Document
Werbung

8.
Die Mechanik von deformierbaren festen Körpern
Feste Körper können unter dem Einfluß von Kräften ihre Form ändern. Es gibt
Deformationen, die nur die Form aber nicht das Volumen ändern (Scherungen, Biegungen,
Drillungen) und solche, die auch das Volumen ändern (Kompressionen, Dilatationen).
Innerhalb gewisser Grenzen sind feste Körper form- und volumenelastisch, darüber hinaus ist
er plastisch (plastisches Fließen).
Ein Körper heißt homogen, wenn die physikalischen Eigenschaften überall im Innern gleich
sind. Sind sie auch von der Richtung unabhängig, so heißt der Körper isotrop.
8.1.
Hookesches Gesetz. Dehnung. Längenänderung in einer Richtung.
Ein elastischer Körper mit der Länge l, dem Querschnitt A, wird bei x = 0 festgehalten. Eine
r
Zugkraft F wirkt in x-Richtung. Wir untersuchen die Längenveränderung ∆l .
Die Erfahrung zeigt: ∆l ∝ F (Hooke)
Relative Änderung: ε =
∆l
l
{
Def
F ↓
∝
= σ
{
A Spannung
→
F = E ⋅ A⋅
∆l
l
relative
Dehnung ε
Def. von E: Proportionalitätskonstante, Elastizitätsmodul; [E]=
ε=
1
⋅σ
E
N
m2
Hookesches Gesetz
8.2.
Querkontraktion bei Längenänderung in einer Richtung und bei allseitigem
Druck [b)]
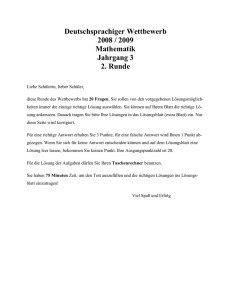
a) Der Körper (Stab) wird unter dem Einfluss einer Zugspannung σ gleichzeitig um - ∆d
dünner (Querkontraktion).
Def .
∆d ∆l ↓
Das Verhältnis
:
= µ
d
l
heißt Poissonzahl oder Querkontraktionszahl.
Versuch: Zeige: Verlängerung einer Gummischnur führt zur Verringerung von d.
Versuch zur Messung von E
∆l = ∆ν ⋅ R
=
∆x
⋅R
2⋅ L
R = 700 m
l
=2m
L = 6,40 m
∆x = 0,11 m
A =
= 2 ⋅ ∆ν ⋅ L
1
⋅π ⋅ d 2
4
F = Fz = ∆m ⋅ g
E=
E =
F l
4 ⋅ ∆m ⋅ g l ⋅ 2 ⋅ L
⋅
=
⋅
A ∆l
∆x ⋅ R
π ⋅d2
∆m ⋅ g ⋅ 8 ⋅ l ⋅ L
π ⋅ d 2 ⋅ R ⋅ ∆x
Merke: Die Ablenkung des LASERSTRAHLs dient nur zur Messung von ∆ν.
Versuch: Zeige Querkontraktion durch Verzerrung von Kreis zu Ellipse.
Volumenänderung ∆V :
∆V = (d − ∆d ) ⋅ (l + ∆l ) − d 2 ⋅ l
2
sei ∆l << l , ∆d << d
∆V = d 2 ⋅ ∆l − 2 ⋅ l ⋅ d ⋅ ∆d
Einsetzen ergibt:
∆V
σ
= ε ⋅ (1 − 2 ⋅ µ ) =
⋅ (1 − 2 ⋅ µ )
↑
V
E
Hookesches
Gesetz:
1
ε = ⋅⋅σ
E
Bisher: Zug bzw. Spannung in einer Richtung.
Jetzt:
∆V bei allseitigem Druck: ∆p = −σ
∆V
− ∆p
= 3⋅
⋅ (1 − 2 ⋅ µ )
V
E
Der Faktor 3 erklärt sich aus der Allseitigkeit.
Def. der Kompressibilität κ (Kappa)
κ =−
K=
1 ∆V 3
⋅
= ⋅ (1 − 2 ⋅ µ )
V ∆p E
1
K= Kompressionsmodul.
κ
Abb. 6.10. Querkontraktion beim Wirken
einer Zugspannung Φ
Messung von k mit Drehpendel (s. o.):
TSchw. = 2 ⋅ π ⋅
I
k
8.3.
Scherung, Drillung
r
Entsteht durch eine tangential zu einer Fläche angreifenden Kraft F
r
F
r
F
τ =
A
τ = G ⋅α
G = Torsions − ( Scher −) Modul.
r
Versuch: Verdrillung eines Zylinders, z. B. Drillung (Torsion) eines Drahtes:
Zylinder:
Länge l, Radius R
r
Kraft F greift am oberen Ende tangential an.
Wir denken uns den Zylinder in viele Hohlzylinder
r⋅ϕ
zerlegt. Der Hohlzylinder in der Abbildung ist ringsum um den Winkel α = l verschert.
r ⋅ϕ
Damit ergibt sich aus τ = G ⋅
, und: dF = τ ⋅ 2 ⋅ π ⋅ r ⋅ dr das Drehmoment dT = dF ⋅ r :
l
dT = τ ⋅ 2 ⋅ π ⋅ r 2 ⋅ dr = G ⋅
2 ⋅ π ⋅ r 3 ⋅ dr ⋅ ϕ
l
Für das Drehmoment des gesamten Zylinders wird über den Radius integriert:
2 ⋅π ⋅ G ⋅ϕ
π
R4
⋅ ∫ r 3 ⋅ dr = ⋅ G ⋅
⋅ϕ
l
2
l
0
R
T=
Im Gleichgewicht muß dies dem rücktreibenden Moment gleich sein:
TRück
π
R4
= −k ⋅ ϕ , k = ⋅ G ⋅
2
l
Richtmoment
Dr = Richtmoment
TRück = − Dr ⋅ ϕ
Dr ∝ R 4
R = Radius des Drahtes
8.4.
Verbiegung eines Balkens
Versuch: Die neutrale Faser in der Mittelebene bleibt unverändert, unten: Verkürzung, oben:
Verlängerung.
Versuch: Die Biegung eines Balkens, s = Biegepfeil, hängt ab vom Biegemoment B
(Flächenträgheitsmoment).
Ergänzung: Def. von B
B := ∫ z 2 ⋅ dy ⋅ dz
b) zentrale Faser bei z = 0 (Mitte des Balkens)
a) Querschnitt
B=
d 3b
12
für Balken, d. h. um so größer, je schmaler der Balken bzgl. der Richtung y ist. Bsp. : Balken
werden nur hochkantig verwendet!
Zur Biegung eines Balkens
1. Balken mit rechteckigem Querschnitt A = a ⋅ b , der an einem Ende fest eingespannt und am
anderen Ende (Entfernung x = L) mit Kraft F0 belastet werde. Untersuchung der
Durchbiegung s des Balkenendes (Biegungspfeil).
Dazu: Definition der neutralen Faser (bleibt unverändert bei Verbiegung)
Fasern oberhalb werden elastisch verlängert, unterhalb elastisch komprimiert
2. Die Durchbiegung (Biegungspfeil) wird bestimmt durch:
das Flächenträgheitsmoment oder Biegemoment B := ∫ ∫ z 2 ⋅ dy ⋅ dz
den Elastizitätsmodul E
die Länge L
die Kraft F
und ist unabhängig von der Form des Querschnittes gegeben durch
s = L3 ⋅ F (3 ⋅ E ⋅ B )
3. Werte für Biegemoment B
9.
Flüssigkeiten
Eine spezielle Gruppe dormierbarer Körper bilden die Flüssigkeiten. Während man bei
Festkörpern aus Kapitel 8 für kleine Kräfte elastische Verformungen in Form und Volumina
feststellen konnte haben Flüssigkeiten ein nahezu konstantes Volumen. Die hierfür
entscheidende Größe Kompressibilität wird in diesem Kapitel eingeführt.
9.1.
Freie Verschiebbarkeit von idealen Flüssigkeiten
ideal:
Reibungskräfte vernachlässigbar. Schubmodul G = 0.
Folge: An Oberfläche können keine Tangentialkräfte auftreten.
Versuche:
1.) Oberfläche einer Flüssigkeit, auf die nur Schwerkraft wirkt, ist horizontale Ebene.
2.) Oberfläche einer rotierenden Flüssigkeit besitzt Parabelform.
Die resultierende Kraft ist stets ⊥ zur Oberfläche!
Aus r = x, tan α = z ' =
dz ω 2 ⋅ x
=
fo lg t
dx
g
z (x ) = ∫
ω2 ⋅x
ω 2 ⋅ x2
⋅ dx + z (0 ) =
+ z (0 )
g
2⋅ g
9.2.
Statischer Druck
9.2.1.
Definition, Druckausbreitung
Def.:
p =:
Kraft
F
=
Fläche A
(Parabel)
[ p] = N ⋅ m −2 = Pa = 10 −5 bar ,
Pa = Pascal
Merke :
1 atm = 1013 mbar = 1,013 ⋅ 10 5 Pa
1 at = 1 kp ⋅ cm − 2 = 9,81 ⋅ 10 4 Pa
Versuch: Allseitige Druckausbreitung
Wegen freier Beweglichkeit der Flüssigkeitsmoleküle ist
r
F = 0 ⇒ p = const.
Versuch: Hydraulische Presse
p = const. ⇒ 2 Stempel mit A1 , A2 , A2 >> A1 . F1 = p ⋅ A1 ; F2 = p ⋅ A2
F2 = F1 ⋅
A2
>> F1
A1
(Schweredruck wird vernachlässigt)
Analogie zum Hebelgesetz.
Druckarbeit
∆W = F ⋅ ∆x = p ⋅ A ⋅ ∆x = p ⋅ ∆V
Kompressibilität: Drucksteigerung ⇒ Volumenabnahme
Wird der Druck auf ein Volumen V, wird um einen kleinen Betrag ∆p erhöht, kann man
experimentell die Beziehung finden: ∆V]-V∆p
Der Proportionalitätsfaktor hierfür ist:
κ =−
H2O:
1 dV
⋅
V dp
κ = 5 ⋅ 10 −10 ⋅
ist i. allg. sehr klein bei Fl. ,temperaturabhängig
m2
,
N
das ist wichtig für hydrostatischen Druck
(Schweredruck)
9.2.2.
Schweredruck
Flüssigkeitssäule: Höhe (h ) , Fläche ( A) , besitzt Gewicht F = {
ρ ⋅ g ⋅ h ⋅ A ⇒ Druck
Dichte
p=
F
= ρ ⋅ g ⋅h
A
Druck auf die Grundfläche in Höhe h = 0, wegen freier Verschiebbarkeit kann sich Druck
in alle Richtungen gleich ausbreiten (auf Seiten, nach oben)
Bsp.: Im Wasser erhöht sich der Druck alle 10 m um 9,81*104 , das heißt auf tauchenden
Körper um 1kg pro cm3.
Bsp.: Staudamm, Kraft auf Staumauer in Höhe z, L Länge der Staumauer,
∆F = p(z)Ldz
F=0.5ρgLH2, das erklärt die Form der Staudämme
unabhängig von Form des Gefäßes (hydrostatisches Paradoxon).
Versuche:
1) Kommunizierende Röhren: wenn ρ = const. ⇒ gleiche Höhen, sonst
h1 ρ 2
=
,
h2 ρ 1
z. B. Schichtung von H2O(1) mit Hg(2)., Schlauchwaage zur Bestimmung ob räumlich
getrennte Punkte in gleicher Höhe sind
2) Auftrieb
Ein Körper mit der Form eines Prismas, wird in Wasser getaucht. Er erfährt eine Kraft die der
Schwerkraft entgegenwirkt.
FA (Auftrieb) = Gewicht der verdrängten Flüssigkeitsmenge
FA = F2 − F1
= ρ ⋅ g ⋅ A ⋅ (h2 − h1 ) = ρ ⋅ g ⋅ ∆V
14243
∆V
für beliebig geformte Körper gilt das Archimedische Prinzip:
F = -ρKgVKg + ρFgVFg
(K..Körper, F..Flüssigkeit)
3) Schwimmen, Schweben
FA = FG (Gewicht )
Schweben
FA < FG
Sinken
FA > FG
Steigen
Diskussion der Drehmomente:
Begriffe:
Stabilität: ΣTi=0 (Summe der Drehmoment hebt sich auf)
Schwerpunkt SF der verdrängten Flüssigkeit, S Schwerpunkt des Körpers
Metazentrum ist Schnittpunkt der Mittelebene eines Körpers mit dem
Schwerpunkt des Körpers unter Wasser (siehe Skizze)
Stabil gelagert ist ein Körper immer dann, wenn das Metazentrum oberhalb des
Schwerpunktes des schwimmenden Körpers ist.
9.3.
Flüssigkeitsgrenzen
9.3.1.
Oberflächenspannung
Resultierende Kraft auf Molekül an Oberfläche ist nicht Null (Kräfte: Kohäsion)
Def: σ : ∆W aufwenden, um Molekül aus dem Inneren an Oberfläche zu bringen, damit
A → A+∆A vergrößert werden kann.
σ =:
∆W
∆A
spezifische Oberflächenenergie, [σ ] = J ⋅ m −2
Messg. an Flüssigkeitslamelle
∆A = l ⋅ ∆s ⋅ 2
(zweiseitige Oberfläche d. Lamelle)
∆W = F ⋅ ∆s = σ ⋅ ∆A = σ ⋅ ∆s ⋅ 2 ⋅ l
F
σ =
2⋅l
Dies wird auch Oberflächenspannung genannt.
Kein Unterschied zu oben: [σ ] = N ⋅ m −1 ≡ J ⋅ m −2 .
Versuch:
Demonstration durch Anheben eines Metallringes, der in Flüssigkeit eintaucht; Messung der
Kraft durch Federwaage:
∆W = F ⋅ ∆h = σ ⋅ 2 ⋅ 2 ⋅ π ⋅ r ⋅ ∆h
(Beachte: Lamelle hat zwei Seiten!)
Seifenblase
Energiegewinn durch Verkleinern der Oberfläche (∆A) durch Verkleinern des Radius (∆r )
Arbeitsleistung ∆p ⋅ ∆V gegen Überdruck:
∆V = 4 ⋅ π ⋅ r 2 ⋅ ∆r ,
[
]
∆A = 4 ⋅ π r 2 − (r − ∆r ) ≈ 4 ⋅ π ⋅ 2 ⋅ r ⋅ ∆r ⋅
2
2
↑
wegen Innen − u .
Außenfläche!
Damit: Energiegewinn:
σ ⋅ ∆A = σ ⋅ 4 ⋅ π ⋅ 2 ⋅ r ⋅ ∆r ⋅ 2 = ∆p ⋅ 4 ⋅ π ⋅ r 2 ⋅ ∆r ⇒ ∆p =
4 ⋅σ
∝ 1/r
r
Innendruck der Seifenblase nimmt also mit steigendem Radius ab.
9.3.2.
Kapillarität
Volumen V = π ⋅ r 2 ⋅ h wird um ∆h
gehoben durch Gewinn von Oberflächenenergie σ ⋅ 2 ⋅ π ⋅ r ⋅ ∆h .
Energievergleich:
ρ ⋅ V ⋅ g ⋅ ∆h = ρ ⋅ g ⋅ π ⋅ r 2 ⋅ h ⋅ ∆h = σ ⋅ 2 ⋅ π ⋅ r ⋅ ∆h
{
m
h=
2 ⋅σ
r⋅ρ⋅g
Kapillare Steighöhe
hier: Annahme vollständiger
Benetzung
9.3.3. Grenzfächenspannung, Benetzungswinkel
An Grenzflächen zwischen zwei Stoffen (i, k) wirkt die Adhäsion. Die Oberflächenspannung
ist die Grenzflächenspannung zwischen Medium und dem Vakuum.
Aber: Beachte Grenzwinkel, Randwinkel:
(δ13-δ23)/δ12=cosθ falls δ12≥|δ13-δ23|,
ansonsten ist θ nicht definiert, “vollständige
Benetzung“ (Bsp. Superfluide)
Konkav gekrümmte Oberfläche
θ, Randwinkel, θ <
π
2
cosθ > 0, z. B. H2O
konvex gekrümmte Oberfläche
θ>
π
, cos < 0, z. B. Hg
2
Beispiel: Tropfen auf Wasser
1. Gas (Luft)
2. Wasser
3. Flüssigkeit (z.B. Öl)
δ12 = δ13cosθ1 + δ23cosθ2 (Winkel siehe Skizze)
Daher:
Modifiziere Ausdruck für Steighöhe
h=
2 ⋅ σ ⋅ cosθ
r⋅ρ⋅g
Inhalt:
[Die mit * versehenen Unterabschnitte sind nicht mehr als Kapitel aufgeführt, ihr Inhalt
besteht aber noch.]
10. Gase
10.1 Makroskopische Größen
*10.1.1 Kompressibilität
*10.1.2 Luftdruck - Barometrische Höhenformel
10.2 Statistische Interpretation des Druckes (kinetische Gastheorie)
*10.2.1 Modell des idealen Gases
*10.2.2 Gasdruck
10.3 Geschwindigkeits- und Energieverteilungsfunktion
10.4 Reale Gase
10.
Gase
In diesem Kapitel geht es um die Eigenschaften gasförmiger Materie hinsichtlich der
makroskopischen Größen Druck, Volumen, Dichte und Temperatur, wobei der Schritt zur
Thermodynamik offensichtlich nicht groß ist. Die mikroskopische (atomare) Begründung für
das Verhalten idealer Gase bei Änderung dieser Größen liefert die kinetische Gastheorie.
Definition:
Ein ideales Gas ist frei Verschiebbar und beliebig komprimierbar. Die Atome/Moleküle
werden wie Punktmassen der klass. Mechanik behandelt, welche vollelastische Stöße
ausführen . Unter Normalbedingungen trifft diese Näherung recht gut zu.
10.1. Makroskopische Größen, Kompressibilität, barometrische Höhenformel
Wichtig ist Zusammenhang des Druckes p mit dem Volumen V:
Bei konstanter Temperatur findet man experimentell das Gesetz von Boyle- Mariotte:
p ⋅ V = const. = C
Die Konstante C hängt von Temperatur ab.
Verwendet man p ⋅ V = const. , so ergibt sich für Kompressibilität κ :
κ =−
k=
1 dV
1 d C
1
⋅
= − ⋅ = −
V dp
V dp p
V
1
p
C
1
⋅ − 2 = +
p
p
(Bei konstanter Temperatur)
Ein Gas ist also umso leichter komprimierbar, je kleiner der Druck ist.
Die Dichte ρ einer
Temperatur konstant) ist
ρ=
Gasmenge
(abgeschlossenes
M M⋅p
=
⇒ρ∝p
V
C
Volumen
V,
Masse
M,
.
Bei Temperaturänderung ∆Τ gilt bei Gasen mit dem Druck p und dem Volumen V das
Gesetz von Gay-Lussac :
p = p 0 ⋅ (1 + γ p ⋅ ∆T )
V = V0 = cnst.
V = V0 ⋅ (1 + γ V ⋅ ∆T )
p = p 0 = cnst.
In Verbindung mit Boyle- Mariotte folgt aus
p0 V = p V0 = C
⇒
1+ γ V ∆T = 1+ γ p ∆T
1
V
p
γ
=
γ
=
⇒
273,15 .
Daraus ergibt sich die Festlegung der Kelvin-Skala.
Verallgemeinert: Zustandsgleichung idealer Gase :
p ⋅V
p ⋅V
= 0 0 = const. = n ⋅ R
T
T0
n = Anzahl der Mole (Stoffmenge)
R = universelle Gaskonstante = 8,3144 J ⋅ mol-1 ⋅ K-1
p⋅V = n⋅ R⋅T
p 0 = 1,01325 ⋅ 10 5 Pa (1 atm )
V0 = 22,414 l ⋅ mol −1 ( Molvolumen)
Normalzustand :
T0 = 273,15 K
Die barometrische Höhenformel (I):
Das Gewicht auf die Fläche A nimmt mit zunehmender Höhe ab. Beim Anstieg von h auf
h+dh nimmt die Gewichtskraft um ρgA dz in z-Richtung ab, der Schweredruck wird kleiner:
dp = − ρ gdh
.
(1)
Bei konstanter Temperatur ist
p
ρ
=
p
ρ
0 = const ⇒ ρ = 0 p
p
ρ
0
0
.
(2)
Einsetzen in (1) liefert eine durch Trennung der Variablen zu lösende Differentialgleichung:
dp= − ρ0 pgdh ⇒ p= p0 e
p0
−ρgh
p0
die barometrische Höhenformel im
Schwerefeld der Erde mit g=const. (erdnahes Feld).
r0
p0
ist hierbei temperaturabhängig.
Die Druckveränderung in einer isothermen Atmosphäre ist also nicht linear sondern
exponentiell abnehmend (im Gegensatz zur linearen Abnahme in Flüssigkeiten).
10.2.
Statistische Interpretation, kinetische Theorie der Gase
Modell des idealen Gases:
Gas aus Atomen oder Molekülen, die sich
- mit statistisch verteilten Geschwindigkeiten bewegen,
- wie kleine starre Kugeln mit Radius r0 verhalten,
- völlig elastische Stöße ausführen,
- es gelten Energie- und Impulserhaltung.
- Das Eigenvolumen der Atome oder Moleküle ist vernachlässigbar.
Der Druck eines Gases auf eine Wand wird durch Stöße der Teilchen mit der Wand bewirkt.
Es ist also
d
∂ Impuls
;P =
Druck = Kraft = t
Fläche
Fläche
dt
Impuls
A
.
Treffen pro Sekunde N Teilchen (Masse m) mit der senkrechten Geschw. vs auf, so ist
d Impuls 2 N m v
=
s
dt
⇒
P = 2 N m vs
A
.
Impulsänderung ∆p x beim Stoß eines einzelnen Gasmoleküls auf eine Gefäßwand, z. B. in xRichtung: ∆px=2mvx
Mit Nx =N/V vxAdt= nx vxAdt (Teilchendichte der sich in x-Richtung bewegenden Teilchen
nx = N/V) die auf ein Wandelement A treffen ist der Druck auf die Wand p = 2m nxvx2 (N =
Nx oben einsetzten). Auch ein Teilchen mit der Geschw. v={vx,vy,vz} überträgt nur den
Impuls 2mvx . Aber nicht alle haben die gleiche Geschwindigkeit. Im ruhenden Gas sind alle
Richtungen gleich wahrscheinlich, d.h. dass der mittlere Impulsübertrag in alle Richtungen
gleich ist:
v 2 = v x2 + v y2 + v z2
v x2 = v y2 = v z2
.
Für alle Teilchen (Teilchendichte n) ist der Druck in x-Richtung :
p=
1
1
n2 m vx2 = n m vx2 Þ vx2 = vy2 = vz2 = v2
2
3 ,
damit erhält man für den Druck :
1
2 m
2
m nv2 = n v2 = n Wkin ,
3
3 2
3
Wkin = mittlere kin. Energie
.
p=
Mit n = N/V folgt daraus sofort
p V=
2
2
N Wkin = Nv2
3
3
.
Sei die Stoffmenge 1 Mol : N = N A ( Avogadro)
p ⋅V =
m ⋅ v2 2
2
⋅ NA ⋅
= ⋅ Wkin
3
2
3
(für 1 Mol).
Gleichverteilungssatz der Energie:
Der Vergleich mit der Zustandsgleichung für ideale Gase liefert:
3
⋅ R ⋅ T = Wkin (1 Mol ) = N A ⋅ E kin ( pro Teilchen)
2
Pro Teilchen gilt also mit NA= Avogadro-Zahl, k = Bolzmann-Konstante = R NA-1 :
E kin =
3
⋅ k ⋅T
2
Man definiert die absolute Temperatur T über die kinetische Energie (in Kelvin Schritten).
Man nennt dies auch die Grundgleichung der kinetischen Gastheorie für eine
translatorische Bewegung in drei Freiheitsgraden.
1
⋅ k ⋅T
2
(Gleichverteilungssatz der Energie). Das gilt für Translations- und Rotationsbewegungen
gleichermaßen.
D.h.
pro
Freiheitsgrad
Allgemein :
ist
die
mittlere
Energie
eines
Atoms/Moleküls
1
E = ∫ ⋅ ⋅ k ⋅ T , f = Anzahl der Freiheitsgrade.
2
3⋅ k ⋅T
(f = 3) , die mittlere quadratische Geschw. hängt von der Temperatur
m
T und der Teilchenmasse m ab.
⇒
v2 =
10.3.
Geschwindigkeits- und Energieverteilungsfunktion
In diesem Kapitel wird das Thema nur angedeutet, nicht jedoch in großer Rechnung
ausgeführt. Wichtig ist, dass zwischen der Verteilung der Geschwindigkeitskomponenten in x,
y und z (hier nicht aufgeführt) und der Maxwell-Bolzmann-Verteilung unterschieden wird.
Allgemeines zur Berechnung von Mittelwerten
Physikalische Größe A, deren Mittelwert A berechnet werden soll. Frage nach der
Wahrscheinlichkeit ∫ ( A) , dass sie Größe A im Intervall [ A, A + dA] auftritt:
Fläche: f ( A) ⋅ dA gibt diese
Wahrscheinlichkeit an. Gesamtfläche (=ˆ 100 % ) .
+∞
∫ f ( A) ⋅ dA = 1
−∞
Bei der angenommenen kontinuierlichen Verteilung ist dann
+∞
A=
∫ A ⋅ f ( A) ⋅ dA .
−∞
Die Geschwindigkeitsverteilung f(v) muss der Anforderung des Gleichverteilungssatzes der
kinetischen Energie gehorchen, wonach für Translationsbewegung (3 FG der Translation, 3 T)
gilt:
v2 =
3⋅ k ⋅T
.
m
Dies ist erfüllt durch die Maxwell – Boltzmann – Verteilungsfunktion (hinreichend
komplizierte Herleitung siehe Demtröder, Bd.1, ab S. 200) :
3
2
m ⋅ v2
m
2
f (v ) ⋅ dv =
⋅ 4 ⋅ π ⋅ v ⋅ exp −
⋅ dv,
2 ⋅π ⋅ k ⋅T
2 ⋅ k ⋅T
v max =
2 ⋅ k ⋅T
m
wahrscheinlichste Geschw.
v
=
8 ⋅ k ⋅T
,
π ⋅m
v2
=
3⋅ k ⋅T
m
Bemerkung: Diese Verteilungsfunktion ist nicht symmetrisch um 0, sondern hat ein
Maximum bei vmax, welche nicht die wahrscheinlichste Geschw. ist!
Energieverteilung : Man sucht nach einer Energieverteilungsfunktion f (E ) , welche die
Forderung des Gleichverteilungssatzes der kinetischen Energie erfüllen muss. Das ist die
Boltzmann – Verteilung mit der Wahrscheinlichkeit
E
∫ (E ) ⋅ dE = C ⋅ exp −
⋅ dE .
k ⋅T
∫ ∫(E ) ⋅ dE = 1 .
C ist eine Normierungskonstante, entsprechend der Forderung
Hat man ein System mit diskreten
Besetzungswahrscheinlichkeit Pn:
E
Pn = C ⋅ exp − n ,
k ⋅T
Energien
En
E
,
dann
gilt
− n
1
= Z = ∑ e k ⋅T = Zustandssumme.
C
n
für
die
Bei einer Verteilung von N = N 1 + N 2 Teilchen auf zwei Energieniveaus E1 und E2 gilt z. B.
N 1 P1
E − E2
∆E
=
= exp − 1
= exp −
N 2 P2
k ⋅T
k ⋅ T
10.4.
Boltzmann – Faktor.
Reale Gase
Bei realen Gasen werden weder Atom- bzw. Molekülvolumen, noch die WW durch
Anziehungs- und Abstoßungskräfte der Teilchen untereinander vernachlässigt. Reale Gase
können je nach Temperatur und äußerem Druck in versch. Phasen vorkommen.(Gas, fl.,
fest). Weitere Diskussion s. Wärmelehre.
Modell:
- Berücksichtigung des Eigenvolumens: Ersetze V → V − b
- intermolekulare Wechselwirkungen: ersetze p → p +
a
V2
Es folgt die modifiziere Gleichung für ein ideales Gas nach van der Waals:
a
P + 2 ⋅ (V − b ) = R ⋅ T
V
für n = 1 Mol
Die Maxwellsche Gerade kennzeichnet den Übergang von Gas zu Flüssigkeit. Bei hohen
Temperaturen ist das Verhalten wie beim idealen Gas; bei niedrigen Temperaturen gibt
es starke Abweichungen. Wichtig ist kritische Temperatur TK.
Definition : p K , VK , TK als horizontaler Wendepunkt der Kurve (zweite Ableitung d2/dT2).
p (V ) : dp dV = 0, d 2 p dV 2 = 0.
Bestimmung der Konstanten a, b:
b= 4NA*VA =[4faches Eigenvolumen der NA Moleküle im Molvolumen VM]
a
= pB = Binnendruck.
V2
11.
Strömende Flüssigkeiten und Gase
Bisher: Flüssigk. und Gase, die als Ganzes ruhen, deren makroskopischer Impuls
p = ∑ pi = 0 ist, obwohl sich die einzelnen Teilchen mit p ≠ 0 bewegen können.
Jetzt:
Strömende Fl. u. Gase (Hydrodynamik,Aerodynamik), relative Bewegung gegenüber
Gefäßwand bzw. fester Körper in Fl. und G., Bewegungen relativ langsam
(v < v Schall ) , von thermischer Bewegung absehen und nur mittlere Bewegung eines
Volumenelementes
11.1.
Grundbegriffe, Beschreibung von Strömungen
Volumenelement ∆V mit Masse ∆m = ρ ⋅ ∆V . Für strömende Fl. ist ρ zeitlich und räumlich
konstant(inkompressibel); für Gasströmung i. allg. nicht, aber für v << v Schall .
Vollst. Behandlung erfordert Kenntnis aller Kräfte, die auf ∆m wirken:
- Druckkräfte
- Schwerkraft
- Reibungskräfte bei Strömungen
r
r
r
Für jedes ∆m ist r (t ), v (t ), a (t ) anzugeben um die Bewegung der gesamten Flüssigkeit zu
r
beschreiben. Die Ortskurve r (t ) von ∆m heißt Stromlinie oder Stromfaden. Alle durch eine
Querschnittsfläche A gehenden Stromlinien bilden eine Stromröhre.
Versuch: Pohlscher Apparat
r r
Alle Werte für v (r , t ) bilden das Geschwindigkeits- (oder Strömungs-) Feld.
Stationäre Strömung
r r r
v = v (r , t/ ) , hängt nicht explizit von Zeit t ab.
Laminare Strömung
Stromfaden nicht durchmischt, keine Wirbel;
beschleunigenden Kräften. Ggt.: Turbulente Strömung
Reibungskräfte
groß
gegenüber
Versuch: Stromfädenapp.
Turbulente Strömung
Durchmischung, Verwirbelung, kleine Reibungskräfte
11.2.
Kontinuitätsgleichung
Fluss (Massenstromstärke) konstant: φ = const.
Querschnittsfläche erhöht sich die Geschwindigkeit
Bei
kleinerer
Flußänderung:
dφ = {
ρ ⋅
Dichte
r
v ⊥ ⋅ dt ⋅ dA
dt 43
142
besser: dΦ = ρ ⋅
Volumen d . Flüss. , die
während dt
r durch
Fläche dA tritt
v ⊥ = v ⋅ cos α
r r r
v ⊥ ⋅ dA = v ⋅ dA
r r
dφ = ρ ⋅ v ⋅ dA
dV
dt
durchflossener
11.3.
Strömung idealer Flüssigkeiten
11.3.1. Bernoulli* – Gleichung
Energiebilanz bei horizontalem Rohr (s. o.) ohne Beachtung der Reibung
Druckarbeit := Kinetischer Energiezuwachs
∆W1 = p1 ⋅ ∆V1 , ∆W2 = p 2 ⋅ ∆V2 , ∆V1 = ∆V2 = ∆V
(
)
1
∆W1 − ∆W2 = ⋅ ρ ⋅ ∆V ⋅ v 22 − v12
14243 2
14442444
3
Druckarbeit
Änd . d . Kin. Energie
∆W1 =Arbeit, die an bei A1 eintretender Fl. geleistet wird
∆W2 =Arbeit die an bei A2 austretender Fl. geleistet wird
∆W1 - ∆W2 =gesamte an Fl. verrichtete Arbeit
Nach Division mit ∆V :
p1 +
1
1
⋅ ρ ⋅ v12 = p 2 + ⋅ ρ ⋅ v 22 = const. = p 0
2
2
p+
1
⋅ ρ ⋅ v 2 = p0
2
p 0 : Gesamtdruck ( Stellen, wo v = 0)
1
⋅ ρ ⋅ v 2 : Staudruck
2
p = p 0 − p S : StatischerDruck
pS =
*s. o.
Daniel Bernoulli, * 2 9. 1.1700, 13. 3. 1782
* Droningen, Basel, Prof. in St. Peterburg u.
Basel
Versuche: Venturi – Düse,
Einbeziehung des Schweredrucks ρ ⋅ g ⋅ h :
p + ρ ⋅g ⋅h +
1
⋅ ρ ⋅ v 2 = const.
2
Die Bernoulli – Gleichung ist Ausdruck des Energiesatzes.
„Wo die Geschwindigkeit hoch ist, muss der Druck niedrig sein“
11.3.2. Druckmessung in strömenden Flüssigkeiten (Gasen)
a) Statischer Druck p:
Manometer (Drucksonde), wenn Fl. oder G. tangential an seitlichen Messöffnungen
vorbeiströmt
(Manometer, Steighöhe einer
Meßflüssigkeit
∆h, p = ρ ⋅ g ⋅ ∆h )
11.3.3. Anwendung und Beispiele zum Bernoullischen Gesetz
Folien, S. 126 a-c
11.4.
Laminare Strömung
z. B. Blut. Geschwindigkeit des Fluids in geg. Punkt ändert sich weder in Betrag noch in
Richtung.
12. Mechanische Schwingungen und Wellen
12.1 Schwingungen
12.1.1 Wiederholung:
Harmonische Schwingungen, mathematisches/physikalische Pendel, Federschwinger
∂ 2 x(t )
Jede physikalische Größe x(t) schwingt, wenn
= −ω 02 ⋅ x(t ) erfüllt ist.
2
∂x
Darstellung:
k
2π
(1)
x(t ) = A ⋅ cos(ω 0 ⋅ t + φ ) mit ω 0 =
=
T
m
x(t): Auslenkung zur Zeit t
T0 : Schwingungsdauer
A:
max. Ausl., Amplitude
ω 0 : Kreisfrequenz
φ:
"beliebige Phase"
(2)
Superpositionsprinzip:
Treffen mehrere Wellenberge aufeinander, so ergibt sich die resultierende Auslenkung
als Summe der Auslenkung der einzelnen Wellenberge:
x1 (t ) = A1 ⋅ cos(ω1 ⋅ t )
x 2 (t ) = A2 ⋅ cos(ω 2 ⋅ t )
(3)
x res (t ) = x1 (t ) + x 2 (t )
komplexe Darstellung:
x(t ) = c ⋅ e λ ⋅t
λ = i ⋅ a 0 komplexe Zahl
12.1.2 Gedämpfte, harmonische Schwingung
Die harmonische Schwingung wird unter realen Bedingungen gedämpft, so dass ihre
Amplitude mit der Zeit kleiner wird. Zur mathematischen Beschreibung wird der
Bewegungsgleichung ein zur Geschwindigkeit proportionaler Term hinzugefügt:
m ⋅ &x& = − k ⋅ x − R ⋅ x&
mit R=Reibungskraft
R
k
⇒ &x& + ω 02 ⋅ x + 2γ ⋅ x& = 0
mit 2γ = , ω 02 =
m
m
−γ ⋅t
Lösung: x(t ) = 1
A ⋅2
e 3 ⋅ cos(ω ⋅ t + φ )
Einhüllende
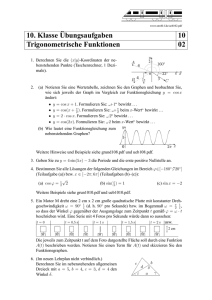
Schwach gedämpfte harm. Schwingung:
x(t ) = 1 ⋅ e −0.1⋅t ⋅ cos(1 ⋅ t )
x(t + T ) = x(t ) ⋅ e −γ ⋅T
Abb. 12.1
x(t )
γ ⋅ T = ln
x(t + T )
logarithmisches
Dämpfungsdekrement
a) Schwache Dämpfung: γ < ω 0
(unterdämpft)
ω = ω −γ > 0
2
1
2
0
2
x(t ) = A ⋅ e −γ ⋅t ⋅ cos(ω1 ⋅ t + φ )
(siehe Abb. 12.1)
b) Starke Dämpfung:
x(t ) = A ⋅ e λ ⋅t
bzw.
γ > ω0
mit λ1 / 2 = −γ ± i ⋅ ω 0
(überdämpft)
ω = γ −ω > 0
2
2
2
2
0
x(t ) = A ⋅ e λ ⋅t
λ1 / 2 = −γ ± γ 2 − ω 02 = −γ ± ω 2
mit
=> x(t ) = e −γ ⋅t ⋅ [c1 ⋅ e ω 2 ⋅t + c 2 ⋅ e ω 2 ⋅t ]
überdämpfte Schwingung:
nichtoszilierender Abfall zur Nulllage.
c) aperiodischer Grenzfall: γ = ω 0
γ = ω0
=> λ1 / 2 = −γ
(kritisch gedämpft)
(entartet)
Für kritische Dämpfung klingt die Amplitude "am schnellsten" ab
12.1.3 Erzwungene Schwingungen
Auf Masse m wirkt zusätzliche äußere Kraft Fa
2π
Fa = F0 ⋅ cos(ω ⋅ t )
ω=
= 2πv Kreisfrequenz
T
somit ergibt sich für die Bewegungsgleichung:
m ⋅ &x& = − k ⋅ x − R ⋅ x& + F0 ⋅ cos(ω ⋅ t )
bzw. durch m dividiert, die Differentialgleichung:
ω2 =
(*)
&x&(t ) + ω 02 ⋅ x(t ) + 2γ ⋅ x& = f cos(ω ⋅ t )
1444
424444
3 14243
a
b
k
m
ω 0 = Kreisfr. d. unged. Schwingung
R
2γ =
m
F
f = 0
m
ω1 = ω 02 − γ 2
Kreisfr. d. ged. Schwingung
(ohne äußere Kraft)
Lösungsweg:
Linker Teil von (*) lösen für "schwach" gedämpfte Schingung:
x(t ) = A1 ⋅ e −γ ⋅t ⋅ cos(ω1 ⋅ t + φ )
1444
424444
3
(a)
zusätzlicher Eimfluss d . rechten Teils (b)
144444444
42444444444
3
+
A2 ⋅cos(ω ⋅t )
al lg emeine Lösung ohne Kraft
(b)
1 spez. Lösung hinzufügen => damit allgem. Lösung d. Gesamtproblems
Also:
x(t ) = Einschwingvorgang + stationärer Vorgang
12.1.4 Energiebilanz bei einer Schwingung
betrachten die freie gedämpfte Schwingung:
m&x& + kx = − Rx&
| ⋅ x&
m&x& ⋅ x& + kx ⋅ x& = − Rx& 2
Zeige:
d m 2
x&
dt 2
d 2 dx& m
x& ⋅ ⋅
=
dt
dt 2
m
= 2 x& ⋅ &x& ⋅ = m&x& ⋅ x&
2
d m 2 k 2
2
x& + x = − Rx&
dt 2
2
( )
d
(Ekin + E pot ) = − Rx& 2
dt
t
Reibungswärme:
− ∫ Rx& 2 ⋅ dt
Energieverlust, Reibungswärme
0
Erzwungene Schwingung:
d
(Ekin + E pot ) = −12
R3
x& 2
dt
Integration
→ Re ibungswärme
+
F (t ) ⋅ x&
123
Integration
→ Zugeführte Energie
Erzwungene Schwingung: nach Abklingen der Einschwingvorgänge, d.h. für stationäre Lsg.
12.1.5 Überlagerung von Schwingungen
a) Schwingung in verschiedenen Richtungen
Eine Schwingung in x- und eine in y-Richtung gegeben:
x(t ) = x 0 ⋅ cos(ω ⋅ t )
Phasenverschiebung der
y (t ) = y 0 ⋅ sin(ω ⋅ t )
2
Schwingungen:
π
2
2
x y
+ = cos 2 (ω ⋅ t ) + sin 2 (ω ⋅ t ) = 1
x0 y 0
x0 ≠ y 0 : Ellipse
x0 = y 0 : Kreis
b) Schwebung
Überlagern sich 2 Schwingungen gleicher Amplitude und annähernd gleicher Frequenz, so
entsteht Schwebung:
s1 (t ) = a ⋅ cos(ω1 ⋅ t )
s 2 (t ) = a ⋅ cos(ω 2 ⋅ t )
s (t ) = s1 (t ) + s 2 (t ) = a ⋅ cos(ω1 ⋅ t ) + a ⋅ cos(ω 2 ⋅ t )
Additionstheorem:
ω −ω2
ω + ω2
= 2a ⋅ cos 1
⋅ t ⋅ cos 1
⋅t
2
2
144424443 1442443
Amplituden mod ulation
*:
γ =
ω1 + ω 2 1 ω1
⋅
≅
2
2π 2π
α − β
cos α + cos β = 2 ⋅ cos
2
α + β
⋅ cos
2
*
| ω1 ≈ ω 2
Abb. 12.2 zeigt die resultierende Schwebung (rot), die
von 2 Schwingungen (gelb,grün) mit gleicher
Amplitude (=1) und ähnlicher Kreisfrequenz
( ∆ω = 0.1 ) erzeugt wird.
Das An- und Abschwellen der Amplitude wird als
Amplitudenmodulation bezeichnet. γ ist die
Frequenz der Schwebung.
Abb. 12.2
12.1.6 Gekoppelte Schwingungen
3 Feder, 2 Massen,
Auslenkung aus Ruhelage (vgl Theo.Mechanik)
Betrachte nun die einzelnen auf die Massen m1 und m2 wirkenden Kräfte:
m1:
m2:
Rückstellkräfte:
F1 = − k1 ⋅ x1
F2 = −k 2 ⋅ x 2
zusätzliche Kraft:
F12 = −k12 ⋅ ( x1 − x 2 )
F21 = − F12 = − k12 ⋅ ( x 2 − x1 )
Die Summe der auf die einzelnen Massen wirkenden Kräfte führt auf die
Bewegungsgleichungen in Form eines Differentialgleichungssystems:
∑
∑
Kräfte auf m1 =
m&x&1 = − k1 ⋅ x1 − k12 ( x1 − x 2 )
Kräfte auf m2 =
m&x&2 = − k 2 ⋅ x 2 − k12 ( x 2 − x1 )
Gekoppeltes Pendel:
Verallgem. Koordinaten x1, x 2:
x1 = l1 ⋅ ρ1
x2 = l 2 ⋅ ρ 2
12.2
Mechanische Wellen
12.2.1 Darstellung von Wellen
Welle: zeitlich und räumlich
r r periodischer Vorgang, der durch
Wellenfunktion ξ( t , r ) beschrieben wird:
r r
r
ξ (t , r ) = A ⋅ f (u )
r
A = Amplitude der Welle
r r
u = ωt − k ⋅ r :
Phase der Welle
ω = 2πν :
r
k = kx ,ky ,kz :
Kreisfrequenz
f (u):
beliebige stetige, differenzierbare Funktion
f (u ) = cos u oder sin u :
harmonische Welle
(
)
Wellenzahlvektor, senkrecht zur Wellenfront,
Ausbreitungsrichtung der Welle
Zur Polarisation von Wellen:
Transversalwelle in z-Richtung
Teilchen schwingen in x-Richtung; harmonische Welle:
r r
r
ξ (t , r ) = A ⋅ e x sin(ωt − k z ⋅ z )
Longitudinalwelle in z-Richung
Teilchen schwingen in z-Richtung; harmonische Welle:
r r
r
ξ (t , r ) = A ⋅ ez sin(ωt − k z ⋅ z)
12.2.2
Wellengleichung
r r
Für die Funktion f(u), mit u = ωt − k ⋅ r , gilt die folgende Differentialgleichung
(Wellengleichung),
Beweis durch Differentiation:
2
2
2
2
&f& − ωr ∂ f + ∂ f + ∂ f = 0
2
∂y 2 ∂z 2
k 2 ∂x
r ωt 2π t 2π
=
=
k=
r
T r λ
2
r2
2π
2
2
2
k = kx + ky + kz =
λ
r
r ωt
dr ω
r= r ⇒
= r
dt k
k
r
ω2
dr
r 2 = v 2ph ,v ph =
:Phasengeschwindigkeit
dt
k
12.2.3
Wellenausbreitung in verschiedenen Medien
Elastische Longitudinalwellen in festen Körpern
v 2ph =
E
ρ
E: Elastizitätsmodul
v 2ph =
1− µ
E
ρ (1 + µ )(1 − 2µ )
dto., Querkontraktion berücksichtigt
ρ: Dichte des isotropen Mediums
Transversale Wellen in festen Körpern
v 2ph =
G
ρ
G: Torsions- oder Schermodul
Es gilt stets vph (longitudinal) > vph (transversal)
Transversale Wellen einer gespannten Saite
v 2ph =
F
µ
F: Kraft zur Saitenspannung
µ: Masse pro Längeneinheit
Schallwellen in Gasen
v 2ph
p: Druck
pχ
=
ρ
v ph (T) = v ph (T0 )
χ: Adiabatenexponent (s. Teil 2: Wärmelehre)
ρ: Dichte des isotropen Mediums
T
T0
Wellen in Flüssigkeiten
v 2ph =
K
ρ
K: Kompressionsmodul
(Beachte: Genauere Rechnung zeigt Dispersion, d.h.
Abhängigkeit der Größe vph von Wellenlänge)
12.2.4
Stehende Wellen
12.2.4.0 Einführung
Erzeugen eines stationäres Schwingungsmuster durch Überlagerung laufender
Wellen. Das Muster hängt ab von ω und von den Randbedingungen.
Bsp.
Überlagerung einer ebenen Welle in +z-Richtung mit einer solchen in -zRichtung:
ξ1 = A cos(ωt− kz ⋅ z + ϕ ) überlagert m it
ξ 2 = A cos(ωt− kz ⋅ z)
(Fall der Reflexion einer Welle)
ϕ
ϕ
ξ = ξ1 + ξ 2 = 2A cos kz ⋅ z − ⋅ cos ωt+
2
2
Das ist eine Schwingung, die periodisch vom Ort z (z > 0) abhängt, d.h. eine
stehende Welle.
Eine stehende Welle besitzt:
ϕ
• Nullstellen der Amplitude 2 A ⋅ cos k z ⋅ z − = 0
bei k z ⋅ z −
ϕ
π
2π
λ
[(2n + 1)π + ϕ ]
= (2n + 1) , k =
,d .h.z =
2
2
4π
λ
(Schwingungsknoten)
• Maximale Amplituden:
Bei k z z −
2
ϕ
= (nπ ) ,
2
z=
λ
[2nπ + ϕ ]
4π
Versuch: Seilwelle, Ausbreitung eines Impulses
12.2.4.1 Eigenschwingungen von schwingenden Luftsäulen
Es handelt sich hierbei eigentlich um stehende Wellen, die sich in solchen
Luftsäulen ausbilden können. Dadurch entstehen Eigenschwingungen, deren
Frequenzen mit der Länge der Luftsäule (z. B. Orgelpfeife, Blasinstrumente)
zusammenhängen.
a) Beidseitig geschlossene Säulen
Begriffe: Longitudinale Schwingung mit Schwingungsknoten (Orte mit
Luftbewegung) und Schwingungsbäuchen (Orte ohne Luftbewegung)
Es muß gelten:
λ
l= n ⋅ ,n ganz,n = 1,2,3
2
oder
λn =
2l
n
oder mit Ausbreitungsgeschwindigkeit: c = cLuft
νn =
c
nc
, G rundschw ingung n = 1
=
λ n 2l
ν1 =
c
λ
,l=
2l
2
b) Beidseitig offenen Luftsäule (nicht „gedackte“ Orgelpfeife)
Länge l
An beiden Seiten muß es Schwingungsbäuche geben:
l=
1
3
λ,λ, λ,2λ,L ⇒
2
2
nc
λ
l= n , ν n =
2
2l
n = 1,2,3,L
c) „gedackte“ Pfeife, einseitig offene Luftsäule
2n + 1
4l
λ 3λ 5λ
, , ,L ,
⋅ λ n = l,λ n =
4 4 4
4
2n + 1
c
c( 2n + 1)
,n = 0,1,2,3,L
νn =
=
4
l
λn
l=
12.2.4.2 Schwingende Stäbe (dünn, Saiten)
a) Beide Enden frei
λ
2l
c
nc
l= n ⋅ ,ν n = ,λ n = St = St, c = cStab,z.B.M etall
νn
2
2l
n
b) Einseitig eingespannt
c ( 2n + 1)
λ
4l
,ν n = St
l= ( 2n + 1) ,λ n =
4
2n + 1
4l
c) Beidseitig eingespannt
nc
λ
2l
l= n ⋅ ,ν n = ,λ n = St
2
n
2l
12.2.4.3 Eigenschwingungen von Platten, Membranen, Hohlräumen
vgl. Gerthsen, Kneser, Vogel
Abb. 4.55, 4.56, 4.57, 4.58, 4.59
12.3. Wellen bei bewegten Beobachtern
12.3.1. Doppler-Effekt
a) Bewegung einer Schallwelle Q relativ zum Medium (in dem sich Q bewegt)
und Beobachter B ruht.
Bewegt sich eine Schallquelle Q auf einen ruhenden Beobachter B zu, so vernimmt dieser
eine höhere Frequenz, als tatsächlich von der Quelle ausgesendet wird.
Q bewegt sich mit vQ ,
und sendet Wellen mit
λ0 aus.
λ B = λ0 − vQ ⋅ T
vQ
v
= Ph −
=λ
1
f0
T
Somit ergibt sich für die von Beobachter B wahrgenommene Frequenz f :
Q bewegt sich auf B zu. B ruht. Q bewegt sich von B weg. B ruht.
v
v Ph
v
v Ph
f = Ph = f 0 ⋅
f = Ph = f 0 ⋅
λ
v Ph − vQ
λ
v Ph + vQ
v Ph = Phasengeschwindigkeit der Welle im Medium
a) B bewegt relativ zu Q (ruht)
Bewegt sich Beobachter B auf die
ruhende Quelle Q zu, so nimmt er
ebenfalls eine erhöhte Frequenz wahr, da
er pro Zeiteinheit mehr Wellenberge
registriert, als von der Quelle in dieser
Zeiteinheit wirklich ausgesendet werden.
Die von B wahrgenommene Frequenz f setzt sich zusammen aus:
f = f 0 + ∆f ,
mit
∆f =
vB
λ0
und somit:
B bewegt sich auf Q zu. Q ruht. B bewegt sich von Q weg. Q ruht.
v
v
f = f 0 ⋅ 1 + B
f = f 0 ⋅ 1 − B
v Ph
v Ph
=
vB
⋅ f0
v Ph
c) Q und B bewegt
Bewegen sich Quelle Q und Beobachter B, so setzt sich f aufgrund der Überlegungen bei a)
und b) folgendermaßen zusammen:
v
1± B
v Ph
f = f0 ⋅
v
1 m Q
v Ph
Für die richtige Wahl des Vorzeichens ist folgendes zu merken:
Bewegen sich Quelle und Empfänger aufeinander zu, so wird die
beobachtete Frequenz größer (Zähler: + ; Nenner: -).
Entfernen sich Quelle und Empfänger voneinander, wird die Frequenz
kleiner (Zähler: - ; Nenner: +)
Die Frequenzverschiebung ∆f = f − f 0 wird als Dopplerverschiebung bezeichnet.
12.3.2. Schnell bewegte Quelle Q
a) vQ < v Ph
=> normale Situation (siehe 12.3.1)
b) vQ = v Ph
c) vQ > v Ph