Institut für Leistungselektronik und Elektrische Antriebe Einführung
Werbung

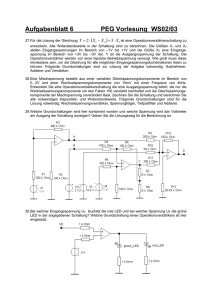
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Einschwingvorgänge Wenn in einem elektrischen Netzwerk ein oder mehrere Energie speichernde Bauelemente (Spule mit der Induktivität L, Kondensator mit der Kapazität C) vorhanden sind, so kann das Netzwerk nicht mehr unendlich schnell auf äußere Änderungen reagieren. Unter Änderungen versteht man einerseits Änderungen in den Ursachen (z. B. die angelegte Quellenspannung ändert sich) und andererseits in der Topologie des Netzwerks (z. B. wenn Schalthandlungen durchgeführt werden). Die Ursache, dass sich unter solchen Umständen keine schlagartige stationäre Strom- und Spannungsverteilung einstellen kann, liegt an den Grundgesetzen für die Bauelemente L und C: u L (t) L di L (t) dt i C (t) C du C (t) dt Man erkennt, dass an der Induktivität die Spannung unendlich groß wird, wenn der Strom einen Sprung ( di L (t) ) aufweist. Am Kondensator wird hingegen der Strom unendlich groß, wenn die Spannung dt einen Sprung ( du C (t) ) aufweist. Beides hätte zur Folge, dass die Quelle eine unendlich große dt Leistung liefern müsste. Da dies nicht sein kann, können die Energie kennzeichnenden Größen (bei L der Strom iL und bei C die Spannung uC) nicht springen, d.h. es muss gelten: u C (t 0 ) u C (t 0 ) bzw. i L (t 0 ) i L (t 0 ) Dabei bezeichnet „t = 0-“ die Zeit kurz vor der Änderung und „t = 0+“ die Zeit kurz nach der Änderung. Die Strom- und Spannungsverhältnisse einer Schaltung erreichen nach einer äußeren Änderung erst nach theoretisch unendlich langer Zeit wieder einen neuen stationären Zustand. Die Zeit nach der Änderung bis zum Erreichen des neuen stationären Zustandes wird als Einschwingzeit bzw. Einschwingphase bezeichnet; in dieser Zeit läuft in der Schaltung ein sogenannter Einschwingvorgang ab. Während des Einschwingvorganges ändern sich die Werte der Ströme und Spannungen mit der Zeit! Insgesamt können drei Zustände des Elektrischen Netzwerkes unterschieden werden: Einführung in die Elektrotechnik 2 Zusatzumdruck zum Thema Einschwingvorgänge - 1/6 - Zustand vor der Änderung t 0 Ausgleichsvorgang (Einschwingvorgang) 0 t Stationärer Endzustand t Dabei wurde angenommen, dass die Änderung zur Zeit t 0 erfolgte. Für die Berechnung von Einschwingvorgängen müssen die Kirchhoffschen Gesetze und die Grundgesetze für R, L und C in ihrer allgemeinsten Form für die Zeitfunktionen verwendet werden, d.h.: Knotenregel: i (t) 0 Maschenregel: u (t) 0 Grundgesetz für R: u R (t) R i R (t) Grundgesetz für L: u L (t) L Grundgesetz für C: i C (t) C di L (t) dt du C (t) dt Die Verwendung dieser Gleichungen führt letztendlich auf lineare Differentialgleichungen für die Energie kennzeichnenden Größen u C (t) bzw. i L (t) . Die Lösung der Differentialgleichungen geben den Verlauf der elektrischen Größen Strom und Spannung während des Einschwingvorgangs wieder. Für t muss der neue stationäre Zustand der Schaltung erreicht werden, d. h. die Amplituden bzw. Effektivwerte der Ströme und Spannungen ändern sich nicht mehr. Der stationäre Zustand der Schaltung kann z. B. mit Hilfe der komplexen Rechnung bestimmt werden. Der Einschwingvorgang selbst kann nicht mit der komplexen Rechnung berechnet werden! Das prinzipielle Vorgehen zur Behandlung von Einschwingvorgängen soll nachfolgend anhand eines Beispiels verdeutlicht werden. In der Schaltung soll lediglich ein einziger Energiespeicher (Induktivität) Einführung in die Elektrotechnik 2 Zusatzumdruck zum Thema Einschwingvorgänge - 2/6 - vorhanden sein. Dies hat zur Folge, dass sich für die Berechnung des Einschwingvorganges eine Differentialgleichung erster Ordnung ergibt, deren Lösung einfach bestimmt werden kann. Bei Schaltungen mit mehreren Energiespeichern entstehen Differentialgleichungen höherer Ordnungen. Beispiel: Zuschalten eines R-L-Gliedes an eine Gleichspannungsquelle mit der Quellenspannung U. i(t) S R L uR(t) uL(t) t=0 U Zur Zeit t = 0 wird das R-L-Glied durch Schließen des Schalters S an die Spannungsquelle U geschaltet. Zustand vor dem Schaltvorgang t < 0: Schalter offen, d.h. i L (t 0 ) 0 , d.h. die Spule ist stromlos! (Anfangsbedingung, AB) Einschwingvorgang t = 0: Schalter wird geschlossen, der Strom i(t) darf nicht springen, d.h. i L (t 0 ) 0 Stationärer Endzustand t = : Stationärer Wert von i(t) ist erreicht. Berechnung des Einschwingvorganges für 0 t : Maschenregel: U u R (t) u L (t) Grundgesetze: u R (t) R i(t) (2) in (1): U R i(t) L (1) und u L (t) L di(t) dt di(t) dt (2) (3) Gleichung (3) ist eine inhomogene lineare Differentialgleichung (DGL) 1. Ordnung. Einführung in die Elektrotechnik 2 Zusatzumdruck zum Thema Einschwingvorgänge - 3/6 - Allgemeine Lösung von (3) ist: i fl (t) i(t) i fl (t) ist (t) (4) flüchtiger Anteil, verschwindet für t ist (t) stationärer Anteil, bleibt für t a) i fl (t) als Lösung der homogenen DGL: 0 i fl (t) L di fl (t) R dt (5) i fl (t) k e pt Lösungsansatz für i fl (t) : (6) Die Konstanten k und p sind noch unbekannt und müssen nachfolgend bestimmt werden! Aus (6): di fl (t) k p e pt dt (6) und (7) in (5): 0 k e pt 1 p (7) L k p e pt R L 0 R p R L (8) b) stationäre Lösung für t : Zur Berechnung der stationären Lösung darf die komplexe Rechnung angewendet werden. Mit WS-Rechnung: I U Z Z R j L mit (9) Hier: Gleichspannung U, d.h. = 0 und somit: UU I I ist 0 Oder kürzer: in (9) liefert ist I U R (10) Für 0 ist auch X L L 0 , d.h. für Gleichstrom ist die Induktivität wirkungslos (Kurzschluss)! Einführung in die Elektrotechnik 2 Zusatzumdruck zum Thema Einschwingvorgänge - 4/6 - c) Gesamtlösung i(t) k e (6), (8) und (10) in (4): t R L U R (11) Der Strom i(t) ist die Energie kennzeichnende Größe und darf daher nicht springen, d. h. es muss gelten: i(t 0 ) i(t 0 ) 0 Mit dieser Anfangsbedingung lässt sich aus Gleichung (11) die Konstante k bestimmen: k U R (12) Gesamtlösung für i(t): i(t) t R U 1 e L R Der Kehrwert der vorher ermittelten Konstanten p besitzt die Dimension der Zeit (Sekunde). Als Abkürzung wird üblicherweise das griechische Formelzeichen (Tau) eingeführt. Abkürzung: L R [] = s Zeitkonstante (13) Tau wird als Zeitkonstante bezeichnet. Die Zeitkonstante ist eine charakteristische Größe für den Einschwingvorgang. Je kleiner die Zeitkonstante ist, desto schneller erfolgt der Einschwingvorgang, d. h. um so weniger Zeit vergeht, bis die Schaltung wieder im neuen stationären Zustand ist. Anmerkung: Theoretisch erreicht die Schaltung erst nach einer unendlich langen Zeit den neuen stationären Zustand. Praktisch jedoch gilt, dass nach einer Zeit von rund 5 der Einschwingvorgang abgeschlossen ist. Einführung in die Elektrotechnik 2 Zusatzumdruck zum Thema Einschwingvorgänge - 5/6 - Zusammenfassung und grafische Darstellung der Ergebnisse des Beispiels: i(t) t U 1 e R (14) t u R (t) U 1 e (15) t u L (t) U e (16) Darstellung der zeitlichen Strom- und Spannungsverläufe: Beispiel mit: U = 10 V R = 0,5 L=1H istat U 10 V 20 A R 0,5 Einführung in die Elektrotechnik 2 Zusatzumdruck zum Thema Einschwingvorgänge L 1H 2s R 0,5 - 6/6 -