2 Grundlagen
Werbung

2 Grundlagen
2.1 Notation
2.1.2 Harmonische Zeitabhängigkeit
2.1.1 Strom, Spannung, Impedanz
In vielen Fällen sind Strom und Spannung zeitabhängige Größen. Im einfachsten Fall ist die Zeitabhängigkeit harmonisch, d.h. z.B.
Die wichtigsten Grundgrößen für die Elektronik sind
der Strom I und die Spannung U. Beide besitzen eine Richtung und sind meist zeitabhängig. Die Beziehung zwischen Strom und Spannung wird definiert
über die verwendeten Bauelemente. Dabei unterscheidet man zwischen aktiven und passiven Bauelementen: bei aktiven Bauelementen, wie z.B. Quellen, Transistoren, Verstärkern wird Energie ins System eingeführt.
U(t) = A cos(ωt + ϕ).
Für diese Fälle verwendet man die gleiche vereinfachte Schreibweise wie bei anderen physikalischen
Schwingungen: Strom und Spannung werden als
komplexe Größen I = I0 eiϕ und U = U0 eiϕ geschrieben. Die realen zeitabhängigen Größen ergeben sich
daraus als
Die wichtigsten passiven Bauelemente sind der
Ohm’sche Widerstand R, der Kondensator C und die
Induktivität L.
U(t) = ℜ U0 eiϕ eiωt = ℜ Ueiωt
und analog für den Strom. Dies verkürzt nicht nur
die Schreibarbeit, es vereinfacht auch die Rechnung.
So können Schaltungen mit reaktiven Bauelementen
(Kondensatoren und Induktivitäten) algebraisch beschrieben werden, ohne die Verwendung von Differentialgleichungen.
Hier haben wir nur harmonische Zeitabhängigkeit
diskutiert. Man kann jedoch eine beliebige zeitabhängige Funktion in harmonische Komponenten zerlegen: diese bilden ein vollständiges (und orthogonales) Funktionensystem.
Abbildung 2.1: Die wichtigsten passiven Bauelemente: Widerstand, Kondensator,
Spule
Bei diesen Elementen gelten die folgenden Beziehungen zwischen Strom und Spannung:
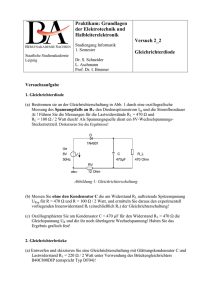
Abb. 2.2 zeigt als Beispiel die Fourier-Zerlegung
einer rechteckförmigen Wechselspannung: Sie besteht aus den ungeraden Harmonischen der Grundfrequenz mit abnehmender Amplitude:
• Ohm’scher Widerstand R:
U(t) = R I(t).
• Kapazität C:
1
U(t) =
C
1
1
y(t) = sin(ωt) + sin(3ωt) + sin(5ωt) + ...
3
5
Z
I(t)dt.
• Induktivität L:
Mathematisch wird diese Zerlegung durch die Fouriertransformation erreicht. Wir diskutieren hier zunächst eine etwas allgemeinere Transformation:
dI(t)
U(t) = L
.
dt
9
t/2 gilt nach dem Spanlexen Widerstande Z^
C^) und Z2 (aus Paraleingesetzt werden:
1
Zi/Z2)
L/i/(l + Z^ 72)-
-46
Haufig werden die Amplituden der Schwingungsbeitrage, d.h. die Fourier-Koeffizienten,
im Frequenzbereich dargestellt, so daB sich das
Amplitudenspektrum ergibt. Bild 1-51 zeigt die
Fourier-Zerlegung einer Rechteckschwingung
in die Schwingungsanteile und in das Amplitu-2 Grundlagen
denspektrum.
12,0 • 10^ Q-J^^^^^Cl
L
→
−
L
→
−
L
→
−
L
→
−
L
→
−
d 1-47
10-^n-i
ultipliziert, so ergibt sich
t
e>»
7 0,098
spannung betragt 5,32 V,
xm(p= 2,5° vor.
L
→
−
L
→
−
e WechselgroBen
groBe y{t) kann nach
<2<x
Amplitudenperiodische
WechselgroBe
<c^
Spel<trum
1768 bis 1830) in eine
Cosinus- und Sinusden. Die auftretenden Bild 1-51. Fourier-Analyse einer RechteckschwinAbbildung 2.2: Fourier-Zerlegung
einer
ei ganzzahlige Viel- gung.
Rechteckfunktion.
enz, welche die periWerden die Symmetrieeigenschaften bestimmchreibt. Somit gilt
ter Funktionen beriicksichtigt, dann entfallen
entsprechende
Fourier-Koeffizienten, wie Bild
2.1.3 1-52
Laplace
Transformation
zeigt.
s(/cco0) +
Bild 1-53 zeigt den Kurvenverlauf y (t) und die
Für dieImpulsfolge
Analyse fiir
vonRechteck,
allgemeinen
ZeitabhängigkeiDreieck
und Sagen (i^ CO 0).
(1-120)
zahn
sowie
das
Amplitudenspektrum
mit denKomten ist es häufig nützlich, diese in harmonische
dazugehorigen
Fourier-Reihen.
ponente zu zerlegen. Mathematisch wird dies mit
L
→
−
L
→
−
L{ f (t)} =
und für das Integral
Z t
L{
0
f (t 0 )dt 0 } =
1
L { f (t)}.
s
Dies ist z.B. nützlich für Einschaltprobleme.
2.1.4 Komplexe Impedanzen
f (t)e−st dt = F(s).
0
Enthalten die Schaltungen nicht nur Widerstände,
sondern auch ‘reaktive’ Elemente wie Kondensatoren und Spulen, so sind Strom und Spannung nicht
mehr in Phase. Damit kann die Beziehung zwischen
Strom und Phase nicht mehr auf das Ohm’sche Gesetzt U = RI reduziert werden. Hat die Spannung
jedoch eine harmonische Zeitabhängigkeit, so kann
das Ohm’sche Gesetz auch auf diese Fälle erweitert
werden, indem man den Widerstand komplex macht
und ihn als Impedanz bezeichnet.
Als einfaches Beispiel betrachten wir die Sprungfunktion θ (t), welche auch als Heaviside-Funktion
bezeichnet wird. Ihre Laplace-Transformierte ist
∞
Z ∞
Z ∞
e−st 1
Θ(s) =
θ (t)e−st dt =
e−st dt = −
= .
s
s
0
0
0
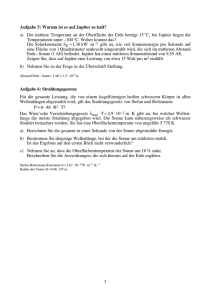
Abbildung 2.3 zeigt weitere Funktionen mit ihren
Laplace-Transformierten.
Zu den nützlichen Beziehungen zwischen LaplaceTransformierten gehört diejenige für die LaplaceTransformierte einer Ableitung
Die wichtigsten komplexen Impedanzen Z = U/I
sind diejenigen für
• Ohmscher Widerstand R:
d f (t)
} = s L { f (t)} − f (0).
L{
dt
ZR = R.
• Kapazität C:
Entsprechend gilt für die zweite Ableitung
L{
3
Abbildung 2.3: Paare von Laplace-transformierten.
Hilfe von Fourier- oder Laplace Transformation erreicht. Die Laplace-Transformierte einer Funktion
f (t) ist definiert als
Z ∞
s
d 2 f (t)
} = s2 L { f (t)} − s f (0) − f 0 (0)
dt 2
ZC =
10
1
.
iωC
u
(D
G
B
t»
T3
'^
fl
pq
^^
^
"1^
O
II
I
II
3
3
bl
bl
S<S ^1
::>!
t^
^
:::>!
t-.i
A15
00
^
<D
^
VH
G
OH
00
G
a
0
^
C/5
0
0
3
•'-^
^1
Ml
3
bll
<1
Nl
II
O
1 0
0
II
\
1^
'-I3
t/3 :cd
O C
^00
X3
X)
•5b
G
N
d)
=J
O^
fc
3 "55
s;
^
?
s
Q
oq
>-H
«o
0:5
>
:^
R Re(Z)
(U < !
Abbildung 2.5: Phasenverschiebung
zwischen
Strom und Spannung für Widerstand (links), Spule (mitte) und
Kondensator (rechts).
<
Z
^1h
L
also die Verzögerung zwischen Strom und Spannung
in Einheiten der Periode.
Abbildung 2.4: Graphische Darstellung der komplexen Impedanz.
Beim Kondensator ist der Imaginärteil der Impedanz
negativ, d.h. der Strom eilt der Spannung voraus. Bei
der Spule ist der Imaginärteil positiv, d.h. die Spannung eilt dem Strom voraus.
• Induktivität L:
ZL = iωL.
Wie Ohm’sche Widerständen können Impedanzen
bei Reihenschaltungen addiert werden, Zr = ∑i Zi ,
während bei Parallelschaltungen die Kehrwerte (d.h.
die Admittanzen) addiert werden:
Diese ergeben sich u.A. aus der LaplaceTransformation: Für einen Widerstand gilt
U(t) = R I(t) −
L
→ u(s) = Ri(s),
−1
Z −1
p = ∑ Zi .
i
d.h. die Impedanz im s-Raum ist ebenfalls R. Für eine Spule gilt
U(t) = L
c^ II
N
induktiv
kapazitiv
7^
00
1^-
^
i-t 0
(U N (U
43 (U 4:3
0 W) 0
=3
Im(Z)
Diesen Kehrwert (analog zum Leitwert als Kehrwert
des Widerstandes) bezeichnet man als ‘Admittanz’.
dI(t)
L u(s) = L[si(s) − I(0)].
dt −→
2.1.5 Frequenzabhängigkeit
Für I(0) = 0 folgt, dass hier die Impedanz im sRaum
ZL (s) =
u(s)
= sL
i(s)
ist. Analog finden wir für eine Kapazität C
ZC (s) =
1
.
sC
Die obigen Ausdrücke für die komplexe Impedanz
ergeben sich durch die Substitution s → iω, d.h. wir
betrachten nur Werte auf der imaginären Achse, also
Funktionen mit harmonischer Zeitabhängigkeit.
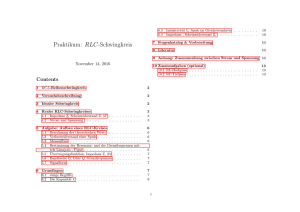
Abbildung 2.6: Ortskurve und Frequenzgang für
Widerstand und Kondensator in
Reihe.
Der Realteil R der Impedanz Z = R + iX wird als
Wirkwiderstand bezeichnet, der Imaginärteil X als
Blind- oder Scheinwiderstand. Das Verhältnis X/R
von Blind- und Wirkwiderstand bestimmt den Phasenwinkel
Als einfaches Beispiel betrachten wir die Reihenschaltung aus einem Widerstand und einem Kondensator. Die Impedanz beträgt
ϕ = ϕU − ϕI = tan−1 (X/R),
ZRC = R +
11
1
iωC
Grundlagen der Elektrotechnik
O
&
>
c«
M
^3
S
en
T3
^
O
o
2 Grundlagen
2 Grundlagen
und der Phasenwinkel
tan ϕ =
X
1
=−
.
R
ωRC
+1
Als Verlustwinkel bezeichnet man δ = π/2 − ϕ. Bei
der Ortskurvendarstellung wird die Impedanz in der
komplexen Ebene dargestellt, wobei die Frequenz
als Parameter erscheint. Da der Realteil konstant ist,
erhält man eine Gerade parallel zur imaginären Achse. Schaltet man zusätzlich eine Spule in Reihe, so
wird die Impedanz
ZRCL = R +
0
1
2
−1
Abbildung 2.8: Smith Chart als konforme Abbildung der komplexen Ebene.
1
+ iωL
iωC
und die Ortskurve geht im 1. Quadranten weiter.
In der rechten Hälfte der Abbildung ist der Frequenzgang der Schaltung dargestellt. Hier werden
Absolutbetrag und Phase separat als Funktion der
Frequenz dargestellt.
Eine weitere Darstellungsmöglichkeit ist die Smith
Chart, bei der die komplexe Ebene verzerrt dargestellt wird. Dabei werden beide Achsen so skaliert,
dass ∞ an den Rand der Figur fällt. Gleichzeitig wird
die imaginäre Achse aufgerollt, so dass sie sich zu
einem Kreis schließt. Dabei handelt es sich um eine
winkelgetreue, d.h. konforme Abbildung.
hier:
R = Re(Z)
X = Im(Z)
|Γ| = konst.
Abbildung 2.7: Frequenzgang eines Tiefpass Filters
in Bode-Darstellung.
Abbildung 2.9: Die wichtigsten Orte im SmithDiagramm.
Alternativ zu Ortskurve und Frequenzgang verwendet man andere Darstellungen. Um den Frequenzverlauf darzustellen, ist z.B. das Bode-Diagramm gut
geeignet: Die horizontale Achse ist eine logarithmische Frequenzachse. Für die vertikale Achse verwendet man eine logarithmische Achse für die Amplitude und eine lineare Achse für die Phase.
Abbildung 2.9 zeigt die wichtigsten Orte im SmithDiagramm. Kreise mit |Γ| = konst. werden als konzentrische Kreise dargestellt.
12
2 Grundlagen
2.1.6 Logarithmische
Spannungsverhältnisse
Für den Vergleich von Spannungen oder Leistungen
verwendet man häufig eine logarithmische Skala, die
“Dezibel-Skala”. Sie ist definiert über
2 Pa
Ua /R
A[dB] = 10 log
= 10 log
Pe
Ue2 /R
Ua
= 20 log
.
Ue
Abbildung 2.11: Zeitinvariantes System mit Einund Ausgangssignal.
dass die Übertragungsfunktion H(ω) von der Frequenz abjängt. Deshalb muss in diesen Fällen für
die Berechnung des Ausgangssignals das Eingangssignal zunächst in seine Frequenzkomponenten aufgeteilt werden. Dies geschieht über die Fouriertransformation,
u(ω) = F {U(t)}.
Im Frequenzbereich kann das Signal dann mit
der (i.A. frequenzabhängigen) Übertragungsfunktion H(ω) multipliziert werden;
u2 (ω) = H(ω)u1 (ω).
Das Ausgangssignal erhält man anschließend über
die inverse Fouriertransformation:
Abbildung 2.10: Beispiele für die dB Skala.
U2 (t) = F −1 {u2 (ω)}.
Ein Spannungsverhältnis von Ua /Ue = 100, z.B.,
entspricht somit einer Verstärkung von 40 dB, ein
Verhältnis von 2 entspricht 6 dB, 1/2 entspricht -6
dB etc.
Die Übertragungsfunktion H(ω) ist deshalb eine der
wichtigsten Größen für die Charakterisierung eines
Systems.
2.2.2 Tiefpass
2.2 Lineare, Zeit-invariante Systeme
Als Beispiel betrachten wir die Übertragungsfunktion eines Tiefpasses. Im einfachsten Fall besteht dieser aus einem Widerstand und einem Kondensator;
er wird deshalb als RC-Tiefpass bezeichnet.
2.2.1 Grundlagen
Die meisten elektronischen Schaltungen, die wir hier
diskutieren werden, verhalten sich linear, d.h. zwischen Strom und Spannung besteht eine lineare Beziehung, U = ZI, und / oder zwischen dem Eingangssignal U1 (t) und dem Ausgangssignal U2 (t)
besteht eine lineare Beziehung, U2 = HU1 . Hier bezeichnet H die Übertragungsfunktion.
Abbildung 2.12: RC-Tiefpass.
Die obige Beziehung gilt direkt, falls U1 (t) (und damit U2 (t)) eine harmonische Zeitabhängigkeit hat,
also nur eine Frequenzkomponente enthält. Bei allgemeinen Signalen, welche mehrere Frequenzkomponenten enthalten, muss berücksichtigt werden,
Die Schaltung kann als Spannungsteiler verstanden
werden. Bei hohen Frequenzen wirkt der Kondensator als Kurzschluss, so dass die Ausgangsspannung
verschwindet.
13
2 Grundlagen
Für eine quantitative Betrachtung schreiben wir die
Übertragungsfunktion als
H(ω) =
U2 (ω)
1/(iωC)
=
U1 (ω) R + 1/(iωC)
1 − iωRC
1
=
.
1 + iωRC 1 + ω 2 R2C2
Absolutbetrag und Phase werden somit
Abbildung 2.14: LR-Tiefpass.
=
Anstelle eines RC-Tiefpasses kann man auch mit einer Induktivität und einem Widerstand einen Tiefpass aufbauen. Auch diese Schaltung kann man als
Spannungsteiler interpretieren: bei hohen Frequenzen geht die Impedanz der Spule gegen Unendlich.
1
|H(ω)| = √
1 + ω 2 R2C2
tan ϕ = −ωRC.
Die relevante Größe für die Leistungsübertragung ist
das Quadrat des Absolutbetrags,
|H(ω)|2 =
2.2.3 Zeitliches Verhalten eines Tiefpasses
1
1
=
.
2
2
2
2
1+ω R C
1 + ω 2 ωGr
Bisher haben wir das Verhalten des Tiefpasses im
Frequenzraum diskutiert. Jetzt betrachten wir das
Verhalten im Zeitraum, z.B. die Antwort auf eine Sprungfunktion θ (t). Da grundsätzlich jedes System einen Tiefpass darstellt (mit unterschiedlichen
Grenzfrequenzen) ist dies ein sehr universelles Verhalten. Im Frequenzraum besteht die Sprungfunktion
aus einer breiten Verteilung von Frequenzen, welche
vom Tiefpass sehr unterschiedlich beeinflusst werden.
Hier steht ωGr = 1/RC für die Grenzfrequenz.
Abbildung 2.13: Übertragungsfunktion eines Tiefpasses.
Ein idealer Tiefpass würde alle Frequenzen unterhalb der Grenzfrequenz durchlassen und alle oberhalb vollständig unterdrücken. Dies ist z.B. nützlich,
wenn man weiss, das das gesuchte Signal sich im
Frequenzbereich unterhalb der Grenzfrequenz befindet: man kann damit Störsignale mit höherer Frequenz (wie z.B. Rauschen) unterdrücken.
Abbildung 2.15: Sprungantwort eines Tiefpasses.
Wie in der Abbildung gezeigt ist das wirkliche Verhalten weniger scharf: Die Leistung fällt ∝ ω −2 ab
Eine bessere Annäherung an das ideale Verhalten erreicht man, indem man mehrere Tiefpässe hintereinander schaltet. Damit erhält wird die Übertragungsfunktion potenziert, d.h. sie wird zu |H(ω)|2n und
die Dämpfung der durchgelassenen Leistung wird
∝ ω −2n .
Die angelegte Spannung ist in diesem Fall
U1 (t) = U0 θ (t).
Die Ausgangsspannung kann man aus der Lösung
der Differentialgleichung bestimmen, oder indem
man die Fourier-transformierte Funktion mit der
14
2 Grundlagen
Übertragungsfunktion multipliziert und diese wieder in den Zeitbereich transformiert. Im vorliegenden Fall erhält man für die Stufenantwortfunktion
g(t) =
U2 (t)
= 1 − e−t/τ .
U1 (t)
Abbildung 2.16: Pulse vor und
Hochpassfilter.
Dazu berechnen wir z.B. aus der Differentialgleichung
U2 (t) =
Q
1
=
C C
Z t
I(t 0 ) dt 0 .
nach
einem
Zeit an. Für eine beliebige Eingangsfunktion U1 (t)
wirkt das System somit als Integrator,
0
Den Strom I(t) als Funktion der Zeit wiederum erhält man aus
U2 (t) ≈
1
τ
Z t
0
U1 (t 0 )dt 0 .
U0 = RI(t) +U2 (t)
Betrachten wir anstelle eines Tiefpassfilters ein
Hochpassfilter, so werden die hohen Frequenzen
durchgelassen, aber die tiefen gedämpft. Als Antwort auf eine Stufenfunktion finden wir somit einen
schnellen Anstieg, gefolgt von einem exponentiellen
Abfall. Die Zeitkonstante dieses Abfalls ist das Inverse der Grenzfrequenz. Im Bereich kurzer Zeiten,
t τ kann ein Hochpassfilter als Differenzierer verwendet werden.
für t > 0:
I(t) =
1
[U0 −U2 (t)].
R
Somit ist
U2 (t) =
1
[U0
RC
Z t
0
dt 0 −
Z t
0
U2 (t 0 )dt 0 ].
Die Lösung kann geschrieben werden als
U2 (t) = U0 (1 − e−t/τ ),
2.2.5 Zerlegung in Spanungsstöße
mit der Zeitkonstanten τ = RC. Dies bedeutet, dass
der Anstieg von 0 auf 90% der vollen Spannung eine
Zeit von ca.
ta = −τ ln0, 1 ≈ 2, 3 τ ≈
1
3 νGr
benötigt. Hier ist νGr = ωGr /2π die Grenzfrequenz
in Hertz. Dies bedeutet z.B., dass für die Messung
einer Anstiegszeit von ta ≈ 3 ns ein Messgerät (z.B.
Oszilloskop) mit einer Grenzfrequenz von 100 MHz
benötigt wird.
Abbildung 2.17: Zerlegung einer beliebigen Anregungsfunktion U1 (t) in eine Folge
von Stufenfunktionen.
2.2.4 Integrator und Differenziator
Bisher haben wir die Antwort einer Schaltung auf eine Stufenfunktion betrachtet. Im Folgenden untersuchen wir beliebige Eingangsfunktionen. Ist das System linear (davon gehen wir meistens aus), so ist es
Für kurze Zeiten t τ kann der exponentielle Term
in der Übertragungsfunktion vernachlässigt werden.
In diesem Bereich steigt die Spannung linear mit der
15
2 Grundlagen
möglich, das allgemeine Signal U1 (t) als Überlagerung einer Sequenz von Stufenfunktionen zu schreiben. Damit wird es möglich, das Ausgangssignal zu
schreiben als
Im Grenzfall kurzer Pulse können wir den Differenzenquotienten als Ableitung schreiben. Damit wird
das Ausgangssignal zu
U2 (t) → U0 ∆t ġ(t).
U2 (t) = U1 (t) ∗ ġ(t),
Das Produkt U0 ∆t, d.h. die Fläche des Pulses, wird
als Spannungsstoß bezeichnet. Die Funktion h(t) ist
die Impuls-Antwort-Funktion. Aus der Herleitung
geht hervor, dass sie gleich der zeitlichen Ableitung
der Stufen-Antwort-Funktion ist,
d.h. die Kenntnis von g(t) reicht, um die Antwort auf
beliebige Eingangsfunktionen zu berechnen. Hier
bezeichnet ∗ das Faltungsintegral.
h(t) = ġ(t).
2.2.6 Allgemeine Anregungsfunktion
Abbildung 2.18: Zerlegung eines Pulses in eine Differenz von 2 Stufenfunktionen.
Abbildung 2.19: Zerlegung eines Pulses in eine Folge von Rechtecken.
Wir betrachten zunächst einen rechteckförmigen
Spannungspuls U1 (t). Um diesen auf die bekannte Stufenfunktion zurückzuführen, zerlegen wir ihn
in eine Differenz aus zwei Stufenfunktionen im Abstand ∆t. Das Ausgangssignal kann in den drei Perioden geschrieben werden als
Dementsprechend können wir eine beliebige Funktion U1 (t) zerlegen in eine Reihe von Rechtecken. Ohne Beschränkung der Allgemeinheit nehmen wir an,
dass U1 (t ≤ 0) = 0. Die Systemantwort kann somit
geschrieben werden als Summe über die Antworten
auf die einzelnen Stöße,
1. U2 (t) = 0
n
U2 (t) = ∑ U1 (τi )h(t − τi )∆t.
2. U2 (t) = +U0 g(t)
i=1
3. U2 (t) = −U0 g(t) +U0 g(t + ∆t),
Im Grenzfall ∆t → 0 geht die Summe in ein Integral
über,
wobei der Ursprung der Zeit-Achse in jedem Bereich
an den Anfang des Bereichs gelegt wurde.
Z t
U2 (t) =
Wir betrachten jetzt den Bereich 3 im Grenzfall kurzer Pulse ∆t → 0. Hier gilt
U2 (t) = U0 (g(t + ∆t) − g(t)) = U0
−∞
U1 (τ)h(t − τ)dτ.
Dies kann auch vereinfacht geschrieben werden als
∆g
∆t.
∆t
U2 (t) = U1 (t) ∗ h(t)
16
2 Grundlagen
das mehrere Frequenzkomponenten enthält, gilt die
Beziehung für alle Komponenten einzeln,
oder, äquivalent,
U2 (t) = h(t) ∗U1 (t).
h(t) ∗ ∑ ai eiωit = ∑ ai eiωit H(ωi ) .
Das Ausgangssignal ist somit gegeben durch die
Faltung des Eingangssignals mit der Impulsantwort
h(t). Dies kann man auch intuitiv verstehen: wir
zerlegen in Gedanken das Einganggsignal in viele
kleine Impulse, welche jeweils einen Signalbeitrag
∝ h(t − τi ) liefern.
Im Grenzfall vieler Frequenzkomponenten schreiben wir das Eingangsignal als Integral,
Z
U1 (t) =
Z
U2 (t) =
Als Impulsantwort h(t) bezeichnet man die Antwort
des Systems auf eine impulsartige Störung, welche mathematisch durch die Deltafunktion δ (t) beschrieben wird. In der Praxis kann man diese durch
einen Puls von kurzer Dauer ∆t approximieren. Im
Grenzfall ∆t → 0 spielt nur noch die Fläche des Pulses eine Rolle.
U2 (t) = h(t) ∗U1 (t) = F −1 {u2 (ω)H(ω)}.
Dies ist ein Spezialfall des allgemeinen Faltungstheorems:
a(t) ∗ b(t) ↔ A(ω)B(ω).
H(ω) = F {h(t)}.
2.3 Kirchhoff’sche Sätze
Um diese Beziehung zu beweisen, betrachten wir zunächst eine einzelne Frequenzkomponente,
Die Kirchhoffschen Sätze bilden die wichtigste
Grundlage für die Analyse von elektronischen
Schaltungen. Sie sind bekannt als Knotenregel und
Maschenregel.
U1 (t) = eiωt .
Das transmittierte Signal kann berechnet werden als
das Faltungsintegral mit der Impulsantwort h(t):
h(τ)eiω(t−τ) dτ = eiωt
Z
h(τ)eiωτ dτ.
2.3.1 Knotenregel
Wir betrachten einen Knoten von n Leitungen, in denen Ströme Ii fließen. Da Ladung eine Erhaltungsgröße ist und sie im Knoten weder erzeugt noch vernichtet werden kann, muss die Summe der hineinfließenden Ströme gleich der Summe der abfließenden Ströme sein:
Wir erhalten offenbar das harmonische Eingangssignal wieder, multipliziert mit
Z
H(ω) =
a(ω)H(ω)eiωt dt = F {u1 (ω)H(ω)}.
Anstelle der Berechnung des Faltungsintegrals können wir somit das Eingangssignal in den Frequenzraum transformieren und dort mit H(ω) multiplizieren. Das Produkt wird wiederum in den Zeitbereich
transformiert:
Eine der wichtigsten Beziehungen ist die zwischen
der Übertragungsfunktion H(ω) und der Impulsantwort h(t): diese bilden eine Fourier-Transform Paar:
Z
a(ω)eiωt dt = F {u1 (ω)},
mit a(ω) = u1 (ω) als der Fouriertransformierten des
Eingangssignal. Das Ausgangssignal wird dann
2.2.7 Impulsantwort und Faltungstheorem
h(t)∗eiωt =
i
i
h(τ)eiωτ dτ = F {h(t)}.
Dieser Faktor entspricht offenbar der Fouriertransformierten der Impulsantwort h(t),
n
∑ Ii = 0.
H(ω) = F {h(t)} = F {ġ(t)}.
i=1
Hierbei muss das Vorzeichen der Ströme mitgenommen werden: das Vorzeichen ist positiv für Ströme,
die in den Knoten hineinfließen, negativ für abfließende Ströme.
Diese Beziehung gilt für alle monochromatischen
Signale. Für ein Signal
U1 (t) = a1 eiω1t + a2 eiω2t + a3 eiω3t + ... ,
17
2 Grundlagen
Vorlesung "ELEKTRONIK"
Prof. Dr. Klaus Wille
I
U
Abbildung 2.22: Beispiel eines Zweipols
ferenz U zwischen den beiden Polen und der Strom
I.
Abb. 1.13 Die Knotenregel für den Strom
Abbildung
2.20:hereinLeitungen
laufen inStrom
einem
Knoten
Für den in einen
Knoten insgesamt
und herausfließenden
gilt immer
zusammen.
Ii 0 .
Man (1.7)
unterscheidet verschiedene Arten von Zweipolen, z.B.
i
Das ist eine notwendige Folge der Ladungserhaltung.
2.3.2 Maschenregel
• linear : Es existiert eine lineare Beziehung zwischen Strom und Spannung
#$%&
• passiv : I = 0 für U = 0, d.h. ohne äußere Spannung fließt kein Strom
• aktiv : I 6= 0 ist möglich für U = 0. Beispiele
sind Batterien, Stromquellen etc.
%'
(t)
!"
2.4.2 Satz von Helmholtz
Abb. 1.14 Die Maschenregel für die Spannung
(t*$%+
In einem geschlossenen Stromkreis („Masche“) verschwindet die Summe aller Spannungen
Ui
0.
Original
Ersatzschaltbilder
(1.8)
i
Abbildung 2.21: Beispiel einer Masche
Wäre das nicht der Fall, dann würde zumindest lokal der Strom über alle Grenzen steigen.
1.5 Einfache
Schaltungen
passiven
Bauelementen
Die
Spannungmit
kann
als Differenz
zwischen 2 PoDurch einfachtenzialen
Kombinationen
von
passiven
Bauelementen
eine Reihe wichtiger
verstanden werden,
Uik = Φkentstehen
− Φi . Daraus
Grundschaltungen, von denen im folgenden einige der wichtigsten behandelt werden sollen.
folgt, dass die Summe der Spannungen im einem geKreis verschwinden muss,
1.5.1 Tief- und
Hochpässe
schlossenen
n Widerstand und einen Kondensator, bzw. einen Widerstand und eine Spule
Wenn man jeweils einen
Abbildung
0.
i =Schaltung
kombiniert, erhält man je U
nach
einen Tief- oder einen Hochpaß.
∑
i=1
Auch hier ist das Vorzeichen wichtig: alle Spannungen müssen in die gleiche Richtung gemessen wer-9den.
2.23: Ursprüngliche Schaltung (links)
und dazu äquivalente Ersatzschaltbilder (rechts).
Jeder aktive Zweipol, bestehend aus einem beliebigen Netzwerk von Quellen und Widerständen, verhält sich für einen externen Beobachter gleich wie
ein einfacher Zweipol, bestehend aus einer
2.4 Zweipole
• Ersatzstromquelle mit Leerlaufspannung U0
und Serieninnenwiderstand Ri (Léon Charles
Thévenin, 1883)
2.4.1 Definition
Ein Zweipol ist ein Netzwerk mit 2 Anschlüssen. Die
wichtigsten Charakteristika sind die Spannungsdif-
oder einer
18
Experimente zur Untersuchung der Festkörperstrukturen an Reaktoren
(Neutronenstreuung) oder Elektronenspeicherringen mit Synchrotronstrahlung.
Konstanthaltung wichtiger Parameter im Experiment (Regelkreis)
Beispiele:
Konstanthaltung der Umgebungstemperatur einer Festkörperprobe
Konstanthaltung von Spannung und Strom
Konstanthaltung eines Magnetfeldes
2 Grundlagen
Wie man schon an diesen wenigen Beispielen sehen kann, gibt es in der Physik heute praktisch kein
Experiment mehr, das ohne Einsatz von Elektronik auskommt.
Die Elektronik ist heute eines der wichtigsten experimentellen Mittel zur
• Ersatzspannungsquelle mit
Kurzschlussstrom
Erfassung und Aufbereitung fast aller physikalischer Meßgrößen.
Ri
I0 und (gleich großem) Parallelinnenwiderstand
1.2 SpannungsRi (Edward Lawry Norton,
1926).und Stromquellen
I
Eine ideale Spannungsquelle liefert an das Experiment eine wohldefinierte, konstante Spannung U
ab, dieZweipolen
nicht von dem jeweils
Strom abhängt.
Die Kennlinie von allen drei
istfließenden
die gleiche.
dU
dI
Ri
0
U
Last
d.h. der Innenwiderstand Ri verschwindet, oder
anders ausgedrückt, die Spannung ist unabhängig
von der Last.
2.5 Quellen
Abb. 1.1 Ideale Spannungsquelle
2.5.1 Ideale Quellen
Eine ideale Stromquelle liefert an das Experiment einen wohldefinierten, konstanten Strom I ab,
der nicht von der jeweiligen Ausgangsspannung abhängt.
Abbildung 2.25: Ersatzschaltbild für eine reale
Spannungsquelle: gestrichelte Box.
I
U
dU
dI
Ri
UK
UR0 übersteigt
Innenwiderstand
Last
d.h. der
alle
i
Grenzen, oder anders ausgedrückt, der Strom ist
unabhängig von der Last.
Kurzschluss
Abb. 1.2 Ideale Stromquelle
In der Praxis lassen sich ideale Spannungs- und Stromquellen allerdings nicht realisieren. Die beste
Abbildung 2.24: Ideale Spannungsquelle
und ideale
Spannungsquelle hat immer noch einen, wenn auch kleinen, von Null verschiedenen Innenwiderstand.
Ebenso bleibt der Innenwiderstand einer Stromquelle immer endlich,
Stromquelle.
0 wenngleich auch mit großen
Werten.
0
Vorlesung
"ELEKTRONIK"
Reale Spannungs- und Stromquellen können durch Ersatzschaltbilder beschrieben werden, bei denen
der idealen Quelle ein entsprechender Widerstand in Reihe bzw. parallel geschaltet wird.
Ia
Pro
Eine ideale Spannungsquelle erzeugt eine feste
Reale Spannungsquelle
2.26: Klemmspannung als Funktion des
Spannung, unabhängig von der daran angeschlosse- - 4 -Abbildung
Ausgangsstroms.
nen Last; dafür muss der Strom jeweils and die Impedanz der Last angepasst werden. Bei einer idealen
dU
Spannungsquelle ist entsprechend der Strom kondI
Die Leerlaufspannung U0 wird somit über den beistant, die Spannung muss entsprehend erhöht werden Widerständen Ri und Ra geteilt. Der maxider Innenwiderstand R
den, wenn der Lastwiderstand zunimmt. Offensichtmale Strom wird erreicht beim Kurzschlussstrom
klein (Ri < 1 )
lich ist es nicht möglich, solche idealen Quellen für
I0 = U0 /Ri . Eine ideale Spannungsquelle erhält man,
einen beliebig großen Parameterbereich zu bauen.
wenn der Innenwiderstand verschwindet, Ri → 0.
2.5.2 Reale Spannungsquelle
2.5.3 RealeAbb.
Stromquelle
1.3 Reale Spannungsquelle
Reale Stromquelle
Eine reale Spannungsquelle kann als Kombination einer idealen Spannungsquelle (deren Ausgangsspannung unabhängig von der äußeren Last ist) und
einem Innenwiderstand Ri in Reihe betrachtet werden. Hier stellen U0 die Leerlaufspannung, Uk die
Klemmspannung, Ra den Lastwiderstand und Ri den
Innenwiderstand dar.
dU
dI
der Innenwiderstand R
groß (Ri > 1 M )
Die Klemmspannung ist abhängig vom Strom Ia ,
der aus dem Gerät hinausfließt, Uk = U0 − Ri Ia . Der
Strom Ia wiederum ist abhängig vom Lastwiderstand
Ra : Ia = Uk /Ra . Einsetzen und Auflösen nach Uk ergibt
Ra
Uk = U0
.
Ra + Ri
Abb. 1.4 Reale Stromquelle
Abbildung
2.27: Ersatzschaltbild
für eine
reale
Spannungsquellen
gibt es für zeitlich
konstante
Spannungen wie a
Spannungen. Stromquelle.
Entsprechende Geräte sind auch für zeitlich konstante un
verfügbar. Am Beispiel der Spannungsquellen seien im folgende
Bei der
realen Spannungsquelle
der Innenwiderdardspannungen
aufgelistet. GanzistAnaloges
gilt auch für Stromquellen.
Gleichspannung („Labornetzgeräte“)
19
Gleichspannungen dienen zur allgemeinen Versorgung von elektronischen
betriebenen Komponenten in Experimenten. Für sie gilt
U (t ) U 0
const.
oder
dU
dt
0.
Um diese Bedingung zu erreichen, verfügen diese Geräte über Regelkrei
Spannung und über Filter zur Unterdrückung von Wechselspannungsant
2 Grundlagen
IK
stand Ri parallel zur idealen Stromquelle geschaltet. Dadurch wird der Ausgangsstrom I0 der idealen
Quelle geteilt: I0 = Ia + Ii : ein Teil Ii fließt über den
Innenwiderstand ab, ein anderer (möglichst großer)
Teil Ia über den Lastwiderstand Ra . Der Innenwiderstand sollte in diesem Fall möglichst hoch sein, d.h.
bei einer idealen Stromquelle gilt Ri → ∞. Der Ausgangsstrom sinkt mit zunehmender Klemmspannung
UK und abnehmendem Innendwiderstand Ri :
IA
UA
Abbildung 2.29: Graphische Lösung
Leistungsanpassung.
UK
Ia = I0 −
.
Ri
Ra
Ri
Ra
) = I0 .
Ri
Aufgelöst nach Ia :
Ia (1 +
die
Die Lösung erhält man geometrisch (siehe Abbildung 2.29) oder algebraisch. Bei der geometrischen
Lösung erhält man die Leistung als Produkt aus
Strom und Spannung, d.h. als die Fläche des eingefärbten Rechtecks. Diese wird maximal wenn Strom
und Spannung jeweils die Hälfte ihres Maximalwerts
errreichen.
oder
Ia (1 +
für
verschwindet diese bei offenem Anschluss (Strom
verschwindet) und bei Kurzschluss (Spannung verschwindet). Dazwischen existiert ein Maximum.
Die Klemmspannung ist das Produkt aus Widerstand
und Strom, UK = Ra Ia , d.h.
Ia = I0 − Ia
UK
Ra
Ri
) = I0 .
.
Ri
Ri + Ra
Für die algebraische Lösung berechnen wir zuerst
die Leistung
Uk2
1
RaU0 2
P=
=
.
Ra
Ra Ra + Ri
Er verschwindet, wenn der Lastwiderstand unendlich hoch wird, Ra → ∞, d.h. wenn die Klemmspannung
Um diese zu maximieren, berechnen wir die Ableitung
UK = Ri I0 = U0
dP
= 0 → Ra = Ri .
dRa
wird.
Daraus folgt
2.5.4 Leistungsanpassung
1
Pmax =
Ri
Ri
Ra
U0
2
2
=
U02
.
4Ri
2.6 Einfache Schaltungen
2.6.1 Wheatstone Brücke
Abbildung 2.28: Aktiver Zweipol mit Last
Die Wheatstone Brücke dient dazu, Widerstände zu
messen. Dazu gleicht man die Schaltung so ab, dass
kein Strom durch das Messgerät zwischen den Knoten C und D fließt. Die Schaltung ist aus drei Maschen aufgebaut. Wenn wir auf jede dieser Maschen
Ein typisches Problem bei der Beschaltung einer
Strom- oder Spannungsquelle ist die optimale Leistungsanpassung: man möchte die Leistung maximieren, welche über der Last abfällt. Offenbar
20
2 Grundlagen
Für den Strom durch das Messgerät erhält man
Im =
U0 (R2 R3 − R1 R4 )
,
N
mit
N = R1 R2 R3 + R1 R2 R4 + R1 R3 R4 + R2 R3 R4
+ R1 R3 Rm + R2 R3 Rm + R1 R4 Rm + R2 R4 Rm .
Offenbar verschwindet dieser dann, wenn R2 R3 =
R1 R4 . Da man den Strom sehr exakt auf 0 einregeln kann, erlaubt einem diese Anordnung, den unbekannten Widerstand R3 mit der Genauigkeit zu
bestimmen, mit der die Referenzwiderstände R1 , R2
und R4 bekannt sind.
Abbildung 2.30: Wheatstone Brücke
UG
die Maschenregel anwenden, erhalten wir die folgenden Beziehungen:
Z
ZProbe
UB
1. Masche : −U0 + R1 I1 + R2 I2 = 0
RRef
2. Masche : R3 I3 + Rm Im − R1 I1 = 0
Z
CRef
3. Masche : R4 I4 − R2 I2 − Rm Im = 0
Ausserdem wenden wir die Knotenregel an auf die Knoten
Abbildung 2.31: Wheatstone Brücke für komplexe
Impedanzen
• A, B : Iges = I1 + I3 = I2 + I4
Das Prinzip kann veralgemeinert werden auf komplexe Impedanzen, indem man an Stelle eines Referenzwiderstandes eine komplexe Impedanz, z.B. bestehend aus einem Widerstand und einem Kondensator, einsetzt.
• C : I1 + Im = I2
• D : I3 = Im + I4
Somit haben wir ein System von Gleichungen für die
5 Ströme, das wir in Matrixform schreiben können,
Autokompensationsbrücke
~ :
(M)~I = U
−R1
0
R3 0 −Rm
0
−R2 0 R4 Rm
R1
R2
0
0
0
1
−1 0
0
−1
0
0
1 −1
1
I1
I2
I3
I4
Im
=
0
0
U0
0
0
.
Die einzelnen Zeilen dieser Gleichung folgen aus
den Maschen 2, 3, 1 und aus den Knoten C, D. Die
Gleichung kann nach den Strömen aufgelöst werden
Abbildung 2.32: Automatisierte Messbrücke
Das Vorgehen kann auch automatisiert werden: das
Gerät regelt die Referenzimpedanzen so, dass der
Messstrom verschwindet und berechnet daraus die
Impedanz der Last.
~I = M −1U.
~
21
2 Grundlagen
Die hier verwendete Analyse ist nicht die einzige
Möglichkeit. Algebraisch deutlich weniger aufwendig ist z.B. die folgende Betrachtung: R1 , R2 und
R3 , R4 bilden jeweils einen Spannungsteiler. Teilen
sie die Spannung U0 im gleichen Verhältnis,
verwenden:
(G1 + G4 + G2 )U1 − G2U2 = G1UA
−G2U1 + (G2 + G5 + G3 )U2 = G3UB
oder, in Matrixschreibweise, als
U1
IA
(G)
=
.
U2
IB
R1 R3
= ,
R2 R4
so haben die Punkte C und D das gleiche Potenzial und die Spannung über dem Messinstrument verschwindet. Dies is offensichtlich die gleiche Gleichug wie R2 R3 = R1 R4 .
Dieses Gleichungssystem kann mit den üblichen
Methoden der linearen Algebra gelöst werden.
2.6.3 Knotenanalyse für reaktives Netzwerk
2.6.2 Knotenanalyse für
Widerstandsnetzwerk
h29
Nach dem gleichen Prinzip können andere Netzwerke analysiert werden. So können wir z.B. Potenzial
an bestimmten Knoten berechnen:
U1
U2
UA
UB
U3 = 0
Abbildung 2.34: Reaktives Netzwerk
Abbildung 2.33: Netzwerk für Knotenanalyse
Das zweite Beispiel enthält neben Widerständen
auch reaktive Elemente (Kondensatoren und Spulen). Gesucht sind Rx und Lx so, dass der Strom
durch Ra verschwindet.
Wir bestimmen die Potenziale U1 und U2 , indem wir
die Knotenregel auf die beiden Punkte anwenden.
Da U3 = 0, ist dieser Knoten die Referenzspannung.
Allgemein erhält man bei n Knoten n − 1 Gleichungen.
Für zeitabhängige Spannungen existiert keine allgemeine Lösung, aber für harmonische Spannungen
existiert eine Lösung, welche von der Frequenz abhängt. Die Berechnung erfolgt analog, wir wenden
die Knotenregel auf Knoten 3 an, wobei die Elemente durch komplexe Impedanzen beschrieben werden:
Für den Knoten 1 erhalten wir
UA −U1 U3 −U1 U2 −U1
+
+
=0
R1
R4
R2
und am Knoten 2
IR + IC + IRa = 0.
U1 −U2 U3 −U2 UB −U2
+
+
= 0.
R2
R5
R3
Wir drücken die Ströme durch Spannungen und Impedanzen aus:
Dies lässt sich etwas kompakter schreiben, wenn wir
anstelle der Widerstände die Leitwerte Gi = 1/Ri
U3 −U1
U3
+ (U3 −U2 )iωC +
= 0.
R
Ra
22
2 Grundlagen
Umgeformt:
1
1
1
+ iωC +
U3 = 0.
− U1 − iωCU2 +
R
R
Ra
Wir führen jetzt die folgende Schreibweise ein:
G31U1 + G32U2 + G33U3 = 0.
Hier ist Gik der Leitwert zwischen den Knoten i und
k. Das Diagonalelement Gii = − ∑ Gik ist der Gesamtleitwert des i-ten Knotens. Die Leitwerkmatrix
ist symmetrisch, Gik = Gki . Für das gezeigte Netzwerk lautet sie
1
Ri
+ iωC +
−iωC
− R1
1
R
1
Rx
−iωC
1
+ iωL
+ 2iωC
x
−iωC
− R1
1
R
Abbildung 2.35: Ersatzschaltbild für einen realen
Widerstand.
G=
−iωC
+ iωC + R1a
Hier haben wir bereits verwendet, dass U4 = 0 und
die entsprechende Zeile / Kolonne wegelassen. Noch
nicht berücksichtig wurde der Strom, welcher aus
der Quelle über den Eingangswiderstand Ri hineinfließt. Wir addieren diesen auf der rechten Seite,
UL /Ri
GU = 0 .
0
2.7.1 Reale Widerstände
.
Ein einfaches Ersatzschaltbild, welches das Verhalten eines realen Widerstandes gut beschreibt, berücksichtigt z.B. Streukapazitäten zwischen den Elementen des Widerstandes, welche als parallel geschalteter Kondensator erscheinen, sowie die Induktivität der Zuleitungen, welche in Serie zum Widerstand erscheint.
Die Bedingung Ia = 0 ist dann äquivalent zu U3 = 0.
Diese Bedingung ist erfüllt, wenn
1
+ iωC + R1
−iωC
− URLi 1 Ri
1
1
U3 =
−iωC
0 = 0
Rx + iωLx + 2iωC
|G| 1
−R
−iωC
0 oder
Frequenzgang
bis 1 GHz
Abbildung 2.36: Der zugehörige Frequenzgang.
1
Rx = 2 2
ω C R
Die parallele Kapazität führt dazu, dass bei hohen
Frequenzen der Widerstand gegen 0 abfällt. Abbildung 2.36 zeigt das den zugehörigen Frequenzgang
auf einer logarithmischen Skala.
und
Lx =
1
.
2ω 2C
2.7 Reale Bauelemente
Abbildung 2.37 zeigt einige unterschiedliche Typen
von Widerständen. Bei den meisten handelt es sich
um Trimm-Potentiometer.
Reale Bauelemente weichen immer vom idealen
Verhalten ab. Hier werden einige typische Abweichungen diskutiert.
Bei den gängigsten Widerständen wird der Widerstandswert mit Hilfe von farbigen Ringen codiert:
die beiden ersten Ringe stehen für die beiden signi-
23
2 Grundlagen
Abbildung 2.37: Widerstandstypen.
Abbildung 2.39: Farbcode für Widerstände.
Abbildung 2.38: Farbcodierung von Widerständen.
fikanten Stellen, der dritte gibt die Zehnerpotenz an
(im Beispiel: 10 · 104 = 100 kΩ), und der vierte Ring
bezeichnet die Präzision.
Abbildung 2.40: Symbolde für unterschiedliche
Widerstandstypen.
Abbildung 2.39 zeigt den Farbcode, der für diese
Markierungen verwendet wird.
In Schaltschemen werden die unterschiedlichen Widerstandstypen durch die in Abbildung 2.40 gezeigten Symbole markiert.
Wichtige Kriterien für die Wahl eines Kondensators
sind die Kapazität, welche die Ladung begrenzt, welche darauf gespeichert werden kann, und die maximale Spannung. Die höchsten Kapazitäten werden
erreich mit Elektrolytkondensatoren, welche jedoch
nur bei relativ geringen Spannungen verwendet werden können.
2.7.2 Reale Kondensatoren
Bei realen Kondensatoren findet man immer endliche Widerstände parallel dazu, wie auch in den Zuleitungen. Wie bei den realen Widerständen muss
auch hier die Impedanz der Zuleitungen berücksichtigt werden.
Ein weiteres wichtiges Kriterium ist der Verlustfaktor. Dieser spielt insbesondere bei hohen Leistungen
und hohen Frequenzen eine wichtige Rolle.
In Schaltplänen werden die unterschiedlichen Typen
mit unterschiedlichen Symbolen bezeichnet. Abbildung 2.46 fasst die wichtigsten zusammen.
Dies führt u.a. dazu, dass die Impedanz für hohe Frequenzen wieder ansteigt.
Bei Kondensatoren existieren sehr unterschiedliche
Bauformen, welche unterschiedliche Eigenschaften
besitzen.
Die Beschriftung von Kondensatoren ist nicht einheitlich und deshalb oft verwirrend. So bedeutet die
Zahl ”473” 47 · 103 pF = 47 nF und der Ausdruck
24
2 Grundlagen
MKS: Styroflex = Polystyrol
kleiner
Verlustwinkel
Elko:
hohe
Kapazität
pro
Volumen
Abbildung 2.41: Realer Kondensator und passendes
Ersatzschaltbild.
24
Abbildung 2.43: Bauformen für unterschiedliche
Kondensatortypen.
Frequenzgang
log. Skala
bis 100 MHz
Abbildung 2.42: Frequenzgang
Kondensators.
eines
realen
”.33 K 250” steht für eine Kapazität von 0,33 µF =
330 nF, K bezeichnet eine Toleranz von 10%, und
250 die Spitzenspannung in Volt.
Abbildung 2.44: Spannungs- und Kapazitätsbereiche für unterschiedliche Arten von
Kondensatoren.
2.7.3 Reale Spulen
die beiden Elemente parallel geschaltet sind, geht die
Impedanz bei der Resonanz gegen unendlich.
Spulen besitzen einen endlichen Widerstand, welcher ausserdem frequenzabhängig ist, aufgrund des
Skin-Effektes: Ströme dringen nur bis zu einer Tiefe
Diese Resonanz ist im Frequenzgang gut erkennbar.
δskin =
Abbildung 2.49 zeigt einige unterschiedliche Typen
von Spulen.
2
ω µσ
in das Metall ein. Außerdem erhält man Verluste aufgrund der induzierten Magnetisierung und Wirbelströme.
Im Ersatzschaltbild 2.47 können diese Verluste
durch einen in Reihe geschalteten Widerstand berücksichtigt werden. Zwischen den Windungen einer
Spule existieren außerdem Streukapazitäten, welche als parallel geschalteter Kondensator beschrieben werden können. Die Kombination von Kapazität und Induktivität ergibt einen Schwingkreis. Da
25
2 Grundlagen
Abbildung 2.45: Verlustfaktoren für unterschiedliche Arten von Kondensatoren.
Ringkernspule
= Drossel
!
Abbildung 2.46: Symbole für unterschiedliche Arten von Kondensatoren.
Spule
mit Kern
10.7 MHz Bandfilter
Relaisspule
Wickelkörper mit
Ferritkern (HF-Spule)
Abbildung 2.49: Unterschiedliche Spulentypen.
Abbildung 2.47: Ersatzschaltbild für reale Spule.
Frequenzgang
bis 100 MHz
Abbildung 2.48: Frequenzgang einer realen Spule.
26