Kapitel 3 Dynamik des Massenpunktes
Werbung

Kapitel 3
Dynamik des Massenpunktes
Wir haben in Kap. 2 gelernt, wie man bei vorgegebener Beschleunigung die
Bahn eines Teilchens, d.h. die Geschwindigkeit und den Ort des Teilchens als
Funktion der Zeit (mit Differentialrechnung oder mit numerischer Rechnung)
bestimmen können.
Bei der Kinematik wird nur gefragt, wie sich ein Teilchen bewegt.
Aber in vielen realistischen Fällen kennen wir die Beschleunigung des Teilchens
nicht.
Wir kennen die Kräfte, die auf das Teilchen wirken, oder die Energie des
Teilchens, und wir wollen diese Information benutzen, um die Bewegung
vorherzusagen. Wir wollen wissen, weshalb ein Teilchen sich bewegt. In diesem
Kapitel werden wir von Kräften sprechen.
Diese Methoden bilden das Gebiet der Dynamik. Eine zentrale Rolle in der
Dynamik spielt die Masse.
Wir werden dazu physikalische Grössen einführen, die für die gesamte Physik
von fundamentaler Bedeutung sind: der (lineare) Impuls (oder die Bewegungsgrösse) und die Kraft.
Auf den Begriffen Masse, Impuls und Kraft beruht die gesamte klassische Mechanik.
3.1
3.1.1
Die Masse
Die Definition der Masse
In unserer Alltagssprache benutzen wir austauschbar die Wörter Masse“ und
”
Gewicht“. Im Rahmen der Physik werden diese Wörter mit verschiedener
”
Bedeutung benutzt.
41
42
Physik I, Prof. W. Fetscher, HS 2007
a) Das Gewicht ist eine Kraft1 (und damit ein Vektor!), die ein Körper
z.B. auf den Boden ausübt. Das Gewicht ist eine Grösse, die mit einer
Waage gemessen wird.
b) Die Masse ist eine (skalare) Eigenschaft eines Körpers. Die Masse
ist ein Mass dafür, wieviel Stoff“ im Körper enthalten ist.
”
Das Gewicht eines Körpers kann in verschiedenen Situationen verschieden
sein. Das Gewicht eines Astronauts sei z.B. auf der Erdoberfläche 90 kg“.
”
Wenn er in seiner Umlaufbahn um die Erde ist, ist sein Gewicht gleich null.
Im Gegensatz dazu ist die Masse des Astronauts auf der Erde und in der
Umlaufbahn immer dieselbe. Der Astronaut ist nicht masselos geworden,
sondern nur gewichtslos.
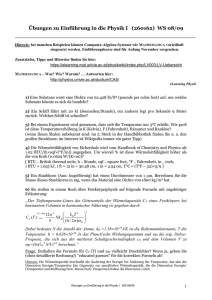
Rückstossversuch: Um die Masse genau zu definieren, werden wir einen
Rückstossversuch verwenden. Wir betrachten zwei Wagen, A und B, die sich
reibungsfrei über eine Luftkissenbahn bewegen können. Siehe Abb. 3.1.
Feder Faden
A
a)
B
reibungsfreie Luftkissenbahn
vB
b)
A
B
vA
reibungsfreie Luftkissenbahn
Abbildung 3.1: Ein Rückstossversuch: a) Anfangszustand b) Faden zerschnitten.
Am Anfang werden die beiden Wagen mit einem Faden zusammengebunden.
Zwischen den beiden Wagen ist eine Feder eingeklemmt.
Bei diesem Versuch wird der Faden zerschnitten, und die Geschwindigkeiten
der Wagen vA und vB werden gemessen.
1
Wir werden eine genaue Definition der Kraft in Kap. 3.5.1 einführen.
Physik I, Prof. W. Fetscher, HS 2007
43
Nachdem der Faden zerschnitten wurde, entfernen sich beide Wagen mit entgegengesetzen Geschwindigkeiten voneinander. Wir bemerken, dass die Geschwindigkeiten der Wagen nicht immer denselben Betrag besitzen.
Aus Experimenten mit verschiedenen Wagen schliessen wir, dass das Verhältnis
der Geschwindigkeiten der beiden Wagen gegeben ist durch
mA
vB
=
mB
vA
(3.1)
wobei mA und mB die Massen“ der Wagen sind.
”
Zwei wichtige Bemerkungen:
1. Das Rückstossexperiment hat nichts mit den Gewichten der Wagen zu
tun. Man könnte ebenso das Experiment im Weltraum (wo die Wagen
gewichtslos wären) durchführen. Das Ergebnis wäre dasselbe!
Auf der Erde haben wir eine Luftkissenbahn verwendet, so dass die Wagen
sich frei (z.B. mit vernachlässigbarer Reibung) bewegen. Die nach unten
gerichtete Erdbeschleunigung wird von der Luftkissenbahn kompensiert
(die Wagen fallen nicht nach unten). Obwohl die Wagen auf die Luftkissenbahn drücken, ist der Effekt dank der Luftströmung vernachlässigbar.
2. Das Ergebnis ist auch unabhängig von der Feder:
Wäre nämlich die Feder stärker, würden sich beide Wagen schneller
voneinander entfernen. Das Verhältnis der Geschwindigkeiten würde
sich aber nicht ändern. D.h., dass die Masse eines Wagens nur von den
Eigenschaften der Wagen abhängt.
Bis jetzt haben wir nur von einem Massenverhältnis gesprochen.
Wie sollen wir die Masse definieren?
Wir wählen eine der Massen, z.B. mB , so, dass sie eine genormte Masse besitzt.
Eine derartige genormte Masse wird zur Zeit noch als die Definition der Einheit
der Masse (das Kilogramm) verwendet:
[m] = 1 kg
(3.2)
Das Kilogramm ist die Masse eines Prototyps des Kilogramms. Es ist ein
Platin-Iridium-Zylinder, der im Bureau International des Poids et Mesures in
Sèvres bei Paris aufbewahrt wird.
44
Physik I, Prof. W. Fetscher, HS 2007
Masse
Masse
Masse
Masse
Masse
Masse
Masse
Masse
des Elektrons:
des Wasserstoffatoms:
eines Virus:
eines Liter Wassers:
der Erde:
der Sonne:
einer Galaxie:
des Universums:
9,1 · 10−31
1,7 · 10−27
10−18
1
24
6 · 10
2 · 1030
1041
≈ 1052
kg
kg
kg
kg
kg
kg
kg
kg
Tabelle 3.1: Massenskala
Dann werden alle Massen relativ zur gewählten Masse mB gemessen, als
mA =
vB
mB
vA
Alle anderen Massen werden dann durch einen Rückstossversuch als
v(BIPM − Prototyp)
mA = 1 kg ·
vA
(3.3)
(3.4)
definiert, wobei v(BIPM − Prototyp) die gemessene Geschwindigkeit des Prototyps ist.
Die Massenskala erstreckt sich über rund 80 Zehnerpotenzen (siehe Tabelle
3.1):
3.1.2
Träge und schwere Masse
Die vorher gegebene Definition der Masse entspricht einer genauen, aber komplizierten Art von Messung der Masse!
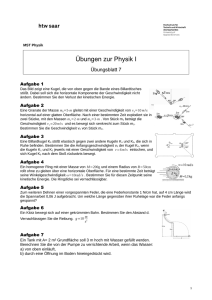
Eine Messung mit einer Waage ist eine einfachere Methode, um die Masse
zu messen. Siehe Abb. 3.2.
Die Waage vergleicht die Gewichte der Massen, d.h. die nach unten gerichteten
Gravitationskräfte, die die zwei Massen auf den Teller ausüben. Wenn die
Gravitationskräfte gleich gross sind, bleibt der Stab im Gleichgewicht.
Mit einer solchen Waage können wir die Gravitationskräfte von Massen
mit der Gravitationskraft, die die genormte Masse auf den Teller ausübt,
vergleichen.
Beim Vergleich der Messungen mit einer Waage mit denjenigen des Rückstossversuches bemerken wir, dass gleiche Massen die gleichen Gravitationskräfte ausüben.
Physik I, Prof. W. Fetscher, HS 2007
m
45
1
kg
Abbildung 3.2: Bestimmung der Masse m mit einer Waage durch Vergleich mit
einer genormten Masse. Bei gleich grossen Massen ist der Stab im Gleichgewicht.
Wir nehmen zwei Wagen, die sich mit derselben Geschwindigkeit im Rückstossversuch bewegen. Sie besitzen demnach dieselbe Masse. Wenn wir diese
Wagen auf den Teller der Waage stellen, wird der Stab im Gleichgewicht stehen.
Dieses experimentelle Ergebnis ist keineswegs offensichtlich!
Der Physiker Eötvös2 hat 1909 mit sehr genauen Versuchen bewiesen, dass
Körper mit gleicher Masse gleiche Gravitationskräfte ausüben.
Er hat dieses Ergebnis mit einer Genauigkeit von 1 Teil in 109 geprüft.
Wir sagen gewöhnlich:
a) Die träge Masse ist die Grösse, die wir mit einem Rückstossexperiment
messen, und
b) die schwere Masse ist die Grösse, die wir mit einer Waage messen.
Dank R.H. Dicke3 , der das Eötvössche Experiment noch verbessert hat, wissen
wir heutzutage, dass beide Definitionen mit einer Genauigkeit von 1 Teil in
1011 gleich sind.
Aufgrund dieser Äquivalenz von träger und schwerer Masse kann man nicht
feststellen, ob man sich in einem Gravitationsfeld oder in einem beschleunigten
Bezugssystem befindet!
Im Bereich der Mechanik wird nicht gesagt, warum diese zwei Massen gleich
sind. Nur in der Allgemeinen Relativitätstheorie von Einstein kann man mit
Hilfe des Äquivalenzprinzips verstehen, warum beide gleich sein müssen.
2
3
Loránd Eötvös (1848-1919)
Robert Henry Dicke (1916-1997)
46
3.2
Physik I, Prof. W. Fetscher, HS 2007
Der Impuls
Nun werden wir das Gesetz der Impulserhaltung einführen.
Ein Erhaltungs“-Gesetz im Gebiet der Physik drückt aus, dass eine Grösse
”
sich nicht ändert. Sie wird erhalten, d.h., sie wird vor und nach verschiedenen
Vorgängen dieselbe sein.
3.2.1
Die Definition des Impulses
Bei der Definition der Masse haben wir gesehen, dass in Rückstossversuchen
das Verhältnis der Geschwindigkeiten der Wagen eine konstante Zahl war, unabhängig von der Feder.
Jetzt wollen wir eine Grösse definieren, die sich nicht ändert, wenn der Faden
zwischen den Wagen zerschnitten wird.
Wir schreiben die Gleichung als
vB
mA
=
mB
vA
⇒
mA vA = mB vB
(3.5)
Wir bemerken, dass vA und vB die Beträge der Geschwindigkeitsvektoren der
Wagen sind. Da die Wagen sich in entgegengesetzen Richtungen voneinander
entfernen, gilt
mA v A = −mB v B
(3.6)
wobei wir die Geschwindigkeitsvektoren statt der Beträge der Geschwindigkeiten benutzt haben.
Diese Gleichung schreiben wir folgendermassen um:
mA v A + mB v B = 0 (nachdem der Faden zerschnitten ist)
(3.7)
Mit einem solchen Ausdruck haben wir die folgende Grösse den Wagen A und
B zugeordnet: mA v A ist nur eine Eigenschaft des Wagens A, und mB v B nur
eine Eigenschaft des Wagens B.
Eine neue Grösse wird deshalb definiert:
Der lineare Impuls eines Teilchens ist gleich dem Produkt aus seiner Masse
und seiner Geschwindigkeit:
p = mv
(3.8)
Der Impuls ist eine vektorielle Grösse, weil er das Produkt einer skalaren Grösse
(der Masse) und einer vektoriellen Grösse (der Geschwindigkeit) ist. Wir bemerken, dass gilt:
mA v A + mB v B = pA + pB = 0
(3.9)
Physik I, Prof. W. Fetscher, HS 2007
47
Die Gleichung drückt aus, dass die Summe der Impulse nach dem Rückstoss
gleich null ist.
Bevor der Faden zerschnitten wurde, waren beide Wagen in Ruhe. Vor dem
Rückstoss gilt daher
v ∗A = 0
v ∗B = 0 ,
(3.10)
wobei wir die Geschwindigkeiten vor dem Rückstoss mit einem ∗ gekennzeichnet
haben.
Die Summe der linearen Impulse, bevor der Faden zerschnitten wurde, ist dann
mA v ∗A + mB v ∗B = 0 (bevor der Faden zerschnitten ist)
(3.11)
Wir schliessen daraus, dass die Summe der linearen Impulse der Wagen
sich trotz des Rückstosses nicht geändert hat.
Die Summe der linearen Impulse der Wagen nennen wir den Gesamtimpuls
ptot = pA + pB
(3.12)
ptot (vorher) = ptot (nachher)
(3.13)
Die Gleichung
drückt die Erhaltung des Gesamtimpulses aus.
3.2.2
Extensive und intensive Grössen
Es gibt in der Physik extensive und intensive Grössen.
• Extensive Grössen sind Grössen, die von der Grösse des beobachteten
Systems abhängen, z.B. Masse, Stoffmenge, Ladung, Volumen.
• Intensive Grössen sind Grössen, die nicht von der Grösse des beobachteten Systems abhängen, z.B. Temperatur, Dichte, Druck.
Beispiel:
Zwei Autos fahren auf der Autobahn nebeneinander mit v = 100 km/h. Selbstverständlich ist die gemeinsame Geschwindigkeit der beiden Autos nicht etwa
v = 200 km/h, sondern wiederum v = 100 km/h. Offensichtlich ist die Geschwindigkeit eine intensive Grösse.
Die Massen der beiden Autos dürfen wir dagegen aufaddieren, sie sind skalare
extensive Grössen. Dementsprechend ist der Impuls eine vektorielle extensive Grösse.
48
Physik I, Prof. W. Fetscher, HS 2007
3.3
Die Impulserhaltung
3.3.1
Das allgemeine Gesetz
Auf den vorherigen Seiten haben wir einen Rückstossversuch betrachtet. Wir
haben gefunden, dass in einem solchen Versuch eine vektorielle Grösse — der
Gesamtimpuls — erhalten ist.
Bisher haben wir nur das Ergebnis des Rückstossversuches auf eine andere Art
neu dargelegt.
Das Gesetz der Impulserhaltung ist aber ganz allgemein gültig.
Es kann so formuliert werden:
Ein isoliertes“ System ist ein System, das keine Wechselwirkungen mit ande”
ren Körpern spürt. Das System kann sehr weit von anderen Körpern entfernt
sein, oder die Wechselwirkungen mit anderen Körpern kompensieren einander,
so dass der Effekt verschwindet.
In einem solchen isolierten System ist der Gesamtimpuls erhalten.
Das Gesetz der Erhaltung des Impulses ist eines der grundlegenden und
allgemein gültigen Gesetze der Physik. Wir kennen keine Ausnahmen von diesem Prinzip. Wir zeigen nun, dass die drei berühmten Newtonschen Gesetzen
aus dem Impulserhaltungsgesetz folgen.
Man beachte aber: Die Impulserhaltung ist ein Axiom und kann deshalb nicht
bewiesen werden! Der tiefere Grund für die Impulserhaltung liegt in der Invarianz von physikalische Vorgängen gegenüber einer räumlichen Translation,
das heisst, dass diese Vorgänge gleich ablaufen, auch wenn sie um eine Strecke
im Raum verschoben sind.
Die Impulserhaltung gilt für jede einzelne Komponente getrennt, es sind also
drei unabhängige Erhaltungssätze, eine für jede Dimension des Raums:
pges,x = cx
pges,y = cy
pges,z = cz
3.4
(3.14)
(3.15)
(3.16)
Das erste Newtonsche Gesetz: Trägheit
Eine erste Folgerung aus dem Impulserhaltungsgesetz ist das Trägheitsprinzip. Wir sehen, dass für ein isoliertes System gelten muss:
ptot = konst. ⇒
dptot
=0
dt
(3.17)
Physik I, Prof. W. Fetscher, HS 2007
49
Wenn ein System nur einen Körper enthält, ist der Gesamtimpuls gleich dem
Impuls des Körpers, und wir erhalten
dp
d(mv)
dv
=0=
=m
dt
dt
dt
(3.18)
wobei wir angenommen haben, dass sich die Masse des Körpers mit der Zeit
nicht ändert.
Daraus folgt:
dv
= 0 ⇒ v = konst. ⇒ a(t) = 0
dt
(3.19)
Es gilt das
Trägheitsprinzip: Ein Körper bleibt in Ruhe oder bewegt sich mit
konstanter Geschwindigkeit, wenn er isoliert (oder frei) ist.
Wir bezeichnen Koordinatensysteme, die mit einem ruhenden oder sich mit
konstanter Geschwindigkeit bewegenden Körper derart fest verbunden sind,
dass sich die Lage des Körpers darin nicht ändert, als Inertialsysteme (siehe
Abb. 3.3).
3.5
3.5.1
Das zweite Newtonsche Gesetz: Aktionsprinzip
Die Definition der Kraft
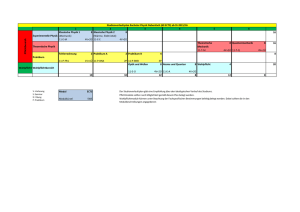
Wir betrachten einen Ball mit Masse m, der mithilfe eines Fadens eine
gleichförmige Kreisbewegung ausführt (siehe Abb. 3.4), die wir bereits in Kap.
2.5.3 studiert haben. Wir haben gesehen, dass
eine zum Zentrum des Kreises hin gerichtete Beschleunigung auf das Teilchen
wirken muss, damit das Teilchen sich auf einer Kreisbahn bewegt.
Wir können den Impuls des Balles berechnen. Es gilt:
r(t) = r cos ωt ex + r sin ωt ey
v(t) =
dr
= −rω sin ωt ex + rω cos ωt ey
dt
(3.20)
(3.21)
Damit ist der Impuls gleich:
p(t) = m v(t) = mrω (− sin ωt ex + cos ωt ey )
(3.22)
50
Physik I, Prof. W. Fetscher, HS 2007
K0
e z0
m
0
r
(t)
e y0
K
O0
r(
t)
ez
0
u t ex
ey
O
r 0 (t) = r(t) − u t
ex
Abbildung 3.3: Der Ort des Massenpunkts m werde in 2 Inertialsystemen beschrieben: Das System K0 bewege sich mit der konstanten Geschwindigkeit u
relativ zu K.
Der Impulsvektor zeigt in die Richtung des Geschwindigkeitsvektors und ist
deshalb tangential. Er ändert sich mit der Zeit, so dass sich der Ball auf dem
Kreis bewegt.
Wir können die zeitliche Ableitung des Impulses betrachten:
dp
= mrω (−ω cos ωt ex − ω sin ωt ey )
dt
= −mω 2 (r cos ωt ex + r sin ωt ey )
= −mω 2 r
(3.23)
Der resultierende Vektor zeigt zum Zentrum des Kreises hin. Dies ist die Richtung des Fadens.
Der Faden übt eine Kraft auf den Körper aus. Diese Kraft ist für die zeitliche
Änderung des Impulses verantwortlich.
Physik I, Prof. W. Fetscher, HS 2007
51
Zusammenfassend:
v
a
Faden
r
Abbildung 3.4: Die Beschleunigung des Balles ist zum Zentrum des Kreises hin
gerichtet.
Die resultierende Kraft, die auf einen Körper wirkt, wird als die zeitliche
Änderung des Impulses des Körpers definiert (siehe auch Abb. 3.5):
F ≡
dp
dt
(3.24)
Wir sagen: Wenn sich der Impuls eines Körper mit der Zeit ändert, wirkt auf
den Körper eine nicht verschwindende Kraft.
Weil der Impuls eine vektorielle Grösse ist, der eine Richtung und einen Betrag
besitzt, ist die Kraft ebenfalls ein Vektor, der durch eine Grösse F und eine
Richtung F̂ = F /F beschrieben wird. Zwei Kräfte, die am gleichen Punkt
angreifen4 , müssen wie Vektoren addiert werden (siehe Abb. 3.6):
F = F 1 +F 2
Die einzelnen Komponenten werden algebraisch addiert:
F1x + F2x
Fx
Fy =
F1y + F2y
Fz
F1z + F2z
4
Was wir tun müssen, wenn das nicht der Fall ist, werden wir später erklären.
(3.25)
(3.26)
52
Physik I, Prof. W. Fetscher, HS 2007
Abbildung 3.5: Isaac Newton
Im folgenden Abschnitt werden wir verschiedene Arten von Kräften definieren.
Wenn wir die Wirkung mehrerer Kräfte auf einen Körper betrachten, wird die
resultierende Kraft als die Vektorsumme der einzelnen Kräfte geschrieben:
X
F =
Fi
(3.27)
i
Es folgt daraus, dass sich der Impuls eines Körpers nur dann mit der Zeit
ändern wird, wenn sich die Wirkungen aller Kräfte nicht gegenseitig kompensieren.
F1
F
F2
Abbildung 3.6: Kräfteaddition.
3.5.2
Kraftstoss
Häufig ist es zweckmässig, den Impulssatz (für einen einzelnen Körper oder für
ein ganzes System) in der folgenden Form zu schreiben:
Physik I, Prof. W. Fetscher, HS 2007
53
F (t)
t
0
Abbildung 3.7: Kraftstoss: Die Flächen unter den beiden Kurven sind gleich
gross.
Z
Z
ṗ dt = pe − pa =
F ext dt
(3.28)
Falls wir den Impuls am Anfang (pa ) und am Ende (pe ) kennen, können wir
daraus zwar nichtR den zeitlichen Verlauf der Kraft F ext (t) berechnen, wohl
aber das Integral F ext (t)dt der Kraft (Kraftstoss). Im 1-dimensionalen Fall
entspricht der Wert dieses Integrals natürlich der Fläche unter der Kurve (Siehe
Abb. 3.7).
Beispiel 1:
Wir schiessen eine Kugel mit der Masse m und der Geschwindigkeit v a auf eine
Wand, so dass die Kugel darin stecken bleibt (v e = 0, siehe Abb. 3.8). Damit
wissen wir, dass die Wand einen Kraftstoss erfährt, welcher die folgende Grösse
hat:
Z
F dt = m v a
(3.29)
Falls die Kugel elastisch reflektiert wird, v e = −v a , so ist pe − pa = −2 m v a
und der Kraftstoss doppelt so gross. Mit dieser Überlegung werden wir später
den Druck eines Gases aus den Stössen der einzelnen Moleküle auf eine Wand
berechnen können.
Beispiel 2:
Ein Wasserstrahl wird senkrecht auf eine Wand gerichtet. Das Wasser soll nach
dem Aufprall senkrecht nach unten abfliessen (Siehe Abb. 3.9). Wir verspritzen
pro Zeit ein (konstantes) Volumen Wasser, z.B. dV /dt = V̇ = 10 L/s mit einer
54
Physik I, Prof. W. Fetscher, HS 2007
Anfangszustand
m
Endzustand
va
m
Abbildung 3.8: Schuss einer Kugel auf eine Wand.
Geschwindigkeit von v = 20 m/s. Damit gilt:
Z
Z
Z
dm
pe,x − pa,x = − dm · v = −
v dt = FH2 O · dt
dt
(3.30)
Die Kraft auf die Wand beträgt somit:
FW = −FH2 O =
3.5.3
dm
m3 3 kg
m
v = ṁ v = V̇ ρH2 O v = 10−2
10
20
= 200 N
dt
s
m3
s
(3.31)
Kräfte
Erstaunlicherweise gibt es in der Natur nur vier 5 voneinander verschiedene
elementare Kräfte oder Wechselwirkungen. Ihre wichtigsten Eigenschaften sind
in Tabelle 3.2 zusammengefasst.
Wir können vorläufig nur ganz kurz andeuten, was die Zahlen in dieser Tabelle
bedeuten:
• Relative Stärke: Vergleichen Sie die Grössen der Gravitationskraft und
der Coulombkraft zwischen zwei Protonen, die sich in einem beliebigen
Abstand voneinander aufhalten.
5
Vor einigen Jahren wurde viel über eine sogenannte Fünfte Wechselwirkung spekuliert,
da einige Experimente Hinweise auf die Existenz einer solchen Kraft gaben. Diese Gerüchte
sind aber, dank präzisen Untersuchungen, wieder weitgehend verstummt.
Physik I, Prof. W. Fetscher, HS 2007
55
Spritze
Abbildung 3.9: Wasserstrahl trifft auf eine Wand.
Kraft
Gravitation
Elektromagnetisch
Schwach
Stark
Relative Stärke
Reichweite
Austauschteilchen
10−40
∞
Graviton
1
137
−12
∞
Photon
10−18 m
W ±, Z 0
10−15 m
Gluonen
10
1
Tabelle 3.2: Elementare Kräfte
• Reichweite: Die beiden erstgenannten Kräfte wirken über beliebige Distanzen. Die beiden andern sind nur im subatomaren Bereich von Bedeutung (und wurden deshalb auch erst im 20. Jahrhundert entdeckt).
• Austauschteilchen: Weshalb ziehen sich z.B. Sonne und Erde gegenseitig
an ?
Weil zwischen diesen Himmelskörpern ständig eine riesige Anzahl von
masselosen Teilchen (die Gravitonen) hin- und herfliegen, die einen Impuls übertragen und dann beim Aufprall auf die Himmelskörper einen
Kraftstoss ergeben.
Alle anderen Kräfte, die zwischen makroskopischen Körpern wirken (Druckkräfte, Federkräfte, Reibungskräfte, usf.) lassen sich auf diese elementaren
Wechselwirkungen zurückführen, wobei der Zusammenhang manchmal einfach
abzuleiten, aber noch öfters erst aus sehr komplizierten (quantenmechanischen)
Abschätzungen ersichtlich ist.
56
Physik I, Prof. W. Fetscher, HS 2007
3.5.4
Beziehung zwischen Kraft und Beschleunigung
Welche Rolle spielt dann die Masse?
Wir können die Definition des Impulses als Funktion der Masse und der Geschwindigkeit des Körpers verwenden, um eine Beziehung zwischen der resultierenden Kraft und der Beschleunigung herzuleiten, die nur gilt, wenn die Masse
des Körpers konstant ist:
F ≡
dp
d
dv(t)
=
{m v(t)} = m
= m a(t)
dt
dt
dt
(3.32)
Es folgt damit
Aktionsprinzip: Die Beschleunigung eines Körpers, dessen Masse sich mit
der Zeit nicht ändert, ist umgekehrt proportional zu seiner Masse und direkt
proportional zur auf ihn wirkenden resultierenden Kraft:
a(t) =
1
F (t)
m
(3.33)
Weil die Masse eine skalare Grösse ist, zeigen die Beschleunigung und die resultierende Kraft immer in dieselbe Richtung6 .
SI-Einheit: Die Einheit der Kraft ist 1 Newton (N) und entspricht jener Kraft,
die benötigt wird, um einen Körper der Masse 1 kg mit 1 m/s2 zu beschleunigen:
[F ] = 1 N = 1 kg m/s2
3.6
(3.34)
Das dritte Newtonsche Gesetz: Aktion =
Reaktion
Wir betrachten die Wechselwirkung zwischen zwei Körpern. Jeder Körper übt
eine Kraft auf den anderen aus.
Jede Einzelkraft ist nur ein Aspekt einer gegenseitigen Wechselwirkung zwischen den zwei Körpern.
Übt ein Körper auf einen zweiten eine Kraft aus, so wirkt dieser auch auf den
ersten mit einer Kraft. Es gibt keine einzelne isolierte Kraft.
Wenn die erste Kraft als Aktionskraft bezeichnet wird, wird die zweite Reaktionskraft genannt (jede der beiden Kräfte kann natürlich als Aktion betrachtet werden, dann ist die andere die Reaktion).
6
Dies gilt nicht mehr in der speziellen Relativitätstheorie!
Physik I, Prof. W. Fetscher, HS 2007
57
Newton hat in seinem dritten Gesetz die Situation zusammengefasst und hat
die Richtungen und die Beträge der Kräfte postuliert:
Aktions-Reaktions-Prinzip: Zu jeder Aktion gehört eine gleich grosse Reaktion, die denselben Betrag besitzt, aber in die entgegengesetzte Richtung
zeigt.
Auch dieses Gesetz ist eine direkte Folgerung der Impulserhaltung. Wir betrachten ein isoliertes System mit zwei Körpern A und B. Bei einem isolierten
System bleibt der gesamte Impuls erhalten:
ptot = pA + pB = konst.
(3.35)
Wir berechnen die zeitliche Ableitung des gesamten Impulses:
dpA dpB
dptot
=
+
=0
dt
dt
dt
(3.36)
Aus der Definition der Kraft folgt:
FA + FB = 0,
(3.37)
wobei F A die Kraft ist, die auf den Körper A wirkt, und F B die Kraft, die
auf den Körper B wirkt. Weil das System isoliert ist, ist F A die Kraft, die der
Körper B auf A ausübt und F B die Kraft, die der Körper A auf B ausübt.
Damit:
F A = −F B :
3.6.1
Aktion = Reaktion
(3.38)
Kugel auf Tisch
Eine Kugel (1) drückt im Auflagepunkt mit der Kraft F 21 auf einen Tisch (2)
(siehe Abb. 3.10). Also wirkt der Tisch mit der Gegenkraft F 12 = −F 21 auf
die Kugel. Wäre diese Gegenkraft nicht vorhanden, dann würde die Kugel nach
dem 2. Newtonschen Axiom nach unten beschleunigt fallen!
3.6.2
Kugel in Wasser
Eine Kugel (1) befindet sich in einem wassergefüllten Gefäss (siehe Abb. 3.11).
Das Wasser (2) übt auf die Kugel einen Auftrieb F 12 aus; also drückt“ die
”
Kugel mit der Kraft F 21 auf das Wasser (Demonstration). Daneben gibt es in
diesem Beispiel eine Reihe von weiteren Kräften, z.B. wirkt auf die Kugel die
Erdanziehung F 13 (das Gewicht der Kugel); also wird die Erde von der Kugel
mit der Kraft F 31 = −F 13 angezogen, usf.
58
Physik I, Prof. W. Fetscher, HS 2007
1
F 12
2
F 21
Abbildung 3.10: Actio = reactio: Kugel drückt auf Tisch. Die Summe von Kraft
und Gegenkraft ist gleich null.
F 12
2
1
F 21
3
Abbildung 3.11: Actio = reactio: Kugel im wassergefüllten Gefäss. Die Summe
der Kraft und der Gegenkraft ist gleich null.
Physik I, Prof. W. Fetscher, HS 2007
59
vorher
m1
p1
nachher
p2
p01
m2
m1
m2
p02
Abbildung 3.12: Zentraler elastischer Stoss.
3.7
3.7.1
Anwendungen: Impuls und Impulserhaltung
Ein freier Körper im Weltraum
Was ist ein freier Körper? Das ist sicher eine Idealisierung!
Wir können trotzdem annehmen, dass für einen Körper im Weltraum, der sehr
weit entfernt von anderen Sternen und Planeten ist, die Wechselwirkung mit
dem Rest des Universums als vernachlässigbar betrachtet werden kann und der
Körper deshalb frei“ ist.
”
Ein Körper ist auch frei, wenn sich die Wechselwirkungen mit anderen Körpern
gegenseitig kompensieren, was zu einer verschwindenden Gesamtwechselwirkung führt.
In diesem Fall ist der Impuls des Körpers erhalten:
p = m v = konst.
(3.39)
Der Körper bewegt sich geradlinig mit konstanter Geschwindigkeit.
3.7.2
Zentraler elastischer Stoss zweier Kugeln
Abb. 3.12 zeigt den zentralen elastischen Stoss zweier Kugeln. Elastisch bedeutet, dass sich innere Grössen der Kugel, wie die Masse, beim Stoss nicht
ändern.
Impulserhaltung: pges = p0ges
p01
(3.40)
p02
⇒ p1 + p2 = +
⇔ (p01 − p1 ) = − (p02 − p2 )
| {z }
| {z }
:=∆p1
⇒
(3.41)
(3.42)
:=∆p2
⇔ ∆p1 = −∆p2
∆p1 + ∆p2 = 0
(3.43)
(3.44)
60
Physik I, Prof. W. Fetscher, HS 2007
3.7.3
Raketenantrieb
Der Raketenantrieb folgt aus der Impulserhaltung.
Eine Rakete erzeugt ihren Schub (= Kraft), indem Treibstoff verbrannt und
das dadurch erzeugte Gas nach hinten ausgestossen wird. Die Rakete wird
durch den Rückstoss nach vorne getrieben (Siehe Abb. 3.13).
Ausgestossenes
Gas
Treibstoff + Rakete
Abbildung 3.13: Prinzip des Raketenantriebs.
Wenn man Raketen in den Weltraum schiesst, drückt die Rakete gegen das
Gas, das von ihr ausgestossen wird. Das Medium (d.h. Luft in der Nähe der
Erdoberfläche) hat in diesem Fall nichts mit dem Antrieb zu tun!
Nun berechnen wir die sogenannte Raketengleichung. Wir brauchen nur das
Impulserhaltungsgesetz.
Wir definieren die folgenden Grössen:
1. v = Geschwindigkeit der Rakete,
2. u = Ausstossgeschwindigkeit des Gases relativ zur Rakete, und
3. M (t) = Masse der Rakete zur Zeit t.
Wir berechnen die Impulsänderung des gesamten Systems während eines Zeitintervalls ∆t. Wegen der Impulserhaltung muss die Impulsänderung gleich null
sein (Wir nehmen an, dass keine äussere Kraft auf die Rakete wirkt).
Zur Zeit t bewege sich die Rakete mit der Anfangsgeschwindigkeit v.
Der Impuls der Rakete ist gleich
p(t) = M (t) · v(t)
(3.45)
Nach der Zeit dt hat die Rakete eine Masse M –dm (wobei dm positiv ist
und der Masse des ausgestossenen Gases entspricht) und bewegt sich mit einer
Geschwindigkeit v + dv.
Physik I, Prof. W. Fetscher, HS 2007
61
Wenn das Gas mit einer Geschwindigkeit u relativ zur Rakete ausgestossen
wird, bewegt es sich mit der Geschwindigkeit v–u.
Der Gesamtimpuls ist deshalb gleich
p(t + dt) = (M − dm)(v + dv) + dm(v − u)
⇒ p(t + dt) = M v + M dv − v dm − dm dv + v dm − u dm
≈ M v + M dv − u dm ,
(3.46)
(3.47)
(3.48)
wobei wir den Term dm dv weggelassen haben, weil er ein Produkt aus zwei
sehr kleinen Grössen ist und daher im Vergleich zu den anderen Grössen vernachlässigbar ist.
Die Impulsänderung während des Zeitintervalls dt ist
p(t + dt) − p(t) ≈ {M v + M dv − u dm} − M v
≈ M dv − u dm
≡ 0,
(3.49)
wobei wir die Impulserhaltung verwendet haben. Es gilt daher
M dv = u dm
⇒
M
dm
dv
=u
dt
dt
(3.50)
Aus M (dv/dt) = F folgt, dass auf die Rakete eine Schubkraft F wirkt, mit
dem Betrag
dm
(3.51)
F =u
dt
und dass daher die Rakete beschleunigt wird.
Wir integrieren nun die Raketengleichung und erhalten
M
dv
dm
=u
dt
dt
⇒
dv
u dm
=
dt
M dt
(3.52)
oder (mit dm = – dM )
Zt
dv 0
dt =
dt0
t0
Zt
t0
u dm 0
dt = −u
M (t0 ) dt0
Zt
1 dM 0
dt
M (t0 ) dt0
(3.53)
t0
wobei wir angenommen haben, dass die Ausstossgeschwindigkeit des Gases
relativ zur Rakete konstant ist, und dass die Masse des Gases aus der Abnahme der Masse der Rakete kommt. Damit gilt:
M
Z (t)
v(t) − v0 = −u
M0
dM 0
= −u {ln (M0 − m) − ln M0 }
M 0 (t)
(3.54)
62
Physik I, Prof. W. Fetscher, HS 2007
wobei M0 die Anfangsmasse der Rakete zur Zeit t = t0 und m die Gesamtmasse
des ausgestossenen Gases ist.
Für den Fall M0 /(M0 − m) > e gilt
M0
M
> e ⇒ ln
>1
M0 − m
M0 − m
⇒v>u
(3.55)
Dann bewegt sich für einen Beobachter das ausgestossene Gas in der gleichen
Richtung wie die Rakete.
3.8
3.8.1
Anwendungen der Newtonschen Gesetze
Allgemeiner Ansatz zur Lösung kinematischer
Aufgaben
Die Gesetze von Newton erlauben es,
• Bewegungsabläufe unter gegebenen Kräften
• sowie Kräfte bei gegebenen Bewegungsabläufen
zu berechnen.
Für die Lösung von kinematischen Aufgaben hat sich das folgende Rezept“
”
bewährt:
1. Körper auswählen, dessen Bewegung untersucht werden soll.
2. Alle Kräfte F i aufschreiben, die auf diesen Körper in allgemeiner Lage
einwirken.
3. Wahl eines geeigneten Koordinatensystems:
• Inertialsystem7
• Achsen so orientieren, dass die Bewegung möglichst einfach wird.
4. Newtonsche Gesetze für alle Komponenten aufschreiben8 :
P
mr̈ = F =
i Fi
P
mẍ = Fx =
usf.
i Fix
7
(3.56)
Wir werden erst später, im Kapitel Scheinkräfte“ besprechen, wie die Newtonschen
”
Gesetze modifiziert werden müssen, wenn wir in einem beschleunigt bewegten Koordinatensystem arbeiten.
8
Falls der Körper eine konstante Masse hat. Sonst müssen wir berücksichtigen, dass
d
(mv)
= ṁv + mv̇ ist.
dt
Physik I, Prof. W. Fetscher, HS 2007
63
ez
R
ey
m
h
G
ex
O
Abbildung 3.14: Freier Fall mit Reibung.
5. Differentialgleichungen lösen. Damit erhalten wir die sog.
allgemeine Lösung des Problems. Diese enthält noch einige freie
Integrationskonstanten (c1 , c2 , ...).
6. Bestimmen der Integrationskonstanten aus den bekannten Anfangsbedingungen.
(Meist ist das Ort r 0 und Geschwindigkeit v 0 des Körpers zur Zeit t0 ).
Damit erhalten wir die spezielle (d.h. auf die spezielle Problemstellung
angepasste) Lösung des Problems und damit u.a.
v(t), r(t),
für alle t, t ≥ t0 oder t ≤ t0
(3.57)
Falls die Differentialgleichungen (3.56) analytisch nicht (oder nur mit Schwierigkeiten) gelöst werden können, empfiehlt es sich, die Differentialgleichungen
numerisch zu lösen, wobei die Anfangsbedingungen als Startwerte dienen.
3.8.2
Freier Fall im Schwerefeld
1. Wir untersuchen im Folgenden den freien Fall eines Körpers im Schwerefeld der Erde.
2. Auf diesen Körper wirken die folgenden Kräfte:
(a) das Gewicht G = mg, senkrecht nach unten. Falls die Fallhöhe h
klein gegenüber dem Erdradius ist, dürfen wir annehmen, dass g ≈
10 m s−2 konstant ist.
(b) eine Reibungskraft, die seine Bewegung zu hemmen versucht, also
in die umgekehrte Richtung zeigt, wie seine Geschwindigkeit:
R = −κ v̂
(3.58)
64
Physik I, Prof. W. Fetscher, HS 2007
Wir werden später sehen, dass ganz verschiedene Reibungskräfte
auftreten können:
α) trockene Reibung
κ ≤ κ0 = konstant
β) in zähen Flüssigkeiten
κ = κ1 v, κ1 konstant, v klein
γ) in Flüssigkeiten und Gasen κ = κ2 v 2 , κ2 konstant, v gross .
3. Als Koordinatensystem wählen wir vorläufig ein System, das starr mit
der Erde verbunden ist und nehmen an, dass dies ein Inertialsystem sei
(vgl. auch Kap. 3.10). Die Achsen wählen wir aus Symmetriegründen so,
dass der Fall längs der z-Achse erfolgt (siehe Abb. 3.14).
4. Die Newtonschen Gesetze lauten dann9
mr̈ = G + R
ẍ
0
0
m ÿ =
z̈
−mg + R
(3.59)
5. Wir behandeln zunächst nur den Fall, in dem wir die Reibung völlig
vernachlässigen können10 : Dann können wir die allgemeine Lösung der
Differentialgleichungen sofort erraten:
ẋ(t) = C1
; x(t) = C1 t + C2
ẏ(t) = C3
; y(t) = C3 t + C4
ż(t) = −gt + C5 ; z(t) = − 21 gt2 + C5 t + C6
(3.60)
6. Wir verlangen, dass der Körper zur Zeit t = 0 am Ort r = (0,0,h) ist.
Damit erhalten wir 3 Gleichungen für die unbekannten Integrationskonstanten:
x(0) = C2 = 0
y(0) = C4 = 0
(3.61)
z(0) = C6 = h
Die Tatsache, dass der Körper zur Zeit t = 0 keine Anfangsgeschwindigkeit haben soll, v 0 = {0,0,0}, ergibt uns alle restlichen Unbekannten:
ẋ(0) = C1 = 0
ẏ(0) = C3 = 0
ż(0) = C5 = 0
(3.62)
Die spezielle Lösung unseres Problems lautet somit:
x(t) = 0,
ẋ(t) = 0
Was zu
y(t) = 0,
ẏ(t) = 0
erwarten war !
z(t) = h − 12 gt2 , ż(t) = v(t) = − gt
9
10
In unserem Koordinatensystem hat der Vektor g die Komponenten {0, 0, −g}.
Wann ist dies in der Praxis auch tatsächlich der Fall ?
(3.63)
Physik I, Prof. W. Fetscher, HS 2007
65
Block A
Block B
Abbildung 3.15: Aufeinander befindliche Körper.
Auch dieses Resultat ist nicht sehr originell; wir haben damit nur auf eine
äusserst komplizierte Weise ein altbekanntes Resultat abgeleitet. Der Witz“
”
dieses Verfahrens ist aber, dass wir damit auch viel kompliziertere Probleme
lösen können11 .
3.9
Anwendungen: Kontaktkräfte
In der Natur beobachten wir verschiedene Arten von Kräften. Wir werden uns
nun mit den Kräften, die auf makroskopische Gegenstände wirken, beschäftigen.
Diese Kräfte, sogenannte Kontaktkräfte, werden z.B. von Federn, Fäden oder
Oberflächen ausgeübt, wenn diese in direktem Kontakt mit den Gegenständen
sind.
Das Konzept der Kraft und die Newtonschen Gesetze spielen ihre wichtigste
Rolle in Anwendungen. Wenn wir sie nicht anzuwenden wissen, dann sind sie
nicht nützlich.
Wir diskutieren im Folgenden einige Anordnungen.
3.9.1
Körper, die sich aufeinander befinden
Wir betrachten ein System mit zwei Blöcken: der erste Block sitzt auf dem
zweiten, der sich auf dem Boden befindet (siehe Abb. 3.15).
Im allgemeinen können wir einige Regeln“ formulieren, um die Anwendung
”
von Kräften zu vereinfachen:
1. Man muss komplizierte Systeme in kleine Teile unterteilen, so dass jeder
Teil als ein Massenpunkt (Siehe Kap. 2.2) betrachtet werden kann.
11
Was mit der Mittelschulphysik in der Regel nicht der Fall ist. Dort ist zur Lösung jedes
neuen Problems scheinbar ein neuer, mysteriöser Trick nötig.
66
Physik I, Prof. W. Fetscher, HS 2007
F A = MA g
MA
NA
FA
NB
F B = MB g
MB
F AB F B
Abbildung 3.16: Aufeinander befindliche Körper mit markierten Schwerpunkten und Kräftediagramm.
2. Jeder Körper wird durch einen Punkt dargestellt.
3. Man zeichnet die Kräfte für jeden Massenpunkt. Nur die Kräfte, die auf
den Massenpunkt wirken, werden dargestellt.
4. Jede Kraft muss eine Richtung und einen Betrag besitzen.
Verschiedene Körper können z.B. durch Feder- oder Fadensysteme miteinander
verbunden werden oder können aneinander stossen oder ziehen.
Alle Wechselwirkungen zwischen Körpern werden durch Kräfte dargestellt.
In unserem Beispiel sind wir an den zwei Blöcken A und B interessiert. Die
Massen werden als MA und MB bezeichnet. Der Boden wird nicht betrachtet,
und deshalb werden wir die Kräfte, die auf den Boden wirken, nicht eintragen.
Das entsprechende Kräftediagramm ist in Abb. 3.16 wiedergegeben.
Wir finden 5 Kräfte:
1. Block A:
(a) F A ist die Gravitationskraft (d.h. das Gewicht) des Blocks A der
Masse MA . Diese Kraft beschreibt die Wechselwirkung zwischen der
Erde und dem Block A.
(b) N A ist die Normalkraft, die der Block B auf den Block A ausübt.
2. Block B:
(a) F B ist die Gravitationskraft (d.h. das Gewicht) des Blocks B der
Masse MB . Diese Kraft beschreibt die Wechselwirkung zwischen der
Erde und dem Block B.
(b) N B ist die Normalkraft, die der Boden auf den Block B ausübt.
Physik I, Prof. W. Fetscher, HS 2007
67
(c) F AB ist die Kraft, die der Block A auf den Block B ausübt.
Diese Kräfte sind vektorielle Grössen, die eine Richtung und einen Betrag besitzen.
Wir diskutieren die Gleichgewichtssituation, d.h. wenn die Körper in Ruhe
bleiben. In diesem Fall müssen die wirkenden Kräfte einander kompensieren.
Wir finden eine Bedingung für jeden Körper:
Block A:
Block B:
F A + NA = 0
F B + N B + F AB = 0
(3.64)
(3.65)
oder
(
F A + NA
= MA g + N A = 0
F B + N B + F AB
= MB g + N B + F AB = 0
(3.66)
Wir verwenden nun das Aktions-Reaktions-Prinzip. Weil nun
1. F AB die Kraft ist, die der Block A auf den Block B ausübt, und weil
2. N A die Kraft ist, die der Block B auf den Block A ausübt,
müssen sie einander kompensieren. Die Kraft N A kann als die Reaktion der
Kraft F AB betrachtet werden oder umgekehrt. Die Kräfte entsprechen der gegenseitigen Wechselwirkung zwischen den zwei Blöcken. Damit ist:
F AB = −N A
(3.67)
und es folgt
(
NA
MB g + N B − N A
= −MA g
=0
(3.68)
Schliesslich ist:
⇒
MB g + N B + MA g = 0
(MA + MB ) g + N B = 0
⇒ N B = − (MA + MB ) g
(3.69)
(3.70)
(3.71)
Wie erwartet, sagt diese Gleichung voraus, dass die Kraft N B , die der Boden
auf den Block B ausübt, das gesamte Gewicht der Blöcke kompensieren muss.
In ähnlicher Weise muss die Kraft N A , die der Block B auf den Block A ausübt,
das Gewicht des Blocks A kompensieren:
N A = −MA g
(3.72)
68
Physik I, Prof. W. Fetscher, HS 2007
Decke
30◦
FB
45◦
FA
y
30◦
Knoten
45◦
FC
M
x
Abbildung 3.17: Hängendes Gewicht und dazugehörige Kräfte.
3.9.2
Ein hängendes Gewicht
Ein Gewicht hängt an drei Fäden von einer Zimmerdecke, wie in der Abb. 3.17
gezeigt ist:
Es wird beobachtet, dass das Gewicht der Masse M in Ruhe bleibt. Was sind
die Beträge der Kräfte in den Fäden?
Der Knoten verbindet die drei Fäden: Er wird als Körper“ betrachtet. Gemäss
”
Abb. 3.17 wirken die drei Kräfte F A , F B und F C auf ihn.
Wenn das Gewicht in Ruhe bleibt, so gilt
FA + FB + FC = FA + FB − M g = 0
(3.73)
Wir wählen das Koordinatensystem, wie gezeigt, und erhalten zwei Gleichungen:
(
FA,x + FB,x
=0
(3.74)
FA,y + FB,y − M g = 0
Mit Hilfe der Winkel
(
−FA cos 30◦ + FB cos 45◦
FA sin 30◦ + FB sin 45◦ − M g
oder
√
√
3
2
−
FA +
FB
2 √ 2
1 FA + 2 FB − M g
2
2
=0
=0
(3.75)
=0
(3.76)
=0
Damit gilt
r
2M g
3
√
FA =
und FB =
FA
(3.77)
2
1+ 3
Wie erwartet, ist die Kraft FB wegen des grösseren Winkels grösser als FA .
Physik I, Prof. W. Fetscher, HS 2007
m
69
FR
x = x+ > x0 ⇒ FR < 0
x = x0 ⇒ FR = 0
m
FR
m
x−
x0
x = x− < x0 ⇒ FR > 0
x+
x
Abbildung 3.18: Federkraft-Diagramm. Weil die Federkraft versucht, die Feder
in ihren ursprünglichen Zustand zurückzuführen, spricht man von Rückstellkraft FR .
3.9.3
Federkraft (Hookesches Gesetz)
Hookesches Gesetz:
Die Kraft, die wir zum Dehnen einer Feder aufwenden müssen, beträgt (näherungsweise, innerhalb der Elastizitätsgrenze), siehe Abb. 3.18:
F = k (x − x0 ) ,
(3.78)
wobei k die Federkonstante und (x − x0 ) die Auslenkung aus der Ruhelage ist
(wo wir den Nullpunkt P0 annehmen). Die rücktreibende Kraft FR der Feder
ist nach Newtons 3. Axiom entgegengesetzt gleich gross (FR = −F ) (siehe
Abb. 3.18), so dass wir erhalten:
mẍ = −k (x − x0 )
(3.79)
Diese Kraft ist nicht elementar, sondern auf elektromagnetische Kräfte zwischen den Atomen und Molekülen zurückzuführen.
Wir wählen die neue Variable ξ = (x − x0 ), für die gilt:
d ξ = d x.
(3.80)
Damit lautet die homogene Differentialgleichung 2. Ordnung
k
ξ¨ = − ξ
m
(3.81)
Die Lösung kann man durch Erraten erhalten. Es wird eine Funktion gesucht,
die bis auf eine Konstante gleich ihrer 2. Ableitung ist. Da sowohl sin ωt als
auch cos ωt dieser Bedingung genügen, ist der allgemeinste Ansatz
ξ(t) = A · sin ωt + B · cos ωt
(3.82)
70
Physik I, Prof. W. Fetscher, HS 2007
Einsetzen des Ansatzes in Gl. (3.81) ergibt
ξ¨ = −ω 2 ξ
(3.83)
mit
k
(3.84)
m
Die Koeffizienten A und B ergeben sich aus den jeweiligen Anfangsbedingungen. Als Beispiel wählen wir eine Auslenkung um x = x1 . Zur Zeit t = 0 werde
der Massenpunkt losgelassen. Wir ersetzen zunächst in unsererer Lösungsgleichung (3.82) ξ wieder durch x − x0 und erhalten
ω2 =
x − x0 = A · sin ωt + B · cos ωt
bzw.
x = x0 + A · sin ωt + B · cos ωt
(3.85)
Wir setzen nun die Bedingung x(t = 0) = x1 ein:
⇒
x1 − x0 = B
(3.86)
Damit ist die Konstante B bestimmt. Die Konstante A können wir aus der 2.
Bedingung ẋ = ξ˙ = 0 für t = 0 bestimmen. Dazu leiten wir zunächst Gl. (3.85)
nach der Zeit ab:
⇒
⇒
ẋ = A ω · cos ωt − Bω · sin ωt
0 = Aω
A=0
(3.87)
(3.88)
Die gesuchte spezielle Lösung ist
x = x0 + (x1 − x0 ) · cos ωt
3.9.4
(3.89)
Reibungskraft (Festkörperreibung)
Auch die Reibungskräfte sind keine elementare Kräfte. Sie sind vielmehr
auf die elektrische Wechselwirkung zwischen den Oberflächenatomen der sich
berührenden Körper zurückzuführen und verlaufen parallel zur Berührungsfläche (siehe Abb. 3.19).
3.9.4.1
Haftreibung
FR ≤ µ0 FN
(3.90)
Physik I, Prof. W. Fetscher, HS 2007
71
FG
F
m
FR
FN
Abbildung 3.19: Festkörperreibung
mit
F R := Reibungskraft
F N := Normalkraft
µ0
(3.91)
:= Haftreibungskoeffizient
Der Haftreibungskoeffizient ist in 1. Näherung unabhängig von der Grösse der
Auflagefläche12 , er ist aber abhängig von der Art der sich berührenden Materialien und ihrer Oberflächenbeschaffenheit.
Gleichgewichtsbedingungen (siehe Abb. 3.20):
horizontal : FR cos ϕ − FN sin ϕ = 0
vertikal
: FR sin ϕ + FN cos ϕ = FG
(3.92)
FN
m
FR
FG
h
ϕ
`
Abbildung 3.20: Haftreibung auf schiefer Ebene.
12
Das gilt jedoch nicht für Pneus, da sich die Gummimischung eher wie eine hochviskose
Flüssigkeit verhält!
72
Physik I, Prof. W. Fetscher, HS 2007
Reibungskoeffizient
Oberfläche:
Haftreibung µ0
Gleitreibung µ
Rollreibung mR /mm
Stahl auf Stahl
glatt
Holz auf Holz
gefettet
0,15 . . .
0,15 . . .
0,42
glatt
0,10
0,01
0,4 . . .
0,2 . . .
0,9
0,6
0,4
Tabelle 3.3: Beispiele für Reibungskoeffizienten
⇒
FR
sin ϕ
=
= tan ϕ ≤ µ0
FN
cos ϕ
;
tan ϕ =
h
`
(3.93)
Der Körper haftet, solange diese Ungleichung erfüllt ist, nachher beginnt er zu
gleiten. Das Resultat ist unabhängig von FG .
3.9.4.2
Gleitreibung
FR = µ FN
(3.94)
µ ist der Gleitreibungskoeffizient, der in 1. Näherung unabhängig von der Auflagefläche oder der Geschwindigkeit ist. Meist gilt:
µ0 > µ
(3.95)
Im einzelnen zeigen sich aber häufig recht grosse Abweichungen. Abb. 3.21 gibt
den Verlauf der Reibungskraft in Funktion der angewendeten Kraft F wieder.
FR
µ0 FN
F
Haftreibung
Gleitreibung
Abbildung 3.21: Reibungskraft in Funktion einer angewandten Kraft F :
Physik I, Prof. W. Fetscher, HS 2007
73
ω
r
F
FG
v
FN
FR
mR
Abbildung 3.22: Rollreibung.
3.9.4.3
Rollreibung
Wir betrachten ein Rad, welches sich mit konstanter Geschwindigkeit v bewegt
(siehe Abb. 3.22). Im Gleichgewichtszustand wirken die folgenden Kräfte:
F = FR ≤ µ0 FN
FN = FG
(3.96)
(3.97)
Dabei ist F die Kraft, mit welcher das Fahrzeug das Rad vorwärts schiebt.
Von Bedeutung ist nun, dass die Normalkraft FN um die Strecke mR versetzt
gegenüber FG (dem Gewicht des Rades + Anteil Fahrzeuggewicht) angreift.
Damit bewirkt FN ein die Bewegung hemmendes Moment der Grösse:
M = FN mR − r FR
(3.98)
Bei einem nicht angetriebenen Rad und bei Vernachlässigung der Achsreibung
muss M = 0 sein. Daraus erhalten wir:
F = FR = FN
mit
µR =
mR
= µR FN
r
mR
r
(3.99)
(3.100)
Die Rollreibungskonstante µR hängt also vom Radius r des Rades ab; sie ist
im allgemeinen viel kleiner13 (µR ' 0,001. . . 0,01) als µ oder µ0 .
13
Deshalb haben auch die meisten Strassen- oder Schienenfahrzeuge Räder !
74
3.9.5
Physik I, Prof. W. Fetscher, HS 2007
Reibungskraft (Strömungswiderstand)
Die Reibungskraft in zähen (viskosen) Fluiden14 lässt sich nicht durch elementare Funktionen darstellen. Man kann sie jedoch in eine Potenzreihe nach der
Geschwindigkeit v entwickeln:
|F R | =
∞
X
ai v i
(3.101)
i=0
Der Term a0 ist offensichtlich gleich null, da bei ruhendem Körper die Reibung verschwindet. Im allgemeinen genügt es, nur die Terme a1 und a2 zu
berücksichtigen:
(
κ·v
für kleine Geschwindigkeiten
(3.102)
|F R | =
ρ 2
cW · A · · v für grosse Geschwindigkeiten
2
mit
cW = Widerstandsbeiwert
A = Querschnittsfläche des Körpers
ρ = Dichte des Gases
v = Geschwindigkeit relativ zum Medium
Für eine Kugel gilt das Stokessche Gesetz:
F R = −(6πηr) · v
(3.103)
mit
η = Viskosität
r = Kugelradius
3.9.6
Bremsweg auf nasser Strasse (feuchte Reibung)
Wir nehmen eine Bewegung auf einer geraden Strasse ohne Steigung an. Damit
könen wir die Bewegung ausschliesslich durch eine Koordinate x beschreiben.
Die Reibungskraft15 FR sei proportional und entgegengesetzt zur Geschwindigkeit:
FR = −κ ẋ
(3.104)
Nach dem 2. Newtonschen Axiom ist
mẍ = −κ ẋ
ẍ = −α ẋ
14
(3.105)
(3.106)
Fluide sind Flüssigkeiten oder Gase
Beachte: FR stellt in diesem Fall nicht den Betrag eines 3-dimensionalen Vektors dar,
sondern einen 1-dimensionalen Vektor und kann deshalb negative Werte annehmen!
15
Physik I, Prof. W. Fetscher, HS 2007
75
mit
κ
(3.107)
m
Da x selber in der Differentialgleichung nicht vorkommt, ergibt sich eine Vereinfachung mit der Geschwindigkeit u(t) als neuer Funktion u(t) = ẋ(t):
α=
u̇ + α u = 0
(3.108)
Es wird also eine Funktion gesucht, die proportional zu ihrer ersten Ableitung
ist. Wir könnten sie wieder erraten; dieses Mal wollen wir die Differentialgleichung aber durch Integration lösen. Wir schreiben zunächst die Ableitung u̇
als Quotient der Differentiale d u und d t und versuchen, auf der linken Seite
alle Terme mit u und auf der rechten Seite entsprechend alle Terme mit t zu
gruppieren, so dass wir anschliessend nur noch beide Seiten integrieren müssen:
du
= −α u
dt
(3.109)
du
= −α dt
u
Z
Z
du
= −α dt
u
ln u = −α t + c1
(3.110)
(3.111)
(3.112)
u = e−α t+c1
u = c2 e−α t
(3.113)
Bestimmung der Integrationskonstanten c2 : Die Anfangsgeschwindigkeit sei
u = u0 für t = 0. Dann ist
u0 = c2 · 1
Damit erhalten wir die Lösung
u = u0 e−α t
(3.114)
Den zurückgelegten Weg erhalten wir durch Integration der Geschwindigkeit
über die Zeit (siehe Abb. 3.23):
Zt
x(t) =u0
0
e−α t d t0
(3.115)
0
u0 h −α t0 it
=−
e
α
0
u0
x=
1 − e−α t
α
(3.116)
76
Physik I, Prof. W. Fetscher, HS 2007
f (αt)
1,0
u
u0
= e−αt
α
u0
· x = 1 − e−αt
0,5
0
αt
0
1
2
3
Abbildung 3.23: Geschwindigkeit u und Bremsweg x auf nasser Strasse. Die
Geschwindigkeit zur Zeit t = 0 ist gleich u = u0 , und α ist proportional zur
Reibungskonstante κ (siehe Gl. (3.107)).
3.10
Kraftfelder
3.10.1
Einleitung
Es ist oft sehr kompliziert, die Wechselwirkung zwischen mehreren Teilchen zu
berechnen, schon die Drei-Körper-Gravitationswechselwirkung lässt sich nicht
mehr analytisch lösen. In diesem Fall trifft man folgende Vereinfachung: Man
trennt die n Teilchen in n−1 plus 1 Teilchen auf. Die n−1 Teilchen verursachen
dann eine effektive Wechselwirkung auf das n. Teilchen. Da n im allgemeinen als
sehr viel grösser als 1 angenommen wird, kann man die auf die n − 1 Teilchen
rückwirkende Kraft vernachlässigen. So bewirkt die Erdanziehung auf einen
Menschen eine deutlich grössere Beschleunigung als die Menschanziehung auf
die Erde!
Man kann also im gesamten Raum in Abhängigkeit vom Ort und gegebenenfalls auch von der Zeit die Kraft auf ein Probeteilchen angeben. Wir bezeichnen
dies als ein Kraftfeld F (x, y, z, t) = F (r, t).
Ein Sonderfall eines Kraftfeldes ist das statische Feld:
F (r, t) = F (r)
∀t
(3.117)
In der Physik definiert man das Kraftfeld häufig wie folgt:
F (r, t) = γ · f (r, t)
(3.118)
Physik I, Prof. W. Fetscher, HS 2007
77
Dabei ist γ eine Grösse, die sich nur auf das einzelne (Probe-) Teilchen bezieht,
wie z.B. die Masse oder die Ladung des Teilchens, während f (r, t) nur die Wirkung der restlichen (n−1) Teilchen beschreibt, so dass man für unterschiedliche
Probeteilchen stets nur ein Feld benötigt!
Wir bezeichnen in dieser Vorlesung derartige Felder f (r, t) = F (r, t)/γ als
spezifische Felder.
3.10.2
Elektrische Kraft (Coulombkraft)
Die Coulombkraft zwischen zwei Ladungen Q und q ist
1 Q
1 qQ
r̂ = q ·
r̂
2
4πε0 r
4πε0 r2
| {z
}
F E (r) =
(3.119)
≡E
Dabei haben wir angenommen, dass Q q, so dass die von q auf Q ausgeübte Kraft vernachlässigt werden kann, und dass Q im Ursprung unseres
Koordinatensystems liegt. Das elektrische Feld E ist demnach eine auf die
Probeladung normierte Kraft:
E(r) =
F E (r)
q
(3.120)
Abb. 3.24 zeigt das elektrische Feld E einer positiven Ladung Q. Das Feld
lautet in diesem Fall:
E(r) =
1 Q
r̂
4πε0 r2
(3.121)
Da Kräfte als Vektoren zu einer resultierenden Kraft addiert werden können,
gilt dasselbe auch für die elektrische Feldstärke. Man nennt dies Superpositionsprinzip. Abb. 3.25 zeigt das elektrische Feld E eines elektrischen Dipols.
Dieser besteht aus zwei räumlich getrennten entgegengesetzten Ladungen.
Das Feld lautet in diesem Fall:
Q
E=
4πε0
r − r1
r − r2
3 −
|r − r 1 |
|r − r 2 |3
wobei r 1 und r 2 die Ortsvektoren der beiden Ladungen sind.
(3.122)
78
Physik I, Prof. W. Fetscher, HS 2007
Elektrisches Feld
Feldlinien
+
+
Abbildung 3.24: Elektrisches Feld und Feldlinien einer positiven Ladung. Die
Feldlinien folgen in jedem Punkt des Raumes der Richtung des Feldes. Die
Kreise sind Schnitte durch die Äquipotentialflächen.
+Q
+
E
−
−Q
Abbildung 3.25: Elektrisches Feld und Feldlinien eines Dipols. Die Feldlinien
folgen in jedem Punkt des Raumes der Richtung des Feldes.
Physik I, Prof. W. Fetscher, HS 2007
79
M
r
m
Abbildung 3.26: Kugelsymmetrisches Kraftfeld einer Kugel der Masse M . Die
Kreise sind Schnitte durch die Äquipotentialflächen, die durch den Mittelpunkt
der Kugel laufenden Linien die Feldlinien.
3.10.3
Gravitationskraft
3.10.3.1
Gravitation und Gewicht
Die von einer Masse M auf eine andere Masse m ausgeübte Kraft ist (siehe
Abb. 3.26):
mM
M
F m = −G 2 r̂ = m · −G 2 r̂
(3.123)
r
r
{z
}
|
≡g(r)
Diese Kraft wird auch als Gewichtskraft oder kurz Gewicht bezeichnet. Als
Kraft ist das Gewicht stets ein Vektor und damit nie mit einer Masse identisch,
80
Physik I, Prof. W. Fetscher, HS 2007
die ja ein Skalar ist. Nach dem 2. Newtonschen Axiom ist
mM
r̂
r2
M
am = −G 2 r̂
r
m am = −G
⇒
(3.124)
(3.125)
Entsprechend ist
aM = −G
⇒
m
r̂
r2
(3.126)
m
|aM |
=
1 für m M
|am |
M
(3.127)
Wir untersuchen als nächstes das Gravitationsfeld der Erde
g(r) = −G
M
r̂
R2
(3.128)
nahe der Erdoberfläche, wobei RE der Erdradius und M die Masse der Erde
sind. Direkt an der Oberfläche erhalten wir
g r̂ = −G
M
r̂
R2
(3.129)
g = 9,81 m/s2 ,
(3.130)
Die Erdbeschleunigung in der Höhe h über dem Erdboden beträgt dann
M
(R + h)2
1
M
= −G 2 ·
R } (1 + h/R)2
| {z
g(h) = −G
(3.131)
(3.132)
g(0)
h
≈ g(0) · 1 − 2
R
(3.133)
und nimmt damit linear mit der Höhe ab.
3.10.3.2
Scheinbare Gewichtskraft
Wir bemerken die Gewichtskraft nur, wenn sich eine Gegenkraft zu ihr ausbildet. So wehrt sich der Boden, auf dem wir stehen, gegen das Eindringen
unseres Körpers infolge der Gewichtskraft, indem er eine gleich grosse, aber
entgegengesetzt gerichtete Kraft auf uns ausübt. Diese Kraft spüren wir an
den Fusssohlen.
Physik I, Prof. W. Fetscher, HS 2007
81
K0
m
y0
0
r
(t)
O0
r(t
)
x0
R(t)
y
K
O
x
Abbildung 3.27: Aufzug als beschleunigtes Bezugssystem K0 .
Wenn wir uns in Ruhe befinden, ist nach Newton die Summe aller Kräfte gleich
null:
X
a=0 ⇒
Fi = FG + FN = 0
(3.134)
i
⇔ F N = −F G
(3.135)
|F N | = |F G |
(3.136)
sowie
Wenn aber zusätzliche Kräfte auftreten, dann ist unser scheinbares“ Gewicht
”
verschieden.
Beispiele:
1. Aufzug (siehe Abb. 3.27):
(a) Aufzug fährt nach oben mit der Beschleunigung aA los. Wir betrachten die y-Komponente:
−mg + FN = maA ,
⇒
aA > 0
FN = m (g + aA ) > mg
(3.137)
(3.138)
82
Physik I, Prof. W. Fetscher, HS 2007
(b) Aufzug fährt mit vA = konst.
⇒
⇒
aA = 0:
FN = mg
(3.139)
(c) Aufzug bremst, um anzuhalten, aA < 0:
⇒
FN = m (g + aA ) < mg
(3.140)
2. Astronaut im Raumschiff:
Ein Astronaut der Masse mA befinde sich in einem Raumschiff der Masse
mR in einer Umlaufbahn U:
⇒
mA aA = mA g U + F N
mR aR = mR g U − F N
(mA + mR ) g U = mA aA + mR aR
(3.141)
(3.142)
(3.143)
Falls sich der Astronaut relativ zum Raumschiff in Ruhe befindet, gilt:
aR = aA ≡ a
⇒ gU = a
⇒ mA a = mA g U = mA g U + F N
⇒ FN = 0
(3.144)
(3.145)
(3.146)
(3.147)
Demnach fallen sowohl der Astronaut als auch das Raumschiff mit derselben Beschleunigung zur Erde hin!
aR = aA =
v2
RU
(3.148)
Hier bedeuten v die Bahngeschwindigkeit und RU den Bahnradius.
Schwerelosigkeit bedeutet demnach, dass die gesamte Beschleunigung
von der Schwerkraft herrührt.
3. Erdrotation (siehe Abb. 3.28):
Wir untersuchen das auf den Massenpunkt m wirkende Kräftegleichgewicht am Breitengrad ϕ:
F G + F N = F ZP
(3.149)
Da sich die Erde um ihre Achse dreht, benötigt man eine Zentripetalkraft F ZP = m aZP , um die Masse m auf einer Kreisbahn zu halten. Die
Vektorsumme von Gewichtskraft F G = m g und Normalkraft F N ergibt
diese Zentripetalkraft, welche das Ablösen des Massenpunkts von der rotierenden Erde verhindert.
Physik I, Prof. W. Fetscher, HS 2007
83
z
ω
FN
F ZP
FG
ϕ
x
R
Erde
Abbildung 3.28: Kräftegleichgewicht auf der Erde am Breitengrad ϕ. Die Vektorsumme von Gewichtskraft und Normalkraft ergibt die Zentripetalkraft, welche das Ablösen eines Gegenstands von der rotierenden Erde verhindert.
Man beachte: Die Gewichtskraft zeigt zum Erdmittelpunkt hin (Kugelsymmetrie), die Zentripetalkraft liegt dagegen in einer zur Äquatorialebene parallelen Ebene (siehe Abb. 3.28) und zeigt zur Drehachse hin
(Zylindersymmetrie).
Aus Symmetriegründen genügt es, sich auf die xz-Ebene zu beschränken.
⇒
F ZP = −m aZP · x̂ = −m
v2
· x̂
r
(3.150)
Es ist
⇒
r = R cos ϕ
2πr
v=
T
v2
4π 2 r
=
,
r
T2
(3.151)
(3.152)
(3.153)
wobei R = 6 378 km der Erdradius und T = 24 h die Rotationsperiode sind.
⇒
aZP ≈ 0,034 · cos ϕ m/s2
(3.154)
84
Physik I, Prof. W. Fetscher, HS 2007
Wir lösen Gl. (3.149) nach F N auf und erhalten in Komponentenschreibweise:
F N = F ZP − F G
g cos ϕ − aZP
FN,x
0
0 = m
(3.155)
g sin ϕ
FN,z
s
⇒
|F N | =
q
2
FN,x
+
2
FN,z
r
≈ mg
1−2
aZP
1−2
cos ϕ +
g
= mg
aZP
cos ϕ ,
g
Damit gilt
FN < mg
FN = mg
3.11
(3.156)
da aZP g
π
2
π
für ϕ =
2
aZP
g
2
(3.157)
(3.158)
für ϕ <
(3.159)
Beschleunigte Bezugssysteme - Schein”
kräfte“
Wir beschreiben im Folgenden die Bewegung eine Massenpunktes in einem
beschleunigten Bezugssystem K0 (siehe Abb. 3.29). Es gilt16
r 0 = x0 ex0 + y 0 ey0 + z 0 ez0
(3.160)
v 0 = ẋ0 ex0 + ẏ 0 ey0 + ż 0 ez0
(3.161)
a0 = ẍ0 ex0 + ÿ 0 ey0 + z̈ 0 ez0
(3.162)
Der Abstand des beschleunigten Systems K0 vom Inertialsystem K sei R =
R(t). Ausserdem rotiere es mit der konstanten Winkelgeschwindigkeit ω.
3.11.1
Geschwindigkeit
Im Inertialsystem K gilt:
⇒
r = R + r0
(3.163)
v = Ṙ + ṙ 0 = V + ṙ 0
(3.164)
Man beachte, dass im System K0 die Basis-Einheitsvektoren ex0 , ey0 und ez0 zeitlich
konstant sind, da der Ortsvektor von m ja gerade durch diese Vektoren ausgedrückt wird!
16
Physik I, Prof. W. Fetscher, HS 2007
85
ω
0
ez
0
K
m
0
r
(t)
e y0
K
O0
r(
t)
ez
t)
R(
e x0
ey
O
r(t) = R(t) + r 0 (t)
ex
Abbildung 3.29: Beschleunigtes Bezugssystem K0 .
Dabei ist V die Geschwindigkeit, mit der sich der Koordinatenursprung O0 von
K0 vom Koordinatenursprung O entfernt.
Bei der Berechnung von ṙ 0 müssen wir berücksichtigen, dass, vom Inertialsystem K aus gesehen, im allgemeinen Fall nicht nur die Komponenten x0 , y 0 und
z 0 von der Zeit abhängen, sondern auch die Basisvektoren ex0 , ey0 und ez0 .
ṙ 0 = {ẋ0 ex0 + ẏ 0 ey0 + ż 0 ez0 } + {x0 ėx0 + y 0 ėy0 + z 0 ėz0 }
|
{z
} |
{z
}
=v 0
:=u
0
=v +u
(3.165)
Die Geschwindigkeit u ist damit eine Folge der Rotation von K0 und muss
deshalb proportional zur Winkelgeschwindigkeit ω sein.
In Kap. 2.5.6 hatten wir die folgende Beziehung hergeleitet (Gl. (2.68)):
ėk = ω × ek
⇒ u = x0 ėx0 + y 0 ėy0 + z 0 ėz0
= x0 (ω × ex0 ) + y 0 (ω × ey0 ) + z 0 (ω × ez0 )
= ω × (x0 ex0 + y 0 ey0 + z 0 ez0 )
⇒ u = ω × r0
(3.166)
86
Physik I, Prof. W. Fetscher, HS 2007
Damit erhalten wir für die Geschwindigkeit v des Massenpunktes in K:
v = V + v0 + ω × r0
(3.167)
Diese Geschwindigkeit setzt sich demnach aus den folgenden drei Termen zusammen:
Geschwindigkeit von O0 bezüglich O
V
v0
Geschwindigkeit von m in K0
ω × r 0 Rotation von K0
3.11.2
Beschleunigung
Die Beschleunigung a des Massenpunktes in K erhalten wir aus Gl. (3.167)
durch Ableiten nach der Zeit; die Winkelgeschwindigkeit hatten wir als konstant angenommen.
a ≡ v̇ = V̇ + v̇ 0 + ω × ṙ 0
(3.168)
Der Term V̇ := A bezeichnet die Beschleunigung von O0 bezüglich O.
Der Term v̇ 0 berechnet sich wie folgt:
v̇ 0 = {ẍ0 ex0 + ÿ 0 ey0 + z̈ 0 ez0 } + {ẋ0 ėx0 + ẏ 0 ėy0 + ż 0 ėz0 }
{z
} |
{z
}
|
=a0
0
(3.169)
=ω×v 0
= a0 + ω × v
(3.170)
Der 2. Term in Gl. (3.169) wurde dabei mit der in Gl. (3.166) angewendeten
Methode hergeleitet.
Wir formen nun noch den 3. und letzten Term in Gl. (3.168) um:
ω × ṙ 0 = ω × (v 0 + ω × r 0 )
= ω × v 0 + ω × (ω × r 0 )
(3.171)
Insgesamt ergibt sich für die Beschleunigung a des Massenpunktes in K:
a = a0 + A + 2 ω × v 0 + ω × (ω × r 0 )
(3.172)
Diese Beschleunigung setzt sich demnach aus den folgenden vier Termen zusammen:
A
Beschleunigung von O0 bezüglich O
a0
Beschleunigung von m in K0
aC := −2 ω × v 0
Rotation von K0 , Coriolis-Beschleunigung
aZP := ω × (ω × r 0 ) Rotation von K0 , Zentripetal-Beschleunigung
Physik I, Prof. W. Fetscher, HS 2007
87
Wir untersuchen den letzten Term für den Fall, dass ω in Richtung z-Achse
zeigt und r 0 in der xy-Ebene liegt. Dieser Term lässt sich wie folgt umformen:
ω × (ω × r 0 ) = ω · (ω · r 0 ) −r 0 · ω 2
| {z }
=0
= −r 0 · ω 2
(3.173)
Dies ist offensichtlich eine Zentripetalbeschleunigung.
3.11.3
Scheinkräfte
In einem Inertialsystem gilt (für konstante Masse) das 2. Newtonsche Axiom
in der folgenden Form:
ẍ
F = m a = m ÿ
(3.174)
z̈
Die Gl. (3.172) lässt erkennen, dass der einfache Ausdruck a für die Beschleunigung im Inertialsystem, ausgedrückt durch dessen Koordinaten, durch einen
recht komplizierten Ausdruck ersetzt werden muss, wenn man die Beschleunigung durch die Koordinaten des beschleunigten Systems ausdrücken will.
Um auch im beschleunigten System die Beziehung zwischen Kraft und Masse
einfach ausdrücken zu können, verlangt man, dass
0
ẍ
0
0
(3.175)
F = m a = m ÿ 0
z̈ 0
gilt. Dies bewirkt aber, dass man zusätzliche Terme einführen muss. Aus Gl.
(3.172) folgt nämlich:
⇒
F 0 = m a0 = ma − m · {A + 2 ω × v 0 + ω × (ω × r 0 )}
(3.176)
0
0
0
F = F + {−mA} + {−2 m (ω × v )} + {−m ω × (ω × r )} (3.177)
Wir können also schreiben:
F 0 = F + F T + F C + F ZF
mit
F T = −mA
:= maT
(Trägheitskraft)
F C = −2 m (ω × v 0 )
:= maC
(Corioliskraft)
F ZF = −m ω × (ω × r 0 ) := maZF (Zentrifugalkraft)
(3.178)
88
Physik I, Prof. W. Fetscher, HS 2007
Man nennt diese drei Kräfte Scheinkräfte, da sie nur im beschleunigten System auftreten. In Inertialsystemen sind A = 0 (keine geradlinige Beschleunigung) und ω = 0 (keine Rotation). Damit verschwinden alle drei Scheinkräfte,
wie erwartet.
Man beachte, dass hier der Zusammenhang zwischen Corioliskraft- und Beschleunigung derselbe wie zwischen Zentrifugalkraft und -beschleunigung ist:
F C = + m aC
F ZF = + m aZF ,
(3.179)
(3.180)
dass aber in einem Teil der Fachliteratur die Coriolisbeschleunigung ein negatives Vorzeichen enthält.
Man beachte ferner auch, dass alle drei Scheinkräfte stets proportional zur
Masse m sind, während dies für echte Kräfte nicht unbedingt gilt (z.B. für die
Coulombkraft).
Damit ergeben sich folgende Situationen:
a) Falls a0 = 0 ist, obwohl eine äussere (echte) Kraft wirkt:
⇒
F + F T + F C + F ZF = ma0 = 0 ,
(3.181)
Das bedeutet, dass der Massenpunkt im beschleunigten System in Ruhe
bleibt, obwohl eine äussere Kraft wirkt! Dies wird erklärt durch ein scheinbares Kräftegleichgewicht, bei dem die Scheinkräfte die äussere Kraft
kompensieren.
Das ist jedoch kein echtes Kräftegleichgewicht, da F T , F C und F ZF keine
echten Kräfte sind.
b) Falls die äussere Kraft F = 0 ist:
⇒
m a0 = 0 + m aT + m aC + m aZF
⇔ a0 = aT + aC + aZF
(3.182)
(3.183)
Das bedeutet, dass im beschleunigten System die Masse m beschleunigt wird,
obwohl keine echte Kraft wirkt.
Widerspruch zum 2. Newtonschen Axiom?
Dies ist der Grund für die Einführung des Terms Scheinkräfte“.
”
3.11.4
Echte“ Kräfte und Beschleunigungen
”
Die echte“ Beschleunigung ae ist das a auf der linken Seite von Gl. 3.172. Echt
”
bedeutet, dass diese Beschleunigung, wie jeder andere Vektor, unabhängig vom
Bezugssystem ist, ebenso wie echte Kräfte F e .
Physik I, Prof. W. Fetscher, HS 2007
89
Es gilt also nur in Inertialsystemen:
ẍ
ae = a = ÿ
z̈
und F e = m ae
(3.184)
(3.185)
Erklärung von Situation a) in Kap. 3.11.3:
Nur äussere echte Kräfte F i , (i = 1 . . . n) bewirken Beschleunigungen:
n
X
F i = m ae
(3.186)
i=1
Im System K0 ist
n
X
F i = m a0 − F T − F C − F ZF
(3.187)
ẍ0
a0 ≡ ÿ 0 = 0
z̈ 0
(3.188)
F i + F T + F C + F ZF = 0
(3.189)
i=1
⇒
Dies ist möglich, falls
n
X
i=1
Beispiel dazu: Frei fallender Aufzug
Der frei fallende Aufzug ist ein linear beschleunigtes System K0 mit ω = 0.
Eine Person im Aufzug ist relativ dazu in Ruhe, d.h. v 0 = 0. Daraus folgt:
1) Echte auf Person wirkende Kraft:
Fe = mg
(3.190)
(g ist nach unten gerichtet.)
2) Beschleunigung A des Fahrstuhls, vom Inertialsystem aus gesehen:
A=g
(3.191)
90
Physik I, Prof. W. Fetscher, HS 2007
⇒ F e = m ae
⇔ m g = m a0 + m A
= m a0 + m g
⇒ m a0 = 0 ⇔ a0 = 0 !
(3.192)
(3.193)
Wir sehen also, dass die Beschleunigung a0 , vom Aufzug aus gesehen, gleich
null ist, obwohl eindeutig eine äussere Kraft wirkt.
Erklärung von Situation b) in Kap. 3.10.3:
Falls die Summe der äusseren echten Kräfte gleich null ist, also
n
X
Fi = 0
i=1
⇒ 0 = m ae = m a0 − m aT − m aC − m aZF
⇔ a0 = aT + aC + aZF 6= 0
(3.194)
(3.195)
Im beschleunigten System wird also eine Beschleunigung wahrgenommen, obwohl keine äusseren Kräfte wirken.
Gl. (3.195) ist eine gekoppelte Differentialgleichung 2. Ordnung in den
Variablen x0 , y 0 und z 0 . Die allgemeine Lösung liefert eine komplizierte Bahnkurve
0
x (t)
r 0 (t) = y 0 (t) ,
(3.196)
0
z (t)
in K0 , auch wenn die Summe der äusseren Kräfte null beträgt!
3.11.4.1
Beispiel: Rotation in einer Ebene
Wir betrachten ein beschleunigtes Bezugssystem K0 , das mit der konstanten
Winkelgeschwindigkeit ω um die z-Achse des Inertialsystems K rotiert, und
dessen Ursprung und z 0 -Achse mit dem Ursprung und der z-Achse von K zusammenfallen (siehe Abb. 3.30):
0
0
ω=
(3.197)
ω
Für die folgende Rechnung vereinfachen wir die Voraussetzungen wie folgt: Zum
Zeitpunkt t = 0 läuft ein Massenpunkt m mit der Geschwindigkeit v 0 = v0 in
y-Richtung los:
0
v 0 (0) = v0
(3.198)
0
Physik I, Prof. W. Fetscher, HS 2007
91
F C = −2 m (ω × v 0 )
F ZF = −m ω × (ω × r 0 )
z0 = z
ω
v0
v 0k
y0
O
r0 m
v 0⊥
ω
x0
FC
F ZF
Abbildung 3.30: Coriolis- und Zentrifugalkraft in einem sich mit konstanter
Winkelgeschwindigkeit drehendem Bezugssystem K0 .
Da die Geschwindigkeit im beschleunigten System gegeben ist, wirken in diesem
System die Corioliskraft FC und die Zentrifugalkraft FZF :
FC = −2 m (ω × v 0 )
0
vx
0
vy0
0
= −2 m
×
ω
0
0
−ωvy0
ẏ
0
−ẋ0
ωvx
= −2 m
= 2mω
0
0
(3.199)
(3.200)
(3.201)
Nach Gl. (3.173) ist
x0
= mω 2 r 0 = mω 2 y 0
z0
FZF
Damit erhalten wir die folgende Differentialgleichung:
0
ẍ
−2ω ẏ 0 + ω 2 x0
ÿ 0 = 2ω ẋ0 + ω 2 y 0
z̈ 0
0
(3.202)
(3.203)
92
Physik I, Prof. W. Fetscher, HS 2007
Diese Differentialgleichung ist im allgemeinen schwierig zu lösen. Wir wollen
hier aber eine teilweise Integration durchführen, die zu einem interessanten
Ergebnis führt.
Da wir ein ebenes Problem haben, vernachlässigen wir die z-Komponente:
ẍ0 = −2ω ẏ 0 + ω 2 x0
ÿ 0 = +2ω ẋ0 + ω 2 y 0
z̈ 0 = 0
(3.204)
(3.205)
(3.206)
Wir multiplizieren die 1. Gleichung mit ẋ0 und die 2. mit ẏ 0 und summieren die
beiden Gleichungen.
ẍ0 ẋ0 = −2ω ẏ 0 ẋ0 +ω 2 x0 ẋ0
ÿ 0 ẏ 0 = +2ω ẋ0 ẏ 0 +ω 2 y 0 ẏ 0
ẍ0 ẋ0 + ÿ 0 ẏ 0 =
+ω 2 x0 ẋ0 + ω 2 y 0 ẏ 0
(3.207)
Die dabei erhaltene Gleichung können wir mit einem Trick integrieren: Wir
drücken einen Teil der Zeitableitungen explizit durch die Differentiale aus und
multiplizieren in der 2. Zeile die Gleichung mit dt. In der 3. Zeile führen wir
dann die Integration durch:
ẋ0 ·
⇒
dẏ 0
dx0
dy 0
dẋ0
+ ẏ 0 ·
= ω 2 x0 ·
+ ω2y0 ·
dt
dt
dt
dt
(3.208)
ẋ0 dẋ0 + ẏ 0 dẏ 0 = ω 2 x0 dx0 + ω 2 y 0 dy 0
(3.209)
1 02
ẋ
2
+ 21 ẏ 02 = 12 ω 2 x02 + 21 ω 2 y 02 + c
(3.210)
Die Konstante c können wir mit den Anfangsbedingungen x0 (0) = y 0 (0) =
ẋ0 (0) = 0 und ẏ 0 (0) = v0 bestimmen:
⇒
c = 21 mv02
(3.211)
Mit r0 2 = x0 2 + y 0 2 und v 0 2 = ẋ02 + ẏ 02 folgt
2
⇒
3.11.4.2
2
v02 = v 0 − ω 2 r0
q
v 0 = v02 + ω 2 r0 2
(3.212)
Corioliseffekt auf der Erdoberfläche
Abb. 3.31 demonstriert die Wirkung der Erdrotation auf ein mit der Geschwindigeit v 0 bewegtes Massenelement. Die Corioliskraft
F C = 2 m v0 × ω
Physik I, Prof. W. Fetscher, HS 2007
93
ω
v0
N
z0
FC
m
ω
r0
O
ϕ
y0
x0
S
Abbildung 3.31: Corioliskraft auf dem Breitengrad ϕ auf der Erdoberfläche.
bewirkt auf der Nordhalbkugel, dass ein Südwind nach Osten abgelenkt wird,
ein Nordwind dagegen nach Westen. Dieser Effekt bewirkt, dass die von einem
Hoch zu einem Tief strömende Luft auf der Nordhalbkugel stets nach rechts
abgelenkt wird, was einen Wirbel entgegengesetzt zum Uhrzeigersinn um das
Tief herum verursacht (siehe Abb. 3.32).
3.11.4.3
Foucault-Pendel
Mit einem Pendel genügend grosser Schwingungsdauer lässt es sich zeigen,
dass sich während der Pendelschwingung die Erde unter dem Pendel dreht. Im
System der sich drehenden Erde wird diese Wirkung durch die Corioliskraft
hervorgerufen (siehe Abb. 3.33).
Auf dem Breitengrad ϕ ist
⇒
F C = 2 m v0 × ω⊥ + ωk = 2 m v0 × ω⊥
|F C | = m v 0 ω⊥ = m v 0 ω sin ϕ
(3.213)
(3.214)
94
Physik I, Prof. W. Fetscher, HS 2007
v
aC
aC
v
Abbildung 3.32: Tiefdruckgebiet über Island. Die Coriolisbeschleunigung aC
verursacht auf der Nordhalbkugel eine Ablenkung der vom Hoch zum Tief fliessenden Luft nach rechts, was den Wirbel in entgegengesetztem Uhrzeigersinn
bewirkt. (Bild NASA: Iceland.A2003247.1410.1km.pdf.)
Das Pendel schwinge mit der Winkelgeschwindigkeit Ω bzw. der Periode T =
2π/Ω (siehe Abb. 3.34) zunächst in der y 0 z 0 -Ebene, wobei z 0 die vertikale Achse
darstellt. Damit sind die Einheitsvektoren ŷ 0 und ẑ 0 gegeben durch:
ωk
ŷ 0 = ωk
und ẑ 0 =
ω⊥
|ω ⊥ |
(3.215)
Wegen der grossen Drahtlänge kann man die Pendelbewegung als lineare
Schwingung in y 0 darstellen:
y 0 = A cos Ωt
ẏ 0 = −A Ω sin Ωt
(3.216)
(3.217)
Die Corioliskraft bewirkt eine kleine Beschleunigung in x0 -Richtung, so dass
nach einer halben Periode zur Zeit t = T /2 der Endpunkt der Schwingung nicht
mehr bei (0, −A), sondern bei (∆x0 , −A) liegt. Wir haben dabei berücksichtigt,
Physik I, Prof. W. Fetscher, HS 2007
95
ω
ϕ
z
ω
ωk
ω⊥
ϕ
y
R
Erde
ω⊥ = ω sin ϕ
Abbildung 3.33: Geometrie des Foucaultpendels
dass wegen ω Ω folgt:
∆x0 A
Damit dreht sich die Schwingungsebene während einer halben Periode um den
kleinen Winkel ∆α.
Es ist
⇒
ẍ0 (t) = −2 ẏ 0 ω⊥
= 2 A Ω ω⊥ sin Ωt
t
1
0
0
ẋ (t) = 2 A Ω ω⊥ − cos Ωt
Ω
0
= 2 A ω⊥ (1 − cos Ωt)
(3.218)
(3.219)
Die kleine Auslenkung ∆x0 beträgt damit:
T /2
1
0
0
∆x = 2 A ω⊥ t − sin Ωt
Ω
0
= A ω⊥ T
∆x0
T
∆α =
= ω⊥
2A
2
0
⇒
(3.220)
(3.221)
96
Physik I, Prof. W. Fetscher, HS 2007
ẍ0
t=
T
2
t=0
y0
−A
0
A
ẋ0
t=
T
2
t=0
y0
−A
0
A
Abbildung 3.34: Zur Drehung der Schwingungsebene beim Foucaultpendel. Das
Pendel schwingt zunächst in der y 0 z 0 -Ebene. Das obere Diagramm zeigt die
transversale Beschleunigung ẍ0 (t), das untere die transversale Geschwindigkeit
ẋ0 (t) während einer halben Periode. Dies führt zu einer effektiven Ablenkung
in x0 -Richtung.
Die Winkelgeschwindigkeit α̇ beträgt demnach:
α̇ =
∆α
= ω⊥
T /2
(3.222)