Mathematische Physik: Grundlagen der BCS
Werbung

Mathematische Physik: Grundlagen der
BCS-Theorie
ii
Inhaltsverzeichnis
1 Einführung
1
2 Beschränkte und unbeschränkte Operatoren
5
3 Kompakte Operatoren
11
3.1 Schattenklassen . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2 Hilbert-Schmidt-Operatoren . . . . . . . . . . . . . . . . . . 24
4 Quantenmechanik
31
4.1 Formulierungen der nicht-relativistischen Quantenmechanik 31
4.1.1 Born’sche statistische Interpretation . . . . . . . . . 31
4.2 Axiomatische Formulierung . . . . . . . . . . . . . . . . . . 32
4.3 Vielteilchen-Systeme . . . . . . . . . . . . . . . . . . . . . . 35
4.3.1 Zweite Quantisierung von Operatoren . . . . . . . . 38
4.3.2 Der fermionische Fock-Raum . . . . . . . . . . . . . 40
4.3.3 Bogoliubov-Transformationen . . . . . . . . . . . . . 41
4.3.4 Gemischte Zustände in der Quantenstatistik . . . . . 43
5 Das BCS-Funktional
61
5.1 Herleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.1.1 Schritt 1: Restriktion auf quasi-freie Zustände . . . . 62
5.1.2 Schritt 2: Einschränkung auf SU (2)-invariante Zustände . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.1.3 Schritt 3: Einschränkung auf translations-invariante
Zustände . . . . . . . . . . . . . . . . . . . . . . . . 66
6 Das vereinfachte translations-invariante BCS-Funktional
69
iii
Inhaltsverzeichnis
iv
Kapitel 1
Einführung
Die BCS-Theorie [BCS57] wurde 1957 von Bardeen, Cooper und Schrieffer
eingeführt, um den Phasenübergang bei Supraleitern und später auch bei
Suprafluiden [Leg80; NSR85]) zu erklären. Sie war damit die erste Mikroskopische Theorie auf der Basis von fermionischen Gasen mit lokaler PaarWechselwirkung. Die Herleitung erfolgt in drei Schritten aus dem Grosskanonischen Potential aus der quantenstatistik:
1. Die Einschränkung des Potentials auf sogenannte quasi-freie Zustände.
2. Die Einschränkung auf SU (2)-invariante (und optional auch translationsinvariante) Zustände.
3. Vernachlässigung zweier Energie-Terme (direkte- und Austauschenergie).
Nach diesen Näherungen ist das resultierende Energie-Funktional abhängig von der Temperatur T , dem chemischen Potential µ, dem effektiven
Wechselwirkungspotential V , sowie der 1-Teilchen-Dichte γ zusammen mit
der Cooper-Paar-Wellenfunktion α.
Ein nicht verschwindendes α bedeutet in der BCS-Theorie eine makroskopische Kohärenz der Teilchen, das heisst die Kondensation zu CooperPaaren. Dies motiviert die Charakterisierung einer Superfluiden Phase
durch die Existenz eines Minimierers des BCS-Funktionals für welchen
α 6= 0. Eine rigorose Behandlung des BCS-Funktionals wurde in [Hai+08;
HS08b; HS08a; Fra+07] präsentiert, wobei die Frage untersucht wurde,
für welche Wechselwirkungspotentiale V und welche Temperaturen T eine
suprafluide Phase existiert.
1
Kapitel 1 Einführung
Das translations-invariante BCS-Funktional Setting: Quantengas
/ Festkörper mit einer Temperatur T im chemisches Potential µ. Die Fermionen erfahren eine effektive Paar-Wechselwirkung, beschrieben durch
ein Potential V , vermittelt durch den Festkörper oder das Fermi-Gas selber. Der Ausdruck für das translations-invariante BCS-Funktional ist
kinetische Energie
FTV
z
Z
(Γ) =
Cooper-Paar-Energie
}|
{
2
3
zZ
}|
{
2
3
(p − µ)γ̂(p) d p +
|α(x)| V (x) d x
R3
Z
+T
trC2 Γ(p) ln Γ(p) d3 p
3
| R
{z
}
R3
(1.0.1)
Entropie
Z
−
|
2
R3
3
2
|γ(x)| V (x) d x +2γ(0)
{z
}|
Austausch-Energie
Dabei ist
Γ(p) =
γ̂(p)
α̂(p)
Z
V (x) d3 x
{z
}
R3
Direkte Energie
α̂(p)
1 − γ̂(−p)
,
(1.0.2)
wobei γ die 1-Teilchen Dichte ist und α die Cooper-Paar-Wellenfunktion.
Ziel ist die Beschreibung des Phasenübergangs bei Supraleitern.
Als Nor
malzustand wird der Minimierer Γ0 des Funktionals FTV α=0 bezeichnet.
Der Normalzustand erhält durch diese Definition automatisch die Form
γ̂0 (p)
0
Γ0 (p) =
.
0
1 − γ̂(−p)
Falls nun inf Γ FTV < FTV (Γ0 ), so hat das System eine supraleitende Phase.
Wir müssen also den Grundzustand in Abhängigkeit der Temperatur T
untersuchen. Wir werden feststellen, dass eine kritische Temperatur Tc ≥ 0
existiert, so dass für T < Tc das System eine Supraleitende Phase hat und
für T ≥ Tc keine. Zusätzlich lässt sich für gewisse Spezialfälle ein qualitatives Verhalten der kritischen Temperatur Tc in Abhängigkeit der restlichen
Parameter µ, V ableiten. Weiter kann auch ein Zusammenhang vom BCSFunktional zu anderen Theorien, wie die Ginzburg-Landau-Theorie oder
den Gross-Pitaevskii-Gleichungen hergestellt werden.
2
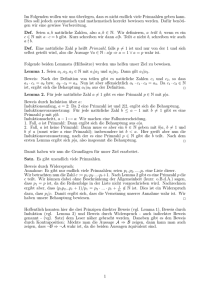
Mathematik
Quantenmechanik
Funktionentheorie
Quantenstatistik
(Grosskanonisches Potential)
Kompakte, Operatoren
Einschränkung
auf quasi-freie
Zustände
Fock-Raum
Quasi-freie Zustände
Bogoliubov-Transformationen
1-Teilchen-Dichte-Matrizen
Allgemeines BCS-Funktional
Einschränkung auf SU(2)invariante Zustände
SU(2)-invariantes BCS-Funktional
Einschränkung auf
translationsinvariante
Zustände
SU(2)-/translationsinvariantes BCSFunktional
Vernachlässigung von
Austausch- und
direkter Energie
Vernachlässigung
von Austauschund direkter
Energie
SU(2)-invariantes BCSFunktional ohne direkte
und Austauschenergie
Einschränkung auf
translationsinvariante Zustände
Ginzbur-LandauTheorie
Hainzl, Seiringer,
e.a.
Gross-PitaevskiiGleichung
SU(2)-/translations-invariantes BCSFunktional ohne direkte und
Austauschenergie
3
Kapitel 1 Einführung
4
Kapitel 2
Beschränkte und unbeschränkte
Operatoren
Definition 2.1 (Banachraum, Hilbertraum)
Ein vollständiger, normierter Vektorraum (X, k · k) ist ein Banach-Raum.
Ist X zusätzlich mit einem Skalarprodukt h·, ·i : X × X → C versehen,
welches gemäss hx, xi = kxk2 die Norm k · k reproduziert, so heisst X
Hilbert-Raum.
Definition 2.2 (separabel)
Ein Banach-Raum oder Hilbert-Raum X heisst separabel, falls eine dichte,
abzählbare Teilmenge von X existiert.
Definition 2.3 (Operatoren)
L(X, Y ) := {B : X → Y |B stetig, linear},
L(X) = L(X, X).
Lemma 2.4
B : X → Y linear. Dann gilt B stetig ⇔ B beschränkt.
Lemma 2.5
dim(X) < ∞ ⇔ x ∈ X kxk ≤ 1 kompakt.
Definition 2.6 (Unbeschränkter Operator)
• Sei H ein Hilbert-Raum. Ein unbeschränkter Operator auf H ist ein
Paar (D(T ), T ), so dass D(T ) ⊂ H – genannt Domäne – und T :
D(T ) → H linear.
5
Kapitel 2 Beschränkte und unbeschränkte Operatoren
• Ist D(T ) ⊂ H dicht, so heisst (D(T ), T ) dicht definiert.
• (D(Te),Te) ist eine Erweiterung von (D(T ), T ), falls D(T ) ⊆ D(Te)
und Te
= T.
D(T )
• (D(T ), T ) heisst abgeschlossen ⇔ Γ(T ) := {(x, y) ∈ D(T ) × H|y =
T x} abgeschlossen.
• (D(T ), T ) heisst abgeschliessbar ⇔ es existiert eine abgeschlossene
Erweiterung (D(Te), Te) von (D(T ), T ).
• Die Adjungierte von (D(T ), T ) ist der (nicht unbedingt dicht
definierte) Operator (D(T ∗ ), T ∗ ) definiert durch D(T ∗ ) = {x ∈
H|hx, T ·i ∈ D(T )∗ }, wobei D(T )∗ = L(D(T ), C) den Dualraum
von D(T ) bezeichnet und T ∗ definiert ist durch hT ∗ x, yi = hx, T yi
∀x ∈ D(T ∗ ), y ∈ D(T ).
• (D(T ), T ) heisst symmetrisch, falls D(T ∗ ) ⊇ D(T ) und T ∗ |D(T ) = T .
• (D(T ), T ) heisst selbst-adjungiert, falls T abschliessbar, D(T ∗ ) =
D(T ) und T ∗ = T .
• (D(T ), T ) heisst essentiell selbst-adjungiert, falls (D(T ), T ) eine
selbst-adjungierte Erweiterung besitzt.
Bemerkung 2.7
(D(T ), T ) abgeschlossen ⇔ D(T ∗ ) ⊂ H dicht.
Definition 2.8 (Spektrum, Resolvente)
Sei H ein Hilbert-Raum, (D(T ), T ) abgeschlossen. Dann definieren wir:
• ρ(T ) := {z ∈ C|T − z : D(T ) → H bijektiv, (T − z)−1 ∈ L(H)} die
Resolvente,
• σp (T ) := {z ∈ C|T − z : D(T ) → H nicht injektiv } das Punktspektrum,
• σc (T ) := {z ∈ C|T − z : D(T ) → H injektiv, im(T − z) & H dicht}
das kontinuierliches Spektrum,
6
• σr (T ) := {z ∈ C|T − z : D(T ) → H injektiv, im(T − z) & H} das
residuelles Spektrum,
• σ(T ) := σp (T ) ∪ σc (T ) ∪ σr (T ) das Spektrum.
Bemerkung 2.9
σ(T ) = C \ ρ(T ).
Satz 2.10
(D(T ), T ) selbst-adjungiert ⇒ σ(T ) ⊆ R.
Satz 2.11 (Charakterisierung des kontinuierlichen Spektrums)
(D(T ), T ) abgeschlossen, λ ∈ σc (T ) ⇒ ∃ approximativer Eigenvektor
{ψn }n∈N von T zu λ, d.h. eine Folge ψn ∈ D(T ), kψn k = 1, mit
(T − λ)ψn → 0.
Beweis
λ ∈ σc (T ) ⇒ ∃χ ∈ H \ im(T − λ). Da im(T − λ) ⊂ H dicht, ∃φn ∈ D(T ),
so dass (T − λ)φn → χ.
φn hat keine konvergente Teilfolge. Nehme an, es gebe eine
Teilfolge φnk , die gegen φ konvergiert. Dann gilt, dass
Behauptung
(φnk , (T − z)φnk ) → (φ, χ) ∈
/ Γ(T − z),
da χ ∈
/ im(T − z). Dies ist im Widerspruch dazu, dass T abgeschlossen ist.
Dann existiert eine Teilfolge {φnk }k∈N von
φ
{φn }n∈N , so dass kφnk k > k. Damit ist ψn := kφnnk k ein verallgemeinerter
k
Eigenvektor.
Fall 1: kφn k nicht beschränkt
Fall 2: kφn k ist beschränkt Nach obiger Behauptung ist φn keine CauchyFolge ⇒ ∃ε > 0 ∀N > 0 ∃mN , nN > N kφmN − φnN k > ε. Dann ist
ψN :=
φ m N − φ nN
kφmN − φnN k
ein verallgemeinerter Eigenvektor, denn
1
k(T − λ)ψN k < k(T − λ)(φmN − φnN )k
ε
1
≤ k(T − λ)φmN − χk + kχ − (T − λ)φnN k → 0.
ε
7
Kapitel 2 Beschränkte und unbeschränkte Operatoren
Theorem 2.12 (Spektralsatz)
(D(T ), T ) selbst-adjungiert ⇒ Es existieren
• Ein endlicher Messraum (X, µ),
• g : X → R messbar,
• U : L2 (X, µ) → H unitär
mit den Eigenschaften
• U −1 T U = Mg , wobei (Mg ϕ)(x) = g(x)ϕ(x),
• U −1 D(T ) = D(Mg ) := {ϕ ∈ L2 (X, µ)|gϕ ∈ L2 (X, µ)},
• U (gϕ) = T (U (ϕ) ∀ϕ ∈ D(Mg ),
• σ(T ) = σ(Mg ) = supp g∗ (µ).
Falls T ∈ L(H) ⇒ g beschränkt.
Lemma 2.13 (Wurzel-Lemma)
2
Sei B ∈ L(H) positiv. Dann
√ existiert A ∈ L(H) positiv, so dass B = A .
Man schreibt dann A = B.
Für einen Beweis wird auf [RS81] verwiesen. Das Wurzel-Lemma erlaubt
die Definition eines Betrags für Operatoren:
Definition 2.14
B ∈ L(H). Dann definiert man
|B| :=
√
B ∗ B.
Theorem 2.15 (Polarzerlegung)
Sei B ∈ L(H). Dann existiert eine partielle Isometrie U ∈ L(H) (d.h.
kU ψk = kψk auf ker(U )⊥ ), so dass K = U |K| und
ker(U ) = ker(K)
im(U ) = im(K)
8
Beweis
Definiere zunächst U : im(|K|) → im(K) als
U (|K|ψ) = Kψ.
Dies ist wohldefiniert, da
k|K|ψk2 = hψ, |K|2 ψi = hψ, K ∗ Kψi = kKψk2
und somit |K|ψ = |K|φ ⇔ Kψ = Kφ. Da U eine Isometrie ist und
somit stetig, Existiert eine Erweiterung U : im(|K|) → im(K). Setze zum
Schluss noch U ≡ 0 auf im(K)⊥ . Da |K| selbstadjungiert ist, gilt auch
im(|K|)⊥ = ker(|K|) = ker(K).
9
Kapitel 2 Beschränkte und unbeschränkte Operatoren
10
Kapitel 3
Kompakte Operatoren
Lemma 3.1
Seien X, Y Banachräume, K ∈ L(X, Y ). Dann sind äqzuivalent:
(1) xn ∈ X beschränkt ⇒ Kxn ∈ Y hat konvergente Teilfolge
(2) B ⊂ X beschränkt ⇒ KB ⊂ Y kompakt.
(3) Kxkxk ≤ 1 ⊂ Y kompakt.
Definition 3.2 (Kompakte Operatoren)
K ∈ L(X, Y ) heißt kompakt, falls er diese drei äquivalenten Bedingungen
erfüllt. Wir bezeichnen die Menge der kompakten Operatoren mit K(X, Y )
und K(X) := K(X, X).
Beispiel 3.3
• Der Satz von Rellich besagt, dass die Einbettung ι : H 1 (Ω) → L2 (Ω)
kompakt ist.
• Alle Operatoren T mit endlichem Rang (dim(im T ) < ∞) sind kompakt.
Beweis von Lemma 3.1
(1)
Sei yn ∈ KB mit yn = Kxn , xn ∈ B ⇒ xn ist beschränkt ⇒ Kxn
hat konvergente Teilfolge ynj = Kxnj ⇒ ynj Cauchy. Jede Folge in KB
hat also eine Cauchy-Teilfolge. Sei zn ∈ KB ⇒ ∃yn ∈ KB kyn − zn k < n1 .
Wegen obigem Argument existiert eine Cauchy-Teilfolge von yn und somit
auch eine von zn . Diese konvergiert in KB.
(2)⇒(3). Nehme B = x ∈ X kxk ≤ 1 .
(1)⇒(2)
11
Kapitel 3 Kompakte Operatoren
(3)
xn ∈ X beschränkt ⇒ ∃c > 0, so dass kxn k < c ⇒ K xcn hat
konvergente Teilfolge ⇒ Kxn hat konvergente Teilfolge.
(3)⇒(1)
Theorem 3.4
Seien X, Y, Z Banachräume. Dann gilt
(1) A ∈ L(X, Y ), B ∈ L(Y, Z) und A kompakt oder B kompakt ⇒ BA ∈
L(X, Z) kompakt.
n
(2) Kn ∈ K(X, Y ), n ∈ N, Kn −
→ K ⇒ K ∈ K(X, Y ).
Beweis
B kompakt ⇒ BA kompakt: klar, da kAk < ∞. Falls A kompakt,
dann ist A(U ) kompakt für alle beschränkten Mengen U ⊂ X. Da B stetig
ist auch (BA)(U ) = B(A(U )) kompakt, da für alle Folgen xn ∈ U die
Folge Axn eine Teilfoge mit Grenzwert y ∈ Y besitzt und somit die Folge
(BA)xn eine Teilfolge mit Grenzwert By ∈ Z besitzt.
(1)
(2) Sei xn eine beschränkte Folge. Wir konstruieren mit Hilfe des Cantorschen Diagonalisierungsverfahrens eine Teilfolge von xnk , so dass Km xnk
eine Cauchy-Folge ist für alle m ∈ N: Da K1 kompakt ist, existiert eine
(1)
(1)
Teilfolge xn von xn , so dass K1 xn konvergiert (eine Cauchy-Folge ist).
(m)
(m−1)
(m)
Definiere nun rekursiv Teilfolgen xn von xn
, so dass Km xn einen
(n)
Grenzwert hat und somit Cauchy ist. Dann ist die Diagonalfolge Km xn
(k)
Cauchy für alle m ∈ N. Setze also xnk = xk .
Behauptung: Kxnk ist eine Cauchy-Folge. Gebe ε > 0 vor. Wähle
m ∈ N, so dass kKm − Kk < 3ε (Km konvergiert in Norm gegen K) und
N ∈ N, so dass ∀i, j ≥ N : kKm xni − Km xnj k < 3ε (Km xnk ist Cauchy
für alle m ∈ N). Falls i, j ≥ N gilt jetzt
kKxni − Kxnj k ≤ k(K − Km )xni k + kKm (xni − xnj )k + k(K − Km )xnj k
{z
} |
|
{z
} |
{z
}
<ε/3
<ε/3
<ε/3
< ε.
Somit ist auch Kxnk eine Cauchy-Folge und Kxn hat eine konvergente
Teilfolge, d.h. K ist kompakt.
12
Ab sofort: X = Y = H, H separabel.
Theorem 3.5
K ist kompakt ⇔ ∃Kn ∈ L(H) mit endlichem Rang (dim(im Kn ) < ∞)
n
und Kn −
→ K.
Beweis
Wähle eine Orthonormalbasis {ϕn }∞
n=1 und definiere Kn =
hϕ
,
·iKϕ
.
Dann
ist
die
Folge
j
j
j=1
(⇐) :
Pn
kK − Kn k =
sup
kKψk
ψ∈span{ϕj }∞
j=n+1
kψk=1
eine monoton fallende Folge (die von unten durch 0 beschränkt ist) die
gegen ε ≥ 0 konvergiert. Es existiert also eine Folge ψn ∈ span{ϕj }∞
j=n+1
mit kψn k = 1, so dass kKψn k ≥ ε. Da K kompakt ist, existiert eine
Teilfolge ψnk , so dass limk→∞ Kψnk = η ∈ H.
ψn * 0
P∞
Sei χ ∈ H mit Entwicklung χ = j=1 cj ϕj . Dann gilt
Behauptung:
1/2
X
∞
X
∞
|cj |2 .
|hχ, ψn i| = |h
cj ϕj , ψn i| ≤ cj ϕj nk =
|kψ
{z
}
j=n+1
j=n+1
j=n+1
∞
X
1
Nach der Besselschen Ungleichung konvergiert die rechte Seite gegen 0,
was die Behauptung zeigt.
Mit ψn * 0 gilt automatisch auch Kψn * 0, denn für χ ∈ H ist
hχ, Kψn i = hK ∗ χ, ψn i → 0.
Da Kψnk gegen η konvergiert und gleichzeitig schwach gegen 0, muss gelten
dass η = 0, denn
0 = lim hψn , ηi = hη, ηi = kηk2 .
n→∞
n
η = 0 impliziert aber, dass ε = 0 und somit Kn −
→ K.
13
Kapitel 3 Kompakte Operatoren
n
Nehme an, Kn −
→ K mit Operatoren Kn endlichen Ranges. Da Kn
endlichen Rang hat, ist Kn kompakt und wir können Theorem 3.4 (2)
anwenden um zu schließen, dass K kompakt ist.
(⇒) :
Definition 3.6 (Normale Operatoren)
N : D(N ) → H heißt normal, falls D(N ) = D(N ∗ ) und kN ψk = kN ∗ ψk
∀ψ ∈ D(N ).
Bemerkung 3.7
Die übliche Definition für N ∈ L(H) ist N ∗ N = N N ∗ .
Lemma 3.8
Für einen normalen Operator N gilt
(1) ker(N ) = ker(N ∗ ),
(2) im(N ) = im(N ∗ ),
(3) ker(N − z) = im(N − z)⊥ ,
∀z ∈ C.
Beweis
(1)
N ψ = 0 ⇔ kN ψk = 0 ⇔ kN ∗ ψk = 0 ⇔ N ∗ ψ = 0,
(2)
im(N ) = ker(N ∗ )⊥ = ker(N )⊥ = im(N ∗ )
(3)
Folgt aus ((1)) und ker(T ) = im(T ∗ )⊥ ∀T ∈ L(H).
Die Eigenschaft ((3)) zeigt, dass das Restspektrum
σr (N ) = {z ∈ C| ker(N − z) = {0}, im(T − z) 6= H}
leer ist, denn im(T − z) 6= H ⇒ ker(T − z) 6= {0}. Wegen der Charakterisierung des kontinuierlichen Spektrums (Satz 2.11) gibt es zu jedem z ∈
σ(N ) mindestens einen verallgemeinerten Eigenvektor, d.h. ψn ∈ D(N ),
kψn k = 1 und (T − z)ψn → 0.
14
Theorem 3.9 (Spektralsatz für kompakte, normale Operatoren)
Sei T ∈ L(H) kompakt und normal. Dann gilt
(1) σ(T ) \ {0} = σp (T ) \ {0}.
∞
(2) σp (T ) = {λi }∞
i=1 , so dass {λi }i=1 höchstens 0 als Häufungswert hat
und dim ker(T − λi ) < ∞.
(3) Es existiert eine Orthonormalbasis {ϕi } von ker(T )⊥ , so dass
T =
∞
X
λn hϕn , ·iϕn .
n=1
Beweis
(1) Falls z ∈ σ(T ) \ {0}, so gibt es einen verallgemeinerten Eigenvektor
ψn ∈ H, kψn k = 1 und (T − z)ψn → 0. Da T kompakt ist, existiert eine
Teilfolge ψnk , so dass limk→∞ Kψnk = η ∈ H existiert. Somit konvergiert
auch zψnk gegen η oder ψnk → ηz . Das heißt aber, dass (T − z)η = 0 und
somit z ∈ σp (T ).
Die Zerlegung folgt sofort aus (1), falls Eigenvektoren zu unterschiedlichen Eigenwerten senkrecht aufeinander stehen.
Sei (T − λ)ψλ = (T − µ)ψµ = 0. Dann gilt wegen Lemma 3.8, (1) dass
(T ∗ − λ)ψλ = 0 und somit
(3)
(λ − µ)hψλ , ψµ i = hλ̄ψλ , ψµ i − hψλ , µψµ i = hT ∗ ψλ , ψµ i − hψλ , T ψµ i = 0.
Wir zeigen, dass σp (T )\Bε (0) für jedes ε > 0 nur endlich viel Elemente
enthält und dass ker(T − λi ) endlichdimensional ist. Da Eigenvektoren
zu unterschiedlichen λ ∈ σp (T ) senkrecht aufeinander stehen, ist obige
Behauptung äquivalent dazu, dass
M
V =
ker(T − λi )
(2)
λ∈σp (T )\Bε (0)
endlichdimensional ist. Wegen (3) ist k T |V k > ε. Da T kompakt ist, ist
T (V ∩ B1 (0)) kompakt und somit auch V ∩ Bε (0) ⊆ T (V ∩ B1 (0)). Dies
geht aber nur wenn V endlichdimensional ist.
15
Kapitel 3 Kompakte Operatoren
Satz 3.10 (Entwicklung von kompakten Operatoren)
Sei K ∈ K(H). Dann existieren Orthonormalfolgen {ϕn }n∈N und {ψn }n∈N
und Zahlen sn ≥ 0 mit limn→∞ sn = 0, so dass
X
X
K=
sn hϕn , ·iψn ,
K∗ =
sn hψn , ·iϕn .
n∈N
n∈N
Beweis
Da K ∗ K kompakt, positiv und selbstadjungiert (und somit normal) ist,
können wir den Spektralsatz für kompakte, normale Operatoren anwenden.
K ∗K =
X
λn hϕn , ·iϕn ,
λn > 0.
n∈N
Setze sn =
malfolge:
√
λn und ψn =
hψn , ψm i =
1
sn Kϕn .
Dann bildet {ψn }∞
n=1 eine Orthonor-
1
λm
hϕn , K ∗ Kϕm i =
hϕn , ϕm i = δmn .
sn sm
sn sm
Ebenfalls gilt
Kψ =
X
n∈N
hϕn , ψi Kϕn .
| {z }
sn ψn
Korollar 3.11
kKk = sup sn .
n∈N
Korollar 3.12
Falls K ∈ K(H), so ist auch K ∗ ∈ K(H).
16
Satz 3.13 (Min-Max-Prinzip)
Sei T ∈ K(H) positiv, mit Eigenwerten λ1 , λ2 , . . . > 0. Dann gilt
(1) λn =
(2) λn =
max
min
dim(V )=k v∈V \{0}
V ⊂ker(V )⊥
min
hv, T vi
,
kvk
max
dim(V )=k−1 v∈V ⊥ \{0}
hv, T vi
.
kvk
Beweis
Sei ϕj der zu λj gehörige Eigenvektor, so dass
X
T =
λj hϕj , ·iϕj .
j≥1
Setze Vn := span{ϕ1 , . . . , ϕn }.
(1)
Wir zeigen
hv, T vi
min
≤ λn ,
v∈V \{0} kvk
hv, T vi min
= λn .
v∈V \{0} kvk V =V
n
Falls V ⊂ ker(V )⊥ mit dim(V ) = n, so ist entweder V ∩ Vn⊥ 6= 0 oder
V ∩ Vn⊥ = 0. Im ersten Fall existiert v ∈ V ∩ Vn⊥ , so dass für dieses v gilt
X
hv, T vi =
λj |hϕj , vi|2 ≤ λn+1 kvk2 ≤ λn kvk2 .
j≥n+1
Im anderen Fall, ist die orthogonale Projektion Pn : H → Vn auf Vn ,
eingeschränkt auf V bijektiv. Betrachte v = ( Pn |V )−1 (ϕn ). Der Vektor v
lässt sich gemäss v = ϕn + w zerlegen in ϕn und w ∈ Vn⊥ , und es gilt
hv, T vi = λn + hw, T wi ≤ λn + λn+1 kwk ≤ λn kvk2 .
Sei jetzt V = Vn und v ∈ V . Dann gilt
hv, T vi ≥ λn kvk2
mit Gleichheit für v = ϕn .
17
Kapitel 3 Kompakte Operatoren
(2)
Wir zeigen
hv, T vi
max
≥ λn ,
⊥
v∈V \{0} kvk
hv, T vi min
= λn .
v∈V ⊥ \{0} kvk
V =Vn−1
Für V = Vn−1 und v ∈ V ⊥ erhalten wir analog zu vorher
hv, T vi ≤ λn kvk2 ,
mit Gleichheit für v = ϕn . Falls V ⊂ H mit dim(V ) = n − 1. Da die
Dimension von Vn um eins grösser ist als von V , existiert v ∈ V ⊥ ∩ Vn und
damit
hv, T vi ≤ λn kvk2 .
3.1 Schattenklassen
Definition 3.14 (Spur)
Sei A ∈ L(H) und {ϕn }∞
n=1 eine Orthonormalbasis von H. Dann ist die
Spur von A definiert als
tr(A) =
∞
X
n=1
18
hϕn , Aϕn i.
3.1 Schattenklassen
Satz 3.15 (Eigenschaften der Spur)
(0) tr(|A|) ist unabhängig von der Wahl der Basis.
Falls tr(|A|) < ∞ (A Spurklasse), dann gilt
(1) tr(|A|) ist unabhängig von der Wahl der Basis und
tr(U AU −1 ) = tr(A),
für U unitär,
(2) tr(A) konvergiert absolut,
(3) tr ist linear,
(4) 0 ≤ A ≤ B ⇒ tr(A) ≤ tr(B),
(5) tr(A∗ ) = tr(A),
(6) tr(AB) = tr(BA) für B ∈ L(H).
Beweis
(2)
Schreibe A = U |A|1/2 |A|1/2 . Dann ist
|hϕn , Aϕn i| ≤ k|A|1/2 U ∗ ϕn kk|A|1/2 ϕn k.
Also
∞
X
n=1
|hϕn , Aϕn i| ≤ (
∞
X
n=1
k|A|1/2 U ∗ ϕn k2 )1/2 (
∞
X
k|A|1/2 ϕn k2 )1/2 .
n=1
Der Operator U |A|U ∗ ist positiv. Wir wissen also in diesem Fall schon,
dass die Spur unabhängig von der Wahl der Basis ist. Sei φen eine Orthonormalbasis von ker(A)⊥ . Vervollständige φen und ψen = U ∗ φen zu Ortho-
19
Kapitel 3 Kompakte Operatoren
∞
normalbasen {φn }∞
n=1 und {ψn }n=1 auf ganz H. Dann gilt
∞
X
k|A|1/2 U ∗ ϕn k2 =
n=1
=
∞
X
hϕn , U |A|U ∗ ϕn i =
∞
X
hφn , U |A|U ∗ φn i
n=1
n=1
∞
X
∞
X
n=1
n=1
hψen , |A|ψen i ≤
hψn , |A|ψn i = tr(|A|).
Also
∞
X
|hϕn , Aϕn i| ≤ tr(|A|) < ∞,
n=1
da A ∈ I1 (H) und die Summe konvergiert absolut. Rest: Übung.
Definition 3.16 (Schattenklassen)
Sei K ∈ K(H). K ist in der p-ten Schattenklasse, 1 ≤ p < ∞, falls
tr(|K|p ) < ∞,
|K| =
√
K ∗ K.
Dabei wird |K|p über die Spektralzerlegung definiert:
|K|p =
X
λpj hϕj , ·iϕj .
j≥1
Wir bezeichnen die p-te Schattenklasse mit Ip (H) und definieren eine
Norm
kKkp = [tr(|K|p )]1/p .
Der Spezialfall I1 (H) wird als die Menge der Spurklasse-Operatoren bezeichnet und I2 (H) als die Menge der Hilbert-Schmidt-Operatoren.
Lemma 3.17
P∞
Sei K ∈ Ip (H) und K = j=1 sj (K)hϕj , ·iψj die Entwicklung von K.
Dann gilt
∞
X
kKkpp =
sj (K)p .
j=1
20
3.1 Schattenklassen
Beweis
Wähle in der Reihe der Spur eine Vervollständigung von {ϕn }∞
n=1 als Orthonormalbasis von H.
Korollar 3.18
Sei p ≥ q ≥ 1.
(1) kAk ≤ kAkp ≤ kAkq ≤ kAk1 .
(2) K ∈ Ip (H) und B ∈ L(H) ⇒ kKBkp ≤ kBkkKkp , kBKkp ≤
kBkkKkp .
Beweis
Folgt direkt aus den Eigenschaften der k · kp -Norm auf den lp (R)Räumen.
(1)
(2)
Es gilt
hv, |BK|2 vi = kBKvk2 ≤ kBk2 kKvk2 = kBk2 hv, |K|2 vi.
Wegen dem Min-Max-Prinzip (Satz 3.13) folgt
sn (|BK|)2 = sn (|BK|2 ) ≤ kBk2 sn (|K|2 ) = kBk2 sn (|K|)2 .
Für die Ungleichung für den Operator KB verwende, dass kKBkp =
kB ∗ K ∗ k und wende das Argument für den Operator BK an auf die Operatoren B ∗ und K ∗ .
Satz 3.19 (Hölder-Ungleichung für die Schatten-Norm)
Sei A ∈ Ip (H) und B ∈ Iq (H) für p1 + 1q = 1. Dann ist AB ∈ I1 (H)
kABk1 ≤ kAkp kBkq .
Beweis
Es genügt zu zeigen, dass tr(AB) ≤ kAkp kBkq , denn mit der Polarzerlegung für AB = U |AB| gilt
kABk1 = tr(|AB|) = tr(U ∗ AB) ≤ kU ∗ Akp kBkq = kAkp kBkq ,
21
Kapitel 3 Kompakte Operatoren
√
√
A∗ U U ∗ A = A∗ A = |A|. Seien
X
X
fn
sn (A)hϕn , ·if
ϕn ,
B=
A=
sn (B)hφn , ·iφ
da |U ∗ A| =
n≥1
n≥1
die Singulärwert-Zerlegungen von A und B. Dann (vervollständige ϕn zu
einer Basis von H):
X
X
tr(AB) =
hϕn , ABϕn i =
sn (A)sm (B) hf
ϕn , φm ihφf
m , ϕn i .
|
{z
}
n∈N
n,m∈N
=:kmn
Die Zahlen kmn erfüllen
X
|kmn |
Cauchy-Schwarz
≤
sX
|hf
ϕn , φm
i|2
sX
m∈N
m∈N
2
|hφf
m , ϕn i| = 1.
m∈N
P
|kmn | ≤ 1. Somit
X
tr(AB) =
sn (A)sm (B)kmn
Genauso:
n∈N
n,m∈N
X
≤
sn (A)|kmn |1/p sm (B)|kmn |1/q
n,m∈N
p1
Hölder
X
≤
1
p
(sn (A)|kmn | )p
(sm (B)|kmn | )q
# p1 "
X
n∈N
≤ kAkp kBkq .
1
q
n,m∈N
n,m∈N
"
≤
q1
X
sn (A)
1/p
X
|kmn |
n∈N
|
# q1
X
sm (B)
m∈N
{z
≤1
}
1/q
X
|
Satz 3.20 (Minkowski-Ungleichung für die Schatten-Norm)
1 ≤ p < ∞, A, B ∈ Ip (H). Dann
kA + Bkp ≤ kAkp + kBkp .
22
|kmn |
n∈N
{z
≤1
}
3.1 Schattenklassen
Beweis
Zuerst wird der Fall p = 1 behandelt:
kA + Bk1 = tr U ∗ (A + B) = tr(U ∗ A) + tr(U ∗ B) ≤ kAk1 + kBk1 ,
wenn A + B = U |A + B| die Polarzerlegung von A + B ist. Der Fall p > 1
kann mit Hilfe des folgenden Lemmas auf p = 1 zurückgeführt werden.
Lemma 3.21
1 ≤ p < ∞, A ∈ Ip (H) ⇒
kAkp =
sup
kABk1 ,
für
B∈Iq (H)
kBkq =1
1 1
+ = 1.
p q
Dies wenden wir jetzt auf kA + Bkp an um die Minkowsi-Ungleichung
zu beweisen. Für p > 1, wende nun das Lemma an:
kA + Bkp =
kK(A + B)k1
sup
K∈Iq (H)
kKkq =1
≤
kKAkp +
sup
sup
kKBkp
K∈Iq (H)
kKkq =1
K∈Iq (H)
kKkq =1
= kAkp + kBkq .
Beweis von Lemma 3.21
Sei B ∈ Iq (H) mit kBkq = 1. Dann ist wegen Hölder schon klar, dass
p−1
|A|
kABk1 ≤ kAkp . Gleichheit wird angenommen für B = kAk
, denn
p
kBkq = (tr |B|q )1/q =
1
(tr |A|(p−1)q )1/q = 1,
| {z }
kAkp−1
p
kAkp
p
wobei wir q =
p
p−1 ,
bzw. q/p =
1
p−1
verwendet haben. Weiter
√
∗
A B) =
kABk1 = tr( B ∗ A
|{z}
|A|2
p
1
2p
p−1 tr( |A| ) = kAkp .
kAkp
23
Kapitel 3 Kompakte Operatoren
3.2 Hilbert-Schmidt-Operatoren
In diesem Abschnitt wollen wir Integraloperatoren K ∈ L(H) der Form
Z
(Kψ)(x) =
K(x, y)ψ(y) dd y
Rd
untersuchen. Wir werden sehen, dass K kompakt ist, falls K(·, ·) ∈ L2 (Rd ×
Rd ).
Theorem 3.22
I2 L2 (Rd ) ∼
= L2 (Rd ) ⊗ L2 (Rd ) ∼
= L2 (Rd ⊕ Rd ).
Genauer gilt: K ∈ I2 L2 (Rd ) (Hilbert-Schmidt)
genau dann wenn
R
K(·, ·) ∈ L2 (Rd × Rd ) existiert mit (Kψ)(x) = Rd K(x, y)ψ(y) dd y. In
diesem Fall gilt
Z
kKk2 =
|K(x, y)|2 dd x dd y.
Rd ×Rd
Lemma 3.23
Sei K(·, ·) ∈ L2R(Rd × Rd ). Dann gilt für den zugehörige Integraloperator
mit (Kψ)(x) = Rd K(x, y)ψ(y) dd y, dass
kKk ≤ kK(·, ·)kL2 (Rd ×Rd ) .
Beweis
Z
2
d
d kKψk =
d K(x, y)ψ(y) d y d x
d
R
R
Z Z
Cauchy-Schwarz
2 d
2
≤
|K(x, y)| d ykψk
dd x
Rd
Rd
Z
=
|K(x, y)|2 dd x dd ykψk2 .
2
Z
Rd ×Rd
Beweis von Theorem 3.22
24
3.2 Hilbert-Schmidt-Operatoren
(⇐) Sei {ϕn }∞
n=1 eine Orthonormalbasis von H Dann lässt sich K(x, y)
wie folgt entwickeln
XZ
K(x, y) =
K(x, t)ϕn (t) dd t ϕn (y)
n∈N
=
Rd
X Z
m,n∈N |
Rd ×Rd
K(s, t)ϕm (s)ϕn (t) dd s dd t ϕm (x)ϕn (y)
{z
}
=:kmn
PN
Approximiere K(x, y) durch KN (x, y) =
kmn ϕm (x)ϕn (y).
m,n=1
R
Der zugehörige Integraloperator (KN ψ)(x) = Rd KN (x, y)ψ(y) dd y
lässt sich schreiben als
KN =
N
X
kmn hϕn , ·iϕm
m,n=1
und hat endlichen Rang. Da mit Hilfe der Parseval-Gleichung folgt,
dass
N →∞
kK(·, ·) − KN (·, ·)kL2 (Rd ×Rd ) −−−−→ 0,
N →∞
gilt wegen Lemma 3.23 auch dass kK −KN k −−−−→ 0 und wir schließen, dass K kompakt ist. Schließlich lässt sich die Spur tr(K ∗ K)
abschätzen, wie folgt
∞
2
∞ X
X
tr(K K) =
kKϕk k =
kmn ϕm δkn k=1
k=1 m,n=1
(3.2.1)
Z
∞
X
2 Parseval
2 d
d
=
|kmn |
=
|K(x, y)| d x d y.
∗
∞
X
2
Rd ×Rd
m,n=1
PN
(⇒) Falls K ∈ I2 (H) ist, approximiere K durch KN = n=1 Kϕn hϕn , ·i.
KN ist dann ein Integraloperator mit Integralkern
KN (x, y) =
N
X
(Kϕn )(x)ϕn (y).
n=1
25
Kapitel 3 Kompakte Operatoren
Da K − KN =
P
n>N
Kϕn hϕn , ·i, gilt
∗
kK − KN k22 = tr(K ∗ (K − KN )) + tr(KN
(KN − K))
|
{z
}
0
=
X
∗
N →∞
(3.2.2)
hϕn , K Kϕn i −−−−→ 0.
n>N
Nach (3.2.1) gilt, dass die Einbettung ι : L2 (Rd × Rd ) → I2 (H),
K(·, ·) 7→ K eine Isometrie ist. Das heißt, dass das Bild von ι (das
ist die Menge der Integraloperatoren) abgeschlossen ist. Mit (3.2.2)
ist K ∈ im(ι) und ist daher auch ein Integraloperator.
Korollar 3.18, (1) besagt, dass für K ∈ I L2 (Rd ) gilt dass kKk2 ≤
kKk1 . Somit sind die Spurklasse-Operatoren gleichzeitig auch HilbertSchmidt-Operatoren. Die Hilbert-Schmidt-Norm kKk2 kann gemäss Theorem 3.22 durch die L2 -Norm des zugehörigen Integralkerns K(·, ·) ausgedrückt werden. Es stellt sich die Frage, ob auch die Spurnorm kKk1 oder
auch die Spur durch K(·, ·) ausgedrückt werden kann. Folgender Ausdruck
würde sich dabei anbieten:
?
Z
tr(K) =
K(x, x) dd x.
(3.2.3)
Rd
In diesem Ausdruck wird aber über eine Nullmenge bezüglich L2 (Rd ⊕ Rd )
integriert. Dadurch ist dieser Ausdruck nicht wohldefiniert, da K(x, x) beliebig umdefiniert werden kann, ohne den zugehörigen Hilbert-SchmidtOperator zu verändern. Das folgende Lemma zeigt, wie die Diagonale
K(x, x) zu definieren ist, damit (3.2.3) funktioniert.
26
3.2 Hilbert-Schmidt-Operatoren
Lemma 3.24 (Griesemer, Hantsch1 )
Es existiert eine lineare beschränkte Abbildung
ρ : I L1 (Rd ) → L1 (Rd )
K 7→ ρK
welche eindeutig durch hψ, ·iϕ 7→ ψ(x)ϕ(x) definiert ist. Die Abbildung ρ
hat die folgenden Eigenschaften:
Z
(1)
ρK (x) dd x = tr(K),
Rd
Z
(2)
|ρK (x)| dd x ≤ tr(|K|).
Rd
Bemerkung 3.25
Die Funktion ρK kann durch die Singulärwertzerlegung
X
K=
sj ϕj hφj , ·i
j≥1
gewonnen werden und zwar durch
X
ρK (x) =
sj ϕj (x)φj (x).
(3.2.4)
j≥1
Alternativ kann ρ auch mit Hilfe von approximativen
δ-Funktionen konR
struiert werden: Sei J ∈ C0∞ (Rd ), mit J ≥ 0 und Rd J(x) dd x = 1. Definiere die approximativen δ-Funktionen Jε (y) := ε−d J(y/ε) und Jε,x (y) :=
Jε (y − x). Dann gilt
ρK (x) = lim hJε,x , KJε,x i.
ε→0
(3.2.5)
Beweis
Eindeutigkeit: Die Abbildung ρ ist eindeutig, weil sie durch Linearität und
Stetigkeit komplett über ihre Wirkung auf Rang-1-Operatoren festgelegt
ist.
1 Siehe
Lemma 4 von [GH12]
27
Kapitel 3 Kompakte Operatoren
Existenz:
Wir zeigen, dass der Limes (3.2.5) existiert. Beachte, dass
hJε,x , ϕi = (Jε ∗ ϕ)(x).
(*)
Dadurch existiert (3.2.5) schon für Rang-1-Operatoren K = φhψ, ·i. Mit
der Bezeichnung fK,ε (x) := hJε,x , KJε,x i gilt nämlich
kfK,ε − φψk1 = kJε ∗ φJε ∗ ψ − φψk1
≤ k(Jε ∗ φ − φ)ψk1 + kJε ∗ φ(Jε ∗ ψ − ψ)k1
≤ kJε ∗ φ − φk2 kψk2 + kJε ∗ φk2 kJε ∗ ψ − ψk2
(3.2.6)
ε→0
−−−→ 0.
Für beliebiges K =
P
j≥1 sj ϕj hφj , ·i
gilt mithilfe von
kJε ∗ ϕk2 ≤ kJε k1 kϕk2 = kϕk2 ,
und (*)
kfK,ε k1 = k
X
sj Jε ∗ ϕj Jε ∗ φj k1 ≤
X
sj kJε ∗ ϕj k2 kJε ∗ φj k2 ≤
j≥1
j≥1
X
sj
j≥1
= tr(|K|).
Dies stellt die Konvergenz von (3.2.5) sicher und zeigt auch schon die Eigenschaft (2). Ebenso ist dadurch (3.2.4) durch (3.2.6) gezeigt. Es verbleibt
die Eigenschaft (1) zu überprüfen:
Z
d
ρK (x) d x =
Rd
X
j≥1
=
X
j≥1
28
Z
sj
ϕj (x)φj (x) dd x
Rd
sj hφj , ϕj i =
X
hϕj , Kϕj i = tr(K).
j≥1
3.2 Hilbert-Schmidt-Operatoren
Satz 3.26
Seien f, g : Rd → C messbar und Mf , Mg die zugehörigen Multiplikationsoperatoren. Definiere
f (i∇)g := F −1 Mf FMg ,
f g(i∇) := Mf F −1 Mg F,
wobei F : L2 (Rd ) → L2 (Rd ) die Fourier-Transformation ist.
Dann gilt
(1) f (i∇)g, f g(i∇) ∈ I2 L2 (Rd ) , falls f, g ∈ L2 (Rd ),
(2) f (i∇)g, f g(i∇) ∈ K L2 (Rd ) , falls
d
a) f, g ∈ L∞
∞ (R ),
d
2
d
∞
d
b) f ∈ L∞
∞ (R ) und g ∈ L (R ) ∩ L (R ),
d
2
d
∞
d
c) f ∈ L2 (Rd ) + L∞
∞ (R ) und g ∈ L (R ) ∩ L (R ),
wobei
d
∞
d L∞
∞ (R ) = ψ ∈ L (R ) lim kψχRd \BR (0) k∞ = 0 .
R→∞
Beweis
Für f, g ∈ L2 (Rd ) sind die Integralkerne von f (i∇)g und f g(i∇) gegeben
durch
Z
1
(f (i∇)g)(x, y) =
e−i(x−y)·p f (p)g(y) d3 p
(2π)d Rd
1
=
fˇ(x − y)g(y) ∈ L2 (Rd × Rd ),
(2π)d/2
1
(f g(i∇))(x, y) =
f (x)ǧ(x − y) ∈ L2 (Rd × Rd ).
(2π)d/2
Also ist f (i∇)g, f g(i∇) ∈ I2 L2 (Rd ) mit kf (i∇)gk2 = kf g(i∇)k2 =
1
kf kkgk.
(2π)d/2
d
Falls f, g ∈ L∞
∞ (R ), approximiere f und g durch fn = χBn (0) f und
gn = χBn (0) g. Der Operator fn (i∇)gn konvergiert dann in Norm gegen
29
Kapitel 3 Kompakte Operatoren
f (i∇)g:
kf (i∇)g − fn (i∇), gn k ≤ kf (i∇)g − fn (i∇)gk + kfn (i∇)g − fn (i∇)gn k
≤ kMf − Mfn kkMg k + kMfn kkMg − Mgn k
n→∞
≤ kf − fn k∞ kgk∞ + kf k∞ kg − gn k∞ −−−−→ 0.
d
2
d
∞
d
Falls f ∈ L∞
∞ (R ) und g ∈ L (R ) ∩ L (R ), wende die selbe Approximation an mit gn = g. Genau gleich für f g(i∇).
d
2
d
∞
d
Falls f ∈ L2 (Rd ) + L∞
∞ (R ) und g ∈ L (R ) ∩ L (R ), dann ist f =
d
2
d
∞
f1 + f2 mit f1 ∈ L (R ) und f2 = L∞ (R ). Dann ist
f (i∇)g = F −1 Mf FMg = F −1 M(f1 +f2 ) FMg = F −1 (Mf1 + Mf2 )FMg
= f1 (i∇)g + f2 (i∇)g.
die Summe von zwei kompakten Operatoren.
Beispiel 3.27
1
d = 3, V (x) = |x|
. Dann ist
K=V
1
,
−∆ + z
z ∈ C \ R−
3
kompakt, da K = V W (i∇) mit V ∈ L2 (R3 ) + L∞
∞ (R ) und W (p) =
2
3
∞
3
W ∈ L (R ) ∩ L (R ).
1
p2 +z ,
Solche Ausdrücke werden wichtig, wenn das Spektrum von SchrödingerOperatoren −∆ + V untersucht wird. Zum einen
Bemerkung 3.28
Mit Hilfe der Hardy-Littlewood-Sobolev-Ungleichung (siehe [LL01, Abschnitt 4.3])
Z
1 1 λ
f (x)g(y) d d d
x
d
y
+ + = 2,
≤ C(n, λ, p)kf kp khkq ,
d d kx − ykλ
p
q
n
R ×R
kann gezeigt werden, dass
V 1/2
1
|V |1/2 ∈ I2 (L2 (R3 )),
p2
falls V ∈ L3/2 (R3 ). Hier steht p für p = i∇, d.h. 1/p2 = F −1 p12 F ist der
1
1
Operator mit Integralkern 4π
|x−y| .
30
Kapitel 4
Quantenmechanik
4.1 Formulierungen der nicht-relativistischen
Quantenmechanik
Es gibt zwei scheinbar verschiedene Ansätze für die Formulierung der nichtrelativistischen Quantenmechanik. Zum einen die Born’sche statistische
Interpretation, die im Prinzip auf jedes physikalisches System von Teilchen
angewendet werden kann, zum anderen die axiomatische Formulierung, die
bevorzugt in vielen Lehrbüchern verwendet wird.
4.1.1 Born’sche statistische Interpretation
Ein Quantensystem von N nicht-relativistischen Teilchen im R3 wird durch
eine Cd -wertige Funktion ψ ∈ L2 (R3N , Cd ) auf dem Konfigurationsraum
R3N beschrieben mit kψkL2 = 1, wobei d vom Spin der Teilchen abhängt.
Born’sche Regel Die Wahrscheinlichkeit, die Konfiguration X ∈ R3N
von einem N -Teilchen-System, welches durch die Wellenfunktion ψ beschrieben wird in einem Gebiet Λ ⊆ R3N zu finden ist gegeben durch
Z
Pψ (X ∈ Λ) =
kψ(x)k2Cd dx.
Λ
Die Zeit-Evolution des Zustandes ψ ist gegeben durch die SchrödingerGleichung
d
i ψ(t) = Hψ(t),
dt
wobei H ein zum System gehörender selbst-adjungierter Operator ist, genannt Hamilton-Operator.
31
Kapitel 4 Quantenmechanik
4.2 Axiomatische Formulierung
(1) Die Zustände im System Σ sind gegeben durch Einheits-Strahlen
[ψ] := {zψ|z ∈ C, kzψk = 1} in einem separablen Hilbert-Raum
HΣ , mit Skalarprodukt h·, ·i und induzierter Norm k · k. Meistens
wird ein Zustand [ψ] durch ein ψ ∈ [ψ] mit kψk = 1 repräsentiert.
(2) Zu einer Observablen A gehört ein selbst-adjungierter Operator
(D(TA ), TA ) auf HΣ .
(3) Die Messungen einer Observablen A ergeben immer Werte aus dem
Spektrum σ(TA ) des Operators TA als Resultat.
(4) Falls das System im Zustand ψ ist, so ist die Wahrscheinlichkeit
P(A ∈ S|ψ), ein Messergebnis a ∈ S ⊆ R für die Observable A mit
zugehörigem Operator TA zu erhalten, gegeben durch
Z
P(A ∈ S|ψ) = hψ, dEλ ψi,
S
R
gegeben, wobei TA = σ(TA ) λ dEλ die Spektralzerlegung von TA ist.
Der Erwartungsert für Messungen der Observablen A ist
E(A) = hψ, TA ψi.
(5) Kollaps der Wellenfunktion: Wenn eine Messung der Observablen A
im System im Zustand ψ den Messwert a ∈ σp (TA ) ergibt, dann ist
der Zustand direkt danach
ψc =
Pa ψ
,
kPa ψk
wobei Pa der orthogonale Proejktor auf den Eigenraum zu a ist.
(6) Die Zeitevolution eines Zustandes psi ist bestimmt durch einen
selbst-adjungierten Operator (D(H), H) durch die SchrödingerGleichung
d
(4.2.1)
i ψ(t) = Hψ(t).
dt
32
4.2 Axiomatische Formulierung
(7) Korrespondenz-Prinzip: Sei A : R6N → R, (q, p) 7→ A(q, p) eine
klassische Observable. Die zugehörige quantenmechanische Obervable wird dann durch den Operator
TA = A(q, −i~∇q )
auf HΣ = L2 (R3N , Cd ) beschrieben.
Bemerkung 4.1 (1) Die Axiome sind nicht als Axiome im mathematischen Sinne zu verstehen. Zum einen sind die Begriffe physikalische
Observable und Messung nicht klar definiert, zum anderen ist der
Kollaps der Wellenfunktion (Axiom (5)) nicht kompatibel mit der
Zeitevolution (Axiom (6)).
(2) Es gibt Versuche, die Axione aus der Bornschen Regel herzuleiten.
Siehe zum Beispiel [DT09].
Im Folgenden wird Korrespondenz-Prinzip keine Rolle spielen. Ebenso
werden vorerst nur Gleichgewichtszustände untersucht, bei denen wir uns
nicht um die Zeitevolution kümmern müssen. Trotzdem sei hier noch ein
wichtiges Theorem im Zusammenhang mit der Zeitevolution erwähnt:
33
Kapitel 4 Quantenmechanik
Theorem 4.2 (Stone’s Theorem)
Sei H separabel
(1) Sei (D(H), H) selbst-adjungiert auf H. Dann existiert eine stark stetige, unitäre, 1-parametrige Gruppe1
t 7→ U (t) ∈ L(H).
Darüber hinaus gilt
D(H) = {ψ ∈ H|
U (t)ψ − ψ
konvergiert für t → 0}
t
und U (t)ψ ist eine Lösung der Schrödinger-Gleichung (4.2.1).
(2) Sei t 7→ U (t) eine stark stetige, unitäre, 1-parametrige Gruppe. Definiere
U (t)ψ − ψ
konvergiert für t → 0}
t
U (t)ψ − ψ
Hψ := lim
,
ψ ∈ D(H).
t→0
t
D(H) := {ψ ∈ H|
Dann ist D(H) ⊆ H dicht, (D(H), H) ist selbst-adjungiert und es
gilt
U (t) = eitH ,
∀t ∈ R.
Bemerkung 4.3
Durch den folgenden Satz kann in (2) die Bedingung der starken Stetigkeit
abgeschwächt werden:
Satz 4.4 (von Neumann)
Sei H separabel, t 7→ U (t) ∈ L(H) eine unitäre, 1-parametrige Gruppe.
Dann ist U stark stetig ⇔ t 7→ hU (t)ψ, φi messbar ∀ψ, φ ∈ H.
34
4.3 Vielteilchen-Systeme
4.3 Vielteilchen-Systeme
Dieser Abschnitt befasst sich mit speziellen Hilbert-Räumen, die Systeme
mit variabler oder sogar unbestimmter Teilchenzahl beschreiben. Ausserdem wird dadurch die Erklärung der Phänomene im Zusammenhang mit
der so genannten Verschränkung ermöglicht. Ein grosser Teil des folgenden
Materials stammt aus [BR02].
Ausgangspunkt ist ein Hilbert-Raum H, welcher 1-Teilchen-Zustände
beschreibt. Der zugehörige Hilbert-Raum für Zustände von n (unterscheidbaren) Teilchen wird dann definiert als
n
O
H(n) :=
H.
Um Systeme mit unbestimmter Teilchenzahl zu beschreiben, führen wir
den so genannten Fock-Raum ein:
F(H) :=
∞
M
H(n) ,
H(0) := C.
n=0
Vektoren in F(H) sind dann gegeben durch
ψ = (ψ (0) , ψ (1) , . . . ),
(4.3.1)
wobei ψ (n) ∈ H(n) . Umgekehrt soll zu gegebenem Vektor ψF(H), der
Ausdruck ψ (n) das n-te Folgenglied in (4.3.1) bezeichnen. Den Vektor Ω =
(1, 0, 0, . . . ) ∈ F(H) bezeichnen wir als Vakuum(-Zustand).
Nn Die n-TeilchenSektoren H(n) erben mit Hilfe des Skalarprodukts auf
H die Struktur
einem Hilbert-Raum von H:
* n
+
n
n
O
O
Y
ψj ,
φj :=
hψj , φj i.
j=1
j=1
j=1
Es kann auch auf F− (H) übertragen werden:
hψ, φi :=
∞
X
hψ (n) , φ(n) i.
n=0
35
Kapitel 4 Quantenmechanik
Teilchenzahl-Operator Der Teilchenzahl-Operator (D(N ), N ) ist gegeben durch
D(N ) := {ψ ∈ F(H)|
X
n2 kψ (n) k2 < ∞},
n≥0
(n)
(N ψ)
= nψ
(n)
.
Ununterscheidbare Teilchen
wird zwischen den Bosonen und
gehörigen Zustände befinden sich
durch Projektionen P± aus F(H)
(n)
Unter den ununterscheidbaren Teilchen
den Fermionen unterschieden. Die zuin Unterräumen F± (H) von F(H), die
hervorgehen, d.h.
(n)
H± = P± H(n) ,
wobei
(n)
n
O
(n)
j=1
n
O
P+
P−
j=1
ψj =
n
1 X O
ψσ(j) ,
n!
j=1
(Bosonen)
σ∈Sn
ψj =
n
O
1 X
(−1)σ
ψσ(j)
n!
j=1
(Fermionen)
σ∈Sn
und
F± (H) = P± F(H),
wobei die Projektoren P± auf F(H) durch ihre Wirkung auf die n-TeilchenSektoren definiert sind:
(n)
(P± ψ)(n) = P± ψ (n) .
Erzeuger- und Vernichter-Operatoren Zu f ∈ H definieren wir den
Erzeugungs-Operator a∗ (f ) und den Vernichtungs-Operator a(f ) auf F(H)
durch
√
(4.3.2)
(a∗ (f )ψ)(0) = 0,
(a∗ (f )ψ)(n+1) := n + 1f ⊗ ψ (n) ,
36
4.3 Vielteilchen-Systeme
sowie a(f ) = (a∗ (f ))∗ , so dass a(f )Ω = 0 gilt und falls ψ (n) =
so
(a(f )ψ)(n−1) =
√
nhf, φ1 i
n
O
Nn
j=1
φn ,
φn .
j=2
Erweiterung durch Linearität macht a∗ (f ), a(f ) zu dicht definierte Operatoren mit
k(a(f )ψ)(n−1) k ≤
√
nkf k kψ (n) k,
k(a∗ (f )ψ)(n+1) k ≤
√
n + 1kf k kψ (n) k,
das heisst D(a# (f )) = D(N 1/2 ) und
ka# (f )ψk ≤ kf k k(N + 1)1/2 ψk.
Für die Bosonischen und Fermionischen Fock-Räume definieren wir
a± (f ) := a(f )P± ,
a∗± (f ) := P± a∗ (f )
Mit dieser Definition ergibt sich folgende nützliche Beziehung, welche
sich einfach per vollständiger Induktion beweisen lässt:
n
n
O
1 O ∗
√
a± (fj ) Ω = P±
fj .
n! j=1
j=1
(4.3.3)
Ebenfalls von zentraler Bedeutung sind die so genannten kanonischen
(Anti-) Kommutator - Regeln:
[a± (f ), a∗± (g)]± = hf, gi1,
[a∗± (f ), a∗± (g)]± = [a± (f ), a± (g)]± = 0,
wobei [·, ·]− = [·, ·] den Kommutator bezeichnet und [·, ·]+ = {·, ·} den
Antikommutator, d.h.
[A, B]± = AB ∓ BA.
37
Kapitel 4 Quantenmechanik
4.3.1 Zweite Quantisierung von Operatoren
Durch folgende Konstruktion kann jedem selbst-adjungierter Operator
(D(T ), T ) auf dem 1-Teilchen-Hilbert-Raum
H ein selbstadjungierter
Operator D( dΓ(T )), dΓ(T ) auf den Fock-Raum zugeordnet werden, so
dass dieser auf dem 1-Teilchen-Sektor mit T übereinstimmt. Zunächst
definieren wir auf dem n-Teilchen-Sektor
(D(T (n) ), T (n) ) := (
On
D(T ),
n
X
(⊗j−1 1) ⊗ T ⊗ (⊗n−j 1)).
j=1
Auf dem Fock-Raum wird dann definiert:
∞
X
(n)
(n)
D dΓ(T ) := {ψ ∈ F(H)|ψ ∈ D(T ),
kT (n) ψ (n) k < ∞}
n=1
und ( dΓ(T )ψ)(n) := T (n) ψ (n) , dΓ(T )Ω = 0. Dies lässt sich auch als Ausdruck von Erzeugern und Vernichtern in einer Orthonormalbasis {ϕj }j∈N
von H schreiben, allerdings nur als schwacher Limes:
dΓ(T )|H(n) = w-lim
N →∞
n
X
τl−1
l=1
N
X
1 ∗
a (T ϕj )a(ϕj )τl ,
n
j=1
wobei der Operator τj den j-ten Faktor in einem Tensorprodukt vor den
ersten stellt:
n
n
O
O
τj
φl := φj ⊗
φl .
(4.3.4)
l=1
l=1
l6=j
Auf den bosonischen und fermoionischen Fock-Räumen wird dΓ(T ) ersetzt
durch P± dΓ(T )|F± (H) . Da P± τj = (±1)j−1 P± und τj−1 = τj∗ , erhalten wir
folgenden Ausdruck
dΓ(T ) = w-lim
N →∞
N
X
a∗± (T ϕj )a± (ϕj ).
j=1
Beispiel 4.5
dΓ(1) = N.
38
(4.3.5)
4.3 Vielteilchen-Systeme
Zweiteilchen-Operatoren Die selbe Konstruktion lässt sich auch für
2-Teilchen-Wechselwirkungen V auf H⊗H vollziehen: Sei (D(V ), V ) selbstadjungiert auf H ⊗ H mit der Eigenschaft
V = τ2 V τ2
(Aktio = Reaktio)
Nn und D(V ) = D(v)⊗D(v) mit D(v) ⊆ H. Dann definiere
D(V (n) ) :=
D(v) und
n
n
O
X
O
V (n)
φl :=
τk τj (V φk ⊗ φj ) ⊗
φl ,
l=1
j,k=1
j<k
l=1
l6=j,k
P∞
sowie D( dΓ(V )) = {ψ ∈ F(H)|ψ (n) ∈ D(V (n) ), n=2 kV (n) ψ (n) k < ∞}
und
( dΓ(V )ψ)(n) = V (n) ψ (n) .
Wieder erhalten wir dΓ(V ) als schwachen Limes von Ausdrücken von Erzeugern und Vernichern
dΓ(V )|H(n) = w-lim
N →∞
×
N
X
hϕj ⊗ ϕk , V ϕl ⊗ ϕm i×
j,k,l,m=1
n
X
1
τr−1 τs−1
n(n
−
r,s=1
r<s
1)
a∗ (ϕj )a∗ (ϕk )a(ϕm )a(ϕl )τs τr .
Auf F± (H) ersetzen wir wieder dΓ(V ) durch P± dΓ(V )|F± (H) . Und wir
erhalten
dΓ(T ) = w-lim
N →∞
N
1 X
hϕj ⊗ ϕk , V ϕl ⊗ ϕm ia∗± (ϕj )a∗± (ϕk )a± (ϕm )a± (ϕl ).
2
j,k,l,m=1
(4.3.6)
Unitäre Operatoren Falls U ∈ L(H) unitär ist, so definieren wir
Γ(U ) ∈ L(F(H)) durch
On
U (n) :=
U,
(Γ(U )ψ)(n) := U (n) ψ (n) .
39
Kapitel 4 Quantenmechanik
4.3.2 Der fermionische Fock-Raum
Da wir im Folgenden nur noch am fermionischen Fock-Raum interessiert
sein werden, folgen hier ein paar spezielle Eigenschaften.
Satz 4.6
(1) ka− (φ)k = ka∗− (φ)k = kφk für alle φ ∈ H. Somit sind a− (φ)k,
ka∗− (φ) beschränkt.
(2) Für jede Orthonormalbasis {ϕj }j∈N von H ist {ϕJ }
J⊂N
|J|<∞
thonormalbasis von F− (H), mit
Y
ϕJ =
a∗− (ϕj )Ω,
eine Or-
(4.3.7)
j∈J
wobei das Produkt in aufsteigender Reihenfolge über j genommen
wird.
Beweis
(1) Wir schreiben
ka− (φ)k2 =
sup
hψ, a∗− (φ)a− (φ)ψi
ψ∈F− (H)
kψk=1
= kφk2 +
sup
−hψ, a− (φ)a∗− (φ)ψi.
ψ∈F− (H)
kψk=1
φ
, 0, . . . )
Das Supremum auf der rechten Seite wird bei ψ = (0, kφk
angenommen und ist 0. Der gleiche Trick funktioniert für a− (φ),
wobei hier das Supremum bei ψ = Ω angenommen wird.
(2) Folgt aus (4.3.3).
40
4.3 Vielteilchen-Systeme
4.3.3 Bogoliubov-Transformationen
Definition 4.7
Sei φ 7→ φ eine Konjugation auf H, d.h. eine anti-unitäre Involution. Eine Bogoliubov-Transformation auf F± (H) ist ein unitärer Operator U ∈
L(F± (H)), so dass u, v ∈ L(H) existieren mit der Eigenschaft
U ∗ a∗± (φ)U = a∗± (uφ) + a± (vf ).
(4.3.8)
Die Gleichung (4.3.8) liefert natürlich auch die Transformierte des Vernichters:
U ∗ a± (φ)U = a± (uφ) + a∗± (vf ).
Da eine unitr̈e Transformation die kanonischen (Anti-)Kommutator-Regeln
invariant lässt, d.h.
#
∗ #
∗ #
[a#
± (φ), a± (ψ)]± = [U a± (φ)U, U a± (ψ)U ]± ,
muss die Matrix
W :=
v
w
w
v
∈ L(H ⊕ H)
folgende Eigenschaft erfüllen:
1 0
1
W∗
W =
0 ±1
0
0
±1
.
(4.3.9)
Dabei ist für einen beliebigen Operator T die Konjugierte T definiert durch
T ψ := T ψ.
Beispiel 4.8
Für eine unitäre Abbildung U ∈ H, ist Γ(U ) ∈ F(H) eine BogoliubovTransformaion mit u = U und v = 0.
Bemerkung 4.9 (1) Definition 4.7 ist abhängig von der Wahl der Konjugation φ 7→ φ. ändert sich die Konjugation, so ändert sich auch der
Operator v, nicht aber der anti-lineare Operator φ 7→ vφ.
(2) Die Wahl einer Konjugation ist äquivalent mit der Wahl einer Orthonormalbasis. Dies wird im nächsten Lemma ersichtlich.
41
Kapitel 4 Quantenmechanik
Lemma 4.10
Sei C eine Konjugation auf H. Dann existiert eine Orthonormalbasis
{ϕj }j∈N , so dass
C = Cϕ ,
wobei Cϕ gegeben ist durch
Cϕ φ =
X
hϕj , φiϕj .
j∈N
Beweis
Wähle eine beliebige Orthonormalbasis {χj }j∈N mit zugehöriger Konjugation Cχ . Da C und Cχ beides Konjugationen sind, ist U = CCχ unitär.
Weiter hat U die Eigenschaft
Cχ U Cχ = Cχ CCχ Cχ = Cχ C = U ∗ .
√
Betrachte nun W := U . Da die Wurzel W aus einer Potenzreihe in U
hervorgeht, erfüllt W ebenfalls
Cχ W Cχ = W ∗ ⇔ W Cχ = Cχ W ∗
C = U C χ = W 2 C χ = W Cχ W ∗ .
Dies zeigt, dass
C = Cϕ ,
für die Orthonormalbasis
ϕj = W χj .
Theorem 4.11
(aus [BLS94])
v w
∈ L(H ⊕ H) die Eigenschaft (4.3.9) erfüllt und
Falls W :=
w v
zusätzlich v ∈ I2 (H) gilt, so existiert eine Bogoliubov-Transformation U ,
mit U ∗ a∗± (φ)U = a∗± (uφ) + a± (vφ).
42
4.3 Vielteilchen-Systeme
4.3.4 Gemischte Zustände in der Quantenstatistik
In der Festkörperphysik haben wir es mit Teilchenzahlen der Grössenordnung 1023 zu tun. Das macht es schwierig den exakten Zustand des Systems
zu kennen. In der Quantenstatiustik ist jedoch zumindest eine Verteilung
in Form eines Wahrscheinlichkeitsmasses µ auf B1 (0) := {ψ ∈ H|kψk = 1}
bekannt. Die Wahrscheinlichkeit für so eine Verteilung für die Observable
A einen Wert λ ∈ S zu messen ist dann gegeben durch
Z
Z
P(λ ∈ S) =
hψ, 1|TA ∈S ψi dµ(ψ) = tr(
Pψ dµ(ψ) 1|TA ∈S ),
B1 (0)
B1 (0)
wobei Pψ := hψ, ·iψ. Definieren wir nun
Z
ρµ :=
Pψ dµ(ψ),
B1 (0)
So lässt sich P(λ ∈ S) schreiben als
P(λ ∈ S) = tr(ρµ 1|TA ∈S )
und der Erwartungswert ist gegeben durch
E(A) = tr(ρµ TA ).
Da µ ein Wahrscheinlichkeitsmass ist, muss ρµ positiv und Spurklasse
sein, sowie tr(ρµ ) = 1 haben:
Z
µ
hφ, ρ φi =
|hφ, ψi|2 dµ(ψ) ≥ 0
B1 (0)
und
tr(ρµ ) =
X
hϕj , ρµ ϕj i =
j∈N
Z
X
|hϕj , ψi|2 dµ(ψ) = 1.
{z }
B1 (0) j∈N |
kψk2 =1
Dies motiviert die folgende Definition:
Definition 4.12 (Gemischter Zustand)
Ein gemischter Zustand auf einem Hilbert-Raum H ist ein Element
ρ ∈ I1 (H),
ρ ≥ 0,
tr(ρ) = 1.
43
Kapitel 4 Quantenmechanik
Der Erwartungswert einer Observable A im Zustand ρ ist definiert durch
hTA iρ := E(A) := tr(ρTA ).
Reine Zustände ψ ∈ H werden durch ρψ := Pψ = hψ, ·iψ beschrieben.
Die Spektralzerlegung von ρ liefert folgende Darstellung:
X
ρ=
wk Pϕk ,
w1 ≥ w2 ≥ . . . ≥ 0,
k∈N
∞
X
wk = 1,
k=1
wobei {ϕk }k∈N ein Orthonormalsystem ist.
Entropie
Die Gibbs-Entropie eines Zustandes ρ ist Definiert als
S(ρ) := −kB tr(ρ ln(ρ))
X
= −kB
wn ln(wn ) ≥ 0.
n∈N
Der Ausdruck muss dabei nicht notwendigerweise endlich sein. Im Folgenden werden Einheiten verwendet, so dass die Boltzmann-Konstante kB = 1
wird. Die Entropie hat folgende Eigenschaften
• S(ρ) = 0 ⇔ ρ2 = ρ ⇔ ρ = Pψ ,
• S(ρ1 ⊗ ρ2 ) = S(ρ1 ) + S(ρ2 ),
• S(λρ1 + (1 − λ)ρ2 ) ≥ λS(ρ1 ) + (1 − λ)S(ρ2 ), λ ∈ [0, 1],
• S(λρ1 +(1−λ)ρ2 ) ≤ λS(ρ1 )+(1−λ)S(ρ2 )−λ ln(λ)−(1−λ) ln(1−λ),
λ ∈ [0, 1].
In der Thermodynoamik ist man an Gleichgewichtszuständen interessiert. Dies sind die Maximierer von S. Dazu werden spezielle Funktionale
definiert.
44
4.3 Vielteilchen-Systeme
Thermodynamische Potentiale
Kanonisches Potential Möchte man die Entropie maximieren unter
der Nebenbedingunng, dass die mittlere Energie fixiert ist, d.h. hHiρ = E
so wird das Funktional
1
S(ρ) − hHiρ
T
maximiert mit dem Lagrange-Multiplikator
so genannte kanonische Potential
1
T
. Alternativ kann man das
ΦK (ρ) := hHiρ − T S(ρ)
minimieren.
Grosskanonisches Potential Ist die Teilchenzahl nicht mehr fixiert,
ist der zugrundeliegende Hilbert-Raum ein Fock-Raum. In diesem Fall ist
man an einer fixen mittleren Teilchenzahl hN iρ = n interessiert. Zusätzlich
soll wieder die mittlere Energie fixiert sein, d.h. hHiρ = E. Es wird somit
das Funktional
1
µ
S(ρ) − hHiρ − hN iρ
T
T
maximiert mit den Lagrange-Multiplikatoren T1 und
man das so genannte grosskanonische Potential
µ
T.
Alternativ kann
ΦG (ρ) := hHiρ − µhN iρ − T S(ρ)
minimieren.
Gemischte Zustände auf dem Fock-Raum
Der folgende Abschnitt basiert zum Teil auf [BLS94].
1-Teilchen-Dichte-Matrix Sei ρ ∈ I1 (F(H)) und ψ 7→ ψ eine Konjugation auf H. Definiere Γ ∈ L(H ⊕ H) durch
h(φ1 , φ2 ), Γ(ψ1 , ψ2 )i = [a† (ψ1 ) + a(ψ2 )][a(φ1 ) + a† (φ2 )] ρ .
(4.3.10)
45
Kapitel 4 Quantenmechanik
Dies ist äquivalent mit
Γ=
γ
α∗
α
1−γ
,
wobei γ, α : H → H, definiert sind durch
hφ, γψi = ha† (ψ)a(φ)iρ
hφ, αψi = ha(ψ̄)a(φ)iρ .
(4.3.11)
Lemma 4.13
0 ≤ Γ ≤ 1.
Beweis
Sei (φ, ψ) ∈ H ⊕ H with kφk2 + kψk2 = 1. Dann
h(φ, ψ), Γ(φ, ψ)i = [a− (φ) + a∗− (ψ)]∗ [a− (φ) + a∗− (ψ)] ρ ≥ 0.
Zusätzlich gilt wegen den Antikommutator-Regeln für a− und a∗−
[a− (φ) + a∗− (ψ)]∗ [a− (φ) + a∗− (ψ)]
= kφk2 + kψk2 − [a− (φ) + a∗− (ψ)][a− (φ) + a∗− (ψ)]∗
und wir schliessen
h(φ, ψ), Γ(φ, ψ)i ≤ 1.
Lemma 4.14
Falls U ∈ L(F− (H)) eine Bogoliubov-Transformation ist mit
U a∗− (φ)U ∗ = a∗− (uφ) + a− (vφ).
∗
Dann ist Γ 1-Teilchen-Dichte-Matrix von ρ genau dann
wennW ΓW die
u v
1-Teilchen-Dichte-Matrix von U ∗ ρU ist, wobei W =
.
v u
Beweis
U (a∗− (φ) + a− (ψ))U ∗ = a∗− (uφ + vψ) + a− (vφ + uψ).
46
4.3 Vielteilchen-Systeme
Quasi-freie Zustände
Definition 4.15 (Quasi-freier Zustand)
Ein gemischter Zustand ρ heisst quasi-frei, falls folgendes Wick-Theorem
gilt:
ha1 a2 · · · a2n iρ =
X
(−1)σ haσ(1) aσ(2) iρ · · · haσ(2n−1) aσ(2n) iρ
(4.3.12)
0
σ∈Sn
ha1 a2 · · · a2n+1 iρ = 0,
wobei aj ∈ {a− (f ), a∗− (f )|f ∈ H} und Sn0 := {σ ∈ Sn |σ(1) < σ(3) < . . . <
σ(2n − 1), σ(2j − 1) < σ(2j), 1 ≤ j ≤ n/2} ⊂ Sn .
Bemerkung 4.16
Sei U ∈ L(F− (H)) eine Bogoliubov-Transformation. Dann ist ρ ∈
I1 (F− (H)) quasi-frei genau dann wenn auch U ∗ ρU quasi-frei ist, da
hAiU ∗ ρU = hU AU ∗ iρ .
Beide Seiten des Wick-Theorems sind multilinear in den Erzeugern und
Vernichtern. Somit bleibt es erhalten.
47
Kapitel 4 Quantenmechanik
γ α Theorem 4.17 (1) Sei Γ = α∗ 1−γ ∈ L(H⊕H) mit 0 ≤ Γ ≤ 1, tr(γ) <
∞, γ ∗ = γ, α∗ = −α. Dann existiert eine quasi-freier Zustand ρ mit
hN i : ρ < ∞, der Γ als 1-Teilchen-Dichte-Matrix hat.
(2) Sei ρ quasi-frei. Dann existiert eine Orthonormalbasis {ϕj }j∈N von
H und eine Bogoliubov-Transformation U ∈ L(F− (H)), sowie I, J ⊂
N, I ∩ J = ∅, qi ∈ R, i ∈ I, so dass
U ∗ ρU = ρJ,Q ,
wobei
1
PIJ eQ ,
trF (PIJ eQ )
ρJ,Q =
Q=
X
qi a∗− (ϕi )a− (ϕi )
i∈I
und wo PIJ der Projektor auf F(H) ist, der definiert ist durch
(
ϕK , J ⊆ K ⊆ I ∪ J
PIJ ϕK =
,
0,
sonst
d.h. PIJ =
P
J⊆K⊆I∪J
ϕK hϕK , ·i.
Bemerkung 4.18
Der Projektor PIJ ist die rigorose Umsetzung der folgenden formalen
Schreibweise
PIJ eQ = lim eQ+sQ+ −sQ− ,
s→∞
wobei
Q+ =
X
j∈J
a∗− (ϕj )a− (ϕj ),
Q− =
X
a∗− (ϕj )a− (ϕj ).
j∈N\(I∪J)
Korollar 4.19
Sei ρ quasi-frei und hN iρ < ∞. Dann ist ρ ein reiner Zustand (ρ2 = ρ)
genau dann wenn Γ2 = Γ.
Den Beweis von Theorem 4.17 zerlegen wir in die folgenden Teilschritte
48
4.3 Vielteilchen-Systeme
Lemma 4.20
(
Q
δKL i∈I∩K eqi ,
(1) hϕK , PIJ e ϕL i =
0,
Y
(2) trF (PIJ eQ ) =
(1 + eqi ).
J ⊆K ⊆I ∪J
sonst.
Q
i∈I
(3) Für k, l ∈ N gilt
(
δkl hϕK , PIJ eQ ϕK i,
0,
k∈K
sonst.
1
Q
δkl 1+e−qk trF (PIJ e ),
Q ∗
Q
trF (PIJ e a− (ϕk )a− (ϕl )) = δkl trF (PIJ e ),
0,
k∈I
k∈J
sonst.
hϕK , PIJ e
Q
a∗− (ϕk )a− (ϕl )ϕK i
=
(4) Für k, l ∈ N gilt
(5) Sei K ⊂ N. Dann gilt
hY
i
a∗− (ϕk )a− (ϕk )
trF PIJ eQ
k∈K
=
Y
trF (PIJ eQ )
k∈K\J
0,
(6) trF (PIJ eQ Q) = trF (PIJ eQ )
1
,
1 + e−qk
K ⊆I ∪J
sonst.
X
i∈I
qi
.
1 + e−qi
Beweis
49
Kapitel 4 Quantenmechanik
(1)
Dies folgt aus
a∗− (ϕj )a− (ϕj )ϕJ
(3)
(
ϕJ , j ∈ J
=
.
0,
sonst
Wie (1).
Gemäss (3) ist klar, dass der Ausdruck Verschwindet, wenn K \
(I ∪ J) 6= ∅. Falls K ⊆ I ∪ J so rechnet man
hY
i
X
trF PIJ eQ
a∗− (ϕk )a− (ϕk ) =
hϕL , PIJ eQ ϕL i
(2), (5)
J∪K⊆L⊆I∪J
k∈K
X
=
Y
eql
J∪K⊆L⊆I∪J l∈L∩I
X
=
Y
eql
K\J⊆L⊆I l∈L
=
Y
e
qk
=
eqk
k∈K\J
=
Y
k∈K\J
eql
L⊆I\K l∈L
k∈K\J
Y
X Y
Y
(1 + eqi )
i∈I\K
Y
1
(1 + eqi ).
1 + e−qk
i∈I
Für K = ∅ folgt (2) und damit auch (5).
Es ist klar, dass der Ausdruck verschwindet, falls k 6= l. Falls k = l
folgt (4) aus (5) mit K = {k}.
(4)
(6)
Dies folgt sofort aus (4), wenn man die Definition
Q=
X
qi a∗− (ϕi )a− (ϕi )
i∈I
einsetzt und die Summe aus der Spur zieht.
50
4.3 Vielteilchen-Systeme
Lemma 4.21
Sei {ϕj }j∈N eine Orthonormalbasis von H und Q, PIJ , ρJ,Q wie in Theorem 4.17. Dann gilt
(1) ρJ,Q ist quasi-frei und hat eine diagonale 1-Teilchen-Dichte-Matrix
Γ:
1
1 + e−qi
1
1 − λi =
.
1 + eqi
Γ(ϕi , 0) = λi (ϕi , 0),
λi =
Γ(0, ϕi ) = (1 − λi )(0, ϕi ),
(2) Falls ein quasi-freier Zustand ρ eine diagonale 1-Teilchen-DichteMatrix Γ bezüglich {ϕj }j∈N hat, d.h.
ha∗− (ϕj )a− (ϕk )iρ = δjk λj ,
ha− (ϕj )a− (ϕk )iρ = 0,
so gilt ρ = ρJ,Q , wobei
J = {j ∈ N|λj = 1}
I = {j ∈ N|0 < λj < 1}
1
.
λj =
1 + e qj
Beweis
Wir überprüfen das Wick-Theorem (4.3.12). Für die Spur-Bildung benutzen wir wieder die Basis {ϕK } K⊂N . Es ist klar, dass nur die Er(1)
|K|<∞
wartungswerte ha1 a2 · · · a2n iρJ,Q nicht verschwinden, bei denen Erzeuger
und Vernichter des selben Vektors Paarweise auftreten. Insbesondere verschwinden alle Erwartungswerte mit ungerader Anzahl an Faktoren. Es
genügt daher, das Wick-Theorem für Ausdrücke der Form
Y
a∗− (ϕk )a− (ϕk ) ρ
J,Q
k∈K
51
Kapitel 4 Quantenmechanik
zu überprüfen. Dazu verwenden wir Lemma 4.20. Gemäss (5) gilt
Y
1
E
DY
, K ⊆I ∪J
−qk
∗
a− (ϕk )a− (ϕk )
= k∈K\J 1 + e
ρJ,Q
k∈K
0,
sonst.
Die einzelnen Faktoren auf der rechten Seite vom Wick-Theorem (4.3.12)
ergeben sich aus Lemma 4.20, (4)
ha∗− (ϕk )a− (ϕl )iρJ,Q
1
δkl 1+e−qk , k ∈ I
= δkl ,
k∈J
0,
sonst.
Dies zeigt einerseits, dass das Wick-Theorem erfüllt ist und andererseits,
dass die 1-Teilchen-Dichte-Matrix diagonal ist.
(2) Wir zeigen, dass die Matrix-Elemente von ρ und ρJ,Q übereinstimmen,
also
hϕK , ρϕL i = hϕK , ρJ,Q ϕL i
∀L, K ⊂ N, |L|, |K| < ∞.
Die Matrix-Elemente von ρJ,Q erhalten wir durch Lemma 4.20 (1):
(
hϕK , ρJ,Q ϕL i =
δKL
hQ
1
i∈K∩I 1+e−qi
ihQ
1
i∈I\K 1+eqi
0,
i
,
J ⊆K ⊆I ∪J
sonst.
Um die Matrix-Elemente von ρ auszurechnen, schreiben wir hϕK , ρϕL i =
hπKL iρ für πKL = ϕL hϕK , ·i. Wir drücken πKL durch Erzeuger und Vernichter aus und wenden das Wick-Theorem an:
p
ih Y
i Y
|K|! h Y ∗
a− (ϕk )
a− (ϕl )
(1 − a∗− (ϕj )a− (ϕj )).
πKL = p
|L|! k∈K
l∈L
j∈N\K
Dieser Ausdruck ist als schwacher Limes zu verstehen, da das letzte Produkt über eine unendliche Menge genommen wird, d.h.
(n)
πKL = w-lim πKL ,
n→∞
52
4.3 Vielteilchen-Systeme
wobei
p
i
ih Y
|K|! h Y ∗
= p
a− (ϕl )
a− (ϕk )
|L|! k∈K
l∈L
(n)
πKL
Y
(1 − a∗− (ϕj )a− (ϕj )).
j∈{1,...,n}\K
(n)
Da |hπKL iρ | mit n monoton fallend ist (ein zusätzlicher Faktor (1 −
a∗− (ϕj )a− (ϕj ) bewirkt entweder nichts oder ist 0) gilt per monotoner Konvergenz, dass
(n)
(n)
h lim πKL iρ = lim hπKL iρ .
n→∞
n→∞
Daher gilt für J ⊆ K ⊆ I ∪ J mit Hilfe des Wick-Theorems
Y
Y
hπKL iρ = δKL
ha∗− (ϕj )a− (ϕj ))iρ lim
(1 − ha∗− (ϕj )a− (ϕj )iρ )
n→∞
k∈(I∪J)∩({1,...,n}\K)
k∈K
= δKL
Y
λk
Y
(1 − λk )
k∈K k∈(I∪J)\K
= δKL
Y
k∈K
λk
Y
(1 − λk ).
k∈I\K
Für alle anderen Teilmengen K verschwinden die Matrix-Elemente und
somit stimmen sie mit denen von ρJ,Q überein.
Lemma 4.22
γ α Sei Γ = α∗ 1−γ ∈ L(H ⊕ H) mit 0 ≤ Γ ≤ 1, tr(γ) < ∞, γ ∗ = γ,
α∗ = −α. Dann existiert eine unitäre Abbildung W ∈ L(H ⊕ H) und eine
Orthonormalbasis {ϕj }j∈N von H, so dass
W ∗ ΓW (ϕi , 0) = λi (ϕi , 0)
W ∗ ΓW (0, ϕi ) = (1 − λi )(0, ϕi )
und
P
i∈N
λi < ∞, W = ( uv uv ), wobei v ∈ I2 (H).
Beweis
Da tr(γ) < ∞ folgt, dass
tr(Γ(1 − Γ)) = tr
γ(1−γ)−αα∗
−γα+αγ
−α∗ γ+γα∗ γ(1−γ)−αα∗
< ∞,
53
Kapitel 4 Quantenmechanik
da 0 ≤ Γ ≤ 1 und somit auch 0 ≤ Γ(1 − Γ) ≤ 1 und αα∗ ≤ γ(1 − γ). Das
bedeutet, dass Γ(1−Γ) selbst-adjungiert und Spurklasse ist und daher eine
Orthonormalbasis {fj }j∈N von H ⊕ H existiert, so dass
X
Γ(1 − Γ) =
µj fj hfj , ·i.
j∈N
Man stellt darüber hinaus fest, dass falls f eine Eigenvektor von Γ(1 − Γ)
zum Eigenwert µ ist, dass dann auchΓf ein Eigenvektor von Γ(1 − Γ) zum
selben Eigenwert ist. Dadurch gilt
Γ2 f = (Γ − (1 − Γ)Γ)f = Γf − µf
und Γ lässt den höchstens 2-dimensionalen Vektorraum span{f, Γf } invariant. Man kann daher die Basis {fj }j∈N im Vornherein so wählen, dass sie
auch Γ diagonalisiert.
Nun nutzen wir eine spezielle Eigenschaft von Γ =
γ α ∗
∗
aus.
Wegen
α
= −α, gilt mit der Notation X(ψ, χ) := (χ, ψ),
α 1−γ
dass
XΓX = 1 − Γ.
Diese Eigenschaft hat zur Folge, dass für jeden Eigenvektor f von Γ zum
Eigenwert µ, der Vektor Xf ein Eigenvektor von Γ zum Eigenwert 1−µ ist.
Wir können also die Basis {fj }j∈N schreiben als {fj }j∈N = {gj , Xgj }j∈N ,
wobei die Vektoren gj die Eigenvektoren zu Eigenwerten ≤ 12 sind. Wähle
eine Orthonormalbasis {ϕj }j∈N von N mit der Eigenschaft, dass ϕj = ϕj
(dies ist möglich nach Lemma 4.10). Definiere die unitäre Abbildung W ∈
L(H ⊕ H) durch
W (ϕj , 0) := gj ,
W (0, ϕj ) := Xgj .
Dann gilt automatisch dass, [W, X] = 0 ⇒ W = ( uv uv ), sowie
W ∗ ΓW (ϕi , 0) = λi (ϕi , 0)
W ∗ ΓW (0, ϕi ) = (1 − λi )(0, ϕi ).
P
P
Da 0 ≤ λi ≤ 21 folgt ∞ > tr(Γ(1 − Γ)) = 2 i∈N λi (1 − λ1 ) ≥ i∈N λi .
Es verbleibt zu zeigen, dass v ∈ I2 (H). Um das zu sehen, betrachte den
oberen linken Eintrag von W ∗ ΓW .
∗
u γu + v ∗ αu + u∗ αv + v ∗ (1 − γ)v ∗
W ∗ ΓW =
.
∗
∗
54
4.3 Vielteilchen-Systeme
Da
P
i∈N
< ∞ ist somit auch
∞ > tr(u∗ γu + v ∗ αu + u∗ αv + v ∗ (1 − γ)v)
= tr(uu∗ γ) +
| {z }
≥− tr(γ)
tr(v ∗ αu + u∗ αv)
|
{z
}
√ ∗
∗ ∗
≥−2
− tr(vv ∗ γ) + tr(v ∗ v)
| {z }
tr(v v) tr(uu α α)
≥− tr(γ)
p
p
≥ −2 tr(γ) − 2 tr(v ∗ v) tr(α∗ α) + tr(v ∗ v).
| {z }
√
≤
tr(γ)
Wir schliessen
tr(v ∗ v) − 2
p
p
tr(v ∗ v) tr(α∗ α) < ∞
| {z }
√
≤
tr(γ)
und es muss auch gelten, dass tr(v ∗ v) < ∞.
Beweis von Theorem 4.17
Mit Lemma 4.22 kann Γ per W = ( uv uv ) diagonalisiert werden. Nach
Theorem 4.11 existiert eine zugehörige Bogoliubov-Transformation U . Gemäss Lemma 4.14 hat U ∗ ρJ,Q U die 1-Teilchen-Dichte-Matrix Γ.
(1)
Diagonalisiere die 1-Teilchen-Dichte-Matrix Γ von ρ per W = ( uv uv ).
Dann hat U ∗ ρU W ∗ ΓW als 1-Teilchen-Dichte-Matrix und es muss nach
Lemma 4.21, (2) gelten, dass U ∗ ρU = ρJ,Q .
(2)
Satz 4.23
Falls ρ ein quasi-freier Zustand mit 1-Teilchen-Dichte-Matrix Γ ist, so gilt
S(ρ) = − trF (ρ ln(ρ)) = − trH⊕H (Γ ln(Γ)).
Beweis
Wir können mit Hilfe von Theorem 4.17 ohne Beschränkung der Allgemeinheit annehmen, dass ρ = ρJ,Q und dass Γ diagonal ist bezüglich
55
Kapitel 4 Quantenmechanik
{ϕK }
K⊂N ,
|K|<∞
da S(ρ) und − trH⊕H (Γ ln(Γ)) invariant unter unitären Trans-
formationen sind. Simples Ausrechnen liefert
−S(ρ) =
=
trF
trF
1
trF PIJ eQ ln(PIJ eQ ) − ln trF (PIJ eQ )
PIJ eQ
1
trF PIJ eQ Q − ln trF (PIJ eQ ) .
PIJ eQ
Setzt man für die Spuren die in Lemma 4.20, (2) und (6) gefundenen
Ausdrücke ein, so erhält man
X
eqi
qi
q
−
ln
1
+
e
i
q
1+e i
i∈I
i∈I
X
λi X
=
λi ln
+
ln(1 − λi )
1 − λi
i∈I
i∈I
X
X
=
λi ln(λi ) +
(1 − λi ) ln(1 − λi ),
−S(ρ) =
X
i∈I
i∈I
wobei λi = ha∗− (ϕj )a(ϕj )iρ = h(ϕi , 0), Γ(ϕi , 0)i. Daraus ergibt sich
−S(ρ) = trH⊕H Γ ln(Γ) ,
was den Beweis beendet.
56
4.3 Vielteilchen-Systeme
Satz 4.24
Sei ρ quasi-frei, mit 1-Teilchen-Dichtematrix Γ, (D(T ), T ) ein selbstadjungierter Operator auf H und (D(V ), V ) ein 2-Teilchen-Operator (d.h.
selbst-adjungiert auf H ⊗ H mit τ2 V τ2 = V ). Dann gilt
h dΓ(T )iρ = trH (T γ),
1
h dΓ(V )iρ = (hψα , V ψα i − trH⊗H (V γ ⊗ γτ2 ) + trH⊗H (V γ ⊗ γ)) ,
2
wobei
ψα :=
X
(αϕj ) ⊗ ϕj ,
j∈N
für eine beliebige Orthonormalbasis {ϕj }j∈N von H. Falls V die Eigenschaft besitzt, dass
hφ1 ⊗ ψ1 , V φ2 ⊗ ψ2 i = hφ1 ⊗ ψ2 , V φ2 ⊗ ψ1 i, ∀φ1 , φ2 , ψ1 , ψ2 ∈ H,
So gilt
hψα , V ψα i = trH⊗H (V α ⊗ α∗ τ2 ).
Beweis
Sei {ϕj }j∈N eine Orthonormalbasis von H. Mit (4.3.5) erhalten wir
h dΓ(T )iρ =
X
hϕj , T ϕk iha∗− (ϕj )a− (ϕk )iρ
j,k∈N
=
X
hϕj , T ϕk ihϕk , γϕj i = trH (T γ).
j,k∈N
Für den 2-Teilchen-Operator V ziehen wir (4.3.6) heran und erhalten mit
57
Kapitel 4 Quantenmechanik
Hilfe des Wick-Theorems
1 X
h dΓ(V )iρ =
hϕj ⊗ ϕk , V ϕl ⊗ ϕm iha∗− (ϕj )a∗− (ϕk )a− (ϕm )a− (ϕl )iρ
2
j,k,l,m∈N
1
2
=
X
hϕj ⊗ ϕk , V ϕl ⊗ ϕm i×
j,k,l,m∈N
a∗− (ϕj )a∗− (ϕk ) ρ a− (ϕl )a− (ϕm ) ρ
− a∗− (ϕj )a− (ϕl ) ρ a∗− (ϕk )a− (ϕm ) ρ
+ a∗− (ϕj )a− (ϕm ) ρ a∗− (ϕk )a− (ϕl ) ρ .
×
Die einzelnen Summanden lassen sich per Definition von α und γ schreiben
als
ha∗− (ϕj )a∗− (ϕk )iρ ha− (ϕl )a− (ϕm )iρ = hαϕk , ϕj ihϕl , αϕm i,
ha∗− (ϕj )a− (ϕl )iρ ha∗− (ϕk )a− (ϕm )iρ = hϕm , γϕj ihϕl , γϕk i
ha∗− (ϕj )a− (ϕm )iρ ha∗− (ϕk )a− (ϕl )iρ = hϕl , γϕj ihϕm , γϕk i.
Daraus folgt, dass
X
hϕj ⊗ ϕk , V ϕl ⊗ ϕm iha∗− (ϕj )a∗− (ϕk )iρ ha− (ϕl )a− (ϕm )iρ
j,k,l,m∈N
=
X
h(αϕk ⊗ ϕk , V (αϕm ⊗ ϕm i = hψα , ψα i,
k,m∈N
X
hϕj ⊗ ϕk , V ϕl ⊗ ϕm iha∗− (ϕj )a− (ϕl )iρ ha∗− (ϕk )a− (ϕm )iρ
j,k,l,m∈N
=
X
hϕj ⊗ ϕk , V (γϕk ) ⊗ (γϕj )i = trH⊗H (V γ ⊗ γτ2 ),
j,k∈N
X
hϕj ⊗ ϕk , V ϕl ⊗ ϕm iha∗− (ϕj )a− (ϕm )iρ ha∗− (ϕk )a− (ϕl )iρ
j,k,l,m∈N
=
X
hϕj ⊗ ϕk , V (γϕj ) ⊗ (γϕk )i = trH⊗H (V γ ⊗ γ).
j,k∈N
Falls V die Eigenschaft besitzt, dass
hφ1 ⊗ ψ1 , V φ2 ⊗ ψ2 i = hφ1 ⊗ ψ2 , V φ2 ⊗ ψ1 i, ∀φ1 , φ2 , ψ1 , ψ2 ∈ H,
58
4.3 Vielteilchen-Systeme
So gilt
hψα , V ψα i = trH⊗H (α∗ ⊗ 1V α ⊗ 1τ2 ) = trH⊗H (V α ⊗ 1τ2 α∗ ⊗ 1)
= trH⊗H (V α ⊗ α∗ τ2 ).
59
Kapitel 4 Quantenmechanik
60
Kapitel 5
Das BCS-Funktional
5.1 Herleitung
Wir betrachten ein quantenmechanisches System Σ von Spin-1/2-Fermionen unbestimmter Anzahl in einer Box Λ = [− L2 , L2 ]3 ⊂ R3 mit periodischen Randbedingungen. Eine Wechselwirkung der Fermionen untereinander sei gegeben durch ein Potential V ∈ L1 (λ). Auf das System wirke ein
externes elektromagnetisches Feld, bestimmt durch die Potentiale W (x)
und A(x).
Das BCS-Funktional resultiert aus dem zugehörige Grosskanonische Potential ΦG , eingeschränkt auf quasi-freie Zustände und Bildung des thermodynamischen Limes Λ → ∞.
Hilbert-Raum Der zu Σ gehörende Hilbert-Raum ist der Fock-Raum
der Spin- 12 -Fermionen in der Box Λ,
HΣ = F(H) mit H = L2per (Λ) ⊗ C2 ∼
= L2per (Λ) ⊕ L2per (Λ). Auf C2 sei die
Basis gegeben durch {e↑ , e↓ }. Die Vektoren in H(n) sind total antisymmetrische Wellenfunktionen
ψ(z1 , . . . , zn ),
zi = (xi , σi ) ∈ Λ × {↑, ↓}.
Hamiltonian Unsere Energie-Observable für das Gross-Kanonische Potential ist gegeben durch
H = dΓ(T + V + W ),
wobei, T = (−i∇ + A(x))2 die kinetische / magnetische Energie ist, W
der Multiplikations-Operator mit dem elektrischen Potential und V der
61
Kapitel 5 Das BCS-Funktional
Zweiteilchen-Operator gegeben durch
(V φ1 )(z1 , z2 ) := V (x1 − x2 )φ1 (z1 , z2 ).
Das Grosskanonische Potential
ΦG (ρ) = hHiρ − µhN iρ − T S(ρ)
ist damit vollständig definiert.
5.1.1 Schritt 1: Restriktion auf quasi-freie Zustände
Da N = dΓ(1), können wir Satz 4.24 auf die 1-Teilchen-Operatoren T , W
und 1, sowie den 2-Teilchen-Operator V anwenden.
Dies liefert
h dΓ(T + W − µ1)iρ = trH ((T + W − µ)γ)
und
hV iρ =
1
(hψα , V ψα i − trH⊗H (V γ ⊗ γτ2 ) + trH⊗H (V γ ⊗ γ)) .
2
Auf L2 (R3 ⊗ {↑, ↓}) lassen sich α und γ durch Integralkerne α(z1 , z2 ) und
γ(z1 , z2 ) ausdrücken. Der Ausdruck für hV iρ wird dadurch zu
Z
1 X
|α(x, σ, y, τ )|2 V (x − y) d3 x d3 y
hV iρ =
2
σ,τ ∈{↑,↓} Λ×Λ
Z
1 X
−
|γ(x, σ, y, τ )|2 V (y − x) d3 x d3 y
2
Λ×Λ
σ,τ ∈{↑,↓}
Z
1 X
+
γ(x, σ, x, σ)γ(y, τ, y, τ )V (x − y) d3 x d3 y.
2
Λ×Λ
σ,τ ∈{↑,↓}
Verwenden wir nun noch den Satz 4.23 für die Entropie S(ρ), so erhalten
wir einen Ausdruck für das Grosskanonische Potential, welcher auf die 1Teilchen-Dichte-Matrix Γ reduziert ist. Das BCS-Funktional wird daraus
62
5.1 Herleitung
durch Bildung des thermodynamischen Limes gewonnen:
FBCS (Γ) = lim trH ((−i∇ + A)2 − µ + W )γ − T S(Γ)
Λ→∞
Z
1 X
+
|α(x, σ, y, τ )|2 V (x − y) d3 x d3 y
2
σ,τ ∈{↑,↓} Λ×Λ
Z
1 X
−
|γ(x, σ, y, τ )|2 V (y − x) d3 x d3 y
2
σ,τ ∈{↑,↓} Λ×Λ
Z
1 X
+
γ(x, σ, x, σ)γ(y, τ, y, τ )V (x − y) d3 x d3 y.
2
Λ×Λ
σ,τ ∈{↑,↓}
(5.1.1)
5.1.2 Schritt 2: Einschränkung auf SU (2)-invariante
Zustände
Wir schreiben Vektoren ψ ∈ H = L2 (R3 ) ⊕ L2 (R3 ) ∼
= L2 (R3 ) ⊗ C2 als
ψ = (ψ↑ , ψ↓ ).
Zum Beispiel, für φ ∈ L2 (R3 ) ist der Vektor ψ = φ ⊗ e↑ ∈ H gegeben
durch ψ = (φ, 0). In anderen Worten fassen wir ψ als ein Element von
L2 (R3 , C2 ), so dass ψ(x) ∈ C2 . Rotationen im Spin-Raum werden auf
diese Art beschrieben durch eine Matrix S ∈ SU (2), welche auf H gemäss
(Sψ)(x) = Sψ(x)
wirkt. Auf dem Fock-Raum F(H) ist die Wirkung von S ∈ SU (2) gegeben
durch die Bogoliubov-Transformation US = Γ(S) ∈ L(F(H)), welche die
Erzeuger und Vernichter folgendermassen transformiert:
US a∗− (ψ)US∗ = a∗− (Sψ)
US a− (ψ)US∗ = a− (Sψ).
Ein Zustand ρ heisst invariant unter Spin-Rotationen oder kurz SU (2)invariant, falls
US ρUS∗ = ρ.
(5.1.2)
63
Kapitel 5 Das BCS-Funktional
Im folgenden werden wir FBCS auf SU (2)-invariante Zustände einschränken. Die Idee hinter dieser Approximation ist, dass wir für reine Zustände
ψ ∈ H, welche den Erwartungswert eines SU (2)-invarianten Hamiltonians
H minimieren, d.h. [H, US ] = 0, selber auch SU (2)-invariant sein muss,
d.h. US ψ = ψ. In unserem Fall ist H tatsächlich SU (2)-invariant, aber ΦG
enthält auch das ncht-lineare Entropie-Funktional S. Darum ist es apriori
nicht klar, ob der/die Minimierer von ΦG SU (2)-invariant sind und die
Einschränkung ist eine Näherung.
Für quasi-frei Zustände übersetzt sich die Bedingung der SU (2)-Invarianz zur folgenden Transformationsvorschrift für die Operatoren α, γ
(4.3.11), i.e.
γ 7→ S ∗ γS
α 7→ S ∗ αS.
Falls eine Matrix M ∈ C2×2 die Eigenschaft S ∗ M S = M für alle S ∈
SU (2) erfüllt, so ist M ein Vielfaches von 1. Daraus kann man eine analoge
Aussage für Matrizen, die S ∗ M S̄ = M erfüllen ableiten. Jedes
S ∈ SU (2)
z −w̄
lässt sich nämlich
für
z,
w
∈
C
darstellen
als
S
=
.
Daraus
folgt,
w
z̄
0 −i ∗
dass S̄ = 0i −i
S
.
Daher
ist
die
Eigenschaft
S
M
S̄
=
M
äquivalent
0
i 0
mit
0 −i
S ∗ M 0i −i
0 S =M i 0
muss ein Vielfaches von 1 sein, oder
und M 0i −i
0
M = λ 0i −i
0 .
Darum, müssen für einen quasi-freien, SU (2)-invarianten Zustand die
Operatoren γ, α folgende Form annehmen:
γ=γ
e⊗1
α=α
e⊗
0 −i
i 0
,
für passende, reduzierte Operatoren γ
e, α
e : L(R3 ) → L(R3 ), welche
γ
e∗ = γ
e,
erfüllen.
64
α
e∗ = α
e
5.1 Herleitung
Wir werden nun zeigen, dass das BCS-Funktional FBCS für SU (2)-invariant Zustände rein durch die reduzierte 1-Teilchen-Dichte-Matrix
γ
e
α
e
e=
Γ
α
e∗ 1 − γ
e
ausgedrückt werden kann. Um das zu sehen, führen wir die Notation (φ ⊗
v, ψ ⊗ v) = (φ, ψ) ⊗ v ein. In dieser kompakten Notation gilt
e ψ)] ⊗ v1
Γ[(φ, ψ) ⊗ v1 ] = [Γ(φ,
0 e
Γ(φ, ψ)
Γ[(φ, ψ) ⊗ v2 ] = [ 10 −1
] ⊗ v2 ,
1
und v2 = √12 −i
Eigenvektoren von
e ≤ 1 als Operator und
schliessen, dass 0 ≤ Γ
wobei v1 =
√1 1
2 i
1 0
0 −1
0 −i
i 0
sind. Wir
e ln(Γ)
e =: 2S(
e Γ).
e
S(Γ) = trH⊕H Γ ln(Γ) = 2 trL2 (R3 )⊕L2 (R3 ) Γ
Dadurch erhält das Grosskanonische Potential die Form
fG (Γ)
e := 1 ΦG (Γ) = trL2 (R3 ) ((−i∇ + A)2 + µ + W )e
e Γ)
e
Φ
γ − T S(
2Z
1
+
|e
α(x, y)|2 V (x − y) d3 x d3 y
2 R3 ×R3
Z
1
−
|e
γ (x, y)|2 V (y − x) d3 x d3 y
2 R3 ×R3
Z
+
γ
e(x, x)e
γ (y, y)V (x − y) d3 x d3 y.
R3 ×R3
(5.1.3)
Das Funktional
e =Φ
fG (Γ)
e
FBCS (Γ)
ist der Ausgangspunkt in vielen Arbeiten [BHS14b; HS13; Fra+08] (wobei
oft wieder die letzten beiden Terme, die direkte und die Austauschenergie,
vernachlässigt werden).
65
Kapitel 5 Das BCS-Funktional
5.1.3 Schritt 3: Einschränkung auf
translations-invariante Zustände
e
Wir nehmen als Ausgangspunkt das SU (2)-invariante Funktional FBCS (Γ)
von (5.1.3), aber mit endlichem Volumen Λ, d.h. noch vor dem Limes
e α
e lassen
Λ → ∞. Wir benutzen die reduzierten Grössen Γ,
e, γ
e und S,
aber “e” weg. Mit den selben Argumenten, wie bei der Einschränkung auf
SU (2)-invariante Zustände, nehmen wir jetzt eine weiter Approximation
vor.
Die Translation eines Zustandes ψ ∈ L2 (R3 ) ist gegeben durch
(Tδ ψ)(x) = ψ(x + δ).
2
Auf dem Fock-Raum F(L (R3 )), wird dies zu einer Bogoliubov transformation Uδ = Γ(Tδ ) fortgesetzt, die Erzeuger und Vernichter wie folgt transformiert: Uδ a# (ψ)Uδ∗ = a# (Tδ ψ). Translations-invariante Zustände ρ sind
wieder charakterisiert durch
hUδ AUδ∗ iρ = hAiρ .
Wieder gilt, [H, Uδ ] = 0, was die Einschränkung auf translations-invariante
Zustände motiviert. Für quasi-freie Zustände erhält die 1-Teilchen-DichteMatrix Γ die Eigenschaft
Γ(x, y) = Γ(x − δ, y − δ)
γ
e(x − y) α
e(x − y)
e − y) =
⇔ Γ(x, y) = Γ(x
.
α
e(y − x) 1 − γ
e(x − y)
Wie in der letzten Einschränkung, kann FBCS als Ausdruck in der ree − y) angegeben werden: Für die
duzierten 1-Teilchen-Dichte-Matrix Γ(x
eikx
√
sind die Operatoren γ, α diagonal. Es gilt
Orthonormalbasis ψk (x) =
|Λ|
nämlich
γψk = γ
b(k)ψk ,
Z
γ
b(k) =
Λ
γ
e(x)e−ikx d3 x,
αψk = α
b(k)ψk ,
Z
α
b(k) =
α
e(x)e−ikx d3 x.
Λ
Dadurch erhält die Entropie S die Form
X
b
b
S(Γ) = −
trC2 Γ(k)
ln(Γ(k))
,
2π
k∈ L Z3
66
5.1 Herleitung
für
b
Γ(p)
=
γ
b(p) α
b(p)
α
b(p) 1 − γ
b(−p)
b
0 ≤ Γ(p)
≤ 1, α
b(p) = α
b(−p).
,
Das Grosskanonische Potential pro Volumen (ohne externe elektromagnetische Felder) ist dann gegeben durch
1
1
ΦG (Γ) =
2|Λ|
|Λ|
X
(p2 + µ)b
γ (p) + T
2π
p∈ L Z3
1
|Λ|
X
b
b
trC2 Γ(k)
ln(Γ(k))
2π
k∈ L Z3
Z
1
|e
α(r)|2 V (r) d3 r
2 Λ
Z
Z
1
2
3
2
−
|e
γ (r)| V (r) d r + [e
γ (0)]
V (r) d3 r.
2 Λ
Λ
+
Im Limes Λ → R3 und mit der Definition α := (2π)3/2 α
e, γ := (2π)3/2 γ
e um
die Übliche Konvention der Fouriertransformation
Z
fb(p) = (2π)−3/2
f (x)e−ipx d3 x,
R3
zu berücksichtigen, erhalten wir
(2π)3
FBCS (Γ) := lim 3
ΦG (Γ)
Λ→R 2|Λ|
Z
Z
3
2
3
b ln(Γ(p))
b
=
(p + µ)b
γ (p) d p + T
trC2 Γ(p)
d p
3
3
R
R
(5.1.4)
Z
1
+
|α(r)|2 V (r) d3 r
2 R3
Z
Z
1
−
|γ(r)|2 V (r) d3 r + [γ(0)]2
V (r) d3 r.
2 R3
R3
Wieder kommt der erste Term von der kinetischen Energie. Die letzten beiden Terme werden wieder üblicherweise vernachlässigt. Der Zweite Term
Z
3
b ln(Γ(p))
b
trC2 Γ(p)
d p
R3
67
Kapitel 5 Das BCS-Funktional
ist die negative Entropie, welche minimal wird
R für α ≡ 0. Deswegen wirkt
sie der Paarungsenergie der Cooper-Paare 21 R3 |α(r)|2 V (r) d3 r entgegen,
welche FBCS absenken kann wenn α 6= 0.
Auf diese Art und Weise entsteht ein Mechanismus, der dafür sorgen
kann, dass bei sinkender Temperatur T , der Effekt der Paarungsenergie
den Effekt der Entropie übersteigt. In diesem Fall durchgeht das System
einen Phasenübergang.
Die Idee hinter der Interpretation von α als die Cooper-Paar-Wellenfunktion ist dass sich das System makroskopisch kohärent verhält, sobald
α 6= 0. Um das zu sehen, untersuchen wir die Korrelationsfunktion eines
Paares bei x und eines bei y, formal gegeben durch ha∗x,↑ a∗x,↓ ay,↓ ay,↑ iρ .
Falls ρ SU (2)-invariant ist, erfüllen die Operatoren γ und α
γ(x, σ, y, τ ) = δστ γ
e(x, y),
α(x, σ, y, τ ) = (1 − δστ )e
α(x, y),
für reduzierte Operatoren γ
e and α
e. In diesem Fall, ha∗x,↑ a∗x,↓ ay,↓ ay,↑ iρ =
2
|e
γ (x, y)| + α
e(x, x)e
α(y, y). Falls zusätzlich ρ translations-invariant ist,
γ
e(x, y) = γ
e(x + δ, y + δ) und γ
e(x, y) = γ
e(x + δ, y + δ), dann vereinfacht
sich der Ausdruck zu
|e
α(0, 0)|2 + |e
γ (x − y, 0)|2 .
Für weit entfernte x und y, konvergiert |e
γ (x − y, 0)|2 gegen 0, wogegen
2
|e
α(0, 0)| konstant bleibt. Dies zeigt, dass die Paare über weite Distanzen
korrelieren. Dies wird als long range order bezeichnet.
68
Kapitel 6
Das vereinfachte
translations-invariante BCS-Funktional
In diesem Kapitel behandeln wir das translations- und SU (2) invariante
BCS-Funktional. Der Einfachheit halber vernachlässigen wir die direkte
und die Austausch-Energie. In [BHS14c] wird die Situation untersucht,
wenn die beiden Energien berücksichtigt werden.
Als erstes überprüfen wir, ob und wann ein Minimierer vom BCS-Funktional
Z
Z
1
FT (Γ) =
(p2 + µ)b
γ (p) d3 p − T S(Γ) +
|α(r)|2 V (r) d3 r,
2
3
3
R
R
Z
(6.0.1)
3
S(Γ) = −
trC2 Γ(p) ln(Γ(p)) d p
R3
existiert. Dazu untersuchen wir den Fall α ≡ 0.
Der Fall α ≡ 0 Hier gilt
Z
S(Γ) = −
γ
b(p) ln(b
γ (p)) + (1 − γ
b(−p)) ln(1 − γ
b(−p)) d3 p
3
ZR
=−
s(b
γ (p)) d3 p,
R3
wobei s(x) = x ln(x) + (1 − x) ln(1 − x). Somit
Z
FT (Γ) =
(p2 + µ)b
γ (p) + T s(b
γ (p)) d3 p.
R3
69
Kapitel 6 Das vereinfachte translations-invariante BCS-Funktional
x
Punktweises Minimieren des Integranden ergibt (benutze s0 (x) = ln( 1−x
))
als Minimierer
1
γ
b0 (p) =
2
1 + exp( p T−µ )
und als Minimum
Z
FT (Γ) = −T
ln(1 + e−
p2 −µ
T
) d3 p.
(6.0.2)
R3
Satz 6.1 (Existenz von Minimierern)
Sei µ ∈ R, 0 ≤ T < ∞ und V ∈ L1 (R3 ) ∩ L3/2 (R3 ) reell-wertig. Dann ist
FT von unten beschränkt und nimmt sein Minimum Γ auf
γb∈L1 (R3 ,(1+p2 ) d3 p),
γ
b(p)
α
b(p)
2
0
≤
Γ
≤
1
D = Γ(p) =
C
α∈H 1 (R3 , d3 x),
α
b(p) 1 − γ
b(−p)
an.
Beweis (aus [Hai+08])
Wir zeigen zuerst, dass FT sowohl die L1 (R3 , (1 + p2 ) d3 p)-Norm von γ
b als
auch die H 1 (R3 , d3 x)-Norm von α dominiert. Daher wird jede minimierende Folge in diesen Normen beschränkt sein. Wir zerlegen das Funktional
gemäss
Z
1
FT (Γ) =
(p2 − µ)b
γ (p) d3 p − T S(Γ)
4 R3
Z
Z
1
1
2
3
+
p γ
b(p) d p +
|α(x)|2 V (x) d3 x
4 R3
2 R3
Z
1
+
(p2 + 1)b
γ (p) d3 p
4 R3
Z 3
+
p2 /4 − µ − 1/4 γ
b(p) d3 p.
4
3
R
Eine untere Schranke für die erste Gruppe kann aus dem Minimum (6.0.2)
durch die Substitution T → 4T gewonnen werden:
Z
Z
p2 −µ
1
C1 = inf
(p2 − µ)b
γ (p) d3 p − T S(Γ) = −T
ln(1 + e− 4T ) d3 p.
Γ∈D 4 R3
R3
70
6.0 Das translations-invariante Funktional
Für die zweite Gruppe verwenden wir, dass V ∈ L3/2 und damit V relativ beschränkt bezüglich −∆ (im Sinn von quadratischen Formen), d.h.
C2 = inf spec (p2 /4 + V ) ist endlich. Unter Verwendung von |b
α(p)|2 ≤ γ
b(p)
erhalten wir
Z
Z
Z
1
1
p2 γ
b(p) d3 p +
V (x)|α(x)|2 d3 x ≥ C2
γ
b(p) d3 p .
4 R3
2 R3
R3
Mithilfe von |b
α(p)|2 ≤ γ
b(p) ≤ 1 folgt
1
1
γ kL1 (R3 ,(1+p2 ) d3 p) ,
FT (Γ) ≥ −A + kαk2H 1 (R3 , d3 x) + kb
8
8
wobei
(6.0.3)
3
2
A = −C1 −
p /4 − µ − 1/4 + C2
d3 p
4
R3
−
Z
und wo [ · ]− = min{ · , 0} den negativen Anteil bezeichnet.
Um zu zeigen, dass ein Minimierer
existiert, wählen wir
von FT in D
γ
c
α
c
n (p)
n (p)
∈ D, mit der oberen
eine minimierende Folge Γn (p) = αc (p) 1−c
γ (−p)
n
n
Schranke FT (Γn ) ≤ 0. Wegen (6.0.3) muss gelten, dass kαn k2H 1 ≤ 8A und
wir finden eine Teilfolge die schwach gegen ein α
e ∈ H 1 konvergiert. Da
3/2
3
V ∈ L (R ) folgt
Z
Z
2 3
lim
V (x)|αn (x)| d x =
V (x)|e
α(x)|2 d3 x
n→∞
R3
R3
[LL01, Thm. 11.4].
Es vebleibt zu zeigen, dass der übrige Teil des Funktionals,
Z
FT0 (Γ) =
(p2 − µ)b
γ (p) d3 p − T S(Γ) ,
(6.0.4)
R3
schwach unterhalb stetig ist. Dieser Teil FT0 ist schon mal konvex in Γ und
seine Domäne D ist eine konvexe Menge. Zusätzlich wissen wir, dass αn *
α
e schwach in H 1 (R3 ). Da γ
bn uniform beschränkt in L1 (R3 ) ∩ L∞ (R3 ) ist,
e
finden wir eine Teilfolge, so dass γ
bn * γ
b schwach in Lp (R3 ) für ein 1 < p <
∞. Daher können wir Mazur’s Theorem [LL01, Theorem 2.13] anwenden,
um eine neue Folge als konvexe Kombinationen der alten zu konstruieren,
71
Kapitel 6 Das vereinfachte translations-invariante BCS-Funktional
e
die stark gegen (γ
b, α
e) in Lp (R3 ) × L2 (R3 ) konvergiert. Indem wir diese
durch eine geeignete Teilfolge ersetzen, können wir auch annehmen, dass
Γn → Γ punktweise [LL01, Theorem 2.7]. Durch die Konvexität von FT0
ist diese Folge wieder eine minimierende Folge.
Wir stellen fest, dass der Integrand in (6.0.4) von unten durch
2
−T ln(1 + e−(p −µ)/T ) beschränkt ist und zwar unabhängig von γ und
α (siehe (6.0.2)). Da diese Funktion integrierbar ist, können wir Fatou’s
Lemma [LL01, Lemma 1.7] anwenden. Kombiniert mit der punktweisen
e
Konvergenz ergibt das die Ungleichung lim inf FT0 (Γn ) ≥ FT0 (Γ).
Dadurch haben wir gezeigt, dass
e ≤ lim inf FT (Γn ) .
FT (Γ)
n→∞
e ∈ D. Somit ist Γ ein Minimierer, was die
Es ist einfach zu sehen, dass Γ
Behauptung beweist.
Nachdem wir jetzt wissen, dass ein Minimierer existiert, wollen wir diesen charakterisieren. Dazu stellen wir die Euler-Lagrange-Gleichungen zum
Funktional auf.
72
6.0 Das translations-invariante Funktional
Lemma 6.2 (Euler-Lagrange- und Gap-Gleichung)
Die Euler-Lagrange-Gleichung für einen Minimierer
γ
b(p)
α
b(p)
Γ(p) = αb(p) 1−bγ (−p) ∈ D
von FT haben die Form
γ
b(p) =
p2 − µ
1
−
∆ (p)
2 2KT,µ
(6.0.5a)
E ∆ (p) tanh µ2T
1
α
b(p) = ∆(p)
2
Eµ∆ (p)
,
(6.0.5b)
wobei die Abkürzungen
d
∆=V
α
∆
KT,µ
(p) =
Eµ∆ (p) =
(6.0.6a)
Eµ∆ (p)
,
E ∆ (p) tanh µ2T
(6.0.6b)
p
(p2 − µ)2 + |∆(p)|2
(6.0.6c)
benutzt werden. Im Besonderen genügt die Funktion ∆ der BCS-Gap-Gleichung
Z
1
∆(q)
d3 q = −∆(p).
Vb (p − q) ∆
(6.0.7)
2(2π)3/2 R3
KT,µ (q)
Die BCS-Gap-Gleichung (6.0.7) kann umgeschrieben werden zu
∆
(KT,µ
+ V /2)b
α = 0,
∆
wobei KT,µ
als Multiplikationsoperator im Fourier-Raum interpretiert
wird und V als Multiplikations-Operator im Konfigurationsraum. Diese
Form der Gleichung wird später nützlich sein.
Beweis (aus [BHS14c])
Wir behandeln zuerst den Fall T > 0. Ein Minimierer Γ von FT erfüllt die
Ungleichung
d e − Γ)
FT Γ + t(Γ
(6.0.8)
0≤
dt t=0
73
Kapitel 6 Das vereinfachte translations-invariante BCS-Funktional
e ∈ D. Wir können hier annehmen, dass Γ von 0 und 1
für beliebiges Γ
wegbleibt, indem wir wie in [Hai+08, Beweis von Lemma 1] argumentieren.
Mit Hilfe der Beziehung
Z
Z
1
3
S(Γ) = −
trC2 (Γ ln Γ) d p = −
trC2 Γ ln(Γ)+(1−Γ) ln(1−Γ) d3 p
2 R3
R3
führt eine simple Rechnung auf
d e − Γ)
FT Γ + t(Γ
dt t=0
Z
Γ 1
e − Γ) + T (Γ
e − Γ) ln
=
trC2 H∆ (Γ
d3 p,
2 R3
1−Γ
mit
H∆ =
p2 − µ ∆
¯
∆
−(p2 − µ)
,
d
wobei die Definition ∆ = V
α benutzt wurde. Bringt man alle Terme, die
e
Γ enthalten auf die linke Seite von (6.0.8), erhalten wir
Z
Γ d3 p
trC2 H∆ Γ − ( 00 01 ) + T Γ ln
1−Γ
R3
Z
Γ e − (0 0) + T Γ
e ln
≤
trC2 H∆ Γ
d3 p.
01
1
−
Γ
3
R
R
R
e−
Dabei ist R3 trC2 H∆ Γ d3 p nicht endlich, dafür ist R3 trC2 H∆ Γ
e beliebig war, minimiert Γ gleichzeitig auch das
( 00 01 ) d3 p endlich. Da Γ
lineare Funktional
Z
Γ e 7→
e − (0 0) + T Γ
e ln
Γ
trC2 H∆ Γ
d3 p,
(6.0.9)
01
1
−
Γ
3
R
dessen Euler-Lagrange-Gleichung die einfachere Form
Γ
0 = H∆ + T ln
1−Γ
74
(6.0.10)
6.0 Das translations-invariante Funktional
haben, was äquivalent ist zu
Γ=
1
1
1 + e T H∆
.
Dies impliziert (6.0.5a) und (6.0.5b), wie man wie folgt sieht:
Γ=
1
1+e
1
T
H∆
=
1 1
− tanh
2 2
1
2T
H∆ .
= g(x2 ) eine gerade Funktion ist und wegen
Aus dem Grund, dass tanh(x)
x
∆ 2
2
H∆ = [Eµ ] 1C2 vereinfacht sich der Ausdruck zu
p2 −µ
1
E∆ − 2K∆∆
∆
tanh 2Tµ
1 1
1
1
2 − 2KT
,µ
T ,µ
.
Γ = − H∆
= −
H∆ =
¯
∆
p2 −µ
1
2 2
Eµ∆
2 2KT,µ
− 2K∆∆
+
∆
2
2K
T ,µ
T ,µ
Es verbleibt der Fall T = 0. Beim Untersuchen von (6.0.9) stellt man
fest, dass F0 keine kritischen Punkte im Inneren von D hat. Um auf dem
Rand zu suchen, fordern wir für Γ die (punktweise) Randbedingung Γ(p) =
0 oder Γ(p) = 1. Dies istäquivalent zu Γ(1−Γ) = 0 was genau dann erfüllt
ist, wenn trC2 Γ(1 − Γ) = 0 und entweder γ
b(p) = γ
b(−p) oder α
b(p) = 0.
Es stellt sich heraus, dass schon die Randbedingung mit der Spur einen
kritischen Punkt liefert mit der Symmetrie γ
b(p) = γ
b(−p) oder α
b(p) = 0.
Darum minimieren wir
Z
Z
1
2
3
(p + µ)b
γ (p) d p +
|α(r)|2 V (r) d3 r + λ trC2 Γ(1 − Γ) ,
2 R3
R3
mit dem Lagrange-Multiplikator λ. Variiert man das Funktional bezüglich
Γ, findet man den kritischen Punkt Γ als Lösung von
H∆ = λ(1 − 2Γ).
Die Randbedingung Γ(1 − Γ) = 0 legt dann λ = Eµ∆ fest und man kann
nach Γ auflösen
1
1
Γ= −
H∆ .
2 2Eµ∆
Bildet man die Faltung von beiden Seiten von (6.0.5b) mit Vb und benutzt
die Relation ∆ = (2π)−3/2 Vb ∗ α
b so führt dies auf die BCS-Gap-Gleichung
(6.0.7).
75
Kapitel 6 Das vereinfachte translations-invariante BCS-Funktional
Der Minimierer des nicht-wechselwirkenden Falles V = 0,
1
γ0 (p) 0
Γ0 (p) =
=
1
0
1 − γ0 (−p)
1 + e T H0 (p)
löst auch die Euler-Lagrange-Gleichung, wobei
2
1
p −µ 0
γ0 (p) =
,
H0 =
.
1
2
0
−(p2 − µ)
1 + e T (p −µ)
Dieser kritische Punkt wird auch als Normalzustand bezeichnet. Die
Schlüsselfrage, ob das System superfluid ist, ist ob das BCS-Funktional am Normalzustand ein Minimum annimmt oder dort nur einen
Sattelpunkt hat. Um das entscheiden zu können, bilden wir die zweite
Variation.
Lemma 6.3 (Zweite Variation des BCS-Funktionals)
γ
b α
b Sei Γ = αb 1−bγ ein kritischer Punkt von FT , d.h. dass Γ die Eulerρ ϕ 1
Lagrange-Gleichungen Γ =
löst. Sei G = ϕ −ρ , wobei ϕ in der
1 H
∆
1+e T
∆
Domäne von KT,µ
+ V /2 liegt und
(
ρ=
Dann gilt
d2 dt2 αϕ+αϕ
1−2b
γ ,
0,
α(p) 6= 0
α(p) = 0.
∆
∆
FT (Γ + tG) = 2hϕ, (KT,µ
+ V /2)ϕi + 2hρ, KT,µ
ρi.
(6.0.11)
t=0
Beweis
Die zweite Ableitung überleben nur der Entropie-Term und der α-Term.
Die zweite Ableitung von letzterem ist hϕ, V ϕi.
Für den Entropie-Term,
führen wir s(z) = 21 z ln(z) + (1 − z) ln(1 − z) ein, der dadurch durch
Z
−S(Γ) =
R3
76
trC2 s(Γ) d3 p
6.0 Das translations-invariante Funktional
ausgedrückt werden kann. Als Ausgangspunkt nehmen wir die erste Ableitung des Integranden
d
trC2 s(Γ + tG) = trC2 s0 (Γ + tG)G
dt
Z
1
1
0
=
trC2
s (z)
G dz ,
2πi
z − (Γ + tG)
C
wobei C eine geschlossene Kurve ist, die das Intervall (0, 1) umschliesst.
Wir müssen diesen Ausdruck ein weiteres Mal bei t = 0 ableiten. Dabei ist
ρ so konstruiert, dass Γ und G die Anti-Kommutator-Relation {Γ, G} = G
erfüllen. Dies führt zu
1
1
1
1
1
G,
=
{G, z − Γ}
= (2z − 1)
G
z−Γ
z−Γ
z−Γ
z−Γ z−Γ
d 1
= (2z − 1)
dt t=0 z − (Γ + tG)
und man erhält
Z
d 1
s0 (z)
1
0
2
2
tr
s
(Γ
+
tG)G
=
tr
,
G
G
dz
.
C
C
dt t=0
2πi
z−Γ
C 2z − 1
Benutzt man die Zyklizität der Spur, folgt
Z
1
s0 (z)
1
1 d2 2
trC2
G dz
trC2 s(Γ + tG) =
2 dt2 t=0
2πi
C 2z − 1 z − Γ
0
s (Γ) 2
= trC2
G .
2Γ − 1
Die Funktion s erfüllt
s0 (z) 2z − 1 z=
Gleichzeitig gilt Γ =
sich
1
1
1+e T H0
=
1
1+ex
1
x
.
2 tanh(x)
. Kombiniert man diese Beziehungen, ergibt
∆
KT,µ
s0 (Γ)
=
,
2Γ − 1
2T
77
Kapitel 6 Das vereinfachte translations-invariante BCS-Funktional
oder
∆
KT,µ
d2 2 s(Γ + tG) =
tr
trC2 (G2 ).
C
dt2 t=0
T
Um den Beweis zu vollenden, setzt man diese Beziehung in den Ausdruck
d2 für dt
− T S(Γ + tG) ein.
2
t=0
Diese Beobachtung zusammen mit den Euler-Lagrange- und Gap-Gleichungen werden zu folgendem Theorem kombiniert.
Theorem 6.4
Sei V ∈ L3/2 (R3 ), µ ∈ R und 0 ≤ T < ∞. Dann sind die folgenden
Aussagen äquivalent:
(i) Der Normalzustand Γ0 ist instabil unter Paar-Formation, d.h.,
inf FT (Γ) < FT (Γ0 ).
Γ∈D
d
(ii) Es existiert Γ ∈ D, mit α 6= 0, so dass ∆ = V
α die BCS-GapGleichung
∆
1
Vb ∗ ∆
∆=
2(2π)3/2
KT,µ
löst.
(iii) Der lineare Operator
2
0
KT,µ
+ V /2,
0
KT,µ
(p)
tanh( p T−µ )
=
,
p2 − µ
hat mindestens einen negativen Eigenwert.
Beweis
(i) ⇒ (ii):
Annahme (i) zusammen mit der Existenz eines Minimierers
(Satz 6.1) impliziert sofort die Existenz eines Minimierers für den α 6= 0
gilt. Dieser muss die Euler-Lagrange-Gleichungen lösen und somit auch
78
6.0 Das translations-invariante Funktional
die Gap-Gleichung.
(ii) ⇒ (iii):
Fact:
x
x 7→ KT,µ
(p)
ist monoton wachsend für alle p. Da wir die Gap-Gleichung in die Form
∆
(KT,µ
+ V /2)b
α=0
bringen können, gilt
0
hα, (KT,µ
+ V /2)αi < 0,
0
∆
(p) für alle p, wobei ∆(p) 6= 0, was
(p) > KT,µ
sobald α 6= 0, da KT,µ
äquivalent mit α
b(p) 6= 0 ist.
(iii) ⇒ (i):
Dies ist Lemma 6.3 angewendet auf den Normalzustand Γ0 mit
0 ϕ(p)
G = ϕ(p) 0
.
Man erhält
d2 0
FT (Γ0 + tG) = 2hϕ, (KT,µ
+ V /2)ϕi,
dt2 t=0
was zeigt, dass der Normalzustand kein Minimierer ist, obwohl er ein kritischer Punkt ist.
Theorem 6.4 ermöglicht eine Präzise Definition der kritischen Temperatur durch
0
Tc (V ) := inf{T |KT,µ
+ V /2 ≥ 0}.
(6.0.12)
Anders ausgedrückt ist die kritische Temperatur Tc gegeben durch den
Wert T , für den der Operator KT0c ,µ + V /2 0 als niedrigsten Eigenwert
hat. Die Eindeutigkeit der kritischen Temperatur folgt aus der Tatsache,
0
dass KT,µ
(p) punktweise monoton in T ist. Dies impliziert, dass für jedes
Potential V eine kritische Temperatur 0 ≤ Tc (V ) < ∞ existiert, welche
die superfluide Phase für 0 ≤ T ≤ Tc (V ) von einer normalen Phase für
Tc (V ) ≤ T < ∞ trennt. Tc (V ) = 0 bedeutet dabei, dass es keine superfluide Phase für V gibt. Mit Hilfe des linearen Kriteriums (6.0.12) können
79
Kapitel 6 Das vereinfachte translations-invariante BCS-Funktional
wir die Potentiale klassifizieren, für welche Tc (V ) > 0 nicht verschwindet. Gleichzeitig kann dadurch das asymptotische Verhalten von Tc (V )
in Abhängigkeit verschiedener Parameter untersucht werden. So wird zum
Beispiel in [Fra+07; HS08a] der weak coupling limit studiert, d.h. das asymptotische Verhalten von Tc (λV ) für kleine λ > 0. Ein anderer interessanter
Fall ist der low density limit, der in [HS08c] behandelt wird. Dort wird der
Verlauf von Tc (V ) in Abhängigkeit von µ → 0 untersucht. In [BHS14c;
BHS14a] wird das Verhalten im short range limit betrachtet, in welchem
die Reichweite ` = diam(supp(V )) klein wird bei fixierter Streulänge a.
80
Literatur
[BCS57]
J. Bardeen, L. N. Cooper und J. R. Schrieffer. Theory of Superconductivity. Physical Review 108.5 (1957), S. 1175–1204.
DOI: 10.1103/PhysRev.108.1175.
[BHS14a]
G. Bräunlich, C. Hainzl und R. Seiringer. On the BCS gap
equation for superfluid fermionic gases. Mathematical Results
in Quantum Mechanics: Proceedings of the QMath12 Conference. World Scientific, Singapore, 2014, S. 127–137.
[BHS14b]
G. Bräunlich, C. Hainzl und R. Seiringer. The BogolubovHartree-Fock theory for strongly interacting fermions in the
low density limit. 2014.
[BHS14c]
G. Bräunlich, C. Hainzl und R. Seiringer. Translation invariant quasi-free states for fermionic systems and the BCS approximation. Reviews in Mathematical Physics 26.7 (2014),
S. 1450012.
DOI: 10.1142/S0129055X14500123.
[BLS94]
V. Bach, E. H. Lieb und J. P. Solovej. Generalized HartreeFock theory and the Hubbard model. J. Statist. Phys. 76.1-2
(1994), S. 3–89.
[BR02]
O. Bratteli und D. W. Robinson. Operator Algebras and
Quantum Statistical Mechanics 2: Equilibrium States. Models
in Quantum Statistical Mechanics. 2nd. New York: Springer,
2002.
[DT09]
D. Dürr und S. Teufel. Bohmian Mechanics. Springer, 2009.
[Fra+07]
R. L. Frank u. a. The critical temperature for the BCS equation
at weak coupling. J. Geom. Anal. 17.4 (2007), S. 559–567.
[Fra+08]
R. L. Frank u. a. Microscopic derivation of the GinzburgLandau theory. J. Amer. Math. Soc. 25 (2008), S. 667–
713.
81
Literatur
82
[GH12]
M. Griesemer und F. Hantsch. Unique Solutions to HartreeFock Equations for Closed Shell Atoms. Archive for Rational
Mechanics and Analysis 203.3 (2012), S. 883–900.
DOI: 10.1007/s00205-011-0464-5.
[Hai+08]
C. Hainzl u. a. The BCS functional for general pair interactions. Comm. Math. Phys. 281.2 (2008), S. 349–367.
DOI: 10.1007/s00220-008-0489-2.
[HS08a]
C. Hainzl und R. Seiringer. Critical temperature and energy gap
for the BCS equation. Phys. Rev. B 77.18 (2008), S. 184517.
DOI: 10.1103/PhysRevB.77.184517.
[HS08b]
C. Hainzl und R. Seiringer. Spectral properties of the BCS gap
equation of superfluidity. Mathematical results in quantum mechanics. World Sci. Publ., Hackensack, NJ, 2008, S. 117–136.
DOI: 10.1142/9789812832382_0009.
[HS08c]
C. Hainzl und R. Seiringer. The BCS critical temperature for
potentials with negative scattering length. Lett. Math. Phys.
84.2-3 (2008), S. 99–107.
DOI: 10.1007/s11005-008-0242-y.
[HS13]
C. Hainzl und B. Schlein. Dynamics of Bose-Einstein condensates of fermion pairs in the low density limit of BCS theory.
Journal of Functional Analysis 265 (3 Sep. 2013), S. 399–423.
[Leg80]
A. J. Leggett. Diatomic molecules and Cooper pairs. Modern
Trends in the Theory of Condensed Matter. Hrsg. von A. Pekalski und J. Przystawa. 115. Lecture Notes in Physics. Springer
Berlin / Heidelberg, 1980, S. 13–27.
DOI: 10.1007/BFb0120125.
[LL01]
E. H. Lieb und M. Loss. Analysis. 2. Aufl. American Mathematical Society, Apr. 2001.
[NSR85]
P. Noziéres und S. Schmitt-Rink. Bose condensation in an attractive fermion gas: From weak to strong coupling superconductivity. Journal of Low Temperature Physics 59 (3 1985),
S. 195–211.
DOI: 10.1007/BF00683774.
Literatur
[RS81]
M. Reed und B. Simon. I: Functional Analysis, Volume 1 (Methods of Modern Mathematical Physics) (vol 1). 1. Aufl. Academic Press, Jan. 1981.
83