Schnelle Polynommultiplikation Schnelle Polynominterpolation
Werbung

10 Schnelle Fourier-Transformation
◮
Schnelle Polynommultiplikation
◮
Schnelle Polynominterpolation
◮
Schnelle Multiplikation ganzer Zahlen
◮
Anwendungen in der Bildverarbeitung
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.1
Schnelle Polynommultiplikation
P
Mit n hatten wir den Raum der Polynome vom Grad ≤ n
bezeichnet.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.1
Schnelle Polynommultiplikation
P
Mit n hatten wir den Raum der Polynome vom Grad ≤ n
bezeichnet.
Sind p, q ∈
Ausgleichsrechnung
Pn−1, so gilt mit
p(x) = an−1 x n−1 +. . .+a1 x+a0 , q(x) = bn−1 x n−1 +. . .+b1 x+b0 ,
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.1
Schnelle Polynommultiplikation
P
Mit n hatten wir den Raum der Polynome vom Grad ≤ n
bezeichnet.
Sind p, q ∈
Ausgleichsrechnung
Pn−1, so gilt mit
p(x) = an−1 x n−1 +. . .+a1 x+a0 , q(x) = bn−1 x n−1 +. . .+b1 x+b0 ,
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
für das Produkt
r (x) = p(x)q(x) =
2n−2
X
l=0
cl x l ,
cl =
X
j+k=l
Metrische und
aj bk , l = 0, . . . , 2n−2.normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.1
Schnelle Polynommultiplikation
P
Mit n hatten wir den Raum der Polynome vom Grad ≤ n
bezeichnet.
Sind p, q ∈
Ausgleichsrechnung
Pn−1, so gilt mit
p(x) = an−1 x n−1 +. . .+a1 x+a0 , q(x) = bn−1 x n−1 +. . .+b1 x+b0 ,
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
für das Produkt
r (x) = p(x)q(x) =
2n−2
X
l=0
cl x l ,
cl =
X
Metrische und
aj bk , l = 0, . . . , 2n−2.normierte Räume
j+k=l
Es wurde die Konvention aj , bj = 0 für j > n − 1 verwendet.
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.1
Schnelle Polynommultiplikation
r (x) = p(x)q(x) =
2n−2
X
l=0
Ausgleichsrechnung
cl x l ,
cl =
X
j+k=l
aj bk , l = 0, . . . , 2n−2. Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.1
Schnelle Polynommultiplikation
r (x) = p(x)q(x) =
2n−2
X
l=0
Ausgleichsrechnung
cl x l ,
cl =
X
aj bk , l = 0, . . . , 2n−2. Problemstelllung
Das lineare
j+k=l
Da jeder Koeffizient des einen Polynoms mit jedem
Koeffizienten des anderen Polynoms multipliziert wird,
benötigen wir für die direkte Polynommultiplikation:
n2 Multiplikationen und O(n2 ) Additionen.
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Alternative Interpolation
Eine Alternative zur direkten Multiplikation ist die
Polynominterpolation nach Lagrange.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Alternative Interpolation
Eine Alternative zur direkten Multiplikation ist die
Polynominterpolation nach Lagrange.
Demnach ist ein Polynom vom Grade n − 1 durch die Werte
p(xj ) an n verschiedenen Stützstellen x1 , . . . , xn eindeutig
bestimmt.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Alternative Interpolation
Eine Alternative zur direkten Multiplikation ist die
Polynominterpolation nach Lagrange.
Demnach ist ein Polynom vom Grade n − 1 durch die Werte
p(xj ) an n verschiedenen Stützstellen x1 , . . . , xn eindeutig
bestimmt.
Algorithmus:
◮
Werte die Polynome p und q an 2n − 1 verschiedenen
Stellen aus.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Alternative Interpolation
Eine Alternative zur direkten Multiplikation ist die
Polynominterpolation nach Lagrange.
Demnach ist ein Polynom vom Grade n − 1 durch die Werte
p(xj ) an n verschiedenen Stützstellen x1 , . . . , xn eindeutig
bestimmt.
Algorithmus:
◮
◮
Werte die Polynome p und q an 2n − 1 verschiedenen
Stellen aus.
Bestimme die 2n − 1 Produkte p(xj )q(xj ).
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Alternative Interpolation
Eine Alternative zur direkten Multiplikation ist die
Polynominterpolation nach Lagrange.
Demnach ist ein Polynom vom Grade n − 1 durch die Werte
p(xj ) an n verschiedenen Stützstellen x1 , . . . , xn eindeutig
bestimmt.
Algorithmus:
◮
◮
◮
Werte die Polynome p und q an 2n − 1 verschiedenen
Stellen aus.
Bestimme die 2n − 1 Produkte p(xj )q(xj ).
Bestimme das Interpolationspolynom zu diesen
Produkten.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Alternative Interpolation
Da das Interpolationspolynom eindeutig bestimmt ist, wird
durch diese Vorgehensweise das Produktpolynom
reproduziert.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Alternative Interpolation
Da das Interpolationspolynom eindeutig bestimmt ist, wird
durch diese Vorgehensweise das Produktpolynom
reproduziert.
Dieses Verfahren ist zunächst weniger effektiv als die direkte
Methode:
◮
Bei Bestimmung des Interpolationspolynoms nach der
Newton-Formel werden O(n2 ) Operationen benötigt.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Alternative Interpolation
Da das Interpolationspolynom eindeutig bestimmt ist, wird
durch diese Vorgehensweise das Produktpolynom
reproduziert.
Dieses Verfahren ist zunächst weniger effektiv als die direkte
Methode:
◮
Bei Bestimmung des Interpolationspolynoms nach der
Newton-Formel werden O(n2 ) Operationen benötigt.
◮
Die Auswertung des Newton-Polynoms kostet O(n)
Operationen für jeden Interpolationspunkt.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Komplexwertige Stützstellen
Die Idee der schnellen Polynommultiplikation besteht in einer
vorteilhaften Wahl der Stützstellen xj , die eine simultane
Auswertung von p(xj ) gestattet.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Komplexwertige Stützstellen
Die Idee der schnellen Polynommultiplikation besteht in einer
vorteilhaften Wahl der Stützstellen xj , die eine simultane
Auswertung von p(xj ) gestattet.
Der Satz über die Lagrange-Interpolation ist auch für
komplexe Stützstellen richtig: Die Lagrange-Polynome
(x − x1 ) . . . (x − xk−1 )(x − xk+1 ) . . . (x − xn )
(xk − x1 ) . . . (xk − xk−1 )(xk − xk+1 ) . . . (xk − xn )
Y x − xi
.
=
xk − xi
lk (x) =
i6=k
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Komplexwertige Stützstellen
Die Idee der schnellen Polynommultiplikation besteht in einer
vorteilhaften Wahl der Stützstellen xj , die eine simultane
Auswertung von p(xj ) gestattet.
Der Satz über die Lagrange-Interpolation ist auch für
komplexe Stützstellen richtig: Die Lagrange-Polynome
(x − x1 ) . . . (x − xk−1 )(x − xk+1 ) . . . (x − xn )
(xk − x1 ) . . . (xk − xk−1 )(xk − xk+1 ) . . . (xk − xn )
Y x − xi
.
=
xk − xi
lk (x) =
i6=k
sind auch für xj ∈
C wohldefiniert.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Komplexwertige Stützstellen
(x − x1 ) . . . (x − xk−1 )(x − xk+1 ) . . . (x − xn )
(xk − x1 ) . . . (xk − xk−1 )(xk − xk+1 ) . . . (xk − xn )
Y x − xi
.
=
xk − xi
lk (x) =
i6=k
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Komplexwertige Stützstellen
(x − x1 ) . . . (x − xk−1 )(x − xk+1 ) . . . (x − xn )
(xk − x1 ) . . . (xk − xk−1 )(xk − xk+1 ) . . . (xk − xn )
Y x − xi
.
=
xk − xi
lk (x) =
i6=k
p(x) =
X
fj lj (x) löst die Interpolationsaufgabe p(xj ) = fj .
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Komplexwertige Stützstellen
(x − x1 ) . . . (x − xk−1 )(x − xk+1 ) . . . (x − xn )
(xk − x1 ) . . . (xk − xk−1 )(xk − xk+1 ) . . . (xk − xn )
Y x − xi
.
=
xk − xi
lk (x) =
i6=k
p(x) =
X
fj lj (x) löst die Interpolationsaufgabe p(xj ) = fj .
Auch der Beweis der Eindeutigkeit des
Interpolationspolynoms überträgt sich wörtlich aus dem
reellen Fall.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Komplexe Einheitswurzeln
Um ein Polynom an n Stellen auszuwerten, verwenden wir die
komplexen Einheitswurzeln
ωn = exp
2πi n
,
ωnk = exp
2kπi n
, k = 0, . . . , n − 1.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Komplexe Einheitswurzeln
Um ein Polynom an n Stellen auszuwerten, verwenden wir die
komplexen Einheitswurzeln
ωn = exp
2πi n
,
ωnk = exp
Für diese gilt
ωnk = ωnk+ln
wegen exp(z) = exp(z + 2πi).
2kπi n
∀l ∈
, k = 0, . . . , n − 1.
Z
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Die grundlegende Idee
Sei nun n gerade und p ein Polynom vom Grade ≤ n − 1.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Die grundlegende Idee
Sei nun n gerade und p ein Polynom vom Grade ≤ n − 1.
Wir schreiben
p(x) = an−1 x n−1 + an−2 x n−2 + . . . + a2 x 2 + a1 x + a0
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
= (an−2 x n−2 + . . . + a2 x 2 + a0 ) + x(an−1 x n−2 + . . . + a3 x 2Grundlagen
+ a1 )
= pg (x 2 ) + xpu (x 2 ).
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Die grundlegende Idee
Sei nun n gerade und p ein Polynom vom Grade ≤ n − 1.
Wir schreiben
p(x) = an−1 x n−1 + an−2 x n−2 + . . . + a2 x 2 + a1 x + a0
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
= (an−2 x n−2 + . . . + a2 x 2 + a0 ) + x(an−1 x n−2 + . . . + a3 x 2Grundlagen
+ a1 )
= pg (x 2 ) + xpu (x 2 ).
Um p(ωnk ), k = 0, . . . , n − 1 zu bestimmen, müssen die
k
ausgewertet
Polynome pg und pu an den Stellen ωn2k = ωn/2
werden.
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Die grundlegende Idee
Sei nun n gerade und p ein Polynom vom Grade ≤ n − 1.
Wir schreiben
p(x) = an−1 x n−1 + an−2 x n−2 + . . . + a2 x 2 + a1 x + a0
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
= (an−2 x n−2 + . . . + a2 x 2 + a0 ) + x(an−1 x n−2 + . . . + a3 x 2Grundlagen
+ a1 )
= pg (x 2 ) + xpu (x 2 ).
Um p(ωnk ), k = 0, . . . , n − 1 zu bestimmen, müssen die
k
ausgewertet
Polynome pg und pu an den Stellen ωn2k = ωn/2
werden.
Dies sind
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
n/2−1
0
ωn/2
, . . . , ωn/2 .
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Die grundlegende Idee
p(x) = pg (x 2 ) + xpu (x 2 ).
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Die grundlegende Idee
p(x) = pg (x 2 ) + xpu (x 2 ).
k
aus.
Werte pg und pu an den Stellen ωn2k = ωn/2
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Die grundlegende Idee
p(x) = pg (x 2 ) + xpu (x 2 ).
k
aus.
Werte pg und pu an den Stellen ωn2k = ωn/2
pg und pu besitzen nur noch den Grad n/2 − 1 !
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Die grundlegende Idee
p(x) = pg (x 2 ) + xpu (x 2 ).
k
aus.
Werte pg und pu an den Stellen ωn2k = ωn/2
pg und pu besitzen nur noch den Grad n/2 − 1 !
Ferner lassen sich die Auswertungen von pg und pu zweimal
verwenden, nämlich für k = 0, . . . , n/2 − 1 und für k + n/2
wegen
2k+2n/2
ωn2k = ωn
.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Auswertung des Polynoms = FFT
Da das beschriebene Verfahren offenbar rekursiv durchgeführt
werden kann, wenn n eine Zweierpotenz ist, nehmen wir nun
n = 2l an.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Auswertung des Polynoms = FFT
Da das beschriebene Verfahren offenbar rekursiv durchgeführt
werden kann, wenn n eine Zweierpotenz ist, nehmen wir nun
n = 2l an.
Das Programm
recursive subroutine FFT (n, p, ω, a)
bestimmt die Auswertung eines Polynoms vom Grade n − 1
in den n Punkten ωn0 , . . . , ωnn−1 .
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Auswertung des Polynoms = FFT
Da das beschriebene Verfahren offenbar rekursiv durchgeführt
werden kann, wenn n eine Zweierpotenz ist, nehmen wir nun
n = 2l an.
Das Programm
recursive subroutine FFT (n, p, ω, a)
bestimmt die Auswertung eines Polynoms vom Grade n − 1
in den n Punkten ωn0 , . . . , ωnn−1 .
Input: n = 2l ist die Länge des Problems, p ist das
auszuwertende Polynom als n-Vektor p = (a0 , . . . , an−1 )
gespeichert und ω = ωn ..
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Auswertung des Polynoms = FFT
Da das beschriebene Verfahren offenbar rekursiv durchgeführt
werden kann, wenn n eine Zweierpotenz ist, nehmen wir nun
n = 2l an.
Das Programm
recursive subroutine FFT (n, p, ω, a)
bestimmt die Auswertung eines Polynoms vom Grade n − 1
in den n Punkten ωn0 , . . . , ωnn−1 .
Input: n = 2l ist die Länge des Problems, p ist das
auszuwertende Polynom als n-Vektor p = (a0 , . . . , an−1 )
gespeichert und ω = ωn ..
Output: der n-Vektor a = (p(ω 0 ), . . . , p(ω n−1 )).
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
FFT
recursive subroutine FFT (n, p, ω, a)
if n = 1 then
a(0) = p(0)
else
n2 = n/2
pg = (a0 , a2 , . . . , an−2 )
pu = (a1 , a3 , . . . , an−1 )
call FFT (n2 , pg , ω 2 , g )
call FFT (n2 , pu , ω 2 , u)
do k = 0, n2 − 1
a(k) = g (k) + ω k u(k)
a(k + n2 ) = g (k) − ω k u(k) !∗
enddo
endif
end
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
FFT
recursive subroutine FFT (n, p, ω, a)
if n = 1 then
a(0) = p(0)
else
n2 = n/2
pg = (a0 , a2 , . . . , an−2 )
pu = (a1 , a3 , . . . , an−1 )
call FFT (n2 , pg , ω 2 , g )
call FFT (n2 , pu , ω 2 , u)
do k = 0, n2 − 1
a(k) = g (k) + ω k u(k)
a(k + n2 ) = g (k) − ω k u(k) !∗
enddo
endif
end
k+n/2
∗: ωn
n/2
= ωnk ωn
= −ωnk
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Multiplikationen bei FFT
Bestimmen die Anzahl der Multiplikationen M(n) für diesen
Algorithmus.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Multiplikationen bei FFT
Bestimmen die Anzahl der Multiplikationen M(n) für diesen
Algorithmus.
ω k können einmal berechnet und anschließend abgespeichert
werden.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Multiplikationen bei FFT
Bestimmen die Anzahl der Multiplikationen M(n) für diesen
Algorithmus.
ω k können einmal berechnet und anschließend abgespeichert
werden.
Multiplikationen fallen nur in
do k = 0, n2 − 1
a(k) = g (k) + ω k u(k)
a(k + n2 ) = g (k) − ω k u(k)
enddo
an.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Multiplikationen bei FFT
Bestimmen die Anzahl der Multiplikationen M(n) für diesen
Algorithmus.
ω k können einmal berechnet und anschließend abgespeichert
werden.
Multiplikationen fallen nur in
do k = 0, n2 − 1
a(k) = g (k) + ω k u(k)
a(k + n2 ) = g (k) − ω k u(k)
enddo
an.
Daher: Nur die n/2 Multiplikationen ω k u(k)!
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Multiplikationen bei FFT
Da FFT zweimal mit Inputlänge n/2 aufgerufen wird, genügt
M(n) der Rekursion
M(n) = 2M
n n
+
2
2
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Multiplikationen bei FFT
Da FFT zweimal mit Inputlänge n/2 aufgerufen wird, genügt
M(n) der Rekursion
M(n) = 2M
für n = 2l daher
l
n n
+
2
2
l−1
M(2 ) = 2M(2
l−1
)+2
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
.
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Multiplikationen bei FFT
Da FFT zweimal mit Inputlänge n/2 aufgerufen wird, genügt
M(n) der Rekursion
M(n) = 2M
für n = 2l daher
l
n n
+
2
2
l−1
M(2 ) = 2M(2
l−1
)+2
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
.
Iterieren wir diese Beziehung l mal, so erhalten wir
M(2l ) = l 2l−1 + M(1)2l .
Ausgleichsrechnung
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Multiplikationen bei FFT
M(2l ) = l 2l−1 + M(1)2l .
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Multiplikationen bei FFT
M(2l ) = l 2l−1 + M(1)2l .
Es ist M(1) = 0 und daher
M(n) =
n
log n,
2
wobei mit log der Logarithmus zur Basis 2 bezeichnet wird.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Multiplikationen bei FFT
M(2l ) = l 2l−1 + M(1)2l .
Es ist M(1) = 0 und daher
M(n) =
n
log n,
2
wobei mit log der Logarithmus zur Basis 2 bezeichnet wird.
Anzahl der Addditionen ist analog. Wir erhalten für die
Gesamtzahl an Operationen ebenfalls O(n log n).
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
Nun wenden wir uns dem Interpolationsproblem zu:
Zu b0 , . . . , bn−1 suche ein Polynom p ∈
Pn−1 mit
p(ωnk ) = bk für k = 0, . . . , n − 1.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
Nun wenden wir uns dem Interpolationsproblem zu:
Zu b0 , . . . , bn−1 suche ein Polynom p ∈
Pn−1 mit
p(ωnk ) = bk für k = 0, . . . , n − 1.
Wie bereits zu Anfang dieses Abschnitts gezeigt wurde,
existiert ein solches Polynom und ist eindeutig bestimmt.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
Nun wenden wir uns dem Interpolationsproblem zu:
Zu b0 , . . . , bn−1 suche ein Polynom p ∈
Pn−1 mit
p(ωnk ) = bk für k = 0, . . . , n − 1.
Wie bereits zu Anfang dieses Abschnitts gezeigt wurde,
existiert ein solches Polynom und ist eindeutig bestimmt.
Um dieses Problem anzugehen, deuten wir zunächst die
Polynomauswertung als Multiplikation einer Matrix mit einem
Vektor.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
C
Zu α = (α0 , . . . , αn−1 )T ∈ n mit paarweise verschiedenen
αk definieren wir die zugehörige Vandermondsche Matrix als
1 α0
α02 · · · α0n−1
1 α1
α12 · · · α1n−1
.
V (α) =
.
.
.
.
.
.
..
..
..
..
.
n−1
2
1 αn−1 αn−1
· · · αn−1
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
V (α) =
1
α0
α02
1
..
.
α1
..
.
α12
..
.
· · · α0n−1
· · · α1n−1
..
..
.
.
n−1
2
1 αn−1 αn−1
· · · αn−1
Für ein Polynom
p(x) =
n−1
X
j=0
aj x j
.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
V (α) =
1
α0
α02
1
..
.
α1
..
.
α12
..
.
· · · α0n−1
· · · α1n−1
..
..
.
.
n−1
2
1 αn−1 αn−1
· · · αn−1
Für ein Polynom
p(x) =
n−1
X
.
aj x j
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
j=0
Nichtlineare Gleichungssysteme
gilt dann
Interpolation
b := p(α0 ), . . . , p(αn−1 )
T
= V (α)a,
a = (a0 , . . . , an−1 )T .
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
b := p(α0 ), . . . , p(αn−1 )
T
= V (α)a,
a = (a0 , . . . , an−1 )T .
Die Auswertung von p an den Stellen α0 , . . . , αn−1 ist also
nichts anderes als die Bestimmung von V (α)a.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
b := p(α0 ), . . . , p(αn−1 )
T
= V (α)a,
a = (a0 , . . . , an−1 )T .
Die Auswertung von p an den Stellen α0 , . . . , αn−1 ist also
nichts anderes als die Bestimmung von V (α)a.
Die Rekonstruktion der Koeffizienten a0 , . . . , an−1 aus den
Daten bk = p(αk ) (=Interpolation) ist das dazu inverse
Problem und wird durch
a = V (α)−1 b
gelöst.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
Bei der speziellen Wahl α = (ωn0 , . . . , ωnn−1 )T kann die
inverse Matrix zu V (α) leicht angegeben werden.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
Bei der speziellen Wahl α = (ωn0 , . . . , ωnn−1 )T kann die
inverse Matrix zu V (α) leicht angegeben werden.
Für eine komplexe Zahl β schreiben wir
[β] = (β 0 , . . . , β n−1 )T .
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
Bei der speziellen Wahl α = (ωn0 , . . . , ωnn−1 )T kann die
inverse Matrix zu V (α) leicht angegeben werden.
Für eine komplexe Zahl β schreiben wir
[β] = (β 0 , . . . , β n−1 )T .
Satz Für die n-te Einheitswurzel ωn = exp(2πi/n) gilt
V ([ωn ])−1 =
1
V ([ωn−1 ]).
n
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beweis
Für die Matrix W = V ([ωn ])V ([ωn−1 ]) gilt
wjk =
n−1
X
l=0
ωnjl ωn−kl
n−1
X
(ωnj−k )l .
=
l=0
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beweis
Für die Matrix W = V ([ωn ])V ([ωn−1 ]) gilt
wjk =
n−1
X
l=0
ωnjl ωn−kl
n−1
X
(ωnj−k )l .
=
l=0
Für j = k erhalten wir wjj = n. Für j 6= k ist 0 < |j − k| < n
und damit ωnj−k 6= 1.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beweis
Für die Matrix W = V ([ωn ])V ([ωn−1 ]) gilt
wjk =
n−1
X
ωnjl ωn−kl
n−1
X
(ωnj−k )l .
=
l=0
l=0
Für j = k erhalten wir wjj = n. Für j 6= k ist 0 < |j − k| < n
und damit ωnj−k 6= 1.
Wir können daher die geometrische Summenformel
anwenden, also
n−1
X
l=0
n(j−k)
wegen ωn
(ωnj−k )l =
n(j−k)
ωn
−1
j−k
ωn − 1
= (ωnn )j−k = 1.
=0
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
Der Algorithmus zur Bestimmung des Interpolationspolynoms
p ∈ n−1 aus den Daten b := p(1), p(ωn1 ), . . . , p(ωnn−1 ) :
P
subroutine FFI (n, b, ω, p)
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
Der Algorithmus zur Bestimmung des Interpolationspolynoms
p ∈ n−1 aus den Daten b := p(1), p(ωn1 ), . . . , p(ωnn−1 ) :
P
subroutine FFI (n, b, ω, p)
Input: die Länge n = 2l , der n-Vektor b und ω = ωn .
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
Der Algorithmus zur Bestimmung des Interpolationspolynoms
p ∈ n−1 aus den Daten b := p(1), p(ωn1 ), . . . , p(ωnn−1 ) :
P
subroutine FFI (n, b, ω, p)
Input: die Länge n = 2l , der n-Vektor b und ω = ωn .
Output: Das gesuchte Polynom auf dem n-Vektor
p = (a0 , . . . , an−1 ).
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Das Interpolationsproblem = FFI
Der Algorithmus zur Bestimmung des Interpolationspolynoms
p ∈ n−1 aus den Daten b := p(1), p(ωn1 ), . . . , p(ωnn−1 ) :
P
subroutine FFI (n, b, ω, p)
Input: die Länge n = 2l , der n-Vektor b und ω = ωn .
Output: Das gesuchte Polynom auf dem n-Vektor
p = (a0 , . . . , an−1 ).
subroutine FFI (n, b, ω, p)
call FFT (n, b, ω −1 , p)
p = n−1 p
end
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Schnelle Multiplikation von Polynomen
Seien p, q ∈
Pk
Ziel: r = p · q
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Schnelle Multiplikation von Polynomen
Seien p, q ∈
Pk
Ziel: r = p · q
Ausgleichsrechnung
2l
Bestimme die kleinste Zahl l mit n = > 2k und rufen mit
ω = ωn
FFT (n, p, ω, a), FFT (n, q, ω, b)
auf.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Schnelle Multiplikation von Polynomen
Seien p, q ∈
Pk
Ziel: r = p · q
Ausgleichsrechnung
2l
Bestimme die kleinste Zahl l mit n = > 2k und rufen mit
ω = ωn
FFT (n, p, ω, a), FFT (n, q, ω, b)
auf.
Berechne c(k) = a(k)b(k) für k = 0, . . . , n − 1, was n
Multiplikationen entspricht.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Schnelle Multiplikation von Polynomen
Seien p, q ∈
Pk
Ziel: r = p · q
Ausgleichsrechnung
2l
Bestimme die kleinste Zahl l mit n = > 2k und rufen mit
ω = ωn
FFT (n, p, ω, a), FFT (n, q, ω, b)
auf.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Berechne c(k) = a(k)b(k) für k = 0, . . . , n − 1, was n
Multiplikationen entspricht.
Mit dem Aufruf von
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
FFI (n, c, ω, r )
stehen auf dem Vektor r die Koeffizienten des gesuchten
Produkts p(x)q(x).
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Schnelle Multiplikation von Polynomen
Seien p, q ∈
Pk
Ziel: r = p · q
Ausgleichsrechnung
2l
Bestimme die kleinste Zahl l mit n = > 2k und rufen mit
ω = ωn
FFT (n, p, ω, a), FFT (n, q, ω, b)
auf.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Berechne c(k) = a(k)b(k) für k = 0, . . . , n − 1, was n
Multiplikationen entspricht.
Mit dem Aufruf von
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
FFI (n, c, ω, r )
stehen auf dem Vektor r die Koeffizienten des gesuchten
Produkts p(x)q(x).
Der gesamte Algorithmus benötigt immer noch O(n log n)
und wegen n ≤ 4k auch O(k log k) Rechenoperationen.
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.2
Schnelle Multiplikation natürlicher Zahlen
Liegen natürliche Zahlen a, b in einem Stellenwertsystem zur
Basis g vor und besitzen diese Zahlen eine Länge ≤ K , so
lassen sie sich mit O(K 2 ) Operationen multiplizieren.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.2
Schnelle Multiplikation natürlicher Zahlen
Liegen natürliche Zahlen a, b in einem Stellenwertsystem zur
Basis g vor und besitzen diese Zahlen eine Länge ≤ K , so
lassen sie sich mit O(K 2 ) Operationen multiplizieren.
Eine Operation besteht aus der Multiplikation zweier Ziffern
oder der Addition zweier ganzer Zahlen.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.2
Schnelle Multiplikation natürlicher Zahlen
Liegen natürliche Zahlen a, b in einem Stellenwertsystem zur
Basis g vor und besitzen diese Zahlen eine Länge ≤ K , so
lassen sie sich mit O(K 2 ) Operationen multiplizieren.
Eine Operation besteht aus der Multiplikation zweier Ziffern
oder der Addition zweier ganzer Zahlen.
Alternativ können wir a und b die Polynome
pa (x) =
K
−1
X
i=0
ai x i ,
pb (x) =
K
−1
X
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
bi x i
i=0
zuordnen, wobei ai , bi ∈ {0, 1 . . . , g − 1} die zugehörigen
Ziffern sind.
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.2
Schnelle Multiplikation natürlicher Zahlen
pa (x) =
K
−1
X
i
ai x ,
pb (x) =
i=0
mit „Ziffern“ ai , bi ∈ {0, 1 . . . , g − 1}.
K
−1
X
i=0
bi x i
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.2
Schnelle Multiplikation natürlicher Zahlen
pa (x) =
K
−1
X
i
ai x ,
pb (x) =
i=0
mit „Ziffern“ ai , bi ∈ {0, 1 . . . , g − 1}.
K
−1
X
bi x i
i=0
Mit der schnellen Polynommultiplikation kann
pc (x) = pa (x)pb (x)
bestimmt werden.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.2
Schnelle Multiplikation natürlicher Zahlen
pa (x) =
K
−1
X
i
ai x ,
pb (x) =
i=0
mit „Ziffern“ ai , bi ∈ {0, 1 . . . , g − 1}.
K
−1
X
bi x i
i=0
Mit der schnellen Polynommultiplikation kann
pc (x) = pa (x)pb (x)
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
bestimmt werden.
Metrische und
normierte Räume
Entferne aus pc (g ) den Übertrag - fertig!
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Vorsicht: Rundungsfehler
Mit dem im vorigen Abschnitt dargestellten
Multiplikationsverfahren erhalten wir aufgrund von
Rundungsfehlern ein Polynom p̃c , dessen Koeffizienten
Gleitkommazahlen sind.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Vorsicht: Rundungsfehler
Mit dem im vorigen Abschnitt dargestellten
Multiplikationsverfahren erhalten wir aufgrund von
Rundungsfehlern ein Polynom p̃c , dessen Koeffizienten
Gleitkommazahlen sind.
Die verwendete Gleitkommaarithmetik muss so ausgelegt
sein, dass aus p̃c durch Rundung das korrekte Polynom
pc ∈ entsteht.
N
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Anforderung an die Arithmetik
Wir betrachten den Spezialfall
K = 2k und g = 2l ,
mit dem Zahlen der Bitlänge n ≤ 12 Kl miteinander
multipliziert werden können.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Anforderung an die Arithmetik
Wir betrachten den Spezialfall
K = 2k und g = 2l ,
mit dem Zahlen der Bitlänge n ≤ 12 Kl miteinander
multipliziert werden können.
Verwenden wir für die schnelle Fouriertransformation eine
Gleitkommaarithmetik der Genauigkeit 2−m , so erhält man
nach Rundung von p̃c das exakte Polynom pc , falls
m ≥ 3k + 2l + log k + 7/2.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Anforderung an die Arithmetik
m ≥ 3k + 2l + log k + 7/2.
Um Zahlen der Bitlänge
n = 213 = 8192
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
miteinander zu multiplizieren, können wir hier l = 8, k = 11
setzen und erhalten m = 55.
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Anforderung an die Arithmetik
m ≥ 3k + 2l + log k + 7/2.
Um Zahlen der Bitlänge
n = 213 = 8192
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
miteinander zu multiplizieren, können wir hier l = 8, k = 11
setzen und erhalten m = 55.
Das wird von einer doppelt genauen Gleitkommaarithmetik
geleistet.
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Anforderung an die Arithmetik
m ≥ 3k + 2l + log k + 7/2.
Um Zahlen der Bitlänge
n = 213 = 8192
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
miteinander zu multiplizieren, können wir hier l = 8, k = 11
setzen und erhalten m = 55.
Das wird von einer doppelt genauen Gleitkommaarithmetik
geleistet.
Für die meisten praktisch relevanten Fälle lassen sich damit
zwei n-stellige Zahlen in O(n log n) Gleitkommaoperationen
miteinander multiplizieren.
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Anforderung an die Arithmetik
Für die Multiplikation noch größerer Zahlen kann auch die
Gleitkommamultiplikation mit Hilfe der schnellen
Fouriertransformation beschleunigt werden.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Anforderung an die Arithmetik
Für die Multiplikation noch größerer Zahlen kann auch die
Gleitkommamultiplikation mit Hilfe der schnellen
Fouriertransformation beschleunigt werden.
Für den Gesamtalgorithmus haben wir dann eine Komplexität
von
O(n log n log(log n))
die allerdings auch nur bis zu einer sehr großen Zahl n richtig
ist.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Modalen Fouriertransformation
In der modalen Fouriertransformation von Schönhage und
Strassen (1971) werden kommutative Ringe mit n-ter
Einheitswurzel verwendet, die letztlich aus ganzen Zahlen
bestehen.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Modalen Fouriertransformation
In der modalen Fouriertransformation von Schönhage und
Strassen (1971) werden kommutative Ringe mit n-ter
Einheitswurzel verwendet, die letztlich aus ganzen Zahlen
bestehen.
Damit kann man zwei n-stellige Zahlen in
O(n log n log(log n)) miteinander multiplizieren, in diesem
Fall ohne Einschränkung an n.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.3
Diskrete Fourier-Transformation und Bildverarbeitung
Im folgenden schreiben wir einen Vektor des
Cn in der Form
f = (f (0), f (1), . . . , f (n − 1)).
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.3
Diskrete Fourier-Transformation und Bildverarbeitung
Im folgenden schreiben wir einen Vektor des
Cn in der Form
f = (f (0), f (1), . . . , f (n − 1)).
Wir stellen uns f als eine eindimensionale stückweise
konstante Funktion vor oder noch besser als die (reellen)
Grauwerte eines eindimensionalen Bildes.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.3
Diskrete Fourier-Transformation und Bildverarbeitung
Im folgenden schreiben wir einen Vektor des
Cn in der Form
f = (f (0), f (1), . . . , f (n − 1)).
Wir stellen uns f als eine eindimensionale stückweise
konstante Funktion vor oder noch besser als die (reellen)
Grauwerte eines eindimensionalen Bildes.
n wird immer als geradzahlig vorausgesetzt.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Diskrete Wellenfunktionen
Für k = 0, . . . , n − 1 definieren wir die diskreten
Wellenfunktionen
2πik √
j , j = 0, . . . , n − 1, i = −1.
φk (j) = exp
n
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Diskrete Wellenfunktionen
Für k = 0, . . . , n − 1 definieren wir die diskreten
Wellenfunktionen
2πik √
j , j = 0, . . . , n − 1, i = −1.
φk (j) = exp
n
Die Größe
2πk
θk =
n
ist die Frequenz der Wellenfunktion φk .
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Diskrete Wellenfunktionen
Für k = 0, . . . , n − 1 definieren wir die diskreten
Wellenfunktionen
2πik √
j , j = 0, . . . , n − 1, i = −1.
φk (j) = exp
n
Die Größe
2πk
θk =
n
ist die Frequenz der Wellenfunktion φk .
Die Funktion φ0 ist konstant 1 und φ1 (j) führt für
j = 0, . . . , n − 1 eine volle Cosinus- bzw. Sinus-Schwingung
in Real- bzw. Imaginärteil durch.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Diskrete Wellenfunktionen
Für beliebiges k ≥ 1 gilt
φn−k (j) = exp(2πij(n − k)/n)
= exp(2πj) exp(−2πijk/n) = φk (j).
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Diskrete Wellenfunktionen
Für beliebiges k ≥ 1 gilt
φn−k (j) = exp(2πij(n − k)/n)
= exp(2πj) exp(−2πijk/n) = φk (j).
Für k < n/2 spannen daher φk und φn−k den
zweidimensionalen reellen Raum
span {cos(2πjk/n), sin(2πjk/n)}
auf.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Diskrete Wellenfunktionen
Für beliebiges k ≥ 1 gilt
φn−k (j) = exp(2πij(n − k)/n)
= exp(2πj) exp(−2πijk/n) = φk (j).
Für k < n/2 spannen daher φk und φn−k den
zweidimensionalen reellen Raum
span {cos(2πjk/n), sin(2πjk/n)}
auf.
Für kleine k entsprechen φk , φn−k langen Wellen, zu
k ∼ n/2 gehören kurze Wellen.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
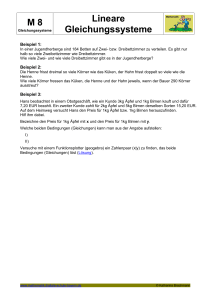
Diskrete Wellenfunktionen
φ0
Re φ 1
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
φ N/2
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Orthogonalität der Wellenfunktionen
Auf dem
Cn verwenden wir das Standardprodukt
(f , g )n =
n−1
X
j=0
f (j) g (j).
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Orthogonalität der Wellenfunktionen
Auf dem
Cn verwenden wir das Standardprodukt
(f , g )n =
n−1
X
f (j) g (j).
j=0
Satz Die Funktionen φk , k = 0, . . . , n − 1, bilden eine
Orthogonalbasis des n , es gilt
C
(φk , φl )n = nδkl .
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beweis
Wir zeigen zunächst
n−1
X
k=0
exp(2πikr /n) =
Ausgleichsrechnung
(
n falls r = ln für ein l ∈
Z
0 für alle sonstigen ganzzahligen r
.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beweis
Wir zeigen zunächst
n−1
X
k=0
exp(2πikr /n) =
Ausgleichsrechnung
(
Für r = ln ist dies klar.
n falls r = ln für ein l ∈
Z
0 für alle sonstigen ganzzahligen r
.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beweis
Wir zeigen zunächst
n−1
X
exp(2πikr /n) =
k=0
Ausgleichsrechnung
(
n falls r = ln für ein l ∈
Z
0 für alle sonstigen ganzzahligen r
Grundlagen
Für r = ln ist dies klar.
Direkte Lösung
linearer Gleichungssysteme
Für r 6= ln können wir mit
exp(2πikr /n) = exp(2πir /n)k = ω k ,
ω = ω 0 6= 1,
wie zuvor die geometrische Summenformel anwenden,
n−1
X
k=0
exp(2πikr /n) =
.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
n−1
X
k=0
ωn − 1
= 0.
ω =
ω−1
k
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beweis
n−1
X
k=0
exp(2πikr /n) =
(
n falls r = ln für ein l ∈
Z
0 für alle sonstigen ganzzahligen r
Ausgleichsrechnung
.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beweis
n−1
X
exp(2πikr /n) =
k=0
(
n falls r = ln für ein l ∈
Z
0 für alle sonstigen ganzzahligen r
Daraus folgt für k, l = 0, . . . , n − 1
(φk , φl )n =
n−1
X
exp(2πijk/n) exp(−2πijl /n)
j=0
=
n−1
X
j=0
Ausgleichsrechnung
.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
exp(2πij(k − l )/n) = nδkl .
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Fourierkoeffizienten
Ist {vk } eine Orthogonalbasis eines komplexen endlich
dimensionalen Raumes mit Produkt (·, ·), so gilt für jeden
Vektor u dieses Raumes
X
u=
αk vk .
k
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Fourierkoeffizienten
Ist {vk } eine Orthogonalbasis eines komplexen endlich
dimensionalen Raumes mit Produkt (·, ·), so gilt für jeden
Vektor u dieses Raumes
X
u=
αk vk .
k
Wir multiplizieren diese Identität skalar mit vl und erhalten
wegen der Orthogonalität der vk
X
(αk vk , vl ) = αl (vl , vl )
(u, vl ) =
k
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Fourierkoeffizienten
Ist {vk } eine Orthogonalbasis eines komplexen endlich
dimensionalen Raumes mit Produkt (·, ·), so gilt für jeden
Vektor u dieses Raumes
X
u=
αk vk .
k
Wir multiplizieren diese Identität skalar mit vl und erhalten
wegen der Orthogonalität der vk
X
(αk vk , vl ) = αl (vl , vl )
(u, vl ) =
k
und daher
(u, vl )
αl =
.
(vl , vl )
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Fourierkoeffizienten und Diskrete Fourier-Transformation
Im Spezialfall der diskreten Fourier-Transformation sind die
vk die Wellenfunktionen φk .
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Fourierkoeffizienten und Diskrete Fourier-Transformation
Im Spezialfall der diskreten Fourier-Transformation sind die
vk die Wellenfunktionen φk .
Die Fourier-Transformierte Fn f ∈
n−1
Fn f (l ) =
Cn ist
1X
1
(f , φl )n =
f (j) exp(−2πijl /n),
n
n
j=0
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
l = 0, . . . , n−1.
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Fourierkoeffizienten und Diskrete Fourier-Transformation
Im Spezialfall der diskreten Fourier-Transformation sind die
vk die Wellenfunktionen φk .
Die Fourier-Transformierte Fn f ∈
Cn ist
n−1
Fn f (l ) =
1X
1
(f , φl )n =
f (j) exp(−2πijl /n),
n
n
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
l = 0, . . . , n−1.
j=0
Fn ordnet jeder diskreten Funktion f die Amplituden der
Wellenfunktionen zu: Fn f (l ) ist der Koeffizient αl in der
Darstellung
X
f =
αl φ l .
l
Ausgleichsrechnung
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Umkehrung der Diskreten Fourier-Transformation
Es gilt für alle j
(Fn f , φj ) =
Ausgleichsrechnung
n−1
1X
n
l=0
(f , φl ), φj
n−1
1 X
=
f (r )φl (r )φj (l )
n
n−1
1 X
f (r )φr (l )φj (l )
=
n
l,r =0
l,r =0
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Umkehrung der Diskreten Fourier-Transformation
Es gilt für alle j
(Fn f , φj ) =
Ausgleichsrechnung
n−1
1X
n
l=0
(f , φl ), φj
n−1
1 X
=
f (r )φl (r )φj (l )
n
l,r =0
n−1
n−1
1X
1 X
f (r )φr (l )φj (l ) =
f (r )(φj , φr )
=
n
n
l,r =0
= f (j)
r =0
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Bemerkung
◮
√
Manchmal wird der Faktor n1 durch 1/ n ersetzt und in
√
der Rücktransformation ein Faktor 1/ n hinzugefügt.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Bemerkung
◮
◮
√
Manchmal wird der Faktor n1 durch 1/ n ersetzt und in
√
der Rücktransformation ein Faktor 1/ n hinzugefügt.
Dann stehen sich der „Originalraum“ und der
„Fourier-Raum“ vollständig symmetrisch gegenüber.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Berechnung der Diskreten Fourier-Transformation
Wir ordnen f das Polynom
pf (x) = f (n − 1)x n−1 + . . . + f (1)x + f (0)
zu.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Berechnung der Diskreten Fourier-Transformation
Wir ordnen f das Polynom
pf (x) = f (n − 1)x n−1 + . . . + f (1)x + f (0)
zu.
Dann gilt wegen exp(jr ) = exp(r )j
1
Fn f (l ) = pf (exp(−2πil /n)).
n
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Berechnung der Diskreten Fourier-Transformation
Wir ordnen f das Polynom
pf (x) = f (n − 1)x n−1 + . . . + f (1)x + f (0)
zu.
Dann gilt wegen exp(jr ) = exp(r )j
1
Fn f (l ) = pf (exp(−2πil /n)).
n
Mit ωn = exp(2πi/n) ist damit pf an den Stellen ω ln
auszuwerten.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Berechnung der Diskreten Fourier-Transformation
Wir ordnen f das Polynom
pf (x) = f (n − 1)x n−1 + . . . + f (1)x + f (0)
zu.
Dann gilt wegen exp(jr ) = exp(r )j
1
Fn f (l ) = pf (exp(−2πil /n)).
n
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Mit ωn = exp(2πi/n) ist damit pf an den Stellen ω ln
auszuwerten.
Nichtlineare Gleichungssysteme
Dies entspricht genau dem Algrithmus FFI aus dem letzten
Abschnitt.
Numerische
Integration
Interpolation
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Berechnung der Rücktransformation
Die Rücktransformation ist analog durch Auswertung eines
Polynoms an den Stellen ωnl gegeben, was der Algorithmus
FFT leistet.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Berechnung der Rücktransformation
Die Rücktransformation ist analog durch Auswertung eines
Polynoms an den Stellen ωnl gegeben, was der Algorithmus
FFT leistet.
Wir können daher Fourier-Transformation und
Rücktransformation in O(n log n) Operationen durchführen.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.4
Abklingverhalten und diskrete Cosinus-Transformation
Ist ein Datensatz
Ausgleichsrechnung
f (0), . . . , f (n − 1)
strukturlos, kann nicht komprimiert werden.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.4
Abklingverhalten und diskrete Cosinus-Transformation
Ist ein Datensatz
Ausgleichsrechnung
f (0), . . . , f (n − 1)
strukturlos, kann nicht komprimiert werden.
Stellt aber f beispielsweise die Grautöne eines
eindimensionalen Bildes dar, so wird f über weite Strecken
nur wenig variieren mit Ausnahme von einigen Kanten.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.4
Abklingverhalten und diskrete Cosinus-Transformation
Ist ein Datensatz
Ausgleichsrechnung
f (0), . . . , f (n − 1)
strukturlos, kann nicht komprimiert werden.
Stellt aber f beispielsweise die Grautöne eines
eindimensionalen Bildes dar, so wird f über weite Strecken
nur wenig variieren mit Ausnahme von einigen Kanten.
Wir bezeichnen eine solche Funktion als glatt oder stückweise
glatt.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.4
Abklingverhalten und diskrete Cosinus-Transformation
Ist ein Datensatz
Ausgleichsrechnung
f (0), . . . , f (n − 1)
strukturlos, kann nicht komprimiert werden.
Stellt aber f beispielsweise die Grautöne eines
eindimensionalen Bildes dar, so wird f über weite Strecken
nur wenig variieren mit Ausnahme von einigen Kanten.
Wir bezeichnen eine solche Funktion als glatt oder stückweise
glatt.
Bei glatten Funktionen klingen die Amplituden, die zu
Wellenfunktionen mit hoher Frequenz gehören, schneller ab
als bei nichtglatten Funktionen.
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.4
Abklingverhalten und diskrete Cosinus-Transformation
Als erste Idee für eine Bildkompression liegt es nahe, eine
Fourier-Transformation durchzuführen, jedoch nur die
langwelligen Amplituden abzuspeichern.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.4
Abklingverhalten und diskrete Cosinus-Transformation
Als erste Idee für eine Bildkompression liegt es nahe, eine
Fourier-Transformation durchzuführen, jedoch nur die
langwelligen Amplituden abzuspeichern.
Bei glatten Bildern ist eine solche Kompression mit bloßem
Auge nicht mehr sichtbar, sie wird allerdings an sehr scharfen
Kanten entlarvt, die durch die Kompression etwas
verschmiert werden.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.4
Abklingverhalten und diskrete Cosinus-Transformation
Als erste Idee für eine Bildkompression liegt es nahe, eine
Fourier-Transformation durchzuführen, jedoch nur die
langwelligen Amplituden abzuspeichern.
Bei glatten Bildern ist eine solche Kompression mit bloßem
Auge nicht mehr sichtbar, sie wird allerdings an sehr scharfen
Kanten entlarvt, die durch die Kompression etwas
verschmiert werden.
Aus diesem Grund werden in der JPEG-Kompression alle
Amplituden berücksichtigt, die höheren Frequenzen aber nur
näherungsweise abgespeichert.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beispiel
f
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beispiel
f
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
In der obigen Zeichnung sehen wir eine glatte Funktion f und
φn/2 , das ist die am schnellsten oszillierende Wellenfunktion.
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beispiel
f
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
In der obigen Zeichnung sehen wir eine glatte Funktion f und
φn/2 , das ist die am schnellsten oszillierende Wellenfunktion.
Aufgrund des glatten
Verhaltens von f heben sich die
P
Summanden in
f (j)φn/2 (j) fast gegenseitig auf.
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Beispiel
f
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Aus dem Bild geht aber auch hervor, dass die zugehörige
Amplitude noch kleiner wäre, wenn auch die auf periodisch
fortgesetzte Funktion
Z
f (j + k(n − 1)) = f (j),
glatt ist.
Z
k∈ ,
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Symmetrische Spiegelung
....
0
Ausgleichsrechnung
....
N-1
2N-1
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Um die Glattheitseigenschaften der fortgesetzten Funktion zu
verbessern, wird f durch symmetrische Spiegelung zu einer
Funktion in 2n fortgesetzt:
C
f (2n − 1 − j) = f (j),
j = 0, . . . , n − 1.
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Fourier-Transformation der fortgesetzten Funktion
◮
Verwende Fourier-Transformation auf
fortgesetzte f .
C2N für dieses
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Fourier-Transformation der fortgesetzten Funktion
◮
◮
Verwende Fourier-Transformation auf
fortgesetzte f .
C2N für dieses
Es muss möglich sein, mit n Fourier-Koeffizienten für die
exakte Darstellung von f auszukommen.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Fourier-Transformation der fortgesetzten Funktion
◮
Verwende Fourier-Transformation auf
fortgesetzte f .
C2N für dieses
◮
Es muss möglich sein, mit n Fourier-Koeffizienten für die
exakte Darstellung von f auszukommen.
◮
Ist f reellwertig, so muss auch eine reellwertige
Darstellung der Fourier-Koeffizienten erreicht werden
können.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Cosinus-Transformation
Wir verwenden daher die Cosinus-Transformation
Cn f (l ) = c(l )
n−1
X
j=0
π(2j + 1)l f (j) cos
2n
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Cosinus-Transformation
Wir verwenden daher die Cosinus-Transformation
Cn f (l ) = c(l )
n−1
X
j=0
π(2j + 1)l f (j) cos
2n
mit Rücktransformation
f (j) =
n−1
X
l=0
c(l )Cn f (l ) cos
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
π(2j + 1)l ,
2n
p
√
mit c(0) = 1/ n und c(l ) = 2/n für l 6= 0.
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Cosinus-Transformation
Denn die reellen Wellenfunktionen
π(2j + 1)l ,
ψl (j) = cos
2n
Ausgleichsrechnung
l = 0, . . . , n − 1
bilden ein Orthogonalsystem bezüglich des Produkts
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
(f , g ) =
n−1
X
j=0
f (j)g (j).
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Cosinus-Transformation
Denn die reellen Wellenfunktionen
π(2j + 1)l ,
ψl (j) = cos
2n
Ausgleichsrechnung
l = 0, . . . , n − 1
bilden ein Orthogonalsystem bezüglich des Produkts
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
(f , g ) =
n−1
X
f (j)g (j).
j=0
Klar wegen
1
ψl = (φl + φl ).
2
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Berechnung der Cosinus-Transformation
Die Cosinus-Transformation wird aus der
Fourier-Transformierten für die symmetrisch fortgesetzte
Funktion f bestimmt.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Berechnung der Cosinus-Transformation
Die Cosinus-Transformation wird aus der
Fourier-Transformierten für die symmetrisch fortgesetzte
Funktion f bestimmt.
In
2nF2n f (l ) =
2n−1
X
j=0
f (j) exp
−2πijl 2n
multiplizieren wir beide Seiten mit exp(−πil /(2n)).
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Berechnung der Cosinus-Transformation
Die Cosinus-Transformation wird aus der
Fourier-Transformierten für die symmetrisch fortgesetzte
Funktion f bestimmt.
In
2nF2n f (l ) =
2n−1
X
j=0
f (j) exp
−2πijl 2n
multiplizieren wir beide Seiten mit exp(−πil /(2n)).
Erhalte für die Koeffizienten wegen f (2n − 1 − j) = f (j):
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Berechnung der Cosinus-Transformation
exp
−πil −2πi(2n − 1 − j)l −2πijl + exp
exp
2n
2n
2n
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Berechnung der Cosinus-Transformation
exp
−πil −2πi(2n − 1 − j)l −2πijl + exp
exp
2n
2n
2n
2πi(j + 1)l −2πijl −πil + exp
exp
= exp
2n
2n
2n
−πi(2j + 1)l πi(2j + 1)l = exp
+ exp
2n
2n
π(2j + 1)l .
= 2 cos
2n
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Algorithmus
Wir erhalten damit folgenden Algorithmus für die schnelle
Cosinus-Transformation:
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Algorithmus
Wir erhalten damit folgenden Algorithmus für die schnelle
Cosinus-Transformation:
Seien f (0), . . . , f (n − 1) ∈
R gegeben.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Algorithmus
Wir erhalten damit folgenden Algorithmus für die schnelle
Cosinus-Transformation:
Seien f (0), . . . , f (n − 1) ∈
R gegeben.
1. Erweitere den Datensatz durch symmetrische Spiegelung
zu
f (0), f (1), . . . , f (n − 1), f (n − 1), . . . , f (1), f (0) ∈ 2n .
R
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Algorithmus
Wir erhalten damit folgenden Algorithmus für die schnelle
Cosinus-Transformation:
Seien f (0), . . . , f (n − 1) ∈
R gegeben.
1. Erweitere den Datensatz durch symmetrische Spiegelung
zu
f (0), f (1), . . . , f (n − 1), f (n − 1), . . . , f (1), f (0) ∈ 2n .
R
2. Wende schnelle Fourier-Interpolation FFI auf den
erweiterten Datensatz an. Erhalte
F2n f (l ),
l = 0, . . . , 2n − 1.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Algorithmus
3. Bestimme die Koeffizienten der Cosinus-Transformation
aus
Cn f (l ) =
−πil c(l )n
F2n f (l ) ∈
exp
2
2n
R,
l = 0, . . . , n − 1.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Algorithmus
3. Bestimme die Koeffizienten der Cosinus-Transformation
aus
Cn f (l ) =
−πil c(l )n
F2n f (l ) ∈
exp
2
2n
R,
l = 0, . . . , n − 1.
Die Rücktransformation erfolgt mit ganz analogen Formeln.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.5
Zweidimensionale Transformationen
Sei f ∈
Cn×n ein zweidimensionaler Datensatz,
f (j, k),
j, k = 0, . . . , n − 1.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.5
Zweidimensionale Transformationen
Sei f ∈
Cn×n ein zweidimensionaler Datensatz,
f (j, k),
j, k = 0, . . . , n − 1.
Die Wellenfunktionen
φl.m (j, k) = exp(2πi(jl +km)/n) = φl (j) φm (k),
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
l , m = 0, . . . , n−1,
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.5
Zweidimensionale Transformationen
Sei f ∈
Cn×n ein zweidimensionaler Datensatz,
f (j, k),
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
j, k = 0, . . . , n − 1.
Die Wellenfunktionen
φl.m (j, k) = exp(2πi(jl +km)/n) = φl (j) φm (k),
C
n×n
bilden ein Orthogonalsystem des
bezüglich des
Produkts
n−1
X
f (j, k) g (j, k),
(f , g )n×n =
j,k=0
Grundlagen
l , m = 0, . . . , n−1,
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.5
Zweidimensionale Transformationen
Sei f ∈
Cn×n ein zweidimensionaler Datensatz,
f (j, k),
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
j, k = 0, . . . , n − 1.
Die Wellenfunktionen
φl.m (j, k) = exp(2πi(jl +km)/n) = φl (j) φm (k),
C
n×n
bilden ein Orthogonalsystem des
bezüglich des
Produkts
n−1
X
f (j, k) g (j, k),
(f , g )n×n =
j,k=0
nämlich
(φl,m , φn,o )n×n = n2 δ(l,m),(n,o) .
Grundlagen
l , m = 0, . . . , n−1,
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Transformationen
Daraus erhalten wir die zweidimensionale
Fourier-Transformation
Fn×n f (l , m) =
n−1
1 X
f (j, k) exp(−2πi(jl + km)/n)
n2
j,k=0
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Transformationen
Daraus erhalten wir die zweidimensionale
Fourier-Transformation
Fn×n f (l , m) =
n−1
1 X
f (j, k) exp(−2πi(jl + km)/n)
n2
j,k=0
1
= 2 (f , φl,m )n×n .
n
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Transformationen
Daraus erhalten wir die zweidimensionale
Fourier-Transformation
Fn×n f (l , m) =
n−1
1 X
f (j, k) exp(−2πi(jl + km)/n)
n2
j,k=0
1
= 2 (f , φl,m )n×n .
n
Umkehrtransformation:
f (j, k) =
n−1
X
l,m=0
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Fn×n f (l , m) exp(2πi(jl + km)/n).
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Fourier-Transformationen
Aufgrund der Tensorproduktstruktur der Wellenfunktionen
und der Fourier-Transformation kommt gegenüber dem
eindimensionalen Fall nichts wirklich Neues hinzu.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Fourier-Transformationen
Aufgrund der Tensorproduktstruktur der Wellenfunktionen
und der Fourier-Transformation kommt gegenüber dem
eindimensionalen Fall nichts wirklich Neues hinzu.
Allerdings ist die Unterscheidung zwischen langen und kurzen
Wellen nicht mehr so leicht möglich ist, weil Wellen in einer
Komponente lang und in der anderen kurz sein können.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Fourier-Transformationen
Aufgrund der Tensorproduktstruktur der Wellenfunktionen
und der Fourier-Transformation kommt gegenüber dem
eindimensionalen Fall nichts wirklich Neues hinzu.
Allerdings ist die Unterscheidung zwischen langen und kurzen
Wellen nicht mehr so leicht möglich ist, weil Wellen in einer
Komponente lang und in der anderen kurz sein können.
Mit
n−1
n−1
X
1 X
f (j, k) exp(−2πijl /n)
Fn×n f (l , m) = 2
exp(−2πikm/n)
n
k=0
j=0
lässt sich die zweidimensionale Transformation auf die
eindimensionale zurückführen:
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Fourier-Transformationen
n−1
n−1
X
1 X
f (j, k) exp(−2πijl /n)
exp(−2πikm/n)
Fn×n f (l , m) = 2
n
k=0
j=0
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Fourier-Transformationen
n−1
n−1
X
1 X
f (j, k) exp(−2πijl /n)
exp(−2πikm/n)
Fn×n f (l , m) = 2
n
k=0
j=0
Wir führen zunächst für jedes k eine eindimensionale
Transformation bezüglich j durch.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Fourier-Transformationen
n−1
n−1
X
1 X
f (j, k) exp(−2πijl /n)
exp(−2πikm/n)
Fn×n f (l , m) = 2
n
k=0
j=0
Wir führen zunächst für jedes k eine eindimensionale
Transformation bezüglich j durch.
Die obige Formel zeigt, dass die auf diese Weise erhaltene
Funktion f˜(l , k) für jedes l bezüglich k transformiert werden
muss.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Fourier-Transformationen
n−1
n−1
X
1 X
f (j, k) exp(−2πijl /n)
exp(−2πikm/n)
Fn×n f (l , m) = 2
n
k=0
j=0
Wir führen zunächst für jedes k eine eindimensionale
Transformation bezüglich j durch.
Die obige Formel zeigt, dass die auf diese Weise erhaltene
Funktion f˜(l , k) für jedes l bezüglich k transformiert werden
muss.
Der Aufwand für dieses Verfahren ist damit O(n2 (log n)2 ).
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Cosinus-Transformation
Die zweidimensionale Cosinus-Transformation ist analog zum
eindimensionalen Fall durch Bildung der Tensorprodukte
definiert,
Cn×n f (l , m)
= c(l )c(m)
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
n−1
X
j,k=0
c(l ) wie oben.
π(2k + 1)m π(2j + 1)l cos
,
f (j, k) cos
2n
2n
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Zweidimensionale Cosinus-Transformation
Die zweidimensionale Cosinus-Transformation ist analog zum
eindimensionalen Fall durch Bildung der Tensorprodukte
definiert,
Cn×n f (l , m)
= c(l )c(m)
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
n−1
X
j,k=0
π(2k + 1)m π(2j + 1)l cos
,
f (j, k) cos
2n
2n
c(l ) wie oben.
Der Zusammenhang zwischen Fourier-Transformation für den
gespiegelten Datensatz und Cosinus-Transformation bleibt
der gleiche.
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.6
Bildkompression
Ein monochromes Bild ist ein Datensatz der Form
f (j, k),
j, k = 0, . . . , n − 1.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.6
Bildkompression
Ein monochromes Bild ist ein Datensatz der Form
f (j, k),
j, k = 0, . . . , n − 1.
f (j, k) ist der Grauton des Pixels (j, k).
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.6
Bildkompression
Ein monochromes Bild ist ein Datensatz der Form
f (j, k),
j, k = 0, . . . , n − 1.
f (j, k) ist der Grauton des Pixels (j, k).
Da für die Speicherung von f (j, k) jeweils ein Byte verwendet
wird, entspricht f = 0 schwarz und f = 255 weiß.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.6
Bildkompression
Ein monochromes Bild ist ein Datensatz der Form
f (j, k),
j, k = 0, . . . , n − 1.
f (j, k) ist der Grauton des Pixels (j, k).
Da für die Speicherung von f (j, k) jeweils ein Byte verwendet
wird, entspricht f = 0 schwarz und f = 255 weiß.
Zur Kompression wird das Bild zunächst in Teilbilder der
Größe 8 × 8 oder 16 × 16 aufgeteilt.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
10.6
Bildkompression
Ein monochromes Bild ist ein Datensatz der Form
f (j, k),
j, k = 0, . . . , n − 1.
f (j, k) ist der Grauton des Pixels (j, k).
Da für die Speicherung von f (j, k) jeweils ein Byte verwendet
wird, entspricht f = 0 schwarz und f = 255 weiß.
Zur Kompression wird das Bild zunächst in Teilbilder der
Größe 8 × 8 oder 16 × 16 aufgeteilt.
Da die JPEG-Kompression 8 × 8 verwendet, wollen wir hier
nur diesen Fall weiterverfolgen.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Auf jedem Teilbild wird eine Cosinus-Transformation
durchgeführt und das Ergebnis als Matrix festgehalten.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Auf jedem Teilbild wird eine Cosinus-Transformation
durchgeführt und das Ergebnis als Matrix festgehalten.
Mit Cf = C8×8 f erhalten wir
Cf (0, 0) . . . Cf (7, 0)
..
..
.
.
Cf (0, 7) . . . Cf (7, 7)
6
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
0
1
5
14 15 27
28
Grundlagen
2
4
7
3
8
12 17 25 30 41
43
Metrische und
9
11 18 24 31 40 44
53
Nichtlineare Glei-
Direkte42
Lösung
13 16 26 29
linearer Gleichungssysteme
normierte Räume
chungssysteme
10 19 23 32 39 45 52
54
Interpolation
Numerische
20 22 33 38 46 51 55
60
Integration
Theorie
21 34 37 47 50 56 59
61der Eigenwertprobleme
Numerik
35 36 48 49 57 58 62
63von
Eigenwertproblemen
JPEG-Standard
Das rechte Schema zeigt, wie die Koeffizienten auf einem
eindimensionalen Feld abgespeichert werden. Abgesehen von
Rundungsfehlern kann aus den Informationen zu diesem
Zeitpunkt das vollständige Bild rekonstruiert werden.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Das rechte Schema zeigt, wie die Koeffizienten auf einem
eindimensionalen Feld abgespeichert werden. Abgesehen von
Rundungsfehlern kann aus den Informationen zu diesem
Zeitpunkt das vollständige Bild rekonstruiert werden.
Die Kompression erfolgt nun dadurch, dass kleine und/oder
hochfrequente Komponenten in der Matrix zu Null gesetzt
oder grob gerundet werden.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Das rechte Schema zeigt, wie die Koeffizienten auf einem
eindimensionalen Feld abgespeichert werden. Abgesehen von
Rundungsfehlern kann aus den Informationen zu diesem
Zeitpunkt das vollständige Bild rekonstruiert werden.
Die Kompression erfolgt nun dadurch, dass kleine und/oder
hochfrequente Komponenten in der Matrix zu Null gesetzt
oder grob gerundet werden.
Im einfachsten Fall werden im rechten Schema nur die ersten
K Komponenten berücksichtigt, das sind in etwa die K mit
den längsten Wellenlängen.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Im JPEG-Standard wird von den Grautönen die Zahl 128
abgezogen, was allerdings nur die Komponente (0, 0) der
Cosinus-Transformation verändert.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Im JPEG-Standard wird von den Grautönen die Zahl 128
abgezogen, was allerdings nur die Komponente (0, 0) der
Cosinus-Transformation verändert.
Dann wird eine Cosinus-Transformation für n = 8
durchgeführt.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Im JPEG-Standard wird von den Grautönen die Zahl 128
abgezogen, was allerdings nur die Komponente (0, 0) der
Cosinus-Transformation verändert.
Dann wird eine Cosinus-Transformation für n = 8
durchgeführt.
Jede Komponente der obigen Matrix wird nun durch eine
Zahl geteilt, deren Größe von der zugrundeliegenden
Frequenz abhängt, aber nicht Teil des Standards ist.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Im JPEG-Standard wird von den Grautönen die Zahl 128
abgezogen, was allerdings nur die Komponente (0, 0) der
Cosinus-Transformation verändert.
Dann wird eine Cosinus-Transformation für n = 8
durchgeführt.
Jede Komponente der obigen Matrix wird nun durch eine
Zahl geteilt, deren Größe von der zugrundeliegenden
Frequenz abhängt, aber nicht Teil des Standards ist.
Anschließend werden die auf diese Weise geteilten und auf
ganze Zahlen gerundeten Einträge wie oben auf einem
eindimensionalen Feld abgespeichert.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Im JPEG-Standard wird von den Grautönen die Zahl 128
abgezogen, was allerdings nur die Komponente (0, 0) der
Cosinus-Transformation verändert.
Dann wird eine Cosinus-Transformation für n = 8
durchgeführt.
Jede Komponente der obigen Matrix wird nun durch eine
Zahl geteilt, deren Größe von der zugrundeliegenden
Frequenz abhängt, aber nicht Teil des Standards ist.
Anschließend werden die auf diese Weise geteilten und auf
ganze Zahlen gerundeten Einträge wie oben auf einem
eindimensionalen Feld abgespeichert.
Dieses Feld wird in der Regel viele kleine Zahlen enthalten
sowie am Ende lauter Nullen und kann daher erfolgreich
komprimiert werden.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Empfohlen wird als Teiler
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
16 11 10 16
24
40
51
61
12 12 14 19
26
58
60
55
14 13 16 24
40
57
69
56
Grundlagen
14 17 22 29
51
87
80
62
Direkte Lösung
linearer Gleichungssysteme
18 22 37 56
68
109 103
77
24 35 55 64
81
104 113
92
49 64 78 87 103 121 120 101
72 92 95 98 112 100 103
99
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Diese Zahlen wurden durch Experimente bestimmt. Es
können aber auch größere oder kleinere Zahlen verwendet
werden, so dass man den Grad der Komprimierung verändern
kann.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
JPEG-Standard
Diese Zahlen wurden durch Experimente bestimmt. Es
können aber auch größere oder kleinere Zahlen verwendet
werden, so dass man den Grad der Komprimierung verändern
kann.
Bei der Rücktransformation werden die abgespeicherten
Zahlen zunächst mit diesen Einträgen multipliziert,
anschließend die Rücktransformation durchgeführt.
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen
Ausgleichsrechnung
Problemstelllung
Das lineare
Ausgleichsproblem
Orthogonalisierungs
Die Pseudoinverse
einer Matrix
Das nichtlineare
Ausgleichsproblem
Grundlagen
Direkte Lösung
linearer Gleichungssysteme
Metrische und
normierte Räume
Nichtlineare Gleichungssysteme
Interpolation
Numerische
Integration
Theorie der Eigenwertprobleme
Numerik von
Eigenwertproblemen