1. Schwingungen Fast alles schwingt, d.h. der Zustand ändert sich
Werbung

1. Schwingungen
Fast alles schwingt, d.h. der Zustand ändert sich periodisch mit der Zeit wie in Kreisbewegung. Bsp. Uhr, Kolben im Automotor, wippende Boote auf dem Wasser.
Harmonische Schwingung
die einfachste Schwingung ist die harmonische Schwingung
Frequenz:
f = Anzahl der Schwingungen pro Sekunde
[f] = 1 Hertz = 1 Hz = 1 Schwingung / s = 1 s-1
Periode:
Schwingunsdauer für vollständigen Durchlauf
T=1/f
Bewegung:
[T] = s
x(t) = x0 cos(ωt + ϕ)
x(t):
Auslenkung, Ort
ändert sich mit Zeit t
ωt + ϕ:
Phase
x0
Amplitude, maximale Auslenkung
ω= 2πf
Kreisfrequenz
ϕ:
Phasenkonstante / Verschiebung
konstant
Alter Ort muss nach voller Periode T wieder erreicht werden, also
x0 cosωt = x0 cosω(t + T)
=>
ωT = 2π
Geschwindigkeit
v(t) = dx(t)/dt
= d/dt[x0 cos(ωt + ϕ)]
= - x0 ω sin(ωt + ϕ)
v(t) = v0 sin(ωt + ϕ)] mit v0 = - x0 ω
Beschleunigung
a(t) = dv(t)/dt
= d/dt[- x0 ω sin(ωt + ϕ)]
= - x0 ω2 cos(ωt + ϕ)
a(t) = a0 cos(ωt + ϕ) mit a0 = - x0 ω2
1
Schwingungen treten immer auf, wenn Kraft in Gleichgewichtslage zurück treibt
Harmonischer Oszillator
Federkraft
F = -Dx
Beschleunig.
F = ma
=>
m
ma + Dx = 0
x (m)
aktueller Ort x(t) 0
DGL
d 2x D
+ x=0
dt 2 m
Lösung:
x(t ) = x 0 cos(ω 0 t + ϕ )
Lsg. in DGL − x0ω 02 cos(ω 0 + ϕ ) +
=>
F = -Dx
(im Lernbrief D statt k)
ω0 = D m
(Differentialgleichung)
Lsg. ist Funktion, die jederzeit die DGL erfüllt
k
x0 cos(ω 0 + ϕ ) = 0
m
Eigenfrequenz, charakterist. für System, unabh. von Amplitude
Energie
Die potenzielle Energie eines linearen Oszillators hängt allein vom Zustand der Feder ab
Epot = ½ Dx2
= ½ D x02cos2(ωt +ϕ)
Die kin. Energie hängt allein vom Zustand der Masse, also von der Geschwindigkeit ab
Ekin = ½ mv2
= ½ m x02ω2 sin2(ωt +ϕ)
mit ω = (D/m)½
= ½ x02 D sin2(ωt +ϕ)
Gesamtenergie
E = Ekin + Epot
= ½ D x02 [cos2(ωt +ϕ) + sin2(ωt +ϕ)]
mit cos2(α) + sin2(α) = 1
E = ½ D x02
Lernbrief / Bilder bei mir D statt k
2
-Dx(t)
v(t)
Erzwungene Schwingung
m
Dämpfung
-kv(t)
Exp. gedämpfte Schwingung
x(t)
x (m)
0 Ort zur Zeit t
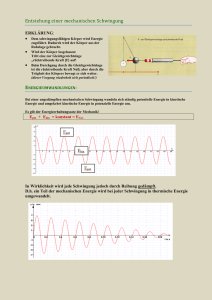
Schwingung : periodische Wandlung von kin. in pot. Energie
Dämpfung:
Reibung verbraucht Energie, die der Schwingung entzogen wird
Reibungskraft
Kräftegleichung
FR = -kv
(gilt nur für langsame Bewegung)
k , [k] = kg/s
Reibungskoeffizient
ma = -kv - Dx
=>
m(d2x/dt2) + k(dx/dt) + Dx = 0
=> DGL
(d2x/dt2) + 2δ(dx/dt) + (k/m) x = 0
x(t) = x0 . exp{-δt}. cos(ω´t + ϕ)
Lsg:
ω′ =
D
− δ 2 = ω02 − δ 2
m
mit Dämpfung δ = k/2m
Funktion des Ortes x(t) des Teilchens
Eigen-Frequenz bei Dämpfung
Neu: Amplitude x0 exp{-δt} fällt exponentiell mit Zeit t
Kreisfrequenz ω´< ω0
(kleiner Effekt)
Abklingzeit: τ = 1/δ => x(1/δ) = x0/e ≈ 0,37x0
Resonanz
Neu zwei schwingende Systeme
a) Schaukel mit eigener Kreisfrequenz ω´
b) äußere anregende Kraft Fa mit Kreisfrequenz ωa
Kräftegleichung
=>
m(d2x/dt2) + k(dx/dt) + Dx = Facos(ωa t)
Beschleunigung
=>
Reibungs- Rückstellkraft
kraft
Externe
Kraft
Bewegungsgleichung beschreibt die Schwingung
(d2x/dt2) + 2δ(dx/dt) + (D/m) x = Fa/m cos(ωa t)
Lsg:
x(t) = x0 cos(ωat - ϕ)
(Differentialgleichung)
Ort des Teilchens für t >> 1/δ
3
x0 = Fa/m[ (ω02 - ωa2)2 + k2ωa2]½
Amplitude
ω0 = (D/m)½
Eigenfrequenz ohne Dämpfung
ω´= (ω02 - δ2)½
Eigenfrequenz mit Dämpfung
ϕ = arctan{2δωa /(ω02 - ωa2)}
Phasenverschiebung System zu Anregung
2. Elastomechanik
Modell: Atome sind durch „Federkräfte“ miteinander verbunden, verhalten sich wie
Hook`sche Feder bei Krafteinwirkung in Längenänderung und / oder Winkeländerung
Mechanische Spannung
F
Kraft
=
A Fläche
[σ ] =
N
= 106 Pa
mm 2
Generell
σ=
Normalspannung:
Kraft senkrecht auf Wirkungsfläche,
Bild 11
Zugspannung, Druckspannung
Tangentialspannung: τ = σ T =
Dehnung
ε=
Δl
l0
FT
A
Bild 12
relative Längenänderung
Dehnungsmodul E
4
Bild 13
Gibt an, welche Spannung nötig ist, um den Körper um einen relativen Anteil zu dehnen
Dehnungsgesetz
Poisson`sche Zahl
σ = Eε
Hook`sches Gesetz
F
Δl
=σ = E
A
l0
vergleiche F = Dx
ν
Längenänderungen gibt es längs und quer zur Kraftwirkung
Bild 14
Die Poisson`sche Zahle gibt das Verhältnis beider relativer Änderungen an
ν=
Δd
d0
Δl
l0
mit etwas Rechnerei folgt für die Volumenänderung
ΔV
= ε (1 − 2ν )
V0
ν < 0,5
Kompressionsmodul K
Druck
p=
F
Kraft
=
A Fläche
p = −K
Bild 15
ΔV
V
großes K: Material lässt sich schwer zusammendrücken
Komressibilität
κ=
1
1 ⎛ ∂V
= − ⎜⎜
K
V0 ⎝ ∂p
⎞
⎟⎟
⎠
Scherung / Torsionsmodul τ
γ ≈ tan γ =
Δx
l0
Bild 16
τ = Gγ
Elastische Energiedichte
Wie groß ist die Energie pro Volumen bei Dehnung, Stauchung, Kompression des Körpers?
Dehnung
w=
1 2
Eε
2
Scherung
w=
1
Gγ 2
2
Kompression
1 ⎛ ΔV
w = K ⎜⎜
2 ⎝ V0
Spannung,
Kraft,
Druck
⎞
⎟⎟
⎠
Arbeit
2
Änderung ε, τ, ΔV/V0
3. Wellen
5
Die Störung eines deformierbaren Mediums (Seil, Luft) breitet sich im Medium aus. Diesen
zeitl. und räuml. veränderlichen Zustand bezeichnet man generell als Welle.
A)
Transversale Welle: Auslenkung senkrecht zur Ausbreitungsrichtung
B)
Longitudinale Welle: Auslenkung in Ausbreitungsrichtung
Schallgeschwindigkeit
c = λf
Ausbreitung eines Wellenberges
Schallschnelle
v =ωs
Geschwindigkeit eines Teilchens in der Welle
Schallgeschwindigkeit
c=
Schall-Intensität
I=
K
ρ
Flüssigkeit, c =
E
κp
Gase, c =
ρ
ρ
Festkörper
1
pmax v max Leistung pro Fläche A
2
Schallpegel: Definition ist an menschliches Hörvermögen angepasst
Minimal hörbare Intensität I0 = 10-12 W/m2
Minimal hörbare Druckänderung Δp = 2,8*10-5 Pa
Maximal erträgliche Änderung Δp = 28 Pa
a) Schallintensitätspegel
β I = 10 ⋅ log
I
I0
b) Schalldruckpegel
β p = 20 ⋅ log
I
I0
Lautstärke: berücksichtigt, dass das Ohr nicht alle Frequenzen gleich stark wahrnimmt.
Dopplereffekt
Prinzip:
Sender und Empfänger bewegen sich relativ zueinander
f `= f
c ± vD
c ± vS
f: Frequenz des Senders,
f `: Frequenz bei Relativbewegung
c: Schallgeschwindigkeit in Luft, Luft ruht
vD: Detektor-Geschwindigkeit relativ zur Luft
vS: Sender-Geschwindigkeit relativ zur Luft
=> Vorzeichen so wählen, dass f `> f wenn Detektor & Sender aufeinander zu laufen !
6