Kontinuumsmechanik Wintersemster 2016/17
Werbung

Kontinuumsmechanik
Wintersemster 2016/17
Prof. Dr.-Ing. Stefan Diebels
Universität des Saarlandes
Lehrstuhl für Technische Mechanik
Version vom 3.12.2016
!!!Diese Version ist eine α-Version!!!
Inhaltsverzeichnis
1 Einleitung
1
2 Lineare Elastizitätstheorie
9
2.1
Der materielle Körper
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2
Geometrisch lineare Kinematik
. . . . . . . . . . . . . . . . . . . . . . . .
10
2.3
Massen-, Impuls- und Drallbilanz . . . . . . . . . . . . . . . . . . . . . . .
18
2.4
Das verallgemeinerte Hookesche Gesetz . . . . . . . . . . . . . . . . . . . .
28
3 Tensorrechnung
9
35
3.1
Tensoralgebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
3.2
Tensoranalysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
4 Große Deformationen
49
4.1
Bewegungsfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
4.2
Geschwindigkeit und Beschleunigung . . . . . . . . . . . . . . . . . . . . .
51
4.3
Materielle Zeitableitung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
4.4
Transport materieller Linien, Flächen, Volumen . . . . . . . . . . . . . . .
54
4.5
Deformations- und Verzerrungstensoren . . . . . . . . . . . . . . . . . . . .
58
4.6
Darstellung mittels Verschiebungsgradient . . . . . . . . . . . . . . . . . .
60
4.7
Geschwindigkeitsgradient . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
4.8
Bilanzgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
4.9
Massenbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
4.10 Impulsbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
68
4.11 Drallbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
5 Linearisierung
75
6 Rheologie
81
i
7 Materialmodelle
91
7.1
Lineare Elastizität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
91
7.2
Lineare Viskoelastizität . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
93
7.3
Plastizität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
94
7.4
Viskoplastizität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
94
7.5
Schädigung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
94
ii
α-Version vom 3.12.2016
1
1
Einleitung
Die Mechanik allgemein beschäftigt sich mit der Beschreibung der Bewegung von Körpern
unter der Wirkung von Kräften. In der Kontinuumsmechanik werden die Körper als kontinuierlich im Raum verteilt und als deformierbar angesehen. Die Gebiete der Punktmechanik
und der Starrkörpermechanik sind als Sonderfälle eingeschlossen. Die Agregatzustände fest,
flüssig, gasförmig der betrachteten Körper sind grundsätzlich beliebig.
Die Mechanik ist einer der ältesten Teile der klassischen Physik. Die folgende Tabelle gibt
eine exemplarische Aufstellung von Wissenschaftlern, die sich mit mechanischen Problemstellung befasst haben und ordnet sie geschichtlich ein. Die wesentlichen Aussagen, auf
denen mechanische Untersuchungen aufbauen, sind demnach schon lange bekannt. Trotzdem ist die Kontinuumsmechanik aus der heutigen Technik nicht wegzudenken, denn sie
stellt die Grundlage fr die Simulationsmethoden, ohne die eine schnelle und effektive Produktentwicklung nicht möglich ist.
Archimedes von Syrakus
Hebelgesetze, Auftrieb (Archimedisches Prinzip)
287–221 v. Chr.
1492
1517
Simon Stevin
Kräfteparallelogramm
Johannes Kepler
Plantenbewegung
(Keplersche
Gesetze)
Galileo Galilei
Bewegung auf der schiefen Ebene, beschleunigte Bewegung,
Trägheitsprinzip, Festigkeit von
Balken
Robert Hooke
Plantenbewegung, Schwerkraft,
Mechanische Federn (Hookesches
Gesetz)
Sir Isaac Newton
Entdeckung Amerikas durch
Christoph Kolumbus
Anschlag von Martin Luthers
Thesen an der Schloßkirche zu
Wittenberg
1548/49–1620
1571–1630
1564–1641
1635–1703)
1618–1648
1643–1726
Dreißigjähriger Krieg
2
Kontinuumsmechanik WS 16/17
Newtonsche Axiome (Beharrungsatz, Impulssatz, Wechselwirkungsprinzip), Infinitesimalrechnung (im Streit mit Gottfried
Wilhelm Leibniz)
1683
1685
1707–1783
Leonhard Euler
Hydrodynamik (Eulersche Gleichungen), Kreiseldynamik (Eulersche Kreiselgleichungen), Stabilittstheorie (Eulerscher Knickstab)
Charles Augustin de Cou- 1736–1806
lomb
Bodenmechanik, Reibung in Fluiden, Haftreibung (Coulombreibung)
1748
Federico Luigi Conte di 1809–1896
Menabrea
Angewandte Mechanik (Satz von
Menabrea)
Joseph-Louis Lagrange
1736–1813
Analytische Mechank (LagrangeGleichungen)
Carlo Alberto Castigliano
1847–1884
Baustatik (Satz von Castigliano)
1756–1791
Claude Louis Marie Henrie 1785-1836
Navier
Elastizitätstheorie (Lamé-NavierGleichungen)
1789
Augustin-Louis Cauchy
1789–1857
Elastizitätstheorie, Spannungstensor (Cauchy-Theorem)
Henrie Édouard Tresca
1814–1885
Festigkeitshypothesen
1848/49
1861
2. Belagerung Wiens durch die
Türken
Gründung der Dillinger Hütte
Gründung Villeroy & Boch
Wolfgang Amadeus Mozart
Beginn der französischen Revolution
Deutsche Revolution
Beginn
des
Amerikanischen
Bürgerkriegs
α-Version vom 3.12.2016
3
1886
Ludwig Prandtl
1875–1953
Strömungsmechanik,
Grenzschichttheorie
Richard Edler von Mises
1883–1953
Strömungsmechankik, Aerodynamik, Festigkeitshypotesen (von
Mises-Spannung)
1886
Ekkehart Kröner
1919–2000
Plastizitätstheorie,
Eigenspannungen
Clifford Truesdell
1919–2000
Rational Mechanics
Carl Benz Patent-Motorwagen
Nr. 1
Erfindung von Coca Cola
Die Beschreibung im Rahmen der Kontinuumsmechanik erfolgt makroskopisch, d. h. der
atomistische Aufbau der Materie wird nicht untersucht. Vielmehr geht man davon aus, dass
auf der zugrundeliegenden Skala die Materie als kontinuierlich im Raum verteilt angesehen
werden kann. Die Grundlage der Modellierung bilden dabei einige wenige Axiome, die a
priori als wahr angenommen und im Rahmen der Theorie nicht bewiesen werden können.
Sowohl die Axiome als auch die ergänzenden Aussagen über das Verhalten ganz spezieller Körper, die betrachtet werden, werden aus Experimenten abgeleitet. Die Kontinuumsmechanik wird daher auch als phänomenologisch bezeichnet, da sie die Ursachen der
Beobachtung, die üblicherweise auf einer kleineren als der betrachteten Skala liegen, nicht
untersucht. So ist z. B. die Ursache fr die Steifigkeit eines Festkörpers, die an einer makroskopischen Probe im Zugversuch gemessen werden kann, auf der atomaren Skala durch
die Kräfte verursacht, mit denen die atomaren Bindungen bei der Dehnung des Körpers
belastet werden.
Da die Strukturen, die in Ingenieurfragestellungen untersucht werden, im Vergleich zu
Atomen oder Molekülen sehr groß sind, ist eine Beschreibung auf der atomaren Skala nicht
zielführend, da selbst auf modernen Supercomputern die entsprechenden Rechnungen nicht
durchführbar oder zu langwierig sind. Eine Beschreibung auf einer geeignet großen Skala ist
daher für das ingenieurmäßige Verständnis der Deformation und eines möglichen Versagens
zwingent notwendig.
Ein Vorteil der Kontinuumsmechanik, der durch die Annahme der kontinuierlich verteilten Körper bedingt ist, ist in der Anwendung der Differentialgeometrie und der Differentialrechnung zu sehen. Dadurch, dass bei der Beschreibung alle Größen als hinreichend
stetig angesehen werden können, führt die mathematische Modellierung auf Systeme von
partiellen Differentialgleichungen im Ort und in der Zeit, die mit effizienten numerischen
4
Kontinuumsmechanik WS 16/17
Verfahren, wie etwa der Methode der Finiten Elemente, auch im nichtlinearen Fall gelöst
werden können.
Aufgrund der phänomenologischen Beschreibung ergeben sich drei Bereiche, die untersucht
werden müssen:
• Experimente
Experimente bilden die Grundlage der Beschreibung. Effekte, die in den Experimenten immer wieder beobachtet werden, bekommen den Charakter von Axiomen. Man
geht davon aus, dass diese Effekte immer auftreten und von grundsätzlicher Natur sind. Häufig spricht man von Naturgesetzen. Das wohl bekannteste Axiom ist
das 2. Newtonsche Axiom in der Form Kraft ist Masse mal Beschleunigung, das
als Definition der Kraft aufgefasst werden kann. Experimente, die sich mit speziellen Effekten, z.B. mit der Bestimmung von Steifigkeiten oder Fließgrenzen eines
Festkörpers befassen, werden genutzt, um die sogenannten Materialgleichungen oder
Konstitutivgleichungen des betrachteten Körpers zu ermitteln.
• Theorie
Die theoretische Beschreibung basiert einerseits auf den Axiomen, die nicht in Frage
gestellt werden, wenn sie einmal etabliert sind. Hierzu zählen die Massen-, Impulsund Drallbilanz sowie der erste und zweite Hauptsatz der Thermodynamik. Dieser
Block von Gleichungen wird allgemein als Bilanzgleichungen bezeichnet. Anderseits
beinhaltet die Theorie eine Beschreibung der Kinematik, in der Begriffe wie Verschiebung, Geschwindigkeit und Beschleunigung aber auch Deformation behandelt
werden. Dieser Teil der Theorie beruht im wesentlichen auf differentialgeometrischen
Betrachtungen.
Der dritte Teil der Theorie wird schließlich durch die Konstitutivgleichungen gebildet. Sie beschreiben das individuelle Verhalten der Körpers, der untersucht wird. An
dieser Stellt findet die phänomenologische Verknüpfung von Experiment und Theorie statt. Üblicherweise werden die Experimente so angelegt, dass sich homogene
Deformations- und Spannungszustände ergeben. Dann können aus den gemessenen
Weg- und Kraftwerten die entsprechenden lokalen Größen leicht ermittelt werden.
Aus diesen Daten wird dann ein Spannungs-Dehnungszusammenhang konstruiert,
der das Materialverhalten lokal beschreibt.
• Numerik
Die Kombination der Bilanzgleichungen mit der Kinematik und den Konstitutivgleichungen führt in der Regel auf einen nichtlinearen Satz von partiellen Differentialgleichungen, die nur in Ausnahmefällen analytische gelöst werden können. Durch die
gestiegene Rechenleistung von Computern hat sich daher in den vergangenen Jahren
die numerische Mechanik oder die computerorientierte Mechanik etabliert. Hier werden Methoden der nuermische Mathematik auf die nichtlinearen Problemstellungen
α-Version vom 3.12.2016
5
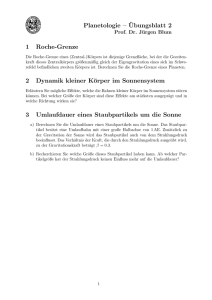
Abbildung 1: Reales Rohr und Simulation fig_einl_1
der Mechanik angewandt. Die wohl bekannteste Methode ist die Methode der Finiten Elemente, die mittlerweile auch in viele kommerzielle erhältlichen Programme
zur Berechnung mechanischer Fragestellungen Einzug gehalten hat.
In der vorliegenden Veranstaltung Kontinuumsmechanik werden die Grundlagen vermittelt, die zur Formulierung und Behandlung kontinuumsmechanischer Fragestellungen erforderlich sind. Behandelt werden vor allem Probleme der Festkörpermechanik. Die Methoden
sind aber problemlos auf die Fluidmechanik übertragbar.
Am folgenden Beispiel kann die Fragestellung, die die Kontinuumsmechanik verfolgt, deutlich gemacht werden. In der Abbildung 1 links ist ein reales Rohr zu sehen, das in einem
Biegeprozess umgeformt worden ist. Der Teil der Abbildung rechts zeigt das Ergebnis einer Simulation. Beide Geometriedarstellungen zeigen die selben Charakteristika. Auf die
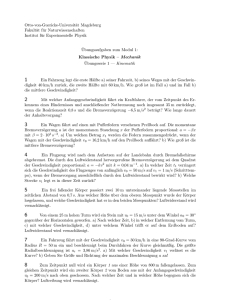
Geometrie des gebogenen Rohres ist in Abbildung 2 die sogenannte Vergleichsspannung
fr verschiedene Biegewinkel geplottet. Sie stellt ein ein Maß für die lokale Beanspruchung
darstellt. Bereiche hoher Vergleichsspannung (rot) sind stark belastet und deformieren sich
plastisch während Bereiche niedriger Vergleichsspannung (blau) nahezu unverformt bleiben.
An diesem Beispiel wird die Verknüpfung der drei Bereiche Experiment – Theorie – Numerik deutlich. Anschaulich läßt sich das Ziel, das die Kontinuumsmechanik verfolgt, als
Frage formulieren:
6
Kontinuumsmechanik WS 16/17
Abbildung 2: Vergleichsspannung bei unterschiedlichen Biegewinkeln fig_einl_2
Woher weiß der Computer, wie sich das Rohr biegt?
Die Veranstaltung ist folgendermaßen aufgebaut: Zunächst wird eine Einführung in die
lineare Elastostatik gegeben. Dabei werden die wesentlichen Gesichtspunkte deutlich. Für
kleine Deformationen wird der Dehnungstensor hergeleitet. Als grundlegende Bilanzenaussagen ergeben sich die lokalen Formulierungen der Massen-, Impuls- und Drallbilanz für
ein rein mechanisches Problem aus der Betrachtung eines Massenelements. Schließlich wird
als einfachster Fall einer Konstitutivbeziehung das verallgemeinerte Hookesche Gesetz motiviert. Die Kombination der Kinematik, der Impulsbilanz und des Hookeschen Gesetzes
führt dann auf die Lamé-Naviersche Verschiebungsdifferentialgleichung, eine partielle Differentialgleichung zweiter Ordnung in den Verschiebungen. Auch wenn für viele Sonderfälle
der Lamé-Navierschen Gleichung analytische Lösungen hergeleitet wurden, werden Lösungen beliebiger Randwertprobleme numerisch berechnet, da die analytischen Lösungen zu
komplex sind.
Bevor eine allgemeine Formulierung der kinematischen Beziehungen für große Verformungen entwickelt wird, wird eine Übersicht über die benötigten Elemente der Tensorrechnung
und der Differentialgeometrie gegeben. Auf dieser Basis können dann sowohl die kinematischen Beziehungen als auch die Bilanzaussagen ohne die Einschränkungen der linearen
Theorie gegeben werden. Durch die formale Formulierung der Energiebilanz gelingt an
dieser Stelle auch der Anschluß an die Thermodynamik, der an dieser Stelle jedoch nicht
vertieft wird.
Auf der Basis experimenteller Beobachtungen werden dann die vier wesentlichen Materialeigenschaften ratenabhängig, ratenunabhängig, mit oder ohne Gleichgewichtshysterese
motiviert. Mittels einfacher rheologischer Modelle können diese Eigenschaften in mathematische Strukturen umgesetzt werden, die die Grundlage einer räumlich dreidimensionalen
Formulierung bilden. Hier werden nochmals die lineare Elastizität, die lineare Viskoelastizität, die Plastizität und die Viskoplastizität bei kleinen Deformationen behandelt. Eine
α-Version vom 3.12.2016
7
Erweiterung um die Berücksichtigung von Schädigungsphänomenen schließt die Betrachtungen ab.
Die grundsätzliche Behandlung von nichtlinearen Modellen für große Deformationen im
Rahmen der rationalen Kontinuumsthermodynamik findet in der Veranstaltung Materialmodellierung statt und erweitert das hier aufgezeigte Vorgehen.
8
Kontinuumsmechanik WS 16/17
ec_linelast
α-Version vom 3.12.2016
2
9
Lineare Elastizitätstheorie
In dem Fall, dass Strukturen mit kleinen Kräften belastet werden, beobachtet man häufig
linear elastisches Verhalten. Das äußert sich darin, dass sich die Deformationen eines Bauteils proportional zu seiner Belastung verhalten, d.h. die Durchbiegung eines Trägers verdoppelt sich, wenn die Last verdoppelt wird. Bei Wegnahme der Last geht der Träger in
seinen ursprünglichen Zustand zurück. Diese vereinfachende Annahme gestattet die Auslegung vieler technischer Systeme auf ihre Gebrauchstauglichkeit hin. Allerdings stößt sie
auch häufig an ihre Grenzen. Nichtlineare Effekte, wie etwa das Auftreten plastischer Deformationen, die auch nach einer Wegnahme der Last bleiben, oder ratenabhängige Effekte, die vor allem bei Polymerwerkstoffen oder im Hochtemperaturbereich beobachtet
werden, können mit diesen einfachen Ansätzen nicht beschrieben werden. Dennoch zeigt
die Formulierung der linearen Elastizitätstheorie die wesentlichen Grundzüge auf, die sich
in jedem kontinuumsmechanischen Modell finden. Daher werden in diesem Kapitel die entsprechenden Überlegungen zusammengestellt. Sie dienen im Weiteren als Richtschnur für
das grundsätzliche Vorgehen.
2.1
Der materielle Körper
Ein Bauteil oder Strukturelement, das im Hinblick auf sein mechanisches Verhalten simuliert werden soll, wird vereinfachend als materieller Körper bezeichnet. Die Bezeichnung
impliziert, dass einerseits der betrachtete Körper untrennbar mit der Materie verbunden ist,
aus der er gebildet wird. Über den Aggregatzustand des Körpers (fest, flüssig, gasförmig)
sowie über seine konkreten Eigenschaften (elastisch, viskos, plastisch) ist an dieser Stelle
keine Aussage erforderlich. Andererseits zeigt der Begriff auch, das die konkrete Form des
Bauteils für die weiteren theoretischen Überlegungen unerheblich ist. Der materielle Körper
kann immer als ein beliebiger Ausschnitt eines konkreten Bauteils aufgefasst werden. Die
Grundlage dafür liefert das in der Mechanik immer wieder angewandte Schnittprinzip.
Da die Längenskala der kontinuumsmechanischen Betrachtung groß gegenüber den atomaren oder molekularen Dimensionen ist, geht man weiterhin davon aus, dass die Materie
und damit die Masse kontinuierlich im Volumen des Körpers verteilt sind. Die kleinste
beschreibbare Einheit des materiellen Körpers ist der materielle Punkt. Der materielle
Punkt ist der Träger der physikalischen Eigenschaften des materiellen Körpers und wird
im Rahmen der makroskopischen Beschreibung als mathematischer Punkt aufgefasst. In
einer mikroskopischen Betrachtung, d.h. zum Beispiel im Rahmen einer atomistischen Modellierung, ist der materielle Punkt ein Volumenelement, das mit einer endlichen Anzahl
von Atomen gefüllt ist. Die statistische Mechanik befasst sich mit der Fragestellung, wie
aus den Eigenschaften der einzelnen Atome durch geeignete Mittelungsoperationen die Eigenschaften des materiellen Punktes bestimmt werden. Bezüglich der Makroskala ergeben
sich die Eigenschaften als Grenzwert, wenn man das betrachtete Volumen gegen Null gehen
10
Kontinuumsmechanik WS 16/17
Abbildung 3: Bauteil, materieller Körper und atomare Struktur fig_linelast_1
läßt. Abbildung 3 veranschaulicht diesen Sachverhalt.
Als Konsequenz liegen in der kontinuumsmechanischen Beschreibung alle physikalischen
Größen als Dichtefelder vor. Sie sind als Funktionen des makroskopischen Ortsvektors und
der Zeit an jeder Stelle im Volumen des materiellen Körpers definiert. Als Beispiele sein
hier die Massen- und die Impulsdichte genannt. Die Massendichte ergibt sich aus der Masse
N
P
∆m =
mi der Atome, die in einem Volumen ∆V vorhanden sind. Bezüglich der makroi=1
skopischen Skala betrachtet man den Grenzwert ∆V gegen Null. Durch die Skalendifferenz
zwischen der makroskopischen und der mikroskopischen Skala ist sichergestellt, dass selbst
in einem sehr kleinen makroskopischen Volumen noch eine hinreichend große Anzahl N
von Atomen vorhanden ist. Damit ergibt sich die Definition der Massendichte als
PN
∆m
i=1 mi
= lim
.
(1)
ρ = lim
∆V →0 ∆V
∆V →0
∆V
eq_2_1
Die Impulsdichte an einem materiellen Punkt ergibt sich analog aus dem Gesamtimpuls
aller Atome im betrachteten mikroskopischen Volumenelement
N
P
ρv = lim
∆V →0
mi vi
i=1
∆V
.
(2)
Da die weiteren Betrachtungen die makroskopische Skala der kontinuumsmechanischen
Beschreibung nicht verlassen, sollen diese beiden Beispiele zur Motivation der Dichtefunktionen ausreichen.
2.2
Geometrisch lineare Kinematik
Ziel der kontinuumsmechanischen Betrachtungen ist es, einen Zusammenhang zwischen
den wirkenden Kräften und der Bewegung eines materiellen Körpers herzustellen. Der
eq_2_2
α-Version vom 3.12.2016
11
Abbildung 4: Materieller Körper in der Referenz- und der Momentankonfiguration, Definition der Verschiebung
fig_linel
Begriff der Bewegung ist dabei so weit gefasst, dass neben der Schwerpunktsbewegung des
materiellen Körpers auch die Deformation inbegriffen ist. Bewegung wird also genau wie
die oben eingeführten Dichtefunktionen als lokales Information angesehen. Ist schließlich
die Bewegung aller materiellen Punkte eines Körpers bekannt, so kann daraus sowohl die
Schwerpunktslage des Körpers als auch die Deformation bestimmt werden.
Als mathematisches Konstrukt ist der materielle Körper B (material body) eine unendliche
Menge von materiellen Punkten P. Die Grenze des materiellen Körpers ist sein Rand S
(material surface), der durch die Menge aller Randpunkte gebildet wird. Der materielle
Körper wird zur Beschreibung der Bewegung in einen Euklidschen Anschauungsraum eingebettet. Damit erhält jeder materielle Punkte genau einen Ortsvektor x, der seine Position
zur Zeit t beschreibt.
Abbildung 4 zeigt einen materiellen Körper B zum Zeitpunkt t0 und zum Zeitpunkt t > t0 .
Dadurch, dass an dem Körper Kräfte angreifen, hat er seine Position im Raum verändert
und sich dabei deformiert. Stellvertretend für alle materiellen Punkte hat sich der Punkt P
von seiner Anfangsposition X zur Zeit t0 an die aktuelle Position x zur Zeit t > t0 verschoben. Die Differenz zwischen den beiden Positionen kennzeichnet den Verschiebungsvektor
u. Es gilt
x = X + u(P, t) = X + u(X, t).
(3)
Da alle Punkte im Volumen des materiellen Körpers mit materiellen Punkten belegt sind,
ist die Verschiebung ebenfalls eine Feldgröße. Da ein materieller Punkt zu einem Zeitpunkt
t nur an einem Raumpunkt x sein kann und an einem Raumpunkt x immer nur genau ein
materieller Punkt vorliegen kann, ist die Verschiebung eine ein-eindeutige Funktion, d.h.
sie ist eindeutig und eindeutig invertierbar. Der materielle Punkt P, der zur Anfangszeit
t0 an der Position X ist, wird im weiteren ohne Beschränkung der Allgemeinheit mit
seiner Anfangsposition identifiziert. Die Verschiebung wird damit zu einer Funktion der
eq_2_3
12
Kontinuumsmechanik WS 16/17
Anfangsposition X und der Zeit t. Da die Anfangsposition X und der materielle Punkt P
in dieser Darstellung synonym gebracht werden, bezeichnet man die Darstellung 3 auch als
die materielle Darstellung des Verschiebungsfeldes. In dieser Darstellung beweget sich der
Beobachter des physikalischen Prozesses mit dem materiellen Punkt mit, d.h. er sieht zum
aktuellen Zeitpunkt t den materiellen Punkt an der Position x(P, t) = X + u(X, t).
Wie in der Punktmechanik können aus der Verschiebung die Geschwindigkeit und die
Beschleunigung des materiellen Punktes P bestimmt werden. Die Positionsänderung pro
Zeit liefert die Geschwindigkeit
du(X, t)
u(X, t + ∆t) − u(X, t)
=
= u̇(X, t).
∆t→0
∆t
dt
v(X, t) = lim
(4)
eq_2_4
Da sich der Beobachter mit dem materiellen Punkt bewegt, ist der Ortsvektor des materiellen Punktes X in der Anfangs- oder Referenzkonfiguration konstant. Die Zeitableitung
in 4 ist daher eine totale Ableitung, für die im weiteren ein Punkt als Sybmol verwendet
wird.
Die Änderung der Geschwindigkeit liefert die Beschleunigung
v(X, t + ∆t) − V(X, t)
= v̇(X, t) = ü(X, t).
∆t→0
∆t
a(X, t) = lim
(5)
eq_2_5
Sofern aus Gründen der Eindeutigkeit nicht erforderlich, wird auf die Angabe der Argumente X und t im weiteren verzichtet.
Aus dem Verschiebungszustand kann die Deformation eines materiellen Körpers nicht direkt abgelesen werden. Dazu ist es vielmehr erforderlich, ein materielles Volumenelement zu
betrachten, das sich mit dem Körper bewegt und deformiert. Ein entsprechendes Element
in ist in Abbildung 5 dargestellt. Der Einfachheit halber ist eine ebene Situation gezeigt. In
der Referenkonfiguration wird das Volumenelement als Rechteck der Kantenlängen ∆X1
und ∆X2 gewählt. Da das Element als klein angenommen wird, deformieren sich seine
Kanten linear. Das Rechteck wird in der aktuellen Konfiguration eine Raute (im dreidimensionalen Fall ein Spat), deren proijezierte Kanten die Längen ∆X1 und ∆X2 besitzen.
Die Ecken werden durch die materiellen Punkte P, Q und R gebildet. Der Punkt P verschiebt sich bei der Deformation um u(X). Da die Abstände ∆X1 und ∆X2 klein sind,
können die Verschiebungen der Punkte Q und R durch Taylor-Reihen approximiert werden. Dann gilt
∂u
∆X2 ,
u(Q) = u(X + ∆X2 e2 ) = u(X) +
∂X2
(6)
∂u
u(R) = u(X + ∆X2 e2 ) = u(X) +
∆X1 .
∂X1
Identifiziert man die Kantenlängen ∆X1 und ∆X2 mit den Ausgangslängen l1 und l2 ,
so erfahren die Projektionen des deformierten Elements auf die x1 - bzw. x2 -Achse die
Längenänderungen ∆l1 und ∆l2 . Damit gilt ∆x1 = l1 + ∆l1 und ∆x2 = l2 + ∆l2 . Die
eq_2_6
α-Version vom 3.12.2016
13
Abbildung 5: Materielles Volumenelement in der Referenz- und der Momentankonfiguration
_linelast_3
Kanten der Raute schließen mit den Koordinatenachsen die Winkel α und β ein, wie in
Abbildung 6 dargestellt.
Die Längen l1 + ∆l1 bzw. l2 + ∆l2 ergeben sich aus den horizontalen und den vertikalen
Abständen der Punkte P und R bzw. Q. In horizontaler Richtung ergibt sich nach Abbildung 6 aus der Anfangslänge l1 = ∆X1 und den Horizontalverschiebungen u1 (P) und
u1 (R)
l1 + ∆l1 + u1 (R) = l1 + u1 (P)
(7)
eq_2_6a
Die neue Länge des deformierten Elements in horizontaler Richtung betrgt damit
∂u1
l1 + ∆l1 = l1 + u1 (X1 , X2 ) +
l1 − u1 (X1 , X2 )
| {z }
∂X1
|
{z
}
= u1 (P)
(8)
eq_2_7
(9)
eq_2_8
≈ u1 (R)
Für die Längenänderung in den beiden Raumrichtungen folgt also
∆l1 =
∂u1
l1 ,
∂X1
∆l2 =
∂u2
l2 .
∂X2
Definiert man die Dehnungen als auf die Ausgangslänge bezogene Längenänderungen, so
erhält man schließlich
ε11 =
∂u1
,
∂X1
ε22 =
∂u2
,
∂X2
ε33 =
∂u3
.
∂X3
(10)
Dabei wird vorausgesetzt, dass in der dritten Raumrichtung, die in den Abbildungen 5 und
6 nicht berücksichtigt sind, die selben Beziehungen gelten, wie in der horizontalen und der
vertikalen Richtung.
Die Gestalt der Raute bzw. des Spats im dreidimensionalen Fall wird neben den Längenänderungen durch Winkeländerungen der ursprünglich rechten Winkel charakterisiert. Nach der
eq_2_9
14
Kontinuumsmechanik WS 16/17
Abbildung 6: Deformiertes Volumenelement fig_linelast_4
Abbildung 6 ergeben sich der Tangens des Winkels α aus dem rechtwinklingen Dreieck,
das durch die beiden Hypothenusen l1 + u1 (R) − u1 (P und u2 (R) − u2 (P) gebildet wird,
u2 (R) − u2 (P)
.
l1 + ∆l1
(11)
eq_2_10
Dieser Ausdruck ist nichtlinear. Für kleine Verschiebungen und kleine Verschiebungsableitungen sind die Winkel jedoch klein und die nichtlinearen Beziehungen können linearisiert
werden. Betrachtet man dazu wieder die entsprechenden Taylor-Reihen unter Vernachlässiung der quadratischen und höheren Terme, so erhält man für die Winkel α und β die
folgende Beziehung
∂u1
∂u2
, β =
.
(12)
α =
∂X1
∂X2
Die mittlere Winkeländerung, die der rechte Winkel des Volumenelements in der gezeigten
Ebene x1 –x2 -Ebene erfährt ist somit
∂u2
1 ∂u1
12 =
+
.
(13)
2 ∂X2
∂X1
eq_2_11
tan α =
Analoge Überlegungen in der x2 –x3 - und der x3 –x1 -Ebene führen auf
1 ∂u2
∂u3
1 ∂u3
∂u1
23 =
+
, 31 =
+
.
2 ∂X3
∂X2
2 ∂X1
∂X3
(14)
Die gesamten Winkeländerungen werden als Gleitungen, die mittleren Winkeländerungen
13 und 14 werden als Schubverzerrungen bezeichnet.
eq_2_12
eq_2_13
α-Version vom 3.12.2016
15
Die Deformation eines ursprünglich quaderförmigen Volumenelements in einen Parallelepiped oder Spat kann im Fall kleiner Deformationen also durch die relativen Längenänderungen und die mittleren Winkeländerungen erfasst werden. Diese Verzerrungsgrößen kann
man in einem Matrizenschema anordnen
1 ∂u1
∂u2
1 ∂u1
∂u3
∂u1
+
+
2 ∂X2 ∂X1
2 ∂X3 ∂X1
∂X1
1 ∂u
∂u
∂u
1
∂u
∂u
2
1
2
2
3
+
+
ε=
ˆ
(15)
.
2 ∂X1 ∂X2
∂X2
2 ∂X3 ∂X2
1 ∂u1
∂u3
1 ∂u2
∂u3
∂u3
+
+
2 ∂X3 ∂X1
2 ∂X3 ∂X2
∂X3
eq_2_14
Da das kartesische Koordinatensystem, auf das sich die Darstellung 15 bezieht, willkürlich
gewählt ist, die Verzerrungen aber als physikalische Größen vom Koordinatensystem unabhängig sind, gehört zu der Matrixdarstellung die entsprechende Basisinformation. Dadurch wird bei einer Transformation von einem in ein anderes Koordinatensystem ein bestimmtes Transformationsverhalten festgelegt. Die Kombination der Koeffizienten 15 mit
der zugehörigen Basisinformation definiert dann einen Tensor, den sogenannten Verzerrungstensor. Das nächste Kapitel gibt dazu weitere Informationen.
Die Koeffizienten des Verzerrungstensors berechnen sich alle aus Ableitungen des Verschiebungsvektors nach den Koeffizienten des Ortsvektors. Zusammenfassend können die
Koeffizienten als
∂uj
1 ∂ui
+
(16)
εij =
2 ∂Xj
∂Xi
Die Indices i und j sind dabei Zähler, die die Werte von 1 bis 3 annehmen. In dem Matrizenschema gibt der erste Index die Zeile, der zweite die Spalte an, in der der jeweilige
Koeffizient eingetragen wird. Sind die Indices gleich, i = j, so ergeben sich die Diagonalelemten. Für ungleiche Indices i 6= j ergeben sich die jeweiligen Nebendiagonalelemente,
wobei auf Grund der Konstruktion die Reihenfolge keine Rolle spielt. Der Verzerrungstensor ist symmetrisch.
eq_2_15
Symbolisch kann der Verzerrungstensor durch die Verschiebungsgradienten dargestellt werden. Der Gradient entsteht, wenn man eine Feldgröße nach dem Ortsvektor ableitet. Für
ein Skalarfeld, z.B. das Temperaturfeld Θ(X), ergibt sich der Gradient als Vektor
∂Θ
∂Θ(X)
=
ˆ
Grad Θ =
∂X
∂X1
∂Θ
∂X2
∂Θ
∂X3
.
(17)
Der Spaltenvektor 172 bezieht sich auf die kartesische Basis, in der der Ortsvektor X die
Koeffizienten Xi , i = 1, 2, 3 besitzt, und besteht aus den partiellen Ableitungen des Feldes
eq_2_16
16
Kontinuumsmechanik WS 16/17
Θ(X1 , X2 , X3 ) nach den drei Koeffizienten Xi . Für ein Vektorfeld, z.B. für das Verschiebungsfeld u(X), können alle drei Koeffizienten des Vektors ui nach den drei Koeffizienten
Xj des Ortsvektors abgeleitet werden. Es ergeben sich daher neun Möglichkeiten, die wiederum in einem Matrixschema angeordnet werden können,
∂u
1
∂X1
∂u
∂u2
=
ˆ
Grad u =
∂X ∂X1
∂u
3
∂X1
∂u1
∂X2
∂u2
∂X2
∂u3
∂X2
∂u1
∂X3
∂u2
∂X3
∂u3
∂X3
.
(18)
Bei der Transopsition eines Matrixschemas oder eines Tensors werden die Zeilen und Spalten vertauscht. Unter Ausnutzung der Transposition kann somit der Verzerrungstensor in
symbolscher Notation als
1
Grad u + (Grad u)T
ε =
(19)
2
geschrieben werden. Die symbolische Notation ist von einer konkreten Wahl des Koordinatensystems unabhängig. Mit der Wahl eines bestimmten Koordinatensystems wird die
Darstellung der Koeffizienten in dem zugehörigen Matrixschema festgelegt. Verwendet man
z.B. Zylinder- oder Kugelkoordinaten anstelle von kartesischen Koordindaten ändern sich
die Berechnungsvorschriften für die Koeffizienten der Gradienten. Die Ursache liegt in dem
Transformationsverhalten der Tensoren, wenn man sie von einem in ein anderes Koordinatensystem transformiert.
eq_2_17
eq_2_18
Neben den Längen- und Winkeländerungen, die direkt als Koeffizienten des Verzerrungstensors ablesbar sind, enthält der Verzerrungstensor der geometrisch linearen Theorie auch
noch die Volumendehnung. Zur Herleitung betrachtet man wieder ein rechteckiges Volumenelement in der Referenzkonfiguration. Wenn ein rein volumetrischer Deformationszustand aufgebracht wird, wird das Element größer, ändert aber seine Winkel nicht. Für den
ebenen Fall ist das in der Abbildung 7 dargestellt.
Das Ausgangsvolumen ergibt sich als Produkt der Längen li in den drei Koordinatenrichtungen,
V = l1 l2 l3 .
(20)
eq_2_19
In der Momentankonfiguration hat sich das Volumen um den Betrag ∆V verändert, die
Gestalt des Elementes ist jedoch immer noch ein Quader. Es gilt
V + ∆V = (l1 + ∆l1 )(l2 + ∆l2 )(l3 + ∆l3 ).
(21)
eq_2_20
Mit der Definition der Längenänderungen 9 und der Dehnungen 10 ergibt sich schließlich
V + ∆V = (1 + ε11 )(1 + ε22 )(1 + ε33 )l1 l2 l3 .
(22)
eq_2_21
α-Version vom 3.12.2016
17
Abbildung 7: Volumendehnung eines materiellen Elements fig_linelast_5
Dividiert man diesen Ausdruck durch das Ausgangsvolumen 20 und vernachässigt im Rahmen der geometrisch linearen Theorie zweite und dritte Potenzen der Dehnungen, so folgt
die Volumendehnung als relative Volumenänderung zu
e =
∆V
≈ ε11 + ε22 + ε33 = tr ε.
V
(23)
eq_2_22
Die Vernachlässigung der höheren Potenzen der Dehnungen setzt wieder voraus, dass die
Dehnungen klein sind. In diesem Fall ist die Volumendehnung identisch mit der Summe
der Diagonalelemente des Verzerrungstensors. Diese Summe wird auch als Spur (trace) des
Tensors bezeichnet.
Im Umkehrschluß entspricht ein spurfreier Verzerrungstensor einer reinen Gestaltänderung
bei konstantem Volumen. Aus einem beliebigen Tensor kann man den spurfrei Anteil extrahieren, in dem man den volumetrischen Anteil e/3 I abzieht. Dabei bezeichnet I den
Einheitstensor, der bezüglich einer kartesischen Basis lediglich dreimal den Wert 1 auf der
Diagonalen besitzt. Man erhält den sogenannten deviatorischen Anteil oder Deviator
e
(24)
ε D = ε − I.
3
In der Koeffizientendarstellung ist sofort ersichtlich, dass der Deviator spurfrei ist. Es gilt
D D D
ε11 ε12 ε13
1 0 0
ε11 ε12 ε13
1
D
D
εD
(25)
= ε21 ε22 ε23 − (ε11 + ε22 + ε33 ) 0 1 0 .
21 ε22 ε23
3
D
D
D
0 0 1
ε31 ε32 ε33
ε31 ε32 ε33
eq_2_23
eq_2_24
Da die Spur des Identitätstensors den Wert 3 ergibt, folgt in der symolischen Notation
tr ε D = tr ε −
1
tr ε tr I = 0.
3
(26)
eq_2_25
18
Kontinuumsmechanik WS 16/17
Damit ist gezeigt, dass der Verzerrungsdeviator eine gestaltändernde Deformation bei konstantem Volumen beschreibt.
Die Verzerrungen 19 benötigt man, wenn es darum geht einen Zusammenhang zwischen
den mechanischen Spannungen und der Deformation eines elastischen Bauteils herzuleiten. Falls das Materialverhalten nicht elastisch sondern ratenabhängig ist, benötigt man
ferner die Verzerrungsgeschwindigkeit. Diese ergibt sich aus der zeitlichen Ableitung des
Verzerrungstensors
ε̇ε =
1
d 1
Grad u + (Grad u)T =
Grad v + (Grad v)T .
dt 2
2
(27)
Da die Zeitableitung mit den Ortsableitungen des Gradientenoperators gemäß der Schwarzschen Regel vertauschbar ist, kann die Verzerrungsgeschwindigkeit aus den Gradienten des
Geschwindigkeitsfeldes v berechnet werden. Die Verzerrungsgeschwindigkeit ist wie die
Verzerrung selbst eine tensorielle Größe. Die Koeffizienten auf der Diagonalen geben ab,
mit welcher Geschwindigkeit sich die Länge der Kanten von Volumenelementen ändern, die
Nebendiagonalelemente entsprechen den Änderungsgeschwindigkeiten der Winkel.
2.3
Massen-, Impuls- und Drallbilanz
Während die kinemastischen Überlegungen des vorangegangenen Abschnitts eine Verknüpfung zwischen der Verschiebung der materiellen Punkte und den Verzerrungen herstellen, stellen die Bilanzgleichungen die mathematische Formulierung der physikalischen
Erhaltungsaussagen dar. In der klassischen Physik1 die Bilanzgleichungen axiomatisch eingeführt. Man beobachtet also immer wieder und in den unterschiedlichsten Situationen die
selben Sachverhalte und folgert, dass diese Beobachtungen universellen Charakter haben.
Die aufgestellten Axiome bilden die Grundlage für die folgenden theoretischen Betrachtungen. Sie können im Rahmen der Theorie nicht bewiesen werden, sondern sie sind vielmehr
das Fundament, auf dem die weiteren Betrachtungen aufbauen.
Für die Kontinuumsmechanik spielen die Massen-, die Impuls- und die Drallbilanzen eine
wesentliche Rolle. Die entsprechenden Axiome lassen sich folgendermaßen formulieren:
• Massenbilanz
Die Masse eines materiellen Körpers ist während seiner Bewegung konstant.
• Impulsbilanz
Der Impuls eines materiellen Körpers ändert sich durch die Kräfte, die an dem Körper
angreifen (2. Newtonsches Axiom).
1
Relativistische Effekte werden im Weiteren nicht betrachtet. Alle Prozesse finden im Rahmen der
Gültigkeit der klassischen Physik statt.
eq_2_26
α-Version vom 3.12.2016
19
Abbildung 8: Materieller Körper mit materiellem Volumenelement fig_linelast_6
• Drallbilanz
Der Drall eines materiellen Körpers ändert sich durch die Momente, die an dem
Körper angreifen.
In der vorliegenden verbalen Fassung sind die Bilanzaussagen für den gesamten Körper formuliert. Diese globalen Aussagen müssen in einer geeigneten mathematischen Darstelllung
angegeben werden, damit es möglich wird, das mechanische Verhalten materielle Körper zu
berechnen. Da für deformierbare Körper der Deformationszustand in der Regel inhomogen
ist, ist eine lokale Formulierung der Bilanzaussagen erforderlich. Eine entsprechende Darstellung wird möglich, wenn man von dem Schnittprinzip gebraucht macht. Das Schnittprinzip gestattet es beliebige Teile eines Körpers zu betrachten, wenn die Interaktionen
zwischn den Einzelteilen, die durch den gedachten Schnitt sichtbar werden, entsprechend
berücksichtigt werden.
Zur Herleitung der Massenbilanz betrachtet man ein materielles Volumenelement der Größe
∆V , das aus einem Körper geschnitten wird, vgl. Abbildung 8. Ein materielles Volumenelement bewegt sich dabei mit dem Körper mit. Da sich Materie nicht selbst durchdringen
kann, kann keine Masse über den Rand des materiellen Volumenelements transportiert
werden. Gemäß der Massenbilanz muß dann die Masse im Inneren des Volumenelements
konstant bleiben.
In dem Volumenelement der Größe ∆V befindet sich die Masse ∆m. Da nach der Kontinuitätsannahme die Masse eine kontinuierlich verteilte Größe ist, kann man den Grenzwert
immer kleiner werdender Volumen betrachtet. In der Referenzkonfiguration hat das Volu-
20
Kontinuumsmechanik WS 16/17
menelement die Größe ∆V0 , und es beinhaltet die Masse ∆m. In der Momentankonfiguration hat sich die Größe des Volumens durch die Volumendehnung verändert. Der aktuelle
Wert beträgt ∆V . Zwischen den Volumenelementen der Referenz- und der Momentankonfiguration besteht nach 24 der Zusammenhang
∆V0 (1 + e) = DeltaV
(28)
eq_2_27
Da das Volumenelement ein materielles Element ist, muss während der Bewegung die Masse
in diesem Volumen konstant sein. Damit folgt
∆m
∆m
= (1 + e)
∆V0
∆V
(29)
eq_2_28
Betrachtet man im nächsten Schritt den Grenzwert kleiner werdender Volumina, dann
folgt für die Massendicht ρ0 in der Referenzkonfiguration und die Massendichte ρ in der
Momentankonfiguration
∆m
∆m
= (1 + e) ρ,
= (1 + e) lim
∆V →0 ∆V
∆V0 →0 ∆V0
ρ0 = lim
(30)
eq_2_29
bzw.
1
ρ0 ≈ (1 − e) ρ0 .
(31)
1+e
Der zweite Teil von 31 gilt wiederum nur für kleine Volumendehnungen, setzt also die
Gültigkeit der geometrisch linearen Theorie voraus. Die Massenbilanz verknüpft somit
die Massendichte ρ0 mit der aktuellen Massendichte ρ über die Volumendehnung. Da die
Betrachtung für den Grenzwert ∆V → 0 durchgeführt wurde, stellt 31 eine lokale Aussage
dar, die an jedem Punkt im Inneren des materiellen Körpers Gültigkeit besitzt.
ρ =
Das zweite Newtonsche Axiom oder die Impulsbilanz kann als Definition des Begriffs der
Kraft angesehen werden. Kraft ist demnach die Wirkung auf einen materiellen Körper, die
zu einer Impulsänderung führt. In einer globalen Formulierung kann der Schwerpunktsatz
formuliert werden als
d
(m vS ) = F.
(32)
dt
Dabei ist m die Masse, VS die Schwerpunktgeschwindigkeit und F die resultierende Kraft,
vgl. Abbildung 9.
eq_2_30
eq_2_31
Diese Aussage 32 muss, genau wie die Massenbilanz, für beliebige Teilkörper formuliert
werden. Dazu wird wieder ein materielles Volumenelement ∆V aus dem Köper geschnitten. Durch den Schnitt werden die lokalen Kräfte auf den Oberflächen des Volumenelements sichtbar. Abbildung 10 zeigt auf einer Teilfläche ∆A die lokale Schnittkraft ∆F. Da
durch die Kontinuitätsannahme garantiert ist, dass die Schnittkräfte gleichmässig auf den
Schnittflächen verteilt sind, existiert der Grenzwert
∆F
.
∆A→0 ∆A
t = lim
(33)
eq_2_32
_linelast_7
α-Version vom 3.12.2016
21
Abbildung 9: Zur Impulsbilanz: Materieller Körper mit Schwerpunktgeschwindigkeit und
resultierender Kraft
Die lokale Flächenkraft t heißt Spannungsvektor. Die Einheit ist Kraft pro Fläche, also
1 N/mm2 . Typischerweise wird der Spannungsvektor in seine Komponenten senkrecht zur
Schnittfläche und tangential zur Schnittfläche aufgeteilt. Im skizzierten Fall ist der Normalenvektor n des Flächenelements identisch mit dem Basisvektor e1 . Die Normalspannung
senkrecht zu dem Flächenelement ergibt sich damit zu
σ = t · n = t1 .
(34)
eq_2_33
Die Schubspannungskomponenten, die tangential zu der Fläche ∆A wirken, zeigen im skizzierten Beispiel in die X2 - und die X3 -Richtung. Formal erhält man diese Anteile, wenn
man von dem Spannungsvektor t den Normalspannungsanteil σ n subtrahiert.
Der Spannungszustand an einem infinitesimalen Volumenelement ist vollständig bestimmt,
wenn man die Spannungsvektoren auf drei senkrecht zu einander orientierten Schnittflächen
kennt. Der Sachverhalt kann für den ebenen Fall leicht durch Abbildung 11 verdeutlicht
werden.
Im linken Teil von Abbildung 11 ist das Volumenelemen mit der Gleichgewichtsgruppe der
Spannungsvektoren t1 und t2 dargestellt. Da das Element infinitesimal ist und auf den
paarweise gegenüber liegenden Flächen jeweils gleich große Spannungsvektoren angreifen,
die eine zentrale Kräftegruppe bilden, ist die skizzierte Gruppe eine Gleichgewichtsgruppe.
Die Spannungsvektoren lassen sich in die Koordinatenrichtungen zerlegen. Es gilt für den
ebenen Fall
σ11
σ12
t1 =
ˆ
, t2 =
ˆ
.
(35)
σ21
σ22
Der Spannungsvektor t1 wird durch die Schnittkraft auf der Fläche mit der Normalen n =
e1 hervorgerufen, analog ist t2 auf der Fläche mit der Normalen n = e2 definiert. Für die
eq_2_34
linelast_10
22
Kontinuumsmechanik WS 16/17
Abbildung 10: Freigeschnittenes Volumenelement mit den wirkenden lokalen Kräften fig_linelast_
Abbildung 11: Belastetes Volumenelement a) orientiert an den Koordinatenrichtungen und
b) mit einer beliebigen Schnittfläche
α-Version vom 3.12.2016
eq_2_34
23
Bezeichnung der Koeffizienten in der Darstellung gibt damit der zweite Index die Richtung
der Flächennormalen von der Fläche an, auf der der Spannungsvektor definiert ist. Der
erste Index gibt jeweils die Richtung an, in die der jeweilige Koeffizient zeigt. Konkret heißt
das: σij ist der Koeffizient eines Spannungsvektors, der auf der Fläche mit der Normalen
n = ej definiert ist und in Richtung ei zeigt. Auf der Fläche mit der Normalen e1 ist daher
die Spannung σ11 eine Normalspannung während die Spannung σ21 eine Schubspannung
ist. Auf der Fläche mit der Normalen e2 verhält es sich genau andersherum, σ12 ist die
Schubspannung und σ22 die Normalspannung. Folgt man der eingeführten Indizierung, so
ist eine Spannungskomponenten immer dann eine Normalspannung, wenn die Indices gleich
sind, ansonsten eine Schubspannung.
Mit Bezug auf den rechten Teil der Abbildung 11 kann nun auch ein Spannungsvektor
t=(t
ˆ 1 , t2 ) bestimmt werden, der auf einer beliebigen Fläche mit der Normalen n definiert ist, die nicht mit einer der Koordinatenrichtungen zusammenfällt. Im vorliegenden
Fall ist die Fläche unter dem Winkel α zur e1 -Achse geneigt. Wenn die Schnittfläche die
Größe ∆A, dann ergeben sich die proijezierten Flächen in die X1 - und in die X2 -Richtung
zu ∆A cos α bzw. ∆A sin α. Die Normale der Schnittfläche ∆A ist durch den Winkel α
ebenfalls bestimmt
n1
sin α
n=
ˆ
=
.
(36)
n2
cos α
eq_2_35
Da die Spannungsvektoren t1 und t2 an dem ursprünglichen Volumenelement eine Gleichgewichtsgruppe dargestellt haben, muß auch das abgeschnittene Dreieck, im dreidimensionalen Fall der abgeschnittene Tetraeder, im Gleichgewicht sein. Das Kräftegleichgewicht
läßt sich dann wie folgt angeben:
→: t1 ∆A, − σ11 ∆A sin α − σ12 ∆A cos α = 0,
↑:
t2 ∆A, − σ21 ∆A sin α − σ22 ∆A cos α = 0.
(37)
eq_2_36
Klammert man das Flächenelement ∆A aus und identifiziert man die trigonometrischen
Funktionen mit den Koeffizienten des Normalenvektors ??, so erhält man
t1 = σ11 n1 + σ12 n2 ,
t2 = σ21 n1 + σ22 n2 .
(38)
eq_2_37
(39)
eq_2_38
Diese Ausdrücke lassen sich kompakt durch folgende Summenformel darstellen
ti =
X
σij nj .
j
Führt man die skizzierte Überlegung in drei Dimensionen durch, so gelangt man ebenfalls wieder zu der Darstellung 39, wobei allerdings die Indices i und j von 1 bis 3, also
über alle Koordinatenrichtungen, laufen. Ordnet man die Koeffizienten der drei gegebenen
24
Kontinuumsmechanik WS 16/17
Spannungsvektoren wiederum in einem Matrizenschema an
σ11 σ12 σ13
σ=
ˆ σ21 σ22 σ23 ,
(40)
eq_2_39
(41)
eq_2_40
σ31 σ32 σ33
so kann 39 als Matrix-Vektor-Produkt
t1
t2 =
t3
interpretiert werden
σ11 σ12 σ13
n1
σ21 σ22 σ23 n2 .
n3
σ
σ
σ
31
32
33
Die Koeffizienten des Spannungsvektors t auf der Schnittfläche mit der Normalen n ergeben sich dann aus den Produkten der Zeilen der Matrix σ mit dem Spalenvektor n. Die
Beziehung 41 stellt das Cauchy-Theorem dar. Der Spannungszustand an einem materiellen
Punkt ist demnach vollständig charakterisiert, wenn die Spannungsvektoren auf drei jeweils senkrecht aufeinander stehenden Ebenen bekann sind. Die Komponenten dieser drei
Spannungsvektoren wenden im Spannungstensor gesammelt, d.h. neben der Matrix mit
den Koeffizienten 40 ist noch die Richtungsinformation in Form der gewählten Basis für
eine eindeutige Darstellung notwendig. Genau wie beim Verzerrungstensor ist auch hier
das Transformationsverhalten bei einem Wechsel des Basissystems ausschlaggebend.
In der Abbildung 12 ist ein materielles Volumenelement gezeigt, das aus einem belasteten
materiellen Körper freigeschnitten wurde. Aus Gründen der Übersichtlichkeit ist die Skizze
wieder zweidimensional. Eine Erweiterung auf drei Dimensionen erfolgt analog. Das skizzierte Element ist entlang der Koordinatenachsen orientiert. Die Schnittkräfte können auf
den Rändern als konstant angenommen werden, da das Element als infinitesimal klein angenommen wird. Die entsprechenden Spannungsvektoren lassen sich dann direkt durch Koeffizienten des Spannungstensors darstellen. Von der linken zur rechten bzw. von der unteren
zur oberen Seite des Volumenelements können sich die wirkendn Spannungen verändern.
Ursache dafür sind die Volumenkräfte b und die Impulsänerung des Elements.
Für das skizzierte Element kann man nun die Impulsbilanz oder das zweite Newtonsche
Axiom angeben. Mit der Masse ∆m des Elements gilt für die Impulsänderung
∆m v̇ = R.
(42)
eq_2_41
Die resultierende Kraft R besteht aus den resultierenden Volumenkräften b ∆X1 ∆X2 und
den resultierenden Oberflächenkräften, die sich als Produkt der Spannungsvektoren mit
den jeweiligen Seitenflächen des Elements ergeben. Bezüglich des kartesichen Koordinatensystems folgt dann
∆m v̇1 = b1 ∆X1 ∆X2 + (σ11 + ∆σ11 )∆X2 + (σ12 + ∆σ12 )∆X1 − σ11 ∆X2 − σ12 ∆X1
∆m v̇2 = b2 ∆X1 ∆X2 + (σ21 + ∆σ21 )∆X2 + (σ22 + ∆σ22 )∆X1 − σ21 ∆X2 − σ22 ∆X1 .
(43)
eq_2_42
α-Version vom 3.12.2016
25
Abbildung 12: Impulsbilanz am Volumenelement fig_linelast_8
Dabei kürzen sich die absoluten Spannungsanteile σ11 , σ12 , σ21 und σ22 aus den Gleichungen. Dividiert man beide Gleichungen noch durch das Volumen ∆V = ∆X1 ∆X2 , so erhält
man schließlich folgende Beziehungen
∆σ11
∆σ12
∆m
v̇1 = b1 +
+
,
∆V
∆X1
∆X2
∆m
∆σ21
∆σ22
v̇2 = b2 +
+
.
∆V
∆X1
∆X2
(44)
eq_2_43
Im letzten Schritt kann der Grenzwert ∆X1 → 0 und ∆X2 → 0 durchgeführt werden. Mit
der Definition der Dichte ρ = lim ∆m/∆V und der Definition der partiellen Ableitungen
∆V →0
∂(•)/∂Xi =
lim (•)/∆Xi lautet die lokale Impulsbilanz für den materiellen Punkt
∆Xi →0
∂σ11
∂σ12
+
,
∂X1
∂X2
∂σ22
∂σ21
= b2 +
+
.
∂X1
∂X2
ρ v̇1 = b1 +
ρ v̇2
(45)
eq_2_44
Die beiden Gleichungen stellen die Komponenten der Impulsbilanz bezüglich der Koordinatenrichtungen X1 und X2 dar. Für die Richtung i = 1, 2 kann man kompakt schreiben
ρ v̇i = bi +
∂σi1
∂σi2
+
.
∂X1
∂X2
(46)
eq_2_45
26
Kontinuumsmechanik WS 16/17
Weiterhin kann man die Summe über die Änderungen des Spannungszustands über einen
weiteren Summationsindex j darstellen
ρ v̇i = bi +
2
X
∂σij
j=1
∂Xj
.
(47)
eq_2_45
Erweitert man das aufgezeigte Vorgehen auf drei Dimensionen, so entstehen Gleichungen
der Art47 für die Richtungen i = 1, 2, 3. Die Summe über die Spannungsterme läuft dann
ebenfalls über die Indexwerte j = 1, 2, 3.
Der Vektor
3
X
∂σij
(48)
eq_2_46
beinhaltet die partiellen Ableitungen des Spannungstensors. Im Gegensatz zum Gradienten wird hier jedoch ein Summenausdruck verwendet, der den Spannungstensor in einen
Vektor überführt. Dieser Vektor ist die Divergenz des zugehörigen Tensors. Genau wie der
Gradient stellt die Divegenz einen Differentialoperator dar. Übersetzt man die Komponentengleichungen 47 in die absolute Darstellung, so entsteht folgende Form der Impulsbilanz
für den materiellen Punkt
ρ v̇ = b + Div σ.
(49)
eq_2_47
div σ =
ˆ
j=1
∂Xj
Diese Aussage entspricht dem zweiten Newtonschen Gesetzt für den Massepunkt bzw. dem
Schwerpunktsatz für den starren Körper in der Form Kraft gleich Masse mal Beschleunigung. Die Masse wird dabei für den materiellen Punkt durch die Massendichte ersetzt.
Die Kraft entspricht der resultierenden Kraftdichte aus der Volumenkraftdichte b und der
Änderung des Spannungszustands am materiellen Punkt.
Die dritte Bilanz, die zur Formulierung eines rein mechanischen Problems benötigt wird,
ist die Drallbilanz. Analog zur Impulsbilanz wird in de Drallbilanz die Dralländerung mit
der Wirkung von Momenten verknüpft. Da die Spannungen auf den Rändern des Volumenelements als konstant angesehen werden, üben die Normalspannungen σ11 und σ22
keine Moment bezüglich des Schwerpunktes S aus. Momente entstehen lediglich durch die
Schubspannungen σ12 und σ21 . Die entsprechenden Hebelarme sind ∆X1 und ∆X2 . Da
Spannungsänderungen von der einen auf die andere Seite des Volumens klein sind und der
Grenzfall eines infinitesimalen Volumens betrachtet wird, können die Momente der Spannungsänderungen ∆σ12 und ∆σ21 vernachlässigt werdn. Sie sind von höhrer Ordnung klein,
wenn der entsprechende Grenzwert ∆X1 → 0 und ∆X2 → 0 durchgeführt wird. Mit dem
Trägheitsmoment Θ und der Winkelgeschwindigkeit ω bezüglich der Achse senkrecht zur
Zeichenebene von Abbildung 13 folgt dann
d(Θ ω)
= σ12 ∆X1 ∆X2 − σ21 ∆X2 ∆X1 .
dt
(50)
Da das Trägheitsmoment mit der vierten Potenz der Abmessung des Volumens gebildet
wird, ist im Grenzfall eines infinitesimalen Volumens dieser Ausdruck gegenüber Termen
eq_2_48
α-Version vom 3.12.2016
27
Abbildung 13: Zur Drallbilanz am materiellen Volumenelement fig_linelast_11
28
Kontinuumsmechanik WS 16/17
auf der rechten Seite von 50 vernachlässigbar klein. Die Drallbilanz liefert somit für ein
infinitesimales Volumenelement die Symmetrie des Spannungstensors
σ12 = σ21 .
(51)
eq_2_49
(52)
eq_2_50
Analoge Überlegungen gelten auch bezüglich der beiden anderen Koordinatenebenen
σij = σji
bzw.
σ = σT .
Die Herleitung setzt voraus, dass der materielle Punkt als mathematischer Punkt die physikalischen Gegebenheiten korrekt abbildet. Für viele technische Anwendungen trifft dies zu,
da die Mikrostruktur der Werkstoffe klein gegenüber den Bauteilabmessungen ist. Durch
die Gleichung 52 wird dann das Boltzmann-Kontinuum definiert. Man geht dabei davon
aus, dass mögliche Mikrostrukturen keinen Einfluß auf das mechanische Verhalten haben.
Für miniaturisierte Bauteile oder Werkstoffe, die eine große innere Struktur aufweise, wie
etwa geschäumte Materialien, trifft diese Annahme jedoch nur noch bedingt zu. In diesem
Fall müssen Konzepte erweiterter Kontinua herangezogen werden. Das wohl bekannteste
erweiterte Kontinuum ist das Cosserat-Kontinuum. In diesem Fall geht man davon aus,
dass die Mikrostruktur durch Starrkörper auf der Mikroskala abgebildet wird, so dass
neben Kraftspannungen unabhängige Momentenspannungen auf den Rändern des materiellen Volumenelements auftreten können. In diesem Fall ist der Spannungstensor nicht
mehr symmetrisch.
Für die weiteren Untersuchungen wird die Symmetrie des Spannungstensors vorausgesetzt.
Die Drallbilanz liefert keine zusätzlichen Informationen, wenn man für die Konstitutivgleichungen, die den Zusammenhang zwischen den Spannungen und den kinematischen Größen
herstellen, einen Ansatz wählt, der nur symmetrische Spannungszustände gestattet.
Die Kinemati und die Massen-, Impuls- und Drallbilanz liefern im Fall der geometrisch
linearen Kontinuumsmechanik die folgenden Aussagen
ε = 21 Grad u + (Grad u)T ,
=
ρ0 (1 − tr ε ),
ρ v̇ =
b + Div σ,
ρ
σ
sec_hooke
2.4
=
(53)
σT .
Das verallgemeinerte Hookesche Gesetz
Die Gleichung 533 gestattet die Berechnung der Verschwindigkeit (bzw. nach einer zeitlichen Integration der Verschiebung), wenn die Spannung als Funktion der Dehnung gegeben
ist. Da die Herleitung der Gleichungen bislang keine Annahme über das Materialverhalten
beinhaltet, sondern nur von der Annahme kleiner Verschiebungen und kleiner Verschiebungsgradienten Gebrauch macht, muss der Zusammenhang zwischen den Spannungen
eq_2_51
α-Version vom 3.12.2016
29
Abbildung 14: Zugprobe nach ISO 527-2:1996 fig_linelast_12
und den kinematischen Größen materialabhängig sein. Eine Ermittlung dieser Konstitutivgleichungen muss daher immer in Anlehung an entsprechende Experimente erfolgen.
Das einfachste Experiment, das sich im technischen Bereich zur Ermittlung der Werkstoffeigenschaften etabliert hat, ist der einachsiale Zugversuch. Dazu wird eine lange und schlanke
Probe aus dem Werkstoff hergestellt und in ihrer Längsrichtung einachsial belastet. Abbildung 14 zeigt eine typische Probe nach ISO 527-2:1996. Die verbreiterten Ende gestatten
eine Einspannung der Probe in der Prüfmaschine. Der lokal inhomogene Spannungszustand
im Bereich der Einspannungen klingt mit zunehmender Entfernung von der Spannstelle ab
und geht im mittleren Bereich der Probe schnell in einen homogenen und einachsialen
Spannungszustand über, der dort allerdings einen homogenen aber dreiachsialen Deformationszustand hervorruft. Während man im Zugversuch eine achsiale Verlängerung ∆l der
Probe feststellt, die durch die Traversenbewegung der Prüfmaschine hervorgerufen wird,
beobachtet man in den beiden Querrichtungen eine Dicken- und Breitenabnahme ∆d bzw.
∆b. Neben der Verlängerung und der Dicken- und Breitenänderung wird im Zugversuch
die Kraft gemessen, die zur Verlängerung der Probe erforderlich ist.
Da die Zustände im Zentrum der Probe homogen sind, können aus den globalen Messgrößen
lokale Informationen berechnet werden. Die Dehnungen in den drei Achsrichtungen ergeben
sich zu
∆d
∆b
∆l
ε11 =
, ε22 =
, ε33 =
.
(54)
l
d
b
Wenn die Probe exakt in X1 -Richtung ausgerichtet ist, treten keine Schubdeformationen
auf. Die gemessene Kraft kann auf die Querschnittsfläche bezogen werden und ergibt dann
die Normalspannung in Längsrichtung
σ11 =
F
.
bd
(55)
Abbildung 14 zeigt typische Kraft-Verschiebungs-Verläufe, die a) für eine Probe aus Aluminium und b) für eine rußgefüllte Gummiprobe gemessen wurden. Für beide Proben kann
das Verhalten bei kleinen Deformationen durch eine Gerade im Ursprung approximiert
eq_2_52
eq_2_53
linelast_13
30
Kontinuumsmechanik WS 16/17
Abbildung 15: Kraft-Verschiebungskurven im einachsialen Zugversuch für a) Aluminium
und b) rußgefülltes Gummi
werden. Dabei wird weiterhin vorausgesetzt, dass die auftretenden Kräfte so klein sind,
dass die beobachteten Deformationen reversibel sind. Nach einer Entlastung nehmen die
Proben also wieder ihre Ausgangslänge und ihren Ausgangsquerschnitt an. Die weiteren
Überlegungen in diesem Kapitel werden auf diesen Bereich des linear-elastischen Verhaltens beschränkt. Die Betrachtung der Hystereseschleifen, die in Abbildung 15 sichtbar sind,
folgen später und führen zu deutlich komplexeren Modellen.
Unter der Annahme der Linearität gilt dann für die Spannung σ11 in Probenlängsrichtung
σ11 = E ε11 .
(56)
Diese Beziehung stellt das einachsiale Hookesche Gesetz dar. Die Konstant, die die Dehung
und die Spannung verknüpft, ist der Elastizitätsmodul oder E-Modul E. Er ist per Definition eine Werkstoffkonstant und stellt die Steigung der Spannung-Dehnungs-Linie im
Zugversuch am Ursprung dar. Zur Bestimmung des E-Moduls aus Experimenten werden
in der Regel Sekanten an die in der Realität gekrümmte Kennlinie verwendet. Da die Dehnung als relative Längenänderung dimensionslos ist und die Spannung die Dimension einer
Flächenkraft hat, folgt
N
.
(57)
[E] = 1
mm2
Im betrachteten linearen Bereich stellt man weiterhin fest, dass die Querdehnungen ε22
und ε33 linear mit der Längsdehnung anwachsen. Falls der Werkstoff isotrop ist, misst man
in beiden Querrichtungen die gleichen Dehnungen, ε22 = ε33 . Da eine Verlängerung der
Probe mit ε11 > 0 zu negativen Werten ε22 = ε33 < 0, führt, wird der Vorzeichenwechsel
in die Definition der Querkontrationszahl ν aufgenommen
ν = −
ε22
ε33
= −
.
ε11
ε11
eq_2_54
eq_2_55
(58)
eq_2_56
Genau wie der E-Modul ist die Querkontraktion eine Werkstoffkonstante. Der Wertebereich
ist auf
− 1 < ν ≤ 0, 5
(59)
eq_2_57
α-Version vom 3.12.2016
31
beschränkt. Während die obere Grenz den inkompressiblen Grenzfall darstellt, bei dem
der Werkstoff keine Volumendehnungen erfährt, folgt die untere Grenze aus thermodynamischen Restriktionen. Die meisten technischen Werkstoffe zeigen jedoch ein Verhalten, das
auf positive Werte für ν führt. Materialien mit negativen Querkontraktionszahlen werden
als auxetisch bezeichnet. Dieses Verhalten kann beobachtet werden, wenn nicht-konvexe
Mikrostrukturen vorliegen. In der Regel ist auxetisches Verhalten mit einer ausgeprägen
Anisotropie verbunden und wird daher im Weiteren nicht näher behandelt.
Aus diesen Überlegungen folgt, dass zur Beschreibung linear-elastischen Verhaltens zwei
Konstanten benötigt werden. Am einachsialen Zugversuch wird so einer technischen Sichtweise die Einführung des E-Moduls und der Querkontraktionszahl motiviert. Von mathematischer Seite sind die Laméschen Konstantenµ und λ günstiger. Ein dreidimensionaler
Zusammenhang zwischen dem Spannungstensor und dem Dehnungstensor laässt sich mit
den Lamé-Parameter als
σ = 2µ ε + λ tr(εε) I
(60)
eq_2_58
angeben. Dabei wird die Volumendehnung tr(εε) I durch den zweiten Parameter λ getrennt
bewertet. Formale Überlegungen im Rahmen des Tensorkalküls zeigen, dass der Zusammenhang 60 der generelle lineare Zusammenhang zwischen zwei isotropen Tensoren ist. Durch
die Betrachtung des eindimensionalen Zugversuchs als Sonderfall kann der Zusammenhang
zwischen den beiden Laméschen Parametern µ und λ und den Ingenieurkonstanten E und
ν gezeigt werden.
Das allgemeine Materialgesetz der linearen Elastizität 60 geht mit den Annahmen des
einachsialen Zugs für den Spannungs- und Dehnungszustand über in die Koeffizientendarstellung
σ11 0 0
ε11 0
0
1 0 0
0
0 0 = 2µ 0
ε22 0 + λ (ε11 + ε22 + ε33 ) 0 1 0 . (61)
0
0 0
0
0
ε33
0 0 1
Die Querdehnungen ε22 und ε33 sind im einachsialen Zugversuch gleich, wenn das Materialverhalten isotrop ist. Aus der zweiten bzw. dritten Gleichung folgt der Zusammenhang
zwischen der Längsdehnung ε11 und den Querdehnungen zu
λ
ε11 =: − ν ε11 .
(62)
ε22 = ε33 = −
2 (µ + λ)
rheo120a
rheo130
Einsetzen dieses Ergebnisses in die erste Gleichung liefert schließlich den Zusammenhang
zwischen Zugspannung und Achsialdehnung
σ11 =
µ (3 λ + 2 µ)
ε11 =: E ε11 .
λ+µ
(63)
Aus dem direkten Vergleich der Koeffizienten in den Gleichungen von 62 und 63 folgt die
Identifikation des Elastizitätsmodul
µ (3 λ + 2 µ)
E =
.
(64)
λ+µ
rheo140
rheo160
32
Kontinuumsmechanik WS 16/17
und der Querdehnzahl
ν =
λ
.
2 (µ + λ)
(65)
rheo180
Ein weiterer Versuch zur Materialcharakerisierung ist der einfachen Scherversuch. Dazu
wird eine Probe auf zwei parallel liegenden Ränder durch eine tangential Verschiebung belastet. Dabei treten idealerweise nur Schubspannungen τ = σ12 und Gleitungen γ = 2 ε12
auf. Von Seiten der experimentellen Mechanik ist der Scherversuch äußerst komplex. Er
wird in der skizzierten Form eigentlich nicht durchgeführt, da sich in der Realität stark inhomogene Spannungsverteilungen in den Ecken der Probe ausbilden. Die Realisierung eines
Schubspannungszustandes geschieht in der Regel durch Torsionsversuche an dünnwandigen
Rohren.
Der allgemeine Zusammenhang ?? lautet für den Schubversuch
τ = µ γ = 2 µ ε12 .
(66)
rheo190
(67)
rheo200
Damit identifiziert man den Schermodul aus dem allgemeinen Ansatz als
G = µ.
Schließlich findet man im hydrostatischen Kompressionsversuch einen Zusammenhang zwischen der Volumendehnung e = tr ε und der mittleren Normalspannung σm = 13 tr σ
σm = − p = k e
(68)
rheo210
Aus dem Vergleich von 68 mit der allgemeinen Darstellung ?? ergibt sich in diesem Fall
die Identifikation des Kompressionsmoduls
k = 2 µ + 3 λ.
(69)
rheo240
Insgesamt benutzt man in der linearen Elastizitätstheorie 6 verschiedene Konstanten, von
denen jedoch nur zwei unabhängig sind. Die mathematische Form eines linearen Zusammenhangs zwischen zwei Tensoren verwendet dabei häufig die beiden die Lamé-Konstanten
µ und λ. Die anderen Konstanten sind den typischen Randwertproblemen angepasst. Der
Elastizitätsmodul E und die Querkontraktionszahl ν entstammen dem einachsialen Zugversuch, der Schubmodul G und der Kompressionsmodul k können direkt in den jeweiligen
Versuchen ermittelt werden. Sind zwei der insgesamt sechs Konstanten bekannt, so können
dann die verbleibenden vier Konstanten durch diese beiden a usgedrückt werden. Eine
Zusammenstellung findet sich in Tabelle 2.
Das Randwertproblem der linearen Elastiztitätstheorie wird durch die Impulsbilanz in der
lokalen Form
ρ0 v̇ = div σ + b,
(70)
rheo250
α-Version vom 3.12.2016
33
λ=
µ=G=
λ, µ
λ
µ
λ, ν
λ
µ, E
E, ν
E=
ν=
λ
2(λ + µ)
λ(1 − 2ν)
2ν
µ(3λ + 2µ)
λ+µ
(1 + ν)(1 − 2ν)λ
ν
µ
E
E − 2µ
2µ
E
2(1 + ν)
E
ν
µ(E − 2µ)
3µ − E
Eν
(1 + ν)(1 − 2ν)
ν
Tabelle 2: Zusammenhang zwischen den elastischen Konstanten tab_2_1
durch die kinematischen Beziehungen
ε =
1
grad u + (grad u)T
2
(71)
rheo260
(72)
rheo270
und durch das Materialgesetz
σ = 2 µ ε + λ (tr ε ) I
bestimmt. Durch die Annahme der Linearität des Modells tritt im Beschleunigungsterm der
Impulsbilanz nur die konstante Dichte ρ0 der Referenzkonfiguration auf. Die Definition der
Verzerrung und die Form des Elastizitätsgesetzes sind auf Grund der getroffenen Annahmen
bei der Herleitung linear.
Die drei Ausgangsgleichungen können kombiniert werden, wenn man die kinematische Beziehung 71 in das veralltemeinerte Hookesche Gesetz 72 und dieses wiederum in die Impulsbilanz 70 einsetzt. Zur Ausführung der entsprechenden Operatoren benötigt man die
folgenden Identitäten
div grad u = ∆u,
(73)
div gradT u = grad div u,
div(e I)
= grad e.
rheo280
Dabei stellt ∆(·) den Laplace-Operator dar, der aus den zweiten Ableitungen gebildet wird.
Unter Ausnutzung dieser Identitäten folgt
ρ0 v̇ = µ ∆ u + (µ + λ) grad div u + f .
(74)
Diese Grundgleichung der linearen Elastizitätstheorie ist eine partielle Differenzialgleichung
zweiter Ordnung im Raum und in der Zeit, die unter Vorgabe von geeigneten Rand- und
Anfangsbedingungen gelöst werden kann. Die Gleichung ist als Lamé-Naviersche Verschiebungsgleichung bekannt. Die Lösung dieser Gleichung ist das Verschiebungsfeld u, das
rheo290
34
Kontinuumsmechanik WS 16/17
sich unter den gegebenen Belastungen einstellt. Die Belastungen erfolgen dabei einerseits
über die Volumenkraft b und andererseits über Randlasten t, die durch entsprechende
Randbedingungen vorgegeben werden. Ist das Verschiebungsfeld bekannt, so können die
Verzerrungen und die Spannungen aus den Beziehungen 71 und 72 berechnet werden. In
Sonderfällen kann die Lamé-Naviersche Gleichung analytisch gelöst werden, häufig bedient
man sich jedoch numerischer Näherungsverfahren, z. B. der Methode der Finiten Elemente
(FEM), um die Lösung zu approximieren.
Das hier skizzierte Vorgehen ist typisch für die Entwicklung eines mechanischen Modells.
Grundsätzlich werden Bilanzgleichungen (physikalische Erhaltungsgleichungen) mit kinematischen Beziehungen (Beschreibung des Bewegungs- oder Verschiebungszustands) und
mit Stoffgesetzen (hier: lineare Elastizität, verallgemeinertes Hookesches Gesetz) kombiniert. Das entstehende System von Differenzialgleichungen kann dann bei Vorgabe von
Rand- und Anfangsbedingungen (meist numerisch) gelöst werden.
α-Version vom 3.12.2016
3
35
Tensorrechnung
Im vorherigen Kapitel sind die Grundgleichungen der linearen Elastitzitätstheorie hergeleitet worden. Dabei wurden die Herleitungen an einem Voluemelement motiviert, das aus
dem materiellen Körper herausgeschnittn wurde. Im Nachgang konnte der Grenzfall eines
infinitesimal kleinen Volumenelements untersucht werden, in dem der Grenzwert ∆V → 0
durchgrührt wurde. Die Herleitungen haben dabei in anschaulicher Weise Gebrauch von
bekannten Aussagen der Differentialrechung und der Vektorrechnung gemacht. Die Anordnung von drei Koeffizienten von jeweils drei Vektoren in Matrizen hat die Einführung von
Tensoren mitgebracht. Im vorliegenden Kapitel werden die Überlegungen dazu auf ein entsprechendes theoretisches Fundament gestellt und in eine formale Darstellung eingebettet,
da die Tensoralgebra und -analysis ein wesentliches Werkzeug der Kontinuumsmechanik
darstellt.
3.1
Tensoralgebra
Grundsätzlich ist für die Darstellung physikalischer Größen eine unterschiedliche Anzahl
von Maßzahlen notwendig. Wenn die Angabe einer Maßzahl ausreicht, um eine physikalische Größe zu definieren, so ist diese Größe ein Skalar. Typische skalare Größen sind
die Dichte ρ oder die Temperatur θ. Zur Darstellung von Kräften oder Verschiebungen
benötigt man entweder die Angabe einer Maßzahl und einer Richtung oder von drei Maßzahlen. Die entsprechenden physikalischen Größen haben vektoriellen Charakter. Bei der
Einführung des Spannungsbegriffs und der Verzerrung wurde deutlich, dass in diesen Fällen
neun Maßzahlen2 zur Festlegung der physikalischen Größe gegeben sein müssen. Genau wie
bei Vektoren sind die Zahlenwerte, die in dem zugehörigen Matrixschema angegeben werden, von der Wahl des konkreten Koordinatensystems abhängig. Damit die physikalischen
Größen unabhängig von einer willkürlichen Wahl des Koordinatensystems sind, müssen
sich die Koeffizienten nach ganz bestimmten Regeln ändern, wenn eine Koordinatentransformation durchgeführt wird. Dieses Transformationsverhalten unterscheidet Tensoren als
physikalisch motivierte Größen von Matrizen, deren Koeffizienten grundsätzlich beliebig
sein können.
In diesem Kapitel werden die Darstellungsmöglichkeiten für Vektoren und Tensoren diskutiert. Daraus ergeben sich Rechenregeln, mit denen unterschiedliche Darstellungen ineinander überführt werden können. Bereits im vorherigen Kapitel wurde deutlich, dass
verschiedene Darstellungen unterschiedliche Vorteile mitsichbringen. Die absolute Darstellung gestattet z.B. eine kompakte Darstellung der Ergebisse, die vor allem für Herleitungen
hilfreich ist, während eine Koeffizientendarstellung häufig unübersichtlich und umfangreich
wird, zur konkreten Berechnung aber unerläßlich ist.
2
Auf Grund der Symmetrie beschränkt sich die Anzahl der unabhängigen Koeffizienten häufig auf sechs.
36
fig_3_1
Kontinuumsmechanik WS 16/17
Abbildung 16: Darstellung von Vektoren durch eine Maßzahl und eine Richtung oder durch
drei Maßzahlen und drei linearunabhängige Vektoren
Vektoren lassen sich grundsätzlich auf zwei verschiedene Möglichkeiten darstellen. Als gerichtete Information kann ein Vektor durch eine gegebene Richtung e im Raum und einen
Skalierungsfaktur α dargestellt werden. Vektoren werden im folgenden durch fett gedruckte
Buchstaben dargestellt. Abbildung 16, links, zeigt die Richtung e und den Vektor a als
Vielfaches davon
a = α e.
(75)
eq_3_1
Üblicherweise wird die Richtung e dabei als Einheitsvektor mit der Länge 1 gewählt, so
dass die Maßzahl α die tatsächliche Länge des Vektors a angibt.
Alternativ kann der selbe Vektor gemäß Abbildung 16, rechts, durch drei Maßzahlen a1 , a2
und a3 sowie durch die drei linear unabhängigen Richtungen e1 , e2 und e3 dargestellt werden. Unser Anschauungsraum ist dabei durch drei räumliche Dimensionen bestimmt. Eine
Erweiterung auf einen n-dimensionalen Raum ist leicht möglich, wird aber an dieser Stelle nicht erfordert. Die Vektoraddition wird damit durch eine entsprechende geometrische
Interpretation eingeführt
a = a1 e1 + a2 e2 + a3 e3 .
(76)
Häufig werden die drei unabhängigen Richtungen ei gewählt und nicht weiter explizit
betrachtet. Dann können die Maßzahlen ai in einem Spalenvektor angegeben werden. Da in
dieser Darstellung die Basisinformation fehlt, soll an dieser Stelle auf ein Gleichheitszeichen
verzichtet werden. Die abkürzende Darstellung lautet dann
a1
a=
ˆ a2 .
(77)
a3
Die beiden Darstellungsarten implizieren die Multiplikation eines Vektors mit einem Skalar
als Streckung des geometrischen Vektors unter Bebehaltung seiner ursprünglichen Richtung und die Vektoraddition als ein geometrisches Aneinanderreihen von Vektoren bei der
eq_3_2
eq_3_3
α-Version vom 3.12.2016
37
Abbildung 17: Multiplikation mit einem Skalar und Vektoraddition fig_3_2
fig_3_2
Addition. Abbildung veranschaulich diese beiden grundlegenden Operationen. Die Vektoraddition und die Mulitplikation mit einem Skalar gestattet weiterhin die Einführung des
Begriffs der linearen Unabhängigkeit. Grundsätzlich gilt, dass n + 1 Vektoren a1 , . . ., an ,
b linear abhängig sind, wenn es Skalare αi 6= 0 existieren, so dass
n
X
α ai + b = 0
(78)
eq_3_4
i=1
gilt. Ansonsten sind sie linear unabhängig. Abbildung 18 zeigt ein Beispiel in der Ebene.
Im dreidimensionalen Raum können maximal drei Vektoren von einander linear unabängig
sein. Ein vierter Vektor kann immer durch eine Linearkombination der ersten drei Vektoren
ausgedrückt werden, sofern diese nicht in einer Ebene liegen. Drei linear unabhängige
Vektoren können damit als Basis zur Darstellung weiterer Vektoren gewähtl werden.
Für linear unabhängige Vektoren im dreidimensinalen Raum gibt es αi 6= 0, so dass
3
X
i=1
αi ai + b = 0
bzw.
b = −
3
X
αi ai .
(79)
eq_3_5
i=1
Zerlegt man im weiteren die Vektoren ai in ihre Länge |ai | und ihre Richtung ei , ai = |ai | ei ,
so kann der Vektor b folgendermaßen dargestellt werden
3
3
b1
X
X
b =
(− αi |ai | ei ) =:
bi e i =
ˆ b2 .
(80)
i=1
i=1
b3
Die Richtungen ei werden dabei als Basis zur Darstellung des Vektors b verwendet. Die
Faktoren bi sind die Koeffizienten von b. Das Produkt der Koeffizienten mit den entsprechenden Basisvektoren bezeichnet man als Komponenten. Der Vektor ist also die Summe
eq_3_6
38
Kontinuumsmechanik WS 16/17
Abbildung 18: Zur linearen Unabhängigkeit von Vektoren fig_3_3
α-Version vom 3.12.2016
39
seiner Komponenten, die Komponenten sind wiederum das Produkt der Koeffizienten mit
den Basisvektoren3 Eine Normierung der Basis ist nicht zwingend erforderlich. Weiterhin
verlangt die Darstellung 80 nicht, dass die Basisvektoren paarweise senkrecht stehen. Die
einzige Bedingung, die die Basis erfüllen muß, ist die lineare Unabhängigkeit der Basisvektoren.
Die häufig verwendete kartesische Basis, auf die sich die weiteren Ausführungen beziehen,
besteht aus drei normierten und paarweise senkrecht auf einander stehenden Basisvektoren.
Dann gilt
|ei | = 1, e1 ⊥ e2 , e3 , e2 ⊥ e3 , e1 , e3 ⊥ e1 , e2 .
(81)
eq_3_7
Für die folgenden Ausführungen bietet neben den Darstellungen 80 die Einsteinsche Summenkonvention eine elegante Möglichkeit, um Vektoren und andere tensorielle Größen darzustellen. Nach der Summenkonvention verzichtet man auf die explizite Darstellung des
Summenzeichens, so dass sich 80 zu
b =
3
X
bi ei = bi ei
(82)
eq_3_8
i=1
verkürzt. Über einen Index, der in einem Produkt doppelt auftritt, wird gemäß der Konvention summiert. Für Vektoroperationen im dreidimensionalen Raum ist die Summation
dabei immer über die Werte i = 1, 2, 3 auszuführen.
Neben der Multiplikation mit einem Skalar und der Vektoraddition ist die Skalarmultiplikation von zwei Vektoren, die als Ergebnis des Produktes eine Zahl liefert, eine wesentliche
Operation. Zeichen für die skalare Multiplikation von zwei Vektoren ist der Punkt, a · b.
Die Skalarmultiplikation wird ebenfalls geometrisch motiviert und entspricht der Projektion eines Vektor b auf einen Vektor a. Gemäß Abbildung 19 wird dazu der Winkel α
benötigt, der von den beiden Vektoren eingeschlossen ist. Dann gilt
a · b = b · a = |a| |b| cos α.
(83)
eq_3_9
(84)
eq_3_10
Wählt man den Vektor b = e als Einheitsvektor so folgt
a · e = |a| cos α
Insbesondere ergibt sich bei Wahl der Basisvektoren eines kartesischen Systems
a · e1 = |a| cos(a, e1 ) = a1 ,
a · e3 = |a| cos(a, e3 ) = a3
(85)
Der Cosinus der jeweiligen Ausdrücke wird dabei mit dem Winkel gebildet der von a
mit der jeweiligen Koordinatenachse eingeschlossen wird. Mit Bezug auf die geometrische
3
a · e2 = |a| cos(a, e2 ) = a2 ,
Häufig wird nicht zwischen Koeffizienten und Komponten unterschieden, da sich alle Betrachtungen
auf eine Basis beziehen, die einmal festgelegt und dann nicht mehr geändert wird.
eq_3_11
40
Kontinuumsmechanik WS 16/17
Abbildung 19: Zum Skalarprodukt von zwei Vektoren fig_3_4
Darstellung des Vektors a nach Abbildung 16, rechts, sind die jeweiligen Projektionen
gerade die Koeffizienten von a. Das Skalarprodukt eines Vektors mit einem Basisvektor
einer normierten Basis liefert also gerade den jeweiligen Koeffizienten des Vektors in der
entsprechenden Basisdarstellung.
Ein besonderer Fall liegt vor, wenn zwei Basisvektoren einer orthonormierten Basis multipliziert werden. In diesem Fall gilt
1 i=j
ei · ej =
= δij
(86)
0 i 6=
Da die Vektoren paarweise senkrecht aufeinander stehen, ist die jeweilige Projektion Null,
falls es sich um zwei verschiedene Vektoren i 6= j handelt. Durch die Normierung ist
der Betrag Eins, so dass die Projektion im Fall i = j den Wert Eins ergibt. Abkürzend
steht dafür das Kronecker-Symbol δij . Das Kronecker-Symbol kann als Darstellung einer
Einheitsmatrix
1 0 0
δij =
ˆ 0 1 0
(87)
0 0 1
eq_3_12
eq_3_13
angesehen werden.
Mit der Einführung des Kronecker-Symbols 86 und der Interpretation des Skalarproduktes als Projektion 85 ergibt sich für die Skalarmultiplikation von dem Vektor a mit dem
Basisvektor ei
a · ei =
aj e j
|{z}
·ei = aj (ej · ei ) = aj δij = ai .
(88)
Summenkonvention
Zur Darstelllung des Vektors a mit der Summenkonvention darf der Index i nicht verwandt
werden, da implizit über den Index festgelegt wird, über welche Faktoren der Gleichung zu
summieren ist. Mit der Wahl von i liegt der Basisvektor ei fest, damit die Summation in
eq_3_14
α-Version vom 3.12.2016
41
?? eindeutig ist, muss daher als Summationsindex ein anderer Index gewählt werden. Ein
Index darf als in einer Gleichung aus Gründen der Eindeutigkeit im Rahmen der Summenkonvention maximal zweimal auftreten. Im vorliegenden Fall ist j ein stummer Index, der
die Summation andeutet. Dieser Index darf beliebig umbenannt werden (ausser in i), ein
Indexpaar k anstelle von j impliziert an dieser Stelle die selbe Summation. Multipliziert
man die Summe aj ej mit dem Vektor ei aus, so entstehen in jedem der drei Summanden Ausdrücke der Form ej · ei , die nach 86 ein Kronecker-Symbold darstellen. Da dieses
Symbol nur dann den Wert Eins annimmt, wenn beide Indices gleich sind, werden nur die
Summanden ungleich Null, in denen i = j ist.
Überträgt man diesen Sachverhalt auf das Skalarprodukt der beiden beliebigen Vektoren
a und b, so entsteht
a · b = ai ei · bj ej = ai bj (ei · ej ) = ai bj δij = ai bi = a1 b1 + a2 b2 + a3 b3 .
(89)
eq_3_15
Die entsprechenden Summationen sind wieder farblich markiert. In jedem Summanden
werden die Skalarprodukte zwischen den Basisvektoren ausgeführt, womit wiederum das
Kronecker-Symbol entsteht. Eine der verbleibenden Summationen kann dann mit der Eigenschaft des Kronecker-Symbols ausgeführt werden, es muss also wiederum i = j sein, so
dass schließlich die einfache Summe bleibt, die hier nochmals ausgeschrieben ist.
Als nächste Größe werden Tensoren 2. Stufe eingeführt. Von ihrer Interpretation handelt
es sich bei Tensoren um lineare Abbildungen, die einen Vektor b auf einen anderen Vektor
a abbilden. Es gilt dann
a = T · b.
(90)
eq_3_16
Der Tensors selber kann über ein neues Produkt, das dyadische Produkt von zwei Vektoren
eingeführt werden,
T = c ⊗ d.
(91)
eq_3_17
Das Symbol ⊗ deutet dabei an, dass die beiden Vektoren c und d so verknüpft werden, dass
ein Tensor 2. Stufe entsteht. Die Eigenschaften des Tensors bzw. des dyadischen Produktes
ergeben sich aus der Rechenregel, die die Anwendung der linearen Abbildung 90 gestattet.
T · b = (c ⊗ d) · b
| {z }
= (d · b) c = a.
(92)
eq_3_18
Skalarprod.
Der Vektor a ist demnach parallel zu dem Vektor c, der um den Betrag des Produktes d · b
gestreckt oder gestaucht wird. Da in diesem Ausdruck der Vektor b linear auftritt und das
Ergebnis ein Vektor ist, handelt es sich bei dem Tensor T tatsächlich um die geforderte
lineare Abbildung von b auf a.
Definiert man die Eigenschaft der linearen Abbildung über das dyadische Produkt mit der
zugehörigen Rechenregel, dann kann man die folgende Koeffizientendarstellung ermitteln.
T = c ⊗ d = ci ei ⊗ dj ej = (ci dj ) ei ⊗ ej = Tij ei ⊗ ej .
(93)
eq_3_19
42
Kontinuumsmechanik WS 16/17
Mit Bezug auf die kartesiche Basis ei kann der Tensor genau wie ein Vektor als Summe
seiner Komponenten dargestellt werden. In diesem Fall impliziert die Summenkonvention
einen Doppelsumme über die Indices i und j, da beide im endgültigen Ausdruck jeweils
doppelt auftreten. Die Komponenten des Tensors bestehen wieder aus den Koeffizienten
Tij = ai bj und den Basistensoren ei ⊗ ej . Die dyadischen Produkte definieren also eine
Basis im neundimensionalen Raum der linearen Abbildungen. Die Koeffizienten des Tensors
können als Matrixschema
T11 T12 T13
Tij = T11 T12 T13 .
(94)
T11 T12 T13
eq_3_20
angegeben werden, wobei die Information bezüglich der gewählten Bais nicht enthalten ist.
Die lineare Abbildung kann nun für die Basisdarstellung des Tensors 93 ausgeführt werden.
Man erhält
a = T · b = Tij ei ⊗ ej · bk ek = (Tij bk ) ei ⊗ ej · ek = (Tij bk ) δjk ei .
(95)
eq_3_21
Nutzt man schließlich die Eigenschaft des Kroncker-Symbols4 aus, so reduziert sich der
letzte Ausdruck zu
a = T · b = (Tij bj ) ei = ai ei .
(96)
eq_3_22
Demnach sind die Koeffizienten des Vektors a über die Summen
ai = Tij bj
(97)
definert. Beschränkt man sich auf die Darstellung des Tensors als 3×-Matrix und des
Vektors als Spalte, so entspricht 97 dem üblichen Matrix-Vektor-Produkt im Sinn von
Zeile mal Spalte.
a1
T11 T12 T13
b1
T11 b1 + T12 b2 + T13 b3
a2 = T11 T12 T13 b2 = T21 b1 + T22 b2 + T23 b3 .
(98)
a3
T11 T12 T13
b3
T31 b1 + T32 b2 + T33 b3
Symmetrische und schiefsymmetrische Tensoren verfügen über die folgenden besonderen
Eigenschaften
A = AT bzw. B = −BT .
(99)
Für die jeweilige Koeffizientendarstellung
Tensor
A11
A12
A = Aij ei ⊗ ej =
ˆ
A13
gilt dementsprechend für einen symmetrischen
A12 A13
A22 A23 ⇒ Aij = Aji
(100)
A23 A33
4
Da an dieser Stelle die Eigenschaften der orthonormierten Basis explizit eingehen, muss man bei der
Verwendung krummlinieger und nicht-normierter Basis weitere Terme berücksichtigen, die die sogennante
Metrik enthalten.
eq_3_23
eq_3_24
eq_3_24a
eq_3_24b
α-Version vom 3.12.2016
43
und für einen schiefsymmetrischen Tensor
0
B12 B13
0
B23
B = Bij ei ⊗ ej =
ˆ −B12
−B13 −B23 0
⇒
Bij = Bji
(101)
eq_3_24c
Analog zur Einheitsmatrix definiert sich der Einheitstensor über die identische Abbildung
a = I·a
(102)
eq_3_25
Versieht man das Koeffizientenschema der Einheitsmatrix in Form des Kronecker-Symbols
mit der zugehörigen Basis, so hat der Einheitstensor die Darstellung
I = δij ei ⊗ ej .
(103)
eq_3_26
(104)
eq_3_27
(105)
eq_3_28
Ausführung einer der beiden implizierten Summationen liefert schließlich
I = ei ⊗ ei .
Wendet man I im Sinn einer linearen Abbildung auf einen Vektor a an, so folgt
I · a = ei ⊗ ei · aj ej = aj δij ei = ai ei = a,
womit die geforderte Eigenschaft gezeigt ist.
Einen Tensor, der sich nur aus Kombinationen von Basisvektoren darstellen läßt, bezeichnet man als Fundamentaltensor. Neben dem Einheitstensor 2. Stufe kann man weitere
Fundamentaltensoren höhrerer Stufe definieren. Der Fundamentaltensor 3. Stufe
3
E = εijk ei ⊗ ej ⊗ ek
(106)
wird auch als Ricci-Tensor oder Permutationstensor bezeichnet. Die Tensorbasis wird in
diesem Fall aus dem dyadischen Produkt von jeweils drei Basisvektoren gebildet. Das
Koeffizientenschema trägt dementsprechend drei Indices und stellt somit 3 × 3 × 3 = 27
unabhängige Koeffizienten dar.
1 /ijk/ = /123/, /231/, /312/
−1 /ijk/ = /213/, /132/, /321/
(107)
εijk =
0
sonst
ist das Permutationssymbol. Falls die Indices eine gerade Permutation der natürlichen
Reihenfolge darstellen, ist εijk = 1. Sind zwei Indices gegenüber der natürlichen Reihenfolge
vertauscht, so handelt es sich um eine ungerade Permutation und der Wert ist ε = −1.
Falls ein Indexwert mehrfach vorkommt, nimmt das Permutationssymbol den Wert Null
an.
eq_3_29
eq_3_30
44
Kontinuumsmechanik WS 16/17
Für den Fundamentaltensor 3. Stufe gelten formal die Rechenregeln, wie sie auch für Tensoren 2. Stufe gelten. Wendet man den Ricci-Tensor im Sinn einer linearen Abbildung auf
einen Vektor an, so folgt
3
E ·a = εijk ei ⊗ ej ⊗ ek · al el = εijk δkl al ei ⊗ ej = εijk ak ei ⊗ ej
(108)
Durch das Skalarprodukt zwischen den beiden Basisvektoren ek und el verbleibt als tensorielle Basis ei ⊗ ej . Das Ergebnis ist also ein Tensor 2. Stufe. Die Koeffizienten dieses
Tensors entstehen aus der Verknüpfung des Permutationssymbols mit den Koeffizienten
des Vektors a. Man berechnet
0
a3 −a2
a1
εijk ak =
ˆ −a3 0
(109)
a2 −a1 0
eq_3_31
eq_3_32
Durch die Eigenschafen des Permutatiossymbols werden die Diagonalelemente zu Null.
Zugeordnete Nebendiagonalelemente habe unterschiedichen Vorzeichen. Der Tensor, der
als Ergebis der linearen Abbildung entsteht, ist demnach schiefsymmetrisch.
Neben dieses einfachen Verjüngung kann man mit dem Permutationstensor auch eine zweifache Verfjüngung durchführen, in dem er auf einen Tensor 2. Stufe angewandt wird. In
diesem Fall gilt
3
E : A = εijk ei ⊗ ej ⊗ ek : Alm el ⊗ em
(110)
eq_3_33
Der Doppelpunkt in diesem Ausdruck deutet an, dass zwei Skalarprodukte zwischen den
Basisvektoren auszuführen sind. In diesem Fall werden die beiden letzten Basisvektoren
des Permutationstensors mit den beiden Basisvektoren des Tensors 2. Stufe multipliziert,
so dass schließlich nur das erste Basissystem des Permutationstensors erhalten bleibt. Das
Resultat dieser Abbildung ist also ein Vektor. Die Auswertung liefert
3
E : A = εijk δjl δkm Alm ei = εijk Ajk ei .
Die Auswertung von 111 lieft mit den Eigenschafen des Permutationssymbols
A
−
A
23
32
3
ˆ A31 − A13 .
E : A=
A12 − A21
(111)
eq_3_34
(112)
eq_3_35
Falls A symmetrisch ist, so ist das zweifach verjüngende Produkt mit dem Ricci-Tensor
der Nullvektor. Im Falle eines schiefsymmetrischen Tensors ist das Resultat der von Null
verschiedene axiale Vektor, der der schiefsymmetrischen Tensor zugeordnet werden kann
A
a=
1 3
T
E: A .
2
(113)
eq_3_35a
α-Version vom 3.12.2016
45
Weiterhin kann das Produkt 111 genutzt werden, um das Vektor- oder Kreuzprodukt von
Vektoren im Rahmen des Tensorkalküls darzustellen. Dazu wird der Tensor A über das
dyadisch Produkt der beiden Vektoren a und b definiert.
a
b
−
a
b
2
3
3
2
3
a × b := E : (a ⊗ b) = εijk aj bk ej = a3 b1 − a1 b3 .
(114)
a1 b 2 − a2 b 1
eq_3_36
In den Anwendungen tauchen häufig noch Tensoren 4. Stufe auf. Diese sind definiert als
lineare Abbildungen von Tensoren 2. Stufe auf Tensoren 2. Stufe.
4
A = C : B = Cijkl ei ⊗ ej ⊗ ek ⊗ el : Bmn em ⊗ en =
(115)
eq_3_37
Ein vierstufiger Tensor besitzt 3 × 3 × 3 × 3 × 3 = 81 unabhängige Komponenten. Jede
der neuen Komponenten des Tensors A entsteht bei der Auswertung von 115 aus einer
Linearkombination der neun Komponenten von B. Die Koeffizienten berechnen sich jeweils
aus der Doppelsumme
Aij = Cijkl Bkl .
(116)
eq_3_38
Cijkl Bmn δkm δln ei ⊗ ej = Cijkl Bkl ei ⊗ ej .
Es gibt drei Fundamentaltensoren 4. Stufe, die sich mittels des Kronecker-Symbols folgendermaßen angeben lassen
4
I
= δij δkl ei ⊗ ej ⊗ ek ⊗ el = ei ⊗ ei ⊗ ek ⊗ ek ,
4
I 13 = δkj δil ei ⊗ ej ⊗ ek ⊗ el = ei ⊗ ej ⊗ ej ⊗ ei ,
(117)
eq_3_39
4
I 23 = δik δjl ei ⊗ ej ⊗ ek ⊗ el = ei ⊗ ej ⊗ ei ⊗ ej .
Die hochgestellten und unterschrichenen Indices geben dabei an, welche Zuordnungen der
Koeffizienten und der Basiselemente vertauscht ist. Die Eigenschaften dieser Fundmentaltensoren werden deutlich, wenn man sie im Sinn der linearen Abbildung auf einen Tensor
2. Stufe anwendet.
• Spurbildender Tensor
4
I : A = ei ⊗ ei ⊗ ej ⊗ ej : Akl ek ⊗ el = Akl δjk δjl , ei ⊗ ei = Ajj ei ⊗ ei .
(118)
eq_3_40
(119)
eq_3_41
: A = ei ⊗ ej ⊗ ej ⊗ ei : Akl ek ⊗ el = Akl δjk δil , ei ⊗ ej = Aji ei ⊗ ej . (120)
eq_3_42
4
I : A = (tr A) I.
• Transponierender Tensor
4
I
13
4
I
13
: A = AT .
(121)
eq_3_43
46
fig_3_5
Kontinuumsmechanik WS 16/17
Abbildung 20: Skalarfeld als Fläche über der Koordinatenebene im zweidimensionalen Fall
• Identischätstensor 4. Stufe
4
I
23
: A = ei ⊗ ej ⊗ ei ⊗ ej : Akl ek ⊗ el = Akl δik δjl ei ⊗ ej = Aij ei ⊗ ej . (122)
4
I
3.2
23
: A = A.
(123)
eq_3_44
eq_3_45
Tensoranalysis
In der Kontinuumsmechanik werder physikalische Größen als Felder betrachtet. Ihre Werte sind von der Position x abhängig, da sie für alle materiellen Punkte eines Körpers
unterschiedliche Werte annehmen können, z.B. kann die Temperatur innerhalb es Körpers
inhomogen verteilt sein. Je nach Art der Feldgröße unterscheidet man skalarwertige, vektorund tensorwertige Felder
α = α(x), a = a(x) und A(x).
(124)
Im zweidimensionalen Fall kann ein Skalarfeld als Fläche wie in Abbildung 20 über der
Koordinateneben x1 -x2 dargestellt werden.
Abbildung 21 zeigt Schnitte paralle zu den Achsen, einmal für Werte x2 =konst. und
einmal für x1 =konst. Die Steigung der Funktion in den jweiligen Schnitten kann durch
eq_3_46
α-Version vom 3.12.2016
fig_3_6
47
Abbildung 21: Partielle Ableitung als Steigung in Richtung der jeweiligen Koordinatenachsen
die Ableitungen ermittelt werden. Die partiellen Ableitungen
∂α(x1 , x2 = konst.)
=
∂x1
∂α(x1 , = konst., x2 )
=
∂x2
α(x1 + ∆x1 , x2 ) − α(x1 , x2 ) lim
,
∆x1 →0
∆x1
x2 = konst.
α(x1 , x2 + ∆x2 ) − α(x1 , x2 ) lim
∆x2 →0
∆x2
x1 = konst.
(125)
eq_3_47
werden aus den Grenzwerten der Sekantensteigungen ermittelt. Die partielle Ableitung
deutet dabei an, dass die beiden Variablen x1 und x2 unabhängig sind und bei der Ableitungsberechnung nur jeweils eine variiert wird. Bei mehr als zwei Variablen sind die
Überlegungen entsprechend zu verallgemeinern.
Mit den partiellen Ableitungen kann schließlich der Gradientenoperator definiert werden
∂α/∂x1
∂α(x)
∂α
grad α(x) =
=
ei =
ˆ ∂α/∂x2 .
(126)
∂x
∂xi
∂α/∂x3
Der Gradient eines Skalarfeldes ist demnach ein Vektor. Er zeigt in die Richtung des steilsten Anstiegs des Feldes. Die entsprechenden Basisvektor werden hinter dem Ableitungsoperator eingefügt. Die Richtungsableitung gibt an, wie groß die Steigung in Richtung n ist
und berechnet sich aus dem Gradienten und der Richtung n über ein Skalarprodukt. Um
Schreibaufwand zu sparen, wird die partielle Ableitung nach den Koordinatenrichtungen
xi häufig abkürzend als
∂α
=: α,i
(127)
∂xi
eq_3_48
eq_3_49
48
Kontinuumsmechanik WS 16/17
druch ein Komma und den entsprechenden Richtungsindex gekennzeichnet.
Bei der Gradientenberechnung eines Vektorfeldes a können alle drei Koeffizienten abgeleitet
werden. Es ergeben sich bei drei Koordinatenrichtungen wieder neun Möglichkeiten, die in
einem Tensor 2. Stufe zusammengefasst werden können
grad a(x) =
∂ai
∂a(x)
=
ei ⊗ ej = ai,j ei ⊗ ej .
∂x
∂xj
(128)
eq_3_50
Die Basis des Ortsvektors wird wiederum hinter dem Ausdruck angefügt. Damit ein Tensor
entsteht, müssen Basisvektoren des Vektorfeldes mit denen des Ortsvektor tensoriell multipliziert werden. Da die Basis ei konstant ist5 , betrifft bei einem kartesichen Basissystem
die Ableitungsbildung nur die Koeffizienten des Vektorfeldes und nicht die Basis.
Damit liegt die Bildungsregel für die Gradientenbildung fest. Folgt man dem skizzierten
Schema, so ist der Gradient eines Tensorfelds A als
∂Aij
∂A
=
ei ⊗ ej ⊗ ek = Aij,k ei ⊗ ej ⊗ ek
(129)
∂x
∂xk
definiert und ein Tensor 3. Stufe. Fasst man einen Skalar als Tensor 0. Stufe und einen
Vektor als Tensor 1. Stufe auf, so erhöht die Gradientenbildung die tensorielle Stufe um
jeweils eins.
grad A(x) =
eq_3_51
Die Divergenz ist ein weiterer Differentialoperator, die die partiellen Ableitungen der Feldgröße nach den Koeffizienten des Ortsvektors beinhaltet. Der Zusammenhang mit dem
Gradienten ergibt sich durch eine doppelte Verjüngung des Gradienten mit dem zweistufigen Einheitstensor. Für die Divergenz eines Vektorfeldes folgt dann
div a = grad a : I = ai,j ei ⊗ ej : ek ⊗ ek = ai,j δik δjk = aii .
(130)
eq_3_52
Schreibt man die Summe in 130 aus, so ergibt sich
∂a1
∂a2
∂a3
+
+
.
(131)
∂x1
∂x2
∂x3
Analog berechnet man aus der zweifachen Verjüngung des dreistufigen Gradienten einer
Tensorfunktion mit dem zweistufigen Identitätstensor
div a =
div A = grad A : I = Aij,k ei ⊗ ej ⊗ ek : el ⊗ el = Aij,j ei .
(132)
eq_3_53
eq_3_54
Die Divergenzbildung verringert also die tensorielle Stufe um eins.
Die Rotation eines Vektor- und eines Tensorfeldes lässt sich durch den Gradienten und den
dreiststufigen Permutations- oder Riccitensor darstellen. Es gilt mit den oben gezeigten
Rechenregeln
3
rota = E : (grad a)T
bzw.
3
rotA = E : (grad A)13 .
(133)
5
Falls keine kartesische Basis verwendet wird, sondern die Bais ortsabhängig ist, muss bei der Bildung
der Ableitungen diese Abhängigkeit ebenfalls berücksichtigt werden. Dabei entstehen dann die Christoffelsymbole, die genau diese Abhängigkeiten widerspiegeln.
eq_3_55
α-Version vom 3.12.2016
49
Abbildung 22: Materieller Körper in Referenz- und Momentankonfiguration fig4_1
4
4.1
Große Deformationen
Bewegungsfunktion
Bisher wurde vorausgesetzt, dass sich der betrachtete materielle Körper B nur geringfgig
verschiebt und dabei kleine Deformationen erfährt. Für viele technische Anwendungen
sind diese Annahmen gerecht fertig, wenn es darum geht, eine Versagensgrenze eines technischen Systems zu ermitteln. Ausser diesen Betrachtungen, die den zulässigen Betriebsbereich technischer Systeme einschränken, ist man aber zunehmend auch an Situationen
interessiert, bei denen große Deformationen auftreten können. Typische Fälle sind Umformvorgänge, bei denen das Bauteil während der Herstellung stark deformiert wird, oder
Systeme aus weichen Werkstoffen, etwa aus Polymeren, die auch im zulässigen Betriebsbereich große Verformungen erfahren. Die vereinfachenden Annahmen, die im Kapitel 2
gemacht wurden, treffen dann nicht mehr zu. Die Kinematik muss in diesem Fall exakt abgebildet werden. Auch bei der Formulierung der Bilanzgleichungen muss dann klar zwischen
der Ausgangs- oder Referenzkonfiguration und der Momentankonfiguration im deformierten Zustand unterschieden werden.
Die Bewegungs- oder Plazierungsfunktion χ wird für jeden materiellen Punkt des Körpers
eingeführt. Sie gibt an, wie sich der materielle Punkt bewegt. Auf Grund des feldlichen
Charakters der Bewegungsfunktion ist der Begriff der Deformation automatisch enthalten.
Zum Zeitpunkt t0 (o. b. d. A. t0 = 0) befindet sich der Körper B in der Referenzkonfiguration. Durch die Wirkung der angreifenden Kräfte, z. B. der Oberflächenspannung t bewegt
sich der Körper zum Zeitpunkt t > t0 in die Momentankonfiguration. Die materiellen Punkte X, Y des Körpers legen dabei eine Bahn zurück, die durch die Bewegungsfunktion χ
beschrieben wird. Die Symbole X, Y werden zur Unterscheidung verschiedener materieller
50
Kontinuumsmechanik WS 16/17
Punkte des Körpers eingeführt und können als Namen“ der Punkte betrachtet werden.
”
Die Lage des materiellen Punktes X in der Referenzkonfiguration wird durch den Vektor X gekennzeichnet, die Lage in der Momentankonfiguration durch den Vektor x. Für
die mathematische Modellierung wird der materielle Punkt X mit seinem Ortsvektor X
zum Zeitpunkt t0 ein-eindeutig identifiziert, d. h. ein materieller Punkt nimmt genau einen
mathematischen Punkt in der Referenzkonfiguration des Körpers ein und an einem mathematischen Punkt liegt genau ein materieller Punkt.
Mit der Bewegungsfunktion gilt dann
x = χ(X, t),
(134)
kinem10
d. h. die Bewegungsfunktion χ bildet den Ortsvektor der Referenzkonfiguration in den
Ortsvektor der Momentankonfiguration ab. Analog gilt für einen zweiten materiellen Punkt
Y
y = χ(Y, t).
(135)
kinem20
Zum Zeitpunkt t0 muss die Bewegungsfunktion die Bedingung
X = χ(X, t0 )
(136)
kinem30
erfüllen, damit die Bewegung von X aus seiner Anfangsposition X heraus startet. Da ein
Raumpunkt x nur von einem materiellen Punkt X besetzt werden kann und der materielle
Punkt aus einer eindeutig definierten Referenzkonfiguration gestartet ist, ist die Bewegungsfunktion eindeutig und eindeutig invertierbar, also ein-eindeutig. Es existiert als eine
inverse Bewegungsfunktion
X = χ−1 (x, t)
(137)
kinem40
mit deren Hilfe man ermitteln kann, von welcher Position aus der materielle Punkt X, der
zur Zeit t an der räumlichen Position x ist, seine Bewegung begonnen hat.
In der Kontinuumsmechanik unterscheidet man zwei mögliche Darstellungen, die auf unterschiedlichen Parameterisierungen der Felder fußen:
Lagrangesche (materielle) Darstellung
Der materielle Punkt X wird durch den Ortsvektor X der Referenzkonfiguration
identifiziert. Die Bewegungsfunktion
x = χ(X, t)
(138)
liefert die Antwort auf die Frage: Wo befindet sich der materielle Punkt X,
der zum Anfangszeitpunkt t0 am Raumpunkt X war, zum Zeitpunkt t? In der
Lagrangeschen Darstellungen werden die Felder in Abhängigkeit von X parameterisiert. Die Anwendung findet üblicherweise in der Festkörpermechanik
statt.
kinem50
α-Version vom 3.12.2016
51
Eulersche (räumliche) Darstellung
Der materielle Punkt X wird durch den Ortsvektor x der Momentankonfiguration identifiziert. Die inverse Bewegungsfunktion
X = χ−1 (x, t)
(139)
kinem60
liefert die Antwort auf die Frage:Wo war der materielle Punkt X, der zur
Zeit t den Raumpunkt x einnimmt, zum Anfangszeitpunkt t0 ? Die feldlichen
Grössen werden in Abhängigkeit von x parameterisiert. Die Anwendung ist in
der Strömungsmechanik üblich, da es hier keine ausgezeichnet Referenzkonfiguration gibt.
Aus mathematischer Sicht ist die Bewegungsfunktion ein-eindeutig (eindeutig und eindeutig invertierbar), wenn die Jacobi-Determinante J immer ungleich Null ist, d. h.
J = det
∂x
6= 0
∂X
(140)
kinem70
Eine weitere physikalische Interpretation der Beziehung 140 wird noch gegeben.
Neben dem materiellen Körper und den materiellen Punkten, die bereits im Kapitel 2
eingeführ wurden, kann man auch materielle Linien, materielle Flächen und materielle
Volumen definieren. Eine materielle Linie ist dabei definiert als Verbindungslinie infinitesimal benachbarter materieller Punkte. Eine materielle Linie wird immer von den selben
materiellen Punkten gebildet und bewegt sich mit diesen materiellen Punkten mit.
Ein materielles Linienelement ist der Verbindungsvektor zwischen zwei infinitesimal benachbarten materiellen Punkten X und Y , die auf einer materiellen Linie liegen. Betrachtet man den Verbindungsvektor der materiellen Punkte in der Referenzkonfiguration
∆X = Y − X bzw. in der Momentankonfiguration ∆x = y − x, so kann man die Punkte im Grenzwert gegeneinander wandern lassen. Die Differenzvektoren ∆X und ∆x gehen
dann in die materiellen Linienelemente dX bzw. dX über, die differentialgeometrisch als
Tangentenvektoren an die materielle Linie interpretierbar sind.
4.2
Geschwindigkeit und Beschleunigung
Geanu wie für den Massepunkte ergeben sich Geschwindigkeit und Beschleunigung aus der
Ableitung der Position eines materiellen Punktes nach der Zeit, d. h. aus Ableitung der
Bewegungsfunktion:
dx(X, t)
,
ẋ(X, t) =
dt
(141)
d2 x(X, t)
ẍ(X, t) =
.
dt
kinem360
52
fig4_2
Kontinuumsmechanik WS 16/17
Abbildung 23: Materielle Linie und materielles Linienelement in der Referenzkonfiguration
Die Ableitungen, die in 141 gebildet werden, sind im Sinn totaler Zeitableitungen zu verstehen. Der Vektor X, der die Position des betrachteten materiellen Punktes in der Referenzkonfiguration angibt und so den materiellen Punkt identifiziert, ist dabei konstant. In 141
stellt ẋ die Geschwindigkeit und ẍ Beschleunigung des materiellen Punktes dar, der zur
Zeit t = t0 am Ort X war und sich zur aktuellen Zeit t am Ort x befindet. Diese Darstellung, die sich konzeptionell an der Definition der Geschwindigkeit und der Beschleunigung
orientiert, entspricht der materiellen oder Lagrangesche Darstellung.
Unter Verwendung der inversen Bewegungsfunktion 139 kann eine Umparameterisierung
von 141 erfolgen. Man erhält man dann die räumliche oder Eulersche Darstellung des
Geschwindigkeits- bzw. des Beschleunigungsfelds
v = ẋ(χ−1 (x, t) t) = v(x, t),
(142)
−1
a = ẍ(χ (x, t) t) = a(x, t).
Die Gleichungen 142 geben die Geschwindigkeit und Beschleunigung des materiellen Punktes X an, der sich zur Zeit t am Ort x aufhält. Der Ursprungsort X dieses materiellen
Punktes tritt in der Beziehung nicht mehr explizit auf auf. Bei der Auswertung von 142
muss man allerdings beachten, dass sich zu zwei unterschiedlichen Zeiten t1 und t2 zwei
unterschiedliche materielle Punkte X bzw. Y am betrachteten Raumpunkt x aufhalten.
Durch Auswertung der inversen Bewegungsfunktion kann die Anfangsposition des jeweiligen materiellen Punktes ermittelt werden.
Die materielle Beschleunigung a(x, t), d. h. die Beschleunigung des materiellen Punktes, der zur Zeit t am Ort x ist, kann auch direkt aus der räumlichen Darstellung des
Geschwindigkeitsfeldes berechnet werden. Dazu ist die totale zeitliche Ableitung des Geschwindigkeitsfeldes v(x, t) zu bilden. Sie berücksichtigt, dass der materielle Punkt seinen
kinem370
α-Version vom 3.12.2016
53
Abbildung 24: Zur Eulerschen Darstellung der Bewegung fig4_3
Aufenthaltsort durch die Bewegung ändert. Gedanklich fasst
im Sinn der Bewegungsfunktion als veränderlich auf, sofern
trachteten materiellen Punktes folgt. Damit ergibt sich
∂v dv(x(X, t), t)
+
=
a(x, t) = v̇(x, t) =
dt
∂t x = konst.
man dazu den Ortsvektor x
man der Bewegung des be
∂v dx
·
∂x t = konst. dt
(143)
durch die Anwendung der Kettenregel der Differentiation. Man muss berücksichtigen, dass
x selbst eine implizite Funktion von X (stellvertretend für den betrachteten Partikel) und
von t ist. In Gl. 143 ist hervorgehoben, dass die partiellen Ableitungen im Gegensatz zur
totalen Ableitung jeweils bei festgehaltenem anderen Argument gebildet werden. Unter
Beachtung der Definiton der Geschwindigkeit nach 1421 und der Definiton des räumlichen
Gradientenoperators
∂(. . .)
∂(. . .)
=
ei
(144)
grad(. . .) =
∂x
∂xi
kinem380
kinem390
lautet Gl.143
a(x, t) =
∂v(x, t)
+ grad v(x, t) · v(x, t).
∂t
(145)
Der erste Summand ∂v/∂t wird als lokaler Anteil der materiellen Beschleunigung bezeichnet, da er bei festgehaltenem Raumpunkt x = konst. gebildet wird, der zweite Summand
grad v · v heißt konvektiver Anteil. Er beschreibt den Einfluss der inhomogenen räumlichen Geschwindigkeitsverteilung auf die Beschleunigung des materiellen Punktes. Allgemein kann die folgende Interpretation der materiellen Beschleunigung in der räumlichen
oder Eulerschen Darstellung gegeben werden: Die materielle Beschleunigung in räumlicher
Darstellung stellt die Beschleunigung dar, die ein Beobachter erfährt, der sich mit dem
materiellen Punkt bewegt, der zur Zeit t gerade am betrachteten Raumpunkt x ist.
kinem400
54
4.3
Kontinuumsmechanik WS 16/17
Materielle Zeitableitung
Das am Beispiel der materiellen Beschleunigung entwickelte Konzept der materiellen Zeitableitung läßt sich auf beliebige Feldfunktionen übertragen. Dabei sind Feldfunktionen
f (x, t) definiert als Funktionen des Orts x und der Zeit t, d. h. die Parameterisierung erfolgt im Sinn der Eulerschen oder der räumlichen Darstellung. Die zeitlichen Änderungen
der Feldfunktionen, die gesucht werden, sind jedoch Änderungen, die sich für die bewegte
Materie einstellen. Das führt zu der folgenden Definition: Die materielle Zeitableitung einer Feldfunktion f (x, t) stellt dann die zeitliche Änderung von f dar, die ein Beobachter
messen würde, der sich mit dem materiellen Punkt bewegt, der zur Zeit t gerade am Ort
x ist. Mathematisch entspricht die materielle Zeitableitung der totalen Zeitableitung.
Die materielle Zeitableitgung
df (x, t)
,
(146)
f˙(x, t) =
dt
berücksichtigt, dass der materielle Punkt während der Beobachtung seinen Aufenthaltsort
ändert, d. h. man beachtet die implizite Abhängigkeit x = x(X, t) bei der Bildung der
totalen Zeitableitung. Dann folgt
∂f
f˙(x, t) =
+ grad f · v.
∂t
(147)
kinem420 Der lokale Anteil ∂f /∂t beschreibt wiederum die Änderung von f an dem festgehaltenen Ort x, der konvektive Anteil grad f · v beschreibt die Änderung von f infolge
der Bewegung des materiellen Punktes durch das räumlich inhomogene Feld.
Ein Vorgang heißt stationär, wenn die lokale Zeitableitung identisch Null ist. Ein Beobachter stellt also an einem Raumpunkt immer den selben Zustand fest, obwohl zu unterschiedlichen Zeiten verschiedene materielle Punkte an diesem Raumpunkt anzutreffen sind. Der
Zustand heißt materiell konstant, wenn die materielle Zeitableitung identisch Null ist. In
diesem Fall ändern sich die Zustandsgrößen eines materiellen Punktes nicht, auch wenn er
sich durch den Raum bewegt. Ein Feld heißt homogen, wenn der Gradient identisch Null
ist.
In einem stationären Prozeß sind die Werte von f an einem festen Raumpunkt x immer
gleich, es gilt ∂f /∂t = 0. Wenn das Feld inhomogen ist, d. h. grad f 6= 0, dann ist
die materielle Zeitableitung in diesem Fall trotzdem von Null verschieden, da sich die
materiellen Punkte von einem Ort zum anderen bewegen und dabei die räumliche Änderung
grad f mit der Geschwindigkeit v verspüren.
4.4
Transport materieller Linien, Flächen, Volumen
Die materielle Linie wurde bereits als Verbindungslinie infinitesimal benachbarter materieller Punkte eingeführt. Die materielle Linie haftet an den materiellen Punkten, aus denen
kinem410
α-Version vom 3.12.2016
55
Abbildung 25: Bewegung materieller Linienelemente fig4_4
sie gebildet wird und bewegt sich mit diesen Punkten mit. Sie wird also zu allen Zeitpunkten aus den selben materiellen Punkten gebildet. Ein materielles Linienelement ist der
Verbindungsvektor zwischen zwei infinitesimal benachbarten materiellen Punkten. Dies ist
interpretierbar als Tangentenvektor an die materielle Linie, die durch die beiden Punkte
verläuft. Genau wie die gesamte materielle Linie bewegt sich ein materielles Linienelement
mit dem Körper mit. Wenn man in der Lage ist, ein materielles Linienelement während der
Bewegung des Körpers zu verfolgen, kann man diese Information nutzen, um Deformation
des materiellen Körpers zu bestimmen.
Wenn ein materielles Linienelement dX in der Referenzkonfiguration betrachtet wird, kann
man mit Hilfe der Bewegungsfunktion sein Bild dX in der aktuellen Konfiguration finden.
Der Differenzvektor zwischen den benachbarten Punkten X und Y ist in der Referenzkonfiguration gegeben als
∆X = Y − X.
(148)
kinem590
In der Momentankonfiguration ist der Verbindungsvektor zwischen den beiden betrachteten
Punkten durch
∆x = y − x = χ(Y, t) − χ(X, t)
(149)
kinem600
gegeben und kann mit der Bewegungsfunktion χ bestimmt werden. Geht man davon aus,
dass die Punkte in direkter Nachbarschaft liegen, so kann man die Bewegungsfunktion in
eine Taylor-Reihe eintwickeln. Für die aktuelle Position des materiellen Punkts Y folgt
damit
∂χ(X, t)
χ(Y, t) = χ(X, t) +
· (Y − X) + höhere Terme.
(150)
∂X
Unter Vernachlässigung der höheren Terme der Taylor-Reihe in dem Differenzvektor ∆X
kann man die Gleichungen 148, 149 und 150 kombinieren und erhält
∆x =
∂χ(X, t)
· ∆X.
∂X
(151)
kinem610
kinem620
56
Kontinuumsmechanik WS 16/17
Für direkt benachbarte materielle Punkte gehen die Differenzvektoren ∆X und ∆x in die
entsprechenden materiellen Linienelemente dX und dX über, wenn man den Abstand der
beiden Punkte als infinitesimal klein annimmt. Im Grenzwert folgt daher
dX = Grad χ(X, t) · dX = F · dX.
(152)
kinem630
(153)
kinem640
Diese Gleichung definiert den Deformationsgradienten
F = Grad χ(X, t) =
∂x
.
∂X
Der Deformationsgradient F bildet also die Linienelemente dX der Referenzkonfiguration
auf die Linienelemente dX der Momentankonfiguration ab. In 153 wird der Werr der Bewegungsfunktion x so behandelt wie die Bewegungsfunktion χ selbst. Diese vereinfachende Darstellung ist mathematisch nicht korrekt, da nur die Funktion aber nicht ihr Wert
abgeleitet werden kann. Allerdings besteht in dem meisten Situationen keine Verwechselungsgefahr und es ist klar, was an der entsprechenden Stelle mit der Ableitung gemeint
ist, so dass sich die vereinfachte Form 1532 an vielen Stellen in der Literatur eingebürgert
hat.
χ Der in Gl. 153 auftretende materielle Gradientenoperator entspricht der partiellen Ableitung nach den Ortsvektoren der Referenzkonfiguration
∂(. . .)
∂X1
∂(. . .)
∂(. . .)
∂(. . .)
ei =
ˆ
=
Grad(. . .) =
∂X2
∂X
∂Xi
∂(. . .)
∂X3
(154)
kinem640a
In karesischen Koordinaten ergibt sich die folgende Darstellung des Deformationsgradienten
∂x1 (X1 , X2 , X3 , t)
∂X1
∂x2 (X2 , X2 , X3 , t)
F=
ˆ
∂X1
∂x (X , X , X , t)
3
1
2
3
∂X1
∂x1 (X1 , X2 , X3 , t)
∂X2
∂x2 (X2 , X2 , X3 , t)
∂X2
∂x3 (X1 , X2 , X3 , t)
∂X2
∂x1 (X1 , X2 , X3 , t)
∂X3
∂x2 (X3 , X2 , X3 , t)
.
∂X3
∂x3 (X1 , X2 , X3 , t)
∂X3
(155)
Analog kann man eine Beziehung für die materiellen Volumenelementen ermitteln. Diese
sind durch das Spatprodukt von jeweils drei nicht-kolinearen materiellen Linienelementen
definiert
dV = (dX1 × dX2 ) · dX3 , dv = (dx1 × dx2 ) · dx3 .
(156)
kinem640b
kinem730
α-Version vom 3.12.2016
57
Unter Ausnutzung des Transporttheorems 152 schreibt man
dv = (F · dX1 ) × (F · X2 ) · (F · dX3 ).
(157)
kinem740
Mit der Berechnungsmöglichkeit für die Determinant gilt für Tensoren A und für beliebige
Vektoren a, b und c
((A · a) × (A · b)) · (A · c) = (det A)(a × b) · c.
(158)
Wählt man A = F und identifiziert die Vektoren a, b und c mit drei nicht-kolinearen
materiellen Linienelementen, so kann Gl. 158 umformuliert werden zu
(F · dX1 )×(F · dX2 ) · (F · dX3 )
(dx1 × dx2 ) · dx3
det F =
=
.
(159)
(dX1 × dX2 ) · dX3
(dX1 × dX2 ) · dX3
kinem740a
kinem750
Es folgt schließlich mit Gleichung 156
dv = (det F) dV.
(160)
kinem760
Ein materielles Flächenelement ergibt sich aus dem Kreuzprodukt von zwei nicht-parallelen
materiellen Linienelementen dX1 und dX2 bzw. dX1 und dX2 . In der Referenzkonfiguration
gilt
dA = dX1 × dX2
(161)
kinem650
und in der Momentankonfiguration
da = dX1 × dX2 .
(162)
kinem660
Mit der Vorschrift für den Transport von Linienelementen 152 kann die Beziehung 162
durch die Elemente der Referenzkonfiguration ausgedrückt werden
da = (F · dX1 ) × (F · dX2 )
(163)
kinem670
Um den Zusammenhang zwischen den Flächenelementen dA der Referenz- und da der
Momentankonfiguration herzuleiten, betrachtet man die Gleichung 158 für fest gewählte
Vektoren a und b, für beliebige Vektoren c, die nicht in der Ebene von a und b liegen, und
für beliebige Tensoren A. Mit der Beliebigkeit von c folgt dann
AT · ((A · a) × (A · b)) = (det A)(a × b).
(164)
kinem720a
(165)
kinem720
Mit der Identifikation der Vektoren gemäß 161 und 163 ergibt sich
da = (det F) FT −1 dA.
58
Kontinuumsmechanik WS 16/17
Da es sich bei den Größen dT A und dT A um die gerichteten Flächenelemente dA N und
da n handelt, kann 165 auch als Transporttheorem für die Normalenvektoren N und n auf
materiellen Flächen interpretiert werden.
Zusammenfassung
Die folgenden kinematischen Zusammenhänge ergeben sich zwischen materiellen Linien-,
Flächen- und Volumenelementen der Referenz- und der Momentankonfiguration:
dX
F · dX,
=
dT A = (det F) FT −1 · dT A,
dV
=
(166)
kinem770
(det F) dV.
Diese Größen bilden die Basis zur Definition von Verzerrungstensoren im Rahmen einer
Theorie großer Deformationen.
4.5
Deformations- und Verzerrungstensoren
Der Deformationsgradient F(X, t) ist zur Beschreibung der Deformation eines materiellen
Körpers nicht geeignet, da der Deformationsgradiente auch für eine Starrkörperbewegung
Werte ungleich der Identität annimmt. Materielle Linienelemente verändern per Definition bei einer Starrkörperbewegung ihren Abstand nicht, aber die Orientierung ändert sich
durch die Rotation. Um Deformationen auf Grund der Bewegung von den Starrkörperanteilen zu trennen, werden die Längenänderungen materieller Linienelemente betrachtet.
Man nutzt dazu das Quadrat der Länge eines Linienelementes in der Referenz- und der
Momentankonfiguration als
dS 2 = dX · dX,
ds2 = dx · dx.
(167)
kinem920
Die beiden Größen dS und ds lassen sich durch Anwendung des Transporttheorems für
Linienelemente 1661 ineinander überführen. Für das Quadrat der Länge in der aktuellen
Konfiguration gilt
ds2 = dX · dX = (F · dX) · (F · dX) = dX · (FT · F) · dX =: dX · C · dX.
(168)
kinem930
Dabei wird das Quadrat ds der Linienelemente der Momentankonfiguration durch die Linienelemente der Referenzkonfiguration ausgedrückt. Der Ausdruck 168 definiert den den
rechten Cauchy-Green-Deformationstensor C als
C := FT · F
(169)
kinem940
(170)
kinem950
Der rechte Cauchy-Green-Deformationstensor ist symmetrisch
CT = (F · FT )T = FT · (FT )T = FT · F = C.
α-Version vom 3.12.2016
59
Da C in der Gleichung 168 auf Linienelemente der Referenzkonfiguration angewandt wird,
bezieht sich C auf die Geometrie der Referenzkonfiguration. d. h. die Bezugsgröße für die
Beschreibung der Deformation sind die Ausgangslinienelemente dX.
Drückt man analog das Quadrat der Linienelemente der Referenzkonfiguration durch die
Linienelemente der Momentankonfiguration aus, so entsteht der linke Cauchy-Green-Deformationstensor
dS 2 = dX · dX = (F−1 · dX) · (F−1 · dX) = dX · B−1 · dX
(171)
kinem970
(172)
kinem980
mit der Definition
B = F · FT
→
B−1 = FT −1 · F−1 .
B ist ebenfalls symmetrisch und bezieht sich auf die Geometrie der aktuellen Konfiguration,
da B in Gleichung 171 auf Lininenelemente der aktuellen Konfiguration angewandt wird.
Da die Definition der Deformationstensoren von dem Quadrat der Linienelemente ausgeht,
ist keine Orientierungsinformation enthalten. Somit beinhalten die Deformationstensoren
nur noch Information über die Längenänderung der Linienelemente, nicht aber über die
Drehung, die die Linienelemente von der Referenz- in die Momentankonfiguration erfahren
haben.
Im undeformierten Zustand oder im Fall einer Strarrkörperbewegung ist F = I. Dann
nehmen die Deformationstensoren C und B ebenfalls den Wert I an. Da man es gewohnt
ist, sich bei der Angabe der Deformation auf die Ausgangsgröße zu beziehen, führt man
im weiteren Verzerrungstensoren ein, die sich aus der Differenz der Quadrate der Linienelemente in den beiden Konfigurationen ergeben. Die entsprechenden Anfangswerte im
undeformierten Zustand sind dann Null. Man betrachtet dazu die Differenz
ds2 − dS 2 = dX · dX − dX · dX
(173)
kinem1000
und drückt entweder die Linienelemente der Referenzkonfiguration durch die der Momentankonfiguration aus oder andersherum. Im ersten Fall erhält man
ds2 − dS 2 = dX · (C − I) · dX.
(174)
kinem1010
(175)
kinem1020
Analog ergibt sich im zweiten Fall
ds2 − dS 2 = dX · (I − B−1 ) · dX.
Über die Beziehung 174 wird der Green-Lagrangesche Verzerrungstensor (auch nur als
Greenscher Verzerrungstensor bezeichtnet) definiert als
ds2 − dS 2 = dX · 2 E · dX
→
E :=
1
(C − I).
2
(176)
kinem1030
60
Kontinuumsmechanik WS 16/17
Der Faktor 1/2 in der Definition von E ist Konvention. Er wird eingeführt, damit die
linearisierte Variante des Greenschen Verzerrungstensors mit den klassischen Ingenieurdehnungen ε übereinstimmt. E ist wie C ein Tensor der Referenzkonfiguration. Analog
definiert sich der Euler-Almansi-Verzerrungstensor
A =
1
(I − B−1 ).
2
(177)
kinem1040
Er stellt im Gegensatz zum Lagrangeschen Verzerrungstensor einen Tensor der Momentankonfiguration dar.
Die beiden eingeführten Verzerrungstensoren E und A lassen sich durch push forward bzw.
durch pull back in einander transformieren. Der Transport einer tensoriellen Größe der
Referenzkonfiguration in eine Größe der Momentankonfiguration wird dabei als Vorwärtstransport (engl. push forward) bezeichnet, der Transport einer Größe der Momentankonfiguration zurück in die Referenzkonfiguration als Rückwärtstransport (engl. pull back).
Vergleicht man die Definitionen der beiden Verzerrungstensoren 176 und 177 miteinander, so sieht man, dass aus diesen Definitionen die Regeln für die Transportorperationen
ableitbar sind. Es ergibt sich
E =
FT · A · F
(pull back),
(178)
A = FT −1 · E · F−1
4.6
kinem1050
(push forward).
Darstellung mittels Verschiebungsgradient
Die Verschiebung u eines materiellen Punktes ist der Differenzvektor zwischen den Ortsvektoren der Referenz- und der Momentankonfiguration:
u = x − X.
(179)
kinem1060 Als zentrale Größe wurde die Verschiebung bereits in Gleichung 3 bzw. in Abbildung 4 eingeführt. Die Bewegungsfunktion kann eindeutig über den Verschiebungsvektor
dargestellt werden. Umstellen von ?? liefert
x = χ(X, t) = X + u(X, t).
(180)
kinem1060
Grad X =
(181)
kinem1070
∂(X + u)
= I + Grad u
∂X
(182)
kinem1080
Mit der Vektoridentität
∂X
= I
∂X
und dem Verschiebungsvektor gemäß ?? kann der Deformationsgradient
F =
α-Version vom 3.12.2016
61
aus dem Verschiebungsgradienten Grad u berechnet werden. Für den inversen Deformationsgradienten findet man die Darstellung
F−1 =
∂X
∂(x − u)
=
= I − grad u.
∂x
∂x
(183)
kinem1090
Dabei wurde der Gradient bzgl. des Ortsvektors x in der Momentankonfiguration eingeführt
grad(. . .) =
∂(. . .)
∂(. . .)
=
ei .
∂x
∂xi
(184)
kinem1090
Die beiden Gradientenoperatoren Grad(. . .) und grad(. . .) können in einander überführt
werden, wenn man den Zusammenhang zwischen den Ortsvektoren X der Referenz- und den
Ortsvektoren x der Momentankonfiguration durch die Bewegungsfunktion berücksichtigt.
Unter Anwendung der Kettenregel gilt dann
Grad(. . .) =
∂(. . .) ∂x
∂(. . .)
=
= grad(. . .) F.
∂X
∂x ∂X
(185)
kinem1090
Die zwei Beziehungen 182 und 183, in denen der Deformationsgradient durch die materiellen bzw. räumlichen Verschiebungsgradienten ausgedrückt wird, können genutzt werden,
um die Verzerrungstensoren E und A durch die Verschiebungsgradienten Grad u der Referenzkonfiguration oder grad u der Momentankonfiguration auszudrücken. Man findet durch
Einsetzen
E =
1
(FT
2
A =
1
(I
2
· F − I)
=
1
(Grad
2
u + GradT u + GradT u · Grad u),
(186)
T −1
−F
−1
·F ) =
1
(grad
2
T
T
u + grad u + grad u · grad u).
Diese Darstellungen zeigen nochmals deutlich, dass sich der Green-Lagrangesche Verzerrungstensor E auf die Referenzkonfiguration und der Euler-Almansische Verzerrungstensor
A auf die Momentankonfiguration bezieht, da die jeweiligen Verschiebungsableitungen bzgl.
X oder x gebildet werden. Die Verzerrungstensoren der Theorie großer Deformationen unterscheiden sich von der Ingenieurverzerrung ε der geometrisch linearen Theorie durch die
quadratischen Anteile in den Verschiebungsgradienten.
4.7
Geschwindigkeitsgradient
Während die Verzerrungstensoren zur Darstellung elastischen Materialverhaltens genutzt
werden, benötigt man zur Beschreibung viskosen Verhaltens die Verzerrungsraten. Die
grundlegende kinematische Größe, mit der die Verzerrungsraten berechnet werden können,
ist der Geschwindigkeitsgradient. Um den Geschwindigkeitsgradienten einzuführen, betrachtet man die Rate, mit der sich ein Linienelement verändert.
kinem1100
62
Kontinuumsmechanik WS 16/17
Die Änderungsgeschwindigkeit von Linienelementen ergibt sich aus der materiellen Zeitableitung von 152
d(dx)
d
=
(F · dX).
(187)
dt
dt
Da das materielle Linienelemente dX in der Referenzkonfiguration zu einem festen Zeitpunkt t0 ausgewählt werden, ist es zeitlich konstant, d(dX)/dt = 0. Damit ergibt sich
unter Beachtung der Produktregel der Differentiation
d(dx)
= Ḟ · dX.
dt
(188)
kinem1290
kinem1300
Berücksichtigt man weiterhin den Zusammenhang v = ẋ zwischen dem Ortsvektor und der
Geschwindigkeit eines materiellen Punktes sowie die Definition des Deformationsgradienten
153, so findet man die Darstellung
Ḟ =
∂v
= Grad v
∂X
(189)
kinem1310
für den materiellen Geschwindigkeitsgradienten. Dabei wird vorausgesetzt, dass die materielle Zeitableitung d(. . .)/dt und die Ableitung nach den Ortsvektoren X der Referenzkonfiguration vertauschbar sind, da t und X von einander unabhängig sind.
Der räumliche Geschwindigkeitsgradient entsteht, wenn man auf der rechten Seite von
293 das Linienelement der Referenzkonfiguration mittels 152 durch das Linienelement der
aktuellen Konfiguration ausdrückt:
dx
= Ḟ · F−1 · dX = L · dx.
dt
(190)
kinem1320
(191)
kinem1330
Damit ist der räumliche Geschwindigkeitsgradient als
L := Ḟ · F−1
definiert. Er bestimmt die Änderungsgeschwindigkeit eines Linienelements als lineare Funktion des Linienelements selbst. Faßt man 296 als Vorwärtstransport (push forward) des
materiellen Geschwindigkeitsgradienten 294 auf oder als eine Darstellung der Kettenregel
der Differentiation analog zu 185, so gelangt man zu der Darstellung
L = grad v.
(192)
kinem1340
Dabei ist zu beachten, dass v als Funktion des räumlichen Ortsvektors x gegeben sein muss,
um diese Beziehung auszuwerten. Die materielle Darstellung kann jedoch durch Einsetzen der inversen Bewegungsfunktion jederzeit in die entsprechende räumliche Darstellung
transformiert werden. Es gilt
v(X, t) = v(χ−1 (x, t), t) = ṽ(x t).
| {z }
=X
(193)
kinem1340
α-Version vom 3.12.2016
63
Formal muss zwischen den Funktionen v und ṽ unterschieden werden. Da jedoch die Parameterisierung durch den jeweiligen Zusammenhang deutlich wird und in der Regel keine
Verwechselungsgefahr besteht, verzichtet man meist auf die Verwendung von zwei verschiedenen Symbolen.
An manchen Stellen benötigt man für die Herleitungen auch die Zeitableitung des inversen
Deformationsgradienten F−1 . Da Zeitableitung und Invertierung nicht vertauscht werden
dürfen, geht man zur Berechnung von der folgenden Identität aus
F · F−1 = I.
(194)
kinem1560
Durch Bildung der materiellen Zeitableitung erhält man einen Ausdruck für die Ableitung
des inversen Deformationsgradienten
d
(F · F−1 ) = 0
dt
⇒
d(F−1 )
= − F−1 · Ḟ · F−1 = − F−1 L.
dt
(195)
kinem1570
Üblicherweise wird der räumliche Geschwindigkeitsgradient L in einen symmetrischen und
in einen schiefsymmetrischen Tensor aufgespalten
L = D + W.
(196)
kinem1350
D = DT
(197)
kinem1360
Dabei heißt die symmetrische Größe
Deformationsgeschwindigkeitstensor oder kurz Deformationsgeschwindigkeit. Man beachte,
dass es sich um eine tensorielle Größe handelt, auch wenn dies bei der zweiten Bezeichnung
nicht zum Ausdruck kommt. Die schiefsymmetrische Größe
W = − WT
(198)
kinem1370
wird als Drehgeschwindigkeitstensor oder Wirbeltensor bezeichnet. Die Zerlegung 298 ist
eindeutig und führt auf die Berechnungsvorschrift
D =
1
(L + LT ),
2
W =
1
(L − LT ).
2
(199)
kinem1380
So wie die Verzerrungstensoren zur Formulierung von Materialgesetzen für Festkörper herangezogen werden, dient die Deformationsgeschwindigkeit D der Formulierung von Stoffgleichungen für viskose Fluide. Die Interpretation der Deformationsgeschwindigkeit ergibt
sich aus der Änderungsgeschwindigkeit von Quadraten von Linienelementen
d
(dx · dx − dX · dX) = dẋ · dx + dx · dẋ
dt
= (L · dX) · dX + dX · (L · dX)
= dX · (L + LT ) · dX = dX · 2 D · dX.
(200)
kinem1380
64
Kontinuumsmechanik WS 16/17
Die Struktur von 200 entspricht der Struktur 168, die zur Einführung des Greenschen
Verzerrungstensors in 176 bzw. des Almansischen Verzerrungstensors geführt hat.
Die zeitliche Änderung der Verzerrungstensoren E und A steht in Zusammenhang mit der
Deformationsgeschwindigkeit. Aus 176 berechnet man
Ė =
1
1d T
(F · F) = (ḞT · F + FT · Ḟ).
2 dt
2
(201)
kinem1390
(202)
kinem1400
Ersetzt man nun die materielle Zeitableitung Ḟ durch die Identität
ḞT = FT · LT
Ḟ = L · F,
nach 296, so ergibt sich
1
1 T
(F · LT · F + FT · L · F) = FT · (L + LT ) · F.
(203)
2
2
Die Verzerrungsgeschwindigkeit D stellt somit den Vorwärtstransport der materiellen Zeitableitung des Green-Lagrangeschen Verzerrungstensors dar
Ė =
Ė = FT · D · F
kinem1450
(pull back),
(204)
kinem1460
Ersetzt man Ė in 204 durch den Rückwärtstransport des Almansitensors A nach 178, so
erhält man
D = FT −1 · (ḞT · A · F + FT · Ȧ · F + FT · A · Ḟ) · F−1 .
(205)
kinem1470
D = F
T −1
−1
· Ė · F
(push forward).
Mit der Definiton des räumlichen Geschwindigkeitsgradienten nach 296 folgt daraus
D = FT −1 · (FT · LT · A · F + FT · Ȧ · F + FT · A · L · F) · F−1
(206)
kinem1480
T
= Ȧ + L · A + A · L.
Die Verzerrungsgeschwindigkeit kann demnach über eine Rate des Almansitensors berechnet werden, die keine materielle Zeitableitung darstellt, sondern die sogenannte obere
Oldroyd-Ableitung oder die obere Lie-Ableitung
4
D =A .
(207)
Die obere Lie-Ableitung eines zweistufigen Tensors T ist dabei allgemein definiert als push
forward der materiellen Zeitableitung des pull backs einer tensoriellen Größe, die sich auf
die Momentankonfiguration bezieht. Die Berechnungsvorschrift für die obere Lie-Ableitung
wird als
4
T
(208)
A = Ȧ + L · A + A · L
kinem1500 ermittelt. Lie-Ableitungen spielen insbesondere bei Betrachungen von Relativbewegungen eine wesentliche Rolle, die hier allerdings nicht vertieft wird.
kinem1490
α-Version vom 3.12.2016
4.8
65
Bilanzgleichungen
Wie bereits in Abschnitt 2 dargelegt, werden die Bilanzaussagen axiomatisch eingeführt,
d. h. sie entstammen der Erfahrung und sind innerhalb der Theorie nicht beweisbar. Im vorliegenden Abschnitt werden die notwendigen Axiome zur Formulierung der Bilanzaussagen
für Masse, Impuls und Drall eingeführt und in die Sprache der Mathematik übersetzt.
4.9
Massenbilanz
Axiom: Die Masse eines materiellen Körpers ändert sich während seiner Bewegung nicht.
Ein materieller Körper behält also während der Bewegung seine Masse. Falls der materielle
Körper während der Bewegung in mehrere Teile zerfällt, z. B. durch Bruchvorgänge, bleibt
die Masse des Gesamtsystems (also aller Teilkörper) erhalten. Dieser Fall wird im weiteren
aber nicht diskutiert.
Mathematisch kann die Massenerhaltung für einen materiellen Körper B folgendermaßen
formuliert werden:
Z
Z
m(B, t) =
dm =
ρ dv = konst.
(209)
B
bilanz10
B
Darin bezeichnet B den materiellen Körper, dm ein Massenelement, dv ein Volumenelement
und
dm
(210)
ρ =
dv
die Dichte. Die Masse eines materiellen Körpers ergibt sich demnach aus der Integration
über die Massendichte ρ. Die Kontinuumsannahmen führen dazu, dass die Dichte in jedem
materiellen Punkt des Köpers definiert ist.
Bildet man von 209 die zeitliche Ableitung, so folgt
Z
d
ρ dv = 0.
dt
(211)
B
Gl. 211 stellt die globale Form der Massenerhaltung dar, d. h. eine Aussage, die für den
gesamten Körper gültig ist.
Oft ist man im Gegensatz zu 211 jedoch an sogenannten lokalen Aussagen interessiert, die
für jeden einzelnen Punkt im Inneren des Körpers B gelten. Dazu müssen die Integration
und die Differentiation vertauscht werden. Allerdings ist dabei zu beachten, dass sich das
von dem betrachteten Körper eingenommene Volumen während der Bewegung verändern
kann, so dass sich die Integration über ein zeitlich veränderliches Gebiet erstreckt (vgl.
Leibnizsche Regel). Formal kann man dieses Problem umgehen, indem man den Körper
bilanz20
bilanz30
66
Kontinuumsmechanik WS 16/17
auf die konstante Geometrie B0 der Referenzkonfiguration zurückzieht. Mit dem Zusammenhang 160 folgt dann
Z
Z
d
d
ρ det F dV = 0.
(212)
ρ dv =
dt
dt
B
bilanz40
B0
Da in Gl. 212 (rechts) das Integrationsgebiet B0 konstant ist, können Integration und
Differentiation vertauscht werden, sofern die Felder hinreichend stetig und differenzierbar
sind. Man findet
Z dρ
d
det F + ρ [det F] dV = 0.
(213)
dt
dt
bilanz50
B0
Im weiteren soll, sofern nichts anderes erwähnt wird, immer vorausgesetzt werden, dass die
notwendigen Stetigkeitsanforderungen erfüllt sind.
Es gilt (an dieser Stelle ohne Beweis)
d(det F)
= div v det F = J div v,
dt
(214)
bilanz60
so dass in 213 der Faktor J = det F ausgeklammert werden kann. Der Vorwärtstransport
(push forward) auf die aktuelle Konfiguration unter Beachtung von Gl. 160 liefert schließlich
Z
(ρ̇ + ρ div v) dv = 0.
(215)
bilanz70
B
Dieses Ergebnis erhält man auch, wenn man in 211 die Reihenfolge von Integration und
Differentiation umkehrt und formal die Produktregel der Differentiation anwendet, d. h.
man beachtet, dass sowohl die Dichte ρ als auch die materiellen Volumenelemente dv
zeitlich veränderlich sind. Es folgt mit dieser Argumentation
Z
Z
d
d
ρ dv =
(ρ dv) = 0.
(216)
dt
dt
B
bilanz80
B
Mit den Zusammenhängen 160 und 214 gilt
d(dv)
= div v dv,
dt
(217)
so dass sich der Zusammenhang 215 direkt ergibt.
Da man die entsprechenden Überlegungen auch für beliebige Teilkörper von B, insbesondere
auch für beliebig kleine Teilkörper, anstellen kann, muss der Integrand in 215 Null sein,
damit die integrale Aussage gilt für beliebige Teilkörper gelten. Diese Argumentation folgt
direkt aus der Kontinuumsannahme und dem Schnittprinzip.
bilanz90
α-Version vom 3.12.2016
67
Damit gelangt man schließlich zur lokalen Form der Massenbilanz
ρ̇ + ρ div v = 0.
(218)
bilanz100
(219)
bilanz100
(220)
bilanz100
(221)
bilanz100
(222)
bilanz100
(223)
bilanz100
Setzt man nach 214
(det F)•
div v =
det F
in 218 ein, so folgt die Trennung der Veränderlichen
(det F)•
ρ̇
= −
ρ
det F
Diese Form der Massenbilanz kann integriert werden
Zt
ρ̇
dt = −
ρ
t0
Zt
(det F)
dt.
det F
t0
Mit den Variablentransformationen
ρ̇ dt → dρ,
(det F) dt → d(det F)
und der Transformation der Integrationsgrenzen ergibt sich
Zρ
dρ̄
= −
ρ̄
ρ0
det
Z F
d(det F)
det F
1
Dabei wurden zum Anfangszeitpunkt t0 die Bedingungen ρ = ρ0 und det F = 1 und zum
Zeitpunkt t die Werte ρ und det F = J eingesetzt. Die Abkürzung J steht dabei für die
Jacobi-Determinante. Auswertung der Integrale führt schließlich auf die Beziehung
ρ = ρ0 (det F)−1 = ρ0 J −1 .
(224)
bilanz100
Diese Form der Massenbilanz gestattet es, aus der Anfangsdichte ρ0 und der Determinante
J des Deformationsgradienten den aktuellen Dichtewert zu berechnen. Diese Darstellung ist
vor allem in der Festkörpermechanik bei finiten Deformationen gebräuchlich. Die Beziehung
224 kann auch direkt aus der Gl. 209 motiviert werden, wenn man die Dichte und die
Volumenelemente auf die Referenzkonfiguration zurückzieht. Mit dem Argument, dass auch
die Masse beliebig kleiner materieller Körper unverändert bleibt, folgt dann
ρ dv = ρ0 dV,
(225)
bilanz100
(226)
bilanz100
und mit der Verknüpfung dv = J dV folgt schließlich der Ausdruck
ρ dv = ρ0 J −1 dv
→
ρ = ρ0 J −1
Die Aussage 225 ist identisch mit der Überlegung zur Massenbilanz im Abschnitt 2.
68
4.10
Kontinuumsmechanik WS 16/17
Impulsbilanz
Axiom: Der Impuls eines materiellen Körpers ändert sich durch die an ihm angreifenden
Kräfte.
In der globalen Formulierung kann man somit die Impulsbilanz als
l̇ = f
(227)
bilanz170
angeben. Der Impuls eines materiellen Körpers ist dabei durch seine Dichte und seine
Geschwindigkeit bestimmt
Z
Z
ρ ẋ dv.
(228)
l(B, t) =
ẋ dm =
bilanz180
B
B
Die auf den Körper einwirkende Kraft kann man in die Summe aus den Nah- und Fernwirkungskräften aufteilen. Die Nahwirkungskräfte wirken dabei über die Oberfläche ∂B auf
den Körper ein und haben ihre Ursache in der direkten Umgebung, die mit dem Körper
über seine Oberfläche in Kontakt steht. Die Fernwirkungskräfte haben ihre Ursache nicht
in der direkten Umgebung des Körpers und wirken in seinem Inneren. Eine typische Ferwirkungskraft ist die Gravitationskraft. Damit erhält man mit dieser Aufteilung
Z
Z
ρ b dv.
(229)
f =
t da +
bilanz190
B
∂B
Dabei stellt t die Spannungsvektor auf der Körperoberfläche dar, die durch Kontakt des
Körpers mit seiner Umgebung übertragen wird, während ρ b die Volumenkraftdichte ist,
die im Inneren des Körpers wirkt.
Die globale Form der Impulsbilanz lautet unter Beachtung von 228 und 229
Z
Z
Z
d
ρ ẋ dv =
t da +
ρ b dv.
dt
B
(230)
bilanz200
B
∂B
Gl. 230 stellt eine globale Aussage dar, die für den Körper als Ganzes Gültigkeit besitzt.
Genau wie bei der Massenbilanz ist man an einer lokalen Aussage interessiert, die an den
einzelnen materiellen Punkten innerhalb des Körpers gültig ist. Dazu muss wiederum die
Zeitableitung mit der Integration über den deformierbaren materiellen Körper vertauscht
werden.
Z
Z
d
d
ρ ẋ dv =
(ρ ẋ dv).
(231)
dt
dt
B
B
Mit dem Transporttheorem für Volumenelemente 217 und der Produktregel der Differentiation erhält man
Z
l̇ = (ρ̇ ẋ + ρ ẍ + ρ ẋ div ẋ) dv.
(232)
B
bilanz210
bilanz220
α-Version vom 3.12.2016
69
Dieser Ausdruck kann unter Berücksichtigung der lokalen Form der Massenbilanz 218 weiter
zusammengefaßt werden, und es verbleibt
Z
ρ ẍ dv
(233)
l̇ =
bilanz230
B
Allgemein gilt für massenbezogene Größen Ψ = ρ ψ
Z
Z
Z
d
Ψ dv = (Ψ̇ + Ψ div ẋ)dv = (ρ ψ̇ + ρ̇ ψ + ρ ψ div ẋ) dv.
dt
B
B
(234)
B
bilanz230a Die zwei letzten Summanden entsprechen der mit ψ multiplizierten lokalen Form
der Massenbilanz. Damit erhält man das Reynoldssche Transporttheorem in der Form
Z
Z
d
ρ ψ̇ dv.
(235)
ρ ψ dv =
dt
B
bilanz230
B
Um in Gl. 230 zu einer lokalen Aussage zu gelangen, muss weiterhin das Oberflächenintegral
der Nahwirkungskräfte in ein Volumenintegral transformiert werden. Die ist möglich, wenn
für die Oberflächenkraftdichte t auf dem Rand des Körpers das Cauchy-Theorem gilt
t = T · n,
(236)
bilanz240
wenn also ein Spannungstensor T existiert, der mit der Schnittnormalen n den Spannungsvektor auf der Oberfläche (oder einer beliebigen Schnittfläche durch den Körper) erzeugt.
In diesem Fall kann der Gaußsche Satz (Divergenztheorem) angewandt werden, sofern
der Spannungstensor über die notwendigen Stetigkeits- und Differentiationsanforderungen
verfügt. Es folgt
Z
Z
Z
tda =
T · n da =
div T dv.
(237)
bilanz250
∂B
∂B
B
Die Kombination der Gleichungen 230, 233 und 237 führt auf
Z
(ρ ẍ − div T − ρ b) dv = 0.
(238)
bilanz260
B
Da die Impulsbilanz 238 auch für beliebige Teilkörper gilt, muss der Integrand selbst Null
sein. Damit gelangt man zur lokalen Form der Impulsbilanz
ρ ẍ = div T + ρ b.
(239)
Diese Formulierung bezieht sich auf die aktuelle Konfiguration. Die Divergenz wird daher
auch bezüglich des Ortsvektors x der Momentankonfiguration gebildet.
Im Rahmen der Festkörpermechanik stellt man oft die Impulsbilanz im Bezug auf die
Geometrie der Referenzkonfiguration dar, d. h. man bezieht sich auf die undeformierte
bilanz270
70
Kontinuumsmechanik WS 16/17
Ausgangskonfiguration des Körpers. Um die entsprechende Darstellung der Impulsbilanz
anzugeben, startet man von der globalen Formulierung
Z
Z
Z
d
ρ b dv
(240)
ρ ẋ dv =
T · da +
dt
B
∂B
B
und transformiert diese auf den Bereich B0 des undeformierten Körpers zurück. Dazu
müssen die Volumen- und Flächenelemente gemäß 166 transformiert werden
Z
Z
Z
d
T −1
ρ b det F dV.
(241)
ρ ẋ det F dV =
T · ((det F) F
· dA) +
dt
B0
bilanz340
B0
∂B0
In den Volumenintegralen kann die Dichte ρ über die Massenbilanz 224 durch die Dichte
ρ0 der Referenzkonfiguration ersetzt werden
Z
Z
Z
d
T −1
ρ0 ẋ dV =
ρ0 b dV.
(242)
T · (det F F
· dA) +
dt
B0
bilanz330
bilanz350
B0
∂B0
In dem Oberflächenintegral wird die Größe
P = (det F) T · FT −1
(243)
bilanz360
eingeführt. Sie heißt erster Piola-Kirchhoff-Spannungstensor. Während die Cauchy-Spannung
t = T · n die wirkende Kraft auf ein Flächenelement der aktuellen Konfiguration bezieht, bezieht die erste Piola-Kirchhoff-Spannung die selbe Kraft auf ein undeformiertes
Flächenelement der Referenzkonfiguration. Man bezeichnet daher die erste Piola-KirchhoffSpannung auch als Nominalspannung. Im Gegensatz dazu stellt die Cauchy-Spannung die
wahre Spannung dar. Gemäß der Einführung dieser Spannungsgrößen gilt also
T · da = P · dA.
(244)
bilan370
Unter Anwendung des Gaußschen Integralsatzes und unter der üblichen Annahme der
Stetigkeit des Integranden gelangt man schließlich zu der lokalen Form der Impulsbilanz
mit Bezug auf die Referenzkonfiguration
d2 x
ρ0 2 = Div P + ρ0 b.
dt
(245)
Der Divergenzoperator in 245 bezieht sich dabei auf die Ortsvektoren X der Referenzkonfiguration.
Neben dem ersten Piola-Kirchhoff-Spannungstensor P werden in der Literatur auch die
gewichtete Cauchy-Spannung oder die Kirchhoff-Spannung
τ = (det F) T
(246)
bilanz380
α-Version vom 3.12.2016
71
bilanz390 und der zweite Piola-Kirchhoff-Tensor
S = (det F) F−1 · T · FT −1
(247)
bilanz400 eingeführt. Die Bedeutung des zweiten Piola-Krichhoff-Tensors wird im Rahmen
einer energetischen Betrachtung deutlich. Dazu geht man von der spezifischen Spannungsleistung
ρ w = T : D = T11 D11 + T12 D12 + . . .
(248)
bilanz400
aus und transformiert die Deformationsgeschwindigkeit in die Referenzkonfiguration. Dazu
nutzt man den Zusammenhang 204 zwischen D und Ė. Mit Anwendung der Rechenregeln
für das zweifach verjüngende Produkt zwischen Tensoren gelangt man dann zu der Aussage
w =
1
1
D : T =
Ė : S.
ρ
ρ0
(249)
bilanz400
Die spezifische Spannungsleistung lässt sich also entweder durch D und T oder durch
Ė und S darstellen. Gleichung 249 zeigt somit die Invarianz der Spannungsleistung bei
einem Wechsel der Bezugskonfiguration von der Momentan- auf die Referenzkonfiguration.
Die jeweils zusammengehörigen Größen D und T bzw. Ė und S werden als energetisch
konjugierte Variablen bezeichnet.
4.11
Drallbilanz
Axiom: Der Drall eines materiellen Körpers ändert sich durch die an ihm angreifenden
Momente.
Die globale Form der Drallbilanz kann gemäß dem zugrunde liegenden Axiom als
ḣp = mp
(250)
bilanz420
angegeben werden. Der Index p kennzeichnet dabei einen beliebigen aber festen Bezugspunkt xp , ohne Beschränkung der Allgemeinheit kann dazu der Ursprung des Koordinatensystems verwendet werden.
Der Drall eines materiellen Körpers ist durch das Moment des Impuls definiert und berechnet sich daher zu
Z
hp = (x − xp ) × ρ ẋ dv
(251)
B
In der englisch-sprachigen Literatur wird der Dall als moment of momentum“ bezeichnet.
”
Die auf den Körper einwirkenden Momente resultieren aus den Momenten der angreifenden
Kräfte mit Bezug auf den Punkt xp . Mit der bereits oben eingührten Aufteilung in Nah- und
bilanz430
72
Kontinuumsmechanik WS 16/17
Fernwirkungskräfte bzw. in Oberflächen- und Volumenkräftichten folgt für die zugehörigen
Momente
Z
Z
mp = (x − xp ) × t da + (x − xp ) × ρ b dv.
(252)
B
∂B
Setzt man die Beziehungen 251 und 252 in die Drallbilanz ein, so gelangt man zu der
folgenden globalen Darstellung der Drallbilanz
Z
Z
Z
d
(253)
(x − xp ) × ρ ẋ dv = (x − xp ) × (T · n) da + (x − xp ) × ρ b dv.
dt
B
bilanz440
bilanz450
B
∂B
Vertauscht man auch hier auf der linken Seite die materielle Zeitableitung mit der Integration über das von dem Körper eingenommene, veränderliche Volumen, so ergibt sich unter
Beachtung des Reynoldsschen Transporttheorems 235
Z
Z
d
d
(x − xp ) × ρ ẋ dv =
[(x − xp ) × (ρ ẋ) + (x − xp ) × ρ ẋ div ẋ] dv
dt
dt
B
B
Z
(254)
=
(x − xp ) × ρ ẍ dv.
bilanz460
B
Dabei wurde beachtet, dass das Kreuzprodukt zwischen zwei parallelen Vektoren Null ist,
ẋ × ρ ẋ = 0,
(255)
bilanz470
und dass der Bezugspunkt xp fest gewählt ist, d. h. ẋp = 0. Weiterhin wurde von der
Massenbilanz 218 Gebrauch gemacht.
Um das Oberflächenintegral wieder in ein Volumenintegral umformen zu können, muss das
Kreuzprodukt zwischen einem Vektor und einem Tensor definiert werden. Analog zu dem
Vektorprodukt 114 gilt dann
3
a × B := E : (a ⊗ B).
(256)
bilanz480
Falls der Tensor B selbst als Dyadenprodukt zweier Vektoren b und c dargestellt werden
kann, folgt aus 256
a × (b ⊗ c) = (a × b) ⊗ c.
(257)
bilanz490
Das Ergebnis dieses Produktes ist ein Tensor 2. Stufe.
Das Ergebnis ist also ein Tensor zweiter Stufe, der aus dem Dyadenprodukt von a × b und
c gebildet wird. Für das Oberflächenintegral in 253 heißt das
(x − xp ) × (T · n) = [(x − xp ) × T] · n.
(258)
bilanz500
Als Konsequenz dieser Überlegungen kann nun der Gaußsche Integralsatz angewandt werden, so dass man
Z
Z
(x − xp ) × (T · n) da =
div[(x − xp ) × T] dv
(259)
bilanz510
∂B
B
α-Version vom 3.12.2016
73
erhält.
Unter Verwendung kartesischer Koordinaten kann man zeigen, dass für den Divergenzausdruck auf der rechten Seite von 259
3
div[(x − xp ) × T] = E : T + (x − xp ) × div T.
(260)
bilanz520
(261)
bilanz520
gilt, wobei
1 3
T
E: T
2
der axiale Vektor (vgl. Gl. 113) zum Spannungstensor ist.
A
t=
Kombination der Zwischenergebnisse führt auf
Z
Z h
i
A
2 t dv.
(x − xp ) × (ρ ẍ) − (x − xp ) × div T − (x − xp ) × ρ b dv =
|B
(262)
B
{z
}
=0
bilanz550 Man erkennt, dass die linke Seite von ?? durch die mit x − xp multiplizierte
Impulsbilanz 239 gegeben ist. Als endgültiges Ergebnis der Drallbilanz erhält man daher
die Aussage
A
t = 0.
(263)
bilanz560 Der axiale Vektor des Spannungstensors ist identisch mit dem Nullvektor. Dies
ist genau dann der Fall, wenn der Spannungstensor symmetrisch ist.
Für den Spannungstensor wird in einer kontinuumsmechanischen Theorie eine Verknüpfung
mit kinematischen Größen, z. B. mit Verzerrungstensoren, postuliert. Die wohl bekannteste Beziehung der sogenannten Konstitutivgleichungen ist das verallgemeinerte Hookesche
Gesetz. In diesem Fall ist der Spannungstensor proportional zur Verzerrung. Die durch die
Drallbilanz geforderte Symmetrie ist damit grundsätzlich erfüllt, so dass bei Verwendung
des verallgemeinerten Hookeschen Gesetztes die Drallbilanz keine neue Information liefert.
In den Anwendungen tritt sie daher auch meist nicht explizit auf.
Startet man alternativ zu der axiomatischen Einführung der Drallbilanz von dem BoltzmannAxiom , das die Symmetrie des Spannungstensors postuliert, so ergibt sich die Drallbilanz
als direkte Konsequenz der Impulsbilanz. Die beiden Axiome sind daher äquivalent und
aus der Wahl eines von beiden folgt jeweils das andere. Die Wahl der Drallbilanz als Axiom
hat den Vorteil, dass leicht Erweiterungen vorgenommen werden können. Postuliert man
neben der Existenz von Kraftspannungen auch Momentenspannungen, so gelangt man zu
Cosserat-Kontinuum, in dem der materielle Punkt mit den Freiheitsgraden eines starren
Körpers ausgestattet ist (translatorische und rotatorische Freiheitsgrade).
Mit der Definition des 1. Piola-Kirchhoff-Spannungstensors nach Gl. 243
P = (det F) T · FT −1
(264)
bilanz560
74
Kontinuumsmechanik WS 16/17
und der Symmetrie der Cauchy-Spannung folgt
det F T = P · FT = F · PT .
(265)
Die 1. Piola-Kirchhoff-Spannung ist also im Allgemeinen ein unsymmetrischer Tensor. Im
Gegensatz dazu ist der 2. Piola-Kirchhoff-Spannungstensor S symmetrisch.
bilanz560
α-Version vom 3.12.2016
5
75
Linearisierung
Die Verzerrungstensoren E und A sind bezüglich des Verschiebungsvektors u nichtlinear,
da quadratische Terme auftreten. Konstitutivbeziehungen, die Spannungen und Deformationsgrößen verknüpfen, sind häufig ebenfalls durch nichtlineare Zusammenhänge gegeben.
Man ist daher an einer Linearisierung um einen als bekannt angenommenen Verschiebungszustand u0 interessiert. Entsprechende Linearisierungen werden z. B. bei der numerischen
Lösung der Feldgleichung benötigt, um das allgemeine nichtlineare Problem durch einen
Satz linearer Gleichungen zu approximieren.
Die Linearisierung kann formal über die Richtungsableitung bestimmt werden. Dazu nimmt
man für den Verschiebungszustand nimmt an, dass er additiv in eine bekannte Verschiebung
und eine Abweichung davon zerlegt werden kann,
u = u0 + ε ∆u.
(266)
kinem1110
Dabei stellt u0 den bekannten Bezugszustand dar, ∆u ist ein Verschiebungsinkrement, von
dem man annimmt, das es klein ist, und ε ein Größenordnungssymbol, das die Kleinheit
von ∆u kennzeichnet. Für ein beliebiges Funktional F(u) ergibt sich die Linearisierung
lin (F(u)) = F(u)|ε=0 +
dF(u)
|ε=0 = F(u0 ) + dF
dε
(267)
kinem1120 mit Hilfe der Richtungsableitung von F in Richtung des Inkrements ∆u. Für
den Deformationsgradienten findet man auf diese Weise
mit
lin (F) = lin(I + Grad u) = F0 + dF = I + Grad u0 + dF
(268)
kinem1130
dF d [I + Grad(u0 + ε ∆u)] dF =
=
.
dε ε=0
dε
ε=0
(269)
kinem1140
(270)
kinem1150
(271)
kinem1160
Die Auswertung der Ableitung an der Stelle ε = 0 liefert mit konstantem I und u0
dF = Grad ∆u.
Somit erh“alt man die formale Linearisierung des Deformationsgradienten
lin (F) = F0 + Grad ∆u.
Da der Deformationsgradient linear in der Verschiebung ist, ergibt sich gemäß der Summenregel der Differentiation direkt die lineare Struktur von 271. Für den inversen Deformationsgradienten lautet die Linearisierung
d −1
−1
−1
lin(F ) = F (u0 ) +
F (u0 + ε ∆u) .
(272)
dε
ε=0
kinem1160
76
Kontinuumsmechanik WS 16/17
Die einfachste Art, die Ableitung des inverse Deformationsgradienten zu berechnen, nutzt
die implizite Ableitung
dI
d
F−1 · F =
= 0.
(273)
dε
dε
Nach der Produktregel folgt
dF
dF−1
· F + F−1 ·
= 0,
dε
dε
kinem1160
(274)
kinem1160
(275)
kinem1160
so dass man letztendlich zu dem Ausdruck
dF−1
dF
= − F−1 ·
· F−1 .
dε
dε
für die Ableitung des inversen Deformationsgradienten gelangt. Damit ergibt sich die Linearisierung des inversen Deformationsgradienten zu
−1
−1
lin(F−1 ) = F−1
0 − F0 · Grad ∆u · F0 .
(276)
kinem1160
Für den Greenschen Verzerrungstensor verfährt man bei der Linearisierung analog nach
der Bildungsvorschrift
lin(E) =
1 T
1 d
F0 · F − I +
FT · F − I ε=0
2
2 dε
(277)
Die Ableitung errechnet sich nach der Produktregel zu
T
dF
d
T
T dF
F · F − I ε=0 =
·F + F ·
= GradT ∆u·F0 + FT0 ·Grad ∆u (278)
dε
dε
dε ε=0
Dabei wurde für das Inkrement des Deformationstensors die Beziehung 270 genutzt. Mit
der Abkürzung
C0 = FT0 · F0
(279)
kinem1170
kinem1170
kinem1170
für den rechten Cauchy-Green-Deformationstensor des Bezugszustands folgt schließlich die
Darstellung des linearisierten Greenschen Verzerrungstensors
lin(E) =
1
1
(C0 − I) +
GradT ∆u · F0 + FT0 · Grad ∆u .
2
2
(280)
kinem1170
Setzt man für den Deformationsgradienten des Bezugzustands noch die Beziehung 268 ein,
so erhält man eine Darstellung des linearisierten Greenschen Verzerrungstensors bezüglich
der Verschiebung
lin (E) = 12 Grad u0 + GradT u0 + GradT u0 · Grad u0
+ Grad ∆u + GradT ∆u + GradT u0 · Grad ∆u + GradT ∆u · Grad u0 .
(281)
kinem1180
α-Version vom 3.12.2016
77
Im Fall der Linearisierung um den Referenzzustand gilt
u0 = 0
bzw.
F0 = I,
so dass sich als Linearisierung die Ingenieurverzerrung
1
T
ε = lin (E(u0 = 0)) =
Grad ∆u + Grad ∆u
2
(282)
kinem1190
(283)
kinem1200
ergibt. Bezüglich eines orthonormierten Koordinatensystems mit den Basisvektoren ei und
der Identifikation u =
ˆ ∆u bestimmt man die folgende Darstellung
1
ε =
ui,j + uj,i ei ⊗ ej
(284)
2
oder als Koeffizientenschema
1
(u1,2
2
u1,1
εij = 12 (u1,2 + u2,1 )
1
(u1,3
2
+ u3,1 )
+ u2,1 )
u2,2
1
(u2,3
2
1
(u1,3
2
1
(u2,3
2
+ u3,2 )
+ u3,1 )
kinem1210
+ u3,2 ) .
(285)
kinem1220
u3,3
Um den Almansi-Verzerrungstensor bezüglich der Verschiebung zu linearisieren nutzt man
die Beziehung 276. Ausgehend von
A =
1
I − FT −1 · F−1
2
(286)
kinem1230
(287)
kinem1240
(288)
kinem1250
(289)
kinem1260
(290)
kinem1270
ergibt sich für die Linearisierung
lin(A) =
1
1 d
I − FT0 −1 · F−1
I − FT −1 · F−1 ε=0 .
+
0
2
2 dε
Die Ableitung berechnet man als
dFT
FT −1 ·
· FT −1 · F−1
dε
d
I − FT −1 · F−1 ε=0 =
dε
T −1
−1 dF
−1
+F
·F ·
·F
=
dε
ε=0
T −1
−1
· F−1
FT0 −1 · GradT ∆u · F0T −1 · F−1
0 + F0
0 · Grad ∆u · F0 .
Mit
B0 = F0 · FT0
bzw.
B−1
= FT0 −1 · F−1
0
0
folgt für die linearisierte Form des Almansischen Verzerrungstensors
lin(A) =
1
1 T −1
T
−1
−1
−1
I − B−1
+
F
·
Grad
∆u
·
B
+
B
·
Grad
∆u
·
F
.
0
0
0
0
2
2 0
78
Kontinuumsmechanik WS 16/17
Falls die Bezugskonfiguration wiederum die Referenzkonfiguration ist, d. h. u0 = 0, findet
man
lin ((A(u0 = 0)) ε = lin (E(u0 = 0)) .
(291)
kinem1280
Wenn mann die Referenzkonfiguration als Bezugskonfiguration betrachtet und sich auf
kleine Verschiebungen ∆u beschränkt, dann sind die Linearisierungen der beiden Verzerrungstensoren E und A identisch und entsprechen der Ingenieurverzerrung ε , die für den
Fall kleiner Verschiebungen und kleiner Verschiebungsgradienten hergeleitet wurde.
Nutzt man im weiteren den Zusammenhang 183 zwischen den Gradienten bezüglich der
Momentankonfirguration und den Gradienten bezüglich der aktuellen Konfiguration in
folgender Form
grad0 (. . .) · F−1
= Grad(. . .)
(292)
0
kinem1290
so erhält man die folgende Darstelllung des linearisierten Almansitensors
lin(A) =
1
1
−1
+
I − B−1
gradT0 ∆u · B−1
0
0 + B0 · grad0 ∆u .
2
2
(293)
kinem1300
Die Linearisierung von Spannungs-Dehnungs-Beziehungen folgt ebenfalls dem skizzierten
Schema. Grundsätzlich lassen sich elastische Beziehungen angeben, bei denen die Spannungstensoren als Funktion eines Verzerrungstensors und damit des Deformatinsgradienten
gegeben werden. Geht man davon aus, dass für den ersten Piola-Kirchhoff-Spannungstensor
eine Beziehung
P = P(F)
(294)
kinem1310
gegeben ist, dann erfolgt die Linearisierung dieser Beziehung zu
dP (F(u0 + ε∆u)) lin(P) = P0 +
.
dε
ε=0
(295)
kinem1320
(296)
kinem1330
Dabei stellt
P0 = P(F0 )
den Spannungszustand dar, der sich unter dem Verschiebungsfeld u0 des Bezugszustands
einstellt. Das Spannungsinkrement kann unter Anwendung der Kettenregel ermittelt werden
∂P ∂F dP =
:
,
(297)
∂F
∂ε ε=0
kinem1340
Dabei stellt die Ableitung
4
∂P =C
∂F F=F0
(298)
kinem1350
einen vierstufigen Steifigkeitstensor dar. Die Ableitung des Deformationsgradienten liefert
wieder den Gradienten des Verschiebungsinkrements, so dass die linearisierte SpannungsDehnungs-Beziehung die folgende Form erhält
4
lin(P) = P0 + C : Grad ∆u.
(299)
kinem1360
α-Version vom 3.12.2016
79
Falls die Bezugskonfiguration spannungsfrei ist, d. h. P0 = 0 und der vierstufige Steifigkeitstensor über die richtigen Symmetrien verfügt, entsteht das verallgemeinerte Hookesche
Gesetz
lin(P) = σ =
4
4
2 µ I 23 + λ I
4
: ε =C: ε
(300)
kinem1370
80
Kontinuumsmechanik WS 16/17
α-Version vom 3.12.2016
fig_rheo_1
81
Abbildung 26: Kraft und Verschiebung im einachsialen Zugversuch (a) als Funktion der
Zeit und (b) zugehöriges Kraft-Verschiebungsdiagram
6
Rheologie
In den bisherigen Überlegungen wurden die kinematischen Beziehungen und die Bilanzgleichungen behandelt. Die Verknüpfung zwischen kinematischen Größen (Verzerrungen,
Verzerrungsgeschwindigkeiten) und dynamischen Größen (Spannungen) erfolgt durch Materialgesetze, so genannte Konstitutivgleichungen. Diese werden im Rahmen der Kontinuumsmechanik phänomenolgisch motiviert. Sie basieren somit auf experimentellen Ergebnissen, die in geeignete mathematische Funktionen überführt werden. Bislang wurde
das verallgemeinerte Hookesche Gesetz zur beschreibung linear-elastischen Verhaltens motiviert, neben dem elastischen Verhalten werden in Experimenten jedoch einige andere
Effekte beobachtet, die in der Modellierung berücksicht werden müssen.
Das klassische Experiment, das zur Charakterisierung herangezogen wird, ist der einachsiale Zugversuch. Eine typische Probe ist lang und schlank, Abb. 14 zeigt eine Normprobe
nach ISO 527-2-1996. Probe wird dabei entlang ihrer Achse belastet. Die Kraft und die
Verlängerung der Probe werden gemessen. Da nach dem Saint Venantsche Prinzip die
Störungen im Spannungs- und Dehnungsfeld durch die Einspannungen an den Probenenden bereits nach einer kurzen Entfernung abgeklungen sind, kann man davon ausgehen,
dass sowohl der Dehnungs- als auch der Spannungszustand im Zentrum der Probe homogen sind, so dass aus den Messgrößen Kraft und Verschiebung dirket die relativen Größen
Spannung und Dehnung nach Gl. 54 und 55 berechnet werden können.
Abbildung 28 a) zeigt in blau eine typischen Verschiebungsverlauf, der mit einer Belastungs, einer Halte- und einer Entlastungsphase im einachsialen Zugversuch aufgebracht wird,
sowie in rot die zugehörige, gemessene Kraftkurve als Funktion der Zeit. Eliminiert man die
Zeit aus der Darstellung, so entsteht die Kraft-Verschiebungskurve b). In der Darstellung
sieht man, dass die Kraft mit der Verschiebung ansteigt. Zunächst ist die Steigung der
Kurve nahezu linear, bis ein Knick auftritt. Die Steigung wird flacher, die Kurve verläuft
82
fig_rheo_2
Kontinuumsmechanik WS 16/17
Abbildung 27: Spannungs-Dehnungskurve eines zyklischen Zugversuchs an einem EPDMWerkstoff, schwarz: Experiment, blau: Simulation
insgesamt mit stärkerer Krümmung. Während der Haltephase kommt es zu einer geringen
Relaxation der Kraft, die sich in Abb. 28 durch einen Abfall der Kraft bei konstanter
Verschiebung äussert., bevor die Kraft in der Entlastungsphase wieder nahezu proportional
zur Verschiebung verläuft. Weiterhin stellt man fest, dass die Probe vollständig entlastet
ist, bevor die Verschiebung wieder auf Null zurückgeht. Der Probekörper wurde in dem
Experiment bleibend deformiert. In den bisherigen Betrachtungen wurde linear elastisches
Materialverhalten zugrunde gelegt.
Das Verhalten der Aluminiumprobe ist im wesentlichen elastisch-plastisch. Die Plastizitt
setzt beim Erreichen der Fließspannung ein, was sich durch den Knick in der KraftVerschiebungskurve äußert. Whrend der weiteren Deformation verfestigt sich der Werkstoff. Am Ende der Belastungsphase fällt die Kraft während der Haltephase geringfügig
ab. Dieser viskose Effekt ist jedoch gegenüber dem Einfluß der Plastiztität vernachlässigbar.
Abbildung 29 zeigt im Gegensatz dazu das Verhalten einer Polymerprobe aus einem handelsüblichen rußgefüllten Gummiwerkstoffe (EPDM) in einem zyklischen uniaxialen Versuch. Man sieht zum einen das ausgeprägt nichtlineare Verhalten des Polymerwerkstoffs
und zum anderen die geschlossene Hystereskurve. Die Größe der von der Hystere einge-
α-Version vom 3.12.2016
83
schlossenen Fläche hängt von der Geschwindigkeit ab, mit der der Versuch durchgeführt
wird. In diesem Fall ist das elastische Verhalten von viskosen Effekten überlagert. Man
spricht von Viskoelastizität.
Grundsätzlich lassen sich aus uniaxialen Experimenten vier unterschiedliche Gruppen von
Materialverhalten ableiten, die jeweils Idealisierungen darstellen. Reales Materialverhalten
besteht immer aus einer Überlagerung der Effekte in unterschiedlich starker Ausprägung.
Die vier Idealisierungen sind
• Ratenunabhängiges Verhalten
• Ratenabhängiges Verhalten
• ohne Gleichgewichtshysterese
• mit Gleichgewichtshysteres
Im ersten Fall der Aluminiuimprobe wird das Materialverhalten durch (im wesentlichen)
ratenunabhängiges Verhalten mit Gleichgewichtshysterese beschrieben. Die Von der KraftVerschiebungs- oder Spannungs-Dehnungskurve eingeschlossene Hysteresefläche ist von der
Geschwindigkeit, mit der der Versuch durchgeführt wird, unabhängig. Das Verhalten ist
elastisch-plastisch. Im Fall der Polymerprobe ist das Verhalten ratenabhängig ohne Gleichgewichtshysterese. Mit zunehmender Be- und Entlastungsgeschwindigkeit verändert sich
die Hysterekurve. Bei unendlich langsamer Belastung verschwindet sie und Be- und Entlastungspfad sind identisch. Dieses Verhalten heisst visko-elastisch. Nach den Überlegungen
des 2. Kapitels ist das elastische Verhalten durch Ratenunabhängigkeit ohne Gleichgewichtshysterese gekennzeichnet. Be- und Entlastungspfad sind in diesem Fall immer identisch. Das Materialverhalten ist reversibel. Im Gegensatz dazu wird durch die Hystereschleifen Energie dissipiert, so das das viskoelastische und das elastisch-plastische Verhalten
irreversibel sind.
Betrachtet man neben dem einaxialen Zugversuch andere homogene Experiment, so charakterisiert das Materialverhalten grundsätzlich den funktionalen Zusammmenhang zwischen
der aufgebrachten Deformation und der daraus resultierenden Spannung. Für ein beliebiges
Experiement geht man davon aus, dass eine generalisierte Verschiebung u aufgebracht und
eine generalisierte Kraft F gemessen werden kann oder anderherum. Für den einaxialen
Zug identifiziert man die generalisierte Verschiebung u mit der Längsdehnung ε11 und die
generalisierte Kraft F mit der Normalspannung σ11 .
Das linear elastisches Verhalten eines Festkörpers wird dann durch eine Feder beschrieben,
bei der u und F durch ein Hookesches Gesetz mit der Federsteifigkeit c verhnüft sind,
F = c u.
(301)
Folgt ein Festkörper dieser dieser Beziehung, so wird er als Hookescher Körper bezeichnet.
Abbildung 28 visualisiert den entsprechenden Zusammenhang 301.
rheo10
84
Kontinuumsmechanik WS 16/17
Abbildung 28: Feder als rheologisches Element zur Beschreibung von elastischem Verhalten
fig_rheo_1
Das zweite rheologische Element, das man einführt, ist ein Dämpfer. Er beschreibt das
Verhalten eines linear viskosen Fluids mit dem Zusammenhang
F = d u̇.
(302)
rheo_20
In diesem Fall ist die Kraft proportional zur generalisierten Geschwindigkeit. Wirkt auf ein
Fluid eine Kraft, so ist das mit einem anhaltenden Fließvorgang verbunden. Die Dämpfungskonstante d entspricht dabei der Viskosität. Im rheologischen Kontext spricht man von
einem Newtonschen Körper, wenn das Materialverhalten durch Gleichung 302 beschrieben
wird. Die entsprechende Eigenschaft ist in Abbildung 29 dargestellt.
Das dritte rheologische Element, das man einführt um statische Hysterese zu beschreiben,
ist ein Reibelement. Mit dem Reibelelement wird Coulombsche Reibung beschrieben. Falls
die anliegende verallgemeinterte Kraft kleiner als ein bestimmter Grenzwert Fkrit ist, lässt
der Saint Venant Körper keine verallgeminerte Verschiebung zu. Wird der Grenzwert erreicht und versucht man nun, weiter zu belasten, dann reagiert der Sant Venant Körper
mit einer Deformationsgeschwindigkeit.
(
= 0
falls F < Fkrit
u̇
(303)
> 0
falls F = Fkrit und Belastung
Das Reibelement nach Abbildung 30 charakterisiert plastisches Verhalten.
Durch Kombination dieser drei Grundelement kann komplexeres Materialverhalten beschrieben werden. Die Kombination einer Feder und eines Dämpfers zu einem Zwei-ParameterModell liefert viskoelastische Eigenschaften. Die Parallelschaltung nach Abbildung 31 wird
als Kelvin-Voigt-Körper bezeichnet und charakterisiert die einfachste Form eines viskoelastischen Festkörpers.
rheo_30
α-Version vom 3.12.2016
85
Abbildung 29: Dämpfer als rheologisches Element zur Beschreibung von viskosem Verhalten
fig_rheo_2
fig_rheo_3
Abbildung 30: Reibelement als rheologisches Element zur Beschreibung von plastischem
Verhalten
86
Kontinuumsmechanik WS 16/17
fig_rheo_4
Abbildung 31: Zwei-Parameter-Modelle: Kelvin-Voigt-Körper als Parallelschaltung einer
Feder und eines Dämpfers
fig_rheo_5
Abbildung 32: Zwei-Parameter-Modelle: Maxwell-Körper als Reihenschaltung einer Feder
und eines Dämpfers
Wenn der Kelvin-Voigt-Körper mit einer generalisierten Verschiebung u deformiert wird,
antwortet er mit einer zugehörigen Kraft F . Unter Anwendung des Schnittprinzip, Abb. 31,
rechts, können die wirkenden Kräfte Fc in der Feder und Fd im Dämpfer sichtbar gemacht
werden. Da beide Elemente die selbe Verschiebung erfahren gilt nach den Beziehungen ??
für den Hookeschen Körper und 302 für den Newtonschen Körper
Fc = c, u und Fd = d u̇.
(304)
rheo_40
Geht man davon aus, dass die Elemente massefrei sind, dann stellt sich zwischen der
äußeren Kraft F und den Feder- und Dämpferkräften ein Gleichgewicht ein, so dass gilt
Fc + Fd = F.
(305)
rheo_50
Die Kombination der Beziehungen 304 und 305 liefert schließlich das Materialgesetz für
den Kelvin-Voigt-Körper in der Form
F = c u + d u̇.
(306)
Der Kelvin-Voigt-Körper stellt einen Festkörper dar, weil er im Gleichgewicht, d. h. im
Fall u̇ = 0, eine Kraft der Größe F = c u übertragen kann. Im Nichtgleichgewichtsfall
wächst die Kraft mit zunehmender Deformationsgeschwindigkeit. Die Eigenschaften des
Kelvin-Voigt-Körpers sind also viskoelastisch.
rheo_60
α-Version vom 3.12.2016
87
Abbildung 33: Relaxationskurven für ein rußgefülltes Gummi fig_rheo_6
Der Kelvin-Voigt-Körper besitzt viskoelastische Eigenschaften. Das Modell kann nur Kriechvorgänge aber keine Relaxationsvorgänge beschreiben. In einem idealen Relaxationsversuch
wird auf den Körper schlagartig eine Deformation aufgebracht, die danach festgehalten
wird. Dabei beobachtet man, wie die Spannung mit der Zeit absinkt. Abbildung 33 zeigt
typische Relaxationskurven zu verschiedenen Deformationsniveaus, wie sie an einem handelsüblichen rußgefüllten Gummi (EPDM) gemessen werde können. Da während der Relaxation u̇ = 0 gilt, folgt aus der Beziehung 306 für den Kelvin-Voigt-Körper, dass die
zugehörige Kraft konstant ist.
Die Alternative zum Kelvin-Voigt-Körper ist die Reihenschaltung der beiden rheologischen
Elemente. Abbildung 32 zeigt den resultierenden Maxwell-Körper. Schneidet man die Feder
und den Dämpfer frei und wendet die Gleichgewichtsbedingung an, so folgt, dass beide
Elelemte die selbe Kraft übertragen müssen.
F = Fc = Fd
(307)
rheo_70
Dabei ist zunächst nicht klar, wie sich die Gesamtdeformation auf die beiden Elemente
aufteilt. Geht man davon aus, dass sich die Feder um uc und der Dämpfer um ud verlängert,
so muss aus Kompatibilitätsgründen
u = uc + ud
(308)
rheo_80
88
Kontinuumsmechanik WS 16/17
Abbildung 34: 3-Parameter-Modell für einen viskoelastischen Festkörper fig_rheo_7
gelten. Die beiden Gleichungen 307 und 308 werden jetzt wieder mit den Materialgleichungen ?? und 302 für den Hookeschen und den Newtonschen Körper kombiniert. Mit
Fc = c uc
und Fd = d u̇d
(309)
und der Ableitung der kinematischen Bedingung 308 und der Elastizitätsbeziehung 3091
folgt schließlich
1
1
u̇ = Ḟ + F.
(310)
c
d
Sobald eine Kraft F auf dem Maxwell-Körper wirkt, reagiert er mit einer Deformationsgeschwindigkeit. Die Größe der Deformationsgeschwindigkeit hängt dabei sowohl von der
Größe der Kraft als auch von ihrer Änderungsgeschwindigkeit ab. Damit stellt der MaxwellKörper ein viskoelastisches Fluid dar.
Das einfachste Modell für einen viskoelastischen Festkörper ist ein Drei-Paramete-Modell,
das aus der Parallelschaltung einer Feder mit einem Maxwellmodell entsteht. Das entsprechende Modell mit den Parametern c0 , c1 und d1 ist in Abbildung 34 skizziert.
Bringt man schlagartig auf das Festkörpermodell der Abbildung 34 eine Verschiebung auf,
so dehnen sich die beiden Federn instantan. Hält man die aufgebrachte Deformation fest,
so wirkt auch auf den Dämpfer eine Kraft, die dazu führt, dass er sich aufweitet. Dadurch
wird die Kraft, die das Maxwell-Element anfangs übertragen hat abgesenkt, bis sie schließlich den Wert Null erreicht. Das Modell zeigt also die für eine viskoelastischen Festkörper
typischen Spannungsrelaxation. Wird andererseits der Körper schlagartig mit einer Kraft
belastet, so teilt sich diese zunächst zwischen dem Maxwell-Element und der Feder auf.
Die Kraft im Maxwell-Element relaxiert, so dass im Lauf der Zeit ein größerer Anteil der
Gesamtlast über die einzelne Feder abgetragen werden muss. Dabei muss sich die Länge
der Feder vergrößeren. Das Modell zeigt daher auch das typische Kriechverhalten unter
konstanter Kraft. Belastet man das Modell mit unterschiedlichen Deformationsraten, so
rheo_90
rheo_100
α-Version vom 3.12.2016
fig_rheo_8
89
Abbildung 35: Antworten des 3-Parameter-Modells auf konstante Deformationsgeschwindigkeiten
ergibt sich das in Abbildung 35 skizzierte Verhalten. Je schneller die Belastung erfolgt,
desto steiler steigt die Kraft-Verschiebungs-Kurve an, da beide Federn gedehnt werden,
der Dämpfer aber nicht genügend schnell relaxieren kann. Für unendlich schnelle Belastungen ergibt sich eine Steifigkeit des Modells als Summe der beiden Federsteifigkeiten,
im Fall unendlich langsamer Belastungen kann der Dämpfer sich dehnen und die Feder des
Maxwell-Elementes bleibt entspannt. Die Steifigkeit ist in diesem Fall durch die Steifigkeit der einzelnen Feder gegeben. Dieses Modell stellt das Grundkonzept zur Modellierung
viskoelastischer Festkörper dar und wird in Kapitel 7 weiter behandelt.
Elastisch-plastisches Verhalten ergibt sich, wenn Feder-Elemente mit einem Reibelement
kombiniert werden. Abbildung 36 zeigt ein 3-Parameter-Modell für einen elastisch-plastischen
Festkörper mit Verfestigung. Im Fall kleiner Lasten ist das Reibelement starr. Die Gesamtdeformation wird nur von der Feder mit der Steifigkeit c0 aufgenommen. Erreicht die
Kraft den kritischen Wert, so gleitet das Reibelement, die zweite Feder mit Steifigkeit c1
wird ebenfalls deformiert. Da in diesem Fall beide Federn in Reihe geschaltet sind, nimmt
die Steifigkeit ab, so dass die Kraft-Verschiebungs-Antwort mit einer geringeren Steigung
verläuft als im elastischen Bereich.
Durch weitere Verknüpfungen der Feder-, Dämpfer- und Reibelemente können Modelle für
komplexes Materialverhalten erzeugt werden. Diese rheologischen Modell sind grundsätzlich eindimensionale Vereinfachungen, die zur kontinuumsmechanischen Modellierung auf
eine dreidimensionale Formulierung erweitert werden müssen. Weiterhin sind sie von Hause
aus linear. Eine nichtlineare Verallgemeinerung ist grundsätzlich möglich, durch die Vielfalt an Möglichkeiten, die sich im Rahmen der nichtlinearen Formulierung ergeben, besteht
90
fig_rheo_9
Kontinuumsmechanik WS 16/17
Abbildung 36: 3-Parameter-Modell eines elastisch-plastischen Festkörpers mit Verfestigung
aber hier keine Allgemeingültigkeit.
ec_material
α-Version vom 3.12.2016
7
7.1
91
Materialmodelle
Lineare Elastizität
Die lineare Elastizität wurde bereits im Abschnitt 2.4 behandelt und wird hier nur der
Vollständigkeit halber nochmals wiederholt. Die Verallgemeinerung des Federgesetzes stellt
eine lineare Verknüpfung von Spannungen und Dehnungen dar
4
σ = C : ε,
(311)
mat10
d. h. die generalisierten Kräfte Q werden durch den Spannungstensor σ und die generalisierten Verschiebungen durch den Dehnungstensor ε ersetzt. Im Fall isotropen Verhaltens
besteht der vierstufige Steifigkeitstensor, der die Proportionalität zwischen Spannung und
Dehnung herstellt, aus einer Linearkombination der vierstufigen Fundamentaltensoren. Da
sowohl σ als auch ε symmetrisch sind, müssen nur der vierstufige Identitätstensor und der
Spurbildner berücksichtigt werden, die transponierende Abbildung liefert keine zusätzliche
Information. Damit folgt das verallgemeinerte Hookesche Gesetz zu
4
23
(312)
σ = 2 µ I + λ I : ε = 2 µεε + λ tr ε I.
mat20
Betrachtet man die Arbeit, die von der Spannung verrichtet wird, wenn man den Dehnungszustand von einem Wert ε 1 auf einen Wert ε 2 ändert, so besteht sie aus der Summe
aller Spannungskomponenten, mit mit den jeweils zugeordneten Dehnungskomponenten
entlang des Wegs vom Zustand 1 zum Zustand 2 Arbeit verrichten. Ausgehend von der
spezifischen Spannungsleistung
w = σ11 ε̇11 + σ12 ε̇12 + σ13 ε̇13 + . . . = σ : ε̇ε
(313)
mat20a
(314)
mat20b
berechnet sich die Arbeit als Integral der Leistung über die Zeit
Zt2
A12 =
Zε 2
Zt2
σ : ε̇ε dt =
w dt =
t1
t1
σ : dεε.
ε1
Da im Fall von elastischem Verhalten Be- und Endlastungspfad im Spannungs-DehnungsDiagramm 37 identisch sind und nach der Beziehung 312 die Spannungen ausschließlich
vom aktuellen Wert der Verzerrungen abhängen, wird in einem geschlossenen Be- und
Entlastungszyklus keine Arbeit verrichtet. Es existiert ein Potential Ψ für die Spannungen,
so dass gilt
∂Ψ(εε)
σ =
(315)
∂εε
Der Integrand in 313 kann dann als
σ : ε̇ε dt =
∂Ψ dεε
:
dt = dΨ
∂εε
dt
(316)
mat20c
mat20d
92
Kontinuumsmechanik WS 16/17
Abbildung 37: Spannungs-Dehnungs-Kurve im Fall von linearer Elastizität fig_mat_10
α-Version vom 3.12.2016
93
geschrieben werden. Damit folgt
A12 = Ψ(εε2 ) − Ψ(εε2 ).
(317)
mat20e
Führt man die Integration unter Verwendung des verallgemeinerten Hookeschen Gesetzes
311 aus, so bestimmt man die Verzerrungsenergiedichte für einen elastische Festkörper zu
Ψ = µε : ε +
7.2
1
λ (εε : I)2 .
2
(318)
mat20f
Lineare Viskoelastizität
Eine entsprechende dreidimensionale Verallgemeinerung der Dämpferbeziehung für das viskose Verhalten kann man als
σ = η1 ε̇ε + η2 tr ε̇ε I
(319)
mat30
angeben. Dabei treten formal zwei Viskositätsparameter η1 und η2 auf. Bei der experimentellen Untersuchung der Beziehung 319 stellt man jedoch fest, dass die Bestimmung beider
Konstanten sehr aufwändig ist, insbesondere volumetrische Dehnraten führen zu starken
Erwärmungen und damit sofort zu Viskositätsänderungen. Für viele viskose Werkstoffe
stellt man jedoch bei der Auswertung von Versuchen fest, dass die Berücksichtigung einer Viskosität η1 6= 0 ausreichend ist, um die beobachteten Effekte zu beschreiben. Der
volumetrische Anteil wird nach der Stokesschen Annahme vernachlässigt. Die reduzierte
Fassung lautet dann
σ = η1 ε̇ε
(320)
mat40
Auf der Basis der Verallgemeinerungen 312 und 320 kann man dann ein dreidimensionales
Modell für einen linear viskoelastischen Festkörper in Anlehung an das Drei-ParameterModell entwickeln. Beide Federn und der Dämpfer werden durch die entsprechenden Beziehungen modelliert. Da sich beide Federn nicht gleich dehnen, muss genau wie in Gleichung
308 die Gesamtdehnung ε aufgespalten werden
ε = εe + εi
(321)
Der Anteil ε e beschreibt die Dehnung der Feder im Maxwell-Element während die Dehnung
des Dämpfers durch ε i beschreiben wird. Die beiden Dehnungsanteile, die zur gesamten,
von aussen aufgebrachten Dehnung aufsummiert werden, heißen elastische und inelastische
Dehnung. Sie stellen interne Variablen dar, die erforderlich sind, um den Zustand des Systems vollständig zu beschreiben. Im Gegensatz zu den Primärvariablen, in diesem Fall
der Gesamtdehnung, kann der aktuelle Wert der internen Variablen nicht von aussen vorgegeben werden. Vielmehr stellt er sich in Abhängigkeit der Prozessgeschichte ein. Nach
321 ist für eine gegebene Verzerrung ε nur eine der beiden internen Variablen unabhängig.
Typischerweise wählt man als unabhängige Größe ε i .
mat50
94
Kontinuumsmechanik WS 16/17
Die Abbildung 34 motiviert weiterhin eine additive Zerlegung der Spannung in die Anteile,
die in der Einzelfeder und im Maxwell-Element übertragen werden. Ein Gleichgewichtszustand ist dadurch charakterisiert, dass sich die Kräfte und Verschiebungen nicht mehr
ändern. In diesem Zustand ist nach einiger Zeit das Maxwell-Element vollständig entlastet, da der Dämpfer sich so lange dehnt, bis die Feder im Maxwell-Element bei konstanter
Gesamtverschiebung entspannt ist. Die Spannung in der einzelnen Feder wird daher auch
als Gleichgewichtsspannung σ eq und die Spannung im Maxwell-Element als Nichtgleichgewichtsspannung σ neq bezeichnet. Die additive Aufspaltung der Gesamtspannung lautet
somit
σ = σ eq + σ neq .
(322)
mat60
Die dreidimensionalen Materialgesetze für die Federn und den Dämpfer können jetzt in der
folgenden Form angegeben werden
σ eq
= 2 µ0 ε + λ0 tr ε I
σ neq = 2 µ1 (εε − εi ) + λ1 (tr ε − tr εi ) I,
(323)
mat70
σ neq = η1 ε̇εi .
Die Beziehung für das Dämpferelement 3233 wird in diesem Zusammenhang als Evolutionsgleichung für die interne Variable ε aufgefasst
ε̇ε =
1
σ neq ,
η1
(324)
während die beiden verbleibenden Beziehungen 3231, 2 zur Ermittlung der Spannungen
dienen. Die Gleichungen 321, 322 und 323 stellen ein System von gekoppelten Gleichungen
dar, aus dem für ein gegebene Verzerrung ε und eine bekannte Verzerrungsgeschwindigkeit
ε̇ε die resultierende Spannung σ berechnet werden kann.
7.3
Plastizität
7.4
Viskoplastizität
7.5
Schädigung
mat80