Beschleunigung einer Masse durch eine konstante Kraft m F
Werbung

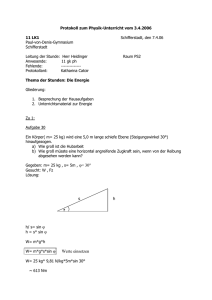
Beschleunigung einer Masse m durch eine konstante Kraft F (Luftkissenbahn und Zuggewicht; Messdaten vom 07. November 2005) m m = m1 ; F= F1 (wiederholte Messung) F 2 a = 0,64 m/s m = 2m1 ; F= F1 m = m1 ; F= F1 /2 2 a = 0,59 m/s a = 0,26 m/s 2 a = 0,25 m/s2 m = 2m1 ; F= F1 /2 2 a = 0,12 m/s Zeit [s] Bemerkungen: der schwach nicht-lineare Anstieg der Geschwindigkeit mit der Zeit liegt am Zuwachs der ziehenden Kraft infolge eines steigenden Gewichtsbeitrags des Fadens; die schlechte Reproduzierbarkeit der Messungen (vgl. die beiden steilsten Kurven) ist hauptsächlich auf Reibungskräfte in den Faden-Umlenkrollen zurückzuführen. Die Newton’schen Axiome , ´ (το´ αξιωµα = Forderung; Meinung, Ansicht) Isaac Newton (1642 - 1727) Philosophiae naturalis Principia mathematica (mathematische Prinzipien der Naturphilosophie) 1. Trägheitsprinzip Ein Körper bleibt in Ruhe oder bewegt sich mit konstanter Geschwindigkeit weiter, wenn keine Kraft auf ihn einwirkt. r r r Fges = ∑ Fi = 0 ⇔ v = const 2. Aktionsprinzip Die auf einen Körper wirkende Gesamtkraft ist gleich dem Produkt der Masse und der Beschleunigung des Körpers. r r Fges = m ⋅ a 3. Reaktionsprinzip Wenn zwei Körper miteinander wechselwirken, dann haben die Kräfte, welche die Körper aufeinander ausüben, denselben Betrag und entgegengesetzte Richtungen. r r FAB = − FBA Die Gravitationskraft Drehwaage nach Cavendish Massen ziehen sich an gemäß r m ⋅m FG = γ 1 2 2 r r: Abstand zwischen den Massen m1 und m2 γ: Gravitationskonstante γ = 6,67 × 10 −11 N ⋅ m2 kg 2 weitere Informationen und Details zur Messung: http://www.physik.uni-muenchen.de/leifiphysik/web_ph11/umwelt-technik/10_gravkonst/gravikon.htm Inertialsysteme und Galilei-Transformation Ein Inertialsystem ist ein Bezugssystem, in dem das Trägheitsgesetz gilt (d.h. in einem Inertialsystem bewegen sich alle Körper gleichförmig und geradlinig, wenn keine äußeren Kräfte wirken). Ereignis Galilei-Transformation (Wechsel des Bezugssystems): x = x′ + v ⋅ t , y = y′ , z = z′ , t = t ′ x′ = x − v ⋅ t , y ′ = y , z ′ = z , t ′ = t Geschwindigkeiten: v x = v ′x + v , v y = v ′y , v z = v ′z Beschleunigungen: ax = a′x , a y = a′y , az = a′z Konsequenz: eine in S´ eingeschaltete Lampe verbreitet ihr Licht entlang der x´-Achse mit der Geschwindigkeit c´; in S muss dann aber entlang der x-Achse die Geschwindigkeit c = c´ + v gemessen werden ! Konstanz der (Vakuum-)Lichtgeschwindigkeit → Lorentz-Transformation Interferometer von Michelson und Morley (1887) zur Messung der Richtungsabhängigkeit der Lichtgeschwindigkeit Einsteins Postulate (1905): 1. Im Vakuum breitet sich Licht in allen Richtungen und in allen Inertialsystemen mit derselben Geschwindigkeit c aus. 2. Die Gesetze der Physik gelten für alle Beobachter in allen Inertialsystemen gleichermaßen (kein Inertialsystem ist gegenüber einem anderen Inertialsystem bevorzugt). Lorentz-Transformation (Wechsel des Bezugssystems): v x = γ ( x′ + v ⋅ t ′), y = y′ , z = z′ , t = γ t ′ + 2 x′ c v ′ ′ ′ ′ x = γ ( x − v ⋅ t ), y = y , z = z , t = γ t − 2 c 1 γ= 1 − v2 / c2 x Scheinkräfte in beschleunigten Bezugssystemen Trägheitskraft: mitbeschleunigter Beobachter bleibt im gestrichenen System in Ruhe z´ die Zugkraft FB = ma wird für ihn durch eine gleich große, entgegengerichtete Trägheitskraft kompensiert: x´ m z x FB Zentrifugalkraft: z´ m FR r x´ z FT = -FB = -ma mitrotierender Beobachter bleibt im gestrichenen System in Ruhe FZ die Radialkraft FR = mω r wird für ihn durch eine gleich große, entgegengerichtete Zentrifugalkraft kompensiert: 2 FZ = -FR = -mω r = -mv /r 2 x 2 Corioliskraft: z´ vr ω z x´ x eine im rotierenden System mit der Geschwindigkeit vr radial nach außen bewegte Masse erfährt eine Corioliskraft, die eine Krümmung der Bahn hervorruft (das gestrichene System dreht sich unter der bewegten Masse weg) z´ x´ z x FC = -2mvrω Zur Coriolis-Kraft Radialgeschwindigkeit: vr = ∆s r r ⇒ r = vr ⋅ t t Umlaufgeschwindigkeit: vω = r ⋅ ω ⇒ ∆ s = −vω ⋅ t = − r ⋅ ω ⋅ t ⇒ ∆s = −vr ⋅ω⋅ t 2 Die gedachte Bewegung entlang des Kreisbogens ∆s inderZeit t für den Weg vom Zentrum bis z um gestricheltenKreiswirdscheinbar durch einetangentiale K raft hervorgerufen, dieformal mit einer tangentialgerichteten B eschleunigung zusammenhängt: 1 ∆s = ⋅ aC ⋅ t 2 A − vr ⋅ω ⋅ t 2 2 Coriolis-Beschleunig ung: aC A − 2 ⋅ vr ⋅ω Coriolis-Kraft: FC = m ⋅ ac =− 2 ⋅ m ⋅ vr ⋅ω Haft- und Gleitreibungskräfte θ Normalkraft -F g cosθ θ Reibungskraft -F g sin θ Abtrieb F g sinθ Der Übergangvonder Haftreibung zur Gleitreibung erfolgt am Grenzwinkel θ 0 θ θ Gewicht Fg Haftreibungskoeffizient: f0 = Abtriebskraft sin θ 0 = = tan θ0 Normalkraft cos θ0 Der Haftreibungskoeffizient ist größer als der Gleitreibungskoeffizent einigeReibungskoeffizienten Haften Gleiten Stahl auf Stahl 0,74 0,57 Al auf Stahl 0,61 0,47 Messingauf Stahl 0,51 0,44 Teflon auf Stahl GummiaufBeton 0,04 1,00 0,04 0,80 Mechanische Arbeit z ortsabhängige Kräfte y auf dem Teilstück verrichtete Arbeit: r r r dW = F ⋅ d s r F r gekrümmter = F ⋅ d s ⋅ cos θ θ Weg r ds x r r entlang des Gesamtweges verrichtete Arbeit: W = ∫ F ⋅ d s 2 1 kg ⋅ m 2 Einheit der Arbeit: [W ] = [F ]⋅ [s] = 1 Nm = 1 = 1 J (Joule) s2 r r Beispiele für eindimensionale Bewegungen (mit F s ) a) Hubarbeit ( F = m ⋅ g = const ) 2 WH = m ⋅ g ⋅ ∫ dx = m ⋅ g ⋅ (x2 − x1 ) = m ⋅ g ⋅ ∆h 1 b) Feder-Spannarbeit ( F ( x) = D ⋅ x) 2 WF = D ∫ x ⋅ dx = D ⋅ 1 1 2 x2 − x12 ) → ( 2 1 D x22 (für x1 = 0) 2 2 d x dv c) Beschleunigungsarbeit F ( x ) = m ⋅ 2 = m ⋅ dt dt 2 2 2 dv dx 1 WB = m∫ ⋅ dx = m∫ ⋅ dv = m∫ v ⋅ dv = m (v22 − v12 ) dt dt 2 1 1 1 1 → WB = m v22 (für v1 = 0) 2 Potentielle Energie (Gravitationspotential) r r W H = ∫ F ⋅ d s = mg ⋅ ∫ h ⋅ dh = 0 Relativität der Zeit Gleichzeitigkeit von Ereignissen: fahrender Beobachter sieht Einschlag 1 später als Einschlag 2, ruhender Beobachter sieht weil der Bus sich während der beide Einschläge gleichzeitig Signallaufzeit nach vorn bewegt Einschlag 1 Einschlag 2 Laufzeit eines Lichtimpulses im fahrenden Zug: Ereignis 1 Ereignis 2 Ereignis 1 Ereignis2 ∆t Messung im Messung auf dem Bahnsteig fahrenden Zug 2D ∆t ′ = c 2L 2 v ⋅ ∆t ∆t = = D2 + > ∆t ′ c c 2 2 Raketenantrieb (I) Raketenmasse vor dem Start: m0 = M 0 + M T (M0: Nutzlast, MT: Masse des Treibstoffs) Raketenmasse nach dem Start: m(t ) = m0 − k ⋅ t (k = dm/dt = const.: ausgestoßene Masse pro Zeit) vR Brennstoff-Ausstoßgeschwindigkeit: (relativ zur Düse: vBD = const) (relativ zum festen Startort: vB = vBD - vR) vB vBD=const Impuls-Änderung in einem kurzen Zeitintervall [t , t+∆t]: Rakete: ∆p R = −∆m ⋅ vR + m(t ) ⋅ ∆vR Geschwindigkeitszunahme Massenabnahme Massenzunahme ausgestoßener Brennstoff: ∆ pB = −vB ⋅ ∆m = − vBD − vR ⋅ ∆m der Raketenbewegung entgegen gerichtet Erhaltung des Gesamt-Impulses (pStart = 0): ∆p R + ∆p B = −∆ m ⋅ vR + m(t ) ⋅ ∆vR + −(vBD − vR ) ⋅ ∆m = 0 ⇒ m(t) ⋅ ∆vR − vBD ⋅ ∆m = 0 ⇒ m(t ) ⋅ ⇒ ∆vR ∆m = vBD ⋅ ∆t ∆t dv k k = vBD ⋅ = vBD ⋅ dt m(t ) m0 − k ⋅ t konstanter Brennstoffverbrauch pro Zeit k Integrationskonstante aus Anfangsbedingung v(t=0) = 0: k ⇒ v (t ) = vBD ⋅ ∫ dt = −vBD ⋅ ln (m0 − k ⋅ t ) + C m0 − k ⋅ t ⇒ v(t ) = vBD ⋅ ln m0 − ln (m0 − k ⋅ t ) = vBD ⋅ ln 0 = −vBD ⋅ ln m0 + C ⇒ C = +vBD ⋅ ln m0 m0 m0 − k ⋅ t Raketenantrieb (II) Grundgleichung des idealen Raketenantriebs (ohne Gravitation): vR (t ) = vBD ⋅ ln m0 − ln (m0 − k ⋅ t ) = vBD ⋅ ln m0 m0 − k ⋅ t Raketenmasse vor dem Start: m 0 = M 0 + M T (M0: Nutzlast, MT: Masse des Treibstoffs) Raketenmasse nach dem Start: m( t) = m0 − k ⋅ t (k = dm/dt = const.: ausgestoßene Masse pro Zeit) Brennstoff-Ausstoßgeschwindigkeit (relativ zur Düse): v BD = const erreichbare Endgeschwindigkeit ( Brennstoff verbraucht): m0 − k ⋅ t E = M 0 ⇒ v(t E ) = vBD ⋅ ln M M0 + MT = vBD ⋅ ln 1 + T M0 M0 senkrechter Aufstieg im konstanten Gravitationsfeld (g = const) : Die Beschleunigung dvR/dt infolge des Raketenantriebs verringert sich um g. Die Raketengeschwindigkeit v R( t) verringert sich um die Fallgeschwindigkeit gt. Geschwindigkeit in der Antriebsphase: vRG (t ) = vBD ⋅ ln m0 − g ⋅t m0 − k ⋅ t Geschwindigkeit am Ende der Antriebsphase (t E = M T / k ) : M vRG (tE ) = vBD ⋅ ln 1 + T M0 g ⋅ MT − k Stoß-Gesetze (ohne äußere Einwirkungen) I: zentrale elastische Stöße zentral: Stoßrichtung auf der Verbindungslinie der Körpermittelpunkte elastisch: Erhaltung der Bewegungsenergie (keine bleibende Deformation) m M m M v0 V0 vor dem Stoß v1 V1 nach dem Stoß Impulserhaltung: m ⋅ v0 + M ⋅ V0 = m ⋅ v1 + M ⋅ V1 ⇒ m v0 − v1 = M V1 − V0 m ⋅ v02 M ⋅ V02 m ⋅ v12 M ⋅ V12 Energieerhaltung: ⇒ m v02 − v12 = M V12 − V02 + = + 2 2 2 2 ⇒ m v0 − v1 ⋅ v0 + v1 = M V1 − V0 ⋅ V1 + V0 ⇒ v0 + v1 = V0 + V1 M V1 − V0 (+) M (v0 − v1 ) = (V1 − V0 ) m M 2 ⋅ v0 = 1 − m V1 = 2 ⋅m M −m ⋅ v0 + ⋅ V0 M +m M +m und analog v1 = V1 v1 v0 0 M=m/2 (4/3) v0 (1/3) v0 M=2m (2/3) v0 -(1/3) v0 M→∞ 0 -v0 M=m ⋅ V1 2⋅M M −m ⋅ V0 − ⋅ v0 M +m M +m Spezialfälle: V0 = 0 Massenverhältnis M ⋅ V + 0 1 + m Stoß-Gesetze (ohne äußere Einwirkungen) II: zentrale inelastische Stöße zentral: Stoßrichtung auf der Verbindungslinie der Körpermittelpunkte inelastisch: keine Erhaltung der Bewegungsenergie (bleibende Deformation) m M v0 V0 vor dem Stoß M m VG nach dem Stoß keine Erhaltung der Bewegungsenergie, aber: Impulserhaltung: m ⋅ v0 + M ⋅ V0 = (M + m ) ⋅ VG ⇒ VG = m ⋅ v0 + M ⋅ V0 M +m III: schiefe elastische Stöße Impulserhaltung: m gilt sowohl für die horizontale (x) wie für die vertikale (y) Komponente (→ 2 Gleichungen) v1 m Energieerhaltung: b v0 vor dem Stoß m ⋅ v02 m ⋅ v12 M ⋅ V12 = + 2 2 2 (→ 1 Gleichung) M V0 = 0 M V1 Zusatzinformation: z.B. “Stoßparameter” b Ballistisches Pendel zur Messung von Geschoß-Geschwindigkeiten Impuls vor dem Stoß: pv = mk vk Impuls nach dem Stoß pn = (mp + mk ) vp ≅ mp vp L Impulserhaltung (pv = pn) vk ≅ (mp / mk ) vp Pendelmasse (mp , vp0 = 0) Geschoß (mk , vk) h x Bestimmung von vp aus dem Energie-Erhaltungssatz: 1 mp ⋅ v 2p = mp ⋅ g ⋅ h ⇒ vp = 2 ⋅g ⋅h 2 x2 mit h ≅ (wegen x 2 = L2 − (L − h )2 = 2Lh − h 2 ≅ 2Lh ) 2⋅L ⇒ vk ≅ mp mk ⋅ g ⋅x L Relativität der Länge Laufzeit eines Lichtimpulses im fahrenden Zug: Hinweg (∆t´ /2) Rückweg ( ∆t´/2) D´ Messung im fahrenden Zug: Laufzeit für Hin- und Rückweg ∆t ′ / 2 2 ⋅ D′ ⇒ ∆t′ = c Messung auf dem Bahnsteig Hinweg ( ∆th) D Dh Dh = c ⋅∆ t h = D + v ⋅ ∆th ⇒ ∆th = D c −v Dr = c ⋅∆t r = D − v ⋅ ∆tr ⇒ ∆t r = D v ∆th D Dr Rückweg ( ∆tr) c+v v ∆t h v ∆tr gesamte Laufzeit: ∆t = ∆th + ∆ tr = D ⋅ (c + v) + D ⋅ (c − v ) ( c − v) ⋅ ( c + v) = 2 ⋅ D ⋅c c −v 2 2 = 2⋅ D c ⋅ 1 1− v / c 2 2 = 2⋅ D c ⋅ γ2 Berücksichtigung der Zeitdilatation: ∆t = 2⋅D 2 2 ⋅ D′ ⋅ γ = γ ⋅ ∆t ′ = ⋅γ c c D= 1 2 2 ⋅ D ′ = 1 − v / c ⋅ D′ < D′ γ Harmonische Schwingung (I) (horizontales lineares Federpendel) Ruhelage 2. Newton´sches Axiom: m d2x F = m ⋅ 2 = m ⋅ && x dt FF = − D ⋅ x Bewegungsgleichung: && x+ x D ⋅x=0 m Lösungsansatz für die Bewegungsgleichung: dx = x& = ω ⋅ xmax ⋅ cos (ωt + ϕ0 ) dt d2x ⇒ = && x = − ω2 ⋅ xmax ⋅ sin (ω t + ϕ0 ) 2 dt x(t ) = xmax ⋅ sin (ωt + ϕ0 ) ⇒ einsetzen des Lösungsansatzes in die Bewegungsgleichung: − ω2 ⋅ xmax ⋅ sin (ω t + ϕ0 ) + D ⋅ xmax ⋅ sin (ω t + ϕ0 ) = 0 m ⇔ ω2 = der Lösungsansatz erfüllt die Bewegungsgleichung, wenn ω = D m D/m die Konstante xmax ist die Maximalauslenkung aus der Ruhelage die Konstante ϕ0 folgt aus der Anfangsbedingung: x(t = 0) = xmax ⋅ sin ϕ0 Harmonische Schwingung (II) (senkrechtes lineares Federpendel) statisch belastet unbelastet Gewichtskraft: schwingend FG = − m ⋅ g D Federkraft: FF = D ⋅ ( xs − x ) xs - x xs Trägheitskraft: x Ruhelage (x = 0) FT = −m ⋅ x m D ⋅ xs − m ⋅ g = 0 FT + FG + FF = − m ⋅ x − m ⋅ g + D ⋅ x s − D ⋅ x = 0 Bewegungsgleichung: m x D x 0 potentielle Energie im unteren Totpunkt: Epot = EF + EG = D 2 D D 2 + (D ⋅ xs − m ⋅ g )⋅ xmax (xs + xmax ) − m ⋅ g ⋅ xmax = xs2 + xmax 2 2 2 potentielle Energie im oberen Totpunkt: E pot = EF + EG = D D D 2 2 + (− D ⋅ xs + m ⋅ g )⋅ xmax (xs − xmax ) + m ⋅ g ⋅ xmax = xs2 + xmax 2 2 2 x (t ) = xmax ⋅ sin ω t + ϕ0 D ω ωt Ruhelage mit ω= D / m x max m ϕ x(t ) ϕ0 ϕ0 -xmax π 2π ωt Zugkraft am Aufhängepunkt eines Federpendels (Messdaten vom 21. November 2005) Kraft am Aufhängepunkt F(t) T= 2π ω Ruhelage Zeit t Bemerkung: die Zugkraft am Aufhängepunkt der Feder setzt sich zusammen aus der Gewichtskraft (Verschiebung der Nulllinie nach unten) und der Trägheitskraft der schwingenden Masse; wegen der Proportionalität von x und x bei sinusförmiger Zeitabhängigkeit liefert die Messkurve auch ein Bild für den zeitlichen Verlauf des Ortes x(t). Harmonische Schwingung (III) (mathematisches Fadenpendel) Drehpunkt Bewegung der Masse entlang Kreisbogen Ortsvariable: Bogenlänge s (t ) L (t ) rücktreibende Kraft nach einer Auslenkung: Komponente der Gewichtskraft in Richtung der Ortsvariablen: F = − Fg ⋅ sin θ = −m ⋅ g ⋅ sin θ ≅ −m ⋅ g ⋅ θ für kleine Auslenkwinkel Bewegungsgleichung: m s m g θ= s g ⇒ && s + ⋅s = 0 L L g && s = L ⋅ && θ ⇒ && θ + ⋅θ = 0 L gleiche Form wie beim Federpendel s (t ) = smax ⋅ sin ω t + ϕ0 θ(t ) = θmax ⋅ sin ωt + ϕ0 mit ω = g / L und T = 2π = 2π ⋅ L / g ω