2.5.2 Zentraler, elastischer Stoß
Werbung

2 Mechanik
Spezialfälle
a.)
m1 = m2
1
⇒ ~v ′ = (~v1 + ~v2 )
2
(2.140)
(2.141)
b.)
v2 = −v1
m1 − m2
~v1
⇒ ~v ′ =
m1 + m2
(2.142)
(2.143)
c.)
m1 = m2 , v2 = −v1
⇒ ~v ′ = 0
m21
⇒ ∆E =
(2~v1 )2 = m1 v12
2(2m1 )
1
1
⇔ ∆E = m1~v12 + m2~v22
2
2
(2.144)
(2.145)
(2.146)
(2.147)
Die gesamte kinetische Energie ist in Verformungsenergie übergegangen.
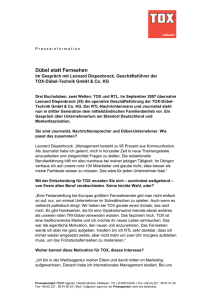
2.5.2 Zentraler, elastischer Stoß
Abbildung 2.19: Zentraler, elastischer Stoß.
Impulserhaltung:
m1~v1 + m2~v2 = m1~v1′ + m2~v2′
⇔ m1 (~v1 − ~v1′ ) = m2 (~v2 − ~v2′ )
34
(2.148)
(2.149)
2.5 Stoßprozesse
Energieerhaltung:
1
1
1
1
2
2
m1~v12 + m2~v22 = m1~v1′ + m2~v2′
2
2 2 2 2 2
2
2
′
⇔ m1 ~v1 − ~v1 = m2 ~v2 − ~v2′
(2.150)
(2.151)
Division von (2.151)/(2.149) ergibt:
(~v2′2 − ~v22 )
(~v12 − ~v1′2 )
=
(~v1 − ~v1′ )
(~v2′ − ~v2 )
(~v1 − ~v1′ )(~v1 + ~v1′ )
(~v2′ − ~v2 )(~v2′ + ~v2 )
⇔
=
(~v1 − ~v1′ )
(~v2′ − ~v2 )
⇔ ~v1 + ~v1′ = ~v2 + ~v2′
(2.152)
(2.153)
(2.154)
Eliminieren von ~v1′ oder ~v2′ aus (2.149)
~v1′ = ~v2′ + ~v2 − ~v1
⇒ m1 (~v1 − ~v2′ − ~v2 + ~v1 ) = m2~v2′ − m2~v2
⇔ 2m1 v1 − m1~v2′ − m1~v2 = m2~v2′ − m2~v2
⇔ (m1 + m2 )~v2′ = 2m1~v1 + (m2 − m1 )~v2
2m1~v1 + (m2 − m1 )~v2
⇔ ~v2′ =
m1 + m2
(2.155)
(2.156)
(2.157)
(2.158)
(2.159)
analog:
~v1′ =
2m2~v2 + (m1 − m2 )~v1
m1 + m2
(2.160)
Spezialfälle:
a.)
m1 = m2 , ~v2 = 0
⇒ ~v1′ = 0 und ~v2′ = ~v1
(2.161)
(2.162)
35
2 Mechanik
b.)
m1 ≫ m2 , ~v2 = 0
⇒ ~v1′ ≈ ~v1 und ~v2′ ≈ 2~v1
(2.163)
(2.164)
c.)
m1 ≪ m2 ,
~v2 = 0
⇒ ~v1′ ≈ −~v1 und ~v2′ ≈
(2.165)
2m1
≈0
m1 + m2
(2.166)
d.)
m1 = m2 , ~v2 = −~v1
⇒ ~v1′ = ~v2 und ~v2′ = ~v1
⇔ ~v1′ = −~v1 und ~v2′ = −~v2
(2.167)
(2.168)
(2.169)
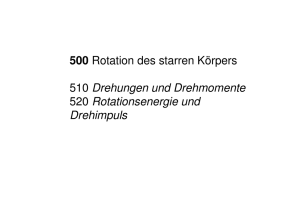
2.5.3 Schiefer, zentraler, elastischer Stoß
Abbildung 2.20: Schiefer, zentraler, elastischer Stoß.
Impulserhaltung gilt für alle Komponenten getrennt.
Impulserhaltung:
′
′
x-Komponente: m1 v1x + m2 v2x = m1 v1x
+ m2 v2x
′
′
y-Komponente: m1 v1y + m2 v2y = m1 v1y
+ m2 v2y
(2.170)
(2.171)
Energieerhaltung:
1
1
1
1
2
2
2
2
′2
′2
′2
′2
m1 v1x
+ v1y
+ v2y
+ v1y
+ v2y
+ m2 v2x
= m1 v1x
+ m2 v2x
2
2
2
2
36
(2.172)
2.5 Stoßprozesse
Lösung des Gleichungssystems:
Körper 1, Masse m1
′
v1x
= v1x
2m2 v2y + (m1 − m2 )v1y
′
v1y
=
m1 + m2
(2.173)
(2.174)
Körper 2, Masse m2
′
v2x
= v2x
2m1 v1y + (m2 − m1 )v2y
′
v2y
=
m1 + m2
(2.175)
(2.176)
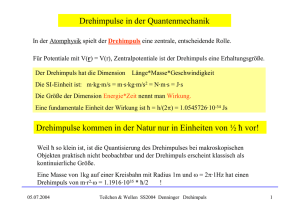
Abbildung 2.21: Klassifikation der Stoßprozesse.
37
2 Mechanik
~
2.6 Drehimpuls L
Genau wie der Impuls p~ die (Translations-)Bewegungsgröße eines Körpers ist, ist der
~ die (Rotations-)Bewegungsgröße eines Körpers:
Drehimpuls L
Definition:
~ = ~r × p~
L
~
L ist ein axialer Vektor dessen Richtung den Drehsinn definiert (wie ω
~ bei der Kreisbewegung).
Abbildung 2.22: Vektoren des Drehimpulses.
2.6.1 Kreisbewegung
~ = ~r × p~
L
~ = ~r × m~v , (~v = ω
⇔L
~ × ~r)
~ = ~r × m(~ω × ~r)
⇔L
~ = m~r × (~ω × ~r)
⇔L
~ = m((~r~r)~ω − (~rω
⇔L
~ ) ~r)
|{z}
~ = mr2 ω
⇔L
~
(2.177)
(2.178)
(2.179)
(2.180)
(2.181)
=0,~
r ⊥~
ω
(2.182)
2.6.2 Drehimpulserhaltung
Analog zum Impulserhaltungssatz. Der Gesamtdrehimpuls eines Systems aus N Massepunkten bleibt erhalten.
~ =
L
N
X
i=1
38
~ i = konst.
L
(2.183)
~
2.6 Drehimpuls L
Aus dem 2. Newtonschen Axiom folgt, dass eine Kraft F~ aufgewendet werden muß um den
Impuls p~ zu ändern.
d~p
F~ =
dt
(2.184)
analoges gilt für den Drehimpuls.
2.6.3 Drehmoment
~ aufgewendet werden.
Um den Drehimpuls zu ändern muss ein Drehmoment M
~
~ = dL
M
dt
(2.185)
einsetzen:
~
~ = dL = d (~r × p~)
M
dt
dt
d~
r
d~p
~ =
⇔M
×~p +~r ×
dt
dt
|{z}
|{z}
~
=~v
=F
| {z }
(2.186)
(2.187)
=0,~v k~
p
~ = ~r × F~
⇔M
(2.188)
39
2 Mechanik
2.6.4 Arbeit bei Drehbewegungen
Abbildung 2.23: Arbeit bei der Drehbewegung.
dW = F~ d~s
Z s1
F~ (s)d~s
⇒W =
s0
Z ϕ1
F~ (ϕ)(d~
ϕ × ~r)
⇔W =
ϕ0
Z ϕ1 ~r × F~ (ϕ) d~
ϕ
⇔W =
ϕ0
Z ϕ1
~ (ϕ)d~
M
ϕ
⇔W =
(2.189)
(2.190)
(2.191)
(2.192)
(2.193)
ϕ0
~ (~
~ unabhängig von ϕ
⇒W =M
ϕ1 − ϕ
~ 0 ), da M
(2.194)
2.6.5 Leistung bei Drehbewegungen
P =
dW
d ~
~ω
= M
ϕ
~=M
~
dt
dt
(2.195)
2.6.6 Energie bei Drehbewegungen
1
1
rot
Ekin
= mv 2 = mr2 ω 2
2
2
40
(2.196)
~
2.6 Drehimpuls L
Tabelle 2.1: Analogien zwischen Translation und Rotation.
Translation
Größe, Formelzeichen Einheit
Weg
m
~s, d~s
Geschwindigkeit
m/s
s
~v = d~
dt
Beschleunigung
m/s2
2
v
~a = d~
= ddt2~s
dt
Masse
kg
m
Kraft
kg m /s2 = N
p
F~ = m~a = d~
dt
Impuls
kg m/s = Ns
p~ = m~v
Arbeit
Nm = J = Ws
~
dW = F d~s
kinetische Energie
J
trans
Ekin
= 12 m~v 2
Leistung
W = J/s
dW
~
P = dt = F~v
Rotation
Größe, Formelzeichen
Winkel
ϕ
~ , d~
ϕ
Winkelgeschwindigkeit
ϕ
ω
~ = d~
dt
Winkelbeschleunigung
2
α
~ = dω
= ddtϕ2~
dt
Massenträgheitsmoment
P
J = i ∆mi ri2
~ = ~r × F~
Drehmoment M
~
~ = Jα
M
~ = ddtL
Drehimpuls
~ = J~ω
L
Arbeit
~ d~
dW = M
ϕ
kinetische Energie
rot
Ekin
= 12 J~ω 2
Leistung
~ω
P = dW
=M
~
dt
Einheit
rad=1
rad/s = 1/s
rad/s2 =1/s2
kg m2
Nm
kg m2 /s = Nms
Nm = J = Ws
J
W = J/s
41