Lineare Algebra und Analysis für Funktionen einer Variablen
Werbung

Fakultät Mathematik Institut für Numerische Mathematik
LINEARE ALGEBRA UND
ANALYSIS FÜR FUNKTIONEN
EINER VARIABLEN
1. Vektorrechnung und Geometrie
Prof. Dr. Gunar Matthies
Wintersemester 2017/18
Mengenbegriff
Definition (Naiver Mengenbegriff nach Georg Cantor)
Eine Menge ist eine Zusammenfassung von wohlbestimmten, wohlunterscheidbaren Objekten unserer Anschauung oder unseres Denkens zu einem Ganzen. Die Objekte der Menge werden Elemente
der Menge genannt.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
2/54
Häufig auftretende Mengen
N = Menge der natürlichen Zahlen
N0 = N ∪ {0} = Menge der natürlichen Zahlen und 0
Z = Menge der ganzen Zahlen
Q = Menge der rationalen Zahlen (=Brüche)
R = Menge der reellen Zahlen
R+ = Menge der positiven reellen Zahlen
R+
0 = Menge der nichtnegativen reellen Zahlen
R− = Menge der negativen Zahlen
R−
0 = Menge der nichtpositiven Zahlen
Zusammenhang
N ⊂ N0 ⊂ Z ⊂ Q ⊂ R
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
3/54
Intervalle und Halbgeraden
Seien a, b ∈ R mit a ≤ b. Dann setzen wir
• Intervalle
[a, b] := {x ∈ R : a ≤ x
(a, b) := {x ∈ R : a < x
[a, b) := {x ∈ R : a ≤ x
(a, b] := {x ∈ R : a < x
≤ b}
(abgeschlossen)
< b}
(offen)
< b}
(rechts halboffen)
≤ b}
(links halboffen)
• Halbgeraden oder Strahlen
[a, ∞) := {x ∈ R : a ≤ x}
(−∞, b] := {x ∈ R : x ≤ b}
(a, ∞) := {x ∈ R : a < x}
(−∞, b) := {x ∈ R : x < b}
(abgeschlossene Halbgerade)
(abgeschlossene Halbgerade)
(offene Halbgerade)
(offene Halbgerade)
andere Schreibweise:
(a, b) =]a, b[
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
4/54
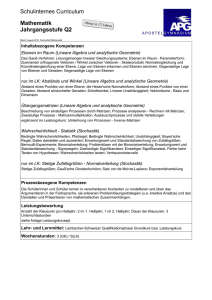
Kartesisches Koordinatensystem
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
5/54
Punkte und Vektoren I
Zu je zwei verschiedenen Punkten P und Q des Raumes gibt es
genau eine Parallelverschiebung des Raumes, die P auf Q abbildet.
# »
Diese Parallelverschiebung wird mit dem Pfeil PQ bezeichnet. Der
# »
Pfeil PQ mit
P = (px , py , pz ),
Q = (qx , qy , qz )
legt mittels
qx − px
vx
#»
v = vy := qy − py
qz − pz
vz
einen Vektor #»
v fest. Der Vektorpfeil wird später auch weggelassen.
# »
Der Pfeil PQ stellt eine Realisierung des Vektors #»
v dar.
Zwei gleich lange und gleich gerichtetete Pfeile stellen den gleichen
Vektor dar.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
6/54
Punkte und Vektoren II
Ein spezieller Vektor ist der Nullvektor
0
#»
0 = 0 .
0
Er entspricht der Nichtverschiebung des Raumes.
Der zu #»
v gleich lange, aber entgegengesetzte Vektor wird mit − #»
v
#»
bezeichnet. Er macht die durch v bewirkte Verschiebung wieder
rückgängig.
vx
−vx
Für jeden Vektor #»
v = vy ist − #»
v = −vy
vz
−vz
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
7/54
Punkte und Vektoren III
Definition
Die Menge aller Vektoren des dreidimensionalen Raumes bezeichnen wir mit R3 . Die Menge aller Vektoren der Ebene bezeichnen
wir mit R2 .
Bemerkung
Vektoren des Raumes besitzen 3 Komponenten, Vektoren in der
Ebene haben 2 Komponenten.
Die Vektoren der Ebene R2 können als Vektoren des Raums R3
aufgefasst werden, indem die dritte Komponente auf 0 gesetzt
wird.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
8/54
Ortsvektoren und geometrische Grundbegriffe
Definition
# »
Die Pfeile OP mit dem Koordinatenursprung O heißen Ortspfeile
# »
oder Ortsvektoren. Der durch OP dargestellte Vektor #»
r hat als
Komponenten die Koordinaten von P.
P = (px , py , pz )
←→
px
#
»
#»
r = OP = py
pz
Definition
• Zwei Vektoren #»
u und #»
v heißen kollinear, wenn sie, jeweils im
Koordinatenursprung O angetragen, auf einer Geraden liegen.
#» heißen komplanar, wenn sie, jeweils im
• Drei Vektoren #»
u , #»
v,w
Koordinatenursprung O angetragen, in einer Ebene liegen.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
9/54
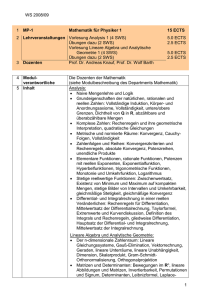
Summe, Differenz und Skalarmultiplikation
Definition
ux
vx
Seien #»
u = uy , #»
v = vy zwei Vektoren des R3 und λ ∈ R.
uz
vz
Dann definieren wir
durch
ux − vx
ux + vx
#»
#»
u − #»
v := uy − vy
u + #»
v := uy + vy ,
uz + vz
uz − vz
die Summe und die Differenz. Das
Vielfache ist durch
skalare
λux
λ #»
u := λuy
λuz
#»
erklärt. Insbesondere gilt: (−1) u = − #»
u.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
10/54
Geometrische Interpretation
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
11/54
Rechenregeln für Vektoraddition und Skalarmultiplikation
#» ∈ R3 und alle λ, µ ∈ R gelten
Für alle #»
u , #»
v,w
#» = #»
#»)
1. ( #»
u + #»
v)+w
u + ( #»
v +w
(Assoziativgesetz)
2. #»
u + #»
v = #»
v + #»
u
(Kommutativgesetz)
3. Zu jedem Paar #»
u , #»
v ∈ R3 gibt es genau einen Vektor #»
z ∈ R3
mit #»
u + #»
z = #»
v , nämlich #»
z = #»
v − #»
u.
4. (λµ) #»
u = λ(µ #»
u)
(skalares Assoziativgesetz)
5. λ( #»
u + #»
v ) = λ #»
u + λ #»
v
(Distributivgesetz)
6. (λ + µ) #»
u = λ #»
u + µ #»
u
(Distributivgesetz)
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
12/54
Länge oder Betrag eines Vektors
| #»
v | :=
G. Matthies
q
vx2 + vy2 + vz2
Lineare Algebra und Analysis für Funktionen einer Variablen
13/54
Rechenregeln für Beträge von Vektoren
Für alle #»
u , #»
v ∈ R3 und alle λ ∈ R gelten:
1. |λ #»
u | = |λ| | #»
u|
0
#»
#»
2. | u | = 0 ⇔ u = 0
0
3. | #»
u + #»
v | ≤ | #»
u | + | #»
v|
G. Matthies
(Dreiecksungleichung)
Lineare Algebra und Analysis für Funktionen einer Variablen
14/54
Einheitsvektoren
Definition
Einen Vektor #»
e ∈ R3 mit | #»
e | = 1 nennen wir Einheitsvektor.
#»
Sei #»
v ∈ R3 \ { 0 } ein beliebiger vom Nullvektor verschiedener
Vektor. Dann ist
1 #»
#»
e #»
v := #» v
|v |
der in Richtung #»
v weisende Einheitsvektor.
#»
Jeder Vektor #»
v ∈ R3 \ { 0 } lässt sich durch seine Länge | #»
v | und
seine Richtung #»
e #»
gemäß
v
#»
v = | #»
v | #»
e #»
v
darstellen.
#»
Dem Nullvektor 0 kann keine Richtung zugeordnet werden.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
15/54
Koordinateneinheitsvektoren
Koordinateneinheitsvektoren
im dreidimensionalen
Raum R3
1
0
0
#»
#»
#»
e#»x = e#»1 = i = 0 , e#»y = e#»2 = j = 1 , e#»z = e#»3 = k = 0
0
0
1
Darstellung von Vektoren
ux
#»
⇔
u = uy
uz
⇔
⇔
G. Matthies
#»
u = ux e#»x + uy e#»y + uz e#»z
#»
u = ux e#»1 + uy e#»2 + uz e#»3
#»
#»
#»
#»
u = ux i + uy j + uz k
Lineare Algebra und Analysis für Funktionen einer Variablen
16/54
Winkel zwischen Vektoren I
Definition
Trägt man in einem Punkt P zwei vom Nullvektor verschiedene
Vektoren #»
u und #»
v an, so nennt man den kleineren der beiden positiv gemessenen Winkel, die die Pfeile #»
u und #»
v im Scheitel P bil#»
#»
den, den Winkel zwischen u und v . Kurz schreiben wir ^( #»
u , #»
v ).
Definition
u und #»
v heißen orthogonal oder senkrecht, wenn
Zwei Vektoren #»
#»
#»
^( u , v ) = π/2 gilt. Aus praktischen Überlegungen legen wir zusätzlich fest, dass der Nullvektor orthogonal zu jedem beliebigen
Vektor #»
u ∈ R3 ist.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
17/54
Winkel zwischen Vektoren II
Kosinussatz
#» #»2 #»2 #»2
#»
v − u = u + v − 2 #»
u v cos(ϕ)
ergibt umgestellt
3
X
#»
ui vi = #»
u v cos(ϕ)
i=1
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
18/54
Skalarprodukt
Definition
Seien #»
u , #»
v ∈ R3 Vektoren. Dann nennen wir
3
X
#»
u · #»
v :=
ui vi
i=1
Skalarprodukt (oder inneres Produkt) der Vektoren #»
u und #»
v.
Das Skalarprodukt zweier Vektoren ist eine Zahl (ein Skalar).
Bemerkung
In einigen Büchern wird statt #»
u · #»
v nur #»
u #»
v geschrieben, was aber
ungenau ist und zu Missverständnissen führen kann.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
19/54
Rechenregeln für Skalarprodukte
#» ∈ R3 und λ ∈ R gelten:
Für #»
u , #»
v,w
1. #»
u · #»
v = #»
v · #»
u
#» = #»
#» +
2. ( #»
u + #»
v)·w
u ·w
3. λ( #»
u · #»
v ) = (λ #»
u ) · #»
v =
4. #»
u · #»
u = | #»
u |2
#»
#»
v ·w
#»
u · (λ #»
v)
Aus 1. und 2. folgt
#» + #»
#» + #»
#» + #»
( #»
u + #»
v ) · (w
z ) = #»
u ·w
u · #»
z + #»
v ·w
v · #»
z
#»
#»
#»
#»
3
für alle u , v , w , z ∈ R
#» ∈ R3
Im Allgemeinen gilt für Vektoren #»
u , #»
v,w
#» 6= #»
#»).
( #»
u · #»
v )w
u ( #»
v ·w
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
20/54
Eigenschaften des Skalarprodukts I
#»
Nach Herleitung gilt für beliebige Vektoren #»
u , #»
v ∈ R3 \ { 0 }
#»
u · #»
v
cos(ϕ) = #» #» ,
|u ||v |
wenn ϕ = ^( #»
u , #»
v ) der Winkel zwischen #»
u und #»
v ist.
Folgerung
#»
Für #»
u , #»
v ∈ R3 \ { 0 } gelten
• #»
u · #»
v > 0, falls ϕ ∈ [0, π/2),
• #»
u · #»
v = 0, falls ϕ = π/2,
• #»
u · #»
v < 0, falls ϕ ∈ (π/2, π],
wobei ϕ = ^( #»
u , #»
v ) ist.
Ist mindestens einer der beiden Vektoren #»
u und #»
v gleich dem
#»
Nullvektor 0 , dann kann kein Winkel ϕ definiert werden.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
21/54
Eigenschaften des Skalarprodukts II
Folgerung
Die Vektoren #»
u und #»
v stehen genau dann senkrecht aufeinander,
#»
#»
wenn u · v = 0 gilt.
Für die Koordinateneinheitsvektoren gelten
e#» · e#» = e#» · e#» = e#» · e#» = 1
x
und
x
y
y
z
z
e#»x · e#»y = e#»y · e#»z = e#»z · e#»x = 0.
Cauchy-Schwarz-Ungleichung
#» #» #» #»
u · v ≤ u v für alle #»
u , #»
v ∈ R3
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
22/54
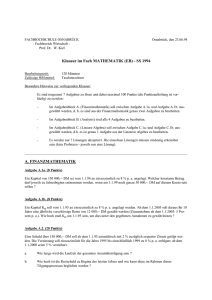
Geometrische Interpretation
#»
u · #»
v = | #»
u | | #»
v | cos(ϕ)
#»
#»
= |u ||p|
#»
u · #»
v = | #»
u | | #»
v | cos(ϕ)
#»
= −| u | | #»
v | cos(π − ϕ)
= −| #»
u | | #»
p|
Der Vektor #»
p ist die orthogonale Projektion des Vektors #»
v auf
#»
den Vektor u . Unter Beachtung der Orientierung (Vorzeichen!)
lässt sich das Skalarprodukt #»
u · #»
v aus dem Produkt der Beträge
#»
#»
von u und p berechnen.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
23/54
Unmöglichkeit der Umkehrung des Skalarprodukts
Es gibt keine Umkehrung des Skalarprodukts, d. h., es ist nicht
möglich, aus der Kenntnis des Vektors #»
u und des Skalarproduktes
#»
u · #»
v auf einen eindeutigen Vektor #»
v zu schließen.
#»
#»
u · #»
v = | #»
u | | #»
p | = #»
u ·w
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
24/54
Richtungskosinus
Sei #»
e ∈ R3 ein Einheitsvektor, d. h. | #»
e | = 1.
Ist #»
v ein Einheitsvektor, dann gilt
cos(α) = vx , cos(β) = vy ,
G. Matthies
cos(γ) = vz .
Lineare Algebra und Analysis für Funktionen einer Variablen
25/54
Rechtssystem
Definition
#») von Vektoren #»
#» ∈ R3 wird RechtsDas Tripel ( #»
u , #»
v,w
u , #»
v,w
#»
#» in dieser
system genannt, wenn sich die Vektoren u , #»
v und w
Reihenfolge dem Daumen, dem Zeigefinger und dem Mittelfinger
der rechten Hand zu ordnen lassen, also der Rechte-Hand-Regel
genügen.
Bemerkung
Das Vektorentripel (e#»x , e#»y , e#»z ) bildet ein Rechtssystem.
Das Vektorentripel (e#»x , e#»z , e#»y ) bildet kein Rechtssystem.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
26/54
Vektorprodukt
Definition
#»
Seien #»
u , #»
v ∈ R3 zwei vom Nullvektor 0 verschiedene, nicht kollineare Vektoren. Dann ist das Vektorprodukt (oder Kreuzprodukt
oder äußeres Produkt) #»
u × #»
v der Vektor des R3 , der
1. zu #»
u und #»
v orthogonal ist,
2. einen Betrag besitzt, der dem Flächeninhalt des von #»
u und
#»
v aufgespannten Parallelogramms entspricht,
3. das Tripel ( #»
u , #»
v , #»
u × #»
v ) zum Rechtssystem macht.
#»
#»
#»
#»
Ist u = 0 oder v = 0 oder sind #»
u und #»
v Vielfache voneinander,
#»
#»
#»
dann wird u × v = 0 gesetzt.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
27/54
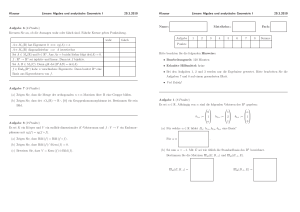
Geometrische Interpretation
Es gilt:
G. Matthies
#»
F = #»
u × #»
v = #»
u v sin(ϕ)
Lineare Algebra und Analysis für Funktionen einer Variablen
28/54
Rechenregeln für Vektorprodukte I
#» ∈ R3 und alle λ ∈ R gelten:
Für alle #»
u , #»
v,w
1. #»
u × #»
v = − #»
v × #»
u
(Antikommutativität)
#») = #»
#»
2. #»
u × ( #»
v +w
u × #»
v + #»
u ×w
(Distributivität)
3. λ( #»
u × #»
v ) = (λ #»
u ) × #»
v = #»
u × (λ #»
v)
#»
#» #» #»
#»
4. #»
u × #»
u = 0 , #»
u × 0 = 0 , 0 × #»
u = 0
5. | #»
u × #»
v |2 = | #»
u |2 | #»
v |2 − ( #»
u · #»
v )2
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
29/54
Rechenregeln für Vektorprodukte II
Folgerung
#», #»
Für Vektoren #»
u , #»
v,w
z ∈ R3 gelten
#» = #»
#» + #»
#»
• ( #»
u + #»
v)×w
u ×w
v ×w
#» + #»
#» + #»
#» + #»
• ( #»
u + #»
v ) × (w
z ) = #»
u ×w
u × #»
z + #»
v ×w
v × #»
z
Bemerkung
Im Allgemeinen gilt
#»
#») 6= ( #»
#».
u × ( #»
v ×w
u × #»
v)×w
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
30/54
Berechnung des Vektorprodukts
Geometrische Überlegungen liefern für die Koordinateneinheitsvektoren
e#»x × e#»y = e#»z ,
e#» × e#» = −e#»,
y
x
z
e#»y × e#»z = e#»x ,
e#» × e#» = −e#»,
z
y
x
e#»z × e#»x = e#»y ,
e#» × e#» = −e#»
x
z
y
Unter Ausnutzung der Rechenregeln erhalten wir für
ux
vx
#»
#»
u = uy ,
v = vy
uz
vz
die Darstellung
uy vz − uz vy
#»
u × #»
v = uz vx − ux vz .
ux vy − uy vx
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
31/54
Regel von Sarrus
uy vz − uz vy
#»
u × #»
v = uz vx − ux vz
ux vy − uy vx
= (uy vz −uz vy )e#»x + (uz vx −ux vz )e#»y + (ux vy −uy vx )e#»z
Produkte entlang der roten Linien mit positvem Vorzeichen und
Produkte entlang der blauen Linien mit negativem Vorzeichen versehen und aufaddieren.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
32/54
Spatprodukt
Definition
#» ∈ R3 ist durch
Für je drei Vektoren #»
u , #»
v,w
#»] := ( #»
#»
[ #»
u , #»
v,w
u × #»
v)·w
das Spatprodukt definiert.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
33/54
Eigenschaften des Spatprodukts
#»
#»
• Für die Koordinateneinheitsvektoren e#»
x , ey und ez stellt der
Spat einen Würfel mit Kantenlänge 1 dar. Es gilt
[e#», e#», e#»] = (e#» × e#») · e#» = e#» · e#» = 1.
x
y
z
x
y
z
z
z
• Da ( #»
u × #»
v ) zu #»
u und #»
v orthogonal ist, gilt
[ #»
u , #»
v , #»
u ] = ( #»
u × #»
v )· #»
u = 0, [ #»
u , #»
v , #»
v ] = ( #»
u × #»
v )· #»
v = 0.
#»
#»
#»
3
• Für beliebige Vektoren u , v , w ∈ R gelten
#»] = [ #»
#», #»
#», #»
[ #»
u , #»
v,w
v,w
u ] = [w
u , #»
v ] (zyklisches Vertauschen)
und
• VSpat
G. Matthies
#»] = −[ #»
#», #»
[ #»
u , #»
v,w
u,w
v ].
#» #» #» 1
#»]
= [ u , v , w ], VTetraeder = [ #»
u , #»
v,w
6
Lineare Algebra und Analysis für Funktionen einer Variablen
34/54
Geraden im Raum I
Gegeben seien ein Punkt P0 = (ax , ay , az ) mit zugehörigem Orts# »
vektor r#»0 = OP0 und ein Vektor
sx
#»
s = sy .
sz
Wir betrachten die Gerade durch P0 in Richtung #»
s . Wenn P ein
beliebiger Punkt auf der Gerade ist, dann gilt für den zugehörigen
# »
Ortsvektor #»
r = OP, dass es einen reellen Parameter λ derart gibt,
dass
#»
r = r#»0 + λ #»
s
#»
gilt. Wir nennen r0 den Aufpunkt und #»
s die Richtung bzw. den
Richtungsvektor der Geraden. Diese Geradendarstellung wird als
Punkt-Richtungsform bezeichnet.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
35/54
Geraden im Raum II
Gegeben seien zwei verschiedene Punkte P0 und P1 einer Geraden.
Dann lässt sich die Richtung bzw. der Richtungsvektor der Geraden
# »
durch P0 P1 festlegen.
# »
Wird mit r#»0 = OP0 wieder der Ortsvektor von P0 bezeichnet, dann
gilt für einen beliebigen Punkt P der Geraden mit zugehörigem
Ortsvektor #»
r die Beziehung
# »
#»
r = r#» + λP P
0
0 1
mit dem reellen Parameter λ.
Dies ist die Zwei-Punkte-Form der Geradengleichung.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
36/54
Geradengleichung
# »
# »
g : #»
r = r#»0 + λ #»
s = OP0 + λP0 P1 ,
λ∈R
Eine Veränderung des Aufpunktes bewirkt eine Parallelverschiebung der Geraden. Ändert sich die Richtung, so wird die Gerade
gedreht, wobei P0 bzw. r#»0 fest bleibt.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
37/54
Lot auf eine Gerade I
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
38/54
Lot auf eine Gerade II
Gegeben: Punkt P1 , Gerade g
Gesucht: Fußpunkt P ∗ des Lots von P1 auf g
Lösung:
# » ∗
#»∗
• P1 hat Ortsvektor r#»
1 = OP1 , P den Ortsvektor r
# »
• #»
r = r#»0 + λ #»
s , λ ∈ R mit Richtungsvektor #»
s und r#»0 = OP0
# »
• für kürzesten Abstand: P ∗ P1 senkrecht zu #»
s
# ∗ » #»
#»
#»
∗
⇒ 0 = (P P1 ) · s = (r1 − r ) · #»
s
• da P ∗ auf g : es gibt Parameter λ∗ mit
# »
#»
r ∗ = OP ∗ = r#»0 + λ∗ #»
s
#»
#»
#»
#»
#»
#»
∗
∗ #» #»
• Einsetzen: 0 = ( r1 − ( r0 + λ s )) · s = ( r1 − r#»
0) · s − λ s · s
(r#»1 − r#»0 ) · #»
s
• Umstellen und #»
s · #»
s = | #»
s |2 nutzen: λ∗ =
| #»
s |2
• #»
r ∗ durch Einsetzen von λ∗ bestimmen
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
39/54
Abstand zu einer Geraden I
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
40/54
Abstand zu einer Geraden II
Darstellung der Fläche F des Parallelogramms
• Betrag des Vektorprodukts
# »
F = P0 P1 × #»
s
• Produkt aus der Höhe d und der Länge der Grundseite #»
s
F = d | #»
s|
Gleichsetzen liefert
was zu
# »
d | #»
s | = P0 P1 × #»
s ,
# »
s
P0 P1 × #»
|(r#»1 − r#»0 ) × #»
s|
d=
=
#»
#»
|s |
|s |
führt.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
41/54
Lage von Geraden zueinander
Gegeben: Gerade g1 : #»
r = r#»1 + λs#»1 , λ ∈ R,
#»
Gerade g2 : r = r#»2 + µs#»2 , µ ∈ R
Gesucht: gegenseitige Lage der beiden Geraden
mögliche Fälle:
• s#»1 und s#»2 sind kollinear:
* r#»1 ∈ g2 ⇔ g1 und g2 sind identisch
* r#»1 6∈ g2 ⇔ g1 und g2 sind parallel, aber nicht identisch
• s#» und s#» sind nicht kollinear:
1
2
* Die Geraden g1 und g2 schneiden sich.
⇔ Es gibt Parameter λ, µ ∈ R mit
r#»1 + λs#»1 = r#»2 + µs#»2 .
* Die Geraden g1 und g2 sind zueinander windschief.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
42/54
Abstand zweier Geraden
Gegeben: Gerade g1 : #»
r = r#»1 + λs#»1 , λ ∈ R,
#»
Gerade g2 : r = r#»2 + µs#»2 , µ ∈ R
Gesucht: Abstand der beiden Geraden
Lösung:
• s#»1 und s#»2 sind kollinear
* r#» ∈ g
1
2
⇒ Abstand ist 0
* r#»1 6∈ g2
⇒ Abstand gleich Abstand eines beliebigen Punktes von
g2 zu g1
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
43/54
Abstand zweier Geraden
Gegeben: Gerade g1 : #»
r = r#»1 + λs#»1 , λ ∈ R,
#»
Gerade g2 : r = r#»2 + µs#»2 , µ ∈ R
Gesucht: Abstand der beiden Geraden
Lösung:
• s#» und s#» sind nicht kollinear
1
2
* Der kürzeste Abstand liegt dann vor, wenn wir #»
u ∈ g1
#»
und v ∈ g2 derart gefunden haben, dass die Verbinu − #»
v senkrecht auf den beiden Richtungsdungsstrecke #»
#»
vektoren s1 und s#»2 steht.
#» := s#» × s#» 6= #»
* Da w
0 nach der Definition des Vektor1
2
produkts senkrecht auf s#»1 und s#»2 steht, muss #»
u − #»
v ein
#»
Vielfaches von w sein.
* Es muss also
#»
#»
u − #»
v = (r#»1 + λs#»1 ) − (r#»2 + µs#»2 ) = ν w
gelten (LGS für λ, µ und ν).
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
43/54
Abstand zweier windschiefer Geraden I
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
44/54
Abstand zweier windschiefer Geraden II
Darstellung des Spatvolumenns V
• Spatprodukt
V = [s#»1 , s#»2 , r#»1 − r#»2 ]
• Produkt aus der Höhe d und dem Inhalt F der Grundfläche
V = F d = |s#»1 × s#»2 | d
Gleichsetzen und Umstellen liefert
[s#»1 , s#»2 , r#»1 − r#»2 ]
d=
|s#»1 × s#»2 |
Mit dieser Methode kann der Abstand direkt bestimmt werden.
Allerdings erfordert das Bestimmen der Punkte, die den kürzesten
Abstand realisieren, weitere Rechnungen.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
45/54
Ebenen im Raum
Gegeben:
Gesucht:
Lösung:
Gegeben:
Gesucht:
Lösung:
G. Matthies
# »
Punkt P0 mit Ortsvektor r#»0 = OP0 ,
zwei nicht kollineare Vektoren s#»1 , s#»2 ∈ R3
Ortsvektor #»
r eines beliebigen Punktes P der Ebene
durch P0 , die von s#»1 und s#»2 aufgespannt wird
E : #»
r = r#»0 + λs#»1 + µs#»2 , λ, µ ∈ R
Punkte P0 , P1 , P2 , die nicht auf einer Geraden liegen
Ebene E durch diese drei Punkte
E : #»
r = r#»0 + λs#»1 + µs#»2 , λ, µ ∈ R
# »
# »
# »
mit s#»1 = P0 P1 , s#»2 = P0 P2 , r#»0 = OP0
Lineare Algebra und Analysis für Funktionen einer Variablen
46/54
Normalenvektor
Definition
#»
Jeder Vektor #»
n 6= 0 , der senkrecht auf den beiden Richtungsvektoren s#»1 und s#»2 der Ebene E steht, heißt Normalenvektor der
Ebene E . Ein Normalenvektor #»
n mit | #»
n | = 1 heißt Einheitsnormalenvektor oder Normaleneinheitsvektor.
Bemerkung
Nach den Eigenschaften des Vektorprodukts ist s#»1 × s#»2 ein Normalenvektor jeder Ebene E , die durch s#»1 und s#»2 aufgespannt wird.
Es lässt sich zeigen, dass jeder Normalenvektor von E ein Vielfaches von s#»1 × s#»2 ist.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
47/54
Hessesche Normalform I
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
48/54
Hessesche Normalform II
Ebene E : #»
r = r#»0 + λs#»1 + µs#»2 , λ, µ ∈ R, mit
Normaleneinheitsvektor #»
n
Nach der Definition des Normalenvektors gilt für #»
r ∈ E:
#»
#»
#»
#»
#»
#»
r · n = ( r + λs + µs ) · n
Gegeben:
0
1
2
= r#»0 · #»
n + λ s#»1 · #»
n +µ s#»2 · #»
n
| {z }
| {z }
=0
=0
= r#»0 · #»
n
Der Normaleneinheitsvektor #»
n sei so gewählt, dass er vom Ursprung zur Ebene zeigt. Dann gilt für #»
r ∈ E:
% := #»
r · #»
n = | #»
r | | #»
n | cos(ϕ) = | #»
r | cos(ϕ) ≥ 0,
#»
#»
wobei ϕ den Winkel zwischen r und n bezeichnet.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
49/54
Hessesche Normalform III
Hessesche Normalform der Ebene E :
#»
n · #»
r = % bzw. nx x + ny y + nz z = %
mit
nx
x
#»
#»
n = ny , r = y ,
nz
z
wobei #»
n ein Einheitsvektor ist, also
nx2 + ny2 + nz2 = 1
erfüllt ist.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
50/54
Allgemeine Koordinatenform einer Ebene
Gegeben seien a, b, c, d ∈ R mit
a
b 6= #»
0
c
Dann heißt
ax + by + cz = d,
allgemeine Koordinatendarstellung einer Ebene. Der Vektor
a
b
c
ist Normalenvektor von E , hat aber nicht notwendig die Länge 1.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
51/54
Lot auf eine Ebene
Ebene E : #»
r = r#»0 + λs#»1 + µs#»2 , λ, µ ∈ R,
#» := s#» × s#»
w
1
2
#» für λ∗ , µ∗ , ν ∈ R
Löse LGS r#»1 − (r#»0 + λ∗ s#»1 + µ∗ s#»2 ) = ν w
#»|
Abstand von P1 zu E : d = |ν w
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
52/54
Abstand zu einer Ebene
Ebene in Hessescher Normalform #»
n · #»
r = % mit % := #»
n · r#»0
d = #»
n · (r#»1 − r#»0 ) = | #»
n · r#»1 − %| = |nx px + ny py + nz pz − %|
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
53/54
Schnittgerade zweier Ebenen
Gegeben: zwei Ebenen in Hessescher Normalform
E : n#» · #»
r =% ,
E : n#» · #»
r =%
1
1
1
2
2
2
Sind die Normaleneinheitsvektoren n#»1 und n#»2 nicht kollinear, dann
schneiden sich die beiden Ebenen E1 und E2 in einer Geraden g .
Der Richtungsvektor #»
s von g muss in E1 und E2 liegen. Damit
muss er senkrecht auf beiden Vektoren n#»1 und n#»2 stehen. Somit
s = n#»1 × n#»2 wählen.
lässt sich #»
Zur Bestimmung eines Aufpunktes wird eine beliebige Lösung (x, y , z)
des linearen Gleichungssystems
n1x x + n1y y + n1z z = %1 ,
n2x x + n2y y + n2z z = %2 ,
ermittelt.
Es genügt, wenn die Ebenen in allgemeiner Koordinatenform gegeben sind.
G. Matthies
Lineare Algebra und Analysis für Funktionen einer Variablen
54/54