Ubungsblatt 3 - Daniel Roggenkamp
Werbung

Universität Mannheim
Prof. Dr. Daniel Roggenkamp
Lineare Algebra IIb
05.05.2017
Übungsblatt 3
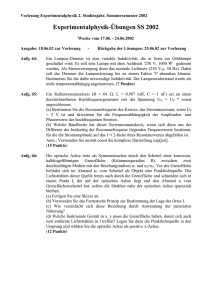
Aufgabe 1 (10 Punkte) Betrachten Sie ein Dreieck
in der Euklidischen Ebene wie in der Abbildung und
beweisen sie den Kosinussatz:
cos(α) =
b 2 + c 2 − a2
2bc
und den Sinussatz:
sin(α)
sin(β)
sin(γ)
=
=
.
a
b
c
Aufgabe 2 (10 Punkte) Geben Sie die Matrixdarstellung A ∈ SO3 (R) der Drehung um
den Winkel ϕ um die Achse R(1 1 1)t an. (Mit Begründung!)
Aufgabe 3 (80 Punkte) Sei G ⊂ SO3 (R) eine endliche Untergruppe.
(a) Zeigen Sie, dass die Matrixmultiplikation mit A ∈ SO3 (R) die Einheitssphäre
S2 = {(x1 x2 x3 )t ∈ Mat(3, 1; R) | x21 + x22 + x23 = 1} ⊂ Mat(3, 1; R)
invariant läßt, d.h. dass für alle x ∈ S2 auch gilt A · x ∈ S2 .
(b) Als Pol von I3 6= A ∈ G bezeichnet man solche x ∈ S2 , für die gilt A · x = x.
Argumentieren Sie, dass jedes A ∈ G \ {I3 } genau zwei Pole besitzt.
(c) Wir nennen
M := {x ∈ S2 | es gibt ein I3 6= A ∈ G mit A · x = x}
die Menge der Pole von G. Begründen Sie, dass M endlich ist.
(d) Zeigen Sie, dass die Matrixmultiplikation mit A ∈ G die Menge M invariant läßt,
d.h. A · m ∈ M für alle m ∈ M . Die endliche Gruppe G operiert also auf der
endlichen Menge M .
(e) Bezeichne mit
orbG (m) := {A · m | A ∈ G} ⊆ M und Stabm (G) := {A ∈ G | A · m = m} ⊆ G
den Orbit, bzw. den Stabilisator von m unter der G-Wirkung. In der Vorlesung
hatten wir die allgemeinen Formeln
X
X
|G| = |orbG (m)| |Stabm (G)| und
|Stabm (G)| =
|M g |
m∈M
g∈G
Universität Mannheim
Prof. Dr. Daniel Roggenkamp
Lineare Algebra IIb
05.05.2017
bewiesen, wobei M g = {m ∈ M | g(m) = m} die Menge der Fixpunkte unter der
g-Wirkung ist. Verwenden Sie den Umstand, dass jedes I3 6= A ∈ G genau zwei
Fixpunte in M besitzt, um zu zeigen
X
(|Stabm (G)| − 1) = 2(|G| − 1) .
(1)
m∈M
(f) Seien Oi = orbG (mi ) für i = 1, . . . , r die verschiedenen G-Orbiten in M , und
ni := |Oi |, si := |Stabmi (G)|. Folgern Sie aus Gleichung (1) und dem Umstand,
dass die Stabilisatoren aller Elemente eines Orbits isomorph sind die Formel
r X
1
2
=
1−
.
2−
|G|
s
i
i=1
(2)
(g) Schließen Sie aus Gleichung (1), dass es nur zwei oder drei Orbiten geben kann,
d.h. dass nur r = 2 und r = 3 möglich sind.
(h) Zeigen Sie, dass im Falle r = 2 gilt s1 = s2 = N = |G| und n1 = n2 = 1. Schließen
Sie, dass alle A ∈ G Drehungen um die Achse durch m1 und m2 sind. Folglich
ist G ∼
um diese
= ZN die Gruppe der Drehungen um Vielfache des Winkels 2π
N
Achse.
(i) Betrachten Sie nun den Fall r = 3, und nehmen Sie an, dass s1 ≤ s2 ≤ s3 . Zeigen
Sie, dass nur die folgenden Fälle möglich sind
(s1 , s2 , s3 ) (n1 , n2 , n3 ) |G|
(2, 2, s3 )
(s3 , s3 , 2) 2s3
(2, 3, 3)
(6, 4, 4)
12
(2, 3, 4)
(12, 8, 6)
24
(2, 3, 5) (30, 20, 12) 60
(j) Betrachten Sie den ersten Fall (s1 , s2 , s3 ) = (2, 2, s3 ). Argumentieren Sie, dass
der Stabilisator Stabm3 (G) ∼
= Zs3 aus Drehungen um die Achse durch die beiden
Punkte in O3 bestehen muss. Die restlichen s3 Elemente in G vertauschen diese
beiden Punkte, sind also Drehungen um den Winkel π um Achsen, senkrecht zur
Achse durch die Punkte in O3 . Es folgt, dass G die Symmetriegruppe eines regelmäßigen s3 -Ecks in einer Ebene des Mat(3, 1; R) ist, wobei die Ecken, bzw. die
Seitenmittelpunkte gerade den Elementen der Orbiten O1 und O2 entsprechen.
(In den anderen drei Fällen ist G gerade die Symmetriegruppe eines Tetraeders,
Würfels, bzw. Dodekaeders. n1 ist jeweils die Anzahl der Kanten, n2 die Anzahl
der Ecken, und n3 die Anzahl der Seitenflächen.)
Abgabe 12.05.2017*
*
Lösungen bitte bis 12:00 Uhr in entspr. Kasten im Eingangsbereich des C-Teils von A5 einwerfen.