Kapitel 1 Magnetostatik
Werbung

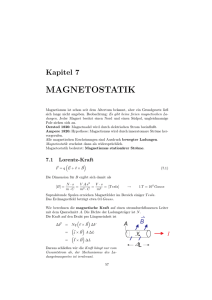
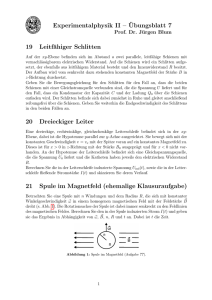
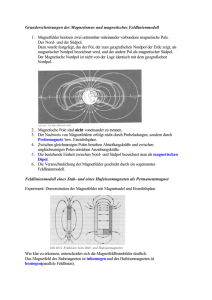
Kapitel 1 Magnetostatik Die mit Magnetfeldern verbundenen Erscheinungen haben die Menschheit immer fasziniert, angefangen mit den Griechen. Wir betrachten, als einfache Illustration, eine Spule, die mit feinem Magnetpulver (z.B Eisenspänen) gefüllt ist. Magnetpulver besteht aus magnetischen Körnern, die sich entlang Abbildung 1.1: Photographie eines Feldlinienbildes einer Spule den magnetischen Feldlinien ansammeln. Deswegen kann man Eisenspäne zum Visualisieren von Magnetfeldern benutzen. Schicken wir Strom durch die Spule, so entsteht aus einer unregelmässigen Verteilung der Eisenspäne eine ziemlich geordnete Anordnung - ein klarer Hinweis, dass ’Etwas’ die Eisenspäne an bestimmte Orte zwingt. Es kann nicht das Resultat der Coulomb Kraft sein: die im Draht fliessenden Elektronen sind von einer genau gleichen Anzahl positiver Ladungen umgeben, so dass die resultierende Coulomb Kraft genau 0 ist. Dieses ’Etwas’ muss mit der Anwesenheit bewegter Ladungen verbunden sein: bevor man den Strom eingeschaltet hat, waren die Magnetkörner ungeordnet. Dieses so faszinierende ’Etwas’ ist das Magnetfeld ~ das eine Kraft auf die Magnetkörner ausübt, sodass sie sich entlang der B, 1 KAPITEL 1. MAGNETOSTATIK 2 Feldlinien ansammeln. Der Erste, der den Zusammenhang zwischen Strom und Magnetfeld bemerkt hat, ist H.C. Oersted (1819). Er schaffte es, eine Kompassnadel - ein magnetisches Objekt, das sich vorzüglich in Magnetfeldrichtung orientiert - durch das Einschalten von Strom zu beeinflussen. Er beobachtete, dass die Nadel je nach Stromrichtung in die eine oder andere entgegengesetzte Richtung zeigte. Und das alles kann weder die Coulombnoch die Gravitationskraft verursachen! Kurz danach (1820) entdeckte Ampere, dass zwischen zwei stromdurchflossener Drähte eine Kraft existiert, und das wiederum trotz der Neutralität der Drähte. Diese Beobachtungen wurden korrekt mit der Existenz eines weiteren Feldes, was weder mit der Gravitation noch mit dem elektrischen Feld zu tun hatte. Obwohl die Existenz eines Ma~ neben dem elektrischen Feld E ~ lange Zeit bekannt war und von gnetfeldes B Maxwell sogar in einem Satz von Gleichungen kodifiziert wurde, blieb der eigentliche Ursprung des Magnetfeldes, anders als beim elektrischen Feld, auch zu den Zeiten von Maxwell unklar. Der wichtigste Ingredient zur Erzeugung von Magnetfeldern ist der Strom, welchen wir ausführlich behandeln werden. ~ ist die Relativitätstheorie von Der zweite Ingredient zur Erzeugung von B ~ durch bewegte Ladungen ist ein relativiEinstein: die Erzeugung von B stischer Effekt. Das konnten die Ampere und Oersted nicht wissen! Wir werden dennoch die Gesetze der Magnetostatik durch den von Oersted, Ampere und Kollegen eingeschlagenen– phänomenologischen – Weg einführen. 1.1 Der elektrische Strom Wir führen den elektrischen Strom in einem 1-dimensionalen (Draht) Modell ein. Elektrischer Strom entsteht folgendermassen. Man denke sich einen Draht aus Metall (typischerweise Cu) und eine Quelle von Ladungen (eine Batterie, ein Netzgerät). Man bringe diese Ladungen an ein Ende des Drahtes. Das hervorgerufene Potential erreicht mit Lichtgeschwindigkeit (das werden wir später zeigen) das andere Ende des Drahtes. Sorgt man mit der Quelle dafür, dass dieses Ende bei einem unterschiedlichen Potential bleibt, dann ensteht eine Spannung zwischen den beiden Enden des Drahtes. Somit wird im Inneren des Metalls ein elektrisches Feld aufgebaut und beständig aufrechterhalten. Die freien Elektronen im elektrischen Feld bewegen sich nach der Newton Gleichung mẍ = q · Ex mit der Lösung ẋ = q · Ex · t/m. Betrachten wir eine Ladungsverteilung mit Teilchendichte ρ. Aufgrund der endlichen Geschwindigkeit in x-Richtung durchquert die Ladung △q = q · ρ · A · ẋ · △t die Fläche A im Zeitintervall △t. Daraus resultiert eine Stromdichte Jx (durchströmende Ladung pro Zeiteinheit und Flächeneinheit) gegeben durch 2 △q Jx = △t·A = ρ·qm ·t · Ex [Jx ] = Cb/(sec · m2 ) = A/m2 ). Nach dieser Gleichung KAPITEL 1. MAGNETOSTATIK 3 wächst der Strom linear mit der Zeit, was zu unendlich grossen Strömen führen würde. Diese Theorie des elektrischen Stroms ist natürlich unvollständig. In der Tat ist der Strom, der in einem Metalldraht fliesst, endlich. Es geschieht folgendes. Die Ladungsträger können nicht unbegrenzt beschleunigt werden. Denn, in Folge der Streuung der Kristallelektronen an Phononen und Gitterfehlern, verlieren die Elektronen ständig Energie, die sie nach der obigen Gleichung aus dem elektrischen Feld holen. Nach Einschalten des elektrischen Feldes stellt sich nach einer kurzen Zeit (etwa 10−15 sec) – eine sog. Relaxationszeit ein – ein stationärer Strom J~s , mit (Ohmschem Gesetz): ρq 2 · τ ~ ~ Js = ·E m Die Proportionalitätskonstante heisst elektrische Leitfähigkeit σ. Zu Js defi- Abbildung 1.2: Für einen Draht mit Länge l und Querschnitt A schreibt man l I = △V , mit △V = l · E, I = J · A und der Widerstand R = σ·A , [R] = R Ω (Ohm). Um Materialien hinsichtlich deren Leitfähigkeit zu vergleichen, definiert man den spezifischen Widerstand ρ = σ −1 = A · R/l.In der Tabelle erkennt man drei Gruppen von Stoffen: gute Leiter (L) mit sehr kleinem spezifischen Widerstand, Halbleiter (S) und Isolatoren (I). nieren wir eine Driftgeschwindigkeit vD durch die Gleichung Js = q·ρ·vD . Diese ist die mittlere Geschwindigkeit, mit welcher die Ladungen im Draht ”driften”. Typische Driftgeschwindigkeiten in einem Cu-Draht (ρ = 6 · 1022 /cm3 ) . js ≈ 2 · 10−3 m/sec. mit A = 1mm2 und I = 30 A sind : | vD |= ρ·q Mit dem Stromfluss ist eine Dissipation der Energie verknüpft. Da die Driftgeschwindigkeit konstant ist, wird die von der Quelle ausgeübte elektrische Kraft völlig von einer entgegengerichteten Reibungskraft neutralisiert. Diese 4 KAPITEL 1. MAGNETOSTATIK Reibungskraft – die die inelastischen Stösse simuliert – führt zur Dissipation der elektrischen Energie, die von der Quelle geliefert wird. Die elektrische Lei- Abbildung 1.3: Geometrie zur Berechnung der Jouleschen Wärme stung (= totale elektrische Arbeit pro Zeiteinheit), geleistet von der Quelle um eine totale Ladung ρqAl von ’a’ bis ’b’ zu transportieren, ist L = (tb − ta )−1 ρqAl · Z tb ta E · vdrif t dt = I 2 · R = △V · I Diese Leistung wird zunächst in Form von Joulscher Wärme an den Draht abgegeben. Wird die Temperatur des Drahtes aufgrund der abgegebenen Joulschen Wärme genügend erhöht, so beginnt der Draht Licht (Strahlung) zu emittieren: die Temperatur verursacht eine Bevölkerung der angeregten Zustände der Atome. Diese entleeren sich kurz danach, und geben ihre Energie in der Form von Strahlung wieder: elektrische Energie wird nicht nur in Wärme umgewandelt, sondern auch in Strahlung. Damit sind wir bei der wichtigsten Anwendung des elektrischen Stromes gelandet: durch diesen Mechanismus hat Edison unsere Nächte beleuchtet. Wird die Temperatur noch weiter erhöht, dann beginnen die Atome zu verdampfen: der Draht wird dünner. An gewissen Stellen kann der Draht ’explodieren’ so werden unsere Nächte dunkel. Die zweite wichtige Anwendung ist das Entstehen von Magnetfeldern. Die Kontinuitätsgleichung Im Allgemeinen charakterisiert man bewegliche Ladungen mit einer Strom~ dichte ~j(~r, t). Der Einheitsvektor |~jj| ist die Normale in Bewegungsrichtung der fliessenden Ladungen. Deren Betrag | ~j | gibt die Ladung an, die pro Zeiteinheit durch die Flächeneinheit senkrecht zur Stromrichtung transportiert wird. Als Stromstärke durch eine vorgegebene Fläche S bezeichent man das Flächenintegral Z ~ I = ~j · dS R S ~ sei der Strom durch die Oberfläche des Volumens V und ∂ R ρdV ~j · dS ∂t V ist die zeitliche änderung der Gesamtladung des Volumens V . Die LadungsS(V ) 5 KAPITEL 1. MAGNETOSTATIK erhaltung besagt, dass Z V dV ∂ρ =− ∂t Z S(V ) ~ ~j · dS ist, d.h. die zeitliche Änderung der Ladung im Volumen V muss dem Ladungsstrom durch die Oberfläche S entgegegesetzt gleich sein. Das Oberflächenitegral an der linken Seite lässt sich in einem Volumenintegral umschreiben, so dass die Ladungserhaltung mit der Kontinuitätsgleichung ∂ρ ~ ~ +∇·j = 0 ∂t = 0 relevant. identisch ist. Für die Magnetostatik ist der stationäre Fall ∂ρ ∂t ~ ~j = 0, d.h. durch jeden Querschnitt fliesst der selbe Im stationären Fall ist ∇· Strom und die Summe aller zufliessenden Ströme an einem Leiterknoten ist gleich der Summe der abfliessenden Ströme (Kirchhoffsche Knotenregel). I3 I5 S(V) ~ dS F1 I4 I1 I2 S(V ) F2 Abbildung 1.4: 1.2 Die Gesetze der Magnetostatik Die phänomenologischen Beobachtungen von Ampere und Oersted zeigen, dass eine stationäre Stromdichte ~j(~r) die Quelle eines neuen Feldes ist, wel~ r ) genannt ist. Von Biot-Savart stammt ein Integralausches Magnetfeld B(~ ~ druck für das B-Feld einer beliebigen stationären Stromverteilung: ~ r ) = µ0 B(~ 4π Z V′ dV ′~j(~r′ ) × ~r − ~r′ | ~r − ~r′ |3 6 KAPITEL 1. MAGNETOSTATIK V ·s Die Kopplungskonstante µ0 = ǫ01·c2 = 4π10−7 A·m enthält die Lichtgeschwin~ digkeit und zeigt eindrucksvoll den Ursprung des B-Feldes: im Limes c → ~ [B] = ∞ (sogenannte nicht-relativistische Limes), verschwindet nämlich B. . V ·s = T (Tesla). Wie im Fall der Elektrostatik, lassen sich aus diesem Ausm2 druck äquivalente Formulierungen der Gesetze der Magnetostatik herleiten, welche oft einfacher zu benutzen sind als das Biot-Savart Integral. 1.2.1 1. Gesetz der Magnetostatik Wir benutzen die folgenden Identitäten um das Integral umzuschreiben: 1 ~r − ~r′ ~r = −∇ ′ 3 | ~r − ~r | | ~r − ~r′ | ~ ~ × (ψ~j) + ψ ∇ ~ × ~j ~j × ∇ψ = −∇ ~ Damit erhalten wir für das B-Feld ~ = µ0 ∇ ~ × B 4π Z V′ dV ′ ~j(~r′ ) | ~r − ~r′ | Da die Divergenz einer Rotation immer verschwindet, können wir schreiben ~ ·B ~ =0 ∇ Dieses Gesetz bedeutet, dass es keine magnetischen Ladungen (Monopole) gibt. Ampersche Gesetz Durch Verwendung der Identität ~ × (∇ ~ × A) ~ = ∇( ~ ∇ ~ · A) ~ − △A ~ ∇ und der partiellen Integration über eine beschränkte Stromverteilung können ~ explizit berechnen: wir die Rotation von B Z ~j(~r′ ) ) | ~r − ~r′ | Z Z 1 1 ′~ ′ ′ ~ ~ = = −∇ dV j(~r ) · ∇ − ~j(~r′ )△ ′ | ~r − ~r | | ~r − ~r′ | Z ~ ′ ~′ ~ dV ′ ∇ · j + 4π~j(~r) = ∇ | ~r − ~r′ | 4π ~ ~ = ∇ ~ × (∇ ~ × ·∇×B µ0 dV ′ 7 KAPITEL 1. MAGNETOSTATIK ~ · ~j = 0 für stationäre Ströme, verbleibt die Gleichung Da ∇ ~ ×B ~ = µ0~j ∇ Diese ist das Ampersche Gesetz. Mit Hilfe des Stokeschen Satzes lässt sich eine äquivalente Integralform ableiten. Es sei S eine Fläche und C ihr Rand. Dann Z Z Z ~ × B) ~ · ~ndS = ~ · d~s = µ0 ~jdS ~ = I · µ0 (∇ B S C S I ist die Gesamtstromstärke durch S und ~n der Normalvektor auf der Fläche. ~ um eine geschlossene Kurve Damit erhalten wir, dass Die Zirkulation von B C gleich dem Strom I durch die von C umschlossene Fläche multipliziert mit µ0 ist. I ~ · d~s = µ0 · I B C Die Grundgleichungen der Magnetostatik ~ ·B ~ =0 ∇ ~ ×B ~ = µ0 · ~j ∇ ~ ·∇ ~ ×A ~ = 0, lässt sich B ~ als können weiter umformuliert werden. Da ∇ ~ =∇ ~ ×A ~ B ~ ist das Vektorpotential. Das Vektorpotential ist nur bis auf den schreiben. A Gradienten einer skalaren Funktion bestimmt: wir können stets die Eichtrans~ ′ = A+gradϕ ~ formation A vormehmen, ohne etwas am Magnetfeld zu ändern. Das skalare Feld ist ein Eichfreiheitsgrad des Magnetfeldes. Um eine Eindeutigkeit des Vektorpotentials zu erreichen, brauchen wir noch eine zusätzliche ~ = 0 (Coulomb Eichung), die Vektorrelation Festlegung. Durch die Wahl div A ~ × (∇ ~ × A) ~ = ∇( ~ ∇ ~ · A) ~ − △A ~ ∇ und das Ampersche Gesetz, erhalten wir ~ = −µ0~j △A Diese Gleichung entspricht die Poissongleichung der Elektrostatik. Die formelle Lösung kennen wir: aus ~ × ~ = µ0 ∇ B 4π folgt ~ = µ0 A 4π Z Z V′ V′ dV ′ dV ′ ~j(~r′ ) | ~r − ~r′ | ~j(~r′ ) | ~r − ~r′ | 8 KAPITEL 1. MAGNETOSTATIK 1.3 Magnetische Felder einfacher Stromverteilungen Feld eines Stromfadens Unter dem Konzept eines Stromfadens versteht man einen linienförmigen Strom I längs eines Weges C. Wir paramatrisieren C nach der Bogenlänge C dr S Abbildung 1.5: s, d.h. ~r = ~r(s). In jedem Punkt der Bahn sei ~t der Tangentialeinheitsvektor. Dann gilt d~r = ds · ~t ~ = df · ~t dS ~ · d~t = df · ds dV = dS Somit erhalten wir und ~jdV = j~tdf ds = I~t(s)ds Z I · ~t(s) × (~r − ~r′ (s)) ~ r ) = µ0 ds B(~ 4π C | ~r − ~r′ (s) |3 Feld eines unendlich langen geradlinigen Drahtes Als Anwendung der obigen Formel betrachten wir ~t = (0, 0, 1), C als unendlich lang und setzen als Parameter s die Koordinate z ′ . Darüberhinaus 9 KAPITEL 1. MAGNETOSTATIK betrachten wir, o.E.d.A., z = 0. Somit gilt Z ∞ (0, 0, 1) × (x, y, −z ′ ) ~ r ) = µ0 · I B(~ dz ′ 4π −∞ (x2 + y 2 + z ′2 )3/2 Z ∞ µ0 · I 1 = (−y, x, 0) dz ′ 2 2 4π −∞ (x + y + z ′2 )3/2 µ0 · I (−y, x, 0) = 2π (x2 + y 2 ) ~ = B (−y,x,0) ~ ”zirkuliert” Am Ort ~r = x, y, z finden wir ein Vektorfeld B .B (x2 +y 2 )1/2 ~ | hätten wir auch aus der Integralin einer zum Draht senkrechten Ebene. | B form des Amperschen Gesetzes herleiten können, mit der Annahme, dass die Feldlinien Kreise in einer zum Draht senkrechten Ebene sind. Man betrachte als Stokessche Kontur eine dieser Kreisen (Rechnung in Polarkoordinaten): Z 2π 0 d.h. B = Brdϕ = µ0 · I µ0 ·I . 2π·r Feld einer unendlich langen Spule Die Spule habe n-Windungen pro Längeneinheit. Aus der Vektorkonstrukti~ nach Biot-Savart vermuten wir, dass B ~ – falls es existiert on des Feldes B – parallel zur Spulenachse verläuft. Man kann zeigen, dass ausserhalb der ~ genau 0 ist: äquivalente Teile der Spule liefern einen gleichen aber Spule B ~ an einem Ort ausserhalb der entgegengesetzten Beitrag zur Bildung von B Spule. Das Feld im Innern der Spule finden wir, indem wir das Amp. Gesetz auf eine fiktive Schleife C (siehe Figur) anwenden. Aus Z C ~ i · d~l =| B ~ i | ·l B ~ i |= µ0 · n · I: B ~ verläuft parallel zur Spulenachse und Itot = n · l · I folgt | B ist innerhalb der Spule homogen. Das Feld einer Stromschleife Wir benutzen die Identität Z S ~ ~n × ∇ψdS = I C ψ~tds 10 KAPITEL 1. MAGNETOSTATIK C I Abbildung 1.6: Anwendung des Amperschen Gesetzes auf eine Spule ~ um das A-Feld einer Stromschleife C, welche eine Fläche S umrandt, zu berechnen: ~ = µ0 · I A 4π Z C Z ~t(s) µ0 · I 1 ~ r′ ds = ds ~n × ∇ ′ | ~r − ~r (s) | 4π S | ~r − ~r′ (s) | 1 ~r | ~r′ | ∇ = + O( ) | ~r − ~r′ (s) | | ~r |3 | ~r |3 r′ Für kleine Schleifen R ~ × ~r . µ0 m ~ r) = µ0 I · S ~ndS × ~r = A(~ 3 4π | ~r | 4π | ~r |3 mit m ~ =I· R S ~ndS das magnetische Dipolmoment. Mit ~ m ~ × ~r ~ × m =∇ 3 | ~r | | ~r | erhalten wir ~ ~ × (∇ ~ × m ~ r ) = µ0 ∇ ) B(~ 4π | ~r | ~ µ0 1 µ0 ~ ~ m ∇(∇ · )− m ~△ = 4π | ~r | 4π | ~r | µ0 ~ ~ 1 ) + µ0 · m = ∇(m ~ ·∇ ~ · δ(~r) 4π | ~r | ~ ~ Die erste Komponente des B-Feldes ist identisch mit dem E-Feld eines elektrischen Dipols: Die Vorstellung, dass magnetische Dipole aus magnetische ~ Ladungen bestehen, vermag das B-Feld fast korrekt zu beschreiben. Der Unterschied manifestiert sich in der Tat nur am Ort des Dipols. 11 KAPITEL 1. MAGNETOSTATIK 1.4 Die Lorentz-Kraft Die Experimente von Ampere haben eindrucksvoll gezeigt, dass ein stromdurchflossener Leiter ”1” eine Kraft auf einen stromdurchflossenen Leiter ”2” ausübt. Seine Entdekungen können wie folgt mathematisch beschrieben t2 B1 1 2 I2 I1 Abbildung 1.7: werden: F~1→2 = I2 Z C2 ~ 1 (~r(s2 ))ds2 ~t(s2 ) × B ~ 1 (~r(s2 )) ist das vom Leiter1 am Ort ~r2 ausgeübte Magnetfeld. Als Beispiel B für die Anwendung dieser Formel betrachten wir die Kraft zwischen zwei lange geradlinigen Stromfäden im Abstabnd ρ voneinander. Am Ort des Leiters ~ 1 = µ0 ·I ~eϕ . Die von ”1” ausgeübte Kraft pro ”2” existiert ein Magnetfeld B 2π·ρ Längeneinheit ist nach innen radialgerichtet (siehe Figur) und beträgt µ0 · I1 · I2 1 2π · ρ 2L Z L −L dz = µ0 · I1 · I2 2π · ρ Aus dieser Formel haben 1856 Kohlrausch und Weber die Konstante µ0 experimentell bestimmt. Später bemerkte Kirchoff die Ähnlichkeit mit ǫ01·c2 . Unter Ausnutzung der Relation I~tds = ~j(~r)dV können wir die Kraft, die eine beliebige Stromverteilung innerhalb eines Volumens V in einem äusseren ~ r ) erfährt, ausdrucken. Magnetfeld B(~ F~ = Z V ~ r) dV ~j(~r) × B(~ Für eine Punktladung q, die sich mit der Geschwindigkeit ~v (~r) bewegt, gilt ~j(~r) = q · ~v (~r) · δ(~r − ~r(t)) Einsetzen führt auf die Lorentz-Kraft ~ r (t))] F~ = q · [~v (~r(t)) × B(~ 12 KAPITEL 1. MAGNETOSTATIK I1 I2 r F2-1 F1-2 Abbildung 1.8: 1.5 Magnetostatik in der Materie ~ Das A-Feld einer kontinuierlichen Verteilung magnetischer Momente erhalten ~ r ′ ) · dV ′ , wobei M ~ der Magnetisierungsvektor ist. wir, durch m ~ = M(~ ~ r ) = µ0 · ∇ ~ × A(~ 4π Z ~′ ~ r′) ~ r′) µ0 M(~ ′ ∇ × M (~ = dV dV | ~r − ~r′ | 4π V ′ | ~r − ~r′ | V′ Z ′ ~ ×M ~ entspricht. Eine solche kontiwas einer effektiven Stromdichte ~jM = ∇ nuierliche Verteilung kleiner Stromschleifen bestand, nach Ampere, am Ort der Atome in magnetischen Materialien. In Anwesenheit von Materie muss das Ampersche Gesetz diese effektiven atomare Strömen berücksichtigen. ~ ×B ~ = µ0 [~j + ∇ ~ ×M ~] ∇ Die klassische Vorstellung atomarer Kreisströme liefert eine formal exakte ~ (~r) kann aber Gleichung. Das in dieser Gleichung vorkommende Vektorfeld M nur quantenmechanisch gerechtfertig werden. In der QM (siehe Physik IV) ~ zeigt man, dass sich die Energie eines Atoms durch Anlegen eines Feldes B ändert. Diese Aenderung setzt sich aus zwei Termen zusammen: ~ + αD · B ~2 △Em = −~µ · B Der erste Term, der für den Paramagnetismus der Materie verantwortlich ist, ist proportional zur Feldstärke: die Proportionalitätskonstante nennt man magnetisches (Dipol)Moment des Atoms. Die Einheit für ~µ ist 13 KAPITEL 1. MAGNETOSTATIK Joule/Tesla. ~µ schreibt man oft in Einheiten einer fundamentalen Grösse, das Bohrsche Magneton µB = 9.27410−24 J/T . Dieser Term erinnert an die Energie eines elektrischen Dipolmomentes in einem elektrischen Feld: ~ ein klasder Unterschied liegt darin, dass die elektrische Energie −~p · E sisches Resultat ist, während Em rein quantenmechanischen Urprungs ist. Genau gesagt: der Ursprung von ~µ liegt in der Dirac Gleichung der relativistischen Quantenmechanik. In der Quantenmechanik findet man ~ (gL : Lande Faktor, J: ~ der Drehimpulsvektor des atomaren ~µ = −gL · µB · J/h̄ −1 Systems, µB =| e | ·h̄ · (2m) ). Der Grund dafür, dass Atome ein ~µ haben, steckt in deren Elektronenkonfiguration. Der zweite Term stellt den Diamagnetismus der Materie dar. In einem Feld von 1T liegt der erste Term in der Grössenordnung µB · 1T ≈ 10−4 eV . Der zweite ist etwa 10−10 eV : Diamagnetismus ist nur dann beobachtbar, wenn atomare Momente verschwinden. Typische Atome mit einem permanenten magnetischen Moment sind 3d Atome wie Fe, Co, Ni, Cu++ und viele seltene Erden. Paramagnetische Substanzen sind Salze solcher Atome, wie zum Beispiel Cu++ SO4 K2 SO4 6H2 O. Nehmen wir an, dass wir einen Kasten voller Atome oder Moleküle mit permanenten magnetischen Momenten haben – ein Gas oder eine Flüssigkeit oder einen Festkörper. Wir möchten wissen, was ~ = (0, 0, B) anlegen. Ohne Magnetfeld geschieht wenn wir ein äusseres Feld B werden die Atome durch die thermischen Bewegungen umgestossen, und die Momente zeigen regellos in alle Richtungen. Wenn aber das Magnetfeld vorhanden ist, bewirkt es eine (partielle) Ausrichtung der Momente: < ~µ >6= 0. ~ = ρ· < ~µ >, wobei ρ die Atomdichte ist Es ensteht eine Magnetisierung M ([M] = A/m) (Curie Paramagnetismus): 2 ~ = (0, 0, ρ · µ · B ) M 3kB T Das Verhältniss von M zu B, das die Response eines Materials zu einem angelegten Magnetfeld charakterisiert, nennt man die magnetische Suszeptibilität χ (es ist oft aussagekräftiger, wenn χ als dimensionslose Grösse µ0 · M/B de2 0 ·ρ·µ finiert ist ). Im Fall des Curie Paramagnetismus ist χp = µ3k . Typische BT −3 −6 Werte von χp bei Zimmertemperatur: 10 (χD ist etwa 10 , also viel kleiner: Diamagnetismus ist nur dann feststellbar, wenn paramagnetische Effekte genau verschwinden). Es gibt in der Natur besondere Materialien, die den Ferromagnetismus zeigen, wie z.B. metallisches Fe, Co, Ni und Gd (und viele Legierungen davon). In diesen Materialien sorgt das Pauli Prinzip der Quantenmechanik dafür, dass ein sehr kleines Feld B genügt, um alle magnetischen Momente auszurichten, und zwar auch bei Raumtemperatur: die Curie Formel gilt nicht mehr. Im Gegensatz zu paramagnetischen Substanzen, ist die 14 KAPITEL 1. MAGNETOSTATIK von der Temperatur verursachte Unordnung der atomaren magnetischen Momente nicht wirksam. Mit anderen Worten, besitzen diese Materialien eine sehr hohe Suszeptibilität. Obwohl die Mehrzahl der Materialien in der Natur Abbildung 1.9: M(B) für eine ferromgn. Probe nicht ferromagnetisch sind, spielen genau die ferromagnetischen Stoffe eine besondere technologische Rolle, die wir im Kapitel 4 untersuchen werden. Die Bedeutung der Magnetisierung werden wir deswegen am Beispiel solcher Materialien erläutern, wobei wir annehmen, dass alle magnetischen Momente ausgerichtet sind, d.h. M = ρ · µ. Magnetfeld in einer unendlich langen Spule mit ferromagnetischen Kern ~ Wie bereits besprochen, genügt ein kleiner Stromstoss durch die Spule, um M entlang der Spulenachse zu richten. Um das Ampersche Gesetz anzuwenden, ~ verursacht werden: wir suchen wir nach den effektiven Strömen, die durch M ~ in zylinderkoordinaten. berechnen rotM ~ = ~eϕ (− rotM ∂Mz ) ∂ρ ~ ist somit ein zirkulierendes Vektorfeld, welches nur an den Orten rotM von 0 verschieden ist, wo seine Ableitung gross ist. Mz fällt von M zu 0 innerhalb einer Randschicht der Dicke δ: somit ist ~jm = Mδ ~eϕ . Der von der Magnetisierung verursachte effektive Strom muss bei der Berechnung des ~ berücksichtigt werden, und zwar muss das Amperesche Gesetz wie Feldes B folgt ergänzt werden: Z ~ i · d~l =| B ~ i | ·l = µ0 (n · l · I + M · l · δ) B δ C Daraus folgt: Bi = BSpule + µ0 · M. Mit anderen Worten: die Anwesenheit der Magnetisierung führt im Innern des Materials zu einem Extra-Magnetfeld 15 KAPITEL 1. MAGNETOSTATIK MZ d M r Abbildung 1.10: Zur Berechnung von ~jM Bm . Das gesamte Feld innerhalb einer Spule mit Eisenkern setzt sich deshalb aus zwei Anteilen zusammen: BSpule ist bei normalen Strömen im Allgemeinen klein. Bm ist hingegen viel stärker: typische Werte für ferromagnetische Materialien ≈ 1 T. Fazit: der Eisenkern dient deshalb der Feldverstärkung. Diese Verstärkung findet in der Technologie zahlreiche Anwendungen. Feldverhalten an Grenzflächen Sollten die Spule und der Zylinder eine endliche Länge besitzen, dann bleibt ~ nicht genau innerhalb der Spule beschränkt, wie folgende allgemeine ÜberB legung zeigt. Man konstruiere eine Gaussschachtel um die Grenzfläche wie in ~ =0 der Figur. Dann gilt, wegen div B 0= Z △V ~ = dV div B Z S(△V ) ~ · dS ~ B Für den Grenzfall △x → 0 bekommen wir für dieses Oberflächenintegral ~a − B ~ i ). Daraus ergibt sich die Stetigkeit der Komponente von B ~ 0 = △F ~n(B senkrecht zur Grenzfläche zwischen zwei unterschiedlichen magnetischen Ma~ in der Nähe des Randes ausserhalb des Kernes ebenso terialien. Somit ist B ~ nimmt mit der Entfernung ab. Um die Tangentialstark wie in Inneren. B ~ komponente von B an einer Grenzfläche zu untersuchen, die in einer dünnen Schicht der Dicke δ von einer Stromdichte ~j durchflossen wird, legen wir um die Grenzfläche eine kleine Stoksche Kontur. ~t sei die Normale zur Fläche, die von C umrandet ist. Aus Z Z Z ~ × Bd ~ S ~= ~= ~ ~l ∇ µ0~jdS Bd S(C) S(C) und △l2 = △l(~t × ~n) = −△l1 folgt, für kleine △x ~2 − B ~ 1 ) = µ0 δ~j · ~t (~t × ~n)(B C 16 KAPITEL 1. MAGNETOSTATIK n Ba DF Dx Bi Abbildung 1.11: Diese Gleichung nimmt eine einfache Gestalt für den Fall eines entlang der ~ an. Dann Achse magnetisierten Zylinders mit homogener Magnetisierung M ~ ist ~j·~tδ = M und für die Komponente des B-Feldes parallel zur Achse entlang des Zylindermantes gilt Bt,i − Bt,a = µ0 · M Das ergibt Bt,a = 0, wegen Bt,i = µ0 · M. Abbildung 1.12: