9 Komplexe Zahlen
Werbung

9 Komplexe Zahlen
Die komplexen Zahlen bilden eine Erweiterung der reellen Zahlen, die sowohl für die
mathematische Theorie als auch in vielen Anwendungen eine zentrale Rolle spielt. Man
kann sagen, dass moderne Mathematik ohne komplexe Zahlen nicht möglich ist. Vieles
findet man in [SS09, 6.5].
Wie schon im letzten Semester muss die Erweiterung eines bekannten Zahlenbereich
gut motiviert sein. Dabei sollte es mit dem Bekannten verträglich sein — das ist das
Permanenzprinzip. Wir werden sehen, dass die komplexen Zahlen es erlauben Gleichungen zu lösen, die in R keine Lösung haben. Darüberhinaus bilden sie einen Körper. Es
gelten also die von den rationalen und den reellen Zahlen her bekannten Rechenregeln.
Der historische Zugang, seine Kritik und wie man’s richtig macht
Bereits auf den natürlichen Zahlen bestehen die zwei Verküpfungen „ +“ und „ ·“ und
es gelten die grundlegenden Rechengesetze: Assoziativgesetze, Kommutativgesetze, und
das Distributivgesetz.
Im letzten Semester haben wir sukzessive den Zahlbereich erweitert, stets motiviert
durch die Lösbarkeit weiterer Gleichungen.
Daraus ergibt sich die Hierarchie der Zahlen, die nochmals zusammengefasst sei
N ⊆ Z ⊆ Q ⊆ R.
Neben den Verknüpfungen besitzen diese Mengen alle eine verträgliche Anordnung „ <“.
Das drückt sich auch in der geometrischen Interpretation von R als Zahlengerade aus.
Bekanntlich gibt es keine reelle Zahl mit x2 = −1. Schon im 16. Jahrhundert wurde
dieser Mangel dadurch behoben, dass man eine imaginäre (eingebildete, nicht wirklich
existente) Zahl i postulierte, die diese Gleichung löst. Es soll also i2 = −1 gelten. Die
Einführung von i als neuer Zahl und die Verwendung des Buchstabens wird Leonhard
Euler1 (1707–1783) zugeschrieben.
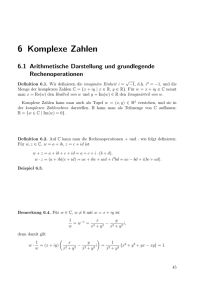
Als Lösung der quadratischen Gleichung x2 + px + q ergibt sich bekanntlich
r
p2
p
−q
x1/2 = − ±
2
4
Das haben wir im 1. Semester bewiesen. Ist
p2
4
− q < 0, so setzt man
....................................................................................
....................................................................................
....................................................................................
1
http://de.wikipedia.org/wiki/Leonhard_Euler
1
Die komplexen Zahlen werden definiert zu
C := {a + bi ; a, b ∈ R} .
So ist dann jede quadratische Gleichung über R lösbar in C.
Wie addiert und multipliziert man komplexe Zahlen? Für a + bi, c + di ∈ C setze
(a + bi) + (c + di) := a + c + (b + d)i
(a + bi) · (c + di) := ac − bd + (ad + bc)i.
Wenn man will, dass die grundlegenden Rechengesetze weiter gelten, und außerdem,
dass i2 = −1 gilt, so sind beide Definitionen zwingend!!
Beispiel. (5 + 2i) + (3 − 7i) =
und (5 + 2i) · (3 − 7i) =
Man rechnet mit viel Schreibarbeit nach, dass die Körperaxiome erfüllt sind. Wir
geben nur das multiplikative Inverse von a + bi ∈ C \ {0} an:
(a + bi)−1 =
a − bi
a
−b
= 2
+ 2
i
2
(a + bi)(a − bi)
a +b
a + b2
Das ist wohldefiniert, denn
Bemerkung. Merke Sie sich nicht die Formel für die Inverse, sondern die Art wie sie
hergeleitet wird.
Beispiel. (3 −
√ −1
2i) =
1
√ =
3 − 2i
Wo ist das Problem?
Die „Zahl“ i fällt vom Himmel. Es ist nicht klar, wo sie herkommt und ob sich evtl.
Widersprüche ergeben. Dass man nicht beliebig definieren kann zeigt folgender Versuch.
Wir wollen die Gleichung 0 · j = 1 lösen. Geht das? Wenn das Distributivgesetz gelten
soll, dann hat man
1 = 0 · j = (0 + 0) · j = 0 · j + 0 · j = 1 + 1 = 2.
Das ist ein Widerspruch! Siehe auch § 2
Auch mit Kommutativ- und Assoziativgesetz ergibt sich ein Widerspruch:
1 = 0j = (0a)j = 0(aj) = 0(ja) = (0j)a = 1a = a für alle a ∈ R.
Aus diesem Grund muss man vorsichtiger vorgehen:
(9.1) Definition. Man setzt C := R × R und definiert
(a, b) + (c, d) := (a + c, b + d)
(a, b) · (c, d) := (ac − bd, ad + bc).
(C, +, · ) heißt Körper der komplexen Zahlen.
2
Bemerkung. Hier ist klar, dass „ +“ und „ ·“ Verknüpfungen auf C sind, also Abbildungen C × C → C.
Man erkennt, dass
....................................................................................
....................................................................................
....................................................................................
....................................................................................
....................................................................................
....................................................................................
....................................................................................
Die Elemente (u, 0) verhalten sich genau wie reelle Zahlen. Präziser:
(u, 0) + (v, 0) = (u + v, 0) und (interessanter) (u, 0) · (v, 0) = (uv, 0)
Bemerkung. Noch genauer: Die Abbildung R → C; u 7→ (u, 0) ist ein injektiver RingHomomorphismus. Was bedeutet das?
Daher wird das Element der Form (u, 0) mit der reellen Zahl u identifiziert. Etwas
plakativ ausgedrückt: Wir schreiben statt (u, 0) kurz u. Setzt man weiter i := (0, 1)
(wir haben i jetzt definiert!!), so erhält man
(a, b) = (a, 0) + (0, b) = a + (b, 0) · (0, 1) = a + bi.
Damit haben wir die historische Darstellung wiedergefunden und gleichzeitig das anfanges beschriebene Vorgehen gerechtfertigt.
Wir fassen zusammen
(9.2) (C, +, · ) bildet einen Körper, der den Körper der reellen Zahlen enthält.
3
Beweis. Die neutralen Elemente wurden oben angegeben, ebenso das Inverse bezüglich
der Multiplikation. Wie sieht das Inverse bezüglich der Addition aus?
Die Kommutativgesetze für Addition und Multiplikation sind offensichtlich.
Assoziativgesetz der Addition (in der Paar-Schreibweise):
(a1 , a2 ) + (b1 , b2 ) + (c1 , c2 )
= (a1 + b1 ) + c1 , (a2 + b2 ) + c2 = a1 + (b1 + c1 ), a2 + (b2 + c2 )
= (a1 , a2 ) + (b1 , b2 ) + (c1 , c2 ) .
Dabei wird nur das Assoziativgesetz der Addition in R benutzt.
Assoziativgesetz der Multiplikation:
(a1 + a2 i)(b1 + b2 i) (c1 + c2 i)
= a1 b1 c1 − a2 b2 c1 − a2 b1 c2 − a1 b2 c2 + (a1 b1 c2 + a1 b2 c1 + a2 b1 c1 − a2 b2 c2 )i
= (a1 + a2 i) (b1 + b2 i)(c1 + c2 i) .
Das Distributivgesetz kann analog nachgerechnet werden. Wir werden später einen eleganteren Beweis sehen.
Geometrische Deutung der Addition komplexer Zahlen: Die Definition der Menge
C als R2 legt es nahe, komplexe Zahlen als Punkte der Anschauungsebene zu interpretieren.
Die Addition komplexer Zahlen entspricht genau
die Addition der „Vektoren“. Insbesondere ist die
Abbildung C → C; z 7→ z + v für v ∈ C eine
Translation oder Verschiebung.
Man erkennt in der nebenstehenden Skizze, dass
die Dreiecke O, z1 , z und v, B, z 0 kongruent sind.
Daher ist die Länge der Strecke {v, B} genau z1
und es gilt z10 = v1 + z1 (hier sind Vorzeichen zu
beachten!). Entsprechend hat man z20 = v2 + z2 .
Das bedeutet, dass die geometrische Konstruktion einer Translation genau auf die Addition von
„Vektoren“ führt.
Wir halten außerdem fest
(9.3) (R2 , +) mit komponentenweiser Addition ist eine kommutative Gruppe.
Grundbegriffe
(9.4) Definition. Gegeben sei die komplexe Zahl z = a + bi.
4
.
a heißt Realteil, b Imaginärteil von z . Man schreibt a = Re z und b = Im z .
.
z := a − bi heißt die komplex Konjugierte von z .
.
Die Abbildung
: C → C ; z 7→ z wird komplex Konjugieren genannt.
√
|z| := a2 + b2 heißt der (Absolut-)Betrag von z .
.
VORSICHT. Der Imaginärteil ist eine reelle Zahl! Im(a + bi) = b nicht etwa bi.
(9.5) Bemerkung. 1.) In der „richtigen“ Definition sind Real- und Imaginärteil einfach
die x- bzw. y -Koordinate. Eine komplexe Zahl z ist genau dann reell, wenn der
Imaginärteil Im z = 0 ist.
2.) Geometrisch ist das komplex Konjugieren
Insbesondere ist eine komplexe Zahl z genau dann reell, wenn z = z .
3.) Es gilt offenbar
z · z̄ = |z|2
(Nachrechnen!).
4.) Der Betrag |z| gibt den Abstand von z ∈ C vom Nullpunkt an (Satz des Pythagoras).
5.) Allgemeiner ist |z2 − z1 | der Abstand zwischen den komplexen Zahlen z1 und z2 .
6.) Ist z ∈ C eine reelle Zahl, so stimmt die Definition
√ des Betrags aus § 2 mit der hier
gegeben überein. Es ist ja z = a + 0i, also |z| = a2 = |a|.
7.) Sei x2 + px + q ein Polynom mit nicht-reeller Nullstelle α, dann ist ᾱ die andere
Nullstelle. Komplexe Nullstellen treten also in Paaren komplex Konjugierter auf.
Das komplex Konjugierte hat eine wichtige Eigenschaft, die wir schon mehrfach in
verschiedenen Kontexten gesehen haben.
(9.6) Für alle z, w ∈ C gilt
z = z,
z+w =z+w
und z · w = z · w.
Beweis. Wir rechnen nur die dritte Formel nach. Dabei scheiben wir z = x + yi und
w = a + bi
z · w = (xa − yb) + (xb + ya)i = (xa − yb) − (xb + ya)i
= (x − yi)(a − bi) = z · w.
(9.7) Bemerkung. Der Satz besagt, dass komplexes Konjugieren ein Homomorphismus bezüglich der Addition und der Multiplikation ist. Außerdem ist es eine bijektive
Abbildung. Welches ist die Umkehrabbildung?
Man spricht von einem Automorphismus des Körpers. Diese Abbildung erhält nämlich die Struktur von C.
5
Homomorphismen (also „Strukturerhaltende“ Abbildungen) sind uns im letzten Semester schon einige Male begegnet, und sie werden uns auch in Zukunft immer wieder
begegnen, z. B. auch im folgenden Satz — an welcher Stelle?
Wir notieren wichtige Eigenschaften des Betrags für komplexe Zahlen. Es sind dieselben Eigenschaften, die wir für reelle Zahlen in (2.9) kennengelernt haben.
(9.8) Für alle z1 , z2 ∈ C gilt:
(1)
|z1 | ≥ 0; |z1 | = 0 gilt genau dann, wenn z1 = 0.
(2)
|z1 z2 | = |z1 | |z2 |
z1 |z1 |
=
(z2 6= 0)
z2 |z2 |
(3)
(4)
|z1 + z2 | ≤ |z1 | + |z2 |
(5)
|z1 − z2 | ≥ |z1 | − |z2 |.
(Dreiecksungleichung)
Beweis. (1) ist klar.
(2) Mit (9.5.3) rechnet man
s
p
p
p
!
|z1 z2 | = z1 z2 z1 z2 = z1 z1 · z2 z2 = z1 z1 z2 z2 = |z1 | |z2 | .
|{z} |{z}
∈R≥0
∈R≥0
(3) und (5) wie im Beweis zu (2.9).
(4) soll hier nicht ausgeführt werden.
(9.9) Bemerkung. 1.) Der Name Dreiecksungleichung hat einen geometrischen Hintergrund. In einem Dreieck ist die Summe der Längen zweier Seiten immer mindestens so groß wie die Länge der dritten Seite. Daher findet man die Dreiecksungleichung auch in der Gestalt
|z1 − z3 | ≤ |z1 − z2 | + |z2 − z3 | für alle z1 , z2 , z3 ∈ C.
2.) Die Aussagen (1) – (3) kann man auch so ausdrücken:
Die Abbildung C → R≥0 ; z 7→ |z| ist
.
Wie wir wissen, sind Q und R angeordnete Körper. Dies gilt für C nicht:
(9.10) Es gibt keine Anordnung auf C, die die Monotoniegesetze erfüllt.
Beweis. Angenommen, < ist eine Anordnung auf C, die die Montoniegesetze erfüllt. Aus
(2.8.4) folgt 0 < i2 = −1. Da aber nach (2.8.5) auch 0 < 1 gilt, folgt 0+0 < (−1)+1 = 0
— ein Widerspruch.
(9.11) Bemerkung. 1.) Natürlich ist die vorletzte Aussage im Beweis auch ein Widerspruch zur Trichotomie. Die hätte man aber auch aufgegeben, wenn man die
Monotoniegesetze hätte retten können.
2.) Man kann auch den Körper der komplexen Zahlen nochmals erweitern, zum Schiefkörper der Quaternionen H. Dabei geht wieder eine wichtige Eigenschaft verloren,
nämlich die Kommutativität der Multiplikation.
6
Polarkoordinaten
Wir haben gesehen, dass wir die komplexen Zahlen als Punkte der Anschauungsebene
auffassen können.
Carl Friedrich Gauß2 (1777–1855) war der erste, der diese Interpretation benutzt hat,
daher spricht man von der Gaußschen Zahlenebene.
Weil i die Einheitsstrecke auf der imaginären Achse (d. i. die y -Achse) definiert,
wird i auch imaginäre Einheit genannt. Die x-Achse heißt dann auch reelle Achse.
Das nächste Ziel ist eine geometrische Deutung der Multiplikation komplexer Zahlen.
Beispiel. Wir betrachten die Abbildung δ : C → C; z 7→ iz . Es stellt sich heraus, dass
δ
....................................................................................
....................................................................................
....................................................................................
Es sei z = a + ib 6= 0 eine komplexe Zahl, r = |z| sei der Betrag von z , d. h. der
Abstand von z zum Koordinatenursprung. Mit ϕ bezeichnen wir den Winkel zwischen
der positiven x-Achse und dem „Vektor“ z , gemessen im mathematisch positiven Sinn,
d. h. entgegen des Uhrzeigersinns. Wir können ϕ in Grad oder im Bogenmaß angeben.
Falls Sie es nicht aus Ihrer Schulzeit wissen: Das Bogenmaß eines Winkels α ∈ [0◦ , 360◦ [
ist die Länge des zugehörigen Einheitskreisbogens.
Beispiel. Zum Winkel 90◦ gehört das Bogenmaß
π
2
. Welche Gradzahl gehört zu 2π ?
Ab jetzt werden wir Winkel weitgehend im Bogenmaß angeben.
Zwischen ϕ, r, a und b besteht der Zusammenhang3
cos ϕ =
a
r
und
sin ϕ =
b
=⇒ z = a + ib = r cos ϕ + i r sin ϕ = r(cos ϕ + i sin ϕ)
r
Diese Beziehung gilt für alle a, b ∈ R (nicht beide Null).
(9.12) Beispiele. 1.) z = 4 − 3i: Es ist r = 5, cos ϕ = 54 , sin ϕ = − 35 =⇒ ϕ ≈ 323◦
bzw. ϕ ≈ 5.637.
2
3
http://de.wikipedia.org/wiki/Gauss
Wir verzichten auf eine exakte Einführung der Winkelfunktionen und benutzen die in der Schule
übliche Definition.
7
√
2.) ϕ = 34 π, r = 2 2: Dann ist
a = r cos ϕ =
und
b = r sin ϕ =
Damit ist
Definition. Man nennt das Paar (r, ϕ) die Polarkoordinaten des Punktes bzw. der
komplexen Zahl z , wenn z = r(cos ϕ + i sin ϕ).
Der Winkel ϕ wird auch das Argument von z genannt.
Man beachte, dass ϕ im Fall z = 0 beliebig ist!
Bemerkung. Koordinatenangaben durch Winkelgrößen sind beispielsweise in der Geografie üblich; die Lage eines Ortes wird durch zwei Winkel festgelegt.
Hamburg hat die Koordinaten 9◦ 590 östlicher Länge und 53◦ 330 nördlicher Breite;
Berlin hat 13.4◦ östliche Länge und 52.5◦ nördliche Breite.
Da der Einheitskreis in beiden Richtungen auch mehrfach durchlaufen werden kann
(Winkel werden „modulo 2π “ gemessen), sind die Winkelfunktionen Sinus und Cosinus
für jede reelle Zahl definiert, als Bilder kommen nur Werte aus dem Intervall [−1, 1] in
Frage, also
sin : R → [−1, 1] und cos : R → [−1, 1].
y
1
-1
1
2
3
4
5
6
7
8
9
x
-1
Fragen: Welche der beiden Kurven stellt die Sinusfunktion dar? Ist sie injektiv oder
surjektiv?
Wir fassen einige (bekannte) Eigenschaften der Funktionen sin und cos zusammen,
die wir brauchen werden. Bewiesen werden sie im nächsten Semester.
(9.13) Für alle x, y ∈ R gilt
8
(1) sin(−x) = − sin x und
cos(−x) = cos x.
(2) sin(x + y) = sin x cos y + cos x sin y
und
cos(x + y) = cos x cos y − sin x sin y.
Die Formeln in (2) werden Additionstheoreme für Sinus und Cosinus genannt.
Zurück zur Multiplikation komplexer Zahlen!
(9.14) Es sei z1 = r1 (cos ϕ1 + i sin ϕ1 ) und z2 = r2 (cos ϕ2 + i sin ϕ2 ). Für das Produkt
z1 · z2 gilt dann:
z1 z2 = r1 r2 cos(ϕ1 + ϕ2 ) + i sin(ϕ1 + ϕ2 ) .
Beweis. Das folgt direkt aus den Additionstheoremen:
z1 z2 = r1 (cos ϕ1 + i sin ϕ1 ) · r2 (cos ϕ2 + i sin ϕ2 )
= r1 r2 cos ϕ1 cos ϕ2 − sin ϕ1 sin ϕ2 + i(cos ϕ1 sin ϕ2 + sin ϕ1 cos ϕ2 )
= r1 r2 cos(ϕ1 + ϕ2 ) + i sin(ϕ1 + ϕ2 ) .
Formuliert man das Ergebnis in Worten, so erhält man die
Geometrische Deutung der Multiplikation komplexer Zahlen: Bei der Multiplikation komplexer Zahlen werden die Beträge multipliziert und die Winkel addiert.
Nochmal das
Beispiel. δ : C → C ; z 7→ iz : Ist z = r(cos ϕ + i sin ϕ), so folgt
!
!
π
π
π
π
iz = cos
r(cos ϕ + i sin ϕ) = r cos ϕ +
.
+ i sin
+ i sin ϕ +
2
2
2
2
Das ist tatsächlich eine Drehung um den Winkel π2 um 0.
Frage: Wie kann man eine Drehung um π3 realisieren?
Wir schreiben jetzt zur Abkürzung (und als Vorgriff auf Erkenntnisse des kommenden
Semesters)
eiϕ = cos ϕ + i sin ϕ für ϕ ∈ R.
Mit z 7→ ez ist wirklich die Exponentialfunktion gemeint, die Sie aus der Schule für
reelle Argumente kennen (sollten!). Bei richtiger Definition aller beteiligter Funktionen
lässt sich diese Eulersche Formel beweisen.
Mit dieser Bezeichnung folgt direkt aus (9.14)
(9.15) ei(ϕ+ψ) = eiϕ · eiψ .
Diese Formel kennen Sie für die reelle Exponentialfunktion in der Form eiϕ+iψ =
e · eiψ . Beachten Sie, dass diese Schreibweise noch keinen Sinn macht!
iϕ
9
Bemerkung. (9.15) liefert einen weiteren Beweis für (−1)(−1) = 1: Es ist −1 = eiπ ,
also
(−1)(−1) = eiπ eiπ = ei 2π = 1.
Wir untersuchen jetzt wie komplex Konjugieren, Invertieren und Bilden von Potenzen
in Polarkoordinaten aussehen.
(9.16) Sei z = reiϕ ∈ C und k ∈ Z. Dann gilt
z −1 = r−1 ei(−ϕ) ,
z̄ = rei(−ϕ) ,
und z k = rk eikϕ .
!
Beweis. z̄ = r̄ · (cos ϕ − i sin ϕ) = r · (cos(−ϕ) + i sin(−ϕ)) = rei(−ϕ) mit (9.13.1).
z −1 =
1
1
1
= z̄ = 2 rei(−ϕ) = r−1 ei(−ϕ) .
z
z z̄
r
Für k = 0 und k = 1 ist die Behauptung klar; k ≥ 2 folgt sie mit Induktion aus
(9.14).
Es sei nun k < 0. Dann gilt mit dem bereits gezeigten
−k −k
z k = z −1
= r−1 ei(−ϕ)
= r(−1)(−k) ei(−k(−ϕ)) = rk eikϕ .
Mit Hilfe des letzten Satzes können wir alle komplexen Lösungen der Gleichung z n = 1
konstruieren: Man zeichne in den Einheitskreis ein regelmäßiges n–Eck mit einer Ecke
in (1, 0). Genau jede der n Ecken liefert uns eine Lösung.
Beispiel. n = 4 =⇒ z1 = 1, z2 = i, z3 = −1, z4 = −i.
Algebraisch ausgedrückt, sieht die Menge En der Lösungen der Gleichung z n = 1 wie
folgt aus
o
n k
En = ei n 2π ; k ∈ {0, . . . , n − 1} .
Vgl. das mit dem Beispiel.
(9.17) Bemerkung. (En , · ) bildet eine Gruppe, die Gruppe der n-ten Einheitswurzeln. Vgl. dazu die Übungen.
In analoger Weise können auch Gleichungen der Art z n = a + ib gelöst werden.
Aufgabe : Sei n ∈ N und z = a + ib ∈ C gegeben, gesucht sind alle zk mit zkn = a + ib.
Lösung : Wir suchen zk = rk eiϕk mit zkn = rkn einϕk = a + ib = reiϕ .
√
1. Alle Lösungen haben den gleichen Betrag rk = n r .
√ 1
2. Eine Lösung ist einfach anzugeben: z0 = n rei n ϕ .
3. Sämtliche Lösungen sind Ecken√
eines regelmäßigen n–Ecks, eingezeichnet in den Kreis
um den Ursprung mit Radius n r und einer Ecke in z0 .
10
√
ϕ
k
2π
zk = z0 ei n 2π = n rei( n +k n ) für k = 0, . . . , n − 1.
Beispiel. z 3 = 2i = 2 cos π2 + i sin π2 . Gemäß 2. ist
4. Die Lösungen sind
z0 =
√
3
π
π
2 cos + i sin
6
6
=
√
3
2
1√
1
3+ i .
2
2
Als weitere Lösungen erhält man
√
√
π 2π
π 2π
1√
1
3
3
z1 =
) + i sin( +
) = 2 −
2 cos( +
3+ i
6
3
6
3
2
2
√
√
π
2π
π
2π
3
3
z2 =
2 cos( + 2 ·
) + i sin( + 2 ·
) =− 2·i
6
3
6
3
(9.18) Bemerkung. Man nennt die Gleichung (cos ϕ+i sin ϕ)m = cos(mϕ)+i sin(mϕ),
m ∈ Z auch Moivresche Formel. In unserer abkürzenden Schreibweise lautet sie
m
eiϕ = ei(mϕ) .
Polynome
Wir befassen uns im Folgenden mit Polynomen über einem beliebigen Körper K . Sie
sollten dabei vor allem an Q, R und C denken. Die Aussagen gelten aber (im Wesentlichen) auch z.B. für Zp mit einer Primzahl p.
Ein Polynom über dem Körper K (es darf auch ein Ring sein!) ist ein Ausdruck der
Form
n
X
n
n−1
f = an x + an−1 x
+ · · · + a1 x + a0 =
ak xk mit ak ∈ K .
k=0
Dabei wird x als Variable aufgefasst, für die man beliebige Elemente aus K (oder
auch Elemente eines K umfassenden Körpers) einsetzen kann. Die ak werden Koeffizienten des Polynoms genannt. Sind alle Koeffizienten = 0, so spricht man vom
Nullpolynom und schreibt f = 0.
Im Fall an 6= 0 nennt man n den Grad von f . Wir schreiben kurz Grad(f ) = n.
Der Koeffizient an heißt dann auch Leitkoeffizient. Der Grad des Nullpolynoms wird
−∞ gesetzt. Einen Leitkoeffizienten besitzt das Nullpolynom nicht. Ein Polynom heißt
konstant, wenn der Grad 0 oder −∞ ist. Es ist dann f = a0 und Einsetzen liefert in
jedem Fall a0 , eben eine Konstante.
Die Menge aller Polynome über K wird mit K[x] bezeichnet.
Bemerkung. Gelegentlich benutzen wir auch andere Namen für die Variable, z.B. z
oder t. Dann schreiben wir auch K[z] oder K[t].
(9.19) Beispiele. 1.) f := 2x3 + 4x2 + x − 7 ∈ R[x] ist ein Polynom über R mit
und Leitkoeffizient
. Es kann aber sogar als Polynom über
Grad(f ) =
Z aufgefasst werden. Wir setzen einige Werte ein:
√
f (1) = . . . , f ( 2) = . . . , f (i) = . . .
11
2.) g := z 2 +2(1+i)z+i ist ein Polynom über C. Es gilt Grad(g) = 2. Der Leitkoeffizient
ist 1.
3.) Sei K = Z5 , dann ist x3 + 3 x2 + 2 x + 4 ein Polynom über Z5 .
Zu einem Polynom f ∈ K[x] mit K ∈ {Z, Q, R, C} heißt jedes Element α ∈ C
Nullstelle, wenn f (α) = 0. An dieser Stelle sei nochmals betont, dass α nicht aus K
stammen muss.
Beispiel (Fortsetzung von (9.19)). 1.) Man erkennt, dass
√ 1 Nullstelle des Polynoms
5
3
f ist. Eine einfache Rechnung zeigt, dass auch − ±
i Nullstellen sind. Gibt es
2
2
weitere?
2.) Wir bestimmen die Nullstellen von g mit quadratischer Ergänzung:
z 2 + 2(1 + i)z + i = z 2 + 2(1 + i)z + (1 + i)2 + i − (1 + i)2
!
⇐⇒
(z + (1 + i))2
= (z + (1 + i))2 − i = 0
= i.
Gesucht sind also komplexe Zahlen mit w2 = i. Dazu nutzen wir die Polarzerlegung
von i. Es gilt nämlich
√
√
π
π
π
π
2
2
i = ei 2 =⇒ w1 = ei 4 = cos + i sin =
+
i
4
4√
2√
2
π
2
2
−
i
w2 = ei( 4 +π) = −w1 = −
2
2
Insgesamt ergeben sich die beiden Nullstellen zu
√
√
√
√
2
2
2−2
2−2
z1 = −(1 + i) +
+
i=
+
i
√2
√2
√2
√2
2
2
2+2
2+2
z2 = −(1 + i) −
−
i=−
−
i
2
2
2
2
3.) 1 ∈ Z5 ist Nullstelle des Polynoms x3 + 3 x2 + 2 x + 4.
4.) Wir bestimmen die Nullstellen des Polynoms x2 + 3x + 2 über Z7 .
Bemerkung. Ähnlich wie in 2.) kann man die Nullstellen eines jeden quadratischen
Polynoms über C finden.
Man kann Polynome addieren und multiplizieren. Da diese VerknüpfungenPmit dem
Einsetzen verträglich sein sollen, ergeben sich folgende Regeln. Es seien f = nk=0 ak xk
12
und g =
Pm
k=0 bk x
k
, dann sei
max(n,m)
f + g :=
X
(ak + bk )xk
und
k=0
f · g :=
n+m
X
k=0
k
X
a` bk−` xk
`=0
Diese Formeln ergeben sich durch distributives Ausmultiplizieren und Sammeln aller
Terme mit dem gleichen Grad.
Beispiel. (a3 x3 + a2 x2 + a1 x + a0 ) · (b2 x2 + b1 x + b0 ) = . . .
Es gilt
(9.20) Satz. (K[x], +, · ) ist ein Ring.
Der Beweis ist etwas länglich aber nicht schwer. Er kann hier der geneigten Leserin
überlassen werden. Aus der Definition ergibt sich direkt der
(9.21) Gradsatz. Für Polynome f, g ∈ K[x] gilt
Grad(f + g) ≤ max Grad(f ), Grad(g)
und Grad(f · g) = Grad(f ) + Grad(g).
Der Leitkoeffizient von f · g ist das Produkt der Leitkoeffizienten von f und g .
Von fundamentaler Bedeutung ist (wie für Z) die
(9.22) Division mit Rest. Es seien f, g ∈ K[x] mit g 6= 0, dann existieren eindeutig
bestimmte Polynome q, r ∈ K[x] mit f = q · g + r und Grad(r) < Grad(g).
Beweis. Existenz: Wir betrachten die Menge M := f − h · g ; h ∈ K[x] und wählen
daraus ein Element r ∈ M mit möglichst kleinem Grad. Es gilt dann r = f − q · g
mit q ∈ K[x]. Angenommen, k = Grad r ≥ m = Grad g ≥ 0. Es seien uk und bm die
Leitkoeffizienten von r bzw. g . Wir betrachen das Polynom
−1
k−m
−1
k−m
−1
k−m
s := r − bm uk x
· g = f − q · g − bm uk x
· g = f − q + bm uk x
· g ∈ M.
Nun gilt aber nach Konstruktion Grad s < k und das ist ein Widerspruch zur Wahl
von r .
Eindeutigkeit: Es sei f = q 0 · g + r0 mit Polynomen q 0 , r0 aus und Grad r0 < Grad g .
Dann gilt
q · g + r = q 0 · g + r0 ⇐⇒ (q − q 0 ) · g = r0 − r.
Wäre q 6= q 0 , also q − q 0 6= 0, so folgte mit (9.21) Grad(r0 − r) < Grad(g) aber
Grad((q − q 0 ) · g) = Grad(q − q 0 ) + Grad(g) ≥ Grad(g);
ein Widerspruch. Gilt aber q = q 0 , so folgt direkt r = r0 .
13
Bemerkung. Der Beweis verläuft sehr ähnlich zum Beweis von (5.1) für N. Es gibt
viele Analogien zwischen den Ringen Z und K[x].
Ein der wichtigsten Anwendungen ist das Abspalten von Linearfaktoren. So wird
das Polynom x − α aus dem folgenden Satz genannt.
(9.23) Satz. Es sei f ∈ K[x] ein Polynom mit der Nullstelle α. Dann existiert ein
Polynom g mit f = g · (x − α). Es gilt Grad(g) = Grad(f ) − 1.
Beweis. Im Fall f = 0 ist die Aussage trivial: g = 0.
Andernfalls führen wir eine Division mit Rest durch. Es existieren also Polynome g, r
mit f = g · (x − α) + r und Grad(r) < 1. Dann gilt also r = r0 ∈ K .
....................................................................................
....................................................................................
....................................................................................
....................................................................................
....................................................................................
....................................................................................
....................................................................................
Das zeigt die Behauptung.
(9.24) Bemerkung. Der Beweis zeigt auch eine Methode, wir man sukzessiv Nullstellen
eines Polynoms f bestimmt.
1.
Nullstelle finden
2.
durch Polynomdivision Linearfaktor abspalten f = g · (x − ...)
3.
weiter mit g
Das Verfahren bricht ab, weil Grad(g) < Grad(f ).
Die eigentliche Schwierigkeit ist der erste Schritt! Hier helfen über R oder C in den
meisten Fällen nur Näherungsverfahren.
14
(9.25) Folgerung. Jedes Polynom f 6= 0 hat höchsten Grad(f ) Nullstellen.
Beweis. Induktion nach Grad(f ) unter Verwendung von (9.23).
Beispiel. Wir bestimmen die Nullstellen des Polynoms x3 − x2 − x + 1.
(9.26) Bemerkung. 1.) Es sei f ein Polynom mit der Nullstelle α. Man sagt α sei
eine k -fache Nullstelle, k ∈ N, wenn es ein Polynom g gibt mit f = g · (x − α)k
und g(α) 6= 0.
2.) Die Zahl k heißt die Vielfachheit der Nullstelle α. Man sagt auch, man könne den
Linearfaktor (x − α) k -mal abspalten.
Den vielleicht bedeutendsten Satz über die komplexen Zahlen werden wir leider nicht
beweisen können. Wir haben gesehen, dass alle quadratischen Polynome und alle Polynome der Form z n − w in C Nullstellen besitzen. Es gilt der sehr viel weiter reichende
(9.27) Fundamentalsatz der Algebra. Jedes nicht konstante Polynom mit Koeffizienten aus C hat mindestens eine Nullstelle in C.
Beweis. Siehe [Hen03, 4.4].
Wendet man nun (9.24) mehrfach an, so erhält man
(9.28) Folgerung. Jedes nicht konstante Polynom f ∈ C[x] besitzt eine eindeutig bestimmte Darstellung der Form f = an (x − α1 ) · · · · · (x − αn ), wobei an der Leitkoeffizient
von f ist, und αk ∈ C die (evtl. mehrfach gezählte) Nullstellen von f .
Bemerkung. 1.) Man sagt auch: Jedes Polynom über C lässt sich in Linearfaktoren
zerlegen.
2.) Diese Zerlegung ist analog zur Primfaktorzerlegung für ganze Zahlen.
Der schönste Satz
Im Jahre 1990 wurde in der Zeitschrift The Mathematical Intelligencer eine Rangliste
der schönsten Sätze der Mathematik veröffentlicht. Sie ging aus einer Art Umfrage unter
Mathematikern hervor. Mit knappem Vorsprung landete auf dem ersten Platz:
eiπ = −1,
häufig auch in der Form eiπ + 1 = 0
zu sehen, in der die wichtigsten Konstanten der Mathematik 0, 1, e, π, i zusammenwirken.
15
Kurven
Mit Polarkoordinaten kann man viele interessante Kurven in der Ebene einfach darstellen. Wir untersuchen nur einige Beispiele.
Die typische Form ist r = r(α) mit Polarkoordinaten (r(α), α) und kartesischen
Koordinaten (r(α) cos α, r(α) sin α), bzw. als komplexe Zahl aufgefasst
r(α) cos α + ir(α) sin α = r(α)(cos α + i sin α) = r(α)eiα .
Dabei ist α der Parameter, also eine Variable, die durch eine Teilmenge reeller Zahlen
läuft. Man kann sich α auch als Zeit vorstellen und den Punkt r(α)eiα als Teilchen, das
sich in der Ebene entlang der Kurve bewegt.
Die Archimedische Spirale wird vielfach angewendet. Rollt man etwa ein Band auf
einen Zylinder, so entsteht eine. Auch die alten Vinyl-Schallplatten nutzten sie.
Problem: Man soll eine Kurve (z.B. die Rille auf einer Schallplatte) in die Ebene zeichnen, die sich spiralig um den Ursprung windet so, dass der Abstand zwischen zwei
Windungen immer gleich ist. Wir stellen Punkte auf der Kurve in Polarkoordinaten dar.
Wir vergleichen zwei Punkte z1 = r1 eα und z2 = r2 ei(α+2π) , deren Argumente sich genau
um 2π unterscheiden. Die Bedingung bedeutet dann r2 − r1 = C = konstant. Fasst man
r (und damit z ) als Funktion von α auf, so ergibt sich für alle α ∈ R:
r(α + 2π) = r(α) + C
C
erfüllt diese Bedingung. Wir machen in der
Die Funktion r(α) := cα mit c = 2π
Vorlesung eine Skizze für c = 1. Dazu erstellen wir eine Wertetabelle:
α
x = α cos α
y = α sin α
0
0
0
√
π 2
8
π
4
≈√0, 555
π 2
8
π
2
0
π
2
π
π
0
3 π2
0
3 π2
2π
2π
0
...
...
...
Hier ist der Einsatz
eines Taschenrechners
sinnvoll!
Z.B. mit einer Tabellenkalkulation kann man diese Tabelle noch beliebig ergänzen.
Der gewünschte Effekt wird erst deutlich, wenn man viele Umläufe betrachtet. Das
können Sie leicht selbst mit Geogebra oder einem Computeralgebra-System realisieren.
Kreise mit Mittelpunkt 0 lassen sich besonderes einfach darstellen, nämlich durch
r(α) = R = konstant; der Radius (der Abstand vom Ursprung) muss ja konstant sein.
Geraden durch 0 erhält man, wenn man α = konstant setzt. Hier ist dann r der
Parameter. In kartesischen Koordinaten erhält man
(r cos α, r sin α) = r(cos α, sin α) mit r ∈ R.
Das sind streng genommen keine Polarkoordinaten mehr, weil r auch negativ sein kann.
Frage: Was kommt heraus, wenn man r ≥ 0 fordert?
16