Elektromagnetische Feldtheorie - Technische Universität München
Werbung

Lehrstuhl für Technische Elektrophysik
Technische Universität München
Elektromagnetische Feldtheorie
Vorlesungsskript
Prof. Dr. G. Wachutka
29. November 2011
Inhaltsverzeichnis
3
Inhaltsverzeichnis
1 Klassische Kontinuumstheorie des Elektromagnetismus
1.1 Maxwellsche Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Energie von elektromagnetischen Feldern . . . . . . . . . . . . . . . . . .
1.2.1 Elektrische Energiedichte . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Magnetische Energiedichte . . . . . . . . . . . . . . . . . . . . . .
1.2.3 Allgemeine Bilanzgleichung . . . . . . . . . . . . . . . . . . . . .
1.2.4 Energiebilanz des elektromagnetischen Feldes . . . . . . . . . . .
1.3 Potentialdarstellung des elektromagnetischen Feldes . . . . . . . . . . . .
1.3.1 Elektromagnetisches Vektor- und Skalarpotential . . . . . . . . .
1.3.2 Maxwellsche Gleichungen in Potentialdarstellung . . . . . . . . .
1.4 Feldverhalten an Materialgrenzen . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Grenzflächenbedingung für die normalen Feldkomponenten . . . .
1.4.2 Grenzflächenbedingungen für die tangentialen Feldkomponenten .
1.5 Das Randwertproblem der Potentialtheorie . . . . . . . . . . . . . . . . .
1.5.1 Das RWP der Elektrostatik . . . . . . . . . . . . . . . . . . . . .
1.5.2 Klassifikation der Potential-Randwertprobleme . . . . . . . . . . .
1.5.2.1 Dirichletsches Randwertproblem . . . . . . . . . . . . .
1.5.2.2 Neumannsches Randwertproblem . . . . . . . . . . . . .
1.5.2.3 Gemischtes Randwertproblem . . . . . . . . . . . . . . .
1.5.3 Analytische Lösungsverfahren für die Poissongleichung . . . . . .
1.5.3.1 Orthogonalentwicklung nach Eigenfunktionen des LaplaceOperators . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.3.2 Lösung mittels Greenfunktion . . . . . . . . . . . . . . .
1.5.3.3 Konstruktion der Greenfunktion mit Hilfe der Spiegelladungsmethode . . . . . . . . . . . . . . . . . . . . . . .
1.5.4 Stationäre Stromverteilung . . . . . . . . . . . . . . . . . . . . . .
1.5.4.1 Bilanz- und Transportgleichungen für elektrische Strömungsverteilungen . . . . . . . . . . . . . . . . . . . . .
1.5.4.2 Stationäre Strömungsfelder im Drift-Diffusions-Modell .
1.5.4.3 Stationäre Strömungsfelder im Ohmschen Transportmodell
1.5.4.4 Randwertproblem für stationäre Ohmsche Strömungsfelder
1.5.5 Korrespondenz . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Modellierung elektromagnetischer Vorgänge in technischen Systemen
Kompaktmodellen
2.1 Flusserhaltende Diskretisierung mit Kirchhoffschen Netzwerken . . . .
2.1.1 Generelle Modellannahmen . . . . . . . . . . . . . . . . . . . .
2.1.2 Feldtheoretische Beschreibung der Quasistationarität . . . . .
7
7
9
9
12
16
19
21
21
23
26
26
29
33
33
37
37
38
40
44
44
47
50
55
55
57
57
58
59
mit
63
. . 63
. . 63
. . 64
4
Inhaltsverzeichnis
2.1.3
Synthese von Netzwerkmodellen aus funktionalen Blöcken . . . . 65
2.1.3.1 Funktionale Blöcke . . . . . . . . . . . . . . . . . . . . . 65
2.1.3.2 Erstellung eines Kirchhoffschen Netzwerkes . . . . . . . 67
2.1.3.3 Kirchhoffsche Knotenregel . . . . . . . . . . . . . . . . . 69
2.1.3.4 Kirchhoffsche Maschenregel . . . . . . . . . . . . . . . . 70
2.2 Kapazitive Speicherelemente . . . . . . . . . . . . . . . . . . . . . . . . . 71
2.2.1 Kondensatoranordnungen (Geometrie und Randwertproblem) . . 71
2.2.2 Maxwellsche Kapazitätsmatrix . . . . . . . . . . . . . . . . . . . . 73
2.2.2.1 Beziehung zwischen Elektrodenladungen und -potentialen 73
2.2.2.2 Darstellung der gespeicherten elektrischen Energie . . . 74
2.2.2.3 Teilkapazitätskoeffizienten . . . . . . . . . . . . . . . . . 79
2.3 Induktive Speicherelemente . . . . . . . . . . . . . . . . . . . . . . . . . 80
2.3.1 Spulenanordnungen (Geometrie und Topologie) . . . . . . . . . . 80
2.3.2 Induktionskoeffizienten . . . . . . . . . . . . . . . . . . . . . . . . 82
2.3.3 Zusammenhang mit der magnetischen Feldenergie . . . . . . . . . 85
2.4 Niederfrequente Wechselstromnetzwerke . . . . . . . . . . . . . . . . . . 88
2.4.1 Grundlegende Begriffe der Wechselstromlehre . . . . . . . . . . . 89
2.4.1.1 Wechselspannungsgenerator . . . . . . . . . . . . . . . . 89
2.4.1.2 Zeigerdarstellung . . . . . . . . . . . . . . . . . . . . . . 91
2.4.2 Wechselstromschaltungen mit linearen Bauelementen . . . . . . . 96
2.4.2.1 Lineare Wechselstrom-Bauelemente . . . . . . . . . . . . 96
2.4.2.2 Elementare Beispiele für lineare Wechselstrombauelemente 97
2.4.2.3 Kirchhoffsche Regeln für Wechselstromschaltungen . . . 102
2.4.2.4 Einfache Grundschaltungen aus R, L, C . . . . . . . . . 103
2.4.2.5 Zusammenfassung zur Wechselstromrechnung . . . . . . 109
2.4.3 Leistung und Effektivwerte . . . . . . . . . . . . . . . . . . . . . . 110
2.4.3.1 Momentane Leistung . . . . . . . . . . . . . . . . . . . . 110
2.4.3.2 Effektivwerte, Wirkleistung . . . . . . . . . . . . . . . . 111
2.4.3.3 Leistungsbilanz bei energiespeichernden Bauelementen . 114
2.4.3.4 Scheinleistung und Blindleistung . . . . . . . . . . . . . 117
3 Elektromagnetische Wellen in homogenen Medien
121
3.1 Grundlegende Aspekte . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
3.1.1 Modellannahmen . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
3.1.2 Differentialgleichungen für Wellen . . . . . . . . . . . . . . . . . . 122
3.1.3 Wellengleichung für das elektromagnetische Viererpotential . . . . 124
3.1.4 Physikalischer Mechanismus für die elektromagnetische Wellenausbreitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
3.2 Homogene Wellengleichung in einer Raumdimension . . . . . . . . . . . . 126
3.2.1 Vereinfachende Modellannahmen . . . . . . . . . . . . . . . . . . 126
3.2.2 Grundlösungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
3.3 Ebene Wellen im dreidimensionalen Raum . . . . . . . . . . . . . . . . . 130
3.3.1 Grundlösungen der vektoriellen Wellengleichung in R3 . . . . . . . 130
3.3.2 Ebene elektromagnetische Wellen . . . . . . . . . . . . . . . . . . 133
3.3.3 Energiedichte und Leistungsfluss ebener EM-Wellen . . . . . . . . 135
3.3.4 Harmonische ebene elektromagnetische Wellen im 3D-Raum . . . 137
3.3.4.1 Linear polarisierte harmonische elektromagnetische Wellen137
Inhaltsverzeichnis
3.3.4.2
3.3.5
3.3.6
3.3.7
5
Elliptisch polarisierte harmonische elektromagnetische Wellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
3.3.4.3 Komplexe Darstellung harmonischer elektromagnetischer
Wellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Darstellung beliebiger EM-Wellen durch harmonische ebene Wellen 141
Grundgleichungen in Fourierdarstellung . . . . . . . . . . . . . . . 142
Räumlich gedämpfte ebene elektromagnetische Wellen in Leitern . 146
7
1 Klassische Kontinuumstheorie des
Elektromagnetismus in materiellen
Medien
1.1 Maxwellsche Gleichungen
Die Grundgleichungen des Elektromagnetismus lassen sich in einem konsistenten System partieller Differentialgleichungen zusammenfassen. Diese werden als „Maxwellsche
Gleichungen“ bezeichnet und lauten:
=ρ
div D
(1.1)
= − ∂B
rot E
∂t
(1.2)
=0
div B
(1.3)
= j +
rot H
∂D
∂t
(1.4)
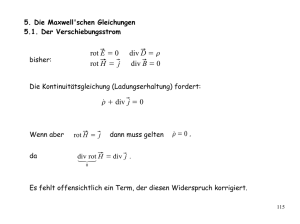
Die Maxwellschen Gleichungen beschreiben Naturgesetze, die folgende physikalische
Aussagen beinhalten:
• Elektrische Felder werden erzeugt
– von einer elektrischen Ladungsverteilung ρ
(quasi-statisch, Gl. (1.1))
– oder durch ein schnell zeitveränderliches Magnetfeld
(magnetische Induktion, Gl. (1.2))
∂B
∂t
8
1.1 Maxwellsche Gleichungen
• Magnetische Felder werden erzeugt
– durch eine elektrische Stromverteilung j
(quasi-statisch, Gl. (1.4))
– oder durch ein schnell zeitveränderliches elektrisches Feld
(Verschiebungsstrom =
ˆ „elektrische Induktion“, Gl.(1.4))
∂D
∂t
• Durch das Faradaysche Induktionsgesetz (1.2) und das Ampère-Maxwellsche Gesetz (1.4) werden das elektrische Feld und das magnetische Feld in ihrer Zeit und H
als
und Ortsabhängigkeit eng miteinander verkoppelt. Man fasst daher E
,H
) auf, die
die beiden Komponenten einer einzigen physikalischen Feldgröße (E
als „elektromagnetisches Feld“ bezeichnet wird. Nur im Falle rein statischer
∂D
∂B
= 0 und
= 0 gilt, sind die „elektrische Welt“ und die „maFelder, wenn
∂t
∂t
gnetische Welt“ entkoppelt, und nur dann macht es Sinn, das elektrische und das
magnetische Feld als unabhängige Feldgrößen zu behandeln.
Damit die Maxwellschen Gleichungen ein geschlossenes Differentialgleichungssystem für
, H
) ergeben, müssen sie noch um die sogenannten
das elektromagnetische Feld (E
Materialgleichungen ergänzt werden. In ihrer einfachsten Forn lauten diese:
= E
D
(1.5)
= μH
B
(1.6)
j = σ E
(1.7)
Diese Gleichungen sind keine Naturgesetze, sondern phänomenologische Modellgleichungen mit einem beschränkten Gültigkeitsbereich, der sich aus den zugrundeliegenden Modellannahmen ergibt (elektrisches Polarisationsmodell, Magnetisierungsmodell,
Ohmsches Driftmodell usw.)
Das System (1.1) - (1.7) ist auf einem Gebiet Ω ⊂ E3 zu lösen. Nach entsprechender
,H
.
Substitution und Elimination ergibt sich ein geschlossenes System für E
Nach Vorgabe von passend gewählten Randwerten auf ∂Ω und Anfangsbedingungen für
t = t0 sind hierdurch alle elektromagnetischen Vorgänge vollständig bestimmt.
9
1.2 Energie von elektromagnetischen Feldern
1.2.1 Elektrische Energiedichte
(i) Die elektrische Energie Wel , die im elektrischen Feld einer diskreten Ladungsverteilung (qi , r i )i=1, ..., N gespeichert ist, ist gleich der elektrischen Arbeit, die
zum Aufbau dieser Ladungsverteilung geleistet werden muss, indem die Ladungen
q1 , q2 , . . . , qN sukzessive aus dem Unendlichen an ihre Positionen r 1 , r 2 , . . . , r N
gebracht werden. Um die k-te Ladung qk im elektrischen Feld der bereits in Position gebrachten Ladungen q1 , . . . , qk−1 an die Stelle rk zu bewegen, muss die
Arbeit
qi
1 k−1
(k)
ΔWel = qk ·
4π i=1 |r k − r i |
geleistet werden. Für die gesamte Arbeit ergibt sich dann:
Wel =
N
k=2
(k)
ΔWel =
N
i<k
i,k=1
N
1
qk qi
1 1 qk qi
=
4π |r k − r i |
2 4π i=k |r k − r i |
(1.8)
i,k=1
(ii) Die elektrische Energie, die im elektrischen Feld einer kontinuierlichen Ladungsverteilung ρ(r ) gespeichert ist, lässt sich aus Gl. (1.8) dadurch ableiten, dass man
ρ(r ) durch eine quasikontinuierliche, diskrete Ladungsverteilung (qi , r i )i=1, ..., N
approximiert, welche für N → ∞ gegen ρ(r ) konvergiert:
→
(qi , r i )i=1, ..., N
ρ(r )
Hierbei wird qi um einen Punkt ri so „verschmiert“, dass die im Volumen d3 r um
den Punkt ri enthaltene Ladung dQi (r) gleich qi ist:
qi = dQi (ri ) = ρ(ri ) d3 r
Hieraus ergibt sich für N → ∞ die folgende Substitutionsregel:
N
{. . . , r i , . . .} qi
→
i=1
{. . . , r , . . .} ρ(r ) d3 r
V
wobei das Gebiet V ⊂ E3 so gewählt wird, dass ρ(r ) außerhalb von V verschwindet.
Angewandt auf die Doppelsumme in Gl. (1.8) ergibt sich damit das Doppelintegral
1 ρ(r )ρ(r ) 3 3 d rd r
Wel =
8π
|r − r |
(1.9)
V V
(iii) Die elektrische Energie wird nach Gl. (1.9) als Funktional der Feldquellen ρ(r)
dargestellt, also Wel = Wel [ρ]. Wir wollen Wel nun direkt durch die Feldgrößen
(r ) und D
(r ) selbst ausdrücken, was zunächst nur in differentieller Form gelingt.
E
10
1.2 Energie von elektromagnetischen Feldern
Einer kleinen Änderung der felderzeugenden Ladungsdichte
ρ(r ) → ρ(r ) + δρ(r )
entspricht eine kleine Änderung δWel [ρ, δρ] der Feldenergie, die bezüglich δρ linear
approximiert werden kann. Hierzu betrachtet man
F (α) := Wel [ρ + αδρ]
für α ∈ R
und definiert die 1. Variation von Wel bezüglich δρ als
d
δWel [ρ, δρ] :=
Wel [ρ + αδρ]
dα
α=0
(1.10)
Damit gilt:
dF Wel [ρ + δρ] = F (1) = F (0) +
· 1 + O δρ2
dα α=0
d
= Wel [ρ] +
+ O δρ2
Wel [ρ + αδρ]
dα
α=0
= Wel [ρ] + δWel [ρ; δρ] + O δρ2
Die explizite Berechnung der differentiellen Änderung der elektrischen Feldenergie
ergibt:
⎞
⎛
d ⎝ 1 1 (ρ(r ) + αδρ(r ))(ρ(r ) + αδρ(r )) 3 3 ⎠
d rd r δWel =
dα 2 4π
|r − r |
V V
1 1
=
2 4π
d
dα
V V
(ρ(r ) + αδρ(r ))(ρ(r ) + αδρ(r ))
|r − r |
α=0
d3 r d3 r
α=0
1 1 ρ(r ) δρ(r ) δρ(r ) ρ(r )
=
d3 r d3 r
+
2 4π
|r − r |
|r − r |
V V
=
V
⎛
1
⎝
4π
V
⎞
ρ(r ) 3 ⎠
δρ(r ) d3 r =
dr
|r − r |
Φ(r ) δρ(r ) d3 r
V
elektrostatisches Potential Φ(r )
Hierbei ist Φ(r ) das von der Ladungsverteilung ρ(r ) erzeugte Coulomb-Potential.
Die differentielle Änderung von Wel lautet also
δWel =
V
Φ(r ) δρ(r ) d3 r
(1.11)
1.2.1 Elektrische Energiedichte
11
bzw. D
ausdrücken:
(iv) Nun können wir δWel durch die Feldgrößen E
gemäß
• δρ verursacht nach dem Gaußschen Gesetz eine Änderung δ D
div δ D = δρ.
genügt E
= −∇Φ.
• E
• δρ sei eingeschlossen in einer Kugel K(0 , R).
Damit folgt:
(r ) d3 r
Φ(r ) div δ D
δWel =
K(0 ,R)
=−
K(0 ,R)
(r ) d3 r +
grad Φ(r ) · δ D
−E(r )
∂K(0 ,R)
(r ) da
Φ(r ) δ D
∼
1
1 ∼ R2
∼ 2
R
R
Für R → ∞ erhält man damit:
δWel =
· δD
d3 r
E
(1.12)
R3
(v) Dieses Ergebnis lässt sich folgendermaßen interpretieren:
Wir nehmen an, das elektrische Feld trägt eine Energiedichte wel (r ) mit sich, aus
der sich die gesamte Feldenergie durch Integration berechnen lässt:
Wel =
wel (r ) d3 r
R3
Für die 1. Variation folgt dann:
δWel =
δwel (r ) d3 r
R3
→
(D
). Dann ergibt sich
Nehmen wir weiter an, es gebe ein Materialgesetz D
E
durch Vergleich mit Gl. (1.12):
· δD
δwel = E
(1.13)
12
1.2 Energie von elektromagnetischen Feldern
ist die lokale differentielle Änderung der Energiedichte des elektrischen Feldes und
D
wel =
0
(D
) · dD
E
(1.14)
-D
-Raum
Wegintegral im E
ist die (lokale) Energiedichte des elektrischen Feldes.
= E
, = const., ergibt sich durch
(vi) Im Falle eines streng linearen Dielektrikums D
Integration
D
wel =
0
⎡
1 1⎢
D · dD = ⎣
=
Dx
0
Dx dDx +
Dy
Dy dDy +
0
Dz
⎤
⎥
Dz dDz ⎦
0
1
(D2 + Dy2 + Dz2 )
2 x
das einfache Ergebnis
wel =
1 2
2 1 = E ·D
D = E
2
2
2
(1.15)
1.2.2 Magnetische Energiedichte
(i) Die magnetische Energie Wmag , die im Magnetfeld einer Stromverteilung gespei
∂D
chert ist, kann wegen des Verschiebungsstroms
im Ampèreschen Gesetz (1.4)
∂t
-Feld betrachtet werden. Wir
nicht entkoppelt von der elektrischen Energie im D
leiten daher die magnetische Energiedichte aus einer Leistungsbilanz für das gekop ,H
) her. Ausgangspunkt ist die externe Leistung,
pelte elektromagnetische Feld (E
die dem elektromagnetischen System zugeführt werden muss, um eine Stromverteilung aufzubauen und aufrechtzuerhalten.
(ii) Wir betrachten zunächst diskrete Ladungen qk , die sich auf Bahnkurven rk (t) mit
der Geschwindigkeit v k (t) bewegen. Die zugeführte Leistung wird einer mechanischen Energiequelle entnommen, die die Ladungen im elektromagnetischen Feld
1.2.2 Magnetische Energiedichte
13
bewegt. Die Zufuhr an elektromagnetischer Leistung beträgt:
Pelmag = −
=−
N
k=1
N
F k (r k ) · v k
qk
(r k )+ v k × B
(r k ) · v k
E
k=1
=−
N
0
(r k ) (= − mechanische Leistung)
qk vk · E
(1.16)
k=1
(iii) Im Falle einer kontinuierlichen Stromverteilung j (r ) = ρ(r )v (r ) benutzen wir
wieder die Substitutionsregel
N
{. . . , r k , . . .} qk
→
k=1
{. . . , r , . . .} ρ(r ) d3 r
V
und erhalten aus Gl. (1.16)
Pelmag = −
(r ) d3 r
ρ(r )v (r ) · E
V
woraus folgt:
Pelmag = −
(r ) d3 r
j (r ) · E
(1.17)
V
Bemerkung: Ist die Stromverteilung aus verschiedenen Trägersorten zusammengesetzt, ergibt sich dasselbe Ergebnis.
= j + ∂ D kann nun j aus Gl. (1.17) eli(iv) Mit Hilfe des Ampèreschen Gesetzes rot H
∂t
/B
und E
/D
dargestellt
miniert werden und Pelmag allein durch die Feldgrößen H
werden:
3
· ∂ D d3 r
Pelmag = − rot H · E d r +
(1.18)
E
∂t
V
V
V
dWel
∂wel 3
dr=
∂t
dt
dWel
ist die Änderung des rein elektrischen Energieinhalts. Demnach muss die zu
dt
dWmag
enthalten sein
bestimmende Änderung des magnetischen Energieinhalts
dt
14
1.2 Energie von elektromagnetischen Feldern
im Term:
−
!
·E
d3 r =
rot H
V
V
∂wmag 3
d r + Energiefluss aus System durch Berandung ∂V
∂t
dWmag
dt
Für die weitere Umformung benötigen wir die Beziehung
×H
) = ∇ · (E
×H
)
div(E
)·H
− (∇ × H
)·E
= (∇ × E
=−
∂B
− rot H
·E
·H
∂t
= − ∂ B benutzt wird.
wobei das Induktionsgesetz rot E
∂t
Damit folgt unter Verwendung des Gaußschen Integralsatzes:
−
·E
d3 r =
rot H
V
V
=
V
∂B
3
×H
) d3 r
· H d r + div(E
∂t
V
· ∂ B d3 r +
×H
da
H
E
∂t
∂V
Wählt man für das Gebiet V eine Kugel K(0 , R) um den Ursprung mit Radius R
und lässt R → ∞ gehen, so lässt sich mit Gl. (1.18) die zugeführte elektromagnetische Leistung Pelmag als Summe von drei Termen darstellen:
Pelmag
∂D
3
d r+
= E·
∂t 3
R
R3
∂wel
∂t
dWel
dt
∂B
3
×H
) · da
d r + lim
H ·
(E
R→∞
∂t
|
r |=R
∂wmag
∂t
dWmag
dt
(1.19)
Der erste Term ist nach Gl. (1.12) die Zeitableitung der elektrischen Feldenergie
dWel
, der analog dazu gebildete zweite Term ist als zeitliche Änderung der gedt
dWmag
zu interpretieren, und der dritte Term
suchten magnetischen Feldenergie
dt
beschreibt den Leistungsfluss durch die Kugeloberfläche ∂K(0 , R) nach außen (vgl.
Abs. 1.2.4) im Limes R → ∞. Er lässt sich folgendermaßen abschätzen:
1.2.2 Magnetische Energiedichte
15
Für lokalisierte Ladungen und Ströme gilt für das asymptotische Verhalten der
erzeugten Felder
| ∼ 1 und |H
|∼ 1
|E
Rn
Rm
mit n = 2 und m = 3 im quasistatischen Fall und n = m = 1 im dynamischen Fall
(Wellenausbreitung, siehe Kap. 3). Die Oberfläche von ∂K(0 , R) wächst mit R2 ;
daher folgt
lim
R→∞
|
r |=R
×H
E
⎧
⎪
⎪
⎪
0 (quasistatischer Fall)
⎪
⎪
⎨
da =
⎪
⎪
⎪
⎪
⎪
⎩
total abgestrahlte Leistung (dynamischer Fall)
(v) Aus Gl. (1.19) lassen sich damit folgende Schlüsse ziehen:
Die differentielle Änderung der gesamten magnetischen Feldenergie beträgt
δWmag =
(r ) · δ B
(r ) d3 r
H
(1.20)
R3
Die differentielle Änderung der Energiedichte des magnetischen Feldes ist
· δB
δwmag = H
(1.21)
woraus sich die Energiedichte des magnetischen Feldes ergibt als
B
wmag =
0
(B
) · dB
H
(1.22)
-B
-Raum
Wegintegral im H
= μH
; μ = const.,
(vi) Im Falle eines streng linearen magnetisierbaren Materials mit B
ergibt sich durch Integration
H
wmag = μ
0
· dH
=μH
2=1H
·B
= 1B
2
H
2
2
2μ
(1.23)
16
1.2 Energie von elektromagnetischen Feldern
1.2.3 Allgemeine Bilanzgleichung
(i) Viele Gesetze der Physik lassen sich als Bilanzgleichung für eine extensive physikalische Größe X formulieren. Dies ist eine Größe, die eine Volumendichte
x(r , t) dergestalt besitzt, dass zu jedem beliebigen räumlichen Gebiet V ⊂ E3
(Kontrollvolumen) der in V enthaltene Mengeninhalt X(V ) als Integral
X(V ) =
x(r , t) d3 r
V
bestimmt werden kann.
Beispiele für extensive Größen sind
Größe
X
Volumendichte x
Ladung
Q
Ladungsdichte
ρel
Masse
M
Massendichte
ρM
Teilchenzahl N
Konzentration
n
Energie
Energiedichte
w(el,mag)
W(el,mag)
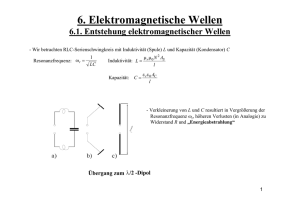
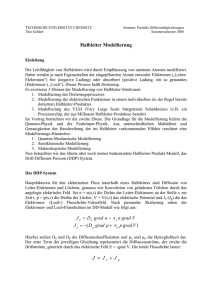
(ii) Die extensive Größe X besitze eine Stromdichte J X (r , t). Diese hat die Eigen da
schaft, dass für eine gegebene differentielle, orientierte Kontrollfläche da = N
das Skalarprodukt J X · da diejenige Menge der Größe X angibt, die pro Zeiteinheit die Kontrollfläche in Normalenrichtung passiert.
Die aus einem Kontrollvolumen V durch seine geschlossene Oberfläche ∂V pro
Zeiteinheit nach
außen strömende Menge der Größe X ist dann gegeben durch das
Flussintegral J X · da .
∂V
r
da
r
JX
V
r r
da = N da
¶V
r
JX
Abbildung 1.1: Fluss der extensiven Größe X durch ein Kontrollvolumen
1.2.3 Allgemeine Bilanzgleichung
17
(iii) Die extensive Größe X besitze eine Produktionsrate ΠX (r , t), die angibt, welche
Menge der Größe X pro Volumeneinheit und Zeiteinheit erzeugt oder vernichtet
wird. ΠX > 0 bedeutet Erzeugung, ΠX < 0 bedeutet Vernichtung von X.
(iv) Die im Volumen V enthaltene Menge X(V ) kann sich nur dadurch ändern, dass
entweder ein Zufluss (oder Abfluss) durch die Hüllfläche ∂V erfolgt, oder dass
innerhalb von V eine Erzeugung (oder Vernichtung) stattfindet.
Damit gilt die Bilanzgleichung in integraler Form
dX(V )
= − J X da + ΠX d3 r
dt
(1.24)
V
∂V
Das negative Vorzeichen beim Flussintegral kommt daher, dass
J X · da > 0
∂V
einen Netto-Abfluss bezeichnet, was einer Abnahme von X(V ) entspricht.
(v) Die zeitliche Änderung von X(V ) lässt sich durch die Volumendichte x(r , t) ausdrücken:
∂x
d dX(V )
x(r , t) d3 r =
=
(r , t) d3 r
dt
dt
∂t
V
V
Eingesetzt in die integrale Bilanzgleichung (1.24) und unter Anwendung das Gaußschen Integralsatzes auf das Flussintegral ergibt sich:
V
∂x
(r , t) d3 r = −
∂t
div J X (r , t) d3 r +
V
ΠX (r , t) d3 r
V
für jedes beliebige Kontrollvolumen V .
Damit folgt die allgemeine Bilanzgleichung in differentieller Form:
∂x
= − div J X + ΠX
∂t
(1.25)
(vi) Wichtige Beispiele für Bilanzgleichungen im Bereich der Elektrodynamik sind:
• Ladungserhaltung:
Mit (1.1) und (1.4) gilt:
) = div j +
0 ≡ div(rot H
∂D
∂ρ
= div j +
∂t
∂t ∂
= ∂ρ
div D
∂t
∂t
div
18
1.2 Energie von elektromagnetischen Feldern
Daraus folgt die Ladungserhaltungsgleichung (oder Ladungskontinuitätsgleichung):
∂ρ
0 = div j +
∂t
Die Ladungsgenerationsrate ΠQ verschwindet (ΠQ ≡ 0), weil elektrische Ladungen weder erzeugt noch vernichtet werden können.
• Teilchenbilanz im Halbleiter:
Bezeichnen n und p die Teilchendichten der beweglichen Elektronen und Löcher in einem Halbleiter und Jn und Jp die zugehörigen Teilchenstromdichten,
so gilt:
Elektronen:
∂n
= − div J n + Gn
∂t
Löcher:
∂p
= − div J p + Gp
∂t
Die Teilchen-Generations-Rekombinationsraten Gn und Gp sind im allgemeinen nicht Null, weil durch Elektron-Loch-Paarbildung bzw. Rekombination
die Zahl der beweglichen Ladungsträger verändert werden kann. Die Ladungserhaltung wird hierdurch nicht verletzt.
• Energiebilanz für das elektromagnetische Feld
Bezeichnet welmag = wel + wmag die Energiedichte des elektromagnetischen
Feldes, J elmag die zugehörige Leistungsflussdichte und Πelmag die dem Feld
zugeführte Leistungsdichte, so gilt
∂welmag
+ div J elmag = Πelmag
∂t
(1.26)
Im nächsten Abschnitt sollen nun die einzelnen Terme dieser Bilanzgleichung
konkret identifiziert und durch die Feldgrößen ausgedrückt werden.
1.2.4 Energiebilanz des elektromagnetischen Feldes
19
1.2.4 Energiebilanz des elektromagnetischen Feldes,
Poynting-Vektor
(i) Die zeitliche Änderung der elektrischen und magnetischen Energiedichte ist nach
Gl. (1.13) und (1.21) gegeben als:
∂wel
· ∂D
=E
∂t
∂t
und
∂wmag
· ∂B
=H
∂t
∂t
(1.27)
Damit können wir wegen welmag = wel + wmag den ersten Term in der Energiebilanz
/D
und H
/B
ausdrücken. Desweiteren ist nach Gl. (1.17) die dem
(1.26) durch E
elektromagnetischen Feld zugeführte Gesamtleistung
Pelmag = −
d3 r
j · E
V
woraus sich für die zugeführte Leistungsdichte ergibt:
Πelmag = −j · E
(1.28)
(meist tatsächlich negativ, wenn das elektromagnetische Feld in einem Leiter die
> 0 abgibt)
Verlustleistungsdichte j · E
Damit lautet die Energiebilanz des elektromagnetischen Feldes (1.26) nunmehr in
konkreter Form:
· ∂ B + div J elmag = −j · E
· ∂D + H
E
∂t
∂t
∂wel
∂wmag
∂t
∂t
(1.29)
(ii) Um die Leistungsflussdichte J elmag zu identifizieren, berechnen wir unter Verwendung des Induktionsgesetzes (1.2) und des Ampèreschen Gesetzes (1.4) den Ausdruck
×H
div E
·H
−E
· rot H
= −H
· ∂B − E
· ( ∂ D + j )
= rot E
∂t
∂t
Nach Umstellen der Terme erhält man:
×H
= −j · E
· ∂D + H
· ∂ B + div E
E
∂t
∂t
Πelmag
∂welmag
∂t
(1.30)
Der Vergleich mit Gl. (1.29) legt nahe, den Poynting-Vektor
:= E
×H
S
(1.31)
20
1.2 Energie von elektromagnetischen Feldern
mit der elektromagnetischen Leistungsflussdichte zu identifizieren. Streng genom ×H
) nur folgern, dass
men kann man aber aus der Gleichheit div J elmag = div(E
bis auf ein additives quellenfreies Vektorfeld S
0 übereinstimmen:
J elmag und S
×H
+S
0
J elmag = E
0=0
mit div S
(1.32)
(iii) Ein illustratives Beispiel liefert der Fall, wenn ein elektrostatisches Feld (z.B.
=E
0 = const.) und ein magnetostatisches Feld (z.B. H
=H
0 = const.) von
E
unabhängigen Quellen (d.h. Ladungen und Strömen) erzeugt werden, also völlig
entkoppelt sind. Dann kann der Poynting-Vektor auf einen beliebigen konstanten
0 = 0 eingestellt werden, obwohl die Leistungsflussdichte Jelmag
=E
0 × H
Wert S
überall verschwindet.
Für die integrale und differentielle Energiebilanz ist dies allerdings völlig unerheblich, denn
∂V
· da =
S
d3 r =
div S
V
0×H
0 d3 r = 0
div E
V
für jedes Kontrollvolumen V .
=E
×H
kann dann als Leistungsflussdichte interpretiert
Der Poynting-Vektor S
und H
die miteinander gekoppelten Komponenten eines dynamiwerden, wenn E
schen elektromagnetischen Feldes bilden, das von einer dynamischen Quelle (z.B.
Sendeantenne) erzeugt wird, bei der dieselben bewegten Ladungen sowohl das E
-Feld erzeugen. Dies ist typischerweise bei elektromagnetischen
Feld als auch das H
Wellen der Fall.
21
1.3 Potentialdarstellung des elektromagnetischen Feldes
1.3.1 Elektromagnetisches Vektor- und Skalarpotential
(i) Definition und Eigenschaften des Vektorpotentials (allgemein)
(r ) besitzt ein Vek• Ein auf einem Gebiet Ω ⊂ R3 definiertes Vektorfeld U
torpotential V (r ), wenn es ein auf Ω differenzierbares Vektorfeld V (r ) gibt
mit
(r ) = rot V (r )
U
• In diesem Falle gilt:
= div(rot V ) = 0 in Ω
div U
Kurzbeweis mit Nabla-Kalkül: div(rot V ) = ∇ · ∇ × V = 0
• In „sternförmigen“ Gebieten Ω ⊂ R3 gilt auch die Umkehrung
(Satz von Poincaré):
(r ) ist stetig differenzierbar in Ω mit div U
= 0 in Ω
U
= rot V in Ω
⇒ es existiert ein Vektorpotential V (r ) auf Ω mit U
• Das Vektorpotential ist bis auf ein additives Gradientenfeld eindeutig be , so gilt:
stimmt; denn hat man zwei Vektorpotentiale V und V zu U
= rot V = rot V ⇒ rot(V − V ) = 0 in Ω
U
Folglich ist V − V ein Gradientenfeld, d.h. es existiert ein Skalarfeld χ(r )
auf Ω mit V − V = grad χ(r ).
= rot V haben die Form:
Das heißt, alle Vektorpotentiale zu U
V = V − grad χ(r )
(ii) Elektromagnetisches Vektorpotential:
Die Maxwellsche Gleichung (1.3) besagt:
(r , t) = 0
div B
in R3 × (−∞, ∞)
(1.33)
22
1.3 Potentialdarstellung des elektromagnetischen Feldes
Damit existiert nach dem Satz von Poincaré ein überall definiertes Vektorfeld
(r , t) mit:
A
(r , t) = rot A
(r , t)
B
(1.34)
heißt elektromagnetisches Vektorpotential.
A
ist durch (1.34) nur bis auf ein additives Gradientenfeld eindeutig bestimmt:
NB: A
und A
:= A
−∇
χ liefern dasselbe B
-Feld. Diese als „Eichfreiheit“ bezeichneA
te Eigenschaft wird benutzt, um das Vektorpotential zusätzliche „Eichbedingungen“
erfüllen zu lassen.
(iii) Skalares elektromagnetisches Potential:
Nach (1.2) gilt:
= − ∂B
rot E
∂t
(1.34)
= −
∂
= − rot ∂ A
rot A
∂t
∂t
+ ∂A ) = 0
⇒ rot(E
∂t
+ ∂ A ein Gradientenfeld; d.h. es existiert ein Skalarfeld Φ(r , t) mit
Damit ist E
∂t
+ ∂ A = − grad Φ
E
∂t
Damit erhält man für das elektrische Feld die Darstellung:
(r , t) = − grad Φ(r , t) − ∂ A (r , t)
E
∂t
(1.35)
Φ heißt elektromagnetisches skalares Potential.
= − grad Φ aus der ElekNB: (1.35) verallgemeinert die Potentialdarstellung E
trostatik auf den zeitabhängigen Fall. Daher wird Φ oft auch (schlampigerweise)
elektrisches Potential genannt.
(iv) Eichtransformation:
−∇
χ „umgeeicht“, so muss auch das
:= A
Wird das Vektorpotential gemäß A
skalare Potential transformiert werden, damit (1.35) gültig bleibt:
∂A
∂A
∂χ
∂A
∂
+
∇Φ +
= ∇Φ +
− ∇χ = ∇ Φ −
∂t
∂t
∂t
∂t
∂t
!
= ∇Φ +
∂A
∂t
1.3.2 Maxwellsche Gleichungen in Potentialdarstellung
23
Daher muss für Φ gelten:
Φ −
∂χ !
= Φ + (const.)
∂t
Wir erhalten damit folgenden Satz:
Die „umgeeichten“ elektromagnetischen Potentiale
(r , t) − ∇χ(r , t)
(r , t) = A
A
(1.36a)
∂χ
(r , t)
∂t
(1.36b)
Φ (r , t) = Φ(r , t) +
- und B
-Feld wie A
und Φ.
liefern für beliebige Eichfunktionen χ(r , t) dasselbe E
Beweis: In (1.34) und (1.35) einsetzen.
1.3.2 Maxwellsche Gleichungen in Potentialdarstellung
(i) Durch Einführen der elektromagnetischen Potentiale Φ, A
Maxwellgleichungen
= 0 und
div B
+
rot E
sind die homogenen
∂B
=0
∂t
aus den gegebenen Quellen, der Laidentisch erfüllt. Zur Berechnung von Φ, A
dungsverteilung ρ und der Stromdichte j , werden die inhomogenen Maxwellgleichungen (1.1) und (1.4) benutzt. Setzt man die Gültigkeit der linearen Materialgleichungen (1.5) und (1.6) voraus, so erhält man durch Einsetzen des Potentialansatzes (1.34) und (1.35) in die inhomogenen Maxwellgleichungen:
= div E
ρ = div D
= − div (∇Φ) −
− ∂ D = rot 1 rot A
j = rot H
∂t
μ
∂
div A
∂t
⎛
⎞
∂
∂ ⎝ ∂A
⎠
+
(∇Φ) +
∂t
∂t
∂t
Man hat nun ein 4-komponentiges
partielles Differentialgleichungssystem für die
Unbekannten Φ, A bei gegebenen Quellen ρ und j :
div(∇Φ) +
1
rot
rot A
μ
∂
) = −ρ
div(A
∂t
∂ 2A
∂Φ
+
+∇
2
∂t
∂t
(1.37)
= j
(1.38)
24
1.3 Potentialdarstellung des elektromagnetischen Feldes
und Φ, indem man
Ziel ist nun die Entkopplung dieser Gleichungen bezüglich A
diese zusätzlichen „Eichbedingungen“ unterwirft, die durch eine passende Wahl
der Eichfunktion χ erfüllt werden.
(ii) Lorenzeichung:
• Seien und μ (stückweise) räumlich konstant. Mit einer geeigneten Eichfunktion χ lässt sich die Lorenzeichung
+ μ
div A
∂Φ
=0
∂t
(1.39)
erfüllen.
aus (1.37) eliminieren, und man erhält für das skalare
• Damit lässt sich A
Potential Φ die Wellengleichung
ΔΦ − μ
∂ 2Φ
ρ
=−
2
∂t
(1.40)
• Um auch Gl. (1.38) zu vereinfachen, berechnen wir
=∇× ∇×A
= ∇(div A
) − ΔA
rot rot A
Weiterhin können wir mit Hilfe der Eichbedingung (1.39) die Größe
(1.38) eliminieren; man erhält so:
2
) − ΔA
+ μ ∂ A + ∇ μ ∂Φ
∇(div A
∂t2
∂t
∂Φ
aus
∂t
= j μ
)
−∇(div A
die Wellengleichung:
Daraus folgt nun auch für das Vektorpotential A
− μ
ΔA
∂2A
= −μj
∂t2
(1.41)
Man hat somit eine vollständige Entkoppelung
der Bestimmungsgleichungen
für die elektromagnetischen Potentiale Φ, A erreicht, die nun beide der
strukturell gleichen Differentialgleichung genügen. Dies spiegelt sich in fol-
1.3.2 Maxwellsche Gleichungen in Potentialdarstellung
25
dender Kompaktschreibweise wieder:
⎛
⎞
⎛
⎞
2
∂
⎜Φ⎟
⎜ρ/⎟
) ⎝ ⎠ = −⎝ ⎠
2
A
μj
∂t Wellenoperator
(Δ − μ
(1.42)
• Drückt man in einem kartesischen Koordinatensystem das Vektorpotential A
T
durch seine kartesischen Komponenten (A1 , A2 , A3 ) aus, so kann man die
√
vierkomponentige Größe (Φ/c, A1 , A2 , A3 )T (mit c := 1/ εμ) bilden („Viererpotential“).
Zudem kann man ρ und j zu einer „Viererstromdichte“ (ρc, j1 , j2 , j3 )T zusammenfassen. Alle vier Komponenten des Viererpotentials bzw. Viererstroms
Vs
haben dieselbe physikalische Einheit (
bzw. A/m2 ) und werden in der
m
Wellengleichung (1.42) gleich behandelt. Jede Komponente des Viererstroms
ist Quelle für die entsprechende Komponente des Viererpotentials. Diese 4dimensionale Betrachtungsweise entspricht dem Vorgehen in der speziellen
Relativitätstheorie (4-dimensionale Raum-Zeit).
(iii) Coulombeichung:
Diese Eichung zielt auf eine Zerlegung des elektrischen Feldes in eine quasistatische
und eine hochfrequente wellenartige Komponente.
• Seien , μ (stückweise) räumlich konstant. Mit einer passend gewählten Eichfunktion χ lässt sich die Coulombeichung (oder optische Eichung) erfüllen:
=0
(1.43)
div A
• Mit dieser Eichbedingung vereinfacht sich Gl. (1.37) zur Poissongleichung:
div(∇Φ) = −ρ(r , t)
(1.44)
Sie ist instantan bezüglich der Zeit t und sieht formal aus wie im elektrostatischen Fall, obwohl Φ(r , t) das elektromagnetische Skalarpotential ist. Dieses
folgt dem zeitlichen Verlauf der felderzeugenden Ladung ρ(r , t) ohne Verzögerung (ohne „Retardierung“), kann also keine Wellenausbreitung beschreiben.
= 0 vereinfacht sich (1.38) zu:
• Mit der Eichbedingung div A
2
− μ ∂ A = −μ j − ∂ (∇Φ)
ΔA
∂t2
∂t
j t
(1.45)
26
1.4 Feldverhalten an Materialgrenzen
mit der transversalen
Dies ist eine Wellengleichung für das Vektorpotential A
∂
(grad Φ).
Stromdichte j t := j − ∂t
Diese ist divergenzfrei (zum Beweis bilde man die Diverganz von Gl. (1.38)),
stellt also ein reines Wirbelfeld dar, zu dem neben der Stromdichte j auch die
Zeitableitung der Ladungsdichte ρ beiträgt, indem man die Lösung der Poissongleichung (1.44) auf der rechten Seite von (1.45) einsetzt. Die Lösungen
beschreiben die wellenartige Ausbreitung des elektromagnetischen Feldes
A
mit Retardierungseffekt.
1.4 Feldverhalten an Materialgrenzen
Wir nehmen an, dass zwar in zusammenhängenden räumlichen Gebieten die linearen
Materialgesetze (1.5)-(1.7) stückweise gültig sind, dass aber die Materialkoeffizienten
ε, μ und σ entlang von Grenzflächen zwischen benachbarten Gebieten unstetig ihren
Wert ändern. Das elektrische und das magnetische Feld sind dann an diesen Grenzflächen nicht differenzierbar und einzelne ihrer Komponenten sind nicht einmal mehr stetig.
Stattdessen gelten beim Übergang über eine Materialgrenze für die normalen und die
tangentialen Feldkomponenten gewisse Übergangsbedingungen, die im folgenden diskutiert werden.
1.4.1 Grenzflächenbedingung für die normalen Feldkomponenten
(r ) erfülle in benachbarten Gebieten Ω1 und Ω2 aus zwei ver(i) Das Vektorfeld U
1 und 2 die Differentialgleichung:
schiedenen Materialien =γ
div U
(1.46)
mit einer gewissen stetigen und beschränkten Volumendichte γ(r ).
= ρ oder div B
= 0.
Beispiele hierfür sind div D
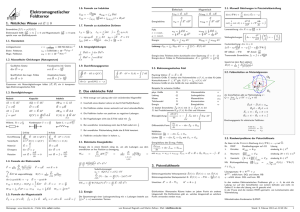
An der Grenzfläche Σ zwischen den beiden Gebieten Ω1 und Ω2 existiere eine
Grenzflächendichte ν(r ) der durch γ(r ) beschriebenen extensiven Größe (ist z.B.
γ = ρ = Raumladungsdichte, so ist ν = σ die Oberflächenladungsdichte). An
nicht differenziert werden und deshalb kann Gl. (1.46)
der Grenzfläche kann U
nicht verwendet werden. Stattdessen gilt für ein Kontrollvolumen V , welches die
Grenzfläche Σ schneidet, V ∩ Σ = ∅ (vgl. Abb. 1.2), die integrale Beziehung
∂V
· da =
U
V
γ d3 r +
ν da
V ∩Σ
(1.47)
1.4.1 Grenzflächenbedingung für die normalen Feldkomponenten
27
¶V
W2
V ÇS
W1
S
Abbildung 1.2: Grenzfläche Σ zwischen verschiedenen Materialbereichen und Kontrollvolumen V zur Ableitung der Sprungbedingung
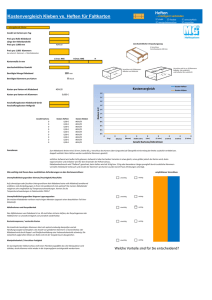
(r 0 ) die Oberflächeneinheits(ii) Für einen Punkt r 0 ∈ Σ auf der Grenzfläche sei N
2 zeigt. Z sei ein kleines zylin1 zum Material normale, die vom Material derförmiges Kontrollvolumen, dessen Stirnflächen A1 und A2 in den Gebieten Ω1
und Ω2 liegen, wobei A1 und A2 kongruent zur Schnittfläche Σ ∩ Z gewählt sind
(vgl. Abb. 1.3). Der Abstand von A1 und A2 sei Δh und entspricht der Höhe des
Zylindermantels M .
A2
r r
N (r0 )
S
W2
Kontrollvolumen Z
A1
Dh
r
r0 ÎS
W1
Abbildung 1.3: Zylindrisches Kontrollvolumen
Gl. (1.47) hat nun die spezielle Form
A1
· da +
U
A2
· da +
U
M
· da =
U
3
γd r+
Z
ν da
Z∩Σ
28
1.4 Feldverhalten an Materialgrenzen
Bezeichnet |A| den Flächeninhalt
von Z ∩ Σ,so ist |A1 | = |A2 | = |A|.
· da und γ d3 r; die verbleibenden Integrale
Für Δh → 0 verschwinden U
M
Z
ergeben mit Hilfe des Mittelwertsatzes
(r ) · N
(r 0 )|A| = ν(r 0 )|A|
(r ) · N
(r 0 ) |A| + lim U
−U
lim
r →
r
r →
r
0
r ∈Ω1
0
r ∈Ω2
Mit der Definition
j ·N
(r ) · N
(r 0 )
(r 0 ) := lim U
U
r →
r
0
r ∈Ωj
erhalten wir die
für die einseitigen Grenzwerte der Normalkomponenten von U
gesuchte Sprungbedingung
2·N
−U
1·N
= ν auf Σ
U
zeigt von 1 nach 2
N
(1.48)
an. Mit
(iii) Wir wenden nun die obige Aussage auf die dielektrische Verschiebung D
=D
, γ = ρ =Raumladungsdichte, ν = σint = Grenzflächenladungsdichte lautet
U
:
die Sprungbedingung für D
2·N
−D
1·N
= σint auf Σ
D
weist von 1 nach 2 )
(N
(1.49)
längs Σ ist gleich der GrenzflächenDer Sprung in der Normalkomponente von D
ladungsdichte σint auf Σ.
Speziell gilt bei verschwindender Grenzflächenladungsdichte:
1·N
=D
2·N
σint = 0 ⇒ D
auf Σ
ist stetig”
“Normalkomponente von D
Falls
(1.50)
= 0. Es gibt weder
(iv) Die magnetische Induktion erfüllt überall die Bedingung div B
= B
, γ = ν = 0.
eine Volumendichte γ noch eine Grenzflächendichte ν, also U
Damit folgt als Sprungbedingung für B :
1·N
=B
2·N
auf Σ
B
ist stetig”
“Normalkomponente von B
(1.51)
1.4.2 Grenzflächenbedingungen für die tangentialen Feldkomponenten
29
1.4.2 Grenzflächenbedingungen für die tangentialen
Feldkomponenten
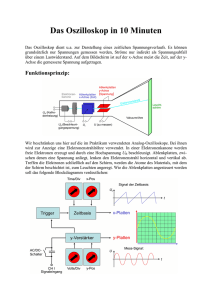
(r ) erfülle in benachbarten Gebieten Ω1 und Ω2 aus verschiedenen
(i) Das Vektorfeld U
2 die Differentialgleichung
1 und Materialien = J + V
rot U
(1.52)
mit einer stetigen Flussdichte J und einem beschränkten Vektorfeld V (r ).
= j + ∂ D oder rot E
= 0 − ∂ B .
Beispiele hierfür sind rot H
∂t
∂t
Auf der Grenzfläche Σ zwischen den beiden Gebieten Ω1 und Ω2 existiere eine
Grenzflächenflussdichte ν (r ) der durch J beschriebenen extensiven Größe (ist
z.B. J = j die elektrische Stromdichte, so ist ν = i die elektrische Oberflächenstromdichte).
Diese Grenzflächenflussdichte ist ein Vektorfeld, das stets in der Tangentialebene
von Σ verläuft.
¶A
r
n
A
W2
W1
åÇA
å
Abbildung 1.4: Grenzfläche Σ zwischen verschiedenen Materialbereichen und Kontrollfläche A zur Ableitung der Sprungbedingung.
nicht differenziert werden und deshalb kann die difAn der Grenzfläche kann U
ferentielle Formulierung (1.52) nicht verwendet werden. Stattdessen gilt für eine
Kontrollfläche A mit positiv orientierter Randkurve C = ∂A, welche die Grenzflä-
30
1.4 Feldverhalten an Materialgrenzen
che Σ schneidet (vgl. Abb. 1.4), die integrale Beziehung
dr =
U
J da +
A
∂A
V da +
A
ν · n ds
(1.53)
A∩Σ
wobei n die orientierte Oberflächennormale von A bezeichnet ( da = n da) und
ds das differentielle Linienelement entlang der Schnittlinie von A mit Σ (d.h. der
Kurve A ∩ Σ).
(r 0 ) = N
die vom Material
(ii) Für einen Punkt r 0 ∈ Σ auf der Grenzfläche sei N
1 zum Material 2 weisende Oberflächennormale und t (r 0 ) = t ein Tangential
vektor an Σ. Wir betrachten nun eine kleine rechteckige Kontrollfläche A, die auf
der Tangentialebene senkrecht steht und r 0 als Mittelpunkt hat (Abb. 1.5). Die
beiden Kanten γ1 und γ3 haben die Kantenlänge Δl und verlaufen parallel zu t
in den Gebieten Ω2 und Ω1 , die beiden Kanten γ2 und γ4 haben die Kantenlänge
Δb und verlaufen parallel zu N teilweise in Ω1 und teilweise in Ω2 . Mit dem in
Abb. 1.5 definierten Umlaufsinn hat das Rechteck A die orientierte Oberflächen × t .
normale n = N
r
g 1 = t Dl
Db
r
g 2 = - N Db
r
t
2
r
N
r
r0
Dl
S
1
r
g 4 = N Db
r
g 3 = -t Dl
Abbildung 1.5: Rechteckige Kontrollfläche senkrecht zur Grenzfläche Σ
Gl. (1.53) hat nun die spezielle Form:
4 dr =
U
i=1 γi
J + V
A
· n da +
ν · n ds
Σ∩A
Mit Hilfe des Mittelwertsatzes lassen sich die einzelnen Integrale wie folgt ausdrücken:
(r 1 ) · t Δl − U
(r 3 ) · t Δl + U
(r 4 ) · N
Δb − U
(r 2 ) · N
Δb
U
= J (r ∗ ) + V (r ∗ ) · n ΔlΔb + ν (r ∗∗ ) · n Δl
0
0
0
1.4.2 Grenzflächenbedingungen für die tangentialen Feldkomponenten
31
wobei r i Stützpunkte auf γi und r ∗0 sowie r ∗∗
0 Stützpunkte auf A bzw. Σ ∩ A
bezeichnen. Im Limes Δb → 0 verschwinden alle Terme proportional zu Δb; nach
Division durch Δl und anschließender Grenzwertbildung Δl → 0 verbleiben die
Terme
(r ) · t (r 0 ) − lim U
(r ) · t (r 0 ) = ν (r 0 ) · n (r 0 )
lim U
r →
r
r →
r0
r ∈Ω2
Mit der Definition
0
r ∈Ω1
(r ) · t (r 0 )
j · t (r 0 ) := lim U
U
r →
r
0
r ∈Ωj
erhalten wir
für die einseitigen Grenzwerte der Tangentialkomponenten von U
schließlich die gesuchte Sprungbedingung:
2 · t − U
1 · t = ν · n
U
(1.54)
auf Σ
(iii) Wir wollen die rechte Seite von Gl. (1.54) noch etwas vereinfachen. Wegen
× t gilt:
n = N
× t = ν × N
ν · n = ν · N
· t
Damit lautet die Sprungbedingung:
2 · t − U
1 · t = ν × N
U
· t
(1.55)
für jeden Tangentialvektor t
Die in dieser Gleichung auszurechnende Projektion auf die Tangentialebene der
Grenzfläche kann noch eleganter ausgedrückt werden. Der Projektor auf die Tangentialebene lautet:
=X
− (N
·X
)·N
= −N
× (N
×X
)
ΠX
(siehe Abb. 1.6)
Es gelten nun folgende Äquivalenzen:
· t = 0 für alle t ⊥N
(d.h. für alle Tangentialvektoren)
X
=0 ⇔ N
× N
×X
⇔ ΠX
×X
=0
=0 ⇔ N
×X
=N
× N
× N
×X
Die letzte Äquivalenz gilt wegen −N
32
1.4 Feldverhalten an Materialgrenzen
r
N
r rr
N ( NX )
r
PX
r
X
Abbildung 1.6: Projektor auf die Grenzflächentangentialebene
Damit lässt sich Gl. (1.55) folgendermaßen umformen:
2 · t − U
1 · t = (ν × N
) · t
U
für alle t ⊥ N
⇔
×U
2−N
(N
ν ) = ν
×U
1=N
× (ν × N
) = ν (N
·N
)−N
N
· 1
0
Hierbei wird benutzt, dass die Grenzflächenflussdichte ν stets tangential zu Σ
verläuft.
Damit erhalten wir nun die Sprungbedingung in der kompakten Formulierung
×U
2−N
×U
1 = ν
N
auf Σ
zeigt von 2 )
1 nach (N
(1.56)
∂B
wenden wir nun obige Aussage auf
∂t
an. Mit U
=E
, J = 0, V = − ∂ B und ν = 0 lautet die
das elektrische Feld E
∂t
:
Sprungbedingung für E
=−
(iv) Ausgehend vom Induktionsgestz rot E
1×N
=E
2×N
E
1 · t = E
2 · t
bzw. E
auf Σ
auf Σ
ist stetig”
“Tangentialkomponente von E
(1.57)
gehen wir vom Ampèreschen Gesetz rot H
= j + ∂ D aus
(v) Beim Magnetfeld H
∂t
und lassen die Existenz einer Grenzflächenstromdichte i zu.
33
=H
, J = j , V = ∂ D und ν = i lautet die Sprungbedingung für H
Mit U
∂t
dann:
×H
2−N
×H
1 = i auf Σ
N
(1.58)
zeigt von 1 nach 2 )
(N
Speziell gilt bei verschwindender Stromdichte i = 0:
1×N
=H
2×N
H
2 · t
1 · t = H
bzw. H
auf Σ
auf Σ
ist stetig”
“Tangentialkomponente von H
(1.59)
1.5 Das Randwertproblem der Potentialtheorie
Mit Hilfe des elektrischen Potentials lässt sich die Berechnung elektrostatischer Felder
auf die Berechnung einer skalaren Feldgröße Φ(r ) zurückführen. Im Falle der CoulombEichung gilt dies sogar für das elektromagnetische Skalarpotential Φ(r , t) (vgl. Gl. (1.44)).
Es ist daher zweckmäßig, sich mit einigen Grundtatsachen und Lösungsmethoden der
Potentialtheorie zu beschäftigen.
1.5.1 Das Randwertproblem der Elektrostatik: Rand- und
Grenzflächenbedingungen
(i) In einem dielektrischen Medium gelten im elektrostatischen Fall die Beziehungen
= E
, E
= −∇Φ, div D
= ρ. Die elektrische Permittivität wird als eine
D
positive (stückweise) differenzierbare Ortsfunktion (r ) angenommen. Setzt man
diese Gleichungen ineinander ein, so gelangt man zur Poissongleichung
div((r )∇Φ) = −ρ
(1.60)
Typischerweise ist diese partielle Differentialgleichung in einem Gebiet Ω ⊂ R3 zu
lösen. Für die Eindeutigkeit der Lösung müssen auf dem Rand ∂Ω Rand- bzw.
Grenzflächenbedingungen formuliert werden.
(ii) In elektrisch leitenden Medien gilt bei elektrostatischen Problemstellungen die Forderung j = 0, und da bei ohmschen Leitern j = −σ∇Φ gilt, folgt hieraus:
∇Φ = 0
34
1.5 Das Randwertproblem der Potentialtheorie
Hieraus können wir schließen:
(1.61)
Φ(r ) = const. auf Leitern
(iii) Grenzflächenbedingungen für das elektrische Potential an Materialgrenzen:
Wenn zwei Gebiete Ω1 und Ω2 mit unterschiedlichen Materialeigenschaften (Permittivität 1 = 2 bzw. Leitfähigkeit σ1 = σ2 ) an einer gemeinsamen Grenzfläche
Σ miteinander verbunden sind (Abb. 1.7), muss die Tangentialkomponente des
-Feldes längs Σ stetig sein: E
1 · t = E
2 · t für jeden Tangentialvektor t
E
= −∇Φ ist dann aber zu fordern, dass die Tangenti(vgl.Gl.(1.57)). Wegen E
alkomponente von ∇Φ längs Σ stetig ist. Durch Integration von t · ∇Φ in einem
infinitesimalen Abstand „links“ und „rechts“ von Σ folgt dann:
Φ ist längs Materialgrenzen stetig
r
t
r
n
r
r0
.
e2
e1
W1
W2
2
S
1
Abbildung 1.7: Tangenten- und Normalenvektor an einer Materialgrenzfläche Σ zwischen
zwei Dielektrika
(iv) Grenzflächenbedingungen für die Normalenableitung des Potentials:
An einer Materialgrenze mit einem Sprung der Permittivität (1 = 2 ) gilt nach
Gl. (1.49) für die Normalkomponente der dielektrischen Verschiebung die Sprung 2 · n − D
1 · n = σint , wobei σint eine auf der Grenzfläche Σ lokalisierte
bedingung D
= −∇Φ führt dies auf eine SprungFlächenladungsdichte bezeichnet. Wegen D
bedingung für die Normalenableitung des Potentials:
∂Φ ∂Φ − 2
= σint
1
∂n 1
∂n 2
wobei
auf Σ
∂Φ := lim n (r 0 ) · ∇Φ(r ) (j = 1, 2)
r0
∂n j rr→
∈Ω
j
(1.62)
1.5.1 Das RWP der Elektrostatik
35
den jeweils einseitigen Grenzwert der Richtungsableitung von Φ entlang der von
Ω1 zu Ω2 weisenden Grenzflächen-Normalen n bezeichnet.
1 ein Leiter ist,
(v) Einen Sonderfall stellt die Situation dar, wenn das Material 2 ein dielektrischer Isolator ist (Abb. 1.8). Im Leiter
während das Material r
E
r
n
.
r
r0
1 Leiter
r
E
Isolator 2
r
E
.
.
F = const.
Abbildung 1.8: Leiter und Isolator mit gemeinsamer Grenzfläche
-Feld, hat also an seinem Rand die Tangentialkomponente
verschwindet das E
1 · t = 0. Wegen der Stetigkeitsbedingung (1.57) hat dann das E
-Feld auch
E
2 · t = 0.
keine Tangentialkomponente im Grenzwert von der Seite des Isolators: E
Der einseitige Grenzwert des Potentialgradienten hat somit nur eine Normalkomponente
2 ⊥ Leiteroberfläche
−∇Φ|2 = E
dessen Größe sich aus der Grenzflächenladungsdichte σint auf der Leiteroberfläche
Σ ergibt:
2 = − 2 ∇Φ| schließlich
2 · n = σint und wegen D
Nach Gl. (1.49) gilt D
2
∂Φ = −σint
2
∂n 2
auf Σ
(1.63)
2
1 und (vi) Ein zweiter Sonderfall liegt vor, wenn zwei dielektrische Isolatoren aneinander grenzen, ohne dass auf der Grenzfläche Σ eine Oberflächenladung exis und die
tiert (Abb. 1.9). In dieser Situation sind die Tangentialkomponente von E
längs Σ stetig:
Normalkomponente von D
2 · t
1 · t = E
E
und
1 · n = D
2 · n
D
36
1.5 Das Randwertproblem der Potentialtheorie
j (j = 1, 2) und dividiert die zweite Gleichung durch
j = j E
Substituiert man D
die erste, so erhält man:
1 · t
2·t
1 E
1 E
= ·
·
1 · n
2 · n
1 E
2 E
r r
D2 ( E2 )
2
1
r
r
0
(1.64)
a2
.
r
n
a1
r r
D1( E1)
S
Abbildung 1.9: Feldlinienknick an Materialgrenze
Bezeichnen α1 und α2 die Winkel, welche die Feldlinien mit der Oberflächennormalen der Grenzfläche Σ in den Gebieten Ω1 und Ω2 einschließen, so gilt
(vgl. Abb. 1.10)
j · t
E
tan αj =
j · n
E
Eingesetzt in Gl. (1.64) ergibt sich das „Brechungsgesetz für elektrische Feldlinien“
tan α1
1
(1.65)
=
tan α2
2
r r
E ×t
a
r r
E ×n
Abbildung 1.10: Feldzerlegung an Materialgrenze
1.5.2 Klassifikation der Potential-Randwertprobleme
37
1.5.2 Klassifikation der Potential-Randwertprobleme
In elektrotechnischen Problemstellungen sucht man Lösungen Φ der Poissongleichung
(1.60) auf einem beschränkten Gebiet Ω ⊂ R3 , die auf dem Rand ∂Ω bestimmte Vorgaben (Randbedingungen) erfüllen. Diese Aufgabenstellung wird als Randwertproblem
bezeichnet. Die Randbedingungen lassen sich in drei Gruppen unterteilen: Vorgabe der
Potentialwerte auf ∂Ω (Dirichlet-Problem), Vorgabe der Normalenableitung ∂Φ/∂n auf
∂Ω (Neumann-Poblem) oder Vorgabe einer Linearkombination von beiden (gemischtes
Randwertproblem).
1.5.2.1 Dirichletsches Randwertproblem
(i) Die mathematische Problemstellung lautet: Zu lösen ist die Poissongleichung
div(∇Φ) = −ρ auf einem zusammenhängenden, beschränkten Gebiet Ω ⊂ R3 mit
glattem (lipschitz-stetigem) Rand ∂Ω, auf dem die Lösung Φ einen vorgegebenen
Verlauf ΦD (r ) annimmt: Φ(r ) = ΦD (r ) für alle r ∈ ∂Ω.
Die Kurzform dieses Dirichletschen Randwertproblems lautet:
[Dir-RWP]
div(∇Φ) = −ρ auf Ω̊
und
Φ|∂Ω = ΦD
(1.66)
(ii) Das so formulierte Randwertproblem ist mathematisch korrekt gestellt. Es gilt der
folgende Existenz- und Eindeutigkeitssatz:
Satz: Für ∈ C 1 (Ω) mit 0 < c0 ≤ (r ), ρ ∈ C(Ω) und
ΦD ∈ C(∂Ω) hat [Dir-RWP] eine eindeutig bestimmte klassische
Lösung Φ ∈ C 2 (Ω) ∩ C 1 (Ω).
(iii) Bemerkung: Ein Gebiet Ω mit den unter (i) beschriebenen Regularitätseigenschaften wird als „Normalgebiet“ bezeichnet. Es hat die wesentliche Eigenschaft, dass
der Integralsatz von Gauß angewendet werden darf.
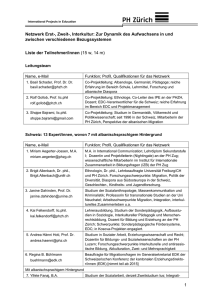
(iv) Ein typisches Beispiel für ein Dirichlet-RWP ist die MehrelektrodenKondensatoranordnung. Hier schließen N + 1 leitende Gebiete
Ω0 , Ω1 , . . . , ΩN ein dielektrisches Gebiet Ω ein (vgl. Abb. 1.11). Nach Gl. (1.61)
sind alle ∂Ωj Äquipotentialflächen mit konstantem Potentialwert Vj .
Das Dielektrikum zwischen den Kondensatorelektroden ∂Ωj sei elektrisch neutral;
d.h. es besitzt keine Raumladung: ρ ≡ 0. Das Randwertproblem besteht darin,
zu gegebenen Potentialwerten (V0 , V1 , . . . , VN ) ∈ RN +1 auf den Elektroden das
elektrische Potential Φ(r ) im Dielektrikum Ω zu bestimmen.
38
1.5 Das Randwertproblem der Potentialtheorie
r
n
r
n
¶W2
¶W1
W2
W1
W3
¶W3
r
n
¶Wn
r
n
r
n
Wn
r
e (r )
W
¶W0
Abbildung 1.11: Mehrelektroden-Kondensatoranordnung
In Kurzform lautet die Problemstellung:
[V-RWP]
div(∇Φ) = 0 in Ω und Φ|∂Ωl = Vl
(l = 0, 1, . . . , N )
(1.67)
Die Lösbarkeit dieses Randwertproblems garantiert der
Satz: [V-RWP] hat eine durch V = (V0 , V1 , . . . , VN ) eindeutig bestimmte, klassische Lösung Φ(r ).
1.5.2.2 Neumannsches Randwertproblem
(i) Die mathematische Problemstellung lautet hier: Zu lösen ist die Poissongleichung div(∇Φ) = −ρ auf einem zusammenhängenden, beschränkten Gebiet
Ω ⊂ R3 mit glattem (lipschitz-stetigem) Rand ∂Ω, auf dem die Normalenablei∂Φ
Φ(r ) (mit n = äußere Normale auf ∂Ω) einen
tung der Lösung
(r ) := n · ∇
∂n
vorgegebenen Wert FN (r ) annimmt.
Die Kurzform dieses Neumannschen Randwertproblems lautet:
[Neu-RWP]
∂Φ = FN
div(∇Φ) = −ρ auf Ω̊ und
∂n ∂Ω
(1.68)
1.5.2 Klassifikation der Potential-Randwertprobleme
39
NB: De facto entspricht die Neumann-Randbedingung der Vorgabe einer Ober (r ) · n (r ) = ∂Φ (r ) (r ∈ ∂Ω). Diese muss
flächenladungsdichte σ(r ) = −D
∂n
jedoch eine notwendige Voraussetzung erfüllen:
−
ρ d3 r =
Ω
div(∇Φ) d3 r =
Ω
∂Ω
∂Φ
∇Φ · da = da = FN da (1.69)
∂n
∂Ω
n da ∂Ω
Insbesondere
ist im Falle verschwindender Raumladung (ρ ≡ 0) die Bedingung
!
FN da = 0 notwendig für die Lösbarkeit des Randwertproblems.
∂Ω
Die Bedingung (1.69) hat eine sehr anschauliche Interpretation:
ρ d3 r = −
Ω
∂Ω
∂Φ
da =
∂n
· da =
D
∂Ω
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎨
Q(Ω)
⎪
⎪
⎪
⎪
⎪
− σ da
⎪
⎩
= in Ω eingeschlossene Ladung
= gesamte OF-Ladung auf ∂Ω
∂Ω
Die Oberflächenladung auf ∂Ω kompensiert also genau die in Ω eingeschlossene
Ladung, so dass die gesamte Anordnung nach außen elektrisch neutral ist. Die
gesamte Feldenergie ist somit im Inneren von Ω enthalten.
(ii) Das so formulierte Randwertproblem ist mathematisch korrekt gestellt. Es gilt der
folgende Existenz- und Eindeutigkeitssatz:
Satz: Für ∈ C1 (Ω) mit 0 < c0 ≤ (r ), ρ ∈ C(Ω), FN ∈
FN da = − ρ d3 r hat [Neu-RWP] eine bis auf
C(∂Ω) mit
∂Ω
Ω
eine additive Konstante eindeutig bestimmte klassische Lösung
Φ ∈ C 2 (Ω) ∩ C 1 (Ω)
(iii) Ein mit dem Neumannschen-RWP eng verwandtes Problem bietet die in § 1.5.2.1
bereits betrachtete Mehrelektroden - Kondensatoranordnung, wobei aber nun die
auf den Elektroden ∂Ωl befindlichen Gesamtladungen Ql vorgegebenen werden.
Das Randwertproblem besteht also darin, zu gegebenen Ladungen
(Q0 , Q1 , Q2 , ..., QN ) ∈ RN +1 auf den Elektroden das elektrische Potential Φ(r ) im
Dielektrikum Ω zu bestimmen. Die Lösbarkeitsbedingung (1.69) lässt sich hierbei
als Ladungsneutralitätsbedingung
N
Ql = 0 ausdrücken.
l=0
In Kurzform lautet die Problemstellung:
[Q-RWP]
div(∇Φ) = 0 in Ω und
∂Ωl
∂Φ
da = Ql für l = 0, 1, ..., N (1.70)
∂n
40
1.5 Das Randwertproblem der Potentialtheorie
Die Lösbarkeit dieses Randwertproblems gewährleistet der
Satz: [Q-RWP] hat eine durch die Vorgabe von
Q = (Q0 , Q1 , ..., QN ) ∈ R
N +1
mit
N
Ql = 0 bis auf eine additive
l=0
Konstante eindeutig bestimmte Lösung Φ(r ).
1.5.2.3 Gemischtes Randwertproblem, Randbedingung dritter Art
(i) Die mathematische Problemstellung lautet hier: Zu lösen ist die Poissongleichung div(∇Φ) = −ρ auf einem Normalgebiet Ω ⊂ R3 , so dass auf dessen Rand
∂Ω für gegebene Koeffizientenfunktionen α(r ) und β(r ) die Linearkombination
∂Φ
α(r )Φ(r ) + β(r ) (r ) einen vorgegebenen Wert F (r ) annimmt.
∂n
Dabei müssen an α, β und F gewisse Forderungen gestellt werden, damit die Lösbarkeit gewährleistet ist. Diese sollen anhand der folgenden Beispiele abgeleitet
werden.
(ii) Ein erstes Beispiel stellt ein realer elektrischer Kontakt mit ohmschem Kontaktwiderstand dar (Abb. 1.12). Der Kontakt ist eine dünne Schicht der Dicke d und
elektrischer Leitfähigkeit σ∂Ω , welche ein leitendes Gebiet Ω (z.B. Bauelement) der
Leitfähigkeit σΩ mit der Außenfläche des Kontakts (=„Klemme“) verbindet. Beide
Seiten der Kontaktschicht sind Äquipotentialflächen mit Potentialwerten Φin an
der Innenseite und ΦKlemme an der Außenseite. Innerhalb der Kontaktschicht hat
das Potential einen linearen Verlauf; die elektrische Feldstärke hat den konstanten
= 1 (Φin − ΦKlemme ) n , wobei n die äußere Normale auf ∂Ω bezeichnet.
Wert E
d
sW
s ¶W
d
W
F(s)
.
F in
F in
ÑF
I Klemme
r
n
F Klemme
0
d
F Klemme
r r
n×r = s
Abbildung 1.12: Realer elektrischer Kontakt mit Kontaktwiderstand
= −σ∇Φ und der Bedingung, dass die elekMit dem Ohmschen Gesetz j = σ E
trische Stromdichte beim Übergang von Ω in die Kontaktschicht stetig ist, folgt
1.5.2 Klassifikation der Potential-Randwertprobleme
41
folgende gemischte Randbedingung für das elektrische Potential:
IKlemme
∂Φ (!)
Φin − ΦKlemme
= σ∂Ω
= j · n = − σΩ
= γel (Φin − ΦKlemme ) (1.71)
∂n ∂Ω
d
σ∂Ω
= γel als Übergangsleitwert bezeichnet wird und ΦKlemme einen vorged
gebenen Wert besitzt. Durch Division mit σΩ erhält man aus (1.71) die übliche
Form einer gemischten Randbedingung für Φ auf der Übergangsfläche ∂Ω:
wobei
γel
∂Φ =
Φ+
σΩ
∂n ∂Ω
γel
σΩ
ΦKlemme
auf ∂Ω
(1.72)
hel ≥ 0
Mit dem Übergangskoeffizienten hel :=
γel
lässt sich diese noch kürzer formulieren:
σΩ
∂Φ
= hel (ΦKlemme − Φ) auf ∂Ω
∂n
(1.73)
Man beachte, dass der Übergangskoeffizient hel eine positive Größe ist; dies gewährleistet, dass der Klemmenstrom in Richtung des elektrischen Feldes fließt und
stellt eine Lösbarkeitsbedingung für das gemischte Randwertproblem dar!
Mit Hilfe des Übergangskoeffizienten kann man zwischen Dirichletschen und Neumannschen Randbedingungen „interpolieren“:
∂Φ
= 0 (isolierender
Für hel = 0 folgt die homogene Neumann-Randbedingung
∂n
Rand),
für hel → ∞ folgt die Dirichlet-Randbedingung Φ = ΦKlemme (idealer ohmscher
Kontakt).
(iii) Als zweites Beispiel betrachten wir den Wärmetransport durch Wärmeleitung in
einem Festkörper. Die Wärmestromdichte J Q fließt dabei in Richtung des negativen Gradienten der Temperatur T :
J Q = −κ∇T
(1.74)
wobei κ die spezifische Wärmeleitfähigkeit bezeichnet. Dieses „ Fouriersche Gesetz
der Wärmeleitung“ ist das thermische Analogon zum Ohmschen Gesetz.
Die thermische Energie gehorcht einer Bilanzgleichung der allgemeinen Form (1.25);
bei stationärem Wärmefluss lautet sie:
div J Q = ΠQ
(1.75)
wobei ΠQ (r ) die lokale Wärmeproduktionsrate („Heizleistungsdichte“) bezeichnet.
42
1.5 Das Randwertproblem der Potentialtheorie
Mit J Q aus Gl. (1.74) ergibt sich eine Poissongleichung für die Temperatur T :
div(κ∇T ) = −ΠQ
(1.76)
Diese ist auf einem Gebiet Ω ⊂ R3 zu lösen, über dessen Rand ∂Ω (oder Teile
davon) die Wärme über thermische Kontakte „nach außen“ abfließen kann.
Das thermische Kontaktmodell ist analog zum elektrischen Kontaktmodell (siehe vorheriger Abschnitt) gebildet: Der Kontakt ist eine dünne Schicht entlang
∂Ω der Dicke d und der thermischen Leitfähigkeit κ∂Ω , welche das wärmeleitende Gebiet Ω mit der Außenfläche des Kontakts verbindet. Beide Seiten der
Kontaktschicht sind Isothermen mit Temperaturwerten Tin an der Innenseite und
Text an der Außenseite. Innerhalb der Kontaktschicht hat das Temperaturprofil
einen linearen Verlauf; der negative Temperaturgradient hat den konstanten Wert
1
−∇T = (Tin − Text ) n , wobei n die äußere Normale auf ∂Ω bezeichnet.
d
kW
k¶ W
r
JQ
Tin
d
W
.
r r
J Q × n = IQ
ÑT
Text
r
n
d
0
r r
n×r = s
Abbildung 1.13: Thermischer Übergang durch eine Grenzschicht
Mit dem Fourierschen Gesetz J Q = −κ∇T und der Bedingung, dass die Wärmestromdichte beim Übergang von Ω in die Kontaktschicht stetig ist, folgt folgende
gemischte Randbedingung für die Temperatur:
Tin − Text
∂T (!)
= κ∂Ω
IQ = J Q · n = −κΩ ·
= K (Tin − Text )
∂n ∂Ω
d
(1.77)
wobei κΩ und κ∂Ω die Wärmeleitfähigkeiten im Gebiet Ω und in der Kontaktschicht
κ∂Ω
den Wärmeübergangskoeffizienten („K-Wert“) darstellt.
bezeichnen und K :=
d
Die Außentemperatur Text hat einen vorgegebenen Wert. Durch Division mit κΩ
erhält man aus (1.77) die übliche Form einer gemischten Randbedingung für die
Temperatur T auf der Übergangsfläche ∂Ω:
K
∂T
T+
κΩ
∂n
=
∂Ω
K
κΩ
hth 0
Text
auf ∂Ω
(1.78)
1.5.2 Klassifikation der Potential-Randwertprobleme
43
Mit dem normierten Wärmeübergangskoeffizienten hth :=
bedingung noch kompakter formulieren:
K
lässt sich diese RandκΩ
∂T
= hth (Text − T ) auf ∂Ω
∂n
(1.79)
Man beachte, dass auch in diesem Fall der Übergangskoeffizient hth eine positive
Größe ist; dies gewährleistet, dass der Wärmestrom von der höheren zur niedrigeren Temperatur fließt und stellt eine Lösbarkeitsbedingung für das gemischte
Randwertproblem dar!
Mit Hilfe des Wärmeübergangskoeffizienten kann man auch hier zwischen zwei extremen Situationen interpolieren:
∂T
= 0 (völlige therFür hth = 0 folgt die homogene Neumann-Randbedingung
∂n
mische Isolation),
für hth → ∞ folgt die Dirichlet-Randbedingung T = Text (Anschluss an ein Wärmereservoir („Wärmesenke“) mit fester Temperatur Text ).
(iv) Die generische Kurzform eines gemischten Randwertproblems (oder Randwertproblems dritter Art) lautet somit folgendermaßen:
Sei Ω ⊂ R3 ein Normalgebiet (zusammenhängend, beschränkt, mit lipschitz-stetigem
Rand ∂Ω). Finde eine Lösung Φ des Problems
[Mix-RWP]
div(σ∇Φ) = −Π auf Ω̊ und
∂Φ
+ hΦ
∂n
= F auf ∂Ω
(1.80)
∂Ω
Aus physikalischen und mathematischen Gründen ist hierbei zu fordern:
σ > 0 und h ≥ 0
(v) Das oben formulierte Randwertproblem ist mathematisch korrekt gestellt. Es gilt
der folgende Existenz- und Eindeutigkeitssatz:
Satz: Für σ ∈ C 1 (Ω) mit 0 < c0 ≤ σ(r ), Π ∈ C(Ω), h ∈ C(∂Ω) mit
h ≥ 0, h = 0, und F ∈ C(∂Ω) hat [Mix-RWP] eine eindeutig
bestimmte klassische Lösung Φ ∈ C 2 (Ω) ∩ C 1 (Ω).
44
1.5 Das Randwertproblem der Potentialtheorie
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
Um ein auf der Poissongleichung basierendes Randwertproblem konkret zu lösen, gibt es
neben computergestützten numerischen Techniken auch traditionelle analytische Verfahren, die -für hinreichend einfache Geometrien- eine explizite Lösung liefern. Im folgenden
soll für drei dieser Verfahren ein kurzer Abriss gegeben werden.
1.5.3.1 Orthogonalentwicklung nach Eigenfunktionen des Laplace-Operators
(Spektraldarstellung)
(i) Wir legen (exemplarisch) folgende Problemstellung zugrunde:
Wir betrachten ein Normalgebiet Ω ⊂ R3 , das aus dielektrischem Material der Permittivität ∈ C 1 (Ω) besteht, mit 0 < c0 ≤ (r ). Der Rand ∂Ω besteht aus Teilen
∂Ω(D) , auf denen das Potential vorgegebenen ist (Dirichletsche Randbedingung:
Φ|∂Ω(D) = ΦD ), und davon disjunkten Teilen ∂Ω(N ) , auf denen die Oberflächenlades Potentials vorgegeben ist
dungsdichte σN und damit die Normalenableitung
∂Φ (Neumannsche Randbedingung: = σN ). Damit die Lösung der Poisson∂n ∂Ω(N )
gleichung eindeutig ist (vgl. §1.5.2.2), muss zumindest auf einem Teil des Randes
das Potential gegeben sein, d.h. ∂Ω(D) = ∅.
In Kurzform lautet die Problemstellung dieses gemischten Randwertproblems somit:
[M-RWP]
div(∇Φ) = −ρ in Ω̊
mit Φ|∂Ω(D)
∂Φ = ΦD und = σN ,
∂n ∂Ω(N )
(1.81)
wobei ∂Ω = ∂Ω(D) ∪ ∂Ω(N) , ∂Ω(D) ∩ ∂Ω(N) = ∅, ∂Ω(D) = ∅
Um die eindeutige Lösung dieses Randwertproblems zu konstruieren, gehen wir in
drei Schritten vor.
(ii) Lösungsschritt 1:
Man konstruiere zunächst eine auf Ω definierte, hinreichend glatte Funktion
Φ(0) ∈ C 2 (Ω) ∩ C 1 (Ω), welche die inhomogenen Randbedingungen erfüllt:
Φ
(0) ∂Ω(D)
∂Φ(0) = ΦD und = σN .
∂n ∂Ω(N )
Für die Lösung Φ von [M-RWP] macht man dann den Ansatz Φ = Φ(0) + ϕ.
Die Funktion ϕ ist dann eine Lösung des modifizierten Randwertproblems mit
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
45
homogenen Randbedingungen:
div (∇ϕ) = −ρ − div ∇Φ(0) =: −f
∂ϕ ∂n ϕ|∂Ω(D) = 0,
in Ω
(1.82)
=0
∂Ω(N )
(iii) Lösungsschritt 2:
Die Lösung ϕ des Randwertproblems (1.82) kann man aus den Eigenfunktionen
bν (r ) und Eigenwerten λν ∈ C des Differentialoperators − div(∇ . ) aufbauen.
Letztere sind die Lösungen des Eigenwertproblems
− div(∇bν ) = λν bν
mit bν |∂Ω(D)
∂bν = 0 und
∂n in Ω̊
=0
(1.83)
∂Ω(N )
Für beschränkte, zusammenhängende Gebiete Ω mit glattem Rand (Normalgebiete) haben Eigenwerte und Eigenfunktionen folgendene Eigenschaften:
a) Das Spektrum {λν |ν = 1, ..., ∞} ist diskret und alle Eigenwerte sind strikt
positiv: λν > 0. Man kann sie als aufsteigende Folge 0 < λ1 ≤ λ2 ≤ λ3 ≤ . . .
anordnen.
b) Die Eigenfunktionen {bν }ν∈N können orthonormal im Funktionenraum L2 (Ω)
gewählt werden. Hierbei ist das Skalarprodukt zweier Funktionen f, g ∈ L2 (Ω)
definiert als
< f |g >:= f (r )∗ g(r ) d3 r
(1.84)
Ω
Die orthonormierten Eigenfunktionen bν erfüllen also die Bedingungen
< bμ |bν > =
bμ (r )∗ bν (r ) d3 r = δμν
(1.85)
Ω
mit dem Kroneckerschen Deltasymbol δμν .
c) Die Eigenfunktionen {bν }ν∈N sind vollständig; d.h. jede Funktion ϕ ∈ L2 (Ω)
lässt sich bezüglich des Skalarproduktes (1.84) nach b1 , b2 , b3 , . . . entwickeln:
ϕ=
∞
ν=1
αν bν mit αν =< bν |ϕ >
(1.86)
46
1.5 Das Randwertproblem der Potentialtheorie
Diese Beziehung lautet explizit:
∀
∞
ϕ(r ) =
ϕ∈L2 (Ω)
ν=1
Ω
∞
Ω
ν=1
=
bν (r )∗ ϕ(r ) d3 r
bν (r )
bν (r )bν (r )∗ ϕ(r ) d3 r
Deltafunktion δ(r − r )
woraus man die Vollständigkeitsrelation der Eigenfunktionen ableiten kann:
∞
bν (r )bν (r )∗ = δ(r − r )
(1.87)
ν=1
(iv) Lösungsschritt 3:
Für eine gegebene rechte Seite f des Randwertproblems (1.82) konstruieren wir
nun die Lösung ϕ mit dem Ansatz ϕ(r ) =
∞
αν bν (r ), wobei die Entwicklungs-
ν=1
koeffizienten αν noch zu bestimmen sind. Die homogenen Randbedingungen für ϕ
werden identisch erfüllt, weil sie von allen Basisfunktionen bν erfüllt werden (vgl.
(1.83)). Es bleibt also noch die Poissongleichung zu lösen. Setzt man in diese den
obigen Ansatz ein, so folgt:
!
f = − div(∇ϕ) =
∞
αν [− div(∇bν )] =
ν=1
λν bν
∞
αν λ ν b ν
ν=1
Das Skalarprodukt dieser Gleichung mit bμ ergibt
< bμ |f > =
∞
αν λν < bμ |bν > = αμ λμ
ν=1
δμν
Hieraus erhält man die Entwicklungskoeffizienten αμ als
< bμ |f >
1 αμ =
=
bμ (r)∗ f (r )d3 r
λμ
λμ
Ω
Damit lautet die Lösung des RWP (1.82)
ϕ(r ) =
∞
< bν |f >
ν=1
λν
bν (r )
(1.88)
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
47
Durch Vertauschen von Summation und Integration folgt hieraus die alternative
Darstellung:
ϕ(r ) =
∞
bν (r )
Ω ν=1
1
bν (r )∗ f (r ) d3 r
λν
(1.89)
Greenfunktion G(r , r )
Diese Gleichung kann man als linearen Integraloperator f → ϕ auffassen, der jeder
rechten Seite des RWP (1.82) die Lösung ϕ zuordnet. Dieser Integraloperator ist
also der Umkehroperator zum Differentialoperator − div(∇ . ); sein Integralkern
G(r , r ) wird als Greenfunktion des RWP (1.82) bezeichnet. Die Spektraldarstellung
G(r , r ) =
∞
ν=1
bν (r )
1
bν (r )∗
λν
(1.90)
bietet eine konkrete Möglichkeit, die Greenfunktion zu berechnen. Deren definierende Eigenschaften und weitere Möglichkeiten, sie zu bestimmen, werden im folgenden diskutiert.
1.5.3.2 Lösung mittels Greenfunktion
(i) Die Greenfunktion G(r , r ) für das in (1.81) definierte exemplarische Randwertproblem [M-RWP] ist definiert als die Lösung des reduzierten Randwertproblems
(1.82) mit homogenen Randbedingungen und rechter Seite f (r ) = δ(r −r ) („Einheits - Punktladung“ am Ort r ). Die definierende Beziehung lautet also:
divr ((r )∇r G(r , r )) = −δ(r − r ) in Ω̊
mit G(r , r ) = 0 für r ∈ ∂Ω(D)
(1.91)
∂G(r , r )
und
= 0 für r ∈ ∂Ω(N )
∂n
Die Ortsableitungen sind hierbei im Distributionssinn zu verstehen („verallgemeinerte Ableitung“).
48
1.5 Das Randwertproblem der Potentialtheorie
(ii) Ist ϕ die Lösung des RWP (1.82), so gilt:
δ(r − r )ϕ(r ) d3 r
ϕ(r ) =
Ω
=−
divr̃ ( ∇r G(r , r )) ϕ(r ) d3 r
Ω
−
=−
0
n · ∇r G(r , r ) ϕ(r ) da
∂Ω(N )
0
3 G(r , r ) divr̃ ( ∇r ϕ(r )) d r +
Ω
−f (r )
∂Ω(D)
G(r , r ) (r ) n · ∇r ϕ(r ) da
0
G(r , r ) (r ) n · ∇r ϕ(r ) da
+
∂Ω(N )
=
∇r G(r , r ) ϕ(r ) da ∂Ω(D)
Ω
∇r G(r , r ) · ∇r ϕ(r ) d3 r −
=
3 G(r , r )f (r ) d r =
Ω
0
G(r , r )f (r ) d3 r
Ω
Bei der letzten Gleichheit wurde verwendet, dass die Greenfunktion symmetrisch
bezüglich einer Vertauschung von r und r ist: G(r , r ) = G(r , r ). Dies ist auch
aus Gl. (1.90) ersichtlich (man beachte, dass G(r , r ) reellwertig ist). Als Endergebnis erhalten wir also diesselbe Aussage wie in Gl. (1.89):
ϕ(r ) =
G(r , r )f (r ) d3 r
Ω
löst das Randwertproblem (1.82)
(iii) Kennt man die Eigenfunktionen und Eigenwerte von − div(∇ . ), so gilt nach
(1.89) die Spektraldarstellung:
G(r , r ) =
∞
bν (r )
ν=1
1
bν (r )∗
λν
Für unbeschränkte Gebiete Ω gilt eine analoge Darstellung, aber das Spektrum
der Eigenwerte bildet eine kontinuierliche Menge Σ ⊂ R+ , und deshalb muss die
diskrete Summe durch ein Integral ersetzt werden:
∞
ν=1
(. . . , bν , λν , . . .)
→
(. . . , bk , λk , . . .) dμ(k)
k∈Σ
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
49
(iv) Als einfaches Beispiel wollen wir die Spektraldarstellung der Greenfunktion für
den Quader Ω = (0, L1 ) × (0, L2 ) × (0, L3 ) mit homogenen Dirichletbedingungen
und konstanter Permittivität = const. berechnen. Das Randwertproblem lautet
in diesem Fall:
−Δϕ =
1
f =: f in Ω mit ϕ|δΩ = 0
(1.92)
Die Geometrie des Problems legt es nahe, die Eigenfunktionen in kartesischen
Koordinaten r = x1e 1 + x2e 2 + x3e 3 zu bestimmen und einen Separationsansatz
b(r ) = b1 (x1 ) · b2 (x2 ) · b3 (x3 )
zu machen.
Wegen Δ =
∂2
∂2
∂2
+
+
lautet dann das Eigenwertproblem:
∂x21 ∂x22 ∂x23
−Δb = −b1 b2 b3 − b1 b2 b3 − b1 b2 b3 = λ b1 b2 b3
!
Hieraus folgt durch Division mit b1 b2 b3 :
−
b1 (x1 ) b2 (x2 ) b3 (x3 )
−
−
=λ∈R
b1 (x1 ) b2 (x2 ) b3 (x3 )
Da jeder der Summanden nur von einer der Koordinaten x1 , x2 , x3 alleine abhängt,
muss er für sich eine Konstante sein:
−
b1 (x1 )
b (x2 )
b (x3 )
= λ1 ; − 2
= λ2 ; − 3
= λ3
b1 (x1 )
b2 (x2 )
b3 (x3 )
Damit genügt jede Funktion bi (xi ) der Differentialgleichung
bj (xj ) + λj bj (xj ) = 0
(j = 1, 2, 3)
Deren allgemeine Lösung lautet
bj (xj ) = Aj sin(kj xj ) + Bj cos(kj xj ) mit kj =
λj
Um die Randbedingungen auf ∂Ω zu erfüllen, muss gelten:
bj (0) = 0
⇒
Bj = 0
bj (Lj ) = 0
⇒
kj Lj = nj π mit nj ∈ N
Damit gilt kj = nj π/Lj (nj ∈ N). Die Eigenwerte sind dann
λn1 n2 n3
n1 π
= λ1 + λ2 + λ3 =
L1
2
n2 π
+
L2
2
+
n3 π
L3
2
(1.93)
50
1.5 Das Randwertproblem der Potentialtheorie
und die Faktoren der Eigenfunktionen lauten:
π
bj (xj ) = Aj sin nj
xj
Lj
(1.94)
Die Normierung der Eigenfunktionen erfolgt faktorweise:
!
Lj
1=
2
bj (xj ) dxj =
Lj
A2j
sin
0
π
nj
xj
Lj
2
0
woraus folgt:
!
Aj =
dxj = A2j
Lj
2
2
Lj
Damit lauten die Eigenfunktionen:
3
3
"
π
(2) 2
bn1 n2 n3 (r ) = √
sin nj
xj ;
Lj
L1 L2 L3 j=1
nj ∈ N
(1.95)
Die Greenfunktion ist schließlich gegeben als
G(r , r ) =
n1 ,n2 ,n3 ∈N
bn1 n2 n3 (r )
1
λn1 n2 n3
bn1 n2 n3 (r )
(1.96)
Eingesetzt in Gl. (1.89) erhält man eine Darstellung der Lösung des RWP (1.92)
als diskrete Fourier-Reihe.
1.5.3.3 Konstruktion der Greenfunktion mit Hilfe der Spiegelladungsmethode
(i) Eine rein geometrische Konstruktion der Greenfunktion leistet die Spiegelladungsmethode, wenn das betrachtete Gebiet Ω von einer oder einigen wenigen ebenen leitenden Randflächen begrenzt wird (z.B. Halbraum oder Winkelraum). Ausgangspunkt ist hierbei die Greenfunktion zur Poissongleichung im unbeschränkten
homogenen Raum Ω = R3 , die sogenannte Vakuum-Greenfunktion.
(ii) Herleitung der Vakuum-Greenfunktion:
Eine Punktladung Q bei r 0 erzeugt im unbeschränkten Raum mit konstanter Permittivität 0 das Potential
ϕ(r ) =
1
Q 1
·
·
0 4π |r − r 0 |
(1.97)
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
51
Dieses erfüllt im Unendlichen die homogene Dirichlet-Randbedingung
lim ϕ(r ) = 0
(1.98)
|
r |→∞
Dies bedeutet, dass das Coulomb-Potential (1.97) die Poissongleichung (im Distributionssinn) löst:
− div(0 ∇ϕ) = −Q Δr
1
1
4π |r − r 0 |
Q δ(r − r 0 )
=
(1.99)
Punktladungsdichte
Durch Vergleich mit (1.91) erkennt man, dass
GVac (r , r ) =
1
1
4π0 |r − r |
(1.100)
die Greenfunktion zur Poissongleichung in Ω = R3 mit der Randbedingung (1.98)
darstellt. Das heißt, dass (im Sinne einer Distributionsableitung) gilt:
Δr
1
1
4π |r − r |
= −δ(r − r )
In der Tat wird die Poissongleichung Δϕ = −
Coulomb-Integral
ϕ(r ) =
R3
(1.101)
ρ
im gesamten R3 gelöst durch das
0
1 ρ(r ) 3 GVac (r , r )ρ(r ) d r =
dr
4π0 3 |r − r |
3 (1.102)
R
(iii) Aus der Vakuum-Greenfunktion (1.100) lässt sich die Greenfunktion für den Halbraum mit ideal leitendem Rand konstruieren (siehe Abb. 1.14).
Das dielektrische Gebiet ist der Halbraum
Ω = H := {r = r || + zn | r || · n = 0;
z > 0},
dessen Rand von der Ebene
∂H = {r = r || | r || · n = 0;
z = 0}
gebildet wird. Hierbei ist n der Normalenvektor der Ebene ∂H. Die Permittivität
sei im Halbraum H konstant. Der unterhalb der Randfläche liegende Halbraum
z ≤ 0 sei ein (idealer) metallischer Leiter, der zusammen mit der Ebene ∂H ein
Äquipotentialgebiet mit konstantem Potential bildet, das auf den Wert Φ(r ) = 0
gesetzt werden kann. Um die Greenfunktion für den Halbraum H zu bestimmen,
wird eine Punktladung Q an den Ort r Q ∈ H gesetzt und das von Q erzeugte
Potential bestimmt.
52
1.5 Das Randwertproblem der Potentialtheorie
r
rQ
r
n
r
rQ
Q
0x
Q
r xr
n rQ*
e
r
rP
Ebene ¶H
r
rP
H
H*
metallischer Halbraum
e
F = const. = 0
Reales Problem
-Q
Ersatzproblem
Abbildung 1.14: Punktladung vor metallischem Halbraum
Statt dieses reale Problem zu lösen, betrachten wir aber ein Ersatzproblem, indem
wir das Dielektrikum über ∂H hinaus nach unten fortsetzen (mit gleicher Permittivität wie in H). In dieses virtuelle Dielektrikum wird am Punkt r ∗Q , der durch
Spiegelung des Punktes r Q an der Ebene ∂H entsteht, eine virtuelle Gegenladung
−Q plaziert. Ladung und Gegenladung erzeugen im Halbraum H das elektrische
Potential
#
1
Q
1
ΦH (r ) =
−
4π |r − r Q | |r − r ∗Q |
$
für r ∈ H
(1.103)
Dieses Potential zum Ersatzproblem stimmt im Halbraum H mit dem Potential
des realen Problems überein. Denn es erfüllt zum einen die Poissongleichung in H
mit der Ladung Q am Ort r Q als Quelle, da mit (1.101) gilt:
div( ∇ΦH ) = Q · Δr
1
1
− Q · Δr
4π |r − r Q |
1
1
4π |r − r ∗Q |
= −Q δ(r − r Q ) + Q δ(r − r ∗Q )
= 0 für r ∈ H
(Man beachte: Da für r ∈ H stets r = r ∗Q gilt, liefert die zweite Deltafunktion in
H keinen Beitrag.)
Zum anderen erfüllt ΦH auch die Randbedingung auf ∂H:
Für r ∈ ∂H gilt |r − r Q | = |r − r ∗Q |, und damit ist ΦH (r ) = 0 für r ∈ ∂H.
Die Greenfunktion für den Halbraum GH (r , r ) erhalten wir aus Gl. (1.103),
indem wir Q = 1 und r Q = r setzen. Bezeichnen wir die Spiegelung an der Ebene
∂H mit S:
r = r || + zn → r ∗ = Sr := r || − zn
1.5.3 Analytische Lösungsverfahren für die Poissongleichung
53
so lautet die Greenfunktion
#
1
1
1
−
GH (r , r ) =
4π |r − r | |r − Sr |
$
(1.104)
Für beliebige Ladungsverteilungen ρ(r ), r ∈ H ist
Φ(r ) =
GH (r , r )ρ(r ) d3 r
(1.105)
H
die Lösung des Potentialproblems in H. Explizit lautet dieses Integral
⎡
⎤
1 ⎣ ρ(r ) 3 ρ(r )
Φ(r ) =
r
−
d
d3 r ⎦
4π
|r − r |
|r − Sr |
H
H
(siehe Abb. 1.15)
Reales Problem
r
r (r )
Ersatzproblem
H
r
r (r )
gespiegelt
F=0
Metall
r
- r (r * )
Abbildung 1.15: Ladungsspiegelungsprinzip beim Halbraum-Problem
54
1.5 Das Randwertproblem der Potentialtheorie
(iv) In analoger Weise lässt sich die Spiegelladungsmethode auf einen Viertelraum
(90◦ - Winkelraum) mit metallischer Begrenzung anwenden (Abb. 1.16).
Reales Problem
Ersatzproblem
¶W
y
W
Q
r
rQ
r
S1rQ
-Q
Q
r
rQ
O
O
r
S2rQ
F(r ) = const.= 0
r
S3rQ
+Q
x
-Q
Abbildung 1.16: Punktladung vor metallischem 90◦ - Winkelraum
Der Viertelraum W habe eine konstante Permittivität . Zwei Halbebenen bilden
den Rand ∂W , auf dem das Potential der Randbedingung Φ∂W = 0 genügen muss.
Um diese zu erfüllen, wird die reale Punktladung Q am Ort rQ dreimal gespiegelt
an die Punkte S1r Q , S2r Q und S3r Q mit der Ladung −Q, +Q und −Q (siehe
Abb. 1.16). Das Potential zum Ersatzproblem lautet dann:
Q
ΦW (r ) =
4π
#
1
1
−
|r − r Q | |r − S1r Q |
$
1
1
+
−
|r − S2r Q | |r − S3r Q |
(1.106)
für r ∈ W
Es stimmt im Winkelraum W mit dem Potential des realen Problems überein, wie
man analog zum Halbraumproblem beweisen kann. Insbesondere erfüllt ΦW die
Randbedingung ΦW (r ) = 0 für r ∈ ∂W , weil sich für r ∈ ∂W jeweils zwei der
vier Terme in Gl. (1.106) paarweise kompensieren.
Die Greenfunktion für den Winkelraum GW (r , r ) erhält man aus Gl. (1.106),
indem man Q = 1 und r Q = r setzt. Sie lautet
GW (r , r ) =
3
1 (−1)n
4π n=0 |r − Snr |
wobei S0r = r die identische Abbildung bezeichnet.
(1.107)
1.5.4 Stationäre Stromverteilung
55
1.5.4 Stationäre Stromverteilung
Auf ein Potentialproblem führt auch die Berechnung stationärer Stromverteilungen in
leitenden Materialien. Die bereits dargestellten theoretischen Aussagen und Lösungsmethoden der Potentialtheorie können hierauf in analoger Weise übertragen werden.
1.5.4.1 Bilanz- und Transportgleichungen für elektrische Strömungsverteilungen
(i) Ladungsbilanz: Wie bereits in § 1.2.3 diskutiert wurde, erhält man aus (1.1) und
(1.4) die Beziehung:
) = div j +
0 = div(rot H
∂ div D
∂t
= div j +
∂ρ
.
∂t
Die Ladungserhaltungsgleichung
div j +
∂ρ
=0
∂t
(1.108)
bildet die Grundlage für die Theorie elektrischer Strömungen.
(ii) Transportmodell für die beweglichen Ladungsträger
Um ein geschlossenes Gleichungssystem zu erhalten, muss die Stromdichte j durch
die sie treibenden Kräfte ausgedrückt werden. In einem Leiter oder Halbleiter kann
man zumeist in guter Näherung vom Drift-Diffusions-Modell ausgehen.
Wir nehmen an, dass das elektrische Strömungsfeld aus K verschiedenen Sorten
von Ladungsträgern zusammengesetzt ist, welche die spezifische Ladung qα , Beweglichkeit μα und Teilchendichte nα besitzen. Die Trägersorte α trägt dann mit
der Partialstromdichte
− qα Dα ∇nα
j α = |qα |nα μα E
(1.109)
zum gesamten Stromfluss bei. Der erste Term bezeichnet den Driftstrom im elektri (vgl. Vorlesung Elektrizität und Magnetismus §2.2.2) und führt zum
schen Feld E
Ohmschen Gesetz. Dieser Transportmechanismus ist in Metallen dominant. Der
zweite Term bezeichnet den Diffusionsstrom. Dieser fließt immer in Richtung des
negativen Konzentrationsgradienten −∇nα . Seine Intensität ist durch den Diffusionskoeffizienten Dα > 0 gegeben; dieser Zusammenhang wird auch als Ficksches
Diffusionsgesetz bezeichnet. Der Diffusionsstrom ist insbesondere in Halbleiterbauelementen wie Dioden und Bipolartransistoren relevant. In diesem Fall hat man
zwei Trägersorten, nämlich die Leitungselektronen (α = n) und die Defektelektronen (Löcher, α = p).
56
1.5 Das Randwertproblem der Potentialtheorie
Wir nehmen weiterhin an, dass das elektrische Feld keine durch das Induktionsge = − ∂ B induzierten Wirbelfelder enthält und damit keine Wirbelströme
setz rot E
∂t
= 0, und damit ist das E
-Feld ein reines
vorhanden sind. Für ∂∂tB = 0 folgt rot E
Gradientenfeld:
= −∇Φ
E
Damit kann man die Partialstromdichte j α als Summe zweier Gradienten darstellen:
j α = − (|qα |nα μα ∇Φ + qα Dα ∇nα )
(1.110)
Der Diffusionskoeffizient Dα und die Beweglichkeit μα sind über die „Einsteinrelation“ Dα = |qkTα | μα miteinander verknüpft. Mit Hilfe des elektrochemischen Potentials
(oder Quasiferminiveaus)
kT nα
Φα := Φ +
ln
(1.111)
qα
n0
lässt sich daher die Partialstromdichte j α in kompakter Form darstellen als
j α = −σα ∇Φα
(1.112)
wobei σα := |qα |μα nα die spezifische elektrische Leitfähigkeit der Trägersorte α
bezeichnet.
Die Gesamtstromdichte ergibt sich schließlich als
j =
K
j α
(1.113)
qα n α
(1.114)
α=1
und die zugehörige Raumladungsdichte ist
ρ=
K
α=1
(iii) Detaillierte Bilanzgleichungen:
Wie im Abschnitt 1.2.3 (vi) diskutiert wurde, genügen die Teilchen jeder Trägersorte α einer Teilchenbilanzgleichung (vgl. (1.25)):
1
∂nα
= − div j α + Gα
∂t
qα
(α = 1, ..., K)
(1.115)
wobei Gα die Generations-Rekombinationsrate der Spezies α bezeichnet. Man be1
achte, dass j α die Teilchenstromdichte der Spezies α ist. Damit die detaillierqα
ten Bilanzen (1.115) mit der Ladungserhaltungsgleichung (1.108) verträglich sind,
1.5.4 Stationäre Stromverteilung
57
muss wegen (1.113) und (1.114) gelten:
K
∂ρ ∂nα
0 = div j +
div j α + qα
=
∂t α=1
∂t
K
=
K
q α Gα ,
also
α=1
qα G α = 0
(1.116)
α=1
1.5.4.2 Stationäre Strömungsfelder im Drift-Diffusions-Modell
∂nα
= 0. Mit der Stromrelation (1.112) eingesetzt in
∂t
(1.115) erhalten wir ein System partieller Differentialgleichungen für die elektrochemischen Potentiale Φα :
Bei stationären Strömungen gilt
div (σα ∇Φα ) = −qα Gα
(1.117)
das zusammen mit der Poissongleichung für das elektrische Potential Φ
div (∇Φ) = −ρ = −
K
qα n α
(1.118)
α=1
zu lösen ist. Die Trägerkonzentrationen nα werden hierbei mit Hilfe von (1.111) aus
Φα und Φ berechnet, die gesuchten Stromdichten mit Hilfe von (1.112). Das gekoppelte
System von Differentialgleichungen (1.117) und (1.118) ist auf einem Gebiet Ω ⊂ R3
(=Bauelement) mit geeignet gewählten (gemischten) Randbedingungen zu lösen.
1.5.4.3 Stationäre Strömungsfelder im Ohmschen Transportmodell
(i) Dielektrische Relaxation
Den einfachsten Fall stellt ein metallischer Leiter dar, in dem ein rein Ohmscher
Ladungstransport mit nur einer einzigen Trägersorte (Elektronen) erfolgt. Es gilt
also das einfache Ohmsche Gesetz
= −σ∇Φ.
j = σ E
(1.119)
= E
, das Gaußsche Gesetz
Gleichzeitig gelten natürlich die Materialgleichung D
= ρ, sowie die Ladungserhaltungsgleichung (1.108). Ineinander eingesetzt
div D
ergibt sich bei konstant angenommener Leitfähigkeit σ und Permittivität die
Beziehung
σ
σ
∂ρ
= − σ ρ,
D = − div D
= − div j = − div
∂t
58
1.5 Das Randwertproblem der Potentialtheorie
also
∂ρ
σ
σ
=− ρ
mit = constans
(1.120)
∂t
Wird der elektrisch neutrale stationäre Gleichgewichtszustand durch eine lokale Ladungsfluktuation Δρ(t, r ) gestört, so folgt durch zeitliche Integration von
(1.120):
Δρ(t, r ) = Δρ(t0 , r ) exp −
t − t0
τR
(1.121)
wobei
σ
als dielektrische Relaxationszeit bezeichnet wird.
τR :=
(1.122)
Typische Werte für τR sind:
• Metall: τR ≈ 10−15 s = 1 fs
• Halbleiter: τR ≈ 10−12 . . . 10−4 s
• Isolator: τR = 104 . . . 106 s ≈ 10 Tage
(ii) Quasistationäre Näherung
In einem Metall ist die Relaxationszeit so kurz, dass alle zeitlichen Vorgänge, die
für die technische Anwendung von Interesse sind (Schalten, Ladungsverschiebung
etc.), langsam ablaufen im Vergleich zu τR . Deshalb kann man auf der technisch
relevanten Zeitskala ( μs, ns) die Ausbildung einer Raumladung meistens vernachlässigen:
∂ρ
≈0
∂t
(1.123)
Dies nennt man quasistationäre Näherung.
1.5.4.4 Randwertproblem für stationäre Ohmsche Strömungsfelder
Gemäß der Ladungserhaltungsgleichung (1.108) bleibt in der quasistationären Näherung
nur noch das stationäre Strömungsproblem
div j = 0
(1.124)
zu lösen. Mit dem Ansatz (1.119) einer Potentialströmung gelangen wir so zu einer
homogenen Poissongleichung für das elektrische Potential:
div(σ(r )∇Φ) = 0
(1.125)
1.5.5 Korrespondenz
59
r
n
¶W1
Kontakt
¶Wn
r
r
j = -s E
r
div j = 0
W
r
s (r )
¶W2
Abbildung 1.17: Stromführendes Gebiet begrenzt von elektrischen Kontakten und
isolierenden Randstücken
Diese ist auf einem Gebiet Ω ⊂ R3 zu lösen, auf dessen Rand ∂Ω folgende Randbedingungen gestellt werden:
Der Rand ∂Ω enthält potentialgesteuerte Kontakte (Klemmen) ∂Ω1 , ∂Ω2 , ..., ∂ΩN , auf
denen die Potentialwerte
(j = 1, ..., N )
Φ|∂Ωj = Vj
vorgegeben sind. Die übrigen Randflächenstücke sind elektrisch isolierend,
∂Φ
= 0, wobei n die äußere Normale auf ∂Ω bezeichnet. Dies führt auf
d.h. j · n = −σ
∂n
die homogene Neumannsche Randbedingung
⎛
∂Φ
=0
∂n
auf ∂Ω\ ⎝
N
%
⎞
∂Ωj ⎠
j=1
Insgesamt ist also ein gemischtes Randwertproblem zu lösen, wie es bereits im Abschnitt
1.5.2 behandelt wurde (vgl. Gl. (1.80)).
1.5.5 Korrespondenz zwischen Elektrostatik, stationären
elektrischen Strömen, Magnetostatik und stationärem
Wärmefluss
Die feldtheoretische Beschreibung von Problemstellungen in der Elektrostatik, bei stationärem elektrischem Stromfluss, in der Magnetostatik und bei stationärem Wärmefluss
folgt völlig analogen Grundgleichungen (Bilanzgleichungen und gradientengetriebenen
Flussgrößen). Diese Korrespondenzen sind in folgender Tabelle zusammengestellt. Sie
erlauben es, generische mathematische Lösungsmethoden (wie z.B. Lösen der Poisson-
60
1.5 Das Randwertproblem der Potentialtheorie
gleichung) auf jedes der vier genannten Problemfelder in analoger Weise anzuwenden.
Aus der mathematischen Struktur der feldtheorethischen Beschreibung lässt sich eine Netzwerkbeschreibung mit konzentrierten Netzwerkelementen ableiten. Das Ergebnis ist ein Kirchhoffsches Netzwerk mit geeignet gewählten „Across-Größen“ (KnotenPotentialen) und „Through-Größen“ (Zweigströmen), die den Kirchhoffschen Gesetzen
(Knoten- und Maschenregel) genügen. Die in der Tabelle aufgelisteten Korrespondenzen
ermöglichen es, elektrische Netzwerke auf magnetische Kreise, dielektrische Netzwerke
oder thermische Netzwerke in analoger Weise abzubilden und damit die Methoden der
Netzwerktheorie gleichermaßen anzuwenden.
div(σ∇Φel ) = 0
div(∇Φel ) = −ρ
U = RD · ΦD
dielektrisches
Netzwerk
Kirchhoffsches
Netzwerk
A
A
elektrisches
Netzwerk
U = Rel · I
I=
j da
da
D
ΦD =
elektrischer
Strom
dielektrischer
Fluss
lineares Materialgesetz
„Through“-Größe
„Across“-Größe
Netzwerkdarstellung
−
U = Φ+
el − Φel
j = −σ∇Φel
= −∇Φel
D
Flussgröße
−
U = Φ+
el − Φel
= −∇Φel
E
= −∇Φel
E
treibende Kraft
elektrische
Spannung U
=0
rot E
=0
rot E
(Pot)
elektrische
Spannung U
div j = 0
=ρ
div D
(Cont)
(Pot) in (Cont)
)
(j , σ, E
, , E
)
(D
stationäre elekt. Strömungen
Korrespond. Feldgrößen
Kontinuumsdarstellung
Elektrostatik
A
da
B
magnetischer
Kreis
Vm = Rm · ΦB
ΦB =
magnetischer
Fluss
−
Vm = Φ+
mag − Φmag
magnetische
Spannung Vm
div(μ∇Φmag ) = 0
= −μ∇
Φmag
B
= −∇Φmag
H
= j (= 0)
rot H
=0
div B
, μ, H
)
(B
Magnetostatik
A
J Q da
thermisches
Netzwerk
ΔT = Rth · Q̇
Q̇ =
Wärmestrom
ΔT = Theiss − Tkalt
Temperaturgefälle ΔT
div(κ∇T ) = −ΠQ
J Q = −κ∇T
−∇T
rot ∇T = 0
div J Q = ΠQ
(J Q , κ, −∇T )
stationärer Wärmefluss
1.5.5 Korrespondenz
61
63
2 Modellierung elektromagnetischer
Vorgänge in technischen Systemen
mit Kompaktmodellen
2.1 Flusserhaltende Diskretisierung mit Kirchhoffschen
Netzwerken
Für viele technische Anwendungen (Geräte, Schaltungen, ...) ist eine kontinuumstheoretische Beschreibung mit Hilfe der Maxwellschen Feldtheorie viel zu aufwendig, um ihre
Funktion praxisrelevant darzustellen. Stattdessen genügt eine vereinfachte Modellierung
mit sehr viel weniger Zustandsvariablen (typischerweise Klemmenspannungen und Strömen in äquivalenten Netzwerken). Durch eine derartige „Ordnungsreduktion“ dürfen
aber die zugrundeliegenden physikalischen Prinzipien und Gesetze nicht verletzt werden.
So muss beispielsweise eine Netzwerkdarstellung mit Kompaktmodellen für die Netzwerkelemente die Erhaltungssätze für Ladung und Energie exakt erfüllen; man spricht dann
von einer flusserhaltenden Diskretisierung.
2.1.1 Generelle Modellannahmen
Damit eine Systembeschreibung mit Hilfe von Kompaktmodellen in einem äquivalenten
Netzwerk eine physikalische Grundlage hat, müssen einige Voraussetzungen gegeben
sein:
(i) Das technische System besteht aus räumlich begrenzten Funktionsblöcken,
die über wohldefinierte lokalisierte Schnittstellen (z.B. leitende Verbindungen
oder geführte elektromagnetische Felder) miteinander wechselwirken.
(ii) Die elektrischen und magnetischen Felder sind nur quasistationär zeitveränderlich, d.h. sie werden ohne Retardierungseffekt von Klemmenströmen und -spannungen zeitgleich gesteuert. Dies impliziert, dass keine elektromagnetische Wellenausbreitung in und zwischen den Funktionsblöcken stattfindet (Konzentriertheitshypothese). Eine hinreichende Bedingung hierfür ist (vgl. 3. Kapitel):
Wellenlänge der EM-Welle λ Abmessung des Systems d
64
2.1 Flusserhaltende Diskretisierung mit Kirchhoffschen Netzwerken
Rechnet man diese Bedingung mit Hilfe der Beziehung c = λν (Lichtgeschwindigkeit c = 3 × 108 ms ) auf die Frequenz ν der Welle um, so findet man die Werte:
Frequenz ν
50Hz
Wellenlänge λ 6000km
300kHz 100MHz 1GHz
1km
3m
30cm
1THz
0,3 mm
2.1.2 Feldtheoretische Beschreibung der Quasistationarität
(i) Wir nehmen vereinfachend ein Medium mit konstanter Permittivität und Permeabilität μ an. Das elektromagnetische Feld wird in Potentialdarstellung
= −∇Φ − ∂ A
und B
= rot A
mit Coulombeichung div A
= 0 dargestellt
E
∂t
(vgl. Abs. 1.3.2):
Dann gilt (vgl. (1.44) und (1.45)):
=ρ
div D
= j + ∂ D
rot H
∂t
ρ
⇒
ΔΦ = −
⇒
2
− μ ∂ A = −μ j − ∂ (∇Φ)
ΔA
∂t2
∂t
(2.1)
(2.2)
Die Ausbildung elektromagnetischer Wellen wird unterdrückt, indem in Gl. (2.2)
∂2 der Term μ ∂t
2 A = 0 gesetzt wird. Dies entspricht einer Näherung des Verschiebungsstromes
⎡
⎤
∂D
∂
∂
∂2A
⎦ ≈ −
= − ⎣ (∇Φ) +
(∇Φ)
2
∂t
∂t
∂t
∂t
(2.3)
d.h. der magnetisch induzierte Anteil wird vernachlässigt!
)
(ii) Als Konsequenz dieser Näherung genügen die elektromagnetischen Potentiale (Φ, A
nunmehr den Bestimmungsgleichungen
1
ΔΦ(r , t) = − ρ(r , t)
#
(2.4)
$
(r , t) = −μ j (r , t) − ∂ (∇Φ(r , t))
ΔA
∂t
(2.5)
Dies bedeutet:
) und damit (E
,B
) sind nur noch vom momentanen zeitlichen Wert
(Φ, A
der Quellgrößen ρ(r , t) und j (r , t) (sowie der Randwerte) abhängig
⇒ alle Feldgrößen sind quasistationär!
2.1.3 Synthese von Netzwerkmodellen aus funktionalen Blöcken
65
(iii) Die quasistationäre Näherung (2.4)/(2.5) ist verträglich mit dem Ladungserhal = 0 gilt:
tungssatz. Denn wegen der Coulomb-Eichung div A
) = div(ΔA
) = −μ div j − ∂ (ΔΦ) = −μ div j + ∂ρ ,
0 = Δ(div A
∂t
∂t
also
div j +
∂ρ
=0
∂t
(2.6)
2.1.3 Synthese von Netzwerkmodellen aus funktionalen Blöcken
Ziel der Kompaktmodellierung (oder Makromodellierung) ist es, eine feldtheoretisch
beschriebene Struktur mit realer dreidimensionaler Geometrie durch ein äquivalentes
Kirchhoffsches Netzwerk so darzustellen, dass die Funktion der Struktur in ihrem Klemmenverhalten realitätsgetreu wiedergegeben wird.
Reale 3D
Struktur
KompaktModellierung
Kontinuumsmodelle
Kirchhoffsches Netzwerk
Abbildung 2.1: Kompaktmodellierung
Hierzu sind die im Folgenden beschriebenen Voraussetzungen nötig.
2.1.3.1 Funktionale Blöcke
Wir nehmen an, dass sich das zu modellierende System aus räumlich begrenzten funktionalen Blöcken aufbauen lässt, die als mehrpolige elektrische Bauelemente dargestellt werden können.
Das bedeutet:
• Ladungsaustausch (Stromfluss) mit anderen Bauelementen erfolgt über disjunkte,
lokalisierte Randflächen A1 , .., AN (N ≥ 2) (= Kontakte oder Klemmen)
• Kontakte sind Äquipotentialflächen (-gebiete). Daher ist es sinnvoll, Klemmenpotentiale Φk = Φ|Ak (k = 1, ..., N ) zu definieren.
66
2.1 Flusserhaltende Diskretisierung mit Kirchhoffschen Netzwerken
• Das Bauelement als Ganzes ist elektrisch neutral (d.h. Gesamtladung Q = 0).
Hieraus folgt:
0=
N dQ ∂ρ 3
j · da
=
d r = − div j d3 r = − j · da = −
dt
∂t
k=1
B
B
∂B
Ak
Die (auslaufend gerichteten) Klemmenströme
Ik :=
j · da
(2.7)
Ak
erfüllen daher die integrale Stromerhaltungsgleichung
N
Ik = 0
(2.8)
k=1
• Das Klemmenverhalten der Bauelemente ist darstellbar in Form eines differentialalgebraischen Gleichungssystems („Kompaktmodell“)
˙ =0
F (U , I, U̇ , I)
(2.9)
Hierbei bedeuten
U = (Φ1 − Φ0 , Φ2 − Φ0 , ..., ΦN − Φ0 ) Klemmenspannungen
Φ0 = Bezugspotential („Nullpunkt“)
I = (I1 , I2 , ...IN ) Klemmenströme
Derartige Kompaktmodelle sind prinzipiell aus einem Kontinuumsmodell ableitbar.
Typische Beispiele sind:
– Resistiver Zweipol (Eintor):
Kennlinie I1 = f (U12 ) mit U12 = Φ1 − Φ2
– Kapazitives Eintor:
I1 = C(U12 ) ·
dU12
dt
(nichtlinearer Kondensator)
– Induktives Eintor:
U12 = L(I1 ) ·
dI1
dt
(nichtlineare Induktivität)
2.1.3 Synthese von Netzwerkmodellen aus funktionalen Blöcken
67
2.1.3.2 Erstellung eines Kirchhoffschen Netzwerkes
(i) Die elektrische Verknüpfung der Kompaktmodelle der Bauelemente zu einem Systemmodell (Schaltung bzw. Netzwerk) geschieht über Knoten und Zweige.
r
F (r ) = F K
r
F (r ) = F K 2
r
F (r ) = F K1
F K2
r
j
A
ÑF
K2
I (K 2 , K )
B
FK
ÑF
K
IK
K1
I (K , K1 )
A
ÑF
F K1
B
Knoten K
Abbildung 2.2: Übergang vom Kontinuumsmodell zu einer diskreten Netzwerkbeschreibung
Auch hierfür müssen gewisse Voraussetzungen in der realen Bauelementstruktur
erfüllt sein.
(ii) Erforderliche Eigenschaften von (physikalischen) Knoten:
• Ein Knoten ist eine ideal leitende Verbindung zwischen M Kontakten. Für
einen „echten“ Knoten mit Stromverzweigung gilt M ≥ 3. Ein Knoten ist ein
Äquipotentialgebiet; daher kann ihm ein definierter Potentialwert ΦK zugeordnet werden.
Notation: K := Menge aller Knoten im Netzwerk
• Knoten sind zumeist ladungsneutral. Für die auf einem Knoten gespeicherte
Ladung QK gilt: QK = 0 für K ∈ K
• Eine Ausnahme bilden „speichernde Knoten“ (= Elektroden) in mehrpoligen
kapazitiven Speicherelementen. Diese können eine Ladung QK = 0 tragen
(vgl. Abs. 2.2), wenn gleichzeitig andere Elektroden die Gegenladung tragen:
K∈K
QK = 0
(2.10)
68
2.1 Flusserhaltende Diskretisierung mit Kirchhoffschen Netzwerken
(iii) Erforderliche Eigenschaften von Zweigen:
• Gerichtete Zweige (K1 , K2 ) ∈ K × K bezeichnen einen möglichen Strompfad
vom Knoten K1 zum Knoten K2 .
Notation: Z := Menge aller Zweige im Netzwerk ⊂ K × K
• Der in Bauelementen und Verdrahtung räumlich verteilt fließende Strom j (r , t)
wird als linienförmig konzentrierter, gerichteter Zweigstrom I(K1 , K2 ) flusserhaltend zwischen den Knoten K1 und K2 transportiert. Dies ist eine Konsequenz des Klemmenstrom-Erhaltungssatzes (2.8) und der Kirchhoffschen
Knotenregel.
• Jedem Zweig (K1 , K2 ) ∈ Z muss man eine am Zweig anliegende gerichtete
Zweigspannung
K2
U (K1 , K2 ) :=
· dr
E
(2.11)
K1
neben dem
= −∇Φ − ∂ A
zuordnen können. Da das elektrische Feld E
∂t
ind = − ∂ A
Gradientenfeld −∇Φ auch das magnetisch induzierte Wirbelfel E
∂t
enthält, hängt die induzierte Spannung
K2
Uind (K1 , K2 ) :=
ind · dr = −
E
K1
K2
K1
∂A
· dr
∂t
(2.12)
von der Wahl des physikalischen Integrationsweges von K1 nach K2 ab
(= Strompfad des Zweigstromes). Nur wenn dieser eindeutig festliegt (z.B.
linienförmige Leiterschleife von K1 nach K2 ), ist Uind (K1 , K2 ) eindeutig definiert und ein Netzwerk-Ansatz zulässig. In diesem Fall gilt:
U (K1 , K2 ) = −
K2
K1
∇Φ · dr −
K2
K1
∂A
· dr
∂t
(2.13)
= ΦK1 − ΦK2 + Uind (K1 , K2 )
Ohne Induktionseffekt gilt die vereinfachte Darstellung
U (K1 , K2 ) = ΦK1 − ΦK2
(2.14)
2.1.3 Synthese von Netzwerkmodellen aus funktionalen Blöcken
69
2.1.3.3 Kirchhoffsche Knotenregel
Für einen Knoten K ∈ K sei N (K) = {K ∈ K | (K, K ) ∈ Z} die Menge seiner
Nachbarknoten im Netzwerk.
A (K , K1 )
I (K , K 2 )
I (K , K1 )
A (K , K 2 )
K
I (K , K 3 )
A (K , K N )
I (K , K N )
A (K , K 3 )
Abbildung 2.3: Realer physikalischer Knoten in einem Netzwerk
Wird der reale physikalische Knoten K in ein Kontrollvolumen V eingeschlossen, so
strömen durch dessen Hüllfläche ∂V die Zweigströme I(K, K ) zu den Nachbarknoten
K ∈ N (K) durch disjunkte Teilflächenstücke A(K, K ) ⊂ ∂V :
I(K, K ) =
j · n da (n = äußere Normale)
(2.15)
A(K,K )
Bei ladungsspeichernden Knoten ist
QK (t) =
ρ (r , t) d3 r
V
die im Knoten befindliche elektrische Ladung.
∂ρ
= 0 folgt:
Wegen des Ladungserhaltungssatzes div j +
∂t
dQK
∂ρ 3
=
d r = − div j d3 r = − j · da = −
dt
∂t
K ∈N (K)
V
V
j · da = −
A(K,K )
∂V
I(K, K ),
K ∈N (K)
also
I(K, K ) = −
K ∈N (K)
dQK
dt
(Kirchhoffsche Knotenregel für speichernde Knoten)
(2.16)
70
2.1 Flusserhaltende Diskretisierung mit Kirchhoffschen Netzwerken
Bei nichtspeichernden Knoten gilt die vereinfachte Version:
I(K, K ) = 0
(2.17)
K ∈N (K)
(Kirchhoffsche Knotenregel für nichtspeichernde Knoten)
2.1.3.4 Kirchhoffsche Maschenregel
Eine Masche (oder Schleife) M ist eine geschlossene Knotenfolge längs Zweigen im
Netzwerk (Abb. 2.4):
M = {(K0 , K1 ), (K1 , K2 ), ..., (KN −1 , KN ), (KN , K0 )}
K2
X
X
U (K 2 K 3 )
K1
M
X
X
K 0 º K N +1
X
K3
KN
Abbildung 2.4: Masche in einem Kirchhoffschen Netzwerk
Im realen physikalischen System entspricht einer Masche eine geschlossene Kurve, die
längs physikalischer Strompfade (=Zweige) über die physikalischen Knoten führt. Zum
= −∇Φ − ∂ A
trägt gegebenenfalls auch das
elektrischen Feld entlang der Masche E
∂t
bei.
ind = − ∂ A
magnetisch induzierte Wirbelfeld E
∂t
entlang der physikalischen Masche ergibt abstrakt im NetzDas Linienintegral über E
werk:
· dr =
E
M
K
N j+1
N
j=0 K
j
j=0
· dr =
E
U (Kj , Kj+1 ),
wobei KN +1 := K0 gesetzt wird.
Andererseits gilt in der realen Struktur:
M
· dr = −
E
M
∇Φ · dr +
M
ind · dr = 0 + Uind (M)
E
71
mit der in der Masche induzierten Spannung
Uind (M) =
M
⎛
⎞
ind · dr = − d ⎝ A
· dr ⎠
E
dt
(2.18)
M
Damit gilt:
N
U (Kj , Kj+1 ) = Uind (M)
(2.19)
j=0
(Kirchhoffsche Maschenregel mit eingeprägter (induktiver) Spannungsquelle)
NB! (2.19) ist nur dann sinnvoll in einem Netzwerk anwendbar, wenn Uind (M) durch konzentrierte Bauelemente (wie z.B. Spulen) erzeugt wird, deren Verhalten allein durch die
Zweigströme I(K, K ) und Zweigspannungen U (K, K ) im Netzwerk modelliert werden
kann (vgl. Abs. 2.3).
2.2 Kapazitive Speicherelemente
Das Konzept der Kompaktmodellierung soll im Folgenden an energiespeichernden Bauelementen wie Kondensator- oder Spulenanordnungen konkret angewandt werden.
2.2.1 Kondensatoranordnungen (Geometrie und Randwertproblem)
(i) Randwertproblem:
Wir betrachten eine Mehrelektroden-Kondensatoranordnung wie in §1.5.2.1 (iii)
dargestellt: Leitende Gebiete Ωl (l = 0, . . . , N ) schließen ein dielektrisches Gebiet
Ω ein. ∂Ωl sind Äquipotentialflächen mit den Potentialwerten Vl .
Das Dielektrikum zwischen den Elektroden ∂Ωl sei elektrisch neutral, d.h. es trägt
keine Raumladung: ρ = 0. Die Aufgabe besteht darin, zu gegebenen Potentialwerten (V0 , V1 , . . . , VN ) ∈ RN +1 auf den Elektroden zunächst das elektrische Potential
= −∇Φ im Dielektrikum Ω zu bestimΦ(r ) und hieraus das elektrische Feld E
men, um dann die auf den Elektroden befindlichen Ladungen (Q0 , Q1 , . . . , QN )
zu berechnen. Als erster Schritt ist also das bereits in (1.67) formulierte Randwertproblem zu lösen:
[V-RWP]
div(∇Φ) = 0 in Ω und
Φ|∂Ωl = Vl
(l = 0, 1, . . . , N ) (vgl. (1.67))
72
2.2 Kapazitive Speicherelemente
W1
r
n
e
r
n
¶W2
¶W N
WN
r
n
¶W1
W2
r
n
Abbildung 2.5: Mehrelektroden-Kondensatoranordnung
(ii) Konstruktion des Potentials aus Grundlösungen:
Die Lösung zu [V-RWP] lässt sich als Linearkombination von N +1 Grundlösungen
Φ0 (r ), Φ1 (r ), . . . , ΦN (r ) darstellen, die folgendermaßen definiert sind:
div(∇Φk ) = 0 in Ω und Φk |∂Ωl = δkl =
⎧
⎨1
⎩0
k=l
k = l
(2.20)
Die Lösung Φ(r ) zu [V-RWP] mit der Potentialvorgabe (V0 , V1 , . . . , VN ) hat dann
die Form
Φ(r ) =
N
(2.21)
Vk Φk (r )
k=0
Beweis: div(∇Φ) = div ∇
N
k=0
Φ|∂Ωl =
N
k=0
Vk Φk |∂Ωl = Vl
δkl
Vk Φk
=
N
k=0
Vk div ( ∇Φk ) = 0
0
q.e.d.
2.2.2 Maxwellsche Kapazitätsmatrix
73
2.2.2 Maxwellsche Kapazitätsmatrix
2.2.2.1 Beziehung zwischen Elektrodenladungen und -potentialen
(i) Die auf der Elektrode ∂Ωk befindliche Ladung Qk lässt sich mit dem Gaußschen
Satz folgendermaßen aus Φ(r ) berechnen:
· n da = −
D
Qk =
∂Ωk
n · ∇Φ da = −
N
Vl
l=0
∂Ωk
n · ∇Φl da =
∂Ωk
=: −Ckl
N
Ckl Vl
l=0
Man beachte, dass n hierbei die von Ωk ins Innere von Ω weisende Oberflächennormale auf ∂Ωk bezeichnet (vgl. Abb. 2.5). Wir erhalten somit eine lineare Beziehung
zwischen den Elektrodenladungen und -potentialen:
Qk =
N
(2.22)
Ckl Vl
l=0
wobei
Ckl := −
n · ∇Φl da (k, l = 0, . . . , N )
(2.23)
∂Ωk
als Maxwellsche Kapazitätskoeffizienten bezeichnet werden. Diese hängen offenkundig nur von der Permittivität und der Geometrie der Elektrodenanordnung
ab.
(ii) Die Kapazitätskoeffizienten Ckl lassen sich auf eine einfachere, symmetrische Form
bringen:
Ckl = −
∇Φl · n da =
j=0 ∂Ω
j
∂Ωk
=
N
div(Φk ∇Φl ) d r =
Ω
3
Φk |∂Ωj ∇Φl · (−n ) da =
δkj
∇Φk ∇Φl d r +
3
Ω
Ω
da
Φk ∇Φl · da
∂Ω
Φk div( ∇Φl ) d3 r
=0
wobei hier da = −n da das nach außen orientierte Oberflächenelement des Gebietes
Ω darstellt.
Wir erhalten also
Ckl =
Ω
∇Φk ∇Φl d3 r
(2.24)
74
2.2 Kapazitive Speicherelemente
Offenkundig ist die Matrix Ckl symmetrisch:
(2.25)
Ckl = Clk
2.2.2.2 Darstellung der gespeicherten elektrischen Energie
(i) Mit Hilfe der Kapazitätskoeffizienten Ckl lässt sich die in einer Kondensatoranordnung gespeicherte elektrische Energie Wel durch die Klemmenpotentiale Vl ausdrücken.
Nach (1.15) gilt:
1
Wel =
2
=
1
2
E
d3 r = 1
E
2
Ω
N
N k=0 l=0
Vk
Ω
N N 1 ∇Φ ∇Φ d r =
Vk ∇Φk ∇Φl Vl d3 r
2 k=0 l=0
(2.21)
3
Ω
∇Φk ∇Φl d3 r Vl =
Ω
N
N 1 2
Vk Ckl Vl
k=0 l=0
Die gespeicherte Energie ist somit ein quadratischer Ausdruck der Klemmenpotentiale:
Wel =
N
1 1
Vl Clk Vk = V T C V
2 k,l=0
2
mit der Maxwellschen Kapazitätsmatrix
⎛
⎜ C00
⎜
⎜
⎜ C10
C = (Ckl ) = ⎜
⎜ .
⎜ ..
⎜
⎝
C01
···
C11
..
.
···
..
.
⎞
C0N ⎟
CN 0 CN 1 · · · CN N
und dem Vektor der Klemmenpotentiale
⎛
⎞
⎜ V0 ⎟
⎜ ⎟
⎜ ⎟
⎜ V1 ⎟
⎟
V := ⎜
⎜ . ⎟
⎜ .. ⎟
⎜ ⎟
⎝ ⎠
VN
⎟
C1N ⎟
⎟
⎟
.. ⎟
. ⎟
⎟
⎠
(2.26)
2.2.2 Maxwellsche Kapazitätsmatrix
75
(ii) Die Energie Wel ist stets positiv: Wel ≥ 0. Daher ist die (wegen (2.25) symmetrische) Kapazitätsmatrix C positiv semi-definit:
C = C T und V T C V ≥ 0 ∀ V ∈ RN +1
(iii) Fasst man Wel als Funktion der unabhängigen Variablen V = (V0 , V1 , . . . , VN )T
auf, so folgt aus (2.26):
N
N
∂Wel
1 =
Ckl Vl +
Vl Clk
∂Vk
2 l=0
l=0
∂Wel
= Qk
∂Vk
bzw.
(2.25)
=
N
(2.22)
Ckl Vl = Qk
l=0
∂Wel
=Q
∂V
(2.27)
mit dem Vektor der Elektrodenladungen
⎛
⎞
⎜ Q0 ⎟
⎜
⎟
⎜
⎟
⎜ Q1 ⎟
⎜
Q := ⎜ . ⎟
⎟
⎜ .. ⎟
⎜
⎟
⎝
⎠
QN
Die lineare Beziehung zwischen Q und V (2.22) lautet dann in Matrixschreibweise
Q=CV
(2.28)
Differenziert man (2.27) ein weiteres Mal nach V , so erhält man
∂ 2 Wel
= Ckl
∂Vk ∂Vl
bzw.
∂ 2 Wel
=C
∂V ∂V
(2.29)
Ist die Funktion Wel = Wel (V ) bekannt, so kann man also aus (2.29) die Maxwellsche Kapazitätsmatrix durch zweimaliges Differenzieren nach V bestimmen.
(r ) das dazugehörige elektrische Potential
(iv) Da für ein gegebenes elektrisches Feld E
Φ(r ) nur bis auf eine Konstante c ∈ R eindeutig bestimmt ist, erzeugen die Po -Feld im
tentialvorgaben V und V + c e mit e := (1, 1, . . . , 1)T ∈ RN +1 dasselbe E
Dielektrikum Ω und damit dieselben Elektrodenladungen Q. Es muss also gelten:
Q = C V = C(V + c e) = C V + c C e
76
2.2 Kapazitive Speicherelemente
Hieraus folgt:
Ce=0
N
bzw.
Ckl = 0
(2.30)
l=0
(d.h. alle Zeilensummen von C sind Null.)
Wegen der Symmetrie C = C T gilt dann auch
eT C = 0
bzw.
N
Ckl = 0
(2.31)
k=0
(d.h. alle Spaltensummen von C sind Null.)
Hieraus ergibt sich als wichtige Konsequenz für die Gesamtladung Qtot =
N
Qk
k=0
der Kondensatoranordnung:
Qtot =
N
Qk = eT Q = eT C V = 0
k=0
=0
also
N
Qk = 0
(2.32)
k=0
Dies ist die Lösbarkeitsvoraussetzung des zum Randwertproblem [V-RWP] dualen
Randwertproblems [Q-RWP] (vgl. (1.70)), bei dem die Elektrodenladungen Q statt
V als unabhängige Daten vorgegeben werden.
(v) Es ist instruktiv, den einfachsten Fall eines Kondensators mit zwei Elektroden
(N = 1) zu betrachten. Wegen (2.30) und (2.31) hat die Maxwellsche Kapazitätsmatrix die Gestalt
⎛
⎞
⎜ C
C=⎝
−C
−C ⎟
C
⎠
mit C = C00 > 0
(2.33)
Die gespeicherte Energie ergibt sich zu
1
Wel = (V0 CV0 + V1 CV1 − V1 CV0 − V0 CV1 )
2
1
1
= (V0 − V1 )C(V0 − V1 ) = CU 2
2
2
wobei U := V0 −V1 die elektrische Spannung zwischen den zwei Elektroden bezeich-
2.2.2 Maxwellsche Kapazitätsmatrix
77
net. Dies ist die üblicherweise verwendete Darstellung. Für die Elektrodenladungen
gilt:
Q0 = C(V0 − V1 ) = C · U
Q1 = C(V1 − V0 ) = −C · U
(vi) Die Grundlösungen Φ0 (r ), Φ1 (r ), . . . , ΦN (r ) sind nicht linear unabhängig. Vielmehr erfüllen sie folgende Summenregel:
Das [V-RWP] mit V = e hat die Lösung Φ(r ) ≡ 1. Hieraus folgt:
1 = Φ(r ) =
N
k=0
Vk Φk (r ) =
N
Φk (r )
k=0
1
Also gilt mit (2.21)
N
Φk (r ) = 1
k=0
bzw. Φ0 (r ) = 1 −
N
(2.34)
Φk (r )
k=1
Die Funktionen Φ1 (r ), Φ2 (r ), . . . , ΦN (r ) bilden hingegen eine Basis des (affinen)
Lösungsraumes. Für die Potentialvorgabe V ∈ RN +1 lautet das zugehörige Potential:
Φ(r ) = V0 +
N
(Vk − V0 )Φk (r )
(2.35)
k=1
Dabei ist Uk,0 = Vk − V0 die Spannung zwischen ∂Ωk und ∂Ω0 , und V0 kann als
Referenzwert für das Potential betrachtet werden.
(vii) Wie Gl.(2.30) und (2.31) zeigen, ist die Kapazitätsmatrix C nicht invertierbar
(d.h. man kann aus den Ladungen Q nicht die Elektrodenpotentiale V eindeutig bestimmen). Diese Unbestimmtheit lässt sich aber beseitigen, indem man in
Übereinstimmung mit Gl. (2.35) die Spannungen Ul,0 = Vl − V0 als vorgegebene Klemmengrößen betrachtet (bei festgehaltenem Referenzwert V0 ). Für die Ladungsberechnung erhält man so die Beziehung
Q = C(V − V0 e)
⇒
Qk =
N
l=0
Ckl
(Vl − V0 )
= 0 für l = 0
78
2.2 Kapazitive Speicherelemente
und damit
Qk =
N
Ckl Ul,0
(2.36)
(k = 1, . . . , N )
l=1
Führt man die um die nullte Zeile und Spalte abgeschnittene reduzierte Kapazitätsmatrix
⎛
⎞
C
C
.
.
.
C
11
12
1N
⎜
⎟
⎜
⎜
⎜ C21
C=⎜
⎜ .
⎜ ..
⎜
⎝
⎟
C22
..
.
C2N ⎟
⎟
⎟
.. ⎟
. ⎟
(2.37)
⎟
⎠
CN 1 CN 2 . . . CN N
sowie die reduzierten Ladungs- und Spannungsvektoren
⎛
⎞
⎜ Q1 ⎟
⎜
. ⎟
⎟
=⎜
⎜ .. ⎟
Q
⎜
⎝
QN
⎟
⎠
⎛
⎞
⎛
⎞
⎜ U1,0 ⎟
⎜ V1 − V0 ⎟
⎜
⎟
⎜
⎟
..
⎜ . ⎟
⎜
⎟
⎟
und U 0 = ⎜ .. ⎟ = ⎜
.
⎜
⎝
UN,0
⎟
⎠
⎜
⎝
VN − V0
⎟
⎠
(2.38)
ein, so lautet (2.36) nun
=C
U
Q
0
(2.39)
mit der invertierbaren Matrix C.
Die gespeicherte Energie Wel lässt sich ebenfalls durch die reduzierte Kapazitätsmatrix C und die Klemmenspannung U 0 ausdrücken:
1 T
1
1
V C V = (V − V0 e)T C V = (V − V0 e)T Q
2
2
2
N
N
1
1
1
= 1 UT C
U
=
(Vl − V0 ) Ql =
Ul,0 Ql = U T0 Q
0
2 l=0
2 l=1
2
2 0
Wel =
Also gilt:
Wel =
N
1 T
1 Uk,0 Ckl Ul,0
U0 C U0 =
2
2 k,l=1
(2.40)
N
1 T
1 Uk,0 Qk
U0 Q =
2
2 k=1
(2.41)
und
Wel =
2.2.2 Maxwellsche Kapazitätsmatrix
79
2.2.2.3 Teilkapazitätskoeffizienten
Eine Mehrelektroden-Kondensatoranordnung kann auch als Netzwerk von kapazitiven
Zweipolen (Eintoren) dargestellt werden (Abb. 2.6). Hierzu führt man die elektrischen
Spannungen Ukl := Vk − Vl zwischen den Elektroden ∂Ωk und ∂Ωl ein.
Abbildung 2.6: Teilkapazitätskoeffizienten
Es gilt dann:
N
Ckl Ukl =
l=0
N
Ckl Vk −
l=0
N
Ckl Vl = −Qk
l=0
=0
Man definiert nun die Teilkapazitätskoeffizienten als
Kkl := −Ckl
(k, l = 0, . . . , N ; nur k = l wird benötigt)
(2.42)
und erhält
Qk =
N
l=0
l=k
Kkl Ukl
(2.43)
Anschaulich bedeutet diese Gleichung, dass die auf dem Netzwerkknoten k befindliche
Ladung Qk in N additive Teilladungen Qkl = Kkl Ukl (l = 0, . . . , N ; l = k) aufgespalten wird; jede Teilladung Qkl wird einem zweipoligen Kondensator mit der Kapazität
Kkl = −Ckl zugeordnet, der zwischen die Knoten k und l als Zweigelement plaziert
wird.
80
2.3 Induktive Speicherelemente
2.3 Induktive Speicherelemente
2.3.1 Spulenanordnungen (Geometrie und Topologie)
(i) Grundkonfiguration:
Induktive Bauelemente bestehen typischerweise aus fast geschlossenen stromdurchflossenen Leiterschleifen, die ein zeitveränderliches Magnetfeld erzeugen. Dieses
wirkt über das Induktionsgesetz auf die Leiterschleifen zurück, in denen es eine elektrische Spannung induziert, die wiederum einen induzierten Strom treiben
kann. Um die magnetische Feldenergie zu konzentrieren, platziert man im Inneren der Leiterschleife (meist Spulen mit vielen Windungen) ein magnetisierbares
Material mit großer Permeabilität.
r
da1
r
r1 ( s )
S1
..
r
t1
...
i1 (t )
-u 1(t )
r
t1 ( s ) =
r
dr1
ds
CN = ¶S N
C2 = ¶S 2
C1 = ¶S1
i2 (t )
-u N (t )
-u 2(t )
i N (t )
Abbildung 2.7: Spulenanordnung
Im Folgenden betrachten wir daher N ruhende, drahtförmige Leiterschleifen
Ck (k = 1, 2, ..., N ), welche orientierte Flächen Sk einschließen (Ck = ∂Sk ) und
durch die ein zeitveränderlicher Strom ik (t) fließt. Dieser wird einerseits von der
Speisespannung uk (t) an den Klemmen der Schleife Ck getrieben, andererseits aber
von der induzierten Spannung uind,k (t). Hat die Schleife Ck den ohmschen Innenwiderstand rk , so gilt:
uk (t) = −uind,k (t) + rk ik (t)
(2.44)
Um die Orientierung der Zählpfeile von uk (t) und uind,k (t) zu verstehen, betrachten
wir zwei spezielle Situationen.
(ii) Spule als Generator:
Wir betrachten eine ideale (d.h. widerstandslose) Spule mit w Windungen, deren
Inneres von einem homogenen zeitveränderlichen Magnetfeld
(t) = B(t)e z
B
erfüllt ist. Die Spule stellt eine orientierte Leiterschleife C dar, die eine orientierte “wendeltreppenförmige” Fläche S einschließt, welche durch “Verkettung” von
w gleichartigen Flächenstücken S0 entsteht, die jeweils einer einfachen Spulenwindung entsprechen. Wir nehmen an, dass die orientierte Flächennormale von S0 und
2.3.1 Spulenanordnungen (Geometrie und Topologie)
81
in dieselbe Richtung weisen; dann wird jede Windungsfläche S0 vom magnetiB
schen Fluss
· da = |S0 | · B(t)
B
Φ(S0 ) =
S0
durchsetzt, wobei |S0 | den Flächeninhalt von S0 bezeichnet.
r
B
i
i
w Windungen
RL
RL
uind
uind
G
i
Abbildung 2.8: Spule als Generator
Nach dem Induktionsgesetz wird in der Spule eine elektrische Spannung uind (t)
induziert:
d
dB
d
(2.45)
uind (t) = − Φ(S) = −w Φ(S0 ) = −w|S0 |
dt
dt
dt
Hierbei ist der Zählpfeil der induzierten Spannung an den Klemmen der Spule
gleichorientiert mit dem Umlaufsinn der Leiterschleife C und damit auch mit dem
Zählpfeil des Spulenstroms I, der fließt, wenn die Spule als Generator zum Betreiben einer äußeren Last RL verwendet wird. Die Spule fungiert in dieser Situation
als (ideale) Spannungsquelle mit der Ausgangsspannung uind (t) (siehe Abb. 2.8).
(iii) Spule als Verbraucher:
Schließt man an die Klemmen der oben betrachteten (widerstandslosen) Spule eine
äußere Spannungsquelle mit zeitveränderlicher Spannung u(t) an, so fließt durch
die Spule ein Strom i(t). Behält man die Zählrichtung des Stromes i(t) in der Spule
bei, so muss der Zählpfeil von u(t) gegengleich zu dem von uind (t) sein, weil die
Spule nun als Verbraucher fungiert (siehe Abb. 2.9): u(t) = −uind (t).
r
B
i
i
u
u
u
ind
Abbildung 2.9: Spule als Verbraucher
L
82
2.3 Induktive Speicherelemente
Der Spulenstrom i(t) erzeugt nach dem Ampèreschen Gesetz (1.4) im Spuleninneren ein Magnetfeld B(t) proportional zu i(t):
B(t) = c · i(t)
mit c = constans
wobei i(t) von u(t) getrieben wird. Eingesetzt in die Beziehung (2.45) erhalten wir
u(t) = −uind (t) =
d
dB
di
Φ(S) = w|S0 |
= w|S0 |c ·
dt
dt
dt
=: L
oder in Kurzform
u(t) = L
di
dt
(2.46)
Die Größe L heißt (Eigen-)Induktivität der Spule und charakterisiert ihr Klemmenverhalten im Sinne eines Kompaktmodells.
2.3.2 Induktionskoeffizienten
(i) Um das Klemmenverhalten einer Spulenanordnung zu beschreiben, machen wir
folgende vereinfachende Modellannahmen:
a) Alle Spulen sind ortsfest, der geometrische Aufbau ist starr und zeitunabhängig. Die induzierten Spannungen werden in diesem Fall allein von der
-Feldes verursacht (Ruheinduktion).
Zeitableitung des B
b) Die Spulenströme ik (t) ändern sich mit der Zeit so langsam (d.h. niederfrequent), dass die quasistationäre Näherung angewendet werden darf (vgl.
Abs. 2.1.2). Die Antennenwirkung von Spulen und Wellenausbreitung werden
vernachlässigt. Die in den Spulen Ck fließenden Stromdichten jk (r , t) erzeugen
k (r , t), die unter Vernachlässigung des Verschiebungsstroms
Magnetfelder H
Lösungen der stationären Ampèreschen Beziehung
k (r , t) = jk (r , t)
rot H
(2.47)
sind. Damit sind das Magnetfeld und die hiervon induzierten Spannungen
zeitgleich mit den erzeugenden Strömen verknüpft (keine Retardierungseffekte).
2.3.2 Induktionskoeffizienten
83
k (r , t)
(ii) Stellt man das von der Spulenstromdichte jk (r , t) erzeugte Magnetfeld H
k = 1 rot A
k , so genügt (in Coulomb k (r , t) dar gemäß H
über ein Vektorpotential A
μ
k = 0) das Vektorpotential der (vektoriellen) Poissongleichung
Eichung div A
k (r , t) = −μjk (r , t)
ΔA
(2.48)
Diese Gleichung entspricht Gl. (2.5), wenn Raumladungseffekte vernachlässigt werden.
Falls sich die Spulenanordnung (näherungsweise) in einem unendlich ausgedehnten
Medium mit Permeabilität μ befindet, kann man die Poissongleichung (2.48) mit
Hilfe der Vakuum-Greenfunktion (vgl. Abs. 1.5.3, Gl. (1.100))
G(r , r ) =
1
1
4π |r − r |
lösen und erhält:
jk (r , t) 3 k (r , t) = μ
dr
A
4π R3 |r − r |
(2.49)
(iii) Die dreidimensionalen Stromdichten jk (r , t) müssen nun durch die Spulenströme
ik (t) und die Geometrie der Leiterschleifen Ck ausgedrückt werden. Hierzu stellen
wir den linienförmigen Leiter Ck (“Draht”) durch eine Ortskurve mit Parametrisierung s → rk (s) dar, wobei s die Bogenlänge ist. Senkrecht zum Einheitstangentendrk
vektor tk (s) :=
habe der Draht eine überall konstante Querschnittsfläche ak ,
ds
die vom Strom ik (t) homogen durchflossen wird; der Stromdichtevektor jk weise
hierbei in die Richtung des Tangentialvektors tk (siehe Abb. 2.10).
r
r drk
tk =
ds
r r
jk (r )
Segment von Ck
Abbildung 2.10: Liniensegment eines drahtförmigen Leiters
Die Stromdichte jk lässt sich dann als Linienstromdichte auf Ck darstellen:
jk (rk (s), t) = tk (s) ik (t)
ak
84
2.3 Induktive Speicherelemente
Die Volumenintegration in (2.49) führen wir so aus, dass wir bei festem r (s) erst
über den Drahtquerschnitt (mit differentiellem Flächenelement da) integrieren und
anschließend über die Kurve Ck :
jk (r , t) d3 r = jk (r , t) da ds = ik (t) da tk ds
ak
(2.50)
Da tk ds = dsk das vektorielle Linienelement entlang der Kurve Ck ist, erhalten
wir aus (2.49) die Beziehung
ds
k (r , t) = μ
A
ik (t).
4π Ck |r − s |
(2.51)
Man beachte, dass somit das von der Spule Ck erzeugte Magnetfeld als Produkt
einer Ortsfunktion und des Spulenstroms dargestellt werden kann. Hierauf basiert
das nun folgende Konzept der Induktivitätskoeffizienten.
Das von allen Spulen insgesamt erzeugte Vektorpotential ergibt sich aus dem Superpositionsprinzip:
(r , t) =
A
N
k=1
k (r , t) =
A
N
μ
k=1
4π
ds
ik (t)
|r − s |
Ck
(2.52)
(iv) Die in der Leiterschleife Ck induzierte Spannung ist nach dem Induktionsgesetz
uind,k (t) = −
=−
d
d d Φ(Sk ) = −
B (r , t) · da = −
A (r , t) · dr
dt
dt dt
Sk
Ck
rot A
Ck
N
∂A
μ
(2.52)
(r , t) · dr = −
∂t
l=1 4π
Ck Cl
ds · dr
|r − s |
d
il (t)
dt
=: Lkl
wobei die Größen
μ dr · ds
Lkl :=
4π
|r − s |
Ck Cl
(2.53)
(“Neumannsche Formel”)
als Induktionskoeffizienten bezeichnet werden. Eingesetzt in Gl. (2.44) erhält
man somit als Kompaktmodell für die Spulenanordnung die Transformatorgleichungen
uk (t) = rk ik (t) +
N
l=1
Lkl
dil
dt
(2.54)
2.3.3 Zusammenhang mit der magnetischen Feldenergie
85
Hierbei ist rk der ohmsche Innenwiderstand der Leiterschleife Ck . Die Koeffizienten
Lkk heißen Selbstinduktionskoeffizienten, Lkl mit k = l heißen Gegeninduktionskoeffizienten. Offenkundig gilt
Lkl = Llk
(2.55)
(k, l = 1, .., N )
Die Induktivitätsmatrix
⎛
⎜ L11
⎜
⎜
⎜ L21
L = (Lkl ) = ⎜
⎜ .
⎜ ..
⎜
⎝
L12
···
L22
..
.
···
..
.
⎞
L1N ⎟
⎟
L2N ⎟
⎟
⎟
.. ⎟
. ⎟
LN 1 LN 2 · · · LN N
(2.56)
⎟
⎠
ist daher symmetrisch und sogar positiv definit (siehe nächster Abschnitt).
2.3.3 Zusammenhang mit der magnetischen Feldenergie
(i) Mit Hilfe der Induktivitätskoeffizienten Lkl lässt sich die in einer Spulenanordnung gespeicherte magnetische Energie Wmag als Funktion der Spulenströme il
= μH
):
ausdrücken. Nach (1.23) gilt für lineare Medien (B
Wmag =
Ω
1 3
1 d3 r
H · rot A
H ·B d r =
2
2
Ω
1 1 3
) da
=
rot
(H × A
H · A d r − 2
2
Ω
∂Ω
j
×A
) = rot H
·A
−H
· rot A
und der Gaußsche Integralsatz verwenwobei div(H
= j . Wählt man für Ω eine
det wurden. In quasistationärer Näherung gilt rot H
Kugel K(O , R), die die Spulenanordnung einschließt, und lässt R → ∞ gehen, so
×A
| ∼ 1/R5 für quasistationäres
verschwindet das Oberflächenintegral (wegen |H
Magnetfeld). Wir erhalten somit
Wmag =
1 3
j ·A d r
2 3
R
(2.57)
86
2.3 Induktive Speicherelemente
(ii) Das Integral (2.57) ist nur über solche Raumbereiche zu erstrecken, auf denen die
Stromdichte j nicht verschwindet, d.h. über die Leiterschleifen Ck . Wegen (2.50)
folgt:
N 1 (r , t) · dr · ik (t)
(2.58)
A
Wmag =
2 k=1
Ck
Nun ist
Ck =∂Sk
(r , t) · dr =
A
Sk
· da =
rot A
Sk
· da = Φ(Sk )
B
(2.59)
der magnetische Fluss durch die von Ck begrenzte Fläche Sk , sodass wir das interessante Ergebnis erhalten:
Wmag
N
1 =
Φ(Sk ) · ik
2 k=1
(2.60)
(iii) Setzen wir schließlich die Felddarstellung (2.52) in (2.58) ein, so folgt:
Wmag =
N
μ ds · dr
1 · ik il
2 k,l=1 4π
|r − s |
Ck Cl
Lkl
Damit ist die magnetische Feldenergie mit Hilfe der Induktivitätsmatrix als Funktion der Spulenströme il ausgedrückt:
Wmag =
N
1 1
ik Lkl il = I T L I
2 k,l=1
2
(2.61)
mit dem Vektor der Spulenströme I := (i1 , i2 , ..., iN )T .
Da die magnetische Energie stets positiv ist, muss die Induktivitätsmatrix positiv
definit sein.
Durch Einsetzen von (2.52) in (2.59) erhalten wir schließlich noch die wichtige
Beziehung
Φ(Sk ) =
N
Lkl il
(2.62)
l=1
(iv) Verallgemeinerung auf dreidimensionale stromführende Schleifen
Die Beziehung (2.61) gilt auch für nicht-drahtförmige Schleifen, also dreidimensionale stromführende Gebiete Ωl mit ausgedehntem Querschnitt, die aber topologisch
einen induktiven Zweipol (Eintor) darstellen.
2.3.3 Zusammenhang mit der magnetischen Feldenergie
il
87
Al(ein)
Wl
uind
il
Al(aus)
Abbildung 2.11: Räumlich ausgedehnte Leiterschleife
In diesem Fall wird Gl. (2.61) zur allgemeinen Definition der Induktivitätskoeffizienten für induktiv gekoppelte Eintore verwendet:
N
∂Wmag
=
Lkl · il
∂ik
l=1
(2.63)
∂ 2 Wmag
= Lkl
∂ik ∂il
(2.64)
(v) Allgemeine Neumannsche Formel:
Im Falle räumlich ausgedehnter Leiterschleifen (Abb. 2.11) kann die Stromverteilung in jeder Schleife Ωl als Produkt
jl (r , t) = sl (r ) · il (t)
angesetzt werden. Dabei ist die “Formfunktion” sl (r ) die Lösung des stationären
Strömungsproblems (vgl. Abs. 1.5.4.4)
div s l = 0 in Ωl
(in)
mit der Randbedingung, dass durch die beiden Klemmen Al
Einheitsstrom fließt:
(in)
Al
sl · da = −1 und
(out)
Al
sl · da = +1
(out)
und Al
der
88
2.4 Niederfrequente Wechselstromnetzwerke
Die magnetische Feldenergie kann dann mit Gl. (2.57) und Gl. (2.49) berechnet
werden:
Wmag
1
=
2
d3 r
j · A
R3
N N
1 μ jl (s )
=
jk (r )
d3 r d3 s
2 k=1
|r − s |
l=1 4π
Ωk
Ωl
N
1 μ sk (r ) · sl (s ) 3 3
=
d r d s · il (t) ik (t)
2 k,l=1 4π
|r − s |
Ωk Ωl
Lkl
Hieraus leiten sich dann mit Hilfe von (2.64) die Neumannschen Induktivitätskoeffizienten ab:
Lkl =
∂ 2 Wmag
μ sk (r ) · sl (s ) 3 3
=
d rd s
∂ik ∂il
4π
|r − s |
(2.65)
Ωk Ωl
2.4 Niederfrequente Wechselstromnetzwerke
Wechselstromnetzwerke sind der klassische Ansatz zur Beschreibung der Funktion von
Wechselstromgeräten und -anlagen auf der Makromodellebene. In der Wechselstromtechnik werden zeitlich periodische, insbesondere sinusförmige (harmonische) Stromund Spanungsverläufe benutzt, weil diese eine Reihe von technisch sehr wichtigen Anwendungen ermöglichen. Die wesentlichen Vorteile sind
• Transformierbarkeit (→ Energieversorgung)
• Modulierbarkeit (→ Informationsübertragung)
• Anpassung an Generatoren und Motoren
Im folgenden Abschnitt betrachten wir einfache niederfrequente Wechselstromnetzwerke
aus einfachen linearen resistiven, kapazitiven und induktiven Zweipolen (Eintoren), also
Widerständen, Kondensatoren und Spulen, für die die quasistationäre Näherung und die
Konzentriertheitshypothese gelten.
2.4.1 Grundlegende Begriffe der Wechselstromlehre
89
2.4.1 Grundlegende Begriffe der Wechselstromlehre
2.4.1.1 Wechselspannungsgenerator
Die klassischen und weithin eingesetzten Erzeugungsprinzipien für Wechselstrom (AC =
alternating current) sind
• im Magnetfeld rotierende Leiter (bei kleinen Frequenzen und hoher Leistung)
• Schwingkreis (bei höheren Frequenzen und kleiner bis mittlerer Leistung)
Als idealisiertes Beispiel für einen Wechselspannungsgenerator betrachten wir eine rotierende Leiterschleife, welche durch Bewegungsinduktion eine Wechselspannung u(t)
erzeugt (Abb. 2.12).
r
B
Achse
r
da
r
ez
j
A
u (t )
Drehwinkel j (t )
w
Lager
Abbildung 2.12: Rotierende Leiterschleife als Wechselstrom-Generator
Die Flächennormale der Leiterschleife A bildet mit einer raumfesten Richtung (= kon ) den Drehwinkel ϕ(t), der sich mit konstanter Winkelgeschwinstantes Magnetfeld B
dϕ
digkeit (= Kreisfrequenz)
= ω = const. zeitlich verändert:
dt
ϕ(t) = ωt + ϕ0
(2.66)
90
2.4 Niederfrequente Wechselstromnetzwerke
Der magnetische Fluss durch die Leiterschleife beträgt
Φ(t) =
· da = A|B
| cos ϕ(t) = AB0 cos(ωt + ϕ0 )
B
A(t)
Hieraus ergibt sich die induzierte Spannung:
u(t) = −
dΦ
= ωAB0 sin(ωt + ϕ0 )
dt
Die Generatorspannung hat damit -bauartbedingt- den Verlauf
u(t) = Û sin(ωt + ϕ0 )
mit Û := ωAB0
(2.67)
u (t ) = Uˆ sin (wt + j0 )
Uˆ sin j0
Û
-t 0 = - j 0 w
t
T
Abbildung 2.13: Sinusförmige Wechselspannung
Für sinusförmige Wechselspannungen und -ströme sind folgende Bezeichnungen bzw.
Kenngrößen eingeführt:
• u(t): Momentanwert
• Û : Scheitelwert
• ϕ(t) = ωt + ϕ0 : Momentane Phase
• ϕ0 = ωt0 : Anfangsphase (Phase bei t = 0)
• T : Periodendauer, definiert als kleinstes T ∈ R mit: ∀ u(t) = u(t + k T )
k∈Z
2.4.1 Grundlegende Begriffe der Wechselstromlehre
• f :=
1
1
: Frequenz (Einheit = Hz (Hertz))
T
s
• ω=
2π
= 2πf : Kreisfrequenz (Einheit Hz)
T
91
2.4.1.2 Zeigerdarstellung
(i) Eine praktische und elegante Methode, sinusförmige Spannungs- und Stromverläufe graphisch darzustellen und damit auch analytisch zu rechnen, ist die Zeigerdarstellung. Hierzu stellt man eine Größe mit sinusförmigem Zeitverlauf -hier
exemplarisch die Wechselspannung u(t) in Gl. (2.67)- durch einen zweidimensionalen Vektor der Länge Û in einer U1 -U2 -Ebene dar, der ausgehend von der U1 -Achse
in Richtung des Polarwinkels ϕ(t) weist (Abb. 2.14).
⎛
⎞
⎛
⎞
⎜Û cos ϕ(t)⎟
⎜U1 (t)⎟
Û sin ϕ(t)
U2 (t)
⎝
⎠ := U (t) = ⎝
⎠
(2.68)
ist ein rotierender Zeiger (englisch: Phasor), dessen Spitze auf einem Kreis mit
Radius Û in einer U1 -U2 -Ebene (= R2 ) mit dem Phasen-(Dreh-)winkel ϕ(t) umläuft, wobei ϕ(t) = ωt + ϕ0 gilt. Die Projektion von U (t) auf die U2 -Achse
U2 (t) = Û sin(ϕ(t)) = Û sin(ωt + ϕ0 ) = u(t)
beschreibt dann den tatsächlich auftretenden zeitlichen Spannungsverlauf u(t).
Da der Zeiger U (t) mit konstanter Winkelgeschwindigkeit ω im Gegenzeigersinn
läuft, kann man seine momentane Richtung ϕ(t) zu jedem Zeitpunkt aus seiner
Anfangsposition U (t = 0) zum Zeitpunkt t = 0 dadurch konstruieren, dass man
diesen um den Drehwinkel ωt weiterdreht. Daher genügt die Kenntnis von U (t = 0),
um den realen Spannungsverlauf u(t) zu reproduzieren. Es gilt also der
Satz: Der Zeiger Û = U (t = 0) mit Länge Û und Polarwinkel ϕ0 charakterisiert (bei fester Kreisfrequenz ω) den realen Spannungsverlauf
u(t) eineindeutig.
(ii) Um mit Zeigern algebraisch rechnen zu können, ist es zweckmäßig, diese als komplexe Zahlen aufzufassen. Wir fassen also die U1 -U2 -Ebene als komplexe Zahlenebene
auf, deren Elemente den Zahlenkörper der komplexen Zahlen C = (R2 , +, · ) bilden.
Die kartesischen Einheitsvektoren e1 und e√
2 identifizieren wir mit dem Einselement
in C und mit der imaginären Einheit j = −1:
e1 = 1 und e2 = j =
√
−1
(2.69)
92
2.4 Niederfrequente Wechselstromnetzwerke
U2
Uˆ = U (t = t0 )
U (t )
Û
j0
U1
j (t ) = wt + j0
Abbildung 2.14: Zeigerdarstellung für eine sinusförmige Wechselspannung
Einen Zeiger U schreiben wir dann in der für komplexe Zahlen üblichen Notation
U = U1 e1 + U2 e2 = U1 · 1 + U2 · j = U1 + jU2
Es gilt also:
U = U1 + jU2
mit U1 = Re U (Realteil) und U2 = Im U (Imaginärteil)
(2.70)
Will man einen Zeiger U durch seine Länge Û und seinen Polarwinkel ϕ ausdrücken,
erweist sich die Darstellung in Polarkoordinaten (2.68) als zweckmäßig:
(2.71)
U = Û (cos ϕ + j sin ϕ)
wobei gilt:
Û = |U | =
U12 + U22
U2
=: arg U
ϕ = arctan
U1
mit ϕ ∈ [0, 2π)
(a)
(b)
(2.72)
Mit der komplexen Exponentialfunktion
ejϕ := cos ϕ + j sin ϕ
(2.73)
2.4.1 Grundlegende Begriffe der Wechselstromlehre
93
lässt sich dann ein Zeiger ganz kompakt schreiben als
U = Û ejϕ
(a)
U = |U | e
(b)
j arg U
bzw.
(2.74)
(iii) Für den komplexen Wechselstrom-Kalkül sind folgende Aussagen wichtig:
• Für α, β ∈ R gilt:
ejα · ejβ = ej(α+β)
(2.75)
• Es gilt: Alle komplexen Zeiger der Länge 1 haben die Form
d(ϕ) = ejϕ
mit ϕ ∈ [0, 2π).
(2.76)
• Für ϕ ∈ R (mod 2π) beschreibt die lineare Abbildung
C V → V = d(ϕ) · V = ejϕ · V
(2.77)
die Drehung in R2 um den Drehwinkel ϕ (mod 2π) im Gegenzeigersinn. Denn:
ejα |V | = |V |ej(α+ϕ)
V = ejϕ V = ejϕ α = arg(V )
Also:
arg(V ) = ϕ + α
|V | = |V |
Im(V )
V'
V =|V | e ja
|V |
j
a
Re(V )
Abbildung 2.15: Drehung um Winkel ϕ in R2 (≡ C)
94
2.4 Niederfrequente Wechselstromnetzwerke
• Drehungen im R2 (≡ C) sind additiv und kommutativ.
Wegen ejϕ · ejψ = ej(ϕ+ψ) = ejψ ejϕ gilt:
d(ϕ)d(ψ) = d(ϕ + ψ) = d(ψ)d(ϕ)
(2.78)
• Für Z ∈ C, Z = |Z|ejψ mit ψ = arg Z, beschreibt die lineare Abbildung
C→C:
V → V = Z · V
(2.79)
eine Drehstreckung mit dem Drehwinkel ψ = arg Z und dem Streckungsfaktor
r = |Z|.
Begründung:
V = Z · V = |Z|ejψ · |V |ejα = |Z||V | · ej(ψ+α)
Im (V )
V ¢ = r × V e j (a +y )
y
V = V e ja
a
Re (V )
Abbildung 2.16: Drehstreckung in R2 (≡ C)
Jede komplexe Zahl Z ∈ C lässt sich somit als Drehstreckung in R2 (≡ C)
auffassen und umgekehrt:
Drehung
≡ Multiplikation mit ejψ
Streckung
≡ Multiplikation mit r ∈ R+
Drehstreckung ≡ Multiplikation mit rejψ =: Z ∈ C
2.4.1 Grundlegende Begriffe der Wechselstromlehre
95
(iv) Allgemeine Zeigerdarstellung von Wechselspannung und -strom:
Wir können der realen Wechselspannung
u(t) = Û sin(ωt + ϕu )
(2.80)
i(t) = Iˆ sin(ωt + ϕi )
(2.81)
und dem realen Wechselstrom
in eineindeutiger Weise die komplexen Zeiger
Û = Û ejϕu
und
ˆ jϕi
Iˆ = Ie
zuordnen.
Ist Û bzw. Iˆ bekannt, so erhält man den realen Zeitverlauf von u(t) bzw. i(t),
indem man Û bzw. Iˆ mit der Kreisfrequenz ω in der komplexen U1 -U2 - (bzw.
I1 -I2 )-Ebene rotieren lässt und die umlaufenden Zeiger
U (t) = ejωt · Û ejϕu = Û ej(ωt+ϕu )
(2.82)
ˆ jϕi = Ie
ˆ j(ωt+ϕi )
I(t) = ejωt · Ie
(2.83)
auf die imaginäre Achse (U2 -Achse, I2 -Achse) projiziert:
Im U (t) = Im Û ej(ωt+ϕu ) = Û sin(ωt + ϕu ) = u(t)
ˆ j(ωt+ϕi ) = Iˆ sin(ωt + ϕi ) = i(t)
Im I(t) = Im Ie
Bemerkung: Dass man u(t) mit Im U (t) identifiziert, ist reine Konvention; man
kann ebenso gut mit Re U (t) operieren.
(v) Strom-Spannungs-Zeigerdiagramm:
Es ist zweckmäßig, Û und Iˆ in ein gemeinsames Achsensystem einzutragen, insbesondere wenn mehrere Wechselspannungen und -ströme in ihrer gegenseitigen
Beziehung diskutiert werden sollen.
Man muss aber beachten, dass Û und Iˆ unterschiedliche physikalische Einheiten
besitzen und daher in der komplexen Ebene verschiedene Skalen (Maßstäbe) anzuwenden sind.
Will man aus einem Zeigerdiagramm den tatsächlichen Zeitverlauf der Ströme und
Spannungen ableiten, so lässt man das ganze Diagramm starr mit der Drehung ejωt
rotieren und projiziert die rotierenden Zeiger auf die imaginäre Achse.
96
2.4 Niederfrequente Wechselstromnetzwerke
Im
Iˆ
Iˆ
Û
ji
Û
ju
Re
Abbildung 2.17: Zeigerdiagramm für Wechselspannung und -strom.
2.4.2 Wechselstromschaltungen mit linearen Bauelementen
2.4.2.1 Lineare Wechselstrom-Bauelemente
Definition: Unter einem linearen Wechselstrombauelement wollen wir im folgenden
einen stromerhaltenden Zweipol (d.h. Eintor) verstehen, bei dem die anliegende Spannung u(t) und der durchlaufende Klemmenstrom i(t) eine zeitunabhängige und arbeitspunktunabhängige Beziehung zwischen den Scheitelwerten Û und Iˆ sowie den Phasen
ϕu und ϕi aufweisen.
Û
Z
Iˆ
Abbildung 2.18: Schaltungssymbol für ein lineares Bauelement
Das heißt, dass die rotierenden Spannungs- und Stromzeiger U (t) und I(t) über eine
konstante Drehstreckung Z ∈ C starr miteinander verknüpft sind:
jwt
jwt
∃ U (t) = Z · I(t) ⇔ e Û = Ze Iˆ
Z∈C
Hieraus folgt die zeitunabhängige Beziehung
Û = Z · Iˆ
komplexes Ohmsches Gesetz
(2.84)
2.4.2 Wechselstromschaltungen mit linearen Bauelementen
97
Die Größe Z ∈ C heißt Impedanz (oder komplexer Scheinwiderstand) und charakterisiert das lineare Bauelement. Ausgedrückt durch Scheitelwerte und Phasenwinkel lautet
(2.84)
ˆ jϕi
Û ejϕu = |Z|ej arg(Z) · Ie
Dies ist äquivalent zu den beiden reellen Beziehungen
Û = |Z|Iˆ
arg(Z) = ϕu − ϕi =: Δϕ
(a)
(b)
(2.85)
|Z| heißt (reeller) Scheinwiderstand und Δϕ := ϕu − ϕi = arg Z heißt Phasenverschiebung.
Die Impedanz lässt sich aus diesen beiden Größen darstellen als
Z = |Z|ejΔϕ
(2.86)
Die Umkehroperation zu (2.84) lautet:
1
Iˆ =
· Û =: Y · Û
Z
(2.87)
1
wird als Admittanz (oder komplexer Scheinleitwert) bezeichnet. Ihr
Z
Betrag |Y | heißt (reeller) Scheinleitwert. Wegen
Die Größe Y :=
Y = |Z|ej arg Z
−1
=
1 −j arg Z
e
|Z|
(2.88)
besteht zwischen Betrag und Phase von Admittanz und Impedanz der Zusammenhang
1
|Z|
arg Y = − arg Z = −Δϕ
|Y | =
(a)
(b)
2.4.2.2 Elementare Beispiele für lineare Wechselstrombauelemente
(i) Ohmscher Widerstand:
Für „nicht zu hohe Frequenzen“ (=
ˆ quasistationäre Näherung) gilt:
u(t) = R i(t) ⇔ ∀ Û sin(ωt + ϕu ) = RIˆ sin(ωt + ϕi )
t∈R
(2.89)
98
2.4 Niederfrequente Wechselstromnetzwerke
Hieraus schließen wir
ϕu = ϕi
Û = RIˆ
mod 2π, d.h. Δϕ = 0
(a)
(b)
(2.90)
Damit ergibt sich mit (2.86) für die Impedanz:
Z = R e(j · 0) = R
(2.91)
Das komplexe Ohmsche Gesetz lautet dann:
Û = RIˆ
(2.92)
Dies bedeutet geometrisch, dass der Strom- und der Spannungszeiger gleichsinnig
parallel gerichtet sind.
Zeigerdiagramm:
Im
Û
Iˆ
ji
ju
Re
Abbildung 2.19: Zeigerdiagramm für einen ohmschen Widerstand
Schaltsymbol:
Û
R
Iˆ
Abbildung 2.20: Schaltsymbol für einen ohmschen Widerstand
2.4.2 Wechselstromschaltungen mit linearen Bauelementen
99
(ii) Induktivität:
Es gilt: u(t) = L
di(t)
(vgl. Gl. (2.46))
dt
Setzen wir die realen Zeitverläufe (2.80) und (2.81) ein, erhalten wir:
π
∀ Û sin(ωt + ϕu ) = ωLIˆ cos(ωt + ϕi ) = ωLIˆ sin(ωt + ϕi + )
2
t∈R
Vergleich von Amplitude und Phase ergibt:
Û = ωLIˆ
Δϕ = ϕu − ϕi =
(a)
π
2
mod 2π
(2.93)
(b)
Mit (2.86) folgt für die Impedanz:
π
Z = ωLej 2 = jωL
(2.94)
Die Impedanz is also in diesem Fall rein imaginär mit positivem Imaginärteil. Die
Größe Im Z = ωL heißt Blindwiderstand (Reaktanz). Das komplexe Ohmsche
Gesetz hat die Form
(2.95)
Û = jωLIˆ
Der Spannungszeiger eilt im Zeigerdiagramm dem Stromzeiger um 90◦ =
Zeigerdiagramm:
Im
Û
Spule L
ju
Dj
Iˆ
Dj = ju - ji =
ji
p
2
Re
Abbildung 2.21: Zeigerdiagramm für eine Induktivität (ideale Spule)
π
voraus.
2
100
2.4 Niederfrequente Wechselstromnetzwerke
Schaltsymbol:
Û
L
Iˆ
Abbildung 2.22: Schaltsymbol für eine Induktivität (ideale Spule)
(iii) Kapazität:
q(t)
, wobei q(t) die auf der positiven Eleku(t)
trode gespeicherte Ladung ist und u(t) die anliegende Klemmenspannung. Daher
fließt beim Laden oder Entladen des Kondensators der Klemmenstrom
In quasistationärer Näherung gilt C =
i(t) = C
du(t)
dt
(2.96)
Mit den realen Zeitverläufen (2.80) und (2.81) ergibt sich
∀
t∈R
π
Iˆ sin(ωt + ϕi ) = ω C Û cos(ωt + ϕu ) = ω C Û sin(ωt + ϕu + )
2
Vergleich von Amplitude und Phase ergibt
Iˆ = ωC Û
(a)
Δϕ = ϕu − ϕi = −
π
2
mod 2π
(b)
(2.97)
Mit (2.86) folgt für die Impedanz
Z=
1 −j π
1
e 2 =
ωC
jωC
(2.98)
1
= jωC
Z
(2.99)
Die Admittanz ist der Kehrwert
Y =
2.4.2 Wechselstromschaltungen mit linearen Bauelementen
101
Die Impedanz ist rein imaginär mit negativem Imaginärteil. Die Größe Im Y = ωC
heißt Blindleitwert (Suszeptanz). Das komplexe Ohmsche Gesetz hat die spezielle
Form
(2.100)
Iˆ = jωC · Û
bzw.
Û =
1 ˆ
I
jωC
(2.101)
Der Spannungszeiger läuft im Zeigerdiagramm dem Stromzeiger um Δϕ = −90◦ =
π
− hinterher.
2
Zeigerdiagramm:
Kondensator C
Im
Iˆ
ji
Dj
ju
Û
Dj = ju - ji = -
p
2
Re
Abbildung 2.23: Zeigerdiagramm für eine Kapazität (idealer Kondensator)
Schaltsymbol:
Û
C
Iˆ
Abbildung 2.24: Schaltsymbol für eine Kapazität (idealer Kondensator)
102
2.4 Niederfrequente Wechselstromnetzwerke
2.4.2.3 Kirchhoffsche Regeln für Wechselstromschaltungen
(i) An den Knoten eines Wechselstrom-Netzwerks gilt die Kirchhoffsche Knotenregel
(2.17): Sind ik (t) (k ∈ K) die von einem Knoten auslaufenden Zweigströme, so
gilt:
∀
t∈R k∈K
ik (t) = 0
(2.102)
Weiterhin gilt für jede Masche die Kirchhoffsche Maschenregel (2.19):
Sind ul (t) (l ∈ M ) die längs einer Masche auftretenden Zweisspannungen und ue (t)
die in der Masche eingeprägte(n) Spannungsquelle(n), so gilt:
∀
t∈R l∈M
ul (t) = ue (t)
(2.103)
(ii) Um diese beiden Gleichungen in die komplexe Zeigerdarstellung zu übersetzen,
benutzen wir die rotierenden Spannungs- und Stromzeiger (2.82) und (2.83) und
erhalten
an Knoten:
∀
t∈R
⎛
Im I k (t) = Im ⎝
k∈K
⎞
⎡
I k (t)⎠ = Im ⎣
k∈K
⎤
⎡⎛
(Iˆk ejωt )⎦ = Im ⎣⎝
k∈K
⎞
⎤
Iˆk ⎠ ejωt ⎦ = 0
k∈K
längs Maschen:
∀
t∈R
⎛
Im U l (t) = Im ⎝
l∈M
⎞
⎡
U l (t)⎠ = Im ⎣
l∈M
⎤
(Û l ejωt )⎦ = Im ⎣⎝
l∈M
⎡⎛
= Im U e (t) = Im Û e ejωt
⎞
⎤
Û l ⎠ ejωt ⎦
l∈M
π
Werten wir diese Gleichungen aus für t = 0 und ωt = , so erhalten wir die
2
Kirchhoffschen Regeln in komplexer Darstellung
Iˆk ejϕi,k =
k∈K
l∈M
Ûl ejϕu,l =
Iˆk = 0
(2.104)
Û l = Û e = Ûe ejϕe
(2.105)
k∈K
l∈M
2.4.2 Wechselstromschaltungen mit linearen Bauelementen
103
2.4.2.4 Einfache Grundschaltungen aus R, L, C
Im Folgenden sollen einige aus komplexen Impedanzen aufgebaute elementare Schaltungen betrachtet werden.
(i) Serienschaltung von Impedanzen
Die an den in Reihe geschalteten Impedanzen Z 1 und Z 2 abfallenden Zweigspannungen Û1 und Û2 werden addiert, um die an der Ersatzimpedanz Z S abfallende
Spannung Û zu erhalten:
Û = Û1 + Û2 = Z1 Iˆ + Z2 Iˆ = (Z1 + Z2 )Iˆ
Die Ersatzimpedanz ist folglich:
(2.106)
Z S = Z 1 + Z2
Abbildung 2.25: Serienschaltung aus komplexen Impedanzen
(ii) Parallelschaltung von Impedanzen
Die durch die parallel geschalteten Impedanzen Z 1 und Z 2 laufenden Zweigströme
Iˆ1 und Iˆ2 werden addiert, um den effektiven Zweigstrom Iˆ durch die Ersatzimpedanz Z P zu erhalten:
Û
Û
+
=
Iˆ = Iˆ1 + Iˆ2 =
Z 1 Z2
1
1
Û
+
Z1 Z 1
Für die Ersatzimpedanz bzw. Ersatzadmittanz gilt folglich:
1
1
1
=
+
ZP
Z 1 Z2
(2.107)
YP = Y1 + Y2
(2.108)
104
2.4 Niederfrequente Wechselstromnetzwerke
Abbildung 2.26: Parallelschaltung aus komplexen Impedanzen
(iii) RL-Serienschaltung (RL-Glied)
Ein ohmscher Widerstand R wird mit einer Induktivität L in Reihe geschaltet.
Iˆ
Û
Uˆ R
Uˆ L
R
L
Abbildung 2.27: RL-Glied.
ˆ
Diese Anordnung (RL-Glied) genügt dem komplexen Ohmschen Gesetz Û = Z · I,
wobei sich seine Impedanz aus Gl. (2.106) ergibt:
(2.109)
Z = R + jωL
Hieraus erhält man den reellen Scheinwiderstand |Z| und die Phasenverschiebung
Δϕ:
√
(2.110)
|Z| = R2 + ω 2 L2
Δϕ = ϕu − ϕi = arg Z = arctan
ωL
R
(2.111)
Der Scheinwiderstand |Z(ω)| zeigt als Funktion der Kreisfrequenz ω ein Tiefpassverhalten (Abb. 2.28). Die Phasenverschiebung Δϕ liegt immer im 1. Quadranten
π
0 ≤ Δϕ ≤ .
2
Um das Zeigerdiagramm des RL-Glieds zu konstruieren, zerlegt man die Gesamtspannung Û in die am Widerstand und an der Induktivität abfallenden Teilspannungen
2.4.2 Wechselstromschaltungen mit linearen Bauelementen
105
ˆ
Û = ÛR + ÛL = R · Iˆ + jωLI,
wobei Iˆ ∈ R+ gewählt werden kann.
Tiefpass
2R
R L
R L
Abbildung 2.28: Scheinwiderstand und Phase des RL-Glieds.
Im
Û
Uˆ L
Uˆ R = R Iˆ
Uˆ = jw L Iˆ
L
tan Dj =
Dj
Uˆ R
Iˆ
wL
R
Re
Abbildung 2.29: Zeigerdiagramm des RL-Glieds.
(iv) RC-Parallelschaltung (RC-Glied):
Ein ohmscher Widerstand R wird mit einer Kapazität C parallel geschaltet.
Abbildung 2.30: RC-Glied.
106
2.4 Niederfrequente Wechselstromnetzwerke
Dieses „RC-Glied“ genügt dem komplexen Ohmschen Gesetz Iˆ = Y · Û , wobei sich
die komplexe Admittanz aus Gl. (2.108) ergibt:
Y =
1
+ jωC = G + jωC
R
(2.112)
Hieraus erhält man den Scheinleitwert |Y | und den Scheinwiderstand |Z|:
|Y | =
√
|Z| = √
G2 + ω 2 C 2
(2.113)
R
1 + ω 2 R2 C 2
(2.114)
Die Phasenverschiebung ergibt sich aus
Δϕ = arg Z = − arg Y = − arctan
ωC
G
das heißt:
Δϕ = − arctan (ωRC)
(2.115)
Die Phasenverschiebung Δϕ liegt in diesem Fall immer im 4. Quadranten
π
− ≤ Δϕ ≤ 0. Der Scheinwiderstand |Z(ω)| zeigt als Funktion der Kreisfrequenz
2
ω ein Hochpassverhalten (Abb. 2.31)
R
2
Hochpass
Abbildung 2.31: Scheinwiderstand und Phase des RC-Glieds.
Um das Zeigerdiagramm des RC-Glieds zu konstruieren, zerlegt man den Gesamtstrom in die durch den Widerstand und den Kondensator laufenden Teilströme
Û
Iˆ = IˆR + IˆC = + jωC Û
R
wobei Û ∈ R+ gewählt werden kann.
2.4.2 Wechselstromschaltungen mit linearen Bauelementen
107
Im
Iˆ C = jw CUˆ
Iˆ R = GUˆ
Iˆ
Iˆ C
tan (-Dj ) =w RC
-Dj
IˆR
Re
Û
Abbildung 2.32: Zeigerdiagramm des RC-Glieds.
(v) Gedämpftes LC-Glied:
Bei dieser Schaltung bilden eine Kapazität C und eine Induktivität L einen parallelen LC-Schwingkreis, der durch einen ohmschen Widerstand R gedämpft wird.
Abbildung 2.33: Gedämpftes LC-Glied.
Die Admittanz Y der Anordnung ergibt sich durch Anwendung von Gl. (2.106)
und (2.108): Die Impedanz des RL-Gliedes ist
Z RL = R + jωL
woraus sich für die Admittanz der gesamten Schaltung ergibt:
Y =
1
1
= jωC +
Z
Z RL
108
2.4 Niederfrequente Wechselstromnetzwerke
Wir erhalten schließlich:
1
1 + jωCZ RL
1 − ω 2 LC + jωRC
=Y =
=
Z
Z RL
R + jωL
(a)
(2.116)
R − jωL + jωC (R + ω L )
R2 + ω 2 L2
2
Y =
2
2
(b)
Der Scheinleitwert beträgt
!
|Y | =
1 + ω 2 (R2 C 2 − 2LC) + ω 4 L2 C 2
R2 + ω 2 L2
(2.117)
und die Phase der Impedanz ist:
Δϕ = − arg Y = − arctan
&
1
ωC R2 + ω 2 L2 − ωL
R
'
(2.118)
Um das Zeigerdiagramm zu konstruieren, wählen wir Û ∈ R+ und zerlegen den
Gesamtstrom Iˆ in die Zweigströme
Iˆ = IˆC + IˆRL
mit
IˆC = jωC Û
und IˆRL =
1
Û
R + jωL
wobei sich die Richtung ϕRL von IˆRL aus
tan ϕRL = −
ωL
R
ergibt.
Abbildung 2.34: Gedämpftes LC-Glied.
2.4.2 Wechselstromschaltungen mit linearen Bauelementen
109
2.4.2.5 Zusammenfassung zur Wechselstromrechnung
Die modellhafte Beschreibung von Wechselstromschaltungen mit Hilfe komplexer Netzwerke lässt sich folgendermaßen zusammenfassen:
(i) Zweigspannungen und -ströme werden durch komplexe Zeiger dargestellt:
Reale Wechselspannung u(t)
Spannungszeiger Û ∈ C
Realer Wechselstrom i(t)
Stromzeiger Iˆ ∈ C
(ii) Linearen Bauelementen (R, L, C) wird eine Impedanz Z ∈ C zugeordnet, so
dass ihr Klemmenverhalten durch das verallgemeinerte Ohmsche Gesetz Û = Z · Iˆ
beschrieben werden kann. Geometrisch lässt sich die Impedanz hierbei als Drehstreckung Z = |Z|ejΔϕ im Zeigerraum R2 (≡ C) interpretieren, die den Stromzeiger
Iˆ auf den Spannungszeiger Û abbildet.
Elementare Beispiele sind:
Bauelement
ohmscher Widerstand
Spule
|Z|
R
ωL
Δϕ
0
π
2
Z
R
jωL
Y
G=
1
R
Kondensator
1
ωC
π
−
2
1
jωC
1
jωL
jωC
(iii) Eine Wechselstromschaltung entspricht einem komplexen Kirchhoffschen Netzwerk.
Dessen Topologie wird genauso beschrieben wie im Gleichstromfall (Knoten, gerichtete Zweige, Maschen, lineare Bauelemente, Strom- und Spannungsquellen).
Um die Netzwerkgleichungen zur Netzwerkanalyse aufzustellen, stützt man sich
auf die
Knotenregel:
ik (t) = 0
k∈K
Iˆk = 0
k∈K
und die Maschenregel:
l∈M
ul (t) = ue (t)
l∈M
Û l = Û e
110
2.4 Niederfrequente Wechselstromnetzwerke
2.4.3 Leistung und Effektivwerte
Wichtige Anwendungen von Wechselstrom-Netzwerken finden sich u.a. in der Energietechnik, insbesondere im Bereich der Energieversorgung. Hier spielen Probleme der Energieübertragung und der Leistungsbilanz eine große Rolle, bei deren Analyse sich der
Wechselstrom-Kalkül als sehr hilfreich erweist.
2.4.3.1 Momentane Leistung
Elektrische Anlagen (oder Teile davon) können sehr oft als lineares Wechselstrom-Netzwerk
dargestellt werden, das elektrische Leistung verbraucht oder liefert. In seiner einfachsten
Form ist es ein stromerhaltender Zweipol (Eintor), an dem eine Klemmenspannung
u(t) = Û sin(ωt + ϕu )
anliegt, die den Klemmenstrom
i(t) = Iˆ sin(ωt + ϕi )
antreibt.
Iˆ
i(t )
lineares
Netzwerk
u(t )
Û
Gesamtimpedanz
Z
Abbildung 2.35: Darstellung eines linearen Wechselstromnetzwerks als komplexe
Impedanz
Die dem Netzwerk momentan zugeführte Leistung beträgt:
p(t) = u(t)i(t) = Û Iˆ sin(ωt + ϕu ) sin(ωt + ϕi )
Dieser Ausdruck lässt sich umformen zu
p(t) =
1 ˆ
1
Û I cos(ϕu − ϕi ) − Û Iˆ cos(2ωt + ϕu + ϕi )
2
2
zeitl. Mittelwert Pm
zeitlicher Mittelwert 0
(2.119)
Die Momentanleistung p(t) pendelt also mit der doppelten Netzfrequenz 2ω um ihren
2.4.3 Leistung und Effektivwerte
111
zeitlichen Mittelwert (Abb. 2.36):
Pm =
1 ˆ
Û I cos Δϕ
2
(2.120)
Dabei ist Δϕ := ϕu − ϕi die bereits bekannte Phasenverschiebung (relativer Phasenwinkel) zwischen Spannung und Strom. Ist Δϕ = 0, so enthält das Netzwerk energiespeichernde Bauelemente (Kapazitäten oder Induktivitäten, vgl. Abschnitt 2.4.2). In diesem
Fall ist cos Δϕ < 1; dies bedeutet, dass während einer Periode in einem Zeitabschnitt
dem Netzwerk Energie zugeführt wird (p(t) > 0), während in einem anderen Zeitabschnitt das Netzwerk Energie abgibt (p(t) < 0) (vgl. Abb 2.36). Damit dies geschehen
kann, muss das Netzwerk Energie kapazitiv oder induktiv “zwischenspeichern“ können.
p (t )
1 ˆˆ
UI
2
PPMm
t
1 ˆˆ
U I cos Dj
2
Abbildung 2.36: Einem Wechselstromnetzwerk momentan zugeführte Leistung
2.4.3.2 Effektivwerte, Wirkleistung
(i) Stellt das Netzwerk einen Einergieverbraucher dar, so interessiert man sich für
die im zeitlichen Mittel während einer Periode T aufgenommene Leistung, die
sogenannte Wirkleistung PW . Sie ist für allgemeine zeitperiodische Momentanleistungen p(t) definiert als
PW
1
=
T
T
p(t) dt
(2.121)
0
Für den sinusförmigen Zeitverlauf (2.119) gilt:
PW = Pm =
1 ˆ
Û I cos Δϕ
2
(2.122)
112
2.4 Niederfrequente Wechselstromnetzwerke
(ii) Um die Größe eines zeitperiodischen Spannung- oder Stomverlaufs betragsmäßig
zu quantifizieren, definiert man dessen Effektivwert als
Ueff
bzw.
Ieff
(
)
T
)
)1
=*
u(t)2 dt
T
0
(
)
T
)
)1
:= *
i(t)2 dt
T
(2.123)
(2.124)
0
Die Effektivwerte bieten ein vernünftiges Maß für die Größe von u(t) und i(t) auch
dann, wenn deren zeitlicher Mittelwert Null ist.
Im Falle sinusförmiger Spannungs- oder Stromverläufe gilt:
2
Ueff
T
2π
1 2
1 2 2
1
2
=
Û sin(ωt + ϕu ) dt =
Û sin ϕ dϕ = Û 2
T
ωT
2
0
0
mit der Substitution ϕ = ωt + ϕu
Also folgt:
1
Ueff = √ Û
2
(2.125)
In analoger Weise erhalten wir für den Strom:
1
Ieff = √ Iˆ
2
(2.126)
PW = Ueff Ieff cos Δϕ
(2.127)
Damit gilt für die Wirkleistung:
NB: Bei der Bezeichnung der Effektivwerte wird sehr oft der Index „eff“ weggelassen; man schreibt dann einfach
1
U = √ Û ;
2
1
I = √ Iˆ
2
(iii) Im komplexen Wechselstrom-Kalkül definiert man konsistent mit (2.125) und (2.126)
die Effektivwert-Zeiger
1
U = √ Û ;
2
1
I = √ Î
2
(2.128)
2.4.3 Leistung und Effektivwerte
113
Es gilt dann:
|U | = Ueff
und |I| = Ieff
Die für die Leistungsbilanz zentrale Größe ist der komplexe Leistungszeiger
(oder kurz: komplexe Leistung)
P :=
1
Û · Iˆ∗ = U · I ∗
2
(2.129)
(Schreibweise: für z = x + jy ∈ C bezeichnet z ∗ = x − jy die konjungiert komplexe
Größe)
ˆ jϕi folgt:
Mit Û = Û ejϕu und Î = Ie
P =
1
Û Iˆ ej(ϕu −ϕi ) = Ueff Ieff ejΔϕ
2
(a)
(2.130)
bzw. P = Ueff Ieff (cos Δϕ +j sin Δϕ)
(b)
PW = Wirkleistung
Die Wirkleistung lässt sich somit als Realteil der komplexen Leistung berechnen:
PW = Re P
(2.131)
(iv) Wir wollen den Begriff der Wirkleistung an drei typischen Beispielen verdeutlichen:
• Ohmscher Widerstand: Es gilt
Û = R Î
(d.h. Δϕ = 0)
Der Leistungszeiger
P =
∗
∗
1
1
1
2
Û · Î = RÎ · Iˆ = RIˆ2 = RIeff
2
2
2
ist rein reell. Daher ist die Wirkleistung gegeben durch
2
PW = Re P = R Ieff
= Ueff · Ieff
in Übereinstimmung mit (2.127) für Δϕ = 0.
114
2.4 Niederfrequente Wechselstromnetzwerke
• Spule: Es gilt
Û = jωLÎ
(d.h. Δϕ =
π
)
2
Der Leistungszeiger
P =
∗
∗
1
1
1
Û · Î = jωLÎ · Iˆ = jωLIˆ2
2
2
2
ist rein imaginär. Die Wirkleistung ist daher
PW = Re P = 0
π
in Übereinstimmung mit (2.127) für Δϕ = . Es wird zeitperiodisch Energie
2
induktiv gespeichert und wieder abgegeben, aber keine Leistung verbraucht.
• Kondensator: Es gilt
Û =
1
Î
jωC
π
(d.h. Δϕ = − )
2
Der Leistungszeiger
P =
∗
∗
1
1 1
j 1 ˆ2
Û · Î =
Î · Iˆ = −
I
2
2 jωC
2 ωC
ist rein imaginär. Die Wirkleistung ist daher
PW = Re P = 0
π
in Übereinstimmung mit (2.127) für Δϕ = − . Es wird zeitperiodisch Energie
2
kapazitiv gespeichert und wieder abgegeben, aber keine Leistung verbraucht.
2.4.3.3 Leistungsbilanz bei energiespeichernden Bauelementen
Wir wollen den Energiefluss bei rein induktiven und rein kapazitiven Bauelementen noch
etwas genauer analysieren.
(i) Spule: Die im Magnetfeld einer Spule momentan gespeicherte Energie beträgt
(2.61)
Wmag (t) =
1
Li(t)2 .
2
Ihre Zeitableitung
dWmag (t)
di(t)
= L i(t)
= u(t)i(t) = p(t)
dt
dt
ist die momentan zu- oder abgeführte Leistung.
2.4.3 Leistung und Effektivwerte
115
Für einen sinusförmigen Stromverlauf
i(t) = Iˆ sin(ωt)
ergibt sich explizit
Wmag (t) =
1 ˆ2 2
1
LI sin (ωt) = LIˆ2 (1 − cos(2ωt))
2
4
und hieraus die Momentanleistung (vgl. Abb. 2.37)
p(t) =
dWmag (t)
1
= ωLIˆ2 sin(2ωt)
dt
2
Wmag (t )
(2.132)
1 ˆ2
LI
2
1
w LIˆ 2
2
t
Abbildung 2.37: Zur Leistungsbilanz bei der Spule
Die Wirkleistung
PW
T
1 =
p(t) dt = 0
T
0
verschwindet; es wird pro Periode T (sogar pro Halbperiode T /2) genau so viel
Energie zugeführt wie abgegeben.
116
2.4 Niederfrequente Wechselstromnetzwerke
(ii) Kondensator: Die im elektrischen Feld im Kondensator momentan gespeicherte
Energie beträgt
(2.40)
Wel (t) =
1
Cu(t)2
2
Ihre Zeitableitung
dWel (t)
du(t)
= Cu(t)
= u(t)i(t) = p(t)
dt
dt
ist die momentan zu- oder abgeführte Leistung.
Für einen cosinusförmigen Spannungsverlauf
u(t) = Û cos(ωt)
ergibt sich explizit
Wel (t) =
1
1
C Û 2 cos2 (ωt) = C Û 2 (1 + cos(2ωt))
2
4
und hieraus die Momentanleistung (vgl. Abb. 2.38)
p(t) =
dWel (t)
1
= − ωC Û 2 sin(2ωt)
dt
2
Wel (t )
(2.133)
1 ˆ2
CU
2
1
wCUˆ 2
2
t
u (t )
Abbildung 2.38: Zur Leistungsbilanz beim Kondensator
Die Wirkleistung
PW
T
1 =
p(t) dt = 0
T
0
verschwindet; es wird pro Periode T (sogar pro Halbperiode T /2) genau so viel
Energie zugeführt wie abgegeben.
2.4.3 Leistung und Effektivwerte
117
2.4.3.4 Scheinleistung und Blindleistung
Die vom Verbrauchernetzwerk über die äußeren Klemmen zeitperiodisch aufgenommene
und wieder abgegebene Energie verursacht einen Stromanteil, der die Zuleitung (= Energieübertragungsstrecke) genau so belastet wie der zur Wirkleistung beitragende Strom.
Um diesen Leistungsanteil quantifizieren zu können, führt man den Begriff der Blindleistung ein. Zu dessen Herleitung ist die folgende Leistungsbilanzbetrachtung hilfreich.
(i) Leistungsbilanz bei einem allgemeinen linearen Wechselstrom-Netzwerk:
Wir betrachten einen linearen Wechselstrom-Zweipol mit Klemmenspannung u(t)
und Klemmenstrom i(t), der durch eine komplexe Impedanz Z charakterisiert wird.
Die komplexen Spannungs- und Stromzeiger genügen also dem komplexen Ohmschen Gesetz Û = Z · Î. Ohne Beschränkung der Allgemeinheit können wir den
Phasenwinkel ϕi des Stromes i(t) zu Null setzen, also ϕi = 0. Dann gilt
i(t) = Iˆ sin(ωt)
und der Stromzeiger ist rein reell: Iˆ = Iˆ ∈ R+ .
Der reale Spannungsverlauf lautet dann
ˆ jωt ) = Re(Z) Iˆ sin(ωt) +Im(Z) Iˆ cos(ωt)
u(t) = Im(Û ejωt ) = Im(Z Ie
i(t)
Die dem Verbrauchersystem zugeführte Momentanleistung beträgt
p(t) = u(t)i(t) = Re(Z) i(t)2 + Im(Z) Iˆ2 sin(ωt) cos(ωt)
1
sin(2ωt)
2
Nach leichter Umformung erhalten wir
2
p(t) = Re(Z) i(t)2 + Im(Z) Ieff
sin(2ωt)
(2.134)
Für dissipative Verbraucher (dies ist der Regelfall) ist Re(Z) ≥ 0. Daher ist der
erste Term auf der rechten Seite stets positiv und trägt zur im System verbrauchten Wirkleistung PW bei. Der zweite Term ist zu gleichen Zeitanteilen positiv und
negativ (d.h. sein zeitlicher Mittelwert ist Null) und beschreibt die Aufnahme oder
Abgabe von induktiv und/oder kapazitiv gespeicherter Energie W (t). Präzise formuliert gilt für die Wirkleistung
PW
T
T
1
1
2
p(t) dt = Re(Z)
i(t)2 dt = Re(Z) Ieff
=
T
T
0
0
(2.135)
118
2.4 Niederfrequente Wechselstromnetzwerke
Daher wird
(2.136)
RW := Re Z
auch als Wirkwiderstand bezeichnet.
Für die zeitliche Änderung der gespeicherten Energie W (t) folgt aus Gl. (2.134)
dW (t)
2
sin(2ωt)
= Im(Z) Ieff
dt
(2.137)
so dass wir Gl. (2.134) nun in der Tat als Leistungsbilanzgleichung interpretieren können:
dW
(2.138)
p(t) = RW i(t)2 +
(t)
dt
Als konkrete Beispiele haben wir bereits den Fall der Spule (Gl. (2.132)) und den
Fall des Kondensators (Gl. (2.133)) diskutiert.
(ii) Blindleistung: √
Setzt man i(t) = 2Ieff sin(ωt) in die Bilanzgleichung (2.134) ein, so erhält man
die Darstellung
2
p(t) = Re(Z) Ieff
PW
·
2 sin2 (ωt)
Mittelwert = 1
+
2
Im(Z) Ieff
PB
·
sin(2ωt)
(2.139)
Mittelwert = 0
Der zweite Summand auf der rechten Seite drückt quantitativ die in der Übertragungsstrecke und im Verbrauchernetz hin und her oszillierende Leistung aus, die
meist nur als unerwünschte Leitungsbelastung wahrgenommen wird. Ihr Gewicht
im Vergleich zur Wirkleistung PW wird quantitativ durch die Größe
2
PB := Im(Z) Ieff
(2.140)
ausgedrückt, die man als Blindleistung bezeichnet. In Analogie zu Gl. (2.135)
und Gl. (2.136) wird dann
RB := Im Z
(2.141)
als Blindwiderstand bezeichnet. Die Leistungsbilanzgleichung (2.139) bzw. (2.134)
kann damit in der anschaulich interpretierbaren Form
p(t) = PW (1 − cos(2ωt)) + PB sin(2ωt)
geschrieben werden.
(2.142)
2.4.3 Leistung und Effektivwerte
119
(iii) Vereinheitlichte Darstellung als komplexe Leistung:
Wirk- und Blindleistung lassen sich elegant mit Hilfe der komplexen Leistung
P = U I∗
bestimmen. Mit U = Z · I folgt:
2
P = Z (I · I ∗ ) = Z · Ieff
(2.143)
Das bedeutet, dass die komplexe Leistung P und die Impedanz Z gleichsinnig
parallel (kollinear) zueinander sind. Weiterhin gilt:
2
2
+ j Im(Z) Ieff
P = Re(Z) Ieff
Mit (2.135) und (2.140) folgt
P = PW + jPB
(2.144)
d.h. in der komplexen Leistung sind Wirk- und Blindleistung kompakt zusammengefasst, wobei der Wirkwiderstand RW = Re Z die Wirkleistung und der
Blindwiderstand RB = Im Z die Blindleistung verursacht.
Bisweilen ist auch folgende alternative Darstellung nützlich:
2
P = U I ∗ = U Y ∗ U ∗ = Y ∗ Ueff
(2.145)
(iv) Die Scheinleistung ist ein Maß für die von Wirk- und Blindleistung gemeinsam
verursachte Leitungsbelastung. Sie ist definiert als Betrag der komplexen Leistung
PS = |P | =
2
PW
+ PB2
(2.146)
Die Scheinleistung lässt sich wegen
PS = |P | = |U · I ∗ | = |U | · |I| = Ueff Ieff
(2.147)
auch direkt aus den Effektivwerten von Spannung und Strom bestimmen.
Da die Zeiger der Impedanz Z und der komplexen Leistung P kollinear sind
(vgl. 2.143), folgt weiterhin:
2
PS = |P | = |Z| Ief
f
d.h. der Scheinwiderstand verursacht die Scheinleistung.
(2.148)
120
2.4 Niederfrequente Wechselstromnetzwerke
Die Kollinearität von P und Z hat überdies die Konsequenz, dass die Phasenwinkel
von P und Z übereinstimmen:
arg P = arg Z = Δϕ
Daher hat P auch die Darstellung
P = PS ejΔϕ = PS (cos Δϕ + j sin Δϕ)
mit
tan Δϕ =
(2.149)
Im (Z)
Re (Z)
Hieraus ergeben sich dann Wirk- und Blindleistung gemäß
PW = PS cos Δϕ
(2.150)
PB = PS sin Δϕ
(2.151)
Im
PS
Dj
P =U × I*
PB = PS sin Dj
PW = PS cos Dj
Re
Abbildung 2.39: Wirk-, Blind- und Scheinleistung im Zeigerdiagramm
121
3 Elektromagnetische Wellen in
homogenen Medien
3.1 Grundlegende Aspekte
Die Theorie der elektromagnetischen Wellen basiert unmittelbar auf den Maxwellschen
Gleichungen. Der wesentliche Aspekt hierbei ist, dass der physikalische Raum selbst als
Träger einer physikalischen Größe, nämlich einer elektromagnetischen Welle, fungiert,
die sich prinzipiell unbeschränkt in Raum und Zeit ausbreiten kann und hierbei auch
elektromagnetische Feldenergie mit sich führen und über große Distanzen transportieren
kann. Dies kann im materiefreien Raum (= Vakuum) geschehen; in den meisten technischen Anwendungen geschieht die Wellenausbreitung aber in materiellen Medien, sodass
eine Wechselwirkung zwischen elektromagnetischem Feld und dem Ausbreitungsmedium
stattfindet. Wir wollen uns im Folgenden auf den einfachsten Fall beschränken, indem wir
annehmen, dass das elektromagnetische Feld über drei physikalische Mechanismen mit
dem Ausbreitungsmedium wechselwirkt: die elektrische Polarisation, die Magnetisierung
und den vom elektrischen Feld getriebenen Stromtransport in leitenden Medien.
3.1.1 Modellannahmen
Die genannten Wechselwirkungsmechanismen wollen wir noch weiter präzisieren. Wir
nehmen an, dass das Ausbreitungsgebiet Ω ⊂ R3 der Welle stückweise homogen ist
und aus Teilgebieten Ωi ⊂ R3 zusammengesetzt ist, in denen lineare Materialgesetze mit
konstanten Materialparametern vorausgesetzt werden dürfen. Das Ausbreitungsbebiet Ω
ist also die disjunkte Vereinigung Ω = N
i=1 Ωi von Teilgebieten Ωi , die alle eine konstante
Permittivität εi , konstante Permeabilität μi und (gegebenenfalls) konstante elektrische
Leitfähigkeit σi besitzen. In jedem Teilgebiet Ωi gelten somit lineare Materialgesetze:
122
3.1 Grundlegende Aspekte
(r , t) = ε · E
(r , t)
D
(3.1)
(r , t) = μ · H
(r , t)
B
(3.2)
+
j = σ · E
j 0 (r , t)
externe Quelle
(3.3)
Wir werden später auch Materialgesetze zulassen, bei denen die Materialparameter
(ε,μ,σ) bei einer sinusförmigen Zeitabhängigkeit der Feldgrößen von der Kreisfrequenz
ω der Sinus-Schwingung abhängen können: ε = ε(ω), μ = μ(ω), σ = σ(ω).
Zwischen benachbarten Teilgebieten Ωk und Ωl sollen gemeinsame zweidimensionale
Grenzflächen Σkl = Ω̄k ∩ Ω̄l existieren, auf denen die in Abschnitt 1.4 hergeleiteten
D)
und (H,
B)
gelten.
Übergangs-Randbedingungen für die Feldgrößen (E,
Weitere Modellannahmen sind schließlich:
• keine Raumladung im Inneren von Ωi außer an äußeren (vorgegebenen) Quellen
(z.B. Antennen) mit Stromdichte j 0 ; in diesem Fall muss aber gelten: ρ = ρ0 mit
∂ρ0
div j 0 +
=0
∂t
• Ausbreitungsmedium befindet sich in Ruhe
• keine Beinflussung des Stromflusses durch Magnetfelder (Hall-Effekt, Lorentz-Ablenkung)
• kein Stromfluss durch Teilchendiffusion
• kein Stromfluss durch thermische Diffusion
3.1.2 Differentialgleichungen für propagierende elektromagnetische
Felder (Wellen)
(i) Den Ausgangspunkt für die theoretische Beschreibung elektromagnetischer Wellen
bilden die Maxwellschen Gleichungen Gl. (1.1) - (1.4), wobei die Materialglei und B
zu elimichungen Gl. (3.1) - (3.3) benutzt werden, um die Feldgrößen D
nieren. Man erhält so ein geschlossenes System partieller Differentialgleichungen
H):
für die sechs Komponenten des elektromagnetischen Feldes (E,
3.1.2 Differentialgleichungen für Wellen
123
=−
rot E
= j +
rot H
∂B
∂H
= −μ
∂t
∂t
(3.4)
∂D
+ ε ∂ E + j 0
= σE
∂t
∂t
(3.5)
= ρ0
= 1 div D
div E
ε
ε
(3.6)
=0
= 1 div B
div H
μ
(3.7)
wobei für die externen Quellterme j 0 und ρ0 gilt: div j 0 +
∂ρ0
= 0.
∂t
,H
) zu erhalten,
(ii) Um eine Wellengleichung für die sechs Komponenten von (E
bilden wir zunächst die Rotation von (3.4) :
rot rot E
(3.4)
= −μ rot
(3.5)
∂ 2E
∂H
∂E
˙
− εμ
= −μσ
− μj0
2
∂t
∂t
∂t
∂j 0
˙
wobei j0 :=
gesetzt wird. Andererseits ist
∂t
rot rot E
) = ∇ ∇E
− ΔE
= ∇ ρ0 − ΔE
= ∇ × (∇ × E
ε
Durch Gleichsetzen beider Ausdrücke ergibt sich:
εμ
∂ 2E
∂E
= −∇ ρ0 − μj˙ 0
+
μσ
− ΔE
2
∂t
∂t
ε
Wellengleichung für E
(3.8)
In analoger Weise bilden wir die Rotation von Gl.(3.5):
rot rot H
(3.5)
+ε
= σ rot E
∂
∂H
∂ 2H
+ rot j 0 (3.4)
= −σμ
+ rot j 0
rot E
− εμ
∂t
∂t
∂t2
Andererseits ist
rot rot H
⎛
⎞
+ ∇⎜
⎟
= −ΔH
H
⎝∇
⎠ = −ΔH
0
124
3.1 Grundlegende Aspekte
Durch Gleichsetzen beider Ausdrücke erhalten wir:
εμ
∂ 2H
∂H
= rot j 0
+
μσ
− ΔH
∂t2
∂t
Wellengleichung für H
(3.9)
Beide Wellengleichungen lassen sich kompakt zusammenfassen in einer Wellenglei ,H
):
chung für die Feldgröße (E
#
2
εμ
$
⎛
⎞
⎜E ⎟
⎛
⎜−∇
∂
∂
+ μσ
−Δ ⎝ ⎠=⎝
2
∂t
∂t
H
(gedämpfter) Wellenoperator
(falls σ > 0)
⎞
ρ0
˙
− μj0 ⎟
ε
⎠
rot j 0
(3.10)
,H
) völlig gleichberechtigte Komponenten eines
In dieser Formulierung sind (E
sechskomponentigen elektromagnetischen Wellenfeldes.
Man muss allerdings beachten, dass die Wellengleichung (3.10) eine notwendige,
aber keine hinreichende Bedingung für die Maxwellschen Gleichungen (3.4) - (3.7)
= ρ0 und div H
= 0 als Nebenbedingung
darstellt. Zum Beispiel muss div E
ε
zusätzlich erfüllt sein.
(iii) An einer Materialgrenze Σkl zwischen benachbarten Teilgebieten Ωk und Ωl gelten
die in Abschnitt 1.4 hergeleiteten Grenzflächenbedingungen, nun aber formuliert
und H
:
für die Feldgrößen E
und μH
sind stetig
• Normalkomponenten von εE
(falls keine Grenzflächenladung σint existiert: σint ≡ 0)
und H
sind stetig
• Tangentialkomonenten von E
(falls keine Grenzflächenstromdichte i existiert: i ≡ 0)
3.1.3 Wellengleichung für das elektromagnetische Viererpotential
,B
(i) In Abschnitt 1.3 wurde die Darstellung des elektromagetischen Feldes E
ausführlich erörtert. Demzufolge lassen sich mit
durch ein Viererpotential Φ, A
dem Ansatz
= rot A
= −∇Φ − ∂ A und B
E
∂t
,B
durch die vier Komponenten von Φ, A
dardie sechs Komponenten von E
stellen. In einem (Teil-)Gebiet Ωi mit konstanter Permittivität ε und Permebilität
3.1.4 Physikalischer Mechanismus für die elektromagnetische Wellenausbreitung
125
+ εμ ∂Φ = 0 als Nebenbeüberdies der Lorenzeichung div A
∂t
dingung unterwerfen. Aus den inhomogenen Maxwellschen Gleichungen Gl. (3.5)
und (3.6) folgt dann unter der Annahme, dass das Ausbreitungsmedium elektrisch
nichtleitend ist (σ = 0), die folgende inhomogene Wellengleichung für das Viererpotential (vgl. Gl. (1.42)):
μ kann man Φ, A
#
$
2
εμ
⎛
⎞
⎜Φ⎟
⎛
⎞
⎜ρ0 /ε⎟
∂
−Δ ⎝ ⎠=⎝
⎠
∂t2
A
μj 0
(3.11)
Hierbei bezeichnet j 0 eine im ansonsten isolierenden Gebiet Ωi eingeprägte Strom∂ρ0
=0
quelle (Antenne) mit zugehöriger Ladungsdichte ρ0 derart, dass div j 0 +
∂t
gilt.
mit c := 1/√εμ sind gleichberechtigte Komponenten eines vierkompoΦ/c, A
nentigen elektromagnetischen Potentialwellenfeldes in einer vierdimensionalen Raum-Zeit mit Koordinaten (ct, x, y, z) (⇒ Relativitätstheorie,
vgl. Abs. 1.3.2(ii)).
= 0 für E
und
= ρ und div H
(ii) Man beachte, dass die Nebenbedingungen div E
ε
durch den Potentialansatz identisch erfüllt werden:
H
= 1 div rot A
≡0
• div H
μ
= −ΔΦ − ∂ div A
• div E
∂t
(Eichung)
=
−ΔΦ + εμ
∂2
ρ
Φ=
2
∂t
ε
Es müssen daher
- außer der Eichbedingung selbst - keine weiteren Nebenbedin
gungen von Φ, A erfüllt werden.
3.1.4 Physikalischer Mechanismus für die elektromagnetische
Wellenausbreitung
Die selbstkonsistente Existenz und Fortpflanzung dynamischer elektromagnetischer Felder lässt sich mit Hilfe der Maxwellschen Gleichungen (1.1) - (1.4) und den Materialgleichungen (3.1) - (3.3) recht anschaulich verstehen:
126
(i)
3.2 Homogene Wellengleichung in einer Raumdimension
= − ∂B
rot E
∂t
-Feld ein elektrisches
besagt, dass ein zeitabhängiges B
induziert. Wegen div E
= 0 ist dieses quellenfrei,
Feld E
d.h. es ist ein reines Wirbelfeld.
(ii) α)
= εE
D
besagt: Das elektrische Feld verursacht im dielektrischen
Medium eine (dynamische) elektrische Polarisierung, die
sich dem elektrischen Feld überlagert.
β)
j = σ E
besagt: Das elektrische Feld erzeugt in einem elektrisch leitenden Medium einen ladungsneutralen Teilchenstrom. Wegen div j = 0 ist dieser quellenfrei, d.h.
j ist ein Wirbelstrom. Dieser entzieht dem elektromagnetischen Feld durch Reibungsverluste Energie mit der
= σ|E
|2 > 0, woVerlustleistungsdichte pVerlust = j · E
durch das elektromagnetische Feld gedämpft wird.
(iii)
= j + ∂ D
rot H
∂t
(iv)
= μH
B
-Feld und ggf. der Wirbelbesagt: Das zeitabhängige D
. Wegen div H
=0
strom j erzeugen ein Magnetfeld H
ist dieses quellenfrei, d.h. es ist ein reines Wirbelfeld.
verursacht im Medium eine
besagt: Das Magnetfeld H
-Feld überlagert. Das
Magnetisierung, die sich dem H
-Feld wiederum geht in das Induktionsresultierende B
gesetz (i) ein, wodurch die Schleife der felderzeugenden
Elementarprozesse selbstkonsistent geschlossen wird.
Man beachte, dass der beschriebene Wirkungsmechanismus nicht an das Vorhandensein
eines materiellen Ausbreitungsmediums (“Äther”) gebunden ist. Er funktioniert genau
-Feld und
so gut im leeren Raum (mit ε = ε0 , μ = μ0 und σ = 0), im dem sich das E
-Feld gegenseitig erzeugen:
das H
= −μ0 ∂ H und rot H
= ε0 ∂ E
rot E
∂t
∂t
(3.12)
3.2 Homogene Wellengleichung in einer Raumdimension
3.2.1 Vereinfachende Modellannahmen
Bevor wir die vektorielle Wellengleichung (3.10) bzw (3.11) näher betrachten, wollen wir
einige grundlegende Eigenschaften wellenförmiger Lösungen diskutieren, die unabhängig
von deren Vektorcharakter sind. Wir machen daher folgende vereinfachende Annahmen:
3.2.2 Grundlösungen
127
• Nur eine Raumdimension: r = xe x
x ∈ R,
mit
∂2
Δ=
.
∂x2
• Das Wellenfeld u(x, t) sei ein Skalar oder eine der kartesischen Komponenten eines
Vektorfeldes
• keine Dämpfung: σ = 0
• keine äußeren Quellen: j 0 = 0, ρ0 = 0
Die Wellengleichung lautet dann in vereinfachter Form:
μ
∂ 2u ∂ 2u
− 2 =0
∂t2
∂x
(3.13)
3.2.2 Grundlösungen
(i) Ausbreitungsgeschwindigkeit
Wir definieren zunächst die Größe
1
c := √
μ
(3.14)
(Merkregel: μc2 = 1).
c hat die physikalische Einheit einer Geschwindigkeit [m/s]. Es wird sich im Folgenden zeigen, dass c die Geschwindigkeit ist, mit der sich wellenförmige Lösungen u(x, t) von (3.13) im Raum ausbreiten; daher heißt sie Ausbreitungsgeschwindigkeit oder auch Phasengeschwindigkeit. Ihr Vakuumwert ist
m
km
≈ 300.000
.
c = 2, 997 × 108
s
s
(ii) D’Alembertsche Lösung
Die homogene Wellengleichung (3.13) hat nun die Form
1 ∂2
∂2
−
u(x, t) = 0
c2 ∂t2 ∂x2
Um sie zu lösen, führen wir neue unabhängige Variablen
ξ(x, t) := x − ct;
η(x, t) := x + ct
(3.15)
128
3.2 Homogene Wellengleichung in einer Raumdimension
im (x, t)-Raum (= R2 ) ein. Die Umkehrtransformation
R2 (ξ, η) → (x(ξ, η), t(ξ, η)) ∈ R2
definiert also Koordinaten (ξ, η) im (x, t)-Raum. In diesen Koordinaten hat die
Lösung u die Form
u(ξ, η) := u(x(ξ, η), t(ξ, η))
Die Umrechnung des Wellenoperators geschieht folgendermaßen:
∂
∂ξ ∂
∂η ∂
∂
∂
=
·
+
·
=
+
∂x ∂x ∂ξ ∂x ∂η
∂ξ ∂η
1∂
1 ∂ξ ∂
1 ∂η ∂
∂
∂
=
·
+
·
=− +
c ∂t c ∂t ∂ξ c ∂t ∂η
∂ξ ∂η
⇒
∂2
∂2
∂2
∂2
∂2
∂2
∂2
∂2
1 ∂2
−
=
+
−
2
−
−
2
−
=
−4
c2 ∂t2 ∂x2 ∂η 2 ∂ξ 2
∂ξ∂η ∂η 2 ∂ξ 2
∂ξ∂η
∂ξ∂η
Damit bekommt die Wellengleichung (3.15) die Form
∂ ∂
∂ ∂
u(ξ, η) =
u(ξ, η) = 0
∂ξ ∂η
∂η ∂ξ
Die allgemeine Lösung lautet:
u(ξ, η) = f1 (ξ) + f2 (η)
mit beliebigen zweimal differenzierbaren Funktionen f1 : R → R und f2 : R → R.
Umgerechnet in die (x, t)-Koordinaten erhält man so
u(x, t) = f1 (x − ct) + f2 (x + ct)
(3.16)
D’Alembertsche Lösung
Man kann diese Lösung leicht verifizieren:
∂ 2u
=
f
(x
−
ct)
+
f
(x + ct)
1
2
∂x2
,
1 + 1 ∂ 2u
2
2
=
f
(x
−
ct)
·
(−c)
+
f
(x
+
ct)
·
c
1
2
c2 ∂t2
c2
=
∂ 2u
∂x2
q.e.d.
3.2.2 Grundlösungen
129
u
D x = ct
f1 (x )
f1 (x - ct )
x
f 2 (x + ct )
f 2 (x )
D x = -ct
Abbildung 3.1: Zeitliche Entwicklung der D’Alembertschen Lösung im Ortsraum.
(iii) Diskussion
• Für t = 0 gilt u(x, t = 0) = f1 (x) + f2 (x). Zu einer Zeit t > 0 ist f1 (x) um
Δx = ct nach +e x und f2 (x) um Δx = −ct nach −e x parallel verschoben:
u(x, t) = f1 (x − ct) + f2 (x + ct)
• Hieraus ergibt sich die Ausbreitungsgeschwindigkeit beider Teillösungen als
Δx
v=
= ±c.
t
• Offenkundig können sich die Teillösungen ungestört durchdringen, wenn sie
aufeinander zulaufen, sich “treffen” und wieder auseinander laufen.
• Auf den Geraden im (x, t)-Raum
x − ct = const. bzw. x + ct = const. (den sogenannten Charakteristiken)
haben f1 bzw. f2 immer denselben Wert.
x
x + ct = const.
x - ct = const.
t
Abbildung 3.2: Charakteristiken der eindimensionalen Wellengleichung
130
3.3 Ebene Wellen im dreidimensionalen Raum
3.3 Ebene Wellen im dreidimensionalen Raum
3.3.1 Grundlösungen der vektoriellen Wellengleichung in R3
(i) Wir wollen nun das Konstruktionsprinzip der D’Alembertschen Lösung (3.16) auf
den dreidimensionalen Raum übertragen. Überdies betrachten wir nun vektorwer (also Gl. (3.8)). Zur
tige Lösungen, zunächst exemplarisch das elektrische Feld E
Vereinfachung nehmen wir aber weiterhin an:
• keine Dämpfung: σ = 0
• keine Quellen: ρ0 = 0, j 0 = 0
Daher muss wegen Gl. (3.6) das elektrische Feld die Nebenbedingung
=0
• div E
erfüllen.
(ii) Die Verallgemeinerung der D’Alembertschen Lösung auf drei Raumdimensionen
geschieht folgendermaßen:
Statt e x betrachten wir nun eine beliebige Ausbreitungsrichtung n ∈ R3 , |n | = 1,
und die Gerade durch den Ursprung G = {r = αn |α ∈ R}. Die Ebenen senkrecht
zu G haben die Darstellung E(d) = {r ∈ R3 |n · r = d}, wobei d den Abstand
(r , t) soll
zum Ursprung bezeichnet. Die gesuchte Lösung der Wellengleichung E
(r , t) darf bezüglich r nur vom
auf jeder Ebene E(d) konstant sein; das heißt, E
Ebenenabstand d(r ) = n · r abhängen.
(r , t = 0) (“Startlösung”) also schreiben als
Zum Zeitpunkt t = 0 kann man E
(r , t = 0) = E
0 (d(r )) = E
0 (n · r )
E
0 (.) : R → R3 eine beliebige zweimal differenzierbare Funktion einer reellen
wobei E
Variablen bezeichnet. Der Schnittpunkt der Geraden G mit der Ebene E(d) ist
(r , t = 0) gemäß E
= E
0 (d); dies
r = dn . Durchläuft man G, ändert sich E
entspricht der Funktion f1 (x) der eindimensionalen D’Alembertschen Lösung in
(r , t) erhält man, indem man E
0 (d) um die
(3.16). Den weiteren Zeitverlauf von E
Länge ct in Richtung von +n parallel verschiebt, also
(r , t) = E
0 (d(r ) − ct) = E
0 (n · r − ct)
E
(3.17)
Diese Konstruktion lässt sich für jeden Einheitsvektor n ∈ R3 , |n | = 1, durchführen. Insbesondere erhält man die der zweiten Funktion f2 (x) in Gl. (3.16) entsprechende dreidimensionale Funktion, indem man die Richtung von n umkehrt.
3.3.1 Grundlösungen der vektoriellen Wellengleichung in R3
131
(iii) Nun ist zu verifizieren, dass der Ansatz (3.17) tatsächlich eine Lösung der homogenen Wellengleichung (3.8) (mit σ = 0) darstellt. Hierzu ist folgende Rechenregel
nützlich: Sind (n1 , n2 , n3 ) und (E01 (.), E02 (.), E03 (.)) die kartesischen Komponenten
0 (.), so gilt:
von n und E
∂
E0k (n · r − ct) = nj E0k
(n · r − ct)
∂xj
(3.18)
(.) die (gewöhnliche) Ableitung von E0k (.) nach seinem skalaren Arguwobei E0k
ment bezeichnet. Analog dazu gilt für die Zeitableitung:
∂
(n · r − ct)
E0k (n · r − ct) = −c E0k
∂t
(3.19)
Damit erhalten wir:
0 (n · r − ct) =
ΔE
3
∂2
3
j=1 ∂xj
j=1
(n · r − ct) =
E
2 0
(n · r − ct)
n2j E
0
(n · r − ct) = E
(n · r − ct)
= n 2 E
0
0
und
also
∂2 (n · r − ct)
E0 (n · r − ct) = (−c)2 E
0
∂t2
#
$
∂2
0 (n · r − ct) = (μc2 − 1)E
(n · r − ct) = 0
μ 2 − Δ E
0
∂t
wegen μc2 = 1 (vgl. Def. (3.14)).
Dies war zu beweisen.
(r , t) = E
0 (n · r − ct) die Nebenbedingung div E
= 0 erfüllt,
(iv) Damit der Ansatz E
muss zusätzlich gelten:
(r , t) =
div E
3
∂
j=1
∂xj
E0j (n · r −ct) =
3
(n · r −ct) = 0
nj E0j
(n · r −ct) = n · E
0
!
j=1
0 (.) eine Konstante = 0 (d.h. ein statisches Feld, also für die
Also ist entweder n · E
0 (.) = 0, d.h. E
0 (.) steht stets senkrecht
Wellenausbreitung irrelevant) oder n · E
zu n . Wir müssen also fordern
0 (.) · n = 0 ,
E
0 (.) ⊥ n
d.h. E
(3.20)
0 (.) senkrecht auf der Ausbreitungsrichtung n steht, spricht man von einer
Da E
“transversalen ebenen Welle”.
132
3.3 Ebene Wellen im dreidimensionalen Raum
(v) Allgemeine Darstellung transversaler ebener Wellen:
Man erhält aus dem Ansatz (3.17) dieselbe Lösungsmenge, wenn man das Argument n · r − ct mit einem konstanten Faktor k > 0 multipliziert:
k(n · r − ct) = (k · r − ωt)
mit k := kn und ω := kc
Stets muss hierbei gelten:
1
ω
=c= √
μ
|k |
(3.21)
k heißt Ausbreitungsvektor oder Wellenvektor, weil er in die Richtung n
weist, in die die Welle sich bewegt. Die allgemeinere Form einer ebenen transversalen Welle lautet nunmehr:
(r , t) = E
0 (k · r − ωt)
E
(3.22)
k · E
0 (.) = 0
(3.23)
wobei
gelten muss.
Bewegt man die senkrecht zur Ausbreitungsrichtung n bzw. k stehenden Ebenen E(d) = {r ∈ R3 |n · r = d} mit der Ausbreitungsgeschwindigkeit c in die
+n -Richtung, so nennt man sie Phasenebenen Φ(t):
Φ(t) = E(d0 + ct) = {r ∈ R3 |n · r − ct = d0 }
= {r ∈ R3 |k · r − ωt = kd0 }
(3.24)
0 (r , t) auf einer Phasenebene konstant (per conOffenkundig ist das Wellenfeld E
structionem!):
(r , t) = E
0 (k · r − ωt) = E
0 (kd0 ) = constans für r ∈ Φ(t)
E
3.3.2 Ebene elektromagnetische Wellen
133
r
k
F (t + Dt )
Ds
.
r
E0
Ds
=c
Dt
Phasenebene F (t )
Abbildung 3.3: Wellenvektor und Phasenebenen
3.3.2 Ebene elektromagnetische Wellen
(r , t) des elektromagnetischen FelBislang haben wir nur die elektrische Komponente E
(r , t) dieselbe homogene Wellengleides betrachtet. Da die magnetische Komponente H
(r , t) erfüllt (vgl. Gl. (3.10) mit σ = 0) und auch dieselbe Nebenbedingung
chung wie E
= 0, können wir einen analogen Ansatz machen. Dann gilt:
div H
(r , t) = E
0 (k · r − ωt) mit k · E
0 (.) = 0
E
(r , t) = H
0 (k · r − ωt) mit k · H
0 (.) = 0
H
lösen die homogene Wellengleichung (3.10) für σ = 0 mit den Nebenbedingungen
= div H
= 0.
div E
Zusätzlich muss aber gelten:
= −μ ∂ H
rot E
∂t
= ∂E
rot H
∂t
Mit Hilfe der Rechenregeln (3.18) und (3.19) lässt sich folgern:
k × E
(.) = +μω H
(.)
0
0
k × H
(.) = −ω E
(.)
0
0
(.) bzw. H
(.) die (gewöhnliche) Ableitung der vektorwertigen
Hierbei bezeichnet E
0
0
0 (.) bzw. H
0 (.) nach ihrem skalaren Argument.
Funktion E
134
3.3 Ebene Wellen im dreidimensionalen Raum
Integriert man diese beiden Gleichungen, so ergibt sich bis auf eine Integrationskonstante:
0 (.) = 1 k × E
0 (.)
H
μω
(3.25)
0 (.)
0 (.) = − 1 k × H
E
ω
(3.26)
r
E0
r
k
r
H0
- und H
-Feld bei einer ebenen elektroAbbildung 3.4: Beziehung zwischen E
magnetischen Welle
Die Integrationskonstanten sind statische Felder, die für die Wellenausbreitung irrelevant
sind und deshalb zu Null gesetzt werden. Man erkennt, dass durch die Wahl der Funktion
0 (.) festgelegt wird und umgekehrt. Die Frage ist jedoch, ob
0 (.) auch das Magnetfeld H
E
0, H
0 ), das die Gleichungen (3.25) und
das homogene lineare Gleichungssystem für (E
(3.26) bilden, überhaupt eine von Null verschiedene Lösung besitzt. Statt (mühsam)
dessen Determinante auszurechnen ist es einfacher, (3.26) in (3.25) einzusetzen und
0 zu eliminieren:
hierbei E
0 = 1 k × E
0
0 = 1 k × − 1 k × H
0 = 1 k 2 H
H
μω
μω
ω
μω 2
0 =
Diese Gleichung besitzt eine Lösung H
0 genau dann, wenn die Bedingung
k 2 1
·
=1
ω 2 μ
erfüllt ist. Dies ist aber der Fall (siehe Gl. (3.21):
1
ω
=c= √
μ
|k |
3.3.3 Energiedichte und Leistungsfluss ebener EM-Wellen
135
Hätten wir diese Bedingung nicht schon im Ansatz berücksichtigt, würde sie als Lösbarkeitsbedingung für das Gleichungssystem (3.25)/(3.26) nun erzwungen werden und
lauten:
1
ω(k ) = √ |k |
μ
(3.27)
Dispersionsrelation eines homogenen linearen Mediums
0 (.) und H
0 (.)
Die in Gl. (3.25) und (3.26) beschriebene starre Kopplung zwischen E
lässt sich mit Hilfe des Wellenwiderstandes
-
Z :=
μ
(3.28)
noch klarer formulieren. Es gilt nämlich
!
√
k
μ
1
1
=
n =
n =
n = n
μω
μc
μ
μ
Z
√
k
μ
μ
1
=
n =
n =
n = Z n
ω
c
- und H
-Feld nunmehr:
Damit lautet der Zusammenhang zwischen E
0 (.) = 1 n × E
0 (.)
H
Z
(3.29)
0 (.)
0 (.) = −Zn × H
E
(3.30)
0 |/|H
0|
Der Wellenwiderstand drückt also das Verhältnis der Feldamplituden
Z = |E
!
μ0
= 376, 9 Ω.
aus. Der Vakuumwert des Wellenwiderstandes beträgt Z0 =
0
3.3.3 Energiedichte und Leistungsfluss ebener EM-Wellen
(i) Wir wollen die in Abschnitt 1.2.4 diskutierte Energiebilanz des elektromagnetischen Feldes auf den Fall einer ebenen Welle spezialisieren. Die elektrische Energiedichte ist nach Gl. (1.15)
wel (r , t) =
1 r − ωt)2
E ·D = E
0 (k · 2
2
(3.31)
136
3.3 Ebene Wellen im dreidimensionalen Raum
und die magnetische Energiedichte beträgt nach Gl. (1.23)
wmag (r , t) =
1 μ r − ωt)2
H ·B = H
0 (k · 2
2
(3.32)
Aus Gl. (3.29) folgt:
μ2 μ 1
0 |2 = E
2
|n × E
H0 =
2
2
2Z
2 0
d.h. die elektrische und die magnetische Energiedichte sind gleich groß:
(3.33)
wel = wmag
Deshalb ergibt sich für die gesamte elektromagnetische Energiedichte
0 (k · r − ωt)2 = μH
0 (k · r − ωt)2
welmag (r , t) = wel + wmag = E
(3.34)
(ii) Die Leistungsflussdichte ist durch den Poyntingvektor gegeben (vgl. Abs. 1.2.4):
S
0 × n × E
×H
= 1 E
0
= E
Z
(1.31)
=
1 2
0 E
2 · n
0 = 1 E
E0 · n − n · E
Z
Z 0
oder ausführlich geschrieben:
(r , t) = 1 |E
0 (k · r − ωt)|2 n
S
Z
(3.35)
Dieser Ausdruck hat eine sehr anschauliche Interpretation: Der Leistungsfluss erfolgt in +n -Richtung mit der Ausbreitungsgeschwindigkeit u = c · n , wobei die
Energiedichte welmag transportiert wird:
!
=
S
ε 1 2
ε|E0 | n = welmag · c · n
με
(3.36)
(iii) Wir wollen schließlich noch die allgemeine Energiebilanz (1.30) für den Fall einer
elektromagnetischen ebenen Welle verifizieren: Mit Hilfe der Rechenregeln
∂
F (k · r − ωt) = kj F (k · r − ωt)
∂xj
(3.37)
∂ F (k · r − ωt) = −ωF (k · r − ωt)
∂t
(3.38)
3.3.4 Harmonische ebene elektromagnetische Wellen im 3D-Raum
137
folgt:
(r , t) =
div S
2|k | 1 2E0 · E0 (k · r − ωt) k · n =
E0 · E0 (k · r − ωt)
Z
Z
∂welmag
(k · r − ωt)
0 · E
(r , t) = − 2 ω E
0
∂t
√
ω μ
|k |
ω 1
Wegen
=
= μ = ω folgt schließlich
Z
c Z
∂welmag
=0
+ div S
∂t
(3.39)
3.3.4 Harmonische ebene elektromagnetische Wellen im 3D-Raum
3.3.4.1 Linear polarisierte harmonische elektromagnetische Wellen
(i) In technischen Anwendungen spielen solche elektromagnetische Wellen eine wichti 0 (.) im D’Alembertschen Ansatz (3.22) (und
ge Rolle, bei denen die Formfunktion E
0 (.)) eine sinusförmige Gestalt haben (sogenannte
wegen (3.30) auch H
“harmonische” ebene Wellen). Für einen vorgegebenen Ausbreitungsvektor
k = k n wählt man einen konstanten Amplitudenvektor E
0 senkrecht zu k (also
k · E
0 = 0) und bildet
(r , t) = E
0 cos(k · r − ωt − ϕ)
E
(3.40)
(r , t) = H
0 cos(k · r − ωt − ϕ)
H
(3.41)
0
0 := 1 n × E
mit H
Z
(3.42)
und ω = c |k | = c k
vgl. (3.27)
0 und H
0 nunmehr konstante Vektoren sind. Wegen k · E
0 = 0
Man beachte, dass E
= div H
= 0 identisch
0 = 0 sind die Transversalitätsbedingungen div E
und k · H
erfüllt, und ω = c k trägt der Lösbarkeitsbedingung (3.27) (Dispersionsrelation)
0 ist so gewählt, dass (E
0, H
0 ) das Gleichungssystem (3.29/3.30) erRechnung. H
138
3.3 Ebene Wellen im dreidimensionalen Raum
füllen. Die Phase ϕ ∈ R ist frei wählbar. Eine derart konstruierte EM-Welle wird
als linear polarisierte harmonische ebene Welle bezeichnet (siehe Abb. 3.5).
r
E0
r
H0
r
E
l
r
n
r
H
r 2p r
k= n
l
Abbildung 3.5: Harmonische ebene elektromagnetische Welle
(ii) Für harmonische ebene Wellen sind folgende Bezeichnungen bzw. Kenngrößen eingeführt:
!
• Wellenlänge λ: Für Δr = λn muss k · Δr = |k |λ = 2π gelten ⇒
λ=
2π
2π
bzw. k =
n
λ
|k |
(3.43)
• Kreiswellenzahl k:
2π
k = |k | =
λ
(3.44)
!
• Schwingungsdauer (Periode) T : ωT = 2π
T =
2π
2π
bzw. ω =
ω
T
(3.45)
ν :=
1
T
(3.46)
• Frequenz ν:
⇒
ω = 2πν
• Kreisfrequenz ω: Durch Dispersionsrelation festgelegt:
ω(k ) = c k
⇔
λν = c
⇔
λ = cT
(3.47)
3.3.4 Harmonische ebene elektromagnetische Wellen im 3D-Raum
139
• “Inverse” Dispersionsrelation
k (ω) = ω n = ω √εμ n
c
(3.48)
3.3.4.2 Elliptisch polarisierte harmonische elektromagnetische Wellen
(i) Der Ansatz (3.40) - (3.42) lässt sich dahingehend erweitern, dass man zulässt,
(r , t) und H
(r , t) in den Ebenen E(d)
dass sich die Richtung der Feldvektoren E
senkrecht zur Ausbreitungsrichtung n zeitperiodisch ändert. Die Spitzen der Feldvektoren bewegen sich hierbei - starr gekoppelt über Gl. (3.29) und Gl. (3.30) auf Ellipsen; man spricht daher von “elliptischer Polarisation”.
Zur mathematischen Beschreibung solcher Wellen wählt man zwei orthonormierte
Vektoren e 1 und e 2 senkrecht zu n derart, dass (e 1 , e 2 , n ) ein orthonormiertes
Rechtssystem in R3 bilden. e 1 und e 2 spannen also die Ebenen senkrecht zu n
(r , t) und H
(r , t) in dieser Basis darstellen. Eiauf, und deshalb kann man E
ne elliptisch polarisierte Welle erhält man als Linearkombination (Superposition)
zweier linear in e 1 - Richtung bzw. e 2 - Richtung polarisierter ebener Wellen gemäß
Gl. (3.40) - (3.42), deren Phasenwinkel ϕ1 und ϕ2 eine Phasendifferenz ϕ2 − ϕ1 = 0
aufweisen:
(r , t) = E01 e 1 cos(k · r − ωt − ϕ1 )
E
+ E02 e 2 cos(k · r − ωt − ϕ2 )
(3.49)
(r , t) = 1 n × E
(r , t)
H
Z
Die Amplituden E01 und E02 können o.B.d.A. positiv gewählt werden:
E01 ≥ 0 und E02 ≥ 0.
(ii) Spezialfälle sind:
• ϕ1 = ϕ2 = ϕ:
Man erhält eine linear polarisierte Welle mit raumfestem Amplitudenvektor
0 = E01 e 1 +E02 e 2 . Die Ellipse entartet zu einer gerader Strecke (Abb. 3.6).
E
π
und E01 = E02 = E0 :
2
Die Ellipse wird ein Kreis mit Radius
E0 (Abb. 3.6); man erhält eine zirkular
polarisierte Welle: E (r , t) = E0 cos(k · r − ωt)e 1 ± sin(k · r − ωt)e 2
• ϕ1 = ϕ2 ±
Mit Blickrichtung entlang des Ausbreitungsvektors k = k n spricht man von
“linksdrehender” oder “rechtsdrehender” zirkularer Polarisation.
140
3.3 Ebene Wellen im dreidimensionalen Raum
r
e1
r
e1
r
E
w
r
E
r
e2
zirkular (linksdrehend) polarisiert
r
e2
linear polarisiert
Abbildung 3.6: Zur Polarisation von Wellen
3.3.4.3 Komplexe Darstellung harmonischer elektromagnetischer Wellen
(i) Unabhängige Freiheitsgrade einer harmonischen EM-Welle:
Um eine elektromagnetische harmonische ebene Welle zu beschreiben, sind folgende
Parameter erforderlich:
• Ausbreitungsrichtung: n ∈ R3 , |n | = 1 (2 Parameter)
ω
2π
oder |k | = (1 Parameter)
• Wellenlänge oder Frequenz: |k | = k =
λ
c
Beide Größen lassen sich gemeinsam durch den Ausbreitungsvektor k ∈ R3 spezifizieren: k = k n (3 Parameter)
• Amplituden E01 und E02 der elektrischen Feldkomponente (vgl. (3.49)) oder
alternativ die Amplituden H01 und H02 der magnetischen Feldkomponente
(2 Parameter)
• Phasenwinkel ϕ1 und ϕ2 (2 Parameter)
Insgesamt sind also sieben reelle Parameter erforderlich, um eine harmonische EMWelle zu beschreiben.
(ii) Diese sieben Parameter lassen sich sehr elegant in eine komplexe Schreibweise
kleiden:
3.3.5 Darstellung beliebiger EM-Wellen durch harmonische ebene Wellen
141
Die elliptisch polarisierte Welle in Gl. (3.49) kann man darstellen als
(r , t) = Re {(E01 e−jϕ1 e 1 + E02 e−jϕ2 e 2 ) ej(k · r −ωt) }
E
Ê01 ∈ C
Ê02 ∈ C
(3.50)
ˆ
3
ˆ
E
0 ∈ C mit k · E0 = 0
Die sieben reellen Parameter sind hier in die Größen k ∈ R3 und Ê01 , Ê02 ∈ C
“verpackt”.
ˆ
ˆ 0 := 1 n × E
Mit H
0 folgt dann die äußerst kompakte Darstellung
Z
ˆ j(k · r −ωt)
(r , t) = Re { E
E
}
0e
(3.51)
(r , t) = Re { H
ˆ 0 ej(k · r −ωt) }
H
(3.52)
3.3.5 Darstellung beliebiger elektromagnetischer Wellen durch
harmonische ebene Wellen
Die in komplexer Darstellung ausgedrückten ebenen Wellen (3.51)/(3.52) können als
Basis zur Darstellung beliebiger elektromagnetischer Wellen benutzt werden, indem man
(kontinuierliche) Linearkombinationen davon bildet. Der “Summationsindex” ist hierbei
der Wellenvektor k ∈ R3 , der als unabhängige Variable betrachtet wird. Hierzu passend
ˆ
werden “Entwicklungskoeffizienten” E(k ) ∈ C3 gewählt, die der Nebenbedingung
ˆ k · E(
k) = 0
(3.53)
ˆ k ) = 1 n × E(
ˆ k )
H(
Z
(3.54)
genügen müssen. Außerdem wird
gesetzt. Schließlich muss noch wegen der Lösbarkeitsbedingung (3.27)
ω = ω(k ) = c |k |
(3.55)
gesetzt werden.
Es lässt sich mathematisch begründen, dass jede “vernünftige” elektromagnetische Welle
142
3.3 Ebene Wellen im dreidimensionalen Raum
als “kontinuierliche Linearkombination”
⎛
⎞
⎝
⎠ = Re
r , t)
⎜ E (
⎟
(r , t)
H
R3
⎛
⎞
ˆ E(
k ) ⎟ j(k · r −ω(k )t) 3
⎜
dk
⎝1
⎠ ·e
ˆ
n × E(k )
Z
(3.56)
dargestellt werden kann. Die Begründung liefert die Theorie der Fouriertransformation,
derzufolge jede “glatte” Funktion f : R → R durch ihre Fouriertransformierte fˆ : R → C
dargestellt werden kann gemäß
f (x) =
R
fˆ(k) ejkx dk
(3.57)
Die vierdimensionale Verallgemeinerung für die Variablen (x1 , x2 , x3 , t) lautet dann, dass
f : R4 → R durch fˆ : R4 → C dargestellt werden kann als
f (x1 , x2 , x3 , t) =
fˆ(k1 , k2 , k3 , ω) ej(k1 x1 +k2 x2 +k3 x3 −ωt) dk1 dk2 dk3 dω
(3.58)
R4
,H
).
Dies gilt für jede der sechs Komponenten von (E
Außerdem ist bei der Integration über (k , ω) die Dispersionsrelation ω = ω(k ) = c |k |
zu beachten (man darf also nur über die 3-dimensionale Kegelfläche ω = c |k | im R4
integrieren). Dies wird durch eine Deltafunktion δ(ω − ω(k )) bei der (k , ω)-Integration
sichergestellt. Damit ergibt sich
⎛
⎞
⎝
⎠ = Re
r , t)
⎜ E (
⎟
(r , t)
H
R4
⎛
⎞
ˆ ⎜ E(k , ω) ⎟ j(k · r −ωt)
δ((ω − ω(k )) dω d3 k
⎝
⎠ ·e
ˆ
k , ω)
H(
(3.59)
Nach Ausführen der Integration über ω ergibt sich die Fourierdarstellung (3.56).
3.3.6 Grundgleichungen in Fourierdarstellung
(r , t) und H
(r , t) im Orts-Zeit-Bereich durch ihre Fourier(i) Die Darstellung von E
ˆ
ˆ k , ω) im Ortsfrequenz-Zeitfrequenz-Bereich (k -ωkoeffizienten E(k , ω) und H(
Bereich) gemäß Gl. (3.59) lässt sich in analoger Weise auf alle anderen Feldgrößen
übertragen, und dies grundsätzlich auch im Falle der inhomogenen Maxwellgleichungen (3.4) - (3.7) mit vorgegebenen Quellen ρ0 (r , t) und j 0 (r , t), sodass die
Lösbarkeitsbedingung (=Dispersionsrelation) ω = ω(k ) = c · |k | für freie Wellen
nicht erfüllt sein muss. Wir interessieren uns hier aber für die Ausbreitungsbedingungen im quellfreien Ausbreitungsmedium, also ρ0 = 0 und j 0 = 0, wobei wir
nun aber eine endliche Leitfähigkeit σ ≥ 0 zulassen. Dies führt zu einer Modifikation der Dispersionsrelation ω = ω(k ), die noch selbstkonsistent zu bestimmen
sein wird. Wir können aber weiterhin die Fourierdarstellung (3.56) benutzen und
3.3.6 Grundgleichungen in Fourierdarstellung
143
die hierzu analoge Darstellung:
⎛
⎞
r , t)
⎜D (
⎟
⎝
(r , t)
B
⎠ = Re
R3
⎛
⎞
ˆ ⎜ D(k )⎟ j(k · r −ω(k )t) 3
dk
⎝
ˆ ⎠ ·e
B(
k)
(3.60)
Die Materialgleichungen (3.1) und (3.2) übertragen sich auf die Fourierkoeffizienten
wie folgt:
ˆ ˆ
ˆ
D(
ˆ k )
k ) = E(k ) und B(k ) = μ H(
(3.61)
(ii) Erweiterung der Materialgleichungen für dispersive Medien
In vielen Materialien sind die Materialparameter ε, μ und σ frequenzabhängig:
ε = ε(ω), μ = μ(ω), σ = σ(ω). Dies bedeutet, dass für eine “monochromatische”
ebene Welle (3.51) / (3.52) die Feldamplituden folgenden erweiterten linearen Bedingungen genügen:
ˆ ˆ
D(
k ) = (ω(k )) E(k )
(3.62)
ˆ B(
ˆ k )
k ) = μ(ω(k )) H(
(3.63)
ˆ ˆj(k ) = σ(ω(k )) E(
k)
(3.64)
ˆ
wobei die Fourierkoeffizienten der Stromverteilung j(k ) durch
j (r , t) = Re { ˆj(k ) e[j (k · r −ω(k )t)] d3 k}
R3
defininiert sind. Wie schon erwähnt, muss die Dispersionsrelation ω = ω(k ) noch
selbstkonsistent bestimmt werden.
(iii) Homogene Maxwellsche Gleichungen in Fourierdarstellung
Bei der Fourierdarstellung (3.58) gelten für die Funktion f (r , t) und deren Fouriertransformierte fˆ(k , ω) folgende Korrenspondenzen:
∂
f (r , t) jkl fˆ(k , ω)
∂xl
(3.65)
∂
f (r , t) −jω fˆ(k , ω)
(3.66)
∂t
Im Nabla-Kalkül korrespondiert daher eine algebraische Produkt-Verknüpfung der
144
3.3 Ebene Wellen im dreidimensionalen Raum
ˆ
im Ortsraum mit der Fouriertransformierten jk ◦ U
Form ∇ ◦ U
im k -Raum,
insbesondere
ˆ (r ) = ∇ × U
(r ) jk × U
rot U
(k )
(3.67)
ˆ (r ) = ∇ · U
(r ) jk · U
div U
(k )
(3.68)
Mit diesen Rechenregeln kann man die Maxwellschen Gleichungen für die Fourierkoeffizienten der Feldgrößen wie folgt formulieren:
=−
• rot E
∂B
∂t
ˆ
ˆ k ), also:
jk × E(k ) = jωμ(ω) H(
ˆ k × E(
ˆ k )
k ) = ω(k )μ(ω(k )) H(
=0
• div D
ˆ
jk · ε(ω) E(k ) = 0, also:
ˆ k · E(
k) = 0
= j + ∂ D
• rot H
∂t
(3.69)
(3.70)
ˆ ˆ
ˆ k ) = σ(ω) E(
jk × H(
k ) − jω(ω) E(k )
#
$
σ(ω) ˆ E(k )
= −jω (ω) + j
ω
=: (ω)
Mit der Definition der komplexen Dielektrizitätskonstanten
ε(ω) := (ω) + j
σ(ω)
ω
(3.71)
folgt:
ˆ k × H(
ˆ k ) = −ω(k )(ω(k )) E(
k)
=0
• div B
(3.72)
ˆ k ) = 0, also:
jk · μ(ω) H(
k · H(
ˆ k ) = 0
(3.73)
3.3.6 Grundgleichungen in Fourierdarstellung
145
(iv) Dispersionsrelation
Das aus Gl. (3.69) und (3.72) gebildete homogene lineare Gleichungssystem für
ˆ E(
ˆ k ) sieht formal genauso aus wie das für nicht-dispersive Medien
k ) und H(
(vgl. (3.25) und (3.26)) mit dem Unterschied, dass die Materialparameter nun frequenzabhängig sind und die konstante reelle Permittivität ε durch die komplexe
Permittivität ε(ω) zu ersetzen ist. Die Frage, unter welcher Bedingung dieses homogene Gleichungssystem eine von Null verschiedene Lösung besitzt, lässt sich also
in analoger Weise beantworten:
Aus
k × (k × H)
ˆ
ˆ = k (k · H)
ˆ −k 2 · H
ˆ = −k 2 H
0
und
folgt:
ˆ (3.69)
k × (k × H)
ˆ (3.72)
ˆ
= −ω ε(ω)k × E = −ω 2 ε(ω)μ(ω) H
+
,
k 2 − ω 2 ε(ω)μ(ω) H(
ˆ k ) = 0
ˆ k ) = 0 ist also nur möglich für ω 2 ε(ω)μ(ω) =! k 2 . Dies führt auf
Eine Lösung H(
die komplexe Dispersionsrelation
ω(k )2 =
1
k 2
ε(ω(k ))μ(ω(k ))
(3.74)
Diese Beziehung verallgemeinert Gl. (3.27) auf den Fall dispersiver und, falls σ = 0
gilt, dissipativer Medien. Für einen gegebenen Ausbreitungsvektor k stellt die
komplexe Dispersionsrelation eine implizite Gleichung für ω(k ) dar, aus der dann
die explizite Beziehung ω = ω(k ) abzuleiten ist.
Ist das Medium ein Isolator (σ = 0), so erhält man für einen reellen Ausbreitungsvektor k = kn ∈ R3 eine (oder mehrere) reelle Lösungen ω(k ), also räumlich wie
zeitlich ungedämpfte Wellen.
Ist das Medium elektrisch leitend, hat ε(ω) einen von Null verschiedenen Imaginärteil. Für einen reellen Ausbreitungsvektor k ∈ R3 muss ω(k ) komplex sein, also
ω(k ) ∈ C mit Im (ω(k )) = 0. Dies beschreibt eine zeitlich gedämpfte Welle, die
mit der inversen Zeitkonstanten τ −1 = −Im (ω(k )) abklingt.
Will man zeitlich ungedämpfte Wellen erhalten, also ω(k ) ∈ R, so muss der Wellenvektor k komplex gewählt werden. Für eine reelle Ausbreitungsrichtung n ∈ R3 ,
|n | = 1 führt der Ansatz k = k n mit k ∈ C durch Auflösen von (3.74) nach
k 2 = k 2 auf die “inverse Dispersionsrelation“
k(ω)
=
(ω)μ(ω) ω
(3.75)
146
3.3 Ebene Wellen im dreidimensionalen Raum
Dies ist die Verallgemeinerung von Gl. (3.48) für dispersive und dissipative Medien.
Für σ > 0 erhält man eine räumlich gedämpfte Welle, die nachfolgend diskutiert
wird.
3.3.7 Räumlich gedämpfte ebene elektromagnetische Wellen in
Leitern
(i) Wir betrachten in einem leitenden Ausbreitungsmedium mit σ(ω) > 0 eine ebene
EM-Welle mit einem komplexen Wellenvektor
k = k(ω)
n;
n ∈ R3 , |n | = 1, k(ω)
∈C
(3.76)
wobei k(ω)
gemäß Gl. (3.75) bestimmt wird. Diese Größe zerlegen wir nach Realund Imaginärteil
k(ω)
= Re k(ω)
+j Im k(ω)
= β(ω) + jα(ω)
=: β(ω)
(3.77)
=: α(ω)
α heißt Dämpfungsmaß, β heißt Phasenmaß.
(ii) Bei der gewählten Kreisfrequenz ω ∈ R hat das elektromagnetische Feld die Form
ˆ j (kn · r −ωt)
(r , t) = Re { E
}
E
0e
(3.78)
ˆ
= Re { E0 e−α(ω)n · r ej(β(ω)n · r −ωt) }
(r , t) = Re { H
ˆ 0 e−α(ω)n · r ej(β(ω)n · r −ωt) }
H
ˆ 0 als unabhängige Amplitude gewählt wird mit
wobei H
k · H
ˆ 0 = 0 (vgl. (3.73))
und
ˆ
E
0 = −
1 ˆ 0 (vgl. (3.72))
k(ω)n × H
ω (ω)
(3.79)
3.3.7 Räumlich gedämpfte ebene elektromagnetische Wellen in Leitern
147
Führt man den komplexen Wellenwiderstand Z(ω)
analog zu Gl. (3.28) ein:
(
)
) μ(ω)
=
Z(ω) := *
(ω)
(
)
)
*
μ(ω)
(ω) + j σ(ω)
ω
(3.75)
=
k(ω)
ω (ω)
(3.80)
so erhält man aus (3.72) und (3.69) die komplexe Verallgemeinerung von (3.29)/(3.30):
ˆ
n× H
E
ˆ 0
0 = −Z (3.81)
ˆ
ˆ 0 = 1 n × E
H
0
Z
(3.82)
(iii) Räumliches Dämpfungsverhalten:
Die Felddarstellung (3.78)/(3.79) zeigt, dass die EM-Welle in der Ausbreitungsrichtung n räumlich exponentiell gedämpft wird. Ursache hierfür ist das Auftreten des
was nach der Dispersionsrelation (3.75) seine
Dämpfungsmaßes α(ω) = Im k(ω),
Ursache im Vorhandensein der elektrischen Leitfähigkeit σ > 0 hat. Die Dämpfung des elektromagnetischen Feldes findet auch in einem räumlich gedämpften
= E
×H
seinen Ausdruck; die der elektromagnetischen WelLeistungsfluss S
le entzogene Energie wird gemäß der Energiebilanzgleichung (1.30) als Joulesche
= σE
2 im Ausbreitungsmedium dissipiert.
Wärme j · E
Um das Abklingverhalten quantitativ als Funktion der Leitfähigkeit σ darzustellen,
wollen wir die Dämpfungskonstante α(ω) in der Näherung kleiner Frequenzen
ω · (ω) << σ(ω)
(3.83)
berechnen. Die dielektrische Relaxationszeit (vgl. Abschnitt 1.5.4.3) beträgt τR = ;
σ
daher bedeutet diese Näherung, dass die Schwingungsdauer T der Welle viel länger
als τR ist:
1
T
(3.84)
τR = << =
σ
ω
2π
Wegen (3.83) gilt mit (3.71):
σ(ω)
(ω) ≈ j
ω
Damit gilt gemäß der komplexen Dispersionsrelation (3.75):
2
k(ω)
= (ω)μ ω 2 ≈ jωσ(ω)μ = β 2 − α2 + 2jαβ
1
⇒ α = β und α2 = σ(ω)μ ω
2
(3.77)
148
3.3 Ebene Wellen im dreidimensionalen Raum
Damit erhalten wir als Dämpfungsmaß
!
α(ω) =
σ(ω)μ ω
2
(3.85)
1
1
ist das EM-Feld um den Faktor = 37% abgeklungen
α
e
(”Eindringtiefe“). Sie beträgt
Nach einer Länge Δz =
!
Δz(ω) =
2
σ(ω)μ ω
(3.86)
Das Phasenmaß läßt sich durch die Wellenlänge ausdrücken:
2π
= Re k = β = α
λ
Das Abklingverhältnis nach Durchlaufen einer Wellenlänge beträgt daher
e−λα = e−2π ≈ 2 · 10−3 .
Dieses ausgeprägte Abschirmverhalten von leitenden Medien gegen das Eindringen
elektromagnetischer Wellen wird als ”Skin-Effekt“ bezeichnet.