Vorlage Diplomarbeit - Hochschule Ravensburg
Werbung

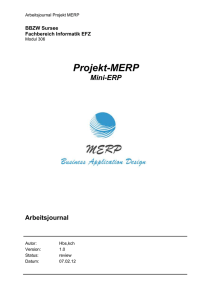
Hochschule Ravensburg-Weingarten FACHBEREICH MASCHINENBAU Prof. Dr.-Ing. Tim J. Nosper Ralf Mustermann Untersuchungen 2004 zur Schaltzeitoptimierung automatisierten Schaltgetrieben an Diplomarbeit Referent: Prof. Dr.-Ing. Tim Nosper Korreferent: Diplomarbeit eingereicht am: 2004 Fachhochschule Ravensburg -Weingarten Universit y of Applied Sciences Alle Rechte vorbehalten Vorwort Die vorliegende Arbeit entstand während meiner Tätigkeit als Diplomand bei der Mustermann AG in Ravensburg in enger Kooperation mit der Fachhochschule Ravensburg-Weingarten Besonders danke ich meinem akademischen Lehrer , Herrn Prof. Dr. -Ing. X. Y., für seine stete Unterstützung und Förderung zum Gelingen der Arbeit sowie das mir entgegengebrachte große Vertrauen. Danken möchte ich zudem allen Mitarbeitern der Abteilung XX und YY der Firma Mustermann AG, insbesondere Herrn Dr. Test, Herrn Muster, die mir bei der Durchführung der Arbeit sehr behilflich waren. Gewidmet sei diese Arbeit schließlich meinen Eltern, die mir das Studium ermöglichten,…. Weingarten, im März 2004 Ralf Mustermann Kurzfassung Kurzfassung Die vorliegende Arbeit liefert die Ergebnisse einer Untersuchung zur Schaltzeitoptimierung von automatisierten Schaltgetrieben. Die Beurteilungskriterien sind die Schaltzeit und der Schaltkom fort. Die Arbeit befasst sich zunächst mit der Anal yse des Schaltungsablaufs eines konventionellen mechanischen Definition für einer brechungszeit, die den PKW -Handschaltgetriebes Fahrer aufgrund von als ideal dauernden Messergebni ssen sowie der Zugkraftunter - sowie subjektiven Fahreindrücken gewonnen wurde. Danach werden mit Hilfe der ermittelten Rückschlüsse bezüglich des mechanischen Zugkraftunterbrechungszeit Aufbaus des automatisierten Getriebes gemacht. Die den Schaltablauf beeinflussenden Massenträg heitsmomente des Motors werden dargestellt und verschiedene Motor - und Getriebebremsen auf ihre Tauglichkeit untersucht. Im nächsten Teil der Arbeit wird ein unsynchronisiertes Getriebe im Hinblick auf die am Anfang ermittelten Schaltzeiten im Modell, am Prüfstand und im Fahrzeug untersucht, um den mechanischen Gangwechsel zu beschleunigen. Als Abschluss der Schaltzeitoptimierung Arbeit in ein werden sämtliche Simulationsmodell simulierte Schaltzeit auf ihre Zielsetzun g überprüft. Maßnahmen eingearbeitet und der die Summary Summary The present doctoral thesis shows the results of an investigation for the optimisation of the gear change time of automated gearboxes. The evaluation criteria are the shift time and the shift comfort. This thesis starts with the an al ysis of the gear change of a conventional passenger car with a traditional manual transmission. A definition of the ideal time length during gearshift where the acceleration of the vehicle is zero will be discussed. The aim of the report is to find this time length for optimum driver comfort. These measurements have been obtained using theoretical calculations and by performing subjective vehicle tests. With the results of the vehicle zero acceleration time found, conclusions may be drawn discussing the mechanical structure of the automated gearbox. The shift flow influencing moments of inertia of the engine are represented and different engine and transmission braking and their suitabilit y are examined. In the next section of the thesis, an automated ge arbox with dog clutches was examined to study the shift times in the model, the test bench and in the vehicle in order to decrease the mechanical gear change time. In the last part of the thesis all variables for the shift time optimisation are implemented into a simulation model and the simulated shift time is compared against its objective. Inhalt I Inhalt Seite 1 Einleitung 1 2 Stand der Entwicklung 2 2.1 2.2 2.3 3 3.1 3.2 3.3 3.4 3.5 3.6 4 4.1 4.2 4.3 5 5.1 5.2 5.3 6 6.1 6.2 6.3 7 7.1 7.2 7.3 7.4 Automatisierte Kupplungen und Schaltgetriebe Eigenschaften automatisierter Schaltgetriebe Steuerung automatisierter Schaltsysteme 2 2 3 Schaltgetriebe 4 Begriffsdefinition 6 Phasen eines Gangwechsels Error! Bookmark not defined. Schaltstrategien eines Handschalters Error! Bookmark not defined. Vergleichsmessungen an Handschaltgetrieben Error! Bookmark not defined. Verfahren zur Bestimmung der Schaltqualität und Schaltzeit 6 Erkenntnisse für die Steuerung automatisierter Schaltget riebeError! Bookmark not Zugkraftunterbrechungszeit 6 Schwingungsverhalten des Menschen Error! Bookmark not defined. Festlegung der optimal en Zugkraftunterbrechungszeit Error! Bookmark not defined. Maximale Zugkraftunterbrechungszeit Error! Bookmark not defined. Motor- und Getriebebremsen Herleitung der Bremsmomente Motorbremsen Getriebebremsen Unsynchronisierte Getriebe Error! Bookmark not defined. Error! Bookmark not defined. Error! Bookmark not defined. Error! Bookmark not defined. Error! Bookmark not defined. Unsynchronisierte Getriebe mit Klauenkupplungen Error! Bookmark not defined. Prinzipvers uche im Fahrzeug Error! Bookmark not defined. Einspuruntersuchungen am Prüfstand Error! Bookmark not defined. Modellbildung Aufbau von Schwingungssystemen Modellbildung des Antriebstrangs Validierung des Modells Simulationsergebnisse Error! Bookmark not defined. Error! Error! Error! Error! Bookmark Book mark Bookmark Bookmark not not not not defined. defined. defined. defined. 8 Zusammenfassung und Ausblick 6 9 Formelzeichen und Abkürzungen 7 10 Literatur 10 11 Anhang 11 Einleitung 1 1 Einleitung In Personenkraftwagen findet man heutzutage nahezu ausschließlich zwei Bauarten von Fahrzeuggetrieben: Schaltgetriebe mit fünf bis sechs Gängen und Einscheiben trockenkupplung sowie Automatikgetriebe mit Planetenrädern und Drehmomentwandler. Ein Blick auf die großen Automobilherstellerländer zeigt deutlich, wie groß die Nachfrage nach einer Automatisierung bei Fahrzeuggetrieben ist: In den USA haben bereits 90 % , in Japan 70% aller Fahrzeuge ein automatisches Getriebe. Der Marktanteil in Westeuropa stagniert bei etwas weniger als zehn Prozent. Es handelt sich dabei jedoch um Fahrzeuge mit konventionellen Automatikgetrieben und Drehmomentwandlern. In Westeuropa findet man in 60% aller Fahrzeuge der Oberklasse mit mehr als 2,5 Liter Hubraum (~ 4% der produzierten PKW) automatische Getriebe, während die Kompaktwagen und Mittelklassewagen (~ 96 % der produzierten Pkw) nur über einen Automatikanteil von weniger als 6 % verfügen [K1]. Es wird damit gerechnet, dass dieser Anteil in den nächsten fünf bis zehn Jahren deutlich ansteigen wird. Gründe für diesen Trend zur Automatisierung des Getriebes sind: • Durch Flottenverbrauch, strengere Abgasvorschriften und Geräusch - minimierungsmaßnahmen werden die Automobilhersteller zur Entwicklung eines modernen Motor - und Getriebemanagements gezwungen. • Durch die ständig zunehmende Verkehrsdichte verliert der Fahrer den „Fahrspaß“ an konventionellen Handschaltgetrieben. • Fahrzeuge mit automatischem Getriebe sind deutlich seltener an Unfällen beteiligt als von Hand geschaltete Getriebe: In Europa verfügen aber nur 10 % aller Unfallfahrzeuge über Automatikgetriebe. Stand der Entwicklung 2 2 Stand der Entwicklung Das folgende Kapitel gibt einen Überblick üb er den aktuellen Stand der Technik bezüglich der diese Arbeit betreffenden Themen. Die Literatur übersicht erhebt keinen Anspruch auf Vollständigkeit, deckt jedoch den wesentlichen Teil der Entwicklung automatisierter Kupplungen und Schaltgetriebe ab. Bei den automatisierten Getrieben werden ausschließlich Stirnradgetriebe mit Trockenkupplung betrachtet. 2.1 Automatisierte Kupplungen und Schaltgetriebe Der Wunsch nach einer Automatisierung des Kupplungs - oder Schaltvorgangs wird bereits Anfang des vergangenen Jahrhunderts geäußert [M2,N2]. Damals stand sowohl der Schutz der Getriebemechanik vor dem Fahrer sowie eine Komforterhöhung im Vordergrund. Gerade für den weniger versierten Fahrer sollte die neue Art der Getriebebetätigung eine deutliche Entlastung darstellen. 2.2 Eigenschaften automatisierter Schaltgetriebe ASG ® -S ysteme bestehen aus den Komponenten Schaltgetriebe, Kupplung, Aktuatorik, Sensorik und Steuergerät Error! Reference source not found. . Die heute auf dem Markt befin dlichen Systeme stellen fast ausschließlich sogenannte „add-on“ Lösungen dar, d.h. an ein bereits vorhandenes Schaltgetriebe wird eine Aktuatorik angebaut, die mittels Elektromotoren oder Hydraulik die bisher vom Fahrer ausgeführten Schalt - und Kupplungsvorgänge durchführen. Sämtliche Schaltabläufe werden von einem Steuergerät geregelt und überwacht. Stand der Entwicklung 3 2.3 Steuerung automatisierter Schaltsysteme Bild 2.1 zeigt die S ystemstruktur eines t ypischen ASG ® in „add-on“ Bauweise mit den einzelnen Komponenten. Man unterte ilt dabei das S ystem in die vier Hauptgruppen Sensorik, Aktuatorik, Steuerung und Aktivierung. Hauptgruppen sind dabei mit der zentralen Steuerung verbunden. Sensorik zur Gangund Drehzahlerkennung Konventionelles Getriebe Kupplung Schaltaktuatorik ECU Betätigungselement Motor-ECU, ESP, CC, EHB, Kombiinstrument Bild 2.1: S ystemstruktur t ypischer ASG ® „add-on“ Lösungen Alle Schaltgetriebe 3 4 Schaltgetriebe Kraftfahrzeuge werden heutzutage Verbrennungskraftmaschinen mit nicht nahezu ausschließlich kontinuierlicher von Verbrennung angetrieben, die entweder nach dem Diesel - oder Ottoprinzip arbeiten. Dies ist begründet in den viele n Vorteilen, die der Verbrennungsmotor gegenüber anderen Antriebsquellen besitzt: Niedriges Leistungsgewicht Hohe Energiedichte geringes Gewicht Guter Wirkungsgrad Ausgereifte Technologie Schaltgetriebe 5 Mit der maximal zur Verfügung stehenden Motorleistung P ma x und der Fahrgeschwindigkeit v erhält man die ideale und effektive Zugkraft - bzw. Leitungshyperbel. FZugkraft, ideal Pmax v (3.1) Pmax Triebstrang v (3.2) bzw. FZugkraft, effektiv Die dargestellte Zugkrafthyperbel (Bild 3.1) bezieht sich auf die theoretische Volllast-/Maximalleistung P max des Motors über den gesamten Drehzahlbereich. Die maximal übertragbare Zugkraft ist dabei durch den Kraftschlußbeiwert zwischen Reifen und Fahrbahn be grenzt. Der schraffierte Bereich unterhalb der Zugkrafthyperbel stellt somit den theoretisch nutzbaren Arbeitsbereich des Verbrennungsmotors dar, der aufgrund des begrenzten Zugkraftangebots der Verbrennungsmaschine FZugkraft, Motor P ( n) v (3.3) ohne zusätzliche Drehzahl - oder Drehmomentwandler nicht optimal genutzt werden. Zugkraft Fz Kraftschlußgrenze ideale Zugkrafthyperbel FZugkraft,ideal effektive Zugkrafthyperbel FZugkraft,effektiv Zugkraftangebot FZugkraft,Motor des Verbrennungsmotors Geschwindigkeit v Bild 3.1: Zugkrafthyperbel Schaltgetriebe 6 3.1 Begriffsdefinition 3.2 Verfahren zur Bestimmung der Schaltqualit ät und Schaltzeit Hochschaltung ai Gew i ch tu ng Rückschaltung ai Gew i ch tu ng M erk ma l M erk ma l 7 ,4 4 K 8 ,7 5 K -0 ,7 9 4 axArea 1 ,8 0 2 axArea -0 ,4 3 7 axEndabs 1 ,8 5 5 a xEndabs -1 ,1 3 3 axGoAbs -4 ,8 5 6 a x A r e a /t 4 -0 ,0 0 3 8 (a xMaxAbs/axMi nAbs) 1 ,1 4 5 axGoAbs -0 ,8 2 0 axMaxRel -1 ,7 8 6 axMaxAbs -3 ,2 6 6 axMinRel -0 ,0 9 4 8 axMaxAbs/axMi nAbs +0 ,2 2 9 ( ( r x M a x +r x M i n ) /r x A r e a ) 1 ,1 1 8 axMaxRel -0 ,1 8 8 r xMax -1 ,0 6 8 r xArea +0 ,2 3 5 r xMi n 1 ,8 9 4 ( r x M a x +r x M i n )/r x A r e a -0 ,2 6 7 r xMax Tabelle 3.1: Merkmale und Gewichtungsfaktoren zur Bestimmung der Schaltqualität 4 Zugkraftunterbrechungszeit 5 Zusammenfassung und Ausblick Die vorliegende moderner Menschen Arbeit beschäftigt automatisierter „ersetzen“ Testpersonen Schaltgetriebe. soll, Messungen sich werden des mit Da der die zunächs t Schaltablaufs Schaltzeitverkürzung Automatisierung anhand an den verschiedener Fahrzeugen mit konventionellem Handschaltgetriebe vorgenommen, um daraus Erkenntnisse bezüglich des Testpersonen Ablaufs eines vorgenommenen Gangwechsels Gangwechsel zu gewinnen. we rden Schaltqualität und Schaltzeit untersucht und bewertet. Die hinsichtlich von ihrer Schaltgetriebe 6 7 Formelzeichen und Abkürzungen Verwendete Formelzeichen Vektoren werden durch einen Pfeil über der Bezeichnung, Matrizen durch einen Balken oberhalb des Namens gekennzeichnet . Die Dimension (Zeile x Spalte) des Formelzeichens wird unter Einheit bei Vektoren und Matrizen angegeben. Ist die Dimension nicht eindeutig, so wird ( -) angegeben. Die Angabe der Einheit bezieht sich bei Vektoren und Matrizen auf ein Element. Hat ein Formelzeichen keine oder keine eindeutige Einheit, so wird (-) bzw. 1 angegeben. Formelzeichen Einheit Beschreibung a m Zahnbreite a m Zahnbreite aKlaue m Translatorische Beschleunigung Klauenkupplung cSw Nm/rad Federkonstante Seitenwellen cSchalt Nm/rad Federkonstante Klauenkupplung cT Nm/rad Federkonstante Klauenkupplung Tangential richtung di Nms/rad Relativdämpfung der Übertragungselemente dKup Nms/rad Dämpferkonstante Kupplung dn Nms/rad Absolutdämpfung der Masse -Elemente FSchalthebel N Schaltkraft am Schalthebel KKup 1 Anzahl der Reibflächen der Kupplung L m Relative Lage Schiebemuffe Kupplungskörper lRs m Radstand, Abstand Vorderachse/Hinterachse lS m Abstand Schwerpunkt/Hinterachse (x -Richtung) ISollgang 1 Übersetzung Sollgang Schaltgetriebe p (-) Einspurwahrscheinlichkeit P W Leistung r m Radius rdyn m Dynamischer Rollradius tSynchron s Synchronisationsdauer Getriebe T s Periodendauer T0 s Schaltungsbeginn vS m/s Geschwindigkeit Satellitenrad x m Weg ZKup (-) Zustandsbit der Kupplung ( offen/geschlossen) rad/s 2 Winkelbeschleunigung Triebstrang rad/s 2 Winkelbeschleunigung Fahrzeugtriebstrang rad Fahrbahnneigung rad Hinterschnittwinkel der Klauenkupplung Δ rad Relative Verdrehwinkel A kgm 2 Massenträgheitsmoment Antriebsrad Differential z kgm 2 Massenträgheitsmoment um z -Achse (-) Schubstangenverhältnis 1 Gleitreibungszahl i 1 Kraftschlußbeanspruchung rad Absolutwinkelkoordinate rad Phasenverschiebung S rad/s Winkelgeschwindigkeit Satellitenrad S m rad/s Winkelgeschwindigkeit Schiebemuffe S w rad/s Winkelgeschwindigkeit Seitenwelle 8 Schaltgetriebe Abkürzungen ASG ® Automatisiertes Schaltgetriebe ATZ Automobiltechnische Zeitschrift BMW Bayrische Motorenwerke CAN Control Area Network CC Cruise Control CVT Continuous Variable Transmission DIN Deutsche Industrie Norm ECU Electronic Control Unit EHB Elektrohydraulisches Bremssystem EKS Elektronisches Kupplungssystem EPS Elektro-Pneumatische Schaltung ESP Elektronisches Stabilitätsprogramm FIA Federation International Automobile GKS Ganzkörperschwingungen HAG Hinterachsgetriebe HiL Hardware in the Loop Hz Hertz ISO International Organization of Standardization M BMW M GmbH NEFZ Neuer euro päischer Fahrz yklus Nfz Nutzfahrzeug PDK Porsche Doppelkupplung Pkw Personenkraftwagen SMG Sequentielles M Getriebe TKS Teilkörperschwingungen VDI Verein deutscher Ingenieure VTG Variable Turbinengeometrie VW Volkswagen 9 Literatur 7 10 Literatur [A1] Aigner, J.: Zur zuverlässigen Bewertung von Fahrzeugen. ATZ, Bd. 84 (1982), Nr. 19, S. 447 -450 B1 Becker, C-P.: In die Gänge gekommen. auto, motor & sport (1995) Heft 7, S. 98-100 B2 Bartsch, C.: Das sequentielle Schaltgetriebe von BMW. Krafthand, Band 69 (1996) Heft 24, S. 1648 -1650 C1 Ciferrti, L.: Schalten wie Schumi. Automobil Revue. Heft 34, S.23, (1996) [D1] Dupius, H., Hartung, E.: Vergleich regelloser Schwingungen mit sinusförmigen Schwingungen hinsichtlich der Einwirkung auf den Menschen. Ergonomics 15 , S. 257-265, (1972) [G1] Gebert, J.: Adaptive Parametervariation bei Getriebesteuerungen zur Optimierung des Schaltkomforts. VDI Verlag, (2000) [H1] Hafner, K.E., Maas, H.: Theorie der Triebwerksschwingung der Verbrennungskraftmaschine. Wien, New York: Sp ringer Verlag, (1984) K1 Krieg, M.: ECOTRONIC – Das Stufenlosgetriebe von ZF. VDI -Bericht 1170 (1994) S. 153 ff K2 Koch, W., Salay, K.: EUROTRONIC eine neues Getriebe für schwere Nutzfahrzeuge. VDI-Berichte 1341 (1997) S. 117 -135 N1 N.N.: Triebstrangautomatisierung. Krafthand, Band 71 (1998) Heft 11, S. 42-45 N2 N.N.: Betätigung von Kupplung und Getriebe durch Saugluft. Das Auto, Band 16 (1928) Nr.22, S. 607 W1 Westendorf H.: EKS – Das elektronische Kupplungssystem von Fichtel & Sachs. VDI-Bericht 878 (1991) S. 117 -135 Z1 Zimmer, M.: Automatische Betätigung von Kraftfahrzeug -Kupplungen unter Anwendung der Fuzz y Logik am Beispiel eines Hybridantriebs. Technical report, VDI-Fortschrittberichte, Reihe 12, Nr. 194, Düsseldorf, 1993 Schriftenreihe 8 11 Anhang Inhaltsverzeichnis Seite A B C D E F G H I J K Fahrzeug und Getriebedaten Berechnung der S ynchronisationsdauer t s y n c h Ersatzträgheitsmomente Kräfteberechnung Zahn auf Zahn Position Berechnung der maximalen Spannung an der Klauenkupplung Messignale und Signalgüte der Fahrzeugmessungen Technische Daten Prüfstand Ersatzträgheitsmomente am Differentialgetriebe Schlupf am Reifen Kupplungsmoment beim Haften Simulationsmodell A Fahrzeug und Getriebed aten 208 210 212 215 217 218 219 222 224 225 226 Tabelle 8.1 zeigt die Übersetzungsverhältnisse mit und ohne Konstante sowie die Zähnezahl des verwendeten Getriebes. Übersetzungsverhältnisse des Getriebes: Übersetzungsverhältnis Übersetzungsverhältnis ( Ga n gp a ar u n g o h ne Ko n st a nte) (Ga n gp a ar u n g mi t Ko ns t an te) 1 3,214 4,459 45/14 2 1,885 2,614 49/26 3 1,242 1,723 41/33 4 0,897 1,245 35/39 5 1 1 - 6 0.604 0,838 29/48 R 2,929 4,062 41/14 Konstante 1,387 43/31 Gang Tabelle 8.1: Übersetzungsverhältnisse Prüfgetriebe Zähnezahl Schriftenreihe Berechnung der Synchronisationsdauer t s y n c h Winkelgeschwindigkeit [s-1] B 12 1 Start Motor Getriebeeingang Mot 2 Kup tSynch Zeit t [s] Bild 8.1: Begriffsdefinition Winkelgeschwindigkeiten Nach dem Drallsatz für den Abtrieb gilt: TKup Fzg TK u p r e d F z g K u p (8.1) Aufgrund der konstant en Fahrzeugbeschleunigung nach Bild 3.29 gilt weiter: TK u p r e d F z g K u p ts yn ch (8.2)