diese Energie wird nach dem Loslassen der Masse m in kinetische Energie umgewandelt, bis die Masse in der Gleichgewichtslage die maxi⁄ male kinetische Energie hat. Die in der Feder gespeicherte potentielle Energie ist dann Null. Die Masse bewegt sich über die Gleichgewichtslage hinaus und somit wird die Feder wieder gespannt (bzw. gestaucht). Die kinetische Energie der Masse nimmt dabei wieder ab und die in der Feder gespeicherte potentielle Energie nimmt wieder zu, bis im oberen Umkehrpunkt die kinetische Energie Null und die Energie in der Feder maximal ist. Es kommt also zu einer periodischen Änderung der Energieformen. Die Gesamtenergie (Summe aus der in der Feder gespeicherten Energie und der kinetischen Energie) des schwingenden Feder-Masse-Systems bleibt aber gleich. D. h. die kinetische Energie der Masse in der Gleichgewichtslage ist gleich der in der Feder gespeicherten Energie in einem der Umkehrpunkte. Durch Gleichsetzen erhält man: ⁄ ) ⁄ (1) Für die Geschwindigkeit v und die Kreisfrequenz gilt: (2) T ist die Zeit für eine Schwingung (Periodendauer). (2) eingesetzt in (1) ergibt: -4- PHY Versuch 2 Name: Physikzentrum 2 2 2 1 2 D l 1 2 m l T 2 Die Federkonstante errechnet sich zu: 4 2 m D T2 (3) Und für die Periodendauer T erhält man: T 2 m D (4) 4. Messmethoden 4. 1. Statische Belastung von Stahlfedern Bestimmen Sie von zwei Stahlfedern aus dem Kraft-Verlängerungsdiagramm bei einem Belastungsund Entlastungszyklus die Federkonstante D. Gehen Sie dabei folgendermaßen vor: 1. Wählen Sie einen geeigneten Punkt am unteren Ende der Feder als Markierung und stellen diesen paralaxenfrei auf den Skalenteil „Null“. Sie lesen paralaxenfrei ab, wenn sich der o. g. geeignete Punkt mit seinem Spiegelbild und dem entsprechenden Maßstabsstrich decken. 2. Erhöhen Sie in den vorgegebenen Schritten (siehe Tabelle) die Belastung und lesen Sie jedes Mal paralaxenfrei die Verlängerung ab. Zeichnen Sie die Meßpunkte gleichzeitig in ein Kraft-Verlängerungsdiagramm ein. 3. Nach Erreichen der maximalen Verlängerung entlasten Sie die Feder wieder kontinuierlich. Lesen Sie dabei die Verkürzungen ab und tragen Sie sie ein. 4. Tragen Sie nach Augenmaß die Ausgleichsgerade in das Diagramm ein. Nur die Punkte, die nah oder auf der Ausgleichsgeraden liegen, werden zur statistischen Auswertung verwendet. 4. 2. Dynamische Methode: Bestimmen Sie bei den Stahlfedern die Federkonstante D zusätzlich aus der Schwingungsdauer des von Feder und Masse m gebildeten Federpendels. In der Formel (3) muß wegen des Einflusses der Federmasse mF die einzusetzende Masse m korrigiert werden. Man setzt m = mges = mB + mK wobei ⁄ . Dabei ist mF die Masse der Feder. Für mB die Masse der Belastung ist. Für mK gilt: die Federkonstante folgt daraus: 4 mF 4 2 mB 2 D T2 -5- PHY Versuch 2 Name: Physikzentrum Gehen Sie folgendermaßen vor: 1. Die Federbelastung soll im mittleren linearen Teil der Kennlinie liegen. 2. Messen Sie die Zeit für 20 Schwingungen 5 mal und mitteln Sie die 5 Messungen. Die Amp litude soll möglichst klein sein (geringe Querschwingungen), wobei die Federwindungen sich während des Schwingens nicht berühren dürfen (vorgespannte Feder!). 4. 3. Statische Belastung der Eisenfeder: Für eine Eisenfeder sind zwei Belastungs- und Entlastungs-Zyklen nach Abb. 2 aufzunehmen. Vor dem ersten Zyklus nennen wir das Material „nicht vorgestreckt“, vor dem zweiten „vorgestreckt“. Gehen Sie folgendermaßen vor: 1. Drücken Sie die Feder der Länge nach mehrmals vollständig zusammen. 2. Stellen Sie einen geeigneten Punkt der Feder auf „Null“ ein (siehe 4.1.). 3. Erhöhen Sie in den vorgegebenen Schritten die Belastung und lesen Sie jedes Mal paralaxenfrei die Verlängerung ab. Zeichnen Sie gleichzeitig die Messpunkte ein. Hierbei muss folgendes beachtet werden: Teilelastisches Material zeigt unter Belastung ein sogenanntes „Kriechen“, d. h. die Verlängerung hängt auch von der Belastungszeit ab. Halten Sie daher die Belastungszeit möglichst kurz (beim Auflagenwechsel die Feder mit der Hand entlasten) und lesen Sie die Werte rasch ab. 4. Vermindern Sie von der maximal erreichten Verlängerung ab die Belastung in den vorgegebenen Stufen und nehmen Sie die jeweilige Verlängerung auf. 5. Nach der vollständigen Entlastung zeigt die Feder noch die Verlängerung ∆l1. Diese ist nun die Anfangslänge für den zweiten Zyklus bei der Belastung „Null“. Führen Sie den zweiten Zyklus wie den ersten durch. Hinweis: Sollte die Verlängerung der Feder die Skalenlänge überschreiten, so muss eine Messbereichserweiterung durchgeführt werden: z. B. Skala 10 cm nach unten oder Feder 10 cm nach oben verschieben. Diese Verschiebung muss dann bei den Messwerten berücksichtigt werden. -6- PHY Versuch 2 Name: Physikzentrum 5. Messungen 5. 1. Messungen an Stahlfeder Nr._______ (ohne Vorspannung) Auflage Auflage m/g F/N Verlängerung bei Belastung l/mm Verlängerung bei Entlastung l/mm (F0 aus lin. Regr.) * 0 0 60 0,59 110 1,08 160 1,57 210 2,06 260 2,55 310 3,04 360 3,53 420 4,12 470 4,61 520 5,10 570 5,59 0 Zeichnen Sie das Kraft-Verlängerungsdiagramm (DIN A4 quer). Legen Sie nach Augenmaß die Ausgleichsgerade hinein. Zeichnen Sie das Steigungsdreieck ein. Bestimmen Sie graphisch die Federkonstante (Steigung) und die Vorspannung (Achsenabschnitt) ⁄m F0=_______N Berechnen Sie mit einem Statistikprogramm die Steigung D und den Achsenabschnitt F0 der Ausgleichsgeraden. (Verwenden Sie nur die Punkte, die im linearen Bereich liegen!) Korrelationskoeffizient: r=__________ Achsenabschnitt: a=__________ F0=_______N Steigung: b=__________ D=_______N/m -7- PHY Versuch 2 Name: Physikzentrum Mit F0 aus der linearen Regression ermitteln Sie die Federkonstanten für jene Punkte, die im linearen Bereich liegen: Di=(Fi-F0)/li und tragen sie diese in die Tabelle ein. Berechnen Sie aus den Einzelergebnissen Di den Mittelwert der Federkonstanten und die Standardabweichung sD. ) ⁄m Dynamische Methode (Federpendel) Masse der Belastung: mB=__________g Masse der Feder: Zeit t/s für 20 Schwingungen (5 mal messen!) mF=__________g Mittelwert t/s Periodendauer T/s Federkonstante D=__________N/m Bei der Bestimmung der Federkonstanten aus der Schwingungsgleichung (siehe 4.2.) ist D von den m D mges T 2 fehlerbehafteten Größen mges und T abhängig: D ges 2 D mges T T Berechnen Sie ∆D (∆m/m = 1%, ∆t = 0,2 s, ∆T = 0,01 s). Fehlerrechnung: ∆D=__________N/m -8- PHY Versuch 2 Name: Physikzentrum 5. 2. Messungen an Stahlfeder Nr._______ (mit Vorspannung) Auflage Auflage m/g F/N Verlängerung bei Belastung l/mm Verlängerung bei Entlastung l/mm (F0 aus lin. Regr.) * 0 0 60 0,59 110 1,08 160 1,57 210 2,06 260 2,55 310 3,04 360 3,53 420 4,12 470 4,61 520 5,10 570 5,59 0 Zeichnen Sie das Kraft-Verlängerungsdiagramm (DIN A4 quer). Legen Sie nach Augenmaß die Ausgleichsgerade hinein. Zeichnen Sie das Steigungsdreieck ein. Bestimmen Sie graphisch die Federkonstante (Steigung) und die Vorspannung (Achsenabschnitt) ⁄m F0=_______N Berechnen Sie mit einem Statistikprogramm die Steigung D und den Achsenabschnitt F0 der Ausgleichsgeraden. (Verwenden Sie nur die Punkte, die im linearen Bereich liegen!) Korrelationskoeffizient: r=__________ Achsenabschnitt: a=__________ F0=_______N Steigung: b=__________ D=_______N/m -9- PHY Versuch 2 Name: Physikzentrum Mit F0 aus der linearen Regression ermitteln Sie die Federkonstanten für jene Punkte, die im linearen Bereich liegen: Di=(Fi-F0)/li und tragen sie diese in die Tabelle ein. Berechnen Sie aus den Einzelergebnissen Di den Mittelwert der Federkonstanten und die Standardabweichung sD. ) ⁄m Dynamische Methode (Federpendel) Masse der Belastung: mB=__________g Masse der Feder: Zeit t/s für 20 Schwingungen (5 mal messen!) mF=__________g Mittelwert t/s Periodendauer T/s Federkonstante D=__________N/m Bei der Bestimmung der Federkonstanten aus der Schwingungsgleichung (siehe 4.2.) ist D von den m D mges T 2 fehlerbehafteten Größen mges und T abhängig: D ges 2 D mges T T Berechnen Sie ∆D (∆m/m = 1%, ∆t = 0,2 s, ∆T = 0,01 s). Fehlerrechnung: ∆D=__________N/m -10- PHY Versuch 2 Name: Physikzentrum 5. 3. Messungen an einer Eisenfeder Auflage Auflage m/g F/N Verlängerung bei 1. Belastung l/mm 0 0 0 60 0,59 110 1,08 160 1,57 210 2,06 260 2,55 310 3,04 360 3,53 *420 4,12 470 4,61 520 5,10 570 5,59 Verlängerung bei 2. Entlastung l/mm Verlängerung bei 2. Belastung l/mm Verlängerung bei 2. Entlastung l/mm Zeichnen Sie das Kraft – Verlängerungs – Diagramm für beide Belastungszyklen Die Verformungsarbeit der Eisenfeder ∆W1 ist durch Planimetrieren zu ermitteln. Bestimmen Sie dazu die Arbeit, die einem cm2 entspricht und multiplizieren Sie diese dann mit der eingeschlossenen Fläche. 1 cm2 ≙ J A = __________ cm2 -11- ∆W1 = __________ J