2 Grundlagen
Werbung

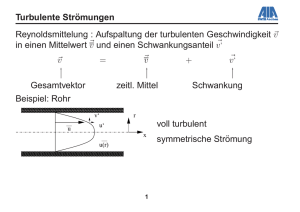
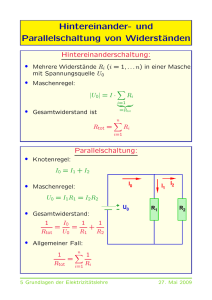
6 2 2 GRUNDLAGEN Grundlagen Um zu wissen, was unbekannt ist und um erkennen zu können, wie man den nächsten Schritt möglicherweise zu setzen hat, um das Unbekannte ein wenig zu erschließen, muss man zunächst zusammentragen, was bereits bekannt ist. Für den hier untersuchten Sachverhalt sind mehrere Bereiche interessant. Das Hauptaugenmerk wird auf den Transportvorgängen der Medien liegen. Wesentlich ist auch die Wechselwirkung mit elektrostatischen Feldkräften sowie deren Erzeugung. Da die Fragestellung auf Vorgänge aus technischen Anwendungen oder unserer natürlichen Umgebung abzielt, muss von Mehrphasenströmungen ausgegangen werden. Hierfür werden zunächst die die Vorgänge beschreibenden Theorien vorgestellt und die für die untersuchten Fälle möglichen vereinfachenden Annahmen getroffen. 2.1 Mehrphasenströmungen Wie die Bezeichnung bereits andeutet, versteht man hierunter gemeinsame Transportvorgänge verschiedener Medien in unterschiedlichen Aggregatzuständen. Ist es schon hinlänglich kompliziert Transport- und Strömungsvorgänge eines einzelnen Mediums zu beschreiben, so treten hier noch weitere Schwierigkeiten hinzu. Bedingt durch die unterschiedlichen Eigenschaften der Phasen beeinflussen sie sich gegenseitig so stark, dass das Strömungsverhalten des einzelnen Mediums von der einphasigen Strömung deutlich unterschieden ist. Die gegenseitige Beeinflussung erfolgt im wesentlichen durch Stöße und durch Reibung. Für Veränderungen gegenüber dem einphasigen Fall sind unterschiedliche Viskositäten und Dichten verantwortlich, denn Reibung als solche tritt selbstverständlich in jedem transportierten Medium auf, sieht man vom suprafluiden Zustand des He4 ab, der sich unter anderem durch reibungsfreies Fließen auszeichnet. Die Aufgabe besteht also im ersten Schritt darin, den Transportvorgang als solchen zu beschreiben. Hier kann die Physik mit Bekanntem dienen: mit der Kontinuumsmechanik und den Navier-Stokes-Gleichungen. Obwohl nicht geschlossen lösbar, beschreiben diese durch Integration über Kräftegleichgewichte und Erhaltungssätze vollständig das Strömungsverhalten von Fluiden, also beweglichen Medien. Einzige Einschränkung ist hier der Kontinuumsansatz, mit dem implizit vorausgesetzt wird, dass das Medium innerhalb der betrachteten Größenverhältnisse gleichmäßig verteilt ist. Bei sehr verdünnten Strömungen bedarf es weiterer Annahmen. Zur Herleitung und zu den Eigenschaften der Navier-Stokes-Gleichungen findet man in den meisten Lehrbüchern der Strömunsgmechanik (beispielsweise Landau, Lifschitz [124] oder Rotta [188]) Ausführliches. Neben den analytischen Lösungen, die für einzelne Fälle unter stark vereinfachenden Annahmen (beispielsweise Potentialströmungen) bekannt sind, wurde in den letzten Jahren eine approximative Lösung der Gleichungen durch numerische Iteration immer erfolgreicher und üblicher. Es haben sich eine ganze Reihe an Methoden bewährt, die ihre jeweiligen eigenen Vorzüge und Nachteile aufweisen. Ein Überblick lässt sich der Literatur über numerische Strömungsmechanik entnehmen, beispielsweise Ferziger & Perić [62], Oertel [164] oder Peyret [174]. Grundlegend kann man in die Bilanzierungsmethoden (finite Volumen, finite Differenzen u.a.) und die Funktionalmethoden (finite Elemente, Monte Carlo u.a.) unterteilen. Während die einen über die Erfüllung der Erhaltungssätze inner- 2.2 Zweiphasenströmungen, die Gas-Feststoff-Strömung 7 halb einer elementaren Rechenzelle (Kontrollvolumen) die Integration und die Korrektur durchführen, gelangen die anderen über die sukzessive Verbesserung einer Startlösung, die in Form von Funktionswerten auf den Stützstellen vorliegt, zum Ergebnis. Gerade zur Berechnung kombinierter Probleme wie bei den Mehrphasentrömungen kommen oft auch Kombinationen mehrerer Methoden zum Einsatz. Dadurch kann die bessere numerische Stabilität des einen Verfahrens mit der höheren Genauigkeitsordnung der anderen [72, zur Definition und Problematik des Genauigkeitsbegriffes] geeignet kombiniert werden. Beispiele für das Gesagte werden in Kapitel 3.1 ff. gegeben. In Natur und Technik treten fast ausschließlich Mehrphasenströmungen auf. Bis auf wenige, unter großem Aufwand erhaltene Anwendungen, in denen eine reine“ Phase transpor” tiert wird, sind ansonsten mindestens zwei Phasen beteiligt. Meist schmuggeln“ sich im ” Laufe des Prozesses weitere Bestandteile ein“, wie beispielsweise über die Lufttemperatur ” und die Luftfeuchtigkeit die Möglichkeit der Kondensation. Der Einsatz elektrostatischer Feldkräfte erfolgt in den überwiegenden Fällen zur Trennung der Phasen. Die zu trennende Phase muß dabei entweder leicht Ladung aufnehmen können oder bereits geladen sein. Sieht man von den wenigen Fällen mit Plasmaströmungen (geladenes Fluid) ab, so bleiben als gut geeignete Anwendungen Gasströmungen mit feiner Partikelphase von bis ca. 100 µm Durchmesser. Eine detaillierte Diskussion findet sich in einem eigenen Kapitel (2.4), da die Aufladung einen wesentlichen Aspekt für die elektrostatische Einwirkung auf Mehrphasenströmungen darstellt. Eine Trennung von mehr als zwei Phasen ist zwar denkbar, erfolgt zum Teil auch ungewollt und dann meist unerwünscht wie zum Beispiel bei spontaner Tropfenbildung durch Kondensation, wird aber kaum technisch realisiert. 2.2 Zweiphasenströmungen, die Gas-Feststoff-Strömung Eine generelle Unterscheidung erfolgt bei den meisten mehrphasigen Strömungen in die kontinuierliche Phase und in eine oder mehrere diskontinuierliche Phasen, üblicherweise und im Folgenden disperse“ genannt. Die kontinuierliche Phase besteht aus einem Fluid, ” ist also entweder gasförmig oder flüssig. Für die disperse Phase lässt sich nur die Abweichung zur kontinuierlichen feststellen. Es sind alle Aggregatszustände möglich, eine Bezeichnung erfolgt daher auch meist über die Kombination der Aggregatszustände. So sind beispielsweise Flüssig-Gas-Strömungen mit Blasen durchsetzte Flüssigkeitsströmungen. Gas-flüssig steht für Tropfen in einem Gasstrom und Gas-Feststoff-Strömungen transportieren kleine Feststoffpartikel in einem Gasstrom. Diese Strömungsform ist sowohl in technischen Prozessen, als auch in der Natur sehr häufig anzutreffen. In der Technik finden wir sie bei der Feststoffverbrennung oder bei Raketenantrieben. Die pneumatische Förderung spielt eine große Rolle in der Pharmazie, bei der Lebensmittelherstellung und bei Kohle und Mineralpulvern. Fluidisierung ist die wesentliche Grundoperation der Gas-FeststoffStrömung und wird bei vielen wichtigen Prozessen der chemischen Katalyse angewendet. Gas-Feststoff-Strömungen treten bei der Gasreinigung auf, beispielsweise in Zyklonen oder Elektroabscheidern. Sehr feine Feststoffe finden Anwendung bei der Keramik- und Silikonherstellung, Plasmabeschichtung und bei der Tonertechnik. In der Natur begegnen uns die Gas-Feststoff-Strömungen typischerweise in Sandstürmen, bei Wanderdünen, Winderosionen und in kosmischen Stäuben. Eine optimierte Gestaltung der industriellen Prozesse und eine zuverlässige Einschätzung der natürlichen Vorgänge erfordern ein umfassendes Wissen über die grundlegenden Zusammenhänge dieser Strömungsform. 8 2.2.1 2 GRUNDLAGEN Die kontinuierliche, hier Gas-Phase Für die kontinuierliche Phase gelten zunächst einmal dieselben Gesetze wie für ein einphasiges Fluid. Der Einfluss der Mehrphasigkeit ist zwar im Allgemeinen deutlich in jeder Phase erkennbar, die Dynamik unterliegt jedoch selbstverständlich den gleichen Gesetzmäßigkeiten wie alle Transportprozesse. Zu lösen sind die Navier-Stokes-Gleichungen, die eine Bilanz der angreifenden Kräfte darstellen. Die Gleichungen werden nach ihren beiden Entdeckern benannt, die diese unabhängig voneinander im 19ten Jahrhundert definierten. Mit den Euler-Gleichungen waren die Bewegungsgleichungen für fließende Medien schon seit 150 Jahren bekannt. Es blieb aber bis dato die innere Reibung unberücksichtigt. Erst mit den Navier-Stokes-Gleichungen konnten turbulente Strömungsvorgänge physikalisch vollständig beschrieben werden, und sie sind heute noch die elementaren Gleichungen bei der Untersuchung reibungsbehafteter Strömungen. Die Beschreibung des Transportprozesses erhält man nur in Kombination mit einer Erhaltungsgleichung, meist der Massenerhaltung, über die sogenannte Kontinuitätsgleichung. Unter der Annahme konstanter Viskosität und eines dichtekonstanten Mediums hat die Navier-Stokes-Gleichung für die Fluidbewegung die folgende Gestalt: ρf D~u = − ∇ p + µ ∇2 ~u + ρf ~g + F~a Dt (2.1) Die Annahme der Dichtekonstanz hat zur Folge, dass der Druck p nur relativ zu einem beliebigen Bezugswert berechnet werden kann, da zu der erhaltenen Lösung beliebige, konstante Werte addiert werden können. In den Fällen, in denen diese Annahmen nicht zulässig erscheinen, weil die Strömungsbedingungen dies nicht erlauben, da beispielsweise Inkompressibilität (M a < 0, 3), aber zusätzlich eine Temperaturabhängigkeit der Dichte vorliegt, muss auf die Gleichungen und Beziehungen der theoretischen Gasdynamik zurückgegriffen werden, Zierep [233]. 2.2.2 Die disperse, hier Feststoff-Partikel-Phase Unter der dispersen Phase ist dasjenige Teilmedium einer Strömung zu verstehen, dessen Bestandteile als getrennte Einzelteile erkennbar sind, was jedoch eine anthropozentrische Klassifikation darstellt. Eine nähere Betrachtung sogenannter kontinuierlicher Phasen bringt dieselben Stoßvorgänge zwischen Molekülen zu Tage wie zwischen dispersen Partikeln. Diese Stöße sind ein bedeutender Teil der Ursache für die innere Reibung eines Fluides. Das Verhalten des Fluids wird daher auch ganz wesentlich von den Abständen dieser einzelnen Partikel“ untereinander abhängen, das heißt von der Häufigkeit der ” Wechselwirkung miteinander, woraus sich die Druckabhängigkeit der Viskosität erklärt. Die Analogie zwischen Molekül- und Partikelbewegungen gilt allerdings nicht generell: Die Schwankungsgeschwindigkeiten im molekularen Bereich werden von der thermischen (Braunschen) Bewegung dominiert. Wegen der direkten Abhängigkeit von der Stoßfrequenz klassifiziert man eine Zweiphasenströmung über die Beladung einer kontinuierlichen Phase mit der dispersen Phase. Je höher dieses Massen- oder Volumenverhältnis ist, umso größer ist die Modifikation der Strömungsverhältnisse und die Wechselwirkung zwischen den Phasen. So spricht man denn auch von verdünnter (dilute) und hochbeladener (dense) Zweiphasenströmung. Bei einer Partikelkonzentration αp > 10−5 ist der Partikeleinfluss auf die Turbulenz der Gasströmung nicht mehr vernachlässigbar [94]. 2.3 Kräfte auf Partikel 2.3 9 Kräfte auf Partikel Die Mehrphasenströmung ist mehr als die Summe ihrer Teile. Zu den Charakteristika der Einphasenströmung treten die Wechselwirkungen zwischen den Phasen hinzu. Hier tritt eine gegenseitige Beeinflussung auf, und die einwirkenden Kräfte müssen um die entsprechenden Wechselwirkungsterme ergänzt werden. Man kann sich das am pneumatischen Transport leicht veranschaulichen. Die Kopplung mit der fluiden Phase erfolgt dabei ausschließlich durch Reibung, hervorgerufen durch den Strömungswiderstand der dispersen Phase. Die zu überwindenden Trägheitskräfte beim Transport eines fluidisierten Mediums werden durch Reibung an den Oberflächen übermittelt. Die Wechselwirkung der Phasen untereinander bewirkt zunächst eine Dämpfung oder Anfachung der lokalen Geschwindigkeit und damit der Geschwindigkeitsschwankungen und des Turbulenzgrades. Die disperse Phase erfährt eine Kraft, die schwer allgemein in einer analytischen Form angegeben werden kann. Die Betrachtung eines einzelnen Bestandteils, eines Partikels, scheint daher sinnvoll. Es muss davon ausgegangen werden, dass das Partikel rotiert, beliebig geformt und geladen ist, Beschleunigung erfährt und durch Stöße einer unregelmäßigen Flugbahn mit abrupten Richtungsänderungen folgt. Eine häufige Annahme ist, dass dieses komplexe Verhalten durch eine Überlagerung von vier simplen Bewegungsformen beschreibbar sei: (1) ein Partikel mit konstanter Geschwindigkeit in einer Strömung mit homogener Geschwindigkeitsverteilung, (2) ein Partikel in beschleunigter Bewegung in derselben Strömung, (3) ein Partikel mit konstanter Geschwindigkeit in einer Strömung mit inhomogener Geschwindigkeitsverteilung, (4) ein rotierendes Partikel mit konstanter Winkelgeschwindigkeit in einer homogenen Strömung. Die aus den vier Vereinfachungen abgeleiteten Kräfte sind die Widerstandskraft (1), die Basset-Kraft (2), die Saffman-Kraft (3) und die Magnus-Kraft (4). Unberücksichtigt in dieser Vorstellung bleiben äußere Kräfte wie die Elektrostatik, die Schwerkraft oder der Magnetismus, der Strahlungsdruck u. a.. Die Gesamtkraft auf ein Partikel wird also als Summe aus Einzelkomponenten gedacht, von denen hierfür angenommen wird, dass sie voneinander unabhängig seien. Die Bewegungsgleichung für ein Einzelpartikel ergibt sich dann zu folgender Summation (Superpositionsprinzip): ~p dU = F~p = F~W + F~vm + F~Ba + F~Sa + F~M a + F~Co + F~g + F~El + F~M g + ... (2.2) dt wobei die Indizes folgende Anteile repräsentieren: W steht für Widerstand, vm für virtuelle Masse, Ba für Basset-, Sa für Saffman- und M a für Auftriebskraft durch den MagnusEffekt. Co steht für das Coulombsche Gesetz geladener Partikel und El für die Kraft eines äußeren elektrischen Feldes auf sie, g ist die Erdanziehung, M g kennzeichnet die Einwirkung durch ein magnetisches Feld. Weitere Kräfte sind bereits angedeutet, werden aber im Folgenden nicht detailliert besprochen, da sie in Anwendungen wie Strömungen mit chemischen Reaktionen oder Wärmeübergang am Einzelpartikel etc. relevant sind, die in dieser Arbeit nicht betrachtet werden. Die Kraft auf die gesamte Phase ist entsprechend die Summe der einzelnen Partikelkräfte F~p . Die Kräfte werden meist anhand ihrer Stärke oder Bedeutung geordnet. In dieser Diskussion soll ihre Wirkungsweise im Vordergrund stehen. Sie werden daher im Folgenden nach ihren Mechanismen gruppiert. Krafteinwirkungen können dabei über das umliegende Fluid, die sogenannten hydrodynamischen Kräfte, durch Wechselwirkung mit benachbarten Partikeln und durch andere, äußere, das heißt nicht mittelbar zur Strömung gehörende Kräfte und Felder erfolgen. mp 10 2 GRUNDLAGEN Vernachlässigt ist in dieser Diskussion der Wandeinfluss auf die Strömung, da bei den Anwendungen in dieser Arbeit von freien Strömungen ausgegangen werden kann und es für die Partikelphase bei Wandkontakt zur Deposition kommt. Ebenfalls nicht diskutiert wird die Bildkraft, die in Wandnähe zu einer erhöhten Beschleunigung in Wandrichtung führt, die allerdings, bedingt durch die reziproke Proportionalität zum Quadrat des doppelten Abstandes, erst für sehr kleine Abstände wirksam wird. Matsuyama et al. [146] geben eine analytische Lösung zur Berechnung der Bildkraft mit Hilfe der Polynomialzerlegung in Legendre-Polynome an. 2.3.1 Hydrodynamische Kräfte Die Widerstandskraft Die Widerstandskraft ist in den meisten Fällen die dominierende Kraft auf ein Teilchen in einer Strömung. Eine Kraftübertragung erfolgt durch die Umströmung des Partikels. Ein wesentlicher Proportionalitätsfaktor ist erwartungsgemäß die Relativgeschwindigkeit des Partikels zum es umgebenden Fluid. Die Verhältnisse bei dieser Umströmung bestimmen daher ganz wesentlich die Widerstandskraft. Um diesen unterschiedlichen Abhängigkeiten mit dimensionslosen Beiwerten Rechnung tragen zu können, zerlegt man die Widerstandskraft in zwei Anteile: den Formwiderstand, Beiwert cw , und den Reibungswiderstand, der von der Oberflächenbeschaffenheit der Partikel und der Umströmungsgeschwindigkeit abhängig ist. Im Stokesschen Bereich haben sie einen Anteil am Gesamtwiderstand von 1/3 bzw. 2/3. Vollständig berechnen lässt sich die Widerstandskraft durch Integration der Reibungs- und Druckkräfte über die Teilchenoberfläche. Zur Klassifikation der Umströmungszustände wird üblicherweise die Partikelreynoldszahl Rep herangezogen, die wie die Reynoldszahl eines frei umströmten Körpers definiert ist, wobei der Partikeldurchmesser die charakteristische Lauflänge bildet und die Relativgeschwindigkeit zur Anströmgeschwindigkeit wird. Über diese Kennzahl werden die verschiedenen Strömungszustände unterschieden. Eine Partikelreynoldszahl Rep < 0.25 kennzeichnet den Stokes-Bereich, für den eine schleichende Umströmung der gesamten Partikeloberfläche charakteristisch ist. Die Widerstandskraft für diesen Bereich errechnet sich zu: F R F~W = F~W + F~W ~ rel ~ rel = 18 mp µf U = 3π µf Dp U ρp Dp2 (2.3) Der Widerstandsbeiwert für den Stokesschen Bereich bestimmt sich hieraus zu cw = 24/Rep . Der Widerstandsbeiwert hängt von sehr vielen Faktoren ab, wobei die Reynoldszahl für die vorliegenden Betrachtungen von größtem Belang ist. Nimmt die Reynoldszahl zu, so steigt cw im Vergleich zum cw -Wert im Stokesschen Bereich. Steigt die Reynoldszahl weiter, so bilden sich Wirbel hinter der Kugel. Damit ändert sich die Druckverteilung an der Kugeloberfläche und der Formwiderstand erhöht sich. Eine geschlossene analytische Lösung für die Widerstandskraft steht dann nicht mehr zur Verfügung. Für diese Bereiche bewährt sich die Definition von Beiwerten, die sich aus experimentellen Daten bestimmen lassen. Die Widerstandskraft wird mit Einführung des Beiwertes cw zu: ρf 3 ρ ~ rel |U ~ rel | F~W = mp p cw U 4 Dp (2.4) 2.3 Kräfte auf Partikel 11 bzw. unter Verwendung der Partikel-Reynoldszahl Rep zu: 3 µf ~ rel F~W = mp cw Rep U 4 ρp Dp2 (2.5) Mit der auf höhere Reynoldszahlen angepassten Partikelrelaxationszeit ρp Dp2 24 τp = 18µf cw Rep (2.6) (der rechte Term von Gl. 2.6 erfasst diese Anpassung mit Hilfe des Widerstandsbeiwertes und wird im Fall Rep < 1 zu 1 ⇒ Übergang zu Gl. 2.3) lässt sich die Widerstandskraft stark verkürzt darstellen: ~ rel U F~W = (2.7) τp Sehr wohl gibt es die Möglichkeit analytischer Näherungslösungen der Navier-StokesGleichungen und der Partikelbewegungen für den Stokesschen Bereich. Gemessen werden sie an der Übereinstimmung mit dem Experiment. Eine Vielzahl von Messungen verschiedener Autoren sind in das bekannte Diagramm von Schlichting [193, Seite 40] zur experimentell ermittelten Beziehung zwischen Widerstandsbeiwert und Reynoldszahl eingeflossen. Annähernd ebenso viele Beziehungen zur formelmäßigen Beschreibung sind von unterschiedlichen Autoren vorgeschlagen worden. Zu einer Diskussion der unterschiedlichen Ansätze und dem Vergleich zu den empirischen Approximationsformeln siehe Schmidt und Müller [197]. Die wohl meist zitierte analytische Lösung jüngeren Datums stammt von Hinds [82]. Seine Weiterentwicklung der Oseenschen Formel beschreibt den Widerstandsbeiwert im sogenannten Übergangsbereich: Re2/3 24 · 1+ p cw (Re) = Rep 6 3 < Rep < 400 (2.8) mit einer maximal 2%-igen Abweichung von experimentellen Daten im angegebenen Gültigkeitsintervall. Für Abschätzungen bis Re = 1000 bleibt der Fehler unter 10% und die Gleichung 2.8 hat für die meisten Modellierungen eine ausreichende Genauigkeit. Im Newtonschen Bereich (ca. 800 < Rep < 3.5 · 105 = kritische Reynoldszahl) spielt der Anteil der Reibung kaum noch eine Rolle und es liegt ein nahezu konstanter Widerstandsbeiwert von cw = 0.44 (±13%) vor. Höhere Reynoldszahlen treten bei partikelbeladenen Strömungen und deren Berechnung äußerst selten auf. Die virtuelle Masse Bei der Beschleunigung eines Teilchens wird auch das Fluid in der direkten Umgebung des Teilchens mitbeschleunigt, so dass sich eine zusätzliche träge Masse ergibt. Dieser Term wird dem Formwiderstand zugezählt und ist proportional zum ρ Dichteverhältnis ρfp . Die effektive Masse eines Teilchens erscheint größer als die reale, der ρ Zuwachs ist allerdings für große Dichteverhältnisse ρfp gering. Über die Betrachtung der kinetischen Energie des umgebenden Fluids und entsprechende Integration (s. z.B. Crowe, 12 2 GRUNDLAGEN Sommerfeld und Tsuji [44]) erhält man für die Kraft durch die virtuelle Masse die folgende Beziehung: à ! ρ D~ u ∂~ u f f p F~vm = mp cvm − (2.9) ρp Dt ∂t Der Koeffizient cvm wurde eingeführt, um die Gültigkeit der Beziehung auch für höhere Reynoldszahlen zu erweitern. Nach Odar & Hamilton [163] läßt sich cvm in Abhängigkeit von der Partikel-Reynoldszahl ReP und der Beschleunigungszahl Ac bestimmen. Neuere Veröffentlichungen (z.B. Magnaudet [142]) nennen cvm = 0.5, unabhängig von ReP und Ac, die bessere Variante. Bei den durchgeführten Berechnungen wurde daher cvm = 0.5 verwendet. Die Basset-History-Kraft Die Basset-Kraft, oder auch das Basset history integral“ ” berücksichtigt die Veränderung des momentanen Widerstandes durch zuvor erfolgte Beschleunigungsvorgänge. Die Basset-Kraft ist vernachlässigbar, wenn das Dichteverhältnis ρf wie bei den vorliegenden Gas-Feststoff-Strömungen sehr klein wird. ρp Die Magnus-Kraft Die zuerst von Magnus beschriebene Kraft ergibt sich durch die Eigenrotation eines Teilchens. Durch die Rotation stellt sich aufgrund der daraus resultierenden Relativgeschwindigkeiten an der Teilchenoberfläche eine ungleichmäßige Druckverteilung über die Oberfläche ein. Dadurch erhält man eine Querkraft/Auftriebskraft, die im allgemeinen als Magnus-Effekt bezeichnet wird. Rubinow und Keller [189] geben für die Magnus-Kraft folgende Relation an: i ~ rel | h |U π ~ rel × Ω ~ rel U F~M = Dp2 cM a ~ rel | 8 |Ω (2.10) Man erkennt hier die Proportionalität zur Partikeloberfläche, wonach zu erwarten ist, dass die Magnus-Kraft für kleine Partikeldurchmesser von untergeordnetem Einfluss ist, wie auch in Arbeiten von Magnaudet [142] oder den numerischen Untersuchungen von Cherukat [32] bestätigt wird. Kraft durch Druckgradienten Aus einem Druckgradienten in der Strömung resultiert eine weitere Kraft auf das Teilchen. Mit der Annahme eines konstanten Druckgradienten in der Partikelumgebung ergibt sich durch Integration über die Teilchenoberfläche: F~p = −∇p mp /ρp (2.11) Betrachtet man die Navier-Stokes-Gleichung für den Fall eines Newtonschen Fluids D~uf = −∇p + µf ∇2~uf + ρf ~g Dt so lässt sich der Druckgradient wie folgt ausdrücken: ρf (2.12) D~uf − µf ∇2~uf − ρf ~g (2.13) Dt Unter Annahme einer konstanten Scherung über der Teilchenoberfläche wird der Term µf ∇2~uf zu Null und es ergibt sich für die Kraft durch den Druckgradienten: −∇p = ρf ρf D~uf ρf F~p = mp − mp ~g ρp Dt ρp (2.14) 2.3 Kräfte auf Partikel 13 ρ Die Bedeutung der Kraft ist somit direkt proportional zum Dichteverhältnis ρfp und steigt mit zunehmendem Druckgradienten. Häufig werden die beiden Teilterme getrennt voneinander betrachtet und der erste Term als Druckkraft, der zweite als Auftriebskraft bezeichnet. Die Auftriebskraft wird dann meistens mit der Gewichtskraft zusammengefasst. Die Saffman-Kraft Befindet sich ein Teilchen in einer Scherströmung, so stellt sich eine ungleichmäßige Druckverteilung über die Teilchenoberfläche ein und es resultiert eine Querkraft senkrecht zur Strömungsrichtung in Richtung der größeren Relativgeschwindig~ r . Mei [153] gibt für diese Querkraft an: keit U h 2√ F~S = 1.615 Dp 2.3.2 ~r × ω U ~F ρf µf cs q |ω ~F | i (2.15) Kräfte zwischen den Partikeln Stöße Diese werden durch eine Gleichung für die Stoßhäufigkeit, die Stoßwahrscheinlichkeit und die Stoßfrequenz dargestellt. Wesentlich ist hierbei sicherlich die Breite der Geschwindigkeitsverteilung und der Partikelgrößenverteilung, damit es überhaupt zu Stößen kommt und damit diese eine nachhaltige Änderung der Flugbahn und -geschwindigkeit zur Folge haben. Dieser Effekt wird in deutlicherem Maße durch Wandstöße bewirkt (Sommerfeld et al. [119]), deren Theorie und Möglichkeiten der numerischen Modellierung ausführlich von Sommerfeld [205] beschrieben wurden. Aufgrund der Bedingungen in den vorliegenden Anwendungen und Testfällen bedarf es keiner Berücksichtigung der Stöße in dieser Arbeit. Die Coulomb-Kraft Nach ihrem Entdecker benannt, drückt diese Kraft die Anziehung oder Abstoßung geladener Teilchen untereinander aus. Sie folgt der bekannten 1/r2 Gesetzmäßigkeit, die die Proportionalität zur Oberfläche einer gedachten umhüllenden Kugelschale erkennen lässt. Die Kraft wird folgendermaßen beschrieben: F~Co = q1 · q2 1 · 4 π ²0 | ~r1,2 | · ~r1,2 (2.16) Die Van-der-Waals-Kraft Dabei handelt es sich um eine ursprünglich von van der Waals als Erklärung für die Nichtexistenz idealer Gase postulierte Kraft, die auf DipolDipol-Wechselwirkung zwischen Atomen oder Molekülen beruht. Für kleine Partikel wurde dieser Gedanke erweitert, indem der Proportionalitätsfaktor zwischen Kraft und Radius (Hamaker-Koeffizient) von Lifshitz geeigent umdefiniert wurde. Die Gleichung für die resultierende Lifshitz-van-der-Waals- Konstante“ ist leider nicht trivial lösbar, es sind ” allerdings einige Näherungen bekannt. Eine Diskussion zu dem Koeffizienten und seiner näherunsgweisen Bestimmung findet sich bei Landau-Lifshitz [123]. Grundsätzlich handelt es sich hier um eine sehr kurzreichweitige Wechselwirkung, die beispielsweise Ursache für das Phänomen ist, dass nach einem erfolgten Stoß die beteiligten Partikel gemeinsam ihre Bewegung fortsetzen. Diese Kraft muss lediglich berücksichtigt werden, wenn bei Stößen die Möglichkeit der Agglomeration gegeben ist. 14 2.3.3 2 GRUNDLAGEN Die Kräfte durch äußere Felder Hierunter sollen Kraftfelder verstanden werden, die nicht direkt an die Strömung gekoppelt sind. Die Kraftquellen vollführen Bewegungen, die von der des Fluids und vom Strömungszustand unabhängig sind. Die Schwerkraft Sie ergibt sich durch die Gravitationsbeschleunigung ~g und hat die folgende Form: F~g = mp · ~g (2.17) Die elektrostatische Feldkraft Ein Partikel mit einer konstanten Ladung, das in ein elektrisches Feld gebracht wird, erfährt eine Ablenkung durch die Feldkraft (Coulombsches Gesetz): ~ [Joules/cm] F~El = qp · E (2.18) Um eine der Gravitation analoge Beschleunigung zu erhalten, kann durch die zugehörige Masse dividiert werden: qp F~El ~ = ~ael = ·E (2.19) mp mp Die lineare Abhängigkeit dieser Kraft von der Partikelladung ist die Ursache für das Interesse an den Auf- und Entladungsprozessen von Partikeln. Wegen ihrer Schlüsselrolle bei der Wechselwirkung von elektrischen Feldern mit der dispersen Phase wird der Aufladung ein eigenes Kapitel (2.4) gewidmet. Der Magnetismus Ihm liegen ähnliche Vorgänge zugrunde wie der elektrostatischen Feldkraft. Die Gleichung für die Kraft hat formal dieselbe Gestalt: ~ F~M g = mmg µr · B (2.20) Hier steht mmg für die Magnetisierung oder das magnetische Moment des Partikels entsprechend der Anzahl parallel ausgerichteter magnetischer Nordpole. Starke magnetische Felder werden meist über Wechselströme mit hoher Spannung erzeugt. Oft handelt es sich um eine Koexistenz der beiden Effekte. Da in der Natur magnetische Monopole unbekannt sind, kann ein magnetisches Moment nur durch Ausrichtung von Polen im Partikel entstehen. Hierzu muss das Material des Partikels entweder ein guter Leiter sein oder die Eigenschaften eines Permanentmagneten haben. In den hier betrachteten Fällen liegen elektrostatische Felder vor, so dass die magnetische Feldkraft einen sehr geringen Anteil an der Gesamtkraft hat und somit unberücksichtigt bleiben kann. 2.3.4 Größenverhältnisse der Kraftterme Wie die bisher diskutierten Abhängigkeiten und Proportionalitäten der einzelnen Kräfte erkennen lassen, sind allgemeingültige Angaben über die Dominanz der einen oder anderen Komponente kaum möglich. Es müssen daher unterschiedliche Fallbetrachtungen angestellt werden. Zunächst werden die Kräfte über einen weiten Größenbereich der sie bestimmenden Variablen dargestellt. Dabei können der generelle Verlauf und die theoretischen Maximal- und Minimalwerte angegeben werden. Eine detaillierte Diskussion im Vergleich untereinander erfolgt dann anhand der für die in dieser Arbeit betrachteten Testfälle typischen Randwerte für Geschwindigkeiten, Feldstärken und Partikelgrößen. Kraft [ kg m / s 2 ] 2.3 Kräfte auf Partikel 15 3,5x10 -10 3,0x10 -10 2,5x10 -10 2,0x10 -10 1,5x10 -10 1,0x10 -10 5,0x10 -11 Widerstand, Stokes (0.15 m/s U elektr. (max. Ladung (Gl. 2.24)) 3 Gravitation (rho=1800 g/m ) rel ) E = 400 kV/m 0,0 0 2 4 6 8 10 12 14 Partikeldurchmesser [µm] Abbildung 2.1: Vergleich der Kraftkomponenten bei Partikeln unter 10 µm und der Dichte der verwendeten Glaskugeln (Ballotini 5000) im Versuchselektroabscheider. In einem ersten Schritt sollen die Anteile verworfen werden, die hinlänglich klein sind, um mit vertretbarem Fehler vernachlässigt werden zu können. Bei den hydrodynamischen Kräften gehören hierzu die Magnus-Kraft wegen der vorliegenden Partikelgrößen, siehe die numerischen Untersuchungen von Cherukat [32], die die Auftriebskraft mit und ohne Partikelrotation verglichen haben. Ausserdem wegen der Proportionalität zum Verhältnis der Dichte des Fluids zu der der Partikel die Druckkraft und die Basset-History-Kraft sowie die Kraft der virtuellen Masse. Die Saffman-Kraft wurde berücksichtigt, obwohl Bereiche mit großen Schergradienten in den vorliegenden Strömungen nur sehr vereinzelt zu erwarten sind, vorwiegend am Rand des Freistrahles bei der Düsenströmung der Lackierpistole. Im Weiteren sind die Kräfte, die typischerweise in hochbeladenen Zweiphasenströmungen auftreten, zu vernachlässigen, da solche Strömungen hier nicht betrachtet zu werden brauchen. Hierunter fallen die Kräfte zwischen den Partikel, i.e. van-der-Waals-Kräfte, Stöße und die Coulomb-Kraft. Da weder die Partikel magnetisch sind, noch ein entsprechendes Feld auftritt, braucht der Magnetismus ebenfalls nicht berücksichtigt zu werden. Die verbleibenden Kraftanteile bestehen aus der elektrischen Feldkraft, der Widerstandskraft und der Schwerkraft, die einzeln und im Zusammenwirken richtig und vollständig bestimmt werden müssen. Die Relativgesschwindigkeit stellt sich natürlich immer so ein, dass die Widerstandskraft im Gleichgewicht mit der Summe der übrigen angreifenden Kräfte ist. In Abbildung 2.1 wird der Größenbereich bis 10 µm betrachtet, eine Größenverteilung, die üblicherweise in der Abgasreinigung und in der Tonertechnik auftritt. Die Relativgeschwindigkeit wurde so gewählt, dass bei den größten hier zu betrachtenden Partikeln (120 µm) eine Partikelreynoldszahl von 1 und damit noch der Stokes’sche Bereich gilt. Hier ist selbst bei niedriger Relativgeschwindigkeit der geringe Einfluss der Schwerkraft auffällig. Er ist Ursache für das nebelbildende Schweben feiner Stäube und 16 2 GRUNDLAGEN 2,0x10 -8 1,6x10 -8 1,2x10 -8 elektrostatisch (10 % Pauthenier (Gl. 2.24)) elektrostatisch (gem. Ladungsmenge) Widerstand, Stokes (0.15 m/s U rel ) Kraft [ kg m / s 2 ] Gravitation (rho=2200 kg/m 3 ) E = 400 kV/m 8,0x10 -9 4,0x10 -9 0,0 0 20 40 60 80 100 120 140 Partikeldurchmesser [µm] Abbildung 2.2: Vergleich der Kraftkomponenten bei Partikeln bis 120 µm und Werten für die Dichte und die Ladungsmenge, wie sie bei der Pulverlackierung auftreten. Rauchpartikel. Die elektrostatische Feldkraft bei Sättigungsladung ist für kleine Partikel sehr ausgeprägt. In dem Größenbereich unter 1 µm wird die Ladungsmenge durch Berücksichtigung der Diffusionsladung noch etwas erhöht. Für größere Partikel und damit bei einer breiteren Größenverteilung, wie sie typisch für Pulverlack ist, sieht es etwas anders aus. In Abbildung 2.2 sind die Verhältnisse für den hier vorliegenden Partikelgrößenbereich wiedergegeben. Wegen der Proportionalität zum Volumen wächst die Schwerkraft schnell an. Ab einer Partikelgröße von ca. 50 µm verlieren die Partikel allmählich ihre Fähigkeit ideal der Strömung zu folgen. Der Einfluss der elektrostatischen Feldkraft wäre ebenfalls sehr ausgeprägt, würden die Partikel auch in diesem Größenbereich mit der Grenzladung geladen. Hier wiedergegeben sind zum einen die Kräfte bei 10 % der Sättigungsladung und mit den gemessenen Ladungswerten. 2.4 Die Partikelladung und die Dynamik des Aufladevorgangs Die Partikelladung wurde schon frühzeitig als eine bedeutende Größe für die Beeinflussung der dispersen Phase erkannt, ist die elektrostatische Kraft auf ein Partikel doch linear proportional zu ihr. Aus der Natur sind mehrere Mechanismen bekannt, durch die Ladung in Festkörper oder auf deren Oberfläche gebracht wird. Am häufigsten geschieht dies auf natürliche Weise durch Kontaktflächen und durch Reibung. Diese Form der Aufladung durch Oberflächenkontakt von Medien mit unterschiedlichen Fermi-Niveaus wird in den technischen Anwendungen als Triboladung bezeichnet. Ein mögliches Modell für die Triboladung wurde von Greason [74] vorgestellt, indem er einen einfachen Modellansatz aus einem typischen experimentellen Aufbau zur Bestimmung des Triboverhaltens gewinnt. In technischen Anwendungen wird der Aufladung durch Ionen (Feldaufladung) meist der Vorzug gegeben, da der Prozess und die Ladungsmenge bei dieser Methode in Grenzen kontrollier- und steuerbar sind. Die Ionen werden meist in einem vorbestimmten Gebiet durch Glimmentladung (Korona) erzeugt, der Grad der Aufladung ist gut über die Anzahl 2.4 Die Partikelladung und die Dynamik des Aufladevorgangs 17 der Ionen und die Ausdehnung des Ortes ihres Auftretens einstellbar. Die Kontakt- und Triboladung bietet, wie im folgenden Abschnitt dargestellt, hier kaum eine Möglichkeit kontrollierend einzugreifen. 2.4.1 Kontakt- und Triboladung Werden die Oberflächen zweier unterschiedlicher und isolierender Materialien aneinander gerieben und dann getrennt, so verbleibt eine dauerhafte Ladungstrennung. Für viele Materialien genügt es bereits einen Kontakt der Oberflächen herzustellen. Man spricht hier von der Kontaktladung, die durch unterschiedliche Energieniveaus (Fermi-Niveaus) der Elektronenzustände in den Molekülen und Atomen der Oberfläche und deren spontanen Ausgleich entsteht. Bei der Triboladung sind hingegen beide Polaritäten auf den Oberflächen anzutreffen, wobei jeweils eine überwiegt und so die Polarität der Triboladung der Oberfläche bestimmt. An diesem Vorgang sind im Mittel acht von einer Million Atome / Moleküle beteiligt. Diese geringe Anzahl ist ausreichend für eine deutliche Veränderung der elektrischen Eigenschaften der Oberfläche. Bei Untersuchungen der Triboladung isolierender Materialien auf metallischer Oberfläche wurde ein linearer Zusammenhang zwischen Ladungsaustausch und Fermi-Potentialdifferenz gefunden, der auf eine hauptsächliche Beteiligung von Elektronen an der Ladungstrennung schließen lässt. Die üblichen Experimente zur Kontaktladung beruhen auf einem einmaligen Kontakt in evakuierter Umgebung, um spätere Entladungen an Gasionen zu vermeiden. Es ist schon lange bekannt, dass derselbe Effekt der Ladungstrennung durch Reibung von Oberflächen selbst gleicher Materialien erreicht werden kann. Bei gleichen Materialien ist die Polarität von der unterschiedlichen Gestaltung der Oberfläche, kantig oder glatt, abhängig. Eine mögliche Erklärung ist die lokale Erwärmung, die eine Verschiebung der Fermi-Niveaus bewirken kann. Dabei wurde mehrfach beobachtet, dass die verbleibende Ladungsmenge von der eingebrachten Reibungsenergie und weniger von den verwendeten Materialien abhängig ist (Haenen [77]: qp ∼ FRα ). Eine strikte inhaltliche Trennung der Kontaktladung und der Triboladung ist wegen dieser Abhängigkeit von mechanischem Einwirken erforderlich. Oberflächenladung tritt häufiger und ausgeprägter in atmosphärischer Umgebung als im Vakuum auf. Bei Trennung der Oberflächen kommt es meist zu Ionisationen umliegender Gasmoleküle und zu Entladungen mit Überschlägen zwischen benachbarten Oberflächen, die diese zunächst einmal teilweise entladen. Dieser Vorgang erfolgt dabei bisweilen mit einer solchen Heftigkeit, dass in seiner Folge die Oberflächen ähnlich einem Überschwingen wieder mit entgegengesetzter Polarität geladen werden. Die atmosphärische Umgebung begrenzt zugleich die mögliche Ladungsmenge auf dispersen Partikeloberflächen. Hier gilt das Gaußsche Limit, bei dem die umliegende Luft ionisiert wird. Bei üblichen Triboprozessen wird diese Grenze häufig erreicht. Es kann gezeigt werden [42, §1.5 und §7.1.5], dass dieses Limit für die Ladung auf einer Oberfläche bei 2.64·10−5 C m−2 liegt. Die beständige Ladung auf dispersen Partikeln wird deutlich geringer sein, da die resultierende Feldstärke aus dieser Ladungswolke lokal schnell die Durchbruchsfeldstärke der Luft übersteigt. Beim pneumatischen Transport durch ein Rohr beispielsweise wird die Feldstärke auf der Rohrwand den begrenzenden Faktor für die Partiklelladung darstellen. Die Grenzladung kann mit Hilfe des Satz von Gauß abgeschätzt werden [42]. Unter der Annahme der Partikelströmung von n kg Pulver pro Kubikmeter Luft in einem Stück Rohr der Länge L und dem Durchmesser 2R ergibt sich folgender Zusammenhang: 18 2 GRUNDLAGEN Die Raumladungsdichte bei einem Ladungs-Massenverhältnis q/m der Partikel ergibt sich zu: ρip = n q/m [C m−3 ] (2.21) Mit der Homogenität des Feldes auf der Wand lässt sich das Gaußsche Gesetz wie folgt schreiben: ~ · O = ρip V / ²0 = n q V / m ²0 E (2.22) ~ b zurückDie theoretisch maximale Ladung lässt sich nun aus der Durchbruchsfeldstärke E rechnen. Mit O = 2 π R L als Rohroberfläche und dem zugehörigen Volumen V = π R2 L erhält man: ~b 2 ²0 E (q / m)max = (2.23) n·R Die Durchbruchsfeldstärke auf der Rohroberfläche ist damit der begrenzende Faktor, da sie, solange 2rρp / 3nR < 1 erfüllt ist, eher eintritt als die maximale Partikelladung. Eine hohe Triboladung wird folglich nur mit Partikelströmungen geringer Beladung und in Rohren kleiner Radien erreicht. 2.4.2 Die Koronaladung Um eine Oberfläche aufzuladen wird meistens eine Korona verwendet, da die Triboladung kaum vorausbestimmbar und schwer zu kontrollieren ist. Eine Koronaentladung tritt auf, wenn zwischen Elektroden, von denen mindestens eine kleine Krümmungsradien aufweist, eine Hochspannung angelegt wird. Hierbei entsteht ein stark inhomogenes elektrisches Feld. In den Bereichen hoher Feldstärke, die sich in der nahen Umgebung der starken Krümmungen ergeben, wird eine Leuchterscheinung beobachtet, die dieser Entladungsform ihren Namen gibt. Dieses schwache, bläuliche Leuchten kommt durch Ionisationsstöße an den Gasmolekülen und -atomen durch beschleunigte Elektronen zustande. Hierbei entstehen Ionenpaare, einzelne Elektronen und positiv geladene Atome und Moleküle. Die freigesetzten Elektronen werden ebenfalls beschleunigt und erzeugen so kaskadenartig weitere freie Elektronen. Außerhalb des Bereichs hoher Feldstärke reicht die Beschleunigung nicht mehr zur Ionisation aus und die Elektronen tendieren dazu, sich an neutrale Atome oder Moleküle anzulagern. Dadurch erfahren diese eine Beschleunigung durch das Feld in Richtung zu den Elektroden hin. Neutrale Atome werden durch Stöße auch aus ihrer Ruhebewegung abgelenkt. Außer in der Koronazone bewegen sich die Ionen im überwiegenden Bereich zwischen den Elektroden mit relativ geringer Geschwindigkeit zur flacheren Elektrode hin. Diese Drift der geladenen und ungeladenen Gaspartikel wird als Ionenwind bezeichnet. Die Korona ist nicht unabhängig von der vorliegenden Polarität, da sich die positiven und negativen Ladungsträger stark unterscheiden. Bei negativer Korona werden die Elektronen von der spitzen Elektrode weg in den Bereich schwächerer Feldstärke beschleunigt. Die positiven Ionen erzeugen beim Aufschlagen auf die Elektrodenoberfläche weitere Elektronen. Zusätzlich tritt Photoionisation auf. Die Leuchterscheinung längs der Oberfläche einer negativen Korona ist daher ausgefranst und unregelmäßig und weiter ausgedehnt als bei der positiven Korona, wo die Elektronen in die Korona-Zone hinein beschleunigt werden. Die Stoßionisationen sind dadurch auf einen kleinen räumlichen Bereich 2.4 Die Partikelladung und die Dynamik des Aufladevorgangs 19 beschränkt, und die Koronazone erhält eine ebenmäßige Oberfläche. Die positiven Ionen erhalten in keinem der Fälle ausreichend kinetische Energie, um ionisierend zu wirken. Die Durchbruchsfeldstärke und lokale Entladungen werden bei positiver Korona mit geringeren Spannungen erreicht, weshalb in den meisten Fällen die negative Korona verwendet wird. In manchen Anwendungen (z.B. Raumluftklima) ist sie allerdings unerwünscht, da mit ihr eine Ozonbildung (O2− 3 ) einhergeht. Zusammenfassend kann die Koronaentladung als ein sehr kleiner Bereich um eine Elektrode mit kleinem Krümmungsradius mit Ionen beider Polaritäten und einem überwiegenden Feldbereich mit driftenden Ionen der Polarität der spitzen“ Elektrode angesehen werden. Diese Betrachtung ist sicherlich ver” einfacht, aber in den meisten Fällen ausreichend, um die Vorgänge zu beschreiben. Ein Partikel, das sich in einem homogenen Feld befindet, wird das Feld lokal stören, da OL Abbildung 2.3: Schematische Darstellung der Krümmung eines homogenen Feldes in der Nähe einer Oberfläche mit abweichendem ²r , links ungeladen, rechts geladene Partikeloberfläche. Die aufladbare Fläche OL reduziert sich kontinuierlich mit steigender Aufladung. es eine andere Dielektrizitätskonstante als das umliegende Gas (²r (P ) À ²r (Luf t) ≈ 1) aufweist und als Dielektrikum wirkt (Abb. 2.3). Durch diese lokale Feldkrümmung wird die Ladung auf der Oberfläche so verschoben, dass das Partikel polarisiert wird. Die gekrümmten Feldlinien begünstigen zusätzlich eine Anlagerung von Ladungsträgern auf der Oberfläche. Durch die allmähliche Aufladung verschieben sich die Feldlinien weiter und es bleibt eine immer kleinere Fläche, die Ionen anzieht. Bei einem wechselnden Feld kann das Partikel auf diese Weise entladen werden, da plötzlich fast die ganze Partikeloberfläche die entgegengesetzt geladenen Ionen anzieht. Zu Neutralität führt dieser Vorgang allerdings nur, wenn die Ladungsträger beider Polaritäten dieselbe Beweglichkeit b aufweisen, sonst erfolgt auch im Wechselfeld eine Aufladung mit der Polarität der beweglicheren Ladungsträger. In einem einfach ionisierten Feld, wie dem der Gleichstrom-Koronaentladung lässt sich durch obige Überlegungen eine Grenzladung bestimmen. Hierbei wird das Gleichgewicht aus Anziehungskraft der Oberfläche auf die Ionen und Abstoßung durch allmählich wachsende Aufladung der Oberfläche betrachtet. Dieser Ansatz wurde zuerst von Pauthenier und Moreau-Hanot [170] veröffentlicht. Man spricht daher auch vom Pauthenier-Limit als der Sättigungsladung und nennt diese Form der Partikelaufladung Pauthenier-Ladung. 20 2 GRUNDLAGEN Die Sättigungsladung berechnet sich aus: ~ | qs = 4 π ² 0 r 2 p | E (2.24) wobei p für den Quotienten 3 ²r / (²r + 2) steht. p variiert zwischen 3 für leitende Materialien (relative Dielektrizitätskonstante ∞) und 1 für einen Isolator mit Dielektrizitätskonstante 1. Wie man an Gleichung 2.24 erkennt, ist die Sättigungsladung proportional zur Feldstärke des umliegenden Feldes und zur Oberfläche des Partikels. Außerdem hängt sie schwach von der Dielektrizitätskonstante des vorliegenden Materials ab, ist aber unabhängig von der Raumladungsdichte. Zevenhoven [229] weist auf einen Widerspruch in diesem Ansatz für dielektrische Medien hin, da die Dielektrizität zwar bei der Krümmung des umliegenden Feldes berücksichtigt wird, nicht aber bei der Bestimmung der Ladungsverteilung auf der Partikeloberfläche, die als gleichverteilt wie bei leitenden Materialien angenommen wird. Zur Diskussion des aus der ungleichmäßigen Oberflächenladung resultierenden Drehmoments und Rotation des Partikels siehe ebenfalls [229]. Zu Bedenken ist allerdings, dass dispergierte Partikel in einer Luftströmung ohnehin rotieren und dadurch eine gleichmäßige Aufladung gewährleistet wird. Die Raumladungsdichte hat nur Einfluss auf die Ladungszeit, innerhalb derer die Sättigungsladung erreicht wird. Die Ladung auf einem Partikel zu einem beliebigen Zeitpunkt lässt sich nach Pauthenier folgendermaßen berechnen: q(t) = qs [1 / (1 + τ /t)], τ = 4 ²0 / N0 eb (2.25) N0 ist hierbei die Ionendichte [m−3 ], e die Elementarladung (1,61 10−19 [C]) und b die Io~ In Größen des elektrischen Feldes ausgedrückt nenbeweglichkeit, definiert durch b = ~ui /E. gilt für τ : ~ / J~ τ = 4 ²0 E (2.26) Für typische Korona-Entladungen (b = 10−4 m/s V , N0 = 1015 Ionen/m3 ) ergeben sich für τ etwa 0,00022 Sekunden und für das Erreichen von 90% der Sättigugsladung Zeiten von ca. 0,02 Sekunden. Zusammen mit diesem, Feldaufladung genannten, Vorgang tritt die Diffusionsladung auf. Hier erfolgt die Aufladung durch die thermische Bewegung der Ladungsträger und über dadurch erfolgte Stöße. Die Feldaufladung oder Pauthenier-Ladung ist proportional zum Quadrat des Partikeldurchmessers. Für sehr kleine Partikel unterhalb etwa 1 µm wird die Feldaufladung ziemlich gering. Diese Partikel tragen dennoch eine nicht vernachlässigbare Ladungsmenge, hierfür wird die Diffusionsaufladung verantwortlich gemacht. Eine einfache Abschätzung der erreichten Aufladung lässt sich mit Hilfe der kinetischen Gastheorie angeben: (4 π ²0 r k T ) r N0 q 2 ~ui t q(t) = ln ( + 1) (2.27) e 4 ²0 r K T Diese Gleichung gilt für ein ruhendes Partikel. Es gibt für diesen Vorgang keine maximale Ladung, da, wenn auch mit verschwindend geringer Wahrscheinlichkeit, immer ein Ion auftreten kann, das die Barriere des Gegenfeldes auf der Partikeloberfläche zu überwinden vermag. Für Partikelgrößen zwischen 0,4 und 1,5 µm sind beide Aufladungsvorgänge bedeutend, auch wenn die Pauthenierladung meist überwiegt. Dieser Größenbereich wird in der Literatur allgemein akzeptiert. Allerdings weisen Fjeld et al. [65] auf Messungen hin, die einen Einfluss bis in die Größenordnung von 10 und mehr µm nachweisen. Der Fehler 2.4 Die Partikelladung und die Dynamik des Aufladevorgangs 21 bei der Annahme reiner Feldaufladung für Partikel größer 1 µm ist in jedem Fall sehr klein. Die Berücksichtigung der Diffusionsladung in der Gleichung 2.25 durch einen Korrekturfaktor1 , wie von Cochet [36] vorgeschlagen, ist ein naheliegender und bequemer Ansatz der von manchen Autoren verwendet wurde, beispielsweise von Riehle [180]. Allerdings weisen Schmid [194] und Meroth [155] unter Bezug auf Krattenmacher [115] auf Fehler in diesem Ansatz hin und verwenden aus diesem Grunde die FMD-Methode (field modified diffusion) von Lawless [128]. Hier wird zusätzlich zur Feldaufladung eine konstante Diffusionsaufladung angenommen. In der Literatur sind einige weitere Ansätze zur Modellierung zu finden, die beide Aufladungsvorgänge zu vereinen suchen [160], [138], [179], [126], [232], [145], [31]. Schwierigkeit bei allen Ansätzen bleibt aber, dass sowohl die lokale Feldstärke und die Ionenbeweglichkeit, als auch die Raumladungsdichte nicht genau bekannt sind und für Partikelgrößen zwischen 50 nm und 1 µm über eine Summierung der berechneten Ladungen aus dem Pauthenieransatz und der kinetischen Gastheorie abgeschätzt werden müssen. Solange die Ionendichte die Partikeldichte bei Weitem überwiegt, ist der Schätzungsfehler gering. Rückt die Ionendichte weniger als zwei Größenordnungen in den Bereich der Partikelbeladung wird eine genauere Theorie notwendig. 2.4.3 Experimentelle Ergebnisse aus der Literatur Nicht erst zu Beginn des zwanzigsten Jahrhunderts erfolgte die Messung und Entwicklung theoretischer Zusammenhänge der Partikelladung. Auf einige vorhergehende Arbeiten (beispielsweise von Deutsch [51]) weisen bereits Arendt und Kallmann [11] in ihrem Artikel über die Auflademechanismen hin. Zur Messung bieten sich verschiedene Verfahren an, die sich hauptsächlich in der Handhabung der Partikel unterscheiden und daher meist zu unterschiedlichen Ergebnissen führen. Die einfachste Methode ist hierbei sicherlich, den natürlichen Entladungsvorgang zu nutzen, indem geladene Partikel auf eine metallische Oberfläche aufgebracht und dabei gewogen werden. Die allmählich über die Erdung abfließende Ladung wird mit einem Ampére-Meter registriert. Der Nachteil dieser Technik liegt darin, dass sie nur die Bestimmung des Quotienten aus Masse und Ladung zulässt. Eine mittlere Aufladung in Abhängigkeit von der Partikelgröße lässt sich daraus nur bei monodispersen Partikeln gewinnen. Je breiter die Größenverteilung ist, umso weniger lässt sich aus dem ermittelten Wert eine größenabhängige Ladungsmenge ableiten. Dieser Entladungsvorgang wird auch verwendet, um die elektrischen Eigenschaften eines Materials, wie beispielsweise bei den Messungen zur Oberflächenaufladung mit Korona von Chubb [35], zu bestimmen. Da hier ebene Flächen vermessen wurden, können dieser Arbeit nur Hinweise zur Spannungsabhängigkeit und Materialeigenschaft bei der Aufladung, aber keine direkte Infomation über die Aufladung kleiner Partikel entnommen werden. Messungen in einem Faraday-Käfig, in dem der Induktionsstrom, entstanden durch durchfallende Ladungsträger, gemessen wird, geben ebenfalls keinerlei Abhängigkeit der Ladung vom Partikeldurchmesser wieder. Bei bekanntem Massenstrom oder durch anschließendes Auswiegen kann aber auf den Quotienten (q/d) rückgeschlossen werden, wie 1 Der Korrekturfaktor“ geht auf die Kritik von Liu [139] zurück. Cochet geht in seinem Ansatz davon ” aus, dass die Diffusionsaufladung im Prinzip einer Feldaufladung entspricht, bei der die freie Weglänge der Ionen aufgrund der geringen Größe der Partikel berücksichtigt werden muss. Die von ihm bestimmte freie Weglänge ist allerdings um eine Größenordung zu groß angesetzt, da sie so zu einer guten Übereinstimmung mit den experimentellen Daten führte. Liu schlug vor, diese freie Weglänge als Korrekturfaktor zu bezeichnen. 22 2 GRUNDLAGEN die Arbeit zur tribologischen Aufladung zwischen Kunststoffen von Higashiyama et al. [81] zeigt. Dabei wurden allerdings Partikel mit einem Durchmesser von 400 µm vermessen, die damit deutlich außerhalb des für diese Arbeit interessanten Größenbereichs liegen. Dieselbe Technik verwendeten auch Masuda et al. [145] bei ihren experimentellen Arbeiten zur tribologischen Aufladung feiner Partikel (Dp50 = 3,4 und 12 µm) und grober Sandpartikel (Dp50 = 320 µm), wobei jedoch das Ziel in der Bestimmung des Einflusses des Massenflusses auf die Aufladungseffektivität lag und sie eine Abhängigkeit von der Partikelanzahl nachweisen konnten. Noch weiter entfernt sind die Experimente von Greason [74], der wohl Kugeln aus isolierendem Material und deren tribologische Aufladung untersucht, dabei aber Durchmesser von 1,27 cm verwendet. Eine weitere Möglichkeit ist die Messung der Adhäsionskraft in einer Pulverschicht [41] [19] [209], die auch von der Ladung abhängig ist. Eine direkte Auswertung solcher Messungen ist aber aus verschiedenen Gründen nicht sinnvoll möglich [16]. Bleiben zur Vermessung noch die Bestimmung der Veränderung der Partikelbahn durch ein äußeres elektrisches Feld ähnlich dem historischen Millikan-Versuch, der zur Entdeckung der Elementarladung führte. Dies kann zum einen, wie von Tang et al. [211] vorgeschlagen, durch Bestimmung der Ausbreitung der Partikelwolke in einem Laserlichtschnitt erfolgen. Hierbei dürfte allerdings die Kalibrierung erhebliche Schwierigkeiten bereiten. Zum anderen kann die ablenkende Kraft über die Abweichung der Partikelgeschwindigkeit bestimmt werden. Solche Messungen stellten Mazumder et al. [148] für tribologisch aufgeladene feine Pulverlackpartikel vor. Die Messungen erfolgten dabei mit dem E-SPART analyzer“ [150], der auf dem gekoppelten Ein” satz einer differentiellen LDA und einem Mikrophon beruht. Die Partikel werden durch ein akustisches Signal in Schwingung versetzt. Die Partikelrelaxationszeit τp , bestimmt über die Schwankungsgeschwindigkeitsmessung mit dem LDA, dient dann als Größenindikator. Ein zusätzlich überlagertes, elektrostatisches Feld führt zu einer Wanderungsgeschwindigkeit, die ebenfalls mit dem LDA erfasst wird und so die Bestimmung der Partikelladung ermöglicht. Die Kraft auf das Partikel lässt sich auch aus der Flugbahn errechnen. Diese Methode wurde von Küttner et al. [121] verwendet, wofür ein Testgerät für die Tonertechnik in geeigneter Weise umgebaut wurde, um die Messung geladener Partikel mit einer zehnmal breiteren Größenverteilung zu ermöglichen. Das Gerät saugt die Partikel isokinetisch an. Über den Depositionsort wird die Flugbahn in dem inhomogenen elektrischen Feld und daraus die Partikelladung zurückgerechnet. Die Auswertung erfolgt über eine Videokamera und ein Mikroskopobjektiv offline. Aus der Schattenfläche wird dabei ein flächenäquivalenter Durchmesser bestimmt, der dann die Partikelgröße darstellt. Eine vollständige Messreihe unter Variation der Sprühorgane, des verwendeten Pulvers und der Messorte ist in der Diplomarbeit von Lenz [131] dokumentiert. Die so erhaltenen Ladungswerte dienen in dieser Arbeit als Randbedingungen bei den Berechnungen zur Pulverlackierung. Ein Vergleich mit anderen Werten aus der Literatur ist bedauerlicherweise schwer möglich. Die Messungen von Mazumder et al. [148] bieten sich zwar an, aber die untersuchte Partikelgröße blieb auf 18 µm beschränkt. Die angegebenen Werte für q/m liegen dabei allerdings ab 14 µm um Null. Ein Vergleich mit den Messungen von Küttner et al. [120] sowie Lenz [131] kann nur qualitativ erfolgen, da hier die Messungen bei Partikeln der Größenklasse um 10 µm beginnen und damit nur in einigen Fällen lediglich ein Wert für einen Vergleich zur Verfügung steht. Der Anschluss der Kurven lässt aber zumindest darauf schließen, dass die Messungen sich nicht widersprechen. In der Abbildung 2.4 sind 2.4 Die Partikelladung und die Dynamik des Aufladevorgangs 23 die Ergebnisse der Arbeit von Lenz zusammengefasst. Zum einen ergaben die Messungen, dass die Aufladung mit Tribo nicht zu einem höheren Ladungswert führen als mit Korona, zum anderen konnte eine annähernde Oberflächenabhängigkeit gezeigt werden. Die Messungen erfolgten während der Pulverbeschichtung mit einer Lackierpistole durch ein Loch in einer ebenen Platte. 120 Wörwag, Corona Akzo, Corona Wörwag, Tribo Akzo, Tribo q/d [fC/10µm] 100 80 60 40 20 0 20 40 60 80 100 120 Partikeldurchmesser [µm] Abbildung 2.4: Messungen der größenabhängigen Ladungsmenge q/d bei der Pulverlackierung [131]. Verglichen werden Standardpulver von den Herstellern Akzo (Reinweiß) und Wörwag (weiß) bei zwei Auflademechanismen. Hier nicht gezeigt sind die Balken der Mess fehler“, die in diesem Zusammenhang eher ” als Streuungen bezeichnet werden müssen. Diese Abweichungen vom mittleren angegebenen Wert sind erheblich und können bei der Triboladung den absoluten Wert deutlich übersteigen, da hier natürlicherweise geladene Partikel beider Polaritäten vorkommen. Die Reproduzierbarkeit hingegen erweist sich als sehr gut, so dass diesen Mittelwerten zumindest für Stichproben signifikanter Größe getraut werden kann. Nicht auszuschließen sind natürlich systematische Fehler. Ebenfalls nicht gezeigt sind die Messungen an verschiedenen Orten außerhalb des Düsenmittelpunkts auf dem Objekt. Dies wurde durch Verschiebung der Platte und damit der Öffnung für die isokinetische Absaugung ermöglicht. Die gemessenen Ladungsmengen stimmen dabei sehr gut überein und lassen den Schluss zu, dass keine Partikelseparierung über die Ladungsmenge in der Pulverwolke erfolgt. Die dargestellten Werte in 2.6 zeigen, dass die erzielte Aufladung deutlich unterhalb 10 % der Grenz- oder Sättigungsladung nach Pauthenier bleibt. Dies ist vor allem insofern interessant, als in der Literatur meist von ca. 50% des Grenzwertes ausgegangen wird, für die Triboladung mehr (da hier der Zeitfaktor keine begrenzende Rolle spielt). Die hier vorgestellten Messungen widersprechen dieser Annahme deutlich. Wie ein Vergleich der erzielten Ladungsmengen zeigt, liegen die Werte in derselben Größenordnung (2-5% von qs ) und sind bei der Triboladung meist etwas geringer. Bestätigt wird dies durch 2 GRUNDLAGEN q [fC] 24 1,4x10 5 1,2x10 5 1,0x10 5 8,0x10 4 6,0x10 4 4,0x10 4 2,0x10 4 Ladung auf Partikel, Tribo Ladung auf Partikel, Korona Daten aus Lenz [131] 0,0 20 40 60 80 100 120 Partikeldurchmesser [µm] Abbildung 2.5: Die größenabhängige Ladungsmenge im Verhältnis zum Partikeldurchmesser bei der Pulverlackierung, direkter Vergleich der Aufladecharakteristik bei Tribo- und Koronaaufladung. 0,014 Daten aus Lenz [131] 0,012 2 q / A [ µC/cm ] 0,010 0,008 0,006 0,004 Ladung auf Partikel, Tribo Ladung auf Partikel, Korona lin. Verh. Ladung zu Fläche 0,002 0,000 20 40 60 80 100 120 Partikeldurchmesser [µm] Abbildung 2.6: Die größenabhängige Ladungsmenge im Verhältnis zur Oberfläche q/d2 bei der Pulverlackierung. Messungen von Moyle und Hughes [159]. Sie fanden bei Ihren Ladungsmessungen ebenfalls eine sogar noch deutlich geringere Aufladung mit Tribo als mit Korona. Aus den Abbildungen 2.5 und 2.4 lässt sich eine näherungsweise Abhängigkeit der Ladungsmenge von der Oberfläche für den Partikelgrößenbereich zwischen 30 und 80 µm erkennen. Für größere Partikel ist die Abhängigkeit eher linear mit dem Radius und für kleinere Partikel scheint eine Abhängigkeit mit dem Partikelvolumen zu existieren. Theoretisch ist, wie in 2.5 Elektrische Felder, der statische Zustand 25 den vorangegangenen Kapiteln dargestellt, eine Proportionalität zur Partikeloberfläche zu erwarten. Durch die Überlagerung verschiedener Effekte und fortwährende Be- und Entladung ist eine größenabhängigen Ladungsmenge proportional zu da , 1 < a(d) < 2 zu erwarten. Der Abbildung 2.6 kann entnommen werden, dass die erreichte Aufladung deutlich - zehn- bis hundertfach - über der notwendigen Minimalladung für ausreichende Haftkraft (experimentell zwischen 0,2-0,5 µC/g bestimmt, Sampuran-Singh et al. (1978) [191]) liegen. Die Grenze für Haftung stellt dabei der kleinere Wert (0,2 µC/g) dar. Die Autoren empfehlen ein Vielfaches des oberen Werts (0,5 µC/g) für einen Beschichtungsvorgang. 2.5 Elektrische Felder, der statische Zustand Zur Berechnung elektrischer und magnetischer Felder sind die vier Maxwell-Gleichungen und die Erhaltungsgleichung der Ladung (Kontinuitätsgleichung) bekannt: ~ ~ = ρi , ∇ × E ~ = − 1 DB ∇·D c Dt ~ ~ =0 , ∇ × H ~ = 1 J~ + 1 DD ∇·B c c Dt (2.28) (2.29) Dρi + ∇ · J~ = 0 (2.30) Dt Wenn alle in den Maxwell-Gleichungen auftretenden Größen zeitunabhängig sind, spricht man allgemein vom statischen Fall. Die Maxwell-Gleichungen werden um die Zeitableitungen verkürzt zu: ~ = ~0 ~ = ρi , ∇ × E ∇·E ²0 ~ = ~0 , ∇ × B ~ = µ0 J~ ∇·B (2.31) (2.32) ~ und B ~ für das elektrische und magnetische Feld, ρi ist die RaumlaHierbei stehen E dungsdichte, ²0 ist die Dielektrizitätskonstante im Vakuum, bei den magnetischen Größen ist µ0 die magnetische Feldkonstante und J~ die Stromdichte. Das Gleichungspaar 2.31 enthält die Grundgleichungen der Elektrostatik, während das andere Paar (2.32) diejenigen für die Magnetostatik darstellt. Offensichtlich besteht im statischen Fall kein Zusammenhang mehr zwischen dem elektrischen und dem magnetischen Feld und beide können unabhängig voneinander berechnet werden. Weiter folgt aus der Tatsache, dass die Stromdichte J~ im statischen Fall ausschließlich von elektrischen Feldgrößen bestimmt wird, dass mit einer Lösung der elektrostatischen Feldgrößen das induzierte magnetische Feld bestimmt ist. Allerdings ist die magnetische Feldstärke in diesen Fällen meist vernachlässigbar gering. Zur Berechnung der elektrostatischen Feldkräfte wird häufig das elektrostatische Potential eingeführt. Hierbei nutzt man bekannte Sätze der Vektoralgebra aus, im vorliegenden Fall den Satz von der Wirbelfreiheit von Gradientenfeldern, der ~ durch den rechten Teil in Gleichung 2.31 erfüllt wird. Es existiert also zu jedem Feld E aus den Gleichungen 2.31 ein skalares Potential Φ, so dass gilt: ~ = −∇Φ E (2.33) 26 2 GRUNDLAGEN Für eine bekannte Raumladungsdichte lässt sich das elektrostatische Potential Φ dann über die Poissongleichung bestimmen: ∇2 Φ = ρi ²0 (2.34) Die Raumladungsdichte ist im allgemeinen Fall als Quelle des elektrischen Feldes definiert. Genauer gesagt wird mit ihr die Verteilung der Ladung im Raum sowie in oder auf Oberflächen beschrieben. Dabei wird angenommen, die elektrische Ladung sei beliebig fein unterteilbar. Das ist solange zulässig, wie aus makroskopischer Sicht nur die kollektive Wirkung sehr vieler atomarer Ladungsträger interessant ist. Daraus erhält man leicht die Raumladunsgdichte ρi und die Flächenladungsdichte σ: ZZZ ∆Q ∆V →0 ∆ V ∆Q σ(~r) = lim ∆A→0 ∆ A ρi (~r) = lim oder: d Q = ρi d V → ρi d V (2.35) (2.36) Für einen beliebigen Raumbereich in einem elektrischen Feld gilt dabei unter Anwendung des Superpositionsprinzips [116]: ZZ S ZZ Z ~ · d~a = 1 E ρi d V ²0 (2.37) G Mit Hilfe des Satzes von Gauß erhält man hieraus wieder die Gleichung links in 2.31. Die Berechnung im konkreten Fall erfolgt daher meist, indem zunächst das raumladungsfreie Feld (Laplace-Gleichung) bestimmt und dann eine Abschätzung der darin befindlichen Raumladungsdichte in Anlehnung an Gleichung 2.37 vorgenommen wird. Eine genauere Diskussion zum konkreten Vorgehen wird in Kapitel 3.4 gegeben. Eine detaillierte Darstellung der Grundgleichungen und ihrer Herleitung findet man bei [116], die vollständige physikalische Diskussion in [88]. Generell bleibt die Bestimmung der Raumladungsdichte eine der noch nicht vollständig beantworteten Fragen in der Literatur. Die Schwierigkeiten hierfür liegen in der Erzeugung der Quellen durch Ionisationseffekte, die eine Abschätzung unter angemessenen Annahmen unumgänglich machen. Zu lösen bleibt dann ein Randwertproblem für die Raumladungsdichte und das elektrostatische Feld. Eine knappe, aber vollständige Darstellung hierzu wird beispielsweise von Römer [187, Kapitel 4.2] gegeben. 2.6 Elektrohydrodynamik Die elektrischen Feldkräfte wirken nicht nur auf die geladene disperse Phase sondern auch über die Ionenbewegung auf die kontinuierliche Phase. In diesem Fall spricht man von dem Ionenwind (ionic wind) und versteht darunter die Bewegung der Ionen im elektrischen Feld und die Veränderung der Fluidströmung durch diese Driftbewegung. Die Kraftübertragung erfolgt durch Stöße der Ionen untereinander und durch die Kraftwirkung auf ionisierte Moleküle selbst. Wirksam ist hier die sogenannte Lorentzkraft: ~ + ~u × B) ~ F~L = q (E für ein einzelnes geladenes Teilchen c ~ ~ + J~ × B ~ ∼ entsprechend für ein Kontinuum F~L = ρi E = ρi E (2.38) (2.39) 2.6 Elektrohydrodynamik 27 Die Näherung ergibt sich aus der Tatsache, dass der Term aus Stromdichte und Magnetfeld in den meisten Fällen weniger als ein Prozent an der gesamten Lorentzkraft auf ein Kontinuum ausmacht. Für inkompressible Fluide und einwirkende elektrostatische Felder gilt die Cauchy-Gleichung. Unter der Annahme keiner weiteren äußeren Kräfte oder nur solcher, die sich aus einem Potential berechnen lassen, reduziert sich die Cauchy-Gleichung zu [58]: " # 2 ~ − E ∇² + ∇ ρf E 2 ( D² ) = ∇p ρi · E 2 2 Dρf (2.40) Eine Lösung existiert hierfür nur, wenn die Korteweg-Helmholtz-Kraft: 2 ~ − E ∇² F~KH = ρi · E 2 (2.41) ein echter Gradient ist (lineare Differentialform erster Ordnung). Führt man den Wirbelstärkevektor w ~ und die kinematische Viskosität ν ein, so lässt sich die Cauchy-Gleichung mit der Gravitationskraft, die dann als Gradient eines Potentiales (F~g = ∇g) beschreibbar sein muss, als eine äußere Kraft in die folgende Form bringen: D~v + 2w ~ × ~v = − ∇ Dt à p v2 +g+ ρf 2 ! 2 2 ~ + ρ−1 f FKH + ν ∇ v (2.42) Mit elementarer Umformung erhält man für die Wirbelstärke: w ~ =∇ × ( ~ FKH ) + ν ∇2 v 2 2ρf (2.43) Der erste Teil auf der rechten Seite beschreibt die Wirbelerzeugung durch elektrostatische Kräfte. Verschwindet dieser Term, so reduziert sich obige Gleichung zur klassischen Wir~ belerhaltung. Der temperaturabhängige Teil von ( F2ρKH ) ist der mit der Abhängigkeit von f Anisotropien der Dielektrizitätskonstanten im Fluid: E2 1 −( )∇( ) × ∇² 2ρf 2 (2.44) Er ist unter üblichen Bedingungen sehr klein verglichen mit: ( 1 ~ ) (∇ ρi ) × E 2ρf (2.45) und kann daher in der folgenden Diskussion übergangen werden. In Strömungen wird die Wirbelstärke durch Reibung ständig reduziert (ν ∇2 v 2 - Term in Cauchy-Gleichung, außer an festen Wänden, da hier die Haftbedingung gilt. Im Falle eines leitenden Fluides verändern sich die Umstände, da nun eine konstante Wirbelerzeugung im gesamten Fluid hinzutritt (Gl. 2.45), die zu starken turbulenten Bewegungen führt, sobald hohe Feldstärken und starke Gradienten der Raumladungsdichte auftreten. Dabei ist allerdings ~ der Wirbelstärke selbst wiederum zu beachten, dass der Produktionsterm (∇ ρ) × ∇ E von dieser abhängig ist und es daher zu einer Kopplung kommt. Je nach vorliegenden 28 2 GRUNDLAGEN Bedingungen zu einer gegenseitigen Verstärkung, durch die ohne den Dissipationsterm die Wirbelstärke den Wert Unendlich erreichte und die daher Grundlage der sogenannten elektrohydrodynamischen Instabilität ist, oder zu einer Dämpfung bis zur vollständigen Unterdrückung der elektrohydrodynamischen Wirbelerzeugung. In vielen Fällen ist jedoch die Raumladungsdichte annähernd konstant im Raum und der Gradient geht gegen Null, oder das Feld und der Gradient der Raumladungsdichte stehen parallel zueinander. In beiden Fällen reduziert sich der elektrohydrodynamische Einfluss auf die Lorentzkraft. Eine Betrachtung der Einheiten des verbleibenden Terms ~ gibt Hinweise auf den Charakter der Wirkungsweise: ρ·E " # ~ := A · s · kg · m ρi · E m3 A · s3 " # · ¸ kg Pa = = m2 · s2 m (2.46) (2.47) Die Einheit ist Pascal pro Meter, entsprechend der Kraft durch einen Druckgradienten in Gleichung (2.14). Ein analoger Einfluss auf die Strömung wird bei ausreichend geringen Strömungsgeschwindigkeiten beobachtet und als elektrischer Wind“ bezeichnet. ” Typische Werte bei der Partikelabscheidung in Elektrofiltern sind beispielsweise für ρ: 25 µC/m3 und 3 kV / cm für die Feldstärke. Daraus ergibt sich: ~ = 25 µC · 300 kV = 7, 5 Pa = 0, 075 mbar ρi · E m3 m m m ein äquivalentes Druckgefälle von etwa 0,1 mbar pro Meter. (2.48)