1.3 Zahlbereiche und algebraische Strukturen
Werbung

26 Lineare Algebra I — 2005–2009
1.3
c Rudolf Scharlau
!
Zahlbereiche und algebraische Strukturen
Dieser Abschnitt stellt überall benutzte algebraische Grundbegriffe bereit: zunächst den Begriff der Verknüpfung auf einer Menge als Verallgemeinerung der
üblichen Rechenoperationen, dann die Begriffe Gruppe, Ring, kommutativer Ring
mit Einselement, Einheiten (invertierbare Elemente) in Ringen, sowie den Begriff
eines Körpers. Wichtige Beispiele algebraischer Strukturen (neben den ganzen,
rationalen und reellen Zahlen) liefert das Rechnen mit Resten“ ganzer Zahlen
”
(sog. mod-m-Addition und mod-m-Multiplikation). Eine vertiefte Behandlung
dieser Struktur (es handelt sich um einen kommutativen Ring mit m Elementen)
wird im nächsten Abschnitt gegeben (Stichwort: Restklassen).
Definition 1.3.1 Eine Verknüpfung auf (oder in) einer Menge M ist eine Vorschrift, die je zwei Elementen x und y aus M (unter Beachtung der Reihenfolge)
ein weiteres Element z von M zuordnet.
Als Notation für das Ergebnis z der Verknüpfung verwendet man die Bezeichnung
z = x · y, x ∗ y, x ◦ y, x $ y, x + y, x ⊕ y, o.ä..
Das Zeichen · bzw. ∗, ◦, $, +, ⊕, . . . nennen wir Verknüpfungssymbol.
Bemerkung 1.3.2 Eine Verknüpfung auf einer Menge M ist dasselbe wie eine
Abbildung M × M → M. Diese wird in diesem Zusammenhang in der Form
(x, y) (→ x · y oder x ∗ y, x ◦ y, x $ y, x + y, x ⊕ y
oder ähnlich geschrieben.
Definition 1.3.3 Eine Verknüpfung ∗ heißt assoziativ, falls für alle a, b, c ∈ M
gilt:
(a ∗ b) ∗ c = a ∗ (b ∗ c) .
Sie heißt kommutativ, falls für alle a, b ∈ M gilt:
a∗ b = b∗ a.
Beispiele 1.3.4
(1) (Z, +), (N, +), (Z, ·), . . .. Die gewöhnliche Addition und Multiplikation von
Zahlen sind assoziative und kommutative Verknüpfungen.
(2) Sei X eine beliebige Menge. Betrachte
M = Abb X := {f | f : X → X Abbildung}
f ◦ g = Hintereinanderausführung von f und g,
f nach g“.
”
Diese Verknüpfung ist assoziativ:
f ◦ (g ◦ h) = (f ◦ g) ◦ h für alle f, g, h ∈ M
c Rudolf Scharlau
!
Lineare Algebra I — 2005–2009
27
(3) Sei X = {1, 2}. Dann kann man die Menge M der Abbildungen ohne großen
Aufwand vollständig hinschreiben: M = {f1 , f2 , f3 , f4 }, wobei
! "
! "
! "
! "
f1 = 11 22 , f2 = 12 21 , f3 = 11 21 , f4 = 12 22 .
(In der ersten Zeile stehen die Elemente des Definitionsbereiches, darunter
jeweils das Bild.)
Definition 1.3.5 Es sei M eine Menge und · eine Verknüpfung auf M. Ein
Element e ∈ M heißt neutrales Element für die Verknüpfung, falls für alle x ∈ M
gilt
e · x = x · e = x.
Bemerkung 1.3.6 Bei gegebener Verknüpfung kann es höchstens ein neutrales
Element e geben. Man sagt also: e ist das neutrale Element.
Beweis: Sei e! ein weiteres neutrales Element. Dann gilt
e · e! = e! (weil e neutral ist, mit x = e! )
e · e! = e (weil e! neutral ist, mit x = e).
Also ist e = e! .
!
Beispiele 1.3.7
(1) Die Verknüpfung + auf N, Z, Q, R hat 0 als neutrales Element.
0+x=x+0=x
(2) Die Verknüpfung · auf N, Z, Q, R hat 1 als neutrales Element.
1·x=x·1=x
(3) Abb X = {f | f : X → X Abbildung} mit der Verkettung “f ◦ g” als
Verknüpfung hat als neutrales Element die identische Abbildung idX : es
gilt idX ◦f = f ◦ idX = f für alle f ∈ Abb X.
Zur Bezeichnungsweise: Wenn das Verknüpfungssymbol + ist, heißt das neutrale
Element immer Null, Schreibweise 0; bei Vektoren auch 0 oder !0 (Nullvektor).
Der folgende Begriff ist grundlegend für alle Gebiete der Mathematik, in denen
algebraische Methoden verwendet werden (Lineare Algebra, Geometrie, Zahlentheorie und weitere).
28 Lineare Algebra I — 2005–2009
c Rudolf Scharlau
!
Definition 1.3.8 Eine Gruppe ist eine Menge G zusammen mit einer Verknüpfung
· auf G, so dass folgende drei Axiome gelten:
(G1) Die Verknüpfung ist assoziativ.
(G2) Es gibt ein neutrales Element e.
(G3) Zu jedem Element a ∈ G gibt es ein b ∈ G, so dass
a· b = b · a = e.
Falls zusätzlich die Verknüpfung kommutativ ist, so heißt auch die Gruppe kommutativ oder abelsch 4 .
Bemerkung 1.3.9 (Eindeutigkeit des inversen Elementes)
Es sei G eine Menge und · eine assoziative Verknüpfung auf G mit neutralem
Element e. Dann gibt es bei gegebenem a ∈ G höchstens ein b ∈ G mit a · b =
b · a = e. Falls es existiert, wird es mit a−1 bezeichnet und heißt das Inverse zu a.
Wenn die Verknüpfung als + geschrieben wird, heißt b das Negative von a,
Bezeichnung −a (statt a−1 ).
Beispiele 1.3.10 (Gruppen)
(1) (N, +) ist keine Gruppe, weil sowohl neutrales Element als auch Inverse
fehlen.
(2) (N0 , +, 0) und (Z ! {0}, ·, 1) besitzen jeweils ein neutrales Element, sind
aber keine Gruppen.
(3) (Z, +), (Q, +), (R, +), (Q ! {0}, ·), (R ! {0}, ·) sind abelsche Gruppen.
(4) Vorschau: wenn K ein beliebiger Körper ist und n ∈ N, so ist die Menge GLn (K) der invertierbaren n × n-Matrizen über K eine Gruppe mit
der Matrixmultiplikation als Verknüpfung, bezeichnet als allgemeine lineare Gruppe vom Grad n über K (siehe Folgerung 2.6.6).
Weitere Beispiele von Gruppen sehen wir in den folgenden Sätzen 1.3.11 und
1.3.17.
Satz 1.3.11 Es sei X eine beliebige Menge. Setze
Per X = {f | f : X → X, f bijektiv} ⊆ Abb X .
Dann ist Per X mit der Komposition von Abbildungen als Verknüpfung eine Gruppe. Neutrales Element ist die identische Abbildung idX . Das inverse Element zu
f ∈ Per X ist die Umkehrabbildung f −1 von f .
Speziell für X = {1, 2, . . . . , n} schreibt man kurz
Sn := Per{1, 2, . . . . , n},
4
die sog. symmetrische Gruppe vom Grad n.
nach Niels Henrik Abel, 1802–1829, norwegischer Mathematiker
c Rudolf Scharlau
!
Lineare Algebra I — 2005–2009
29
Bemerkung Insbesondere für endliches X heißen bijektive Abbildungen von X
in sich selbst auch Permutationen von X, daher die Abkürzung Per X.
Es ist nicht schwierig, die Anzahl aller Permutationen von {1, 2, . . . , n} zu bestimmen. Das Ergebnis ist wie folgt:
Satz 1.3.12
|Sn | = n! = n · (n − 1) · (n − 2) · . . . · 2 · 1
Weitere wichtige Beispiele von Gruppen ergeben sich aus dem ‘Rechnen mit Resten’. Wir beziehen uns hier auf die Division mit Rest aus Satz 1.2.3.
Definition 1.3.13 (mod-m-Addition und -Multiplikation)
Es sei Zm := {0, 1, . . . , m − 1}, also die Menge aller möglichen Reste modulo m.
Auf Zm betrachten wir die beiden Verknüpfungen +m und ·m definiert durch
x +m y := (x + y) mod m
x ·m y := (x · y) mod m
Wir nennen sie Addition bzw. Multiplikation modulo m, kurz mod-m-Addition,
mod-m-Multiplikation.
Die Verknüpfungstafeln für m = 5:
+5
0
1
2
3
4
0
0
1
2
3
4
1
1
2
3
4
0
2
2
3
4
0
1
3
3
4
0
1
2
4
4
0
1
2
3
·5
0
1
2
3
4
0
0
0
0
0
0
1
0
1
2
3
4
2
0
2
4
1
3
3
0
3
1
4
2
4
0
4
3
2
1
5
5
0
1
2
3
4
·6
0
1
2
3
4
5
0
0
0
0
0
0
0
1
0
1
2
3
4
5
2
0
2
4
0
2
4
3
0
3
0
3
0
3
4
0
4
2
0
4
2
Die Verknüpfungstafeln für m = 6:
+6
0
1
2
3
4
5
0
0
1
2
3
4
5
1
1
2
3
4
5
0
2
2
3
4
5
0
1
3
3
4
5
0
1
2
4
4
5
0
1
2
3
5
0
5
4
3
2
1
c Rudolf Scharlau
!
30 Lineare Algebra I — 2005–2009
Die Verknüpfungstafeln für m = 7:
+7
0
1
2
3
4
5
6
0
0
1
2
3
4
5
6
1
1
2
3
4
5
6
0
2
2
3
4
5
6
0
1
3
3
4
5
6
0
1
2
4
4
5
6
0
1
2
3
5
5
6
0
1
2
3
4
6
6
0
1
2
3
4
5
·7
0
1
2
3
4
5
6
0
0
0
0
0
0
0
0
1
0
1
2
3
4
5
6
2
0
2
4
6
1
3
5
3
0
3
6
2
5
1
4
4
0
4
1
5
2
6
3
5
0
5
3
1
6
4
2
6
0
6
5
4
3
2
1
Wir machen einige Beobachtungen zur Addition: Die Tafel für +m hat in allen
Fällen eine offensichtliche zyklische Struktur“: jede Zeile enthält die Elemente
”
0 bis m − 1 in der gleichen Reihenfolge, wobei man nach m − 1 wieder mit der
0 beginnt; die jeweils nächste Zeile entsteht aus der vorigen, indem man um eins
nach links schiebt. All dieses folgt direkt aus der Definition. Insbesondere enthält
jede Zeile eine Permutation der Zahlen 0 bis m − 1: jede dieser Zahlen kommt
genau ein mal vor.
Man kann anhand dieser Beispiele vermuten und auch allgemein zeigen, dass
(Zm , +m ) immer eine Gruppe ist. Für die Multiplikation gibt es verschiedene
Einschränkungen und Hindernisse. Bevor wir dieses weiter diskutieren, wollen
wir zunächst systematisch berücksichtigen, dass wir auf der Menge Zm zwei Verknüpfungen definiert haben, die in einem gewissen Zusammenhang zueinander
stehen, wie man es von den üblichen Zahlbereichen Z, Q, R (und weiteren) kennt.
Hierzu gibt es folgende Definition:
Definition 1.3.14 Ein Ring ist eine Menge R zusammen mit zwei Verknüpfungen + und · , genannt Addition und Multiplikation, für die folgendes gilt:
(R1) (R, +) ist eine abelsche Gruppe.
(R2) die Verknüpfung · ist assoziativ
(R3) (Distributivgesetze)
a · (x + y) = a · x + a · y
(a + b) · x = a · x + b · x
#
für alle a, b, x, y ∈ R .
Meistens wird von einem Ring zusätzlich verlangt, dass er ein neutrales Element
bzgl. der Multiplikation besitzt. Ein solches Element heißt Einselement oder kurz
Eins und wird mit 1R oder einfach 1 bezeichnet. Ein Ring heißt kommutativ, falls
die Multiplikation kommutativ ist: a · b = b · a für alle a, b ∈ R.
Lineare Algebra I — 2005–2009
c Rudolf Scharlau
!
31
Beispiele 1.3.15
Alle folgenden Strukturen sind Ringe mit Einselement. Alle außer (6) (für n ≥ 2)
sind kommutativ.
(1) (Z, +, ·) die ganzen Zahlen mit der üblichen Multiplikation und Addition;
$
(2) R[x] die Menge aller Polynome f (x) = nj=0 aj xj , n ∈ N, aj ∈ R mit der
üblichen Addition und Multiplikation (siehe auch (4));
√
√
(3) Z[ 2] := {x+y 2 | x, y ∈ Z} mit der üblichen Addition und Multiplikation
reeller Zahlen;
(4) F (M, R) die reellwertigen Funktionen auf einer beliebigen Menge M, mit
der üblichen Addition und Multiplikation von Funktionen (f + g)(x) =
f (x) + g(x), (f · g)(x) = f (x) · g(x) für alle f, g ∈ F (M, R);
(5) (Q, +, ·), (R, +, ·),(C, +, ·), die rationalen, reellen bzw. komplexen Zahlen;
jeder Körper ist ein Ring;
(6) Vorschau: die Menge der n × n-Matrizen über einem beliebigen Körper K.
Bei (3) muss man sich vor allem überlegen, dass das Produkt zweier
√ solcher
Zahlen
√ wieder von derselben Bauart ist. Dieses gilt allgemeiner für d anstelle
von 2, für irgendeine feste Zahl d ∈ Z, die kein Quadrat in Z ist. Siehe auch
die Definition eines Unterrings unter 1.3.25.
Wenn man den Begriff eines Ringes benutzt, kann man die Definition der aus der
Analysis bekannten Körper sehr kurz hinschreiben.
Definition 1.3.16 Ein Körper ist ein kommutativer Ring mit Einselement, in
dem jedes von Null verschiedene Element ein Inverses bezüglich der Multiplikation
besitzt.
Nun können wir die wesentlichen Eigenschaften der Addition und Multiplikation
modulo m in folgendem Satz festhalten:
Satz 1.3.17 Für jedes m ∈ N ist (Zm , +m , ·m ) ein kommutativer Ring mit Einselement.
Für den Beweis des Satzes muss man vor allem eine Reihe von Rechengesetzen
überprüfen. Man kann den Beweis mit einigen Hilfsüberlegungen direkt anhand
der Definitionen führen. Transparenter wird er, wenn man ihn im allgemeineren
Kontext von Homomorphismen und Faktorstrukturen entwickelt. Dieses wird erst
in späteren Abschnitten geschehen.
Wir kehren zu den obigen Verknüpfungstafeln zurück. Die Struktur der Tafeln
für die Multiplikation mod m ist komplizierter als bei der Addition. Wir schauen
32 Lineare Algebra I — 2005–2009
c Rudolf Scharlau
!
im Augenblick nur auf die Frage der Permutation. In vielen Fällen ist die Zeile
zu a ∈ Zm , d.h. die Liste der Vielfachen a ·m x, eine Permutation von m = 5 und
m = 7 für alle Zeilen. Bei m = 6 haben wir für a = 2, 3, 4 keine Permutation.
Wir fragen uns für allgemeines m: Für welches a ∈ {0, 1, . . . , m − 1} ist die
a-Zeile der Verknüpfungstafel eine Permutation von {0, 1, . . . , m − 1}? Wenn das
so ist, kommt insbesondere die 1 vor, d.h. die Gleichung a ·m x = 1 ist lösbar. Aus
der Tatsache, dass wir in einem Ring arbeiten, genauer aus dem Assoziativgesetz
der Multiplikation folgt, dass auch die Umkehrung gilt: Sobald die 1 in der aZeile auftaucht, ist bereits die Zeile eine Permutation. Wir entwickeln diesen
Sachverhalt, der diverse Anwendungen hat, gleich in allgemeinen Ringen.
Definition 1.3.18 Ein Element a eines Ringes R mit Einselement heißt invertierbar, oder Einheit, falls ein x ∈ R existiert mit
a· x = 1 = x· a.
(d.h., a besitzt ein Inverses bezüglich der Multiplikation im Sinne des Axioms
(G3) aus 1.3.8 bzw. gemäß 1.3.9).
Bezeichnung:
R∗ := {a ∈ R | aEinheit} .
Die obige Bemerkung 1.3.9 ist auf die Multiplikaton in einem Ring anwendbar
und zeigt: Das Element x ist bei gegebenem a eindeutig bestimmt. Das Element
x heißt das Inverse von a; Bezeichnung: b =: a−1 .
Beispiele 1.3.19
(1) Die invertierbaren Elemente des Ringes Z sind lediglich 1 und −1.
√
√
(2) In dem
obigen
Beispiel
Z[
2]
eines
Ringes
ist
2 nicht invertierbar, aber
√
√
√
1+ 2 ist es, denn (1+ 2)(−1+ 2) = 1, und der zweite Faktor liegt
√ mwieder
im betrachteten Ring. Klar ist, dass dann auch alle Potenzen (1+ 2) , m ∈
Z und ihre Negativen invertierbar sind. In der Zahlentheorie zeigt man, dass
man so alle invertierbaren Elemente erhält; das ist aber etwas schwieriger
einzusehen.
(3) Die invertierbaren Elemente des Polynomrings R[x] sind die konstanten
Polynome ausser der Null. Das zeigt man unter Benutzung des Grades von
Polynomen.
Wir formulieren und beweisen nun allgemein die oben an Beispielen beobachtete
Kennzeichnung von invertierbaren Elementen:
Satz 1.3.20 Ein Element a eines Ringes R mit Einselement ist invertierbar genau dann, wenn die Abbildung
La : R → R, x (→ a · x
bijektiv ist.
Lineare Algebra I — 2005–2009
c Rudolf Scharlau
!
33
Der folgende Satz klärt für beliebiges m, welche Elemente im Ring Zm invertierbar
sind.
Satz 1.3.21 Für m ∈ N ist ein Element a ∈ Zm genau dann invertierbar, wenn
a und m teilerfremd sind:
Z∗m = {a ∈ Zm | ggT(a, m) = 1} .
Beweis: (⇐=) Wenn a und m teilerfremd sind, so gibt es nach dem Satz 1.2.13
ganze Zahlen x, y ∈ Z mit
1 = ggT(a, m) = xa + ym.
Es folgt 1 = (xa + ym) mod m = xa mod m = (x mod m) ·m a also ist a invertierbar mit Inversem x! := x mod m.
(=⇒) Wenn umgekehrt a ∈ Z∗m ist, gibt es ein x ∈ Zm mit x ·m a = 1. Es gibt
also ein Vielfaches ym von m mit xa + ym = 1. Dann muss aber offensichtlich
der ggT von a und m gleich 1 sein.
!
Beispiel Die invertierbaren Elemente in Z6 sind die nicht durch 2 oder 3 teilbaren
Zahlen in Z6 , also 1 und 5, wie oben schon aus der Verknüpfungstafel abgelesen
wurde. In Z10 sind 1, 3, 7, 9 invertierbar.
Bemerkung 1.3.22 Die Einheiten (invertierbaren Elemente) eines Ringes R mit
1 bilden bezüglich der Ringmultiplikation eine Gruppe, die sog. Einheitengruppe
R∗ von R. Speziell für Zm spricht man von der primen Restegruppe Z∗m , genauer
(Z∗m , ·m ).
Besonders interessant und wichtig ist der Fall, dass m = p eine Primzahl ist: dann
kann der ggT von a und p nur 1 oder p sein, und für alle Elemente a ∈ Zp außer
der Null muss er 1 sein, d.h. a ist invertierbar. Dieses beweist den folgenden Satz.
Theorem 1.3.23 Für jede Primzahl p ist (Zp , +p , ·p ) ein Körper.
Zum Schluss dieses Abschnitts beschäftigen wir uns mit Teilstrukturen“ einer
”
Gruppe oder eines Ringes. Das sind Teilmengen, die selbst wieder die entsprechende Struktur tragen.
Definition 1.3.24 (Untergruppe)
Es sei (G, ∗) Gruppe mit neutralem Element und H ⊆ G eine Teilmenge von G.
Dann heißt H Untergruppe von G, genauer von (G, ∗), falls die folgenden drei
Bedingungen erfüllt sind.
(UG1) Für alle x, y ∈ H gilt x ∗ y ∈ H
(man sagt, H ist abgeschlossen unter der Verknüpfung).
(UG2) e ∈ H
(UG3) Für alle x ∈ H gilt x−1 ∈ H
(d.h. H ist abgeschlossen unter Inversenbildung).
34 Lineare Algebra I — 2005–2009
c Rudolf Scharlau
!
Wenn H eine Untergruppe von G ist, kann die Verknüpfung auf H beschränkt
werden. Genauer kann die Einschränkung der Verknüpfung von G × G auf die
Teilmenge H × H als Abbildung H × H → H, also als Verknüpfung auf H
aufgefasst werden. Diese ist trivialerweise erst recht assoziativ. Unter Berücksichtigung der beiden weiteren Bedingungen ist H zusammen mit der von G auf H
eingeschränkten Verknüpfung selbst wieder eine Gruppe.
Hier ist der entsprechende Begriff für Ringe.
Definition 1.3.25 (Unterring)
Es sei (R, +, ·) ein Ring und S ⊆ R eine Teilmenge von R. Dann heißt S Unterring
oder Teilring von R, genauer von (R, +, ·), falls die folgenden Bedingungen erfüllt
sind:
(UR1) S ist Untergruppe von (R, +).
(UR2) Für alle x, y ∈ S gilt x · y ∈ S
(d.h. S ist abgeschlossen unter Multiplikation).
Viele Beispiele von Ringen, wie etwa oben unter 1.3.15 (3) entstehen als Unterringe im Sinne dieser Definition. Etwas allgemeiner gilt:
Beispiel 1.3.26 Für jede natürliche Zahl d ∈ N ist
√
√
Z[ d] := {x + y d | x, y ∈ Z}
ein Teilring der reellen Zahlen (R, +, ·).
c Rudolf Scharlau
!
Lineare Algebra I — 2005–2009
1.4
35
Restklassen und Äquivalenzrelationen
In diesem Abschnitt wird zunächst der mathematische Begriff einer Relation kurz
und informell eingeführt. Eigentliches Thema ist dann das für viele mathematische Konstruktionen zentrale Konzept einer Äquivalenzrelation sowie die daraus
abgeleiteten Begriffe Äquivalenzklasse“, Partition“ einer Menge und Repräsen”
”
”
tantensystem“. Das für uns derzeit wichtigste Beispiel einer Äquivalenzrelation
ist eine Relation zwischen ganzen Zahlen, nämlich die sogenannte Kongruenz
”
modulo m“. Die Äquivalenzklassen dieser Relation heißen Restklassen; auf der
Menge Z/mZ aller Restklassen wird eine algebraische Struktur eingeführt, die
man als eine verbesserte (aber auch abstraktere) Version des Ringes (Zm , +m , ·m )
aus dem vorigen Abschnitt ansehen kann. Wir beenden den Abschnitt mit einer (weiteren) Ergänzung zum vorigen Abschnitt, nämlich der Einführung und
Erläuterung des Isomorphiebegriffs für algebraische Strukturen.
Erklärung 1.4.1 Eine Relation auf einer Menge M bezieht sich auf je zwei Elemente a, b ∈ M (unter Beachtung der Reihenfolge). Es muss für jedes Paar (a, b)
festliegen, ob a in Relation zu b steht“ oder nicht.
”
Beispiele 1.4.2
(1) a ≤ b
(2) a | b
(3) a | b
(4) A ⊆ B
(5) g 1 h
(6) a R b
kleiner gleich“
”
teilt“
”
teilt“
”
ist enthalten in“
”
ist parallel zu “
”
steht in Rel. R zu“
”
auf Z oder R
auf Z
auf N
auf der Potenzmenge P(M) einer Menge M
auf der Menge G aller Geraden der Ebene
allgemeine Situation
Definition 1.4.3 (Kongruenz modulo m)
Sei m eine feste natürliche Zahl. Zwei Zahlen a, b ∈ Z heißen kongruent (genauer:
kongruent modulo m), falls m | b − a. In Zeichen wird dieses geschrieben als
a ≡m b,
manchmal auch kurz a ≡ b.
Die Schreibweise a ≡ b (mod m) statt a ≡m b ist ebenfalls üblich und sogar
gebräuchlicher. Man sollte hier nicht die Klammern weglassen. Die Zeichenfolge
b mod m“ ohne vorhergehendes a ≡m“ hat ja bereits eine eigene Bedeutung:
”
”
sie bezeichnet eine ganze Zahl, den Rest von b nach m ist; siehe oben.
Für die Negation wird die Notation a 3≡m b verwendet.
c Rudolf Scharlau
!
36 Lineare Algebra I — 2005–2009
Satz 1.4.4 Sei m fest. Die Kongruenz-Relation ≡m auf Z ist eine Äquivalenzrelation, d.h. sie hat die folgenden Eigenschaften:
1. a ≡m a für alle a ∈ Z
Reflexivität
2. a ≡m b =⇒ b ≡m a für alle a, b ∈ Z
Symmetrie
3. a ≡m b und b ≡m c =⇒ a ≡m c für alle a, b, c ∈ Z Transitivität
Beweis(skizze): Man benutzt die folgenden Eigenschaften der Teilerrelation,
für festes m ∈ N.
1. m | 0
2. m | x =⇒ m | (−x) für alle x ∈ Z
3. m | x ∧ m | y =⇒ m | (x + y) für alle x, y ∈ Z.
Dieses zeigt man ohne Mühe unter direktem Rückgriff auf die Definition der
Teilerrelation. Wiederum unmittelbar aufgrund der Definition der Eigenschaft
reflexiv, symmetrisch bzw. transitiv zeigt man dann, dass aus 1., 2., 3. jeweils die
entsprechende Eigenschaft 1., 2., 3. einer Äquivalenzrelation folgt.
Hier der Deutlichkeit halber noch einmal die allgemeine Definition einer Äquivalenzrelation:
Definition 1.4.5 Eine Relation ∼ auf einer Menge M heißt Äquivalenzrelation,
wenn sie reflexiv, symmetrisch und transitiv ist:
1. a ∼ a für alle a ∈ M
2. a ∼ b =⇒ b ∼ a für alle a, b ∈ M
3. a ∼ b und b ∼ c =⇒ a ∼ c für alle a, b, c ∈ M
Wir wenden uns dem Zusammenhang zwischen der modulo-Relation und der
Division mit Rest zu. Die definierende Gleichung a = qm + r zeigt unmittelbar,
dass der Rest r = a mod m kongruent zu a ist: r ≡m a. Diese Beobachtung ist
der Ausgangspunkt für folgenden Satz:
Satz 1.4.6 Sei m ∈ N fest. Zwei Zahlen a, b ∈ Z sind kongruent modulo m genau
dann, wenn sie bei Division durch m denselben Rest lassen. M.a.W.
a ≡m b
⇐⇒
a mod m = b mod m.
Hilfssatz Es seien r, s ∈ Zm mit r ≡m s. Dann ist r = s.
Beweis: s − r ist nach Voraussetzung ein Vielfaches von m, andererseits vom
Betrag her kleiner als m, weil r und s beide zwischen 0 und m − 1 liegen. Es
bleibt nur die Möglichkeit s − r = 0.
!
Lineare Algebra I — 2005–2009
c Rudolf Scharlau
!
37
Beweis von 1.4.6: Wir setzen vorbereitend r := a mod m, s := b mod m; dann
gilt a = q1 m + r, b = q2 m + s mit q1 , q2 ∈ Z. Nun der eigentliche Beweis, der wie
bei jeder Äquivalenz aus zwei Teilen besteht:
zu ⇐=“: Voraussetzung ist hier r = s. Dann ist b − a = (q2 − q1 )m + (s − r) =
”
(q2 − q1 )m ein Vielfaches von m, also a ≡m b, wie gewünscht.
zu =⇒“ Wegen a ≡m b ist b − a = (q2 − q1 )m + (s − r) ein Vielfaches von m,
”
also (q2 − q1 )m + (s − r) = qm, q ∈ Z, also s − r = (q + q1 − q2 )m ein Vielfaches
von m, also r ≡m s. Aus dem Hilfssatz folgt r = s, wie gewünscht.
!
Die Tatsache, dass ≡m eine Äquivalenzrelation ist, kann man alternativ zu dem
früheren Beweis von Satz 1.4.4 leicht aus dem letzten Satz gewinnen. Hierzu
betrachtet man die Funktion
f : Z → Z, x (→ x mod m.
Satz 1.4.6 besagt, dass die Relation durch die Bedingung f (a) = f (b)“ gegeben
”
ist. Hieraus folgen sofort die drei Eigenschaften einer Äquivalenzrelation. Allgemeiner gilt offenbar Folgendes:
Bemerkung 1.4.7 Es sei M eine beliebige Menge und f : M → Y eine Abbildung. Dann ist die durch f (a) = f (b) definierte Relation auf M eine Äquivalenzrelation.
Zusammengefasst liefert also die Kennzeichnung der Kongruenzrelation gemäß
1.4.6 eine neue und vielleicht eingängigere Erklärung, warum diese Relation eine
Äquivalenzrelation ist.
Wir führen die Diskussion zu 1.4.6 und 1.4.4 weiter, indem wir den Begriff der
Äquivalenzklasse ins Spiel bringen:
Definition 1.4.8 (Äquivalenzklassen und Kongruenzklassen)
a) Es sei E eine Äquivalenzrelation auf der Menge M und a ∈ M. Die Äquivalenzklasse von a bezüglich E ist die Teilmenge aller zu a in Relation stehenden Elemente von a:
[a]E := {x ∈ M | xEa}
b) Die Äquivalenzklassen für die Kongruenzrelation ≡m heißen Restklassen
(genauer: Restklassen modulo m) und werden mit [a]m bezeichnet. Es gilt
also für a ∈ Z:
[a]m = {x ∈ Z | x ≡m a}
c Rudolf Scharlau
!
38 Lineare Algebra I — 2005–2009
Zahlenbeispiel m = 4:
[0]4
[1]4
[2]4
[3]4
=
=
=
=
{. . . , −8, −4, 0, 4, 8, . . .}
{. . . , −7, −3, 1, 5, 9, . . .}
{. . . , −6, −2, 2, 6, 10, . . .}
{. . . , −5, −1, 3, 7, 11, . . .}
Es gibt keine weiteren Restklassen modulo 4, da zum Beispiel:
[4]4 = [0]4 ,
[5]4 = [1]4 ,
[6]4 = [2]4 ,
...
In Verallgemeinerung dieses Zahlenbeispiels hat man die folgende Beschreibung
aller Restklassen:
Satz und Definition 1.4.9 Sei m ∈ N.
a) Es gibt genau m Äquivalenzklassen für die Relation ≡m , nämlich die Mengen [a]m für a = 0, 1, . . . , m − 1 .
b) Die Menge aller Restklassen modulo m wird mit Z/mZ (lies: Z nach mZ“
”
oder Z modulo mZ“) bezeichnet. Es ist also
”
Z/mZ := {[a]m | a ∈ Zm } = {[0]m , [1]m , . . . , [m − 1]m }.
Beweis: Wir zeigen erstens, dass diese Restklassen alle voneinander verschieden
sind. Anderenfalls gäbe es r, s ∈ Zm mit r 3= s und [r]m = [s]m . Dann wäre
insbesondere r ∈ [s]m , also r ≡m s. Nach dem obigen Hilfssatz aus dem Beweis
von 1.4.6 wäre dann doch r = s, ein Widerspruch zur Annahme.
Wir müssen zweitens zeigen, dass es keine weiteren Restklassen gibt. Hierzu überlegen wir uns naheliegenderweise, dass für ein beliebiges a ∈ Z gilt
[a]m = [r]m , wobei wir r := a mod m wählen. Nun gilt jedenfalls r ≡m a (siehe
oben), also r ∈ [a]m , d.h. [r]m und [a]m haben das Element r gemeinsam. Nun
kann man sich ganz allgemein (für beliebige Äquivalenzrelationen) überlegen,
dass zwei Äquivalenzklassen, die wenigstens ein Element gemeinsam haben, sogar übereinstimmen. Diese Tatsache (noch etwas ergänzt) halten wir in folgendem
Satz fest, der dann auch den laufenden Beweis abschließt.
Verallgemeinerung: Für eine allgemeine Äquivalenzrelation E auf einer Menge
M kann man ebenfalls die Menge aller Äquivalenzklassen betrachten. Hierfür ist
die Bezeichnung M/E üblich. Wenn die Relation durch ein typisches Symbol wie
∼ bezeichnet wird, schreibt man entsprechend M/∼. Für die eben eingeführte
Menge der Restklassen modulo m könnte man also systematisch Z/≡m statt
Z/mZ schreiben. Die Bezeichnung Z/mZ findet ihre systematische Einordnung
in eine allgemeinere Situation erst bei den sogenannten Faktorgruppen, die man
später in der Algebra einführt.
Lineare Algebra I — 2005–2009
c Rudolf Scharlau
!
39
Satz 1.4.10 Sei E eine Äquivalenzrelation auf der Menge M.
a) Die Äquivalenzklassen bezüglich E bilden eine Partition (oder Zerlegung)
von M. Das heißt:
1. Jedes Element von M liegt in einer Äquivalenzklasse.
2. Zwei Äquivalenzklassen sind disjunkt (d.h. haben kein Element gemeinsam), oder sie stimmen überein.
b) Für zwei beliebige Elemente a, b ∈ M gilt
aEb ⇐⇒ [a]E = [b]E .
Beweis:
zu a) Behauptung 1: Dieses ist klar, denn ein beliebiges a ∈ M liegt in seiner
eigenen Äquivalenzklasse, a ∈ [a]E . (Wir haben Aussage 1 explizit aufgeführt,
um den allgemeinen Begriff der Partition zu erklären: Eine Partition einer Menge
besteht aus Teilmengen, deren Vereinigung die gesamte Menge ist.)
zu a) Behauptung 2: Es seien [a]E und [b]E zwei Äquivalenzklassen, die wenigstens ein Element gemeinsam haben. Wir zeigen in einem ersten Schritt aEb.
Dazu wähle ein Element c ∈ [a]E ∩ [b]E . Dann gilt cEa, also auch aEc, ferner cEb.
Aus der Transitivität folgt nun aEb, wie gewünscht.
Nun folgern wir aus aEb, dass [a]E = [b]E ist. Weil die Situation symmetrisch
in a und b ist, genügt es, [a]E ⊆ [b]E zu zeigen. (Dann gilt automatisch auch
die umgekehrte Inklusion, also Gleichheit der beiden Mengen.) Sei also x ∈ [a]E .
Dann gilt nach Definition xEa, wegen der Voraussetzung aEb und der Transitivität also auch xEb, was genau die gewünschte Beziehung x ∈ [b]E liefert.
zu Behauptung b): Dieses ergibt sich sofort aus dem unter a) zum zweiten
Punkt Gesagten.
!
Definition 1.4.11 Sei E eine Äquivalenzrelation auf M. Eine Teilmenge V ⊆ M
heißt Repräsentantensystem oder Vertretersystem für E, wenn jede Äquivalenzklasse [a]E genau ein Element r ∈ V enthält, den sogenannten Repräsentanten
oder Vertreter der Klasse.
Es gilt dann nach dem vorigen Satz 1.4.10 [a]E = [r]E , die Menge aller Äquivalenzklassen kann also als
M/E = {[r]E | r ∈ V }
beschrieben werden, und hier tritt keine Äquivalenzklasse doppelt auf.
Beispiel: Für die Äquivalenzrelation ≡m auf Z ist die bekannte Menge Zm =
{0, 1, 2, . . . , m − 1} ein Vertretersystem. Es gibt beliebig viele weitere Möglichkeiten. Eine naheliegende Wahl wäre z.B. {1, 2, . . . , m}. Man kann auch die vom Betrag her kleinstmöglichen Reste“ als Vertreter wählen, also etwa {−2, −1, 0, 1, 2}
”
c Rudolf Scharlau
!
40 Lineare Algebra I — 2005–2009
für m = 5, für allgemeines ungerades m = 2k + 1 die Menge {−k, −(k −
1), . . . , −1, 0, 1, . . . , k − 1, k}.
Für ein Vertretersystem reicht es, m Elemente a1 , . . . , am anzugeben, von
denen keine zwei kongruent modulo m sind. Dieses gilt ganz allgemein für jede Äquivalenzrelation mit m (also nur endlich vielen) Äquivalenzklassen. Denn
wenn die ai alle voneinander verschieden sind, dann sind nach Definition eines
Vertretersystems (und dem letzten Satz) auch ihre Klassen [ai ]E alle verschieden,
und aus Anzahlgründen sind das dann alle Klassen.
Für den nächsten Satz können wir die Äquivalenzklassen zumindest für einen
Augenblick vergessen; er handelt, wenn man so will, von einer algebraischen Zusatzeigenschaft der Kongruenzrelation.
Satz 1.4.12 (Rechnen mit Kongruenzen) Sei m ∈ N fest. Kongruenzen (modulo m) darf man addieren und multiplizieren. Genauer gilt Folgendes: Seien
a, a! , b, b! ∈ Z so, dass
a ≡m a! und b ≡m b!
Dann ist auch
a + b ≡m a! + b!
a · b ≡m a! · b!
Mit dem nächsten, für vieles grundlegenden und stark verallgemeinerungsfähigen
Satz kommen wir zum eigentlichen Ziel dieses Abschnittes.
Satz 1.4.13 (Restklassenaddition und -multiplikation)
a) Auf der Menge Z/mZ aller Restklassen modulo m werden durch
[a]m ⊕ [b]m := [a + b]m und [a] $ [b] = [a · b]
zwei Verknüpfungen ⊕ und $ sinnvoll definiert.
b) Z/mZ zusammen mit ⊕ und $ ist ein kommutativer Ring mit Einselement.
Beweis: zu Teil a): Behauptet wird, dass die Verknüpfung (wir betrachten zunächst
die Addition) bei gegebenem [a]m und [b]m ein eindeutiges Ergebnis liefert. Das
heißt, die rechte Seite [a + b]m darf nur von [a]m und [b]m abhängen (aber nicht
von a und b selbst).
Zu zeigen ist also folgendes: wenn a! , b! ∈ Z weitere Elemente sind so, dass
[a]m = [a! ]m und [b]m = [b! ]m , dann muss auch
!
[a + b]m = [a! + b! ]m
c Rudolf Scharlau
!
Lineare Algebra I — 2005–2009
41
sein. Aus den Voraussetzungen [a]m = [a! ]m und [b]m = [b! ]m folgt a ≡m a! und
b ≡m b! (siehe 1.4.10 b)). Nach 1.4.12 folgt: a + b ≡m a! + b! . Wieder nach 1.4.10
b) folgt [a + b]m = [a! + b! ]m , wie gewünscht.
Der Beweis für die Multiplikation ist völlig analog.
zu Teil b): Hier sind keinerlei komplizierte Rechnungen erforderlich. Alle Gesetze ergeben sich aus der Definition der Verknüpfungen der entsprechenden Regel
in Z. Als Beispiel betrachten wir das Distributivgesetz: Gegeben sind hier drei
Elemente [a]m , [x]m , [y]m ∈ Z/mZ. Dann gilt
[a]m $ ([x]m ⊕ [y]m ) = [a]m $ [x + y]m
= [a · (x + y)]m
= [a · x + a · y]m
= [a · x]m ⊕ [a · y]m
= [a]m $ [x]m ⊕ [a]m $ [y]m
!
Für die Aufstellung von Verknüpfungstafeln oder sonstige konkrete Rechnungen
wird man alle Klassen durch ihre jeweiligen Vertreter darstellen, d.h. die Menge
Z/mZ in der Form {[r]m | r ∈ Zm } benutzen. Dann müssen auch Summen und
Produkte entsprechend ersetzt werden:
[a]m ⊕ [b]m = [a + b]m = [(a + b) mod m]m
[a]m $ [b]m = [a · b]m = [(a · b) mod m]m
Hier kommt also in natürlicher Weise die früher definierte mod-m-Addition und
-Multiplikation auf Zm ins Spiel:
Bemerkung Für je zwei Elemente a, b ∈ Zm gilt
[a]m ⊕ [b]m = [a +m b]m ,
[a]m $ [b]m = [a ·m b]m .
Beispiel: Die Verknüpfungstafeln für (Z/5Z, ⊕, $):
⊕
[0]5
[1]5
[2]5
[3]5
[4]5
[0]5
[0]5
[1]5
[2]5
[3]5
[4]5
[1]5
[1]5
[2]5
[3]5
[4]5
[0]5
[2]5
[2]5
[3]5
[4]5
[0]5
[1]5
[3]5
[3]5
[4]5
[0]5
[1]5
[2]5
[4]5
[4]5
[0]5
[1]5
[2]5
[3]5
$
[0]5
[1]5
[2]5
[3]5
[4]5
[0]5
[0]5
[0]5
[0]5
[0]5
[0]5
[1]5
[0]5
[1]5
[2]5
[3]5
[4]5
[2]5
[0]5
[2]5
[4]5
[1]5
[3]5
[3]5
[0]5
[3]5
[1]5
[4]5
[2]5
[4]5
[0]5
[4]5
[3]5
[2]5
[1]5
Wenn man sich die eckigen Klammern und die Indizes 5 wegdenkt, sind das genau
die früheren Tafeln für +5 und ·5 . Mit anderen Worten, bis auf Bezeichnungen hat
c Rudolf Scharlau
!
42 Lineare Algebra I — 2005–2009
man die gleichen Tafeln wie bei +5 und ·5 . Zwei mathematische Strukturen (hier
Gruppen oder Ringe), die sich in diesem Sinne nicht wesentlich voneinander unterscheiden, nennt man isomorph. Um zu einer mathematisch präzisen Defnition
zu kommen, präzisiert man zunächst den Bezeichnungswechsel“ als eine bijektive
”
Abbildung zwischen den zugehörigen Mengen, hier ϕ : Zm → Z/mZ, r (→ [r]m .
Diese ist mit den Verknüpfungen verträglich“: ϕ(r +m s) = ϕ(r) ⊕ ϕ(s) und auch
”
ϕ(r ·m s) = ϕ(r) $ ϕ(s)
Diese Überlegungen führen auf die folgende
Definition 1.4.14 (Isomorphismus, Isomorphie)
a) Ein Isomorphismus einer Gruppe (G, ·) auf eine Gruppe (H, ∗)
(bzw. eines Ringes (R, +, ·) auf einen Ring (S, ⊕, $) )
ist eine Abbildung ϕ : G → H (bzw. ϕ : R → S) mit folgenden beiden
Eigenschaften:
1. ϕ ist bijektiv.
2. ϕ ist verknüpfungstreu, d.h. für alle x, y ∈ G gilt ϕ(x · y) = ϕ(x) ∗ ϕ(y)
(bzw. im Fall der Ringe ϕ(x + y) = ϕ(x) ⊕ ϕ(y) und ϕ(x · y) =
ϕ(x) $ ϕ(y) für alle x, y ∈ R).
Eine verknüpfungstreue Abbildung wird auch Homomorphismus genannt.
b) Eine Gruppe (G, ·) heißt isomorph zu einer Gruppe (H, ∗), falls ein Isomorphismus von (G, ·) auf (H, ∗) existiert; entsprechend für Ringe.
Ähnlich wie beim Begriff gleichmächtig“ kommt es auf die Reihenfolge von G
”
und H nicht an, wir können auch sagen G und H sind isomorph (zueinander);
siehe die obige Bemerkung nach der Definition 1.1.21.
Beispiel zur Isomorphie: Als erste Gruppe betrachten wir das direkte Produkt
(Z2 × Z2 , +2 ). Es hat die Verknüpfungstafel
+2
(0, 0)
(1, 0)
(0, 1)
(1, 1)
(0, 0)
(0, 0)
(1, 0)
(0, 1)
(1, 1)
(1, 0)
(1, 0)
(0, 0)
(1, 1)
(0, 1)
(0, 1)
(0, 1)
(1, 1)
(0, 0)
(1, 0)
(1, 1)
(1, 1)
(0, 1)
(1, 0)
(0, 0)
Für die Definition der zweiten Gruppe betrachten wir die folgenden Elemente
(Permutationen) in der symmetrischen Gruppe S4 :
%
&
%
&
%
&
1 2 3 4
1 2 3 4
1 2 3 4
π=
, ρ=
, σ=
.
2 1 4 3
3 4 1 2
4 3 2 1
c Rudolf Scharlau
!
Lineare Algebra I — 2005–2009
43
(Es handelt sich also um die paarweisen Vertauschungen innerhalb von jeweils
zwei Zweiermengen in {1, 2, 3, 4}.) Dann ist V4 := {id, π, ρ, σ} eine Untergruppe
von S4 , die sogenannte Kleinsche Vierergruppe. Ihre Verknüpfungstafel ist
◦ id π ρ σ
id id π ρ σ
π π id σ ρ
ρ ρ σ id π
σ σ ρ π id
In beiden betrachteten Gruppen gilt: Jedes Element verknüpft mit sich selbst
ergibt das neutrale Element; wenn man zwei der drei nicht neutralen Elemente
verknüpft, erhält man das dritte. Wenn man diese Tafel in neutralen“ Bezeich”
nungen aufschreibt, ergibt sich
∗
e
a
b
c
e
e
a
b
c
a
a
e
c
b
b
b
c
e
a
c
c
b
a
e
Mit e = (0, 0), a = (1, 0), b = (0, 1), c = (1, 1) liefert das die erste Verknüpfungstafel, mit e = id, a = π, b = ρ, c = σ die zweite. Die Gruppen Z2 × Z2 und V4
mit ihren jeweiligen Verknüpfungen sind also gleich bis auf Bezeichnungen“, das
”
heißt isomorph.
Als Isomorphismus im Sinne der exakten Definition kann man die Abbildung
ϕ : Z2 × Z2 → V4 , (0, 0) (→ id, (1, 0) (→ π, (0, 1) (→ ρ, (1, 1) (→ σ
nehmen.
Wir halten schließlich noch die obige Beobachtung, die zur Einführung des Begriffes Anlass war, als Satz fest:
Satz 1.4.15 Für jede natürliche Zahl m ist der Ring (Zm , +m , ·m ) isomorph zu
dem Ring (Z/mZ, ⊕, $). Ein Isomorphismus ist durch die bijektive Abbildung
r (→ [r]m gegeben.
In Wirklichkeit liefern unsere Überlegungen sogar eine schärfere Aussage. Wir
erinnern daran, dass wir nie vollständig gezeigt haben, dass (Zm , +m , ·m ) alle Eigenschaften eines Ringes besitzt: Die Assoziativgesetze und das Distributivgesetz
waren nicht so leicht aus der Definition abzuleiten. Auf der anderen Seite war es
überhaupt kein Problem (auch wenn wir nicht alles hingeschrieben haben), die
44 Lineare Algebra I — 2005–2009
c Rudolf Scharlau
!
Ringeigenschaften von (Z/mZ, ⊕, $) zu zeigen. Nun sieht man sehr leicht, dass
sich mittels der bijektiven verknüpfungstreuen Abbildung alle Rechnungen sofort
von (Z/mZ, ⊕, $) auf (Zm , +m , ·m ) übertragen. Das heißt, die Ringeigenschaften
von (Zm , +m , ·m ) folgen aus denen von (Z/mZ, ⊕, $). Wir können das Prinzip
wie folgt formulieren:
Seien (R, +, ·) und (S, ⊕, $) zwei Mengen mit jeweils zwei Verknüpfungen und
ϕ : R → S bijektiv und verknüpfungstreu. Wenn eins der beiden Objekte (R, +, ·)
und (S, ⊕, $) ein Ring ist, dann ist es auch das andere.
Abschließend merken wir noch an, dass das Entsprechende natürlich auch für
Gruppen gilt.
Lineare Algebra I — 2005–2009
1.5
c Rudolf Scharlau
!
45
Die komplexen Zahlen
Die komplexen Zahlen sind unverzichtbar für nahezu jede Art von höherer Mathematik. Systematisch gehören sie zum einen in die Analysis: Viele bekannte
Funktionen sind in natürlicher Weise auf der Menge C der komplexen Zahlen
definiert; genannt seien für den Augenblick nur die Exponentialfunktion sowie
die trigonometrischen Funktionen. Auch wenn man vorrangig an reellen Funktionen interessiert ist, werden die Eigenschaften oft transparenter, wenn man sie
(auch) als komplexe Funktionen betrachtet. Auf der anderen Seite gehören die
komplexen Zahlen genauso auch in die Algebra und Zahlentheorie: Sie stellen eine
natürliche Erweiterung der üblichen Zahlbereiche dar, auf die man beim Lösen
algebraischer Gleichungen geführt wird. In der Linearen Algebra sind die komplexen Zahlen, selbst wenn man vorrangig an reellen Vektorräumen interessiert
ist, ein unverzichtbares Hilfsmittel für die in Abschnitt 3.2 folgende Behandlung
von Eigenvektoren und Eigenwerten von Matrizen. Übrigens sind die komplexen
Zahlen auch Standard in vielen Anwendungsbereichen der Mathematik. Z.B. ist
die in der Physik, der Elektrotechnik oder der Informationstechnik verwendete
Mathematik ohne komplexe Zahlen kaum denkbar.
Systematisch könnte man die Behandlung der komplexen Zahlen auf den Abschnitt 1.3 aufbauen. Wir werden das jedoch nicht tun. Stattdessen geben wir
eine Beschreibung aus dem Stand”, damit dieser Skriptteil auch unabhängig
”
verwendet werden kann. Für diejenigen, die Abschnitt 1.3 vor diesem Abschnitt
studiert haben, machen wir einige verbindende Bemerkungen.
1.5.1 Beschreibung der komplexen Zahlen:
1. Auf der Menge C der komplexen Zahlen sind zwei Verknüpfungen + und ·
definiert, d.h.
C × C 7 (z, w) (−→ z + w ∈ C
C × C 7 (z, w) (−→ z · w ∈ C
2. Für + und · gelten jeweils das Assoziativ- und Kommutativ-Gesetz sowie
das Distributivgesetz z · (w + w ! ) = z · w + z · w ! ; es gibt neutrale Elemente
0 für + und 1 für ·.
3. Es gilt R ⊂ C; die Verknüpfungen eingeschränkt auf R sind die dort gegebene Addition und Multiplikation.
4. Es gibt ein Element i ∈ C mit i2 := i · i = −1.
5. Es ist C = {a + b · i | a, b, ∈ R}. Dabei ist
a1 + b1 · i = a2 + b2 · i ⇐⇒ a1 = a2 ∧ b1 = b2
a =: Re z heißt Realteil und b =: Im z Imaginärteil von z = a + b · i = a + bi.
c Rudolf Scharlau
!
46 Lineare Algebra I — 2005–2009
Beispiel 2 + 3i und 5 − 2i := 5 + (−2)i sind komplexe Zahlen.
(2 + 3i) + (5 − 2i) = (2 + 5) + (3i + (−2)i)
= (2 + 5) + (3 + (−2))i
=7+i
(2 + 3i) · (5 − 2i)
= 2 · 5 + 2 · (−2) · i + 3 · i · 5 + 3 · i · (−2) · i
= 2 · 5 + 2 · (−2) · i + 3 · 5 · i + 3(−2) · i · i
= 10 + (−6)(−1) + (−4 + 15) · i
= (10 + 6) + (15 − 4)i
= 16 + 11i
Unabhängig von speziellen Zahlenwerten kann man aus der obigen Beschreibung
folgende allgemeine Regeln herleiten:
Satz 1.5.2
Gegeben seien zwei komplexe Zahlen z = a + bi und w = c + di,
dabei a, b, c, d ∈ R. Dann gilt
a) z + w = (a + c) + (b + d)i
b) z · w = (ac − bd) + (ad + bc)i
c) z besitzt ein Negatives −z so, dass z + (−z) = 0, nämlich −z := (−a) +
(−b)i.
d) Wenn z 3= 0 ist. so besitzt z ein Inverses z −1 so, dass z · z −1 = 1, nämlich
z −1 :=
a2
1
(a − bi).
+ b2
Die Formel für das Inverse kann man sich leicht herleiten, indem man das gesuchte
1
Inverse als Bruch a+bi
schreibt und dann durch Erweitern mit a − bi den Nenner
reell macht. Ein Beweis ist das nicht; der wird dadurch erbracht, dass man für das
unter d) angegebene Element z −1 nachrechnet, dass es tatsächlich die Bedingung
z −1 · z = 1 für das Inverse von z erfüllt.
Es bietet sich jetzt an, die Begriffe aus dem früheren Abschnitt 1.3 über algebraische Strukturen ins Spiel zu bringen. Die unter 1.5.1 genannten Regeln besagen
bereits, dass C ein Ring ist. Mit 1.5.2.d) ist nun die zusätzliche Eigenschaft eines
Körpers gezeigt. Wir halten fest:
Folgerung 1.5.3 Die komplexen Zahlen (C, +, ·) bilden einen Körper.
Lineare Algebra I — 2005–2009
c Rudolf Scharlau
!
47
Bei der letzten Folgerung handelt es sich um einen bedingten Satz“: wenn ein
”
algebraisches Objekt die Eigenschaften aus unserem Wunschkatalog“ 1.5.1 hat,
”
dann auch die weiteren Eigenschaften aus 1.5.2, und zusammengenommen bedeutet dieses, dass ein Körper vorliegt. Aus den bisherigen Überlegungen folgt
noch nicht die Existenz von C. (Die Regeln aus 1.5.1 könnten sogar in sich widersprüchlich sein, was glücklicherweise nicht der Fall ist.) Dass C mit obigen
Eigenschaften tatsächlich exisitiert, wird z.B. durch folgende Konstruktion geliefert:
Satz 1.5.4 (Konstruktion der komplexen Zahlen)
Betrachte auf der Menge C := R2 = R × R = {(a, b) | a, b ∈ R} als Verknüpfung
+ die übliche Vektoraddition (a, b) + (c, d) = (a + c, b + d) sowie die folgende
Multiplikation:
(a, b) · (c, d) := (ac − bd, ad + bc).
Dann gilt folgendes:
a) Die Verknüpfungen erfüllen das Assoziativ-, Kommutativ- und Distributivgesetz.
b) 1 := (1, 0) ist neutrales Element für die Multiplikation.
c) Mit Elementen (a, 0) wird wie in R gerechnet:
(a, 0) + (b, 0) = (a + b, 0), (a, 0) · (b, 0) = (a · b, 0).
d) Das Element i := (0, 1) erfüllt i2 = −1.
Insgesamt gelten bei Identifikation von R mit {(a, 0) | a ∈ R} ⊂ C = R2 alle
geforderten Eigenschaften.
Die in diesem Satz angegebene Definition der Addition und Multiplikation ist
natürlich alles andere als willkürlich. Vielmehr wird sie durch die Formeln aus
a) und b) von Satz 1.5.2 sogar erzwungen. Der Beweis des Satzes erfolgt durch
einfaches, aber längliches Nachrechnen aller Behauptungen anhand der Definitionen. In der Algebra lernt man, wie man durch mehr Theorie den Umfang dieser
Rechnungen fast auf Null reduzieren kann.
Aus dem letzten Satz (eigentlich schon aus Satz 1.5.1.5) liest man ab, dass komplexe Zahlen als Punkte (oder Vektoren) der Ebene interpretiert werden können.
Dabei entspricht die Addition der Vektoraddition. Diese geometrische Sichtweise
legt die folgende Definition nahe:
'
Definition 1.5.5 Für z = x + yi ∈ C heißt |z| := x2 + y 2 der Betrag von z.
c Rudolf Scharlau
!
48 Lineare Algebra I — 2005–2009
Der Betrag einer komplexen Zahl ist also die übliche Länge des zugehörigen Vektors (siehe Definition 2.9.16), bzw. der Abstand des entsprechenden Punktes vom
Nullpunkt.
Die Zahl |z|2 = x2 + y 2 kann man auch als (x + yi)(x − yi) schreiben. Der zweite
Faktor war uns schon beim Inversen einer komplexen Zahl begegnet. Für diese
Zahl gibt es einen eigenen Namen.
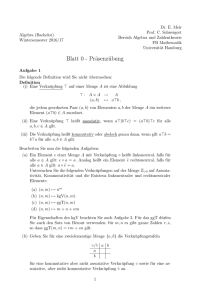
Definition 1.5.6 (Konjugiert-komplexe Zahl)
Für eine gegebene komplexe Zahl z = x + yi, x, y ∈ R heißt z := x − yi die zu z
konjugierte oder konjugiert-komplexe Zahl.
Geometrisch entspricht der Übergang zur konjugiert-komplexen Zahl der Spiegelung an der reellen Achse (x-Achse).
Im
"
#
b
|z |
a + ib = z
!
a
$
−b
Re
a − ib = z
Für die komplexe Konjugation (also die Abbildung C → C, z (→ z) gelten die
folgenden Rechenregeln:
Satz 1.5.7 (Komplexe Konjugation) Für alle komplexen Zahlen z, w ∈ C
gilt:
1. z + w = z + w
2. z · w = z · w
3. |z|2 = zz
4. z −1 =
z
, falls z 3= 0.
|z|2
c Rudolf Scharlau
!
Lineare Algebra I — 2005–2009
49
Auch wenn die Situation nicht ganz analog ist, bietet es sich hier an, den Bezug zu
Definition 1.4.14 herzustellen. Wenn wir für den Moment der komplexen Konjugation
einen Namen geben, etwa σ, also
σ : C → C, σ(z) = z,
dann schreiben sich die Regeln 1. und 2. als σ(z + w) = σ(z) + σ(w) und σ(z · w) =
σ(z) · σ(w). Mit anderen Worten, σ ist verknüpfungstreu für Plus und Mal, also ein
Ringhomomorphismus. Ferner ist σ bijektiv, sogar zu sich selbst invers. Somit ist
σ sogar ein Isomorphismus. Ein Isomorphismus, dessen Definitions- und Zielbereich
übereinstimmen wird ganz allgemein (für alle Arten von mathematischen Strukturen)
als Automorphismus (der betreffenden Struktur, hier der komplexen Zahlen) bezeichnet. Automorphismen tragen zur Frage der Isomorphie nichts bei, weil ohnehin jedes
Objekt zu sich selbst isomorph ist. Vielmehr beschreiben Automorphismen die Sym”
metrien” einer Struktur.
Wir kehren zurück zur Betragsfunktion der komplexen Zahlen. Sie hat die folgenden Eigenschaften, von denen 1., 2. und 4. schon aus der Vektorrechnung bekannt
sind. Eigenschaft 3. bezieht sich auf die Multiplikation und ist neu. Sie folgt sofort
aus der entsprechenden Eigenschaft 1.5.7.2 für die komplexe Konjugation.
Satz 1.5.8 (Betragsfunktion) Für alle komplexen Zahlen z, w ∈ C gilt:
1. |z| ≥ 0
2. |z| = 0 ⇐⇒ z = 0
3. |zw| = |z||w|
4. |z + w| ≤ |z| + |w| (Dreiecksungleichung)
Man kann die komplexen Zahlen z = x + yi statt in kartesischen Koordinaten“
”
(x, y) auch in sog. Polarkoordinaten darstellen. Dazu betrachten wir den Winkel
θ, den der Vektor (a, b) ∈ R2 mit der x-Achse einschließt. Er wird mit arg(z)
bezeichnet (Argument von z).
Im
"
#
y
θ
|z |
x + yi = z
θ = arg(z)
!
x
Aus der Zeichnung liest man ab
cos θ =
x
y
, sin θ =
.
|z|
|z|
Re
c Rudolf Scharlau
!
50 Lineare Algebra I — 2005–2009
Satz 1.5.9 (Polarkoordinaten-Darstellung komplexer Zahlen)
a) Jede komplexe Zahl z 3= 0 kann eindeutig geschrieben werden als
z = r · (cos θ + i sin θ) mit r ∈ R, θ ∈ [0, 2π[.
Dabei ist r = |z|, und θ entspricht dem Winkel zwischen z und der reellen
Achse. Die Zahlen (r, θ) heißen Polarkoordinaten von z.
b) Für die Multiplikation komplexer Zahlen gilt
z · z ! = rr ! · (cos(θ + θ! ) + i sin(θ + θ! )
D.h. die Beträge der beiden komplexen Zahlen werden multipliziert und die
Winkel addiert.
"
'
Im
z · z!
&!
z
θ + θ!
%
z
θ!
θ
!
Re
Die Formel unter b) für das Produkt beweist man durch einfaches Nachrechnen
mittels der Additionstheoreme für Cosinus und Sinus.
√
√
Beispiel. Wir betrachten die komplexe Zahl ω = 12 + 21 −3 = 12 + 21 3 · i. Mit
etwas Rechnung zeigt man ω 3 = −1, ω 6 = 1. √Mit Polarkoordinaten geht dieses
ohne Rechnung: es ist |ω| = 1 und 12 = cos π3 , 23 = sin π3 , also
ω = cos
π
π
+ i sin .
3
3
Also ist ω 3 = cos π + i sin π = −1, ω 6 = cos 2π + i sin 2π = 1.
c Rudolf Scharlau
!
Lineare Algebra I — 2005–2009
Im
"
( ω=
1
2
π
3
−1
+i
√
3
2
!
Re
− π3
)
51
ω=
1
2
−i
√
3
2
Die Darstellung in den Polarkoordinaten θ = arg(z) und |z| lässt sich einprägsamer schreiben mit Hilfe der komplexen Exponentialfunktion. Die Herleitung der
entsprechenden Formel wollen wir im folgenden kurz skizzieren.
Aus der Analysis sind die Reihenentwicklungen der Exponentialfunktion, des Sinus und des Cosinus bekannt: für beliebige reelle x gilt
∞
(
1 n
x
e
=
n!
n=0
∞
(
(−1)n 2n
cos x =
x
(2n)!
n=0
∞
(
(−1)n 2n+1
x
sin x =
(2n
+
1)!
n=0
x
Diese Reihen kann man sich übrigens leicht als Taylorreihen herleiten. Für zwei
beliebige komplexe Zahlen z, w ∈ C kann man aufgrund der in Satz 1.5.8 festgestellten Eigenschaften die Zahl |z − w| sinnvoll als den Abstand der Elemente z
und w in C interpretieren (siehe auch 2.9.16); hiermit kann man die Konvergenz
von Folgen und den Grenzwert-Begriff für Funktionen (und weiter auch Stetigkeit
und Differenzierbarkeit) wie im Reellen definieren. Man kann dann zeigen, dass
Reihen für die Exponentialfunktion, für Cosinus und für Sinus auch für komplexe
Argumente konvergieren. Wie im Reellen konvergieren sie sogar absolut, und als
Konsequenz ist es erlaubt, die Reihenglieder beliebig umzuordnen. Wenn man in
die Exponentialreihe speziell eine rein imaginäre Zahl x = it mit t ∈ R einsetzt
und dann die Reihe so umordnet, dass Real- und Imaginärteil getrennt werden,
erhält man den folgenden Satz.
c Rudolf Scharlau
!
52 Lineare Algebra I — 2005–2009
Satz 1.5.10 (Eulersche Formel) Für jedes t ∈ R gilt
eit = cos t + i · sin t.
Die Polarkoordinaten-Darstellung z = r · (cos θ + i · sin θ) kann man daher auch
schreiben als
z = r eiθ = |z|ei arg(z) für beliebiges z ∈ C.
!
Die Formel für das Produkt z · z ! = rr ! ei(θ+θ ) benötigt nun nicht mehr die Additionstheoreme für Cosinus und Sinus, sondern einfach die Funktionalgleichung
eu+v = eu · ev der Exponentialfunktion, die für beliebiges u, v ∈ C gilt. In der Tat
kann man die Additionstheoreme, wenn man sie einmal vergessen hat, jederzeit
!
!
aus der Funktionalgleichung ei(θ+θ ) = eiθ · eiθ und der Formel von Euler wieder
herleiten.
Wir hatten die komplexen Zahlen durch die Forderung eingeführt, dass sich aus
−1 die Quadratwurzel ziehen lässt. Tatsächlich gilt sehr viel mehr, wie sich mit
der Polarkoordinaten-Darstellung besonders einfach zeigen läßt:
Satz 1.5.11
a) Jede komplexe
√
√Zahl a = r · (cos θ + i sin θ) besitzt eine Quadratwurzel, nämlich a := r · (cos 2θ + i sin 2θ ).
b) Allgemeiner besitzt a für jedes n ∈ N n-te Wurzeln, also Zahlen c ∈ C mit
cn = a. Dieses sind die Zahlen
* )
*
)
√
θ
2kπ
2kπ
θ
n
· cos
+ i · sin
, k = 0, 1, . . . , n−1.
ck := r · cos + i sin
n
n
n
n
Die Zahlen
ωnk := cos
2kπ
2kπ
2kπ
+ i · sin
= ei n ,
n
n
k = 0, 1, . . . , n − 1
heißen auch n-te Einheitswurzeln. Sie sind die Lösungen der Gleichung z n = 1.
In der Tat gilt mit ωn := ωn1 , dass ωnk wirklich die k-te Potenz (ωn )k ist.
In Wirklichkeit gilt in C noch viel mehr als nur die Existenz von Wurzeln: jede
Gleichung n-ten Grades
an xn + an−1 xn−1 + . . . + a1 x + a0 = 0 mit ak ∈ C, an 3= 0
besitzt in C wenigstens eine Lösung. Anders ausgedrückt, jedes nicht-konstante
Polynom mit komplexen Koeffizienten besitzt wenigstens eine Nullstelle. Wenn
man die Lösungen, bzw. Nullstellen mit geeigneten Vielfachheiten versieht, so besitzt die Gleichung sogar n Lösungen. Die genaue Formulierung des Sachverhaltes
geben wir im folgenden Satz.
Lineare Algebra I — 2005–2009
c Rudolf Scharlau
!
53
Theorem 1.5.12 (Fundamentalsatz der Algebra) Jedes Polynom
f (z) = an z n + an−1 z n−1 + . . . + a1 z + a0
mit komplexen Koeffizienten aj und an 3= 0 besitzt eine Darstellung
f (z) = an (z − c1 )(z − c2 ) · · · (z − cn )
mit n komplexen Zahlen c1 , . . . , cn .
Für diesen Satz gibt es unterschiedliche Beweise, die aber alle recht kompliziert
und voraussetzungsreich sind und den Rahmen dieser Vorlesung sprengen würden.
Der Satz 1.5.11 b) ist in dem Theorem natürlich enthalten: die n-ten Wurzeln
einer vorgegebenen komplexen Zahl a sind die Nullstellen des Polynoms z n − a =
0.