Relativistische Aspekte der klassischen Elektrodynamik
Werbung

Fakultät Elektrotechnik und Informationstechnik Elektrotechnisches Institut
Lehrstuhl für Theoretische Elektrotechnik und Elektromagnetische Verträglichkeit
Skript zur Vorlesung
Relativistische Aspekte
der klassischen Elektrodynamik
Prof. Dr. rer. nat. habil. Hans-Georg Krauthäuser
Mitschrift aus dem Sommersemester 2014
Version vom 16. März 2015
ii
Inhaltsverzeichnis
iii
Inhaltsverzeichnis
1 Einführung
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Paradoxa der elektromagnetischen Feldtheorie . . . . . . . . . . . . . . . . . . . .
1
1
1
2 Grundlagen der speziellen Relativitätstheorie
2.1 Geschwindigkeitsaddition . . . . . . . . .
2.2 Gleichzeitigkeit von Ereignissen . . . . . .
2.3 Zeitdilatation . . . . . . . . . . . . . . . .
2.4 Längenkontraktion . . . . . . . . . . . . .
2.5 Lorentz-Transformation . . . . . . . . . .
2.6 Addition von Geschwindigkeiten . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
4
5
7
8
9
3 Der
3.1
3.2
3.3
3.4
Minkowski-Raum
Die Struktur der Raumzeit . . .
Intervalle zwischen Ereignissen
Minkowski-Diagramme . . . . .
Kausalität . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
11
12
14
15
4 Relativistische Mechanik
4.1 Eigenzeit und Eigengeschwindigkeit
4.2 Energie und Impuls . . . . . . . . .
4.3 Grenzgeschwindigkeit . . . . . . . .
4.4 Vierervektor der Kraft . . . . . . .
4.5 Impulsbetrachtung . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
17
17
19
23
24
25
5 Relativistische Elektrodynamik
5.1 Transformation der Felder . . . . . . . . . . . . . . . . . . .
5.2 Der Feldstärketensor . . . . . . . . . . . . . . . . . . . . . .
5.3 Kontinuitätsgleichung in Viererschreibweise . . . . . . . . .
5.4 Maxwellsche Gleichungen in Viererschreibweise . . . . . . .
5.5 Viererpotentiale und Lorenz-Eichung . . . . . . . . . . . . .
5.6 Minkowskikraft . . . . . . . . . . . . . . . . . . . . . . . . .
5.7 Induktionsgesetz aus Sicht der speziellen Relativitätstheorie
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
27
29
34
35
36
37
38
39
A Formelsammlung
.
.
.
.
43
iv
Inhaltsverzeichnis
KAPITEL 1. EINFÜHRUNG
1
1 Einführung
1.1 Motivation
Spezielle Relativitätstheorie (Albert Einstein, 1905)
Aussage des Relativitätsprinzips, welches auf Galileo Galilei zurückgeht:
„Physik ist in allen Inertialsystemen gleich“
In einem Inertialsystem gilt ~v = const. bzw. ~a =
d~v
dt
=0
1.2 Paradoxa der elektromagnetischen Feldtheorie
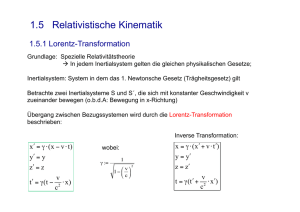
Beispiel 1.1 (Elektrodynamik)
Betrachtet werde eine bewegte elektrische Probeladung q in der Nähe eines Gleichstromes I,
der von sich mit der Driftgeschwindigkeit vDrift bewegenden Ladungsträgern gebildet wird (Abbildung 1.1). Infolge des vom Strom hervorgerufenen Magnetfeldes wirkt eine Kraft auf die
Probeladung.
~ ⊗
H
-
-
~vDrift
-
-
-
-
Gleichstrom I
¯
+
Probeladung q
Abbildung 1.1: Anordnung eines elektrischen Gleichstromes und einer Probeladung
Bei Relativbewegung eines Hallsensors mit der Driftgeschwindigkeit vDrift in Richtung der Ladungen im Leiter stellt man fest, dass dies zu einem Verschwinden des vom Strom verursachten
Magnetfeldes führt.
2
KAPITEL 1. EINFÜHRUNG
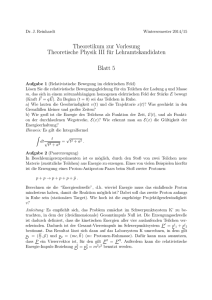
Beispiel 1.2 (Induktionsgesetz)
~ bei zeitlicher Änderung
Laut Faradayschem Induktionsgesetz gilt für das elektrische Feld E
~
der magnetischen Flussdichte B
~
~ = − ∂B
rot E
∂t
Betrachtet werde eine mit der konstanten Geschwindigkeit v in einem statischen Magnetfeld
bewegte Leiterschleife gemäß Abbildung (1.2).
~ = B0~ez
B
¯
¯
¯
¯
¯
¯
¯
¯
¯
~v
% UInd
Abbildung 1.2: Induktionsspannung in einer im Magnetfeld bewegten Leiterschleife
~
~ = 0, also auch UInd = 0. Diese Schlussfol• Im Laborsystem L ist ∂∂tB = 0 und damit rot E
gerung ist jedoch falsch
~
~ 6= 0 und UInd 6= 0,
• Im mitbewegten Bezugssystem L’ ist wegen ∂∂tB 6= 0 nämlich auch rot E
was sich durch Experimente bestätigen lässt
³
´
~ auf
Erklärbar wird dieser vermeintliche Widerspruch durch die Lorentz-Kraft F~ = q ~v × B
die Ladungsträger im Leiter.
Fragen:
• Welche Geschwindigkeit ist ~v (bezüglich welches Referenzsystems)?
• Was bedeutet überhaupt Geschwindigkeit?
• Gibt es eine ausgezeichnete (absolute) Geschwindigkeit?
• Welches ist das Ausbreitungsmedium elektromagnetischer Wellen bzw. gibt es überhaupt
eines?
Hinweis auf Experimente von Michelson und Morley mit Interferometerapparatur zum Nachweis eines möglichen „Äthers“ als Ausbreitungsmedium.
Postulate Albert Einsteins:
(a) das Relativitätsprinzip besitzt Gültigkeit
(b) die Lichtgeschwindigkeit ist eine universelle Naturkonstante mit c =
√1
ε0 µ0
≈ 3 · 108 m/s
KAPITEL 2. GRUNDLAGEN DER SPEZIELLEN RELATIVITÄTSTHEORIE
3
2 Grundlagen der speziellen
Relativitätstheorie
2.1 Geschwindigkeitsaddition
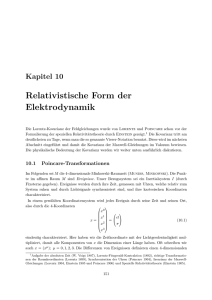
Gedankenexperiment 2.1 (Einsteinzug (klassisch))
Man betrachte zunächst einen mit der konstanten Geschwindigkeit vB fahrenden Zug und einen
Passagier, welcher sich selbst mit der Geschwindigkeit vA im Zug fortbewegt sowie den ruhenden
Beobachter auf dem Bahndamm (vC = 0).
A
~vA
~vB
B
—
—
—
Bahndamm
C
Abbildung 2.1: Gedankenexperiment zur klassischen Geschwindigkeitsaddition
Es ist vAB die Geschwindigkeit von A relativ zu B und vBC die Geschwindigkeit von B relativ
zu C. Klassisch berechnet man durch Addition die Relativgeschwindigkeit von A bezüglich C zu
vAC = vAB + vBC .
Gedankenexperiment 2.2 (Einsteinzug (relativistisch))
Betrachten nun einen mit der Geschwindigkeit vB fahrenden Zug, welcher ein Lichtsignal der
Geschwindigkeit vA = c in Bewegungsrichtung aussendet.
B
—
—
~vB
~vA
Bahndamm
C
Abbildung 2.2: Gedankenexperiment zur relativistischen Geschwindigkeitsaddition
Ein ruhender Beobachter auf dem Bahndamm misst ebenso wie ein Passagier des Zuges die
!
Lichtgeschwindigkeit als Relativgeschwindigkeit des Signals (vAB = vAC = c). Somit gilt hier
also vAC 6= vAB + vBC , d.h. die Geschwindigkeiten können nicht einfach wie im klassischen Fall
addiert werden.
Beide Fälle lassen sich schließlich durch
vAC =
vAB + vBC
1 + vABc2vBC
(2.1)
vereinheitlichen, d.h. für Geschwindigkeiten vAB , vBC , welche klein gegenüber der Lichtgeschwindigkeit c sind, folgt wieder die klassische Geschwindigkeitsaddition.
4
KAPITEL 2. GRUNDLAGEN DER SPEZIELLEN RELATIVITÄTSTHEORIE
2.2 Gleichzeitigkeit von Ereignissen
Definitionsgemäß beschreibt der Begriff Ereignis einen Zustand an einem bestimmten Ort des
Raumes zu einem bestimmten Zeitpunkt. Ein Ereignis ist dementsprechend durch drei Raumkoordinaten - z.B. (x, y, z) - und die zeitliche Koordinate t gekennzeichnet.
Gedankenexperiment 2.3 (Bewegte Lichtsignalquelle)
Betrachtet wird in einem Gedankenexperiment ein fahrender Zugwagon der Länge L mit mittig
angebrachter Lichtquelle, welche einen kurzen Lichtpuls aussendet. Die Wellenfront breitet sich
von der Quelle in alle Raumrichtungen aus, wobei Ereignis A das Eintreffen des Pulses am
hinteren Ende des Wagens bei x = 0 und Ereignis B das Empfangen des Pulses am vorderen
Teil bei x = L sei.
~v
N
A
0
L/2
B
L
x
Abbildung 2.3: Gedankenexperiment zur Gleichzeitigkeit von Ereignissen
• Ein Beobachter im Zug registriert beide Ereignisse als gleichzeitig, da das Licht jeweils
die gleiche Strecke ∆x = L/2 zurücklegt
• Der ruhende Beobachter auf dem Bahndamm stellt fest, dass aufgrund der Bewegung
des Wagens Ereignis A zeitlich vor Ereignis B eintritt, da sich der Zug der rückwärtig
laufenden Wellenfront entgegen bewegt, während sich die vordere Wand vom vorwärts
propagierenden Lichtpuls entfernt.
Es folgt also die Relativität der Gleichzeitigkeit als Konsequenz der Forderung bzw. des Postulats,
dass die Lichtgeschwindigkeit c in allen Inertialsystemen gleich ist. Mit anderen Worten hängt
die Gleichzeitigkeit von Ereignissen von der Wahl des Bezugssystems ab.
KAPITEL 2. GRUNDLAGEN DER SPEZIELLEN RELATIVITÄTSTHEORIE
5
2.3 Zeitdilatation
Von Beobachtern in verschiedenen Bezugssystemen, die sich mit der Relativgeschwindigkeit v zueinander bewegen, wird das Zeitintervall zwischen zwei Ereignissen im Allgemeinen unterschiedlich gemessen. Dies bezeichnet man auch als Zeitdehnung bzw. Zeitdilatation. Hierzu folgendes
Gedankenexperiment:
Gedankenexperiment 2.4 (Zeitdilatation)
Man betrachte einen sich mit der Geschwindigkeit v bewegenden Zugwagon der Höhe h, von
dessen Boden eine Lichtquelle einen Impuls nach oben aussendet. Dort wird das Eintreffen des
Lichtimpulses von einem Sensor registriert.
~v
L’
h
L
N
Abbildung 2.4: Gedankenexperiment zur Zeitdilatation in bewegten Bezugssystemen
Die Zeit bis zum Erreichen des Sensors misst
der Beobachter in L0 als
s0
h
=
c p
c
h2 + (v∆t)2
s
∆t =
=
¡c
¢ c
h2 = c2 − v 2 ∆t2
∆t0 =
ein Beobachter in L als
→
Nach Umstellen und Umformen erhält man
∆t = √
h
1
h
1
= q
= ∆t0 q
¡
¢
¡ ¢2
2
c
c2 − v 2
1− v
1− v
c
c
Zur Vereinfachung wird für den Wurzelterm die Größe γ eingeführt
1
γ=q
¡ ¢2
1 − vc
(2.2)
Dabei gilt in den beiden Extremfällen des ruhenden Bezugssystems (v = 0) γ = 1 und für ein
mit v → c bewegtes Inertialsystem entsprechend γ → ∞. Somit lässt sich also schreiben
∆t = γ∆t0
bzw.
∆t0 =
1
∆t
γ
(2.3)
wobei ∆t die bewegte Zeit und ∆t0 die Ruhezeit ist. Als Quintessenz dieses Beispiels kann man
auch formulieren, dass „bewegte Uhren langsamer laufen“.
6
KAPITEL 2. GRUNDLAGEN DER SPEZIELLEN RELATIVITÄTSTHEORIE
Beispiel 2.1 (Lebensdauer von Myonen)
Eine experimentelle Bestätigung des beschriebenen Effektes der Zeitdehnung ist z.B. durch die
Betrachtung der Lebensdauer atmosphärisch erzeugter Myonen (µ− ) möglich. Diese instabilen
Elementarteilchen entstehen als Folge von Wechselwirkungen kosmischer Strahlung mit der
Erdatmosphäre in circa 9 − 12 km Höhe und besitzen eine mittlere Lebensdauer von τ = 2 µs.
Eine Abschätzung der zurückgelegten Wegstrecke bei Bewegung der Teilchen mit Lichtgeschwindigkeit liefert eine Distanz von
hlic = cτ = 3 · 108 · 2 · 10−6 m = 600 m
d.h. es müssten deutlich weniger Myonen auf der Erdoberfläche detektiert werden, als dies eigentlich der Fall ist. Eine Erklärung dieser Diskrepanz ist mithilfe der Zeitdilatation im bewegten
Bezugssystem der Myonen möglich. Für den Fall v = 53 c beispielsweise beträgt die Lebensdauer
nun nämlich
τ
5
τ 0 = γτ = q
¡ 3 ¢2 = 4 τ = 2,5 µs
1− 5
Gedankenexperiment 2.5 (Zwillingsparadoxon)
Ein weiteres Gedankenexperiment hierzu ist das sogenannte Zwillingsparadoxon. Hierin verbleibt ein Zwilling als ruhender Beobachter auf der Erde, während der andere in einem Raumschiff mit der Geschwindigkeit v nahe Lichtgeschwindigkeit c auf die Reise geht. Nach einiger
Zeit kehrt der Reisende mit der gleichen Geschwindigkeit zur Erde zurück und anhand eines
Vergleiches stellt man fest, dass dieser gegenüber dem Daheimgebliebenen weniger gealtert ist,
da für ihn aufgrund der Zeitdilatation die Zeit langsamer verging.
Die gleiche Argumentation ist jedoch auch aus Sicht des anderen Zwillings möglich, da die
Bezugssysteme sich relativ zueinander bewegt haben und keines von beiden als ausgezeichnet
gelten kann. Auflösen lässt sich das Paradoxon damit, dass der bewegte Zwilling bei seiner Reise
keine gleichförmige Bewegung ausführt, sondern Beschleunigungen am Umkehrpunkt erfährt,
damit also das Inertialsystem wechselt. Die Zwillinge sind damit keineswegs als gleichwertig zu
betrachten
KAPITEL 2. GRUNDLAGEN DER SPEZIELLEN RELATIVITÄTSTHEORIE
7
2.4 Längenkontraktion
Aus der gleichen Überlegung wie für die Lebensdauer der Myonen im bewegten Bezugssystem
ist auch eine Verkürzung der Flugstrecke der Teilchen denkbar. Hierzu folgendes Gedankenexperiment:
Gedankenexperiment 2.6 (Längenkontraktion)
Betrachtet werde ein mit der Geschwindigkeit v fahrender Zugwagon der Länge ∆x0 , an dessen
hinterer Wand eine Lichtquelle und ein optischer Sensor angebracht sind. Von der Quelle wird
ein kurzer Impuls in Bewegungsrichtung zu einem an der gegenüber liegenden Wand befindlichen
Spiegel ausgesendet, von diesem reflektiert und bei Erreichen des Sensors schließlich detektiert.
~v
L’
N
L
∆x0
Abbildung 2.5: Gedankenexperiment zur Längenkontraktion in bewegten Bezugssystemen
Für die Zeitdauer zwischen Aussendung und Detektion des Impulses gilt
in L0
in L
∆x0
∆t
=2
γ
c
∆x+v∆t1
∆x
∆t1 =
→ ∆t1 =
c
c−v
∆x−v∆t2
∆x
∆t2 =
→ ∆t2 =
c
c+v
¶
µ
1
1
2c∆x
∆t = ∆t1 +∆t2 = ∆x
+
= 2 2
c−v c+v
c −v
2∆x
2∆x 2 ! ∆x0
³ ¡ ¢ ´=
=
γ =2
γ
2
c
c
c 1− v
∆t0 =
c
Insgesamt folgt hieraus die Beziehung
1
∆x0 = γ∆x = ∆x q ¡ ¢
2
1− vc
(2.4)
zwischen der Ruhelänge ∆x0 und der bewegten Länge ∆x. Analog zum Gedankenexperiment
der Zeitdilatation lässt sich hier formulieren, dass „bewegte Maßstäbe kürzer sind“.
8
KAPITEL 2. GRUNDLAGEN DER SPEZIELLEN RELATIVITÄTSTHEORIE
2.5 Lorentz-Transformation
Gemäß Definition im Abschnitt 2.2 ist ein Ereignis durch die drei Raumkoordinaten (x, y, z) des
Ortes und den Zeitpunkt t bestimmt. Häufig wird dies gemeinsam in Form des Vierer-Tupels
(x, y, z, t) notiert. Entsprechend schreibt sich dieses Tupel in einem bewegten Bezugssystem L0
als (x0 , y 0 , z 0 , t0 ). Man betrachte im Folgenden den Fall, dass sich das System L0 gegenüber dem
ruhenden Bezugssystem L in x-Richtung mit der Geschwindigkeit ~v = v~ex bewegt.
L
L’
y
y0
~v
vt
d
O
O’
E
A’
x
x0
z
z0
Abbildung 2.6: Relativbewegung zweier Inertialsysteme zueinander
• zum Zeitpunkt t = 0 gilt:
x0 = x, y 0 = y, z 0 = z
• zum Zeitpunkt t > 0 gilt:
x0 = d, x = d + vt
Es gilt also im klassischen Fall kleiner Geschwindigkeiten v ¿ c die Galilei-Transformation
x0 = x − vt ,
y0 = y
,
z0 = z
,
t0 = t
Was passiert aber allgemein bei relativistischen Geschwindigkeiten mit der Distanz d? Gilt für
diese weiterhin x0 = d? Es entspricht d der Entfernung O0 A0 , gemessen im Laborsystem L und x0
der Entfernung O0 A0 , gemessen im bewegten System L0 . Die Punkte O’ und A’ sind im System
L0 in Ruhe, jedoch ist x0 bezüglich L ein bewegter Maßstab, d.h. es gilt
d=
1 0
x
γ
bzw.
x0 = γd
Mit x = d + vt erhält man somit die Beziehung
x0 = γ(x − vt)
Dies beinhaltet auch die klassische Galilei-Tansformation, denn für v ¿ c ist γ ≈ 1 und damit
wieder x0 = x − vt.
KAPITEL 2. GRUNDLAGEN DER SPEZIELLEN RELATIVITÄTSTHEORIE
9
Wechselt man den Standpunkt und betrachtet die Situation aus Sicht des bewegten Bezugssystems L0 (Abbildung 2.7), so folgt nun mit x0 = d0 − vt0 und d0 = γ1 x die Beziehung
x = γ(x0 + vt0 )
t0
L
x
!
− vt0 = γ(x − vt)
γ
³
vx ´
= γ t− 2
c
x0 =
→
L’
y
y0
~v
v t0
d0
O’
O
E
x0
x
x0
z
z0
Abbildung 2.7: Relativbewegung aus Sicht des bewegten Bezugssystems
Es ergeben sich die Lorentz-Transformationen schließlich zu
x = γ(x0 + vt0 )
x0 = γ(x − vt)
y = y0
y0 = y
z = z0
z0 = z
¶
µ
vx0
0
t=γ t + 2
c
³
vx ´
t0 = γ t − 2
c
2.6 Addition von Geschwindigkeiten
0
Es sei u = dx
dt die Geschwindigkeit im Laborsystem L. Für die differentielle Strecke dx und
das differentielle Zeitintervall dt0 im bewegten System L0 gilt dann mithilfe der LorentzTransformation
dx0 = γ(dx − vdt)
µ
¶
vdx
0
dt = γ dt − 2
c
und man erhält einen Ausdruck für die Geschwindigkeit u0 in L’ zu
u0 =
−v
dx0
dx − vdt · dt1 dx
u−v
=
= dt v dx =
0
vdx
dt
1 − vc2u
dt − c2
1 − c2 dt
(2.5)
10
KAPITEL 2. GRUNDLAGEN DER SPEZIELLEN RELATIVITÄTSTHEORIE
KAPITEL 3. DER MINKOWSKI-RAUM
11
3 Der Minkowski-Raum
3.1 Die Struktur der Raumzeit
Zur strukturellen Beschreibung der Raumzeit werden die Ortskoordinatenvektoren um den Zeitpunkt t eines Ereignisses erweitert, wobei durch Multiplikation mit der Lichtgeschwindigkeit c
hieraus eine Länge („zeitlicher Abstand“) formuliert wird. Man schreibt im Folgenden
³
³
v ´
v ´
x0 = c · t
x̄0 ≡ x00 =
b γ ct − x = γ x0 − x1
c
c
³
¡ 1
¢
v 0´
1
1
01
1
x =x
x̄ ≡ x =
b γ x − vt = γ x − x
c
x2 = y
x̄2 ≡ x02 =
b x2
x̄3 ≡ x03 =
b x3
x3 = z
Mit der Definition
β :=
wird hieraus dann
v
c
1
1
γ=q
¡ v ¢2 = p1 − β 2
1− c
→
0
γ
−γβ 0 0
x̄
x̄1 −γβ
γ
0 0
=
2
x̄ 0
0
1 0
0
0
0 1
x̄3
|
{z
}
0
x
x1
·
x2
x3
(3.1)
=:Λ
bzw. in Indexnotation mit ν als Spalten- und µ als Zeilenindex vereinfacht
µ
x̄ =
3
X
Λµν xν
(3.2)
Λµν āν
(3.3)
ν=0
Ein Vierervektor aν mit
µ
a =
3
X
ν=0
ist demnach ein Vektor mit einem definierten Transformationsverhalten. Der euklidische Raum
wurde durch Hinzunahme des zeitlichen Aspekts zu einem vierdimensionalen metrischen Raum
erweitert. Für diesen ist es zweckmäßig, einen Abstandsbegriff über ein Skalarprodukt einzuführen. Man definiert deshalb
aµ · bµ = αa0 b0 + a1 b1 + a2 b2 + a3 b3
(3.4)
Der erste Term enthält dabei den zusätzlichen Freiheitsgrad α. Die übrigen Terme repräsentieren das bekannte Skalarprodukt der Raumkoordinaten. Gefordert wird nun die Invarianz dieses
Abstandes bei Lorentz-Transformation zwischen verschiedenen Bezugssystemen durch
!
āµ b̄µ = aµ bµ
¢
¡
¢
¡
¡
¢
¢
α γ a0−βa1 γ b0−βb1 +γ a1−βa0 γ b1−βb0 +a2 b2 +a3 b3 = αa0 b0 +a1 b1 +a2 b2 +a3 b3
| {z } | {z } | {z } | {z }
¡
¡
2
0 0
=ā0
0 1
b̄0
¢
1 0
2 1 1
αγ a b −βa b −βa b +β a b
ā1
¡
2 1 1
b̄1
1 0
+ γ a b −βa b −βa0 b1+β 2 a0 b0
¢
= αa0 b0 + a1 b1
12
KAPITEL 3. DER MINKOWSKI-RAUM
Umgruppieren und Zusammenfassen der Terme liefert
¡ 2
¢
¡
¢
¡
¢
¡
¢
αγ +γ 2 β 2 a0 b0 − αγ 2 β +γ 2 β a0 b1 − αγ 2 β +γ 2 β a1 b0 + αγ 2 β 2 +γ 2 a1 b1 = αa0 b0 + a1 b1
Aus einem Koeffizientenvergleich ergibt sich schließlich die Bedingung
!
− γ 2 β(α + 1) = 0
→
(3.5)
α = −1
womit sich das Skalarprodukt für Vierervektoren über die Relation
aµ · bµ = −a0 b0 + a1 b1 + a2 b2 + a3 b3
(3.6)
definiert. Wegen α = −1 wählt man weiterhin folgenden Formalismus mit aµ = (a0 , a1 , a2 , a3 )
als sogenannten Kontravarianzvektor und aµ = (a0 , a1 , a2 , a3 ) als den entsprechenden Kovarianzvektor (mit tiefgestellter Indizierung):
a · b = aµ · bµ
µ
µ
=
3
X
ν
aν b =
ν=0
3
X
aν bν
ν=0
(3.7)
=: aν bν = aν bν = aµ bµ = aµ bµ
Die zweite Zeile nutzt hierbei die sogenannte Einsteinsche Summenkonvention, nach der man
über doppelte ko- bzw. kontravariante Indizes von 0 bis 3 summiert, ohne dass die Summenbildung explizit ausgeschrieben wird.
3.2 Intervalle zwischen Ereignissen
Es seien die beiden Ereignisse A und B durch
¡ 0 1 2 3¢
A:
xA , xA , xA , xA
und
B:
¡
x0B , x1B , x2B , x3B
¢
gegeben. Die Differenz zwischen den Koordinaten dieser Ereignisse ist definiert durch den Verschiebungs-Vierervektor
∆xµ = xµA − xµB
(3.8)
Das Intervall zwischen A und B ist mit dem im vorigen Abschnitt eingeführten Skalarprodukt
¡
¢2 ¡
¢2 ¡
¢2 ¡
¢2
I = (∆x)µ · (∆x)µ = − ∆x0 + ∆x1 + ∆x2 + ∆x3
= −c2 (∆t)2 + d2
(3.9)
wobei d der räumliche Abstand zwischen (xA , yA , zA )T und (xB , yB , zB )T ist. Dieses Intervall
kann wegen des Ausdrucks „−c2 “ auch negativ oder Null werden!
Wie verhält sich das derart definierte Intervall nun unter Lorentz-Transformation? Es ist
zwar
∆t̄ 6= ∆t
und
d¯ 6= d
d.h. die zeitlichen und räumlichen Abstände sind für sich betrachtet nicht Lorentz-invariant.
Allerdings gilt aufgrund der eingangs geforderten Eigenschaft des Skalarproduktes mit
I¯ = I
die Lorentz-Invarianz des Intervalls!
KAPITEL 3. DER MINKOWSKI-RAUM
13
Anhand einer Fallunterscheidung für I lassen sich nun folgende Begrifflichkeiten definieren:
(a) I < 0, dann folgt d2 < (c∆t)2 und man spricht von zeitartigen Ereignissen (z.B. zwei
Ereignisse treten am gleichen Ort, aber zu unterschiedlichen Zeitpunkten auf)
(b) I > 0, damit gilt d2 > (c∆t)2 und man nennt die Ereignisse raumartig (beispielsweise zwei
Ereignisse zur gleichen Zeit an unterschiedlichen Orten)
(c) I = 0, dann ist d2 = (c∆t)2 - diese Ereignisse bezeichnet man als lichtartig (z.B. Aussendung eines Photons und Registrierung in einem Detektor)
Bemerkung 3.1 (Bezeichnungsweise)
Beachte: Die Aussage bezüglich des Intervalls I ist eine absolute Aussage, da dieses Lorentzinvariant und somit unabhängig von der Wahl des Bezugssystems ist. Bei der Bezeichnung als
„gleichzeitig“ oder „am gleichen Ort“ handelt es sich dagegen um relative Aussagen, da diese
Beziehungen vom gewählten Inertialsystem abhängig sind!
zu a) zeitartige Ereignisse
Es existiert eine Geschwindigkeit v < c, sodass die Ereignisse A und B im bewegten Bezugssystem
L̄ am gleichen Ort stattfinden.
L̄
~v
A
d
∆t
B
L
zu b) raumartige Ereignisse
Es existiert eine Geschwindigkeit v < c, sodass die Ereignisse A und B im bewegten Bezugssystem
L̄ gleichzeitig stattfinden.
Dieser Fall hat unter Umständen Konsequenzen für die Kausalitätsbeziehung zwischen zwei Ereignissen!
14
KAPITEL 3. DER MINKOWSKI-RAUM
3.3 Minkowski-Diagramme
Zur Verbildlichung von Ereignissen im Raum und in der Zeit bedient man sich zwei- bzw. dreidimensionaler Diagramme, welche auch als Minkowski-Diagramme1 bezeichnet werden. Neben
der zeitlichen Dimension wird die räumliche Darstellung zur Vereinfachung auf eine bzw. zwei
Raumdimensionen beschränkt.
u<c
c·t
u=c
u=0
c∆t
α = 45◦
∆x
x
Trajektorie eines sich
mit u = c bewegenden
Teilchens
Trajektorie eines sich mit
Unterlichtgeschwindigkeit u < c
bewegenden Objektes
Trajektorie eines
ruhenden Objektes
mit u = dx
dt = 0
Abbildung 3.1: Zweidimensionales Minkowski-Diagramm mit einer räumlichen Koordinate x
und dem zeitlichen Abstand c∆t
Die Trajektorien im Minkowski-Diagramm bezeichnet man auch als Weltlinien. Ihr Anstieg α
bestimmt sich dabei gemäß
u=
∆x
c∆x
=
∆t
c∆t
→
bzw.
β =
1
β
=
u
∆x
=
= cot α
c
c∆t
c
= tan α
(für L̄ mit v = u)
u
Bereiche und Ereignisse im Minkowski-Diagramm werden wie folgt bezeichnet
c·t
lichtartige Ereignisse
(Lichtkegel mit u = c)
Zukunft
von A
raumartige
Ereignisse
A
Gegenwart von A
x
y
Vergangenheit
von A
zeitartige Ereignisse
Abbildung 3.2: Bezeichnung der Bereiche im dreidimensionalen Minkowski-Diagramm
1
Nach dem Mathematiker Hermann Minkowski, welcher den Begriff der vierdimensionalen Raumzeit prägte
KAPITEL 3. DER MINKOWSKI-RAUM
15
3.4 Kausalität
Das Intervall I ist unter Lorentz-Transformation invariant. Im räumlich eindimensionalen Fall
gilt I = x2 − (c∆t)2 = const. - dies ist die Darstellung zweier Hyperbeln in der Ebene (Abbildung 3.3). In zwei Raumdimensionen entspricht dies hingegen einem (ein- bzw. zweischaligen)
Hyperboloid im dreidimensionalen Minkowski-Raum.
c·t
c·t
x
(a) zeitartige Ereignisse: Ereignisse in der Vergangenheit von A liegen auch in anderen Bezugssystemen
in der Vergangenheit des Ereignisses A - dies bezeichnet man mit dem Begriff der Einsteinschen Kausalität
x
(b) raumartige Ereignisse: Ereignisse in der Vergangenheit von A im Bezugssystem L können in einem
anderen System L0 auch in der Zukunft von A liegen es ist im Allgemeinen nicht zu erwarten, dass raumartig verbundene Ereignisse in kausalem Zusammenhang
stehen
Abbildung 3.3: Darstellung zeitartig und raumartig verbundener Ereignisse im zweidimensionalen Minkowski-Diagramm
16
KAPITEL 3. DER MINKOWSKI-RAUM
KAPITEL 4. RELATIVISTISCHE MECHANIK
17
4 Relativistische Mechanik
4.1 Eigenzeit und Eigengeschwindigkeit
Die Eigenzeit τ ist eine unter Lorentz-Transformation invariante Größe. In ihr manifestiert sich
das Relativitätsprinzip, dass physikalische Effekte in allen Inertialsystemen gleich beobachtet
werden. Ein Beispiel hierfür sind Schwingungen innerhalb von Atomen oder Molekülen, die sich
für die Zeitmessung nutzen lassen (z.B. in Cäsium-Atomuhren).
Man betrachte die Bewegung eines Objektes wie z.B eines Flugzeuges, welches sich im System L
mit der Geschwindigkeit u entlang einer Weltlinie vom Ort A zum Ort B bewegt.
L0
L
c·t
c · t0
u
~v
x0
A
B
x
l
Abbildung 4.1: Zur Definition von gewöhnlicher Geschwindigkeit und Eigengeschwindigkeit
Die gewöhnliche Geschwindigkeit ist dabei definiert über
~u =
d~l
dt
(4.1)
wobei in Nenner und Zähler jeweils Lorentz-variante Größen
Länge und Zeit stehen. Das difq der
¡ u ¢2
ferentielle Zeitintervall dt transformiert sich gemäß dτ = 1 − c dt in das Eigenzeit-Intervall.
Mit diesem formuliert man nun die Eigengeschwindigkeit als
d~l
dτ
(4.2)
d~l dt
~u
·
=q
¡ ¢2
dt dτ
1 − uc
(4.3)
~η =
und kann somit schreiben
~η =
In Viererschreibweise erhält die Eigengeschwindigkeit die Form
ηµ =
h
i
dxµ
1
=q
c,
u
,
u
,
u
x y z
¡ ¢2
dτ
1 − uc
(4.4)
18
KAPITEL 4. RELATIVISTISCHE MECHANIK
Durch Bilden des Skalarproduktes
1
−c2
2
2
2
2
η ηµ =
¡ u ¢2 −c + ux + uy + uz =
¡ ¢2
|
{z
}
1− c
1 − uc
µ
µ
¶
u2
1 − 2 = −c2
c
=u2
wird deutlich, dass es sich bei der Eigengeschwindigkeit um einen Vierervektor handelt, da das
Intervall η µ ηµ einen konstanten Wert aufweist. Die Eigengeschwindigkeit hat somit ein günstigeres Transformationsverhalten als die gewöhnliche Geschwindigkeit. Transformiert man die
Eigengeschwindigkeit η in das Bezugssystem L0 , so erhält man
η̄ µ = Λµν η ν
(4.5)
bzw. ausgeschrieben
¡
¢
η̄ 0 = γ η 0 − βη 1
¡
¢
η̄ 1 = γ η 1 − βη 0
η̄ 2 = η 2
η̄ 3 = η 3
Als weitere wichtige Größen in der Mechanik werden im Folgenden der Impuls und die Energie
betrachtet
KAPITEL 4. RELATIVISTISCHE MECHANIK
19
4.2 Energie und Impuls
Klassisch ist der Impuls p~ definiert als
(4.6)
p~ = m~v
mit der Masse m und der Geschwindigkeit ~v . Bezieht man den Impuls im Sinne der speziellen
Relativitätstheorie nun ebenfalls auf die Eigengeschwindigkeit bzw. Eigenzeit τ , so folgt
m~u
p~ = m~η = q
¡ ¢2
1 − uc
(4.7)
oder in Viererschreibweise ausgedrückt
h
i
m
pµ = mη µ = q
c,
u
,
u
,
u
x
y
z
¡ ¢2
1 − uc
(4.8)
m
q
¡ ¢2 =: mrel
1 − uc
(4.9)
Der vordere Term
wurde dabei von Albert Einstein ursprünglich als relativistische Masse bezeichnet. Diese wäre
bei relativistischen Geschwindigkeiten u entsprechend größer als die Masse in Ruhe. Heutzutage arbeitet man anstatt mit relativistischen Massen mit der relativistischen Energie, die aus
Multiplikation der Nullten Komponente des Impulses pµ mit der Lichtgeschwindigkeit c folgt.
E = p0 · c = q
mc2
2
¡ u ¢2 = mrel c
1− c
→
p0 =
E
c
Zusammen formuliert man schließlich den Energie-Impuls-Vierervektor pµ
¶
µ
¡
¢
E
, mη 1 , mη 2 , mη 3
pµ = p0 , p1 , p2 , p3 =
c
(4.10)
(4.11)
Für den Fall u = 0 ergibt sich die Ruheenergie als
ERuhe = m · c2
(4.12)
Beispiel 4.1 (Ruheenergie)
Den Zahlenwert der Ruhenenergie für eine Masse von beispielsweise 1 kg berechnet man zu
¡
¢2
ERuhe = 1 kg · 3 · 108 m/s = 9 · 1016 kgm2 /s2 ≈ 1017 J ≈ 27 TWh
Zum Vergleich: der Primärenergiebedarf Deutschlands pro Jahr beträgt etwa 3900 TWh. Zur
Deckung dieses Bedarfs wäre also das Energieäquivalent einer Masse von 140 kg erforderlich.
Dies entspricht nur rund 0,38 kg pro Tag (mit anderen Worten: „Ein Weißbier pro Tag genügt“).
Die aus der Kinematik bekannte kinetische Energie kann nun geschrieben werden als
1
Ekin = E − ERuhe = E − mc2 = mc2 q
¡ v ¢2 − 1
1− c
(4.13)
Im Falle sehr kleiner, d.h. klassischer Geschwindigkeiten u ¿ c folgt hieraus durch eine TaylorEntwicklung
1
3 mu4
Ekin = mu2 +
+ ...
2
8 c2
Im ersten Glied erkennt man dabei die bisher bekannte Formel zur Berechnung der kinetischen
Energie.
20
KAPITEL 4. RELATIVISTISCHE MECHANIK
Bemerkung 4.1
Sowohl der relativistische Impuls als auch die relativistische Energie stellen Erhaltungsgrößen
dar. An dieser Stelle sei bemerkt, dass Erhaltungsgrößen nicht mit Invarianten zu verwechseln
sind. Erstere betrachtet man innerhalb eines Inertialsystems, während bei Letzteren der Wechsel
zwischen Inertialsystemen eine Rolle spielt.
Größe
Ruhemasse
Energie
Impuls
gewöhnl.Geschwindigkeit
elektr. Ladung
Erhaltungsgröße
X
X
X
Invariante
X
X
Tabelle 4.1: Gegenüberstellung von Erhaltungsgrößen und invarianten Größen
Wie man leicht zeigen kann, handelt es sich auch beim Energie-Impuls-Vierervektor um eine
Lorentz-Invariante:
η µ ηµ = −c2
pµ pµ = mη µ · mηµ = −m2 c2
→
Ausführlich geschrieben
µ
0 2
1 2
2 2
3 2
0 2
2
p pµ = −(p ) + (p ) + (p ) + (p ) = −(p ) + p
µ
= −
E
c
¶2
+ p2 = −m2 c2
E 2 − (pc)2 = m2 c4
→
Für masselose Teilchen mit m = 0 erhält man daraus die Beziehung
E = p·c
(4.14)
Gedankenexperiment 4.1 (Teilchenkollision)
Zwei Teilchen der Masse m bewegen sich mit der Geschwindigkeit v = 54 c aufeinander zu und
kollidieren schließlich inelastisch.
Zeitpunkt t1 :
m
m
4
5c
Zeitpunkt t2 :
4
5c
M
0c
Der Impulserhaltungssatz ist erfüllt, da der Impuls sowohl vor als auch nach dem Stoß Null ist.
Für die Energie gilt hingegen:
r
mc2
5 2
E1 = E(t1 ) = 2 · q
¡ 4 ¢2 = 2 3 mc
1− 5
E2 = E(t2 ) = M c2
q
Aus der Forderung der Energieerhaltung E1 = E2 folgt dementsprechend M = 2 53 m > 2m,
d.h. die Masse M nach der Kollision ist größer als die Summe der Massen zuvor. Wie das
Beispiel zeigt, sind Masse und Energie also gleichwertig zu betrachten - das eine kann in das
andere umgewandelt werden.
KAPITEL 4. RELATIVISTISCHE MECHANIK
21
In folgender Tabelle sind die Relationen von Energie und Impuls im klassischen und relativistischen Fall gegenübergestellt.
klassisch
relativistisch
Impuls
p~ = m~u
p~ = m~η =
Energie
E = 21 mu2
E=
u
q m~
2
1−( uc )
2
q mc
2
1−( uc )
Tabelle 4.2: Ausdrücke für Energie und Impuls im klassischen und relativistischen Fall
Welche Konsequenz ergibt sich nun für Impuls und Energie bei der Betrachtung masseloser
Teilchen (m = 0)?
• klassisch bedeutet dies E = 0 und p~ = 0
p
wegen F~ = m~a = d~
dt = 0 gibt es keine Kraft und folglich auch keine Gegenkraft
demzufolge existiert keinerlei Wechselwirkung mit bzw. zwischen masselosen Teilchen
• relativistisch ergeben sich für m = 0, aber mit Geschwindigkeiten nahe der Lichtgeschwindigkeit, für Energie und Impuls Ausdrücke der Form „ 00 “, welche bei der Grenzwertbildung
näher zu untersuchen sind
es gibt also mögliche Wechselwirkungen nur für den Fall, dass gleichzeitig u → c geht
es gilt dann auch die Beziehung E = pc
Man kann in der Realität mindestens ein derartiges Teilchen vorfinden, welches keine Masse
aufweist. Ein Beispiel ist das Austauschteilchen der elektromagnetischen Wechselwirkung, das
Photon.
Bemerkung 4.2 (Photoelektrischer Effekt)
Aus Experimenten zur Untersuchung des photoelektrischen Effektes ist bekannt, dass bei Bestrahlung einer Metallplatte mit monochromatischem Licht definierter Frequenz unterhalb einer
bestimmten Grenzfrequenz keine Herauslösung von Elektronen stattfindet - ganz gleich, wie hoch
die Intensität dieses Lichtes gewählt wird. Diese Beobachtung ist mit klassischen Theorien oder
der speziellen Relativitätstheorie nicht erklärbar
In der Quantenmechanik hingegen wird die Energie der einfallenden Lichtteilchen nicht als kontinuierlich, sondern diskret verteilt („gequantelt„) angenommen. Der Ausdruck für die von einem
Photon transportierte und auf ein Elektron übertragbare Energie ist hier frequenzabhängig mit
E = hf = ~ω
mit ~ =
h
2π
wobei h (~) das (reduzierte) Plancksche Wirkungsquantum darstellt. Damit lässt sich der
beobachtete Effekt erklären.
22
KAPITEL 4. RELATIVISTISCHE MECHANIK
Man betrachte im Folgenden einen Compton-Streuprozess, d.h. den Stoß zwischen einem Photon
und einem freien, in Ruhe befindlichen Elektron.
Beispiel 4.2 (Compton-Streuung)
Ein zu Beginn ruhendes Elektron e− der Ruhemasse me und mit der Ruheenergie mc2 wird
von einem einfallenden Photon der Energie E0 getroffen. Da es sich bei dem Elektron um
ein punktförmig idealisiertes Teilchen ohne räumliche Ausdehnung (d.h. ein nulldimensionales
Objekt) handelt, kann hierfür kein Auftreffwinkel angegeben und der Stoßvorgang somit nicht
wie in der klassischen Mechanik betrachtet werden. Für die Bewegung des gestreuten Photons
mit der Energie E = pp c und des Elektrons nach dem Stoß werden jedoch allgemein die Winkel
ϑ bzw. ϕ zur ursprünglichen Einfallsrichtung angesetzt.
vorher:
nachher:
E
E0
me
ϑ
ϕ
e−
e−
Aufgrund der Impulserhaltung gilt für die vertikale Impulskomponente
→
pe sin ϕ = pp sin ϑ
sin ϕ =
pp
E
sin ϑ
sin ϑ =
pe
pe c
sowie für die horizontale Komponente
E0
pp =
c
→
E
= pp cos ϑ + pe cos ϕ = cos ϑ + pe
c
s
1−
µ
E
sin ϑ
pe c
¶2
p2e c2 = (E0 −E cos ϑ)2 + E 2 sin2 ϑ = E02 − 2EE0 cos ϑ + E 2
Aus dem Energieerhaltungssatz folgt mit Ee2 − p2e c2 = m2 c4 zudem
q
p
Ee + Ep = E0 + mc2 = E + (mc2 )2 + (pe c)2 = E + m2 c4 + E02 − 2EE0 cos ϑ + E 2
Somit erhält man als Ausdruck für die Energie und die Wellenlänge des gestreuten Photons
E=
E=hf =h λc
1
1−cos ϑ
mc2
+
1
E0
=⇒
λ = λ0 +
h
(1 − cos ϑ)
mc
|{z}
=:λC
h
Der Term λC = mc
wird dabei als sogenannte Compton-Wellenlänge bezeichnet. Diese Größe
ist z.B. bei Doppelspaltexperimenten mit Elektronen von Bedeutung, deren Ergebnisse sich mit
der Welleneigenschaft der Elektronen erklären lassen.
Bemerkung 4.3
Während sich aus dieser relativistischen Betrachtung die Energie und Wellenlänge des am Elektron gestreuten Photons bestimmen lässt, ist keinerlei Aussage über die Winkelverteilung respektive die Wahrscheinlichkeit des Auftretens eines bestimmten Streuwinkels der Photonen
möglich. Dies folgt nur aus wahrscheinlichkeitstheoretischen Überlegungen mithilfe der Quantenmechanik (siehe Klein-Nishina-Gleichung).
KAPITEL 4. RELATIVISTISCHE MECHANIK
23
4.3 Grenzgeschwindigkeit
Klassisch ist die Kraft F~ als Zeitableitung des auf die gewöhnliche Geschwindigkeit bezogenen
Impulses über
d~
p
F~ = m~a =
dt
definiert. In der relativistischen Betrachtung wird der Impuls hingegen in der Formulierung über
die Eigengeschwindigkeit gemäß Gleichung (4.7) verwendet, d.h. es ist
d~
p
F~ =
dt
mit p~ = m~η = m q
~u
1−
¡ u ¢2
c
Hiermit lässt sich im nachfolgenden Beispiel einer beschleunigten Punktmasse zeigen, dass im
Gegensatz zum klassischen Fall eine Grenzgeschwindigkeit für die Bewegung existiert.
Beispiel 4.3 (Beschleunigte Punktmasse)
Man betrachte eine Punktmasse m, die zum Zeitpunkt t = 0 in Ruhe sei und auf die eine konstante Kraft F einwirke. Für den zeitlichen Verlauf des Impulses erhält man durch Integration
d~
p
F~ =
dt
´
dt
!
mit C = p(0) = 0
→
p(t) = F t + C
⇒
p(t) = F t = r
mu(t)
³
´2
1 − u(t)
c
Hieraus folgt durch Umstellen
u(t) = q
F
mt
1−
¡ F t ¢2
mc
F
t. Für den GrenzNach klassischer Rechnung erhielte man die Geschwindigkeitsrelation u(t) = m
fall t → ∞ folgt somit lim u(t) = c, d.h. die Lichtgeschwindigkeit ist die höchstmögliche Get→∞
schwindigkeit. Dieses Resultat würde sich ebenso ergeben, wenn man eine beliebige zeitliche
Kraftwirkung ansetzt.
Für den Ort der Punktmasse erhält man durch weitere zeitliche Integration
s
µ
¶2
ˆt
ˆt
2
0
0
mc
F
t dt
F ct
q
x(t) = u(t0 )dt0 =
1+
− 1
¡ F t0 ¢2 = F
m
mc2
1 − mc
0
0
Dies ist die Darstellung einer Hyperbel, welche sich im Minkowski-Diagramm für t → ∞
asymptotisch an die Gerade x = ct annähert.
24
KAPITEL 4. RELATIVISTISCHE MECHANIK
4.4 Vierervektor der Kraft
Für die mechanische Arbeit gilt
ˆ
W =
dE
dt
dt
mit der relativistischen Energie
mc2
E=q
¡ ¢2
1 − uc
dE
=³
dt
→
d~u
m~u
d~
p
=
~u = F~ ~u
3
´
¡ u ¢2 2 dt
dt
1− c
Bei obiger Definition der Kraft über die Zeitableitung des Impulses nach der gewöhnlichen Zeit
t wird deutlich, dass diese kein günstiges Verhalten unter Lorentz-Transformation aufweisen
wird. Man betrachtet zunächst
d~
p
F~ =
dt
mit
~v = v~ex
Für die Kraftkomponenten gilt
dp̄
mit
dE
dt
F̄y =
y
dp̄y
dp̄y
dt
³
´
=
=
dt̄
γdt − γ βc dx
γ 1 − βc dx
dt
F̄z =
dp̄z
= ...
dt̄
F̄x =
dp̄x
= ...
dt̄
=
Fy
¢
γ 1 − β ucx
¡
F
¡ z
¢
γ 1 − β ucx
¡ ¢
Fx − βc dE
dt
=
1 − β ucx
=
= F~ ~u. Für ~u = 0 folgt also
F̄⊥ =
1
F⊥
γ
F̄k = Fk
Demgegenüber die alternative Definition der Kraft über die Zeitableitung nach der Eigenzeit τ
p
~ = d~
K
dτ
→
Kµ =
dpµ
dτ
,
K0 =
dp0
1 dE
=
dτ
c dτ
(4.15)
welche einen Vierervektor darstellt und auch als Minkowski-Kraft bezeichnet wird. Der Term dE
dτ
innerhalb der nullten Komponente des Kraftvierervektors nennt man häufig auch Eigenleistung.
Den Zusammenhang zur gewöhnlichen Kraft erhält man wie folgt
p dt
1
~ = d~
K
= q ¡ ¢ F~
2
dt dτ
1− uc
KAPITEL 4. RELATIVISTISCHE MECHANIK
25
4.5 Impulsbetrachtung
Beispiel 4.4 (Statischer Stromfluss im Koaxialkabel)
Man betrachte folgende einfache elektrische Anordnung eines Koaxialkabels, in dem ein statischer Stromfluss stattfindet.
~
S
Querschnitt
~¯
S
~
E
I
U
R
~
H
Spannungsquelle
Koaxialkabel
Lastwiderstand
Abbildung 4.2: Anordnung eines von einem Gleichstrom durchflossenen Koaxialkabels zur
Erläuterung des verborgenen Impulses
~=E
~ ×H
~ definiert den Energiefluss innerhalb der Anordnung. Er ist
Der Poynting-Vektor S
von der Spannungsquelle zum Lastwiderstand gerichtet. Gleichzeitig existiert ein elektromagnetischer Impuls (aus dem Maxwellschen Spannungstensor) gemäß
˚
~
pem = µ0 ε0
SdV
V
Es stellt sich daher die Frage, warum sich das Koaxialkabel aufgrund dieses Impulses nicht
bewegt. Ist dieser möglicherweise nur verschwindend gering oder gibt es eventuell einen kompensierenden Effekt, der dazu führt, dass die Anordnung in Ruhe verbleibt? Wie sich anhand
von Experimenten herausstellt, ist Letzteres zutreffend. Betrachtet man die Energieübertragung
zum Lastwiderstand und Umwandlung in Wärme nämlich relativistisch, so kommt dies wegen
E = mc2 einem Massetransport und somit einem Impulsübertrag gleich. Man spricht hierbei
auch von einem verborgenen Impuls.
26
KAPITEL 4. RELATIVISTISCHE MECHANIK
Beispiel 4.5 (Magnetischer Dipol)
Man betrachte nun eine geschlossene Leiterschleife als Modell eines magnetischen Dipols der
~ befindet.
Höhe w und Länge l, der sich in einem statischen elektrischen Feld E
I
u+
~ ⊗
H
w
~
E
u−
Beschleunigung der
Ladungsträger
Abbremsung der
Ladungsträger
l
Abbildung 4.3: Vom Strom I durchflossene Leiterschleife (magnetischer Dipol) im äußeren
elektrostatischen Feld
Für die Stromstärke im Leiter gilt
I=
QN+ u+
QN− u−
=
l
l
→
N± u± =
Il
Q
Klassisch gesehen ist der Impuls der Anordnung Null, da
p = mN+ u+ − mN− u− = 0
ist. Für den elektromagnetischen Impuls hingegen gilt
˚
~ × HdV
~
pem = µ0 ε0
E
6= 0
V
Der Gesamtimpuls als Summe aus mechanischem und elektromagnetischem Impuls wäre demzufolge ungleich Null, was sich jedoch experimentell nicht bestätigen lässt. Behandelt man das
Problem relativistisch, so erhält man als Ergebnis
p = γ+ mN+ u+ − γ− mN− u− = m
Il
(γ+ − γ− ) 6= 0
Q
Der Energiezuwachs im linken Teil der Leiterschleife ist mit Eu = γ− mc2 (unten) und Eo =
~
γ+ mc2 (oben) ∆E = (γ+ − γ− )mc2 . Zusammen mit der Energiedifferenz ∆E = Q|E|w
der
~
entlang der Strecke w durch das Feld E beschleunigten Ladungsträger (Ladung Q) ergibt sich
durch Gleichsetzen und Umstellen
γ+ − γ− =
~
Q|E|w
mc2
Der Impuls berechnet sich dementsprechend zu
p=
~
Il|E|w
c2
⇒
p~ =
´
1 ³
~
m
~
×
E
c2
wobei m
~ mit |m|
~ = Ilw das magnetische Moment des Dipols darstellt. Der Impuls wird also
wegen p~ = −~
pem genau kompensiert.
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
27
5 Relativistische Elektrodynamik
Man betrachte einen Strom aus positiven und negativen Ladungsträgern innerhalb eines neutralen Drahtes. Mit der Linienladungsdichte λ ausgedrückt, beträgt die Stromstärke im Draht
I = 2λ|~v |. Im Abstand % von der Leiterachse befinde sich eine Probeladung q, welche mit der
Geschwindigkeit u < v parallel zum Draht in Flussrichtung der positiven Ladungen bewegt wird
(Abbildung 5.1).
−λ
~v− = −~v
I
~v+ = ~v
+λ
%
q
~u < ~v
Abbildung 5.1: Stromfluss aus positiven und negativen Ladungsträgern in einem neutralen
Draht
Mithilfe der ersten Maxwell-Gleichung
‹
~ = %V
div D
˚
~ A
~=
Dd
→
%v dV = Q = 0
V
∂V
berechnet sich die Gesamtladung Q im Gebiet des Drahtes, die wegen der Neutralität jedoch Null
~
~
ist. Somit gilt für die wirkenden Felder D(%)
= 0 bzw. E(%)
= 0. Es wird also keine elektrische
Kraft auf die Probeladung im Laborsystem L ausgeübt. Im Ruhesystem L̄ der mit ~u bewegten
Ladung gilt jedoch
v±u
v± =
mit
v− > v+
1 ∓ uv
c2
Gleichzeitig ändert sich die Linienladungsdichte λ, da wegen der Lorentz-Kontraktion die Abstände der Bewegung der Ladungsträger im Draht andere sind. Mit λ− > λ+ hat der Draht aus
Sicht der Probeladung eine negative Nettoladung! Bezieht man weiterhin die Linienladungsdichte
auf die Ladungsdichte λ0 im Ruhesystem der positiven Ladungen (d.h. nicht in L oder L̄!)
1
λ± = ±λ0 q ¡ ¢ = ±λ0 γ±
2
1− vc±
so schreibt sich nun
λ = γ · λ0
mit
1
γ=q ¡ ¢
2
1− vc
Für die positiven bzw. negativen Ladungsträger gilt
1 ∓ uv2
γ± = γ q ¡c ¢
2
1− uc
28
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
Die Nettoladung im System L̄ beträgt folglich
2λuv
λtot = λ+ + λ− = λ0 (γ+ + γ− ) = − q ¡ ¢
2
c2 1− uc
Das elektrische Feld Ē und die hierdurch wirkende Kraft F̄ auf die Probeladung q bestimmen
sich also zu
λtot
qu
λv
q ¡ ¢
Ē =
→
F̄ = q Ē = −
2
2πε0 %
πε0 c2 %
1− uc
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
29
5.1 Transformation der Felder
Beim Vergleich zwischen einem ruhenden und einem bewegten Beobachter wird deutlich, dass die
Messung eines elektrischen oder magnetischen Feldes von der Wahl des Bezugssystems abhängig
ist. Wie genau sieht nun dieser Zusammenhang aus, d.h. wie werden die Felder bei Wechsel
zwischen Inertialsystemen transformiert? Diese Frage soll anhand einiger Gedankenexperimente
mit simplen elektrischen und magnetischen Anordnungen beantwortet werden. Hierfür werden
zusätzlich die folgenden zwei Postulate aufgestellt
• die elektrische Ladung ist eine bei Lorentz-Transformation invariante Größe und bleibt
innerhalb eines Bezugssystems erhalten
• die elektromagnetische Feldtheorie ist eine Feld-Theorie, d.h. die Information steckt allein
~
im Feld und es ist irrelevant, wie dieses Feld erzeugt wurde (ob z.B. ein elektrisches Feld E
~
~ = %V eine statische Ladungsverteilung %V oder über rot E
~ = − ∂ B die zeitliche
über div E
ε
∂t
~ zur Ursache hat). Die Transformation ist stets die gleiche!
Änderung eines Magnetfeldes B
Gedankenexperiment 5.1 (Transformation des elektrischen Feldes)
Man betrachte nun einen Plattenkondensator, der im System L0 die Plattenfläche A0 = l0 · w0 ,
Flächenladungsdichte σ0 = AQ0 und den Plattenabstand d0 besitzt und dessen Platten parallel
zur xz-Ebene orientiert sind (Abbildung 5.2).
L0
L
y0
y
~v0
−σ0
z0
+σ0
d0
x0
w0
x
z
l0
Abbildung 5.2: Gedankenexperiment zur Transformation des elektrischen Feldes eines Plattenkondensators
In L0 gilt für das elektrische Feld im Plattenkondensator
~ 0 = σ0 ~ey0
E
ε0
Die Längsabmessung l0 der Platten stellt aus Sicht des sich mit der Geschwindigkeit ~v0 = v0~ex
bewegenden Systems L einen bewegten Maßstab dar, welcher sich aufgrund der LorentzKontraktion gemäß
r
³ v ´2
1
0
l0
l = l0 = 1 −
γ0
c
verkürzt, während die Querabmessungen w = w0 und d = d0 gleich bleiben. Damit wird in L
eine kleinere Plattenfläche A = l · w0 bei gleicher Ladungsmenge Q beobachtet, weshalb also die
Flächenladungsdichte mit
σ=
Q
Q
= γ0
= γ0 σ0 = q
A
l0 w0
σ0
¡ ¢2
1 − vc0
zunimmt. Für die Stärke des elektrischen Feldes heißt dies entsprechend
~ = σ ~ey = γ0 E
~0
E
bzw. allgemein
E ⊥ = γ0 E0⊥
ε0
30
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
Letztere Verallgemeinerung folgt dabei aus der Überlegung, dass die Situation für eine beliebige
Drehung der Anordnung um die x-Achse identisch ist und die gefundenen Beziehungen somit
für jede Feldkomponente E ⊥ senkrecht zur Bewegungsrichtung gültig sind. Auf gleichem Weg
lässt sich auch eine Aussage für das Feld in Bewegungsrichtung ableiten. Da in diesem Fall die
Plattenfläche gleich bleibt und sich stattdessen der Plattenabstand verkürzt, ist hier wegen
~0
~ = Q ~ex = Q ~ex = E
E
ε0 A
ε0 A 0
k
E k = E0
bzw.
keine Änderung der Feldstärke feststellbar.
Gedankenexperiment 5.2 (Elektrisches Feld einer gleichförmig bewegten Ladung)
Man betrachte nun eine Punktladung q, welche sich im Ursprung des Systems L0 befinde und
deren elektrisches Feld am Ort ~r0 gemessen wird. Innerhalb eines gegenüber L0 gleichförmig mit
~ = ~r + ~v0 t beobachtet
~v0 = v0~ex bewegten Bezugssystems L werde gleichfalls das Feld am Ort R
(Abbildung 5.3).
L0
L
y0
y
~v0
~r0
~
R
ϑ
x0
q
z0
x
z
Abbildung 5.3: Transformation des radialen elektrischen Feldes einer bewegten Punktladung
Für das Feld in L0 gilt
~0 =
E
q ~r0
4πε0 |~r0 |3
bzw. ausführlich geschrieben mit ~r0 = (x0 , y0 , z0 )T
E0x =
q
x0
¡
4πε0 x2 + y 2 + z 2 ¢ 23
0
0
E0y = . . .
E0z = . . .
0
Aufgrund der Lorentz-Kontraktion der Maßstäbe und mit den aus dem vorigen Gedankenexperiment erhaltenen Feldtransformationen folgt in L mit
x0 = γ0 (x + v0 t) = γ0 Rx
y0 = y = Ry
z0 = z = Rz
Ex = Ex0
Ey = γ0 Ey0
Ez = γ0 Ez0
für die einzelnen Feldkomponenten des elektrischen Feldes
q
γ0 Rx
q
γ0 Rx
3 =
£
¤
¡
4πε0 (γ R )2 +R2 +R2 2
4πε0 γ 2 R2 cos2 ϑ+R2 sin2 ϑ¢ 23
0 x
y
z
0
= ...
Ex =
E0y
E0z = . . .
und damit insgesamt der Ausdruck
~
γ0 R
q
~ = q
E
3 =
¡
¢
4πε0 γ 2 R2 cos2 ϑ+R2 sin2 ϑ 2
4πε0 ³
0
¡ ¢2
~
1− vc0
R
3
´
¡ ¢2
~ 3
2 |R|
1− vc0 sin2 ϑ
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
31
Gedankenexperiment 5.3 (Transformation elektrischer und magnetischer Felder)
Man betrachte wieder das Beispiel des Plattenkondensators, wobei nun zusätzlich das Magnetfeld der Anordnung infolge der bewegten Plattenladung berücksichtigt werden soll (Abbildung
5.4).
L
L̄
y
ȳ
~v relativ zu L
~v0
−σ
~
B
+σ
~v0
z
d
x
w
x̄
z̄
l
~v¯ relativ zu L0
Abbildung 5.4: Gedankenexperiment zur Transformation des elektrischen Feldes eines Plattenkondensators
Das elektrische Feld im Kondensator bestimmt sich wie zuvor auch. Für die Stromdichte ermittelt man aus der Ladungsdichte und der Relativgeschwindigkeit v0
J~± = ∓σv0~ex
Aus dem Durchflutungsgesetz der Maxwell-Gleichungen lässt sich dann durch Integration
~ = Bz ~ez (mit Bz < 0) zu
mithilfe des Stokesschen Integralsatzes die magnetische Induktion B
˛
ˆ
¨
~ r = Bz dz = −wBz = µ0
~ A
~ = µ0 wJ
Bd~
Jd
⇒
Bz = −µ0 σv0
A
∂A
berechnen. Im System L̄, welches sich mit der Geschwindigkeit v relativ zu L und der Geschwindigkeit v̄ relativ zu L0 bewegt, gilt für die Relativgeschwindigkeit v̄ mit β = vc bzw. β0 = vc0
und für die beiden Faktoren β̄ und γ̄
v̄ =
β̄ =
γ̄ =
v + v0
v + v0
vv0 =
1 + c2
1 + ββ0
v̄
β + β0
(1 ± β0 )(1 ± β)
=
,
1 ± β̄ = . . . =
c
1 + ββ0
1 + ββ0
1
1
q
¡ ¢2 = p1 + β̄ 2
1 + v̄c
Die Ausdrücke für die Felder lauten damit
Ēy
B̄z
¶
γ̄
σ
=
=
γ 0 ε0
µ ¶
γ̄
= −µ0 σ̄v̄ = −µ0 σ
v̄
γ0
σ̄
γ̄σ0
=
ε0
ε0
σ=γ0 σ0
µ
Für das hierin enthaltene Verhältnis der Lorentz-Faktoren schreibt man weiterhin
s
s
γ̄
1 − β02
(1 + β0 )(1 − β0 )
1 + ββ0
=
=
=p
2
γ0
1 − β̄
(1 + β̄)(1 − β̄)
(1 + β)(1 − β)
³
´
1 + ββ0
vv0
= p
=γ 1+ 2
c
1 − β2
32
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
sodass mit der Beziehung c2 =
Ēy
B̄z
1
µ0 ε0
letztlich als Ergebnis folgt
µ
¶
vv0 ´ σ
vv0 σ
= γ 1+ 2
= γ Ey +
= γ (Ey − vBz )
c
ε0
ε0 c2
µ
¶
³
³
´
vv0 ´ v + v0
σv
v
= −µ0 σγ 1 + 2
=
γ
−
=
γ
B
−
−
µ
σv
E
z
0
0
y
0
c
1 + vv
ε0 c2
c2
c2
³
(5.1)
(5.2)
Auf analoge Weise erhält man für die orthogonal um die x-Achse gedrehte Anordnung (Ersetzen
von Ey durch Ez und von Bz durch −By ) die Relationen
³
v ´
Ēz = γ (Ez + vBy )
B̄y = γ By + 2 Ez
(5.3)
c
Gedankenexperiment 5.4 (Transformation des Magnetfeldes einer Zylinderspule)
Als Nächstes muss nun noch untersucht werden, wie sich parallel zur Bewegungsrichtung orientierte Magnetfelder bei einer Transformation verhalten. Dafür wird die in Abbildung (5.5)
dargestellte, vom Gleichstrom I durchflossene und entlang der x-Achse verlaufende Zylinderspule der Länge l und Windungszahl N betrachtet.
L
L̄
y
ȳ
~v
~
B
x
z
x̄
z̄
Abbildung 5.5: Transformation des magnetischen Längsfeldes einer Zylinderspule
~ = Bx~ex der BewegungsAufgrund der Orientierung der Spule entspricht die Feldrichtung B
richtung ~v = v~ex des Bezugssystems L̄. Für die Flussdichte des magnetischen Feldes gilt im
Ruhesystem L
N
Bx = µ0 I
l
Wegen der Lorentz-Kontraktion erscheint die Spulenlänge l aus Sicht des bewegten Systems
verkürzt. Gleichzeitig wirkt sich die Zeitdilatation auf die Stärke des Stromes I aus, da diese
als Ladungsmenge pro Zeitintervall definiert ist. Da die Ladung eine invariante Größe darstellt,
heißt dies konkret
∆Q
1
∆Q̄
I¯ =
=
= I
∆t̄
γ∆t
γ
Die Flussdichte B̄x im bewegten System bestimmt sich somit zu
N
NI
N
B̄x = µ0 ¯ I¯ = µ0 1
= µ0 I = B x
γ
l
l
γl
bleibt also ähnlich der Längskomponente des elektrischen Feldes unverändert.
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
33
Einige Spezialfälle der Feldtransformation:
~ = 0 im System L folgt
• für den Fall B
~¯ = γ v (Ez ~ey − Ey ~ez ) = v (Ēz ~ey − Ēy ~ez ) = − 1 ~v × E
~
B
c2
c2
c2
~ = 0 im System L gilt hingegen
• mit E
~¯ = ~v × B
~¯
E
Gedankenexperiment 5.5 (Magnetfeld einer bewegten Punktladung)
Zuletzt werde das magnetische Feld einer mit der Geschwindigkeit ~v0 = v~ex bewegten Punktladung q (Abbildung 5.6) betrachtet.
L0 (Ruhesystem
der Ladung)
y0
L (bewegtes
Bezugssystem)
y
−~v
q
x0
x
Abbildung 5.6: Transformation des magnetischen Feldes eines bewegten Punktladung
~ 0 = 0. Im Bezugssystem L gilt dann mit ~v = −~v0
Im Ruhesystem L0 der Ladung ist B
~ = − 1 (−~v × E)
~ = 1 (~v × E)
~
B
2
c
c2
~ aus dem analogen Gedankenexperiment weiter
Mit dem Ausdruck für das elektrische Feld E
oben erhält man
³ ¡ ¢ ´
2
qv
1− vc
sin ϑ ~e
µ0
ϕ
~
B=
~ 2
4π ³ ¡ v ¢2 2 ´ 32 |R|
1− c sin ϑ
woraus sich für geringe Geschwindigkeiten der klassische Fall
~
~ = µ0 qv sin ϑ~eϕ = µ0 q ~v × R
B
2
3
4π
R
4π R
ableitet.
34
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
5.2 Der Feldstärketensor
Für Vierervektoren aµ galt bei Lorentz-Transformation zwischen zwei Bezugssystemen mit der
Relativgeschwindigkeit ~v¯ = v~ex das folgende Transformationsverhalten
γ
−γβ 0 0
−γβ
γ
0 0
āµ = Λµν aν
mit
Λ=
0
0
1 0
0
0
0 1
Die Transformation eines Tensors 2. Stufe gestaltet sich ganz analog dazu gemäß
t̄µν = Λµλ Λνσ tλσ
Ein solcher Tensor hätte ganz allgemein 16 unabhängige Komponenten in der Gestalt
00 01 02 03
t
t
t
t
10
11
12
t
t
t
t13
tµν =
20
21
22
t
t
t
t23
t30 t31 t32 t33
Mit den jeweils drei Feldstärkekomponenten des elektrischen und magnetischen Feldes ließen sich
jedoch nur sechs dieser 16 Komponenten belegen und es verblieben zehn weitere Freiheitsgrade.
Welche Eigenschaften müsste der Tensor tµν also aufweisen, damit es genau sechs unabhängige
Elemente gibt?
Wäre der Tensor symmetrisch, ergäben sich insgesamt zehn (vier Diagonalelemente sowie sechs
Elemente oberhalb bzw. unterhalb der Diagonale) als unabhängig. Im Falle eines antisymmetrischen Tensors hingegen erhielte man genau sechs unabhängige Komponenten, da jene auf der
Diagonale Null wären. Geht man nun also von einem antisymmetrischen Tensor der Form
0
t01
t02 t03
−t01
0
t12 t13
tµν =
−t02 −t12
0
t23
−t03 −t13 −t23 0
aus, so vollzieht sich die Transformation der einzelnen Komponenten wie folgt
t̄00 = Λ0λ Λ0σ tλσ = Λ00 Λ01 t01 + Λ01 Λ00 t10 = −γ 2 β(t01 − t01 ) = 0
¡
¢
¡
¢
t̄01 = Λ0λ Λ1σ tλσ = Λ00 Λ11 t01 + Λ01 Λ10 t10 = Λ00 Λ11 − Λ01 Λ10 t01 = γ 2 1 − β 2 t01 = t01
Wegen t̄01 = t01 könnte beispielsweise t01 = Ex oder t01 = Bx festgelegt werden. Für die
restlichen Komponenten erhält man
t̄11 = t̄22 = t̄33 = 0
t̄02 = Λ00 Λ22 t02 + Λ01 Λ22 t12 = γ(t02 − βt12 )
t̄03 = Λ00 Λ33 t03 + Λ01 Λ33 t13 = γ(t03 − βt13 )
t̄10 = Λ10 Λ01 t01 + Λ11 Λ00 t10 = γ 2 (β 2 − 1)t01 = −t̄01
t̄12 = Λ10 Λ22 t02 + Λ11 Λ22 t12 = −γ(βt02 − t12 )
t̄13 = Λ10 Λ33 t03 + Λ11 Λ33 t13 = −γ(βt03 − t13 )
t̄23 = Λ22 Λ33 t23 = t23
Man kann den Feldtensor demnach wie folgt konstruieren
Ey
Ez
Ex
0
c
c
c
Ex
0
Bz −By
−
Fµν = Ecy
− c −Bz
0
Bx
− Ecz By −Bx
0
(5.4)
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
35
Den hierzu dualen Feldtensor Gµν erhält man, indem Ec mit B und B mit − Ec vertauscht wird.
0
Bx
By
Bz
Ey
0
− Ecz
−Bx
c
(5.5)
Gµν =
Ez
Ex
−B
0
−
y
c
c
E
Ex
−Bz − cy
0
c
Die kovarianten Tensoren Fµν und Gµν ergeben sich schließlich durch Umdrehen des Vorzeichens
in der 0. Spalte und 0. Zeile.
5.3 Kontinuitätsgleichung in Viererschreibweise
Eine wichtige Relation der Elektrodynamik stellt die Kontinuitätsgleichung dar, mit der das
Prinzip der Ladungserhaltung formuliert wird. Es wurde zuvor bereits das Postulat aufgestellt,
dass die Ladung Q eine Lorentz-Invariante sowie eine Erhaltungsgröße darstellt. Wie aber
lässt sich die Kontinuitätsgleichung nun konkret im relativistischen Formalismus ausdrücken?
Zur Beantwortung dieser Frage wird das folgende Gedankenexperiment durchgeführt.
Gedankenexperiment 5.6 (Herleitung der relativistischen Kontinuitätsgleichung)
Man betrachte ein infinitesimal kleines Volumenelement V , welches die Ladungsmenge Q beinhalte und sich mit der Geschwindigkeit ~u = u~ex bewege (Abbildung 5.7).
L
L0
V
V0
~u
Q
Q
Abbildung 5.7: Bewegtes Volumenelement V mit der Ladungsmenge Q
Im System L schreibt sich die Raumladungsdichte als %V = VQ und die Stromdichte in der Form
J~ = %V ~u. Für das Ruhesystem der Ladung gilt hingegen
r
r
³ u ´2
³ u ´2
Q
Q
%V0 =
=
1−
= %V 1 −
und
J~0 = 0
V0
V
c
c
Die Stromdichte in L lässt sich somit über die Eigengeschwindigkeit ~η gemäß
~u
J~ = %V0 q
¡ u ¢2 = %V0 ~η
1− c
(5.6)
ausdrücken. In Viererschreibweise formuliert sich dies als
J µ = %V0 η µ = (c%V , Jx , Jy , Jz )
(5.7)
und die Kontinuitätsgleichung erhält damit schließlich die Form
∂%V
div J~ +
∂t
⇒
∂J µ
∂xµ
=
3
X
∂J i
i=1
= 0
∂xi
3
+
1 ∂J 0 X ∂J i
=
=0
c ∂t
∂xi
i=0
(5.8)
36
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
5.4 Maxwellsche Gleichungen in Viererschreibweise
Mit den zuvor eingeführten Feldtensoren Fµν und Gµν lassen sich die Maxwell-Gleichungen
in einer sehr kompakten Form zusammenfassen. Die inhomogenen Gleichungen erhält man aus
der Viererableitung von Fµν , während die beiden homogenen Gleichungen aus der Ableitung von
Gµν folgen. Es gilt
∂Fµν
∂Gµν
µ
=
µ
J
und
=0
(5.9)
0
∂xν
∂xν
Ausführlich ergibt sich z.B. für µ = 0 das Gaußsche Gesetz der Elektrostatik
µ
¶
∂F 0ν
∂F 00 ∂F 01 ∂F 02 ∂F 03
1 ∂Ex ∂Ey ∂Ez
=
+ 1 +
+
=
= µ0 J 0
+
+
0
2
3
∂xν
∂x
∂x
∂x
∂x
c
∂x
∂y
∂z
| {z }
|
{z
}
=0
~
=div E
~ = µ0 c2 %V = %V
div E
ε0
bzw. das Gaußsche Gesetz der Magnetostatik
∂G00 ∂G01 ∂G02 ∂G03
∂Bx ∂By ∂Bz
∂G0ν
~ =0
=
+
+
+
=
+
+
= div B
∂xν
∂x0
∂x1
∂x2
∂x3
∂x
∂y
∂z
Gleichsam folgt aus den übrigen Komponenten mit µ = 1, 2, 3 das Durchflutungsgesetz
µ
¶
´
∂
Ex
∂(0) ∂Bz ∂(−By )
1 ∂Ex ³
∂F 1ν
~ ~ex = µ0 J~
~ex
=
−
+
+
+
=
−
+
rot
B
∂xν
∂(ct)
c
∂x
∂y
∂z
c2 ∂t
..
.
~
~
~ = µ0 J~ + 1 ∂ E
~ = J~ + ∂ D
rot B
⇒
rot H
2
c ∂t
∂t
sowie das Faradaysche Induktionsgesetz
µ
¶
·
´ ¸
∂G1ν
∂(−Bx ) 1 ∂Ez ∂Ey
1 ∂Bx ³
~
=
−
−
=−
+ rot E ~ex = 0
∂xν
∂(ct)
c ∂y
∂z
c ∂t
..
.
~
~ = − ∂B
rot E
∂t
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
37
5.5 Viererpotentiale und Lorenz-Eichung
~ und elektrisches Skalarpotential Φ sind durch
Magnetisches Vektorpotential A
~
~ = − grad Φ − ∂ A
E
∂t
und
~ = rot A
~
B
(5.10)
definiert. Die homogenen Maxwell-Gleichungen werden mit diesen Definitionen automatisch
erfüllt. Die Potentiale sind hierüber jedoch nicht eindeutig bestimmt; es besteht Eichfreiheit,
denn mit einer beliebigen Funktion Ψ gelten die Eichtransformationen
~0 = A
~ + grad Ψ
A
→
~
~ 0 = rot A
~ 0 = rot A
~ + rot grad Ψ = B
B
| {z }
→
~0
~ 0 = − grad Φ0 − ∂ A = . . . = E
~
E
∂t
=0
Φ0 = Φ −
∂Ψ
∂t
Eine häufig verwendete Eichung ist die Lorenz-Eichung
~+
div A
1 ∂Φ
=0
c2 ∂t
(5.11)
Führt man nun das Viererpotential Aµ durch
¶
µ
Φ
µ
, Ax , Ay , Az
A =
c
(5.12)
ein, formuliert sich die Lorenz-Eichung in Viererschreibweise gemäß
3
X
∂Aµ
µ=1
∂xµ
3
+
∂ Φ X ∂Aµ
=
=0
∂(ct) c
∂xµ
⇒
µ=0
∂Aµ
=0
∂xµ
(5.13)
Das Viererpotential lässt sich über die Beziehung
Fµν =
∂Aν
∂Aµ
−
∂xµ
∂xν
(5.14)
mit dem Feldtensor verknüpfen. Beispielsweise folgt mit µ = 0 und ν = 1
F 01 =
=
∂ Φ
∂A1 ∂A0
∂Ax
−
=
−
∂x0
∂x1
∂(−ct) ∂x c
Ã
!
µ
¶
~
1
∂Ax ∂Φ
1
∂A
Ex
−
−
=
−
− grad Φ ~ex =
c
∂t
∂x
c
∂t
c
|
{z
}
~
=E
Aus den inhomogenen Maxwell-Gleichungen lässt sich mit dieser Relation die inhomogene
Wellengleichung des Viererpotentials aufstellen. Es ist
µ ν
¶
∂
∂A
∂Aµ
∂ ∂Aν
∂ ∂Aµ
∂Fµν
=
−
=
−
= µ0 J µ
∂xν
∂xν ∂xµ
∂xν
∂xµ ∂xν
∂xν ∂xν
Mit der Lorenz-Eichung (5.13) entfällt der erste Summand, sodass schließlich folgt
∂ ∂Aµ
= 2Aµ = −µ0 J µ
∂xν ∂xν
Darin ist
∂ ∂
2=
=
∂xν ∂xν
µ
∂2
∂2
∂2
+
+
∂x2 ∂y 2 ∂z 2
der D’Alembert-Operator in Viererschreibweise
¶
−
1 ∂2
1 ∂2
=
4
−
c2 ∂t2
c2 ∂t2
(5.15)
(5.16)
38
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
5.6 Minkowskikraft
Mithilfe des Feldtensors lässt sich der Vierervektor der Kraft bzw. die Minkowski-Kraft in der
Form
K µ = qην F µν
(5.17)
notieren. Für die Nullte Komponente µ = 0 erhält man
¡
¢
K 0 = qην F 0ν = q −η0 F 00 + η1 F 01 + η2 F 02 + η3 F 03
u
E
u
u
E
E
y
y
x
z
x
z
= q q
¡ u ¢2 c + q
¡ u ¢2 c + q
¡ u ¢2 c
1− c
1− c
1− c
=
~
1
q
~ q~u=J
~~
q
¡ u ¢2 ~uE = q
¡ u ¢2 J E
c 1− c
c 1− c
~ aus der Stromdichte und der elektrischen Feldstärke repräsentiert dabei die
Das Produkt J~E
umgesetzte Leistungsdichte. Mit den übrigen Komponenten µ = 1, 2, 3 ergibt sich
¡
¢
K 1 = qην F 1ν = q −η0 F 10 + η1 F 11 + η2 F 12 + η3 F 13
¶
µ
u
c
E
u
y
x
z
= q − q
¡ u ¢2 − c + q
¡ u ¢2 Bz + q
¡ u ¢2 (−By )
1− c
1− c
1− c
³
´
q
q
~ + ~u × B
~ ~ex
q
(E
+u
B
−u
B
)
=
E
= q
x
y
z
z
y
¡ ¢2
¡ ¢2
1 − uc
1 − uc
..
.
~ =
K
³
´
~ + ~u × B
~
q E
F~
q
q
=
¡ ¢2
¡ ¢2
1 − uc
1 − uc
wobei der Ausdruck
die Lorentz-Kraft darstellt.
³
´
~ + ~u × B
~
F~ = q E
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
39
5.7 Induktionsgesetz aus Sicht der speziellen Relativitätstheorie
Ausgehend vom Induktionsgesetz der Maxwell-Gleichungen, welches man unter Nutzung des
Stokesschen Integralsatzes in Integralform überführt
˜
~
~ = − ∂B
rot E
∂t
˛
~
dA
¨
~ r=−
Ed~
−→
~
∂B
~
dA
∂t
(5.18)
A
∂A
werden eine Leiterschleife der Breite l und Höhe w innerhalb der xy-Ebene betrachtet, welche
sich zunächst im negativen x-Halbraum in einem statischen Magnetfeld der Flussdichte
(
B0~ez für x ≤ 0
~
B(x)
=
0
sonst
befinde und für t > 0 mit der konstanten Geschwindigkeit ~u = u~ex aus diesem herausbewege
(Abbildung 5.8).
y
~
B
w
¯
¯ ∂A ¯
¯
+ w2
¯
¯
¯
¯
~u
¯
1¯
¯
¯
¯
¯~
¯dA
¯
¯
¯
¯
¯
¯
4
2
¯z
x
3
− w2
l
Abbildung 5.8: Bewegung einer Leiterschleife aus einem lokalen statischen Magnetfeld
Wird in dieser Leiterschleife nun eine Spannung induziert? Aus Sicht des Laborsystems L gilt
für die zeitliche Änderung der magnetischen Flussdichte
~
∂B
=0
∂t
⇒
~ =0
rot E
womit keine Induktion auftritt. Im Ruhesystem L0 der bewegten Schleife hingegen ist die Flussdichte wegen
(
B0~ez für x0 < −ut
0
0
~
~
B = B (t) =
0
sonst
~0
B
~0
zeitabhängig und damit die Zeitableitung ∂∂t
sowie die Rotation des elektischen Feldes rot E
ungleich Null, also eine Induktion beobachtbar. Dies stellt jedoch einen Widerspruch zur vorangegangenen Aussage, d.h. zum Relativitätsprinzip, demgemäß die physikalischen Gesetzmäßigkeiten
in jedem Inertialsystem gleich sein müssen, dar.
40
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
Mathematische Betrachtung
Zur Auflösung des Widerspruchs werde das Induktionsgesetz zunächst mathematisch betrachtet. Für ein Vektorfeld F~ (~r, t) und eine beliebige Fläche A der mit der Geschwindigkeit ~u(~r, t)
bewegten Kontur ∂A gilt allgemein die Identität
∂
∂t
¨
~=
F~ (~r, t)dA
¨ ³
˛ ³
¨ ~
´
´
∂ F (~r, t) ~
~−
div F~ (~r, t) ~u(~r, t)dA
~u(~r, t) × F~ (~r, t) d~r +
dA
∂t
A
A
A
∂A
~ womit für die Divergenz
Im vorliegenden Fall entspricht das Vektorfeld F~ dem Magnetfeld B,
~
div B = 0 gilt, also das erste Integral entfällt. Der Einfachheit halber wird weiterhin angenommen, dass die Bewegungsgeschwindigkeit ~u der Flächenkontur konstant sei. Damit folgt nun
∂
∂t
¨
~ A
~=−
Bd
|A {z }
˛ ³
¨ ~
´
∂B ~
~
~u × B d~r +
dA
∂t
(5.19)
A
∂A
=:Φm
mit dem magnetischen Fluss Φm . Eine Umformung mithilfe von Gleichung (5.18) führt schließlich
auf das Induktionsgesetz in der Form
˛
˛ ³
´
∂Φm
~
~ r
~u × B d~r + Ed~
(5.20)
=
−
∂t
∂A
∂A
Mit der gewählten Kontur der Leiterschleife, die im Gegenuhrzeigersinn durchlaufen wird, liefert
~ = −uB~ey auf den Wegstücken 2 und 4 parallel
das erste Integral über das Kreuzprodukt ~u × B
~
zur Bewegungsrichtung wegen d~r ⊥ ~u × B keinen Beitrag. Ebenso ist der Integrand entlang
des Weges 3 Null, da dieser Abschnitt mit Beginn der Verschiebung unmittelbar aus dem Feld
herausbewegt wird und somit hier B = 0 ist. Es folgt demnach
w
w
ˆ−l
˛ ³
ˆ0
ˆ− 2
ˆ2
´
~ d~r = − uB~ey dy~ey − uB~ey dx~ex − uB~ey dy~ey − uB~ey dx~ex
~u × B
| {z }
| {z }
| {z }
w
2
∂A
−l
=0
−w
2
=0
0
=0
−w
2
ˆ
= −uB0
dy = −uB0 w
w
2
sodass man insgesamt aus Sicht des Laborsystems L mit
˛
˛ ³
´
∂Φm
~ r+
~ d~r = −uB0 w
= Ed~
Uind = −
~u × B
∂t
∂A
| {z } ∂A
|
{z
}
−uB0 w
=0
eine Induktionsspannung erhält. Im Ruhesystem L0 der Schleife, in dem sich die Flächenkontur
nicht bewegt, entfällt demgegenüber das Wegintegral in Gleichung (5.19), womit Zeitableitung
und Integration letzlich vertauscht werden können. Entsprechend berechnet sich gemäß
∂Φm
∂t
¨
=
A
Uind = −
w
−ut
¨
ˆ2 ˆ
~0
∂B
∂
∂
∂(l−ut)
~=
~ 0 dA
~=
dA
B
B0 dx0 dy 0 = B0 w
= −uB0 w
∂t
∂t
∂t
∂t
∂Φm
=
∂t
˛
A
~ r = uB0 w 6= 0
Ed~
∂A
−l
−w
2
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
41
auch hier eine Induktionsspannung ungleich Null. Aus einem Vergleich beider Ergebnisse wird
ersichtlich, dass je nach Wahl des Bezugssystems eines der Integrale in Gleichung (5.20) verschwindet und nur das jeweils andere zur Induktionsspannung beiträgt:
˛ ³
´
~ d~r 6= 0
~u × B
˛ ³
´
~ d~r = 0
~u × B
in L:
0
in L :
˛
~ r=0
Ed~
˛
~ r 6= 0
Ed~
Häufig bezeichnet man zur Unterscheidung der beiden Terme ersteren als Bewegungsinduktion
und letzteren als Ruheinduktion.
Relativistische Betrachtung
Eine weitere Erklärung des eingangs beschriebenen scheinbaren Widerspruchs ist über eine relativistische Herangehensweise an das Problem möglich - selbst wenn die Bewegung der Anordnung
eigentlich mit klassischen Geschwindigkeiten v ¿ c erfolgt. Die im Laborsystem L mit der Geschwindigkeit u bewegte Leiterschleife wird dazu aus Sicht eines sich demgegenüber mit der
Geschwindigkeit ~v = v~ex bewegenden Bezugssystems L0 betrachtet (Abbildung 5.9).
L
y
y0
L’
~u0 = ~u −~v
~u
z¯
~v
x
z¯
x0
~u0 = ~u −~v
~v
Abbildung 5.9: Bewegung der Leiterschleife aus Sicht von Laborsystem und bewegtem Bezugssystem
Aufgrund der geringen Relativgeschwindigkeit v der Inertialsysteme kann die Geschwindigkeit
der Schleife in L0 durch gewöhnliche Addition berechnet werden. Zudem vereinfachen sich für
diesen Fall die Transformationen von elektrischem und magnetischem Feld zu
~0 = E
~ + ~v × B
~
E
~0 = B
~
B
Für das System L bestimmt man die Induktionsspannung aus der zeitlichen Änderung des magnetischen Flusses durch die Schleifenfläche gemäß
Uind = −
dΦm
= uB0 w
dt
Da die Leiterschleife in L0 die Geschwindigkeit u0 = u − v aufweist, sich die Grenze des Feldgebietes aber gleichzeitig auch mit v dem linken Leiterstück annähert, lautet die Nettogeschwindigkeit
der vom Feld durchsetzten Fläche u0 + v = u, d.h. sie ist tatsächlich unabhängig vom gewählten
Bezugssystem und der Relativgeschwindigkeit zum Laborsystem. Damit folgt aus der Anwendung
42
KAPITEL 5. RELATIVISTISCHE ELEKTRODYNAMIK
der Feldtransformationen für die Induktionsspannung
˛
˛ ³
´
dΦ0m
~ 0 d~r +
~ 0 d~r
= uB00 w = uB0 w = E
~u0 × B
dt
∂A
˛ ³
˛ ³ ∂A
´
´
~ + ~v × B
~ d~r +
~ d~r
=
E
(~u − ~v ) × B
0
Uind
= −
∂A
˛
=
∂A
˛ ³
´
~ r+
~ d~r
Ed~
~u × B
∂A
∂A
| {z }
|
=0
{z
=uB0 w
}
d.h. es wird die gleiche Spannung induziert, wie aus Sicht des Laborsystems beobachtet wurde.
Zusammenhang mit dem Heringschen Versuch
Wie lässt sich mit den diskutierten Zusammenhängen nun der Heringsche Versuch erklären?
Man betrachte nochmals den Versuchsaufbau, wie er in Abbildung (5.10) schematisch skizziert
ist. In der um das Magnetjoch herum bewegten und an der Außenfläche federnd kontaktierten
Induktionsschleife wird keine Spannungsänderung festgestellt, da das Eisenkreismaterial einen
sehr guten elektrischen Leiter mit hoher Leitfähigkeit κ → ∞ darstellt. Die Oberfäche des Jochs
ist somit eine Äquipotentialfläche, auf der keine Potentialdifferenz messbar ist.
Oberfläche ist
Äquipotentialfläche
U
U
guter Leiter
κ→∞
~
B
Φm 6= 0
U =0
t=0
U
~
B
Φm = 0
dΦm
6= 0 y Uind 6= 0
dt
t > tend
Abbildung 5.10: Bewegung der Leiterschleife während des Heringschen Versuches
Trotzdem ändert sich während der Bewegung der Schleife der magnetische Fluss durch diese,
da zu Beginn der gesamte Magnetkreisquerschnitt umschlossen wird, die Schleife am Ende des
Zyklusses hingegen komplett außerhalb liegt. Mit dieser Flussänderung müsste eigentlich eine Induktionsspannung verbunden sein. Warum wird dann im Experiment keine Spannung gemessen?
Die Antwort auf diese Frage liefert die beschriebene Transformation der Felder aus der speziel~ in der
len Relativitätstheorie. Man muss sich dabei vergegenwärtigen, dass der Ausdruck ~v × B
Gleichung
~0 = E
~ + ~v × B
~
E
vom Prinzip her ein elektrisches Feld darstellt, welches als Gegenfeld dem Aufbau einer Induktionsspannung entgegenwirkt, sodass gilt
˛
~ Gegen d~r = uB0 w − uB0 w = 0
UMess = Uind + E
∂A
ANHANG A. FORMELSAMMLUNG
43
A Formelsammlung
Grundlegende relativistische Zusammenhänge
Relativistische Geschwindigkeitsaddition
u0 =
u±v
1 ± uv
c2
Definition des Lorentz-Faktors γ
1
γ=p
1 − β2
mit
β=
v
c
Zeitdilatation zwischen bewegter Zeit ∆t und Zeit im Ruhesystem ∆t0
∆t0 =
1
∆t
γ
Längenkontraktion zwischen bewegten Maßstäben ∆x und Maßstäben im Ruhesystem ∆x0 (für
Maßstäbe parallel zur Bewegungsrichtung)
∆x0 = γ∆x
Lorentz-Transformation von Ereignissen (ct, x, y, z)
¡
¢
ct = γ ct0 + βx0
ct0 = γ (ct − βx)
x = γ(x0 + vt0 )
x0 = γ(x − vt)
y = y0
y0 = y
z = z0
z0 = z
Ereignis-Vierervektoren (kontravariant bei hochgestelltem Index, kovariant bei tiefgestelltem Index)
xµ = (x0 , x1 , x2 , x3 ) = (ct, x, y, z)
xµ = (−x0 , x1 , x2 , x3 ) = (−ct, x, y, z)
Intervall zweier Ereignisse (bei Lorentz-Transformation invariantes Minkowski-Skalarprodukt
des Differenz-Vierervektors xµ )
I = xµ xµ = −(ct)2 + x2 + y 2 + z 2 = −(ct)2 + d2
Lorentz-Transformation von Vierervektoren in Einsteinscher Summenkonvention (über doppelt auftretende Indizes wird summiert, Indexnotation mit Spaltenindex ν und Zeilenindex µ)
mit der Transformationsmatrix Λ
γ
−γβ 0 0
3
X
−γβ
γ
0 0
x̄µ =
Λµν xν = Λµν xν
Λ=
0
0
1 0
ν=0
0
0
0 1
44
ANHANG A. FORMELSAMMLUNG
Relativistische Mechanik und Dynamik
Definition der gewöhnlichen Geschwindigkeit
~u =
d~l
dt
Definition der Eigengeschwindigkeit
~η =
d~l dt
~u
d~l
=
·
=q
¡ ¢2
dτ
dt dτ
1 − uc
Eigengeschwindigkeit in Viererschreibweise
ηµ =
h
i
dxµ
1
=q
c,
u
,
u
,
u
x y z
¡ ¢2
dτ
1 − uc
Relativistischer Impuls (Erhaltungsgröße und Lorentz-Invariante) in Viererschreibweise
m~u
p~ = m~η = q
¡ ¢2
1 − uc
Relativistische Energie
h
i
m
c,
u
,
u
,
u
pµ = mη µ = q
x
y
z
¡ ¢2
1 − uc
mc2
E = p0 · c = q
¡ ¢2
1 − uc
Ruheenergie (für den Fall u = 0)
ERuhe = m · c2
Energie-Impuls-Vierervektor pµ (Erhaltungsgröße und Lorentz-Invariante)
¶
µ
¡ 0 1 2 3¢
E
1
2
3
µ
, mη , mη , mη
p = p ,p ,p ,p =
c
Relativistische Kraft
d~
p
d~η
~u
F~ =
=m
= mq
¡ ¢2
dt
dt
1 − uc
Speziell für u = 0
F̄⊥ =
1
F⊥
γ
F̄k = Fk
Definition der Minkowski-Kraft
p
d~
p dt
F~
~ = d~
K
=
=q ¡ ¢
2
dτ
dt dτ
1− uc
Kµ =
dpµ
dτ
ANHANG A. FORMELSAMMLUNG
45
Relativistische Elektrodynamik
Transformation der elektrischen und magnetischen Feldstärkekomponenten
Ēy = γ (Ey − vBz )
³
v ´
B̄y = γ By + 2 Ez
c
Ēx = Ex
B̄x = Bx
Ēz = γ (Ez + vBy )
³
´
v
B̄z = γ Bz − 2 Ey
c
Feldstärketensor Fµν und hierzu dualer Feldtensor Gµν
Ey
Ez
Ex
0
Bx
0
c
c
c
Ex
0
0
Bz −By
−
−Bx
Fµν = Ecy
Gµν =
Ez
− c −Bz
−By
0
Bx
c
E
−Bz − cy
− Ecz By −Bx
0
By
− Ecz
0
Ex
c
Bz
Ey
c
− Ecx
0
Definition der Viererstromdichte
J~ = %V0 ~η
J µ = %V0 η µ = (c%V , Jx , Jy , Jz )
Kontinuitätsgleichung in Viererschreibweise
∂J µ
=0
∂xµ
Formulierung der Maxwell-Gleichungen in Viererschreibweise
∂Fµν
= µ0 J µ
∂xν
∂Gµν
=0
∂xν
~ und des elektrischen Skalarpotentials Φ sowie
Definition des magnetischen Vektorpotentials A
µ
des Viererpotentials A
~
~ = − grad Φ − ∂ A
E
∂t
~ = rot A
~
B
µ
A =
µ
Φ
, Ax , Ay , Az
c
¶
Zusammenhang zwischen dem Viererpotential und dem Feldtensor
Fµν =
∂Aν
∂Aµ
−
∂xµ
∂xν
Lorenz-Eichung in klassischer sowie in Viererschreibweise
~+
div A
∂Aµ
=0
∂xµ
1 ∂Φ
=0
c2 ∂t
Inhomogene Wellengleichung für das Viererpotential mit dem D’Alembert-Operator 2 in Viererschreibweise
∂ ∂Aµ
= 2Aµ = −µ0 J µ
∂xν ∂xν
2=
∂ ∂
1 ∂2
=
4
−
∂xν ∂xν
c2 ∂t2
Formulierung der Minkowski-Kraft mithilfe des Feldtensors
K µ = qην F µν
46
ANHANG A. FORMELSAMMLUNG