Analysis I Prof. Schmeisser 2011-2012 N natürliche Zahlen
Werbung

Analysis I
Gauss: ∀n ∈ N :
Prof. Schmeisser 2011-2012
n
X
k=
k=1
n(n + 1)
2
0! = 1, 1! = 1, Binomialkoeffizient:
∀n ∈ N, k ∈ {1, 2, ..., n} :
n
k−1
+
n
k
n
k
=
n!
k!(n−k)!
=
n
n−k
,
n
0
=
n
n
N natürliche Zahlen (1,2,3,4,...)
Z ganze Zahlen (...,-2,-1,0,1,2,...)
Q rationale Zahlen
( ab ; a, b ∈ Z)
√
n
R reelle Zahlen ( x, π, e, ...)
C komplexe Zahlen (z = x + iy)
=1
n+1
k
=
Binomischer Satz: ∀a, b ∈ R, a, b 6= 0, n ∈ N : (a + b)n =
n X
n n−k k
a
b
k
k=0
n
∀n ∈ N, n ≥ 2, ∀x ∈ R, x > 0 : (1 + x)n >
⇒ (1 + x) > 1 + nx;
n
2
x2 =
n(n−1) 2
x
2
M ⊂ R, M 6= ∅ heißt beschränkt nach oben / unten g.d.w.: ∃c ∈ R : ∀x ∈ M : x ≤ c / x ≥ c.
c heißt obere / untere Schranke. Die kleinste obere Schranke heißt Supremum (sup(M )), die größte untere Schranke
Infimum (inf(M )).
Axiom von Archimedes: ∀a, b ∈ R, a, b > 0 : ∃n ∈ N : na > b
rationale Zahlen dicht in reellen Zahlen: ∀x ∈ R : ∀ε > 0 : ∃r ∈ Q : x − ε < r < x + ε
Intervalle: Offen: (a, b) := {x ∈ R : a < x < b}
Abgeschlossen: [a, b] := {x [
∈ R : a ≤ x ≤ b}
Intervallschachtelung: c ∈
In ⇔ ∀n ∈ N : c ∈ In
√
n
n∈N
√ √
Potenzen: ∀a, b ≥ 0 : ab = n a n b,
x
,x ≥ 0
Betrag: ∀x ∈ R : |x| =
−x , x < 0
1
a− n =
1
a
1
n
,
∀α =
1 m
m
∈ Q, a > 0 : aα = a n
n
Abstand: ∀x, y ∈ R : d(x, y) := |x − y|
ε-Umgebung von x0 : ∀ε > 0, ∀x0 ∈ R : Uε (x0 ) := (x0 − ε, x0 + ε) = {x0 ∈ R, |x − x0 | < ε}
M ⊂ R heißt offen :⇔ M = ∅ ∨ ∀x0 ∈ M : ∃Uε (x0 ) ⊂ M
M heißt abgeschlossen:⇔ R\M ist offen
0
x0 ∈ M heißt innerer Punkt:⇔ ∃Uε (x0 ) ⊂ M
M ist die Menge aller inneren Punkte.
x0 ∈ R heißt Häufungspunkt von M:⇔ ∀ε > 0 : ∃x ∈ (Uε (x0 ) ∩ M ) ∧ x 6= x0
f : X → Y heißt Funktion/Abbildung;
D(f ) = X Definitionsbereich und R(f ) = {f (x) : x ∈ X} Wertebereich.
- f heißt injektiv: ∀x1 , x2 ∈ X : (x1 6= x2 ⇒ f (x1 ) 6= f (x2 )) ∨ (f (x1 ) = f (x2 ) ⇒ x1 = x2 )
- f heißt surjektiv: f (X) = Y ⇔ ∀y ∈ Y : ∃x ∈ X : f (x) = y
- f heißt bijektiv: f ist injektiv und surjektiv
Hintereinanderausführung: f : X → Y g : Y → Z
(g ◦ f )(x) := g(f (x)) ,x ∈ X ⇒ (g ◦ f ) : X → Z
-D symmetrisch zu 0:⇔ x ∈ D ∧ −x ∈ D
f heißt gerade: ∀x ∈ D : f (−x) = f (x)
f heißt ungerade: ∀x ∈ D : f (x) = −f (−x)
-D = I Intervall
f streng monoton wachsend: ∀x1 , x2 ∈ I : x1 < x2 ⇒ f (x1 )<f (x2 )
f streng monoton fallend: ∀x1 , x2 ∈ I : x1 < x2 ⇒ f (x1 )>f (x2 )
abzählbare Mengen: X beliebige Menge:
X heißt endlich :⇔ ∃n ∈ N : ∃ bijektive Abbildung : ϕ : {1, 2, ..., n} → X oder X = ∅
X heißt abzählbar unendlich: ⇔ ∃ Bijektion ϕ : N → X
X heißt abzählbar: X endlich oder X abzählbar unendlich
X heißt überabzählbar unendlich:⇔ X nicht abzählbar
n
X
p : R → R mit p(x) =
ak xk heißt Polynom n-ten Grades mit den Koeffizienten ak
(an 6= 0).
k=0
1
Analysis I
Prof. Schmeisser 2011-2012
p(x0 ) = 0, x0 heißt Nullstelle;
ein Polynom p vom Grad n lässt sich auch wie folgt darstellen: p(x) = (x − x1 )m1 ...(x − xl )ml q(x), wobei xi eine
Nullstelle der Vielfachheit mi ist, q ein Polynom vom Grad n − (m1 + ... + ml ) ist und keine Nullstellen in R besitzt.
p hat höchstens n Nullstellen. Die rationalen Nullstellen eines Polynoms p(x) = an xn +an−1 xn−1 +...+a1 x+a0 mit
ak ∈ Z (k = 0, ..., n) findet man unter den Brüchen ab (a, b ∈ Z), in denen a ein Teiler von a0 und b ein Teiler von an
ist.
Zu n + 1 beliebigen Stützstellen (xi , yi ) , xi 6= xj für i 6= j, gibt es genau ein Polynom vom Grad ≤ n mit: P (xi ) = yi
(i = 0, ..., n).
Ansatz: pn (x) = a0 +a1 (x−x0 )+a2 (x−x0 )(x−x1 )+...+an (x−x0 )(x−x1 )...(x−xn−1 ) mit (x0 |y0 ), (x1 |y1 ), ..., (xn |yn )
für große |x| gilt: p(x) ≈ an xn
Faktorisierungssatz für reelle Polynome:
Jedes reelle Polynom p(x) = an xn + an−1 xn−1 + ... + a1 x + a0
(an 6= 0, n ≥ 1, aj ∈ R) lässt sich darstellen als:
p(x) = an (x − x1 )m1 ...(x − xr )mr [(x − α1 )2 + β12 ]l1 ...[(x − αs )2 + βs2 ]ls
wobei αj , βj ∈ R, m1 + ... + mr + 2(l1 + ... + ls ) = n, an ∈ R, xk ∈ R, mk , lj ∈ N für k = 1, ..., r, j = 1, ..., s.
Partialbruchzerlegung: R(x) =
R(x) =
P (x)
Q(x) ,
mj
r
X
X
j=1
wobei Grad(P (x)) < Grad(Q(x)):
Ajk
(x − xj )k
k=1
!
+
s
X
lj
X
ajk x + bjk
2 k
2
k=1 (x − αj ) + βj
, Ajk , ajk , bjk ∈ R
j=1
Ajmj
Aj1
Aj2
+
+ ... +
(x − xj ) (x − xj )2
(x − xj )mj
lj
ajlj x + bjlj
aj1 x + bj1
+ ... + quadratischen Faktor: (x − αj )2 + βj2 ⇒ lj
2
2
(x − αj ) + βj
(x − αj )2 + β 2
(x − xj )mj ⇒
mit dem Linearfaktor:
j
Drehung eines Koordinatensystems um den Winkel ψ:
x0
y0
cos(ψ) − sin(ψ)
sin(ψ)
cos(ψ)
=
x
y
y
y
y
arccos(x)
3
3
3
2
2
tan(x)
2
arcsin(x)
sin(x)
1
-4
-3
-2
-1
0
-1
1
2
3
x
0
-4
4
-3
-2
-1
0
-1
1
2
3
-4
4
-3
-2
cos(x)
-1
0
-1
-2
-2
-3
-3
-3
y
3
0
sin(x)
1
arccotan(x)
x
0
-4
-3
-2
-1
0
-1
-2
1
2
3
4
cot(x)
0
cos(x)
1
tan(x)
0
cotan(x)
-3
2
−
π
6
1
2
√
1
2 3
√
1
3 3
√
3
x
0
-2
2
arctan(x)
1
1
x
0
π
π
4
√
1
3
√
1
2 2
√
1
2 2
1
1
2
3
1
1
2
0
3
√
3
−
√
1
3
π
2
0
1
2
3
4
Analysis I
Prof. Schmeisser 2011-2012
Normaldarstellung: z = x + i y
Komplexe Zahlen:
z = (x, y) mit x, y ∈ R heißt komplexe Zahl (∈ C); z = (x, −y) konjugiert komplexe Zahl.
Addition: z + w = (x + u, y + v) mit z = (x, y), w = (u, v), w, z ∈ C.
Multiplikation: z · w = (xu − yv, xv + yu).
(1, 0) neutrales Element der Multiplikation; (0, 0) neutrales Element der Addition;
(−z) inverses Element der Addition zu z;
1
x2 +y 2 (x, −y) inverses Element der Multiplikation zu (x, y).
z + z = 2 Re(z),
zp− z = 2i Im(z).
√
Betrag von z ∈ C: |z| = x2 + y 2 = zz,
Abstand von z, w ∈ C: d(z, w) = |z − w|.
Trigonometrische Darstellung: z = |z|(cos(ϕ) + i sin(ϕ)); ϕ heißt Argument;
• für z, w ∈ C:
z = w ⇔ |z| = |w| ∧ ϕ = ψ + 2kπ, k ∈ Z
• z · w = |z| · |w|(cos(ϕ + ψ) + i sin(ϕ + ψ))
• n ∈ N ⇒ z n = |z|n (cos(nϕ) + i sin(nϕ))
p
√
ϕ
2π
2π
• wk = n z = n |z| cos( ϕ
n + k n ) + i sin( n + k n ) ,
(k = 0, 1, ..., n − 1,
n verschiedene Zahlen)
y
Einheitswurzeln:
i
1. Es gilt wn = 1 g.d.w.
2π
w = cos(k 2π
n ) + i sin(k n ),
k = 0, 1, ..., n − 1
2. Die n-ten Einheitswurzeln bilden ein regelmäßiges n-Eck auf dem Einheitskreis.
ϕ
x
komplexes Polynom: p(z) = z n + cn−1 z n−1 + ... + c1 z + c0 ,
(n ∈ N, z, cj ∈ C)
-1
1
Fundamentalsatz der Algebra:
für n ∈ N
Jedes komplexe Polynom n-ten Grades hat in C (mindestens) eine Nullstelle.
-i
Ist z0 Nullstelle des Polynoms, so ist es auch z0 .
p sei ein Polynom mit reellen Koeffizienten, x1 , ..., xr reellen Nullstellen mit Vielfachheiten m1 , ..., mr und z1 , ..., zs , z1 , ..., zs
komplexen Nullstellen mit Vielfachheiten l1 , ..., ls (zj = αj + i βj , zj = αj − i βj , βj 6= 0 mit j = 1, ..., s):
p(x) = (x − x1 )m1 ...(x − xr )mr [(x − α1 )2 + β12 ]l1 ...[(x − αs )2 + βs2 ]ls
(ak )k∈N heißt konvergent :⇔ ∃a ∈ R : ∀ε > 0 : k0 (ε) ∈ N : ∀k ≥ k0 : |ak − a| < ε .
a heißt dann Grenzwert von ak ; Schreibweise: ak → a /
lim (ak ) = a
k→∞
Andernfalls heißt ak divergent.
lim (ak ) = ∞ ⇔ ∀c > 0 : ∃k0 (ε) ∈ N : ak > c : ∀k > k0
k→∞
lim (ak ) = −∞ ⇔ ∀c > 0 : ∃k0 (ε) ∈ N : ak < −c : ∀k > k0
k→∞
lim (ak ) = a ⇔ lim (ak − a) = 0 ⇔ lim |ak − a| = 0
Jeder Grenzwert ist eindeutig bestimmt.
k→∞
k→∞
Existieren Grenzwerte a = lim(ak ), b = lim(bk ) und für k ≥ k0 gilt ak ≤ bk , so gilt:
a≤b
Sandwich-Lemma:
Es seien ak ≤ ck ≤ bk für k ≥ k0 und es sei lim(ak ) = lim(bk ) = c; dann ist:
lim(ck ) = c.
lim(ak ) = a ∈ R ⇒ lim |ak | = |a|
für 0 ≤ ak gilt: lim(ak ) = a ∈ R ⇒ lim
√
ak =
√
a
k→∞
|q| < 1 ⇒ lim q k = 0
k→∞√
a > 0 ⇒ lim k a = 1
k→∞
√
k
lim
k=1
k→∞
kn
a > 1, n ∈ N ⇒ lim k = 0
k→∞ a
ak
a > 1 ⇒ lim
=0
k→∞ √
k!
k
k > 1 ⇒ lim
k! = ∞
k→∞
ak < bk 6⇒ lim ak < lim bk
3
Analysis I
Prof. Schmeisser 2011-2012
• ∃c > 0 : |ak |∀k∈N < c, so heißt ak beschränkt.
• ist (bk )k∈N beschränkt und lim ak = 0, ⇒ lim(ak · bk ) = 0.
• ∃ lim(bk ) = b ∧ ∃ lim(ak ± bk ) ⇒ lim(ak ± bk ) = lim(ak ) ± lim(bk ) = a ± b.
• ∃ lim(bk ) = b ∧ ∃ lim(ak · bk ) ⇒ lim(ak · bk ) = lim(ak ) · lim(bk ) = a · b.
a
k)
• ∃ lim(bk ) = b 6= 0 ∧ ∃ lim abkk ⇒ lim abkk = lim(a
lim(bk ) = b
Satz von der monotonen Konvergenz:
(ak )k ist monoton wachsend (fallend) und beschränkt, dann: lim(ak ) = sup{ak : k ∈ N} (= inf{ak : k ∈ N}).
Jede beschränkte Folge reeller Zahlen besitzt eine konvergente Teilfolge (Bolzano-Weierstraß).
a ∈ R heißt Häufungswert der Folge (ak )k ⇔ eine Teilfolge (akl )l existiert mit: lim(akl ) = a. Ist H(ak ) die Menge
aller Häufungspunkte, so ist:
(limes superior, oberer Limes),
lim sup(ak ) = lim(ak ) = sup (H(ak ))
lim inf(ak ) = lim(ak ) = inf (H(ak ))
(limes inferior, unterer Limes).
Cauchy-Folge: (ak )k∈N heißt Cauchy-Folge ⇔ ∀ε > 0 : ∃k(ε) : ∀k, l > k(ε) : |ak − al | < ε
Ist (ak )k konvergent ⇒ (ak )k ist eine Cauchy-Folge (Fundamentalfolge).
Ist (ak )k eine Cauchy-Folge ⇒ (ak )k ist beschränkt.
Cauchy’sches Konvergenzkriterium:
(ak )k sei eine Folge in R, dann gilt: (ak )k konvergent ⇔ (ak )k ist eine Cauchy-Folge
2
Konvergenz komplexer Folgen:
n
(z.B.: geometrische Reihe: lim (1 + z + z + ... + z ) =
n→∞
1
falls |z| < 1)
1−z
• (ck )k∈N mit ck ∈ C : ∀k
• (ck )k ist konvergent ⇔ ∃c ∈ C : ∀ε > 0 : ∃k(ε) : |ck − c| < ε für k > k(ε)
(c = lim (ck ))
k→∞
• (Rückführung auf reelle Nullfolgen:) c = lim (ck ) ⇔ lim |ck − c| = 0
k→∞
k→∞
• ck = ak + i bk mit ak , bk ∈ R, ∀k ∈ N:
(ck )k ist konvergent ⇔ (ak )k , (bk )k sind konvergent
und lim ck = lim ak + i lim bk
k→∞
• Daher gelten die gleichen Rechenregeln wie bei reellen Folgen!
k→∞
k→∞
(z.B. auch das Cauchy’sche Konvergenzkriterium.)
Konvergenz von Reihen:
∞
n
X
X
Sei (ak )k∈N =
ak ∈ C, dann heißt sn =
ak n-te Partialsumme der Reihe ak .
k=0
k=0
ak heißt konvergent: ⇔ ∃ lim sn = s ∈ C
n→∞
Die Reihe
∞
X
(
ak heißt absolut konvergent ⇔
k=0
(Schreibweisen: ∀ak ∈ R : ak ≥ 0 : k ∈ N0 :
∞
X
ak = s); sonst heißt ak divergent.
k=0
∞
X
∞
X
|ak | ist konvergent.
k=0
ak < ∞ ⇔
k=0
e = lim (1 +
n→∞
|
∞
X
ak ist konvergent;
k=0
n
X
1 n
1
1
) = lim
= lim (1 + )n+1
n→∞
n
k! n→∞
|
{z n
}
k=0
{z
}
monoton fallend
monoton steigend
∞
X
ak = ∞ ⇔
k=0
∞
X
ak ist divergent.)
k=0
ist irrational.
(Stirling-Formel: ∀n > 0 :
4
n n √
e
2Πn < n! <
n n √
1
2Πn e 12n )
e
Analysis I
Prof. Schmeisser 2011-2012
∞
X
n
X
1
n
für |z| < 1. (Für |z| ≥ 1 ist sie divergent.) X
1
1−z
<2
k=0
k=0
2
k
∞
X
k=1
1
harmonische Reihe:
= ∞ (streng monoton wachsend).
k
k=1
"
#
∞
∞
X
X
−k
−k
unendliche Dezimalbrüche: s = 0, x1 x2 x3 ... =
(xk ·10 ) (monoton wachsend, 0 ≤ s ≤ 1). ⇒ 0, 9 = 9 ·
10 = 1
geometrische Reihe: z ∈ C:
z k = lim
n→∞
zk =
k=1
k=1
∀ak ∈ C gilt:
• notwendige Bedingung für Konvergenz:
∞
X
ak konvergent ⇒ lim ak = 0
∞
X
• Aus absoluter Konvergenz
!
|ak | < ∞
folgt Konvergenz
k=0
∞
X
ak =
k=0
•
∞
X
ak ,
k=0
∞
X
∞
X
αk + i
k=0
bk konvergent ⇒
k=0
∞
X
∞
X
• ak ∈ R, ak ≥ 0, k ∈ N0 ⇒
!
ak < ∞
∞
∞
X
X
und es gilt: ak ≤
|ak |
k=0
ak (absolut) konvergent ⇔
k=0
∞
X
∞
X
αk ∧
k=0
∞
X
k=0
βk (absolut) konvergent
k=0
βk .
k=0
(ak + bk ) =
k=0
∞
X
∞
X
k=0
• Sei ak = αk + i βk mit αk , βk ∈ R; dann ist
sind. Außerdem gilt
(Nullfolge)
k→∞
k=0
∞
X
k=0
ak +
∞
X
bk konvergent.
k=0
ak konvergent ⇔ die Folge der Partialsummen
sn =
k=0
n
X
k=0
!
ak
ist beschränkt.
n∈N0
Majorantenkriterium: mit 0 ≤ ak ≤ bk für k ≥ k0 gilt:
∞
∞
∞
∞
X
X
X
X
•
bk konvergent ⇒
ak konvergent ∧
ak ≤
bk
k=0
•
∞
X
k=0
ak = ∞
k=0
⇒
∞
X
k=k0
k=k0
bk = ∞
k=0
Wurzelkriterium: mit ak ≥ 0 für k ≥ k0
∞
X
√
ak ist konvergent.
• ∀k ≥ k0 gilt: k ak < 1 ⇒
√
k
• lim sup( ak ) > 1 ⇒
∞
X
k=0
ak ist divergent.
k=0
√
Ist lim sup( k ak ) = 1 so folgt daraus keine Aussage über Konvergenz.
Quotientenkriterium: ak > 0 für k ≥ k0
∞
X
• ∀k ≥ k1 gilt: aak+1
<
1
⇒
ak konvergent
k
k=0
•
akl+1
akl
≥ 1 für l ≥ l0 ⇒
∞
X
k=0
ak divergent.
- ak > 0, k ≥ k0 : lim sup aak+1
<1⇒
k
- lim sup aak+1
>1⇒
k
∞
X
ak konvergent
k=0
ak divergent
k=0
∞
X
|
- lim sup |a|ak+1
<1⇒
k|
k=0
5
∞
X
|ak | absolut konvergent (ak ∈ C, ak 6= 0)
Analysis I
Prof. Schmeisser 2011-2012
Leibnizkriterium für alternierende Reihen:
Es sei (ak )k∈N Folge in R, ak ≥ 0, monoton fallend und lim ak = 0. ⇒ ∃
k→∞
es gilt |sn − s| ≤ an+1
∞
X
(−1)k+1 ak = s
∈ R (Konvergenz) und
k=1
(n ∈ N).
alternierende harmonische Reihe:
∞ X
1
ist konvergent (= ln(2)), aber nicht absolut konvergent.
(−1)k+1
k
k=1
∞ X
1
(−1)k+1 α konvergent für α > 0, absolut konvergent für α > 1.
k
k=1
∞
X
1
k+1
konvergent, nicht absolut konvergent.
(−1)
2k + 1
k=1
Sei (ak )k∈N0 Folge in C, ϕ : N0 → N0 eine Bijektion (Umordnung, Permutation); dann heißt bk = aϕ(k)
Umordnung von (ak )k∈N0 .
großer Umordnungssatz:
∞
X
(∀k ∈ N0 )
ak konvergent, aber nicht absolut konvergent (für ak ∈ R) und s ∈ R ∨ s = +∞ ∨ s = −∞
k=0
⇒ ∃ Umordnung (bk )k von (ak )k mit
∞
X
bk = s
(s beliebig !)
k=0
∞
X
ak absolut konvergent, ak ∈ C:
∞
∞
∞
X
X
X
(bk )k sei eine Umordnung von (ak )k ⇒
bk ist absolut konvergent und es gilt:
ak =
bk .
kleiner Umordnungssatz: Sei
k=0
k=0
Produktreihen:
∞
∞
X
X
(pl )l =
pl =
aj ·
Es gilt:
l=0
∞
X
pl ∧
l=0
Es seien
∞
X
j=0
∞
X
∞
X
!
bk
X
=
k=0
(aj · bk ) heißt Produktreihe von
aj und
j=0
l=0
aj = a und
∞
X
∞
X
j=0
j,k∈J×K
∞
X
ql Produktreihen von
j=0
und
∞
X
k=0
∞
X
k=0
aj und
∞
X
bk .
k=0
bk =⇒ (ql )l ist eine Umordnung von (pl )l .
k=0
bk = b absolut konvergent (aj , bk ∈ C). Dann konvergiert jede Produktreihe
k=0
∞
X
pl absolut
l=0
pl = a · b.
l=0
Cauchy-Produkt: vl :=
X
j+k=l
(aj bk ) =
l
X
(al−k bk ),
l ∈ N0 .
k=0
∞
X
vl heißt Cauchy-Produkt von
{z
aj und
j=0
l=0
|
∞
X
∞
X
bk .
k=0
}
(Summation bezüglich der Diagonalen)
Seien
∞
X
aj = a und
j=0
∞
X
k=0
bk = b absolut konvergent, so ist auch das Cauchy-Produkt absolut konvergent
" l
#
∞
X
X
und es gilt
al−k bk = a · b.
Exponentialfunktion:
∞
X
zk
z ∈ C: exp(z) =
k!
l=0
exp : C −→ C heißt Exponentialfunktion.
k=0
∀z, w ∈ C, m, n ∈ N, n 6= 0 :
k=0
1
exp(−z) = exp(z)
,
p
m
1 m
n
exp( n ) = [exp( n )] = exp(m).
exp(z + w) = exp(z) · exp(w),
exp(z) 6= 0,
z
∀z ∈ C: e = exp(z) = lim (1 + )n und ez =
6 0.
n→∞
n
z
6
x > 0: ex > 1 + x
1
x < 0: ex < − x−1
iy
∀y ∈ R: |e | = 1
Analysis I
Prof. Schmeisser 2011-2012
Grenzwerte von Funktionen:
D ⊂ C, z0 ∈ C Häufungspunkt von D, f : D → C Funktion, dann:
lim (f (z)) = w0 ⇔ ∀ Folgen (zk )k in D mit lim (zk ) = z0 gilt: lim (f (zk )) = w0
z→z0
k→∞
k→∞
oder („ε − δ “- Definition des Grenzwertes):
⇔ ∀ε > 0 : ∃δ = δ(ε, z0 ) : ∀z ∈ kδ (z0 ) ∩ D : z 6= z0 gilt: |f (z) − w0 | < ε
f : (a, b) → R, x0 ∈ [a, b)
(⇒ rechtsseitig)
/ x0 ∈ (a, b](⇒ linksseitig):
rechtsseitiger Grenzwert: lim+ (f (x)) = y0
⇔ ∀ε > 0 : ∃δ > 0 : ∀x ∈ (x0 , x0 + δ) ∩ (a, b) : |f (x) − y0 | < ε
x→x0
linksseitiger Grenzwert: lim− (f (x)) = y0
⇔ ∀ε > 0 : ∃δ > 0 : ∀x ∈ (x0 − δ, x0 ) ∩ (a, b) : |f (x) − y0 | < ε
x→x0
uneigentliche Grenzwerte:
f : (a, b)\{x0 } → R, x0 ∈ (a, b): lim (f (x)) = +∞ ⇔ ∀c > 0 : ∃δ > 0 : ∀x ∈ Uδ (x0 ) ∩ (a, b) : x 6= x0 : f (x) > c
x→x0
f : (a, ∞) → R:
lim (f (x)) = y0 ∈ R ⇔ ∀ε > 0 : ∃R > a : ∀x > R : |f (x) − y0 | < ε
x→∞
lim (f (x)) = ∞
x→∞
⇔ ∀c > 0 : ∃R > a : ∀x > R :
f (x)
>c
Stetigkeit: D ⊂ C, z0 ∈ D, f : D → C
f heißt stetig in z0 ⇔ ∀ε > 0 : ∃δ = δ(ε, z0 ) : ∀z ∈ kδ (z0 ) ∩D : f (z) ∈ kε (f (z0 )) .
| {z }
| {z }
|z−z0 |<δ
|f (z)−f (z0 )|<ε
f stetig auf U ⇔ f ist in jedem Punkt z0 ∈ U stetig.
f stetig in z0 ⇔ z0 ist isolierter Punkt (kein Häufungspunkt) von D oder lim (f (z)) = f (z0 ).
z→z0
n
- f (x) = x
√ stetig auf R (n ∈ N)
f stetig in z0 , (zk )k mit lim zk = z0 =⇒ lim (f (zk )) = f lim (zk ) .
- f (x) = x stetig auf [0, ∞)
k→∞
k→∞
k→∞
- f (z) = ez stetig auf C
f = Re(f (z)) + i Im(f (z)) und f stetig in z0 ⇔ Re(f ) und Im(f ) stetig in z0 .
- f (x) = |x| stetig auf R
Sind f, g : D → C stetig in z0 ∈ D, so gilt: f + g, f · g,
f
g
(g(z) 6= 0) und |f | stetig in z0 .
Seien f : D → C stetig in z0 ∈ D ⊂ C und g : f (D) → C stetig in w0 = f (z0 ) =⇒ g ◦ f stetig in z0 ∈ D.
Zwischenwertsatz:
f : [a, b] → R stetig auf [a, b] und f (a) · f (b) < 0 =⇒ ∃x0 ∈ (a, b) mit f (x0 ) = 0
I Intervall, f : I → R stetig auf I und −∞ ≤ inf (f ) < w < sup(f ) ≤ +∞, dann:
I
I
1. ∃ξ ∈ I mit f (ξ) = w
2. f (I) = {f (x), x ∈ I} ist ein Intervall
Folgerung: Jedes Polynom mit einem größten ungeraden Exponenten hat mindestens eine reelle Nullstelle und P (R) =
R.
Satz von Maximum und Minimum:
f : [a, b] → R stetig auf [a, b] = I, dann gilt:
1. f (I) ist beschränkt und abgeschlossen
2. ∃u, v ∈ I mit f (u) = inf I (f ) ∧ f (v) = supI (f )
Stetigkeit der Umkehrfunktion:
I ⊂ R Intervall, f : I → R stetig und streng monoton wachsend (bzw. fallend) ⇒ f (I) ist ein Intervall.
f −1 : f (I) → I ist stetig auf f (I) und streng monoton wachsend (bzw. fallend).
Der natürliche Logarithmus ln : (0, ∞) → R ist Umkehrfunktion von exp : R → (0, ∞). Er ist streng monoton
wachsend, bijektiv und stetig. Außerdem gilt: ∀x, y ∈ (0, ∞): ln(x · y) = ln(x) + ln(y) und ln( xy ) = ln(x) − ln(y) und
∀α ∈ Q, ∀x ∈ (0, ∞) : ln(xα ) = α · ln(x).
7
Analysis I
Prof. Schmeisser 2011-2012
allgemeine Potenzfunktion: α ∈ R, x > 0 : xα = eα ln(x) ;
allgemeine Exponentialfunktion: a > 0, x ∈ R : ax = ex ln(a) .
Die Umkehrfunktion der Exponentialfunktion ax : R → (0, ∞) ist die Logarithmus-Funktion: loga (x) : (0, ∞) → R
ln(x)
(a > 0, a 6= 1, x > 0). Dabei gilt: loga (x) = ln(a) und log 1 (x) = − loga (x).
a
f (x) − f (x0 )
f : (a, b) → C heißt differenzierbar in x0 ∈ (a, b) ⇔ ∃f (x0 ) = lim
= α ∈ C (die erste Ableitung
x→x0
x − x0
von f in x0 ). f heißt differenzierbar auf (a,
b) ⇔ f injedem Punkt x0 ∈ (a, b) differenzierbar.
0
0
rechtsseitiger Grenzwert: f+
(x0 ) = lim
x→x0 +
f (x)−f (x0 )
x−x0
(x0 ∈ [a, b)).
0
linksseitiger Grenzwert: f−
(x0 ) = lim −
f (x)−f (x0 )
x−x0
Γ := Graph (f) = {(x, f (x)), x ∈ (a, b)};
g(x) = f (x0 ) + f 0 (x0 ) · (x − x0 ), x ∈ R heißt Tangente an Γ in (x0 , f (x0 )).
x→x0
(x0 ∈ (a, b]).
f : (a, b) → C mit f (x) = Re(f (x)) + i Im(f (x)) ist differenzierbar in x0 ∈ (a, b)
⇔ Re(f (x)) und Im(f (x)) sind differenzierbar in x0 und es gilt: f 0 (x0 ) = (Re(f ))0 (x0 ) + i (Im(f ))0 (x0 ).
Folgende Aussagen sind dabei äquivalent:
• f ist differenzierbar in x0 und f 0 (x0 ) = α ∈ C
ez −ez0
=
z→z0 z−z0
ix 0
ix
lim
2
• f (x) = f (x0 ) + α(x − x0 ) + ε(x)(x − x0 ) und lim (ε(x)) = 0
x→x0
•
f (x)−f (x0 )−α(x−x0 )
x−x0
x→x
0
−−−−−
→0
Ist f differenzierbar in x0 ∈ (a, b) ⇒ f stetig in x0 (Umkehrung gilt nicht!).
ez0
(e ) = ie
(xn )0 = nxn−1
√
1
( x)0 = 12 x− 2
( x1 )0 = − x12
trigonometrische Grenzwerte
(sin(x))0 = cos(x)
λ, µ ∈ C ⇒ ∃(λf + µg)0 (x0 ) = λf 0 (x0 ) + µg 0 (x0 )
(cos(x))0 = − sin(x)
1
0
π
∀x ∈ R, x 6= 2 + kπ, k ∈ Z : (tan(x)) = cos2 (x)
Produktregel: ∃(f · g)0 (x0 ) = f 0 (x0 )g(x0 ) + f (x0 )g 0 (x0 )
1
0
∀x ∈ R, x 6= kπ, k ∈ Z : (cot(x)) = −
sin2 (x)
0
0
0
0 )−f (x0 )g (x9 )
Quotientenregel: g(x0 ) 6= 0 ⇒ ∃ fg (x0 ) = f (x0 )g(x[g(x
2
0 )]
lim sin(x)
=1
x→0 x
Kettenregel: f : (a, b) → (c, d) differenzierbar in x0 ∈ (a, b), g : (c, d) → C differen- lim 1−cos(x) = 0
x
x→0
zierbar in y0 = f (x0 ) ⇒ ∃(g ◦ f )0 (x0 ) = g 0 (f (x0 )) · f 0 (x0 )
Differentiationsregeln: (f, g : (a, b) → C differenzierbar in x0 ∈ (a, b))
1.
2.
3.
4.
Differenzierbarkeit von f −1 . f : (a, b) → R differenzierbar auf (a, b) und streng monoton, dann gilt:
1. f 0 (x) ≥ 0 auf (a, b), falls f streng monoton wachsend
2. f 0 (x) ≤ 0 auf (a, b), falls f streng monoton fallend
0
1
1
3. y0 = f (x0 ) ∧ f 0 (x0 ) 6= 0 =⇒ ∃ f −1 (y0 ) = 0
= 0 −1
f (x0 )
f (f (y0 ))
ln0 (x) = x1 , x > 0
1
loga 0 (x) = x ln(a)
α 0
α−1
(x ) = αx
, α ∈ R, x > 0
1
arcsin0 (x) = √1−x
2
1
arccos0 (x) = − √1−x
2
1
arctan0 (x) = 1+x
2
1
arccot0 (x) = − 1+x
2
f : (a, b) → R hat lokales Maximum (Minimum) in x0 ∈ (a, b)
⇐⇒ ∃δ > 0 : ∀x ∈ (x0 − δ, x0 + δ) ⊂ (a, b) : f (x) ≤ f (x0 ) (f (x) ≥ f (x0 )).
f : (a, b) → R hat isoliertes lokales Maximum (Minimum) in x0 ∈ (a, b)
⇐⇒ ∃δ > 0 : ∀x ∈ (x0 − δ, x0 + δ) ⊂ (a, b) : f (x) < f (x0 ) (f (x) > f (x0 )).
f : (a, b) → R differenzierbar in x0 ∈ (a, b) und f habe ein lokales Maximum (Minimum) in x0 ⇒ f 0 (x0 ) = 0.
(notwendige Bedingung, nach P. Fermat 1607 - 1665)
f : [a, b] → R stetig auf [a, b], differenzierbar auf (a, b) und f (a) = f (b) =⇒ ∃x0 ∈ (a, b) mit f 0 (x0 ) = 0.
(Michel Rollé 1652 - 1719)
8
Analysis I
Prof. Schmeisser 2011-2012
Mittelwertsätze der Differentialrechnung:
1. f : [a, b] → R stetig auf [a, b], differenzierbar auf (a, b) ⇒ ∃ξ ∈ (a, b) mit
f (b)−f (a)
b−a
= f 0 (ξ).
(J.L.Lagrange 1736 - 1813)
0
2. f, g : [a, b] → R stetig auf [a, b], differenzierbar auf (a, b) und g (x) 6= 0 auf (a, b)
(b)−f (a)
=
⇒ ∃ξ ∈ (a, b) mit fg(b)−g(a)
f 0 (ξ)
g 0 (ξ) .
(A.L.Cauchy 1789 - 1857)
Daher gilt:
0
f : (a, b) → C differenzierbar, ∀x ∈ (a, b) : f (x) = 0 ⇒ ∃c = α + iβ, α, β ∈ R mit f (x) = c auf (a, b).
f 0 (x) = g 0 (x) : ∀x ∈ (a, b) ⇒ ∃c ∈ R : f (x) = g(x) + c : ∀x ∈ (a, b).
Eulersche Formel: ∀x ∈ R : eix = cos(x) + i sin(x).
∞
X
(x)2k
cos(x) = 21 (eix + e−ix ) =
(−1)k
(2k)!
(insbesondere: eiπ + 1 = 0)
sin(x) =
1
ix
2i (e
− e−ix ) =
k=0
Regel von l’Hospital: Sei x0 ∈ R, δ > 0:
f, g : (x0 − δ, x0 + δ)\{x0 } → R differenzierbar
g 0 (x) 6= 0 auf (x0 − δ, x0 + δ)\{x0 }
∃ lim (f (x)) = lim (g(x)) = 0 oder = ∞
x→x0
x→x0
(−1)k
k=0
=⇒ ∃ lim
∞
X
x→x0
f (x)
g(x)
Monotonieverhalten:
f : (a, b) → R differenzierbar auf (a, b): (1) ∀x ∈ (a, b) : f 0 (x) ≥ 0 ⇔ f
∀x ∈ (a, b) : f 0 (x) ≤ 0 ⇔ f
(2) ∀x ∈ (a, b) : f 0 (x) > 0 ⇒ f
∀x ∈ (a, b) : f 0 (x) < 0 ⇒ f
= lim
x→x0
f 0 (x)
g 0 (x)
= y0
(x)2k+1
(2k + 1)!
; −∞ ≤ y0 , x0 ≤ +∞
monoton wachsend
monoton fallend
streng monoton wachsend
streng monoton fallend
(isoliertes) lokales Minimum in x0 : f 0 (x0 ) ≤ 0 (<0) in (x0 − δ, x0 ) und f 0 (x) ≥ 0 (>0) in (x0 , x0 + δ)
(isoliertes) lokales Maximum in x0 : f 0 (x0 ) ≥ 0 (>0) in (x0 − δ, x0 ) und f 0 (x) ≤ 0 (<0) in (x0 , x0 + δ)
Sei f zusätzlich ein zweites Mal differenzierbar: f 0 (x0 ) = 0 ∧ f 00 (x0 ) > 0 ⇒ f hat ein isoliertes lokales Minimum in x0
f 0 (x0 ) = 0 ∧ f 00 (x0 ) < 0 ⇒ f hat ein isoliertes lokales Maximum in x0
Konvexität und Konkavität:
f : (a, b) → R heißt konvex auf (a, b)
⇐⇒ ∀x1 , x2 ∈ (a, b) : (∀α, β ∈ R ∧ 0 < α, β < 1 ∧ α + β = 1) : f (αx1 + βx2 ) < αf (x1 ) + βf (x2 )
f : (a, b) → R heißt konkav auf (a, b)
⇐⇒ ∀x1 , x2 ∈ (a, b) : (∀α, β ∈ R ∧ 0 < α, β < 1 ∧ α + β = 1) : f (αx1 + βx2 ) > αf (x1 ) + βf (x2 )
Ist f auf (a, b) konvex, so ist [−f (x)] auf (a, b) konkav.
folgende Aussagen sind äquivalent:
• f konvex auf (a, b)
konkav
x0
• für x1 < x < x2 gilt:
f (x)−f (x1 )
x−x1
<
f (x2 )−f (x1 )
x2 −x1
• für x1 < x < x2 gilt:
f (x)−f (x1 )
x−x1
<
f (x2 )−f (x)
x2 −x
konvex
Ist f (x) auf (a, b) differenzierbar, so gilt: - f 0 streng monoton wachsend ⇔ f ist konvex
- f 0 streng monoton fallend ⇔ f ist konkav
Ist f (x) auf (a, b) zweimal differenzierbar, so gilt: - f 00 (x) > 0 auf (a, b) ⇔ f ist konvex
- f 00 (x) < 0 auf (a, b) ⇔ f ist konkav
Wendepunkte:
Hat f einen Wendepunkt in x0 , so gilt: f 00 (x0 ) = 0 (notwendige Bedingung) und ∃f 000 (x0 ) 6= 0 (hinreichende Bedingung).
9
Analysis I
Prof. Schmeisser 2011-2012
F (x) heißt Stammfunktion von f (x) auf (a, b) ⇐⇒ F differenzierbar auf (a, b) und F 0 (x) = f (x) : ∀x ∈ (a, b).
Z
f (x) dx = F (x) + c mit c ∈ R.
1 ,x ≥ 0
Nicht jede Funktion besitzt eine Stammfunktion (z.B.: f (x) =
) und Stammfunktionen elementarer
0 ,x < 0
Z
cos(x)
Funktionen müssen keine elementaren Funktionen sein (z.B.:
dx).
x
Sei f : [a, b] → R, dann heißt f integrierbar auf [a, b], g.d.w. eine auf [a, b] stetige Stammfunktion von f auf (a, b)
Z b
existiert. Dann heißt
f (x)dx = F (b) − F (a) bestimmtes Integral.
a
Z
Z
Z
partielle Integration: u, v auf (a, b) differenzierbar und ∃ u · v 0 dx ⇒ ∃ u0 · v dx = u · v − u · v 0 dx.
R
(anwendbar auf:
Z
Integration durch Substitution:
p(x)eax dx,
R
p(x) ln(x)dx,
f (ϕ(x))ϕ0 (x)dx =
R
f : (a, b) → R, f (x) 6= 0 auf (a, b) und differenzierbar⇒
cos(ax)ebx dx,
Z
f (ϕ(x))ϕ0 (x)dx|x=ϕ−1 (u) + c.)
R
sin(ax)ebx dx.)
Z
f (u)du|u=ϕ(x)
(Entsprechend gilt die Umkehrung: ∃x = ϕ−1 , so gilt:
Z
R
p(x) arctan(x)dx,
Z
f (u)du =
f 0 (x)
dx = ln |f (x)| + c
f (x)
Transformationsformel: f : [a, b] → R integrierbar, ϕ : [c, d] → [a, b] bijektiv, streng monoton, stetig auf [c, d] und
!
Z b
Z d
Z b
Z ϕ−1 (b)
differenzierbar auf (c, d) ⇒
f (x)dx =
(f (ϕ(t)) · |ϕ0 (t)|) dt.
⇔
f (x)dx =
f (ϕ(t))ϕ0 (t)dt
a
ϕ−1 (a)
a
c
P (x)
, Grad(P )
Q(x)
< Grad(Q), P, Q keine gemeinsamen Nullstellen):
Integration rationaler Funktionen (R(x) =
Z
1
1.
dx = ln |x − x0 | + c
x − x0
Z
Z
(x − x0 )−k+1
1
1
1
dx
=
(x − x0 )−k dx =
+c=
+c
k 6= 1
2.
k
(x − x0 )
−k + 1
k − 1 (x − x0 )k−1
Z
Z
Z
a
2(x − α)
a
ax + b
1
3.
dx
=
dx+(aα+b)
dx = ln (x − α)2 + β 2 +(aα+b)I1 (x)
2
2
2
2
2
2
(x − α) + β
2
(x − α) + β
(x − α) + β 2
mit I1 (x) = β1 arctan x−α
+c
(β 6= 0)
β
Z
4.
ax + b
dx =
[(x − α)2 + β 2 ]k
(
a
R
b
R
R
2(x−α)
x
dx = a2 [(x−α)
2 +β 2 ]k dx
[(x−α)2 +β 2 ]k
1
dx = bIk (x)
[(x−α)2 +β 2 ]k
1
1
+ aαIk (x) = − a2 k−1
+ aαIk (x)
[(x−α)2 +β 2 ]k−1
mit β 2 Ik+1 (x) =
1−
1
2k
Ik (x) +
1
x−α
2k [(x − α)2 + β 2 ]k
d.h.: Integration aller rationalen Funktionen ist vollständig gelöst (⇒ Partialbruchzerlegung)!
P
a
uj v k
P (u,v)
Substitutionsregeln: (R(u, v) = Q(u,v)
= P b jkuj vk )
jk
√
n
√
√
R
t:= ax+b R
1. R(x, n ax + b), a 6= 0 −−−−−−−−→ R(x, n ax + b)dx = R
2. R x,
q
n
ax+b
cx+d
t:=ex
3. R(ex ) −−−→
R
t:=
R
R(t)
x
t dt|t=e
n
at
n−1
n
dt|t= √
ax+b =
R
n
R̃(t)dt|t= √
ax+b
q
n ax+b
cx+d
, a, c 6= 0, ad − bc 6= 0 −−−−−−−−→
R(ex )dx =
tn −b
a ,t
=
R
R
q
R
R x, n ax+b
R̃(t)dt|
cx+d dx =
t=
q
n ax+b
cx+d
R̃(t)dt|t=ex
√
√
R
R
x:=sinh(t) R
4. R(x, x2 + 1) −−−−−−→ R(x, x2 + 1)dx = R(sinh(t), cosh(t)) cosh(t)dt|t=arsinh(x) = R̃(et )dt|t=arsinh(x)
(⇒ vgl.: 3.)
10
Analysis I
5. R(x,
6. R(x,
7.
√
√
Prof. Schmeisser 2011-2012
x:=cosh(t)
x2 − 1)(|x| > 1) −−−−−−−→
x:=sin(t)
1 − x2 )(|x| < 1) −−−−−−→
u:=cos(x)
R
R
R(x,
R(x,
√
√
x2 − 1)dx =
1 − x2 )dx =
R
R
R̃(et )dt|t=arcosh(x)
R̃(sin(t), cos(t))dt|t=arcsin(x)
R
sin(x)R(cos(x))dx = − R(u)du|u=cos(x)
R
u:=sin(x) R
• cos(x)R(sin(x)) −−−−−−→ cos(x)R(sin(x))dx = R(u)du|u=sin(x)
• sin(x)R(cos(x)) −−−−−−→
R
R
R
u:=tan( x
1 − u2
2u
2) R
• R(cos(x), sin(x)) −−−−−−−→ R(cos(x), sin(x))dx = R(
,
) 2 2 du|u=tan( x ) = R̃(u)du|u=tan( x )
2
2
1 + u2 1 + u2 1+u
| {z } | {z }
Anmerkung zu 5. (und 6.): R(x,
√
x2 − 1) = R(x,
sin(x) cos(x) q
√
√
(⇒ vgl.: 2.)
x − 1 · x + 1) = R x, (x + 1) x−1
x+1
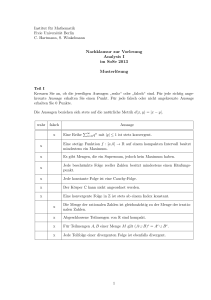
Riemann-Integral:
f : [a, b] → R beschränkt (∃c ∈ R : |f (x)| ≤ c), a = x0 < x1 < ... < xk−1 < xk < xk+1 < ... < xn = b,
P = {x0 , x1 , ..., xn }
Z = {I1 , I2 , ..., In }, Ik := [xk−1 , xk ] (k = 1, ..., n) heißt “von P erzeugte Zerlegung des Intervalls [a, b]” (⇔ Z ∼ P );
mit ∆xk = xk − xk−1 (Länge von Ik ) und d(Z) = max(∆xk )1≤k≤n (Feinheit der Zerlegung Z).
mk := inf x∈Ik (f (x)), m := inf x∈[a,b] (f (x)), Mk := supx∈Ik (f (x)), M := supx∈[a,b] (f (x)).
n
X
y
Untersumme (von f bezüglich Zerlegung Z): S(f, Z) =
mk ∆xk ,
k=1
Obersumme (von f bezüglich Zerlegung Z): S(f, Z) =
n
X
Mk ∆xk .
Mk
k=1
Mk+1
mk+1
Es gilt: m · (b − a) ≤ S(f, Z) ≤ S(f, Z) ≤ M · (b − a)
mk
Sei Z 0 eine Verfeinerung von Z, das heißt Z 0 ∼ P 0 mit P ⊂ P 0 ,
x
P 0 = {x00 , ..., x0N }, n < N :
a... xk−1
xk
xk+1 ... b
⇒ S(f, Z) ≤ S(f, Z 0 ) ≤ S(f, Z) + 2c(N − n)d(z)
S(f, Z 0 ) ≤ S(f, Z) ≤ S(f, Z) + 2c(N − n)d(z)
Z und Z ∗ seien beliebige Zerlegungen ⇒ S(f, Z) ≤ S(f, Z ∗ ).
Z b
Unterintegral von f :
f := sup(S(f, Z)) = sup ({S(f, Z) : Z Zerlegung von[a, b]})
Z
a
b
Z
f := inf (S(f, Z)) = inf {S(f, Z) : Z Zerlegung von[a, b]}
Oberintegral von f :
a
Z
Z
b
f heißt “Riemann-integrierbar” auf [a, b] (⇔ f ∈ R ([a, b])) :⇔
Z
b
∀ε > 0 : ∃δ(ε) > 0 : ∀ Zerlegungen mit d(Z) < δ(ε) :
b
Z
f :=
a
a
Z
b
f=
f.
a
Z
b
f − S(f, Z) < ε ∧ S(f, Z) −
f < ε.
a
a
n→∞
(Zn )n sei eine Folge von Zerlegungen des Intervalls [a, b] mit d(Zn ) −−−−→ 0:
Z b
Z b
lim (S(f, Zn )) =
f
f
∧
lim S(f, Zn ) =
n→∞
n→∞
a
a
f : [a, b] → R beschränkt; dann sind folgende Aussagen äquivalent:
1. f ∈ R ([a, b])
2. ∀ε > 0 : ∃δ(ε) > 0 : ∀ Zerlegungen Z mit d(Z) < δ(ε) : S(f, Z) − S(f, Z) < ε
3. ∀ε > 0 : ∃ Zerlegung Zε : S(f, Zε ) − S(f, Zε ) < ε
f : [a, b] → R beschränkt und monoton auf [a, b] ⇒ f ∈ R ([a, b]).
f : [a, b] → R stetig auf [a, b] ⇒ f ∈ R ([a, b]).
f gleichmäßig stetig auf U ∈ R ⇐⇒ ∀ε > 0 : ∃δ > 0 : ∀x, x0 ∈ U mit |x − x0 | < δ : |f (x) − f (x0 )| < ε.
(“Steigung” des Graphen unabhängig von der Stelle x für alle |x − x0 | < δ nach oben und unten beschränkt!)
f stetig auf [a, b] ⇒ f gleichmäßig stetig auf [a, b]; aber: f stetig auf (a, b) =⇒
6 f gleichmäßig stetig auf (a, b)!
11
Analysis I
Prof. Schmeisser 2011-2012
Hauptsatz der Differential- und Integralrechnung:
f : [a, b] → R sei Riemann-integrierbar, Φ : [a, b] → R stetig auf [a, b] und Stammfunktion von f :
Z
b
f = Φ(b) − Φ(a)
=⇒
Z
b
=
f (x)dx
a
a
Wobei:
1. f ∈ R ([a, b]) =⇒
6 ∃ Stammfunktion
2. ∃ Stammfunktion von f =⇒
6 f ∈ R ([a, b])
3. f stetig auf [a, b] ⇒ ∃ Stammfunktion
4. f stetig auf [a, b]\N , wobei N “Nullmenge”
(N endlich oder auch abzählbar unendlich),
12
dann f ∈ R ([a, b]).