Formelsammlung TM3_Teil3 - Institut für Mechanik (Bauwesen)
Werbung
")
Universität Stuttgart
Institut für Mechanik
Prof. Dr.-Ing. W. Ehlers
www.mechbau.uni- stuttgart.de
Ergänzung zur Vorlesung
Technische Mechanik III – Teil III
Formelsammlung
Stand WS 2012/13
letzte Änderung: 9.1.2013
Lehrstuhl für Kontinuumsmechanik, Pfaffenwaldring 7, D - 70 569 Stuttgart, Tel.: (0711) 685 - 66346
Materieller Körper, Konfiguration und Bewegung
1
TEIL I: Allgemeine Vorraussetzungen
1
Materieller Körper, Konfiguration und Bewegung
Definition:
Ein materieller Körper B ist eine kontinuierlich verteilte Menge materieller Punkte P, die sich eindeutig auf Gebiete des Anschauungsraums
abbilden läßt. Eine solche Abbildung heißt Konfiguration.
Einführung der Plazierungsfunktion:
x = χ(P, t)
Bem.: Die Bewegungsfunktion χ weist jedem materiellen Punkt P ∈ B zu jeder
Zeit t ≥ t0 eine eindeutige Lage x(t) zu.
Anfangsbedingung (t = t0 ):
X = x(t = t0 ) = χ(P, t0 )
Folgerung: Man identifiziert die materiellen Punkte P ∈ B durch ihre Ausgangslage X
zum Zeitpunkt t0 .
Einführung der Bewegungsfunktion:
x = χ(X, t)
Geschwindigkeit und Beschleunigung:
• Einführung der Geschwindigkeit als zeitliche Änderung der Bewegung
v := ẋ =
d
χ(X, t)
dt
• Einführung der Beschleunigung als zeitliche Änderung der Geschwindigkeit
b := v̇ = ẍ =
d
d2
v(X, t) = 2 χ(X, t)
dt
dt
Bem.: Bewegung, Geschwindigkeit und Beschleunigung sind Feldfunktionen,
d. h. Funktionen von Ort und Zeit:
{x, ẋ, ẍ} = f (X, t)
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Darstellung der Bewegung in natürlichen Koordinaten
2
2
Darstellung der Bewegung in natürlichen
Koordinaten
2.1
Darstellung der Bewegung im Raum
Darstellung der Bewegung in kartesischen Koordinaten in einem raumfesten
Bezugssystem { O, ei }:
Θ3
X3
Bewegung:
a3
a2
e1
e3
x
O
Θ1
e2
a1
Θ2
x = xi (X1 , X2 , X3 , t) ei
m
Tangentenvektoren:
X2
ai :=
X1
∂x
∂x
=
∂Θi
∂Xi
Bemerkungen:
• Die Parameterlinien Xi sind die natürlichen Koordinaten des Raumes.
• Bezüglich kartesischer Koordinaten sind die Tangentenvektoren ai (natürliche Basis)
und die orthonormierten Basisvektoren ei identisch.
• Man identifiziert die speziellen natürlichen Koordinaten Xi mit den allgemeinen
natürliche Koordinaten Θi .
• Die Parameterlinien Θi müssen nicht entlang einer Geraden gemessen werden (krummlinige Koordinaten).
Darstellung der Bewegung in krummlinigen Koordinaten in einem raumfesten
Bezugssystem { O, ei }:
X3
e1
Θ3
e3
a1
O
e2
a3
m
Θ1
a2
Θ2
X2
Bewegung:
x = xi (Θ1 , Θ2 , Θ3 , t) ei
Tangentenvektoren:
ai :=
X1
∂x
∂Θi
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Darstellung der Bewegung in natürlichen Koordinaten
3
Darstellung der Bewegung in Zylinderkoordinaten:
Einführung natürlicher Koordinaten (Zylinderkoordinaten):
X3
Θ1 = ρ ;
e3
e1
e2
ϕ
Θ 3 = X3
Transformationsbeziehungen zwischen Xi und Θi :
x
e3
O
Θ2 = ϕ ;
eϕ
X1
=
ρ cos ϕ =
Θ1 cos Θ2
eρ
X2
=
ρ sin ϕ =
Θ1 sin Θ2
X3
=
Θ3
X2
Ortsvektor x in natürlichen Koordinaten:
ρ
x = Θ1 cos Θ2 e1 + Θ1 sin Θ2 e2 + Θ3 e3
X1
Differentiation nach Θi und Normierung der Tangentenvektoren liefert:
eρ
=
eϕ
=
e3
=
a1
a2
|a2 |
a3
=
cos ϕ e1
+
sin ϕ e2
=
− sin ϕ e1
+
cos ϕ e2
Beispiel: Bewegung auf einer Zylindermantelfläche (ρ = r = konst.)
X3
e3
x
e3
O
eρ
=
cos ϕ e1
+
sin ϕ e2
eρ
eϕ
=
+
cos ϕ e2
e3
=
− sin ϕ e1
X2
e1 ϕ e2
X1
eϕ
e3
ρ = r = konst.
Beispiel: Bewegung auf einer Kreisbahn (ρ = r = konst. und X3 = konst.)
eϕ
e2
O
e1
ϕ
eρ
eϕ
=
eρ
=
− sin ϕ e1 + cos ϕ e2
cos ϕ e1 + sin ϕ e2
r
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinematik der Massenpunkte
4
TEIL II: Kinematik der Massenpunkte und der
Starrkörper
3
Kinematik der Massenpunkte
3.1
Geradlinige Bewegung
Charakterisierung der Bewegung mit Hilfe der Beschleunigung b:
> 0 :
= 0 :
b
< 0 :
beschleunigte Bewegung
gleichförmige Bewegung
verzögerte Bewegung
Grundaufgaben der geradlinigen Bewegung:
Fall 1:
b = konst.
b =
dv
dt
→
v = b (t − t0 ) + v0
=
ds
dt
→
s =
v
Fall 2:
Fall 3:
b = b (t)
b (t)
=
v (t)
=
1
2
b (t − t0 )2 + v0 (t − t0 ) + s0
(zeitabhängige Beschleunigung)
Z t
dv
→
v =
b (t̃) dt̃ + v0
dt
t0
Z tZ t
ds
b (t̃) dt̃ dt̃ + v0 (t − t0 ) + s0
→
s =
dt
t0 t0
b = b (v)
dt
=
ds =
Fall 4:
(konstante Beschleunigung)
(geschwindigkeitsabhängige Beschleunigung)
Z v
dv
1
→
t =
dṽ + t0
b (v)
v0 b (ṽ)
Z v
ṽ dṽ
v dv
→
s =
+ s0
b (v)
v0 b (ṽ)
b = b (s)
b (s) =
dt
=
(wegabhängige Beschleunigung)
Z s
v dv
1
2
2
→
b (s̃) ds̃
(v − v0 ) =
2
ds
s0
Z s
ds̃
ds
→
t =
+ t0
v(s)
s0 v(s̃)
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinematik der Massenpunkte
3.2
5
Krummlinige Bewegung
Darstellung in Zylinderkoordinaten (Bezug der Bewegung auf eρ , eϕ , e3 ):
eρ
=
cos ϕ e1
+ sin ϕ e2
eϕ
=
+ cos ϕ e2
e3
=
− sin ϕ e1
ė = ϕ̇ eϕ
ρ
ėϕ = − ϕ̇ eρ
ė3 =
0
−→
konst.
Ortsvektor, Geschwindigkeit und Beschleunigung:
x
= ρ cos ϕ e1
+
ρ sin ϕ e2
+
x3 e3
ρ eρ
+
x3 e3
=
v = ẋ
b = v̇ = ẍ
=
=
ρ̇ eρ
+
ρ ėρ
+
ẋ3 e3
=
ρ̇ e
|{z} ρ
vρ
+
ρ ϕ̇ e
|{z} ϕ
vϕ
+
ẋ3 e3
|{z}
v3
ρ̈ eρ + ρ̇ ėρ
= (ρ̈ − ρ ϕ̇2 ) eρ
| {z }
bρ
+ (ρ̇ ϕ̇ + ρ ϕ̈) eϕ + ρ ϕ̇ ėϕ
+
ẍ3 e3
+
+
ẍ3 e3
|{z}
b3
(2 ρ̇ ϕ̇ + ρ ϕ̈) eϕ
|
{z
}
bϕ
Bewegung auf der Zylindermantelfläche (ρ = r = konst.):
x
=
r eρ
v
=
b
= − r ϕ̇2 eρ
+ x3 e3
r ϕ̇ eϕ
+ ẋ3 e3
+ r ϕ̈ eϕ
+ ẍ3 e3
Bewegung auf einer Kreisbahn (ρ = r = konst. und x3 = konst.):
x
=
v
=
b
= − r ϕ̇2 eρ
| {z }
bρ
v
ϕ
bρ
mit
bϕ
r eρ
+
x3 e3
+
r ϕ̇ e
|{z} ϕ
vϕ
r ϕ̈ e
|{z} ϕ
bϕ
:
Umfangsgeschwindigkeit
:
Zentripetalbeschleunigung
:
Umfangsbeschleunigung
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinematik der Massenpunkte
3.3
6
Relativbewegung
Bem.: Manchmal kann es sinnvoll sein, Bewegungen in einem mitbewegten Be∗ ∗
zugssystem {O, e1 } zu formulieren. Dabei ist zu beachten, daß bei Zeitableitungen die Basis des Relativsystems ebenfalls eine Zeitableitung besitzt.
Veranschaulichung:
∗
ϕ
e3
∗
e2
∗
∗ O
∗
e1
x
r
x
e3
O
Zusammenhang zwischen Absolut- und Relativbewegung:
v = ẋ = ṙ + x∗˙
∗
mit
x = r+x
¨∗
b = v̇ = r̈ + x
Zeitableitung der Basisvektoren:
∗
∗
˙
ei = ω × ei
e2
e1
mit ω = ϕ̇
Zeitableitung im Relativsystem:
∗
∗
Für einen beliebigen Vektor u = ui ei im Relativsystem gilt:
∗ ▽
∗
∗˙
(u)
:= ui (t) ei
: relative (Oldroyd )-Ableitung
∗
∗ ▽
∗
˙
mit
ui = (u) + ω × u
∗
∗
∗
˙
ω × u = ui (t) ei : Anteil aus Änderung der Basis
Allgemeine Formel für Absolutgeschwindigkeit und Absolutbeschleunigung:
v
∗
=
ω × x}
|ṙ + {z
Führungsgeschwindigkeit
b
=
∗
∗
r̈ + ω̇ × x + ω × (ω × x) +
|
{z
}
Führungsbeschleunigung
∗
v
|{z}
+
Relativgeschwindigkeit
∗
|2 ω{z× v}
Coriolis -Beschleunigung
∗
+
b
|{z}
Relativbeschleunigung
Möglichkeit zur Berechnung von Relativaufgaben:
∗
∗
∗
(a) Einsetzen in die Formeln, d. h., Formulierung von ṙ , ω , x , v , r̈ , ω̇ , b
(b) Aufstellen des Ortsvektors und anschließendes zeitliches Ableiten
(Koeffizienten und Basis)
Einschub Koordinatentransformationen für Drehung in der Ebene:
e2
∗
e2
∗
e1
∗
e3 = e3
ϕ
∗
∗
∗
cos ϕ e1 − sin ϕ e2
e2 =
sin ϕ e1 + cos ϕ e2
∗
e1
∗
e1 =
e1 =
cos ϕ e1 + sin ϕ e2
∗
e2 = − sin ϕ e1 + cos ϕ e2
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinematik der Starrkörper
4
7
Kinematik der Starrkörper
Allgemeine Bewegung des starren Körpers
Bem.: Der Starrkörper besitzt 6 Freiheitsgrade im Raum (3 Translationen und 3
Rotationen). Bei der Bewegung des Starrkörpers erfahren die Vektoren x̄
und x̂ lediglich eine Rotation, d. h. x̄˙ = ω × x̄ und x̂˙ = ω × x̂ .
Geschwindigkeit und Beschleunigung bei
Bezug auf Ō:
ω
B
P
x̄
Ō
Ô
x̄ − x̂
xŌ x
e3
e1
+
+
b = v̇
= v̇Ō
= bŌ
+ (ω × x̄)˙
+ ω̇ × x̄ + ω × (ω × x̄)
Wechsel des Bezugspunkts::
xÔ
= vŌ
= vÔ
= vŌ
vÔ
v
e2
O
= ẋŌ
= vŌ
ω̂
x̂
x̄˙
ω × x̄
v = ẋ
→
+ ω × (x̄ − x̂)
+ ω̂ × x̂
+ ω × x̄ + (ω̂ − ω) × x̂
ω = ω̂
Reduktion auf eine Geschwindigkeitsschraube (vŌ und ω besitzen eine gemeinsame
Wirkungslinie):
x̄B =
ω × vŌ
ω·ω
→
vB =
ω · vŌ
ω
ω·ω
Ebene Bewegung des Starrkörpers
Bem.: Die ebene Bewegung des Starrkörper ist ein Sonderfall der allgemeinen Bewegung. Es verbleiben 3 kinematische Freiheitsgrade, nämlich zwei Translationen in der Ebene und eine Rotation senkrecht zu Ebene. Damit entspricht der Ortsvektor x̄B bei Reduktion auf eine Geschwindigkeitsschraube
der Lage des momentanen Geschwindigkeitspols mit vB = 0 , da vŌ k ω .
(a) Geschwindigkeitzustand und momentaner Geschwindigkeitspol MV :
X2
Lage des momentanen Geschwindigkeitspols MV :
ē1
ē2
P
x̄
ω
e2
O
xŌ
Ō
e1
x − x̄M V
xM V =
ω × vŌ
ω·ω
mit
x̄M V
MV
Betrag von xM V :
X1
x̄M V =
vM V = 0
vŌ
ω
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinematik der Starrkörper
8
Graphische Methoden zur Bestimmung des momentanen Geschwindigkeitspols:
A die Geschwindigkeit vA bekannt, so liegt der momentane Ge• Ist in einem Punkt A
schwindigkeitspol MV auf der Senkrechten zu vA in .
A und B die Geschwindigkeiten vA und vB bekannt, so liegt MV im Schnitt• Sind in A und B auf vA und vB errichteten Senkrechten.
punkt der beiden in • Ist ein Punkt bekannt, für den v = 0 gilt, so ist dieser Punkt der momentane Geschwindigkeitspol MV.
vB
MV2
Veranschaulichung:
B
1
MV1
2
vA
A
Gangpolbahn und Rastpolbahn:
• Gangpolbahn (körperfest): Menge aller momentanen Geschwindigkeitspole des Körpers.
• Rastpolbahn (bahnfest):
Menge aller momentanen Geschwindigkeitspole der Bahn,
auf der der Körper abrollt.
Beispiel: Rollendes Rad
r
Gangpolbahn
M
r
vM = ω r
ω
MV
Rastpolbahn Geschwindigkeitszustand
(b) momentaner Beschleunigungspol MB:
xM B =
ω̇ × bŌ + (ω · ω) bŌ
ω̇ · ω̇ + (ω · ω)2
mit bM B = 0
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der Massenpunkte und der Massenpunktsysteme
9
TEIL III: Kinetik der Massenpunkte und der
Massenpunktsysteme
5
Impuls- und Drallsatz
5.1
Impulssatz der Punktkinetik
Bem.: Der Impulssatz hat axiomatischen Charakter und basiert auf der Naturbeobachtung.
Newtonsche Gesetze:
1. Ein Körper, auf den keine resultierende Kraft einwirkt, verharrt im Zustand der Ruhe
bzw. der gleichförmigen Bewegung (v = konst.).
2. Newtonsches Grundgesetz (Impulssatz):
Kraft = Masse × Beschleunigung“
”
3. Reaktionsgesetz:
Actio = Reactio“
”
4. Gesetz vom Kräfteparallelogramm
Formelmäßige Darstellung der Gesetze 1. und 2.:
• Das 1. Newtonsche Gesetz (Impulserhaltungssatz) lautet:
0=k
←→
m v = konst.
• Das 2. Newtonsche Gesetz (Impulssatz) lautet:
mb = k
m = konst.
mit
k : auf den Massenpunkt einwirkende
resultierende Kraft
Axiomatische Einführung des Impulssatzes:
Impuls (Bewegungsgröße) = Masse × Geschwindigkeit“
”
Axiom:
−→
l = mv
Die zeitliche Änderung des Impulses enspricht der Summe der auf den
Massenpunkt m angreifenden Kräfte. −→ l̇ = k
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der Massenpunkte und der Massenpunktsysteme
10
Diskussion des Impulssatzes:
Impulssatz für Systeme mit veränderlichen Massen:
m v̇ + ṁ v = k
Massenänderung in Abhängigkeit von v nach Einstein:
(
m0 : Ruhemasse
m0
m= p
mit
1 − ( vc )2
c
: Lichtgeschwindigkeit
Allgemeine Vorgehensweise:
1. Massenpunkt freischneiden und alle Kräfte antragen.
2. Impulssatz in Koordinatenrichtungen aufstellen.
3. Durch Integration x bestimmen oder bei bekannter Bewegung k berechnen.
Inertialsysteme und Galilei -Transformation:
Definition:
Alle Bezugssysteme, in denen das Newtonsche Grundgesetz gilt, sind
Inertialsysteme.
Wechsel des Bezugssystems:
∗
ω
e3
∗
e2
∗
k
∗ O
∗
e1
x
r
x
e3
O
b = bf + bc + br
bf
bc
br
mit
e2
e1
∗
∗
= r̈ + ω̇ × x + ω × (ω × x)
∗
= 2ω × v
∗
= b
Im Absolutsystem (Inertialsystem) bzgl. {0, ei } gilt: k = m b = m (bf + bc + br )
∗
∗
∗
∗
Im Relativsystem bzgl. {0, ei } gelte: k = m br
Forderung, damit auch {0, ei } Inertialsystem ist:
b ≡ br →
bf ≡ 0
bc ≡ 0
→
r̈ = 0 → ṙ = konst.
ω̇ = ω = 0
Jedes Bezugssystem, daß durch eine gleichförmige Translationsbewegung (ṙ = konst.) aus
einem Inertialsystem hergeleitet wird, ist selbst ein Inertialsystem. Die Ortsvektoren genügen
der Galilei -Transformation:
∗
x = x + ṙ t
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der Massenpunkte und der Massenpunktsysteme
11
Beispiele zum Impulssatz der Punktkinetik
Schiefer Wurf
Bem.: Freier Wurf im Schwerefeld (2-d Problem) ohne Luftwiderstand.
x2
v0
h0 e2
gegeben: v0 , ϕ0 , h0 , g.
ϕ0
max x2
gesucht: Wurfbahn x2 (x1 ), Wurfzeit tw ,
g
e1
O
Wurfweite x1w , Wurfhöhe max x2 .
x1
x1w
g
x21
2
2
2v0 cos ϕ0
Wurfbahn:
x2 (x1 ) = h0 + tan ϕ0 x1 −
Wurfzeit:
v0 sin ϕ0
+
tw =
g
Wurfweite:
x1w = x1 (tw ) = v0 cos ϕ0 tw
Wurfhöhe:
v02 sin2 ϕ0
max x2 = h0 +
2g
s
v0 sin ϕ0
g
2
+
2h0
g
mit h0 = 0 folgt
x1w =
v02
sin2 ϕ0
g
Geführte Bewegung
Bem.: Klotz auf schiefer Ebene im Schwerefeld mit Coulombscher Gleitreibung.
G
G1
R
α
g
G2
m
e2
O
e1
F
α
gegeben: m, α, µG , x0 , v0 , g.
gesucht: Bewegung, Geschwindigkeit, Beschleunigung
(
e1 : m ẍ1 = G1 − R
m ẍ = k →
e2 : m ẍ2 = F − G2
Bewegung in e2 -Richtung nicht möglich (Führung): x2 ≡ 0 → ẋ2 = ẍ2 = 0
Bewegung in e1 -Richtung
ẍ = g (sin α − µG cos α) = b1 = konst.
1
ẋ1 = g (sin α − µG cos α) t + v0
x1 = 21 g (sin α − µG cos α) t2 + v0 t + x0
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der Massenpunkte und der Massenpunktsysteme
5.2
12
Drallsatz der Punktkinetik
Drall (Drehimpuls) hB des Massenpunkts m:
l = mv
m
x
e3
O
x − xB
hB = (x − xB ) × l
hB
Bem.: B ist ein beliebiger raumfester Punkt
B
xB
Zeitableitung von hB :
e2
ḣB = (x − xB ) × l̇
e1
Drallsatz: Die zeitliche Änderung des Drallvektors entspricht dem Moment der auf den
Massenpunkt m einwirkenden Kräfte bzgl. desselben raumfesten Punkts B.
ḣB = mB
Bem.: Der Drallsatz der Punktkinetik ist kein eigenständiges Axiom, da er aus
dem Impulssatz hergeleitet werden kann.
5.3
d‘Alembert sche Trägheitskräfte
Bem.: Die Einführung d’Alembertscher Trägheitskräfte basiert auf der Interpretation der Trägheitswirkungen (Scheinkräfte) als eingeprägte Kräfte.
d‘Alembertsches Kräftegleichgewicht (dynamisches Gleichgewicht):
aus dem Impulssatz folgt
t = −m ẍ
mit
→
0=k+t
t : d‘Alembertsche Trägheitskraft
Veranschaulichung: Freier Fall
Newtonsche Formulierung
d’Alembertsche Formulierung
T = m ẍ
m
x
m
x
G
m ẍ = G
G
0=G−T
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der Massenpunkte
6
13
Impuls- und Drallbilanzsätze
Impuls- und Drallbilanz
Bem.: Impuls- und Drallbilanz sind die integrierten Formen von Impuls- und Drallsatz. Die Impuls- und Drallbilanz können z. B. bei Stoßvorgängen zwischen
Massenpunkten und starren Körpern verwendet werden.
Impulsbilanz:
l̇ = k → l(t2 ) − l(t1 ) =
Z
t2
k dt =: K
t1
mit K : Kraftantrieb
Drallbilanzsatz:
ḣB = mB → hB (t2 ) − hB (t1 ) =
Z
t2
mB dt =: MB
t1
mit MB : Momentenantrieb
Impuls- und Drallerhaltung
Bem.: Sonderfälle für k = 0 bzw. mB = 0.
Impulserhaltungssatz:
Drallerhaltungssatz:
l(t2 ) − l(t1 ) = 0 → l(t) = konst.
hB (t2 ) − hB (t1 ) = 0 → hB (t) = konst.
7
Energie- und Arbeitssatz
Arbeitssatz der Mechanik
K
=
A12
1 − K
2
|
| {z }
{z
}
kinetische Energie in
Arbeit der auf m einwirkenden Kräfte
1 und 2 geleistet wird
die zwischen 1 und 2
den Zuständen allgemein gilt:
A12 =
Z
x2
x1
F · dx
→ Projektion der Summe der eingeprägten Kräfte F in Wegrichtung durch Skalarprodukt
(nur Kräfte in Bewegungsrichtung interessieren).
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der Massenpunkte
14
Arbeit konservativer und nicht-konservativer Kräfte:
A12 =
Ã
+
Ā
| {z12}
| {z12}
nicht-konservative
konservative Kräfte
Kräfte (z. B. Reibung) (z. B. Gewichtskräfte)
Konservative Kräfte: Eine Kraft ist konservativ, wenn ihre Arbeit A12 nicht vom Weg
1 mit t1 und 2
abhängt, auf dem sie zwischen den Zuständen mit t2 geleistet wird.
Arbeit und Potential konservativer Kräfte:
Ā12 = − U12
−→
Z 2
dU
dx = U
= −
1 − U
2
1 dx
K
1 + Ã12
1 + U
2 = K
2 + U
{z
}
|
Energieerhaltungssatz
|
{z
}
Arbeitssatz
Bem.: Die Anwendung des Energieerhaltungssatzes setzt Ã12 vorraus, d. h., es wirken nur konservative Kräfte.
Kinetische Energie K :
∗ Translation:
1
2
m v2
∗ Rotation: 21 θM ω 2
(nur ausgedehnte Körper)
Potentielle Energie U :
∗ Lageenergie: m g h
∗ Normalkraftfeder:
∗ Momentenfeder:
1
2
1
2
cf f 2
cϕ ϕ 2
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
15
TEIL IV: Kinetik der starren Körper
8
Impuls- und Drallsatz
Bilanzrelationen für Impuls und Drall
∗ Kinetik der Massenpunkte
• Impulssatz: axiomatische Einführung
• Drallsatz:
Herleitung aus dem Impulssatz, d. h. kein eigenständiges Axiom
∗ Kinetik der materiellen Körper
• Impulssatz: axiomatische Einführung
• Drallsatz:
ist ein eigenständiges Axiom
Massenbilanz des materiellen Körpers
Axiom: In einem geschlossenen System bleibt die Masse eines materiellen Körpers B
konstant.
m (B, t) = konst.
ṁ (B, t) = 0
Impulssatz des materiellen Körpers
Axiom: Die zeitliche Änderung des Impulses entspricht der am Körper B
angreifenden resultierenden Kraft.
l̇ (B, t) = k (B, t)
mit
l̇ (B, t) =
Z
V
ẋ dm ˙ =
Z
ẍ dm (mit Massenerhaltungssatz)
V
k (B, t) : resultierende Kraft
daraus folgt:
Z
ẍ dm = k (B, t)
V
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
16
Formulierung des Impulssatzes bzgl. des Massenmittelpunkts:
Lage des Massenmittelpunkts:
Z
1
xM =
x dm →
m V
m ẋM =
Z
ẋ dm
V
→
m ẍM =
Z
ẍ dm
V
Schwerpunktsatz (Impulssatz bzgl. des Massenmittelpunkts):
m ẍM = k (B, t)
Drallsatz des materiellen Körpers
Formulierung des Drallsatzes
Axiom: Die zeitliche Änderung des Drallvektors entspricht der Summe der Momente aller
am Körper B angreifenden Kräfte bzgl. desselben raumfesten Punkts B.
t
l = ẋ dm
B
✎☞
P
✍✌
x − xB
hB
f
e3
✎☞
x
B
✍✌
xB
O
ḣB = mB (B, t)
mit
V
e2
e1
Z
hB (B, t) =
(x − xB ) × ẋ dm
m (B, t)
:
Moment bzgl. B
Es gilt mit dem Massenerhaltungssatz
ḣB =
Z
V
es folgt:
Z
V
(x − xB ) × ẍ dm
(x − xB ) × ẍ dm = mB (B, t)
Formulierung des Drallsatzes bzgl. des Massenmittelpunkts
ẋ dm
✎☞
e3
O
e1
x
B
e3
P
✎☞
✍✌
x M
✍✌
e1 e2
xM x − xB
e2
xB
ḣM (B, t) = mM (B, t)
mit
hB
✎☞
B
✍✌
Z
h (B, t) =
x̄ × x̄˙ dm
M
V
x̄ = x − xM
˙
x̄ = ω × x̄
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
17
Drallvektor und Massenträgheitstensor
Drallvektor bzgl. des Massenmittelpunkts
hM (B, t) =
Z
M
x̄ × (ω × x̄) dm =: θ M ω
mit
(
hM (B, t) : Drallvektor bzgl. M
θM
: Massenträgheitstensor
Massenträgheitstensor bzgl. des Massenmittelpunkts
Z
θM =
[(x · x) I − (x ⊗ x)] dm
M
Auswertung des Massenträgheitstensors
Bezüglich des Massenmittelpunkts eines starren Körpers folgt
Z
θM
=
[(x21 + x22 + x23 )δij − xi xj ] dm (ei ⊗ ej )
|M
{z
}
θij
mit θ ij : Koeffizienten des Massenträgheitstensors θ M
•
axiale Massenträgheitsmomente
θ̄11 =
θ̄22 =
θ̄33 =
Z
ZM
ZM
(x̄22 + x̄23 ) dm
(x̄21 + x̄23 ) dm
(x̄21 + x̄22 ) dm
M
•
Deviationsmomente
θ̄12 = θ̄21 = −
θ̄13 = θ̄31 = −
θ̄23 = θ̄32 = −
•
Z
ZM
ZM
x̄1 x̄2 dm
x̄1 x̄3 dm
x̄2 x̄3 dm
M
polares Massenträgheitsmoment
θ̄P :=
Z
(x̄21 + x̄22 + x̄23 ) dm =
M
1
2
(θ̄11 + θ̄22 + θ̄33 )
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
18
Massenträgheitsmomente in unterschiedlichen Bezugssystemen
(a) Wechsel des Bezugssystems
Veranschaulichung:
ē3
dm
x̄
x̂
M
✍✌
ē2 ê3
ē1
x̂
✎☞
M
e3
e1
xM
O
ê1
B
Ô ê2
e2
Drallvektor bzgl. 0̂:
hÔ (B, t) = θ Ô ω
Translation des Bezugssystems (Satz von Steiner-Huygens):
θ Ô = θ M + [(x̂M · x̂M ) I − (x̂M ⊗ x̂M )] m
bzw. in Koeffizientendarstellung:
θ̂ij = θ̄ij + [(x̂2M 1 + x̂2M 2 + x̂2M 3 ) δij − x̂M i x̂M j ] m
{z
}
|
Steiner-Anteile
•
axiale Massenträgheitsmomente
θ̂11 = θ̄11 + m (x̂2M 2 + x̂2M 3 )
θ̂22 = θ̄22 + m (x̂2M 1 + x̂2M 3 )
θ̂33 = θ̄33 + m (x̂2M 1 + x̂2M 2 )
•
Deviationsmomente für i 6= j
θ̂ij = θ̄ij − m(x̂M i x̂M j )
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
19
Rotation des Bezugssystems bzgl. des Massenmittelpunkts
Bem.: θ M bleibt erhalten, seine Koeffizienten ändern sich jedoch mit der Rotation
des Bezugssystems
ē3
ẽ1
M
e1
ẽ3
mit
ē2
ē1
e3
θ M = θ̃op (ẽo ⊗ ẽp )
ẽ2
Bem.: R̃ kann dargestellt werden durch:
ϕ̃
•
•
•
•
xM
O
θ̃op = R̃oi θ̄ij R̃pj
e2
3
3
3
1
voneinander unabhängige Richtungs-Cosini
Cardanosche Winkel
Euler sche Winkel
Euler-Rodriguez -Winkel
Hauptträgheitsmomente
Hauptträgheitsmomente für den allgemeinen 3-dimensionalen Fall durch Lösen des Eigenwertproblems bzw. durch Drehung des Basissystems bis ein Zustand erreicht wird, bei dem
alle Deviationsmomente verschwinden
θ
0
0
1
3
P
θ M = θij (ei ⊗ ej ) =
θi (ei ⊗ ei )
mit θij = 0 θ2 0
i=1
0 0 θ3
θi : zugehörige Hauptträgheitsmomente (Eigenwerte λi ≡ θi von θ M )
mit
ei : zugehörige Hauptrichtungen
Charakteristische Gleichung des Eigenwertproblems
IIIθ M − λ IIθM + λ2 Iθ M − λ3 = 0
I
θM
IIθ M
mit
III
θM
=
=
=
θM · I
1
2
[(θ M · I)2 − θ M θ M · I ]
det θ M
Hauptinvarianten
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
20
Beispiele zur Berechnung von Massenträgheitsmomenten
Geometrie
θ11
θ22
θ33
0
ml2
12
ml2
12
mR2
4
mR2
4
mR2
2
schlanker prismatischer Stab
e2
r << l
e1
e3
l
dünne Kreisscheibe
R
R
e3
e2
e1
Zylinder
e3
e1
e2
R
R
h
R2 h2
+ )
4
12
mR2
2
2mR2
5
2mR2
5
2mR2
5
m 2
(b + h2 )
12
m 2
(l + h2 )
12
m 2
(b + l2 )
12
m(
R2 h2
+ )
4
12
m(
Kugel
e3
e2
e1
R
Quader
e3
h
e1
e2
l
b
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
9
9.1
21
Energie- und Arbeitssatz
Energiesatz des materiellen Körpers
Energiesatz (Bilanz der mechanischen Leistung)
mit
K̇ = La + Li
La
Li
:
:
Leistung der äußeren Kräfte
Leistung der inneren Spannungen
Sonderfall des starren Körpers
Bem.: Am starren Körper verschwindet die Leistung der inneren Spannungen (keine Verzerrungsgeschwindigkeiten), d. h.
Li ≡ 0
−→
K̇ = La
Für die kinetische Energie des starren Körpers gilt
1
2
K =
1
2
m ẋM · ẋM +
=
1
2
m ẋM · ẋM + 21 ω · θ M ω
ω · hM (B, t)
Bem.: Die kinetische Energie K setzt sich aus der Translationsenergie bzgl. des
Massenmittelpunkts und der Rotationsenergie um den Massenmittelpunkt
zusammen.
Leistung der äußeren Kräfte
La = ẋM · k(B, t) + ω · mM (B, t)
n
P
k(B,
t)
=
fi
i=1
mit
n
P
x̄i × fi
mM (B, t) =
i=1
Einsetzen in den Energiesatz liefert
K̇ = La ←→ ẋM · m ẍM + ω · ḣM (B, t) = ẋM · k(B, t) + ω · mM (B, t)
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
9.2
22
Arbeitssatz und Energieerhaltungssatz
Arbeitssatz für starre Körper (konservative und nicht-konservative Kräfte)
Z 2
K
La (B, t) dt
2 − K
1 = Aa12 (B, t) =
1
mit
Aa12 = Ãa12 + Āa12
K
Aa12
(
=
1
2
=
Z
m ẋM · ẋM + 21 ω · hM
2
1
(ẋM · k + ω · mM ) dt
Ãa12 : Arbeit der nicht-konservativen Kräfte
Āa12 : Arbeit der konservativen Kräfte (Ua
1 − Ua
2 )
K
2 + Ua
2 = K
1 + Ua
1 + Ãa12
Energieerhaltungssatz für starre Körper (Ãa12 ≡ 0)
K(B, t) + Ua (B, t) = konst.
→
9.3
K
2 + Ua
2 = K
1 + Ua
1
Das Prinzip von d‘Alembert
Bem.: Das Prinzip von d‘Alembert (Pvd‘A) hat in der Kinetik denselben Stellenwert wie das Prinzip der virtuellen Arbeit (PdvA) in der Statik.
Formulierung des Prinzips:
Bem.: Man ersetzt im Energiesatz (Bilanz der mechanischen Leistung) die
Translations- und Rotationsgeschwindigkeit durch virtuelle Größen, d. h.
ẋM → δxM : virtuelle Verschiebung
ω
→ δϕ : virtuelle Verdrehung
[k(B, t) − mẍM ] · δxM + [mM (B, t) − ḣM (B, t)] · δϕ = 0
Bem.: • Führungskräfte und -momente sind orthogonal zu virtuellen Größen δxM
und δϕ
• Für den Fall der Statik geht das Prinzip von d‘Alembert (Pvd‘A) in das
Prinzip der virtuellen Arbeit (PdvA) über, es gilt: ẍM ≡ 0, ϕ̈ = ω̇ ≡ 0
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
10
23
Die ebene Starrkörperbewegung
Beschreibende Gleichungen
Bem.: Darstellung der ebenen Bewegung in der e1 -e2 -Ebene; von den 6 Kinematen
der allgemeinen Bewegung verbleiben 3 Kinematen bei ebener Bewegung:
2 Translationsgeschwindigkeiten : ẋM1 , ẋM2
1 Rotationsgeschwindigkeit :
ω3 = ϕ̇3
Koeffizientendarstellung von Schwerpunkt- und Drallsatz:
e1 : m ẍM 1 = k1
e2 : m ẍM 2 = k2
)
Schwerpunktsatz
e3 : θM ω̇3 = mM 3 : Drallsatz
Energiesatz (Bilanz der mechanischen Leistung) bei ebener Starrkörperbewegung:
• Auswertung bezüglich M:
K̇ = La → (m v̇M ) vM + (θM ω̇3 ) ω3 = k1 ẋM 1 + k2 ẋM 2 + mM 3 ω3
• Auswertung bezüglich MV :
K̇ = La −→ (θM V ω̇3 ) ω3 = mM V 3 ω3
Arbeitssatz bei ebener Starrkörperbewegung:
K
1 = Aa12 (B, t) =
2 − K
K=
La =
(
(
Z
2
1
La (B, t) dt
1
2
m (ẋ2M 1 + ẋ2M 2 ) + 12 θM ω32
:
bzgl. M
1
2
θM V ω32
:
bzgl. MV
k1 ẋM 1 + k2 ẋM 2 + mM 3 ω3
:
bzgl. M
mM V 3 ω3
:
bzgl. MV
Energieerhaltungssatz bei ebener Starrkörperbewegung:
K
2 + Ua
2 = K
1 + Ua
1
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
11
24
Stoßvorgänge
11.1
Beschreibende Gleichungen
zentrischer Stoß
exzentrischer Stoß
Ba
Stoßnormale
Bb
Ma
Bb
Ba
Mb
Ma
Mb
Berührungsfläche
• Zentrischer bzw. zentraler Stoß:
Die Stoßnormale führt durch die Massenmittelpunkte beider Körper.
• Exzentrischer Stoß:
sonst
Bem.: Es können sehr komplexe Prozesse beim Stoßvorgang entstehen, die hier
unter den folgenden, stark idealisierenden Annahmen beschrieben werden.
Annahmen zur Beschreibung des Stoßproblems:
• Die Stoßdauer τ sei vernachlässigbar klein: τ → 0 .
• Während der Stoßdauer ändern die Körper ihre Lage nicht. Deformationen treten
nur in der Berührungszone auf. Sonst bleibt der Körper starr.
• Es existiert ein Grenzwert des Zeitintegrals über k (B, t) :
(
Zτ
k (B, t) : resultierende Stoßkraft
S (τ ) := lim k (B, t) dt
mit
τ →0
S (τ )
: Stoßimpuls (Stoßantrieb)
0
• Die in der Berührungszone während des Stoßvorgangs auftretenden Kontaktkräfte
sind so groß, daß alle anderen am Körper auftretenden Kräfte dagegen vernachlässigt
werden können.
• Die Berührungsfläche sei eine Ebene, so daß die Stoßkraft k (B, t) nur in Richtung
der Stoßnormalen wirkt: → Vernachlässigung der Tangentialanteile beim Stoß.
• Die Stoßdauer kann in eine Kompressions- und eine Restitutionsphase zerlegt werden. Es folgt für den Stoßimpuls:
S (τ ) = SR + SK
Allgemeiner Stoß (teilelastisch): SR = e SK
Newtonsche Stoßhypothese mit 0 ≤ e ≤ 1 (Stoßkennziffer bzw. Stoßzahl)
(
1 → SR = SK : elastischer Stoß
Grenzfälle :
e=
0 → SR = 0
: plastischer Stoß
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
11.2
25
Ebener, zentraler Stoß
Gerader, zentraler Stoß:
Ba
Bb
e2
va
Ma
e2
Sb (τ ) Sa (τ )
e1
M
b
vb
e1
va′′ = va′ −
mb
(va′ − vb′ )(1 + e)
ma + mb
vb′′ = vb′ −
ma
(vb′ − va′ )(1 + e)
ma + mb
(·)′′ : Komponente nach dem Stoß
(·)′ : Komponente vor dem Stoß
Stoßbedingung:
e =
Energieverlust:
va′′ − vb′′
vb′ − va′
∆E =
1
2
ma mb
(va′ − vb′ )2 (1 − e2 )
ma + mb
Sonderfälle des geraden zentralen Stoßes:
elastischer Stoß: e = 1 → SR ≡ SK
2 mb
(v ′ − vb′ )
ma + mb a
2 ma
(v ′ − va′ )
vb′′ = vb′ −
ma + mb b
∆E = 0
va′′ = va′ −
plastischer Stoß: e = 0 → SR ≡ 0
ma va′ + mb vb′
=
=
ma + mb
m
mb
a
∆ E = 21
(va′ − vb′ )2
ma + mb
va′′
vb′′
Schiefer, zentraler Stoß:
vb′
Ba
Bb
va′
e2
Ma
e2
Sa (τ )
e1
Mb
Sb (τ )
′
α
β′
e1
′′
′
va1
= va1
−
mb
′
′
(va1
− vb1
)(1 + e)
ma + mb
′′
′
va2
= va2
′′
′
vb1
= vb1
−
ma
′
(v ′ − va1
)(1 + e)
ma + mb b1
′′
′
vb2
= vb2
Berührungsfläche
Stoßbedingung:
e =
Energieverlust:
′′
′′
va1
− vb1
′
′
− va1
vb1
∆E =
1
2
ma mb
′ 2
(v ′ − vb1
) (1 − e2 )
ma + mb a1
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Kinetik der starren Körper
11.3
26
Ebener, exzentrischer Stoß
Bem.: Beim exzentrischen Stoß müss neben den Impulsbilanzen bzgl. der Massenmittelpunkte von Ba und Bb auch die Drallbilanzen für beide Körper
ausgewertet werden.
Allgemeine
Berührungspunkt
Ba
e1 :
′
′
vM
vM
a
b
Ba :
e2 :
e2
e2
ωa′
′
e3 :
ω
e
1
b
xM a2
Ma
B
x
e
M b2
1
Mb
Sb (τ ) Sa (τ )
e1 :
Bb
Stoßnormale
e2 :
Bb :
Berührungsfläche
e3 :
mit
(
Sa (τ ) = −S(τ ) e1
Sb (τ ) =
S(τ ) e1
)
Gleichungen für:
′′
′
ma (vM
a1 − vM a1 ) = −S(τ )
′′
′
ma (vM
a2 − vM a2 ) = 0
θM a (ωa′′ − ωa′ ) = −xM a2 S(τ )
′′
′
mb (vM
b1 − vM b1 ) = S(τ )
′′
′
mb (vM
b2 − vM b2 ) = 0
θM b (ωb′′ − ωb′ ) = xM b2 S(τ )
keine Anteile in e2 -Richtung
Bemerkungen:
• Bei Lagerungen der Körper Ba und Bb sind Auflagerreaktionen (Impulsantriebe) infolge der Stoßimpulse Sa (τ ) und Sb (τ ) zu berücksichtigen.
• Bei Bezug der Drallbilanzen auf den momentanen Geschwindigkeitspol entfallen die
Impulsbilanzen, d. h. in der Drallbilanz muss ΘM durch ΘM V und xM 2 durch xM V 2
ersetzt werden.
• Oben genanntes Gleichungssystem enthält 6 Gleichungen für die 7 Unbekannten:
′′
′′
′′
′′
′′
′′
vM
a1 , vM a2 , ωa , vM b1 , vM b2 , ωb , S(τ ) → Zusatzgleichung wird benötigt.
• Entwicklung einer Zusatzgleichung in Anologie zur Stoßbedingung beim geraden zentralen Stoß.
e =
′′
′′
vBa1
− vBb1
′
′
− vBa1
vBb1
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Einführung in die Schwingungslehre
27
TEIL V: Einführung in die Schwingungslehre
12
Grundlagen und Voraussetzungen
12.1
Vorbemerkungen und Begriffe
Harmonische, periodische Schwingungen
x(t)
ωT
ωt
A sinβ
α
A
β
π
2
A
π
mit
α β
A cosβ
x(t) = A sin (ω t + β)
−→
x(t) = A cos (ω t − α)
3π
2
(
2π
5π
2
ωt
A
β : Voreilwinkel
α : Nacheilwinkel
x(t) = C1 sin (ω t) + C2 cos (ω t)
Zusammenstellung wichtiger Begriffe:
A
:
Schwingungsamplitude
ω
:
Kreisfrequenz
A = 12 (xmax − xmin )
π
α+β =
2
2π
T
: Schwingungsdauer (Periode)
T =
ω
1
ω
f
: Frequenz
f =
=
T
2π
Klassifikation von harmonischen Schwingungen:
α, β
:
Phasenwinkel
freie Schwingung
ungedämpft
c
erzwungene Schwingung
gedämpft
c
d
ungedämpft
gedämpft
u(t) F (t)
u(t) F (t)
c
c
d
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Einführung in die Schwingungslehre
12.2
28
Federsteifigkeiten und Federschaltungen
(a) Ersatzfedersteifigkeiten:
Dehnfedern:
Analogie:
Federgesetz:
F = cF f
1-Kraft“: F = 1
”
Vorgehen:
cF =
F
f
→ cF =
1
f
→
• Berechnung der Durchbiegung infolge einer Kraft F = 1
(z. B. mit Hilfe des PdvK)
• Berechnung der Federsteifigkeit cF
Drehfedern:
Analogie:
Federgesetz:
M = cD ϕ
1-Moment“: M = 1
”
Vorgehen:
→
cD =
M
ϕ
→
cD =
1
ϕ
• Berechnung der Durchbiegung infolge eines Moments M = 1
(z. B. mit Hilfe des PdvK)
• Berechnung der Federsteifigkeit cD
(b) Federschaltungen:
Reihenschaltung:
Parallelschaltung:
c1
c1
F
F
c2
c2
Kriterien der Parallelschaltung:
F = F1 + F2 (unterschiedliche Kraft)
f = f1 = f2 (gleicher Weg)
∗
Kriterien der Reihenschaltung:
F = F1 = F2 (gleiche Kraft)
f = f1 + f2 (unterschiedlicher Weg)
∗
c = c1 + c2
c =
c1 c2
c1 + c2
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Einführung in die Schwingungslehre
13
13.1
29
Freie Schwingungen mit einem Freiheitsgrad
Freie ungedämpfte Schwingung
• lineare Schwingung (Schwingungsdifferentialgleichung)
r
c
: Eigenkreisfrequenz
ω =
m
ẍ1 + ω 2 x1 = 0
mit
: Koordinate
x1
Lösung der normierten Schwingungsdifferentialgleichung
x(t) = C1 sin (ωt) + C2 cos (ωt)
Lösung mit der Berücksichtigung von Anfangsbedingungen
(
x0 : Anfangsauslenkung
v0
x(t) =
sin (ωt) + x0 cos (ωt)
mit
ω
v0 : Anfangsgeschwindigkeit
Schwingungsamplitude und Phasenwinkel
r
q
v0
A = C12 + C22 = ( )2 + x20
ω
C2
C2
x0 ω
tan β =
→
β = arctan
= arctan
C1
C1
v0
• Nichtlineare Schwingungen am Beispiel des mathematischen Pendels
A
Anwendung des Drallsatzes bezüglich A liefert:
ϕ
ϕ̈ + ω 2 sin ϕ = 0
l
m
mit
ω
=
r
g
l
mg
l sin ϕ
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Einführung in die Schwingungslehre
13.2
30
Freie gedämpfte Schwingung
• gedämpfter Einmassenschwinger
m
m
Stoffgesetze der Feder- und
Dämpferelemente :
x
c
cx
d
FF = c x
d ẋ
FD = d ẋ
r
c
: ungedämpfte Eigenkreisfrequenz
ω0 =
m
mit
d
D =
: Lehr sches Dämpfungsmaß
2 m ω0
ẍ + 2D ω0 ẋ + ω02 x = 0
Fall A: überkritische (starke) Dämpfung (D > 1)
x(t) = e−D ω0 t
mit
ν̄
= ω0
√
D2 − 1
v0 + D ω0 x0
sinh (ν̄ t) + x0 cosh (ν̄ t)
ν̄
: Kreisfrequenz der stark gedämpften Schwingung
Fall B: kritische Dämpfung (Aperiodischer Grenzfall) (D = 1)
x(t) = e−ω0 t [ x0 + (v0 + x0 ω0 ) t ]
Fall C: unterkritische (schwache) Dämpfung (D < 1)
−D ω0 t
x(t) = e
mit
ν
= ω0
v0 + D ω0 x0
sin (ν t) + x0 cos (ν t)
ν
√
1 − D2
: gedämpfte Kreisfrequenz
Alternative Darstellung der Lösung:
−D ω0 t
x(t) = A e
sin (ν t + β)
mit
A
β
=
=
s
2
v0 + D ω0 x0
+x20
ν
x0 ν
arctan
v0 + D ω0 x0
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Einführung in die Schwingungslehre
14
31
Erzwungene Schwingungen mit einem Freiheitsgrad
14.1
Erzwungene ungedämpfte Schwingung mit periodischer
Erregung
x
c
x
u(t)
m
c
F (t)
(1) krafterregtes System
m
(2) wegerregtes System
Aufstellung der Schwingungsdifferentialgleichungen (reibungsfrei)
(1) kraftregtes System:
m ẍ =
F (t) − c x
−→ m ẍ + c x = F (t)
(2) wegregtes System:
m ẍ =
−c (x − u(t)) −→ m ẍ + c x =
c u(t)
Bem.: Kraft- und Wegerregung führen auf denselben Typ Differentialgleichung mit
dem Störglied F (t) = c u(t). Das Störglied repräsentiert in jedem Fall eine
Erregerkraft.
Harmonische Erregung:
F (t) = F0 cos(Ωt)
mit
u(t)
= u0 cos(Ωt)
F0 , u0 : Erregeramplitude
Ω
: Erregerkreisfrequenz
Normierung der Schwingungsdifferentialgleichung.:
r
c
ω0 =
: Eigenkreisfrequenz
m
(
)
ẍ + ω02 x = a cos( Ω t)
mit
F
c
u
0
0
a=
: Amplitude der
;
m
m
Erregerbeschleunigung
Lösung der normierten Schwingungsdifferentialgleichung:
x(t) = xh (t) + xp (t)
mit
xh (t) : Lösung der homogenen Dgl.
x (t) : Partikulärlösung
p
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Einführung in die Schwingungslehre
32
(a) homogene Lösung:
Lösung der homogenen Schwingungsdifferentialgleichung gemäß 13.1.
(b) spezielle Lösung:
Bem.: Man wählt einen Ansatz in Abhängigkeit des Störglieds.
−→ xp (t) = A0 cos (Ωt)
mit
A0 : Amplitude der Partikularlösung
Einsetzen in die inhomogene Schwingungsdifferentialgleichung liefert die Vergrößerungsfunktion und die statische Amplitude.
Vergrößerungsfunktion und statische Amplitude:
A0 =
ω2
a
=: Va Astat.
− Ω2
;
η=
weiterhin gilt:
Astat. =
η
mit
Va
Astat.
14.2
a
ω2
1
Ω
→ Va =
ω0
1 − η2
:
Frequenzverhältnis
:
Vergrößerungsfunktion
:
stat. Auslenkung infolge der Erregeramplitude
Erzwungene gedämpfte Schwingung mit periodischer
Erregung
x
m
c
F (t) = F0 cos(Ωt)
d
Aufstellung der Schwingungsdifferentialgleichung:
m ẍ = F (t) − c x − d ẋ
−→
m ẍ + d ẋ + c x = F (t)
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Einführung in die Schwingungslehre
33
Normierung der Schwingungsdifferentialgleichung:
ẍ + 2 D ω0 ẋ + ω02 x = a cos(Ωt)
r
c
ω0 =
m
d
mit
D
=
2 m ω0
a = F0
m
: Eigenkreisfrequenz
: Lehr sches Dämpfungsmaß
: Amplitude der Erregerbeschleunigung
(a) homogene Lösung:
Lösung der homogenen Schwingungsdifferentialgleichung gemäß 13.2.
(b) spezielle Lösung:
Bem.: Man wählt einen Ansatz in Abhängigkeit des Störglieds.
−→ xp (t) = A0 cos (Ωt)
mit
A0 : Amplitude der Partikularlösung
Einsetzen in die inhomogene Schwingungsdifferentialgleichung liefert die Vergrößerungsfunktion und die statische Amplitude.
Amplitude der Partikularlösung und Vergrößerungsfunktion:
A0 = q
a
2 =: Va Astat.
2
2
2
ω0 − Ω + 2 D ω0 Ω
Es gilt für die Vergrößerungsfunktion
1
ω02
= p
Va = p 2
2
2
2
2
(1 − η )2 + 4 D 2 η 2
(ω0 − Ω ) + (2 D ω0 Ω)
Ω
η=ω
0
mit
a
Astat. = 2
ω0
:
Frequenzverhältnis
:
stat. Auslenkung infolge der Erregeramplitude
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik
Einführung in die Schwingungslehre
34
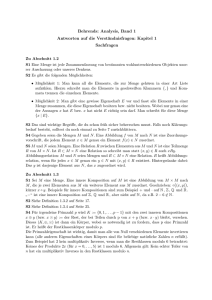
Vergrößerungsfunktion Va (Amplituden-Frequenzgang)
Va
D=0
D=0
0,2
2,5
Va (η) = q
2,0
(1 − η 2 )2 + 4 D 2 η 2 )
ungünstiges Frequenzverhältnis
√
ηex. = 1 − 2 D 2
0,3
1,5
1
zugehörige Vergrößerungsfunktion
0,4
Va =
1,0
1
2
0,5
√
1
√
2 D 1 − D2
0,6
2
1,0
2,0
0
0,4
0,8 1,0 1,2
1,6
2,0
η=
Ω
ω0
η=
Ω
ω0
2,4
Nacheilwinkel ϕ (Phasen-Frequenzgang)
ϕ
D=0
0,2
0,3
0,4
0,6
√
1
2
2
1,0
2,0
180◦
150◦
120◦
90◦
ϕ = arctan
60◦
30◦
0
0,4
0,8 1,0 1,2
1,6
2,0
2Dη
1 − η2
2,4
Institut für Mechanik (Bauwesen), Lehrstuhl für Kontinuumsmechanik