Elektromotor
Werbung

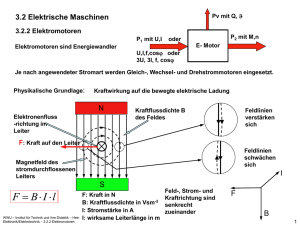
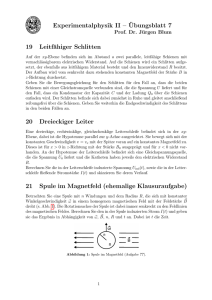
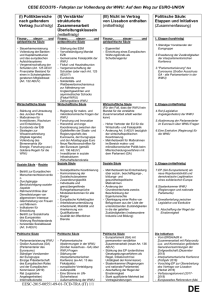
Pv mit Q, 3.2 Elektrische Maschinen 3.2.2 Elektromotoren P1 mit U,I P2 mit M,n oder Elektromotoren sind Energiewandler E- Motor U,I,f,cos oder 3U, 3I, f, cos Je nach angewendeter Stromart werden Gleich-, Wechsel- und Drehstrommotoren eingesetzt. Physikalische Grundlage: Kraftwirkung auf die bewegte elektrische Ladung N Elektronenfluss -richtung im Leiter Kraftflussdichte B des Feldes Feldlinien verstärken sich F: Kraft auf den Leiter Feldlinien schwächen sich Magnetfeld des stromdurchflossenen Leiters I S F B I l WWU – Institut für Technik und ihre Didaktik – Hein Elektronik/Elektrotechnik – 3.2.2 Elektromotoren Feld-, Strom- und F: Kraft in N Kraftrichtung sind B: Kraftflussdichte in Vsm-2 senkrecht I: Stromstärke in A zueinander l: wirksame Leiterlänge in m F B 1 Klemmenkasten Aufbau des Gleichstrommotors Ständer und Ständerfeld Kühlrippen Ständer aus Eisen Wicklungsköpfe N Polschuhe neutrale Zone Ständerwicklung S Ständer oder Stator eines Gleichstrommotors, die Polschuhe und Wicklungen liegen im Vergleich zum Schema um 90° verdreht im Gehäuse. Ständerwicklung wird mit Gleichstrom gespeist Eigenschaften von Feldlinien: Ständermagnetfeld entsteht •treten senkrecht aus Oberflächen aus und ein, Nord- und Südpol bilden sich aus •verlaufen, wenn möglich, parallel zueinander, Senkrecht zur Feldrichtung liegt die neutrale Zone •bilden im Ständer einen geschlossenen Kreis. WWU – Institut für Technik und ihre Didaktik – Hein Elektronik/Elektrotechnik – 3.2.2 Elektromotoren 2 Entstehung des Drehmoments in einer Leiterschleife Leiterschleife ist drehbar gelagert und liegt in der neutralen Zone Leiterschleife wird mit Gleichstrom gespeist N Leiterschleife bildet ein eigenes Magnetfeld mit Nord- und Südpol aus N S N neutrale Zone S S Erklärung des Drehmoments: gleiche Pole stossen sich ab Leiterschleife dreht sich entgegen dem Uhrzeiger Feldlinien auf den gleichen Seiten der Leiterschleife verstärken bzw. schwächen sich. Das Drehmoment hält an, die Leiterschleife dreht sich weiter. Die Leiterschleife hat ihre Mittellage erreicht. Das Drehmoment besteht weiter. Die Feldlinien schwächen und verstärken sich auf beiden Seiten der Leiterschleife in gleichem Maße Die Leiterschleife dreht sich weiter, bis sich Nord- und Südpol von Ständer und Leiterschleife gegenüberstehen. Dann entsteht kein Drehmoment mehr. Die technische Zielstellung besteht darin, die Drehbewegung bei Erhaltung des Drehmoments kontinuierlich fortzusetzen. WWU – Institut für Technik und ihre Didaktik – Hein Elektronik/Elektrotechnik – 3.2.2 Elektromotoren 3 Der Läufer (Rotor) Eine vollständig rotierende Leiterschleife nennt man Läufer oder Rotor. Beim wirklichen Motor besteht der Läufer aus mehreren Läuferwicklungen, die auf einen Eisenkern gewickelt sind. Kugellager Kollektor mit Lammellen Läuferwelle Fixierung der Wicklungsköpfe und Befestigungen an den Lammellen (Garnumwicklung) Läuferwicklungen (Wicklungsköpfe) Blechpaket mit Nuten für die Wicklungen Die Läuferwicklungen werden über die Lammellen des Kollektors und über Kohlebürsten mit dem Läuferstrom gespeist. Bei der Rotation des Läufers werden seine Wicklungen ständig so mit Strom gespeist, dass das Magnetfeld des Läufers stets quer zum Magnetfeld des Ständers liegt. Bei dieser Anordnung erzeugt der Motor das größte Drehmoment. WWU – Institut für Technik und ihre Didaktik – Hein Elektronik/Elektrotechnik – 3.2.2 Elektromotoren 4 Aufbau der Läuferwicklung Oberseite der Wicklung Trommelankerwicklung mit 6 Spulen Unterseite der Wicklung Aufbau der Läuferwicklung im abgewickelter Darstellung 6 2 1 4 3 6 5 Fluss des Läuferstroms über die Lammellen 1 und 4, Entstehung der Pole Fluss des Läuferstroms über die Lammellen 2 und 5, Verschiebung der Pole nach rechts N N N S S S Fluss des Läuferstroms über die Lammellen 3 und 6, Verschiebung der Pole nach rechts Der Läufer hat eine halbe Umdrehung gemacht. 1 2 Zufuhr des Läuferstroms über Kohlebürsten + WWU – Institut für Technik und ihre Didaktik – Hein Elektronik/Elektrotechnik – 3.2.2 Elektromotoren 3 4 5 UL _ UL _ UL _ + + 6 Kollektorlammellen in abgewickelter Darstellung Mit der Drehung des Läufers verdreht sich auch das Läuferfeld. In Beziehung zum Ständer ändert es seine Lage jedoch nicht! 5 Wirkungsweise der Maschine – Zusammenwirken von Ständer- und Läuferfeld Ständer mit Feld Läufer mit Feld N N S neutrale Zone S Beim Betrieb der Maschine stehen beide Magnetfelder in Wechselwirkung miteinander. Sie bilden ein Gesamtfeld WWU – Institut für Technik und ihre Didaktik – Hein Elektronik/Elektrotechnik – 3.2.2 Elektromotoren Mit der vorangegangenen Darstellung wurde gezeigt, dass die Läuferwicklung so ausgeführt ist, dass auf der einen Seite des Läufers ein Nordpol und auf der anderen Seite ein Südpol entsteht. Die Läuferwicklung führt in der neutralen Zone keinen Strom weil die Kohlebürsten beim Übergang von einer Kollektorlammelle zur nächsten jeweils die benachbarten Lamellen kurz schließen. 6 Das resultierende Magnetfeld Das Ständer und das Läufermagnetfeld mussen senkrecht zueinander stehen. Deshalb wird das Läuferfeld auch Ankerquerfeld genannt. N Beide Magnetfelder können nicht unabhängig voneinander existieren. Sie bilden das resultierende Feld. Das resultierende Feld durchsetzt den Läufer nicht mehr senkrecht, sondern schräg. Es verschiebt die Pole des Ständers und Läufers. N Damit verschiebt sich die neutrale Zone. S S Je mehr der Motor belastet wird, desto größer wird der Läuferstrom. Dadurch verschiebt sich mit der Belastung die neutrale Zone. Zur Kompensation können in den Ständer Wicklungen eingebaut werden, die eine gegenteilige Wirkung haben, die Wendepole. WWU – Institut für Technik und ihre Didaktik – Hein Elektronik/Elektrotechnik – 3.2.2 Elektromotoren Die Folge ist, dass auch die Kohlebürsten zur Zuleitung des Läuferstromes in die neutrale Zone gedreht werden müssen. Bürstenbrücke Kohlebürsten mit Andruckfeder Bürstenhalter Kollektorlammellen 7 Betriebsarten von Gleichstrommotoren Je nach Schaltung von Ständer- und Läuferwicklung können die Maschinen als Reihen- oder Nebenschlussmotoren betrieben werden. Dadurch unterscheiden sie sich in ihrem Betriebsverhalten erheblich. Reihenschlussmotor Nebenschlussmotor Ständerwicklung U IS= IL U0 M Läuferwicklung mit Kollektor und Kohlebürsten U IS M IL U0 Wenn der Läufer im Magnetfeld des Ständers rotiert, dann entsteht in der Läuferwicklung eine Induktionsspannung U0. Die Induktionsspannung muss ihrer Ursache, also der Betriebsspannung U, entgegengerichtet sein. Sie wirkt wie ein Widerstand und begrenzt den Läuferstrom IL. U U0 I RL I IS IL IS U U0 RL Je größer die Belastung M des Motors, desto geringer die Drehzahl n, desto kleiner die Induktionsspannung U0, desto größer der Läuferstrom IL. WWU – Institut für Technik und ihre Didaktik – Hein Elektronik/Elektrotechnik – 3.2.2 Elektromotoren U: Betriebsspannung; I: Gesamtstrom; IL:Läuferstrom; IS: Ständerstrom; U0: Induzierte Läuferspannung; RL: Ohmscher Widerstand des Läufers 8 Betriebsverhalten: n n I M M I n f (M ) I f (M ) M M Bei Betrieb von Elektromotoren ist die Betriebsspannung U konstant. Die Belastung des Motors entsteht durch das abgegebene Drehmoment M. Je nach Schaltungsart verhält sich die Drehzahl n des Motors verschieden. Mit wachsendem Drehmoment M nimmt die Drehzahl n ab und die induzierte Gegenspannung U0 wird kleiner. Folglich muss die Gesamtstromstärke I des Motors steigen. Der Reihenschlussmotor entwickelt bei niedrigen Drehzahlen sein größtes Drehmoment. Bei geringer Belastung kann seine Drehzahl bis zur Selbstzerstörung ansteigen. Er geht durch. Anwendung findet er als Antriebsmotor in Fahrzeugen und Elektrowerkzeugen. WWU – Institut für Technik und ihre Didaktik – Hein Elektronik/Elektrotechnik – 3.2.2 Elektromotoren Der Nebenschlussmotor zeigt eine von der Belastung nahezu unabhängige Drehzahl. Der Motor kann dann durchgehen, wenn die Erregerwicklung unterbrochen wird. Anwendung findet der Motor dort, wo konstante Drehzahlen wichtig sind, bei Förder- und Hebezeugen. 9 Anwendung des Reihenschlussmotors bei Wechselstrom – der Universalmotor Bei Betrieb mit Wechselstrom ändert sich die Richtung der Magnetfelder in Ständer und Läufer zeitgleich. Dadurch ändert sich die Richtung des erzeugten Drehmomentes nicht. M Die Auslegung für Wechselstrombetrieb erfordert einen geblechten Eisenkern des Ständers. Dadurch werden wie beim Transformator die Wirbelströme gering gehalten. Der Eisenkern des Läufers ist zur Unterdrückung der Wirbelstromverluste in jedem Fall geblecht ausgeführt. Der Universalmotor hat bei Wechselstrombetrieb eine etwas geringere Leistung als bei Gleichstrombetrieb und auch einen kleineren Wirkungsgrad. Ursache sind die vom Transformator bereits bekannten induktiven Blindwiderstände, die die aufgenommene Stromstärke verringern und die Eisenverluste im Ständerblechpaket. WWU – Institut für Technik und ihre Didaktik – Hein Elektronik/Elektrotechnik – 3.2.2 Elektromotoren 10 Gleichstromgeneratoren Gleichstrommotoren können auch als Generatoren verwendet werden. Dabei Ändert sich die Energieflussrichtung. Pv mit Q, P2 mit M,n P1 mit U,I E- Motor Pv mit Q, P2 mit U,I P1 mit M,n Generator Gedankenexperiment: Eine mit einem Gleichstrommotor angetriebene Straßenbahn durchfährt eine Ebene. Der Motor wird mit der Betriebsspannung U und der Betriebsstromstärke IB aus dem Fahrleitungsnetz versorgt. Die aufgenommene Stromstärke I wir durch die im Läufer induzierte Gegenspannung U0 begrenzt. Die Bahn beginnt eine Talfahrt, wobei sie einen Hang hinabrollt und ihre Geschwindigkeit erhöht. Die Motordrehzahl n die Gegenspannung U0 steigen, bis U0 den Betrag der Betriebsspannung U erreicht hat. Die Bahn rollt ohne Stromaufnahme den Hang hinab. Der Hang wird steiler, die Geschwindigkeit erhöht sich, mit ihre die Motordrehzahl. Die Folge ist, dass die induzierte Gegenspannung U0 größer wird als die Betriebsspannung U. Der Motor ist zum Generator geworden und speist jetzt Strom in das Fahrleitungsnetz ein. WWU – Institut für Technik und ihre Didaktik – Hein Elektronik/Elektrotechnik – 3.2.2 Elektromotoren 11