Signale
Werbung

Universität Koblenz
Institut für integrierte Naturwissenschaften
Abteilung Physik
Signale
Seminar Digitale Signalverarbeitung
Dr. Merten Joost
von
Ralf Töppner
Matrikelnr.: 201210387
Koblenz, den 10. Juni 2005
Inhaltsverzeichnis
1
Vorwort
2
2
Signale und Systeme
2
3
Elementarsignale
3
4
Dirac-Impuls
4
5
6
7
Einteilung von Signalen
6
5.1
Diskrete und kontinuierliche Signale
. . . . . . . . . . . . . . . . . . . . . . .
6
5.2
Deterministische und stochastische Signale . . . . . . . . . . . . . . . . . . . .
7
5.3
Periodische, kausale, gerade und ungerade Signale . . . . . . . . . . . . . . . .
8
5.4
Reelle und komplexe Signale . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
5.5
Energie- und Leistungssignale . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6
Orthogonale Signale
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LTI-Systeme
9
10
12
6.1
Besondere Eigenschaften linearer Systeme
. . . . . . . . . . . . . . . . . . . .
12
6.2
Weitere Eigenschaften von Systemen . . . . . . . . . . . . . . . . . . . . . . .
14
Zusammenfassung
14
1
1
Vorwort
Im Studium der Informatik ist das Thema
Signale kaum mehr vertreten. Wir gehen in der In-
formatik von den Bits als atomare Einheiten aus. Alles ist aus Nullen und Einsen aufgebaut.
Wenn Daten übertragen werden, werden auch nur eben diese Einsen und Nullen übertragen.
Was sich physikalisch auf der Leitung bzw. in den Geräten abspielt wird weitestgehend auÿer
Acht gelassen, dabei könnte die Informatik ohne die digitale Signalverarbeitung gar nicht
existieren. Schlieÿlich müssen bei der Datenübertragung die Bits immer wieder in Signale
umgewandelt werden. Diese Signale können sich je nach verwendetem Medium stark voneinander unterscheiden. Am anderen Ende müssen diese Signale abgetastet und analysiert
werden. Für das Verständnis dieser Vorgänge ist es nötig eine allgemeine Vorstellung von
Signalen zu bekommen. Diese soll hier geschaen werden.
2
Signale und Systeme
Das Wort Signal ist vom lateinischen Begri signalis abgeleitet. Es bedeutet soviel wie
1
dazu bestimmt, ein Zeichen zu geben . Unter diesem Begri werden die in einem physikalischen System auftretenden Variablen, wie etwa Spannungen, Ströme, Temperaturen,
Kräfte usw., zusammengefasst. In den meisten Fällen ändern sich diese Signale mit der Zeit
und können daher, mathematisch betrachtet, als Funktionen der Zeit dargestellt werden.
Diese wird meist mit dem Buchstaben
t
chung
i, der
i von der Zeit t abhängt durch die Glei-
abgekürzt. Betrachten wir etwa den Strom
durch einen Leiter ieÿt, so kann die Tatsache, dass
i = f (t) oder durch i = i(t) ausgedrückt werden. Die zweite Schreibweise ist allerdings
inkonsequent, da mit dem gleichen Symbol sowohl die Funktion, als auch der Funktionswert
zum Zeitpunkt
t
bezeichnet wird. Allerdings stellt das kein Problem dar, da zu jeder Zeit
erkennbar ist, ob Funktion, oder Funktionswert gemeint ist. Bei der Festlegung der Formelzeichen wird dabei meist keine Rücksicht auf die physikalische Natur der Signale genommen.
Stattdessen verwendet man meist Bezeichnungen wie
x(t), y(t)
oder
z(t).
Die Verarbeitung bzw. Umwandlung (Transformation) eines Eingangssignals zu einem
Ausgangssignal wird formal durch die Formel
x(t) → y(t)
oder umgekehrt
y(t) = T {x(t)}
ausgedrückt.
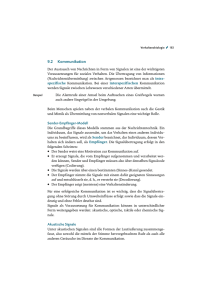
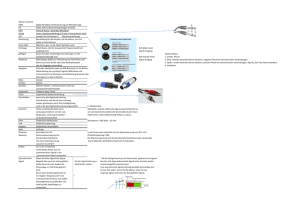
Abbildung 1: Zeitdarstellung
Abbildung 2: Darstellung als Spektrum
Signale lassen sich jedoch nicht nur im Zeitbereich, sondern auch im Frequenzbereich,
im sogenannten Spektrum, des Signals beschreiben. Die Kenntnis des Spektrums ist die
entscheidende Voraussetzung um Probleme in der Digitalen Signalverarbeitung zu lösen.
So kann z.B. eine ausreichende Abtastfrequenz nur mit Kenntnis des Spektrums ermittelt
werden. In Abbildung 1 ist eine zeitliche Darstellung eines Signals, in Abbildung 2 eine
Darstellung als Spektrum gezeigt. In der zeitlichen Darstellung ist zu sehen, wie sich die
Amplitude des Signals mit der Zeit ändert. In der Grak eines Spektrums lässt sich ablesen,
aus welchen Frequenzen ein Signal zusammengesetzt ist, und zu welchem Anteil diese am
Signal beteiligt sind.
Ein weiterer Begri, der oft im Zusammenhang mit Signalen verwendet wird, ist der
Begri System. Ein System ist ein technisches oder physikalisches Gebilde, das ein Signal,
das Eingangssignal
x(t),
in ein anderes Signal, das Ausgangssignal
y(t),
umformt. Statt
Eingangs- und Ausgangssignal spricht man auch von Erregung und Reaktion. Grasch
1 http://www.wikipedia.org
2
Abbildung 3: System
wird ein System durch einen Block dargestellt, in welchem die Signale gekennzeichnet werden. Die Signalrichtung wird dabei durch Pfeile ausgedrückt (siehe Abbildung 3). Kapitel 6
auf Seite 12 befasst sich noch einmal ausführlicher mit Systemen, vor allem mit sog.
Systemen.
3
LTI-
Elementarsignale
Unter Elementarsignalen versteht man eine Klasse von Zeitfunktionen, aus denen jeder beliebige Signalverlauf zusammensetzbar ist. Elementarsignale lassen sich eindeutig durch eine
Funktion
x(t)
beschreiben. Im Folgenden sollen einige typische Elementarsignale vorgestellt
werden.
•
Sprungfunktion (auch Einheitssprung oder Schrittfunktion)
σ(t) =
0:t<0
1:t≥0
Abbildung 4: Sprungfunktion
•
Rampenfunktion
r(t) = t · σ(t) =
0:t<0
t:t≥0
Abbildung 5: Rampenfunktion
•
Rechteckfunktion
3
rect
t
T0
=
0 : |t| >
1 : |t| ≤
T0
2
T0
2
Abbildung 6: Rechteckfunktion
•
sinc- oder Spalt-Funktion
sinc
t
T0
sin
=
πt
T0
πt
T0
Abbildung 7: sinc-Funktion
Die in der Signalverarbeitung wohl wichtigste Funktion ist die Cosinusfunktion oder
Cosinusschwingung:
x(t) = X̂ cos(2πf0 t)
X̂
gibt dabei die Amplitude oder den Scheitelwert und
man die Cosinusfunktion um
2π
(1)
f0
die Frequenz an. Verschiebt
nach rechts, so erhält man die Sinusfunktion. Multipli-
ziert man nun die Sinusfunktion mit der imaginären Einheit
j
und addiert das Ergebnis
zur Cosinusfunktion (1) so erhalten wir mithilfe der Eulerschen Formel (2) die komplexe
Sinusschwingung oder komplexe Exponentialfunktion (3).
x(t)
ejx = cos(x) + j sin(x)
(2)
x(t) = X̂ cos(2πf0 t) + j X̂ sin(2πf0 t) = X̂ej2πf0 t
(3)
X̂ und
2πf0 (= ω) in
kann man sich dabei als Drehzeiger mit der Länge
vorstellen, welcher mit der Winkelgeschwindigkeit
tiert. Die Frequenz
f0
dem Winkel
2πf0 t(= ωt)
der komplexen Ebene ro-
ist dabei gleich der Anzahl der Umdrehungen pro Zeiteinheit (siehe
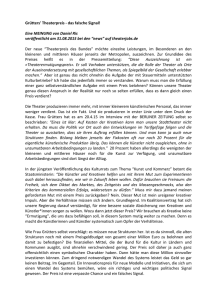
Abbildung 8: Die komplexe Exponentialfunktion als Drehzeiger
Abbildung 8).
4
Dirac-Impuls
Die
tol;
δ -Funktion, die zu Ehren des Mathematikers Paul A. M. Dirac (* 8. August 1902 in Bris† 20. Oktober 1984 in Tallahassee)2 auch Diracfunktion genannt wird, ist im mathema-
2 http://www.calsky.com/lexikon/de
4
tischen Sinne eigentlich keine Funktion, sondern eine Distribution, d.h. eine verallgemeinerte
Funktion. Das bedeutet, dass ein Funktionswert sich nicht durch Einsetzen eines Arguments
ergibt, sondern durch Ausführen einer Rechenvorschrift. Es gibt mehrere Möglichkeiten, die
Deltafunktion zu denieren, eine Variante lautet:
δ(t)
H ∞ = 0 für t 6= 0
δ(t)dt = 1
−∞
Für t = 0 ist der Funktionswert
(4)
unbestimmt!
Die Diracfunktion kann man sich als Rechteckfunktion mit der Fläche
Rechteckfunktion hat die Höhe 1 und die Breite
T0
und lässt anschlieÿend
T0 .
1
vorstellen. Die
1
T0
welcher
Multipliziert man die Funktion mit
gegen Null gehen, so entsteht ein Rechteckimpuls
δ(t)
unendlich hoch und unendlich dünn ist.
Die Denition der Diracfunktion (4) kann so interpretiert werden, dass die Diracfunktion nur dort existiert, wo ihr Argument
t
verschwindet. Die Deltafunktion an der Stelle
t0
kann also auch durch Gleichung (5) beschrieben werden.
δ(t − t0 ) = δ(t0 − t)
(5)
Betrachten wir nun das Integral
∞
Z
∞
Z
x(t) · δ(t − t0 )dt =
x(t) · δ(t0 − t)dt =?
−∞
−∞
Der Integrand ist ein Produkt, wobei einer der Faktoren (nämlich der Dirac-Impuls) auÿer
bei
t = t0
stets verschwindet. Der andere Faktor (nämlich
x(t))
hat darum nur bei
t = t0
einen Einuss auf das Produkt. Das Produkt und damit auch obiges Integral kann deshalb
anders geschrieben werden:
Z
∞
Z
∞
x(t) · δ(t0 − t)dt =
−∞
Z
∞
x(t) · δ(t0 − t)dt = x(t0 ) ·
−∞
−∞
|
δ(t0 − t)dt = x(t0 )
{z
}
1
Damit haben wir nun die wichtigste Eigenschaft des Dirac-Impulses (Gleichung (6)).
Z
∞
Z
∞
x(t) · δ(t − t0 )dt =
x(t) · δ(t0 − t)dt = x(t0 )
−∞
(6)
−∞
Man sagt, dass der Dirac-Impuls
δ(t − t0 )
das Signal
x(t)
an der Stelle
t = t0
abtastet. Man
spricht daher von der Abtasteigenschaft [1] des Dirac-Impulses. Diese Eigenschaft wird auch
3 erhalten wir:
Ausblendeigenschaft[2] genannt. Mithilfe der Fouriertransformation
Z
∞
δ(t) ◦−−•
−∞
δ(t) · e−jωt dt =
Z
∞
−∞
δ(t) · e|−jω0
{z } dt =
=1
Z
∞
δ(t)dt = 1
−∞
δ(t) ◦−−•1
Das bedeutet also, dass der Dirac-Impuls alle Frequenzen enthält.
Abbildung 9: Der Dirac-Impuls
3 Siehe
Vortrag Fouriertrnsformation des Seminars Digitale Signalverarbeitung
5
(7)
Dargestellt wird der Dirac-Impuls, wie Abbildung 9 zeigt, mit einem Pfeil. Die neben
dem Pfeil stehende Zahl gibt das Gewicht, d.h. die Fläche des Dirac-Impulses an. Mithilfe
des Dirac-Impulses sind wir nun in der Lage die sogenannte Abtastfunktion oder DiracImpulsreihe zu bilden. Zu diesem Zweck addiert man zum Dirac-Impuls seine um das Vielfache von
T
verschobenen Duplikate (siehe Gleichung (8)).
δT (t) =
∞
X
δ(t − nT )
(8)
−∞
Die so denierte Funktion ist in Abbildung 10 zu sehen. Neben Dirac-Impulsreihe und Ab-
Abbildung 10: Abtastfunktion
tastfunktion wird sie auch Dirac-Kamm genannt.
5
Einteilung von Signalen
Signale lassen sich aufgrund verschiedener Eigenschaften in verschiedene Klassen einteilen.
In diesem Kapitel sollen verschiedene solche, zum Teil unabhängige Einteilungen vorgenommen werden. Zunächst werden Signale in Bezug auf ihren Werte- und Denitionsbereich
untersucht.
5.1
Diskrete und kontinuierliche Signale
s(t), dessen Funktionswerte s nur für diskrete - meist äquidistante - Zeitpunkte
tv ; v = 0, ±1, ±2, ±3, ... deniert ist, nennt man zeitdiskret. Ist der Funktionswert s hingegen
für jeden Punkt t eines kontinuierlichen Zeitbereichs deniert, dann nennt man das Signal
Ein Signal
zeitkontinuierlich. Entsprechend nennt man das Signal wertdiskret bzw. wertkontinuierlich,
in Abhängigkeit davon, ob der Wertebereich diskret oder kontinuierlich ist.
Man kann also bezüglich des Werte- und Denitionsbereiches zwischen vier verschiedenen
Signaltypen unterscheiden:
a) zeitkontinuierliche wertkontinuierliche Signale
b) zeitdiskrete wertkontinuierliche Signale
c) zeitkontinuierliche wertdiskrete Signale
d) zeitdiskrete und wertdiskrete Signale
Signalart (a) wird auch kurz als analoge Signale bezeichnet und Signalart (d) als digitale
Signale, für den Fall, dass der Wertebereich von
s(t)
endlich ist. Diese Signale sind für die
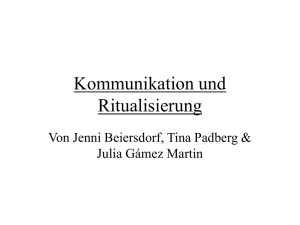
DSV (Digitale Signalverarbeitung) natürlich die bedeutendsten. In Abbildung 11[4] ist zu
jeder Signalart ein Beispielgraph abgebildet. Zu beachten ist, dass bei zeitdiskreten Funktionen der Funktionswert zwischen den diskreten Zeitpunkten
dv nicht Null ist, sondern
s(t) kann man sich auch
undeniert (Fälle (b) und (d)). Ein reelles zeitdiskretes Signal
als Folge reeller Zahlen vorstellen. Erzeugt wird solch ein Signal, indem man ein analoges Signal mit äquidistanten Abständen abtastet. Der entsprechend umgekehrte Vorgang
wird Interpolation genannt. Ein zeitkontinuierliches wertdiskretes Signal erhält man durch
6
Abbildung 11: Signale in Bezug auf Wert- und Denitionsbereich
Quantisierung eines analogen Signals. In diesem Fall nennt man den umgekehrten Vorgang
Glättung. Während eine Interpolation unter bestimmten Bedingungen das Originalsignal
fehlerfrei wiederherstellen kann, ist eine Glättung stets mit Fehlern behaftet. Dieser Fehler
wird auch Quantisierungsrauschen genannt. Die Entstehung eines digitalen Signals kann
man sich vorstellen, als Abtastung und Quantisierung eines analogen Signals, wobei die Reihenfolge dabei keine Rolle spielt.
In der nachfolgenden Tabelle sind nocheinmal die Beziehungen zwischen den verschiedenen Signalarten dargestellt:
(a)
(a)
(a)
(d)
(c)
(b)
5.2
→
→
→
→
→
→
(b)
:
(c)
:
Abtastung
Quantisierung
(d)
:
analog-digitale-Umsetzung (ADU)
(a)
:
digital-analog-Umsetzung (DAU)
(a)
:
Glättung
(a)
:
Interpolation
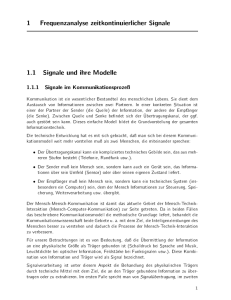
Deterministische und stochastische Signale
Deterministische Signale sind Funktionen, deren Funktionswerte durch einen mathematischen Ausdruck oder eine bekannte Regel bestimmt (determiniert) sind. Eines der bekanntesten deterministischen Signale ist die schon erwähnte Cosinusfunktion (Gleichung (1)).
Abbildung 12: Beispiel für ein deterministisches und ein stochastisches Signal
Ein stochastisches Signal wird durch den Zufall bestimmt und lässt sich daher nur mit
statistischen Mitteln beschreiben. D.h. die Amplitude eines stochastischen Signals lässt sich
zu keiner Zeit exakt vorherbestimmen. Das bedeutet aber nicht, dass sich nichts über derartige Signale sagen lässt. So sind oft z.B. Mittelwert, Varianz und Autokorrelationsfunktion
eines solchen Signals bestimmbar. Abbildung 12 zeigt für beide Signalarten jeweils ein Beispiel.
7
Allein stochastische Signale, wie z.B. Sprach- oder Bildsignale, sind Träger von Informationen. Vielfach sind stochastische Signale aber auch unerwünschte Signale, bzw. Störsignale.
Solche Signale sind der Grund für die Tatsache, dass jedes reale Signal streng genommen ein
stochastisches Signal ist, denn jedes Signal wird von Störsignalen überlagert. In der Theorie
werden diese Signale allerdings durch idealisierte, determinierte Signale ersetzt, da sich diese
mathematisch leichter handhaben lassen.
5.3
Periodische, kausale, gerade und ungerade Signale
Ein Signal
xP (t) heiÿt periodisch mit der Periode T0 , wenn es die Bedingungen aus Gleichung
(9) erfüllt.
xP (t) = xP (t + T0 )
Die sog. fundamentale Periode ist der kleinste positive Wert
(9)
T0
welcher Gleichung (9) erfüllt.
Im Allgemeinen nennt man dies kurz Periode. Bei periodischen Signalen genügt die Kenntnis
der Signal-Funktion während einer einzigen Periode, um das komplette Signal zu kennen.
Ein Beispiel hierfür ist die Cosinusfunktion aus Abbildung 5.2.
Eine weitere wichtige Klasse von Signalen sind die kausalen Signale. Ein Signal
xcs (t)
nennt man kausal, wenn es auf der negativen Zeitachse Null ist. Es wird deniert durch
Gleichung (10).
xcs (t) =
Dabei beschreibt
x(t)
x(t) : t ≥ 0
0:t<0
(10)
ein beliebiges Signal. Das bekannteste kausale Signal ist die Schritt-
funktion (oder Sprungfunktion aus Kapitel 3 auf Seite 3)
u(t),
die durch Gleichung (11)
deniert ist (siehe Abbildung 13).
u(t) =
1:t≥0
0:t<0
(11)
Abbildung 13: Beispiel für ein kausales Signal
Gerade und ungerade Signale sind in Gleichung (13) deniert.
xo (t) = −xo (−t)
xe (t) = xe (−t),
(12)
Ein gerades Signal ist spiegelsymmetrisch zur y-Achse, wie beispielsweise die Cosinusfunktion oder die Rechteckfunktion. Ein ungerades Signal hingegen ist punktsymmetrisch zum
Ursprung. Beispiele hierfür sind die Sinusfunktion und die Sägezahnfunktion in Abbildung
14. Jedes beliebige Signal lässt sich in ein gerades und ein ungerades Teilsignal zerlegen.
Dies geschieht einfach mit Gleichung (13).
x(t) =
x(t) x(−t) x(t) x(−t)
+
+
−
| 2 {z 2 } | 2 {z 2 }
xe (t)
5.4
(13)
xo (t)
Reelle und komplexe Signale
Die meisten Signale, sowohl in der Theorie als auch in der Praxis, sind reelle Signale und es
gilt Gleichung (14).
xr (t) = x(t),
mit
8
x(t)
reell
(14)
Abbildung 14: Ungerade Sägezahnfunktion
Ein reelles Signal ist eine Funktion, die der unabhängigen reellen Zeitvariablen
len Funktionswert
xr (t)
zuordnet. Mathematisch ausgedrückt:
t
einen reel-
xr : R → R.
Die Signalverarbeitung arbeitet jedoch auch mit komplexen Signalen, die durch Gleichung
(15) deniert werden.
xc (t) = x(t),
Mathematisch ausgedrückt:
xc : R → C.
x(t)
mit
komplex
(15)
Das klassische Beispiel hierfür ist die komplexe
Sinusschwingung (Gleichung ( 3 auf Seite 4)). Jedes komplexe Signal kann man sich aus
zwei reellen Signalen zusammengesetzt vorstellen, nämlich dem Realteil
ginärteil
xi (t)
xr (t) und dem Ima-
(siehe Gleichung (16)),
xc (t) = xr (t) + jxi (t)
(16)
wobei j die imaginäre Einheit ist.
5.5
Energie- und Leistungssignale
Eine weitere Möglichkeit der Einteilung von Signalen orientiert sich an den Begrien Energie
und Leistung.
R=
U
I
(17)
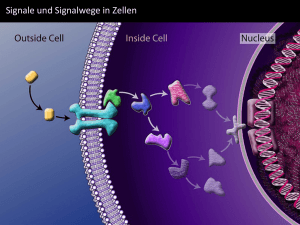
Abbildung 15: Einfache Schaltung mit Widerstand
Abbildung 15 zeigt eine einfache Schaltung mit Widerstand
R.
Den Zusammenhang
zwischen Spannung, Strom und Widerstand, der aus dem Ohm'schen Gesetz gefolgert ist,
beschreibt Gleichung (17). Die im Zeitintervall
t 1 ≤ t ≤ t2
gelieferte elektrische Energie
Eel
berechnet sich allgemein nach Gleichung (18).
Z
t2
u(t) · i(t)dt
Eel =
(18)
t1
Aus (17) und (18) folgt Gleichung (19).
Eel =
1
R
Z
t2
u2 (t)dt = R
Z
t1
t2
i2 (t)dt
(19)
t1
Die (mathematische) Energie ist also proportional zum Integral über die quadrierte Zeitfunktion. Die Energie eines zeitkontinuierlichen Signals
s(t)
nicht festgelegter physikalischer
Dimension ist also bestimmt durch Denition 20.
Z
∞
s2 (t)dt
E=
−∞
9
(20)
Ein Signal heiÿt nun Energiesignal, wenn es der Gleichung (21) genügt.
Z
∞
s2 (t)dt < ∞
0<E=
(21)
−∞
Ein Energiesignal besitzt also ein Signal mit endlicher und nicht verschwindender Energie
E.
Die Energie
E=0
wird oftmals auch zugelassen. Ein Beispiel für Energiesignale ist die
Rechteckfunktion aus Kapitel 2 auf Seite 2 (siehe Abbildung 16). Die Energie dieses Signals
Abbildung 16: Rechtecksignal mit Amplitude
berechnet sich nun so:
A
T0 /2
Z
A2 dt = A2 · T0
E=
−T0 /2
Die im Intervall
−θ ≤ t ≤ +θ
umgesetzte mittlere elektrische Leistung berechnet sich
allgemein:
1
Pel =
2θ
Z
θ
u(t) · i(t)dt
(22)
−θ
Daraus folgt nach Gleichung (17):
Pel =
1 1
R 2θ
θ
Z
u2 (t)dt = R
−θ
1
2θ
Z
θ
i2 (t)dt
(23)
−θ
Überträgt man Beziehung (24) nun auf ein unendlich langes Zeitintervall, so erhalten wir die
s(t)
mittlere Leistung eines zeitkontinuierlichen Signals
Z
1
θ→∞ 2θ
nicht festgelegter Dimension durch:
θ
s2 (t)dt
P = lim
(24)
−θ
Mithilfe Gleichung (24) können wir Leistungssignale jetzt wie folgt denieren:
1
θ→∞ 2θ
θ
Z
s2 (t)dt < ∞
0 < P = lim
Man kann also sagen, dass ein Leistungssignal
(25)
−θ
s(t)
in einem unendlich langen Zeitintervall
eine nichtverschwindende endliche mittlere Leistung
P
umsetzt. Das für die DSV bedeu-
tendste Leistungssignal ist die Cosinusschwingung.
Allgemein lässt sich sagen, dass ein Leistungssignal kein Energiesignal ist, da für ein
solches gilt:
gilt:
5.6
E → ∞.
Ebenso ist ein Energiesignal kein Leistungssignal, da in diesem Fall
P = 0.
Orthogonale Signale
Zur Denition orthogonaler Signale braucht es den Begri des Skalarprodukts. Dieses ist für
x(t) und y(t) wie folgt
Z ∞
< x, y >=
x(t)y ∗ (t)dt
zwei Energiesignale (siehe Kapitel 5.5)
−∞
10
deniert:
(26)
Wobei
y ∗ (t)
y(t)
das konjugiert komplexe Signal zu
Skalarprodukt zweier
T0 -periodischer
ist. Analog dazu deniert man das
Leistungssignale (siehe Kapitel 5.5)
Z
T0 /2
< xp , yp >T0 =
xp (t)
und
yp (t):
xp (t)yp∗ (t)dt
(27)
−T0 /2
Anhand des Skalarproduktes können wir nun die Orthogonalität zweier Energiesignale
und
y(t)
respektive zweier
T0 -periodischer
Leistungssignale
xp (t)
yp (t)
und
x(t)
denieren. Und
zwar herrscht Orthogonalität genau dann, wenn ihre Skalarprodukte Null sind:
< x, y >= 0,
respektive
< xp , yp >T0 = 0
(28)
Anhand dieser Denition lässt sich nun zeigen, dass komplexe Sinusschwingungen mit verschiedenen Frequenzen orthogonal zueinander stehen[1].
ϕk (t) = ej2πkf0 t und ϕl (t) = ej2πkf0 t mit
lf0 , wobei k und l ganze Zahlen sind. Für das Skalarprodukt zweier
Sinusschwingungen ϕk (t) und ϕl (t) gilt:
R T0 /2
Z T0 /2
−T0 /2 ej0 dt = T0 für k = l
j2π(k−l)f0 t
hϕk , ϕl iT0 =
e
dt =
j2π(k−l)f0 t T0 /2
e
für k 6= l
−T0 /2
j2π(k−l)f0 Gegeben sind zwei komplexe Sinusschwingungen
den Frequenzen
komplexer
kf0
und
−T0 /2
T0 /2
ej2π(k−l)f0 t =
j2π(k−l)f0 −T0 /2
=
cos(2π(k−l)f0
T0
2
)+j sin(2π(k−l)f0
=
cos(2π(k−l)f0
T0
2
)−cos(2π(k−l)f0
=
2 sin(π(k−l)f0 T0 )
2π(k−l)f0
=
2 sin((k−l)π)
2π(k−l)f0 mit
T0
2
)−cos(2π(k−l)f0
j2π(k−l)f0
T
0
2 )+j sin(2π(k−l)f0
j2π(k−l)f0
−T0
2
T0
2
)−j sin(2π(k−l)f0
)+j sin(2π(k−l)f0
−T0
2
T0
2
)
)
|k − l| ∈ N
=0
Diese Eigenschaft ist von entscheidender Bedeutung bei der Herleitung der Fourier-Reihe.
Mit dem Skalarprodukt lässt sich allerdings nicht nur die Orthogonalität zweier Funktionen denieren, sondern auch die Norm
kxk
eines Energiesignals, bzw die Norm
kxp k
eines
periodischen Signals:
kxk =
√
< x, x >,
respektive
kxp k =
p
< xp , xp >T0
(29)
In Anlehnung an die Vektorrechnung kann man unter der Norm auch die Länge eines Signals
verstehen. So können wir mithilfe Gleichung (20) für die Energie
E
eines Energiesignals
schreiben:
E = kxk2 =< x, x >
Für die Energie
E
eines
T0 -periodischen
(30)
Signals während der Periode
T0
können wir analog
schreiben:
E = kxp k2 =< xp , xp >T0
Woraus sich für die mittlere Leistung
P =
P
des
T0 -periodischen
(31)
Signals ergibt:
1
1
kxp k2 =
< xp , xp >T0
T0
T0
(32)
1
R multipliziert werden (je nachdem, ob das Signal einen Strom oder eine Spannung darstellt), wobei
Wie schon in Kapitel 5.5 auf Seite 9 gesehen, muss das Ergebnis noch mit
R
R
oder
den Widerstand darstellt, um physikalisch sinnvolle Ergebnisse zu erhalten.
11
6
LTI-Systeme
Eine besondere Klasse von Systemen bilden diejenigen, deren Verhalten von den Eingangssignalen unabhängig ist. Solche Signale heiÿen linear. Es gilt:
c1 x1 (t) + c2 x2 (t) linearesSystem c1 y1 (t) + c2 y2 (t)
−−−−−−−−−−−→
für beliebige Konstanten
•
c1 , c2 .
(33)
Darin enthalten sind zwei unabhängige Eigenschaften:
Die Homogenität
c · x(t) → c · y(t)
(34)
Ein System heiÿt also homogen, wenn eine Änderung der Amplitude des Eingangssignals, eine identische Änderung der Amplitude im Ausgangssignal bewirkt. Für diskrete Signale schreibt man auch:
c · x[n] → c · y[n].
Ein Widerstand ist ein einfaches Beispiel, sowohl für ein homogenes als auch für ein
nichthomogenes System. Nehmen wir an, das Eingangssignal des Systems sei die Spannung
v(t),
die am Widerstand abfällt, und die Ausgabe des Systems sei der Strom
i(t)
durch den Widerstand. Nach dem Ohm'schen Gesetz in der Elektrotechnik, welches
sagt, dass der Spannungsabfall
U
über einem metallischen Leiter bei konstanter Tem-
peratur proportional zu dem hindurchieÿenden elekrischen Strom mit der Stromstärke
I
ist (U
∼ I ),
gilt, dass eine Erhöhung oder Senkung der Spannung eine vom Faktor
äquivalente Erhöhung oder Senkung der Stromstärke bewirkt. Dieses System ist also
homogen.
Nehmen wir nun an, das Eingangssignal sei wieder die Spannung
das Ausgangsignal sei nicht mehr der Strom
am Widerstand abfallende Leistung
p(t).
i(t)
v(t) am Widerstand,
durch den Widerstand, sondern die
Da Leistung proportional zum Quadrat der
Spannung ist, steigt bei einer Verdopplung der Spannung die Leistung am Transistor
um den Faktor vier. Dieses System ist also nicht homogen und damit auch nicht linear.
•
Die Additivität
x1 (t) + x2 (t) → y1 (t) + y2 (t)
(35)
Ein System heiÿt also Additiv, wenn es von addierten Signalen durchquert wird, ohne dass diese interagieren. Handelt es sich wieder um diskrete Signale, so können wir
schreiben: Wenn gilt
y1 [n] → x1 [n]
und
y2 [n] → x2 [n]
dann gilt auch
y1 [n] + y2 [n] →
x1 [n] + x2 [n].
Als Beispiel kann man sich ein Telefon vorstellen: Wenn man mit einer Person telefoniert und im Hintergrund spricht noch eine andere Person, so kann man am anderen
Ende die beiden Personen klar voneinander unterscheiden. Die Daten interagieren also
nicht. Dieses Beispielsystem ist also additiv.
Ein System, welches sowohl die Homogenität, als auch die Additivität erfüllt heiÿt linear.
Angenommen, ein System
y(t) = V · x(t)
mit einer beliebigen Verstärkung
V
sei linear. Die
Linearität gilt auch noch dann, wenn sich die Verstärkung zeitlich ändert.
y(t) = V (t) · x(t)
mit z.B.
V (t) = sin(t)
So ein System nennt man zeitvariant. Ändert sich die Systemeigenschaft zeitlich nicht, so
heiÿt das System zeitinvariant:
x(t − τ ) linearesSystem y(t − τ )
−−−−−−−−−−−→
(36)
Linearität und Zeitinvarianz sind völlig unabhängige Eigenschaften. Erfüllt ein System diese
beiden Eigenschaften, nennt man es ein LTI-System (Linear TimeInvariant). Solche Systeme
sind besonders einfach zu handhaben.
6.1
Besondere Eigenschaften linearer Systeme
Eine besondere Eigenschaft linearer Systeme ist die Kommutativität. Dies betrit das Zusammenspiel zweier oder mehrerer Systeme. Nehmen wir an, zwei Systeme sind in Reihe
12
Abbildung 17: Reihenschaltung zweier Systeme
geschaltet (Siehe Abbildung 17). Das Ausgangssignal des einen Systems (A) ist dann das
Eingangssignal des anderen Systems (B). Ist jedes dieser Signale linear, so ist auch die Kombination dieser beiden Systeme linear. Die Kommutativität bedeutet, dass die Reihenfolge
der Systeme im Gesamtsystem keine Rolle für das Gesamtsystem spielt. Im Beispiel könnte
also auch System B vor Signal A stehen. Angenommen ein System besteht aus zwei Teilen,
einer für die Verstärkung eines Signales, der andere für Filterung. Sind beide Einzelsysteme
linear, so muss man sich nicht überlegen in welcher Reihenfolge die beiden Teile geschaltet
werden sollen. Da es in der Elektrik aber nichtlineare Eekte wie Interferenz oder interne
Störsignale gibt, lässt sich das nicht für die Realität verallgemeinern.
Abbildung 18: System mit mehreren Ein- und Ausgängen
Gehen wir nun einen Schritt weiter und betrachten Systeme mit mehreren Ein- und
Ausgängen (Siehe Abbildung 18). Solch ein System ist genau dann linear, wenn es eine
Komposition aus linearen Subsystemen ist. Die Addition von Signalen ändert dabei nichts
an der Linearität. Die Komplexität des Systems spielt keine Rolle. Wichtig ist nur, dass es
keine nichtlinearen Einüsse im System gibt.
Um die Linearität eines Systems mit mehreren Ein- bzw Ausgängen zu verstehen betrachten
wir nun ein solches System. Wir legen auf einen der Eingänge ein Signal, während die anderen Eingänge auf Masse gezogen werden. Nun erhalten wir auf den Ausgängen verschiedene
Muster von Signalen. Als nächstes wiederholen wir den Vorgang mit einem anderen Signal
und einem anderen Eingang. D.h. wir legen diesmal ein Signal an einen anderen Eingang an,
während alle anderen wieder auf Masse gezogen werden. Das hat nun andere Ausgangssignale zur Folge. Als letztes legen wir beide Signale gleichzeitig an den jeweiligen Eingängen
an. Die Signale, die nun an den Ausgängen erscheinen sind einfach jeweils die Summe der
beiden vorigen Ausgangssignale.
Eine weitere wichtige Frage bei linearen Systemen ist, ob die Multiplikation in linearen
Systemen erlaubt ist. Tatsächlich hängt dies davon ab, mit was ein Signal multipliziert wird.
Wird es mit einer Konstanten multipliziert, so ist das System linear. Dies kommt einer
Verstärkung oder einer Dämpfung gleich. Die Multiplikation mit nichtkonstanten Signalen
13
hingegen ist nichtlinear.
6.2
Weitere Eigenschaften von Systemen
Im Folgenden sollen noch drei allgemeine Typen von Systemen erklärt werden:
•
Kausale und deterministische Signale
Ein kausales System reagiert erst dann mit einem Ausgangssignal, wenn ein Eingangssignal anliegt. Die Stoÿantwort eines kausalen Systems verschwindet für
t < 0. Technisch
realisierbare Systeme sind stets kausal. Die Kausalität ist eine Eigenschaft von zeitabhängigen Signalen.
Ein deterministisches System reagiert bei gleicher Anfangsbedingung und gleicher Anregung stets mit demselben Ausgangssignal. Im Gegensatz dazu stehen die stochastischen Systeme. Wir haben festgestellt, dass stochastische Signale häuger vorkommen
als deterministische. Bei Systemen ist dies genau umgekehrt. Ein Beispiel für ein stochastisches Signal sind Zufallsgeneratoren.
•
Dynamische Systeme
Ein System heiÿt dynamisch, wenn sein Ausgangssignal auch von vergangenen Werten
des Eingangssignales abhängt. Das System muss somit mindestens ein Speicherelement
enthalten. Bei gedächtnislosen (statischen) Systemen hängt das Ausgangssignal nur
vom momentanen Wert des Eingangssignales ab.
•
Stabilität
Beschränkte Eingangssignale ergeben bei stabilen Systemen stets auch beschränkte
Ausgangssignale (BIBO-stabil = bounded input - bounded output):
| x(t) |≤ A < ∞ ⇒| y(t) |≤ B < ∞; A, B ≥ 0
7
(37)
Zusammenfassung
In diesem Dokument sollte ein kurzer Überblick über den Grundbegri Signale gegeben
werden. Es sollte ein Grundverständnis des Themas geschaen werden, mit dem der Einstieg
in die Digitale Signalverarbeitung erleichtert werden sollte. Zu diesem Zweck wurden erst
die Begrie Signal und System erklärt, dann wurden einige Elementarsignale vorgestellt und
dann mithilfe des Rechtecksignals der Dirac-Impuls (oder Diracstoÿ) eingeführt und mit ihm
die Abtastfunktion bzw. der Dirackamm. Im folgenden Kapitel wurden einige Einteilungen
von Signalen vorgenommen, z.B. in Energie- und Leistungssignale. Das letzte Kapitel handelt
von Systemen und da speziell von linearen Systemen, welche eine entscheidende Rolle in
der digitalen Signalverarbeitung spielen. Mit diesem Wissen sollte nun der Einstieg in die
DSV geschat sein und weiterführende Themen wie die Fourier-Transformation angegangen
werden können.
14
Literatur
[1] Daniel Ch. von Grüningen, Digitale Signalverarbeitung, 2. Auage, Fachbuchverlag
Leipzig
[2] Martin Meyer: Grundlagen der Informationstechnik - Signale Systeme und Filter, 1.
Auage, Vieweg-Verlag
[3] M.
versity
Huemer:
of
Vorlesung
Applied
Signal-
Sciences
und
of
hagenberg.at/sta/wbackfri/Teaching/BSV/
Upper
Biosignalverarbeitung,
Uni-
http://webster.fh-
Austria
[4] Prof. Dr.-Ing. R. Urbansky: Vorlesung Grundlagen der Informationsübertragung, Technische Universität Kaiserslautern
[5] Steven
cessing
W.
Smith:
Second
The
Edition,
http://www.dspguide.com
http://nt.eit.uni-kl.de/lehre/guet/
Scientist
and
California
Engineer's
Technical
15
Guide
Publishing,
to
Digital
San
Signal
Diego,
Pro-
California