Das Kepler-Problem
Werbung

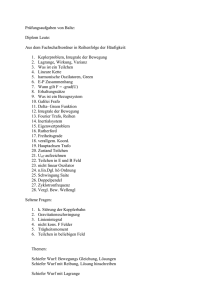
Das Kepler-Problem Max Camenzind - Akademie HD - Mai 2016 Das Zweikörper-Problem • In der Physik bezeichnet man als Zweikörper-Problem die Aufgabe, die Bewegung zweier Körper, die ohne äußere Einflüsse nur miteinander wechselwirken, zu berechnen. Speziell wird als Zweikörper-Problem auch die Aufgabe der klassischen Mechanik bezeichnet, die Bewegung zweier Körper zu berechnen, die sich gegenseitig mit einer Kraft anziehen oder abstoßen, die proportional zum Quadrat des inversen gegenseitigen Abstandes abnimmt. • Im astronomischen Kontext wird das Problem auch als Kepler-Problem bezeichnet. Ursprünglich wurde angenommen, das Zweikörper-Problem würde zur Beschreibung eines heliozentrischen Kosmos ausreichen. Dem ist leider nicht so! Das Zweikörper-Problem Inhalt • Die Situation zu Newtons Zeiten. • Das Gravitationsgesetz von Newton. • Newtonsche Mechanik und LagrangeFormalismus. • Die Reduktion des 2-Körper-Problems: • Bewegung des Schwerpunktes; • Reduzierte Masse; • Lösung des reduzierten Problems; • Diskussion der Kepler-Gesetze; Die Situation zu Newtons Zeit Kopernikus setzt die Sonne ins Zentrum des Sonnensystems Johannes Kepler untersucht Tycho Brahes Planetendaten Findet in 40 Jahren 3 Gesetze wäre heute ein Problem! Kepler-Gesetze nach J. Kepler 3. Kepler-Gesetz Const Für alle Planeten (T²/a³)Erde = 2,97 x -19 10 s²/m³ Ad 1. Kepler-Gesetz: Schnur-Konstruktion der Ellipse Schnur-Länge = 2a Was sind Ellipsen ? Immer durch 2 Parameter bestimmt ! z.B. a & b 2 Parameter einer Ellipse Ad 2. Kepler-Gesetz „Flächensatz“ Ad 3. Kepler-Gesetz Je weiter weg der Planet, desto langsamer Umlaufszeiten nehmen zu Kritische Frage: Sind Planetenbahnen wirklich Ellipsen? Nein! Das Newtonsche Gravitationsgesetz Die Anziehung der Massen ist universell Das Gravitationsgesetz vektoriell Gravitationskraft ist proportional - zur schweren Masse der beiden Körper ~ m1, ~ m2 - zum Quadrat des reziproken Abstandes ~1 d2 K 21 m2 mit d r2 r1 - wirkt in Richtung der Verbindungsgraden e12 r2 r1 r2 r1 z m1 r1 Gravitationskraft K12 Gm1m2 r2 r2 r1 r2 r1 3 y mit der Gravitationskonstanten G 6672 4 10 Max Camenzind 11.06.2016 -14 m3 s 2 kg x Die Gravitationskonstante Newton M1M2 FG = G G = Gravitationskonstante r2 G = 6,6719x10-11 m³/(kg s²) M1 und M2 = Massen der Körper r = Abstand zwischen den Körpern Gravitationsgesetz gilt hier auf der Erde und überall im Kosmos – auch im Sonnensystem gegen Aristoteles! Das Cavendish Experiment (1798) G Das Gravitationsfeld Gravitationsfeld überträgt die Kräfte zwischen den Körpern eine Eigenschaft des Raumes wie Magnetfeld oder el. Feld. g = GM / r2 Feldstärke = Beschleunigung: Diese Feldstärke hängt nicht von der Masse M2 des Probekörpers ab. Die Kraft beträgt: GM1M2/r2 = M2g = FG = Fw Gravitation ist für Gewicht verantwortlich. Die Gravitative Feldstärke Die Masse der Erde beträgt 6,0x1024 kg und ihr Radius 6378 km. Wie groß ist die gravitative Feldstärke an der Oberfläche der Erde? g = GM/R2 g = (6,67x10-11 Nm2/kg2)(6,0x1024 kg) / (6,378x106 m)2 g = 9,81 m/s2 Ein Planet habe den Radius 3500 km und eine Oberflächengravitation von 3,8 m/s2. Wie groß ist die Masse des Planeten? (3,8 m/s2) = (6,67x10-11 Nm2/kg2)(M) / (3,5x106 m)2 (3,8 m/s2) = (6,67x10-11 Nm2/kg2)(M) / (1,2x1013 m2) M = (4,6x1013 m3/s2) / (6,67x10-11 Nm2/kg2) M = 6,9x1023 kg Jeder Raumpunkt trägt ein Feld Gravitationsgesetz K12 Gm1m2 r2 r1 r2 r1 m N kg s 2 3 Newtonsche Bewegungsgleichung m2r2 K gleichsetzen r2 Gm1 r2 r1 r2 r1 m s 2 3 Feldstärke g Q rP GmQ rP rQ rP rQ 3 Max Camenzind 11.06.2016 m s 2 Was Newton nicht wusste Newton wusste nicht, was Gravitation erzeugt, obschon er erkannte, dass alle Körper auf Gravitation reagieren. Für Newton war Gravitation einfach eine Eigenschaft von Körpern. Newton konnte auch nicht erklären, wie Körper Gravitation erzeugen, wenn sie sich nicht berühren Der Feldbegriff fehlte damals noch! Er liebte die Idee “action-at-a-distance” nicht. Die Newtonschen Bewegungsgleichgn Das Zwei-Körper-Problem X X X Diese Gleichungen sind in dieser Form auch für 2 Körper nur numerisch lösbar! Lagrange Extremalprinzip Der Lagrange-Formalismus ist in der Physik eine 1788 von Joseph Louis Lagrange eingeführte Formulierung der klassischen Mechanik, in der die Dynamik eines Systems durch eine einzige skalare Funktion, die Lagrange-Funktion, beschrieben wird. Der Formalismus ist (im Gegensatz zu der Newtonschen Mechanik, die a priori nur in Inertialsystemen gilt) auch in beschleunigten Bezugssystemen gültig. Der Lagrange-Formalismus ist invariant gegen Koordinatentransformationen. Aus der Lagrange-Funktion lassen sich die Bewegungsgleichungen mit den EulerLagrange-Gleichungen der Variationsrechnung aus dem Prinzip der kleinsten Wirkung bestimmen. Diese Betrachtungsweise vereinfacht viele physikalische Probleme, da sich, im Gegensatz zu der Newtonschen Formulierung der Bewegungsgesetze, einfach formulieren lassen. Euler-Lagrange-Gleichungen Kinetische minus potenzielle Energie L(t , q, q ) T (q, q ) V (t , q) Extremalprinzip Wirkung I = ∫ L dt: • Bewegungsgleichungen resultieren aus Extremalprinzip für den Lagrange (1788) d L L 0 dt q q Herleitung Euler-Lagrange Für Mathematisch Interessierte Variation des Wirkungsintegrals Partielle Integration Endpunkte werden fest gehalten. Alle Koordinaten sind unabhängig: Dies sind die Euler-Lagrange-Gleichungen für ein System von N Massen, j = 1,…,3N. Newtonsche Mechanik • Wir betrachten ein Teilchen mit Masse m in 2 Dimensionen, in Kartesischen Koordinaten (x,y), mit potenzieller Energie U(x, y), der Lagrange L 12 m( x 2 y 2 ) U ( x, y). • In diesem Fall ergeben sich 2 Lagrange-Gleichungen • Die linke Seite entspricht der Kraft • Die rechte Seite der Beschleunigung • Beide Seiten ergeben das Newtonsche Bewegungsgesetz in Vektorform L d L , x dt x L U Fx , x x d L d mx mx, dt x dt Fx mx, October 21, 2010 Fy my L d L . y dt y L U Fy . y y d L d my my. dt y dt oder F ma. Das 2-Körper-Problem • Der Lagrange des Systems in Kartesischen Koord: L V 2 i 1 j 1 2 2 m1 (r1 ) m2 (r2 ) V 2 2 3 2 m j (rij ) 2 (ri1 ri 2 ) i 1 2 (r1 r2 ) 3 2 • In dieser Schreibweise sieht das Problem nicht sehr angenehm aus: alle 6 Koordinaten sind im Potenzial vermischt. • Wir suchen eine einfachere Formulierung: Schwerpunkt-Koordinaten Sonne r2 Planet r1 Sonnenbewegung um Schwerpunkt + 220 km/s Gal Orientierung Sonnensystem Galaktisches Galaktisches Zentrum Zentrum Ekliptik Ebene Rotation um Zentrum 220 km/s Galaktische Scheibe Kepler-Gesetze nach Newton Kepler-Gesetze beweisbar? Kinetische Energie & Potenzial Massenmittelpunkt & CM Koordinaten • Dazu führen wir relative Koordinaten ein: m1r1 m2 r2 r r1 r2 ; R m1 m2 • R Massenmittelpunkt • • m2 r r1 R m1 m2 r2 m1r r2 R m1 m2 r1 2 2 2 m2 r 2 m1r ; (r2 ) R (r1 ) R m m m m 1 2 1 2 Lagrange in CM-Koordinaten • Einsetzen und ausrechnen: 2 2 2 m1 (r1 ) m2 (r2 ) L V (r1 r2 ) 2 2 2 2 m2 r m1r m1 R m2 R m1 m2 m1 m2 2 V (r ) 2 2 2 2 2 m1 ( R) m1m2 Rr m1 m2 r m2 ( R) m1m2 Rr 2 2 m1 m2 2(m1 m2 ) 2 m1 m2 2 2 2 m1m2 (r ) (m1 m2 )( R) m2 m1r V r V r 2 2(m1 m2 ) 2 2(m1 m2 ) Bewegung des Schwerpunktes • Der Lagrange in den neuen Koordinaten: 2 2 (m1 m2 )( R) m1m2 (r ) L V r 2 2(m1 m2 ) • Potenzial hängt nicht von CM ab! • Die Euler-Lagrange-Gleichungen implizieren Bewegung des Schwerpunktes L d L Ri dt Ri L const (m1 m2 ) Ri Pi Ri • Totaler Impuls des Systems P = MV ist erhalten: Bewegungsintegral CM bewegt sich linear. Das Reduzierte 2-Körper-Problem • Der Lagrange in CM-Koordinaten: 2 2 (m1 m2 )( R) m1m2 (r ) L V r 2 2(m1 m2 ) 2 2 ( P) m1m2 (r ) V r 2(m1 m2 ) 2(m1 m2 ) • Umeichung des Lagrange 2 2 ( P) m1m2 (r ) L' L V r 2(m1 m2 ) 2(m1 m2 ) • konstanter Term ist nicht relevant. Das Reduzierte 2-Körper-Problem • Der neue Lagrange: 2 2 m1m2 (r ) m( r ) L' V r V r 2(m1 m2 ) 2 m1m2 m m1 m2 • Damit haben wir das ursprüngliche 2-KörperProblem auf ein 1-Körper Problem in einem Zentralpotenzial (Potenzial, das nur vom Abstand r zwischen den Körpern abhängt) reduziert. • m = µ = m1m2/(m1+m2): reduzierte Masse • Anzahl Freiheitsgrade nur noch: 3 • Dimension des Phasenraumes: 6 Sphärische Koordinaten 2 2 2 2 m(rx ry rz ) m(r ) 2 2 2 L' V r V rx ry rz 2 2 • Zentralpotenzial ist sphärisch symmetrisch • Günstig in sphärischen Koordinaten zu arbeiten rx r sin cos ; ry r sin sin ; rz r cos m(r 2 r 2 2 r 2 sin 2 2 ) L' V (r ) 2 Sphärische Symmetrie Referenzebene L' m(r 2 r 2 2 r 2 sin 2 2 ) / 2 V (r ) • Die Euler-Lagrange-Gleichung für φ d L' L' 0 dt L' 2 2 p const r m sin p • Die φ Koordinate ist zyklisch: 2 r m sin 2 • Da das System sphärisch symmetrisch ist, haben wir eine Freiheit in der Wahl des Referenzsystems. • Wir wählen dies wie folgt: die Anfangsgeschwindigkeit liege in der Ebene φ = const • 0 0 p 0 0 Drehimpulserhaltung in der -Ebene L' m(r 2 r 2 2 r 2 sin 2 2 ) / 2 V (r ) • Euler-Lagrange Gleichung für θ d L' L' 0 dt • Die θ Koordinate ist ebenso zyklisch. • Der entsprechende Impuls zur θ Koordinate L 2 const p r m • Drehimpuls in der Bewegungsebene relativ zum Ursprung ist erhalten r 2m rmr rmv rp J const Das Effektive Potenzial 2 2 p pr p J const E V (r ) 2 2m 2mr J2 Veff ( r ) V (r) • effektives Potenzial 2 2mr • Die totale Energie hängt effektiv nur von einer Koordinate ab, der Koordinate r. • Damit reduzierten wir das 2-Körper-Problem auf ein 1-Körper-Problem eines Teilchens mit reduzierter Masse m im effektiven Potenzial Veff(r). • Anzahl Freiheitsgrade: 1 • Dimension des Phasenraumes: 2 Da 2 Erhaltungsgrößen existieren, totale Energie E und Drehimpuls J, ist das Problem integrabel ! Die totale Energie E im reduzierten 2-Körper-Problem Das effektive Potenzial Das effektive Potenzial Veff(r) ungebunden E = 0 Parabelbahn rmin gebunden Abb.: Effektives Potenzial Veff(r) bei der Bewegung in einem Zentralfeld Die Radiale Bewegungsgleichung 2 2 p pr H V (r ) E 2 2m 2mr • Energieerhaltung: totale Energie ist erhalten dH H 0 dt t H const E p pr 2m E V (r ) 2 2mr 2 L' pr mr r Die Bahngleichung nicht lösbar als f(t) 2 J2 E r V (r ) 2 m 2mr J 2 mr mr 2 d dt J dt dr 2 2 J E V (r ) 2 m 2mr mr 2 d J dr 2 2 J E V (r ) 2 m 2mr Die Bahn-Anomalie als Func(r) r J dr 0 r0 r 2 2 J 2m E V (r ) 2 2mr • Diese Bahngleichung kann integriert werden für Potenziale der Form (sog. Potenzgesetze) V (r ) ar n Falls n = 2, - 1, - 2, kann das Integral als trigonometrische Funktion ausgedrückt werden. • Falls n = 6, 4, 1, - 3, - 4, - 6, kann das Integral als elliptische Funktion ausgedrückt werden. Das Kepler-Problem • Kepler Potenzial: V (r ) r 1 • beschreibt gravitative und elektrostatische Johannes Kepler Wechselwirkung (1571-1630) • Attraktiv: • Repulsiv: • Integral: k V ( r ) ; k Gm1m 2 0 r k V (r ) ; k 0 r Jdr 0 2 J k 2 r 2m E 2 2mr r Das Kepler-Problem - Integration k V ( r ) • Betrachten wir ein attraktives Potenzial: r Jdr k 0 0 2 1 k J 2 r 2m E u 2 r 2mr r du 2mE 0 2 2 2 2m( E ku ) / J u J • Integraltafel du u u 2 arccos 2u 2 4 2mk 2 J Das KeplerProblem 0 arccos 2mk 2u 2 J 2 2mE 2mk 2 4 2 J J 2 uJ 1 0 arccos km 2 2 EJ 1 2 mk Das Kepler-Problem – arccos invertieren 2 2 2 EJ uJ 1 1 cos( 0 ) 2 mk km 1 u r 1 km 2 EJ 2 1 1 cos( ) 0 2 2 r J mk Das Kepler-Problem – radiale Lösung 1 km 2 EJ 2 2 1 1 cos( ) 0 2 r J mk 1 C 1 e cos( 0 ) r km C 1/ p 2 J 2 EJ 2 1 e 2 mk • Damit haben wir die radiale Bahnform erhalten, parametrisiert durch totale Energie E und Drehimpuls. • Abhängig von den Konstanten C und e nimmt die Form der Bahn verschiedene Gestalt an. e < 1, falls E < 0, d.h. für gebundene Bahnen! e = 0 Kreisbahn. • Für ein positives C (Attraktion) repräsentieren die Bahnen Kegelschnitte: Ellipsen, Parabel und Hyperbel. Polarform: r() = p/(1 + e cos()) p Gebundene Bahnen sind Ellipsen 2 rx rx 0 ry 1 • Falls 0 e 1 a b 2 2 • 1 e ist reell und b ist positiv. 2 • Der Orbit ist eine Ellipse mit Fokus verschoben vom Ursprung um rx 0 und zwei Hauptachsen a und b • Parameter p = 1/C semilatus rectum p ea p a 2 1 e p 1 e2 b y Ellipsengleichung Kartesisch x a=3 b=2 e=? p=? Fokalpunkte = ? Polargleichung r = ? Gebundene Bahnen E < 0 Ellipsen 2 rx rx 0 ry 1 a b 2 mk 2 Veff (rmin ) 2 2 p 2 2 Ep 0 e 1 0 1 1 2 mk Veff (rmin ) E 0 • Ellipse: Pendelbahn zwischen 2 Radien Perihel Aphel 2 mk E0 2 2 p Aphel Die Exzentrizität der Kepler-Bahn 2 2 rx rx 0 ry 1 a b 2 2 p p a b p b e a 2 2 a 1 e 1 e • Der Parameter e ist die Exzentrizität der Ellipse ep rx 0 2 1 e p a rx 0 1 e • Für konstante Energie nimmt Perihel ab mit zunehmender Exzentrizität Anhang: Geometrie der Kepler-Bahnen rx 1 • Falls e 0 C 1 e cos( 0 ) cos( 0 ) r r rx 1 r 1 e r erx C r 1 r erx p erx C rx ry r p 2erx p e rx 2 2 2 2 2 2 (1 e )rx 2erx p ry p 2 2 2 2 Anhang: Geometrie der Kepler-Bahnen 2 • Falls e 1 2 1 e2 ep 1 e 2 2 rx ry 1 2 1 e p p p p ep a b r 2 x 0 2 2 1 e 1 e 1 e 2 2 2 rx rx 0 ry 1 a b 2 Ellipsengleichung Geometrie der Kepler-Bahnen e = 0 • Effektives Potenzial: 2 J k Veff (r ) 2 2mr r • Im Falle e0 1 C 1 e cos( 0 ) r 1 C r • Kreisbahn 2 k 2m Veff (rmin ) 2 2 p 2 EJ e 1 0 2 m(GmM ) 1 r C k 2m E 2 2J Veff (r0 ) • Geometrie der Kepler-Bahn e > 1 22 22 rxx rxx 00 ryy h 1 b e 1 a b' 1 e2 • Dann 1 e 2 ist imaginär und • Die Bahn ist eine Hyperbel. b 2 ist negativ b ib'