R - Kfki
Werbung

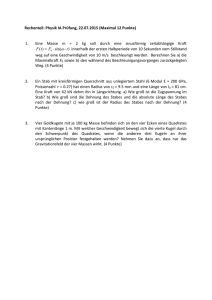
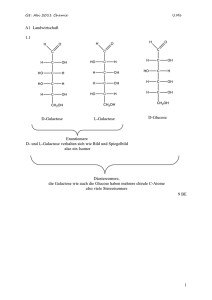
Biomechanik (1/2) ____KAD 2007.02.19 Einleitung • • • • • • Mechanische Grundbegriffe Newtonsche Axiome Formstabilität Schwehrpunkt Ein- und zweiarmiger Hebel Belastungen 2 a(t) Frage x(t) Körper 3 4 Newtonsche Axiome • Das erste Gesetz ist das Trägheitsprinzip. Es gilt nur in Inertialsystemen „Ein Körper verharrt im Zustand der Ruhe oder der gleichförmigen Translation, sofern er nicht durch einwirkende Kräfte zur Änderung seines Zustands gezwungen wird.“ • Das zweite newtonsche Gesetz ist das Grundgesetz der Dynamik „Die Änderung der Bewegung einer Masse ist der Einwirkung der bewegenden Kraft proportional und geschieht nach der Richtung derjenigen geraden Linie, nach welcher jene Kraft wirkt.“ ein Spezialfall , • , • Das dritte Prinzip ist das Wechselwirkungsprinzip „Kräfte treten immer paarweise auf. Übt ein Körper A auf einen anderen Körper B eine Kraft aus (actio), so wirkt eine gleichgroße, aber entgegen gerichtete Kraft von Körper B auf Körper A (reactio).“ • Prinzip der ungestörten Überlagerung oder Superpositionsprinzip der Mechanik „Wirken auf einen Punkt (oder einen starren Körper) mehrere Kräfte , so addieren sich diese vektoriell zu einer resultierenden Kraft auf.“ • 5 Die Biomechanik befasst sich mit Funktionen und Strukturen von Bewegungsapparat und Bewegungen von biologischen Systemen. Themen • • • • • Formstabilität Stehen, Standfestigkeit Bewegungen Mechanische Beanspruchungen Mechanische Eigenschaften von einigen biologischen Stoffen (1) (2) Wiederholung: (Skalargrössen) Leistung, Energie, Arbeit (Vektorgrössen) Kraft, Drehmoment (=Kraft mal Kraftarm) starrer Körper: ein System von Massenpunkten deren Abstände voneninander zeitlich unverändert bleiben (keine Deformation) 6 Formstabilität Gravitation (Körpergewicht, Last) Bewegungen Kräfte aus der Aussenwelt, Belastung Knochen, Skelett für die Formstabilität • Knochenanteil im Körper • Aufbau des Skeletts • Knochenstruktur 7 Vergleich des Skeletts von einigen Tieren Lemming Nilpferd Knochenanteil bei verschiedenen Tieren % der Körpermasse 30 25 20 15 10 5 0 Spitzmaus Katze Hund Mensch 8 Nilpferd Elephant Erklärung des wachsenden Knochenanteils Änderungen der linearen, quadratischen und kubischen Größen bei einem einfachen Körper, z.B. Kugel: entsprechende biol. Grösse z.B. r 1 2 Zunahme: 2fach Körperhöhe A 4 r 2 12 50 4fach Querschnitt des Knochens 4 r 3 4 3 34 8fach Körpermasse V 9 Stehen — mechanisches Gleichgewicht Im mechanischen Gleichgewicht addieren sich alle Kräfte und Drehmomente zu Null: F 0 und M 0 Kräftegleichgewicht und Drehmoment-Gleichgewicht Gleichgewichtstypen: stabil labil indifferent 10 Schwerpunkt Schwerpunkt ist der Punkt, in dem der Körper unterstützt werden muss, damit er in jeder Position im Gleichgewicht bleibt. (Bei homogenen Körper: geometrischer Mittelpunkt.) Der Schwerpunkt S muss so zwischen m1 und m2 liegen, dass m1gr1 = m2g r2 ist Der Schwerpunkt ist der Angriffspunkt der Schwerkraft: 11 Gleichgewicht bei Verdrehung Gleichgewicht: Die Wirkungslinie der Schwerkraft geht durch die Unterstützungsfläche: Der Schwerpunkt fällt, wenn er nicht über der Unterstützungsfläche liegt. 12 Schwerpunkt des Menschen Der Mensch kann seinen Schwerpunkt ausserhalb des Körpers verlagern. 13 Schwerpunktsatz Der Schwerpunkt eines Körpers bewegt sich so, als ob die Gesamtmasse im Schwerpunkt vereinigt wäre und die Summe aller äusseren Kräfte dort angreifen würde. Beispiel: Hochsprung: Fosbury Flop Schwerpunkt bewegt sich unter der Latte (geringere Hubarbeit) 14 Gleichgewicht bei Verdrehung. Standfestigkeit Je grösser die Unterstützungsfläche ist, desto stabiler ist das Gleichgewicht. 3 Füße +1 15 Einteilung der Vierfüßler Im Durchschnitt die größte Unterstützungsfläche! • • • • • • LH-LV-RH-RV LH-LV-RV-RH LH-RH-LV-RV LH-RH-RV-LV LH-RV-LV-RH LH-RV-RH-LV „vorderlastig” Rind, Pferd, ... „hinterlastig” Bär, Känguruh, Eichhorn, ... 16 Hebelfunktion: einarmiger Hebel F G Last und Kraft greifen auf der gleichen Seite des Drehpunkts an. rL rK F rK Kraftarm ist länger als Lastarm. → F < G Kraftarm ist kürzer als Lastarm. → F > G G rL Hebelgesetz (beim Gleichgewicht): M 0, G rL F rK 17 Zweiarmiger Hebel Hebelgesetz (beim Gleichgewicht): M 0, rL G rK F G rL F rK Last und Kraft liegen auf entgegengesetzten Seiten des Drehpunkts. Last und Kraft sind gleichgerichtet. 18 Fortbewegung • Muskel — „aktive” Feder, Krafterzeugung • Sehne — Feder, Übertragung der Kräfte auf Knochen • Skelett — Bewirkung der Bewegung des Körper(teil)s 19 Der Arm (Ellenbogengelenk) als einarmiger Hebel Modell Bizeps bei senkrecht angreifender Kraft Oberarm Unterarm FB FB r B = G r L rB (Kraftarm) rL G (Lastarm) 20 FB rB = G rL Modell Bizeps bei nicht senkrecht angreifender Kraft FB* rB* = G rL FB < FB* FB = FB* sina FB a FB* r B* rB G rL 21 Der Arm (Ellenbogengelenk) als zweiarmiger Hebel Modell Trizeps bei senkrecht angreifender Kraft FT rT = G rL FT G rL rT 22 Beispiele (a) F 100 N 100 N 340 mm FB 34 mm FB 1000 N < G (b) F 100 N 100 N 340 mm FT 21mm FT 1619 N 23 Wirkungsgrad der Bewegungen von Tieren Energieaufwand der Fortbewegung (kJ/(kg km) 1000 Maus 100 Ratte Biene Heuschrecke 10 Hase Papagei Auto Taube Lachs 0,01 Hubschrauber Hund Schaf Kuh Möwe 1 0,0001 Grösser, desto effektiver 1 Mensch Pferd 100 Körpermasse (kg) 10000 Flugzeug 1000000 24 Andere Bewegungen im Körper: Bewegungen bei Atmung Herztätigkeit Blutströmung ... Belastung • • • • Belastungsdiagramm: z. B. Bewegungen mechanische Beanspruchung von Geweben Deformation Deformationen 25 Mechanische Belastungen auf den Bewegungsapparat Bewegung, Krafteinwirkung Deformation Beanspruchungstypen: Biegung Torsion Kompression unbelastet Scherung Dehnung - Stauchung Torsion (Windung) 26 Deformationen (einfacher zu lernen) • Es gäbe ein Körper bei gleichgewicht M 0, F 0 und M 0 aber wirken allegemeine Kräfte und Drehmomente FScherung G rL F rK MBiegung MTorsion FDehnung F M 27 Belastungen und Wirkungen 28 Bereiche des Belastungsdiagrammes Belastung Bruch (Riß) Plastischer Bereich (irreversibel) Elastischer Bereich (reversibel) Deformation 29 Dehnung — Stauchung Dehnung (Stauchung): , A F 0 Zugspannung (Druckspannung): F F , A N 2 Pa m 30 Dehnung — Stauchung: Hookesches Gesetz E F E A E: Elastizitätsmodul (Youngsches Modul), [E] = Pa Zug Dehnung Gültigkeitsbereich für das Hooksche Gesetz (innerhalb des elastischen Bereiches) Druck Stauchung 31 Dehnung — Stauchung: Elastizitätsmodul E2 E2 E1 E1 E E — „Widerstand” gegen Dehnung oder Stauchung Stoff E (MPa) Stoff E (MPa) Stahl 200 000 Knochen 10 000 Gold 78 000 Kollagen 1 500 Glas 50 000 Bandscheibe 5 Gummi 1 Elastin 0,5 „Elastisch” in der Umgangssprache bedeutet: — breiteren elastischen Bereich, — kleineres E vgl: Kompressibilitätsmodul = 1/Kompressibilität Widerstand = 1/Leitfähigkeit 32 Biegung Dehnung „Biegung = Dehnung + Stauchung” neutrale Fläche Stauchung — Formfaktor s F 1 l3 s F 3E R R1 R2 R 4 4 4 für volle Stange R24 R14 für Röhre 33 34 Fragen, Bemerkungen, Kommentare?…