Kapitel 4 Energie
Werbung

116
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
Wenn die Energie eines Systems sich ändert, muss die Energie der Umgebung
sich um denselben Betrag, aber mit entgegengesetztem Vorzeichen, ändern, so
dass die Summe sich nicht ändert. Man spricht von Energieaustauch zwischen
dem System und seiner Umgebung.
Die Gesamtenergie ist die Summe von verschiedenen Teilen, die verschiedenen
Formen der Energie entsprechen. Zum Beispiel:
Kapitel 4
1. Die kinetische Energie hängt mit der Bewegung des Teilchens zusammen;
Energie
2. die potentielle Energie entspricht der Energie, die mit der räumlichen
Anordnung der Körper eines Systems zueinander zusammenhängt;
Im Prinzip kann man die Newtonschen Gesetze, die die Kraft und die Beschleunigung verbinden, verwenden, um ein beliebiges Bewegungsproblem, zu
lösen. Die Gesetze können allgemein und in verschiedenen Bereichen benutzt
werden, z.B. von der Bewegung eines Staubkorns bis zu der der Planeten oder
der Galaxien.
Die Fälle, in denen wir an der Bewegung von sehr vielen Körpern oder Teilchen
interessiert sind, sind praktisch sehr schwierig zu lösen.
3. die Wärmeenergie ist mit der Temperatur des Systems verknüpft;
4. die Strahlungsenergie ist die Energie, die durch Strahlen (z.B. Licht)
ausgesandt oder absorbiert wird;
5. die chemische Energie hängt mit dem chemischen Zustand zusammen;
6. die Masse ist auch eine Form von Energie;
7. usw. . .
Stellen wir uns z.B. die Schwierigkeit vor, den Stoss zweier Autos in allen
Einzelheiten zu beschreiben. Eine ähnliche Schwierigkeit treffen wir z.B. an bei
der Beschreibung einer Explosion. Auch eine numerische Lösung wäre in diesem
Fall schwierig, wegen der grossen Anzahl von Körpern, die man betrachten
muss, um eine detaillierte Lösung zu gewinnen.
Die Erhaltung der Gesamtenergie ist schwieriger auszudrücken, als die
des Impulses, weil die Energie in verschiedenen Formen vorkommen kann.
Um solch komplizierte Bewegungen zu beschreiben, können wir allgemeine Gesetze suchen, die aus Newtons Gesetzen folgen. Mit deren Hilfe können wir
etwas über die komplizierten Bewegungen aussagen.
Etot = EMasse + Ekin + Epot + Echem + usw.
= konst.
Im Fall der Explosion oder des Stosses der Autos kann man das Impulserhaltungsgesetz benutzen, um etwas über die Bewegung vorauszusagen.
In diesem Kapitel werden wir uns mit dem Begriff der Energie beschäftigen.
Dieser Begriff ist wichtig, weil es ein allgemeines Prinzip der Erhaltung der
Energie gibt. Wie für den Fall der Impulserhaltung, kann die Energieerhaltung
benutzt werden, um Vorgänge als Ganzes zu definieren.
4.1
Definition der Energie
Der Begriff der Energie ist nützlich wegen des Prinzips der Energieerhaltung.
Es besagt:
Bei allen Vorgängen muss die Gesamtenergie eines Systems und seiner Umgebung erhalten werden.
115
Man muss alle möglichen Formen betrachten, d.h.
(4.1)
Oft sagen wir, dass die Energie eines Teilchens nicht erhalten wird. Wenn z.B.
ein Körper durch Reibung gebremst wird, wird ein Energieaustauch mit der
Oberfläche stattfinden.
Die Gesamtenergie wird erhalten, aber wir können die Energie, die durch die
Reibung den Zustand der Oberfläche ändert, nicht ausdrücken, und wir werden
deshalb sagen, dass die Energie des Körpers, z.B. definiert als,
E = Ekin + Epot != konst. ,
(4.2)
nicht erhalten ist. In diesem Fall haben wir nur die kinetische und die potentielle
Energie betrachtet, und wenn es z.B. Reibung gibt, wird sie nicht erhalten.
Andererseits, wenn wir wissen, dass der Austauch nur zwischen bestimmten
Formen der Energie stattfindet, können wir die Teile der Gesamtenergie, die
konstant bleiben, ignorieren.
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
4.2
4.2.1
117
Die relativistischen Grössen
118
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
Demonstrationsexperiment: Messung der Ausbreitungsgeschwindigkeit des
Lichts durch den Hörsaal
Die Lichtgeschwindigkeit als Grenzgeschwindigkeit
Bei der Definition der Masse (Kap. 3.1) haben wir gesehen, dass in Rückstossversuchen das Verhältnis der Geschwindigkeiten der Wagen eine konstante
Zahl war, unabhängig von der Feder.
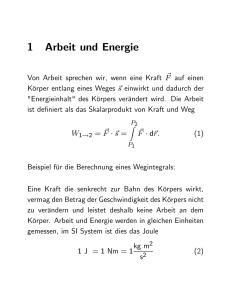
Ein Laser emittiert rotes Licht. Ein Lichtschalter erzeugt aus dem kontinuierlichen Laserstrahl eine Serie von Lichtimpulsen. Die Lichtimpulse breiten sich
durch den Hörsaal aus. Sie werden von einem Spiegel reflektiert und mit einem
Lichtempfänger wieder nachgewiesen. Die Zeit, die das Licht braucht, um den
Hörsaal zu durchqueren, wird gemessen. Siehe Abb. 4.1.
Wir haben dieses Ergebnis als
mA
vB
=
mB
vA
(4.3)
Lichtempfänger
ausgedrückt, wobei mA und mB die Massen der Wagen sind.
Wir fragen jetzt, was würde in einem solchen Rückstossexperiment geschehen,
wenn wir eine der Massen kleiner und kleiner machen?
Je kleiner die Masse ist, z.B. mB , desto schneller wird sie sich nach dem Rückstoss bewegen. Wenn mB gegen null geht, wird ihre Rückstossgeschwindigkeit
unendlich.
Eine ähnliche Situation beobachten wir, wenn eine Kraft auf einen Körper wirkt
und damit den Körper beschleunigt. Solange die Kraft wirkt, wird der Körper
beschleunigt und dadurch kann er eine beliebige Geschwindigkeit erreichen.
|F | = konst. ⇒ |a| = konst.
⇒ für t → ∞ ⇒ v → ∞
Laser
(4.4)
(4.5)
Lichtschalter
Im Bereich der klassischen Mechanik gibt es kein Problem mit diesen unendlichen Geschwindigkeiten.
Experimentell beobachten wir aber etwas anderes:
Ein Körper der Masse m kann sich nie mit einer Geschwindigkeit grösser als
die Lichtgeschwindigkeit bewegen.
Kein Körper kann eine Geschwindigkeit gleich der Lichtgeschwindigkeit erreichen, unabhängig davon wie stark und wie lange er beschleunigt wird.
Die Lichtgeschwindigkeit entspricht der höchsten Geschwindigkeit in der Natur.
Abbildung 4.1: Messung der Lichtgeschwindigkeit. Das Lichtsignal breitet sich
durch den Hörsaal nach links aus, und kommt wieder nach rechts zurück, nachdem es von einem Spiegel reflektiert wurde.
Gemessene Werte:
Die Lichtgeschwindigkeit wird als Konstante c bezeichnet.
• durch den Hörsaal zurückgelegte Strecke L ≈ 60 m
Die Lichtgeschwindigkeit wirkt als eine Grenzgeschwindigkeit, mit dem Wert
• gemessene Laufzeit: t ≈ 200 ns = 200 · 10−9 s
c = 299 792 458 m/s
(4.6)
Die Ausbreitungsgeschwindigkeit beträgt demnach:
oder ungefähr
8
c ≈ 3 · 10 m/s
(4.7)
⇒
L = ct
L
60 m
c= ≈
≈ 3 · 108 m/s
t
200 · 10−9 s
(4.8)
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
4.2.2
119
120
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
Der Geschwindigkeitsparameter
elektrische Spannung U
Da die Geschwindigkeit eines Körpers immer kleiner als die Lichtgeschwindigkeit sein muss, können wir sie relativ zur Lichtgeschwindigkeit definieren:
Geschwindigkeitsparameter ≡
v
c
(4.9)
wobei v die Geschwindigkeit des Körpers ist. Es gilt:
v<c
⇒
v
<1
c
e
(4.10)
Vorgang
Wagen mit 100 km/h
Schnellstes Flugzeug (Mach 6,72)
Erdbewegung um die Sonne
Elektron, beschleunigt durch 1000 V
Um die Erde in 1 Sekunde
Elektron, beschleunigt durch 1 000 000 V
Elektron, beschleunigt durch 1 000 000 000 V
Geschwindigkeitsparameter
v/c
0,000 000 093
0,000 006 8
0,000 099
0,063
0,13
0,94
0,999 999 88
Tabelle 4.1: Geschwindigkeitsparameter
dem Experimente mit Elementarteilchen durchführen, die die Existenz der
Grenzgeschwindigkeit beweisen. Man betrachtet Elektronen, die mit Hilfe von
grossen elektrischen Spannungen beschleunigt werden (die elektrische Wechselwirkung wird in den Kapiteln 6 und 10 weiter diskutiert).
Wir nehmen an, dass die Anfangsgeschwindigkeit des Elektrons sehr klein ist.
Das Elektron wird durch die elektrische Spannung, die ein elektrisches Feld
zwischen zwei Platten erzeugt, beschleunigt (siehe Abb. 4.2).
Die Endgeschwindigkeit des Elektrons wird gemessen, als Funktion der Spannung zwischen den Platten. Wenn wir die Anfangsgeschwindigkeit vernachlässigen, finden wir:
1. Spannung 1000 V = 1 · 103 V: Endgeschwindigkeit v/c ≈ 0,063
ve
beschleunigtes
Elektron
Die Lichtgeschwindigkeit ist sehr gross im Vergleich zu unseren Alltagserfahrungen.
Es ist schwierig, die Existenz einer solchen Grenzgeschwindigkeit mit makroskopischen Körpern zu beweisen. In Tabelle 4.1 werden die Geschwindigkeitsparameter von Körpern mit verschiedenen Geschwindigkeiten aufgelistet. Wir
bemerken, dass für die schnellsten makroskopischen Körper die Geschwindigkeit immer noch viel kleiner als die Lichtgeschwindigkeit ist. Man kann trotz-
e
−
+
Abbildung 4.2: Im elektrischen Feld beschleunigtes Elektron.
2. Spannung 1 · 106 V: Endgeschwindigkeit v/c ≈ 0,94
3. Spannung 1 · 109 V: Endgeschwindigkeit v/c ≈ 0,99999988
Wenn die Spannung erhöht wird, nimmt die Endgeschwindigkeit zu. Diese
nähert sich immer mehr der Lichtgeschwindigkeit, kann aber die Grenze nie
überschreiten. Damit hat man direkt bewiesen, dass die Lichtgeschwindigkeit
als Grenzgeschwindigkeit wirkt.
Dieses Ergebnis kann auch mit Hilfe der Kräfte ausgedrückt werden. Eine Kraft
kann auf einen Körper wirken und damit den Körper beschleunigen. Solange
die Kraft wirkt, wird der Körper beschleunigt und seine Geschwindigkeit wird
zunehmen. Trotzdem kann er nicht eine beliebige Geschwindigkeit erreichen.
Der Körper wird sich der Lichtgeschwindigkeit nähern, ohne sie zu erreichen.
Was ist dann die Beziehung zwischen Kraft und Beschleunigung bei hoher Geschwindigkeit? Wir werden das im nächsten Abschnitt diskutieren.
In der Praxis kann man oft vergessen, dass es in der Natur eine höchste Geschwindigkeit gibt, aber dies hat unsere theoretischen Konzepte verändert. Wir
diskutieren nun die Folgerung für den Impuls.
4.2.3
Der relativistische Impuls
Wir müssen nun eine wichtige Folgerung aus der Existenz der Grenzgeschwindigkeit diskutieren und betrachten dazu Gl. 3.4:
vB
mA
=
mB
vA
⇒
mA vA = mB vB
⇒
pA = pB
(3.4)
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
121
122
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
Für hohe Geschwindigkeiten wird das Verhältnis, das wir im Rückstossexperiment gefunden haben, nicht mehr gelten:
mA
vB
!=
mB
vA
für hohe Geschwindigkeiten ?
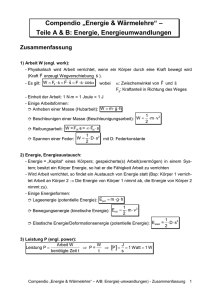
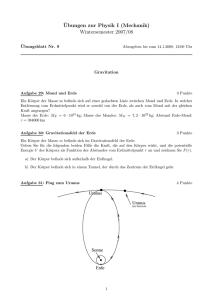
p
p = γmv
Das Verhältnis gilt nur, wenn die Geschwindigkeiten der Körper relativ zur
Lichtgeschwindigkeit klein sind. Wir drücken dieses Ergebnis aus als:
mA
vB
=
mB
vA
gilt nur wenn vA /c ( 1 und vB /c ( 1
Wir haben von der Gl. 3.4 gesprochen, als wir das Impulserhaltungsgesetz
eingeführt haben. Müssen wir aus der Beobachtung, dass die Gleichung nicht
mehr gilt, wenn die Geschwindigkeiten der Körper sehr hoch sind, schliessen,
dass das Impulserhaltungsgesetz auch nicht mehr gilt, wenn die Impulse der
Körper sehr gross sind?
pklassisch = mv
Wir retten das Impulserhaltungsgesetz mit einer neuen (erweiterten) Definition
des relativistischen Impulses eines Körpers:
p = γmv
(4.11)
0
0,5
1 v/c
mit dem Lorentzfaktor1 γ:
γ≡!
Abbildung 4.3: Abhängigkeit des klassischen und des relativistischen Impulses
von der Geschwindigkeit v/c.
1
1−
v2
c2
(4.12)
Erstmals hat Einstein2 am Anfang des 20. Jahrhunderts diese erweiterte Definition des Impulses hergeleitet.
Die Abhängigkeit des klassischen und des relativistischen Impulses von der Geschwindigkeit ist in Abb. 4.3 dargestellt. Man sieht, dass für kleine Geschwindigkeiten der Lorentzfaktor nahezu gleich eins ist. Dann gilt die klassische“
”
Definition des Impulses. D.h., der klassische Impuls ist eine Näherung des Impulses eines Körpers, die gilt, wenn die Geschwindigkeit des Körpers viel kleiner
als die Lichtgeschwindigkeit ist. Solange die Geschwindigkeit des Körpers klein
ist relativ zur Lichtgeschwindigkeit, wird der Lorentzfaktor γ ≈ 1 und dann
liefert die klassische Definition des Impulses den richtigen Wert mit grosser
Genauigkeit (Siehe Tabelle 4.2).
Wir bemerken, dass, wenn der Körper sich bewegt, der Lorentzfaktor immer
grösser als eins ist. Er geht nach unendlich wenn die Geschwindigkeit sich der
Lichtgeschwindigkeit nähert (siehe Abb. 4.3 und Tabelle 4.2). Da der Impuls
1
2
Hendrik Antoon Lorentz (1853-1928)
Albert Einstein (1879-1955)
als Produkt der Masse und der Geschwindigkeit definiert wurde, können wir
die relativistische Definition des Impulses so ausdrücken:
p = (γm) v
(4.13)
wobei das Produkt γm als relativistische“ Masse bezeichnet werden kann.
”
Vom Standpunkt des Impulses sieht es so aus, als ob die Masse des Körpers
mit der Geschwindigkeit zunimmt. Weil diese (träge) Masse der Änderung des
Bewegungszustands entgegen wirkt (Trägheitsprinzip!), folgt aus der Zunahme der relativistischen Masse mit der Geschwindigkeit, dass, je schneller sich
der Körper bewegt, desto schwieriger es ist, ihn zu beschleunigen! Wenn sich
die Geschwindigkeit des Körpers der Lichtgeschwindigkeit nähert, geht seine
relativistische Masse nach unendlich und im Grenzfall ist es nicht möglich, den
Körper weiter zu beschleunigen. Der Körper kann daher die Lichtgeschwindigkeit nie erreichen.
Der Gesamtimpuls eines Systems wird als die Summe der relativistischen Impulse definiert. In diesem Fall gilt das relativistische Impulserhaltungsgesetz
(Siehe Kap. 3.3.1):
In einem isolierten System ist der gesamte relativistische Impuls erhalten.
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
v
0
1000 km/h
c/10
c/2
0,994 c
c
$
123
Lorentzfaktor γ = √
1 − v 2 /c2
1
1 − 4 · 10−13
0,995
0,87
1/9
0
124
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
1
1−v 2 /c2
1
1 + 4 · 10−13
1,005
1,15
9
∞
Tabelle 4.2: Der Lorentzfaktor für verschiedene Geschwindigkeiten.
4.3
Die Masse-Energie-Äquivalenz
Auf die Erde kommt von der Sonne eine grosse Menge von nützlicher Energie, meistens in Form von Strahlungsenergie (Licht). Die Sonne stösst eine
enorme Menge von Strahlungsenergie aus.
Die SI-Einheit der Energie ist das Joule (J)
1 J = 1 kg
m2
=1
s2
%
kg m
s2
&
· m = 1N · m
(4.14)
Die Leistung P entspricht der Energie pro Zeit (P = dE/dt). Eine 100 WattGlühbirne braucht 100 Joule pro Sekunde (J/s) oder 100 Watt (W). Die Strahlungsleistung der Sonne beträgt:
P ≈ 4 · 1026 W
(4.15)
Wenn die Sonne (Siehe Abb. 4.4) wie eine Kugel aus Kohle brennen würde,
würde sie nur ungefähr 5000 Jahre lang leben. Wir wissen jedoch, dass die
Sonne mit derselben Rate während ungefähr 5 Milliarden Jahren gebrannt
hat, und sie soll noch während 5 Milliarden Jahren brennen.
Einstein hat 1905 erklärt, wie die Sonne eine solche Menge von Strahlungsenergie ausstossen kann, mit seiner berühmten Beziehung zwischen Masse und
Energie:
wobei E die Energie, m die Masse und c die Lichtgeschwindigkeit ist.
Diese Gleichung drückt aus, dass Masse eine Form von Energie ist.
Wenn wir eine Masse von 1 Kilogramm ganz in Energie umwandeln könnten,
folgt aus der Masse-Energie Beziehung, dass die gewonnene Energie
"
#2
E = mc2 ≈ (1 kg) 3 · 108 m/s = 9 · 1016 J
(4.17)
wäre. Masse enthält eine enorme Menge von Energie! Wenn 1 kg ganz in Energie
umgewandelt werden könnte, könnte damit eine Stadt wie Zürich für ungefähr
50 Jahre beleuchtet werden.
4.4
Die Masse-Energie Äquivalenzgleichung lautet:
E = mc2
Abbildung 4.4: Die Sonne. Wir wissen, dass die Sonne mit derselben Rate
während ungefähr 5 Milliarden Jahren gebrannt hat.
(4.16)
Die kinetische Energie
Wir haben schon erwähnt, dass Bewegung einer Form von Energie entspricht.
Wenn sich ein Körper relativ zu einem anderen bewegt, erhält er zusätzliche
Energie.
Die Energie, die der Körper gewinnt, wenn er sich bewegt, ist seine kinetische
Energie.
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
125
Wenn ein Körper der Masse m sich bewegt, besitzt er daher eine Ruheenergie
mc2 und eine zusätzliche kinetische Energie Ekin , und seine Gesamtenergie
ist daher:
E = mc2 + Ekin
(4.18)
Wie soll die Gesamtenergie berechnet werden? Im Fall des relativistischen Impulses haben wir gesehen, dass die erweiterte Definition mit dem Ersetzen
der Masse m durch die relativistische Masse γm gefunden werden konnte.
Tatsächlich, wenn wir die Masse-Energie Äquivalenzgleichung E = mc2 für die
relativistische Masse γm anwenden, finden wir die Gesamtenergie des Körpers3 !
Es gilt:
126
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
γ = (1 − v 2 /c2 )−1/2
1,000 050 03
1,005 037
1,020 6
1,048
1,148
1,41
2,30
7,1
v/c
0,01
0,1
0,2
0,3
0,5
0,7
0,9
0,99
1 + v 2 / (2c2 )
1,000 050 00
1,005 000
1,020 0
1,045
1,125
1,25
1,40
1,49
Tabelle 4.3: Numerischer Vergleich zwischen genauer und genäherter Gleichung
Ein Körper der Masse m mit der Geschwindigkeit v hat die Gesamtenergie
E = γmc2 = !
In diesem Fall ist die Gesamtenergie des Teilchens gleich
mc2
(4.19)
v2
c2
1−
= mc2
Mit der in Gl. 4.18 aufgeführten Beziehung kann die kinetische Energie des
Körpers bestimmt werden:
Ekin = E − mc2 = mc2 (γ − 1)
(4.20)
Für Körper, die sich langsam bewegen, benutzen wir die Näherung
(1 − α)β ≈ 1 − βα
E = γmc2
'
(α ( 1)
(4.21)
$
genaue Gleichung
1 − v 2 /c2
&
1 v2
≈ mc2 1 + 2
genäherte Gleichung
2c
1
= mc2 + mv 2
2
%
!
v2
1− 2 =
c
1
2
v
1− 2
c
=
%
%
v2
1− 2
c
1−
v2
c2
&1/2
1 v2
≈1− 2
2c
&−1/2
≈1+
1 v2
2 c2
Wir haben die Gleichung E = mc2 als Summe von zwei Teilen geschrieben; der
Teil der Ruheenergie mc2 und der kinetische Teil Ekin = mv 2 /2:
E=
(4.22)
(4.23)
Die Näherung kann für Geschwindigkeiten v ! 0,1c benutzt werden. Siehe
Tabelle 4.3.
3
Dieses Resultat war zu erwarten. Masse-Energie-Äquivalenz heisst, dass jede Form von
Energie, auch die kinetische Energie, die ein Körper hat, als seine (relativistische) Masse
ausgedrückt werden kann. Wenn die Energie des Körpers zunimmt, wird seine scheinbare
Masse auch erhöht. Dieses Ergebnis ist auch in Übereinstimmung mit der relativistischen
Definition des Impulses. Um diese Tatsache noch weiter zu illustrieren: wir wissen heute, dass
der grösste Teil der Masse der Protonen und Neutronen aus der Bindungsenergie zwischen
ihren Bestandteilen (die sogenannten Quarks) kommt. D.h., der meiste Teil der Masse, die
wir im Universum beobachten, kommt nicht aus der Ruheenergie ihrer Bestandteile, sondern
aus der Energie der Wechselwirkung, die die Bestandteile zusammenhält.
(4.24)
Die letzte Gleichung gilt für Körper, die sich mit einer Geschwindigkeit kleiner
als ≈ 0,1c bewegen.
woraus folgt
!
(
1
1
+ mv 2
2
) *+ ,
Ruheenergie
mc2
)*+,
(4.25)
kinetisch
Solange die Geschwindigkeit eines Teilchens weniger als 0,1c ist, ist seine kinetische Energie viel kleiner als seine Ruheenergie.
Beispiel 1: Die Gewehrkugel
Wir betrachten eine Gewehrkugel der Masse 10 g, die sich mit einer Geschwindigkeit von 300 Meter pro Sekunde bewegt. Bestimme ihre kinetische und Ruheenergie.
Kinetische Energie:
1
Ekin = mv 2
2
1
= (0,01 kg) (300 m/s)2
2
= 450 J
(4.26)
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
127
128
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
Die Energie ist hoch genug, so dass die Kugel eine Planke durchdringt.
E = γmc2 ;
Ruheenergie:
und daher
E0 = mc2
"
8
= (0,01 kg) 3 · 10 m/s
= 9 · 1014 J
#2
(4.27)
Diese Energie ist gleich der freigesetzten Energie einer mittelgrossen Atombombe. Eine Tonne TNT entspricht
9
4.184 · 10 J = 4,184 GJ
(4.28)
wobei G = Giga = 109 . Die Atombomben, die im 2. Weltkrieg verwendet wurden, entsprachen 15 Kilotonnen TNT, d.h.
15 000 Tonnen TNT ≡ 60 · 1012 J = 60 TJ
(4.29)
E 2 − p2 c2 = m2 c4
Die heutigen modernen“ Atombomben setzen bis 84 000 TJ frei (eine solche
”
Bombe wurde 1954 während eines Tests in den USA gezündet).
Beispiel 2: Brennen der Sonne
P ≈ 4 · 1026 J/s
ist. Wenn wir annehmen, dass diese Energie aus der Umwandlung von Masse
in Energie kommt, dann ist die Brennrate der Masse der Sonne gleich:
⇒
m=
E
c2
(4.31)
Numerisch,
dm
1 dE
4 · 1026 J/s
= 2
≈
dt
c dt
9 · 1016 m2 /s2
= 4, 4 · 109 kg/s
4.5
(4.36)
Diese Beziehung gilt für alle Körper, auch für masselose. Mit m = 0 folgt
E = |p|c
(4.38)
In diesem Fall ist die Geschwindigkeit des Körpers begrenzt; er bewegt sich
immer mit der Lichtgeschwindigkeit:
%
&
γmv 2
|p| 2
γmc2
v=
c =
|v| =
c =c
(4.39)
γmc2
γmc2
E
Diese Beziehung gilt z.B. für das elementare Teilchen, das als Photon bezeichnet
wird. Wir werden im Kap. 11 sehen, dass das Licht aus (masselosen) Photonen
besteht.
Wir haben schon erwähnt, dass die Strahlungsleistung der Sonne gleich
E = mc2
(4.35)
Danach lässt sich durch die Messung der Energie und des Impulses eines
Körpers seine Masse bestimmen:
$
mc2 = E 2 − p2 c2
(4.37)
wobei T = Tera = 10 . Im Vergleich dazu ist die Energie, die in der Masse
der Kugel von 10 g enthalten ist, gleich
(4.30)
%
&
"
#2
v2
E 2 − p2 c2 = γmc2 − (γmv)2 c2 = γ 2 m2 c4 1 − 2
c
= m2 c4
(4.34)
Schliesslich:
12
E0 = mc2 = 900 TJ
p = γmv
(4.32)
(4.33)
Die relativistische Beziehung zwischen
Energie und Impuls
Zwischen der Gesamtenergie und dem Impuls eines Körpers besteht ein grundlegender Zusammenhang. Es gilt:
4.6
Potentielle Energie der Gravitation
Wir fahren weiter mit unserer Untersuchung der Teile der Gesamtenergie. Wir
wollen nun das Konzept der potentiellen Energie einführen. Als einfachstes
Beispiel wählen wir zuerst die Gravitationskraft.
Demonstrationsexperiment: Wassersack
Ein Wassersack der Masse m wird vom Boden auf die Höhe h hochgezogen
(Phase I) und anschliessend frei fallen gelassen (Phase II). Nach dem Fall wird
der Wassersack auf den Boden aufprallen (Phase III). Was passiert hier energetisch? Siehe Abb. 4.5.
1. Phase I: ein Mensch leistet “Arbeit”, um den Wassersack hochzuziehen.
Die Arbeit nimmt mit der Höhe zu. Schliesslich, wenn der Wassersack eine Höhe h erreicht, wird die gesamte Arbeit im Wassersack gespeichert.
Diese wird als die potentielle Energie des Wassersackes bezeichnet.
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
129
130
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
Punkt (1)
m
Ruhe
v1 = 0
Ekin = 0
h
m Ekin = 12 mv22
Punkt (2)
v2
Abbildung 4.6: Freier Fall eines Wassersackes. Wenn der Sack frei fällt, wird
seine kinetische Energie zunehmen.
Abbildung 4.5: Freier Fall eines Wassersackes. Was passiert energetisch?
dass der Körper nicht relativistisch ist, dann ist diese Energie gleich
2. Phase II: Diese Phase ist der freie Fall des Wassersacks wegen der Gravitationskraft der Erde. Die potentielle Energie wird sukzessive umgewandelt
in kinetische Energie.
1
Ekin = mv22
2
3. Phase III: Der Wassersack landet auf dem Boden. Die gesamte Masse
(Wassersack und Wasser) befinden sich nun in Ruhe. Wo ist die gesamte
Energie geblieben?
Wegen der Erhaltung der Energie muss die gesamte Energie des Körpers erhalten werden. Deshalb suchen wir die zusätzliche Form der Energie, d.h. potentielle Energie, die im Körper gespeichert wird, wenn er auf eine Höhe h gehoben
wird:
(a) Der Knall beim Aufprall des Wassersackes am Boden zeigt, dass ein
Teil der Energie in Schallenergie umgewandelt wurde.
(b) Der andere Teil wurde in andere Formen umgewandelt, wie z.B.
Wärmeenergie, Bodendeformationsenergie, usw...
Die Summe der verschiedenen Formen von Energie wurde erhalten.
(4.40)
Die potentielle Energie hängt von der Position (d.h., der Höhe relativ zum
Boden) des Körpers ab. Wir haben sie relativ zum Boden definiert (Wahl des
Nullpunkts der potentiellen Energie).
Diese Energie wird sich während des Falls des Körpers in kinetische
Energie umwandeln.
Wir betrachten nun den Fall des Wassersackes quantitativ. Hier werden wir
annehmen, dass der Wassersack sich in der Nähe der Erdoberfläche befindet
und der Luftwiderstand vernachlässigt werden kann.
Wenn der Luftwiderstand vernachlässigt wird, kann die gesamte Energie
als die Summe der kinetischen und potentiellen Energie des Körpers betrachtet
werden. Sie wird während des Falls erhalten.
Wir analysieren die folgende Situation: ein Körper der Masse m (=ein Wassersack) wird von einer Höhe h aus frei fallen gelassen. Bevor er losgelassen wird,
befindet er sich im Punkt (1) und in Ruhe (v1 = 0). Deshalb besitzt er keine
kinetische Energie. Siehe Abb. 4.6.
Mit den Gleichungen der gleichförmig beschleunigten Bewegung finden wir eine
Beziehung zwischen der Höhe und der Geschwindigkeit v2 . Wir betrachten die
vertikale (ein-dimensionale) Bewegung des Sackes. Der Körper befand sich in
Ruhe, als er zur Zeit t = 0 losgelassen wurde. Er erreicht den Boden zur Zeit
t. Es gilt:
1
v2 = gt und h = gt2
(4.41)
2
Im Punkt (2), bevor er auf dem Boden landet, bewegt sich der Körper mit der
Geschwindigkeit v2 und besitzt eine kinetische Energie. Wenn wir annehmen,
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
131
Die Erdbeschleunigung ist gleich der Konstante g. Damit gilt:
1
h= g
2
%
v2
g
&2
=
v22
2g
und
1 2
v = gh
2 2
(4.42)
Wenn wir diese Gleichung mit der Masse m des Körpers multiplizieren, erhalten
wir:
1 2
mv = mgh
(4.43)
2 2
Diese Gleichung entspricht dem Energieaustausch zwischen kinetischer und potentieller Energie.
Damit folgt die Definition:
Die potentielle Energie eines Körpers, der sich auf einer Höhe h befindet, ist
gleich (Nullpunkt der potentiellen Energie bei h = 0)
Epot (h) = mgh
(4.44)
Wir berechnen nun die Gesamtenergie des Körpers im Punkt (1). Dort besitzt
er keine kinetische Energie und eine potentielle Energie, die von der Höhe h
relativ zum Boden abhängt:
132
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
Aus der Energieerhaltung folgt, dass E(y) = E1 = E2 . Damit kann die Geschwindigkeit v des Körpers in einem beliebigen Punkt der Höhe y berechnet
werden.
Weil die Masse des Körpers sich nicht ändert während des Falls, kann die
Ruheenergie weggelassen werden. Die Gleichung der Energie-Erhaltung sieht
dann so aus:
1
E1 = mgh = E2 = mv22
2
ohne Ruheenergie
(4.49)
Welche ist die “korrekte” gesamte Energie des Körpers? Gl. 4.47 oder 4.49 ?
Weil der Term mc2 sehr gross ist, muss die gesamte Energie sehr verschieden
sein, je nachdem, ob wir die Ruheenergie in der gesamten Energie berücksichtigen oder nicht. Die Antwort ist, dass beide Ansätze für die Gesamtenergie
korrekt sind, solange wir kohärente Definitionen verwenden. Wir betonen: wenn
wir die Energie betrachten, sind wir nur an der Umwandlung der Energie von
einer Form in eine andere interessiert.
In ähnlicher Weise ist der absolute Wert der potentiellen Energie nicht von Bedeutung. Man könnte ebenso den Nullpunkt der potentiellen Energie in einem
anderen Punkt wählen. Beim freien Fall sind nur die Änderung der potentiellen
Energie und ihre Umwandlung in kinetische Energie wichtig.
Schliesslich:
Punkt (1): E1 = mc2 + mgh
(4.45)
Der absolute Wert der Gesamtenergie ist nicht wichtig.
Wir haben auch die Ruheenergie mc2 des Körpers eingefügt. Im Prinzip wäre
das nicht nötig, wenn wir sicher sind, dass diese Form von Energie sich nicht
in eine andere umwandeln wird.
Die Erhaltung der Energie sagt nur voraus, dass bei einer Änderung der einen
Form der Energie sich eine andere Form der Energie um denselben Betrag,
aber mit entgegengesetztem Vorzeichen ändert, so dass die Summe der beiden
Energieformen konstant bleibt.
Im Punkt (2) besitzt der Körper eine kinetische Energie und keine potentielle
Energie mehr. Die gesamte Energie ist gleich:
Man spricht von Energieaustauch zwischen verschiedenen Formen der Energie.
Punkt (2): E2 = mc2 + 21 mv22
(4.46)
Aus der Energieerhaltung in Abwesenheit von Luftwiderstand folgt, dass E1 =
E2 = konst., d.h.
1
E1 = mc2 + mgh = E2 = mc2 + mv22
2
(4.47)
Die Gesamtenergie E des Körpers in einem beliebigen Punkt der Höhe y (0 ≤
y ≤ h) ist dann gleich
E(y) =
1
+ mv 2 + mgy
)*+,
2
) *+ , potentiell
Ruheenergie
mc2
)*+,
kinetisch
(4.48)
4.7
4.7.1
Anwendung: Energieerhaltung
Bewegung eines Balles in einer Kreisschleife
Wir betrachten einen Ball, der sich in der in Abb. 4.7 gezeigten Schleife bewegen
kann. Was ist die Mindesthöhe, von welcher der Ball starten muss, um die
Schleife erfolgreich zu beenden?
Wir nehmen an, dass der Ball, ohne zu rollen und ohne Reibung gleitet, und
dass seine Ausdehnung vernachlässigbar klein ist. Der Ball gewinnt an Geschwindigkeit, während er sich abwärts bewegt, und verliert Geschwindigkeit,
wenn er sich aufwärts bewegt.
In jedem Punkt der Bahn wirken zwei Kräfte auf den Ball (siehe Abb. 4.8):
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
133
134
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
1. Die Gravitationskraft mg, die stets nach unten zeigt.
2. Die von der Bahn ausgeübte Normalkraft N , deren Richtung von der Position des Balls abhängt. Die Normalkraft ist in Abb. 4.8 für verschiedene
Punkte der Bahnkurve gezeigt.
z
A
v=0
h
vB
2R
Die Kreisbewegungsgleichung (Siehe Kap. 2.7.1) besagt, dass die Beschleunigung eines Körpers, der sich mit der Geschwindigkeit v auf einem Kreis bewegt,
die folgende sein muss:
v2
a=
(4.50)
R
wobei R der Radius der Kreisschleife ist. Wenn der Ball einen Kreis mit Radius
R beschreiben soll, muss die resultierende Kraft, die auf ihn wirkt, einen Betrag
gleich F = ma haben, und sie muss nach dem Zentrum des Kreises gerichtet
werden.
B
R
Wir bemerken:
x
Abbildung 4.7: Bewegung in einer Schleife von Punkt A zum Punkt B.
Am höchsten Punkt der Schleife zeigen die Gravitationskraft und die Normalkraft in dieselbe Richtung und nach unten“, und nach dem Zentrum des Krei”
ses.
Damit ist die resultierende Kraft, die auf den Ball am höchsten Punkt der
Schleife wirkt, gleich
F = N + mg = ma = m
z
2R
v=0
B
N
mg
mg
N
N = 0 und m
N
N
mg
⇒
N =m
v2
− mg ≥ 0
R
(4.51)
Diese Gleichung zeigt, wie erwartet, dass, je schneller sich der Ball um den Kreis
bewegt, desto grösser ist die Normalkraft N . Im Gegensatz dazu: je langsamer
sich der Ball bewegt, desto kleiner ist die Normalkraft. Wenn die Geschwindigkeit v geringer als die minimale Geschwindigkeit vmin ist, wird sich der Ball
vom Kreis lösen. Die Normalkraft hat keine physikalische Bedeutung mehr und
die Gravitationskraft allein bestimmt die Bewegung des Balls. Die minimale
Geschwindigkeit vmin des Balles entspricht daher dem Grenzfall:
A
h
v2
R
mg
Damit erhalten wir:
vmin =
x
Abbildung 4.8: Bei der Bewegung in einer Schleife auftretende Kräfte.
2
vmin
= mg
R
$
gR,
(4.52)
(4.53)
unabhängig von der Masse m. Diese Tatsache kann so erklärt werden: die Bedingung für eine Kreisbewegung (Siehe Gl. 4.50) bestimmt die Beschleunigung.
Die entsprechende Kraft ist zur (trägen) Masse m proportional. Je grösser die
Masse ist, desto grösser ist die Kraft, die benötigt wird, eine solche Beschleunigung zu bewirken. Die Gravitationskraft ist aber auch zur (schweren) Masse
proportional, so dass vmin unabhängig von der Masse m ist.
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
135
Um die entsprechende Höhe h zu berechnen, bestimmen wir die gesamte Energie in den Punkten A und B der Figur 4.7:
136
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
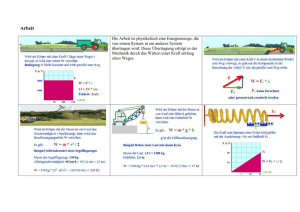
Die Arbeit ist deshalb eine skalare Grösse. Ihre Einheit ist das Joule (J), weil
1 N · m = 1(
1
Punkt A: EA = mvA2 + mgh = 0 + mgh
(4.54)
2
.
$
2
1
5
1
gR + mg (2R) = mgR + 2mgR = mgR
Punkt B: EB = m
2
2
2
(4.55)
Wenn wir die Energieerhaltung anwenden, erhalten wir:
5
h= R
2
m2
kg · m
) · m = 1 kg 2 = 1J
2
s
s
(4.60)
Die Arbeit besitzt deshalb dieselbe Einheit wie die Energie.
Die Arbeit, die eine Kraft leistet, kann entweder positiv oder negativ sein. Sie
kann auch verschwinden. Siehe Abb. 4.9:
Die Arbeit nimmt einen positiven Wert an, wenn die Kraft und die Verschiebung in dieselbe Richtung zeigen, und einen negativen Wert, wenn sie entgegengesetzte Richtungen haben.
(4.56)
m
Die Höhe ist, wie die minimale Geschwindigkeit vmin , von der Masse m unabhängig.
m
mg
∆x
mg
m
4.8
Die Arbeit, die eine Kraft leistet
∆x
v
∆x
mg
4.8.1
Bewegung in einer Dimension
Im Beispiel des frei fallenden Wassersackes haben wir bewiesen, dass die potentielle Energie der Gravitation bezüglich dem Boden gleich Epot (h) = mgh
ist, wobei m die Masse des Wassersackes ist, und h die Höhe.
Der Wassersack fällt wegen der Gravitationskraft, die einen Betrag mg besitzt.
Wir bemerken, dass der Betrag der Abnahme der potentiellen Energie gleich
dem Produkt der Gravitationskraft mal der Verschiebung ist:
(mg) · h = (Gravitationskraft) × (Verschiebung)
m
m
W >0
W =0
Abbildung 4.9: Die Arbeit W , die die Gravitationskraft an einem Körper leistet.
(4.57)
4.8.2
Wir definieren:
Die Arbeit, die eine Kraft an einem Körper leistet, ist gleich dem Produkt der
Komponente der Kraft längs der Verschiebung und der Verschiebung, d.h. das
Skalarprodukt der Vektoren
W = F · ∆r ,
(4.58)
Bewegung in mehreren Dimensionen
Wir betrachten eine Bewegung in mehreren Dimensionen. Ein Körper bewegt
sich entlang einer Bahn im Raum. Siehe Abb. 4.10. Eine Kraft, die auf ihn
wirkt, kann als eine Funktion des Ortsvektors geschrieben werden, die den
Kraftvektor F am Punkt r darstellt:
wobei ∆r der Verschiebungsvektor ist.
F = F (r)
Die Arbeit kann auch so definiert werden:
W = |F ||∆r| cos ϑ
W <0
(4.59)
wobei ϑ der Winkel zwischen dem Kraftvektor und dem Verschiebungsvektor
ist.
(4.61)
Wir bemerken:
Die Arbeit, die die Kraft am Körper leistet, wird berechnet entlang der Bahn
zwischen zwei Punkten r 1 und r 2 . Im Allgemeinen hängt die Arbeit von der
Bahn ab.
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
137
Fb
dr b
r1
Fa
dr e
dr 1
r2
Fe
Fd
x
Abbildung 4.10: Ein Teilchen bewegt sich entlang einer Bahn in zwei Dimensionen, die zwei Punkte 1 und 2 verbindet. Die Kraft wird als eine Funktion
des Ortsvektors definiert. Die Arbeit wird berechnet entlang der Bahn.
Die Bahn zwischen den zwei Punkten r 1 und r 2 wird in differentielle Strecken
dr unterteilt, entlang denen die Kraft als konstant betrachtet werden kann.
Die geleistete Arbeit dW entlang dieser differentiellen Strecke ist gleich
dW = F (r) · dr
/r2
r1
4.8.3
dW =
/r2
r1
Um dieses Resultat zu beweisen, betrachten wir einen bestimmten Weg zwischen den Punkten P1 und P2 (siehe Abb. 4.11) und beschränken uns auf zwei
Dimensionen (das Resultat gilt für eine beliebige Anzahl von Koordinaten):
y
P2
y2 − y1
r2
P1
x2 − x1
r1
A
x
F (r) · dr
(4.63)
r1
Abbildung 4.11: Zur Berechnung des Linienintegrals zwischen zwei Punkten r 1
und r 2 .
Arbeit der Gewichtskraft
Wir berechnen die Arbeit der Gewichtskraft mit Hilfe des Linienintegrals. Die
Kraft ist konstant:
F (r) = mg = −(mg)ey
r1
Wir bemerken nun, dass das Linienintegral der differentiellen Strecke der gesamten Verschiebung zwischen r 1 und r 2 entspricht:
/r2
dr = r 2 − r 1
(4.67)
(4.62)
Die gesamte zwischen den Punkten r 1 und r 2 geleistete Arbeit W12 wird berechnet als das Linienintegral von F entlang der Bahn zwischen den Punkten r 1
und r 2 :
W12 =
r1
r1
dr d
r1
r1
Ein Integral kann als eine Summe betrachtet werden. Da g konstant ist und
wegen des Distributivgesetzes des Skalarprodukts (Siehe Kap. 1.5.2) können
das Skalarprodukt und das Integral vertauscht werden:
/r2
/r2
m g · dr = mg · dr
(4.66)
Fc
dr c
F1
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
d.h., die y-Achse zeigt in die vertikale Richtung und nach oben. Die von der
Gewichtskraft geleistete Arbeit ist gleich
/r2
/r2
/r2
W12 = F (r) · dr = mg · dr = m g · dr
(4.65)
y
dr a
138
wobei r = xex + yey
und g > 0
(4.64)
In der x, y-Ebene integrieren wir zuerst zwischen P1 und A und nachher zwischen A und P1 , d.h.
/r2
/A
/P2
/P2
dr = dr = dr + dr
(4.68)
r1
P1
P1
A
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
139
Entlang der ersten Strecke zwischen P1 und A hat die differentielle Strecke nur
eine x-Komponente. Wir schreiben:
dr = (dx, 0)
zwischen P1 und A
(4.69)
dr = (0, dy)
zwischen A und P2
(4.70)
4.8.4
Das erste Integral zwischen P1 und A entspricht damit der gesamten Verschiebung in der x-Richtung mit dem Betrag |x2 − x1 |. Der resultierende Vektor
ist daher (x2 − x1 ) ex . Das zweite Integral zwischen A und P1 entspricht der
gesamten Verschiebung in der y-Richtung mit dem Betrag |y2 − y1 |. Der resultierende Vektor ist daher (y2 − y1 ) ey . Die Summe entspricht der gesamten
Verschiebung zwischen P1 und P2 :
/2
1
/A
/2
r1
Arbeit der Federkraft
Wir betrachten die von der Federkraft geleistete Arbeit. Es gilt für kleine Verschiebungen (Hookesches Gesetz, Siehe Kap. 3.8.4):
F = −k (x − x0 )
(4.79)
wobei k die Federkonstante ist. Wenn der Ursprung der x-Achse die Gleichgewichtslage der Feder ist, erhalten wir:
dr
(4.71)
F (x) = −kx
= (x2 − x1 ) ex + (y2 − y1 ) ey
= r2 − r1
(4.72)
(4.73)
d.h., für x > 0 ist die Feder gedehnt, und für x < 0 ist sie zusammengedrückt. Die Bewegung ist hier eindimensional. Die geleistete Arbeit zwischen
den Verschiebungen x1 und x2 ist gleich
dr =
dr +
1
A
Diese Herleitung gilt für eine beliebige Strecke, weil wir eine Strecke immer in
eine Anzahl von nur horizontalen und nur vertikalen Verschiebungen unterteilen
können. Das Linienintegral ist dann gleich der resultierenden Verschiebung
zwischen den Endpunkten. Damit gilt:
/r2
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
Wenn der Ball vom Boden auf die Höhe h hochgezogen wird (d.h. y2 = h,
y1 = 0), hat die geleistete Arbeit einen negativen Wert, weil in diesem Fall
die Gewichtskraft entgegengesetzt der Bewegung ist (d.h. man muss ziehen, um
den Ball hochzuheben.)
In ähnlicher Weise:
W12 =
140
F (r) · dr = mg ·
/r2
dr = mg · (r 2 − r 1 )
(4.74)
r1
= (−mg ey ) · {(x2 − x1 ) ex + (y2 − y1 ) ey }
(4.75)
= {−mg (x2 − x1 ) ey · ex } + {−mg (y2 − y1 ) ey · ey }
(4.76)
W12 = −mg (y2 − y1 )
(4.77)
oder
Das Ergebnis hängt nur vom Unterschied y2 −y1 zwischen den Höhen der beiden
Endpunkte ab. Beachte das Vorzeichen! Wie kann das Vorzeichen verstanden
werden? Für den frei fallenden Ball erhalten wir mit y2 = 0, y1 = h:
W12 = −mg(0 − h) = mgh
(4.78)
Die geleistete Arbeit hat einen positiven Wert, weil die nach unten gerichtete
Gewichtskraft und die Verschiebung von y = h bis y = 0 in dieselbe Richtung
zeigen.
W12 =
/x2
x1
F (x) dx = −k
/x2
x1
x dx = −
(4.80)
#
k" 2
x − x21
2 2
(4.81)
Für x2 > x1 > 0 wird die Feder nach der Bewegung stärker gedehnt sein. In
diesem Fall wirkt die Federkraft der Bewegung entgegen. Die Bewegung und
die Federkraft zeigen in entgegengesetze Richtung. Die von der Kraft geleistete
Arbeit ist negativ:
dW = F · dr < 0
(4.82)
Für 0 < x2 < x1 wird die Feder nach der Bewegung weniger gedehnt sein. In
diesem Fall wirkt die Federkraft in die Richtung der Bewegung. Die Bewegung
und die Federkraft zeigen in dieselbe Richtung. Die von der Kraft geleistete
Arbeit ist positiv:
dW = F · dr > 0
(4.83)
Im Allgemeinen können x1 und x2 positive und negative Werte annehmen,
nämlich für gedehnte oder zusammengedrückte Situationen der Feder. In diesem Fall kann die resultierende Arbeit positiv oder negativ sein. Sie hängt vom
Unterschied der Quadrate der Anfangs- und Endverschiebungen ab. Z.B., wenn
x1 = +a gedehnte Feder
x2 = −a zusammengedrückte Feder
(4.84)
(4.85)
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
141
(Beachte: x = 0 ist das Gleichgewicht der Feder), verschwindet die resultierende
Arbeit:
1
1 0
W12 = − k (−a)2 − (+a)2 = 0
(4.86)
2
Zwischen x = a und x = 0 wirkt die Kraft in die Richtung der Bewegung:
dW > 0. Zwischen x = 0 und x = –a wirkt die Kraft der Bewegung entgegen:
dW < 0. Die beiden Beiträge zur Arbeit kompensieren einander genau.
142
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
Damit gilt:
Epot (y) = mgy
(4.91)
Beispiele:
Gravitationskraft:
Epot (y) = mgy
⇒
W12 = − {Epot (y2 ) − Epot (y1 )} = −mg (y2 − y1 )
(4.92)
⇒
#
1 "
W12 = − {Epot (x2 ) − Epot (x1 )} = − k x22 − x21
2
(4.93)
Federkraft:
4.9
4.9.1
1
Epot (x) = kx2
2
Allgemeine potentielle Energie
Konservative und nicht-konservative Kräfte
In beiden Beispielen, die wir betrachtet haben, ist die von der Kraft geleistete
Arbeit vom zurückgelegten Weg zwischen gegebenem Anfangs- und Endpunkt
unabhängig. Deshalb konnten wir die potentielle Energie als eine Funktion von
Anfangs- und Endpunkt des Wegs definieren.
Wir haben zwei bestimmte Beispiele der geleisteten Arbeit berechnet:
1. die Arbeit der Gravitationskraft:
W12 = −mg (y2 − y1 )
Siehe Abb. 4.12.
(4.87)
y
y2
2. die Arbeit der Federkraft
#
1 "
W12 = − k x22 − x21
2
WA = WB = −mg (y2 − y1 )
(4.88)
Weg A
WA
In beiden Fällen hängt das Ergebnis nur vom Anfangs- und Endpunkt der Bahn
ab, d.h., die Arbeit ist unabhängig vom zurückgelegten Weg.
Wenn ein Ball vom Boden auf die Höhe h hochgezogen wird, hat die von der
Gravitationskraft geleistete Arbeit einen negativen Wert, weil die Gewichtskraft entgegengesetzt der Bewegung ist. Man muss ziehen, um den Ball hochzuheben. Wir sagen, dass die von der Gravitationskraft geleistete Arbeit im
Körper als potentielle Energie Epot der Gravitation gespeichert wird.
Weg B
WB
y2 − y1
Die zwischen Anfangs- und Endpunkt von der Kraft geleistete Arbeit ist gleich
der Änderung der entsprechenden potentiellen Energie zwischen diesen Punkten:
W12 =
2 r2
r1
y1
F (r) · dr ≡ − {Epot (r 2 ) − Epot (r 1 )} ≡ −∆Epot
(4.89)
x
(Beachte das negative Vorzeichen! )
Da die von der Gravitationskraft geleistete Arbeit einen negativen Wert hat,
wenn der Körper nach oben gezogen wird, wird die Änderung der potentiellen
Energie mit einem negativen Vorzeichen definiert:
W12 = −mg (y2 − y1 ) ≡ − {Epot (y2 ) − Epot (y1 )}
(4.90)
Abbildung 4.12: Zur Wegunabhängigkeit der Arbeit im Gravitationsfeld.
Wir bemerken: wenn wir einen Ball vom Boden auf die Höhe h hochziehen und
ihn nachher wieder auf den Boden bringen, ist die geleistete Arbeit gleich null.
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
143
Aus der Definition der potentiellen Energie und ihrer Beziehung zur Arbeit
folgt:
Wenn die geleistete Arbeit nur vom Anfangs- und Endpunkt des Wegs abhängt,
ist sie längs eines geschlossenen Wegs gleich null.
Wir unterteilen daher alle Kräfte der Natur in zwei Gruppen:
1. Konservative Kräfte, wie die Gravitationskraft oder die Federkraft.
Die geleistete Arbeit längs eines geschlossenen Wegs ist gleich null. Für
diese Art von Kräften können wir eine entsprechende potentielle Energie
der Kraft definieren.
2. Nicht-konservative Kräfte, wie die Reibungskräfte. Wir bemerken,
dass die von einer Reibungskraft geleistete Arbeit vom Weg abhängt. Je
weiter wir einen Körper bewegen, der eine Reibungskraft spürt, desto
mehr Arbeit wird geleistet. Wenn wir den Körper an den Anfangspunkt
zurückbringen, ist die geleistete Arbeit nicht gleich null. In diesem Fall
kann keine entsprechende potentielle Energie der Kraft definiert werden.
Zusammenfassend:
Eine potentielle Energie kann nur definiert werden, wenn die Arbeit nur vom
Anfangs- und Endpunkt abhängt. Es folgt daraus, dass nur für konservative
Kräfte eine potentielle Energie definiert werden kann.
4.10
Das Arbeit-Energie-Theorem
Wir beginnen mit Newtons zweitem Gesetz in der vektoriellen Form, multiplizieren beide Seiten mit der infinitesimalen Strecke dr, und integrieren zwischen
r 1 und r 2 :
F = ma ⇒ F · dr = ma · dr
/r2
/r2
/r2
dv
· dr
⇒ F · dr = m a · dr = m
dt
r1
r1
(4.94)
⇒
dv
dv
· dr =
· vdt
dt
dt
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
und erhalten für den Geschwindigkeitsvektor:
d 2
dv
v = 2v ·
dt
dt
Damit ist
/r2
⇒
F · dr = m
r1
dv
dv
1 d " 2#
·r =
· vdt =
v dt
dt
dt
2 dt
/r2
dv
· dr = m
dt
/t2
t1
r1
1 d " 2#
v dt
2 dt
(4.98)
(4.99)
wobei t1 und t2 die Zeiten sind, die den Punkten (1) und (2) entsprechen. Die
zeitliche Integration liefert:
m
/t2
t1
3v(t )
1 d " 2#
1 3 2
1
1
v dt = v 2 33
= mv 22 − mv 21
2 dt
2 v(t1 ) 2
2
(4.100)
Diese Resultate werden als das Arbeit-Energie-Theorem bezeichnet. Es besagt:
Die Arbeit, die an einem Körper zwischen zwei Punkten (1) und (2) geleistet wird, ist gleich der Änderung seiner kinetischen Energie zwischen diesen
Punkten.
/r2
1
1
W12 = F · dr = mv 22 − mv 21
(4.101)
2
2
r1
Die physikalische Interpretation muss klar sein: dass eine Kraft während eines
Zeitintervalls wirken muss, um die Geschwindigkeit eines Körpers zu ändern,
haben wir schon als das Aktionsprinzip (zweites Newtonsches Gesetz, Siehe
Kap. 3.5) erwähnt. Was das Arbeit-Energie-Theorem neu liefert, ist eine quantitative Beziehung zwischen der von Kräften geleisteten Arbeit und der resultierenden Änderung der kinetischen Energie.
Im Fall, dass viele Kräfte auf den Körper wirken, ist die Änderung der kinetischen Energie gleich der gesamten Arbeit, die von allen Kräften geleistet
wird:
(4.95)
W =
r1
Wir bemerken nun, dass der Verschiebungsvektor als Funktion des Geschwindigkeitsvektors ausgedrückt werden kann:
dr = vdt
144
/r2
r1
4.11
F · dr =
/r2
(F 1 + F 2 + . . .) · dr =
r1
/r2
F 1 · dr +
r1
/r2
F 2 · dr + . . . (4.102)
r1
Die mechanische Energie
(4.96)
Nun verwenden wir die Identität (Siehe Kap. 1.5.4), die für einen beliebigen
Vektor a gilt:
d 2
d
da
a = (a · a) = 2a ·
(4.97)
dt
dt
dt
Aus dem Arbeit-Energie-Theorem folgt:
/r2
r1
1
1
F · dr = mv 22 − mv 21 = ∆Ekin
2
2
(4.103)
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
145
wobei F die resultierende Kraft ist, die auf den Körper wirkt: F =
(F 1 + F 2 + . . .). Diese Kraft kann in eine Summe der konservativen und nichtkonservativen Kräfte unterteilt werden:
F = (F 1 + F 2 + . . .)
= F kon + F nk
(4.104)
Die Gesamtarbeit der konservativen Kräfte kann mit Hilfe einer potentiellen
Energie berechnet werden
/r2
F kon · dr = −∆Epot
(4.105)
r1
Die Summe der kinetischen Energie und der potentiellen Energie eines Körpers
wird als mechanische Gesamtenergie Emech bezeichnet:
Emech ≡ Ekin + Epot
(4.106)
Falls nur konservative Kräfte wirken, d.h. F = F kon , erhalten wir mit dem
Arbeit-Energie-Theorem:
/r2
/r2
(4.107)
F · dr = ∆Ekin = F kon · dr = −∆Epot
r1
r1
oder
∆Ekin = −∆Epot
⇒
∆ (Ekin + Epot ) = 0
(4.108)
d.h., die mechanische Energie wird erhalten, wenn nur konservative Kräfte
wirken:
Emech = Ekin + Epot = konst.
(nur konservative Kräfte)
Wenn konservative und nicht-konservative Kräfte wirken, gilt :
/r2
(F kon + F nk ) · dr = ∆Ekin
(4.109)
r1
F kon · dr +
/r2
(4.110)
F nk · dr = ∆Ekin
(4.111)
−∆Epot + Wnk = ∆Ekin
(4.112)
r1
und man kann die Veränderung der mechanischen Energie berechnen:
Wnk = ∆Ekin + ∆Epot = ∆ (Ekin + Epot ) = ∆Emech
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
4.12
Anwendung: Arbeit-Energie-Theorem
4.12.1
Die Fluchtgeschwindigkeit
Die Fluchtgeschwindigkeit ist die minimale Geschwindigkeit, mit der ein
Körper von der Erde abgeschossen werden muss, um das Unendliche zu erreichen (wir nehmen an, dass die Wechselwirkung mit anderen Planeten, Sternen,
Galaxien vernachlässigbar ist).
Die einzige Kraft, die auf den Körper wirkt, ist die Gravitationskraft und ist
gleich:
GmE m r
F =−
(4.114)
r2 r
wobei mE die Masse der Erde ist, und das Zentrum der Erde wurde als Ursprung
des Koordinatensystems gewählt. Das Arbeit-Energie-Theorem sagt voraus:
/r2
F · dr ≡ −GmE m
/r2
1r
1
1
· dr = mv 22 − mv 21
r2 r
2
2
(4.115)
r1
r1
d.h., die Arbeit der resultierenden Kraft, die auf den Körper wirkt, ist gleich
der Änderung der kinetischen Energie des Körpers.
Wir kennen die Bahnkurve des Körpers nicht genau. Wir können trotzdem die
differentielle Strecke dr mit Hilfe der Kugelkoordinaten ausdrücken (in zwei
Dimensionen). Wir betrachten die Geschwindigkeit des Körpers in Kugelkoordinaten (siehe Kap. 2.5.2):
v(t) =
der
dr
dϕ
dr
er + r
= er + r eϕ
dt
dt
dt
dt
(4.116)
Damit ist der differentielle Verschiebungsvektor gleich:
r1
/r2
146
(4.113)
Die Änderung der mechanischen Energie ist gleich der Arbeit, die von nichtkonservativen Kräften geleistet wird.
dr ≡ vdt = dr er + (rdϕ) eϕ
(4.117)
Die differentielle Arbeit über die differentielle Strecke dr ist deshalb gleich
(r = rer ):
%
&
1 rer
dW = F · dr = −GmE m 2
· (dr er + (rdϕ)eϕ )
r r
dr
dr
= −GmE m 2 (er · er ) = −GmE m 2
(4.118)
r
r
d.h., die Arbeit hängt nur von der radialen Bewegung des Körpers über die
Strecke ab (siehe Abb. 4.13). Obwohl der Körper sich sowohl in die radiale
als auch in die Richtung senkrecht dazu bewegt, ist die von der Gravitationskraft geleistete Arbeit gleich der Projektion der Verschiebung auf die radiale
Richtung mal die Kraft.
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
147
148
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
4.13
Beziehung zwischen Kraft und potentieller Energie: Der Gradient
4.13.1
Partielle Ableitungen
Verschiebungsvektor
F
dr
r1
r2
Die Ableitung einer Funktion f (x), die von einer Variablen abhängt, ist gleich:
dr
Änderung der radialen Komponente
df
∆f
= lim
dx ∆x→0 ∆x
Die differentielle Änderung der Funktion f bei einer Änderung dx kann damit
so ausgedrückt werden:
% &
df
df =
dx
(4.124)
dx
dW = F (r) · dr
= −GmE m
1
dr
r2
Wir betrachten nun eine Funktion f (x, y), die von zwei Variablen abhängt.
Wenn y konstant gehalten wird, ist die Änderung der Funktion entlang x gleich:
&
%
&
%
∆f (x, y)
f (x + ∆x, y) − f (x, y)
df |entlang dx = lim
dx = lim
dx
∆x→0
∆x→0
∆x
∆x
(4.125)
In ähnlicher Weise, wenn x konstant gehalten wird, ist die Änderung der Funktion entlang y gleich:
%
&
%
&
f (x, y + ∆y) − f (x, y)
∆f (x, y)
df |entlang dy = lim
dy = lim
dy
∆y→0
∆y→0
∆y
∆y
(4.126)
Die Grössen in Klammer werden als die partiellen Ableitungen der Funktion f
bezeichnet.
Abbildung 4.13: Arbeit bei der Gravitationskraft.
Damit erhalten wir:
1
1
mv 22 − mv 21 = −GmE m
2
2
/r2
r1
/r2
1r
· dr
r2 r
dr
= −GmE m
r2
r1
%
&
1
1
= +GmE m
−
r2 r 1
= −GmE m
%
−
&3r
1 33 2
r 3r1
(4.119)
Um die Fluchtgeschwindigkeit zu berechnen, nehmen wir an, dass die Geschwindigkeit des Körpers gegen null geht, wenn der Körper das Unendliche erreicht
(v 2 → 0, r2 → ∞), v E = v 1 ist dann die Fluchtgeschwindigkeit von der Erdoberfläche (rE =Radius der Erde):
%
&
1
1
1
1
− mv 2E = GmE m
−
= −GmE m
(4.120)
2
∞ rE
rE
oder
2GmE
2GmE rE
=
= 2grE ,
rE
rE2
wobei g die Erdbeschleunigung ist (Siehe Kap. 3.10.1). Schliesslich,
$
$
vE = 2grE ≈ 2 · (9,81 m/s2 ) (6370 km) ≈ 11 km/s
v 2E =
(4.123)
(4.121)
(4.122)
Um die Erde zu verlassen, muss ein Körper auf der Erdoberfläche eine Geschwindigkeit von ungefähr 11 km/s besitzen.
Die partielle Ableitung einer Funktion, die von mehreren Variablen abhängt,
ist die Ableitung nach einer Variablen, während die anderen konstant bleiben:
%
&
%
&
∂f (x, y)
∂f (x, y)
df |entlang dx =
dx und df |entlang dy =
dy
∂x
∂y
(4.127)
Z.B.:
f (x, y) = x2 y 3
∂f
∂f (x, y = konst.)
d (x2 )
⇒
=
= y3
= 2xy 3
∂x
∂x
dx
∂f
∂f (x = konst., y)
d (y 3 )
⇒
=
= x2
= 3x2 y 2
∂y
∂y
dy
(4.128)
Wir betrachten nun die Situation, in der beide Variablen, x und y, sich ändern.
Die gesamte Änderung der Funktion ist in diesem Fall gleich:
∆f = f (x + ∆x, y + ∆y) − f (x, y)
(4.129)
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
149
Wir können die Änderung so ausdrücken:
150
Wir finden z.B. für die Federkraft:
∆f = f (x + ∆x, y + ∆y) + f (x, y + ∆y) − f (x, y + ∆y) −f (x, y)
)
*+
,
Fx = −
≡0
= {f (x + ∆x, y + ∆y) − f (x, y + ∆y)} + {f (x, y + ∆y) − f (x, y)}
%
&
%
&
∂f (x, y + ∆y)
∂f (x, y)
=
∆x +
∆y
(4.130)
∂x
∂y
df =
∂f (x, y)
∂x
&
dx +
%
∂f (x, y)
∂y
&
dy
4.13.2
Allgemein können wir die geleistete Arbeit zwischen zwei Punkten 1 und 2
schreiben als die Differenz der potentiellen Energien, gemessen an den Punkten
1 und 2:
W12 = −∆Epot = − (Epot (r 2 ) − Epot (r 1 ))
(4.133)
Es ist klar, dass die Funktion Epot vom Ort abhängt. Aus der Definition der
potentiellen Energie folgt
F · dr ,
(4.134)
r1
Für infinitesimale Verschiebungen folgt daraus:
dEpot = −F · dr
(4.135)
wobei dEpot der differentiellen Änderung der potentiellen Energie über die infinitesimale Verschiebung dr entspricht. Wenn die Kraft in die x-Richtung wirkt,
d.h.,
F = Fx ex ,
(4.136)
= −kx
(4.139)
(4.140)
= − (Fx dx + Fy dy + Fz dz)
(4.141)
= (−Fx dx) + (−Fy dy) + (−Fz dz)
Die differentielle Änderung der potentiellen Energie kann aber auch als der
Unterschied zwischen den potentiellen Energien in zwei benachbarten Punkten
geschrieben werden:
dEpot = Epot (r + dr) − Epot (r)
(4.142)
d.h.,
dEpot = Epot (x + dx, y + dy, z + dz) − Epot (x, y, z)
(4.143)
Wir können diese Änderung mit Hilfe der partiellen Ableitungen berechnen:
&
%
&
%
&
%
∂Epot (x, y, z)
∂Epot (x, y, z)
∂Epot (x, y, z)
dx +
dy +
dz
dEpot =
∂x
∂y
∂z
(4.144)
Der Vergleich der beiden Gleichungen zeigt, dass jede Komponente der Kraft
gleich der negativen partiellen Ableitung der potentiellen Energie nach der
Komponente sein muss:
∂Epot (x, y, z)
∂x
∂Epot (x, y, z)
Fy = −
∂y
Fx = −
Fz = −
(4.145)
∂Epot (x, y, z)
∂z
Diese drei Gleichungen können als eine einzige vektorielle Gleichung ausgedrückt werden.
erhalten wir
dEpot = −Fx ex · dr = −Fx ex · (dx ex + dy ey + dz ez ) = −Fx dx
&
erhalten wir
(4.131)
(4.132)
/r2
1 2
kx
2
F = Fx ex + Fy ey + Fz ez ,
Die Kraft als Gradient der potentiellen Energie
∆Epot = Epot (r 2 ) − Epot (r 1 ) = −W12 = −
%
dEpot = − (Fx ex + Fy ey + Fz ez ) · (dx ex + dy ey + dz ez )
Wenn wir den Grenzwert ∆x → 0 und ∆y → 0 berechnen, dann gilt:
∆f → df
dEpot
d
=−
dx
dx
Wenn die Kraft in eine beliebige Richtung zeigt, d.h.,
Wir definieren die differentielle Änderung der Funktion f (x, y) als:
%
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
(4.137)
Die Kraft ist somit die negative Ableitung der potentiellen Energie nach der
x-Koordinate:
dEpot
Fx = −
eindimensional
(4.138)
dx
Die Kraft ist durch die partiellen Ableitungen der potentiellen Energie nach
den drei Raumkoordinaten gegeben:
&
%
∂Epot
∂Epot
∂Epot
ex +
ey +
ez
(4.146)
F =−
∂x
∂y
∂z
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
151
Im Allgemeinen kann die Berechnung der partiellen Ableitungen einer beliebigen Funktion von mehreren Variablen als eine Operation, die auf die Funktion
wirkt, betrachtet werden. Diese Operation wird als der Gradient der Funktion bezeichnet:
Der Gradient einer Funktion mehrerer Variablen entspricht der Ableitung der
Funktion nach den Variablen. Er wird mit Hilfe des Nabla-Operator-Symbols
∇ bezeichnet.
In 3 Dimensionen erhalten wir für den Operator :
∇≡
%
∂
∂
∂
ex +
ey + ez
∂x
∂y
∂z
&
(4.147)
152
4.13.3
%
∂f
∂f
∂f
ex +
ey +
ez
∂x
∂y
∂z
&
Epot = Epot (r) = Epot (x, y, z)
(4.154)
Wenn der Körper sich eine Strecke dr = (dx, dy, dz) bewegt, ändert sich seine
potentielle Energie:
dEpot = Epot (x + dx, y + dy, z + dz) − Epot (x, y, z)
(4.155)
Wir können diese Änderung mit Hilfe der partiellen Ableitungen ausdrücken:
dEpot =
∂Epot
∂Epot
∂Epot
dx +
dy +
dz
∂x
∂y
∂z
(4.156)
oder
(4.148)
Die Gradientenoperation kann als die Umkehrung des Linienintegrals betrachtet werden.
Mit dieser Definition gilt:
Die Kraft ist gleich dem negativen Gradienten der potentiellen Energie:
F = −∇Epot
Die geometrische Interpretation des Gradienten
Wir betrachten die Bewegung eines Körpers, auf den nur konservative Kräfte
wirken. Diese Kräfte können durch eine potentielle Energie dargestellt werden:
und damit ist die Wirkung des Operators auf eine Funktion f (x, y, z) gleich
dem Vektor:
∇f (x, y, z) ≡
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
(4.149)
dEpot = ∇Epot · (dx, dy, dz) = ∇Epot · dr
(4.157)
Mit dieser Beziehung können wir die folgenden Situationen diskutieren:
1. Wenn die Verschiebung dr in dieselbe Richtung wie der Gradient zeigt,
ist die Änderung der potentiellen Energie positiv, und die potentielle
Energie des Körpers nimmt maximal zu.
2. Wenn die Verschiebung dr senkrecht zum Gradienten steht, ist die Änderung der potentiellen Energie gleich null, und die potentielle Energie des
Körpers bleibt konstant.
3. Wenn die Verschiebung dr in entgegengesetzte Richtung des Gradienten
zeigt, ist die Änderung der potentiellen Energie negativ, und die potentielle Energie des Körpers nimmt ab.
Beispiel: Gravitationskraft in der Nähe der Erdoberfläche
Die potentielle Energie in der Nähe der Erdoberfläche ist gleich
(4.150)
Der Gradient zeigt in die Richtung der maximalen Änderung der potentiellen
Energie.
wobei z die vertikale Koordinate (d.h., die Höhe) ist. Die entsprechende Gravitationskraft ist:
%
&
∂
∂
∂
F = −∇Epot = −
ex +
ey + ez (mgz)
(4.151)
∂x
∂y
∂z
%
&
∂z
∂z
∂z
= −mg
ex +
ey + ez
(4.152)
∂x
∂y
∂z
= −mgez
(4.153)
Äquipotentiallinien. Wir betrachten die Flächen, die durch die folgende Gleichung definiert werden:
Epot (x, y, z) = mgz ,
Wie erwartet, ist die Gravitationskraft konstant, und sie zeigt nach unten.
Epot (r) = Epot (x, y, z) = konst.
(4.158)
Auf diesen Flächen ist die potentielle Energie konstant.
Ein Körper, der sich auf einer solchen Fläche bewegt, wird eine konstante
potentielle Energie besitzen. Wenn wir zwei Dimensionen betrachten, werden
diese Flächen durch Höhenlinien dargestellt. Die Höhenlinien entsprechen den
Linien, entlang welchen die potentielle Energie konstant ist.
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
153
Wegen der Definition der Kraft, nämlich
154
Physik, SS 2007, Prof. A. Rubbia (ETH Zürich)
Wir erhalten:
F = −∇Epot ,
1
∂ 1
∂
=
∂x r
∂x (x2 + y 2 + z 2 )1/2
#−3/2
1"
= − x2 + y 2 + z 2
(2x)
2
x
=− 3
r
(4.159)
wird die Kraft abwärts und senkrecht zur Höhenlinie zeigen, da
dEpot = ∇Epot dr = 0
(4.160)
wenn dr tangential zur Höhenlinie verläuft.
4.14
Eine entsprechende Herleitung ergibt:
Allgemeine potentielle Energie der Gravitationskraft
Als wir die potentielle Energie der Gravitationskraft berechnet haben, haben
wir benutzt, dass die Gewichtskraft konstant und gleich mg ist. Wir wissen,
dass dies nur in der Nähe der Erde gilt. Allgemein ist die Gravitationskraft
gleich
GmE m r
F =−
(4.161)
r2 r
wobei mE die Masse der Erde, und r der Abstandsvektor zwischen der Masse
m und dem Erdzentrum ist. Wir wollen nun beweisen:
Die allgemeine potentielle Energie, die der Gravitationskraft entspricht, ist
gleich:
GmE m
GmE m
Epot (r) = −
=−
(4.162)
|r|
r
In diesem Fall ist der Nullpunkt der potentiellen Energie im Unendlichen. Wenn
die Entfernung |r| → ∞, geht die potentielle Energie Epot (r) → 0.
Der Ortsvektor kann mit Hilfe seiner kartesischen Komponenten ausgedrückt
werden r = xex + yey + zez . Wir müssen beweisen, dass gilt:
F =−
d.h.,
%
∂Epot
∂Epot
∂Epot
ex +
ey +
ez
∂x
∂y
∂z
&
= −∇Epot ,
&
% &
%
1
GmE m
F = −∇ −
= GmE m∇
r
r
(4.163)
(4.164)
Um den Gradienten zu bestimmen, berechnen wir jede Komponente getrennt:
∇
(4.166)
% &
1
∂ 1
∂ 1
∂ 1
=
ex +
ey +
ez
r
∂x r
∂y r
∂z r
(4.165)
∂ 1
y
=− 3
∂y r
r
und
∂ 1
y
=− 3
∂z r
r
(4.167)
Damit haben wir bewiesen, dass gilt
∇
% &
1
r
1r
1
= − 3 (xex + yey + zez ) = − 3 = − 2
r
r
r
r r
(4.168)
Wenn wir diese Beziehung benutzen, um die Kraft zu berechnen, finden wir
1
GmE m r
F = GmE m∇ = −
r
r2 r
(4.169)