Die Drehpunktfunktion
Werbung

Die Drehpunktfunktion
Edzard Salow
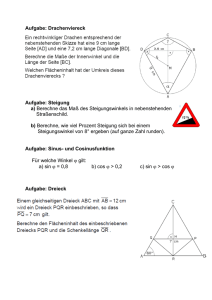
1) Beispiele:
Drehpunktfunktionen sind reellwertige Funktionen zur Beschreibung bestimmter ebener
Kurven. Dabei wird einer Winkelgröße α zur Festlegung der Richtung einer Geraden (meist
einer Tangente) durch einem Kurvenpunkt P eine signierte Bogenlänge zwischen P und einem
ausgezeichneten Kurvenpunkt N zugeordnet.
Man stelle sich vor, dass im Punkt N eine orientierte Tangentengerade gegeben ist. s sei ein
Parameter zur Bezeichnung des signierten Abstands für Punkte dieser Geraden von einem
Nullpunkt auf der Geraden, der bei N liegt, wenn die Tangente die Kurve bei N berührt. In
den folgenden Zeichnungen wird der Maßstab der Tangentengeraden durch einen Pfeil auf der
Tangentengeraden bestimmt, der vom Punkt zu s = -1 zum Punkt zu s = 1 zeigt. Der
Nullpunkt liegt also in der Mitte des Pfeils. Die Tangente wird nun auf der Kurve abgerollt.
Dem jeweiligen Richtungswinkel (Steigungswinkel) α der Tangente wird der Parameter s
zugeordnet, der zu dem jeweiligen Berührpunkt gehört. Dieser Wert ist der Funktionswert
f(α) der Drehpunktfunktion. Der Name 'Drehpunktfunktion' ist darin begründet, dass f(α) die
Lage des momentanen Drehpunktes auf der Geraden beim Abrollen beschreibt.
Für Kurven, die mehrere parallele Tangenten haben, kann die Beschreibung mit Hilfe einer
Drehpunktfunktion nur in Sonderfällen gelingen. Zwei dieser Sonderfälle sind in den
Abbildungen 1 und 2 dargestellt.
Abb.1
Abb.2
In Abbildung 1 werden die geradlinigen Teile der blauen Drehpunktkurve D durch die
Sprünge in der Drehpunktfunktion f berücksichtigt. Die linear ansteigenden Teile des
Graphen von f führen zu Kreisbögen. Der Abbildung 2 liegt die Funktion
f (α) = 0, 05(sign(α) ⋅ α 2 + 4π ⋅ α) (im Bogenmaß) zugrunde. Hier kommen verschiedene
Kurvenpunkte mit gleich orientierten parallelen Tangenten vor, für die sich die
Richtungswinkel um 2π = 360° unterscheiden. Es ist also nicht sinnvoll, Richtungswinkel zu
identifizieren, die sich um ein ganzzahliges Vielfaches von 360° unterscheiden. In Abbildung
3 wird ein Quadrat mit Hilfe einer Treppenfunktion erzeugt. In den Intervallen des
1
Richtungswinkelns α, in denen die Drehpunktfunktion konstant ist, dreht sich der Pfeil um
einen Eckpunkt. In diesem Fall wird man die Geraden nicht als Tangenten bezeichnen
können, da sie sich nur bei den Sprungstellen von f der Quadratkurve anschmiegen. Darum
wird in Folgenden die Bezeichnung 'Rollgerade' benutzt.
Abb. 3
Abb.4
Da die Drehpunktfunktionen in den Abbildungen 1, 2 und 3 monoton wachsend sind, bewegt
sich beim Abrollen der Geraden der momentane Drehpunkt immer in Pfeilrichtung. Die
Bogenlänge über einem Intervall [a ; b] von Richtungswinkeln ist darum durch f(b) – f(a)
gegeben. Anders ist es bei der Abbildung 4. Hier hat die Funktion f (α) = 0, 01α3 − 0, 2α an
den Stellen e1 = − 20 und e2 = 20 einen Extremwert und die Drehpunktkurve D in den
zugehörigen Punkten eine Spitze, in welcher der Drehpunkt die Bewegungsrichtung ändert.
Da die Bogenlänge die Gesamtlänge des Wegs ist, den der Drehpunkt zurücklegt, ergibt sich
die Bogenlänge hier als Summe von Beträgen
f (e1 ) − f (−360°) + f (e 2 ) − f (e1 ) + f (360°) − f (e2 ) .
2 ) Funktionsterm der Drehpunktkurve:
Punkte sind im Folgenden stets Elemente der komplexen Zahlenebene, insbesondere ist für sie
eine Addition definiert.
Es soll die Drehpunktkurve α → D(α ) als Funktion von einem Intervall [a ; b] reeller Zahlen
in die Menge C der komplexen Zahlen beschrieben werden. α gibt hierbei einen
Richtungswinkel an und D(α) einen Punkt, den die Rollgerade mit dem Steigungswinkel α
mit der Drehpunktkurve gemeinsam hat. Wenn ϕ und ψ zwei nahe beieinander liegende
Winkel sind, ist D(ψ ) − D(ϕ) ≈ eiϕ ⋅ (f (ψ) − f (ϕ)) , da der Abstand der Punkte D(ϕ) und D(ψ )
ungefähr gleich der Differenz der zugehörigen Drehpunktfunktionswerte ist und die Richtung
der Sekante durch D(ϕ) und D(ψ ) ungefähr mit der Richtung der Rollgeraden in D(ϕ)
übereinstimmt. Der Fehler nähert sich Null beim Grenzübergang ψ → ϕ . Dies gilt auch für
Sprungstellen von f, für die der links- oder rechtsseitige Limes lim(f (ψ ) − f (ϕ)) ≠ 0 ist. Die
ψ→ϕ
Summation von Differenzen der Form D(ψ ) − D(ϕ) und ein anschließender Grenzübergang
α
führt zum Stieltjes-Integral
∫e
iϕ
df (ϕ) zur Angabe der Differenz D(α) − D(0) . Damit das
0
2
Stieltjes-Integral definiert ist, setzen wir die beschränkte Variation von f voraus, was bedeutet,
dass f sich als Differenz zweier monoton wachsender Funktionen darstellen lässt.
Definition: [a ; b] sei ein Intervall reeller Zahlen, das die Null enthält. f sei eine Funktion
von [a ; b] in die Menge R reeller Zahlen mit beschränkter Variation.. Dann heißt die Kurve
α
Df : α → ∫ eiϕdf (ϕ) + f (0) Drehpunktkurve zur Drehpunktfunktion f . (Wenn im Folgenden
0
nur eine Drehpunktfunktion eine Rolle spielt, wird auch die Bezeichnung D ohne f benutzt).
Unter der Bogenlänge der Drehpunktkurve über dem Intervall [c ; d] von Richtungswinkeln
d
wird die Totalvariation
∫ df
von f über [c ; d] verstanden, das heißt das Supremum der
c
n
Menge von Summen der Form
∑ f (α
ν=1
ν
) − f (α ν−1 ) mit c = α 0 < α1 < ... < α n −1 < α n = d .
Aus der Definition folgt unmittelbar: Df (α) + Dg (α) = Df + g (α) und Drf (α) = r ⋅ Df (α) für
alle α aus dem Durchschnitt der Definitionsbereiche von f und g und für r ∈ R .
Wenn die Funktion f von beschränkter Variation ist, existiert für jede Stelle α der linksseitige
Limes f (α − 0) = lim f (ϕ) und der rechtsseitige f (α + 0) = lim f (ϕ) . Sprungstellen sind die
ϕ→α−
ϕ→α+
Stellen, an denen diese beiden Werte nicht übereinstimmen. An diesen Stellen gibt es nach
der obigen Definition auch einen Sprung in der Drehpunktkurve zwischen den Punkten
Df (α − 0) = lim Df (ϕ) und Df (α + 0) = lim Df (ϕ) . Diese Lücke wird in den Abbildungen
ϕ→α−
ϕ→α+
stets durch eine geradlinige Verbindung geschlossen. Bei der Definition der Bogenlänge sind
diese geradlinigen Stücke aber in sinnvoller Weise berücksichtigt.
Wenn eine Funktion f auf [a ; b] stetig differenzierbar ist, so kann man die Stieltjesα
Integralfunktion durch die riemannsche Integralfunktion Df : α → ∫ f ′(ϕ) ⋅ eiϕdϕ + f (0)
0
ersetzen. Dann ist auch Df stetig differenzierbar mit der Ableitung D′f (α) = f ′(α) ⋅ eiα . Da hier
D′f (α) ein Tangentenvektor mit dem Betrag f ′(α) ist, errechnet man
d
∫ f ′(ϕ) dϕ für die
c
Bogenlänge über [c ; d]. Dieser Wert ergibt sich aber auch als Totalvariation über [c ; d].
Insofern gibt es keinen Widerspruch zu der oben angegebenen Definition der Bogenlänge.
3) Nullkurve und s-Kurve:
Die hellblauen Nullkurven in den Abbildungen 5 und 6 sind die Spuren der Pfeilmitte bei der
Bewegung des Pfeils. Sie gehören zum Parameterwert s = 0. Die roten 0,5-Kurven sind die
Spuren des Punktes auf dem Pfeil mit dem Parameterwert s = 0,5. Es ergeben sich Evolventen
der Drehpunktkurve. In Abbildung 5 setzt sie sich aus Kreisbögen zusammen, da die
1
Drehpunktfunktion eine Treppenkurve ist. Bei der Drehpunktfunktion f (α ) = sin( x) in
3
Abbildung 6 ergibt sich für die Nullkurve wie für die Drehpunktkurve eine Kardioide.
In Abbildung 5 besteht die Drehpunktkurve aus den Eckpunktes eines Polygons, bei dem die
Rollgerade "innen abrollt", im Unterschied zu Abbildung 3, wo die Rollgerade " außen
3
abrollt". Dieser Unterschied drückt sich darin aus, dass f in Abbildung 3 monoton ist, in
Abbildung 5 aber nicht.
Abb. 5
Abb. 6
Definition: Es sei s ∈ R und f Drehpunktfunktion mit der Drehpunktkurve Df(α). Dann wird
die Kurve
As,f (α) = Df (α) + (s − f (α)) ⋅ eiα als 'zugehörige s-Kurve' bezeichnet. Wenn
im Folgenden nur eine Drehpunktfunktion eine Rolle spielt, wird auch die Bezeichnung A s
statt A s,f benutzt.
Aus der Definition folgt: As + t,f + g (α) = A s,f (α) + A t,g (α) und A rs,rf (α) = r ⋅ As,f (α) für
alle α aus dem Durchschnitt der Definitionsbereiche von f und g und für r ∈ R .
Satz 1 : f habe über dem Intervall [a , b] mit 0 ∈ [ a , b] beschränkte Variation. Dann ist die
zu f gehörige s-Kurve stetig und es gilt
α
A s (α ) = i ∫ (s − f (ϕ))eiϕ dϕ + s .
0
Beweis:
Auf Grund der Regel für die partielle Integration des Stieltjes-Integrals gilt:
α
iα
A s (α ) = D(α ) + (s − f (α)) ⋅ e =
∫e
iϕ
df (ϕ) + f (0) + (s − f (α)) ⋅ eiα =
0
α
f (α ) ⋅ eiα − f (0) ⋅ ei⋅0 − ∫ f (ϕ)deiϕ + f (0) + (s − f (α )) ⋅ eiα =
0
α
α
0
iϕ
α
− ∫ f (ϕ) ⋅ ie dϕ + ∫ s ⋅ ie dϕ + s = i ∫ (s − f (ϕ))eiϕ dϕ + s .
0
iϕ
0
Die Stetigkeit von A s folgt aus der Darstellung als riemannsche Integralfunktion.
4
Wenn f stückweise (d.h. bis auf endlich viele Sprungstellen) stetig ist, existiert bis auf
endlich viele Stellen α ein eindeutiger Tangentenvektor i ⋅ (s − f (α)) ⋅ eiα , der senkrecht zur
Rollgeraden steht. Die Bogenlänge der s-Kurve über dem Intervall [c ; d] ist dann durch
d
∫ i ⋅ (s − f (ϕ)) ⋅ e
iϕ
d
dϕ = ∫ s − f (ϕ) dϕ gegeben.
c
c
Definition: Die gerichtete Gerade durch einen Punkt A s (α) der zu f gehörigen s-Kurve mit
dem Richtungswinkel α + 90° sei 'Stützgerade von As bei α' genannt und mit g s (α) oder
g s,f (α ) bezeichnet. Unter dem signierten Abstand eines Punktes P von g s (α ) verstehen wir
die Zahl, deren Betrag den Abstand von g s (α ) angibt und deren Vorzeichen oder + ist, je
nachdem, ob P rechts oder links von g s (α ) liegt.
Der signierte Abstand des Punktes A s (β) von g s (α ) sei mit d s (α, β) bezeichnet.
Die Punkte der Stützgeraden g s (α ) haben die Parameterdarstellung A s (α ) + t ⋅ ieiα mit t ∈ R .
α
Satz 2. Es sei
A s (α ) = i ∫ (s − f (ϕ))eiϕ dϕ + s die zu f gehörige s-Kurve. Dann gilt
0
β
1.
d s (α, β) = ∫ (s − f (ϕ)) sin(ϕ − α)dϕ .
α
2. Wenn s obere (bzw. untere) Schranke von f ist, dann ist d s (α, β) positiv (bzw.
negativ) oder Null für alle β ∈ [α − π, α + π] .
d s (α, β) ⋅ ieiβ + d s (β, α) ⋅ ieiα = (As (β) − As (α)) ⋅ sin(β − α)
d s (β, α)
⋅ ieiα der Schnittpunkt der
4. Im Fall sin(β − α) ≠ 0 ist As (α) +
sin(β − α)
3.
Stützgeraden g s (α ) und g s (β) .
5. Wenn g s (α ) von den Stützgeraden g s (β) und g s ( γ ) in den Punkten Pβ bzw. Pγ
d s (β, α )
d ( γ, α )
− s
der Abstand Pβ − Pγ , wenn der
sin(β − α) sin( γ − α)
Pfeil von Pγ nach Pβ in die Richtung ieiα von g s (α ) zeigt; andernfalls ist
geschnitten wird, dann ist
d s (β, α )
d ( γ, α )
− s
gleich − Pβ − Pγ .
sin(β − α) sin( γ − α)
6. Die paarweise verschiedenen Stützgeraden g s (α ) , g s (β) und g s ( γ ) haben genau
dann einen Punkt gemeinsam, wenn sin(β − α) ≠ 0 , sin( γ − α) ≠ 0 und
d s (β, α ) ⋅ sin( γ − α) = d s ( γ , α) ⋅ sin(β − α ) ist.
Beweis:
1) Der signierte Abstand ist der Realteil der komplexen Zahl
(A s (α) − A s (β)) ⋅ e
− iα
α
= i ∫ (s − f (ϕ))ei( ϕ−α ) dϕ
β
5
α
α
β
β
= i ∫ (s − f (ϕ)) cos(ϕ − α)dϕ − ∫ (s − f (ϕ)) sin(ϕ − α)dϕ .
2) Wenn s obere Schranke von f ist, so ist
(s − f (ϕ)) ⋅ sin(ϕ − α ) ≥ 0 für alle
β
ϕ∈ [α, α + π] , also
∫ (s − f (ϕ)) sin(ϕ − α)dϕ ≥ 0 für β ∈ [α, α + π] . Für alle
α
ϕ∈ [α − π, α ] ist (s − f (ϕ)) ⋅ sin(ϕ − α ) ≤ 0 , also
β
α
α
β
∫ (s − f (ϕ)) sin(ϕ − α)dϕ = −∫ (s − f (ϕ)) sin(ϕ − α)dϕ ≥ 0 für β ∈ [α − π, α] .
Wenn s untere Schranke ist, ändern sich die Vorzeichen.
3)
β
β
α
α
d s (α, β) ⋅ ieiβ + d s (β, α ) ⋅ ieiα = ∫ (s − f (ϕ)) sin(ϕ − α )dϕ ⋅ ieiβ − ∫ (s − f (ϕ)) sin(ϕ − β)dϕ ⋅ ieiα
=
β
α
β
α
β
β
1
1
(s − f (ϕ))(ei( ϕ−α ) − e −i( ϕ−α ) )dϕ⋅ eiβ − ∫ (s − f (ϕ))(ei( ϕ−β ) − e− i( ϕ−β) )dϕ⋅ eiα =
∫
2α
2β
1
1
i( ϕ−α+β )
i( −ϕ+α+β )
(s
−
f
(
ϕ
))(e
−
e
)d
ϕ
−
(s − f (ϕ))(ei( ϕ−β+α ) − ei( −ϕ+α+β ) )dϕ =
∫
∫
2α
2β
1
1
i( ϕ−α+β )
i( ϕ−β+α )
(s
−
f
(
ϕ
))(e
−
e
)d
ϕ
(s − f (ϕ))eiϕdϕ ⋅ (ei( −α+β ) − ei( −β+α ) ) =
=
∫
∫
2α
2α
β
i ⋅ ∫ (s − f (ϕ))eiϕ dϕ ⋅
α
1 i( −α+β ) i( −β+α )
(e
−e
) = (As (β) − As (α)) ⋅ sin(β − α)
2i
4) Aus 3) folgt A s (α ) +
d s (β, α)
d ( α , β)
⋅ ieiα = A s (β) + s
⋅ ieiβ , wenn sin(β − α) ≠ 0 ist.
sin(β − α )
sin(α − β)
d s (β, α)
d ( γ, α)
⋅ ieiα und Pγ = A s (α) + s
⋅ ieiα ist und der
sin(β − α)
sin( γ − α)
iα
Richtungsvektor ie den Betrag 1 hat.
6) folgt unmittelbar aus 5)
5) folgt daraus, dass Pβ = A s (α) +
Beispiel : Für f(α) = sin(3α) und s = 0 erhält man die Nullkurve der Steiner-Zykloide, die
selbst eine Steiner-Zykloide ist (vgl.Abb.7 und Abb.16). Dann ist
d s (β, α)
d ( γ, α)
1
− s
= (cos(α + 2β) − cos(α + 2 γ )) .
sin(β − α) sin( γ − α) 4
Der Term wird Null genau dann, wenn α + β + γ = 0 ist. Dies ist also bei der Steiner-Zykloide
die Bedingung dafür, dass drei Tangenten einen Punkt gemeinsam haben.
6
4) Funktionsterm der Evolute:
Die Abbildungen 7 und 8 zeigen als orangefarbene Kurven die Evoluten der Steiner-Zykloide
und der Cornu-Spirale (Klothoide). Bei der Cornu-Spirale wächst die Krümmung proportional
mit der Bogenlänge. Die Drehpunktfunktionen sind f (α ) = sin(3α) bzw. f (α ) = α . Die
Evolute ist als geometrischer Ort der Krümmungsmittelpunkte definiert. Der zum Punkt D(α)
der dunkelblauen Kurve gehörige Krümmungsmittelpunkt E(α) liegt auf der Normalen in
D(α). Der Abstand von D(α) und E(α) ist der Krümmungsradius. Die Evoluten werden
ebenfalls als Drehpunkt-Kurven erzeugt und zwar mit der Ableitung von f als DrehpunktFunktion, allerdings gehört dabei zum Richtungswinkel α = 0 die Richtung der Hochachse.
Die Drehpunkt-Kurve von f ist die Nullkurve der zugehörigen Evolute.
Abb. 7
Abb. 8
Zur Bestimmung des Funktionsterms der Evolute setzen wir in diese Abschnitt voraus, dass
die Drehpunktfunktion f im Intervall [a ; b] zweimal stetig differenzierbar ist. Null sei
Element von [a ; b].
f (α + ∆α ) − f (α )
f ′(α ) = lim
ist der signierte Krümmungsradius von D bei α, denn
∆α→ 0
∆α
f (α + ∆α ) − f (α) gibt hier für genügend kleines ∆α eine signierte Bogenlänge an und ∆α
die zugehörige Winkeländerung. Darum ist f ′(α ) ⋅ ieiα der Verbindungsvektor von D(α) und
E(α), also E(α) = D(α ) + i ⋅ f ′(α) ⋅ eiα .
Eine andere Darstellung für E(α) zeigt die partielle Integration:
α
α
iϕ
E(α) − i ⋅ f ′(α ) ⋅ e = D(α ) = e df (ϕ) + f (0) = f ′(ϕ)e dϕ + f (0) =
∫
iα
iϕ
∫
0
0
α
1
1
1
f ′(α) ⋅ ⋅ eiα − ⋅ f ′(0) − ∫ f ′′(ϕ) ⋅ eiϕ dϕ + f (0) =
i
i
i
0
7
α
−i ⋅ f ′(α) ⋅ e + i ⋅ f ′(0) + i ∫ f ′′(ϕ) ⋅ eiϕ dϕ + f (0) .
iα
0
α
Also ist E(α ) = i ⋅ f ′′(ϕ) ⋅ e dϕ + f (0) + i ⋅ f ′(0) .
∫
iϕ
0
5) Richtungswinkel als neuer Parameter:
Satz 3: I sei ein Intervall reeller Zahlen, das die Null enthält. h sei eine zweimal stetig
differenzierbare Funktion von I in die Menge R reeller Zahlen mit h(0) = 0, h ′(0) = 0 und
h ′′(x) > 0 für alle x ∈ I . Dann existiert die Umkehrfunktion g der Ableitung von h. Definiert
α
g′(tan(ϕ))
dϕ für α ∈ arctan(h '(I )) , dann liegen die Punkte der Drehpunktkurve
(cos(ϕ))3
0
von f auf dem Graphen von h.
Beweis: g existiert, da h ' streng monoton steigend ist wegen h ′′(x) > 0 für alle x ∈ I . Aus
g(h ′(x)) = x folgt nach der Kettenregel g′(h ′(x)) ⋅ h ′′(x) = 1 . Für den Steigungswinkel ϕ im
Punkt (x ; h(x)) gilt tan(ϕ) = h '(x), also x = g(tan(ϕ)) .
man f (α) := ∫
Es folgt f ′(ϕ) =
g′(tan(ϕ))
1
=
. Für die Drehpunktkurve von f ist
3
3
(cos(ϕ))
(cos(ϕ)) ⋅ h ′′(g(tan(ϕ)))
dann
α
α
0
0
D(α) = ∫ f ′(ϕ) ⋅ eiϕdϕ + f (0) = ∫ (f ′(ϕ) ⋅ cos(ϕ) +i f ′(ϕ) ⋅ sin(ϕ))dϕ =
α
∫ (cos( κ))
0
2
1
tan(ϕ)
+i
dϕ .
2
⋅ h ′′(g(tan(ϕ)))
(cos(ϕ)) ⋅ h ′′(g(tan(ϕ)))
Mit der Substitution ϕ = arctan(h ′(x)) folgt daraus wegen
h ′′(x)
h ′′(g(tan(ϕ)))
dϕ =
dx =
dx = (cos(ϕ)) 2 h ′′(g(tan(ϕ)))dx :
2
2
′
1 + h (x)
1 + (tan(ϕ))
g (tan( α ))
D(α ) =
∫
(1 +i h ′(x))dx =g(tan(α)) +i h(g(tan(α )) .
0
Dies ist ein Punkt des Graphen von h.
Einige Bespiele:
h(x)
Kettenlinie
0,5(ex + e–x) ─1
Parabel
0,5x2
Kosinus-Bogen 1 ─ cos(x)
Ellipse
1–√(1 ─ k2x2)
Traktrix
ln(√(x·(2 – x)) + 1) – ln(1 – x)
– √(x·(2 – x))
8
g(y)
arsinh(y)
y
arcsin(y)
y / (k √(y2 + k2))
1– (y2 + 1) –0,5
f '(ϕ)
cos(ϕ)–2
cos(ϕ)–3
2/(√(cos(2x))(cos(2x)+1))
k(1+(k2–1)(cos(ϕ))2)─1,5
tan(ϕ)
6) n-periodische Drehpunktfunktionen:
In der folgenden Definition wird der Definitionsbereich auf ganz R erweitert.
Definition: n sei eine natürliche Zahl ≠ 0. Eine Funktion f von der Menge R der reellen
Zahlen in sich heißt n-periodische Drehpunktfunktion, wenn gilt:
1. f (α + 2π ⋅ n) = f (α ) für alle α ∈ R ,
2. f hat im Intervall [0; 2π ⋅ n] beschränkte Variation,
2 π⋅n
3.
∫
eiϕdf (ϕ) = 0 .
0
Die Kurven D(α), As(α) und E(α) werden mit den oben angegebenen Funktionstermen auf
ganz R definiert. Aus der Definition folgt unmittelbar:
D(α + 2π ⋅ n) = D(α) , A s (α + 2π ⋅ n) = A s (α) und E(α + 2π ⋅ n) = E(α) für alle α ∈ R .
Wegen
0 = f (2π ⋅ n) ⋅ e
i⋅2 π⋅n
i ⋅0
− f (0) ⋅ e =
2 π⋅n
∫
iϕ
e df (ϕ) +
0
2 π⋅n
∫
0
eiϕdf (ϕ) + i ⋅
2 π⋅n
∫
2 π⋅n
∫
f (ϕ)deiϕ =
0
f (ϕ)eiϕ dϕ ist die dritte Eigenschaft äquivalent mit
0
2 π⋅n
∫
f (ϕ)eiϕdϕ = 0 .
0
m
α ) mit m ≠ n ist ein Beispiel einer n-periodischen
n
Drehpunktfunktion (vgl. Abb. 6 und 7). Die Funktion in Abbildung 5 lässt sich periodisch
fortsetzen, die in den Abbildungen 1, 2, 3, 4 und 8 aber nicht, da die dritte Eigenschaft hier
nicht erfüllt ist.
Die Funktion f (α ) = sin(
Abb. 9
Abb.10
Die Abbildungen 9 und 10 zeigen die blaue Drehpunktkurve und je zwei s-Kurven (s = 1 und
s = 2,1) für 2-periodische Drehpunktfunktionen. Bei Abbildung 9 wurde die Funktion
ϕ
ϕ → ϕ − 2π, ϕ ∈ [0 ; 4π] periodisch zu ϕ → ϕ − 4π ⋅ floor − 2π, ϕ∈ R auf ganz R
4π
fortgesetzt. Diese Funktion erfüllt dann aber nicht die Eigenschaft 3. Durch Subtraktion von
9
u ⋅ sin(ϕ) mit u =
4π
∫ (ϕ − 2π) ⋅ sin(ϕ)dϕ ergibt sich eine 2-periodische Funktion, nämlich
0
ϕ
f (ϕ) = ϕ − 4π ⋅ floor − 2π + 2sin(ϕ) , ϕ∈ R .
4π
1
In Abbildung 10 war die Ausgangsfunktion ϕ → (ϕ − 2π)2 , ϕ ∈ [0 ; 4π] . Auch diese
4
1
ϕ
Funktion wurde periodisch auf ganz R fortgesetzt: ϕ → (ϕ − 4π ⋅ floor − 2π) 2 , ϕ∈ R .
4
4π
Eine 2-periodischen Drehpunktfunktion ergibt sich durch Subtraktion von v ⋅ cos(ϕ) mit
v=
4π
1
∫ 4 ( ϕ − 2 π)
1
ϕ
(ϕ − 4π ⋅ floor − 2π) 2 − cos(ϕ) , ϕ∈ R .
4
4π
⋅ cos(ϕ)dϕ , nämlich f (ϕ) =
2
0
Satz 4: Es seien für f die erste und zweite Eigenschaft der n-periodischen Funktionen erfüllt.
Sei u :=
1
π⋅n
2 π⋅n
∫
f (ϕ) ⋅ cos(ϕ)dϕ und v :=
0
1
π⋅n
2 π⋅n
∫
f (ϕ) ⋅ sin(ϕ)dϕ . Dann ist die Funktion
0
g(ϕ) := f (ϕ) − u ⋅ cos(ϕ) − v ⋅ sin(ϕ) n-periodisch.
Beweis: g erfüllt offenbar die ersten beiden Eigenschaften. Zur dritten Eigenschaft errechnet
2 π⋅n
man:
∫
g(ϕ) ⋅ eiϕdϕ =
0
2 π⋅n
∫
2 π⋅n
∫
f (ϕ) ⋅ eiϕdϕ − u ⋅
2 π⋅n
0
∫
cos(ϕ) ⋅ eiϕdϕ − v ⋅
0
2 π⋅n
∫
sin(ϕ) ⋅ eiϕdϕ =
0
f (ϕ) ⋅ eiϕdϕ − u ⋅ nπ − v ⋅ inπ = .
0
2 π⋅n
∫
f (ϕ) ⋅ eiϕdϕ −
0
2 π⋅n
∫
f (ϕ) ⋅ cos(ϕ)dϕ − i ⋅
0
2 π⋅n
∫
f (ϕ) ⋅ sin(ϕ)dϕ = 0
0
Satz 5: Es seien für f die ersten beiden Eigenschaft der n-periodischen Funktionen erfüllt. p
q
und q seien natürliche Zahlen mit p > 1, 1 ≤ q ≤ p-1 und f (α + 2π ⋅ ⋅ n) = f (α) für alle
p
p
α ∈ R . ⋅ n sei keine natürliche Zahl. Dann ist f n-periodisch.
q
q
Beweis: Sei τ = 2π ⋅ ⋅ n und c =
p
2 π⋅n
∫
f (ϕ) ⋅ eiϕdϕ .
0
q
Wegen f (ϕ + 2π ⋅ ⋅ n) = f (ϕ) ist f (ϕ − j ⋅ τ) = f (ϕ) für alle ϕ ∈ R .
p
iτ
Wegen (1 − e ) ⋅
p −1
∑e
j= 0
j⋅iτ
= 1− e
p⋅iτ
= 0 und 1 − e ≠ 0 ist
iτ
Daraus folgt mit Hilfe einer Substitution ϕ → ϕ + j ⋅ τ :
10
p −1
∑e
j= 0
j⋅iτ
=0.
p⋅c = p⋅
2 π⋅n
∫
p −1 2 π⋅n
f (ϕ) ⋅ e dϕ = ∑
iϕ
j= 0
0
p −1 2 π⋅n − j⋅τ
∑ ∫
j= 0
∫
f (ϕ − j ⋅ τ) ⋅ e dϕ = ∑
j= 0
0
p −1 2 π⋅n
f (ϕ) ⋅ eiϕdϕ⋅ ei⋅ jτ = ∑
j= 0
− j⋅τ
p −1 2 π⋅n − j⋅τ
iϕ
∫
∫
f (ϕ) ⋅ ei( ϕ+ j⋅τ) dϕ =
− j⋅τ
p −1
f (ϕ) ⋅ eiϕdϕ⋅ ei⋅ jτ = c ⋅ ∑ ei⋅ jτ = 0 . Also ist c = 0.
j= 0
0
7) Verschiebung des Funktionsgraphen:
Im Folgenden werden wir nur noch 1-periodische Drehpunktfunktionen untersuchen. In Satz
6 soll die geometrische Bedeutung der Verschiebung des Funktionsgraphen für die
Drehpunktkurve und die zugehörigen s-Kurven behandelt werden.
Satz 6: Sei s, τ ∈ R . f sei eine 1-periodische Drehpunktfunktion und g(ϕ) = f (ϕ − τ) für alle
ϕ∈ R . Dann ist
iτ
iτ
1. Dg (α + τ) = Df (α ) ⋅ e − Df (−τ) ⋅ e + f (−τ)
iτ
iτ
2. A s, g (α + τ) = A s, f (α ) ⋅ e − A s, f ( −τ) ⋅ e + s .
Beweis:
α+τ
∫e
Dg (α + τ) − g(0) =
iϕ
dg(ϕ) =
0
α
−τ
0
0
α+τ
∫e
iϕ
df (ϕ − τ) =
α
∫e
i( ϕ+τ )
df (ϕ)
−τ
0
= ∫ eiϕdf (ϕ) ⋅ eiτ − ∫ eiϕdf (ϕ) ⋅ eiτ
= (Df (α) − f (0)) ⋅ eiτ − (Df (−τ) − f (0)) ⋅ eiτ = Df (α) ⋅ eiτ − Df (−τ) ⋅ eiτ
A s, g (α + τ) − s = i ⋅
α+τ
∫
(s − g(ϕ))eiϕdϕ = i ⋅
0
α
i ⋅ ∫ (s − f (ϕ))e
−τ
i( ϕ+τ )
α+τ
∫
(s − f (ϕ − τ))eiϕ dϕ =
0
α
dϕ = i ⋅ ∫ (s − f (ϕ))e
i( ϕ+τ )
−τ
dϕ − i ⋅ ∫ (s − f (ϕ))ei( ϕ+τ ) dϕ
0
0
iτ
iτ
= (As,f (α) − s)eiτ − (A s,f (−τ) − s)eiτ = As,f (α) ⋅ e − As, f (−τ) ⋅ e .
Definition: Sei τ ∈ R . Eine Punktmenge M sei τ-invariant genannt, wenn es eine Drehung mit
dem Drehwinkel τ gibt, die M auf sich abbildet.
Folgerung aus Satz 5: Wenn f (ϕ) = f (ϕ − τ) gilt für alle ϕ∈ R , dann ist die Drehpunktkurve
von f und die zugehörige s-Kurve τ-invariant.
8) Tangenten-Pfeilecke:
Die Drehpunktfunktion bei den Abbildungen 11 und 12 gehören zu f : x sin(2α) . Die
Drehpunktkurve ist eine Astroide. An die beiden s-Kurven (s = 1 bzw. s = 0) sind in den
2π
Punkten A s α + j ⋅ für natürliche j zwischen 0 und 4 die Stützgeraden gezeichnet, die
5
11
hier Tangenten sind. Die Tangenten zu j = 4 und j = 0 schneiden sich im Punkt T0 , die zu j –1
und j für j = 1, 2 , 3 und 4 im Punkt Tj. Zyklisch aufeinanderfolgende Punkte sind durch
einen Pfeil miteinander verbunden, und zwar so, dass der Pfeil die Richtung der Stützgeraden
angibt (blau für j = 0). Wird das Pfeileck in der Reihenfolge T0 T1 T2 T3 T4 T0 durchlaufen,
und wird dabei beginnend bei Null die Pfeillänge beim Laufen in Pfeilrichtung addiert und
beim Laufen gegen die Pfeilrichtung subtrahiert, dann ergibt sich ein Wert, der hier als
π
Umfang des Pfeilecks bezeichnet wird. In Abbildung 11 ist er 10 ⋅ tan ≈ 7, 27 und in
5
Abbildung 12 Null. Bemerkenswerter Weise ändern sich diese Zahlen nicht, wenn man α
verändert. Das gilt auch für andere s-Kurven zu f. Der Umfang stimmt mit dem gewöhnlichen
Umfang eines Vielecks überein, wenn s obere Schranke von f ist. Wenn s untere Schranke
von f ist, ergibt sich der Umfang als negative Zahl, deren Betrag mit dem gewöhnlichen
Umfang übereinstimmt.
Abb. 11
Abb. 12
Die Funktion f : x sin(2α) ist insofern eine ausgezeichnete Drehpunktfunktion, als sich
für jedes natürliche n >2 an Stelle von n = 5 ein von α unabhängiger Umfang ergibt, falls die
Innenwinkel des Tangenten-Pfeilecks alle gleich groß sind..
Definition: Es sei f eine 1-periodische Drehpunktfunktion, s ∈ R und Z eine Folge
α0 < α1 <...< αn-1 von n > 2 Winkeln in dem Intervall [0° ; 360°[. Sei αn = α0. Weiter sei Tj
der Schnittpunkt der Stützgeraden g s (α j−1 ) und g s (α j ) für j = 1, .. , n und T0 = Tn. Die
Signatur rj habe für 0 ≤ j ≤ n–1 den Wert 1, wenn der Pfeil von Tj nach Tj+1 in Richtung der
orientierten Geraden g s (α j ) zeigt, sonst den Wert –1. Unter einem Z-Tangenten-Pfeileck
verstehen wir dann die Folge j (Tj ; rj) . Der Umfang des Z-Tangenten-Pfeilecks sei
n −1
∑r ⋅ TT
j= 0
j
j
j+1
.
12
m
⋅ 2π ist mit 1 ≤ m ≤ n − 1 , so nennen wir das Z-Tangenten-Pfeileck auch
n
(n,m,α)-Tangenten-Pfeileck. Wenn Z aus den Winkeln α, α + τ, α + π, α + τ + π besteht,
verwenden wir auch die Bezeichnung (α,τ)-Tangenten-Parallelogramm oder TangentenParallelogramm mit dem Innenwinkel τ.
Wenn α j = α + j ⋅
Abb. 13
Abb.14
Die Abbildungen 13 und 14 veranschaulichen Tangentenparallelogramme zu den Funktionen
f (α) = −(−1)floor(2α/ π) und f (α) = sin(4α) zu s = 1 bzw. s = 0,4 und mit den Innenwinkeln
90° bzw. 45°. Die Umfänge der Pfeillecke sind Umfange im gewöhnlichen Sinn. Sie sind für
8 ⋅ 0, 4
alle Winkel α konstant 8 bzw.
≈ 4,53 . Ein entsprechender Sachverhalt zeigt sich bei
sin(45°)
allen Funktionstermen in der Form f(ϕ) = sin(nϕ) mit einem natürlichen n ≥ 2 . Für ungerade
n haben die 1-Kurven dabei konstante Breiten; die umschließenden Tangenten-Rechtecke sind
also alle Quadrate mit konstanter Seitenlänge. Der Grund für die Konstanz der Umfänge liegt
in diesen Fällen darin, dass eine Verschiebung des Funktionsgraphen in ϕ-Richtung den
Graphen von f in den von –f überführt.
Definition : Mit bs(α) sei der signierte Abstand des Punktes A s (α + π) von der Stützgeraden
g s (α ) bei der s-Kurve einer 1-periodischen Drehpunktfunktion verstanden.
Da g s (α + π) und g s (α ) in entgegengesetzte Richtungen zeigen, hat der signierte Abstand
des Punktes A s (α ) von der Stützgeraden g s (α + π) denselben Wert, so dass also stets
bs (α + π) = bs (α ) gilt. Außerdem gilt für alle Winkel β : bs (α ) = d s (α, β) + d s (α + π, β)
13
Satz 7 : f sei eine 1-periodische Drehpunktfunktion, s ∈ R und A s die zu f gehörigen s-Kurve.
Dann gilt:
π
1. Für jedes α ∈ R ist
b(α) = 2s − ∫ f (ϕ + α ) sin(ϕ)dϕ .
0
2. Wenn f (ϕ − π) + f (ϕ) eine Konstante c ist für alle ϕ∈ R , dann ist b(α)
konstant 2s − c .
3. Wenn τ ∈ [0 ; π[ und f (ϕ − τ) + f (ϕ) eine Konstante c ist für alle ϕ∈ R , dann haben
alle Tangenten-Parallelogramme der s-Kurve mit dem Innenwinkel τ den gleichen
8s − 4c
Umfang
.
sin(τ)
m
4. Wenn τ = ⋅ 2π für natürliche Zahlen m, n mit n > 2 und 1 ≤ m ≤ n − 1 und
n
n −1
∑ f (ϕ − jτ) eine Konstante c ist für alle ϕ∈ R , dann haben alle (n,m,α)j= 0
Tangenten-Pfeilecke der s-Kurve unabhängig von α den gleichen Umfang
m
2(ns − c) ⋅ tan ⋅ π .
n
Beweis: 1) Für den Abstand des Punktes A s (α + π) von g s (α ) ergibt sich nach Satz 2 mit der
Substitution ϕ → ϕ + α :
α+π
∫
α
π
π
0
0
(s − f (ϕ)) sin(ϕ − α)dϕ = ∫ (s − f (ϕ + α )) sin(ϕ)dϕ = 2s − ∫ f (ϕ + α) sin(ϕ)dϕ
. 2)3) Aus f (ϕ − τ) + f (ϕ) = 0 folgt :
π
π
0
0
b(α ) + b(α − τ) = 4s − ∫ (f (ϕ + α ) + f (ϕ + α − τ)) sin(ϕ)dϕ = 4s − ∫ c ⋅ sin(ϕ)dϕ = 4s − 2c
.
Wegen b(α ) = b(α − π) ist dies im Fall τ = π gleich 2b(α).
Im Fall τ ∈ [0 ; π[ sei die Zerlegung α, α + τ, α + π, α + τ + π betrachtet. Da die
Pfeilrichtungen der gegenüberliegenden Parallelogramm-Seiten entgegengesetzt sind , ergibt
sich der Umfang durch Verdopplung der Beiträge von zwei Pfeilen, die zu α und α + τ
gehören. Nach Satz 2 ist dieser Beitrag
d s (α + τ, α )
d (α + τ + π, α)
d (α + π, α + τ)
d ( α , α + τ)
− s
+ s
− s
=
sin(α + τ − α ) sin(α + τ + π − α ) sin(α + π − α − τ) sin(α − α − τ)
1
⋅ (d s (α + τ, α ) + d s (α + τ + π, α ) + d s (α + π, α + τ) + d s (α, α + τ)) =
sin(τ)
1
4s − 2c
⋅ (b(α + τ) + b(α )) =
.
sin(τ)
sin(τ)
14
n −1
4) Sei nun
∑ f (ϕ − jτ) = c vorausgesetzt mit τ = mn ⋅ 2π . Der Beitrag des j-ten Pfeils zum
j= 0
Umfang ist dann nach Satz 2
d s (α + ( j + 1) ⋅ τ, α + j ⋅ τ) d s (α + ( j − 1) ⋅ τ, α + j ⋅ τ)
−
=
sin(τ)
sin(−τ)
1
(d s (α + ( j + 1) ⋅ τ, α + j ⋅ τ) + d s (α + ( j − 1) ⋅ τ, α + j ⋅ τ)) =
sin(τ)
α+ j⋅τ
α+ j⋅τ
1
∫ (s − f (ϕ)) sin(ϕ − α − ( j + 1) ⋅ τ)dϕ + ∫ (s − f (ϕ)) sin(ϕ − α − ( j − 1) ⋅ τ)dϕ
sin( τ) α+ ( j+1)⋅τ
α+ ( j−1)⋅τ
=
−τ
τ
1
(s
−
f
(
ϕ
+
α
+
(
j
+
1)
⋅
τ
))
sin(
ϕ
)d
ϕ
+
(s
−
f
(
ϕ
+
α
+
(
j
−
1)
⋅
τ
))
sin(
ϕ
)d
ϕ
∫0
sin(τ) ∫0
.
Die Summation über alle Pfeile ergibt darum
−τ
τ
n ⋅s − c
n ⋅s − c
sin(
ϕ
)d
ϕ
+
sin(
ϕ
)d
ϕ
(− cos(−τ) + 1 − cos(τ) + 1) =
∫
=
∫0
sin(τ) 0
sin(
)
τ
2ns − 2c
m
(1 − cos(τ)) = 2(ns − c) ⋅ tan ⋅ π .
sin(τ)
n
Im folgenden Satz 8 soll die Funktions-Eigenschaft in der 4. Behauptung von Satz 7 für zwei
Funktionsklassen nachgewiesen werden. Die erste Klasse verallgemeinert die
Drehpunktfunktion der Abbildungen 13, 15 und 17. Dabei wird das Intervall [0 ; 2π] in p
gleich große Teile unterteilt. Jedes dieser Teilintervalle ist in zwei Abschnitte unterteilt und f
2π
hat im ersten den Wert -1 und im zweiten den Wert 1. Der erste Abschnitt hat die Länge
qp
mit einem natürlichem q >1. (Siehe Abbildung 13 für p = 2 , q = 2, Abbildung 15 für p = 3,
q = 2 und Abbildung 17 für p = 3, q = 4.)
Satz 8:
1. p und q seien natürliche Zahl größer als 1. k sei eine natürliche Zahl, welche die
gemeinsamen Teiler von p und q mit mindestens der Vielfachheit enthält, mit der sie
in p vorkommen. Sei n = kq und m eine dazu teilerfremde Zahl mit 1 ≤ m ≤ n-1. Dann
ϕ 1
ϕ
ist f(ϕ) = 1 − 2 ⋅ floor p ⋅ +2 ⋅ floor p ⋅
−
2π
2π q
n −1
1-periodisch und es gilt
m
∑ f (ϕ − j ⋅ n ⋅ 2π) = n − 2k für alle ϕ∈ R .
j= 0
2. n, m und k seien natürliche Zahlen mit n > 1, k > 1 und 1 ≤ m ≤ n – 1 und
m
⋅ k keine natürliche Zahl. Dann ist f (ϕ) = sin(k ⋅ ϕ) 1-periodisch und
n
n −1
m
f (ϕ − j ⋅ ⋅ 2π) = 0 für alle ϕ∈ R .
∑
n
j= 0
15
1
Beweis: 1) Wegen f (ϕ + ⋅ 2π) = f (ϕ) folgt aus Satz 5, dass f 1-periodisch ist. Zum
p
Nachweis der Summen-Eigenschaft sei die Funktion
ϕ 1
ϕ
g(ϕ) = floor p ⋅ − floor p ⋅
− betrachtet. Wenn man das Intervall [0 ; 2π[ in die
2π
2π q
2π
2π
p ⋅ q gleich großen Teile [ j ⋅
; (j+1) ⋅
[ für 0 ≤ j ≤ pq – 1 unterteilt, dann ist g(ϕ) = 1
p⋅q
p⋅q
in den Teilintervallen, für die j ein Vielfaches von p ist, und sonst g(ϕ) = 0. u sei das Produkt
der gemeinsamen Teiler von p und q mit der Vielfachheit, mit der sie in p vorkommen,
p
k
v = und w = . Die Zahlen ( j ⋅ m ⋅ v ) mod q durchlaufen für 0 ≤ j ≤ q – 1 alle Zahlen von
u
u
0 bis q – 1 genau einmal, da m ⋅ v teilerfremd zu q ist. Darum ist
q −1
q −1
2π
2π
g(
ϕ
−
j
⋅
m
⋅
)
=
g(ϕ − j ⋅ m ⋅ v ⋅ ) = 1 für alle ϕ∈ R . Aus
∑
∑
uq
pq
j= 0
j= 0
1
v
f (ϕ + ⋅ 2π) = f (ϕ + ⋅ 2π) = f (ϕ) folgt
u
p
uq −1
( t +1)q −1
∑
g(ϕ − j ⋅ m ⋅
j= tq
2π
) = 1 für 0 ≤ t ≤ u – 1 und
uq
2π
2π
[ in w
p⋅q
j= 0
äquidistanten Teilwerte unterteilt, ist der Funktionswert für jeden dieser Winkel innerhalb
daraus
∑ g(ϕ − j ⋅ m ⋅ uq ) = u . Wenn man jedes Intervall [ j ⋅ p2⋅πq
; (j+1) ⋅
2π wuq −1
2π
) = wu = k .
eines Intervalls gleich. Darum ist ∑ g(ϕ − j ⋅ m ⋅ ) = ∑ g(ϕ − j ⋅ m ⋅
n
wuq
j= 0
j= 0
n −1
Wegen f (ϕ) = 1 − 2 ⋅ g(ϕ) folgt daraus die 1. Behauptung.
2) Wegen f (ϕ +
n −1
(1 − e ) ⋅ ∑ e
ikτ
1
m
⋅ 2π) = f (ϕ) ist f nach Satz 5 1-periodisch. Sei τ = ⋅ 2π . Wegen
k
n
i⋅ jkτ
= 1− e
j= 0
i⋅nkτ
= 0 und 1 − e
i⋅k ⋅τ
≠ 0 ist
n −1
∑e
i⋅ j⋅k ⋅τ
= 0 , also
j= 0
n −1
n −1
n −1
n −1
j= 0
j= 0
j= 0
j= 0
0 = ei⋅k⋅ϕ ⋅ ∑ ei⋅ j⋅k⋅τ = ∑ ei⋅k⋅( ϕ− j⋅τ ) = ∑ cos(k(ϕ − j ⋅ τ)) + i ⋅ ∑ sin(k(ϕ − j ⋅ τ)) .
Daraus folgt die zweite Behauptung.
Folgerung: Für die Funktionen der 1. Behauptung haben also nach Satz 7 alle (n, m, α)m
Tangenten-Pfeilecke einer s-Kurve den Umfang 2(n ⋅ s − n + 2k) ⋅ tan ⋅ π . Bei der
n
m
Funktion der 2. Behauptung ist der Umfang 2n ⋅ s ⋅ tan ⋅ π .
n
In Abbildung 15 wurde p = 3 und q = 2 gewählt. Es ergab sich als 1-Kurve das ReuleauxDreieck. Zur Anwendung von Satz 7 musste die Eckenzahl des Tangenten-Pfeilecks
geradzahlig sein. Für die Eckenzahl 6 (also für k = 3) und m = 1 ist der Umfang
π
12 ⋅ tan ≈ 6, 93 . Abbildung 16 illustriert die 2. Behauptung von Satz 8. Hier ist
8
16
f (ϕ) = sin(3 ⋅ ϕ) und die 1-Kurve das Steiner-Gleichdick. Jedes (5, 2, α)-Tangenten-Pfeileck
2
hat dem Umfang 10 ⋅ tan π ≈ 30, 78 .
5
Abb.15
Abb.16
.
9) Reihenentwicklung :
Im folgenden Satz 9 werden 1-periodische Drehpunktfunktionen zerlegt in solche mit
spezielleren Eigenschaften. Eine derartige Zerlegung wird in den Abbildungen 21 bis 23
dargestellt.
Satz 9: Es sei f eine 1-periodische Drehpunktfunktion und s ∈ R . Dazu seien in folgender
Weise rekursive Funktionen p n und m n definiert:
1
1
p1 (ϕ) := (f (ϕ) + f (ϕ − π)) m1 (ϕ) := (f (ϕ) − f (ϕ − π))
2
2
1
π
1
π
p n +1 (ϕ) := (p n (ϕ) + p n (ϕ − n )) m n +1 (ϕ) := (p n (ϕ) − p n (ϕ − n )) .
2
2
2
2
s
Außerdem sei s n := n .
2
Dann gilt für alle natürlichen Zahlen n:
1.
π
π
p n ϕ − n −1 = pn (ϕ) und m n ϕ − n −1 + m n (ϕ) = 0 für alle ϕ∈ R .
2
2
2.
Die Drehpunktkurve zu p n und die zugehörige sn-Kurve sind
von m n sind
π
2
n−2
-invariant.
17
π
-invariant, die
2 n −1
3. Alle Tangentenparallelogramme der sn-Kurve
τ=
Asn ,mn von m n mit dem Innenwinkel
π
8s n
.haben die gleiche Umfangslänge
n −1
2
sin(τ)
n
4. f (ϕ) = p n (ϕ) + ∑ m n (ϕ) für alle natürlichen n und ϕ∈ R . Für n → ∞
k =1
konvergiert p n (ϕ) gleichmäßig gegen eine konstante Funktion. g : ϕ → c .
n
5. Für n → ∞ konvergiert
A 0,g + ∑ Asn ,mn
k =1
gleichmäßig gegen
As,f .
Beweis:
1
( f ( ϕ − π) + f ( ϕ − 2π) ) = p1 (ϕ)
2
1
1
und aus m1 ( ϕ − π ) + m1 ( ϕ ) = ( f ( ϕ − π ) − f ( ϕ − 2π ) ) + ( f ( ϕ ) − f ( ϕ − π ) ) = 0 .
2
2
1) Die erste Eigenschaft folgt für n = 1 aus p1 ( ϕ − π ) =
Ausgehend von der Rekursionsformel erhält man durch vollständige Induktion die
Eigenschaft mit einer entsprechenden Rechnung für beliebige n.
2) Wegen p n ϕ −
wegen m n +1 (ϕ −
π
= pn (ϕ) ist die Drehpunktkurve zu p n πn −1 -invariant. Dies gilt
n −1
2
2
π
1
π
π
π
1
π
) = (p n (ϕ − n −1 ) − p n (ϕ − n −1 − n )) = (p n (ϕ) − p n (ϕ − n )) = m n +1 (ϕ)
n −1
2
2
2
2
2
2
2
auch für m n +1 .
π
+ m n (ϕ) = 0 folgt die dritte Eigenschaft aus Satz 7.
2n −1
3) Wegen m n ϕ −
4) Wegen f (ϕ) = p1 (ϕ) + m1 (ϕ) gilt die Formel für n = 1. Für beliebige n ergibt sie sich
durch vollständige Induktion aus der Gleichung
n
n
n +1
k =1
k =1
k =1
f (ϕ) = p n (ϕ) + ∑ m n (ϕ) = p n +1 (ϕ) + m n +1 (ϕ) + ∑ m n (ϕ) = p n +1 (ϕ) + ∑ m n (ϕ) .
f hat nach Voraussetzung im Intervall [0 ; 2π] eine beschränkte Totalvariation v. Es soll
zunächst gezeigt werden, dass dann p1 keine größere Totalvariation hat. Es sei
0 = ϕ0 < ϕ1 < ... < ϕn −1 < ϕn = 2π eine Zerlegung des Intervalls [0 ; 2π] . Nach der Dreiecksn
1 n
∑ f (ϕν ) − f (ϕν−1 ) + f (ϕν − π) − f (ϕν−1 − π)
2 ν=1
ν=1
1 n
1 n
1
1
≤ ∑ f (ϕν ) − f (ϕν−1 ) + ∑ f (ϕν − π) − f (ϕν−1 − π) ≤ v + v = v . Darum ist die
2 ν=1
2 ν=1
2
2
Totalvariation von p1 höchstens gleich v. Entsprechend zeigt man, dass für alle natürlichen n
Ungleichung gilt:
∑ p (ϕ ) − p (ϕ
1
ν
1
ν−1
)=
die Totalvariation von p n kleinergleich v ist. Wegen der Periodizität von p n ist die
v
2π
Totalvariation von p n im Intervall 0 ; n also höchstens gleich n . Für die Differenz d n
2
2
zwischen dem Supremum sup n des Wertebereichs von p n und dem Infimum inf n gilt dann
18
v
. Da d n also eine Nullfolge bildet, und die Folge n → [sup n ; inf n ] eine
2n
Intervallschachtelung darstellt, konvergiert p n gleichmäßig gegen eine konstante Funktion
g: ϕ→c.
dn ≤
n
1
1
s
=
s
⋅
+
5) Aus der Formel unter 4) und aus der Gleichung
2n ∑ 2k
k =1
n
=
s
+
n ∑ s k folgt
k =1
n
As,f (α) = Asn ,pn (α) + ∑ Asn ,mn (α) .
k =1
p n konvergiert gleichmäßig gegen die konstante
α
Funktion g. Darum konvergiert A sn ,pn (α) = i ⋅ ∫ (s n − p n (ϕ))eiϕdϕ + s n gleichmäßig gegen die
0
α
Kreisfunktion A 0,g (α) = −i ⋅ ∫ ceiϕdϕ = −ceiα + c . Daraus folgt die 5.Eigenschaft.
0
Bemerkungen zu Satz 9:
• Jede s-Kurve einer 1-periodischen Drehpunktfunktion ist also Grenzwert einer Reihe
von Kurven, die Tangentenparallelogramme mit konstanter Umfangslänge haben.
• Statt sukzessive zu halbieren, hätte man in Satz 9 auch durch eine natürliche Zahl
größer als 2 teilen können. Diese Möglichkeit wird in Satz 12 wieder aufgegriffen.
π
• Statt bei der 3. Eigenschaft den Winkel τ = n −1 zu betrachten, hätte man für n > 2
2
π
π
z.B. auch den Winkel τ = − n −1 nehmen können, der für große n nahezu ein rechter
2 2
Winkel ist.
8) konvexe Kurven:
Abb. 17
Abb.18
19
Die Abbildungen 17 und 18 zeigen Drehpunktkurven und s-Kurven (s = 1 und s = 2,1) zu 1periodischen Drehpunktfunktionen. In Abbildung 17 ist die Drehpunktfunktion f periodisch
mit der Periode 120°. Dabei ist f (ϕ) = −1 für ϕ zwischen 0° und 30° und f (ϕ) = 1 für ϕ
zwischen 30° und 120°. Bei den beiden roten s-Kurven haben wie bei den Abbildungen 13
und 15 alle umschließenden Rechtecke die gleiche Umfangslänge. Bei Abbildung 18 wurde
ϕ
die Funktion ϕ → (ϕ − π) 2 , ϕ∈ [0 ; 2π] periodisch zu ϕ → (ϕ − 2π ⋅ floor − π)2 , ϕ ∈ R
2π
auf ganz R fortgesetzt und dann Satz 4 angewandt. Es ergibt sich
ϕ
f (ϕ) = (ϕ − 2π ⋅ floor − π)2 − 4 cos(ϕ), ϕ∈ R .
2π
Anders als die s-Kurven in Abbildung 9, 10 oder 12 haben die in Abbildung 17 die
Eigenschaft, dass kein Kurvenpunkt auf der rechten Seite einer Stützgeraden liegt. Der Grund
dafür liegt darin, dass f 1-periodisch ist und s obere Schranke von f. In Abbildung 18 sind die
beiden s-Werte untere Schranken. Darum liegt kein Kurvenpunkt auf der linken Seite einer
Stützgeraden. Diese Schranken-Eigenschaft hat zur Folge, dass die s-Kurven in den
Abbildungen 17 und 18 konvexe Mengen einschließen.
Definition : Eine Menge heißt konvex, wenn sie mit zwei Punkten stets die ganze
Verbindungsstrecke enthält. Unter der konvexen Hülle einer Menge M wird die kleinste
konvexe Menge verstanden, die M als Teilmenge enthält.
Definition : Unter der Breite b(α) einer beschränkten Punktmenge M in Richtung α versteht
man den Abstand zweier paralleler Geraden in Richtung α+90° oder α−90°, zwischen denen
M liegt und die möglichst nahe beieinander liegen.
Satz 10 : f sei eine 1-periodische Drehpunktfunktion und s obere (bzw. untere) Schranke von
f. Dann gilt:
1. Für alle α ∈ R und Punkte P der konvexen Hülle der Punktmenge von A s,f ist der
signierte Abstand des Punktes P von der Stützgeraden g s,f (α ) größergleich (bzw.
kleinergleich) Null.
2. Die Punktmenge von A s,f ist Teilmenge des Rands der konvexen Hülle dieser
Punktmenge.
3. Die Breite der konvexen Hülle der Punktmenge von A s,f in Richtung α ist
π
b(α) = 2s − ∫ f (ϕ + α ) sin(ϕ)dϕ .
0
Beweis: 1) Nach Satz 2 ist für alle α, β ∈ R der signierte Abstand des Punktes A s,f (β) von
der Stützgeraden g s,f (α ) größergleich (bzw. kleinergleich) Null. Die erste Eigenschaft folgt
darum daraus, dass keine Verbindungsstrecke zweier dieser Punkte die Stützgerade trifft.
2) Jeder Punkt A s,f (α) gehört zur konvexen Hülle und enthält in jeder ε-Umgebung sowohl
Punkte mit positivem als auch Punkte mit negativem signierten Abstand von g s,f (α ) . Darum
ist A s,f (α) Randpunkt der konvexen Hülle.
3) Aus 1) folgt, dass die konvexe Hülle ganz zwischen den Stützgeraden g s,f (α ) und
g s,f (α + π) liegt. Darum folgt 3) aus Satz 7.
20
Definition: Die konvexe Hülle der s-Kurve zu einer 1-periodischen Drehpunktfunktion f mit s
als oberer Schranke sei mit K(s; f) bezeichnet.
K und L seien Punktmengen und λ eine positive Zahl. Dann wird definiert:
λ ⋅ K = {λ ⋅ P P ∈ K } und K + L = {P + Q P ∈ K und Q ∈ L} . Diese Addition wird als
Minkowski-Addition bezeichnet.
Abb. 19
Abb.20
Die Abbildungen 19 und 20 veranschaulichen die Minkowski-Adddition. Abbildung 19 zeigt,
dass für die Drehpunktfunktion f von Abbildung 17 K(2,1;f) durch Addition von K(1;f) und
einem Kreis vom Radius 1,1 entsteht. Hier wurde um die Punkte der roten 1-Kurve hellgrüne
Kreise mit dem Radius 1,1 gezeichnet, deren Hüllkurve die 2,1-Kurve ist.. Die rote Kurve in
Abbildung 20 ist die 1-Kurve der Drehpunktfunktion f: ϕ → sin(3ϕ) , die schon in den
Abbildungen 7 und 16 benutzt wurde. Nach Satz 7 hat sie konstante Breite. Die dunkelgrüne
Kurve ist ein Punktspiegelungs-Bild dieser 1-Kurve. Die hellgrünen Kurven entstehen durch
Verschiebung der dunkelgrünen Kurve, so dass das Zentrum auf der roten Kurve liegt. Es
ergibt sich als Hüllkurve ein Kreis. Dies bedeutet, dass die Minkowski-Summe von K(1;f)
und einem Punktspiegelungs-Bild davon einen Kreis ergibt (siehe auch Satz 12).
Satz 11: f bzw. g seien 1-periodische Drehpunktfunktionen und s bzw. t obere Schranken
davon. λ sei eine positive Zahl. Dann gilt:
1. λK(s;f) = K(λs;λf)
2. K(s + t ; f + g) = K(s;f) + K(t;g).
α
∫
iϕ
Beweis: Die erste Aussage folgt aus λ ⋅ A s,f (α ) = i (λ ⋅ s − λ ⋅ f (ϕ))e dϕ + λ ⋅ s .
0
K(s + t ; f + g) ist die konvexe Hülle von der Menge der Punkte
α
A s + t,f +g (α) = i ⋅ ∫ (s + t − f (ϕ) − g(ϕ))eiϕdϕ + s + t =
0
α
α
0
0
i ⋅ ∫ (s − f (ϕ))eiϕdϕ + s + i ⋅ ∫ (t − g(ϕ))eiϕdϕ + t = As,f (α) + A t,g (α) . Darum ist
K(s + t ; f + g) Teilmenge von K(s;f) + K(t;g).
21
Zum Beweis, dass auch K(s;f) + K(t;g) Teilmenge von K(s + t ; f + g) ist, sei angenommen,
dass es einen Punkt P = As,f (β) + A t ,g ( γ ) gibt, der nicht Element von K(s + t ; f + g) ist. Dann
gibt es eine Stützgerade g von A s + t ,f + g bei einem Winkel α, so dass P von g einen negativen
signierten Abstand hat. Dieser Abstand ist der Realteil von
α
(As + t,f + g (α) − P)e
− iα
∫
= i ⋅ (s − f (ϕ))e
i( ϕ−α )
β
α
dϕ + i ⋅ ∫ (t − g(ϕ))ei( ϕ−α ) dϕ , also
γ
α
α
β
γ
− ∫ (s − f (ϕ))sin(ϕ − α)dϕ − ∫ (t − g(ϕ)) sin(ϕ − α)dϕ . Dies ist aber keine negative
Zahl im Widerspruch zur Voraussetzung. Da also alle Punkte der Form A s,f (β) + A t ,g ( γ ) in
K(s + t ; f + g) liegen, ist auch K(s;f) + K(t;g) Teilmenge von K(s + t ; f + g).
9) konstante Breitensummen:
2π
. M sei eine beschränkte Menge. Dann hat M
n
konstante n-Breitensumme, wenn die Summe der Breiten in den Richtungen α + jτ mit
ganzzahligem j zwischen 0 und n-1 für alle Winkel α gleich ist.
Definition: n sei eine natürliche Zahl und τ =
n −1
Für die Punktmenge K(s,f) ist die n-Breitensumme durch
∑ b ( ϕ − jτ ) gegeben.
j= 0
Da die Breiten in den Richtungen α und α + 180° stets gleich sind, bedeutet eine konstante
2-Breitensumme, dass die Breite selbst konstant ist. Bei einer Menge mit konstanter
4-Breitensumme haben alle umschließenden Rechtecke die gleiche Umfangslänge, nämlich
diese Breitensumme.
Abb. 21
22
Abb. 22
Abb.23
In der Abbildung 21 entstand die Drehpunktfunktion aus der Funktion ϕ → ϕ − π durch
Anwendung von Satz 4 und periodischer Fortsetzung. Es ergab sich der Funktionsterm
ϕ
ϕ → ϕ − 2π ⋅ floor − π + 2sin(ϕ) . Die Abbildungen 22 und 23 zeigen die in dem
2π
folgenden Satz 12 genannten Funktionen m und p für n = 2 zusammen mit den 0,5π-Kurven.
Die 0,5π-Kurve in Abbildung 22 hat konstante Breite, die in Abbildung 23 ist
punktsymmetrisch. Die Minkowski-Summe dieser beiden Kurven ergibt in Abbildung 21 die
π-Kurve.
2π
Satz 12: f sei eine 1-periodische Drehpunktfunktion, n eine natürliche Zahl ≥ 2 und τ =
.
n
1 n −1
Sei p1 (ϕ) = ∑ f (ϕ − kτ) und m1 (ϕ) = f (ϕ) − p1 (ϕ) . s sei obere Schranke von p1 und
n k =0
t obere Schranke von m1. Dann gilt:
1.
f (ϕ) = p1 (ϕ) + m1 (ϕ)
n −1
2. p hat die Periode τ und für m1 gilt
∑ m (ϕ − jτ) = 0 .
j= 0
1
3. K(s+t,f) = K(s,p1) + K(t,m1)
4. K(s,p1) ist τ-invariant und K(t,m1) hat konstante n-Breitensumme 2sn.
5. Wenn man K(t,m1) um die Winkel jτ mit 0 ≤ j ≤ n − 1 dreht und von allen diesen
Drehungs-Bildern die Minkowski-Summe bildet, dann ergibt sich ein Kreis mit dem
Radius ns.
Beweis:
Die Eigenschaften 1 ist offenbar erfüllt. Die zweite Eigenschaft ergibt sich daraus dass für alle
natürlichen j gilt : p1 (ϕ − jτ) = p1 (ϕ) . Die dritte Eigenschaft folgt aus Satz 11. In der vierten
folgt die Aussage über p1 aus Satz 6, die über m1 nach Satz 7 aus
n −1
π n −1
j= 0
0 j= 0
∑ b(α − jτ) = 2s ⋅ n − ∫ ∑ m (ϕ + α − jτ) sin(ϕ)dϕ = 2s ⋅ n .
1
Die fünfte Eigenschaft folgt mit der zweiten Eigenschaft aus Satz 6, da die s-Kurven zur
Drehpunktfunktion ϕ → 0 Kreise sind.
23