10 Lineare Zweipole und Zweitore
Werbung

Seite 206
GET-Skript
10 Lineare Zweipole und Zweitore
10.1 Grundüberlegung
Bisher: Beliebige Zusammenschaltung von R, L, C ;
individuelle Betrachtungsweise; keine für alle Schaltungen allgemeingültige Aussagen.
Hier: Nur zwei Klassen von Schaltungen betrachten;
allgemeine Betrachtungsweise durch allgemeine Kenngrößen;
damit für beide Klassen allgemeingültige Aussagen.
I
I1
U
I2
U1
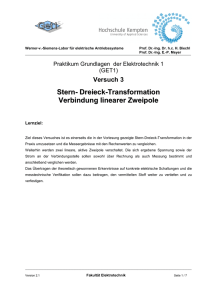
I
Eintor (Zweipol)
1 lineare Gleichung
U2
I3
I4
Zweitor (allgemein Vierpol)
2 lineare Gleichungen (Matrix)
Wie betrachten also die Zweipole (Eintore), die durch zwei Koeffizienten einer linearen Gleichung beschrieben sind und eine spezielle Klasse der Vierpole (die Zweitore), die durch die Koeffizientenmatrix eines Systems von zwei linearen Gleichungen
beschrieben werden. Alle weiteren Betrachtungen erfolgen für
- den quasistationären Zustand
- den eingeschwungenen Zustand und für
- lineare Zweipole bzw. Vierpole
Beispiele für Zweipole: Impedanzen, Ersatzspannungsquellen, Ersatzstromquellen
Beispiele für Vierpole: Spannungsteiler, Filter, Übertrager, Transformatoren usw.
Lineare Zweipole und Zweitore
Seite 207
10.2 Leistungsberechnung an linearen Zweipolen
Lineare Zweipole wurden bereits bei den Gleichstromschaltungen
behandelt. Bei Zweipolen im Wechselstromkreis gibt es lediglich
zur Leistungsberechnung einige Nachträge:
Passive Zweipole:
Es ist U L = U K = 0 , d.h. passive Zweipole werden beschrieben
durch U = Z ⋅ I oder I = Y ⋅ U , also durch eine einzige Konstante Z oder Y .
Bei physikalisch realisierbaren passiven Zweipolen, darf die Leistung P nicht negativ sein, also
1 *
*
P = --- ( I ⋅ U + U ⋅ I ) > 0
2
*
*
*
und mit U = Z ⋅ I bzw. U = Z ⋅ I wird
*
Z+Z
1 2
2
P = I ⋅ I ⋅ ---------------- = --- I ⋅ Re ( Z ) = I ⋅ Re ( Z ) ≥ 0
2
2
*
Für passive Zweipole ist also Re ( Z ) > 0 und damit auch
Re ( Y ) > 0
Aktive Zweipole:
Die aufgenommene Leistung ist
*
*
P = Re ( U ⋅ I ) = Re { ( U L + Z ⋅ I ) ⋅ I }
*
*
= Re { U L ⋅ I } + I ⋅ I ⋅ Re { Z }
P kann also je nach Größe von U , I positiv oder negativ werden.
Seite 208
GET-Skript
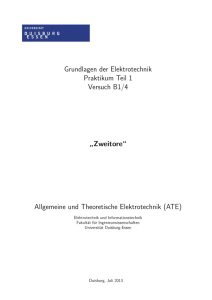
10.3 Leistungsanpassung bei Zweipolen
Die Leistungsabgabe von einem aktiven Zweipol an einen passiven Zweipol muß ebenfalls noch für den Wechselstromkreis untersucht werden.
Ia
Zi
Ul
Ua
Za
Dazu muß untersucht werden, wie die Leistung Pa an der Last
Z a = R a + jX a bei gegebenem Z i = R i + jX i von Ra und Xa abhängt. Allgemein war
2
2
P a = I a ⋅ R a = I a ⋅ Re ( Z a ) wobei
UL
UL
- = ------------------------------------------------- und
I a = ---------------Zi + Za
Ra + Ri + j ( X a + X i )
2
Ia
2
UL
= --------------------------------------------------------.
2
2
( Ra + Ri ) + ( X a + X i )
Somit ist also
1
2
P a = U L ⋅ --------------------------------------------------------------------1
2
2
------ [ ( R i + R a ) + ( X i + X a ) ]
Ra
Leistungsanpassung heißt: die von Z a aufgenommene Leistung
soll ein Maximum sein.
∂P
∂P
also: --------a- = 0 und --------a- = 0
∂R a
∂X a
Da die Variablen Ra und Xa nur im Nenner vorkommen, genügt es,
dessen Ableitung nach Ra und Xa zu bilden und die Nullstellen zu
suchen.
Lineare Zweipole und Zweitore
Seite 209
2
2
( Xi + Xa)
Ri
∂ 1
2
2
------ [ ( R i + R a ) + ( X i + X a ) ] = 1 – -------2 – ------------------------=0
2
∂ Ra Ra
R
R
a
a
2( X i + X a)
∂ 1
2
2
------ [ ( R i + R a ) + ( X i + X a ) ] = -------------------------=0
Ra
∂ X a Ra
Beide Ableitungen werden gleichzeitig Null für X a = – X i und
R i = R a . Damit erfolgt Leistungsanpassung bei Z a = Z i* und
die Leistung wird dann
2
P max
1 Ue
= --- -----------4 Ra
10.4 Beschreibung von Vierpolen durch Matrizen
I1
U1
U4
I2
U2
Schaltung
I3
U3
I4
An dem gezeigten Vierpol sind zugänglich:
- 4 Klemmenspannungen
- 4 Klemmenströme
und es gilt nach den Kirchhoff‘schen Regeln
I1 + I2 – I3 – I4 = 0
U1 + U4 – U2 – U3 = 0
Von diesem allgemeinen Fall des Vierpols unterscheidet man den
Spezialfall Zweitor. Als Tore bezeichnet man Klemmenpaare, bei
denen der einfließende und ausfließende Strom gleich ist.
In den beiden „Toren“ ist also I 1 = I 3 und I 2 = I 4 .
Seite 210
GET-Skript
Das gilt immer wenn Vierpol Zwischenglied zwischen Sender und
Empfänger ist, also z. B.
Zweitor
aktiv
passiv
Ab jetzt sollen ausschließlich Zweitore betrachtet werden, die wie
bereits vereinbart linear und passiv sein sollen.
Dann gilt allgemein:
a 11 U 1 + a 12 U 2 + b 11 I 1 + b 12 I 2 = 0
a 21 U 1 + a 22 U 2 + b 21 I 1 + b 22 I 2 = 0
und es muß entweder
a 11 a 12
≠ 0 oder
a 21 a 22
b 11 b 12
≠ 0 sein.
b 21 b 22
Mit det a nn ≠ 0 kann man nach U 1 bzw. U 2 auflösen und erhält
die Beschreibung durch dieWiderstandsmatrix.
10.4.1 Die Widerstandsmatrix
U 1 = Z 11 I 1 + Z 12 I 2
U 2 = Z 21 I 1 + Z 22 I 2
oder
U 1
Z 11 Z 12 I 1
=
⋅
U 2
Z 21 Z 22 I 2
und mit den Spaltenmatrizen von Spannung und Strom
U 1
I 1
[ U ] = und [ I ] =
U 2
I 2
lautet die Beschreibung des Zweitors
[U ] = [Z ] ⋅ [I ]
Lineare Zweipole und Zweitore
Dabei ist [ Z ] =
Z 11 Z 12
Z 21 Z 22
die Widerstandsmatrix des Zweitores.
Die Elemente Z nn der Widerstandsmatrix haben die Dimension
einer Impedanz. Bei der Betrachtung eines Zweitors als „black
box“ müssen diese Elemente durch Messungen an den Klemmen
bestimmbar sein.
Messung der Widerstandsmatrix [ Z ]
Zur Bestimmung der vier Elemente Z mn der Widerstandsmatrix
sind vier Messungen erforderlich. Am einfachsten wählt man folgende Leerlauf-Fälle
I2 = 0 :
Z 11 = U 1 ⁄ I 1 = Z 1l
Z 1l am Tor 1 bei leerlaufendem Tor 2 gemessene Impedanz
= Eingangs-Leerlaufimpedanz.
I1 = 0 :
Z 22 = U 2 ⁄ I 2 = Z 2l
Z 2l am Tor 2 bei leerlaufendem Tor 1 gemessene Impedanz
= Ausgangs-Leerlaufimpedanz.
I2 = 0 :
Z 21 = U 2 ⁄ I 1
Z 21 Quotient aus Leerlaufspannung an Tor 2 und
Strom an Tor 1
= Leerlauf-Kernimpedanz vorwärts.
I1 = 0 :
Z 12 = U 1 ⁄ I 2
Z 12 Quotient aus Leerlaufspannung an Tor 1 uns
Strom an Tor 2
= Leerlauf-Kernimpedanz rückwärts.
Z 12, Z 21 bilden ein Maß für die Kopplung zwischen Tor 1 und Tor
2.
Z 12 = Z 21 bedeutet: das Zweitor ist kopplungssymmetrisch oder
übertragungssymmetrisch.
Z 11 = Z 22 bedeutet: das Zweitor ist widerstandssymmetrisch.
Seite 211
Seite 212
GET-Skript
Beispiel 1:
I1
U1
U 1 = R( I 1 + I 2)
I2
U2
R
also Z = RR
RR
U 2 = R( I 1 + I 2)
Beispiel 2:
I1
U1
I2
R1
U 1 = R1 I 1
also
Z =
U 2 = R2 I 2
R2
U2
R1 0
0R 2
10.4.2 Die Leitwertmatrix
Bei Auflösung der beiden linearen Gleichungen nach I 1 bzw. I 2
erhält man
I 1 = Y 11 ⋅ U 1 + Y 12 U 2 oder
I 2 = Y 11 ⋅ U 1 + Y 22 U 2
I 1
Y 11 Y 12 U 1
=
⋅ bzw. [ I ] = [ Y ] [ U ]
I 2
Y 21 Y 22 U 2
Y 11 Y 12
Dabei ist [ Y ] =
die Leitwertmatrix des Zweitors mit
Y 21 Y 22
Dimension einer Admittanz.
Lineare Zweipole und Zweitore
Messung der Leitwertmatrix
Es sind vier Messungen erforderlich, am einfachsten für folgende
Kurzschluß-Fälle.
U2 = 0 :
Y 11 = I 1 ⁄ U 1 = Y 1k
Y 1k am Tor 1 bei kurzgeschlossenem Tor 2 gemessene Admittanz
= Eingangs-Kurzschlußadmittanz.
U1 = 0 :
Y 22 = I 2 ⁄ U 2 = Y 2k
Y 2k am Tor 2 bei kurzgeschlossenem Tor 1 gemessene Admittanz
= Ausgangs-Kurschlußadmittanz.
U2 = 0 :
Y 21 = I 2 ⁄ U 1
Y 21 Quotient aus Kurzschlußstrom an Tor 2 und Spannung an Tor 1
= Kurzschluß-Kernadmittanz vorwärts.
U1 = 0 :
Y 12 = I 1 ⁄ U 2
Y 12 Quotient aus Kurzschlußstrom an Tor 1 und Spannung an Tor 2
= Kurzschluß-Kernadmittanz rückwärts.
Y 12, Y 21 bilden ein Maß für die Kopplung zwischen Tor 1 und Tor
2.
Y 12 = Y 21 heißt: Zweitor ist kopplungssymmetrisch oder übertragungssymmetrisch.
Y 11 = Y 22 heißt: Zweitor ist widerstandssymmetrisch.
Seite 213
Seite 214
GET-Skript
Beispiel 1:
I1
I2
G
U1
I 1 = G(U 1 – U 2)
U2
also Y = G – G
–G G
I 2 = G(U 2 – U 1)
Beispiel 2:
I1
U1
I2
G1
U2
G2
I 1 = G1 U 1
also Y =
I 2 = G2 U 2
G1 0
0 G2
10.4.3 Die Kettenmatrix
Bei Auflösung der linearen Gleichungen nach
U 1 abhängig von U 2, – I 2 und nach I 1 abhängig von U 2, – I 2 erhält man
U 1 = A 11 U 2 + A 12 ⋅ ( – I 2 ) oder
I 1 = A 21 U 2 + A 22 ⋅ ( – I 2 )
U 1
A 11 A 12 U 2
U 2
=
= [ A] ⋅
I1
A 21 A 22 – I 2
– I 2
Lineare Zweipole und Zweitore
Seite 215
[ A ] wird verwendet bei der Berechnung von Kettenschaltung von
Zweitoren und heißt daher Kettenmatrix. Die Elemente von [ A ]
haben unterschiedliche Dimension. Bei der Verkettung von
Zweitoren ist der Ausgangsstrom – I 2 des ersten Zweitors gleich
dem Eingangsstrom I' 1 des folgenden (siehe Bild) und deshalb ist
es vorteilhaft, U 1 und I 1 abhängig von U 2, – I 2 zu beschreiben.
– I' 2 = I'' 1
I 1 I' 1
U1
U' 1 [ A' ]
U' 2= U'' 1 [ A'' ]
– I'' 2
=
I''' 1
– I''' 2– I 2
U'' 2= U''' 1 [ A''' ] U''' 2 U 2
[ A' ]
Messung der Elemente der Kettenmatrix
Es sind wieder vier Messungen erforderlich. Sind jedoch die Elemente von [ Y ] und [ Z ] bereits bekannt, so ist
A 12 = – 1 ⁄ Y 21
A 21 = 1 ⁄ Z 21
ebenfalls bekannt. A 11 und A 22 ergeben sich dann aus folgenden
Messungen:
I2 = 0 :
A 11 = U 1 ⁄ U 2
A 11 = Leerlauf-Spannungsübersetzung vorwärts.
U2 = 0 :
A 22 = I 1 ⁄ ( – I 2 )
A 22 = Kurzschluß-Stromübersetzung vorwärts.
Seite 216
GET-Skript
Beispiel 1:
I1
I2
G
U1
U2
1
U 1 = 1 ⋅ U 2 + ---- ( – I 2 )
G
also [ A ] = 1 1 ⁄ G
0 1
I 1 = 0 ⋅ U 2 + 1 ⋅ ( –I 2 )
Beispiel 2:
I1
U1
U 1 = 1 ⋅ U 2 + 0 ⋅ ( –I 2 )
I 1 = U 2 ⁄ R + 1 ⋅ ( –I 2 )
I2
R
U2
also [ A ] = 1 0
1⁄R 1
10.4.4 Die Reihen-Parallelmatrix
Auflösung der Gleichungen nach U 1 und nach I 2 abhängig von
I 1, U 2
U 1 = H 11 I 1 + H 12 U 2
I 2 = H 21 I 1 + H 22 U 2
oder
U 1
H 11 H 12 I 1
I1
=
⋅ = [H ] ⋅
I2
H 21 H 22 U 2
U 2
[ H ] wird verwendet bei der Beschreibung von Reihen-Parallelschaltung von Zweitoren und heißt deshalb Reihen-Parallel-Matrix.
Lineare Zweipole und Zweitore
Seite 217
Beispiel:
[H ]
[ H' ]
[ H'' ]
[ H ] läßt sich leicht durch [ H' ] und [ H'' ] ausdrücken.
10.4.5 Die Parallel-Reihenmatrix
Auflösung der Gleichungen nach [ I 1 ] und [ U 2 ] in Abhängigkeit
von [ I 2 ] und [ U 1 ] ergibt
I 1 = P 11 U 1 + P 12 I 2 oder
I1
P 11 P 12 U 1
U 1
=
=
(
P
)
U 2
P 21 P 22 I 2
I2
U 2 = P 21 U 1 + P 22 I 2
[ P ] wird verwendet bei der Beschreibung von Parallel-Reihenschaltungen von Zweitoren und heißt deshalb Parallel-ReihenMatrix.
Beispiel:
[P]
[ P' ]
[ P'' ]
[ P ] läßt sich leicht durch [ P′ ] und [ P′′ ] ausdrücken.
Seite 218
GET-Skript
10.4.6 Umrechnung der Matrizen [ Z ], [ Y ], [ A ], [ H ] und [ P ]
Bei Kettenmatrix [ A ] wurden nur zwei Elemente gemessen, zwei
weitere durch Elemente von [ Y ] bzw. [ Z ] dargestellt. Bei [ H ]
und [ P ] wurde keine Meßvorschrift genannt. Aber eine Meßvorschrift genügt, weil alle Matrizen ineinander umgerechnet werden
können.
Denn: Alle Matrizen beschreiben die Zweitoreigenschaften
gleichwertig. (Ein Gleichungssystem wurde nach verschiedenen
Variablen aufgelöst!)
Zur Umrechnung siehe Hilfsblatt oder [Bosse III, S. 73]
Wegen der Gleichwertigkeit der Matrizen läßt sich auch die Kopplungssymmetrie auf verschiedene Weise gleichwertig beschreiben:
Z 12 = Z 21 ; Y 12 = Y 21
H 12 = – H 21 ; P 12 = – P 21
det ( A ) = 1
und ähnliche gleichwertige Bedingungen erhält man für die Widerstandssymmetrie
Z 11 = Z 22 ; Y 11 = Y 22
det ( H ) = 1 ; det ( P ) = 1
A 11 = A 22 ,
Einige Umrechnungen (Hilfsblatt) ergeben sich durch Berechnung
der Kehrmatrix.
Lineare Zweipole und Zweitore
Seite 219
Beispiel:
[ U ] = [ Z ] ⋅ [ I ] von links ⋅ [ Z ]
[Z ]
–1
⋅ [U ] = [Z ]
–1
weil aber auch
–1
[Z ] = [Y ]
–1
⋅ [Z ] ⋅ [I ] = [I ]
[Y ] ⋅ [U ] = [I ] →
[Y ] = [Z ]
–1
und
–1
kann wie folgt berechnet werden (vgl. Hilfsblatt und
[Z ]
Mathe):
[Z ]
–1
Z 22 – Z 12
1
= ----------------- ⋅
det ( Z ) – Z
21 Z 11
Ähnlich erhält man
[H ] = [P]
–1
und [ P ] = [ H ]
–1
–1
Bedeutung von [ A ] :
U1
I1
= A ⋅
U2
–I 2
→
–1
A
U1
I1
=
U2
–I 2
–1
d.h. [ A ] beschreibt Verhalten des Zweitores in umgekehrter Betriebsrichtung.
Davon zu unterscheiden ist das „umgedrehte“ Zweitor.
Normale Betriebsrichtung, aber Tor 1 mit Tor 2 vertauscht:
Also
U2
abhängig von
U1
I2
–I 1
mern 1 → 2 bzw. 2 → 1
U2
–I 2
= A
–1
U1
I1
und Vertauschung der Tor-Num-
Seite 220
GET-Skript
U2
–I 2
U2
I2
U1
I1
A – A 12 U 1
1
= ----------------- 22
det ( A ) – A
I1
21 A 11
(2. Spalte und 2. Zeile
jeweils ⋅ ( – 1 ) )
U1
A A
1
= ----------------- 22 12
(jetzt 1 → 2 ; 2 → 1 )
det ( A ) A A
21 11 – I 1
1
= ----------------- ⋅ A
det [ A ]
t
U2
–I 2
wobei A
t
= transponierte Matrix
D. h. bis auf Vorzeichen bei A 12 und A 21 sind sowohl die umgekehrte Betriebsrichtung als auch das umgedrehte Zweitor durch die
–t
gleiche Matrix [ A ] beschrieben.
Im Spezialfall einer kopplungssymmetrischen Kettenmatrix [ A ]
ist
det [ A ] = A 11 A 22 – A 12 A 21 = 1
Dann bedeutet „Umdrehen“ des Zweitores Transponieren also
Vertauschen von A 11 und A 22 der Matrix [ A ] .
Lineare Zweipole und Zweitore
Seite 221
10.5 Zusammenschaltung von Zweitoren
10.5.1 Reihenschaltung
Reihenschaltung von Zweitoren heißt: sowohl Eingangstore als
Ausgangstore der Zweipole in Reihe. Dann ist
I1
I' 1
I' 2
U' 1 [ Z' ]
U1
I'' 1
I2
U' 2
I'' 2
U2
U'' 1 [ Z'' ] U'' 2
[Z ]
U 1 = U' 1 + U'' 1 und U 2 = U' 2 + U'' 2
I 1 = I' 1 = I'' 1 und I 2 = I' 2 = I'' 2
Alle Ströme sind bekannt. Deshalb Bestimmung von U aus
[U ] = [Z ] ⋅ [I ]
Gegeben:
U' = Z' ⋅ I' = Z' ⋅ I und
U'' = Z'' ⋅ I'' = Z'' ⋅ I
Aber weil U = U' + U'' , ist
U = Z' ⋅ I + Z'' ⋅ I = Z' + Z'' ⋅ I
Durch Vergleich mit dem Gesamtzweitor U = Z ⋅ I ergibt
sich
Z = Z' + Z'' oder Z =
Z' 11 + Z'' 11 Z' 12 + Z'' 12
Z' 21 + Z'' 21 Z' 22 + Z'' 22
Bei Reihenschaltung von Zweitoren addieren sich die Z -Matrizen
der beteiligten Zweitore zur Z -Matrix des Gesamt-Zweitors
Seite 222
GET-Skript
10.5.2 Parallelschaltung
Parallelschaltung von Zweitoren heißt: sowohl die Eigangstore als
die Ausgangstore der beteiligten Zweitore sind parallel geschaltet.
Dann ist:
I' 1
I' 2
I1
U1
U' 1 [ Y' ] U' 2
I'' 1
I2
U2
I'' 2
U'' 1 [ Y'' ] U'' 2
[Y ]
I 1 = I' 1 + I'' 1 und I 2 = I' 2 + I'' 2
U 1 = U' 1 = U'' 1 und U 2 = U' 2 = U'' 2
Alle
Spannungen
I = Y ⋅ U .
sind
bekannt,
deshalb
auflösen
nach
Gegeben ist:
I' = Y' ⋅ U' = Y' ⋅ U und
I'' = Y'' ⋅ U'' = Y'' ⋅ U
aber weil
I = I' + I'' ist
I = Y' ⋅ U + Y'' ⋅ U = Y' + Y'' ⋅ U
Durch Vergleich mit der Gleichung für das Gesamtzweitor
I = Y ⋅ U ergibt sich
Y = Y' + Y'' oder Y =
Y 11 + Y'' 11 Y' 12 + Y'' 12
Y' 21 + Y'' 21 Y' 22 + Y'' 22
Bei Parallelschaltung von Zweitoren addieren sich die Y -Matrizen der beteiligten Zweitore zur Y -Matrix des Gesamtzweitors.
Lineare Zweipole und Zweitore
Seite 223
10.5.3 Reihen-Parallelschaltung
Reihen-Parallelschaltung bei Zweitoren heißt: die Eigangstore
sind in Reihe, die Ausgangstore sind parallel geschaltet. dann ist:
I1
I' 1
I' 2
U' 1 [ H' ] U' 2
U1
I2
U2
I'' 2
I'' 1
U'' 1 [ H'' ] U'' 2
[H ]
U 1 = U' 1 + U'' 1 und I 2 = I' 2 + I'' 2
I 1 = I' 1 = I'' 1 und U 2 = U' 2 = U'' 2
oder vektoriell geschrieben
U1
=
I2
U' 1
U'' 1
+
I' 2
und
I1
I' 1
=
U2
I'' 2
+
U' 2
I'' 1
U'' 2
Alle Eingangsströme und Ausgangsspannungen bekannt, deshalb
Auflösung des Gleichungssystems nach Eingangsspannungen und
Ausgangsströmen:
U' 1
I' 2
U'' 1
I'' 2
= H' ⋅
= H'' ⋅
Weil aber
U1
I' 1
U' 2
I'' 1
I' 2
I2
U1
I2
= H' ⋅
U' 1
I1
U2
+
und
U2
I1
= H'' ⋅
U'' 2
=
I1
= H' ⋅
U'' 1
U2
, ergibt sich
I'' 2
+ H'' ⋅
I1
U2
I
= H' + H'' ⋅ 1
U2
Seite 224
GET-Skript
Durch Vergleich mit der Gleichung für das Gesamtzweitor
U1
I
= H ⋅ 1 erhält man
U2
I2
H = H' + H'' oder H =
H' 11 + H'' 11 H' 12 + H'' 12
H' 21 + H'' 21 H' 22 + H'' 22
Bei Reihen-Parallelschaltung addieren sich die H -Matrizen der
beteiligten Zweitore.
10.5.4 Parallel-Reihenschaltung
Parallel-Reihenschaltung von Zweitoren heißt: die Eingangstore
sind parallel, die Ausgangstore in Reihe geschaltet. Die Betrachtungen erfolgen analog zu 10.5.3, mit dem Ergebnis
P =
P' 11 + P'' 11 P' 12 + P'' 12
P' 21 + P'' 21 P' 22 + P'' 22
Es addieren sich die [ P ] -Matrizen der beteiligten Zweitore.
10.5.5 Kettenschaltung
Kettenschaltung von Zweitoren heißt: das Ausgangstor des ersten
Zweitors ist mit dem Eingangstor des zweiten verbunden. Dann
gilt:
I 1 I' 1
U1
U' 1
– I' 2 I'' 1
[ A' ]
U' 2 U'' 1
– I'' 2 – I 2
[ A'' ]
U'' 2
[ A]
U' 2 = U'' 1 und – I' 2 = I' 1
oder in vektorieller Schreibweise
U' 2
– I' 2
=
U'' 1
I'' 1
U2
Lineare Zweipole und Zweitore
Seite 225
Gegeben ist für beide Zweitore
U' 1
I' 1
U1
= A' ⋅
=
I1
U' 1
I' 1
U' 2
und
U'' 1
– I' 2
I'' 2
= A' ⋅ A'' ⋅
= A'' ⋅
U'' 2
– I'' 2
U'' 2
, also
– I'' 2
= A' ⋅ A'' ⋅
U2
–I 2
Durch Vergleich mit der Gleichung für das Gesamtzweitor ergibt
sich
A = A' ⋅ A'' (Achtung! Reihenfolge)
Bei Kettenschaltung berechnet sich die [ A ] -Matrix des Gesamtzweitors durch Multiplikation der [ A ] -Matrizen der Teilschaltungen in der Reihenfolge der Tore.
10.5.6 Beispiele und Anwendungsgrenzen
Beispiel:
Bekannt ist:
R1
mit Z' =
R2
R1 0
0 R2
und
R
mit Z'' = R R
R R
Seite 226
GET-Skript
Bei Reihenschaltung der beiden Zweitore ergibt sich
R1
[Z ]
R2
R1
oder
R2
R
R
beschrieben durch die Matrix
[ Z ] = [ Z' ] + [ Z'' ] =
R1 + R
R
R
R2 + R
[ Z ] beschreibt das häufig verwendete T-Glied.
Beispiel:
Bekannt ist:
G
mit [ Y' ] =
G –G
–G G
und
G1
mit [ Y'' ] =
G1 0
0 G
G2
Lineare Zweipole und Zweitore
Seite 227
Durch Parallelschaltung ergibt sich
G
G
oder
G1
G1
G2
G2
beschrieben durch die Matrix
[ Y ] = [ Y' ] + [ Y'' ] =
G1 + G
–G
–G
G2 + G
[ Y ] beschreibt das häufig verwendete π -Glied.
Beachte:
Diese Regeln für Zusammenschaltung gelten unter
Annahme, daß die Teilzweitore auch nach Zusammenschaltung Zweitore bleiben, daß also
I' 1 = I' 3 ; I' 2 = I' 4 ; I'' 1 = I'' 3 ; I'' 2 = I'' 4 ist.
Das ist nur bei der Kettenschaltung selbstverständlich. Bei allen
anderen Zusammenschaltungen muß geprüft werden, ob die
Zweitorbedingungen für kein Teilzweitor verletzt werden.
Allgemeines Prüfkriterium:
Keine Kreisströme bei mindestens zwei beliebigen Betriebsbedinungen. Wegen Linearität gibt es dann unter keiner Bedingung
Kreisströme.
Beispiel: Reihenschaltung
I1
I2 = 0
I
U1
I
I1
I2 = 0
Seite 228
GET-Skript
Prüfung rechts: Ist im Leerlauf der Kreisstrom I = 0 ?
I1 = 0
I2
I
U2
I
I1 = 0
I2
Prüfung links: Ist im Leerlauf Kreisstrom I = 0 ?
Beispiel: Parallelschaltung
I
U1
I
Prüfung rechts: Ist im Kurzschluß I = 0 ? Ähnlich Prüfung links
auf I = 0 im Kurzschluß.
10.6 Der Übertrager (Transformator)
10.6.1 Beschreibung durch [ Z ] und [ A ]
Beschreibung des Transformators als Zweitor
i1
u1
di 2
di
u 1 = L 1 ------1- + M ------- und
dt
dt
di 2
di
u 2 = M ------1- + L 2 ------dt
dt
i2
u2
Lineare Zweipole und Zweitore
Seite 229
Die entsprechenden komplexen Amplituden bei sinusförmigen
Strömen und Spannungen sind dann
U 1 = jωL 1 I 1 + jωM I 2
U 2 = jωM I 1 + jωL 2 I 2
oder als Zweitor beschrieben:
U1
=
U2
jωL 1 jωM
jωM jωL 2
⋅
I1
I2
= Z ⋅
I1
I2
[ Z ] ist Widerstandsmatrix des verlustfreien Übertragers.
Bei dem verlustfreien Übertrager geht man von der Annahme aus,
daß der magnetische Fluß zum Strom proportional ist und daß die
Wicklung keinen ohm‘schen Widerstand aufweist, also φ ∼ i und
R ( Wicklung ) = 0 .
Da der Übertrager häufig mit anderen Zweipolen oder Zweitoren
verkettet ist, interessiert auch die Kettenmatrix [ A ] . Mit dem
Hilfsblatt ergibt sich [ A ] aus [ Z ] zu
A =
L 1 ⁄ M jω ( L 1 ⋅ L 2 ⁄ M – M )
L2 ⁄ M
1 ⁄ jωM
In Kapitel 7.4.2 "Energie mehrerer (gekoppelter) Spulen" war definiert:
M = k ⋅ L 1 L 2 mit 0 ≤ k ≤ 1 , wobei gegolten hatte
- kleiner gemeinsamer Fluß (lose Kopplung): k ≈ 0
- großer gemeinsamer Fluß (feste Kopplung): k ≈ 1 .
Der Koppelfaktor k beschreibt also, ob das Streufeld, das die jeweils andere Spule nicht durchsetzt, groß oder klein ist. Dieses
Streufeld beschreibt man oft auch mit dem Streufaktor σ
2
2
σ = 1 – k = 1 – M ⁄ ( L 1 L 2 ) und es gilt
- kleine Streufelder: σ ≈ 0
- große Streufelder: σ ≈ 1
In der Kettenmatrix wird häufig M durch den Streufaktor σ bzw.
Seite 230
GET-Skript
die Koppelkonstante k ersetzt und man schreibt
[ A] =
L 1 ⁄ M jωσL 1 L 2 ⁄ M
L2 ⁄ M
1 ⁄ jωM
1
= --- ⋅
k
L1 ⁄ L2
jωσ L 1 L 2
1 ⁄ jω L 1 L 2
L2 ⁄ L1
Mit σ → 0 , d. h. für einen idealen Übertrager ohne Streuung wird
k = 1 . Weiterhin nimmt man an, daß beim idealenÜbertrager die
Induktivitäten L 1 und L 2 zwar gegen Unendlich gehen, daß dabei
aber das Verhältnis L 1 ⁄ L 2 = ü , konstant bleibt. Dann erhält
man
[ A ] ideal =
L1 ⁄ L2
L2 ⁄ L1
0
Man nennt ü =
tragers.
0
= ü 0
0 1ڟ
L 1 ⁄ L 2 das Übersetzungsverhältnis des Über-
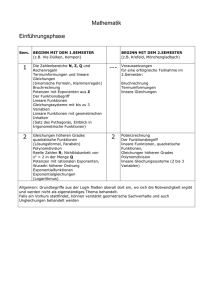
10.6.2 Ersatzschaltbild des verlustfreien Übertragers
Das einfachste Ersatzschaltbild, das einen Übertragers beschreibt,
ist ein T -Glied.
I2
I1
U1
L1-M
L2-M
M
U2
Man sieht anschaulich die Verkopplung der Primär - und Sekundärspule über die mittlere Spule mit Induktivität M . Der Nachteil
bei diesem sehr einfachen Ersatzschaltbild besteht darin, daß nicht
alle Betriebszustände beschrieben werden, bzw. daß es Betriebszustände gibt, bei denen Induktivitäten der Ersatzschaltung negativ würden. Dieses Ersatzschaltbild ist also nur brauchbar unter der
Einschränkung, daß L 1 – M > 0 , L 2 – M > 0 und M > 0 .
Lineare Zweipole und Zweitore
Nun ist
L1 – M =
Seite 231
L1 ⋅ L1 – L1 L2 ⋅ k =
L 1 ( L 1 – L 2 ⋅ k ) , also
2
L 1 – M > 0 nur für L 1 > L 2 ⋅ k und ähnlich
L 2 – M > 0 nur für L 2 > L 1 ⋅ k
2
Außerdem würde dieses Ersatzschaltbild das Umpolen einer
Wicklung nicht beschreiben, weil dazu M negativ werden müßte.
Ausweg:
Das Ersatzschaltbild wird derart ergänzt, daß die obigen Bedingungen erfüllt sind.
Neues Ersatzschaltbild
Reale Eigenschaften
des Übertragers
Überstz./Umpolen
durch ideal. Übertr.
oder
I1
ü2L2-üM
L1-üM
U1
U2
üM
[ A' ]
I2
ü/1
[ A'' ]
[A]
Für die Verkettung des Ersatzschaltbildes mit dem idealen Übertrager gilt
[ A ] = [ A' ] ⋅ [ A'' ] von rechts ⋅ [ A'' ]
[ A' ] = [ A ] ⋅ [ A'' ]
–1
–1
–1
Mit [ A'' ] = ü 0 und [ A'' ] = 1 ⁄ ü 0 wird
0 ü
0 1ڟ
[ A' ] =
L1 ⁄ M
jωσL 1 L 2 ⁄ M
1 ⁄ ( jωM )
L2 ⁄ M
⋅ 1⁄ü 0
0 ü
2
=
L 1 ⁄ ( üM ) jωσL 1 ( ü L 2 ) ⁄ ( üM )
1 ⁄ jω ( üM )
2
( ü L 2 ) ⁄ ( üM )
Seite 232
GET-Skript
Vergleicht man [ A' ] mit [ A ] , so sieht man, daß M durch ( ü ⋅ M )
2
und L 2 durch ( ü ⋅ L 2 ) ersetzt ist. Gegenüber dem ursprünglichen Schaltbild haben sich also die Induktivitäten in Abhängigkeit
vom Übersetzungsverhältnis ü des idealen Übertragers geändert.
L1-üM
ü2L2-üM
üM
[ A' ]
Man kann also die realen Eigenschaften wie vorher mit einem T Glied und den Induktivitäten L 1, L 2 und M des gegebenen Übertragers beschreiben, nun aber im idealen Übertrager ü so anpassen,
daß keine der Induktivitäten im T -Glied negativ wird. Man wählt
ü also so, daß
2
L 1 – üM ≥ 0 , ü L 2 – üM ≥ 0 und üM ≥ 0 bleiben und ü das Vorzeichen von M hat.
Diese drei Ungleichungen lassen sich zusammenfassen zur Bedingung
M ⁄ L2 ≤ ü ≤ L1 ⁄ M
Zwischen den obigen Grenzen kann nun ü beliebige Werte annehmen. Besonders gebräuchlich sind aber folgende drei Festlegungen von ü.
1. Spezialfall: L 1 – üM = 0 :
d. h. die linke Längsspule verschwindet. Es wird
L1 ⋅ L1 ⋅ L2
- =
ü = L 1 ⁄ M = -------------------------------------L2 ⋅ M
L1 L2
L
-----1 ⋅ ---------------M
L2
2
und mit 1 – σ = M ⁄ ( L 1 L 2 ) → wird
das Übersetzungsverhältnis ü =
L
1
-----1 ⋅ ---------------L2 1 – σ
Somit wird die Querspule üM = L 1 und
die rechte Längsspule wird
2
L1 L2
σ
2
ü L 2 – üM = ------------- – L 1 = L 1 ( ( L 1 L 2 ) ⁄ M – 1 ) = L 1 -----------2
1–σ
M
2
Lineare Zweipole und Zweitore
Seite 233
Man nennt dieses spezielle Ersatzschaltbild : Γ -Ersatzschaltbild
L1
σ
L 1 ⋅ -----------1–σ
ü
--- =
1
L L1 L2
-----1 ---------------L2 M
2. Spezialfall: L – üM = ü 2 L – üM
1
2
2
Dann wird L 1 = ü L 2 und das
Übersetzungsverhältnis ü =
L1 ⁄ L2
Die Induktivitäten der Längsspulen sind dann gleich und betragen
L 1 ⁄ L 2 ⋅ M
M
L 1 – üM = L 1 1 – ---------------------------- = L 1 1 – ----------------
L1
L1 L2
2
oder mit σ = ( 1 + M ⁄ ( L 1 L 2 ) )
L 1 – üM = L 1 ( 1 – 1 – σ )
Die Induktivität der Querspule ist
L1 ⁄ L2 ⋅ M ⋅ L1
L1 M
üM = --------------------------------------- = --------------- oder
L1
L1 L2
üM = L 1 1 – σ
Man nennt dieses spezielle Ersatzschaltbild T -Ersatzschaltbild
L1 ( 1 – 1 – σ )
L1 ( 1 – 1 – σ )
L1 1 – σ
ü⁄1 =
L1 ⁄ L2
Seite 234
GET-Skript
2
3. Spezialfall: ü L 2 – üM = 0
d.h. die rechte Längsspule verschwindet.
Dann wird
M
ü = ----- =
L2
L M
-----1 ---------------- =
L2 L L
1 2
L
-----1 ⋅ 1 – σ
L2
und die linke Längsspule
2
M
L 1 – üM = L 1 1 – ------------ = L 1 σ
L 1 L 2
sowie die Querspule
2
M
M ⋅ M L1
---------------------------- = L1 ( 1 – σ )
⋅
üM =
= L1
L1
L1 L2
L2
L
Man nennt diese Schaltung
-Ersatzschaltbild des Übertragers.
L1 σ
L1 ( 1 – σ )
ü
--- =
1
L
-----1 1 – σ
L2
Unter Benutzung dieser Ersatzschaltung kann man bereits einige
Aussagen zur Eingangsimpedanz eines verlustfreien Übertragers
machen:
Zunächst kann der nachgeschaltete ideale Übertrager nur die Übersetzung ü bzw. Klemmenvertauschung bescheiben. Die Eingangsimpedanz des idealen Übertragers für sich allein ist gegeben durch
Z 11 bzw. Y 11 und man erhält bei
- leerlaufendem Ausgang: (es fließt kein Eingangsstrom)
A 11
ü
Z 1ideal = Z 11 = ------- = --- → ∞
0
A 21
- kurzgeschlossenem Ausgang: (es fließt ein unendlich großer
Eingangsstrom)
A 12
1
0
Z 1ideal = -------- = ------- = ---------- = 0
1ڟ
Y 11
A 22
Lineare Zweipole und Zweitore
Seite 235
Für die Eigangsimpedanz des gesamten verlustfreien Übertragers
erhält man dann:
- Leerlaufender Ausgang:
der ideale Übertrager entfällt im Ersatzschaltbild, weil
Z 1ideal → ∞ und es wird Z 1 = jωL 1 , d.h. es fließt Magnetisierungsstrom.
- Kurzgeschlossener Ausgang:
der ideale Übertrager wird im Ersatzschaltbild durch einen
Kurzschluß ersetzt ( Z 1ideal = 0 ) Z 1 = jωσL 1 wird also nicht
Null wie beim idealen Übertrager.
Bei Streuung σ → 0 sind alle drei Spezialfälle gleich, nämlich
L1
ü
--- =
1
L
-----1
L2
10.6.3 Der Übertrager mit Eisenkern
Vorteile des Eisenkerns
- Es läuft praktisch der gesamte Fluß zwangsläufig durch beide
Spulen (großer Koppelfaktor k , kleiner Streuung σ ).
- Mit wachsender Permeabilität wird L 1 und damit Z 1 größer,
d. h. der Magnetisierungsstrom nimmt ab.
Symmetrisches T -Ersatzschaltbild:
L1 σ ⁄ 2
L1 ( 1 – σ ⁄ 2 )
L1 σ ⁄ 2
ü =
L
-----1
L2
Seite 236
GET-Skript
Bei sehr kleinem σ gilt näherungsweise: 1 – σ ≈ 1 – σ ⁄ 2 und
die Induktivitäten werden L 1 ( 1 – 1 – σ ) = L 1 σ ⁄ 2 für die
Längsspulen
Querspulen: L 1 1 – σ = L 1 ( 1 – σ ⁄ 2 )
Anschaulich: L 1 σ ⁄ 2 in den Längsspulen entspricht den Streuflüssen, die nur mit jeweils einer Wicklung verkettet sind und außerhalb des Eisens verlaufen.
L 1 ( 1 – σ ⁄ 2 ) entspricht dem gemeinsamen Fluß durch beide Spulen, im wesentlichen innerhalb des Eisenkerns.
Mit wachsender Permeabilität nimmt die Induktivität der Querspule zu, die der Längsspulen nicht (Streufluß!), d.h. σ wird bei großer Permeabilität kleiner.
10.6.4 Übertrager mit Verlusten
Bisherige Betrachtungen galten für verlustfreien Transformator.
Jetzt: Versuch, die Verluste zu berücksichtigen.
- Ohm‘scher Widerstand
Widerstand R 1 der Primärwicklung in Reihe mit der linken
Längsspule. Widerstand R 2 der Sekundärspule in Reihe mit der
2
Ausgangswicklung des idealen Übertragers oder ü R 2 in Reihe mit der rechten Längsspule des T -Gliedes.
- Wirbelströme
2 2
Sie entziehen eine Leistung P w ∼ ω B̂ . Diese Leistung P w
wird richtig dargestellt durch einen Widerstand R w parallel zur
Querspule; denn die Spannung an der Querspule ist
u = Z ⋅ i ∼ ω ⋅ B̂ und die Leistung in R w ist
2
2
2
P Rw ∼ u ⁄ R ∼ ω ⋅ B̂ Die Leistung P Rw am Widerstand Rw
verhält sich also wie die von Wirbelströmen entzogene Leistung
Pw
- Hystereseverluste
Diese kommen mit jeder Ummagnetisierungs zustande und sind
proportional zu ω . Die Abhängigkeit von B̂ ist nicht linear. Hystereseverluste können also nicht allgemein durch einen Widerstand beschrieben werden.
Aber: Für festes ω und festes B̂ (wie in der Energietechnik)
sind Hystereseverluste konstant und können dann auch durch
einen Widerstand parallel zu R w beschrieben werden.
Lineare Zweipole und Zweitore
Seite 237
So ergibt sich das Ersatzschaltbild für einen verlustbehafteten
Trafo:
I1
U1
R1 L 1 σ ⁄ 2
L1 ( 1 – σ ⁄ 2 )
L1 σ ⁄ 2
R2
RW
ü =
I2
L
-----1
L2
U2
ü/1
10.6.5 Die Transformationseigenschaften des Übertragers
Wir betrachten ab jetzt wieder den verlustfreien Übertrager. Es interessieren die Zusammenhänge zwischen Eingangs- und Ausgangsimpedanz Z 1 und Z 2 .
L1 σ
Z1
L1 ( 1 – σ )
L
Wir verwenden das einfache
-Ersatzsschaltbild.
I' 2
ü/1
I2
U' 2
Z2 U2
Durch Vergleich der Ströme und Spannungen am Ein- und Ausgang des idealen Übertragers im Ersatzschaltbild sieht man, daß
man die Last Z 2 am Ausgang des idealen Übertragers durch die
2
Last Z' 2 = ü Z 2 am Eingang ersetzen und den idealen Übertrager
ganz weglassen kann.
Es ist nämlich U ′ 2 ⁄ U 2 = ü oder U ′ 2 = üU 2
Weil die Ausgangs- und Eingangsleistung am idealen Übertrager
gleich
sein
müssen,
ist
bzw.
U ′2 ⋅ I ′2 = U 2 ⋅ I 2
I ′ 2 ⁄ I 2 = U 2 ⁄ U ′ 2 = 1 ⁄ ü , also I ′ 2 = I 2 ⁄ ü .
Dann ist aber
üU
2
Z ′ 2 = U ′ 2 ⁄ I ′ 2 = -----------2 = ü ⋅ Z 2
I2 ⁄ ü
Seite 238
GET-Skript
2
L
Mit Z' 2 = ü Z 2 auf Ausgangsseite des -Glieds und nach Weglassen des idealen Übertragers erhält man dann folgendes gleichwertiges Ersatzschaltbild, aus dem der Zusammenhang zwischen
Ausgangs- und Eingangsimpedanz sofort ersichtlich ist.
L1 σ
Z1
2
L1 ( 1 – σ )
ü Z2
Zu einer Ausgangsimpedanz (Abschlußwiderstand) Z 2 gehört
also die Eingangsimpedanz Z 1 , wobei allgemein gilt:
1
Z 1 = jωσL 1 + ------------------------------------------------1
1
----------+ -----------------------------2
jωL
(
1 1 – σ)
ü Z2
Natürlich sind die bereits betrachteten Fälle Leerlauf bzw. Kurzschluß am Ausgang Spezialfälle dieses allgemeinen Zusammenhangs:
Kurzschluß ( Z 2 = 0 ) → Z 1 = jωσL 1
Leerlauf ( Z 2 → ∞ ) → Z 1 = jωL 1
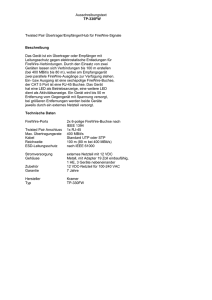
Z 1 = f ( Z 2 ) kann man mit einer Ortskurve darstellen.
Im
jωL1
Z2 → ∞
belieb.Z2
jωσL1
Z2=0
Re