Skript
Werbung

Analysis 3
Anton Deitmar
Wintersemester 2014/15
Inhaltsverzeichnis
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
5
11
14
Integration
2.1
Integrale positiver Funktionen . .
2.2
Integrale komplexer Funktionen .
2.3
Parameter und Riemann-Integrale
2.4
Komplexwertige Maße . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
31
31
37
41
45
Lp -Räume
3.1
Einige Ungleichungen . . . . . . . . . .
3.2
Vollständigkeit . . . . . . . . . . . . . .
3.3
Hilbert-Räume . . . . . . . . . . . . . .
3.4
Der Satz von Lebsgue-Radon-Nikodym
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
49
49
51
55
65
4
Produktintegral
4.1
Vorbemerkungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2
Produktmaße . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3
Der Satz von Fubini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
70
72
77
5
Allgemeine Topologie
5.1
Abstrakte Topologie . . . . . . . . . . . . . .
5.2
Stetigkeit . . . . . . . . . . . . . . . . . . . . .
5.3
Kompaktheit und das Lemma von Urysohn
5.4
Erzeuger und Abzählbarkeit . . . . . . . . .
5.5
Initial- und Final-Topologien . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
81
81
84
86
91
94
Differentialformen
6.1
Mannigfaltigkeiten . . . . . . . . . . .
6.2
Derivationen . . . . . . . . . . . . . .
6.3
Multilineare Algebra . . . . . . . . . .
6.4
Zurückziehen von Differentialformen
2
3
6
7
Maßtheorie
1.1
σ-Algebren . . . . . . .
1.2
Messbare Abbildungen
1.3
Maße . . . . . . . . . . .
1.4
Das Lebesgue-Maß . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
99
. 99
. 103
. 109
. 117
Der Satz von Stokes
7.1
Orientierung . . . . . . . . . . . . . . . . .
7.2
Teilung der Eins . . . . . . . . . . . . . . .
7.3
Orientierung von Hyperflächen . . . . . .
7.4
Der Stokessche Satz für den Rn . . . . . . .
7.5
Holomorphe Funktionen . . . . . . . . . .
7.6
Poincaré Lemma . . . . . . . . . . . . . . .
7.7
Die Stokes-Formel für Mannigfaltigkeiten
7.8
Der Brouwersche Fixpunktsatz . . . . . . .
7.9
De Rham Kohomologie . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
120
120
124
130
133
136
141
143
145
148
Analysis 3
1
2
Maßtheorie
1.1
σ-Algebren
Eine σ-Algebra ist ein System von Teilmengen einer gegebenen Menge
X, das abgeschlossen ist unter abzählbaren Vereinigungen und
Komplementbildung. Dies sind die grundlegenden Mengensysteme,
auf denen Maße definiert werden können.
Definition 1.1.1. Eine σ-Algebra A auf einer Menge X ist eine
Teilmenge A ⊂ P(X) der Potenzmenge so dass
• ∅∈A,
• A ∈ A ⇒ Ac ∈ A ,
• A1 , A2 , · · · ∈ A
⇒
∞
[
A j ∈ A .
j=1
Hierbei wird wie üblich das Komplement einer Menge A als Ac = X r A
geschrieben. Ein Paar (X, A ) bestehend aus einer Menge X und einer
σ-Algebra A auf X heißt Messraum. Die Mengen in A nennt man
messbare Mengen.
Man beachte, dass nur abzählbare Vereinigungen wieder in der
σ-Algebra liegen, nicht beliebige Vereinigungen, wie bei einer
Topologie.
Lemma 1.1.2. Ist A eine σ-Algebra auf X und sind A1 , A2 , . . . Elemente von
T
A , dann ist auch der Schnitt ∞
j=1 A j in A .
Sind A, B ∈ A , so ist auch die mengentheoretische Differenz A r B in A .
Analysis 3
3
Beweis. Jedes Acj liegt in A und damit auch
\
j
Beispiele 1.1.3.
c
[
A j = Acj
und
A r B = A ∩ Bc .
j
• Für jede Menge X sind {∅, X} und P(X) selbst
schon σ-Algebren.
• Sei X eine überabzählbare Menge und sei A das System aller
Teilmengen A ⊂ X so dass entweder A oder Ac abzählbar ist. Dann
ist A eine σ-Algebra, genannt die abzählbar-coabzählbar
σ-Algebra.
Definition 1.1.4. Man macht sich leicht klar, dass der Schnitt einer
beliebigen Familie von σ-Algebren wieder eine σ-Algebra ist. Ist daher
E ⊂ P(X) irgendeine Teilmenge, so existiert eine kleinste σ-Algebra
A (E ), die E enthält, genannt die von E erzeugte σ-Algebra. Man erhält
sie, indem man alle σ-Algebren, die E enthalten, schneidet:
\
A (E ) =
B.
B⊃E
B ist σ-Algebra
Beispiel 1.1.5. Ist (X, O) ein topologischer Raum, dann nennt man die
von der Topologie O erzeugte σ-Algebra die Borel-σ-Algebra. Sie
enthält alle offenen und alle abgeschlossenen Mengen. Die Elemente
dieser Algebra heißen Borel-messbare Mengen.
Proposition 1.1.6. Die Borel-σ-Algebra auf R wird erzeugt von
• der Menge aller offenen Intervalle (a, b), oder der Menge aller
abgeschlossenen Intervalle [a, b],
• der Menge aller links halboffenen Intervalle (a, b], oder der Menge aller
rechts halboffenen Intervalle [a, b),
Analysis 3
4
• der Menge aller Intervalle der Form (−∞, a) mit a ∈ R, oder der Menge
aller Intervalle (−∞, a],
• der Menge aller Intervalle der Form (a, ∞) mit a ∈ R, oder der Menge
aller Intervalle [a, ∞).
Die analogen Resultate gelten für die erweiterten reellen Zahlen
[−∞, +∞] = R ∪ {−∞, +∞}.
Später in Satz 1.4.13 wird gezeigt, dass nicht jede Teilmenge von R zur
Borel σ-Algebra gehört.
Beweis. Sei O die Topologie auf R und sei J die Menge aller offenen
Intervalle. Da J ⊂ O, folgt A (J ) ⊂ A (O). Andererseits ist jede offene
Menge eine abzählbare Vereinigung von offenen Intervallen, also ist
auch A (O) ⊂ A (J ).
Jedes abgeschlossene Intervall [a, b] ist ein abzählbarer Schnitt von
offenen Intervallen:
[a, b] =
\
n∈N
1
1
a − ,b + .
n
n
Andererseits ist jedes offene Intervall (a, b) eine abzählbare Vereinigung
abgeschlossener Intervalle:
(a, b) =
[
n∈N
1
1
a + ,b − .
n
n
Damit erzeugen die abgeschlossenen Intervalle dieselbe σ-Algebra wie
die offenen. Die anderen Fälle werden ähnlich behandelt.
Analysis 3
1.2
5
Messbare Abbildungen
Definition 1.2.1. Sind (X, A ) und (Y, B) Messräume, so heißt eine
Abbildung f : X → Y eine messbare Abbildung, falls
f −1 (B) ∈ A
für jedes B ∈ B.
Mit anderen Worten, eine Abbildung ist messbar, wenn Urbilder
messbarer Mengen messbare Mengen sind. Diese Definition steht in
perfekter Analogie zur Definition der Stetigkeit von Abbildungen
zwischen topologischen Räumen.
Eine Abbildung f : X → Y von einem Messraum in einen topologischen
Raum Y nennt man Borel-messbar, wenn sie bezüglich der
Borel-σ-Algebra messbar ist.
Proposition 1.2.2. Seien (X, A ) und (Y, B) Messräume. Ist E ein Erzeuger
der σ-Algebra B, so ist eine Abbildung f : X → Y genau dann messbar, wenn
f −1 (E) ∈ A
für jedes
E ∈ E.
Insbesondere ist jede stetige Abbildung zwischen topologischen Räumen
messbar, wenn man Definitionsbereich und Bildbereich mit der jeweiligen
Borel-σ-Algebra versieht.
Beweis. Ist f messbar, so ist die Bedingung klar. Für die Umkehrung sei
f −1 (E ) ⊂ A . Setze
n
o
f∗ A = B ⊂ Y : f −1 (B) ∈ A .
Die Menge f∗ A ist eine σ-Algebra auf Y, denn zunächst ist ∅ ∈ f∗ A ,
denn f −1 (∅) = ∅ ∈ A . Ist weiter B ∈ f∗ A , dann folgt
Analysis 3
6
f −1 (Bc ) = f −1 (B)c ∈ A . Seien schließlich B1 , B2 , . . . in f∗ A , dann ist
[ [
f −1 B j =
f −1 (B j ) ∈ A ,
j
also folgt
S
j Bj
j
∈ f∗ A . Damit ist f∗ A eine σ-Algebra, die den Erzeuger
E enthält, damit enthält sie auch B und daher ist f messbar.
Insbesondere folgt, dass eine Abbildung f von einem Messraum in
einen topologischen Raum genau dann Borel-messbar ist, wenn für jede
offene Menge U das Urbild f −1 (U) messbar ist.
Satz 1.2.3. Seien X, Y, Z Messräume und seien f : X → Y und g : Y → Z
messbare Abbildungen. Dann ist g ◦ f : X → Z messbar.
Beweis. Sei C ⊂ Z messbar, dann ist g−1 (C) ⊂ Y messbar, also ist
(g ◦ f )−1 (C) = f −1 g−1 (C) ⊂ X messbar.
Definition 1.2.4. Eine messbare Abbildung f : X → R oder f : X → C
von einem Messraum X heißt messbare Funktion. Hierbei werden R
und C mit der jeweiligen Borel-σ-Algebra versehen.
Satz 1.2.5. Seien u, v : X → R messbare Funktionen und sei Φ : R2 → Y
eine stetige Abbildung in einen topologischen Raum Y. Definiere
h(x) = Φ (u(x), v(x))
für x ∈ X. Dann ist h : X → Y messbar.
Analysis 3
7
Beweis. Auch R2 wird mit der Borel-σ-Algebra versehen, also der
σ-Algebra, die von den offenen Mengen in R2 erzeugt wird. Sei
f (x) = (u(x), v(x)), dann ist f eine Abbildung von X nach R2 . Nach
Proposition 1.2.2 und Satz 1.2.3 reicht es, zu zeigen, dass f messbar ist.
Ist R = I × J ein offenes Rechteck in R2 , dann ist f −1 (R) = u−1 (I) ∩ v−1 (J),
also ist f −1 (R) messbar. jede offene Menge V in R2 ist eine abzählbare
Vereinigung von offenen Rechtecken Ri und da
∞
∞
[ [
−1
−1
f (V) = f Ri =
f −1 (Ri )
i=1
i=1
messbar ist, ist die Abbildung f messbar.
Proposition 1.2.6.
a) Ist f = u + iv, wobei u, v reellwertige messbare
Funktionen sind, dann ist f eine komplexwertige messbare Funktion.
b) Ist f = u + iv eine komplexwertige messbare Funktion, dann sind u, v
und | f | messbare Funktionen.
c) Sind f, g komplexwertige messbare Funktionen, so sind f + g und f g
messbar.
d) Ist A ⊂ X eine messbare Menge, dann ist 1A eine messbare Funktion.
Hierbei ist
1
1A (x) =
0
x ∈ A,
x < A,
die charakteristische Funktion der Menge A.
e) Ist f eine komplexe messbare Funktion, dann existiert eine komplexe
messbare Funktion α mit |α| = 1 so dass f = α| f |.
Beweis. (a) folgt aus Satz 1.2.5 mit Φ(x, y) = x + iy. (b) und (c) folgen
ebenfalls leicht aus diesem Satz. (d) ist offensichtlich.
Analysis 3
8
Für (e) sei A = f −1 ({0}), dann ist A messbar und also 1A messbar. Sei
φ(z) = z/|z| für z , 0 und setze α(x) = φ f (x) + 1A (x) . Dann hat α die
verlangten Eigenschaften.
Definition 1.2.7. Zum Begriff des Limes Superior: Sei a1 , a2 , . . . eine
Folge reeller Zahlen und sei
n
o
bn = sup an , an+1 , . . .
Dann ist die Folge bn ∈ R ∪ {+∞} monoton fallend. Daher existiert der
Limes limn→∞ bn in [−∞, +∞]. Er wird der Limes superior der Folge (ak )
genannt und in der Form lim supn→∞ an oder limn→∞ an geschrieben.
Das heißt, es gilt
lim an = lim sup an = lim sup ak .
n
n
n
k≥n
Analog definiert man den Limes inferior als
lim an = lim inf an = lim inf ak .
n→∞
n→∞
n
k≥n
Es gilt stets limn an ≤ limn an und die Folge (an ) konvergiert genau dann
in [−∞, +∞], wenn die beiden gleich sind. Ferner ist der Limes inferior
der kleinste Häufungspunkt der Folge und der Limes superior der
größte.
Sei fn eine Folge von Funktionen auf X mit Werten in [−∞, ∞]. Dann
sind supn fn und limn fn die Funktionen
(sup fn )(x) = sup fn (x) ,
n
n
(lim fn )(x) = lim fn (x) .
n
n
Analysis 3
9
Konvergiert die Folge fn (x) für jedes x, dann wird die Funktion
f (x) = lim fn (x)
n
der punktweise Limes der Folge fn genannt.
Satz 1.2.8. Ist fn : X → [−∞, ∞] messbar für jedes n ∈ N, dann sind die
Funktionen
g = lim fn
und
n
h = lim fn
n
messbar.
Beweis. Es reicht, die Messbarkeit von g einzusehen. Der Beweis fuer h
geht dann analog. Zunächst ist
g
−1
∞ [
∞
\
−1
(a, ∞] =
fn (a, ∞] .
k=1 n=k
Um dies einzusehen betrachte x ∈ R, es gilt
x ∈ g−1 ((a, ∞]) ⇔ g(x) > a
⇔ lim fn (x) > a
n
⇔ fn (x) > a für unendlich viele n
⇔ für jedes n gibt es ein k ≥ n mit fk (x) > a
⇔ für jedes n gibt es ein k ≥ n mit x ∈ fk−1 ((a, ∞])
[
⇔ für jedes n gilt x ∈
fk−1 ((a, ∞])
k≥n
⇔x∈
∞ [
\
fk−1 ((a, ∞]).
n=1 k≥n
Die Menge fk−1 ((a, ∞]) ist für jedes k messbar, daher ist für jedes n die
Analysis 3
Menge
S
10
−1
k≥n fk ((a, ∞])
messbar, also ist auch die Menge
∞ [
\
fk−1 ((a, ∞]) = g−1 ((a, ∞])
n=1 k≥n
messbar. Die Intervalle der Form (a, ∞] erzeugen nach Proposition 1.1.6
die σ-Algebra auf [−∞, ∞] und nach Proposition 1.2.2 ist g messbar.
Korollar 1.2.9.
a) Der punktweise Limes von messbaren komplexen
Funktionen ist messbar.
b) Sind f, g : X → [−∞, ∞] messbar, dann sind auch max( f, g) sowie
min( f, g) messbar. Insbesondere sind
f+ = max( f, 0)
und
f− = − min( f, 0)
messbar.
Beweis. (a) Sei f = limn fn . Man zerlegt f und die Funktionen fn in Realund Imaginärteil und kann so annehmen, dass alle Funktionen
reellwertig sind. Dann ist aber f = limn fn und damit messbar nach dem
Satz.
Die Aussage (b) folgt aus Satz 1.2.5, da die Funktion Φ(x, y) = max(x, y)
stetig ist.
Definition 1.2.10. Eine einfache Funktion auf einem Messraum X ist
eine messbare Funktion s : X → C, die nur endlich viele Werte annimmt,
für die es also disjunkte messbare Mengen A1 , . . . , An ⊂ X gibt, so dass
s=
n
X
j=1
für eindeutig bestimmte c j ∈ C.
c j 1A j
Analysis 3
11
Satz 1.2.11. Sei f : X → [0, ∞] eine messbare Funktion. Dann gibt es
einfache Funktionen sn : X → [0, ∞) so dass die Folge (sn ) punktweise
gegen f konvergiert und stets sn ≤ sn+1 gilt. Das heißt, jede nichtnegative
messbare Funktion ist punktweise monotoner Limes von einfachen
Funktionen.
Beweis. Für n ∈ N und 1 ≤ j ≤ n2n sei
"
!!
j
j
−
1
,
und
En, j = f −1
2n 2n
Setze
Fn = f [n, ∞] .
−1
n2n
X
j−1
sn =
1En, j + n1Fn .
2n
j=1
Die Mengen En, j und Fn sind messbar und die Folge sn konvergiert
monoton wachsend gegen f .
1.3
Maße
Ein Maß ist eine abzählbar additive Funktionen auf einer σ-Algebra.
Additivität auf beliebigen Familien wäre zuviel verlangt, denn dann
wäre jedes Maß, das einelementige Mengen {x} auf Null abbildet, schon
identisch Null.
Definition 1.3.1. Ein Maß auf einer σ-Algebra A ist eine Abbildung
µ : A → [0, ∞],
Analysis 3
12
die σ-additiv ist, d.h., es gilt
∞
∞
[
X
µ A j =
µ(A j ),
j=1
j=1
falls die A j ∈ A disjunkt sind. Um das triviale Beispiel auszuschließen,
verlangt man noch, dass es ein A ∈ A gibt, mit µ(A) < ∞.
Ein Maß µ heißt endlich, wenn µ(X) < ∞ gilt.
Beispiele 1.3.2.
• Das Zählmaß auf einer beliebigen Menge X ist
erklärt durch
|A| falls A endlich,
µ(A) =
∞ sonst.
Das Zählmaß ist auf der ganzen Potenzmenge P(X) erklärt.
• Ist X eine Menge und x0 ∈ X ein Punkt, dann ist die Abbildung
δx0 : P(X) → R,
1 x0 ∈ A,
δx0 (A) =
0 x < A,
ein Maß, genannt das Punktmaß in x0 .
• Nun ein Beispiel eines Maßes, das nicht auf der ganzen
Potenzmenge erklärt ist. Sei X eine überabzählbare Menge und A
die (co-)abzählbar σ-Algebra. Definiere ein Maß µ auf A durch
0 falls A abzählbar,
µ(A) =
1 falls Ac abzählbar.
• Ist (X, O) ein topologischer Raum, so heißt ein Maß µ, das auf der
Borel-σ-Algebra erklärt ist, ein Borel-Maß auf X.
• Später wird gezeigt werden, dass es ein Borel-Maß λ auf R gibt, so
Analysis 3
13
dass λ [a, b] = b − a für alle a < b in R gilt. Analog gibt es ein
Borel-Maß λn auf Rn , das jedem Quader sein natürliches Volumen
zuordnet. Das Maß λn ist eindeutig bestimmt, es wird das
Lebesgue-Maß auf Rn genannt. Es folgt, dass λ({x}) = 0 für jedes
x ∈ R und folglich ist λ(M) = 0 für jede abzählbare Menge M ⊂ R.
Definition 1.3.3. Ein Tripel (X, A , µ) bestehend aus einer Menge X,
einer σ-Algebra A auf X und einem Maß µ auf A nennt man einen
Maßraum.
Satz 1.3.4. Sei (X, A , µ) ein Maßraum.
a) Es gilt µ(∅) = 0.
b) Das Maß µ ist endlich additiv, d.h. für paarweise disjunkte Mengen
A1 , . . . , An ∈ A gilt
µ(A1 ∪ · · · ∪ An ) = µ(A1 ) + · · · + µ(An ).
c) Das Maß ist monoton, d.h. für A, B ∈ A mit A ⊂ B gilt
µ(A) ≤ µ(B).
d) Das Maß µ ist stetig von unten, d.h., ist (An )n∈N eine aufsteigende
S
Familie messbarer Mengen, also An ⊂ An+1 und gilt A = ∞
n=1 An , so
konvergiert µ(An ) für n → ∞ gegen µ(A).
e) Das Maß µ ist bedingt stetig von oben, d.h., ist A =
T∞
n=1 An
An ∈ A und An ⊃ An+1 , und gilt außerdem µ(A1 ) < ∞, so
konvergiert µ(An ) für n → ∞ gegen µ(A).
mit
Analysis 3
14
Bemerkung: Die Bedingung µ(A1 ) < ∞ im letzten Beispiel ist wirklich
erforderlich, wie das Beispiel des Lebesgue-Maßes λ zeigt, denn mit
An = (n, ∞) hat man A = ∅, aber λ(An ) = ∞ für jedes n.
Beweis. (a) Nach Voraussetzung gibt es ein A ∈ A mit µ(A) < ∞. Sei
nun A1 = A und A2 = A3 = · · · = ∅. Dann sind die A j paarweise disjunkt
und es folgt
∞
X
j=1
[
µ(A j ) = µ A j = µ(A1 ) = µ(A) < ∞.
j
Daraus folgt µ(∅) = µ(A2 ) = 0. Die Aussage (b) ist klar indem man
Ak = ∅ für k > n setzt und die σ-Additivität ausnutzt. Teil (c) folgt aus
· und also µ(B) = µ(A) + µ(C) ≥ µ(A).
(b), denn mit C = B r A ist B = A∪C
Für (d) sei Bn = An r An−1 , falls n ≥ 2 und B1 = A1 . Dann ist A die
P
disjunkte Vereinigung der B j und also konvergiert µ(An ) = nj=1 µ(B j )
gegen µ(A). Für (e) sei Bn = A1 r An , dann ist Bn ⊂ Bn+1 und
S
n Bn = A1 r A. Also konvergiert µ(Bn ) = µ(A1 ) − µ(An ) gegen
µ(A1 ) − µ(A), da µ(A1 ) < ∞, folgt µ(An ) → µ(A).
1.4
Das Lebesgue-Maß
Das Ziel dieses Abschnitts ist es, ein Maß auf der Borel-σ-Algebra von
R zu konstruieren, das den Intervallen ihre Länge zuordnet, sowie die
Eindeutigkeit eines solchen Maßes zu zeigen. Ein vernünftiger Ansatz
scheint zu sein, eine beliebige Menge durch Intervalle zu überdecken,
deren Längen zu addieren und das Infimum über alle Überdeckungen
zu nehmen.
Analysis 3
15
Definition 1.4.1. Für A ⊂ R setze
∞
∞
X
[
η(A) = inf
L(I
)
:
I
Intervalle,
A
⊂
I
.
j
j
j
j=1
j=1
Hierbei bezeichnet L(I) die Länge eines Intervalls I.
Proposition 1.4.2. Die Abbildung η hat folgende Eigenschaften:
a) η(∅) = 0,
b) η ist monoton, d.h.: A ⊂ B ⇒ η(A) ≤ η(B),
S
P∞
c) η ist abzählbar subadditiv, d.h. η ∞
A
j=1 j ≤
j=1 η(A j ).
Beweis. (a) Für A = {a1 , a2 , . . . } und gegebenes ε > 0 definiere die
P
Intervalle I j = (a j − 2 εj+1 , a j + 2 εj+1 ). Dann ist η(A) ≤ j L(I j ) ≤ ε. Da ε
beliebig ist, folgt η(A) = 0.
Die Aussage (b) ist klar. Teil (c) folgt aus der Tatsache, dass man
abzählbare Überdeckungen der A j zu einer abzählbaren Überdeckung
der Vereinigung zusammenfassen kann.
Die Abbildung η, ist sogar auf der ganzen Potenzmenge definiert,
allerdings ist sie nur subadditiv. Es wird sich allerdings zeigen, dass sie
auf der Borel-σ-Algebra tatsächlich ein Maß ist. Dazu betrachtet man
allgemeiner Abbildungen, die die oben genannten Eigenschaften von η
haben und zeigt, dass sie auf geeigneten σ-Algebren schon Maße sind.
Definition 1.4.3. Sei X eine Menge. Ein äußeres Maß ist eine
Abbildung η : P(X) → [0, ∞] mit
• η(∅) = 0,
• η ist monoton: gilt A ⊂ B, so ist η(A) ≤ η(B),
Analysis 3
16
• η ist σ-subadditiv: für jede Folge A j von Teilmengen von X ist
∞
∞
[ X
η An ≤
η(An ).
n=1
n=1
Der nun folgende Messbarkeitsbegriff stammt von dem griechischen
Mathematiker Constantin Carathéodory und stellt einen ebenso
geschickten, wie überraschenden Kunstgriff dar.
Definition 1.4.4. sei η ein äußeres Maß auf X. Eine Menge E ⊂ X heißt
η-messbar, falls für jede Teilmenge Q ⊂ X gilt
η(Q) = η(Q ∩ E) + η(Q ∩ Ec ).
Da η subadditiv ist, ist diese Eigenschaft äquivalent zu
η(Q) ≥ η(Q ∩ E) + η(Q ∩ Ec ).
Sei L die Menge aller η-messbaren Teilmengen von X.
Proposition 1.4.5.
a) E ∈ L ⇔ Ec ∈ L .
b) ∅ ∈ L und X ∈ L .
c) η(E) = 0 ⇒ E ∈ L .
d) E, F ∈ L ⇒ E ∪ F ∈ L .
e) E, F ∈ L ⇒ E ∩ F ∈ L , E r F ∈ L .
Beweis. (a) ist klar, da die Definition symmetrisch ist. Aussage (b) ist
klar. Für (c) sei η(E) = 0. Für eine beliebige Teilmenge Q ⊂ X folgt
wegen der Monotonie, dass
0 ≤ η(Q ∩ E) ≤ η(E) = 0,
Analysis 3
17
also η(Q ∩ E) = 0 und damit, wieder wegen Monotonie
η(Q) ≥ η(Q ∩ Ec ) = η(Q ∩ E) + η(Q ∩ Ec ),
also ist E messbar.
Für (d) seien E, F ∈ L und sei Q ⊂ X beliebig. Wegen der Messbarkeit
von E und F ergibt sich
η Q ∩ (E ∪ F)) + η(Q ∩ (E ∪ F)c
= η(Q ∩ (E ∪ F) ∩ E) + η(Q ∩ (E ∪ F) ∩ Ec )
+ η(Q ∩ Ec ∩ Fc ∩ E) + η(Q ∩ Ec ∩ Fc ∩ Ec )
|
{z
}
=∅
= η(Q ∩ E) + η(Q ∩ F ∩ Ec ) + η(Q ∩ Ec ∩ Fc )
|
{z
}
=η(Q∩Ec )
= η(Q ∩ E) + η(Q ∩ Ec ) = η(Q).
Damit ist (d) bewiesen. Schließlich folgt (e) aus E ∩ F = (Ec ∪ Fc )c und
E r F = E ∩ Fc .
Satz 1.4.6. Sei η ein äußeres Maß auf einer Menge X und sei L das System
der η-messbaren Mengen. Dann ist L eine σ-Algebra und η|L ist ein Maß.
Beweis. Das System L enthält die leere Menge und ist stabil unter
Komplementbildung. Es bleibt also zu zeigen, dass es stabil unter
abzählbaren Vereinigungen ist. Seien E1 , E2 , · · · ∈ L . Es ist zu zeigen,
S
S
dass E = j E j in L liegt. Die Mengen Fn = En r j<n E j liegen in L
und ihre Vereinigung ist E, so dass angenommen werden kann, dass die
E j paarweise disjunkt sind.
Analysis 3
18
Lemma 1.4.7. Für jedes Q ⊂ X gilt
n
n
[
X
η Q ∩ E j =
η(Q ∩ E j )
j=1
j=1
und ebenso für n → ∞,
∞
∞
[
X
η Q ∩ E j =
η(Q ∩ E j )
j=1
j=1
Beweis. Da En ∈ L , gilt
n
n
n
[
[
[
η Q ∩ E j = η Q ∩ E j ∩ En + η Q ∩ E j ∩ Ecn
j=1
j=1
j=1
n−1
[
= η(Q ∩ En ) + η Q ∩ E j .
j=1
Mit Induktion folgt die erste Aussage des Lemmas. Für die zweite
beachte
n
n
∞
[
[
X
η(Q ∩ E j ).
E j =
η Q ∩
E j ≥ η Q ∩
j=1
j=1
j=1
Mit n → ∞ wird daraus η Q ∩
S∞
j=1 E j ≥
P∞
j=1 η(Q
∩ E j ). Die andere
Ungleichung folgt aus der Subadditivität.
Zum Beweis des Satzes sei Q ⊂ X und sei E =
S
j E j.
Dann gilt
c
n
n
n
[
[
X
η(Q) = η Q ∩
E j + η Q ∩ E j ≥
η(Q ∩ E j ) + η(Q ∩ Ec ).
j=1
j=1
j=1
Analysis 3
19
Für n → ∞ folgt
∞
X
η(Q) ≥
η(Q ∩ E j ) + η(Q ∩ Ec ) = η(Q ∩ E) + η(Q ∩ Ec ).
j=1
Damit ist E messbar und also ist L eine σ-Algebra. Schließlich, dass η|L
in Maß ist, folgt aus Lemma 1.4.7 mit Q = X.
Nun zurück zu X = R und dem äußeren Maß η, das durch
Überdeckungen durch Intervalle definiert ist. Das äußere Maß η wird
das Lebesguesche äußere Maß genannt.
Proposition 1.4.8. Sei η das Lebesguesche äußere Maß auf R. Für jedes
Intervall I ⊂ R gilt η(I) = L(I). Ferner ist jedes Intervall η-messbar.
Beweis. Man kann I durch sich selbst überdecken und erhält also
S
η(I) ≤ L(I). Ist andererseits I ⊂ j I j mit Intervallen I j , so folgt
P
j L(I j ) ≥ L(I). Für die zweite Aussage ist zu zeigen, dass für ein
Intervall I und jede Teilmenge Q ⊂ R die Abschätzung
η(Q ∩ I) + η(Q ∩ Ic ) ≤ η(Q)
gilt. Sei nun ε > 0 und Q ⊂
S
j Ij
eine abzählbare Überdeckung durch
Intervalle mit
η(Q) ≤
X
L(I j ) < η(Q) + ε.
j
Dann ist I j ∩ I eine abzählbare Überdeckung von Q ∩ I durch Intervalle,
P
also gilt η(Q ∩ I) ≤ j L(I j ∩ I). Jedes I j ∩ Ic ist die Vereinigung von
höchstens zwei Intervallen. Die Summen der Längen dieser Intervalle
wird mit L(I j ∩ Ic ) bezeichnet. Es folgt
L(I j ) = L(I j ∩ I) + L(I j ∩ Ic ).
Analysis 3
20
Die Folge (I j ∩ Ic ) ist eine abzählbare Überdeckung von Q ∩ Ic durch
P
Intervalle, also folgt auch η(Q ∩ Ic ) ≤ j L(I j ∩ Ic ). Zusammen gibt das
η(Q ∩ I) + η(Q ∩ I ) ≤
c
X
L(I j ∩ I) + L(I j ∩ I ) =
j
c
X
L(I j ) < η(Q) + ε.
j
Da ε beliebig ist, folgt η(Q ∩ I) + η(Q ∩ Ic ) ≤ η(Q), also ist I messbar. Definition 1.4.9. Eine Menge E ⊂ R heißt Lebesgue-messbar, wenn sie
messbar bezüglich des Lebesgueschen äußeren Maßes η ist.
Die Menge aller L Lebesgue-messbaren Teilmengen von R wird auch
die Lebesgue-σ-Algebra genannt.
Satz 1.4.10. L ist eine σ-Algebra, die die Borel-σ-Algebra umfasst und die
translationsinvariant ist in dem Sinne dass A + x ∈ L gilt für jedes
A ∈ L und jedes x ∈ R. Ferner ist λ = η|L ein Maß, das
translationsinvariant ist, d.h., λ(A + x) = λ(A) für jedes A ∈ L .
Beweis. Das äußere Maß η ist translationsinvariant, da die
Längenfunktion auf Intervallen translationsinvariant ist. Die
Translationsinvarianz von L folgt aus der Translationsinvarianz von η.
Im letzten Abschnitt wurde gezeigt, dass L eine σ-Algebra ist, also
folgt schon, dass es die Borel-σ-Algebra B umfasst, da L alle Intervalle
enthält, die ja die σ-Algebra B erzeugen.
Satz 1.4.11 (Eindeutigkeit des Lebesgue-Maßes). Ist B die
Borel-σ-Algebra auf R und ist µ ein Maß auf B mit µ(I) = L(I) für jedes
Intervall, dann ist µ = η|B .
Analysis 3
21
Beweis. Sei µ wie im Satz und sei A ∈ B. Ist A ⊂
S
j Ij
eine abzählbare
Überdeckung durch Intervalle, dann ist
X
[ X
µ(A) ≤ µ I j ≤
µ(I j ) =
L(I j ).
j
j
j
Nimmt man das Infimum der rechten Seite, erhält man für jede
Teilmenge A ⊂ R die Abschätzung µ(A) ≤ η(A). Für k ∈ Z sei
Ak = A ∩ [k, k + 1). Dann gilt
1 − µ(Ak ) = µ [k, k + 1) r Ak ≤ η [k, k + 1) r Ak = 1 − η(Ak ),
also µ(Ak ) ≥ η(Ak ), mithin also µ(Ak ) = η(Ak ), woraus folgt
µ(A) =
X
k
µ(Ak ) =
X
η(Ak ) = η(A).
k
Analog sieht man, dass auf Rn genau ein Borel-Maß existiert, das jedem
Quader sein euklidisches Volumen zuordnet.
Die Existenz nichtmessbarer Mengen
Hier soll gezeigt werden, dass die Lebesgue-σ-Algebra L nicht gleich
der ganzen Potenzmenge von R ist. Das heißt also, dass es Mengen
gibt, die nicht Lebesgue-messbar sind.
Definition 1.4.12. Sei ∼ eine Äquivalenzrelation auf einer Menge M.
Ein Vertretersystem von ∼ ist eine Teilmenge R ⊂ M so dass es zu
jedem m ∈ M genau ein r ∈ R gibt, so dass m ∼ r.
Das heißt also, dass R jede Äquivalenzklasse in genau einem Punkt
schneidet. Die Existenz eines Vertretersystems für jede
Äquivalenzrelation folgt aus dem Auswahlaxiom.
Analysis 3
22
Satz 1.4.13. Es gibt Teilmengen von R, die nicht Lebesgue-messbar sind.
Beweis. Auf dem Einheitsintervall [0, 1] betrachte die
Äquivalenzrelation
x∼y
⇔
y − x ∈ Q.
Sei R ⊂ I ein Vertretersystem. Dann ist R nicht Lebesgue-messbar, denn
angenommen, R ist messbar, dann ist das Maß λ(R) definiert. Da
R ⊂ [0, 1], ist 0 ≤ λ(R) ≤ 1. Sei
[
M=
(q + R)
q∈Q∩[−1,1]
da q + R und q0 + R disjunkt sind falls q , q0 , so folgt
λ(M) =
X
X
λ(q + R) =
q∈Q∩[−1,1]
λ(R),
q∈Q∩[−1,1]
wobei im letzten Schritt die Translationsinvarianz von λ benutzt
wurde. Da diese Summe unendlich ist, folgt λ(M) = 0 oder λ(M) = ∞, je
nachdem, ob λ(R) = 0 oder nicht. Es gilt aber
[0, 1] ⊂ M ⊂ [−1, 2],
was also 0 < λ(M) < ∞ zur Folge hat, ein Widerspruch!
Satz 1.4.14.
a) Jede offene Menge U ⊂ R ist eine disjunkte abzählbare
Vereinigung offener Intervalle.
b) Ist U =
[
· ∞
j=1
I j wie in (a), so folgt λ(U) =
∞
X
j=1
L(I j ).
Analysis 3
23
c) Für jede Lebesgue-messbare Menge E ⊂ R gilt
λ(E) = inf λ(U).
U⊃E
U offen
Man sagt hierzu, das Lebesgue-Maß ist regulär von außen.
d) Für jede Lebesgue-messbare Menge A ⊂ R, gilt
λ(A) = sup λ(K).
K⊂A
K kompakt
Man sagt hierzu, das Lebesgue-Maß ist regulär von innen.
Beweis. Sei ∅ , U ⊂ R offen. Für jedes x ∈ U sei
Ux =
[
I.
x∈I⊂U
I offenes Intervall
Dann ist Ux eine Vereinigung offener Mengen, also offen. Die Menge U
ist sogar ein Intervall, denn mit a, b ∈ Ux und a ≤ b folgt [a, b] ⊂ Ux wie
man leicht sieht, indem man die Fälle a ≤ x ≤ b, sowie a ≤ b ≤ x und
x ≤ a ≤ b separat betrachtet.
Es wird nun gezeigt, dass die Intervalle Ux paarweise gleich oder
disjunkt sind, somit also U disjunkt in offene Intervalle zerlegen.
Hierzu reicht es zu zeigen, dass für je zwei x, y ∈ U gilt
Ux = U y
oder Ux ∩ U y = ∅.
Es gelte also Ux ∩ U y , ∅. Es reicht Ux ⊂ U y zu zeigen, denn die
Umkehrung gilt dann aus Symmetriegründen. Ohne Beschränkung der
Allgemeinheit werde x < y angenommen. Da Ux und U y Intervalle sind,
Analysis 3
24
gibt es also ein x < z < y mit z ∈ Ux ∩ U y . Sei nun a ∈ Ux beliebig und sei
L ⊂ Ux ein offenes Intervall, das x und a enthält. Sei I ⊂ Ux ein offenes
Intervall mit x, z ∈ I und sei J ⊂ U y ein offenes Intervall mit z, y ∈ J.
Dann ist I ∪ J ∪ L ein offenes Intervall in U, das x, y, z und a enthält.
Damit folgt a ∈ U y , also aus Symmetrie Ux = U y .
S
Es gilt demnach U = · α∈M Uα mit offenen Intervallen Uα . Da die
Vereinigung disjunkt ist, können nur abzählbar viele von diesen
Intervallen eine Länge >
1
n
haben für gegebenes n ∈ N. Da dies für jedes
n gilt, gibt es nur abzählbar viele solcher Intervalle , ∅.
(b) ist klar.
(c) Sei E ⊂ R Lebesgue-messbar. Ist λ(E) = ∞, so ist auch λ(U) = ∞ für
jedes offene U ⊃ E und die Behauptung folgt. Sei also λ(E) < ∞. Sei
S
ε > 0 und sei (In ) eine Folge von Intervallen mit E ⊂ n In und
λ(E) ≤
∞
X
L(In ) < λ(E) + ε/2.
n=1
Zu jedem n wähle ein offenes Intervall Un ⊃ In mit Länge
L(Un ) = L(In ) + ε/2n+1 . Dann ist
λ(E) ≤
∞
X
L(Un ) < λ(E) + ε.
n=1
Es existiert also eine offene Menge U ⊃ E mit λ(E) ≤ λ(U) < λ(E) + ε,
S
nämlich die offene Menge U = n Un . Die Aussage (c) folgt.
Nun zu (d). Sei A ⊂ R Lebesgue-messbar und sei An = [−n, n] ∩ A.
Angenommen, es gilt (d) für die beschränken Mengen An , dann gibt es
zu jedem n eine Folge von Kompakta Knj mit Knj ⊂ Knj+1 ⊂ An so dass
Analysis 3
25
λ(An ) = lim j λ(Knj ). Dann ist
λ(A) = lim λ(An ) = lim lim λ(Knj ),
n
n
j
woraus (d) folgt. Es reicht also, (d) für eine beschränkte Menge A zu
zeigen. Sei also A ⊂ (−T, T) für ein T > 0. Es ist dann
λ(A) = 2T − λ((−T, T) r A) = 2T − inf λ(U).
U⊃B
| {z }
U offen
=B
Es reicht, das Infimum über solche U zu erstrecken, die in (−T, T)
liegen. Für ein solches U ist die Menge KU = (−T, T) r U kompakt,
zumindest nach eventueller Vergrößerung von T, und es gilt KU ⊂ A.
Ferner ist λ(U) = 2T − λ(KU ), also
λ(A) = 2T − inf (2T − λ(KU ))
U⊃B
U offen
= 2T − 2T + sup λ(KU ) ≤
U⊃B
U offen
sup
λ(K) ≤ λ(A).
K⊂A
K kompakt
Definition 1.4.15. Sei (X, A , µ) ein Maßraum. Eine Menge N ∈ A mit
µ(N) = 0 heißt µ-Nullmenge oder einfach nur Nullmenge. Eine
Eigenschaft, die außerhalb einer Nullmenge gilt gilt fast überall, oder
µ-fast überall. Sind zum Beispiel zwei Funktionen f, g gleich außerhalb
einer Nullmenge, sagt man, dass f = g fast überall gilt.
Eine messbare Funktion f , die fast überall gleich Null ist, nennt man
auch Nullfunktion. Die Menge der C-wertigen Nullfunktionen ist ein
komplexer Vektorraum.
Eine Nullmenge bezüglich des Lebesgue-Maßes heißt
Lebesgue-Nullmenge.
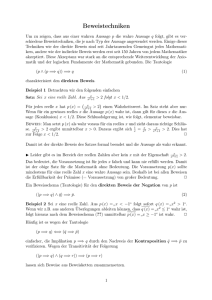
Beispiel 1.4.16. Das Cantor-Diskontinuum ist eine
Analysis 3
26
Lebesgue-Nullmenge, die besondere Bedeutung hat, da sie auf Grund
ihrer Eigenschaften für viele Aussagen als Gegenbeispiel dient. Es sei
C0 := [0, 1] und C1 entstehe aus C0 indem man das offene innere Drittel
(1/3, 2/3) entfernt. Als nächstes entsteht C2 aus C1 indem man aus
jedem der beiden Teilintervalle das mittlere offene Drittel entfernt.
Durch Wiederholung dieses Prozesses entsteht eine Folge Cn von
Mengen, wobei Cn aus 2n abgeschlossenen Intervallen besteht und Cn+1
entsteht aus Cn , indem man bei jedem Teilintervall das mittlere offene
Drittel entfernt.
C0
[
C1
[
C2
[
]
]
[
]
[
]
[
]
]
[
]
Cn
3
Cn
3
Man kann den Konstruktionsschritt auch durch Cn+1 :=
∪ +
T∞
ausdrücken. Die Menge C := n=1 Cn wird das Cantor-Diskontinuum
2
3
genannt. Es gilt
• Für x ∈ R gilt x ∈ C genau dann, wenn
x=
∞
X
xn 3−n , xn ∈ {0, 2} für alle n ∈ N,
n=1
• Die Menge C hat die gleiche Kardinalität wie R,
• Es gilt λ(C) = 0.
Beweis. Das Cantor-Diskontinuum ist als Schnitt von abgeschlossenen
Mengen wieder abgeschlossen, also messbar. Da Cn+1 aus Cn durch
Entnahme eines Drittels entsteht, gilt λ(Cn+1 ) = 23 λ(Cn ), also
λ(Cn ) = (2/3)n und diese Folge geht gegen Null, also ist C eine
Nullmenge.
Analysis 3
27
Nun zur triadischen Entwicklung. Ist x ∈ C0 , etwa x =
beginnt die triadische Entwicklung von
2
3
x
3
P∞
−n
n=1 xn 3 ,
dann
mit einer Null und die von
+ x3 mit einer 2. Also enthält C1 genau die Zahlen mit einer triadischen
Entwicklung, die mit einer 0 oder einer 2 beginnt. Dies setzt sich fort, so
dass Cn genau die Zahlen mit einer triadischen Entwicklung enthält,
deren erste n Ziffern nur aus Zweien und Nullen bestehen. Im Limes
folgt die Behauptung. Schließlich folgt aus dem Vergleich der
triadischen Entwicklung mit der dyadischen, dass die Abbildung
C → [0, 1],
∞
X
n=1
−n
xn 3
7→
∞
X
x
n −n
n=1
2
2
eine Bijektion ist. Also ist C gleichmächtig zum Einheitsintervall und
dies wiederum ist gleichmächtig zu R.
Satz 1.4.17. Eine Menge A ⊂ R ist genau dann Lebesgue-messbar, wenn
es zu jedem ε > 0 eine abgeschlossene Teilmenge C ⊂ R und eine offene
Teilmenge U ⊂ R gibt, so dass C ⊂ A ⊂ U und λ(U r C) < ε gilt. Jede
Lebesgue-messbare Menge A ist von der Gestalt A = F ∪ L, wobei F
Borel-messbar ist und L ist Teilmenge einer Borel-messbaren Nullmenge.
Die Lebesgue σ-Algebra L ⊂ P(R) hat die gleiche Mächtigkeit wie P(R).
Man kann zeigen, dass die Borel-σ-Algebra B auf R die Mächtigkeit |R|
hat. Die Algebra L ist also erheblich größer.
Beweis. Sei A Lebesgue-messbar und sei ε > 0. Für k ∈ Z sei
Ak = A ∩ [k, k + 1). Nach Satz 1.4.14 existiert ein Kompaktum Kk ⊂ Ak mit
Analysis 3
28
λ(Ak r Kk ) < ε/2|k|+2 . Die Menge C =
λ(A r C) <
X
S
k Kk
ist abgeschlossen und es gilt
ε/2|k|+2 = ε/2.
k∈Z
Wieder nach Satz 1.4.14 existiert für jedes k ∈ Z eine offene Menge
S
Uk ⊃ Ak mit λ(Uk r Ak ) < ε/2|k|+2 . Mit der Bezeichnung U = k∈Z Uk
folgt
λ(U r A) ≤
X
λ(Uk r Ak ) < ε/2.
k∈Z
Zusammen folgt λ(U r C) < ε. Für die umgekehrte Richtung sei
zunächst festgehalten, dass jede Menge der Gestalt A = F ∪ L wie im
Satz Lebesgue-messbar ist, da jede Teilmenge L einer Borel-messbaren
Nullmenge eine Lebesgue-messbare Menge ist. Nun sei A ⊂ R so dass
die Bedingung des Satzes gilt. Für jedes n ∈ N gibt es dann eine
abgeschlossene Menge Cn und eine offene Un mit Cn ⊂ A ⊂ Un und
S
T
λ(Un r Cn ) < n1 . Sei F = n Cn , und E = n Un . Dann sind F und E
Borel-messbar, es gilt
F ⊂ A ⊂ E,
und
λ(E r F) = 0.
Sei also N = E r F, dann ist N eine Nullmenge. Sei L = A r F, dann ist
L ⊂ N, also ist L eine Teilmenge einer Nullmenge und A = F ∪ L ist
Lebesgue-messbar.
Für die Zusatzaussage sei C das Cantor-Diskontinuum. Dies ist eine
Nullmenge λ(C) = 0, die die gleiche Mächtigkeit wie R hat, also folgt
L ⊃ P(C) und wegen |P(C)| = |P(R)| folgt die Behauptung.
Satz 1.4.18. Sei (X, A , µ) ein Maßraum. Sei Abdas System aller
Teilmengen der Form A ∪ L, wobei L eine Teilmenge einer µ-Nullmenge ist.
Analysis 3
29
Dann ist Abeine σ-Algebra und
b
µ(A ∪ L) = µ(A)
ein Maß b
µ auf Ab, das µ fortsetzt. Man nennt (X, Ab, b
µ) die
Vervollständigung von (X, A , µ).
Beweis. Sei A ∪ L ∈ Abund sei N eine Nullmenge, die L enthält. Dann ist
(A ∪ L)c = Ac ∩ Lc = (Ac ∩ Nc ) ∪ (Ac ∩ (N r L)) .
|
{z
}
⊂N
Daher ist (A ∪ L)c wieder in Ab. Seien nun A j ∈ Abfür j ∈ N, etwa
A j = B j ∪ L j mit L j ⊂ N j und µ(N j ) = 0. Dann ist
[
j
[ [
A j = B j ∪ Ll .
j
j
| {z }
⊂
S
j
Nj
S
S
Da µ( j N j ) = 0 ist auch j A j wieder in Ab.
µ muss zunächst die Wohldefiniertheit bewiesen werden.
Für das Maß b
Hierfür sei A ∪ L = A0 ∪ L0 mit Nullmengen N ⊃ L und N0 ⊃ L0 . Es ist zu
zeigen, dass µ(A) = µ(A0 ) gilt. Hierzu beachte
A r A0 ⊂ (A ∪ L) r A0 ⊂ [(A ∪ L) r (A0 ∪ L0 )] ∪L0 ⊂ N0 .
|
{z
}
=∅
Also ist µ(A r A0 ) = 0 und aus Symmetriegründen auch µ(A0 r A) = 0,
was bedeutet, dass µ(A) = µ(A0 ) ist. Dass die so definierte Funktion b
µ
ein Maß ist, ist sofort klar, dass sie µ fortsetzt auch.
Analysis 3
30
Korollar 1.4.19. Das Lebesgue-Maß λ ist die Vervollständigung des auf die
Borel-Mengen eingeschränkten Lebesgue-Maßes.
Beweis. Dies ist klar nach Satz 1.4.17 und Satz 1.4.18.
Analysis 3
2
31
Integration
2.1
Integrale positiver Funktionen
Definition 2.1.1. Für eine einfache Funktion
s=
n
X
c j 1A j ,
c j > 0,
j=1
mit paarweise verschiedenen c j und paarweise disjunkten A j wird die
Zahl
Z
s(x) dµ(x) =
n
X
X
c j µ(A j ) ∈ [0, ∞]
j=1
das Integral von s genannt. Hierbei ist die Darstellung von s in der
P
Form s = nj=1 c j 1A j nicht eindeutig, da man zum Beispiel eines der A j in
zwei disjunkte Teile zerlegen kann, wegen der Additivität von µ ist das
Integral aber eindeutig bestimmt.
Lemma 2.1.2. Seien s, t einfache Funktionen mit Werten in [0, ∞), dann gilt
Z
Z
s≤t ⇒
s(x) dµ(x) ≤
t(x) dµ(x),
X
sowie
Z
X
Z
s(x) + t(x) dµ(x) =
X
Z
s(x) dµ(x) +
X
t(x) dµ(x).
X
Ist c ≥ 0, so gilt
Z
Z
cs(x) dµ(x) = c
X
s(x) dµ(x).
X
Beweis. Indem man die Urbilder s−1 (x) und t−1 (x) schneidet, findet man
eine disjunkte Familie A1 , . . . , An von messbaren Teilmengen , ∅, so
Analysis 3
32
dass sich s und t in der Form
s=
n
X
c j 1A j ,
t=
n
X
j=1
d j 1A j
j=1
schreiben lassen. Ist dann s ≤ t, so folgt c j ≤ d j für jedes j, woraus die
P
erste Aussage folgt. Wegen s + t = nj=1 (c j + d j )1A j folgt die zweite
Aussage. Die dritte ist trivial.
Definition 2.1.3. Ist f : X → [0, ∞] eine messbare Funktion, so definiert
man das Integral durch
Z
Z
s(x) dµ(x),
f (x) dµ(x) = sup
X
X
s≤ f
wobei das Supremum über alle einfachen Funktionen s mit 0 ≤ s ≤ f
erstreckt wird. Ist A ⊂ X messbar, so setze
R
R
f
(x)
dµ(x)
=
1 (x) f (x) dµ(x). Wenn Verwechslungen nicht zu
A
X A
befürchten sind, schreibt man auch einfacher
Z
f dµ
A
statt
R
A
f (x) dµ(x). Der Funktionswert +∞ wird hierbei aus
beweistechnischen Gründen zugelassen.
Beispiele 2.1.4.
• Ist µ das Zählmaß und f ≥ 0, so gilt
Z
X
f dµ =
f (x),
X
x∈X
wobei die rechte Seite durch
X
x∈X
definiert ist.
f (x) = sup
X
E⊂X x∈E
endlich
f (x)
Analysis 3
33
Proposition 2.1.5. Seien f, g : X → [0, ∞] messbare Funktionen.
a) Ist f ≤ g, so folgt
R
A
f dµ ≤
R
A
g dµ.
b) Ist f : X → [0, ∞] messbar, sind weiter A, B ⊂ X messbar und disjunkt,
so gilt
Z
Z
Z
f dµ +
f dµ =
c) Sind C ⊂ D messbar, so gilt
B
A
A∪B
R
f dµ.
R
f dµ ≤ D f dµ
R
R
d) ist 0 ≤ c < ∞ eine Konstante, so gilt A c f dµ = c A f dµ.
R
e) Ist µ(A) = 0, dann ist A f dµ = 0, sogar wenn f (x) = ∞ für jedes x ∈ A.
R
f) Ist X f dµ < ∞, dann ist die Menge f −1 (∞) = {x ∈ X : f (x) = ∞} eine
C
Nullmenge und für jedes c > 0 hat die Menge f −1 ((c, ∞)) endliches Maß.
Beweis. Die Aussage (a) ist klar, falls f und g einfache Funktionen sind.
Sind f, g beliebige messbare Funktionen mit Werten in [0, ∞], dann gilt
für jede einfache Funktion s ≤ f schon s ≤ g, daher folgt die
Behauptung.
(b) Es gibt Folgen einfacher Funktionen 0 ≤ sn , tn , pn ≤ f , so dass
Z
Z
Z
Z
Z
Z
sn %
f,
tn %
f und
pn %
f.
A
A
B
B
A∪B
A∪B
Wobei verlangt werden kann, dass sn ≡ 0 außerhalb von A und tn ≡ 0
außerhalb von B und pn ≡ 0 außerhalb von A ∪ B gilt.
Indem man sn durch max(s1 , . . . , sn ) ersetzt, kann man sn als punktweise
monoton wachsend voraussetzen und ebenso für tn und pn . Indem man
alle drei durch max(sn , tn , pn ) ersetzt, kann man annehmen, dass sie alle
drei gleich sn sind. Die Aussage ist für sn klar, damit folgt sie für f .
Analysis 3
34
Die Aussage (c) folgt aus
R
D
=
R
+
C
R
DrC
und dem letzten Teil. Aussage
(d) ist klar, da sie für einfache Funktionen gilt. Für (e) sei g die Funktion,
die nur den Wert ∞ annimmt. Dann gilt 0 ≤ f ≤ g und es reicht zu
R
zeigen, dass A g dµ = 0 ist. Nun ist sn = n1A eine Folge einfacher
Funktionen, die monoton wachsend gegen g1A konvergiert, also ist
Z
Z
Z
g1A dµ = lim
sn dµ = 0,
g dµ =
n
X
A
X
da jedes einzelne Integral Null ist. Für (f) schließlich sei A = f −1 (∞),
R
R
dann ist c1A ≤ f für jedes c > 0. also ist cµ(A) = X c1A dµ ≤ X f dµ < ∞
für jedes c > 0. Es folgt µ(A) = 0. Schließlich sei c > 0 und
R
R
A = f −1 ((c, ∞)), so gilt µ(A) = 1c X c1A (x) dµ(x) ≤ 1c X f (x) dx < ∞.
Satz 2.1.6 (Satz von der monotonen Konvergenz). Es sei
fn : X → [0, ∞] eine Folge messbarer Funktionen mit fn ≤ fn+1 . Sei
f (x) = limn fn (x) für jedes x ∈ X, dann ist f messbar und
Z
Z
lim
fn dµ =
f dµ.
n
X
X
Beweis. Die Messbarkeit von f wurde in Satz 1.2.8 bewiesen. Da nun
R
R
R
f
≤
f
,
gibt
es
ein
α
∈
[0,
∞]
mit
f dµ → α. Da fn ≤ f folgt
X nR
X n+1
X n
α ≤ X f dµ. Sei s eine einfache Funktion mit 0 ≤ s ≤ f und sei c eine
Konstante mit 0 < c < 1. Für n ∈ N definiere
En = {x ∈ X : fn (x) ≥ cs(x)}.
Dann ist jedes En messbar und es gilt E1 ⊂ E2 ⊂ E3 ⊂ . . . , sowie
Analysis 3
X=
S
n En .
35
Weiter gilt
Z
Z
Z
s dµ
fn dµ ≥ c
fn dµ ≥
En
En
X
R
Mit n → ∞ wird daraus α ≥ c X s dµ. Da dies für jedes 0 < c < 1 gilt,
R
folgt α ≥ X s dµ. Da dies für jedes einfache s mit 0 ≤ s ≤ f gilt, folgt
R
schließlich α ≥ X f dµ.
Proposition 2.1.7. Seien f, g : X → [0, ∞] messbar.
a) Es gilt
R
X
f dµ = limn
R
s dµ
X n
für jede Folge von einfachen Funktionen,
sn die monoton wachsend gegen f konvergiert.
R
R
R
b) Es ist X ( f + g) dµ = X f dµ + X g dµ.
R
R
c) Ist c ≥ 0, so gilt X c f (x) dµ(x) = c X f (x) dµ(x).
Beweis. Teil (a) ist ein Spezialfall des Satzes von der monotonen
Konvergenz. Für Teil (b) gilt nach Lemma 2.1.2 für einfache
Funktionen. Seien dann sn % f und tn % g Folgen einfacher
Funktionen, die nach Satz 1.2.11 existieren. Dann konvergiert sn + tn
monoton wachsend gegen f + g und also gilt
!
Z
Z
Z
Z
( f + g) dµ = lim (sn + tn ) dµ = lim
sn dµ +
tn dµ
n
n
X
X
X
X
Z
Z
Z
Z
= lim
sn dµ + lim
tn dµ =
f dµ +
g dµ.
n
X
n
X
X
X
Teil (c) folgt ähnlich.
Korollar 2.1.8. Seien fn : X → [0, ∞] messbare Funktionen. Dann gilt
Z X
∞
X n=1
fn dµ =
∞ Z
X
n=1
fn dµ.
X
Analysis 3
36
Insbesondere gilt für alle Doppelfolgen ai, j ≥ 0, i, j ∈ N,
∞ X
∞
X
ai, j =
i=1 j=1
∞ X
∞
X
ai, j .
j=1 i=1
Beweis. Die erste Aussage folgt durch Anwendung des Satzes der
P
monotonen Konvergenz auf die Folge gn = nj=1 f j . Das Beispiel der
Doppelfolgen ergibt sich, wenn man X = N und als µ das Zählmaß
wählt.
Satz 2.1.9. Sei f : X → [0, ∞] messbar und für A ∈ A sei
Z
τ(A) =
f dµ.
A
Dann ist τ ein Maß auf A und es gilt
R
g dτ =
X
R
X
g f dµ für jede messbare
Funktion g : X → [0, ∞].
Man schreibt die zweite Aussage auch sinnfällig als dτ = f dµ.
Beweis. Es gilt τ(∅) = 0. Seien A1 , A2 , . . . disjunkte Elemente von A und
S
P
sei A = j A j . Dann gilt 1A f = j 1A j f. Es folgt
τ(A) =
Z X
X
j
1A j f dµ =
XZ
j
Aj
f dµ =
X
τ(A j )
j
nach dem Satz der monotonen Konvergenz. Damit ist τ also ein Maß.
R
R
Schließlich gilt X g dτ = X g f dµ, falls g = 1A für eine messbare Menge
A. Wegen Linearität gilt es dann für einfache Funktionen und nach dem
Satz der monotonen Konvergenz gilt die Formel allgemein.
Analysis 3
2.2
37
Integrale komplexer Funktionen
Definition 2.2.1. Sei L 1 (µ) die Menge aller messbaren Funktionen
f : X → C für die gilt
Z
| f | dµ < ∞,
X
wobei | f | die Funktion x 7→ | f (x)| ist. Man nennt die Funktionen in
L 1 (µ) Lebesgue-integrierbar oder einfach nur integrierbar.
Definition 2.2.2. Ist h eine reellwertige Funktion, so setze
h+ (x) = max(h(x), 0),
h− (x) = max(−h(x), 0).
Dann sind h+ und h− positiv und es gilt
h = h+ − h−
sowie h+ h− = 0.
Lemma 2.2.3. Ist f = u + iv eine C-wertige messbare Funktion, wobei u, v
reellwertig sind und ist f ∈ L 1 (µ), dann sind auch u± , v± in L 1 (X). In
diesem Fall definiert man
Z
Z
Z
Z
Z
f dµ =
u+ dµ −
u− dµ + i
v+ dµ − i
v− dµ ∈ C.
X
X
X
X
X
Beweis. Die Messbarkeit der Funktionen u und v ist in Proposition 1.2.6
bewiesen worden. Die Messbarkeit von u± und v± folgt aus derselben
Aussage oder aus Satz 1.2.5. Schließlich gilt 0 ≤ u+ (x) ≤ | f (x)|, was die
Integrierbarkeit von u+ beweist. Für die anderen Funktionen gilt
dasselbe.
Satz 2.2.4. Seien f, g ∈ L 1 (µ) und α, β ∈ C. Dann ist α f + βg ∈ L 1 (µ)
Analysis 3
38
und es gilt
Z
Z
Z
f dµ + β
α f + βg dµ = α
g dµ.
X
X
X
Beweis. Die Messbarkeit von α f + βg folgt aus Proposition 1.2.6. Es gilt
Z
Z
|α|| f | + |β||g| dµ
|α f + βg| dµ ≤
XZ
X
Z
| f | dµ + |β|
|g| dµ < ∞.
= |α|
X
X
Also ist α f + βg ∈ L 1 (µ). Die Linearität des Integrals folgt aus
Proposition 2.1.7.
R
R
Satz 2.2.5. Ist f ∈ L 1 (µ), dann gilt X f dµ ≤ X | f | dµ.
Beweis. Sei z =
R
X
f dµ ∈ C. Dann existiert α ∈ C mit |α| = 1 und αz = |z|.
Sei u der Realteil von α f . Dann ist u ≤ |α f | = | f |. Also
Z
Z
Z
Z
Z
f dµ = α
f dµ =
α f dµ =
u dµ ≤
| f | dµ.
X
X
X
X
X
Lemma 2.2.6 (Lemma von Fatou). Sei fn : X → [0, ∞] eine Folge messbarer
Funktionen, dann gilt
Z
Z
(lim fn ) dµ ≤ lim
X
n
n
fn dµ.
X
R
R
Beweis. Sei gk (x) = inf j≥k f j (x). Dann gilt gk ≤ fk , also X gk dµ ≤ X fk dµ
R
R
und damit limk X gk dµ ≤ limk X fk dµ. Ferner ist die Folge gk monoton
Analysis 3
39
wachsend, also folgt nach dem Satz der monotonen Konvergenz,
Z
Z
Z
Z
gk dµ ≤ lim
(lim fn ) dµ =
lim gk dµ = lim
fk dµ.
X
n
X
k
k
X
k
X
Satz 2.2.7 (Satz von der dominierten Konvergenz). Sei fn eine Folge
von messbaren komplexwertigen Funktionen auf X so dass der Limes
f (x) = limn→∞ fn (x) für jedes x ∈ X existiert. Es existiere eine Funktion
g ∈ L 1 (µ) so dass | fn | ≤ g für jedes n ∈ N. Dann gilt f ∈ L 1 (µ) und
Z
Z
lim
fn dµ =
f dµ.
n
X
X
Dieser Satz ist auch unter dem Namen Satz von Lebesgue bekannt.
Beweis. Da | f | ≤ g und g integrierbar ist, ist f ∈ L 1 (µ). Da | fn − f | ≤ 2g,
kann man das Lemma 2.2.6 auf die Funktionen 2g − | fn − f | anwenden
und erhält
Z
Z
Z
Z
2g dµ − lim
| fn − f | dµ.
2g dµ ≤ lim (2g − | fn − f |) dµ =
X
n
X
X
n
X
R
R
Nach Subtraktion von X 2g dµ erhält man limn X | fn − f | dµ ≤ 0. Also
R
folgt limn X | fn − f | dµ = 0. Wegen
Z
Z
Z
f
dµ
−
f
dµ
| fn − f | dµ → 0
n
≤
X
X
X
folgt die Behauptung.
Satz 2.2.8. Sei fn eine Folge messbarer Funktionen mit
P∞ R
P∞
|
f
|
dµ
<
∞.
Dann
konvergiert
die
Reihe
f
(x)
=
n
n=1 X
n=1 fn (x) für fast
Analysis 3
40
alle x ∈ X. Sei f (x) = 0 falls die Reihe in x nicht absolut konvergiert. Die so
definierte Funktion f liegt in L 1 (µ) und es gilt
Z
f dµ =
X
Beweis. Sei φ(x) =
∞ Z
X
n=1
fn dµ.
X
P∞
n=1 | fn (x)|.
Nach dem Satz der monotonen
R
Konvergenz und der Voraussetzung gilt X φ(x) dµ < ∞. Sei
N = {x ∈ X : φ(x) = ∞}. Nach Proposition 2.1.5 ist N eine Nullmenge,
also konvergiert die Reihe f (x) außerhalb einer Nullmenge absolut. Da
P
PN
| f (x)| ≤ φ(x), ist f ∈ L 1 (µ) und wegen | N
n=1 fn (x)| ≤
n=1 | fn (x)| ≤ φ(x)
folgt die letzte Aussage aus dem Satz der dominierten Konvergenz.
Satz 2.2.9.
a) Sei f : X → [0, ∞] messbar mit
R
X
f dµ = 0. Dann ist f
eine Nullfunktion.
b) Sei f ∈ L 1 (µ) und
R
E
f dµ = 0 für alle messbaren E ⊂ X. Dann ist f
eine Nullfunktion.
R
R
c) Ist f ∈ L (µ) mit X f dµ = X | f | dµ. Dann existiert eine
1
Konstante α ∈ C mit |α| = 1, so dass α f = | f | fast überall in x gilt.
Beweis. (a) Für n ∈ N sei En = {x ∈ X : f (x) ≥ n1 }. Dann ist En messbar
und es gilt
Z
µ(En ) =
S
n En
f dµ = 0.
1 dµ ≤ n
En
Daher ist auch E =
Z
En
eine Nullmenge. Außerhalb von E
verschwindet f , ist also eine Nullfunktion.
Analysis 3
41
R
(b) Setze f = u + iv und E = {x ∈ X : u(x) ≥ 0}. Der Realteil von E f dµ ist
R
dann E u+ dµ und aus (a) folgt, dass u+ eine Nullfunktion ist. Analog
sieht man, dass u− , v+ , v− und schließlich f Nullfunktionen sind.
R
R
(c) Es existiert α so dass α X f dµ = X | f | dµ. Aus der Voraussetzung
folgt, dass α mit |α| = 1 gewählt werden kann. Seien u, v Real- und
Imaginärteil von α f , also α f = u + iv. Es muss gezeigt werden, dass fast
überall α f = u+ gilt, dass also v und u− Nullfunktionen sind. Es ist
R
R
R
R
R
| f | dµ = α X f dµ = X u dµ + i X v dµ, also X v dµ = 0 und
RX
R √
u
dµ
=
u2 + v2 dµ, woraus sich ergibt, dass v eine Nullfunktion
X
X R
R
R
R
R
ist. Weiter ist X u+ dµ − X u− dµ = X |u| dµ = X u+ dµ + X u− dµ, also ist
u− eine Nullfunktion.
2.3
Parameter und Riemann-Integrale
In diesem Abschnitt werden nützliche Kriterien hergeleitet, die
sicherstellen, dass Integrale über Funktionen, die von einem Parameter
abhängen, stetige oder differenzierbare Funktionen liefern und dass
Limiten und Differentiale mit dem Integral vertauscht werden dürfen.
Ferner wird gezeigt, dass Riemann-Integrale auch als
Lebesgue-Integrale verstanden werden können, die Lebesguesche
Theorie also in der Tat allgemeiner ist.
Satz 2.3.1 (Stetige Abhängigkeit von einem Parameter). Sei (X, A , µ)
ein Maßraum. Sei T ein metrischer Raum und die Funktion f : T × X → C
habe folgende Eigenschaften:
a) Für jedes t ∈ T ist f (t, ·) ∈ L 1 (µ),
b) Für µ-fast alle x ∈ X ist f (·, x) : T → C stetig im Punkte t0 ∈ T.
Analysis 3
42
c) Es gibt eine integrierbare Funktion g auf X, so dass für jedes t ∈ T gilt
µ − fast überall.
| f (t, ·)| ≤ g
Hierbei darf die Ausnahmemenge Nt von t abhängen. Die
Vereinigung aller Nt braucht keine Nullmenge mehr zu sein.
Dann ist die Funktion F : T → C,
Z
f (t, x) dµ(x)
F(t) =
X
stetig im Punkt t0 .
Beweis. Sei tn eine Folge in T mit Limes t0 . Eine Anwendung des Satzes
der dominierten Konvergenz auf die Folge fn (x) = f (tn , x) liefert die
Behauptung. Hierbei wird der Satz außerhalb der Nullmenge
N = N0 ∪
[
Ntn
n∈N
angewendet, wobei N0 die Ausnahmemenge von Bedingung (b) ist,
d.h., für jedes x ∈ X, das nicht in der Nullmenge N liegt, ist f (·, x) in t0
stetig.
Satz 2.3.2 (Differentiation unter dem Integralzeichen). Seien I ⊂ R ein
Intervall, t0 ∈ I und f : I × X → C habe folgende Eigenschaften:
a) Für jedes t ∈ I gilt f (t, ·) ∈ L 1 .
b) Die partielle Ableitung
∂f
∂t (t0 , x)
existiert für fast alle x ∈ X
Analysis 3
43
c) Es gibt g ∈ L 1 so dass für jedes t ∈ I gilt
f (t, x) − f (t0 , x) ≤ g(x) fast überall in x ∈ X.
t − t0
Hierbei darf die Ausnahmemenge Nt von t abhängen. Die
Vereinigung aller Nt braucht keine Nullmenge mehr zu sein.
Dann ist die Funktion F : I → C,
Z
f (t, x) dµ(x)
F(t) =
X
im Punkt t0 differenzierbar,
∂f
∂t (t0 , ·)
Z
F0 (t0 ) =
ist integrierbar und es gilt
∂f
(t0 , x) dµ(x).
X ∂t
Zusatz. Die Bedingung (c) kann durch folgende Bedingung ersetzt
werden:
(c*) Für jedes t existiert
∂f
∂t (t, x)
fast überall in X und es gibt g ∈ L 1 mit
∂ f
∂t (t, x) ≤ g(x)
fast überall in x ∈ X.
Hierbei darf die Ausnahmemenge von t abhängen.
Beweis. Sei tn → t0 eine Folge in I. Die Aussage folgt mit dem Satz über
majorisierte Konvergenz. Der Zusatz folgt mit dem Mittelwertsatz der
Differentialrechnung.
Analysis 3
44
Satz 2.3.3. Sei f auf dem kompakten Intervall [a, b] ⊂ R
Riemann-integrierbar. Dann ist f messbar und Lebesgue-integrierbar und
es gilt
b
Z
Z
f (x) dx =
a
f (x) dλ(x).
[a,b]
Beweis. Die Gleichheit der Integrale ist klar für Riemannsche
Treppenfunktionen. Seien sn und tn Riemannsche Treppenfunktionen
mit tn ≤ tn+1 ≤ f ≤ sn+1 ≤ sn für jedes n und
R
Rb
t
−
s
dλ
=
t − sn → 0. Die Folge tn − sn ist ≥ 0 und monoton
n
[a,b] n
a n
fallend. Sei g ≥ 0 ihr punktweiser Limes. Nach dem Satz der
R
R
dominierten Konvergenz ist [a,b] g dλ = limn [a,b] tn − sn dλ = 0. nach Satz
2.2.9 ist g eine Nullfunktion, also gibt es eine Nullmenge N mit g ≡ 0
außerhalb von N, d.h., außerhalb von N konvergiert die Folge tn − sn
punktweise gegen Null, also konvergiert sn auf Nc gegen f . Insgesamt
ist die Folge sn monoton wachsend und beschränkt, konvergiert also
punktweise gegen eine messbare Funktion f˜. Es gilt f˜ = f außerhalb
einer Nullmenge, also ist auch f Lebesgue-messbar und es gilt
Z
Z
f˜ dλ = lim
f dλ =
[a,b]
[a,b]
n
Z
b
Z
sn =
a
b
f (x) dx.
a
Satz 2.3.4 (Uneigentliche Integrale). Sei I ein Intervall und f : I → C
sei Riemann-integrierbar auf jedem kompakten Teilintervall von I. Es gilt:
f ist genau dann über I in Lebesgueschem Sinne integrierbar, wenn | f |
uneigentlich Riemann-integrierbar über I ist. In diesem Fall stimmt das
uneigentliche Riemann-Integral von f über I mit dem Lebesgue-Integral
überein.
Analysis 3
45
Da in diesem Satz die uneigentliche Integrierbarkeit von | f | und nicht
die von f verlangt wird, kann es uneigentliche Riemann Integrale
R∞
geben, die keine Lebesgue-Integrale sind. Ein Beispiel ist 1 sinx x dx.
Beweis. Es reicht, den Fall eines offenen Intervalls zu betrachten, da der
Fall eines halboffenen Intervalls ähnlich behandelt wird. Es es seien also
I = (a, b) mit −∞ ≤ a < b ≤ ∞ und a < an < bn < b Folgen mit an & a und
bn % b. Dann ist f = limn f 1[an ,bn ] ein punktweiser Limes messbarer
Funktionen also messbar. Weiter gilt nach dem Satz der monotonen
Konvergenz
Z
bn
Z
| f (x)| dx = lim
lim
n
Z
n
an
| f |1[an ,bn ] dλ =
| f | dλ.
I
I
Ist | f | uneigentlich Riemann-integrierbar, dann ist die linke Seite
endlich, also auch die rechte und f ist Lebesgue-integrierbar. Ist
umgekehrt die Funktion f Lebesgue-integrierbar, so ist die rechte Seite
endlich, also auch die linke und f ist uneigentlich
Riemann-integrierbar. Ist dies der Fall, so liefert der Satz über die
majorisierten Konvergenz mit Majorante | f |,
Z
bn
lim
n
2.4
Z
Z
f (x) dx = lim
n
an
f 1[an ,bn ] dλ =
I
f dλ.
I
Komplexwertige Maße
Definition 2.4.1. Sei (X, A ) ein Messraum. Ein komplexwertiges Maß
auf A ist eine Abbildung µ : A → C, die σ-additiv ist, die also
∞
∞
[
X
µ(E j )
µ E j =
j=1
j=1
Analysis 3
46
für jede Folge E j ∈ A paarweise disjunkter Mengen erfüllt, wobei die
Summe absolut konvergiert.
Zur Unterscheidung werden Maße mit Werten in [0, ∞] in diesem
Abschnitt positive Maße genannt.
Beispiel 2.4.2. Beispiel: Sei µ ein positives Maß und sei f ∈ L1 (µ). Dann
ist
Z
τ(E) =
f dµ
E
ein komplexes Maß, wie aus dem Satz der dominierten Konvergenz
folgt.
Es soll nun gezeigt werden, dass jedes komplexwertige Maß von dieser
Form ist, also als Integral einer Funktion über ein positives Maß
geschrieben werden kann. Zunächst kann jedes komplexwertige Maß
in Real- und Imaginärteil zerlegt werden, diese sind dann reellwertige
Maße.
Definition 2.4.3. Eine messbare Teilmenge N ⊂ X heißt µ-Nullmenge
für ein komplexwertiges Maß µ, falls
µ(S) = 0
für jede messbare Teilmenge S ⊂ N.
Satz 2.4.4 (Hahns Zerlegungssatz). Sei τ : A → R ein reellwertiges
Maß. Dann gibt es disjunkte messbare Mengen X− , X+ ⊂ X mit
X = X− ∪ X+ ,
so dass τ(A ∩ X+ ) ≥ 0 und τ(A ∩ X− ) ≤ 0 für jedes messbare A ⊂ X gilt.
Man definiert
τ+ (A) = τ(A ∩ X+ )
und τ− (A) = −τ(A ∩ X− )
Analysis 3
47
Dann sind τ+ und τ− positive Maße und τ = τ+ − τ− . Sei f = 1X+ − 1X−
dann folgt
Z
τ(A) =
f d|τ|,
A
wobei |τ| das positive Maß τ+ + τ− ist. Die Mengen X± sind bis auf
Nullmengen eindeutig festgelegt.
Definition 2.4.5. Man nennt das positive Maß |τ| auch die
Totalvariation von τ.
Eine messbare Menge P ⊂ X heißt τ-positive Menge, falls τ(T) ≥ 0 für
jede messbare Teilmenge T von P.
Lemma 2.4.6. Jede messbare Teilmenge A ⊂ X enthält eine positive Teilmenge
P ⊂ A mit τ(P) ≥ τ(A).
Beweis des Lemmas. Ist τ(A) ≤ 0, so kann man P = ∅ wählen. Sei also
τ(A) > 0 angenommen.
Zunächst wird gezeigt: Zu jedem ε > 0 gibt es eine Teilmenge A[ε] mit
τ(A[ε]) ≥ τ(A) und τ(T) > −ε für jede messbare Teilmenge T ⊂ A[ε].
Angenommen, für ein ε > 0 gäbe es eine solche Menge A[ε] nicht. Dann
enthält jede messbare Teilmenge C ⊂ A mit τ(C) ≥ τ(A) eine messbare
Menge B mit τ(B) ≤ −ε. Induktiv erhält man eine Folge messbarer
Mengen B1 ⊂ A, Bk ⊂ A r (B1 ∪ · · · ∪ Bk−1 ) so dass τ(Bk ) ≤ −ε. Da die Bk
S
disjunkt sind, folgt τ( k Bk ) = −∞, Widerspruch!
Sei nun A1 = A[1] und induktiv sei An+1 = An [1/n] gesetzt. Dann ist (An )
T
eine fallende Folge von Mengen mit τ(An ) ≥ τ(A) so dass P = n An
positiv ist und τ(P) ≥ τ(A) gilt.
Beweis des Satzes. Sei α = sup{τ(A) : A ∈ A } ∈ [0, ∞]. Dann existiert eine
Analysis 3
48
Folge positiver Mengen Pn mit τ(Pn ) → α. Die Menge X+ =
S
n Pn
ist
positiv und X− = X r X+ muss strikt negativ sein, denn sobald sie eine
Teilmenge A positiven Maßes enthält, folgt τ(X+ ∪ A) > α, was ein
Widerspruch ist.
Nun zum Schluss die Eindeutigkeit der Zerlegung. Sei X+0 ∪ X−0 eine
zweite Zerlegung, es ist dann zu zeigen, dass X+ ∆X+0 und X− ∆X−0
Nullmengen sind. Beide sind Teilmengen von X+ ∩ X−0 vereinigt mit
X− ∩ X+0 . Die Menge X+ ∩ X−0 ist positiv als Teilmenge von X+ , aber auch
negativ als Teilmenge von X−0 , also ist sie eine Nullmenge. Ebenso ist
X− ∩ X+0 eine Nullmenge.
Definition 2.4.7. Sind µ, ν komplexwertige Maße auf X, so schreibt man
µ ⊥ ν,
· gibt, wobei A eine
falls es eine disjunkte Zerlegung X = A∪B
µ-Nullmenge und B eine ν-Nullmenge ist.
Analysis 3
49
3 Lp-Räume
3.1
Einige Ungleichungen
In diesem Abschnitt werden die Ungleichungen von Hölder und
Minkowski bewiesen. Die Minkowski-Ungleichung ist gerade die
Dreiecksungleichung der Lp -Norm, die im nächsten Abschnitt
betrachtet wird.
Lemma 3.1.1. Seien 1 < p, q < ∞ mit p1 +
1
q
= 1. Für alle 0 ≤ a, b ≤ ∞ gilt
dann die Abschätzung ab ≤ p1 ap + 1q bq .
Beweis. Ist eine der beiden Zahlen a, b gleich Null oder Unendlich, dann
ist die Abschätzung trivialerweise erfüllt. Sei also 0 < a, b < ∞. Für fest
gewähltes a ist zu zeigen, dass die stetig differenzierbare Funktion
f (x) = 1p ap + 1q xq − ax für jedes x > 0 die Ungleichung f (x) ≥ 0 erfüllt. Es
1
ist f 0 (x) = xq−1 − a und damit hat f ein Minimum an der Stelle x0 = a q−1 .
Es ist also
1
1 1
1
1
1
f (x) ≥ f (x0 ) = ap + (a q−1 )q − aa q−1 = ap + ap − ap = 0.
p
q
p
q
Satz 3.1.2. Seien 1 < p, q < ∞ mit p1 +
1
q
= 1. Für messbare Funktionen
f, g : X → [0, ∞] gelten dann
a) die Hölder-Ungleichung
Z
X
!1/q
gq dµ
f p dµ
f g dµ ≤
und
!1/p Z
Z
X
X
Analysis 3
50
b) die Minkowski-Ungleichung
!1/p
Z
( f + g)p dµ
!1/p
Z
f p dµ
≤
+
.
gp dµ
X
X
X
!1/p
Z
Beweis. Seien A und B die beiden Faktoren auf der rechten Seite der
Hölder-Ungleichung. Ist A = 0, so ist f eine Nullfunktion, damit ist f g
eine Nullfunktion und und die linke Seite von der Ungleichung
verschwindet. Für A = ∞ ist die Ungleichung ebenfalls trivial. Es reicht
g
f
also, den Fall 0 < A, B < ∞ zu betrachten. Setze F = A , G = B , dann ist
R
R
p
F dµ = X Gq dµ = 1. Lemma 3.1.1 liefert F(x)G(x) ≤ 1p F(x)p + 1q G(x)q .
X
R
Durch Integration folgt X FG dµ ≤ 1p + 1q = 1. Dies ist die behauptete
Hölder-Ungleichung.
Zum Beweis der Minkowski-Ungleichung schreibe
( f + g)p = f ( f + g)p−1 + g( f + g)p−1 .
Die Hölder-Ungleichung liefert
Z
!1/p Z
Z
f ( f + g)p−1 ≤
X
!1/q
( f + g)(p−1)q
fp
X
.
(∗)
X
Sei (∗∗) dieselbe Ungleichung mit f und g vertauscht. Da (p − 1)q = p ist,
ergibt die Addition von (∗) und (∗∗),
!1/q Z
!1/p
!1/p
Z
( f + g)p ≤
( f + g)p
fp
+
gp
X
X
X
X
!1−1/p Z
!1/p
!1/p
Z
Z
=
( f + g)p
fp
+
gp .
Z
Z
X
X
X
Analysis 3
51
1−1/p
R
p
p
(
f
+
g)
dividiert werden,
(
f
+
g)
,
0,
∞,
so
kann
durch
X
X
R
was die Behauptung liefert. Ist X ( f + g)p = 0, so ist die
Ist
R
Minkowski-Ungleichung trivialerweise erfüllt. Ist schließlich
R
( f + g)p = ∞, so liefert die Konvexität der Funktion tp für 0 < t < ∞
X
f +g p
die Ungleichung 2
≤ 21 ( f p + gp ). Folglich ist in diesem Fall auch die
rechte Seite der Minkowski-Ungleichung gleich ∞.
3.2
Vollständigkeit
Definition 3.2.1. Für 1 ≤ p < ∞ und eine komplexwertige messbare
Funktion f auf X sei
!1/p
Z
f =
| f |p dµ
.
p
x
Es sei L p (µ) die Menge aller f mit f p < ∞. Ist g : X → C messbar so
setzt man
g = inf{a > 0 : |g| ≤ a fast überall }.
∞
Man nennt g∞ die wesentliche Schranke von g oder auch die
∞-Norm. Es bezeichne L ∞ (µ) die Menge aller messbaren Funktionen
g : X → C mit g < ∞.
∞
Satz 3.2.2. Seien 1 ≤ p, q ≤ ∞ mit 1p +
1
q
= 1.
a) Ist f ∈ L p (µ) und g ∈ L q (µ), so ist f g ∈ L 1 (µ) und es gilt
f g ≤ f g .
q
p
1
b) Sind f, g ∈ L p (µ), so gilt
f + g ≤ f + g .
p
p
p
Analysis 3
52
Beweis. (a) Für 1 < p < ∞ ist dies die Hölder-Ungleichung für | f | und |g|.
Für p = ∞ beachte, dass für fast alle x die Ungleichung
| f (x)g(x)| ≤ f ∞ |g(x)|
gilt. Durch Integration folgt die Behauptung.
(b) Für 1 < p < ∞ folgt dies aus der Minkowski-Ungleichung, sonst ist
die Aussage trivial.
Ist f ∈ L p (µ) und α ∈ C, so gilt
α f = |α| f ,
p
p
also ist α f wieder in L p (µ), damit ist L p (µ) ein komplexer Vektorraum.
Definition 3.2.3. Sei 1 ≤ p ≤ ∞ und sei N der Raum der
Nullfunktionen. Offensichtlich gilt N ⊂ L p (µ). Sei Lp (µ) der
Quotientenraum
Lp (µ) B L p (µ)/N .
Anders gesagt, ist
Lp (µ) = L p (µ)/ ∼,
wobei ∼ die Äquivalenzrelation
f ∼g
bezeichnet.
⇔
f (x) = g(x) fast überall in x
Analysis 3
53
Satz 3.2.4 (Satz von Riesz-Fischer). Sei 1 ≤ p ≤ ∞. Dann ist Lp (µ) mit
||·||p ein normierter Vektorraum. Dieser ist vollständig, d.h., ein
Banach-Raum.
Beweis. Jetzt sieht man auch den Grund, weshalb die Nullfunktionen
herausgeteilt werden mussten, denn auf dem Raum der Nullfunktionen
ist die p-Norm gleich Null. Andererseits ist für f ∈ L p (µ),
f = 0
p
f ∈N.
⇔
Daher ist die p-Norm auf Lp (µ) in der Tat definit. Die Vollständigkeit
muss noch gezeigt werden. Sei also fn eine Cauchy-Folge in Lp (µ). Es ist
zu zeigen, dass sie konvergiert. Es existiert eine Teilfolge ( fnk ) so dass
für k ∈ N die Ungleichung fnk+1 − fnk < 21k gilt. Setze
p
gk =
k
X
g=
| fn j+1 − fn j |,
j=1
∞
X
| fn j+1 − fn j |.
j=1
Es folgt, gk p < 1 für jedes k ∈ N. Aus der Tatsache, dass die Norm
eines normierten Vektorraums eine stetige Abbildung ist, folgert man
g ≤ 1. Insbesondere ist g(x) < ∞ fast überall, so dass die Reihe
p
f (x) = fn1 (x) +
∞ X
fn j+1 (x) − fn j (x)
j=1
für fast alle x ∈ X absolut konvergiert. In den Punkten, in denen die
Reihe nicht absolut konvergiert, setzt man f (x) = 0. Es folgt
f (x) = lim fn j (x)
j→∞
f.ü.
Analysis 3
54
Wegen f p ≤ fn1 p + gp < ∞ ist f ∈ Lp (µ) und nach Definiton
konvergiert fnk in der p-Norm gegen f . Wenn allerdings eine Teilfolge
einer Cauchy-Folge konvergiert, so konvergiert die ursprüngliche Folge
auch, damit ist Lp (µ) vollständig.
Der Beweis enthält ein Teilresultat, das wichtig genug ist, separat
erwähnt zu werden
Satz 3.2.5. Ist 1 ≤ p ≤ ∞ und fn eine Cauchy-Folge in Lp (µ) mit Limes f ,
dann besitzt ( fn ) eine fast überall gegen f konvergente Teilfolge.
Proposition 3.2.6. Sei µ ein endliches Maß. Für 1 ≤ p ≤ q ≤ ∞ ist
Lq (µ) ⊂ Lp (µ).
· wobei | f | ≤ 1 in
Beweis. Sei zunächst q < ∞. Sei f ∈ Lq (µ). Sei X = A∪B,
A gilt, sowie | f | > 1 in B. In B gilt dann insbesondere | f |p < | f |q . Daher
folgt
Z
Z
| f |q dµ < ∞.
p
| f | dµ ≤
B
Ferner ist
B
Z
Z
1 dµ = µ(A) < ∞.
| f |p dµ ≤
A
A
Zusammen folgt: f ∈ Lp (µ).
Schließlich betrachte den Fall p < q = ∞. Da | f | ≤ f ∞ auf dem
Komplement einer Nullmenge gilt, folgt
Z
Z p
p
p
f ∞ dµ = µ(X) f ∞ < ∞.
| f | dµ ≤
X
Beispiele 3.2.7.
X
• Betrachte den Maßraum R mit dem
Analysis 3
55
Lebesgue-Maß. Für s > 0 sei
−s
x
fs (x) =
0
x ≥ 1,
x < 1.
Dann gilt
fs ∈ L1 (λ)
⇔
s > 1.
Für 1 ≤ p < ∞ gilt | fs |p = fps . Da ferner gilt f ∈ Lp ⇔ | f |p ∈ L1 , folgt
fs ∈ Lp
• Für s > 0 sei
⇔
fps ∈ L1
−s
x
gs (x) =
o
⇔
1
p> .
s
0 < x < 1,
sonst.
Es gilt dann
gs ∈ L1 (λ)
⇔
s < 1.
↔
1
p< .
s
Analog zum ersten Beispiel gilt
gs ∈ Lp (λ)
Sind 1 < p , q < ∞, so kann man mit diesen Beispielen Funktionen
basteln, die in Lp , aber nicht in Lq liegen und umgekehrt. Beachtet
man ferner, dass gs nie in L∞ liegt, fs aber immer, kann man dies
auf 1 ≤ p , q ≤ ∞ ausdehnen.
3.3
Hilbert-Räume
Erinnerung: Ein normierter Vektorraum über C ist ein komplexer
Vektorraum V mit einer Abbildung ||·|| : V → [0, ∞) so dass für v, w ∈ V
und λ ∈ R gilt:
Analysis 3
56
• ||v|| = 0 ⇔ v = 0
(Definitheit)
• ||λv|| = |λ| ||v||
(Multiplikativität)
• ||v + w|| ≤ ||v|| + ||w||
(Dreiecksungleichung).
Mit der Metrik
d(x, y) = x − y
wird V dann ein metrischer Raum. Ein normierter Raum, der
vollständig ist, heisst Banach-Raum.
Beispiele 3.3.1.
• Ist X ein metrischer Raum, dann ist der
Vektorraum Cb (X) aller beschränkten stetigen Funktionen
f : X → C ein Banach-Raum mit der Norm
f = sup | f (x)|.
X
x∈X
Beweis. Die Normeigenschaften sind trivial. Es ist Vollständigkeit
zu zeigen. Sei also ( fn ) eine Cauchy-Folge. Dann gilt für jedes x ∈ X,
| fn (x) − fm (x)| ≤ sup | fn (y) − fm (y)| = fn − fm X .
y∈X
Also ist ( fn (x))n∈N eine Cauchy-Folge in C, konvergiert also.
Nennen wir den Limes f (x). Sei ε > 0, dann gibt es n0 so dass für
alle n, m ≥ n0 und alle x ∈ X gilt
| fn (x) − fm (x)| < ε.
Mit m → ∞ folgt, dass für jedes n ≥ n0 und jedes x ∈ X gilt
| fn (x) − f (x)| ≤ ε.
Das bedeutet aber, dass fn gleichmässig gegen f konvergiert.
Analysis 3
57
Damit ist f stetig. Es ist leicht einzusehen, dass f auch beschränkt
ist, also f ∈ Cb (X), womit die Vollständigkeit gezeigt wäre.
• Für jedes 1 ≤ p ≤ ∞ und jeden Maßraum (X, A , µ) ist Lp (µ) ein
Banach-Raum.
Definition 3.3.2. Für lineare Abbildung T : V → W zwischen
normierten Räumen sei
||T||op = sup ||T(v)|| ∈ [0, ∞]
||v||=1
die Operatornorm. Die Abbildung T heisst beschränkte lineare
Abbildung, falls ||T||op < ∞.
Man spricht statt von einer linearen Abbildung auch von einem
linearen Operator. Ist der Zielraum W gleich C, so spricht man auch
von einem linearen Funktional.
Satz 3.3.3. Für jeden linearen Operator T : V → W zwischen normierten
Räumen und jedes v ∈ V gilt
||T(v)|| ≤ ||T||op ||v|| .
Ein linearer Operator T ist genau dann stetig, wenn er beschränkt ist.
Beweis. Die Abschätzung ist trivialerweise erfüllt, wenn v = 0 ist. Ist
1
v , 0, ist auch ||v|| , 0 und man kann schreiben v = ||v|| ||v||
v. Der Vektor
1
v
||v||
hat Norm 1 und daher ist
v v = ||v|| T
≤ ||v|| ||T||op .
||T(v)|| = T ||v||
||v||
||v|| Analysis 3
58
Wir zeigen zunächst, dass eine lineare Abbildung T : V → W zwischen
normierten Räumen genau dann stetig ist, wenn sie im Nullpunkt
stetig ist. Ist T stetig, dann ist T stetig in Null. Sei umgekehrt T linear
und stetig in Null. Sei vn → v eine in V konvergente Folge, dann
konvergiert vn − v gegen Null, also konvergiert auch
T(vn ) − T(v) = T(vn − v) gegen Null, d.h. T(vn ) geht gegen T(v), somit ist
T in v stetig und da v beliebig ist, ist T schlechthin stetig.
Wir zeigen, dass ein stetiger Operator beschränkt ist. Sei also T stetig
und nimm an, er ist nicht beschränkt. Dann existiert eine Folge v j von
Vektoren mit v j = 1 und T(v j ) → ∞. Nehmen wir an, dass
T(v j ) , 0 für alle j, dann geht die Folge 1 v j gegen Null, also folgt
||T(v j )||
1
1
T(v j ) = T v j → 0.
T(v j )
T(v j )
Diese Vektoren haben aber Norm 1, Widerspruch! Sei umgekehrt T
beschränkt und v j eine Nullfolge, das heisst, dass v j gegen Null geht.
Dann gilt
T(v j ) ≤ ||T||op v j → 0.
Also geht T(v j ) gegen Null, T ist also stetig in Null, also stetig.
Erinnerung: Ein Skalarprodukt auf einem komplexen Vektorraum V
ist eine Abbildung
h·, ·i : V × V → C
mit folgenden Eigenschaften:
• Für w ∈ V ist die Abbildung V → C; v 7→ hv, wi linear.
• Es gilt hw, vi = hv, wi für alle v, w ∈ V.
• Für v ∈ V ist hv, vi ≥ 0 und hv, vi = 0 ⇔ v = 0.
Analysis 3
59
Definition 3.3.4. Ein komplexer Vektorraum V mit einem
Skalarprodukt h., .i heisst Prä-Hilbert-Raum.
Das einfachste Beispiel nach dem Nullraum ist V = C mit α, β = αβ̄.
Oder allgemeiner V = Ck mit k ∈ N und
hv, wi = vt w̄,
Die Norm auf einem Prä-Hilbert-Raum V ist definiert durch
||v|| =
p
hv, vi,
v ∈ V.
In der linearen Algebra wird bewiesen, dass dies in der Tat eine Norm
ist. Ausserdem wird dort die Cauchy-Schwarz-Ungleichung
| hv, wi | ≤ ||v|| ||w||
∀v,w∈V
bewiesen.
Lemma 3.3.5. Das Skalarprodukt ist eine stetige Abbildung V × V → C.
Beweis. Beweis seien v j → v und w j → w konvergente Folgen in V.
Dann ist nach der Cauchy-Schwarz-Ungleichung
D
D
E
E D
E D
E
v j , w j − hv, wi ≤ v j , w j − v, w j + v, w j − hv, wi
D
E D
E
= v j − v, w j + v, w j − w ≤ v j − v w j + ||v|| w j − w .
| {z }
| {z } |{z}
→0
beschränkt
→0
Definition 3.3.6. Ein Hilbert-Raum ist ein Prä-Hilbert-Raum, der
vollständig bzgl der induzierten Norm ist.
Proposition 3.3.7. Jeder endlich-dimensionale Prä-Hilbert-Raum ist
vollständig.
Analysis 3
60
Beweis. In der Linearen Algebra wird gezeigt, dass jeder
endlich-dimensionale Prä-Hilbert-Raum zu Cn isomorph ist, wobei n
die Dimension ist. Dieser Raum ist vollständig.
Beispiel 3.3.8. Ist (X, A , µ) ein Maßraum, so ist L2 (µ) ein Hilbert-Raum
mit dem Skalarprodukt
Z
f, g =
f (x)g(x) dµ(x).
X
Von besonderem Interesse sind die sogenannten `2 -Räume. Sei S
irgendeine Menge und ζ das Zählmaß auf P(S). Dann sei `2 (S) = L2 (ζ),
also ist `2 (S) die Menge aller Abbildungen f : S → C so dass
X
| f (s)|2 < ∞.
s∈S
Hierbei ist die Summe zu verstehen als
X
| f (s)| = sup
2
X
| f (s)|2 .
E⊂S s∈E
endlich
s∈S
Lemma 3.3.9. Sei S eine beliebige Menge und sei φ : S → [0, ∞) eine
Funktion. Dann ist die Aussage
X
φ(s) < ∞
s∈S
genau dann erfüllt, wenn die Menge S,0 = {s ∈ S : φ(s) , 0} abzählbar ist und
P ,0 |
es gilt |Sj=1
φ(s j ) < ∞ für eine (und damit jede) Abzählung (s j ) von S,0 .
Beweis. Es gelte C =
P
s∈S φ(s)
< ∞. Für n ∈ N sei Sn die Menge aller
s ∈ S mit φ(s) > n1 . Sei E eine endliche Teilmenge von Sn . Dann gilt
|E| = n
X1
s∈E
n
<n
X
s∈En
φ(s) ≤ n
X
s∈S
φ(s) = nC.
Analysis 3
61
Da dies für jede endliche Teilmenge gilt, ist Sn selbst endlich mit
S
|Sn | < nC. Daher ist S,0 = ∞
n=1 Sn eine abzählbare Vereinigung endlicher
Mengen, also abzählbar. Sei nun N ∈ N0 ∪ {ℵ0 } die Mächtigkeit von S,0
und sei (sn ) eine Abzählung von S,0 . Dann gilt für jedes endliche m ≤ N,
m
X
φ(sn ) ≤
n=1
X
φ(s) = C.
s∈S
Im Grenzübergang folgt
N
X
φ(sn ) ≤ C < ∞.
n=1
Die Umkehrung ist trivial.
Definition 3.3.10. Ein Orthonormalsystem oder ONS in einem
Hilbert-Raum V ist eine Familie von Vektoren (ei )i∈I für die gilt
D
E
1 falls i = j,
ei , e j =
0 sonst.
Ein Orthonormalsystem (ei )i∈I heisst vollständiges ONS, oder
Orthonormalbasis ONB, falls der Orthogonalraum der ei aufgespannte
Untervektorraum dicht liegt in V.
Analysis 3
62
Satz 3.3.11. Jeder Hilbert-Raum hat eine Orthonormalbasis. Für jede ONB
(ei )i∈I und jeden Vektor v ∈ V gilt: Ist
ci (v) = hv, ei i ,
so sind nur abzählbar viele dieser Koeffizienten ungleich Null und die Reihe
X
ci (v)ei
i∈I
konvergiert in jeder Reihenfolge gegen v. Es gilt
X
|ci (v)|2 = ||v||2 .
i∈I
Beweis. Mit dem Lemma von Zorn beschafft man sich ein maximales
ONS (ei )i∈I . Dessen Orthogonalraum
(ei )⊥
i∈I = {v ∈ V : hv, ei i = 0 ∀i∈I }
muss Null sein, denn ist u , 0 im Orthogonalraum, dann ist f = u/ ||u||
ein neuer Vektor, um den man das ONS erweitern kann, was der
Maximalität widerspricht. Sei also (ei )i∈I ein ONS mit trivialem
Orthogonalraum und sei v ∈ V. Für eine endliche Teilmenge E ⊂ I setze
vE =
X
ci (v)ei .
i∈E
Dann gilt
hvE , vi = hvE , vE i =
X
i∈E
|ci (v)|2 ,
Analysis 3
63
wie man leicht sieht. Also ist
||v − vE ||2 = hv − vE , v − vE i
= ||v||2 − hv, vE i − hvE , vi + hvE , vE i
X
2
= ||v|| −
|ci (v)|2 .
i∈E
Da dies ≥ 0 ist, folgt
X
|ci (v)|2 ≤ ||v||2 .
i∈E
Also
X
|ci (v)|2 ≤ ||v||2 .
i∈I
Damit folgt, dass nur abzählbar viele ci (v) ungleich Null sind und dass
die Reihe der |ci (v)|2 konvergiert. Wir wollen zeigen, dass die Reihe
P
i∈I ci (v)ei in jeder Reihenfolge konvergiert. Sei also c1 , c2 , . . . eine
Nummerierung der Koeffizienten , 0, so gilt für n ≤ m in N,
2
m
m
X
X
ci (v)ei =
|ci (v)|2 ,
n=n
i=n
woraus folgt, dass
Pn
i=1 ci (v)ei
eine Cauchy-Folge in V ist, also
konvergiert. Wir zeigen, dass der Limes gleich v ist. Für j ∈ I rechne
+
*
X
D
E
e j, v −
ci (v)ei = e j , v − c j (v) = 0.
i∈I
Also ist der Vektor v −
P
i∈I ci (v)ei
im Orthogonalraum des ONS, also
gleich Null, die Summe konvergiert also in der Tat gegen v.
Insbesondere ist der von (ei ) aufgespannte Unterraum dicht. Es folgt
*X
+ X
X
ci (v)ei ,
ci (v)ei =
|ci (v)|2 .
||v||2 =
i∈I
i∈I
i∈I
Analysis 3
64
Satz 3.3.12. (a) Sei V ein Hilbert-Raum und U ein abgeschlossener
Unterraum. Dann gilt
V = U ⊕ U⊥ ,
wobei
U⊥ = {v ∈ V : hv, Ui = 0}
der Orthogonalraum zu U ist.
(b) Sei V ein Hilbert-Raum und sei L : V → C ein stetiges lineares
Funktional. Dann existiert ein eindeutig bestimmter Vektor w ∈ V mit
L(v) = hv, wi
für jeden Vektor v ∈ V.
Beweis. (a) Wie in der Linearen Algebra sieht man U ∩ U⊥ = 0. Da U ein
abgeschlossener Unterraum ist, ist U selbst wieder ein Hilbert-Raum.
Sei (ei ) eine ONB von U und setze für v ∈ V:
P(v) =
X
hv, ei i ei .
i∈I
Dann ist P : V → U eine lineare Abbildung mit P(u) = u falls u ∈ U, also
P2 = P. Der Kern von P ist U⊥ . Sei v ∈ V, dann ist v − P(v) ∈ ker P = U⊥ ,
also folgt V = U ⊕ U⊥ .
(b) Sei L : V → C ein stetiges lineares Funktional. Ist L = 0, so folgt
w = 0. Ist L , 0, dann ist U = ker(L) ein abgeschlossener Unterraum von
V. Daher ist V = U ⊕ U⊥ und da U , V, ist U⊥ , 0. Sei also w0 ∈ U⊥ mit
Analysis 3
65
||w0 || = 1. Dann ist L(w0 ) = c , 0. Setze w = cw0 . Dann ist
L(w0 ) = c = hw0 , wi .
Da L einen Isomorphismus U⊥ → C induziert, ist U⊥ = Cw0 , also
insbesondere ist jedes v ∈ V von der Form v = αw0 + u mit u ∈ U. Daher
ist
L(v) = αc = α hw0 , wi = hv, wi .
Dies zeigt die Existenz. Für die Eindeutigkeit nimm an, es gebe einen
weiteren Vektor w0 mit L(v) = hv, w0 i. Dann gilt für jedes v ∈ V, dass
0 = hv, w − w0 i. Insbesondere für v = w − w0 folgt w − w0 = 0.
3.4
Der Satz von Lebsgue-Radon-Nikodym
Der Satz von Lebesgue-Radon-Nikodym gibt ein Kriterium an, wann
ein Maß durch Integration aus einem anderen entsteht.
Definition 3.4.1. Sei (X, A ) ein Messraum und seien µ, η Maße auf A .
Man sagt, dass η absolut stetig bezüglich µ ist und schreibt
η µ,
falls jede µ-Nullmenge auch eine η-Nullmenge ist, wenn also gilt
µ(A) = 0
⇒
η(A) = 0.
Ferner schreibt man für Maße τ, µ:
τ ⊥ µ,
· in messbare Mengen gibt, so
falls es eine disjunkte Zerlegung X = A∪B
Analysis 3
66
dass
µ(B) = 0
und τ(A) = 0.
• Sei δ das Dirac-Maß in Null auf R, also
1 falls 0 ∈ E,
δ(E) =
0 falls 0 < E.
Beispiele 3.4.2.
Dann gilt δ ⊥ λ, wobei λ das Lebesgue-Maß ist.
• Ist (X, A , µ) ein Maßraum und φ : X → [0, ∞] messbar, so definiert
man ein Maß
Z
η(E) =
φ dµ.
E
Dann gilt η µ.
Definition 3.4.3. Ein Maß µ auf X heißt σ-endlich, falls es messbare
Mengen E1 , E2 , . . . gibt, so dass
X=
∞
[
Ej
und
µ(E j ) < ∞ für jedes j.
j=1
Satz 3.4.4 (Lebesgue-Radon-Nikodym). Sei (X, A ) ein Messraum und
µ, η zwei σ-endliche Maße. Dann gibt es eindeutig bestimmte Maße ηa und
ηs auf X, so dass
η = ηa + ηs ,
ηa µ,
ηs ⊥ µ.
Das Maß ηs heißt µ-singulärer Teil von η. Es gibt ein messbare Funktion
h : X → [0, ∞] so dass für jedes messbare E ⊂ X gilt
Z
ηa (E) =
h dµ.
E
Analysis 3
67
Die Funktion h ist bis auf die Addition einer µ-Nullfunktion eindeutig
bestimmt.
Definition 3.4.5. Die Zerlegung η = ηa + ηs heißt Lebesgue-Zerlegung
von η. Die Funktion h heißt Radon-Nikodym-Dichte von ηa bezüglich
µ. Man schreibt
dηa = h dµ
oder h =
dηa
.
dµ
Korollar 3.4.6. Aus dem Satz folgt insbesondere: Gilt für σ-endliche Maße:
η µ, so hat η eine Radon-Nikodym Dichte bezüglich µ.
Beweis. Die Eindeutigkeit von h folgt aus Satz 2.2.9. Für die
Eindeutigkeit der Zerlegung seien zwei solcher Zerlegungen gegeben:
η = ηa + ηs = η0a + η0s .
Es gibt µ-Nullmengen N und N0 mit ηs (Nc ) = 0 = η0s ((N0 )c ). Man kann
beide durch N ∪ N0 ersetzen und kann also annehmen, das es eine
µ-Nullmenge N gibt, so dass ηs (Nc ) = η0s (Nc ) = 0. Für eine beliebige
messbare Teilmenge A folgt µ(A ∩ N) = 0, also auch
ηa (A ∩ N) = 0 = η0a (A ∩ N). Damit folgt
ηs (A) = ηs (A ∩ N) = η(A ∩ N) = η0s (A ∩ N) = η0s (A)
und
ηa (A) = ηa (A ∩ Nc ) = η(A ∩ Nc ) = η0a (A ∩ Nc ) = η0a (A).
Also ist die Zerlegung eindeutig.
Da η und µ beide σ-endlich sind, kann man X in abzählbar viele
Teilmengen zerlegen auf deren jeder η und µ endlich sind. Hat man die
Behauptung auf diesen Teilen, setzt man alles wieder fein zusammen,
Analysis 3
68
so dass man im Endeffekt den Satz nur unter der Voraussetzung, dass η
und µ endlich sind, zu beweisen braucht.
Seien also η und µ endlich. Sei τ = η + µ. Für f ∈ L2 (τ) liefert die
Hoelder-Ungleichung
!1/2
Z
Z
Z
Z
(τ(X))1/2 .
f dη ≤
| f | dη ≤
| f | dτ ≤
| f |2 dτ
X
X
X
Daher ist die Abbildung f 7→
R
X
X
f dη ein beschränktes lineares
Funktional auf L2 (τ). Es gibt also eine Funktion h ∈ L2 (τ) mit
Z
D E Z
f h dτ.
f dη = f, h =
X
X
Für eine messbare Menge E ⊂ X folgt durch Einsetzen von f = 1E , dass
R
R
1
h dτ ≤ 1. Damit gilt τ-fast
η(E) = E h dτ. Da η(E) ≤ τ(E) folgt 0 ≤ τ(E)
E
überall 0 ≤ h ≤ 1, so dass 0 ≤ h(x) ≤ 1 für jedes x ∈ X angenommen
werden kann. Es gilt also
Z
Z
Z
f dη =
f h dη +
f h dµ,
X
oder
X
X
Z
Z
f (1 − h) dη =
X
f h dµ.
X
Seien
A = {x ∈ X : h(x) < 1}
und
B = {x ∈ X : h(x) = 1}.
Definiere
ηa (E) = η(E ∩ A)
und ηs (E) = η(E ∩ B)
für jedes messbare E ⊂ X. Dann ist η = ηa + ηs . Für E ⊂ A setze f =
1E
1−h .
Analysis 3
69
Dann folgt
Z
Z
f (1 − h) dη =
ηa (E) = η(E) =
X
Damit ist ηa µ und ηa hat die Dichte
h
1−h
h
dµ.
E 1−h
bezüglich µ. Weiter setze
f = 1B und erhalte
Z
Z
Z
B
dµ = µ(B),
h dµ =
(1 − h) dη =
0=
B
B
wobei h ≡ 1 auf B ausgenutzt wurde. Also ist B eine µ-Nullmenge.
Ferner ist A eine ηs -Nullmenge, also folgt ηs ⊥ µ.
Beispiel 3.4.7. Das folgende Beispiel zeigt, dass die σ-Endlichkeit im
Satz von Radon-Nikodym eine unverzichtbare Voraussetzung ist: Sei µ
das Zählmaß auf R und λ das Lebesgue-Maß. Dann gilt λ µ, aber λ
hat keine Dichte bezüglich µ.
Analysis 3
4
70
Produktintegral
4.1
Vorbemerkungen
Sei X eine Menge. Ein Mengensystem E ⊂ P(X) heißt schnittstabil,
wenn
A, B ∈ E
⇒
A∩B ∈ E.
Satz 4.1.1. Sei E ⊂ P(X) schnittstabil und sei A (E ) die von E erzeugte
σ-Algebra. Sei D ⊂ P(X) ein Mengensystem mit E ⊂ D ⊂ A (E ) und
a) ∅ ∈ D,
b) M ∈ D ⇒ Mc ∈ D,
c) M1 , M2 , · · · ∈ D disjunkt ⇒ M =
S
n Mn
∈ D.
Dann gilt D = A (E ).
Beweis. Eine Teilmenge D ⊂ P(X), die (a), (b) und (c) aus dem Lemma
erfüllt, heißt Dynkin-System.
Lemma 4.1.2.
a) Ist D ein Dynkin-System und A, B ∈ D, mit B ⊂ A, so
liegt auch die Differenz A r B in D.
b) Ein schnittstabiles Dynkin-System ist eine σ-Algebra.
· c.
Beweis. (a) Es ist A r B = (Ac ∪B)
(b) Sei D ein schnittstabiles Dynkin-System. Sind A, B ∈ D, so auch
· in D. Seien nun
A r B = A ∩ Bc ∈ D. Damit liegt auch A ∪ B = (A r B)∪B
Analysis 3
71
M1 , M2 , · · · ∈ D nicht notwendig disjunkt. Dann ist
Nn = Mn r (Mn−1 ∪ · · · ∪ M1 ) ∈ D
und es ist
S
S
· N j ∈ D.
M
=
j
j
j
Ebenso wie bei σ-Algebren gilt, dass zu einer beliebigen Teilmenge
E ⊂ P(X) die Menge
D(E ) =
\
D
D⊃E
D ist Dynkin-System
ein Dynkin-System ist. Es ist das kleinste Dynkin-System, das E enthält,
man nennt es das von E erzeugte Dynkin-System.
Lemma 4.1.3. Ist E ⊂ P(X) schnittstabil, so ist das von E erzeugte
Dynkin-System gleich der von E erzeugten σ-Algebra.
Beweis. Nach dem letzten Lemma reicht es, zu zeigen, dass das von E
erzeugte Dynkin-System D schnittstabil ist. Für D ∈ D sei
Q(D) = {M ⊂ X : M ∩ D ∈ D}.
Dann ist Q(D) wieder ein Dynkin-System, denn für M ∈ Q(D) ist
Mc ∩ D = D r (M ∩ D) ∈ D nach Lemma 4.1.2. Für jedes E ∈ E ist
E ⊂ Q(E), denn E ist schittstabil. Daher ist jedes D ∈ D schon in Q(E),
damit aber auch E ∈ Q(D)! Daher ist auch D ⊂ Q(D), also ist D
schnittstabil.
Nun folgt der Satz, denn in der Situation des Satzes gilt
E ⊂ D(E ) ⊂ D ⊂ A (E )
=
|{z}
nach Lemma 4.1.3
D(E ),
Analysis 3
72
also folgt D = A (E ).
4.2
Produktmaße
Es wird ein kanonische Weg vorgestellt, wie man aus Maßen auf X und
Y ein Maß auf dem Produkt X × Y konstruiert.
Im folgenden seien (X, A , µ) und (Y, B, ν) Maßräume. Sei A ⊗ B die
σ-Algebra auf X × Y erzeugt von den messbaren Rechtecken:
A × B,
A ∈ A , B ∈ B.
Definition 4.2.1. Sei X eine Menge. Eine Teilmenge E ⊂ P(X) heisst
Komplement-abgeschlossen, falls aus A ∈ E folgt, dass Ac ∈ E ist.
Lemma 4.2.2.
a) Sind E und F Komplement-abgeschlossene Erzeuger der
σ-Algebren A und B, so wird die Produkt-σ-Algebra von allen Mengen
der Form E × F mit E ∈ E und F ∈ F erzeugt.
b) Sind X, Y topologische Räume, versehen mit den Borel-σ-Algebren und
ist jede offene Menge U ⊂ X × Y eine abzählbare Vereinigung offener
Rechtecke, dann ist die Produkt-σ-Algebra auf X × Y gleich der
Borel-σ-Algebra bezüglich der Produkttopologie.
Insbesondere folgt, dass die Produkt-σ-Algebra auf Rn = R × · · · × R
gleich der Borel-σ-Algebra von Rn ist.
Beweis. (a) Aus E × F ⊂ A × B folgt sofort
A (E × F ) ⊂ A (A × B) = A ⊗ B.
Für die umgekehrte Inklusion wird zunächst
A (E × F ) = A (E × B)
Analysis 3
73
gezeigt. Hierzu sei B ∈ B und E ∈ E . Es ist zu zeigen:
E × B ∈ A (E × F ). Wir machen uns klar, dass die Menge
n
o
S := Q ⊂ Y : E × Q, Ec × Q ∈ A (E × F )
eine σ-Algebra ist. Abzaehlbare Vereinigungen sind klar. Fuer die
Komplement-Abgeschlossenheit sei Q ∈ S , so ist
E × Qc = (Ec × Q)c ∩ E × X
und damit ist Qc ∈ S .
Nun ist klar, dass S die Menge F umfasst, also umfasst sie B und B
liegt in ihr, was zu beweisen war. Aus Symmetriegründen folgt nun
auch A (E × B) = A (A × B).
(b) Nach Teil (a) ist die Produkt-σ-Algebra von den Rechtecken der
Form A × B erzeugt, wobei A und B offen oder abgeschlossen sind. Sind
beide offen oder beide abgeschlossen, so ist auch A × B offen oder
abgeschlossen, liegt also in der Borel-σ-Algebra von X × Y. Ist hingegen
etwa A abgeschlossen und B offen, dann ist
A × B = X × B r Ac × B
eine Differenz offener Mengen, liegt also auch in der Borel-σ-Algebra
des Produktes X × Y. Da schliesslich eine gegebene offene Menge in
X × Y eine abzählbare Vereinigung offener Rechtecke ist, liegt sie schon
in der Produkt-σ-Algebra, die damit gleich der Borel-σ-Algebra ist.
Lemma 4.2.3. Eine Abbildung f : Z → X × Y von einem Messraum Z ist
genau dann messbar, wenn beide Projektionen
f1 = Pr1 ◦ f : Z → X,
f2 = Pr2 ◦ f : Z → Y
Analysis 3
74
messbar sind.
Beweis. Ist f messbar, so sind f1 und f2 als Kompositionen messbarer
Abbildungen messbar. Seien andersherum f1 und f2 messbar und sei
A × B ein messbares Rechteck in X × Y. Dann ist
f −1 (A × B) = f1−1 (A) ∩ f2−1 (B)
messbar. Da die messbaren Rechtecke die σ-Algebra erzeugen, ist f
messbar.
Satz 4.2.4. Sind µ und µ beide σ-endlich, so gibt es ein eindeutig
bestimmtes Maß µ ⊗ ν auf der σ-Algebra A ⊗ B mit
µ ⊗ ν(A × B) = µ(A)ν(B).
Das Maß µ ⊗ ν wird das Produktmaß genannt.
Beweis. Das in Frage stehende Maß wird wie folgt durch ein äußeres
Maß gegeben. Sei die Abbildung η : P(X × Y) → [0, ∞] durch
∞
X
[
η(S) B inf
µ(A
)ν(B
)
:
S
⊂
A
×
B
j
j
j
j
j=1
j
definiert, wobei das Infimum über alle Folgen messbarer Rechtecke
A j × B j läuft.
Lemma 4.2.5. η ist ein äußeres Maß, also
a) η(∅) = 0,
b) A ⊂ B
⇒
η(A) ≤ η(B),
Analysis 3
c) η
S
75
∞
j=1 E j
≤
P
j η(E j ).
Beweis. Der Beweis läuft genauso wie bei den Intervallen in Proposition
1.4.2.
Um die Existenz des Produktmaßes sicherzustellen, ist zu zeigen dass
alle messbaren Rechtecke schon η-messbar sind und dass η die
Produkteigenschaft
η(A × B) = µ(A)ν(B),
A ∈ A , B ∈ B,
hat. Sei also R = A × B ein messbares Rechteck und sei Q ⊂ X × Y. Es ist
zu zeigen
η(Q ∩ R) + η(Q ∩ Rc ) ≤ η(Q).
Sei Q ⊂
S
j Rj
=
S
j Aj
× B j eine abzählbare Überdeckung durch
messbare Rechtecke. Definitionsgemäß ist η(Q) gleich dem Infimum
über alle Ausdrücke der Form
X
µ(A j )ν(B j ) =
X
+
X
+
X
+
X
µ(A j ∩ A)ν(B j ∩ B)
j
j
µ(A j ∩ A)ν(B j ∩ Bc )
j
µ(A j ∩ Ac )ν(B j ∩ B)
j
µ(A j ∩ Ac )ν(B j ∩ Bc ).
j
Die erste Summe entspricht der Überdeckung von Q ∩ R durch die
Rechtecke R j ∩ R. Die weiteren drei Summen entsprechen der
Überdeckung von Q ∩ Rc durch die Rechtecke (A j ∩ A) × (B j ∩ Bc ), sowie
(A j ∩ Ac ) × (b j ∩ B) und (A j ∩ Ac ) × (B j ∩ Bc ), so dass man durch
Analysis 3
76
Infimumsbildung zu
η(Q) ≥ η(Q ∩ R) + η(Q ∩ Rc )
gelangt. Also ist jedes messbare Rechteck auch η-messbar. Die
Produkteigenschaft ist klar, da man das Rechtecke einfach durch sich
selbst überdecken kann.
Nun zur Eindeutigkeit. Sei π ein weiteres Maß auf A ⊗ B, das die
Produkteigenschaft
π(A × B) = µ(A)ν(B)
für messbare Rechtecke hat. Ist E ⊂ X × Y messbar und ist
S
E ⊂ j A j × B j eine Überdeckung durch Rechtecke, dann gilt
π(E) ≤
X
j
π(A j × B j ) =
X
µ(A j )ν(B j ).
j
S
Damit folgt π ≤ η. Sei nun X = n Xn mit Xn ⊂ Xn+1 und µ(Xn ) < ∞,
S
sowie Y = n Yn mit Yn ⊂ Yn+1 und ν(Yn ) < ∞. Setze Rn = Xn × Yn . Sei
E ⊂ X × Y messbar, und sei En = E ∩ Rn , dann folgt
π(En ) = π(Rn )−π(Rn rEn ) = η(Rn )−π(Rn rEn ) ≥ η(Rn ) = η(Rn rEn ) = η(En )
und damit π(E) = limn π(En ) ≥ limn η(En ) = η(E).
Korollar 4.2.6. Sind die Maße nicht beide σ-endlich, so gibt es immer noch ein
Maß π auf A ⊗ B mit der Produkteigenschaft
π(A × B) = µ(A)ν(B),
aber dieses ist nicht notwendig eindeutig. Unter allen Maßen mit der
Produkteigenschaft gibt es jedoch ein größtes, das das Produktmaß µ ⊗ ν
genannt wird.
Analysis 3
77
Beweis. Folgt aus dem Beweis des Satzes.
Beispiel 4.2.7. Das Lebesgue-Maß λn auf Rn ist das n-fache
Produktmaß des Lebesgue-Maßes λ auf R. Dies ergibt sich aus der
Eindeutigkeit des Produktmaßes.
4.3
Der Satz von Fubini
Seien (X, A , µ) und (Y, B, ν) Maßräume. Der Satz von Fubini sagt, dass
man über X × Y integrieren kann, indem man zuerst über X und dann
über Y integriert, oder umgekehrt. Man muss allerdings verlangen,
dass die Maße σ-endlich sind.
Satz 4.3.1 (Fubini). Seien µ und ν beide σ-endlich und sei f eine messbare
Funktion auf dem Produkt X × Y.
R
a) Ist f ≥ 0, dann definieren die partiellen Integrale X f (x, y) dx und
R
f (x, y) dy messbare Funktionen und die Fubini-Formel
Y
Z
Z Z
f (x, y)dµ ⊗ ν(x, y) =
X×Y
f (x, y) dy dx
ZX Z Y
=
f (x, y) dx dy
Y
X
gilt.
b) Ist f komplexwertig und eines der iterierten Integrale
Z Z
Z Z
| f (x, y)| dy dx oder
| f (x, y)| dx dy
X
Y
Y
X
ist endlich, dann ist f integrierbar. Ist f integrierbar, so existieren
auch die iterierten Integrale und die Fubini-Formel gilt.
Analysis 3
78
Beweis. Man zerlegt X =
S
n Xn
in disjunkte Teile von endlichem Maß
und verfährt ebenso mit Y. Ist die Behauptung für jede Menge der
Gestalt Xn × Ym gezeigt, folgt sie allgemein. Man kann also annehmen,
dass beide Maße endlich sind, nach Skalieren kann man sogar
µ(X) = ν(Y) = 1 annehmen.
Lemma 4.3.2. Ist M ⊂ X × Y messbar, so ist für jedes y ∈ Y die Menge
M y = {x ∈ X : (x, y) ∈ M} messbar in X. Die Abbildung y 7→ µ(M y ) ist
messbar auf Y und es gilt
Z
µ ⊗ ν(M) =
µ(M y ) dν(y).
Y
M
y
My
Beweis. Nach Lemma 4.2.3 ist die Abbildung X → X × Y, x 7→ (x, y)
messbar. Damit ist das Urbild von M, also M y , messbar.
Um zu zeigen, dass φM : y 7→ µ(M y ) messbar ist, wird das sogenannte
Prinzip der guten Mengen benutzt. Dieses Prinzip kann stets
verwendet werden, wenn man zeigen will, dass alle Mengen einer
bestimmten σ-Algebra A eine bestimmte Eigenschaft E haben. Man
zeigt einfach, dass alle Mengen mit der Eigenschaft E ihrerseits eine
σ-Algebra bilden und dass diese Σ-Algebra ein Erzeugendensystem
von A enthält. Dann enthält sie auch A und damit ist bewiesen, dass
Analysis 3
79
alle Mengen von A die Eigenschaft E haben.
In unserem Fall sei P die Menge aller M ⊂ X × Y, für die φM messbar
ist. Dann gilt
a) ∅ ∈ P,
b) M ∈ P ⇒ Mc ∈ P,
c) M1 , M2 , · · · ∈ P paarweise disjunkt, ⇒ M =
S
n Mn
∈ P,
d) P enthält alle messbaren Rechtecke.
Die Aussage (a) ist klar. (b) gilt wegen φMc = 1 − φM . (c) folgt aus
P
φM = n φMn . Die Aussage (d) schließlich gilt wegen φA×B = µ(A)1B . Sei
R die Menge der messbaren Rechtecke. Dann ist R schnittstabil und
mit Satz 4.1.1 folgt P = A (R) = A ⊗ B. Die rechte Seite der Identität
Z
µ ⊗ ν(M) =
µ(M y ) dν(y)
Y
definiert ein Maß auf A ⊗ B, das auf Rechtecken mit µ ⊗ ν
übereinstimmt, daher stimmt die rechte Seite für jedes M mit der linken
überein. Das Lemma folgt dann aus der Eindeutigkeit in Satz 4.2.4.
Nun zum Beweis des Satzes. Formel (a) folgt aus dem Lemma, wenn f
eine einfache Funktion ist. Ein beliebiges f ist aber ein monotoner
Limes einfacher Funktionen, damit folgt (a) allgemein.
Für Teil (b) zerlegt man f = u + iv und reduziert damit die Behauptung
auf reellwertige Funktionen. Weiter schreibt man f = f+ − f− . Ist etwa
Z Z
| f (x, y)| dy dx < ∞,
X
Y
Analysis 3
80
so folgt
Z Z
f+ (x, y) dy dx < ∞
X
Y
und die Fubini-Formel gilt für f+ und ebenso für f− . Zusammen folgt
die Behauptung.
• Für x, y > 0 ist
Beispiele 4.3.3.
x2 − y2
x
∂2
arctan
=
,
y
(x2 + y2 )2 ∂x∂y
also gilt
1
Z
0
Z
0
1
!
x2 − y2
π
dy
dx
=
,
4
(x2 + y2 )2
Z
1
1
Z
0
0
!
x2 − y2
π
dx
dy
=
−
.
4
(x2 + y2 )2
Die iterierten Integrale existieren beide, sich aber nicht gleich, also
ist diese Funktion nicht im Produktmaß integrierbar.
• Dieses Beispiel zeigt, dass die σ-Endlichkeit im Satz von Fubini
erforderlich ist. Sei X = Y = [0, 1] und versehe X mit dem
Lebesgue-Maß, den zweiten Faktor Y aber mit dem Zählmaß ζ,
welches nicht σ-endlich ist. Sei f (x, y) = 1 falls x = y und f (x, y) = 0
sonst. Dann gilt
Z
Z
Z
f (x, y) dλ(x) dζ(y) =
[0,1]
aber
Z
0 dζ(y) = 0.
[0,1]
[0,1]
Z
Z
f (x, y) dζ(y) dλ(x) =
[0,1]
[0,1]
1 dλ(x) = 1.
[0,1]
Analysis 3
5
81
Allgemeine Topologie
5.1
Abstrakte Topologie
Zur Erinnerung: Ein System O von Teilmengen einer gegebenen Menge
X heißt Topologie, falls es unter endlichen Schnitten und beliebigen
Vereinigungen abgeschlossen ist, genauer wenn
• ∅, X ∈ O,
• A, B ∈ O ⇒ A ∩ B ∈ O,
• Ai ∈ O ∀i∈I ⇒
S
i∈I
Ai ∈ O.
In Anlehnung an den Fall eines metrischen raums nennt die Elemente
von O auch die offenen Mengen der Topologie. Ein Tupel (X, O)
bestehend aus einer Menge X und einer Topologie auf X heißt
topologischer Raum.
Beispiele 5.1.1.
• Das System der offenen Mengen eines metrischen
Raumes ist eine Topologie.
• Die triviale Topologie kann man auf jeder Menge X installieren, in
ihr sind ∅ und X die einzigen offenen Mengen.
• Die diskrete Topologie auf einer Menge X besteht aus allen
Teilmengen, also O = P(X). Damit ist jede Menge offen.
• Die Co-endlich-Topologie. Hier ist X eine unendliche Menge und
A ⊂ X ist offen falls entweder A = ∅ oder falls das Komplement
X r A endlich ist.
Definition 5.1.2. Sei X ein topologischer Raum und sei x ∈ X. Eine
offene Umgebung von x ist eine offene Menge U ⊂ X, die x enthält. Eine
Analysis 3
82
Umgebung ist eine Menge V ⊂ X, die eine offene Umgebung umfasst.
Ein topologischer Raum X heißt Hausdorff-Raum, falls es zu je zwei
Punkten x , y in X Umgebungen U von x und V von y gibt, so dass
U ∩ V = ∅.
Das Bild illustriert diesen Sachverhalt.
x
•
y
•
U
Proposition 5.1.3.
V
a) Jeder metrische Raum ist ein Hausdorff-Raum.
b) Die Co-endlich-Topologie auf einer unendlichen Menge ist nicht
hausdorffsch.
c) Die Co-endlich-Topologie ist nicht von einer Metrik induziert.
Beweis. Für (a) sei X ein metrischer Raum und x , y zwei Punkte darin.
Sei ε =
d(x,y)
2
> 0, so sind die beiden offenen Umgebungen U = Bε (x) und
V = Bε (y) disjunkt, denn ist z ∈ Bε (x), dann ist d(x, z) < ε also ist
d(y, z) ≥ d(x, y) − d(x, z) > 2ε − ε = ε
also ist z nicht in Bε (y) und X ist damit hausdorffsch.
Sei nun X eine unendliche Menge und O die Co-endlich-Topologie auf
X. Seien x, y ∈ X und U eine Umgebung von x und V eine Umgebung
von y. Dann sind U und V beide co-endlich, also ist auch ihr Schnitt
V ∩ V co-endlich, denn es gilt
(U ∩ V)c = Uc ∪ V c ,
Analysis 3
83
wobei Uc = X r U das Komplement von U ist. Insbesondere ist also
U ∩ V nicht die leere Menge, damit X also nicht hausdorffsch. Der Teil
(c) folgt aus (a) und (b).
Definition 5.1.4. Ist Y ⊂ X und ist X ein topologischer Raum, so wird Y
zu einem topologischen Raum, indem man eine Teilmenge A ⊂ Y genau
dann offen nennt, wenn es eine offene Teilmenge B ⊂ X gibt mir
A = Y ∩ B. Diese Topologie auf Y nennt man die Teilraumtopologie von
Y in X.
Beispiel 5.1.5. Ist (X, d) ein metrischer Raum und ist A ⊂ X eine
Teilmenge, dann ist d auf A ebenfalls eine Metrik und induziert dort
eine Topologie. Andererseits erhält A die Teilraumtopologie von X.
Diese beiden Topologien auf A stimmen überein.
Beweis. Sei U ⊂ A offen in der Metrik. Zu jedem x ∈ U gibt es einen
n
o
Radius r(x) > 0, so dass der offene Ball a ∈ A : d(a, x) < r(x) in U
enthalten ist. Für x ∈ X sei Br (x) der offene Ball um x mit Radius r als
Teilmenge von X. Die Menge
V=
[
Br(x) (x)
x∈U
ist offen in X, denn sie ist eine Vereinigung von offenen Bällen. Es folgt
dann U = A ∩ V, also ist U offen in der Teilraumtopologie.
Sei umgekehrt U ⊂ A offen in der Teilraumtopologie, also existiert eine
offene Menge V ⊂ X so dass U = A ∩ V. Ist dann x ∈ U, so existiert ein
r > 0 so dass Br (x) ⊂ V gilt und damit Br (x) ∩ A ⊂ U. Die Menge
Br (x) ∩ A ist aber gerade der offene Ball mit Radius r um x in dem
metrischen Raum (A, d), so dass U auch in der Metrik auf A eine offene
Menge ist.
Ist X ein topologischer Raum, I eine Indexmenge und ist für jedes i ∈ I
Analysis 3
84
eine abgeschlossene Menge Ai ⊂ X gegeben, so ist der Schnitt
T
A = i∈I Ai wieder eine abgeschlossene Menge, denn das Komplement
c
[
\
c
A = Ai =
Aci
i∈I
i∈I
ist als Vereinigung offener Mengen wieder offen. Zu jeder Menge A ⊂ X
gibt es daher eine kleinste abgeschlossene Menge A, die A enthält,
genauer ist
A=
\
C.
C⊃A
C⊂X abgeschlossen
Diese Menge A wird der Abschluss von A in X genannt. Nach
Definition liegt A in jeder abgeschlossenen Menge, die A umfasst.
Lemma 5.1.6. Sei A eine Teilmenge des topologischen Raums X. Ein Punkt
x ∈ X gehört genau dann zum Abschluss A von A, wenn A ∩ U , ∅ für jede
Umgebung U von x gilt.
Beweis. Sei x ∈ X. Gibt es eine Umgebung U, die disjunkt zu A ist, dann
kann man U als offen annehmen und dann ist A ⊂ Uc und Uc ist
abgeschlossen, also folgt A ⊂ Uc und damit ist x < A. Ist umgekehrt
x < A, dann muss es eine abgeschlossene Teilmenge C ⊂ X geben, die A
umfasst und x nicht enthält. Dann ist aber U = X r C eine offene
Umgebung von x, die disjunkt zu A ist.
5.2
Stetigkeit
Definition 5.2.1. Eine Abbildung f : X → Y zwischen topologischen
Räumen heißt stetig, wenn für jede offene Menge U ⊂ Y das Urbild
f −1 (U) ⊂ X offen ist.
Analysis 3
85
Indem man zu Komplementen übergeht, sieht man, dass eine
Abbildung genau dann stetig ist, wenn für jede abgeschlossenen Menge
C ⊂ Y das Urbild f −1 (C) ⊂ X abgeschlossen ist.
Lemma 5.2.2. Seien f, g komponierbare Abbildungen zwischen topologischen
Räumen. Sind f und g stetig, dann ist auch die Komposition f ◦ g stetig.
Beweis. Seien g : X → Y und f : Y → Z und sei U ⊂ Z eine offene
Menge, dann ist f −1 (U) offen, da f stetig ist. Da überdies g stetig ist, ist
dann auch ( f ◦ g)−1 = g−1 f −1 (U) offen.
Definition 5.2.3. Eine Abbildung f : X → Y zwischen topologischen
Räumen heißt offene Abbildung, falls Bilder offener Mengen offen
sind, wenn also f (U) ⊂ Y offen ist für jede offene Menge U ⊂ X und f
heißt abgeschlossene Abbildung, falls f (C) abgeschlossen ist für jedes
abgeschlossene C ⊂ X.
Eine bijektive Abbildung f : X → Y heißt ein Homöomorphismus, falls
f stetig und offen ist. Dies ist genau dann der Fall, wenn sowohl f als
auch ihre Umkehrabbildung stetig sind.
Zwei topologische Räume X, Y heißen homöomorph, wenn es einen
Homöomorphismus X → Y gibt.
Beispiele 5.2.4.
• Die Abbildung f : R → R, x 7→ x2 ist stetig, aber
nicht offen, denn das Bild des offenen Intervalls (−1, 1) ist das
Intervall [0, 1), welches nicht offen ist.
• Jedes nichtleere offene Intervall (a, b) ⊂ R ist homöomorph zur
reellen Geraden R, denn die Abbildung
x 7→
1
1
+
a−x b−x
ist ein Homöomorphismus von (a, b) nach R.
Analysis 3
86
• Ein Rechteck [a, b] × [c, d] ⊂ R2 mit a < b, c < d ist homöomorph zur
abgeschlossenen Kreisscheibe B1 (0) = {(x, y) ∈ R2 : x2 + y2 ≤ 1}. Die
Konstruktion eines Homöomorphismus sei dem Leser zur Übung
gelassen.
Definition 5.2.5. (Punktweise Stetigkeit) Sei f : X → Y eine Abbildung
zwischen topologischen Räumen und sei x ∈ X. Die Abbildung f heißt
stetig im Punkt x, falls es zu jeder offenen Umgebung V von f (x) eine
offene Umgebung U von x gibt, die nach V abgebildet wird, d.h. dass
f (U) ⊂ V gilt.
Lemma 5.2.6. Eine Abbildung f : X → Y zwischen topologischen Räumen
ist genau dann stetig, wenn sie in jedem Punkt stetig ist.
Beweis. Sei f stetig und V eine offene Umgebung von f (x), dann ist
U = f −1 (V) eine offene Umgebung von x, die nach V abgebildet wird.
Sei umgekehrt f in jedem Punkt stetig und sei V ⊂ Y eine offene Menge
sowie U = f −1 (V) das Urbild. Es ist zu zeigen, dass U offen ist. Dazu sei
x ∈ U, so existiert, da f in x stetig ist und V eine offene Umgebung von
f (x) ist, eine offene Umgebung Ux von x, mit f (Ux ) ⊂ V oder
S
Ux ⊂ f −1 (V) = U. Es folgt, dass U = x∈U Ux eine Vereinigung von
offenen Mengen, also offen ist.
5.3
Kompaktheit und das Lemma von Urysohn
Ist X eine beliebige Menge ausgestattet mit der trivialen Topologie,
dann ist jede stetige Funktion von X nach R konstant. Dies ist ein
Beispiel für einen Raum, der nur wenige stetige Funktionen besitzt. Das
Lemma von Urysohn gibt nun eine Klasse von Räumen an, auf denen
es hinreichend viele stetige Funktionen gibt, um zum Beispiel Punkte
zu trennen, d.h. dass es zu je zwei Punkten x , y eine stetige Funktion f
Analysis 3
87
mit f (x) , f (y) gibt. Die folgende Definition verallgemeinert die
Definition von Kompaktheit in metrischen Räumen.
Definition 5.3.1. Eine Teilmenge K eines topologischen Raums X heißt
kompakt, falls jede offene Überdeckung eine endliche Teilüberdeckung
besitzt.
Das heißt, K ist genau dann kompakt, wenn es zu jeder Familie (Ui )i∈I
S
von offenen Mengen in X mit K ⊂ i∈I Ui eine endliche Teilmenge E ⊂ I
S
gibt, so dass bereits K ⊂ i∈E Ui gilt.
Insbesondere ist der Raum X selbst kompakt, wenn es zu jeder Familie
S
(Ui )i∈I von offenen Mengen mit X = i∈I Ui eine endliche Teilmenge
S
E ⊂ I gibt, so dass bereits X = i∈E Ui gilt.
Definition 5.3.2. Man sagt: eine Familie abgeschlossener Teilmengen
des topologischen Raums X hat die endliche Schnitteigenschaft, falls
T
i∈E Ai , ∅ für jede endliche Teilmenge E ⊂ I gilt.
In dem man von offenen Mengen zu deren Komplementen übergeht,
erhält man:
Lemma 5.3.3. Ein topologischer Raum X ist genau dann kompakt, wenn für
jede Familie (Ai )i∈I abgeschlossener Mengen mit der endlichen
T
Schnitteigenschaft der Gesamtschnitt nichtleer ist, also i∈I Ai , ∅ gilt.
Beweis. Ist
T
i∈I
Ai = ∅, dann bilden die Komplemente Ui = X r Ai eine
offene Überdeckung von X. Zu dieser gibt es eine endliche
T
Teilüberdeckung, also eine endliche Teilmenge E ⊂ I mit i∈E Ai = ∅.
Lemma 5.3.4. Sei X ein topologischer Raum, dann gilt
(a) Ist X kompakt und ist K ⊂ X eine abgeschlossene Teilmenge, dann ist K
kompakt.
Analysis 3
88
(b) Ist X ein Hausdorff-Raum und ist K ⊂ X kompakt, dann ist K
abgeschlossen.
(c) Stetige Bilder kompakter Mengen sind kompakt. Das heißt, ist f : X → Y
stetig und ist K ⊂ X kompakt, dann ist f (K) ⊂ Y kompakt.
Beweis. (a) Sei (Ui )i∈I eine Überdeckung von K, wobei jedes Ui eine
offene Teilmenge von X ist. Dann ist (Ui )i∈I ∪ {X r K} eine offene
Überdeckung von X. Da X kompakt ist, existieren Indizes i1 , . . . , il so
S
S
dass X ⊂ (X r K) ∪ lj=1 Ui j , also K ⊂ lj=1 Ui j .
(b) Sei x ∈ X r K. Es ist zu zeigen, dass es eine offene Umgebung U von
x gibt, so dass U ∩ K die leere Menge ist. Da X ein Hausdorff-Raum ist,
gibt es zu jedem y ∈ K offene Umgebungen V y von y und U y von x mit
V y ∩ U y = ∅. Dann ist (V y ) y∈K eine offene Überdeckung von K, also gibt
S
T
es y1 , . . . , yl ∈ K mit K ⊆ lj=1 V y j . Dann ist U = lj=1 U y j eine offene
Umgebung von x mit U ∩ K = ∅.
(c) Sei (Ui )i∈I eine offene Ueberdeckung von f (K), dann sind die
Urbilder ( f −1 (Ui ))i∈I eine offene Ueberdeckung von K. Es reichen also
endlich viele. Sei K ⊂ f −1 (Ui1 ) ∪ · · · ∪ f −1 (Uin ), dann folgt
f (K) ⊂ Ui1 ∪ · · · ∪ Uin .
Daher ist f (K) kompakt.
Definition 5.3.5. Ein topologischer Raum X heißt lokalkompakt, falls
jeder Punkt x ∈ X eine kompakte Umgebung besitzt.
Beispiele 5.3.6.
• Die Menge Rn ist lokalkompakt, da jeder Punkt x
eine kompakte Umgebung, etwa
[x1 − 1, x1 + 1] × · · · × [xn − 1, xn + 1] besitzt.
Analysis 3
89
• Hier ein Beispiel für einen nicht lokalkompakten metrischen
Raum. Der Raum C [0, 1] aller stetigen Funktionen von [0, 1] nach
C ist mit der Supremumsnorm ein normierter Vektorraum, also ein
metrischer Raum. Dieser Raum ist nicht lokalkompakt.
Beweis. Es reicht zu zeigen, dass die konstante Funktion
0 ∈ C [0, 1] keine kompakte Umgebung besitzt. Angenommen, es
gebe eine kompakte Umgebung K der Null. Dann enthält K einen
offenen Ball B2r (0) um Null, dieser enthält den abgeschlossenen
Ball B = Br (0), der als abgeschlossene Teilmenge des Kompaktums
K selbst wieder kompakt ist. Man konstruiert nun eine Folge f j in
B, die keine konvergente Teilfolge besitzt, was nach dem Satz von
Bolzano-Weierstraß zu einem Widerspruch führt. Für n ∈ N sei
f : [0, 1] → [0, r] die stetige Funktion, die außerhalb des Intervalls
i
hn
1
1
,
2n 2n−1 gleich Null ist und in diesem Intervall den Graphen
r
1
2n
1
2n−1
hat. In der Supremumsnorm ist einerseits fn [0,1]
= r für jedes
n ∈ N, also fn ∈ K, und andererseits gilt
lim fm − fn [0,1] = r
n→∞
für jedes m ∈ N, so dass es zu jedem m ein n0 gibt, so dass
fm − fn ≥ r/2 fü r jedes n ≥ n0 gilt. Damit besitzt die Folge ( fn )
keine Teilfolge, die eine Cauchy-Folge ist, also keine konvergente
Teilfolge.
Analysis 3
90
Definition 5.3.7. Eine Teilmenge A ⊂ X eines topologischen Raums
heißt relativ kompakt, falls der Abschluss A ⊂ X kompakt ist.
Lemma 5.3.8 (Lemma von Urysohn). Sei X ein lokalkompakter
Hausdorff-Raum. Sei K ⊂ X kompakt und A ⊂ X abgeschlossen mit K ∩ A = ∅.
(a) Es existiert eine relativ kompakte offene Umgebung U von K so dass
K ⊂ U ⊂ U ⊂ X r A.
(b) Es gibt eine stetige Abbildung mit kompaktem Träger f : X → [0, 1] mit
f ≡ 1 auf K und f ≡ 0 auf A.
Beweis. (a) Sei a ∈ A. Für jedes k ∈ K gibt es eine offene, relativ
kompakte Umgebung Uk von k und eine Umgebung Uk,a von a mit
Uk ∩ Uk,a = ∅. Die Familie (Uk )k∈K ist eine offene Überdeckung von K. Da
K kompakt ist, reichen endlich viele. Sei V die Vereinigung dieser
endlich vielen offenen Mengen und sei W der Schnitt der
entsprechenden endlich vielen Uk,a . Dann sind V und W offene
Umgebungen von K und a und V ist relativ kompakt.
Eine Wiederholung dieses Argumentes mit K in Rolle von a und V ∩ A
in der Rolle von K liefert disjunkte offene Umgebungen U0 von K und
W 0 von V̄ ∩ A. Die Menge U = U0 ∩ V erfüllt Teil (a) des Lemmas.
(b) Wähle ein U das (a) erfüllt und ersetze A durch X r U. Hierdurch
sieht man, dass es reicht, (b) zu beweisen ohne die Forderung nach
kompaktem Träger.
Wähle also wieder ein U, das Teil (a) erfüllt und benenne dieses U mit
U 1 . Wiederrum nach (a) existiert eine relativ kompakte offene
2
Umgebung U 1 von U 1 so dass U 1 ⊂ U 1 ⊂ U 1 ⊂ Ac . Sei R die Menge aller
4
Zahlen der Gestalt
2
k
2n
2
4
4
im Intervall [0, 1). Formal setze U0 = Ac . Durch
Analysis 3
91
Iteration der obigen Konstruktion erhält man offene Mengen Ur , r ∈ R,
mit K ⊂ Ur ⊂ Ur ⊂ Us ⊂ Ac für alle r > s in R. Für x ∈ A setze f (x) = 0
und für x < A sei f (x) = sup{r ∈ R : x ∈ Ur }. Dann gilt f ≡ 1 auf K. Für
r > s in R gilt
[
f (s, r) =
−1
Us0 r Us00 ,
s<s0 <s00 <r
dies ist eine offene Menge. Ähnlich sieht man, dass f −1 [0, s) und
−1
f (r, 1] offen sind. Da die Intervalle der Form (r, s), [0, s) und (r, 1] die
Topologie auf [0, 1] erzeugen, ist f stetig.
5.4
Erzeuger und Abzählbarkeit
Für ein gegebenes System von Teilmengen E ⊂ P(X) existiert eine
kleinste Topologie, die E enthält, nämlich den Schnitt über alle
Topologien, die E enthalten,
OE =
\
O.
O ⊃E
O Topologie
Man nennt OE die von E erzeugte Topologie. Die Tatsache, dass OE in
der Tat eine Topologie ist, ist leicht einzusehen, so gilt etwa ∅, X ∈ OE ,
weil diese Mengen in allen Topologien liegen. Weiter seien etwa
A, B ∈ OE , dann liegen A und B in allen Topologien, die E enthalten.
Diese Topologien enthalten dann auch alle den Schnitt A ∩ B, der
demzufolge in OE liegt. Vereinigungen werden ebenso behandelt.
Lemma 5.4.1. Sei E ⊂ P(X) beliebig. Sei dann S ⊂ P(X) das System aller
Mengen der Form
A1 ∩ · · · ∩ An ,
Analysis 3
92
wobei A1 , . . . , An ∈ E . Als nächstes sei T 0 das System aller Mengen der Form
[
Si ,
i∈I
mit Si ∈ S für jedes i ∈ I. Schließlich setze T = T 0 ∪ {∅, X}. Dann gilt
OE = T .
Beweis. Jede Topologie, die E enthält, enthält auch S und T , also
T ⊂ OE . Wenn man andererseits zeigt, dass T selbst eine Topologie ist,
folgt, da T den Erzeuger E enthält, schon T ⊃ OE . Es bleibt also zu
zeigen, dass T eine Topologie ist.
• ∅, X ∈ T gilt nach Definition.
• Beliebige Vereinigungen von Elementen von T sind wieder
Elemente von T .
• Man zeigt A, B ∈ T ⇒ A ∩ B ∈ T . Ist eine der beiden Mengen
gleich ∅ oder X, so ist die Behauptung klar. Seien also
A=
[
Si ,
B=
Tj
j∈J
i∈I
mit Si , T j ∈ S . Dann ist A ∩ B =
[
S
I∈I
j∈J
Si ∩ T j . Mit Si , T j ∈ S folgt
aber Si ∩ T j ∈ S , also ist A ∩ B ∈ T .
Damit ist der Beweis abgeschlossen.
Definition 5.4.2. Eine Umgebungsbasis eines Punktes x ∈ X ist eine
Familie (Ui )i∈I von Umgebungen von x so dass jede Umgebung U eines
der Ui umfasst. Ist jedes Ui offen, so spricht man von einer offenen
Umgebungsbasis.
Man sagt, ein topologischer Raum X genügt dem ersten
Analysis 3
93
Abzählbarkeitsaxiom, wenn jeder Punkt x eine abzählbare
Umgebungsbasis besitzt.
• Sei (X, d) ein metrischer Raum. Für jedes x ∈ X ist
die Familie der Bälle B1/n (x) n∈N eine Umgebungsbasis von x. Also
Beispiele 5.4.3.
genügt jeder metrische Raum dem ersten Abzählbarkeitsaxiom.
• Die Co-endlich Topologie auf einer überabzählbaren Menge X
genügt nicht dem ersten Abzählbarkeitsaxiom.
Definition 5.4.4. Eine Basis der Topologie oder Topologie-Basis ist
eine Familie (Ui )i∈I von offenen Mengen, so dass jede offene Menge als
Vereinigung von Mitgliedern Ui der Familie geschrieben werden kann.
Ein Beispiel ist die Menge B aller offenen Intervalle (a, b) in R, wobei a
und b rationale Zahlen sind. Die Menge B ist eine Topologie-Basis von
R.
Definition 5.4.5. Ein topologischer Raum genügt dem zweiten
Abzählbarkeitsaxiom, wenn er eine abzählbare Topologie-Basis besitzt.
Es ist eine Konsequenz des Lemmas 5.4.1, dass ein Raum genau dann
dem zweiten Abzählbarkeitsaxiom genügt, wenn die Topologie einen
abzählbaren Erzeuger besitzt.
Beispiel 5.4.6. Ein Beispiel für einen Raum, der keine abzählbare
Topologiebasis besitzt, ist schnell gegeben: Sei X eine überabzählbare
Menge und O = P(X) die diskrete Topologie. Dann ist die Menge aller
Singletons {x} mit x ∈ X die kleinste Topologiebasis die es gibt. Diese ist
nicht abzählbar.
Analysis 3
5.5
94
Initial- und Final-Topologien
Viele wichtige und nützliche Topologien sind nur implizit gegeben. Die
meisten sind Initial- oder Final-Topologien. Diese sind jeweils durch
Abbildungen von oder in topologische Räume induziert.
Initialtopologien
Definition 5.5.1. Sei X eine Menge und fi : X → Yi eine Familie von
Abbildungen, wobei die Yi topologische Räume sind. Die
Initialtopologie auf X induziert durch die Familie ( fi )i∈I ist die kleinste
Topologie auf X, bezüglich der alle fi stetig sind. Also ist es die
Topologie, die durch alle Urbilder fi−1 (U) offener Mengen U ⊂ Yi
erzeugt wird.
Beispiele 5.5.2.
• Sei A ⊂ X eine Teilmenge des topologischen Raums
X. Die Teilraumtopologie von A ist genau die Initialtopologie, die
von der Inklusionsabbildung i : A ,→ X induziert wird.
• Sei (Xi )i∈I eine Familie topologischer Räume. Sei X =
Q
i∈I
Xi das
kartesische Produkt der Räume Xi . Die Produkttopologie auf X ist
die Initial-Topologie der Koordinaten-Projektionen pi : X → Xi . Sie
wird also erzeugt von allen Mengen der Form
Ui ×
Y
X j,
i,j
wobei Ui ⊂ Xi eine offene Menge ist. Nach Lemma 5.4.1 ist jede
offene Menge in X eine Vereinigung von Mengen der Gestalt
Y Y
Ui ×
Xi ,
i∈E
i<E
Analysis 3
95
wobei E ⊂ I eine endliche Teilmenge der Indexmenge I ist.
Lemma 5.5.3. Die Topologie auf Rn , die durch die euklidische Metrik definiert
Q
wird, stimmt mit der Produkttopologie von Rn = nj=1 R überein.
Beweis. Eine Menge U ⊂ Rn ist genau dann offen in der euklidischen
Metrik, wenn sie eine Vereinigung von offenen Bällen ist. Sie ist genau
dann offen in der Produkt-Topologie, wenn sie eine Vereinigung von
offenen Quadern (a1 , b1 ) × · · · × (an , bn ) ist. Um also zu zeigen, dass diese
Topologien übereinstimmen, reicht es, zu zeigen, dass jeder offene
Quader eine Vereinigung offener Bälle und jeder offene Ball
Vereinigung offener Quader ist. Sei also Q = (a1 , b1 ) × · · · × (an , bn ) ein
offener Quader und sei x ∈ Q. Dann liegt der Ball Br (x) mit Radius
r = min(|a1 − x1 |, . . . , |an − xn |, |bn − xn |, . . . , |bn − xn |)
ganz in Q. Also gibt es zu jedem x ∈ Q einen offenen Ball Bx mit
S
x ∈ Bx ⊂ Q, so dass Q = x∈Q Bx gilt. Sei umgekehrt ein offener Ball B
gegeben und sei x ∈ B. Dann enthält B einen offenen Ball Br (x) mit
Zentrum x. Dieser wiederum enthält einen offenen Quader, der x
enthält.
Proposition 5.5.4. Sei X eine Menge versehen mit der Initial-Topologie
induziert durch die Abbildungen fi : X → Yi , i ∈ I. Eine Abbildung
α : W → X von einem topologischen Raum W ist genau dann stetig, wenn alle
Abbildungen fi ◦ α : W → Yi stetig sind.
Beweis. Sei α stetig, dann ist fi ◦ α als Komposition stetiger
Abbildungen selbst auch stetig. Andersherum, nimm an, dass alle fi ◦ α
stetig sind. Sei E das System von Teilmengen von X der Form fi−1 (U)
wobei U eine offene Teilmenge von Yi ist. Dann erzeugt E die Topologie
Analysis 3
96
O von X. Sei Oα die größte Topologie auf X, die α stetig sein lässt, dann,
da fi ◦ α stetig ist, folgt E ⊂ Oα , deshalb O ⊂ Oα , also ist α stetig.
Beispiel 5.5.5. Für eine gegebene Familie von topologischen Räumen
Q
Xi , i ∈ I, sei X = i∈I Xi das Produkt der Xi , versehen mit der
Produkttopologie. Sei pi : X → Xi die i-te Projektion. Eine Abbildung
f : W → X von einem topologischen Raum W ist genau dann stetig,
wenn alle Abbildungen pi ◦ f : W → Xi stetig sind. Dies bedeutet zum
Beispiel, dass für zwei topologische Räume X, Y und y0 ∈ Y die
Abbildung X → X × Y, die x auf (x, y0 ) wirft, stetig ist.
Lemma 5.5.6. Ein topologischer Raum X ist genau dann hausdorffsch, wenn
die Diagonale
∆ = {(x, x) : x ∈ X}
eine abgeschlossene Teilmenge von X × X ist.
Beweis. Der Raum X × X trägt die Produkttopologie, das heißt die
Familie aller offenen Rechtecke: U × V, wobei U, V ⊂ X offene Mengen
sind, ist eine Topologiebasis. Daher ist die Abgeschlossenheit von ∆
äquivalent dazu, dass ∆c = X × X r ∆ eine Vereinigung von offenen
Rechtecken ist, was wiederum bedeutet, dass es zu x , y in X, also
(x, y) ∈ ∆c offene Mengen U, V gibt, so dass (x, y) ∈ U × V ⊂ ∆c , mit
anderen Worten: x ∈ U, y ∈ V und U ∩ V = ∅.
Finaltopologien
Definition 5.5.7. Sei X eine Menge und sei gi : Wi → X, i ∈ I eine
Familie von Abbildungen von topologischen Räumen Wi . Die
Final-Topologie auf X induziert durch die Familie (gi )i∈I ist die größte
Topologie auf X, bezüglich der alle gi stetig sind. Eine Teilmenge U ⊂ X
ist genau dann offen in der Final-Topologie, wenn jedes Urbild
Analysis 3
97
g−1
(U) ⊂ Wi offen ist. Ein Spezialfall der Finaltopologie ist die
i
Quotiententopologie auf Z/ ∼, wobei Z ein topologischer Raum ist und
∼ eine Äquivalenzrelation. Die Quotiententopologie ist dann die
Finaltopologie der Projektion Z → Z/ ∼.
Beispiel 5.5.8. Ein wichtiges Beispiel einer Finaltopologie ist die
Verklebung. Seien X, Y topologische Räume, U ⊂ X eine Teilmenge und
φ : U → Y eine stetige Abbildung. Die Verklebung von X und Y entlang
·
φ ist die Menge X∪Y/
∼, wobei ∼ die Äquivalenzrelation ist, die sich
durch Identifikation von u ∈ U mit φ(u) ergibt. Genauer gilt a ∼ b genau
dann, wenn a = b oder a ∈ U und b = φ(a) oder umgekehrt. Im Bild ist
die Verklebung zweier gestreckter Ovale entlang der Identifikation
zweier Seiten zu sehen.
φ
{
Proposition 5.5.9. Sei X eine Menge versehen mit der Final-Topologie
induziert durch Abbildungen gi : Wi → X, i ∈ I. Eine Abbildung β : X → Y
in einen topologischen Raum Y ist genau dann stetig, wenn alle Abbildungen
β ◦ gi : Wi → Y stetig sind.
Beweis. Ist β : X → Y stetig so ist jede Verknüpfung β ◦ gi stetig. Sei
umgekehrt β : X → Y eine Abbildung, so dass jede Verknüpfung β ◦ gi
stetig ist. Sei dann U ⊂ Y eine offene Menge und sei V = β−1 (U) ⊂ X.
−1
−1
−1
Für jedes i ∈ I ist dann gi (V) = gi β (U) = (β ◦ gi )−1 (U) offen in Wi ,
also ist V offen und damit ist β stetig.
Beispiel 5.5.10. Ein wichtiges Beispiel einer Finaltopologie ist der
Raum Cc (Rn ) aller stetigen Funktionen f : Rn → R mit kompakten
Analysis 3
98
Trägern. Für jedes Kompaktum K ⊂ Rn sei CK (Rn ) die Teilmenge aller
stetigen Funktionion mit Träger in K. Mit Hilfe der Supremumsnorm
installiert man auf CK (Rn ) eine Metrik
dK ( f, g) = f − gK = sup | f (x) − g(x)|.
x∈K
Auf Cc (Rn ) installiert man dann die Finaltopologie gegeben durch alle
Inklusionen CK (Rn ) ,→ Cc (Rn ), wenn K durch alle kompakten
R
Teilmengen läuft. Das Integral f 7→ Rn f (x) dx liefert eine stetige
Abbildung Cc (Rn ) → R.
Analysis 3
6
99
Differentialformen
6.1
Mannigfaltigkeiten
Definition 6.1.1. Seien n ≤ N natürliche Zahlen. Eine Teilmenge
M ⊂ RN , versehen mit der Teilraumtopologie, heißt n-dimensionale
Mannigfaltigkeit, falls es zu jedem Punkt p ∈ M eine offene Umgebung
U ⊂ M gibt, auf der ein Homöomorphismus
∼
φ:U→
Rn
definiert ist. Ein solches φ heißt Karte der Mannigfaltigkeit M. Die
Menge U heißt Kartenumgebung von p.
Beachte: Jeder offene Quader {x ∈ Rn : a j < x j < b j } , ∅ in Rn ist
homöomorph zum Rn , etwa durch die Abbildung ψ : (a, b) → Rn mit
den Koordinaten
ψ(x) j =
1
1
+
.
aj − xj bj − xj
Ebenso ist jeder offene Ball Br (a) in Rn homöomorph zu Rn .
Beispiele 6.1.2.
• Rn selbst ist eine Mannigfaltigkeit der Dimension
n.
• Die n-Sphäre
Sn = {x ∈ Rn+1 : ||x|| = 1}
ist eine n-dimensionale Mannigfaltigkeit. Dies kann man auf
verschiedene Weisen einsehen. Sei etwa x0 ∈ Sn und sei H ⊂ Rn der
Orthogonalraum zu x, also
H = {y ∈ Rn+1 : x0 , y = 0}.
Dann ist H ein n-dimensionaler Untervektorraum, also ist der
Analysis 3
100
Raum H homöomorph zu Rn . Sei U = {x ∈ Sn : hx, x0 i > 0}. Dann ist
U eine offene Umgebung von x0 in Sn und die
Orthogonalprojektion p : Rn+1 → H bildet U homöomorph auf
einen offenen Ball in H ab. Im Bild ist der Fall n = 1 dargestellt.
• x0
H
• Der Torus T2 ⊂ R3 ist homöomorph zu (S1 ) × (S1 ). Er kann definiert
werden als die Menge aller x ∈ R3 , die zu dem Kreis 2S1 ⊂ R2 ⊂ R3
den Abstand 1 haben.
Man kann den Torus in Koordinaten (x, y, z) konstruieren, indem man
etwa in der (x, z)-Ebene einen Kreis mit Radius 1 um den Punkt (2, 0) in
der (x, y)-Richtung um den Nullpunkt rotieren lässt. Der Kreis kann
geschrieben werden als die Menge aller (2 + cos(t), 0, sin(t)) mit t ∈ R.
Also kann man den Torus beschreiben als die Menge aller
Analysis 3
101
Spaltenvektoren der Form
cos(s) − sin(s)
φ(s, t) = sin(s) cos(s)
1
2 + cos(t)
0
sin(t)
wobei s, t ∈ R. Diese Abbildung ist periodisch mit Periode 2π in beiden
Argumenten, liefert also eine Bijektion
R2 /(2πZ)2 −→ T2 ,
die auch zur Konstruktion lokaler Karten verwendet werden kann
(Übungsaufgabe!).
Definition 6.1.3. Ein Atlas einer Mannigfaltigkeit M ist eine Familie von
S
Karten (φ j , U j ), die ganz M überdecken, also dass M = j U j gilt. Eine
Karte φ : U → Rn heißt glatte Karte, falls die Umkehrabbildung
ψ : Rn → U ⊂ RN glatt, also unendlich oft differenzierbar ist und die
Funktionalmatrix Dψ(x) für jedes x ∈ Rn den vollen Rang (nämlich n)
besitzt. Die Mannigfaltigkeit M heißt glatte Mannigfaltigkeit, falls die
glatten Karten einen Atlas bilden.
Beispiel 6.1.4. Die Oberfläche eines Würfels im R3 ist eine
Mannigfaltigkeit, die nicht glatt ist. Sie ist aber homöomorph zur
glatten Mannigfaltigkeit S2 .
Sei M eine glatte Mannigfaltigkeit und (φ, U), (ψ, V) zwei glatte Karten.
Dann ist die Abbildung ψ ◦ φ−1 ,
φ
R
n
z
U∩V
ψ◦φ−1
ψ
/
$
Rn ,
definiert auf der offenen Menge φ(U ∩ V) ⊂ Rn , eine glatte Abbildung,
Analysis 3
102
wie aus dem Satz von der lokalen Umkehrfunktion folgt.
Definition 6.1.5. Eine Abbildung F : M → N zwischen glatten
Mannigfaltigkeiten heißt glatte Abbildung, falls für je zwei glatte
Karten
φ
Rn
M
∪
U
F
αF
N
∪
V
ψ
Rn
die induzierte Abbildung αF glatt ist, dort, wo sie definiert ist, nämlich
auf der Menge φ(F−1 (V) ∩ U)).
Ein Diffeomorphismus ist eine glatte Abbildung F : M → N die bijektiv
ist, so dass die Umkehrabbildung F−1 ebenfalls glatt ist. Es bezeichne
C∞ (M) den Vektorraum der glatten Funktionen f : M → R.
Sei M eine glatte Mannigfaltigkeit und sei p ∈ M ein Punkt. Der
Tangentialraum an p ist definiert als
Tp M = Bild Dψ(x) ⊂ RN ,
wobei φ : U → Rn eine glatte Karte ist, ψ = φ−1 , Dψ das Differential und
x = φ(p) ∈ Rn . Dieser Untervektorraum des RN hängt nicht von der
Wahl der Karte ab, wie folgendes Lemma zeigt.
Lemma 6.1.6. Tp M ist die Menge aller Ableitungen γ0 (0), wobei
γ : (−ε, ε) → M eine glatte Kurve ist mit γ(0) = p.
Beweis. “⊂” Sei v ∈ Rn und sei γ(t) = ψ(x + tv). Dann ist γ glatt und
γ0 (0) = Dψ(x)v.
“⊃” Sei γ eine solche Kurve und sei σ = φ ◦ γ. Dann ist γ = ψ ◦ σ und
γ0 (0) = Dψ(x)σ0 (0).
Analysis 3
103
Beispiel 6.1.7. Sei M = T = {z ∈ C : |z| = 1} der Einheitskreis. Dann ist T
eine Mannigfaltigkeit. Glatte Karten sind zum Beispiel durch die
Umkehrfunktion von t 7→ e2πit gegeben, wenn man einmal t ∈ (− 12 , 12 )
und einmal t ∈ (0, 1) wählt. Der Tangentialraum in z = e2πit ist
Tz M = Re2πit i.
Tz M
z
6.2
Derivationen
Ist F : M → N eine glatte Abbildung zwischen zwei glatten
Mannigfaltigkeiten und ist p ∈ M, so definiert man eine lineare
Abbildung
DF(p) : Tp M → TF(p) N
in der folgenden Weise: Man wählt eine glatte Karte φ um p und eine
weitere ψ um F(p) wie oben und definiert αF wie oben. Dann ist DF(p)
die Verkettung
Tp M
D(φ−1 )(0)−1
/
Rn
DαF (0) n0
/R
D(ψ−1 )(0)
/
TF(p) N.
Lemma 6.2.1 (Interpretation des Differentials durch Kurven). Sei
Analysis 3
104
F : M → N eine glatte Abbildung und p ∈ M. Sei γ : (−ε, ε) → M eine glatte
Kurve mit γ(0) = p. Dann ist X = γ0 (0) in Tp M. Sei τ : (−ε, ε) → N die
glatte Kurve τ = F ◦ γ. Dann gilt
τ0 (0) = DF(X).
Beweis. Man wählt Karten, transportiert den Weg γ dadurch nach Rn
und betrachtet F als Abbildung Rn → Rk . Dann folgt die Aussage aus
der Kettenregel.
Sei γ : (−ε, ε) → M eine glatte Kurve mit γ(0) = p. Für f ∈ C∞ (M) setze
d
f γ(t) X( f ) =
dt
t=0
Dies definiert eine lineare Abbildung X : C∞ (M) → R mit der
Eigenschaft
X( f g) = f (p)X(g) + X( f )g(p)
(Produktregel in p)
Definition 6.2.2. Sei T̃p M die Menge aller linearen Abbildungen X von
C∞ (M) nach R, die im Punkt p der Produktregel genügen. Die Elemente
des Raums T̃p M werden Punktderivationen in p genannt.
Beispiel 6.2.3. Koordinatenableitungen. Sei M = Rn und p = 0. Für
j = 1, . . . , n ist D j , definiert durch
D j( f ) =
∂f
(0),
∂x j
ein Element von T̃p M.
Lemma 6.2.4. Sei K ⊂ Rn kompakt und sei U ⊂ Rn offen mit K ⊂ U. Dann
existiert eine glatte Funktion f : Rn → [0, 1] mit f ≡ 1 auf K und f ≡ 0
außerhalb von U.
Analysis 3
105
Beweis. Nach dem Lemma von Urysohn existiert eine stetige Funktion
mit den genannten Eigenschaften. Die Funktion
−1/x 1/(1−x)
e
0 < x < 1,
e
χ(x) =
0
sonst,
Ist glatt auf R und hat kompakten Träger [0, 1]. Sei ε > 0.
Durch geeignete Wahl von Zahlen a, b, c ∈ R kann man eine glatte
Funktion fε (x) = cχ(a ||x||2 + b) auf Rn konstruieren, so dass der Träger
R
von fε in dem ε-Ball Bε (0) um Null liegt, fε ≥ 0 ist und Rn fε (x) dx = 1
gilt.
Da K kompakt ist, gibt es zwei offene, relativ kompakte Umgebungen
V1 , V2 von K mit K ⊂ V1 ⊂ V̄1 ⊂ V2 ⊂ V̄2 ⊂ U. Sei ε > 0 so klein, dass die
n
o
n
offene Umgebung Uε (K) = x ∈ R : ∃ y∈K |x − y| < ε von K noch in V1
liegt und V̄2 Abstand > ε zu Rn \ U hat. Sei nun f˜ : Rn → [0, 1] eine
stetige Funktion mit f˜ ≡ 1 auf V̄1 und f˜ ≡ 0 außerhalb von V2 . Dann
leistet die Funktion f = fε ∗ f˜ das Gewünschte.
Definition 6.2.5. Sei M eine glatte Mannigfaltigkeit und (φ, U) eine
glatte Karte. Seien x1 , . . . xn : U → R die Koordinaten von φ, also
φ(p) = x1 (p), . . . , xn (p) . Man sagt, die Funktionen x1 , . . . , xn sind lokale
Koordinaten auf M.
Ist φ(p) = x, so definiere Punktderivationen
∂
∂x j
durch
∂( f ◦ φ−1 )
∂
(f) =
(x).
∂x j
∂x j
Eine suggestive Schreibweise ist
∂f
∂x j (x).
Analysis 3
106
Satz 6.2.6. Die oben definierte Abbildung
Tp M = γ0 (0) : γ(0) = p → T̃p M
ist ein Vektorraumisomorphismus. Es gibt also einen kanonischen
Isomorphismus Tp M T̃p M. Ist (φ, U) eine glatte Karte mit φ(p) = 0, so
ist
(
)
∂
∂
T̃p M = µ1
+ · · · + µn
: µ ∈ Rn ,
∂x1
∂xn
wobei x1 , . . . , xn die lokalen Koordinaten von φ sind. Das bedeutet, dass
∂
∂
∂x1 , . . . , ∂xn
eine Basis des reellen Vektorraums T̃p M ist.
Beweis. Für µ ∈ Rn sei Xµ = µ1 ∂x∂ 1 + · · · + µn ∂x∂n ∈ T̃p M. Es reicht zu
zeigen, dass die Abbildung µ 7→ Xµ ein Vektorraumisomorphismus von
Rn nach T̃p M ist. Zeige zunächst: Für X ∈ T̃p M hängt X( f ) nur von f |U
ab, wobei U eine beliebig kleine Umgebung von p ist. Sei hierfür
g ∈ C∞ (M) mit g|U ≡ 0 für eine offene Umgebung U von p, die klein
genug ist, um in einer Kartenumgebung zu liegen. Dann gibt es eine
offene Umgebung V von p mit V ⊂ V̄ ⊂ U ⊂ Ū und nach Lemma 6.2.4
gibt es h ∈ C∞ (M) mit h|V ≡ 0, h|M\U ≡ 1. Daher gilt g = hg. Es folgt
X(g) = X(hg) = X(h) g(p) + h(p) X(g) = 0.
|{z} |{z}
=0
=0
Gilt also f ≡ f1 auf U, so folgt X( f − f1 ) = 0 also X( f ) = X( f1 ). Nach
Anwendung einer Kartenabbildung reicht es daher aus, den Satz für
M = Rn und p = 0 zu zeigen.
Die Abbildung µ 7→ Xµ ist injektiv: sei x j die j-te Koordinatenabbildung,
Analysis 3
107
dann ist
Xµ (x j ) = µ1
∂x j
∂x1
+ · · · + µn
∂x j
∂xn
= µ j.
Sie ist surjektiv: sei X ∈ T̃p M = T̃0 Rn . Sei µ j = X(x j ) für j = 1, . . . , n. Sei
Y = X − Xµ . Zu zeigen ist: Y = 0. Sei zunächst h(x) = xi x j g(x) für
g ∈ C∞ (Rn ). Dann ist
X(h) = X xi x j g(x) = xi (0)X(x j g) + x j (0)g(0)X(xi ) = 0.
Nach der Theorie der Taylor-Reihen kann jedes f ∈ C∞ (Rn ) geschrieben
werden als
f (x) = c + α1 x1 + · · · + αn xn +
X
xi x j gi, j ,
i,j
mit gi, j ∈ C∞ (Rn ). Es folgt Y( f ) = Y(c) = Y(1 · c) = Y(1)c + Y(c) = 2Y(c).
Also Y( f ) = 0.
Definition 6.2.7. Sei p ∈ M. Ein Koordinatensystem x1 , . . . xn heißt
zentriert an p, falls x(p) = 0.
Ab jetzt wird Tp M mit T̃p M identifiziert. Man sagt also:
Tangentialvektoren sind Punktderivationen. Dies ist die abstrakte
Definition des Tangentialraums.
Ein Vektorfeld auf M ist eine stetige Abbildung X : M → RN so dass für
jedes p ∈ M der Vektor X(p) im Tangentialraum Tp M liegt. Man schreibt
auch Xp statt X(p).
Ist X ein Vektorfeld auf M, so definiert Xp ∈ Tp M eine Punktderivation
und für f ∈ C∞ (M) erhält man eine Abbildung
X f : M → R,
p 7→ Xp ( f ).
Analysis 3
108
In lokalen Koordinaten x1 , . . . , xn lässt sich ein Vektorfeld X in der Form
Xp = µ1 (p)
∂
∂
+ · · · + µn (p)
∂x1
∂xn
schreiben, wobei µ1 , . . . , µn in der Kartenumgebung definierte stetige
reellwertige Funktionen sind. Dann ist
X f (p) = µ1 (p)
∂f
∂f
(p) + · · · + µn (p)
(p).
∂x1
∂xn
Das Vektorfeld X ist als Abbildung von M nach RN genau dann glatt,
wenn für alle glatten lokalen Koordinaten die Koordinatenfunktionen
µ1 , . . . , µn glatt sind und das ist wiederum genau dann der Fall, wenn
X f für jedes f ∈ C∞ (M) eine glatte Funktion ist. Ein glattes Vektorfeld
liefert also eine lineare Abbildung X : C∞ (M) → C∞ (M) mit der
Eigenschaft:
X( f g) = X( f )g + f X(g)
(Produktregel)
Eine solche Abbildung nennt man eine Derivation. Es gibt also eine
natürliche Bijektion
n
o
n
o
∞
glatte Vektorfelder auf M ↔ Derivationen von C (M) .
Lemma 6.2.8 (Interpretation des Differentials). Ist F : M → N glatt, so ist
DFp : Tp M → TF(p) N
gegeben durch
DF(Xp ) f = Xp ( f ◦ F),
f ∈ C∞ (N).
Beweis. Die Derivation Xp kann als γ0 (0) fuer eine glatte Kurve γ
dargestellt werden. Die Aussage folgt dann aus Lemma 6.2.1.
Analysis 3
109
F
G
Lemma 6.2.9 (Kettenregel). Sind M −→ N −→ L glatt, so gilt
d(G ◦ F)p = dGF(p) ◦ dFp
Beweis. Die Behauptung folgt aus der Rechnung
d(G ◦ F)(Xp ) f = Xp ( f ◦ G ◦ F) = dF(Xp )( f ◦ G) = dG dF(Xp ) ( f ).
Lemma 6.2.10 (Koordinatenwechsel). Seien (x j ) und (yi ) zwei lokale
Koordinatensysteme auf M. Wo beide definiert sind, gilt
n
X ∂yi ∂
∂
=
∂x j
∂x j ∂yi
i=1
Beweis. Sei f eine glatte Funktion auf M und sei φ = f ◦ x−1 : Rn → R.
Dann ist
∂f
∂x j
−1
ψ= f ◦y
= D j φ die j-te Richtungsableitung von φ. Sei
: Rn → R. Es folgt
φ = f ◦ x−1 = f ◦ y−1 ◦ y ◦ x−1 = ψ ◦ α
mit α = y ◦ x−1 : Rn → Rn . Also gilt nach Kettenregel
dφ(x) = dψ (α(x)) dα(x).
Es ist aber dα(x) =
6.3
∂yi
∂x j
, was die Behauptung liefert.
i,j
Multilineare Algebra
Im eindimensionalen wird das Integral negativ, wenn man die
Integrationsrichtung wechselt. In höherer Dimension passiert dasselbe,
wenn man in einer Koordinate die Richtung wechselt, aber auch, wenn
man zwei Koordinaten vertauscht. Dies ist genau das Verhalten von
alternierenden Multilinearformen, die deshalb als lokales Modell für
Analysis 3
110
die definition von Differentialformen dienen.
Seien k, n ∈ N und V ein reeller Vektorraum der Dimension n. Eine
Abbildung ω : V k → R heißt multilinear oder Multilinearform, falls
v 7→ ω(v1 , . . . , v j−1 , v, v j+1 , . . . , vk )
für jede feste Wahl von v1 , . . . , v j−1 , v j+1 , . . . , vk eine lineare Abbildung
ist. Die Form ω heißt alternierend, falls
ω(. . . , v, . . . , w, . . . ) = −ω(. . . , w, . . . , v, . . . ),
das heißt, die Form wechselt das Vorzeichen, wenn man zwei Einträge
vertauscht. Sei Altk V die Menge der alternierenden Multilinearformen
auf V k .
Lemma 6.3.1. Altk V ist ein Vektorraum bezüglich punktweiser Addition und
Skalarmultiplikation.
Beweis. Die Eigenschaften sind stabil unter punktweiser Addition und
Skalarmultiplikation.
Für gegebene Elemente α1 , . . . , αk des Dualraums V ∗ sei die
Multilinearform α1 ∧ · · · ∧ αk durch
α1 ∧ · · · ∧ αk (v1 , . . . , vk ) = det αi (v j )
i, j
definiert.
Beispiel 6.3.2. Im Falle k = 2 ist
α ∧ β(v, w) = α(v)β(w) − α(w)β(v).
Da die Determinante eine alternierende Multilinearform ist, ist
Analysis 3
111
α1 ∧ · · · ∧ αk auch eine. Es folgt: die Abbildung
α 7→ . . . ∧ α ∧ . . .
ist linear und
··· ∧ α ∧ ··· ∧ β ∧ ··· = −··· ∧ β ∧ ··· ∧ α ∧ ....
Proposition 6.3.3. Sei φ1 , . . . , φn eine Basis von V ∗ . Dann bilden die
Elemente
φi1 ∧ · · · ∧ φik ,
1 ≤ i1 < · · · < ik ≤ n
eine Basis von Altk V. Insbesondere ist die Dimension
des Vektorraums
!
n
.
dim Altk V gleich dem Binomialkoeffizienten
k
Beweis. Sei ω ∈ Altk V eine gegebene Multilinearform.
Zu der gegebenen Basis φ1 , . . . , φn von V ∗ sei φ∗1 , . . . , φ∗n die duale Basis
von V ∗∗ . Die kanonische Abbildung δ : V → V ∗∗ , δ(v)(φ) = φ(v) ist
injektiv und da die Dimensionen von V und V ∗∗ gleich sind, eine lineare
Bijektion. Sei δ−1 die Umkehrabbildung. Dann ist
v1 = δ−1 (φ∗1 ), . . . , vn = δ−1 (φ∗n ) eine Basis von V so dass
1
φi (v j ) =
0
i = j,
i , j.
Für i = (i1 , . . . , ik ) mit 1 ≤ i1 < · · · < ik ≤ n sei λi = ω(vi1 , . . . , vik ). Schreibe
φi = φi1 ∧ · · · ∧ φik sowie vi = (vi1 , . . . , vik ). Man sieht durch Einsetzen der
Basisvektoren leicht ein, dass
ω=
X
i=(i1 ,...,ik )
1≤i1 <···<ik ≤n
λ i φi .
Analysis 3
112
Wegen φi (v j ) = δi, j ist die Darstellung außerdem eindeutig und damit
ist die Proposition bewiesen.
Gemäß dieser Proposition schreibt man auch
Vk
V ∗ statt Altk V.
Lemma 6.3.4. Sei T : V → V eine lineare Abbildung. Für ω ∈ Altk V sei
T∗ ω(v1 , . . . , vk ) = ω(Tv1 , . . . , Tvk ).
Ist n = dim V, so ist Altn V eindimensional und es gilt T∗ ω = det(T) ω für
ω ∈ Altn V.
Beweis. Sei α1 , . . . αn eine Basis des Dualraums und v1 , . . . , vn eine Basis
von V. Sei ω = α1 ∧ · · · ∧ αn und sei B die Matrix α j (vi ) , dann gilt
i, j
det(B) = ω(v1 , . . . , vn ). Sei A = (ai, j ) die Matrix von T in der Basis v j ,
P
P
dann gilt Tvi = k ak,i vk . Also ist α j (Tvi ) = k ak,i α j (vk ). Damit
T∗ ω(v1 , . . . , vn ) = det(AB) = det(A)ω(v1 , . . . , vn ).
Satz 6.3.5. Es gibt genau eine bilineare Abbildung
Altk V × Altl V → Altk+l V
(ω, σ) 7→ ω ∧ σ
mit
(ψ1 ∧ · · · ∧ ψk ) ∧ (η1 ∧ · · · ∧ ηl ) = ψ1 ∧ · · · ∧ ψk ∧ η1 ∧ · · · ∧ ηl
für alle ψ j , η j ∈ V ∗ .
Beweis. Definiere diese Abbildung auf der Basis nach Proposition 6.3.3
und setze bilinear fort.
Analysis 3
113
Definition 6.3.6. Sei M eine glatte n-dimensionale Mannigfaltigkeit.
Eine k-Differentialform oder k-Form ω auf M ist eine Abbildung
ω:M→
[
Altk (Tp M),
p 7→ ωp ,
p∈M
mit ωp ∈ Altk (Tp M), die stetig ist in folgendem Sinne: Für beliebige
Vektorfelder X1 , . . . , Xk ist die Abbildung M → R,
p 7→ ωp (X1 , . . . , Xk )
stetig. Ist diese Abbildung stets glatt, wenn die Vektorfelder X1 , . . . , Xk
glatt sind, so sagt man, dass die Form ω glatt ist. Man schreibt Ωk (M)
für den Vektorraum der glatten k-Formen auf M.
Beispiel 6.3.7. Im Fall k = 1 ist ωp ∈ Alt1 (Tp M) einfach eine lineare
Abbildung ωp : Tp M → R. Ist nun f : M → R eine glatte Funktion, dann
ist das Differential D f eine lineare Abbildung D f : Tp M → T f (p) R. Der
Vektorraum T f (p) R wird erzeugt von
∂
∂x ,
also kann T f (p) R =
∂
∂x R
R
kanonisch mit R identifiziert werden. Mit anderen Worten: D f kann als
lineare Abbildung D f : Tp M → R, also als Differentialform aufgefasst
werden. Zur Unterscheidung wird diese Abbildung als d f geschrieben,
also d f : Tp M → R. Eine glatte Funktion f induziert also eine
1-Dfiierentialform d f .
Definition 6.3.8. Seien x1 , . . . , xn lokale Koordinaten um p, dann ist
eine Basis von Tp M. Schreibe die duale Basis von Tp∗ M = (Tp M)∗ als
dx1 , . . . , dxn . Dann lässt sich jede k-Form schreiben als
ω=
X
i1 <···<ik
fi dxi1 ∧ · · · ∧ dxik
∂
∂x j
Analysis 3
114
mit eindeutig bestimmten stetigen Funktionen fi1 ,...,ik = fi . Für diese gilt
!
∂
∂
fi1 ,...,ik = ω
,...,
.
∂xi1
∂xik
a) Sei f eine glatte Funktion. Das
Satz 6.3.9 (Die äußere Ableitung).
Differential d f definiert eine glatte 1-Form. In lokalen Koordinaten
x1 , . . . , xn gilt
n
X
∂f
dx j .
df =
∂x j
j=1
b) Für jede glatte k-Form ω existiert genau eine glatte k + 1-Form dω mit
ω=
X
fi dxi1 ∧ · · · ∧ xik
⇒
dω =
i
X
d fi ∧ dxi1 ∧ · · · ∧ xik .
i
c) Sind ω ∈ Ωk , η ∈ Ωl , so gilt
d(ω ∧ η) = dω ∧ η + (−1)k ω ∧ dη.
d) Für jedes ω ∈ Ωk (M) gilt d(dω) = 0.
Beweis. Die Formel in (a) ist klar nach der Definition des Differentials.
Da die Funktionen
∂f
∂x j
glatt sind, ist d f eine 1-Form.
In lokalen Koordinaten definiert man dω durch die angegebene Formel.
Für (b) ist zu zeigen, dass dω nicht von der Wahl der Koordinaten
abhängt. Zunächst werden (c) und (d) bewiesen, wobei fest gewählte
Koordinaten benutzt werden. Zu (c): sind k = l = 0 so ist die Regel
P
äquivalent zur Produktregel. Allgemein sei ω = |i|=k f j dxi ,
Analysis 3
η=
P
| j|=l
115
g j dx j , dann ist ω ∧ η =
d(ω ∧ η) =
X
=
X
P
i, j fi g j dxi
∧ dx j . Damit also
g j d fi ∧ dxi ∧ dx j + fi dg j ∧ dxi ∧ dx j
i, j
g j d fi ∧ dxi ∧ dx j + (−1)k fi dxi ∧ dg j ∧ dx j
i, j
= dω ∧ η + (−1)k ω ∧ dη.
Für (d) sei zunächst ω = f ∈ C∞ (M). Dann ist
n
n
X
X
∂f
∂2 f
dx j =
dxi ∧ dx j
d(dω) = d
∂x j
∂xi ∂x j
i, j=1
j=1
X ∂2 f
=
(dxi ∧ dx j + dx j ∧ dxi ) .
∂xi ∂x j |
{z
}
i<j
=0
Allgemein sei ω =
P
ddω = d
i fi dxi ,
X
dann ist
d fi ∧ dxi =
i
X
i
dd fi ∧dxi − d fi ∧ ddxi .
|{z}
=0
Schließlich ist ddxi = d(1 · dxi ) = d1 ∧ dxi = 0.
Nun zu (b). Ist yi ein zweites Koordinatensystem, so kann man eine
zweite äußere Ableitung d0 mit den y-Koordinaten definieren. Diese
muss dann ebenfalls (c) und (d) erfüllen. Es ist zu zeigen, dass d f = d0 f
für Funktionen f ∈ C∞ (M) gilt. Die Formel für den Koordinatenwechsel
besagt
n
X ∂x ∂
∂
i
=
∂y j
∂y j ∂xi
i=1
n
oder
X ∂y j ∂
∂
=
.
∂xk
∂xk ∂y j
j=1
Analysis 3
116
Indem man die erste Formel in die zweite einsetzt, erhält man
n
n
X ∂y j X ∂x ∂
∂
i
=
∂xk
∂xk
∂y j ∂xi
j=1
n
X
∂y j ∂x
i
oder
i=1
j=1
Für die duale Basis ergibt sich daraus dy j =
indem man
∂
∂y j
∂xk ∂y j
∂y j
i=1 ∂xi dxi ,
Pn
= δi,k .
wie man sieht,
auf der rechten Seite einsetzt und die erste Formel
benutzt. Für f ∈ C∞ (M) gilt daher
n X
n
n
X
X
∂f
∂xi ∂ f
dy j =
dy j
d f =
∂y j
∂y j ∂xi
0
j=1 i=1
n X
n
X
j=1
n
∂xi ∂ f X ∂y j
=
dxk
∂y j ∂xi
∂xk
j=1 i=1
k=1
n X
n X
n
X
X
n ∂xi ∂y j ∂ f
∂f
=
dxk =
dxi = d f.
∂y j ∂xk ∂xi
∂xi
i=1 k=1 j=1
i=1
| {z }
=δi,k
Für eine beliebigen Differentialform ω =
dω=
0
=
X
i
X
P
i fi dxi1
∧ · · · ∧ dxik gilt dann
d0 ( f j dxi1 ∧ · · · ∧ dxik )
(d0 f j )dxi1 ∧ · · · ∧ dxik + f j d0 (dxi1 ∧ · · · ∧ dxik )
i
Da d0 f j = d f j , bleibt zu zeigen d0 (dxi1 ∧ · · · ∧ dxik ) = 0 und nach (c) reicht
es, dies für k = 1 zu tun. Dann ist aber d0 dxi = d0 d0 xi = 0 und der Satz ist
vollständig bewiesen.
Analysis 3
6.4
117
Zurückziehen von Differentialformen
Sei M eine glatte Mannigfaltigkeit und sei ω eine glatte k-Form auf M,
das heisst, fuer jedes p ∈ M ist ωp ∈ Altk (Tp M), also ist
k
ωp : Tp M → R
eine alternierende Multilinearform. Sei nun F : L → M eine glatte
Abbildung zwischen glatten Mannigfaltigkeiten, dann ist das
Differential von F für q ∈ L eine lineare Abbildung
DF(q) : Tq L → TF(q) M.
Sei nun ω ∈ Ωk (M) eine Differentialform. Man definiert die
Zurückziehung von ω entlang F als die Differentialform F∗ ω ∈ Ωk (L)
durch
F∗ ω(X1 , . . . , Xk ) = ω (DF(X1 ), . . . , DF(Xk )) .
Als Spezialfall beachte, dass die lineare Abbildung DF : Tq L → TF(q) M
∗
dualisiert zu F∗ : TF(q)
M → Tq∗ L, was das Zurückziehen von 1-Formen
erklärt.
Man kann das Zurückziehen auch so schreiben:
F∗ ω = ω ◦ DF.
Ist insbesondere ω = f eine 0-Form, also eine glatte Funktion
f : M → R, so ist
F∗ f (p) = f F(p) .
Satz 6.4.1. Für eine glatte Abbildung F : L → M gilt:
Analysis 3
118
a) F∗ : Ω(M) → Ω(L) ist linear,
b) F∗ (ω ∧ η) = F∗ ω ∧ F∗ η,
c) d(F∗ ω) = F∗ dω.
Ist außerdem G : M → N glatt, so gilt (G ◦ F)∗ = F∗ ◦ G∗ .
Beweis. (a), (b) und die letzte Bemerkung sind trivial. Zum Beweis von
(c) sei ω = f eine Funktion, so ist F∗ f = f ◦ F und daher folgt aus der
Kettenregel:
d(F∗ f ) = d f ◦ dF = F∗ d f.
P
Eine beliebige k-Form schreibt man als ω = I fI dxI . Dann folgt
X
F∗ fI F∗ dxI
d(F∗ ω) = d
XI
X
∗
∗
F∗ fI d(F∗ dxI ).
=
d(F fI ) F dxI +
I
I
Da d(F∗ fI ) = F∗ (d fI ) ist die erste Summe gleich
X
I
F (d fI ) F (dxI ) = F
∗
∗
∗
X
d fI dxI = F∗ (dω).
I
Um zu zeigen, dass die zweite Summe Null ist, reicht es, zu zeigen,
Analysis 3
119
dass der Faktor d(F∗ dxI ) gleich Null ist. Dieser Faktor ist gleich
d(F∗ (dxi1 ∧ · · · ∧ dxik )) = d(F∗ dxi1 ∧ · · · ∧ F∗ dxik )
= d(dF∗ xi1 ∧ · · · ∧ dF∗ xik )
k
X
=
(−1)ν+1 dF∗ xi1 ∧ · · · ∧ ddF∗ xiν ∧ · · · ∧ dF∗ xik = 0.
| {z }
ν=1
=0
Analysis 3
7
120
Der Satz von Stokes
7.1
Orientierung
Im Riemann-Integral gibt es eine Integrationsrichtung, ein Umstand,
der für die Gültigkeit des Hauptsatzes der Differential- und
Integralrechnung von essentieller Bedeutung ist. Im
höherdimensionalen wird die Richtung durch den Begriff der
Orientierung ersetzt. Sind v1 , . . . , vn und w1 , . . . wn zwei Basen eines
reellen Vektorraums, dann wird durch die Vorschrift Av j = w j eine
invertierbare lineare Abbildung A auf V definiert. Man sagt, dass die
Basen gleich orientiert sind, falls det(A) > 0 gilt. Die Gleichorientiertheit
ist eine Äquivalenzrelation auf der Menge der Basen von V, welche in
zwei Äquivalenzklassen zerfällt. Diese Äquivalenzklassen nennt man
die Orientierungen von V.
Beispiele 7.1.1.
• Auf R gibt es die Orientierung die durch 1
gegeben ist und die durch −1.
• Auf R2 sind die Orientierungen einmal durch die Standardbasis:
e1 , e2 und durch −e1 , e2 gegeben. Beachte, dass −e1 , −e2 die gleiche
Orientierung hat wie die Standardbasis.
Sei n ∈ N. Die Menge GLn (R) aller invertierbaren reellen n × n Matrizen
trägt eine natürliche Topologie als Teilmenge der Menge aller n × n
2
Matrizen Mn (R) Rn . Die Determinantenabbildung det : Mn (R) → R
ist ein Polynom in den Matrixeinträgen und daher eine stetige
Abbildung. Die Menge GLn (R) ist das Urbild von R× unter der
Determinantenabbildung und daher ist GLn (R) eine offene Teilmenge
von Mn (R). Sie zerfällt in zwei Zusammenhangskomponenten GL+n (R)
und GL−n (R), wobei GL+n (R) die Menge aller Matrizen mit strikt
Analysis 3
121
positiver Determinante ist und GL−n (R) die Menge der Matrizen mit
strikt negativer Determinante.
Sei nun V ein n-dimensionaler reeller Vektorraum und sei BAS(V) die
Menge aller Basen von V. Sei eine Basis A von V fixiert. Ist dann B
eine zweite Basis, erhält man eine Basiswechselmatrix MAB und die
Abbildung
BAS(V) → GLn (R),
B 7→ MAB
ist eine Bijektion. Wählt man eine andere Referenzbasis A 0 , so
multipliziert sich die Abbildung mit der invertierbaren
Basiswechselmatrix MAA , so dass die durch diese Bijektion auf BAS(V)
0
induzierte Topologie nicht von der Wahl der Basis A abhängt.
Insbesondere zerfällt dann BAS(V) in zwei
Zusammenhangskomponenten, BAS(V) = BAS(V)A ∪· BAS(V)cA , wobei
BAS(V)A die Menge aller Basen ist, die dieselbe Orientierung wie A
haben.
Die Menge OR(V) aller Orientierungen auf V hat zwei Elemente und es
gibt eine natürliche stetige Abbildung BAS(V) → OR(V), die jeder Basis
ihre Orientierungsklasse zuordnet. Nach Wahl einer festen
Referenzbasis wird diese Abbildung gerade die Abbildung
GLn (R) → {±1}, die jeder Matrix das Vorzeichen ihrer Determinante
zuordnet.
Lemma 7.1.2. Ist φ : X → BAS(V) eine stetige Abbildung, wobei X ein
zusammenhängender topologischer Raum ist, dann ist die induzierte
Abbildung X → OR(V) konstant.
Beweis. Die beiden Orientierungsklassen in BAS(V) sind genau die
Zusammenhangskomponenten.
Ist x j ein lokales Koordinatensystem, so liefert die Basis
∂
∂x1
. . . , ∂x∂n eine
Analysis 3
122
Orientierung von Tp M für jedes p aus dem Definitionsbereich der Karte.
Zwei Karten heißen gleich orientiert, wenn sie in jedem Punkt p dieselbe
Orientierung in Tp M induzieren. Ein glatter Atlas heißt orientiert, wenn
je zwei Karten gleich orientiert sind. Eine glatte Mannigfaltigkeit heißt
orientierbar, wenn sie einen orientierten Atlas besitzt. Ist M orientierbar
und zusammenhängend, so gibt es genau zwei maximale orientierte
Atlanten, die beiden Orientierungen auf M. Eine Mannigfaltigkeit M mit
einer Orientierung σ nennt man eine orientierte Mannigfaltigkeit. Eine
Karte die zu σ gehört nennt man positiv orientiert, andernfalls ist sie
negativ orientiert.
Man kann die Angabe einer Orientierung auch so verstehen, dass man
für jedes p ∈ M eine Orientierung σp auf dem Tangentialraum Tp M
angibt, so dass σp stetig von p abhängt.
Beispiele 7.1.3.
• Die Mannigfaltigkeiten Rn und Sn sind
orientierbar. Auf Rn gibt es eine standard-Orientierung, die durch
die standard-Basis e1 , . . . , en gegeben ist. Eine Basis v1 , . . . , vn von
Rn heißt positiv orientiert, falls sie dieselbe Orientierung wie (e j )
besitzt. Eine Basis (v j ) ist genau dann positiv orientiert, wenn ihre
Determinante positiv ist, also wenn det(v1 , . . . , vn ) > 0.
• Nicht orientierbar ist das Möbiusband:
M = (R × (−1, 1)) /Z,
wobei die Gruppe Z operiert durch k(x, y) = (x + k, (−1)k y). Das hat
den Grund darin, dass die Abbildung (x, y) 7→ (x + 1, −y)
Orientierungen umkehrt. Es ist allerdings zu zeigen, dass das
Möbiusband als Teilmenge des RN dargestellt werden kann. Dies
Analysis 3
123
ist mit N = 3 möglich. Die Abbildung φ : M → R3 ,
2 cos(2πx) + y sin(πx) cos(2πx)
φ(x, y) = 2 sin(2πx) + y sin(πx) sin(2πx)
y cos(πx)
ist ein Homöomorphismus von M auf eine eingebettete
Mannigfaltigkeit im R3 . Der Nachweis sei dem Leser überlassen,
wobei empfohlen wird, eine Zeichnung zu anzufertigen und
φ(x, y) als Matrixprodukt in der Form
cos(2πx) − sin(2πx) 0 2 + y sin(πx)
sin(2πx) cos(2πx) 0
0
0
0
1 y cos(πx)
zu schreiben.
Sei U der Definitionsbereich der lokalen Koordinaten x j . Eine n-Form ω
lässt sich auf U schreiben als
ω = f dx1 ∧ · · · ∧ dxn .
Setze
Z
Z
ωB
Rn
U
f (x) dx1 . . . dxn ,
| {z }
=Lebesgue-Maß
falls das Integral existiert.
Proposition 7.1.4. Sei φ : U → V ein Diffeomorphismus und sind U, V
Definitionsbereiche glatter Koordinatensysteme xi , yi , so gilt
Z
Z
ω=
φ∗ ω,
V
U
falls φ die Orientierung von xi in die von yi überführt. Kehrt φ die
Analysis 3
124
Orientierungen um, so gilt
Z
Z
ω=−
φ∗ ω.
V
U
Insbesondere hängt die Definition von
sondern nur von U und ω ab.
R
U
ω nicht von der Wahl der Karte,
Beweis. Nach Lemma 6.3.4 gilt φ∗ ω = f ◦ φ det(Dφ)dx1 ∧ · · · ∧ dxn , wenn
man det Dφ erklärt durch die beiden Basen
∂
∂x
and
∂
∂y
von Tp M und
Tφ(p) M. Damit folgt die Behauptung aus der Transformationsformel.
Das Integral über eine n-Form kann also nur sinnvoll definiert werden,
wenn M orientierbar ist und eine Orientierung gewählt wurde.
Definition 7.1.5. Sei ω eine n-Form auf der orientierten
Mannigfaltigkeit M. Wie bei Funktionen definiert man den Träger von ω
als den Abschluss der Menge
p ∈ M : ω(p) , 0
in M. Nimm nun an, dass ω kompakten Träger K hat, mit K ⊂ U für eine
orientierte Karte (φ, U). Dann ist
Z
Z
ω=
M
ω
U
wohldefiniert. Das Integral existiert, da ω kompakten Träger hat.
Ohne die Trägerbedingung braucht man eine Teilung der Eins.
7.2
Teilung der Eins
Eine Teilung der Eins erlaubt es, eine Differentialform ω als Summe von
Formen ω j zu schreiben, die jeweils Träger in Kartenumgebungen
Analysis 3
125
haben. Dann kann man das Integral über ω als die Summe der Integrale
der ω j definieren.
Lemma 7.2.1. Sei M eine Mannigfaltigkeit. Es gibt eine Folge offener, relativ
kompakter Mengen G j mit
G j ⊂ G j+1
und
M=
[
G j.
j
Beweis. Die Topologie von RN wird erzeugt von den abzählbar vielen
offenen Bällen
B1/n (q),
wobei q ∈ QN und n ∈ N. Daher wird die Topologie von M erzeugt von
den abzählbar vielen offenen Mengen
Wq,n = B1/n (q) ∩ M,
wobei es reicht, solche Paare q, n zu betrachten, so dass Wq,n relativ
kompakt ist in M. Ordne diese Mengen in einer Folge U1 , U2 , . . . . Die
Folge G j wird induktiv konstruiert. Sei G1 = U1 und sei
G j = U1 ∪ · · · ∪ Ul bereits konstruiert. Sei k der kleinste Index
k > max(l, j) mit G j ⊂ U1 ∪ · · · ∪ Uk . Dann setze G j+1 = U1 ∪ · · · ∪ Uk .
Dann erfüllt die Folge G j die Bedingungen.
Satz 7.2.2 (Teilung der Eins). Sei M eine glatte Mannigfaltigkeit und es
sei (Ui )i∈I eine offene Überdeckung von M. Dann existieren glatte
Funktionen ui : M → [0, 1], so dass der Träger von ui ganz in Ui liegt und
dass gilt
X
i∈I
ui ≡ 1
Analysis 3
126
auf ganz M, wobei die Summe lokal endlich ist, d.h. für jedes p ∈ M gibt es
eine offenen Umgebung U, so dass die Menge
n
o
i ∈ I : ui |U , 0
endlich ist. Es folgt, dass für jede kompakte Teilmenge K ⊂ M die Menge
n
o
i ∈ I : ui |K , 0
endlich ist. Man nennt die Familie (ui ) eine Teilung der Eins zur
Überdeckung (Ui ).
Beweis. In Lemma 7.2.1 wurde die Existenz einer Folge G j offener,
relativ kompakter Teilmengen von M mit
G j ⊂ G j+1
und
M=
[
Gj
j
bewiesen. Für p ∈ M sei ip die größte ganze Zahl so dass p < Ḡip . Wähle
αp so dass p ∈ Uαp und sei (τ, V) eine Karte um p so dass τ(p) = 0 und
V ⊂ Uαp ∩ (Gip +2 \ Ḡip ). Sei φ eine glatte Funktion auf Rn die Eins ist auf
dem abgeschlossenen Ball um Null mit Radius 1 und Null außerhalb
des Balls mit Radius 2, welche nach Lemma 6.2.4 existiert. Setze
φ ◦ τ on V
ψp =
0
sonst.
Dann ist ψp eine glatte Funktion auf M, die konstant gleich 1 ist auf
einer offenen Umgebung Wp von p und die kompakten Träger hat, der
in V ⊂ Uαp ∩ (Gip +2 \ Gip ) liegt. Für jedes i ≥ 1 wähle eine endliche Menge
von Punkten p in M, so dass die Wp -Umgebungen die Menge Ḡi \ Gi−1
Analysis 3
127
überdecken. Ordne die entsprechenden ψp -Funktionen in einer Folge
(ψ j ) j≥1 . Die Träger der ψ j bilden eine lokal-endliche Überdeckung von
P
M, also ist die Funktion ψ = j≥1 ψ j eine wohldefinierte glatte Funktion
auf M und es gilt ψ(p) > 0 für jeden Punkt p ∈ M. Die Funktionen
P
ψ
u j = ψj sind glatt und erfüllen j u j = 1. Für jedes j ≥ 1 wähle nun ein
i ∈ I, so dass der Träger von u j in Ui liegt und nenne dieses u j dann ui .
Enthält ein Ui die Träger mehrerer u j , dann kann man diese u j durch
ihre Summe ersetzen. Für die i ∈ I, die kein ui abgekriegt haben, setzt
man schließlich ui ≡ 0. Die Behauptung folgt.
Sei nun ω eine n-Form auf der orientierten Mannigfaltigkeit M und sei
(Ui ) eine Überdeckung durch Kartenumgebungen. Sei (ui ) eine Teilung
der Eins zu dieser Überdeckung. Dann hat für i ∈ I die Form ui ω
kompakten Träger in einer Kartenumgebung Ui und damit existiert
R
u ω.
M i
Lemma 7.2.3. Hat die Form ω kompakten Träger in der orientierten
PR
Mannigfaltigkeit M, dann konvergiert die Summe i M ui ω absolut. Ihr Wert
wird als Integral von ω definiert:
Z
XZ
ui ω.
ωB
M
M
j
Das Integral hängt nicht von der Wahl der Überdeckung oder der Teilung der
Eins ab.
Beweis. Seien zwei Kartenüberdeckungen (Ui ) und (V j ) gegeben und
seien (ui ) und (v j ) Teilungen der Eins zu U bzw. V. Dann gilt für i ∈ I,
ωi = u i ω =
X
v j ui ω.
j
Sei K der (kompakte) Träger von ω, dann gibt es nur endlich viele i mit
Analysis 3
128
ui ω , 0 und ebenso für j. In der folgenden Rechnung sind also immer
nur endlich viele Summanden , 0:
XZ
XXZ
XXZ
XZ
ωi =
v j ui ω =
ui v j ω =
ω j.
i
M
i
j
M
j
M
i
j
Beachte, dass das Integral von der gewählten Orientierung von M
abhängt. Ist M̄ dieselbe Mannigfaltigkeit mit der entgegengesetzten
Orientierung, so gilt
Z
Z
ω=−
ω.
M̄
M
Auf Rn wählt man die Standard-Orientierung, d.h., die Orientierung
der Basis e1 , . . . , en .
Lemma 7.2.4. Sei M eine kompakte, orientierte Mannigfaltigkeit der
Dimension n und sei ω ∈ Ωn (M). Sei (φ, U) eine positiv orientierte Karte.
Nimm an, dass eine Untermannigfaltigkeit K der Dimension < n existiert, so
dass M = U ∪ K, d.h. die Karte U deckt M ab bis auf einen Rest kleinerer
Dimension. Dann gilt
Z
Z
ω=
M
ω,
U
wobei das Integral rechts absolut konvergiert, auch wenn der Traeger von ω
nicht in U enthalten ist.
Beweis. Fuer j ∈ N sei A j eine offene Teilmenge von M so dass
T
K ⊂ A j+1 ⊂ A j ⊂ M fuer jedes j gilt und dass j A j = K ist. (Um die
Existenz einer solchen Folge zu zeigen, erinnere, dass M ⊂ RN fuer ein
N ∈ N. Waehle dann A j als die 1/ j-Umgebung von K in RN geschnitten
mit M.)
Sei dann (U j,i )i∈I j ein orientierter Atlas von A j . Dann ist (U, (U j,i )i∈I j ) ein
orientierter Atlas von M. Sei (u j , (u j,i )) eine unterliegende Zerlegung der
Analysis 3
129
Eins, dann gilt
Z
Z
ω=
M
u jω +
U
XZ
i∈I j
u j,i ω.
U j,i
Mit j → ∞ konvergiert nun
R
u
ω
−→
ω,
U j
U
P R
(ii) i∈I j U u j,i ω −→ 0.
(i)
R
j,i
Beide Aussagen sind eine Folge des Satzes ueber dominierte
Konvergenz. Das Lemma folgt.
Beispiele 7.2.5.
• Sei M = S1 = {x ∈ R2 : ||x|| = 1} und sei ω die 1-Form
ω(e2πit ) = η(t)dt,
wobei η : R → R glatt und periodisch ist. Ferner sei M mit der
Orientierung durch das Vektorfeld X versehen, wobei
R
R1
X f (e2πit ) = ∂t∂ f (e2πit ). Dann gilt M ω = 0 η(t) dt.
• Sei wieder M = S1 und seien ω und η die 1-Formen auf R2 C
gegeben durch
ω = xdy,
Sei dann ψ : (0, 1) → S , t 7→ e
1
2πit
η = xdx.
=
cos(2πt)
.
sin(2πt)
Es gilt
R
S1
ω=
R1
0
ψ∗ ω
Analysis 3
130
und ebenso fuer η. Wir rechnen
!
!!
∂
∂
ψ∗ ω t
= ωψ(t) Dψt
∂t
∂t
=
−2π sin(2πt)
ω cos(2πt)
2π cos(2πt)
sin(2πt)
= ω
cos(2πt)
sin(2πt)
!
∂
∂
−2π sin(2πt) + 2π cos(2πt)
∂x
∂y
!
= cos(2πt) 2π cos(2πt) = 2π cos(2πt)2 .
So dass
Z
1
Z
ω = 2π
cos(2πt)2 dt = π.
S1
0
Ebenso rechnet man
!
∂
ψ∗ ηt
= −2π cos(2πt) sin(2πt),
∂t
so dass
Z
Z
η = −2π
S1
7.3
1
cos(2πt) sin(2πt) dt = 0.
0
Orientierung von Hyperflächen
Sei M ⊂ RN eine Mannigfaltigkeit. Ein Normalenfeld auf M ist eine
stetige Abbildung
ν : M → RN
so dass für jeden Punkt p ∈ M der Vektor ν(p) ein Normalenvektor ist,
d.h. senkrecht auf Tp M steht und die Länge 1 hat.
Ist M eine Hyperfläche, d.h. ist dim(M) = N − 1 und hat M eine
Orientierung, so heißt ein Normalenfeld ν positiv orientiert, wenn für
Analysis 3
131
jedes p ∈ M folgendes gilt: Ist v1 , . . . , vN−1 eine positiv orientierte Basis
von Tp M, so ist ν(p), v1 . . . , vN−1 eine positiv orientierte Basis von RN ,
d.h.
det ν(p), v1 . . . , vN−1 > 0.
Satz 7.3.1. Sei M ⊂ RN eine Hyperfläche.
a) Besitzt M eine Orientierung σ, so existiert genau ein Normalenfeld
ν : M → RN , das positiv orientiert bezüglich σ ist.
b) M besitze ein Normalenfeld ν. Dann existiert genau eine
Orientierung σ auf M bezüglich der ν positiv orientiert ist.
Beweis. (a) Für linear unabhängige Vektoren v1 , . . . , vN−1 ∈ RN gibt es
genau einen Vektor w ∈ RN so dass w senkrecht steht auf allen v j und
dass det(w, v1 , . . . , vN−1 ) = 1. Nenne diesen Vektor w = w(v1 , . . . , vN−1 ).
Sei S ⊂ (RN )N−1 die Menge aller Tupel (v1 , . . . , vN−1 ) die linear
unabhängig sind. Man versieht S mit der Teilraum-Topologie als
Teilmenge von RN(N−1) . Nach dem Satz über implizite Funktionen ist
die Abbildung w : S → RN glatt. Sind x1 , . . . , xN−1 lokale Koordinaten
auf M, die positiv orientiert sind, dann setze für p im Definitionsbereich
der Koordinaten
!
∂
∂
|p , . . . ,
|p .
W(p) = w
∂x1
∂xN−1
Dann ist die Abbildung W : M → RN glatt, nirgends verschwindend
und es gilt ν(p) =
1
W(p).
W(p)
|| ||
(b) Sei ν ein Normalenfeld. Die Menge der glatten Karten, deren
Analysis 3
132
Koordinaten x1 , . . . , xN−1 die Bedingung
det(ν(p),
∂
∂
,...,
)>0
∂x1
∂xN−1
erfüllen, definiert eine Orientierung auf M.
Beispiel 7.3.2. Sei M ⊂ RN eine glatte Hyperfläche. Es gebe eine relativ
kompakte offenen Menge A ⊂ RN , so dass M der Rand von A ist. Dann
ist das äußere Normalenfeld ν definiert durch
• ν(p) steht senkrecht auf Tp M,
• ν(p) = 1,
• es gibt ein ε > 0 so dass für 0 < t < ε gilt: p + tν(p) < A.
Integral über Teilmengen
Ist A ⊂ M eine relativ kompakte messbare Teilmenge, so kann man
R
wie folgt definieren. Ist (φ, U) eine positiv orientierte Karte und der
Träger von ω in U enthalten, so definiert man
Z
Z
ω=
f (x) dx1 . . . dxn ,
φ(A∩U)
A
wobei x1 , . . . , xn das lokale Koordinatensystem von φ ist. Allgemein
wählt man eine Überdeckung durch positiv orientierte Karten, eine
unterliegende Teilung der Eins (ui ) und definiert
Z
XZ
ω=
ui ω.
A
i
A
A
ω
Analysis 3
7.4
133
Der Stokessche Satz für den Rn
Der Integralsatz von Stokes ist die Verallgemeinerung des Hauptsatzes
der Infinitesimalrechnung und er hat für die mehrdimensionale
Analysis auch eine ähnlich grundlegende Bedeutung wie der
Hauptsatz für die eindimensionale Theorie.
Sei H der Halbraum aller x ∈ Rn mit x1 ≤ 0. Für eine kompakte
Teilmenge A des Rn sagt man, dass A einen glatten Rand hat, falls es zu
jedem Punkt von ∂A eine offene Menge U ⊂ Rn gibt und einen
Diffeomorphismus φ : U → Rn gibt, so dass φ(A ∩ U) = H. Man nennt φ
eine Randkarte von A. Man beachte, dass fuer z ∈ U gilt, dass z genau
dann ein Randpunkt von A ist, wenn φ(z) ein Randpunkt von φ(A) = H
ist. Dies sieht man leicht ein, indem man beachtet, dass φ ein
Homoeomorphismus ist und dass z genau dann ein Randpunkt ist,
wenn z sowohl Limes einer Folge in A als auch Limes einer Folge in
Rn r A ist.
Satz 7.4.1 (Stokes). Sei ω eine stetig partiell differenzierbare (n − 1)-Form
auf Rn mit kompaktem Träger. Sei A eine Teilmenge von Rn mit glattem
Rand, so gilt
Z
Z
dω =
A
∂A
ω,
wobei der Rand ∂A die durch das äußere Normalenfeld aus Beispiel 7.3.2
gegebene Orientierung trägt.
Für n = 1 wird dieser Satz gerade der Hauptsatz der
Analysis 3
134
Infinitesimalrechnung
b
Z
f 0 (x) dx = f (b) − f (a).
a
Beweis des Satzes. Der Rand ∂H von H ist die Hyperfläche x1 = 0. Das
äußere Normalenfeld ist ν(x) = e1 der erste Standard-Basisvektor. Der
Rand ∂H hat eine globale Karte φ : H → Rn−1 gegeben durch
φ(0, x2 , . . . , xn )t = (x2 , . . . , xn )t . Die Orientierung durch das äußere
Normalenfeld stimmt mit der dieser Karte überein. Sei
β = φ−1 : Rn−1 → ∂H.
Lemma 7.4.2. Sei ω ∈ Ωn−1 (Rn ) mit kompaktem Träger. Dann gilt
Z
Z
dω =
(a)
H
∂H
ω,
Z
dω = 0.
(b)
Rn
Beweis. (a) Schreibe ω als
n
X
cj ∧ · · · ∧ dxn .
ω=
(−1) j−1 f j dx1 ∧ · · · ∧ dx
j=1
Es folgt β∗ ω = f1 (0, t1 , . . . , tn−1 )dt1 ∧ · · · ∧ dtn−1 . Also
Z
Z
ω=
f1 (0, t1 , . . . , tn−1 )dt1 . . . dtn−1 .
∂H
Rn−1
P ∂f
Auf der anderen Seite ist dω = nj=1 ∂xjj dx1 ∧ · · · ∧ dxn . Ferner gilt die
R 0 ∂f
Gleichung −∞ ∂x11 (x1 , . . . , xn ) dx1 = f1 (0, x2 , . . . , xn ), also
Z
H
∂ f1
(x1 , . . . , xn ) dx1 . . . dxn =
∂x1
Z
f1 (0, x2 , . . . , xn ) dx2 . . . dxn .
Rn−1
Analysis 3
135
Für 2 ≤ j ≤ n gilt
Z
H
∂ fj
∂x j
Z
∂ fj
Z
dx1 . . . dxn = ±
R− ×Rn−2
R
∂x j
Da f kompakten Träger hat, ist das Integral
!
cj . . . dxn .
dx j dx1 . . . dx
∂ fj
R ∂x j
R
dx j nach dem
Hauptsatz gleich Null, also verschwinden die Beiträge zu j ≥ 2. Es folgt
Z
Z
Z
ω=
f1 (0, x2 , . . . , xn ) dx2 . . . dxn =
ω.
∂ fj
j=1 ∂x j dx1
Pn
(b) Es gilt dω =
∂H
Rn−1
H
∧ · · · ∧ dxn und es ist
Z
dω =
n Z
X
Rn
j=1
∂ fj
Z
...
R
R
∂x j
dx1 . . . dxn ,
wobei nun nach einem Satz der Analysis 2 die Reihenfolge der
Integrale beliebig ist. Integrieren wir zuerst nach dx j , dann ist aber, da f j
kompakten Traeger hat, nach dem Hauptsatz der
R ∂ fj
Infinitesimalrechnung: R ∂x j dx j = 0.
Der Satz folgt nun leicht aus dem Lemma: Seien (φi , Ui ) Randkarten, so
dass die Ui den Rand von A überdecken. Erweitere die Familie um
Karten vom Inneren A \ ∂A. All diese Karten können positiv orientiert
gewählt werden. Sei ui eine unterliegende Teilung der Eins auf A. Dann
gilt
Z
dω =
A
XZ
i
A
d(ui ω) =
XZ
i
∂A
Z
ui ω =
∂A
ω.
Analysis 3
7.5
136
Holomorphe Funktionen
In der komplexen Analysis werden holomorphe Funktionen als
Funktionen definiert, die in einer offenen Menge komplex
differenzierbar sind. Eine holomorphe Funktion ist also eine Funktion
f : U → C, wobei U ⊂ C eine offene Teilmenge ist, so dass für jedes
z ∈ U der Limes
f (z + h) − f (z)
h→0
h
existiert. Hierbei sind nur komplexe h , 0 zugelassen, die klein genug
f 0 (z) = lim
sind, so dass z + h auch in U liegt. In der komplexen Analysis zeigt
man, dass aus Holomorphie bereits unendliche reelle
Differenzierbarkeit folgt. Der dazu erforderliche Aufwand soll hier
nicht getrieben werden, so dass ab jetzt vorausgesetzt wird, dass f auch
stetig partiell differenzierbar ist.
Beispiel 7.5.1. Ist f (z) =
PN
j=0 a j z
j
eine Funktion, dann ist f in ganz C
holomorph, denn der Differenzenquotient
N
X
f (z + h) − f (z) 1
j
j
=
a j (z + h) − z
h
h
j=0
!
!
j−1
j−1
N
N
X
X
X
X
j k j−k
j k j−k−1
1
=
zh
aj
z h =
aj
h
k
k
j=0
j=0
k=0
k=0
ist ein D in h.
Lemma 7.5.2. Ist f im Punkt z differenzierbar, so ist f im Punkt z stetig.
Beweis. Da der Limes existiert, gibt es C, ε > 0 so dass für jedes h ∈ C
mit |h| < ε gilt
f (z + h) − f (z) < C.
h
Analysis 3
137
Dann gilt also für kleine h, dass | f (z + h) − f (z)| < Ch, woraus die
Stetigkeit folgt.
Satz 7.5.3 (Cauchy-Riemann Differentialgleichungen). Sei f
holomorph in einer offenen Menge U. Schreibe
f (z) = u(x, y) + iv(x, y)
für Real- und Imaginärteil von f . Dann existieren die partiellen
Ableitungen ux , u y , vx , v y im Punkt z und es gilt
ux = v y ,
u y = −vx .
Beweis. Die Ableitung ist gegeben als
f 0 (z) = lim
h→0
f (z + h) − f (z)
.
h
Also gilt
!
u(x
+
h,
y)
−
u(x,
y)
v(x
+
h,
y)
−
v(x,
y)
f 0 (z) = lim
+i
= ux + ivx
h→0
h
h
h∈R
und
f 0 (z) = lim
h→0
h=ik∈iR
!
u(x, y + k) − u(x, y) v(x, y + k) − v(x, y)
1
+
= uy + vy.
ik
k
i
Da diese beiden Ausdrücke gleich sind, folgt iux − vx = u y + iv y . Der
Vergleich von Real-und Imaginärteil liefert die Behauptung.
Korollar 7.5.4. Die Cauchy-Riemannschen Differentialgleichungen lassen
sich auch in einer Gleichung wie folgt ausdrücken. Sei f in der offenen Menge
Analysis 3
138
U ⊂ C holomorph, dann gilt
∂f
= 0,
∂z̄
!
∂
1 ∂
∂
wobei
=
+i
.
∂z̄ 2 ∂x
∂y
Beweis. Durch Vergleich von Real- und Imaginärteil sieht man, dass
diese Formel äquivalent ist zu den Cauchy-Riemann Gleichungen.
Beispiel 7.5.5. Die Funktion f (z) = |z| ist in keinem Punkt von D = C
komplex differenzierbar. Um dies einzusehen, beachte
q
u(x, y) = x2 + y2 ,
v(x, y) = 0.
Dann gilt vx = v y = 0 und für (x, y) , (0, 0) gilt
ux = p
x
x2
+
y2
,
uy = p
y
x2
+
y2
,
so dass die Cauchy-Riemann-Gleichungen nicht erfüllt sind für z , 0.
Im Punkt z = 0 sieht man, dass der Ausdruck
f (h) − f (0) |h|
=
h
h
nicht konvergiert, wenn h → 0.
Definition 7.5.6. Eine stetig partiell differenzierbare Form ω heißt
geschlossen, falls dω = 0. Eine C-wertige Differentialform ist eine Form
der Gestalt ω = ω1 + iω2 , wobei ω1 und ω2 Differentialformen mit
Werten in R sind. Dann ist also ωp eine alternierende R-multilineare
Abbildung von (Tp M)k nach C.
Lemma 7.5.7. Ist f holomorph auf U und ist f stetig partiell differenzierbar,
dann ist die 1-Form ω = f (z)dz geschlossen, wobei das Differential dz als
dx + idy definiert wird.
Analysis 3
139
Beweis. Es ist
dω = d( f dx + i f dy) = (−
∂f
∂f
∂f
+ i )dx ∧ dy = 2i dx ∧ dy = 0
∂y
∂x
∂z̄
Lemma 7.5.8. Sei U ⊂ Rn offen, a ∈ U und ω eine in U \ {a} geschlossene
(n − 1)-Form. Seien A, B ⊂ U zwei Kompakta mit glattem Rand, so dass
a ∈ Å ∩ B̊. Dann gilt
Z
Z
∂A
ω=
∂B
ω.
Beweis. Sei ε > 0 so klein, dass
Kε = {x ∈ Rn : ||x − a|| ≤ ε} ⊂ Å ∩ B̊.
Setze Aε = A \ K̊ε und Bε = B \ K̊ε . Dann sind Aε und Bε Kompakta mit
glattem Rand, die in U \ {a} enthalten sind. Da dω = 0, folgt aus dem
Satz von Stokes:
Z
Z
∂Aε
ω=
∂Bε
ω = 0.
Der Rand von Aε besteht aus dem Rand von A und dem negativ
orientierten Rand von Kε . Ebenso besteht der Rand von Bε aus dem
Rand von B und dem negativ orientierten Rand von Kε . Damit folgt
Z
Z
Z
Z
ω−
ω=
ω−
ω,
∂A
∂Kε
∂B
∂Kε
also die Behauptung.
Für a ∈ U ist z.B. die Funktion z 7→
ω=
f (z)
z−a dz
werden.
f (z)
z−a
holomorph in U \ {a}, also ist
geschlossen. Damit kann das letzte Korollar angewendet
Analysis 3
140
Satz 7.5.9 (Cauchysche Integralformel). Sei U ⊂ C offen, f : U → C
eine holomorphe und stetig partiell differenzierbare Funktion und A ⊂ U
ein Kompaktum mit glattem Rand. Dann gilt für jeden Punkt a ∈ Å
Z
f (z)
1
f (a) =
dz.
2πi ∂A z − a
Beweis. Nach dem Korollar gilt für jedes hinreichend kleine ε > 0
Z
Z
Z
f (z)
f (z)
1
dz =
dz = 2
(z̄ − ā) f (z) dz.
z
−
a
z
−
a
ε
∂A
|z−a|=ε
|z−a|=ε
Auf das letzte Integral wird der Satz von Stokes angewendet. Da die
Form f (z)dz geschlossen ist, folgt
d((z̄ − ā) f (z) dz) = d(z̄ − ā) ∧ f (z)dz = f (z)dz̄ ∧ dz.
Es ist
dz̄ ∧ dz = (dx − idy) ∧ (dx + idy) = 2idx ∧ dy,
so dass folgt
Z
Z
Z
f (z)
1
1
1
dz =
f (a + εζ) dξ ∧ dη,
f (z)dx ∧ dy =
2πi ∂A z − a
π |ζ|≤1
πε2 |z−a|≤ε
wobei ζ = ξ + iη die Zerlegung in Real- und Imaginärteil ist. Da π der
Flächeninhalt der Kreisscheibe vom Radius 1 ist und f stetig ist, geht
das letzte Integral für ε → 0 gegen f (a). Andererseits hängt die rechte
Seite gar nicht von ε ab, also folgt die Behauptung.
Analysis 3
7.6
141
Poincaré Lemma
Eine Form ω heißt exakt, falls es eine Form η gibt, so dass dη = ω. Jede
exakte Form ist geschlossen, aber es gibt geschlossenen Formen, die
nicht exakt sind. Das Poincaré Lemma zeigt nun, dass die Frage der
Exaktheit einer Form vom Definitionsgebiet abhängt.
Eine offene Menge U ⊂ Rn heißt sternförmig,wenn es einen Punkt p ∈ U
gibt, so dass für jeden Punkt q ∈ U die Verbindungslinie
{p + t(q − p) : 0 ≤ t ≤ 1}
ganz in U liegt.
Satz 7.6.1 (Poincaré Lemma). Sei U ⊂ Rn offen und sternförmig und ω
eine in U glatte geschlossene k-Form, k ≥ 1. Dann ist ω exakt.
Beweis. Der Beweis basiert auf folgendem Lemma.
Lemma 7.6.2. Seien U ⊂ Rn und V ⊂ R × Rn offen mit [0, 1] × U ⊂ V. Die
Abbildungen ψ0 , ψ1 : U → V seien definiert durch
ψν (x) = (ν, x),
ν = 0, 1.
Ist dann σ eine glatte geschlossene k-Form auf V, k ≥ 1, so gibt es eine glatte
(k − 1)-Form η auf U mit
ψ∗1 σ − ψ∗0 σ = dη.
Beweis. Seien t, x1 , . . . , xn die Koordinaten in R × Rn . Dann kann man σ
schreiben
σ=
X
|I|=k
fI dxI +
X
|J|=k−1
g J dt ∧ dx J .
Analysis 3
142
Es ist dann ψ∗ν σ =
dσ =
X ∂ fI
I
∂t
I fI (ν, x) dxI ,
P
dt ∧ dxI +
so dass für das Differential folgt
n
XX
∂ fI
I
i=1
∂xi
dxi ∧ dxI −
n
XX
∂g J
J
i=1
∂xi
dt ∧ dxi ∧ dx J .
Da dσ = 0 gilt, ist
X ∂ fI
∂t
I
dxI =
X X ∂g J
J
i
∂xi
dxi ∧ dx J .
Integriere beide Seiten über t = 0 bis t = 1. Da
1
Z
0
und
∂ fI
(t, x) dt = fI (1, x) − fI (0, x)
∂t
Z 1
∂g J
∂
g J (t, x) dt,
(t, x) dt =
∂xi 0
0 ∂xi
P R 1
∗
∗
erhält man ψ1 σ − ψ0 σ = dη mit η = J 0 g J (t, x)dt dx J .
Z
1
Nun zum Beweis des Satzes Es kann angenommen werden, dass die
offene Menge U sternförmig bezüglich des Nullpunktes ist. Sei
φ : R × Rn → Rn ;
φ(t, x) = tx,
und V = φ−1 (U). Dann gilt [0, 1] × U ⊂ V. Seien ψν wie im Lemma. Die
k-Form σ = φ∗ ω ist geschlossen, da ω geschlossen ist. Nach dem Lemma
gibt es eine (k − 1)-Form η auf U mit
ψ∗1 σ − ψ∗0 σ = dη.
Da φ ◦ ψ1 = IdU und φ ◦ ψ0 die konstante Abbildung 0 ist, folgt
ψ∗1 σ = ψ∗1 (φω ) = (φ ◦ ψ1 )∗ ω = ω,
ψ∗0 σ = 0.
Analysis 3
143
Also ist ω = dη.
Eine jede exakte Form ist stets geschlossen und daher kann man für eine
glatte Mannigfaltigkeit M für jedes p ≥ 0 die de Rham Kohomologie
Hp (M) = {geschlossene p − Formen}/{exakte p − Formen}
definieren. Diese Gruppen enthalten tiefliegende Informationen über
die Geometrie der Mannigfaltigkeit. Die de Rham Kohomologie ist
Untersuchungsgegenstand der sogenannten Differentialtopologie.
7.7
Die Stokes-Formel für Mannigfaltigkeiten
Sei M ⊂ Rk eine glatte orientierte n-dimensionale Mannigfaltigkeit und
sei N ⊂ M eine glatte Hyperfläche in M, d.h. N ist eine glatte
(n − 1)-dimensionale Untermannigfaltigkeit. Also ist N eine Teilmenge
von M, die ebenfalls eine glatte Mannigfaltigkeit ist. Ein Normalenfeld
S
auf N ist eine Abbildung ν : N → p∈N Tp M so dass für jedes p ∈ N der
Vektor ν(p) ∈ Tp M senkrecht (in Rk ) steht auf Tp N und die Länge 1 hat.
Ist N orientiert, so heißt ν positive orientiert, wenn für jedes p ∈ N und
jede positiv orientierte Basis v1 , . . . , vn−1 von Tp N die Basis
ν(p), v1 , . . . , vn−1 von Tp M positiv orientiert ist.
Satz 7.7.1 (Stokes). Sei ω eine glatte (n − 1)-Form auf M. Sei A eine
kompakte Teilmenge von M mit glattem Rand, so gilt
Z
Z
dω =
ω,
A
∂A
wobei der Rand ∂A die durch das äußere Normalenfeld gegebene
Orientierung trägt.
Analysis 3
144
Beweis. Man macht sich leicht klar, dass es einen Atlas (Ui , φi )i∈I auf M
gibt, dergestalt, dass φi eine Randkarte ist, sobald U j ∩ ∂A , ∅ gilt. Ist
dann (Ui )i∈I eine Teilung der Eins mit supp(ui ) ⊂ Ui für jedes i, dann
liefert der Satz von Stokes für den Rn , dass
Z X
Z
XZ
X Z
d
dω =
ui ω =
d(ui ω) =
d(ui ω)
A
A
A
A∩Ui
i∈I
i∈I
i∈I
XZ
XZ
=
φ∗ d(ui ω) =
dφ∗ (ui ω)
i∈I
=
i∈I
=
φ(A∩Ui )
XZ
∂φ(A∩Ui )
XZ
i∈I
∂A∩Ui
φ(A∩Ui )
i∈I
φ∗ (ui ω) =
XZ
i∈I
XZ
ui ω =
i∈I
∂A
φ(∂A∩Ui )
φ∗ (ui ω)
Z
ui ω =
∂A
ω.
Korollar 7.7.2. Sei M eine kompakte n-dimensionale orientierte
Mannigfaltigkeit. Dann gilt für jede glatte (n − 1)-Form ω auf M:
Z
dω = 0.
M
Beweis. Da M kompakt ist, kann man im Satz von Stokes A = M
wählen. Da dann ∂A = ∅ ist, folgt die Behauptung.
Das folgende Beispiel zeigt, dass die Sternförmigkeit der offenen
Menge im Poincaré-Lemma in der Tat erforderlich ist.
Beispiel 7.7.3. In Rn \ {0} betrachte die (n − 1)-Form
σ=
n
X
(−1)i−1 x
i
n
i=1
||x||
ci · · · ∧ dxn .
dx1 ∧ . . . dx
Analysis 3
145
Aus
!
∂
xi
∂
xi
=
n
∂xi ||x||n
∂xi (x21 + · · · + x2n ) 2
=
(x21
+ ··· +
n
x2n ) 2 − nx2i (x21 + · · ·
(x21 + · · · + x2n )n
+
n
x2n ) 2 −1
=
1−
nx2i
||x||2
n
||x||
folgt dσ = 0. Um zu zeigen, dass σ nicht exakt ist, integriert man σ über
die Sphäre Sn−1 , die durch das äußere Normalenfeld orientiert ist. Für
||x|| = 1 ist allerdings σ(x) = ω(x) mit
n
X
cj · · · ∧ dxn
(−1) j−1 x j dx1 ∧ . . . dx
ω=
j=1
auf Rn gilt dω = n dx1 ∧ · · · ∧ dxn . Sei B der offene Einheitsball in Rn . Es
folgt nach dem Satz von Stokes:
Z
Z
σ=
Sn−1
Z
ω=
Sn−1
dω = nτn ,
B
wobei τn das Volumen des Einheitsballs ist. Wäre σ exakt, so wäre nach
Korollar 7.7.2 das Integral Null. Also ist σ nicht exakt.
7.8
Der Brouwersche Fixpunktsatz
Als weitere Anwendung des Stokesschen Satzes wird hier der
Brouwersche Fixpunktsatz bewiesen, nach dem jede stetige Abbildung
des abgeschlossenen Einheitsballs in sich einen Fixpunkt haben muss.
In dem Beweis wird die in Beispiel 7.7.3 betrachtete Differentialform ein
Rolle spielen.
Analysis 3
146
Satz 7.8.1 (Brouwerscher Fixpunktsatz). Sei B̄ ⊂ Rn der abgeschlossene
Einheitsball. Dann hat jede stetige Abbildung f : B̄ → B̄ einen Fixpunkt,
d.h. es gibt ein p ∈ B̄ mit f (p) = p.
Beweis. Für n = 1 ist B̄ = [−1, 1] und die Aussage folgt aus dem
Zwischenwertsatz angewandt auf die Funktion x − f (x). Sei also n ≥ 2
angenommen.
Sei ferner f : B̄ → B̄ stetig. Annahme: f hat keinen Fixpunkt. Um einen
Widerspruch zu erreichen zeigt man zunächst, dass es unter der
gegebenen Annahme auch eine glatte Funktion F ohne Fixpunkt auf B̄
gibt. Genauer ist zu zeigen, dass es eine glatte Funktion F : Rn → Rn
gibt, die F(B̄) ⊂ B̄ erfüllt und keinen Fixpunkt auf B̄ hat. Dann führt
diese Aussage zu einem Widerspruch.
Zunächst setze f zu eine stetigen Funktion mit kompaktem Träger
f : Rn → Rn fort. Dies ist immer möglich. Zum Beispiel kann man für
1 < ||x|| < 2 setzen: f (x) = f (x/ ||x||)(2 − ||x||). Für ||x|| ≥ 2 setzt man dann
f (x) = 0.
Da f keinen Fixpunkt auf der kompakten Menge B̄ hat, gibt es ε > 0 mit
x − f (x) ≥ ε für jedes x ∈ B̄. Man konstruiert eine glatte Abbildung
F : Rn → Rn mit
F(x) − f (x) < ε/2
für jedes x ∈ Rn . Dann hat auch F keinen Fixpunkt in B̄. Hierzu wähle
ein δ > 0 so dass
x − y < δ
⇒
f (x) − f (y) < ε/4.
Ein solches δ existiert, das f gleichmäßig stetig ist. Wähle nun eine
Analysis 3
147
glatte Funktion χ : Rn → [0, 1] mit Träger im Ball um Null mit Radius δ
R
und Rn χ(x) dλ(x) = 1. Setze
Z
Z
F1 (x) = f ∗ χ(x) =
f (y)χ(x − y) dλ(y) =
Rn
f (x − y)χ(y) dλ(y).
Rn
Dann ist F1 glatt und es gilt für jedes x ∈ Rn
Z
Z
F1 (x) − f (x) = f (x − y)χ(y) dλ(y) −
f (x)χ(y) dλ(y)
Rn
Z Rn
≤
χ(y) f (x − y) − f (x) dλ(y) < ε/4.
Rn
n
o
Sei d = max ||F1 (x)|| : x ∈ B̄ . Ist d ≤ 1, so setze F = F1 , andernfalls setze
F(x) = d1 F1 (x). Dann ist in jedem Fall F(B̄) ⊂ B̄. Ferner gilt d < 1 + ε/4 und
also
1
||F1 (x) − F(x)|| = F1 (x) − F1 (x)
d
d−1
=
||F1 (x)|| < ε/4
d
so dass f (x) − F(x) < ε/2 für x ∈ B̄ gilt, woraus folgt, dass auch F
keinen Fixpunkt in B̄ hat.
Man ersetzt f durch F und nimmt also an, dass f auf Rn glatt ist. Wegen
der Stetigkeit von f kann man annehmen, dass f in einer (kleinen)
Umgebung U von B̄ fixpunktfrei ist. Sei φ : U → Rn \ 0 definiert durch
φ(x) = x − f (x). Da die in Beispiel 7.7.3 betrachtete Form σ geschlossen
ist, ist auch φ∗ σ geschlossen. Die Menge U kann als sternförmig
angenommen werden. Dann ist nach dem Poincaré Lemma die Form
φ∗ σ exakt. Also ist
Z
φ∗ σ = 0.
Sn−1
Analysis 3
148
Sei
φ̃ : R × U → Rn ;
φ̃(t, x) = x − t f (x).
Dann ist insbesondere φ̃(1, x) = φ(x) und φ̃(0, x) = x. Für ||x|| = 1 und
0 ≤ t ≤ 1 ist φ̃(t, x) , 0, also ist V = φ̃−1 (Rn \ 0) eine offenen Menge, die
[0, 1] × Sn−1 umfasst. Man verkleinert U nun zu einer offenen
Umgebung von Sn−1 , von der angenommen wird, dass [0, 1] × U ⊂ V. Es
seien ψν : U → V die Funktionen ψν (x) = (ν, x) für ν = 0, 1 wie in
Lemma 7.6.2. Nach diesem Lemma gibt es eine differenzierbare
(n − 2)-Form η auf U, so dass
ψ∗1 φ̃∗ σ − ψ∗0 φ̃∗ σ = dη.
Für x ∈ U gilt aber
(φ̃ ◦ ψ1 )(x) = φ̃(x, 1) = x − f (x) = φ(x),
(φ̃ ◦ ψ0 )(x) = φ̃(0, x) = x.
Daraus folgt ψ∗i φ̃∗ σ = φ∗ σ und ψ∗0 φ̃∗ σ = σ auf U, also φ∗ σ − σ = dη auf U.
R
Nach Korollar 7.7.2 ist Sn−1 dη = 0, so dass
Z
Z
σ=
Sn−1
φ∗ σ = 0.
Sn−1
Dies ist ein Widerspruch zu den Bemerkungen in Beispiel 7.7.3. Also
muss f doch einen Fixpunkt haben.
7.9
De Rham Kohomologie
Sei M eine Mannigfaltigkeit und sei dk : Ωk (M) → Ωk+1 (M) das aeussere
Differential. Dann gilt dk dk−1 = 0 wie in Satz 6.3.9 gezeigt wurde. Dies
bedeutet Bild(dk−1 ) ⊂ ker(dk ).
Definition 7.9.1. Die k-te de Rham Kohomologie der Mannigfaltigkeit
Analysis 3
149
M ist definiert als
Hk (M) ker(dk )/ Bild(dk−1 ).
Hierbei wird fuer k = 0, das Bild von d−1 kuenstlich als Null definiert.
Beispiele 7.9.2.
• Es gilt
R
k
n
H (R ) =
0
k = 0,
k , 0.
Fuer k ≥ 0 ist dies genau der Inhalt des Poincaré Lemmas, Satz
7.6.1. Fuer k = 0 ist es das folgende Lemma.
• Ist M = M1 ∪ M2 die disjunkte Vereinigung zweiter
Untermannigfaltigkeiten, dann gilt
Hk (M) = Hk (M1 ) ⊕ Hk (M2 ).
Lemma 7.9.3. Fuer jede zusammenhaengende Mannigfaltigkeit M gilt
H0 (M) R.
Beweis. Fuer k = 0 ist das Bild von dk−1 gleich Null, also H0 (M) = ker(d0 ).
Ist nun f ∈ ker(d0 ), so gilt in lokalen Koordinaten x1 , . . . , xn , dass
n
X
∂f
dx j .
0 = df =
∂x j
j=1
Daher sind saemtliche Richtungsableitungen
∂f
∂x j
gleich Null, da M
zusammenhaengend ist, ist f konstant. Andererseits liefert jede
konstante Funktion eine Kohomologieklasse, also ist
n
o
H0 (M) = ker(d0 ) = konstante Funktionen R.
Analysis 3
150
Proposition 7.9.4. Ist F : M → N eine glatte Abbildung zwischen
Mannigfaltigkeiten, so folgt aus F∗ d = dF∗ , dass F eine lineare Abbildung
F∗ : Hk (N) → Hk (M) induziert. Ist G : L → M eine zweite glatte Abbildung,
so gilt (F ◦ G)∗ = G∗ ◦ F∗.
Insbesondere folgt: Ist F ein Diffeomorphismus, so ist F∗ eine Isomorphie auf
den Kohomologiegruppen.
Beweis. Aus F∗ d = dF∗ folgt, dass F den kern von dN auf den Kern von
dM abbildet und dasselbe fuer die Bilder, also induziert F∗ eine
Abbildung F∗ : ker / Bild → ker / Bild. Die Ausage ueber die zweite
Abbildung G ist klar. Ist insbesondere F ein Diffeomnorphismus. kann
man L = N und G = F−1 waehlen und erhaelt
IdH(M) = Id∗M = (G ◦ F)∗ = F∗ ◦ G∗
und ebenso IdH(N) = G∗ ◦ F∗ , so dass F∗ ein Isomorphismus ist.
Satz 7.9.5 (Mayer-Vietoris Sequenz). Sei M eine Mannigfaltigkeit und
sei M = U ∪ V, wobei U und V offene Mengen sind, so dass der Schnitt
U ∩ V nichtleer ist. Dann gibt es eine exakte Sequenz
ρ
∆
∂
· · · → Hk (M) −→ Hk (U) ⊕ Hk (V) −→ Hk (U ∩ V) −→ Hk+1 (M) → . . .
Beweisidee. Sei ρ : Ωk (M) → Ωk (U) ⊕ Ωk (V) gegeben duch
ρ(ω) = ω|U ⊕ ω|V .
Sei dann ∆ : Ωk (U) ⊕ Ωk (V) → Ωk (U ∩ V) gegeben duch
Analysis 3
151
∆(α, β) = (α − β)|U∩V . Dann ist die Sequenz
ρ
∆
0 → Ωk (M) −→ Ωk (U) ⊕ Ωk (V) −→ Ωk (U ∩ V) → 0
exakt denn
1. ρ ist injektiv: Ist ρ(ω) = 0, dann ist ω sowohl auf U als auch auf V
gleich Null, da M = U ∪ V, ist ω = 0.
2. Bild(ρ) = ker(∆): Sei (α, β) ∈ ker(∆), dann folgt α|U∩V = β|U∩V . Sei
nun 1 = u + v eine Teilung der Eins, die der Ueberdeckung
M = U ∪ V unterliegt, also supp(U) ⊂ U und supp(v) ⊂ V. Setze
dann uα durch Null nach M fort und vβ ebenso. Sei dann
ω = uα + vβ ∈ Ωk (M). so folgt ρ(ω) = (ω|U , ω|V ). Es ist nun
ω|U = uα|U + vβ|U = uα|U + vα|U = (u + v)α = α
und ebenso ω|V = β, insgesamt also ρ(ω) = (α, β).
3. ∆ ist surjektiv: Sei η ∈ Ωk (U ∩ V), dann laesst sich −uη durch Null
nach V fortsetzen und vη durch Null nach U. Man hat dann
∆(vη, −uη) = (v + u)η = η.
Man stellt nun fest, dass die Abbildungen ρ und ∆ mit den jeweiligen
aeusseren Differentiualen vertauschen, dass also das Diagramm
/
0
0
/
Ωk (M)
k+1
Ω
ρ
d
/
(M)
ρ
/
Ωk (U) ⊕ Ωk (V)
∆
d
Ωk+1 (U) ⊕ Ωk (V)
∆ /
/
Ωk (U ∩ V)
/
0
/
0
d
Ωk+1 (U ∩ V)
kommutiert. In einer solchen Situation gibt es einen allgemeinen
Apparat, der einem einen Verbindunghomomorphismus ∂ liefert, der
die Sequenz des Satzes exakt macht.
Analysis 3
152
Satz 7.9.6 (Kuenneth-Formel). Ist M = M1 × M2 dasdirekte Prodzkt
zweier Untermannigfaltigkeiten, dann ist
k
H (M) k
M
Hi (M1 ) ⊗ H j (M2 ).
i+j=k
Beweisidee. Die Abbildung Ωi (M1 ) ⊗ Ω j (M2 ) → Ωi+j (M),
α ⊗ β 7→ α ∧ β
induziert einen Isomorphismus auf den Kohomologiegruppen.
Satz 7.9.7. Sei n ≥ 1. Fuer die n-Dimensionale Sphaere Sn gilt
R
Hk (Sn )
R
0
k = 0,
k = n,
sonst.
Fuer den n=diemnsionalen Torus Tn = S1 × S1 × · · · × S1 (n-mal) gilt
!
n
k
n
dim H (T ) =
.
k
Beweis. Sei zunaechst n = 1. Der Kreis S1 kann durch zwei offene
Mengen U, V ueberdeckt werden, so dass jede diffeomorph zu einem
offenen Intervall und damit diffeomorph zu R ist. Nach dem
Analysis 3
153
Poincaré-Lemma folgt dann
1 k = 0,
k
dim H (U) =
0 sonst.
Die Sequenz
0 → H0 (S1 ) → H0 (U) ⊕ H0 (V) → H0 (U ∩ V) →
→ H1 (S1 ) → H1 (U) ⊕ H1 (V) → H1 (U ∩ V) → 0
ist exakt. Wir kennen die Dimensionen der oberen Zeile: 1, 2, 2 Daraus
folgt, dass der Verbindungshomomorphismus ∂ : H0 (U ∩ V) → H1 (S1 )
in diesem Falle ein Bild der Dimension 1 hat. Also erhalten wir eine
exakte Sequenz
0 → R → H1 (S1 ) → H1 (U) ⊕ H1 (V) → H1 (U ∩ V) → 0
| {z }
|
{z
}
=0
=0
exakt. Nach dem Poincaré Lemma sind die beiden letzten Terme Null,
also ist R → H1 (S1 ) ein Isomorphismus und der Satz ist fuer n = 1
gezeigt. Weiter geht’s mit Induktion. Sei die Behauptung fuer n gezeigt.
Die Spaehre Sn+1 laesst sich ueberdecken durch U und V so dass
U Rn+1 V und so dass
U ∩ V Sn × R.
Mit der Kuenneth-Formel folgt Hk (U ∩ V) Hk (Sn ), so dass die
Mayer-Vietoris-Sequenz wie folgt aussieht:
. . . Hk−1 (Sn ) → Hk (Sn+1 ) → Hk (Rn+1 ) ⊕ Hk (Rn+1 ) →
→ Hk (Sn ) → Hk+1 (Sn+1 ) → . . .
Analysis 3
154
Ist 2 ≤ k ≤ n so ist das
· · · → 0 → Hk (Sn+1 ) → 0 ⊕ 0 → Hk (Sn ) → Hk+1 (Sn+1 ) → . . .
Ist k = n + 1, so ist es
· · · → 0 → Hn (Sn ) → Hn+1 (Sn+1 ) → 0 ⊕ 0,
so dass die Behauptung fuer k ≥ 2 folgt. Fuer k = 1 muss man die
vorherliegenden Terme beruecksichtigen:
0 → H0 (Sn+1 ) → H0 (Rn+1 ) ⊕ H0 (Rn+1 ) → H0 (Sn ) → H1 (Sn+1 ) → 0.
Die Dimensionen der ersten Terme sind 1, 2, 1, so dass der letzte Pfeil
die Null sein muss, also ist H1 (Sn+1 ) = 0.
Schliesslich zum Torus. Mit wiederholter Anwendung der
Kuenneth-Formel ist
H (T ) =
k
n
M
Hi1 (S1 ) ⊗ · · · ⊗ Hin (S1 ).
i1 +···+in =k
0≤iν ≤1
Jeder Summand, der nicht Null ist, ist eindimensional. Damit ist die
Gesamtdimension gleich der Anzahl der Summanden, also gleich der
Anzahl der Teilmenge von (i1 , . . . , in ) der Maechtigkeit k also gleich dem
Binomialkoeffizienten.
Index
η-messbar, 16
de Rham Kohomologie, 143, 148
µ-Nullmenge, 25
Diffeomorphismus, 102
µ-fast überall, 25
diskrete Topologie, 81
µ-singulärer Teil, 66
dominierte Konvergenz, 39
σ-Algebra, 2
Dynkin-System, 70
σ-additiv, 12
σ-endlich, 66
τ-positive Menge, 47
n-Sphäre, 99
äußeres Maß, 15
einfache Funktion, 10
endliche Schnitteigenschaft, 87
endliches Maß, 12
ersten Abzählbarkeitsaxiom, 93
erzeugte σ-Algebra, 3
abgeschlossene Abbildung, 85
erzeugte Dynkin-System, 71
Abschluss, 84
erzeugte Topologie, 91
absolut stetig, 65
abzählbar subadditiv, 15
abzählbar-coabzählbar, 3
Banach-Raum, 53, 56
Basis der Topologie, 93
fast überall, 25
Final-Topologie, 96
glatte Abbildung, 102
glatte Karte, 101
beschränkte lineare Abbildung, 57
Hölder-Ungleichung, 49
Borel-σ-Algebra, 3
Hausdorff-Raum, 82
Borel-Maß, 12
Hilbert-Raum, 59
Borel-messbar, 5
holomorphe Funktion, 136
Borel-messbare Mengen, 3
homöomorph, 85
Cantor-Diskontinuum, 25
Homöomorphismus, 85
Cauchy-Schwarz-Ungleichung, 59
Initialtopologie, 94
charakteristische Funktion, 7
Integral, 31, 32
Co-endlich-Topologie, 81
integrierbar, 37
155
Analysis 3
156
kompakt, 87
offene Abbildung, 85
komplexwertiges Maß, 45
offene Umgebung, 81
Koordinatenableitungen, 104
offenen Mengen, 81
Lebesgue, Satz von, 39
Lebesgue-σ-Algebra, 20
Lebesgue-integrierbar, 37
Lebesgue-Maß, 13
Lebesgue-messbar, 20
Lebesgue-Nullmenge, 25
Lebesgue-Zerlegung, 67
Lebesguesche äußere Maß, 19
offenen Rechtecke, 96
offenen Umgebungsbasis, 92
ONB, 61
ONS, 61
Operatornorm, 57
Orthogonalraum, 64
Orthonormalbasis, 61
Orthonormalsystem, 61
Limes inferior, 8
positiv orientiert, 122
Limes superior, 8
positive Maße, 46
linearen Funktional, 57
Prä-Hilbert-Raum, 59
linearen Operator, 57
Prinzip der guten Mengen, 78
lokale Koordinaten, 105
Produktmaß, 73
lokalkompakt, 88
Produkttopologie, 94
Maßraum, 13
messbare Abbildung, 5
messbare Funktion, 6
messbare Mengen, 2
Messraum, 2
Minkowski-Ungleichung, 50
monoton, 13
Norm, 59
normierter Vektorraum, 55
Nullfunktion, 25
Nullmenge, 25, 46
Punktderivationen, 104
Punktmaß, 12
punktweise Limes, 9
Quotiententopologie, 96
Radon-Nikodym-Dichte, 67
regulär von außen, 23
regulär von innen, 23
relativ kompakt, 90
Satz von Lebesgue, 39
schnittstabil, 70
Skalarprodukt, 58
Analysis 3
stetig, 84
stetig im Punkt x, 86
stetig von oben, 13
stetig von unten, 13
Tangentialraum, 102
Teilraumtopologie, 83
Topologie, 81
Topologie-Basis, 93
topologischer Raum, 81
Torus, 100
Totalvariation, 47
triviale Topologie, 81
Umgebung, 82
Umgebungsbasis, 92
Urysohn’s Lemma, 90
Vektorfeld, 107
Verbindunghomomorphismus, 151
Verklebung, 97
Vertretersystem, 21
Vervollständigung, 29
vollständiges ONS, 61
wesentliche Schranke, 51
Zählmaß, 12
zentriert, 107
Zurückziehung, 117
zweiten Abzählbarkeitsaxiom, 93
157