Registrierung von CT– und MRT– Volumendaten der Leber
Werbung

Universität Karlsruhe (TH)
Fakultät für Informatik
Industrial Applications of Informatics and Microsystems
Registrierung von CT– und MRT–
Volumendaten der Leber
Diplomarbeit
von
Thomas Böttger
erstellt am Forschungszentrum Karlsruhe
Institut für Prozessdatenverarbeitung und Elektronik (IPE)
März 2002
Referent:
Prof. Dr.–Ing. R. Dillmann
Universität Karlsruhe (TH)
Koreferent:
Prof. Dr.–Ing. H. Wörn
Universität Karlsruhe (TH)
Betreuer:
Dipl. Inform.–Med. N. V. Ruiter und Prof. Dr. H. Gemmeke
Forschungszentrum Karlsruhe
Erklärung:
Ich bestätige hiermit, dass ich die vorliegende Arbeit selbständig und ohne fremde Hilfe angefertigt habe. Entlehnungen aus anderen Werken sind durch Angabe der Quellen im Text
kenntlich gemacht und im Literaturverzeichnis vollständig angegeben.
Karlsruhe, den 27. März 2002
(Thomas Böttger)
Zusammenfassung
Am Deutschen Krebsforschungszentrum Heidelberg und der Universitätsklinik
Heidelberg soll die Behandlung von Lebermetastasen mittels Strahlentherapie
zu einem medizinisch anerkannten Verfahren weiterentwickelt werden. Dazu
muss vor allem die Definition der Zielvolumina während der Planungsphase
verbessert werden.
Ziel der Arbeit war es, zu untersuchen, inwiefern die Registrierung der zur Planung benutzten und durch eine Abdominalkompression deformierten CT-Daten
mit einem undeformierten Magnetresonanztomogramm möglich ist. Es handelt
sich hierbei um die Registrierung dreidimensionaler multimodaler Bilddaten
weichen Gewebes.
Es wurde ein Verfahren entwickelt, welches die Volumendaten weitgehend automatisch überlagert. Dieses wurde in Java realisiert. Der implementierte zweistufige Registrierungsansatz gliedert sich in eine rigide und eine nicht-rigide Registrierungsphase. Die Optimierung der rigiden Transformation basiert auf der
Maximierung von Mutual Information. Die nicht-rigiden Deformationen werden mittels Thin-Plate Splines modelliert. Zur Bestimmung der für die SplineInterpolation benötigten Kontrollpunkte wurde ein automatisches Verfahren
implementiert, welches lokale Teilbilder anhand der Maximierung von Mutual
Information überlagert.
Anhand zweier Datensätze wurde eine Studie zur Lösbarkeit des Registrierungsproblems mittels der implementierten Methoden durchgeführt. Im Hinblick auf
die Strahlentherapie wurde dabei untersucht, ob die Informationen aus dem
MRT über Lage und Größe des Tumors auf diesem Wege der Behandlungsplanung zugänglich gemacht werden können.
Die Ergebnisse haben gezeigt, dass die sehr starken Deformationen der Referenzdaten mittels der angewandten Spline-Interpolation modelliert und die
MRT-Daten erfolgreich mit dem Planungs-CT registriert werden können.
Die erzielten Resultate zeigen die Lösung, wie dem Mediziner für die Planung
der Strahlentherapie von Lebermetastasen qualitativ bessere Informationen zur
Verfügung gestellt werden können. Aufbauend auf den präsentierten Ideen kann
man damit beginnen eine klinische Applikation zu entwickeln.
Inhaltsverzeichnis
1 Motivation
1.1
4
Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.1.1
Automatische Überlagerung medizinischer Bilddaten . . .
5
1.1.2
Registrierung der Lebervolumina . . . . . . . . . . . . . .
6
1.2
Stand der Technik . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.3
Aufbau der Diplomarbeit . . . . . . . . . . . . . . . . . . . . . .
8
2 Grundlagen
2.1
2.2
2.3
2.4
10
Physiologische Grundlagen . . . . . . . . . . . . . . . . . . . . . . 10
2.1.1
Die Leber . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.2
Leberkrebs . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Behandlung von Lebermetastasen . . . . . . . . . . . . . . . . . . 13
2.2.1
Herkömmliche Therapieformen . . . . . . . . . . . . . . . 13
2.2.2
Die Strahlentherapie . . . . . . . . . . . . . . . . . . . . . 14
Registrierung medizinischer Bilddatensätze . . . . . . . . . . . . 17
2.3.1
Definitionen . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.2
Prinzipieller Ablauf der Registrierung . . . . . . . . . . . 20
2.3.3
Ähnlichkeitsmaße und Gütefunktionen . . . . . . . . . . . 22
2.3.4
Geometrische Transformationen . . . . . . . . . . . . . . . 28
2.3.5
Rigide und affine Transformationen . . . . . . . . . . . . . 29
2.3.6
Nicht–rigide Transformationen . . . . . . . . . . . . . . . 34
Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3 Patientendaten und Phantome
3.1
40
Erläuterung der Patientendatensätze . . . . . . . . . . . . . . . . 41
3.1.1
Eigenschaften der Daten . . . . . . . . . . . . . . . . . . . 41
3.1.2
Erkennung des Tumors . . . . . . . . . . . . . . . . . . . . 43
3.1.3
Besonderheiten der CT–Daten . . . . . . . . . . . . . . . 45
3.1.4
Besonderheiten der MRT–Daten . . . . . . . . . . . . . . 48
1
INHALTSVERZEICHNIS
3.2
3.3
2
Konstruktion der Phantomdatensätze . . . . . . . . . . . . . . . 48
3.2.1
2D–Phantome . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.2.2
3D-Phantom . . . . . . . . . . . . . . . . . . . . . . . . . 49
Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4 Realisierung der Registrierungsstudie
52
4.1
Prinzipielles Vorgehen . . . . . . . . . . . . . . . . . . . . . . . . 53
4.2
Vorverarbeitung der Volumendaten . . . . . . . . . . . . . . . . . 54
4.3
4.4
4.5
4.6
4.2.1
Segmentierung . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2.2
Resampling . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Rigide Registrierung . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.3.1
Freiheitsgrade der Transformation . . . . . . . . . . . . . 55
4.3.2
Durchführung der rigiden Registrierung . . . . . . . . . . 57
Nicht–rigide Registrierung
. . . . . . . . . . . . . . . . . . . . . 60
4.4.1
Thin-Plate Spline–Interpolation . . . . . . . . . . . . . . . 60
4.4.2
Manuelle Kontrollpunktwahl . . . . . . . . . . . . . . . . 60
4.4.3
Hierarchischer Ansatz . . . . . . . . . . . . . . . . . . . . 61
Implementierungsbetrachtungen . . . . . . . . . . . . . . . . . . . 62
4.5.1
Vorwärtsabbildung vs. Rückwärtsabbildung . . . . . . . . 63
4.5.2
Trilineare Interpolation . . . . . . . . . . . . . . . . . . . 65
4.5.3
Verwendetes Gütemaß . . . . . . . . . . . . . . . . . . . . 66
4.5.4
Random Resampling . . . . . . . . . . . . . . . . . . . . . 67
Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5 Ergebnisse der Registrierungsversuche
5.1
5.2
5.3
69
Vorbereitung der Registrierung . . . . . . . . . . . . . . . . . . . 69
5.1.1
Bewertung der Registrierungsergebnisse . . . . . . . . . . 70
5.1.2
Definition der Landmarken . . . . . . . . . . . . . . . . . 71
5.1.3
Ergebnisse der Vorverarbeitung . . . . . . . . . . . . . . . 71
Registrierungsversuche mit affinen Transformationen . . . . . . . 74
5.2.1
Manuelle Registrierung
. . . . . . . . . . . . . . . . . . . 75
5.2.2
Brute–Force–Ansatz . . . . . . . . . . . . . . . . . . . . . 78
5.2.3
Powell–Verfahren . . . . . . . . . . . . . . . . . . . . . . . 85
5.2.4
Registrierung unsegmentierter Datensätze . . . . . . . . . 88
5.2.5
Zusammenfassung der rigiden Registrierungsexperimente
90
Registrierungsversuche mit nicht–rigiden Transformationen . . . 93
5.3.1
2D–Thin-Plate Spline–Interpolation . . . . . . . . . . . . 93
5.3.2
3D–Thin-Plate Spline–Interpolation . . . . . . . . . . . . 97
INHALTSVERZEICHNIS
5.3.3
3
Zusammenfassung der nicht–rigiden Registrierungsexperimente . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
6 Diskussion und Ausblick
6.1
6.2
103
Diskussion der Ergebnisse . . . . . . . . . . . . . . . . . . . . . . 103
6.1.1
Einfluss der Abdominalkompression . . . . . . . . . . . . 104
6.1.2
Überlagerung des Tumors . . . . . . . . . . . . . . . . . . 105
6.1.3
Analyse der Bewertungsmechanismen . . . . . . . . . . . 106
6.1.4
Qualität der Datensätze . . . . . . . . . . . . . . . . . . . 107
Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
A Software
110
A.1 Bedienungsanleitung . . . . . . . . . . . . . . . . . . . . . . . . . 110
A.2 Implementierung . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
A.3 Datenformate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Literaturverzeichnis
115
Kapitel 1
Motivation
In der vorliegenden Arbeit soll untersucht werden, inwiefern die Registrierung
von Volumendaten der Leber möglich ist.
Am Deutschen Krebsforschungszentrum in Heidelberg und der Universitätsklinik Heidelberg wurde eine neue Methode zur Therapie von Lebermetastasen entwickelt. Dabei handelt es sich um ein nicht–invasives Verfahren. Mittels
hochdosierter Röntgenstrahlung wird das kranke Tumorgewebe bestrahlt. In einer ersten durchgeführten Versuchsreihe konnten vielversprechende Ergebnisse
erzielt werden. Es wurde gleichzeitig deutlich, dass das Verfahren noch verbessert werden muss.
Problematisch ist vor allem eine genaue Definition des zu bestrahlenden Gewebes. Mittels der Röntgenstrahlung tötet man Körpergewebe ab. Während der
Therapie ist man natürlich bestrebt nur krankes Gewebe zu bestrahlen. Aus diesem Grund muss das Tumorvolumen so exakt wie möglich bestimmt werden,
was jedoch sehr schwierig ist. Die Strahlendosis und den Ort der Bestrahlung
ermittelt man anhand von Computertomographie–Daten (CT). Während der
Bestrahlung wird ebenfalls eine Computertomographie zur Kontrolle der Therapie durchgeführt. Im CT ist der Tumor jedoch in der Regel schlechter erkennbar
als beispielsweise in einem Magnetresonanztomogramm. Im schlechtesten Fall
kann man Teile des Tumors oder sogar den kompletten Tumor nicht erkennen.
Mit einem Magnetresonanztomogramm (MRT) kann man das kranke Gewebe deutlicher erkennen. Vor der Therapie wird daher zu Diagnosezwecken ein
solches MRT aufgenommen.
Um den Arzt bei der Planung der Strahlentherapie zu unterstützen, sollen die
aus dem MRT gewonnenen Informationen über Ort und Größe des Tumors mit
KAPITEL 1. MOTIVATION
5
den Volumendaten des CT fusioniert werden.
Ziel dieser Arbeit ist es, eine Machbarkeitsstudie anzufertigen, inwiefern eine
solche Datenfusion — die Registrierung der MRT– und CT–Daten — realisierbar ist.
1.1
1.1.1
Problemstellung
Automatische Überlagerung medizinischer Bilddaten
In vielen medizinischen Bereichen erhalten Ärzte heutzutage Unterstützung
durch computergestützte Diagnose– und Therapieplanungssysteme. Besonders
im Bereich der medizinischen Bildgebung wurden in den letzten Jahren große
Fortschritte gemacht.
Eine dabei immer wieder zu lösende Aufgabe ist es, verschiedene Bilddatensätze
der gleichen anatomischen Region zu überlagern. Dieser Vorgang wird als Matching oder Registrierung bezeichnet. Im Verlauf dieser Arbeit soll der Begriff
Registrierung (abgeleitet vom englischen Wort registration“) verwendet wer”
den.
Welchen Nutzen hat es aber, zwei unterschiedliche Bilder zu registrieren? Die
einzelnen Verfahren der Bildgebung bilden nicht die gleichen Informationen ab.
Mittels eines Röntgentomogramms oder eines Magnetresonanztomogramms erkennt man beispielsweise gut anatomische Strukturen. Andere Verfahren wie die
Positronen–Emissions–Tomography (PET) oder die Single–Photon–Emission–
Computed Tomography (SPECT) liefern mehr Informationen über funktionelle im Körper ablaufende Prozesse. Wenn es gelingt, Bilder mit unterschiedlichem Informationsgehalt zu registrieren, ergibt sich ein besseres Gesamtbild der
untersuchten Körperregion. Die Erkenntnisse aus solchen fusionierten Bildern
können zum Beispiel genutzt werden, um anatomische Atlanten zu erstellen,
den Arzt bei der Diagnose zu unterstützen, oder Hilfestellung in der Therapieplanung zu geben.
Es ergeben sich viele verschiedene Kombinationsmöglichkeiten und Aufgaben
der Registrierung. So kann man bespielsweise versuchen, zu verschiedenen Zeitpunkten aufgenommene Bilddaten des gleichen Objekts zu registrieren. Bei einer anderen Aufgabe versucht man Bilddaten zu fusionieren, welche mit unterschiedlichen bildgebenden Verfahren — unterschiedlichen Aufnahmemodalitäten — aufgenommen wurden. Man spricht hierbei von der Überlagerung
KAPITEL 1. MOTIVATION
6
multimodaler Daten.
Des Weiteren ist es für die Lösung des Registrierungsproblems wichtig, welcher
Teil des Körpers untersucht wird. So wird die Fusion von Bilddaten des Kopfes
heute bereits gut beherrscht. Die Überlagerung von Daten, in denen weiches
Gewebe dargestellt wird, kann immer noch als ungelöst betrachtet werden.
Bei der hier durchgeführten Studie handelt es sich um die Registrierung multimodaler dreidimensionaler Volumendaten des Bauchraumes. Es soll weiches
Gewebe registriert werden.
Ein zusätzlich auftretendes Problem — die Abdominalkompression — soll im
nächsten Abschnitt erklärt werden.
1.1.2
Registrierung der Lebervolumina
Zu Diagnosezwecken wird ein MRT der Leber aufgezeichnet. Darin können zu
behandelnde Tumoren diagnostiziert werden. Soll nun die stereotaktische Bestrahlung für die Behandlung eines gefundenen Tumors zum Einsatz kommen,
wird eine CT-Aufnahme gemacht. In dieser CT wird der genaue Ort des Tumors für die Bestrahlung definiert. Gleichzeitig erkennt man im CT, wieviel
Strahlung die einzelnen Gewebearten absorbieren. Die Kenntnis der einzelnen
Absorptionskoeffizienten ist entscheidend für die Wahl der Bestrahlungsdosis.
Da die CT–Aufnahmen den Tumor oft schlecht wiedergeben, soll das diagnostische MRT mit dem Planungs–CT registriert werden. Dazu kann man die
MRT–Daten nicht einfach eins zu eins auf die CT–Daten übertragen. Das wird
allein schon dadurch verhindert, dass die beiden Volumina unterschiedlich große
Bereiche des Körpers darstellen. Zusätzlich haben die beiden Datensätze eine
unterschiedliche Auflösung.
Aufgrund einer weiteren Besonderheit der Daten, der Abdominalkompression,
gestaltet sich die Registrierung der Leberdaten besonders schwierig. Um Bewegungen der Leber während der Therapieplanung zu minimieren, wird der
komplette Bauchraum komprimiert. Dies geschieht mittels einer Platte, die unterhalb des Brustkorbes in den Bauch gedrückt wird. Zusammen mit sämtlichen
anderen sich im Bauchraum befindlichen Organen wird die Leber dabei verschoben und deformiert. In diesem Zustand werden dann die Bestrahlungsplanung
(Aufnahme der CT–Daten und Definition des zu bestrahlenden Volumens) und
die Bestrahlung selbst durchgeführt.
Atembewegungen, Füllung des Magens oder Verdauungsvorgänge können die
KAPITEL 1. MOTIVATION
7
Form und Lage der Leber im MRT beeinflussen. Abgesehen von diesen durch
natürliche“ Einflüsse hervorgerufenen Deformationen ist die Leber im MRT
”
undeformiert.
Die durch die Bauchplatte deformierte und verschobene Leber des CT soll mit
den MRT-Bildern der Leber registriert werden.
1.2
Stand der Technik
Am DKFZ in Heidelberg werden bereits Patienten mit Lebermetastasen mittels
stereotaktischer Bestrahlung therapiert. Dabei wird die Bestrahlungsplanung
aktuell nur anhand der CT–Aufnahmen durchgeführt. Da im CT die Lebermetastasen teils sehr schlecht beziehungsweise unvollständig erkennbar sind, kann
die Volumendefinition anhand der CT-Daten sehr unzureichend sein. Um dennoch den kompletten Tumor zu bestrahlen, definiert der Arzt ein zusätzliches
Volumen. Dies geschieht aufgrund medizinischer Kenntnisse über die möglichen
Ausbreitungsrichtungen des Tumors und auch aufgrund der Kenntnisse, die der
Arzt aus dem diagnostischen MRT gewinnen konnte. Dabei kann er nur Vermutungen anhand seines medizinischen Fachwissens anstellen, wo der im MRT
sichtbare Tumor sich während der Therapieplanung befindet.
Da durch das CT keine genaue Kenntnis über die Größe und Lage des Tumors
vorhanden ist, kann es einerseits passieren, dass das definierte Zielvolumen zu
klein ist. Infolge dessen wird nicht der komplette Tumor bestrahlt, so dass es
sehr wahrscheinlich ist, dass der Tumor nicht vollständig zerstört wird. Andererseits kann es auch passieren, dass der definierte Sicherheitsrand zu groß ist.
Es würde dann während der Strahlentherapie gesundes Lebergewebe zerstört.
Um beide Fälle zu vermeiden muß das Zielvolumen exakter definiert werden
können.
Anhand der Informationen aus den MRT–Daten könnte eine genauere Therapieplanung durchgeführt werden. Dazu müssen das MRT und das CT zuerst
registriert werden. Es handelt sich hierbei um die Registrierung dreidimensionaler multimodaler Bilddaten weichen Gewebes.
Im Bereich der Überlagerung weichen Gewebes existieren nur einzelne, auf
sehr spezielle Probleme zugeschnittene Lösungsansätze. Einige nennenswerte
Veröffentlichungen sind die Arbeiten von M. Fornefett [13] und K. Rohr et al.
[19] oder [32], die sich mit interpolierenden Thin-Plate Splines und landmarkenbasierter elastischer Registrierung beschäftigen. N. Ruiter beschäftigt sich
KAPITEL 1. MOTIVATION
8
mit der elastischen Registrierung von Röntgenmammogrammen und Magnetresonanztomogrammen der Brust (vgl. [33], [34]).
Zur Registrierung von CT– und MRT–Volumendaten der Leber waren bis
zum jetzigen Zeitpunkt keine Veröffentlichungen bekannt. Eine diesem Thema ähnliche Aufgabe beschreibt T. Rohlfing in [31]. Er versucht MRT–
Sequenzaufnahmen der Leber elastisch zu registrieren. Dabei müssen die durch
Atmung und Bewegung der inneren Organe verursachten Deformationen der Leber modelliert werden. J.L. Boes et al. stellten in [7] bereits 1994 ein Verfahren
zur Generierung eines normalisierten Lebermodells aus CT–Daten vor.
Beide Ansätze beschäftigen sich zwar mit dem gleichen anatomischen Zielobjekt
— der Leber —, sollen aber anderen Aufgaben dienen. So wird bei Boes ein CT
auf ein Standard–Lebermodell transformiert, um das Lebervolumen besser bestimmen zu können. Rohlfing et al. versuchen mit dem von ihnen vorgestellten
Verfahren, die Verschiebung und Deformation der Leber aufgrund von Atembewegungen aus den Daten herauszurechnen. Die Verschiebung als Folge von
Atembewegungen wird im vorliegenden Fall durch die schon erwähnte Abdominalkompression kleiner als 10 mm (vgl. [15]) und wird daher hier vernachlässigt.
Während T. Rohlfing versucht monomodale Daten zu registrieren, ist das hier
behandelte Registrierungsproblem aus der Klasse der multimodalen Bildregistrierung.
Zusätzlich entwickelt sich die hier zu lösende Registrierungsaufgabe aufgrund
der Abdominalkompression zu einem sehr speziellen Problem.
1.3
Aufbau der Diplomarbeit
In Kapitel 2 werden die Grundlagen erläutert, welche zum Verständnis der
behandelten Probleme notwendig sind. Es wird ein grober Überblick über die
Anatomie und Physiologie der Leber gegeben. Grundlagen der Bildregistrierung
werden dargelegt. Insbesondere wird dabei auf die verschiedenen möglichen geometrischen Transformationen eingegangen. Das Gütemaß Mutual Information
wird vorgestellt.
In Kapitel 3 werden die verwendeten Testdatensätze vorgestellt. In diesem Rahmen werden die Abdominalkompression sowie ihre Auswirkungen auf die CT–
Datensätze ausführlich betrachtet.
In Kapitel 4 werden die in die Praxis umgesetzten Registrierungsideen her-
KAPITEL 1. MOTIVATION
9
geleitet und erläutert. Ausgehend von den vorhandenen Rohdatensätzen wird
erklärt, welche Vorverarbeitungsschritte stattfanden. Danach werden die entwickelten Registrierungsalgorithmen detailliert behandelt.
In Kapitel 5 werden die während der Arbeit erzielten Registrierungsergebnisse
vorgestellt. Sie werden analysiert und miteinander verglichen. Es werden auch
mögliche Schwachstellen sondiert und diskutiert.
Der letzte Teil der Arbeit bietet eine zusammenfassende Diskussion der erzielten Resultate. Hier wird die Frage erörtert, inwiefern die durchgeführte Studie
erfolgreich war. Gleichzeitig wird hinterfragt, ob es sinnvoll ist den verwendeten Lösungsansatz weiterzuentwickeln. Es werden mögliche nächste Schritte
besprochen.
Kapitel 2
Grundlagen
Nach einer ersten Formulierung des Problems werden in diesem Kapitel Basiswissen über Physiologie und Anatomie der Leber sowie Grundlagen der Registrierung vermittelt. Es wird zusätzlich eine kurze Einführung in die Strahlentherapie gegeben.
2.1
2.1.1
Physiologische Grundlagen
Die Leber
Mit 1, 4 bis 1, 8 Kilogramm Gewicht ist die Leber das schwerste Körperorgan
nach der menschlichen Haut. Sie liegt im Oberbauch unter dem Zwerchfell und
verfügt neben dem normalen Gefäßnetz aus Arterien und Venen zusätzlich über
ein Pfortadersystem. Durch dieses System gelangt nährstoffreiches Blut aus den
Eingeweiden ins Lebergewebe und von hier über die Lebervene zurück in den
Körperkreislauf.
Die Leber hat mehrere für den menschlichen Organismus lebensnotwendige
Funktionen, unter anderem:
• Produktion von Gallenflüssigkeit
• Verarbeitung und Speicherung chemischer Substanzen
• Verarbeitung körpererhaltender Grundsubstanzen
• Abbau und Ausscheidung des Blutfarbstoffs in Form von Bilirubin
• Abbau von Stoffwechselprodukten und Giften
KAPITEL 2. GRUNDLAGEN
11
• Regulation von Spurenelement– und Vitaminstoffwechsel
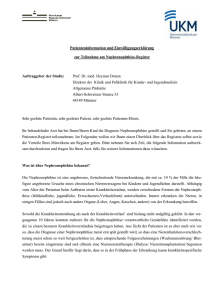
Anatomie der Leber
Die Leber besteht aus zwei Leberlappen, dem rechten und dem linken. Der
größte Teil der Leber, der rechte Leberlappen (Lobus dexter ), liegt unter dem
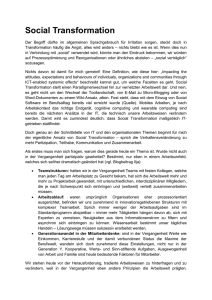
Zwerchfell und ist mit diesem teilweise verwachsen. Abbildung 2.1 skizziert grob
die Lage der Leber im Bauchraum.
Abbildung 2.1: Lage der Leber im Bauchraum (aus [42])
Der linke Leberlappen (Lobus sinister ) reicht bis in den linken Oberbauch. Unter dem rechten Leberlappen befindet sich die Gallenblase, unter dem linken die
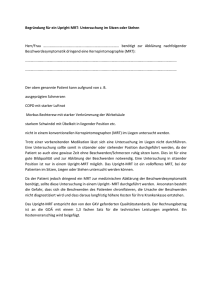
Bauchspeicheldrüse (Pankreas). Abbildung 2.2 zeigt den schematischen Aufbau
der Leber.
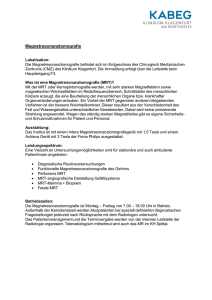
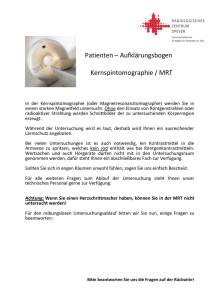
Wie die Leber in einem Röntgencomputertomogramm oder einem Magnetresonanztomogramm aussieht, zeigt Abbildung 2.3. Zur besseren Orientierung
wurden einige wichtige Strukturen markiert.
Bewegung der Leber
Die Leber besteht aus weichem deformierbaren Körpergewebe. Sie befindet sich
nicht starr im Bauchraum, sondern ist Bewegungen unterworfen. Durch die
Bewegung des Zwerchfells — mit dem die Leber teils verwachsen ist — während
der Atmung bewegt sich auch die Leber auf und ab. Zusätzlich wird sie während
der Inspirationsphase (Einatmen) leicht komprimiert. Lage und Form der Leber
werden auch durch Verdauungsvorgänge beeinflusst.
Es wurde eine Reihe von Untersuchungen durchgeführt ([1], [20] und [37]) um
die Größe der Bewegungen der Bauchorgane, respektive der Leber, zu ermitteln.
KAPITEL 2. GRUNDLAGEN
12
Abbildung 2.2: Leber und andere Bauchorgane in Vorderansicht (aus [35])
Die Verschiebungen der Leber haben eine Größenordnung von durchschnittlich
20 mm – 40 mm.
Da diese Bewegungen zu groß sind, um sie während der Bestrahlungsplanung
bzw. der Therapie vernachlässigen zu können, wird der Bauchraum zur Planung
und Durchführung der Therapie mittels einer Platte komprimiert. Dadurch wird
eine Bewegung der Leber größtenteils verhindert.
Wie jeder Teil des menschlichen Körpers, kann auch die Leber erkranken. Eine
mögliche Erkrankung, die im nächsten Kapitel vorgestellt wird, ist Leberkrebs.
2.1.2
Leberkrebs
Es gibt zwei Arten von Leberkrebs, den primären und den sekundären Leberkrebs.
Primärer Leberkrebs Bei primärem Leberkrebs handelt es sich um einen
malignen, also einen bösartigen, Tumor, welcher sich in der Leber bildet. Das
hepatozelluläre Karzinom (HCC) ist die häufigste Form dieser primären Lebertumore (vgl. [41]). Während HCC in Europa und Nordamerika selten auftritt,
gehört es laut der Weltgesundheitsorganisation WHO in vielen asiatischen und
einigen afrikanischen Ländern zu den drei am häufigsten zum Tode führenden
KAPITEL 2. GRUNDLAGEN
CT
13
MRT
Abbildung 2.3: CT– und MRT–Schichtbilder des Bauchraumes (Körperquerschnitt)
Krebserkrankungen.
Sekundärer Leberkrebs Als sekundären Leberkrebs bezeichnet man die
Bildung von Metastasen in der Leber als Folge eines primären Karzinoms in
einem anderen Teil des Körpers. Häufig sind Lebermetastasen die Folge von
primären Tumoren im Darm oder in der Bauchspeicheldrüse.
Für die Behandlung dieser Lebermetastasen wird die am Klinikum in Heidelberg
entwickelte Strahlentherapie verwendet.
2.2
2.2.1
Behandlung von Lebermetastasen
Herkömmliche Therapieformen
Bisherige Ansätze zur Therapie der Lebermetastasen basieren darauf, den Tumor operativ zu entfernen. Bei dieser Behandlungsform von Leberkrebs muss
beachtet werden, dass die Leber viele für den Körper lebensnotwendige Aufgaben erfüllt. Daher kann nicht beliebig viel Lebergewebe entfernt werden. Des
Weiteren gibt es auch Tumoren, die inoperabel sind.
Im Falle der Behandlung mittels Chemotherapie muss man bedenken, dass die
Leber genau das Organ ist, welches die Gifte abbauen soll, die im Verlauf der
KAPITEL 2. GRUNDLAGEN
14
Therapie in den Körper gelangen. Ist sie jetzt durch die Behandlung geschwächt,
kann dies zu gesundheitlichen Problemen führen. Das kann soweit gehen, dass
der Patient sich nicht mehr von der Behandlung erholt.
Bei einem anderen Therapieansatz wird ein Laser über Blutgefäße in den Tumor
geführt. Der Tumor wird so von innen verbrannt.
Ein großer Vorteil der im nächsten Abschnitt vorgestellten Therapie mittels
stereotaktischer Bestrahlung ist, dass es sich um ein nicht–invasives Verfahren
handelt. Außerdem ist die Behandlung nicht stationär und für den Kreislauf
des Patienten kaum belastend.
2.2.2
Die Strahlentherapie
Die stereotaktische Bestrahlung ist ein relativ neues Verfahren zur nicht–
invasiven Tumortherapie. Sie wurde erstmals zur Therapie von Hirnmetastasen
eingesetzt. Hier hat sie sich als erfolgsversprechende Alternative zur chirurgischen Entfernung der Tumore bewährt.
Bei der stereotaktischen Bestrahlung wird das Zielvolumen — der Tumor —
hochkonzentriert bestrahlt. Als Strahlenquelle dient ein Linearbeschleuniger.
Während der Behandlung lässt man den Strahlerkopf des Linearbeschleunigers
um den Patienten kreisen. Zusätzlich kann die Patientenliege in ihrer horizontalen Ebene gedreht werden. Kombiniert man diese beiden Bewegungen, kann
man den Tumor aus einer Vielzahl von Raumrichtungen bestrahlen. Im Tumor
selbst addieren sich diese Strahlen zu ihrer notwendigen Gesamtdosis auf.
Zur Therapie von Tumoren außerhalb des Kopfes wurde dieses Verfahren erstmals von Blomgren et al. 1995 eingesetzt (vgl. [4], [5], [21]).
Strahlentherapie am DKFZ
Am Deutschen Krebsforschungszentrum in Heidelberg hat man es sich zum
Ziel gesetzt, die Strahlentherapie von Lebermetastasen zu einer von Medizinern
akzeptierten Alternative der Tumortherapie zu entwickeln. Seit 1997 werden
Versuche an Patienten mit inoperablen Tumoren in der Leber und der Lunge
durchgeführt. In einer ersten Studie wurden vielversprechende Ergebnisse erzielt
(vgl. [15] und [16]).
KAPITEL 2. GRUNDLAGEN
15
Diagnose Es ist häufig der Fall, dass Lebermetastasen sehr spät erkannt werden. Zur Diagnose kann man CT– oder MRT–Bilder verwenden. Allerdings
können nicht alle Tumoren im CT erkannt werden. Zuverlässiger lassen sich Lebermetastasen mit einem MRT diagnostizieren. Nachdem die Diagnose erstellt
wurde, folgt die Planung der Therapie.
Therapieplanung Der
Kernpunkt
der
Behandlungsplanung
ist
eine
möglichst genaue Bestimmung des zu bestrahlenden Zielvolumens. Dazu wird
der Patient in die Bestrahlungsapparatur gelegt. Es wird ein Röntgen–CT aufgenommen. In diesem CT wird der Tumor lokalisiert. Die CT–Aufnahmen sind
unbedingt notwendig, da hier die Absorptionskoeffizienten für die einzelnen Gewebetypen ermittelt werden können. Diese sind mit entscheidend für die zu
wählende Bestrahlungsdosis sowie die Bestrahlungsrichtungen. Mit Hilfe der
Planungssoftware VOXELPLAN werden die Raumkoordinaten des Tumorzentrums und die Bestrahlungsrichtungen ermittelt.
Das MRT wird nicht während der Planung aufgenommen, da die Betrahlungsapparatur mit dem Kernspintomographen inkompatibel ist. Somit muss man
auf die wesentlich schlechtere CT–Aufnahme zurückgreifen.
VOXELPLAN VOXELPLAN ist ein am DKFZ entwickeltes Planungssystem zur Unterstützung aller Phasen der dreidimensionalen Strahlentherapie.
Es wird seit 10 Jahren in der Abteilung Medizinische Physik des DKFZ kontinuierlich weiterentwickelt (vgl. [2],[3] und [18]). Für die einzelnen Schritte der
Therapieplanung und der Behandlung stellt VOXELPLAN verschiedene Module zur Verfügung. Eines dieser Module ist das Programm VIRTUOS (Virtual
Radiotherapy Simulator), welches auch in dieser Arbeit für verschiedene Aufgaben verwendet wurde. VIRTUOS bietet vielfälitge Möglichkeiten eine Strahlentherapie zu planen und zu simulieren. Im Rahmen der Arbeit wurde VIRTUOS
zur Visualisierung und Segmentierung der Datensätze eingesetzt.
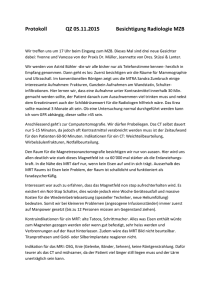
Bestimmung von Zielvolumen und Risikoorganen (vgl. [29]) Anhand
der Schichtbilder des Planungs-CT wird das tatsächlich sichtbare Tumorvolumen, das Gross Tumor Volume (GTV) definiert. Um mögliche unsichtbare
Ausläufer des Tumorgewebes zu berücksichtigen, wird um das Gross Tumor
Volume herum ein klinisches Zielvolumen (Clinical Target Volume, CTV) definiert. Zur Definition des klinischen Zielvolumens kann der Arzt die Histologie
des Tumorgewebes sowie seine eigenen Erfahrungen nutzen. Als drittes müssen
KAPITEL 2. GRUNDLAGEN
16
Ungenauigkeiten der Patientenpositionierung und Fehlerquellen durch Organbewegungen oder Bewegungen des Patienten berücksichtigt werden. Dies geschieht über die Definition des Planungszielvolumens (Planning Target Volume,
PTV). Das Planungszielvolumen erhält letztendlich die therapeutisch wirksame
Strahlendosis.
Abbildung 2.4 stellt die verschiedenen Volumina schematisch dar.
Planungszielvolumen
klinisches Zielvolumen
Gross Tumor Volume
Abbildung 2.4: Schematische Darstellung der verschiedenen Zielvolumina (aus
[29])
Je nach Strahlenempfindlichkeit müssen die sogenannten Risikoorgane (Organs
at risk, OAR) vor zu hohen Strahlendosen geschützt werden. So führt beispielsweise bei der Tumorbehandlung im Bereich des Kopfes die Schädigung
der Augenlinse zum Verlust der Sehkraft. Solche Schädingungen müssen vermieden werden. Während der Strahlentherapiebehandlung im Abdomen muss
beispielsweise das Rückenmark vor zu hohen Strahlendosen geschützt werden.
Patientenlage Die Lage, die der Patient während der Planungsphase hatte,
muss für die Behandlung exakt reproduziert werden können, weil sonst eine
korrekte Bestrahlung des Tumorvolumens unmöglich ist. Eine präzise Lagerung
wird durch ein stereotaktisches Lokalisationssystem ermöglicht. Um Bewegungen und zusätzliche Lageänderungen des Patienten nach der Planung zu vermeiden, wird der Patient zur Planungszeit außerdem auf ein Vakuumkissen gelegt.
Dieses Kissen wird leergepumpt und passt sich so an die jeweilige Körperform
an. Die Patientenposition kann auf diese Weise zur Behandlungszeit gut reproduziert werden.
Des Weiteren ist es wichtig, dass Bewegungen des Zielvolumens durch Atmung
und andere physiologische Prozesse, z.B. Verdauungsvorgänge, unterbunden
werden. Zu diesem Zweck wird der komplette Bauchraum mittels einer Platte,
KAPITEL 2. GRUNDLAGEN
17
wie in 1.1.2 einführend beschrieben, komprimiert.
Ergebnisse der ersten DKFZ–Studie (vgl. [16]) Zwischen April 1997
und September 1999 wurden 37 Patienten mit Lebermetastasen nach der Methode der stereotaktischen Einzeitbestrahlung behandelt. Die angewandten Strahlendosen betrugen zwischen 14 und 26 Gy. Dabei wurden 60 Lebertumoren (4
primäre Tumoren und 56 Metastasen) behandelt. Die durchschnittliche Größe
der Tumoren betrug 10 cm3 .
55 der behandelten 60 Tumoren (35 Patienten) wurden weiter beobachtet. Alle Patienten vertrugen die Behandlung gut. 54 der 55 beobachteten Tumoren
waren nach 6 Wochen unter lokaler Kontrolle, das heißt das der Tumor nicht
weiter wucherte. In 22 Fällen hörte der Tumor auf zu wuchern und die Tumorgröße stabilisierte sich (Volumenreduktion < 50%). 28 Mal reagierte die
Tumoren teilweise auf die Behandlung (Volumenreduktion ≥ 50%). Die übrigen 4 Tumore reagierten komplett auf die Behandlung und bildeten sich zurück
(Volumenreduktion > 99%).
Nach 18 Monaten waren 81% der Tumoren unter lokaler Kontrolle. In 12 Fällen
versagte die Behandlung völlig. (Volumenreduktion ≤ 10%).
Die Studie hat gezeigt, dass die stereotaktische Einzeitbestrahlung eine mögliche
Behandlungsmethode für einzelne inoperable Lebertumoren ist.
Gleichzeitig wurde deutlich, dass das zu bestrahlende Volumen genauer definiert
werden muss.
Dazu müssen die beiden Volumina (CT und MRT) registriert werden. Der Rest
des Kapitels beschäftigt sich den wichtigsten mathematischen Grundlagen der
Registrierung.
2.3
Registrierung medizinischer Bilddatensätze
Nachdem mehrere Bilder des gleichen Objektes aufgenommen wurden, sollen
die in den Daten vorhandenen sich ergänzenden Informationen vereinigt werden. Man versucht auf diesem Weg ein besseres Gesamtbild der untersuchten
Körperregion zu erhalten. Dieses kann genutzt werden, um die Diagnose, die
Therapieplanung oder die Behandlung des Patienten zu unterstützen und zu
verbessern.
Es existieren verschiedene Registrierungsprobleme; hier seien die monomodale
KAPITEL 2. GRUNDLAGEN
18
Registrierung, die multimodale Registrierung und die Registrierung mit einem
topologischen Atlas genannt. Man findet in der Literatur viele Beschreibungen
der unterschiedlichen Aufgaben sowie der Lösungsansätze. Eine umfassende und
ebenfalls aktuelle Übersicht zum Thema der Bildregistrierung findet man bei
Hill et al. (vgl. [17], [14]). Hill vereint die wesentlich älteren Artikel von van den
Elsen et al. [39] und Maurer und Fitzpatrick [24]. Zusätzlich setzt er sich mit
den aus aktuellen Veröffentlichungen hervorgegangenen neuen Verfahren der
Bildregistrierung auseinander und gibt somit einen durchaus guten Überblick
über den Stand der Technik. Des Weiteren geht er auf die wichtigsten aktuellen
Problembereiche der Registrierung ein und erläutert diese.
In diesem Abschnitt werden die für diese Arbeit relevanten Grundlagen der
Registrierung erläutert. Für darüber hinausgehende Informationen können die
erwähnten Artikel verwendet werden.
2.3.1
Definitionen
Um Unklarheiten bei der verwendeten Terminologie zu vermeiden, sollen zuerst
die gewählten Bezeichnungen und Begriffe definiert und genau erläutert werden.
Bild
Ein Bild A besteht aus einer Menge diskreter Punkte xA , die den diskreten
Definitionsbereich ΩA bilden:
ΩA : diskreter Definitionsbereich von Bild A.
Jedem dieser Punkte xA kann ein Grauwert a zugeordnet werden. Sei
IA = (a1 , a2 , . . . , an )
die Menge aller n Grauwertintensitäten, die in Bild A enthalten sind. Die Zuordnung der Grauwerte an zu den einzelnen Punkten xA des diskreten Definitionsbereiches ΩA wird über die Abbildung A definiert:
A : xa ∈ ΩA 7→ a ∈ IA
Das Bild A wird vollständig durch die Abbildung A beschrieben.
(2.1)
KAPITEL 2. GRUNDLAGEN
19
Der Begriff Bild kann hierbei für 2–dimensionale oder auch 3–dimensionale
Datensätze stehen. Ist die Dimension des Bildes von Bedeutung, so wird sie
auch explizit genannt.
Registrierung
Unter der Registrierung zweier Bilder versteht man die räumliche Anpassung
des Modellbildes M an das Referenzbild R, so dass anatomisch korrespondierende Punkte nach der Registrierung auch räumlich überlagert sind.
Während der Registrierung der Bilder M und R wird eine geometrische Transformation T ausgewählt und optimiert. Das Modellbild M wird mittels dieser
Transformation T auf das Referenzbild R abgebildet. Das Ergebnis einer Transformation ist eine Überlagerung des Referenzbildes R mit dem transformierten
Modellbild MT .
Wird im Weiteren der Begriff der Überlagerung verwendet, ist solch ein Transformationsergebnis gemeint.
Die Optimierung der Transformation geschieht mittels einer Gütefunktion G,
die eine Aussage über die Ähnlichkeit der Bilder trifft.
Das Ergebnis der Registrierung ist die Transformation, für die die Gütefunktion
G optimal ist.
Geometrische Transformation T
Die geometrische Transformation ist eine Abbildung, welche anatomisch korrespondierende Punkte der Bilder M und R aufeinander abbilden soll.
T bildet die Punkte xM aus Modellbild M auf die Punkte xR des diskreten
Definitionsbereiches des Referenzbildes R ab.
T : xM ∈ ΩM 7→ xR ∈ ΩR ⇔ T (xM ) = xR
(2.2)
ΩM : diskreter Definitionsbereich des Modellbildes M
ΩR : diskreter Definitionsbereich des Referenzbildes R
xM : Punkte aus ΩM
xR : Punkte aus ΩR
Das mittels T transformierte Bild wird mit MT bezeichnet. Die Punkte xT
M des
KAPITEL 2. GRUNDLAGEN
20
transformierten Modellbildes MT liegen im diskreten Definitionsbereich ΩR von
Referenzbild R.
Gütefunktion G
Die Gütefunktion G bewertet die Qualität einer durch die Transformation T
erzielten Überlagerung des Modellbildes MT mit dem Referenzbild R:
G(R, MT ) : Maß für die Güte der angewendeten Transformation T .
Nachdem die zum Verständnis der Registrierung notwendigen Begriffe Bild,
Transformation unf Gütefunktion definiert sind, kann näher auf das im nächsten
Abschnitt vorgestellte Grundschema der Registrierung eingegangen werden.
2.3.2
Prinzipieller Ablauf der Registrierung
Zuerst werden die zwei zu registierenden Bilddatensätze aufgenommen. Danach
wird festgelegt, welches der Bilder das Referenzbild R beziehungsweise das zu
transformierende Modellbild M ist.
Auswahl von Ähnlichkeitsmerkmalen
Nach der Akquisition der Bilder kann mit der Selektion gemeinsamer Merkmale
begonnen werden.
Landmarken Solche in beiden Bildern vorhandenen Ähnlichkeitsmerkmale
werden in der Medizin als Landmarken bezeichnet.
Sie können künstlichen oder natürlichen Ursprungs sein. Künstliche Landmarken sind zum Beispiel am Patienten angebrachte Objekte oder Markierungen.
Natürliche Landmarken sind anatomische Punkte, Oberflächen oder Strukturen.
Als Ähnlichkeitsmerkmale können aber auch die Grauwerte eines Bildes verwendet werden.
Auswahl der Gütefunktion G
Unter Zuhilfenahme der selektierten Merkmale kann jetzt eine Gütefunktion
G definiert werden. Dieses Maß G(R, MT ) dient der Bewertung der mittels T
KAPITEL 2. GRUNDLAGEN
21
erzielten Überlagerung der beiden Bilder.
Auswahl einer Transformation T
Als letztes wird eine Transformation T bestimmt, die das Modellbild auf das
Referenzbild abbildet. Ziel ist eine möglichst korrekte Überlagerung anatomisch
korrespondierender Punkte.
Aus den vorgestellten Arbeitsschritten ergibt sich das in Abbildung 2.5 gezeigte
Grundschema einer Registrierung.
Akquisition der
Bilder
Identifikation
der Ähnlichkeitsmerkmale
Auswahl einer
Gütefunktion G
Bestimmung einer
TransformationT
Optimierung vonT
so dass G optimal
Fusion der
Bilder
Abbildung 2.5: Ablauf einer Registrierung (aus [27])
Die Wahl der Transformation T sowie der Gütefunktion G hängt in großem Maß
von der Charakteristik des behandelten Problems ab. Die maximal mögliche
Qualität einer Registrierung wird von der Wahl der Transformation beeinflusst.
Wählt man beispielsweise eine für das jeweilige Problem ungeeignete Transformation, wird die Qualität der Registrierung niedrig sein. Gleiches gilt für die
Gütefunktion.
Aufgrund ihrer Bedeutung für das Gesamtergebnis der Registrierung werden G
und T im Folgenden detailliert betrachtet.
KAPITEL 2. GRUNDLAGEN
2.3.3
22
Ähnlichkeitsmaße und Gütefunktionen
Nachdem das Modellbild M transformiert wurde, muss die Qualität der erzielten Überlagerung von R und MT ermittelt werden. Wie bereits oben erwähnt
wurde, geschieht dies durch die Berechnung der Gütefunktion G(R, MT ).
Für die Bewertung multimodaler Daten wird oftmals Mutual Information“ als
”
Gütemaß verwendet. Bei dieser entropiebasierten Bewertungsfunktion wird versucht, die Qualität der Überlappung zweier Bilder A und B anhand der im Überlappungsbild enthaltenen Information“ zu ermitteln. Das Überlappungsbild
”
besteht aus allen Punkten, denen zwei Grauwerte zugeordnet werden können,
jeweils ein Grauwert aus R(xR ) und M T (xT
M ).
Umformulierung des Registrierungsproblems nach Hill [17]: Die Registrierung zweier Bilder R und M bedeutet, dass sehr viele gemeinsame (in
beiden Bildern identische) Bildteile übereinander liegen. Im Falle der Registrierung zweier Bilder des Kopfes hat man bei korrekter Registrierung ein fusioniertes Ergebnisbild, das zwei Augen, zwei Ohren, einen Mund usw. enthält. Ist
die Registrierung falsch, enthält das Ergebnisbild diese Strukturen doppelt.
Diese Idee nutzend, kann man sich das Registrierungsproblem als ein Minimierungsproblem der im fusionierten Ergebnisbild enthaltenen Information vorstellen. Wie bewertet man aber die in einem Bild enthaltene Information? Das am
weitesten verbreitete Maß für Information im Bereich der Signal– und Bildverarbeitung ist die Entropie H.
Die Entropie H
Die Entropie H kann als ein Maß für die in einem Bild enthaltene Information
verwendet werden. Zuerst soll jedoch erklärt werden, wozu die Entropie in der
Informationstheorie ursprünglich eingeführt wurde und wie sie sich definiert.
Die Entropie ist eine Zustandsgröße der Thermodynamik, die ein Maß für die
Unordnung eines abgeschlossenen Systems beziehungsweise für die Irreversibilität eines Vorgangs darstellt. Je mehr die über ein System bekannte Information
zunimmt, desto kleiner wird die Unordnung des Systems; demzufolge nimmt die
Entropie des Systems ab.
Entropie in der Informationstheorie Man stelle sich einen Kanal zur
Übertragung von n Zeichen zwischen einem Sender und einem Empfänger
KAPITEL 2. GRUNDLAGEN
23
vor. Die Wahrscheinlichkeiten für die einzelnen Zeichen sind gegeben durch
p1 , p2 , p3 , · · · , pn . Die Entropie H stellt die, durch diese n Zeichen, durchschnittlich übertragene Information dar. Sie wird folgendermaßen definiert (vgl. [36]):
H=−
n
X
pi log2 pi
(2.3)
i=1
Dieses Maß kann auch in der Bildverarbeitung genutzt werden.
Entropie in der Bildverarbeitung Interpretiert man jeden Grauwert a ∈
IA eines Bildes als genau ein Zeichen, kann die Entropie (2.3) benutzt werden,
um den Informationsgehalt des Bildes zu bestimmen.
Dazu müssen die Wahrscheinlichkeiten der einzelnen Grauwerte ermittelt werden. Die Wahrscheinlichkeiten der einzelnen Grauwerte eines Bildes kann man
über das Grauwerthistogramm schätzen. Eine weitere Möglichkeit zur Bestimmung der Grauwertverteilungen ist die Parzen–Window–Method (vgl. [12]).
Diese wird hier nicht verwendet, da die zuerst genannte Methode bereits implementiert vorlag.
Für ein Bild A ergibt sich als Formel für die Entropie:
H(A) = −
X
pA (a) log2 pA (a) ∀a ∈ IA
(2.4)
a
IA :
Menge aller in Bild A enthaltenen Grauwerte
pA (a): Wahrscheinlichkeit, dass ein Voxel des Bildes A den Grauwert
a hat
Liegen zwei Bilder vor, welche miteinander verglichen werden sollen, kann man
die gemeinsame Entropie H(A, B) dieser beiden Bilder bestimmen.
Dieser Wert lässt sich aus der gemeinsamen Wahrscheinlichkeitsverteilung ermitteln. Diese lässt sich wiederum aus dem zweidimensionalen Histogramm des
sich überlappenden Teils der Bilder berechnen.
H(A, B) = −
XX
a
IA :
p(A,B) (a, b) log2 p(A,B) (a, b) ∀a ∈ IA , ∀b ∈ IB
b
Menge aller in Bild A enthaltenen Grauwerte
(2.5)
KAPITEL 2. GRUNDLAGEN
IB :
Menge aller in Bild B enthaltenen Grauwerte
p(A,B)) (a, b) :
Wahrscheinlichkeit, dass die Grauwerte a und b
24
gemeinsam auftreten
Die gemeinsame Entropie misst die Menge an Information, die in zwei überlagerten Bildern enthalten ist.
Nachdem erläutert wurde, wie sich die Entropie definiert und wie dieses Maß
für die Bewertung von Bilddaten verwendet werden kann, wird im nächsten
Abschnitt eine Gütefunktion vorgestellt, die auf der Berechnung der Entropie
basiert.
Mutual Information
Will man multimodale Bilddaten miteinander vergleichen, entsteht das Problem, dass dieselbe Gewebeart in den einzelnen Verfahren durch unterschiedliche Grauwerte dargestellt wird. Zum Beispiel sind die mit einem Verfahren
kontrastreich dargestellten Körperteile in anderen Bildern nicht abgebildet. Für
multimodale Daten gibt es oftmals keine einfach zu formulierende Beziehung
zwischen den Grauwerten der Bilder R und MT . Wie man dennoch Korrelationstechniken oder Bildsubstraktion auf die multimodale Registrierung anwenden kann, wird in [17] skizziert. Hier soll ein Maß betrachtet werden, welches
dazu entwickelt wurde, direkt mit den Grauwerten multimodaler Daten zu arbeiten. Es basiert auf dem im letzten Abschnitt eingeführten Informationsmaß,
der Entropie.
Unabhängig voneinander entwickelten Forscher in Leuven, Belgien (Collignon
et al. 1995 und Maes et al. 1997 [9]) und am MIT in den USA (Viola 1995 [40],
Wells et al. 1996 [44]) ein Gütemaß zur Registrierung multimodaler Bilddaten.
Wie schon beschrieben, soll mittels einer Gütefunktion G die Qualität einer
durch die Transformation T erzielten Überlagerung des Referenzbildes R mit
dem transformierten Modellbild MT bewertet werden.
Mittels der Gütefunktion Mutual Information I versucht man die gemeinsame
Entropie H(R, MT ) der Bilder R und MT zu minimieren. Gleichzeitig soll die
Information in den einzelnen Bildern erhalten bleiben; das heißt H(R) und
H(MT ) müssen groß bleiben:
I(R, MT ) = H(R) + H(MT ) − H(R, MT )
(2.6)
KAPITEL 2. GRUNDLAGEN
H(R):
25
Entropie des Referenzbildes R
T
Entropie des transformierten Modellbildes MT
H(M ):
H(R, MT ): gemeinsame Entropie des sich nach der Transformation T
überlappenden Teils der Bilder R und MT
Abbildung 2.6 veranschaulicht die jeweiligen Entropien der Bilder R und MT ,
die gemeinsame Entropie sowie Mutual Information aus mengentheoretischer
Sicht.
I(R,MT)
H(MT)
H(R)
Einfache Entropien
H(R,MT)
Gemeinsame Entropie
H(R MT)
H(MT R )
Mutual Information
Abbildung 2.6: Mengentheoretische Darstellung der einzelnen Entropien (aus
[38]).
Addiert man die die Werte der einzelnen Entropien verkörpernden Kreise (linke
Seite in Abb. 2.6) und subtrahiert die gemeinsame Entropie (mittlere Figur), so
bleibt die schraffiert dargestellte Fläche (rechts in Abb. 2.6) übrig. Die Fläche
stellt den Wert des Maßes Mutual Information dar.
Durch Einsetzen von (2.4) und (2.5) in Formel 2.6 ergibt sich für die Entropie
I eines Referenzbildes R und eines transformierten Modellbildes MT :
I(R, MT ) =
XX
r
pR,M T (r, m) log2
m
pR,M T (r, m)
pR (a) · pM T (b)
∀r, m ∈ IR , IM T . (2.7)
Dieses Maß wurde erstmalig in der Informationstheorie von Shannon (1948) als
Anteil der übertragenen Information“ beschrieben. Der Wert von I(R, MT ) für
”
zwei Bilder R und MT ist abhängig von der vorher durchzuführenden Transformation T , die das Modellbild M in den Definitionsbereich des Referenzbildes
transformiert.
Verwendung von Mutual Information als Gütefunktion Will man I als
Gütefunktion während der Registrierung zweier Bilder R und M verwenden,
muss man folgendermaßen vorgehen:
KAPITEL 2. GRUNDLAGEN
26
Das Modellbild M wird mit der geometrischen Transformation T in den Definitionsbereich des Referenzbildes R abgebildet.
Danach werden die Histogramme der resultierenden Teilbilder R, MT und des
sich nach angewendeter Transformation ergebenden Überlappungsbildes berechnet. Das Überlappungsbild besteht aus all denjenigen Punkten xR ∈ ΩR , für
die sowohl die das Referenzbild beschreibende Abbildung R(xR ) als auch die
das transformierte Modellbild beschreibende Abbildung M T (xR ) definiert sind.
Da die Referenz R während der Registrierung konstant bleibt, muss das Histogramm nur einmal bestimmt werden.
Aus den Histogrammen werden die Wahrscheinlichkeiten der einzelnen in den
Bildern enthaltenen Grauwerte ermittelt. Nach Berechnung der Grauwertwahrscheinlichkeiten lässt sich I(R, MT ) durch Einsetzen der Wahrscheinlichkeiten
in Formel 2.7 berechnen.
Auf diese Weise wird ein Maß für die Güte der mittels T erzielten Überlagerung
berechnet. Wie der folgende Abschnitt zeigen wird, ist die Gütefunktion Mutual
Information nicht immer zur Bewertung der Überlagerungsqualität geeignet.
Normalized Mutual Information
Mutual Information löst das Problem der Überlagerungsbewertung nicht in
jedem Fall gut. Homogene Bildanteile, z.B. Hintergrund, können einen überproportional großen Einfluß auf Mutual Information ausüben. Die Größe des
Überlappungsbildes ist vom Ergebnis der Transformation abhängig.
Abbildung 2.7 soll veranschaulichen, wann die Überlagerungsbewertung mit I
zu Problemen führt.
Die beiden Transformationen T1 und T2 sind jeweils eine einfache Rotation
um das Zentrum des Bildes M mit dem Rotationswinkel ϕ1 = π und ϕ2 =
π/2. Der untere Teil von Abbildung 2.7 zeigt das Referenzbild R mit dem
jeweils gestrichelt gezeichneten transformierten Modellbildern sowie den grau
dargestellten Überlappungsbildern. Im oberen Teil von Abbildung 2.7 ist der
berechnete Wert von Mutual Information für beide Transformationen I1 und I2
als schraffierte Fläche dargestellt.
Vernachlässigt man den Hintergrund der Bilder, besteht das Modellbild M aus
einem einzigen Objekt — einem Kreis. Ein Kreis verhält sich gegenüber einer
Rotation um seinen Mittelpunkt invariant. Wird M jeweils mit ϕ1 = π und
ϕ2 = π/2 rotiert, lässt sich vermuten, dass keine der beiden Rotationen besser
KAPITEL 2. GRUNDLAGEN
27
I2
I1
Entropien:
Transformation T1
R
Transformation T2
R
Überlappung
der Bilder:
M(T1 )
M(T2)
Abbildung 2.7: Zwei unterschiedliche Transformationen T1 und T2 sollen für die
Bilder R und M bewertet werden. Das sich ergebende Überlappungsbild wurde
jeweils grau gekennzeichnet. Aus [38]
bewertet wird.
Wird I(R, MT ) maximiert, werden die einzelnen Entropien der Bilder R und
MT maximal. Die gemeinsame Entropie H(R, MT ) wird minimiert. H(MT )
und H(R, MT ) hängen jedoch von der jeweiligen Transformation und der sich
daraus ergebenden Überlappung der Bilder ab. Somit bewirkt eine Veränderung
des Hintergrundes eine Änderung in I.
Der Einfluß des Hintergrundes wird so groß, dass Mutual Information letzten
Endes die schlechtere Transformation T2 besser bewertet als T1 (I2 > I1 ). Dies
führt letztendlich zu einem schlechten Registrierungsergebnis.
Zur Vermeidung dieses Problems wurde von Studholme et al. eine Normalisierung von Mutual Information bezüglich der gemeinsamen Entropie vorgeschlagen [38]. Durch die Modifikation wird das neue Gütemaß unabhängig von der
Größe des sich nach einer Transformation ergebenden Überlappungsbildes. Dies
wird erreicht, indem das Verhältnis der einzelnen Entropien zweier Bilder zur
gemeinsamen Entropie der beiden Bilder berechnet wird.
Die Formel der neuen Gütefunktion Normalized Mutual Information Y lautet
folgendermaßen:
Y (R, MT ) =
H(R) + H(MT )
H(R, MT )
KAPITEL 2. GRUNDLAGEN
P
=
r
P
pR (r) log2 pR (r) + m pM T (m) log2 pM T (m)
P P
r
m p(R,M T ) (r, m) log2 p(R,M T ) (r, m)
28
(2.8)
Y (A, B) hat sich besonders bei der Registrierung multimodaler Daten, welche
große Schwankungen in der Überlappung hatten, als sehr robust im Vergleich
zu I(A, B) erwiesen (vgl. [9], [38], [40] oder [44]).
Mit den in diesem Kapitel vorgestellten Gütefunktionen Mutual Information
und Normalized Mutual Information kann die Qualität der durch eine geometrische Transformation T erzielten Überlagerung zweier Bilder R und MT
bewertet werden.
Nachdem die Gütefunktion bestimmt wurde, muss dem Schema aus Abbildung 2.5 folgend die geometrische Transformation T bestimmt und mittels der
gewählten Gütefunktion optimiert werden. Im nächsten Abschnitt werden verschiedene Transformationen und ihre Eigenschaften vorgestellt.
2.3.4
Geometrische Transformationen
Ziel der Registrierung zweier Bilder ist die Anwendung einer Transformation T
auf das Modellbild M, so dass im Überlappungsbild von R und MT anatomisch
korrespondierende Punkte auch räumlich übereinanderliegen.
Nachdem erläutert wurde, wie die Qualität einer angewendeten Transformation
bewertet werden kann, beschäftigt sich der letzte Teil dieses Kapitels mit den
Eigenschaften und Berechnungsvorschriften für die am häufigsten zur Bildregistrierung verwendeten geometrischen Transformationen. Die in dieser Arbeit
verwendeten Transformationen werden detailliert erläutert.
Unterteilung der anwendbaren Transformationen
Dem Schema von van den Elsen folgend (vgl. [39]) werden die Transformationen
nach dem Grad ihrer Elastizität unterteilt.
Definitionsbereich der Transformation Eine Transformation kann auf
das komplette Bild angewendet werden. Sie wird dann als global bezeichnet.
Einen andere Möglichkeit sind lokale Transformationen. Dabei wird das Bild
in Teilbilder unterteilt; diese Teilbilder werden dann jeweils getrennt transformiert.
KAPITEL 2. GRUNDLAGEN
29
Elastizitätsgrad der Transformation Van den Elsen et al. teilen die Transformationen entsprechend ihrer Elastizitätsgrade in rigide, affine, projektive und
kurvige Transformationen ein.
Rigide Transformationen Trigid Eine Transformation T wird als rigid
(starr) bezeichnet, wenn der Abstand für beliebige Punkte des Ursprungsbildes
A im transformierten Bild AT erhalten bleibt ([39]).
Affine Transformationen Taffin Affine Transformationen, die die Gruppe
der rigiden Transformationen beinhalten, erhalten den Abstand zwischen zwei
beliebigen Punkten nicht mehr. Jedoch wird bei einer affinen Transformation
jede gerade Linie wieder auf eine gerade Linie abgebildet. Dabei bleibt die
Parallelität erhalten.
Projektive Transformationen Tproj Die den affinen Transformationen
übergeordnete Gruppe der projektiven (oder perspektivischen) Transformationen bildet ebenfalls alle geraden Linien auf gerade Linien ab. Die Parallelität
muss nicht erhalten bleiben.
Kurvige Transformationen Tkurv Die elastischste Gruppe der Transformationen bilden die kurvigen Transformationen. Diese können eine gerade Linie
in eine Kurve transformieren.
Die Klassen sind mathematisch abgeschlossen
Trigid ⊂ Taffin ⊂ Tproj ⊂ Tkurv .
In dieser Arbeit kommen sowohl einfache rigide Transformationen als auch komplexe kurvige Transformationen zum Einsatz. Die verwendeten Transformationen werden im Folgenden vorgestellt.
2.3.5
Rigide und affine Transformationen
Rigide Transformationen Rigide Transformationen setzen sich aus Translationen und Rotationen zusammen. Für einen Punkt x aus einem zweidimensionalen Bild lautet die Berechnungsvorschrift der rigiden Transformation:
y = t + Rx ,
(2.9)
KAPITEL 2. GRUNDLAGEN
30
wobei x, y und t jeweils zweidimensionale Vektoren sind. y stellt den transformierten Punkt im Zielbild dar. t ist der Translationsvektor. R ist die 2 × 2–
Rotationsmatrix
Ã
R=
cos ϕ − sin ϕ
sin ϕ
!
,
cos ϕ
(2.10)
durch die ein Bild um den Winkel ϕ rotiert wird. Die Rotationsmatrix einer
rigiden Transformation muss zwei zusätzliche Bedingungen erfüllen (vgl. [43]).
Sie muss orthonormal sein, also muss
RT R = id
(2.11)
gelten. Zweitens muss sie eine echte Rotation darstellen, keine Invertierung oder
Spiegelung, was durch die Forderung
det R = 1
(2.12)
ausgedrückt wird.
Affine Transformationen Erweitert man die erlaubten Transformationen
und lässt zusätzlich eine Skalierung zu, erhält man eine affine Transformation.
Die Berechnungsvorschrift einer beliebigen affinen Transformation Taffin für die
Punkte x eines zweidimensionalen Bildes lautet wie folgt:
Taffin (x) = y = t + Ax,
(2.13)
wobei x, y und t wieder zweidimensionale Vektoren sind. y ist wieder der transformierte Punkt im Zielbild. t ist der Translationsvektor. A ist die reellwertige
2 × 2–Matrix
Ã
A=
a11 a12
a21 a22
!
,
(2.14)
Ein weiteres Beispiel für eine affine Transformation ist die Scherung. Sie wird
so gut wie nie verwendet und hat deshalb hier keine Bedeutung.
KAPITEL 2. GRUNDLAGEN
31
Berechnung rigider/affiner Transformationen für dreidimensionale
Bilder Die Abbildungsvorschriften 2.9 beziehungsweise 2.13 für rigide/affine
Transformationen von 2D–Bildern können ohne Änderung in der vorliegenden
Form für die Berechnung der Transformation von 3D–Bildern übernommen werden. Man beachte lediglich, dass alle in den Formeln aufgeführten Vektoren
jetzt dreidimensional sind. Gleiches gilt für die Matrizen R und A, welche jetzt
3 × 3–Matrizen sind. Die Berechnungsvorschrift für die affine Transformation
der Punkte x eines 3–dimensionalen Bildes lautet wie bereits in Formel 2.13:
Taffin (x) = y = t + Ax.
(2.15)
Lediglich die Dimension der Parameter ändert sich.
Homogene Koordinaten
Bei der sukzessiven Anwendung mehrerer affiner Transformationen erschwert
sich die eben vorgestellte Berechnungsweise. Zwei affine Transformationen sollen
hintereinander angewendet werden:
T1 (x) = t1 + A1 x und
T2 (x) = t2 + A2 x.
x, y und z sind Punkte des Bildes, A1 , A2 , t1 und t2 sind die Parameter der
zwei affinen Abbildungen. Werden beide Abbildungen miteinander verknüpft,
ergibt sich
T2 (T1 (x)) = [t2 + Bt1 ] + BAx .
Wie zu erkennen ist, erschwert sich die Berechnung deutlich.
Durch Verwendung einer 4 × 4–Matrix vereinfacht sich die Verknüpfung affiner
Transformationen (vgl. [6]). Die Gleichung Taffin (x) = t + Ax wird zu
Ã
! Ã
!Ã
!
x
A t
x
=
,
(2.16)
Taffin
1
ot 1
1
mit ot = (0, 0, 0) erweitert. Die vorherige Vektoraddition des Vektors t, der eine
Translation (Verschiebung) der Bildpunkte darstellt, wird jetzt ebenfalls über
eine Matrixmultiplikation realisiert.
Die Koordinaten der 3D–Bilder werden zu homogenen Koordinaten erweitert:
(x, y, z) 7→ (x, y, z, 1) .
(2.17)
KAPITEL 2. GRUNDLAGEN
32
Affine Transformationen dreidimensionaler Bilder können immer als Multiplikation der homogenen Koordinaten mit einer 4 × 4–Transformationsmatrix M
geschrieben werden:
Ã
Taffin
x
1
!
Ã
=M
x
!
mit
1
a11 a12 a13 tx
(2.18)
a21 a22 a23 ty
M =
a
a
a
t
31 32 33 z
0
0
0
1
Die Verwendung homogener Koordinaten hat den großen Vorteil, dass mehrere
Transformationsmatrizen durch Multiplikation miteinander verknüpft werden
können. Solch eine Verknüpfung bezeichnet man als Konkatenation. Die Implementierung der Transformationen wird dadurch einfacher und effizienter.
Beispiel zur Konkatenation von Transformationsmatrizen
Anhand eines Beispiels soll der Vorteil homogener Koordinaten verdeutlicht
werden. Ein Bild wird in den Koordinatenursprung verschoben und um 15◦
rotiert. Danach wird es mit Faktor 2 skaliert. Als letztes wird die initiale Transformation in den Ursprung rückgängig gemacht.
Die Transformationsmatrizen der einzelnen Transformationsschritte sehen wie
folgt aus:
Transformationsmatrix MT1 zur Verschiebung des
1 0 0 −10
0 1 0 −30
MT1 =
0 0 1 −15
0 0 0
1
Bildes in den Ursprung:
(2.19)
Transformationsmatrix MRz zur Rotation des Bildes um die z–Achse mit Rotationswinkel ϕ = 15◦ :
MRz
cos 15◦
sin 15◦
0 0
− sin 15◦ cos 15◦ 0 0
=
0
0
1
0
0
0
0 1
(2.20)
KAPITEL 2. GRUNDLAGEN
33
Transformationsmatrix MS zur Skalierung
2 0
0 2
MS =
0 0
0 0
des Bildes mit Faktor 2:
0 0
0 0
2 0
0 1
(2.21)
Transformationsmatrix MT2 zur Verschiebung des Bildes zurück in seinen Ursprung:
MT2
1 0 0 10
0 1 0 30
=
0
0
1
15
0 0 0 1
(2.22)
Für jeden Punkt x eines Bildes A ergibt sich jetzt
0
x = MT1 · MRz · MS · MT2 ·x
{z
}
|
(2.23)
M
Berechnet man die Matrix M einmal im voraus, kann man jeden Punkt mit
nur einer Matrixmultiplikation transformieren. So ergibt sich eine wesentlich
effizientere Behandlung der Bilder.
Anzahl der Parameter rigider und affiner Transformationen Wie beschrieben wurde, setzen sich rigide Transformationen aus Translationen und
Rotationen zusammen. Für dreidimensionale Bilddaten ergeben sich als wählbare Parameter der aus drei reellwertigen Komponenten bestehende Translationsvektor
Translation in x–Richtung
tx
t=
Translation in y–Richtung = ty
Translation in z–Richtung
tz
(2.24)
und der die Winkel der drei möglichen Rotationen enthaltende Rotationsvektor
Rotation um x–Achse
rx
(2.25)
r=
Rotation um y–Achse = ry .
Rotation um z–Achse
rz
Die 6 Parameter können frei gewählt werden. Für affine Transformationen
können zusätzlich noch die drei den Skalierungsvektor
Skalierung in x–Richtung
sx
s=
Skalierung in y–Richtung = sy
Skalierung in z–Richtung
sz
(2.26)
KAPITEL 2. GRUNDLAGEN
34
bildenden Skalierungsfaktoren eingestellt werden.
Somit sind die affinen Transformationen, wie beschrieben, von 9 freien Parametern abhängig.
Ist im Rahmen der Registrierung von der Optimierung der Transformation
”
T“ die Rede, so ist damit (für T = affine Transformation) das Finden der
optimalen Einstellung genau dieser 9 freien Parameter gemeint.
2.3.6
Nicht–rigide Transformationen
Im Gegensatz zu den rigiden/affinen Transformationen gestaltet sich das Gebiet
der nicht–rigiden Transformationen weniger übersichtlich. Es ist Gegenstand
der aktuellen Forschung und entwickelt sich somit sehr schnell. An dieser Stelle
sollen wichtige Lösungsideen vorgestellt werden.
Die nicht–affinen Registrierungsalgorithmen beginnen praktisch immer mit einer initialen affinen Transformation. Mit dieser versucht man einen guten Startpunkt für die darauf folgende nicht–affine Transformation zu finden.
Bei den hier vorgestellten nicht–rigiden Transformationen handelt es sich durchweg um sogenannte Free–Form Deformations“ (FFD). Darunter versteht man
”
Deformationen, die unabhängig von den transformierten Bilddaten sind. Insbesondere liegt solchen Deformationen kein Modell der physikalischen Organeigenschaften zugrunde.
Oft verwendete nicht–rigide Transformationen sind Interpolationsverfahren mit
Splines, zum Beispiel B–Splines oder Thin-Plate Splines. Des Weiteren wurde
von Davis et al. eine nicht–rigide Registrierungsmethode mit Elastic Body Splines (EBS) entwickelt [10]. Hierbei basieren die Splines auf dem physikalischen
Modell eines homogenen elastischen Körpers (vgl. [10] oder [19]). Dieses Modell
simuliert die Verformung physikalischer Objekte.
In der Arbeit kam die im Folgenden vorgestellte Thin-Plate Spline–Interpolation
zum Einsatz, da sie sehr einfach zu implementieren war.
Thin-Plate Spline–Interpolation
Eine der am häufigsten verwendeten Formen der nicht–rigiden Transformationen ist die Thin-Plate Spline–Interpolation [8]. Dabei handelt es sich um eine
landmarkenbasierte Transformation. Thin-Plate Splines gehören zur Gruppe
der radialen Basisfunktionen und wurden erstmals von Duchon [11] und Mein-
KAPITEL 2. GRUNDLAGEN
35
guet [25] verwendet. Die Transformation basiert auf der Überlagerung von Kontrollpunktpaaren.
Der Notation von Fornefett et al. [13] folgend, definiert sich die Transformation
wie im Folgenden erläutert.
Eine Transformation T basierend auf n Kontrollpunktpaaren (p1 , q1 ) bis
(pn , qn ) muss die Bedingung
T (pi ) = qi ,
i = 1, . . . , n
(2.27)
erfüllen. pi ist der Punkt im Modellbild M, während qi der korrespondierende
Kontrollpunkt im Referenzbild ist.
Für alle Punkte x = (x1 , x2 , x3 )T des zu transformierenden Modellbildes M berechnet sich die Thin-Plate Spline–Transformation TT P S mit n Kontrollpunktpaaren nach folgender Formel:
TT P S (x) = β0 + β1 x1 + β2 x2 + β3 x3 +
n
X
αi R(kx − pi k).
(2.28)
i=1
kx − pi k = krk ist der euklidische Abstand des jeweiligen Bildpunktes x zu
Kontrollpunkt pi . Die Koeffizienten der affinen Abbildung β0 , . . . , β3 sowie die
α–Koeffizienten der radialen Basisfunktionen, welche den nicht–affinen Teil der
Transformation bilden, bestimmt man durch Lösung des linearen Gleichungssystems:
Ã
K
P
PT
0
!Ã
α
β
!
Ã
=
qk
0
!
.
(2.29)
K ist der Kern gegeben durch Kij = R(kpi −pj k), und P ist die n×4–Teilmatrix
mit Pij = pji , j = 0, . . . , 3.
Die radialen Basisfunktionen R(r) für Thin-Plate Splines haben die Form:
(
RT P S (r) =
|r|2 log(|r|) für 2D–Datensätze
|r|
für 3D–Datensätze
(2.30)
Andere mögliche radiale Basisfunktionen sind beispielsweise Gausssche Basisfunktionen (mit Mittelwert µ = 0, V arianz σ ∈ R):
RGauss (r) = e−r
2 /2σ 2
.
KAPITEL 2. GRUNDLAGEN
36
Abbildung 2.8: Lokale Spline–Deformationen
Mittels solcher Interpolationen werden die jeweiligen Kontrollpunktpaare immer genau aufeinander abgebildet. Abbildung 2.8 zeigt, wie solche Spline–
Transformationen sich auf ein Bild auswirken können.
Hierarchischer Ansatz zur Landmarkenbestimmung
Die zur Durchführung einer Thin-Plate Spline–Interpolation benötigten Landmarken können manuell bestimmt werden. Dies ist jedoch sehr aufwendig. Für
einen möglichst einfachen Registrierungsprozeß wäre es gut, die Kontrollpunkte
automatisch zu finden. Hierzu haben Likar und Pernus [22] einen hierarchischen
Ansatz für die Registrierung von 2D–Daten entwickelt.
2D–Ansatz Abbildung 2.9 skizziert die prinzipielle Vorgehensweise bei der
hierarchischen Registrierung. Nachdem die beiden Ausgangsbilder Referenz R
und Modell M rigide registriert wurden (Level 1 in Abb. 2.9), beginnt die hierarchische Landmarkenberechnung. Für die rigide registrierten Bilder R und M
werden die a-priori Wahrscheinlichkeiten p∗ (R, M) für das gemeinsame auftreten zweier Grauwerte bestimmt. Die Wahrscheinlichkeiten p∗ (R, M) können
genutzt werden, um die statistische Aussagekraft der gemeinsamen Wahrscheinlichkeiten bei der Registrierung kleiner Teilbilder zu erhöhen:
λp(R, MT ) + (1 − λ)p∗ (R, M) 7→ p(R, MT )
(2.31)
Durch λ, λ ∈ [0, 1] wird das Gewichtungsverhältnis der gemeinsamen Wahrscheinlichkeit registrierter Teilbilder zur A-priori-Wahrscheinlichkeit bestimmt.
In Level 2 werden die rigide registrierten Ausgangsbilder in Teilbilder gleicher
Größe unterteilt. Diese Teilbilder werden dann mittels affiner Verfahren überla-
KAPITEL 2. GRUNDLAGEN
37
Hierarchischer Registrierungsansatz
M
R
p*(R,M)
p*(R,M)
p*(R,M)
Abbildung 2.9: Schematische Darstellung des hierarchischen nicht–rigiden Registrierungsansatzes nach Likar und Pernus [22]
gert. Für jedes Teilbild ergibt sich somit eine affine Transformation. In Level 2
(siehe Abb. 2.9) berechnet man demzufolge vier affine Transformationen Taffin
1
bis Taffin . Der Mittelpunkt pi jedes Teilbildes Ai wird dann mittels der zu4
gehörigen Transformation Taffin transformiert. Der sich ergebende Punkt
i
qi = Taffin (pi )
i
bildet zusammen mit dem ursprünglichen Mittelpunkt pi das i–te Kontrollpunktpaar (pi , qi ) für die spätere Thin-Plate Spline–Interpolation. Nachdem alle 4 Kontrollpunktpaare berechnet wurden, kann die Splineinterpolation T P ST4
KAPITEL 2. GRUNDLAGEN
38
durchgeführt werden.
Es wird mit Level 3 fortgefahren, in der die Unterteilung verfeinert wird. Jedes
der Teilbilder aus dem vorherigen Arbeitschritt wird wiederum in 4 Teilbilder
unterteilt und rigide registriert. Es werden wiederum die Kontrollpunkte mittels
Transformation der Bildmittelpunkte berechnet. In Level 3 ergeben sich somit
16 Kontrollpunkte. Mit diesen wird die Splineinterpolation T P ST16 berechnet.
Im nächsten Arbeitsschritt kann weiter verfeinert werden usw.
Dieser Ansatz dient zur Registrierung von zweidimensionalen Bildern. Für den
dreidimensionalen Einsatz wurde das Schema leicht modifiziert.
3D–Ansatz Die Volumina werden, wie in Abbildung 2.10 angedeutet, in jeweils 8 gleich große Teilwürfel unterteilt.
Abbildung 2.10: Hierarchische Unterteilung der Daten im 3D–Fall
Danach werden die Würfel des Modellvolumens mit den Teilwürfeln der Referenz rigide registriert. Die Mittelpunkte der rigide registrierten Teilwürfel
dienen dann wie bei Likar als Kontrollpunkte für die Thin-Plate Spline–
Interpolation. Es folgt der nächste Verfeinerungsschritt.
Der erste Verarbeitungsschritt ist wiederum die Durchführung einer rigiden
Registrierung.
Kontrollpunktwahl
Die Transformation selbst wird sehr stark von der Wahl der Kontrollpunkte
beeinflusst. So zeigt sich vor allem im Dreidimensionalen, dass man den affinen
Transformationsanteil manuell begrenzen muss. Dies geschieht durch zusätzlich
vorgegebene Kontrollpunktpaare, die sich praktisch als Bounding Box“ inter”
pretieren lassen. Die Punkte entsprechen den Ecken der beiden zu registrierenden Volumina. Durch diese Kontrollpunkte wird gewährleistet, dass sich die
KAPITEL 2. GRUNDLAGEN
39
Transformation lediglich auf das Innere des Volumens auswirkt.
2.4
Zusammenfassung
Dem Leser wurden in diesem Kapitel grundlegende Fakten über die behandelte
Problematik und den Stand der Technik im Bereich der Registrierung medizinischer Bilddaten vorgestellt. Physiologische und anatomische Grundlagen,
wie Lage und Bau der Leber, wurden erläutert. Mögliche Therapieformen von
Lebermetastasen, insbesondere die Strahlentherapie, wurden vorgestellt und beschrieben.
Im nächsten Kapitel soll auf das Format und die Besonderheiten der zu registrierenden Rohdatensätze eingegangen werden. Im Hinblick auf die Aufgabenstellung wird dabei besonders auf Details eingegangen, die diese Studie beeinflussen
könnten.
Kapitel 3
Patientendaten und Phantome
Bei der Entwicklung eines Verfahrens zur Registrierung von Volumendaten
hängt der einzuschlagende Lösungsweg oftmals stark von den zu registrierenden
Daten ab. Um einen sinnvollen und guten Lösungsansatz zu finden, sollen in
diesem Kapitel die zur Verfügung stehenden Daten genau analysiert werden.
Zu diesem Zweck werden zuerst die aufnahmebedingten Eigenschaften, wie
Auflösung und Größe der Volumina, betrachtet und verglichen. Danach werden die Besonderheiten der Daten in Abhängigkeit von der Aufnahmemodalität genauer beleuchtet. Hierbei wird sowohl auf physikalische Eigenschaften,
wie zum Beispiel durch die Aufnahmeapparatur erzeugte Artefakte, als auch
auf anatomische Besonderheiten geachtet.
Die größte Besonderheit der Datensätze ist die schon erwähnte Bauchplatte. Die
sich aus der Abdominalkompression ergebenden Deformationen im CT sollen
ausführlich behandelt werden.
Definition der verwendeten Schnittbildbezeichnungen
Im Folgenden werden immer wieder verschiedene Schnittbilder gezeigt. Die einzelnen Bezeichnungen werden hier definiert. Es gibt drei wichtige Schnittebenen
die sich durch Kombination der folgenden drei Hauptachsen des Körpers bilden
lassen:
Die Hauptachsen des Körpers (vgl. [35])
Die Longitudinalachse ist die Körperlängsachse und verläuft von den
Füßen zum Kopf.
KAPITEL 3. PATIENTENDATEN UND PHANTOME
41
Die Horizontalachse steht senkrecht auf der Longitudinalachse und verläuft
von links nach rechts. Sie wird auch als Querachse bezeichnet.
Die Sagittalachse verläuft von der Hinter– zur Vorderfläche des Körpers
und steht jeweils senkrecht zu den beiden vorher genannten Achsen.
Daraus lassen sich drei Schnittebenen kombinieren.
Die Schnittebenen des Körpers
Eine Sagittalebene wird durch die Longitudinal– und Sagittalachse gebildet.
Eine Frontalebene ist eine parallel zur Stirn liegende Ebene. Sie wird aus
Longitudinal– und Horizontalachse gebildet.
Eine Transversalebene lässt sich aus Sagittal– und Horizontalachse bilden.
Steht der Mensch aufrecht, liegt eine Transversalebene quer.
Im Weiteren werden die Begriffe der Transversal–, Sagittal– und Frontalschnitte
verwendet. Die Bezeichnungen der Schnittbilder werden vom Namen der, dem
Bild, zugrundeliegenden Schnittebene abgeleitet.
3.1
Erläuterung der Patientendatensätze
Die zu registrierenden Volumina wurden mit unterschiedlichen bildgebenden
Verfahren aufgenommen. Sie unterscheiden sich in ihrer Auflösung und der Gesamtgröße. Vor allem in axialer Richtung (entlang der Achse vom Steißbein zum
Kopf) ist ein CT–Bild deutlich höher aufgelöst als eine MRT–Aufnahme. Die
Kenngrößen für die in der Arbeit verwendeten Datensätzen sind im folgenden
Abschnitt aufgeführt.
3.1.1
Eigenschaften der Daten
Für die Durchführung der Arbeit wurden vom Deutschen Krebsforschungszentrum Heidelberg zwei vollständige Patientendatensätze zur Verfügung gestellt.
Ein vollständiger Patientendatensatz besteht aus zwei Volumina, einem Magnetresonanztomogramm und einem Computertomogramm. In den Tabellen 3.1
KAPITEL 3. PATIENTENDATEN UND PHANTOME
42
und 3.2 sind die Größe und die Auflösung der beiden Datenensätze pat gk und
pat bb aufgelistet.
pat gk
MRT
CT
Transversale Auflösung
6 mm
3 mm
1.641 mm
0.977 mm
Dimension (in Pixel)
256 x 256 x 16
512 x 512 x 73
Dimension (in mm)
420 x 420 x 96
500 x 500 x 219
Sagittale und
frontale Auflösung
Tabelle 3.1: Parameter des Volumendatensatzes pat gk
pat bb
MRT
CT
Transversale Auflösung
7.5 mm
3 mm
1.25 mm
0.977 mm
Dimension (in Pixel)
256x256x19
512x512x67
Dimension (in mm)
320 x 320 x 142
500 x 500 x 201
Sagittale und
frontale Auflösung
Tabelle 3.2: Parameter des Volumendatensatzes pat bb
Man beachte den Längenunterschied der z–Achse der beiden Volumina. Das
MRT enthält nicht die komplette Leber.
Die Abbildungen 3.1 und 3.2 sollen einen Eindruck darüber vermitteln, wie
die unverarbeiteten Rohdaten aussehen. Man erinnere sich stets daran, dass es
sich immer um 3D–Daten handelt. Da 3D–Daten jedoch schlecht darstellbar
sind, wird im Laufe dieser Arbeit die übliche Darstellung einzelner Schichten
verwendet.
Es fällt sofort ins Auge, dass in den Schichtbildern nicht nur Körpergewebe
KAPITEL 3. PATIENTENDATEN UND PHANTOME
CT
43
MRT
Abbildung 3.1: Frontalschnitte (oben) und Transversalschnitte (unten) aus Rohdatensatz pat gk
dargestellt wird. In Abbildung 3.2 sind die den Körper umgebenden Teile der
Lagerungsvorrichtung der Bestrahlungsapparatur gut zu erkennen.
Betrachtet man die Abbildung 3.2, wird vor allem der Unterschied in der
Auflösung zwischen MRT und CT deutlich. Vor allem die axiale z–Kantenlänge
der Voxel — also die Länge entlang der Longitudinalachse — ist im MRT mehr
als doppelt so groß (vgl. Tabelle 3.2). Dies wird vor allem im Frontalschnitt
deutlich.
3.1.2
Erkennung des Tumors
Es soll nun ein Eindruck vermittelt werden, wie Lebermetastasen aussehen. Im
Datensatz pat gk konnte für beide Volumina der Tumor identifiziert werden.
Abbildung 3.4 zeigt den relevanten Ausschnitt der Schichtbilder mit dem segmentierten Tumor.
Die unterschiedliche Position wird aus Abbildung 3.3 gut ersichtlich. Zusätzlich zeigt Abbildung 3.4 die segmentierte Leber der CT Aufnahme mit beiden
KAPITEL 3. PATIENTENDATEN UND PHANTOME
CT
44
MRT
Abbildung 3.2: Gesamtdarstellung der Frontalschnitte (oben) und Transversalschnitte (unten) aus Rohdatensatz pat bb
CT
MRT
Abbildung 3.3: Auschnitte aus transversalen Schichtbildern des Datensatzes
pat gk mit dem zweimal segmentierten Tumor. Der im CT segmentierte Tumor
ist gelb dargestellt; der Tumor des MRT lila.
segmentierten Tumoren. Es wird deutlich, wie die Abbildung des Tumors in
y–Richtung verschoben ist. Des Weiteren fällt auf, dass die Form des Tumors
in beiden Bildern sehr ähnlich ist. Daraus folgernd lässt sich vermuten, dass
KAPITEL 3. PATIENTENDATEN UND PHANTOME
45
die Form der Tumoren von der Deformation des Bauchraumes im Wesentlichen
unbeeinflusst bleibt. Der Tumor hat im CT lediglich eine andere Position.
Abbildung 3.4: Im CT segmentierte Leber (pat gk ) mit Tumoren aus CT (gelb)
und MRT (lila)
Im Datensatz pat bb konnte kein Tumor segmentiert werden.
3.1.3
Besonderheiten der CT–Daten durch Abdominalkompression
Die CT–Aufnahmen haben eine hohe Auflösung (siehe Tab. 3.1 und 3.2). Die
Wirbelsäule und die Rippen sind sehr gut zu erkennen. Innere Gewebestrukturen dagegen werden eher schlecht abgebildet. So erscheint die Leber zum
Beispiel als weitgehend homogenes Gewebe.
Abdominalkompression
Der Bauchraum wird während der Planungs– und Therapiephasen mittels einer
Bauchplatte komprimiert, um die Position des Tumors möglichst exakt bestimmen zu können. Sämtliche Organe des Bauchraumes werden dadurch verschoben und deformiert. Abbildung 3.5 zeigt ein segmentiertes CT–Volumen mit
Bauchplatte. Die starke Komprimierung des Bauchraumes ist gut zu erkennen.
Die Leber wird im Bauchraum nach hinten in Richtung der Wirbelsäule bzw. des
KAPITEL 3. PATIENTENDATEN UND PHANTOME
46
Abbildung 3.5: Links: Segmentierte Körperhülle (blau) und Bauchplatte des
CT–Volumens (gelb) aus pat gk ; rechts: Segmentierter Leber (blau) mit
Körperhülle (blau) und Platte zur Kompression (rot)
Rückens verschoben (Abbildung 3.6, R1 ). Sie wird in y–Richtung verschoben.
Es ist gut zu erkennen, wie die Leber im CT am hinteren Brustkorb anliegt
und ihn im MRT nicht berührt. Zusätzlich bewegt sie sich noch nach oben in
Richtung der Lunge (z–Translation). Es findet auch eine x–Verschiebung statt;
diese ist relativ gering.
CT
R2
R1
MRT
R2
R1
Abbildung 3.6: Auswirkungen der Abdominalkompression im Vergleich zum
MRT. Zu sehen sind zwei transversale Schichten, welche die gleiche anatomische
Region darstellen.
Neben der Bewegung an sich findet ebenfalls eine Deformation statt. Vor allem
der vordere an die Bauchdecke grenzende Teil der Leber wird deformiert. In
Abbildung 3.6 ist dieser Bereich als R2 gekennzeichnet. In Hinsicht auf die an-
KAPITEL 3. PATIENTENDATEN UND PHANTOME
47
zuwendende Transformation bedeutet dies, dass man die durch die Bauchplatte
verursachten Deformationen nur mit nicht–rigiden Transformationen modellieren kann.
Um die verschiedenen Verschiebungen und Deformationen deutlich zu machen,
wurde die Leber im CT und MRT des Datensatzes pat gk komplett segmentiert. Vorher wurden die beiden Volumina interaktiv, also manuell, registriert.
Dazu wurden die Körperhüllen in x– und y–Richtung in Übereinstimmung gebracht. Zusätzlich wurde die z–Translation bestimmt. Abbildung 3.7 zeigt die
beiden segmentierten Volumina. Der Unterschied in der Größe der dargestellten
Volumina fällt hier besonders ins Auge. Die eingetragenen Messungen machen
deutlich, daß vor allem in y–Richtung eine sehr starke Verschiebung stattfindet.
Diese Verschiebung ist jedoch keine starre Transformation, sondern entsteht zu
einem großen Teil als Folge einer elastischen Deformation.
Entstehung der Deformation Die Bauchplatte komprimiert das Abdomen
in der Mitte und erzeugt so einen Druck auf die Leber. Hätte die Leber Platz um
in alle Richtungen gleichmäßig zu entweichen, würde sie sich nach hinten und
auch seitwärts bewegen. In Abbildung 3.6 ist gut zu erkennen, dass die Leber
auch im MRT an den Rippen anliegt. Sie kann sich also nur minimal seitwärts
bewegen. Somit wird die Leber deformiert. Durch die Deformation bewegt sie
sich weiter in Richtung des Rückens.
15 mm
7 mm
12 mm
50 mm
Abbildung 3.7: Frontal– und Seitenansicht der segmentierten Lebervolumina
(blau: LeberCT , rot: LeberM R )
KAPITEL 3. PATIENTENDATEN UND PHANTOME
3.1.4
48
Besonderheiten der MRT–Daten
Im MRT wird im Fall der beiden Datensätze pat gk und pat bb nicht die komplette Leber dargestellt.
Am auffälligsten ist die schlechte Auflösung der MRT–Bilder in z–Richtung. Sie
liegt bei Werten ≥ 6 mm. Dieser Wert begrenzt die Genauigkeit der Registrierung. Die Grauwerte einer Schicht sind stets Mittelwerte aller in dieser einen
Schicht vorkommenden Intensitäten. Hierbei spricht man vom Teilvolumeneffekt, der bei sämtlichen bildgebenden Verfahren auftritt.
Durch den Teilvolumeneffekt können im MRT Kanten verwischen, die im CT
deutlicher erkennbar sind. Beim Entwurf der Registrierung muss dieses Problem
berücksichtigt werden.
3.2
Konstruktion der Phantomdatensätze
Während der Entwicklung einzelner Registrierungsverfahren ist es immer wieder
nützlich, diese an künstlich konstruierten Phantomdatensätzen zu validieren.
Gleichzeitig dienen solche Phantome als gute Kontrolle der Implementierung
selbst.
3.2.1
2D–Phantome
Die verwendeten zweidimensionalen Phantome wurden auf die Entwurfsphase
der elastischen Registrierungsalgorithmen zugeschnitten. Sie dienen zu Testzwecken und zur Validierung.
Datensatz: PHANTOM SIMPLE
Abbildung 3.8 zeigt das erste 2D–Phantom.
Dieses Phantom wurde in Hinblick auf den Entwurf der nicht–rigiden Registrierung mit Thin-Plate Splines entworfen. Es sollen später Landmarken definiert
werden, die das Quadrat in eine Ellipse transformieren.
Datensatz PHANTOM COMPLEX
Dieser Datensatz ist komplexer als das erste Phantom. Abbildung 3.9 zeigt den
zweiten Datensatz PHANTOM COMPLEX. Er ist vor allem daraufhin ausgelegt,
KAPITEL 3. PATIENTENDATEN UND PHANTOME
Referenz
49
Modell
Abbildung 3.8: Einfacher Phantomdatensatz
kleinere lokale Deformationen zu modellieren. Der Datensatz wurde zur Validierung dieses Registrierungsverfahrens nach Likar (vgl. citelikar) entworfen.
Im Hinblick auf das verwendete Gütemaß — Normalized Mutual Information Y — wurden die geometrischen Figuren mit unterschiedlichen Grauwerten
eingefärbt. Dies modelliert die Multimodalität der Bilder.
Referenz
Modell
Abbildung 3.9: Komplexerer Phantomdatensatz zur Modellierung lokal elastischer Deformationen
3.2.2
3D-Phantom
Abbildung 3.10 zeigt den dreidimensionalen Phantomdatensatz 3D PHANTOM.
Das Modell stellt einen Ausschnitt des Referenzvolumens dar. Die Idee ist den
beiden Datensätzen pat gk und pat bb entliehen. Das MRT stellt dort auch nur
einen Teil des CT dar. Es muss eine z–Verschiebung gefunden werden, die das
KAPITEL 3. PATIENTENDATEN UND PHANTOME
Referenz
50
Modell
Abbildung 3.10: 3D Phantom für rigide Registrierung
MRT auf Höhe des korrekten Teilvolumens im CT transformiert. Das Finden
dieser z–Transformation ist Teil der rigiden Registrierung. Dieser Phantomdatensatz wurde also vor allem zum Testen der rigiden Registrierungsalgorithmen
entworfen. Zusätzlich wurde das Modell um 5◦ um die z–Achse rotiert. Die
Grauwerte wurden in Hinsicht auf die Registrierung multimodaler Daten im
Modell ebenfalls modifiziert.
3.3
Zusammenfassung
Es wird deutlich, dass die Leber in beiden Volumina ein sehr unterschiedliches
Erscheinungsbild hat. Die Tatsache, daß im MRT nicht die komplette Leber
dargestellt ist, kann die anstehende Registrierungsaufgabe erschweren. Inwiefern
die starke Kompression des Bauchraumes ein automatisches Registrieren der
beiden Volumina zulässt, soll untersucht werden.
Beim Entwurf von Registrierungsverfahren für die hier behandelten Volumendaten fallen die folgenden Eigenschaften der Daten besonders ins Gewicht:
Modalität Die Datensätze sind multimodal. Daraus folgt, daß ein grauwertbasiertes Gütemaß wie die Korrelation der Grauwerte nicht ohne Transformation der Grauwertintensitäten verwendet werden kann. Da die Definition einer
solchen Intensitätstransformation sehr schwierig ist, soll stattdessen Mutual Information zum Einsatz kommen.
KAPITEL 3. PATIENTENDATEN UND PHANTOME
51
Bildinhalt Die nicht zum Körpergewebe gehörenden sichtbaren Teile (Bestrahlungsapparatur) können sich störend auf die Registrierung auswirken. Es
ist daher besser, die Volumina vorzuverarbeiten und dabei diese Strukturen zu
entfernen. Die Leber ist im MRT unvollständig. Dies erschwert segmentierungsbasierte Registrierungsansätze, also Verfahren, bei denen die Volumen zuerst in
ihre anatomischen Strukturen zerlegt und diese Strukturen dann überlagert
werden. Man kann nur die Strukturen überlagern, die auch in beiden Bildern
vorhanden sind.
Die größte Schwierigkeit ist jedoch bei der Modellierung der durch die Abdominalkompression erzeugten Deformationen zu erwarten.
Auflösung Die unterschiedliche Auflösung macht ein Resampling der Daten
— Neuabtastung der Bilder mit anderer Abtastrate — im Rahmen der Vorverarbeitung erforderlich.
Aufbauend auf diesen Erkenntnissen sollen im folgenden Kapitel die verwendeten Registrierungsansätze erläutert werden.
Kapitel 4
Realisierung der
Registrierungsstudie
In diesem Kapitel soll die Vorgehensweise bei der Durchführung der Registrierungsstudie erläutert werden. Ausgehend von den im letzten Kapitel beschriebenen Bilddatensätzen wird ein Verfahren entwickelt, mit dessen Hilfe die MRT–
Daten mit den CT–Daten überlagert werden können. Die Idealvorstellung einer
solchen Registrierung wäre, dass man nach der Datenakquisition zwei Rohdatensätze — ein MRT und ein CT — vorliegen hat und diese ohne weitere
Interaktion automatisch registriert. Inwieweit man dieser idealisierten Vorstellung nahekommen kann und auf welche Weise das Registrierungsproblem gelöst
werden soll, ist Inhalt dieses Kapitels. Dazu werden die Daten in einem ersten
Schritt vorverarbeitet. Danach wird ein in zwei Stufen unterteiltes Registrierungsverfahren entwickelt. In der ersten Stufe soll mittels starrer Transformationen eine erste rigide Registrierung der kompletten Körpervolumina erzielt
werden. Ziel dabei ist vor allem eine gute Übereinstimmung in Richtung der
Körperlängsachse zu finden. Im zweiten Schritt der Registrierung sollen danach
lokale Deformationen mittels nicht–rigider Transformationen modelliert werden.
Das verwendete Verfahren zur Durchführung von nicht–rigiden Transformationen ist die Spline–Interpolation bzw. –Approximation, die auf einer Menge von
Kontrollpunktpaaren basiert. Wie solche Kontrollpunkte automatisch bestimmt
werden können wird ebenfalls in diesem Kapitel erläutert.
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
4.1
53
Prinzipielles Vorgehen
Wünschenswert wäre ein System, welches als Eingabe die MRT– und die CT–
Volumendaten erhält, diese automatisch fusioniert und das sich daraus ergebende modifizierte Magnetresonanztomogramm ausgibt.
Im Vordergrund dieser Arbeit stand die Frage, inwiefern eine Registrierung der
MRT– und CT–Daten der Leber überhaupt möglich ist.
Ausgehend von dem in Kapitel 2.3.2 vorgestellten Grundschema der Registrierung, soll ein Ansatz verfolgt werden, welcher aus zwei Phasen besteht (siehe
Abb. 4.1).
CT
MRT
Vorverarbeitung
Rigide Registrierung
Nicht-rigide Registrierung
Registriertes MRT
Abbildung 4.1: Zweistufiger Registrierungsansatz mit zusätzlicher Vorverarbeitung
Im ersten Schritt soll mittels rigider bzw. affiner Transformationen eine grobe
Überlagerung erzielt werden. Diese erste Registrierung soll als Startpunkt für
die als zweite folgende nicht–rigide Registrierung dienen. Mit diesem zweiten
nicht–rigiden Registrierungsschritt sollen vor allem die lokalen Deformationen
des weichen Gewebes erfasst und modelliert werden.
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
4.2
54
Vorverarbeitung der Volumendaten
Vor dem Durchführen der Registrierung müssen die Volumendaten in einem
ersten Schritt vorverarbeitet werden. Ziel dieser ersten Verarbeitungsstufe ist
es, die beiden Volumina in ein Format zu bringen, welches es ermöglicht, sie in
den folgenden Registrierungsschritten miteinander zu vergleichen.
4.2.1
Segmentierung
Da das Segmentieren kompletter anatomischer Strukturen im Körper sehr zeitaufwendig ist und oft nur von einem Arzt selbst durchgeführt werden kann,
wurde im Rahmen dieser Arbeit darauf verzichtet Registrierungsverfahren zu
implementieren, die eine vorherige Segmentierung der Leber erforderlich machen. Während der Segmentierung wird entschieden, welche Voxel zum Körpergewebe gehören und welche nicht. Für sämtliche Hintergrundvoxel bzw. Voxel,
die Teile der Bestrahlungs– oder Aufnahmeapparatur darstellen, werden die
Grauwerte während der Segmentierung auf 0 gesetzt. Dies geschieht manuell.
4.2.2
Resampling
Die beiden Aufnahmemodalitäten zeichnen Bilder unterschiedlicher Auflösung
auf. Um beide Bilder überlagern zu können müssen die Voxel die gleiche Größe
haben. Am einfachsten erreicht man das, indem man das eine Volumen mit
der Auflösung des anderen neu abtastet (Resampling). So erreicht man, daß
die Voxelkantenlängen genau denen des anderen Volumens entsprechen. Die
Grauwerte werden dabei interpoliert.
Das in der Regel besser aufgelöste CT wird dabei mit der schlechteren Auflösung
des MRT neu abgetastet. Es wäre auch vorstellbar das MRT an das CT anzupassen, also genau umgekehrt vorzugehen. Dabei gewinnt man im MRT jedoch
keine zusätzliche Information, die beim Vergleich der beiden Volumina zu einem genaueren Registrierungsergebnis führen könnte. Der Rechenaufwand der
Registrierungsalgorithmen erhöht sich allerdings dadurch. Die Interpolation des
CT beim Resampling hat zur Folge, dass z. B. Kanten verwischen. Dies kann
das Verhalten der Gütefunktion beeinflussen. Aus diesem Grund darf man die
Bilder nicht beliebig grob neu abtasten. Zu den in dieser Arbeit vorgenommenen Neuabtastungen wurden Versuche durchgeführt, die gezeigt haben, dass die
Verschlechterung des Registrierungsergebnisses vernachlässigbar klein ist (siehe
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
55
Kapitel 5).
Nachdem die Bilder vorverarbeitet wurden, wird mit dem ersten Schritt der
Registrierung, dem Finden der rigiden Transformation, fortgefahren.
4.3
Rigide Registrierung
Die vorverarbeiten Volumina sollen im ersten Arbeitsschritt mittels rigider
Transformationen überlagert werden.
4.3.1
Freiheitsgrade der Transformation
Während der Vorverarbeitung wurde bereits der Skalierungsvektor s für das
Resampling automatisch berechnet. Gleiche Voxelkantenlängen ensprechen damit auch gleichen realen Längen. Weitere Skalierungen werden nicht betrachtet.
Darüber hinaus sollen auch keine Scherungen modelliert werden. Somit bleiben
nur die 6 Freiheitsgrade rigider Transformationen.
Wie in der Beschreibung der Daten bereits erwähnt wurde, ist der Gantrywinkel während der Bildgebung gleich 0◦ . Die Volumina müssen deshalb nicht um
die x– oder die y–Achse gedreht werden. Sämtliche durch Patientenbewegungen
hervorgerufene Lageänderungen in diesen Richtungen sollen mittels Translationen erfasst werden. In diese beiden Richtungen werden mögliche Rotationen im
Folgenden vernachlässigt.
Die einzige Rotationskomponente, welche nicht vernachlässigt werden kann, ist
die Rotation um die z–Achse. Betrachtet man die unterschiedliche Lage der
den Körper einhüllenden Rechtecke in Abbildung 4.2, wird dies relativ schnell
deutlich. Das MRT ist um einen Winkel von ca. 3 – 5
◦
gegenüber dem CT
verdreht.
Es ergibt sich ein Rotationsvektor, der in seinen x– und y–Komponenten konstant 0 ist:
0
r=
0
ϕ
Zusammen mit den 3 möglichen Translationsparametern
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
56
Abbildung 4.2: Überlagerte transversale Schichtbilder (CT: rot, MRT: grün)
mit eingezeichneten Bounding Boxen.
tx
t=
ty
tz
bleibt für die rigide Registrierung eine Transformation mit 4 freien Parametern.
Die Abbildung Trigid sieht folgendermaßen aus:
Trigid : R4 7→ R4
cos ϕ − sin ϕ 0 tx
sin ϕ
Trigid (x) =
0
0
cos ϕ
0
0
x
0 ty
y
1 tz
z
0 1
1
(4.1)
Dabei werden ein 3-dimensionaler Translationsvektor t und die Rotation um
die z–Achse mit Winkel ϕ gesucht. Die Berechnung wird mit homogenen Koordinaten durchgeführt.
Diese Suche nach dem bestmöglichen Parametervektor
tx
ty
∈ P ⊂ R4
par =
t
z
ϕ
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
57
stellt die rigide Registrierung dar.
P:
4.3.2
endlicher Parametersuchraum.
Durchführung der rigiden Registrierung
Die Transformation Trigid der Registrierung wurde im letzten Abschnitt bestimmt (vgl. 4.1). Das CT–Volumen stellt das Referenzbild dar. Das MRT–
Volumen ist das Modellbild.
Während der rigiden Registrierungsphase werden die frei wählbaren Parameter
par der Transformation Trigid hinsichtlich der Gütefunktion G optimiert.
Suche des besten Parametervektors par nach Brute–Force–Methode
Bei der Optimierung der Transformationsparameter wird die geometrische
Transformation mit verschiedene Parametervektoren auf das Modellbild MRT
angewendet. Danach wird das Gütekriterium G(CT, Trigid (MRT)) berechnet.
Wird G optimal, sind die besten Transformationsparameter par gefunden; man
ist fertig. Ein Brute–Force–Ansatz könnte folgendermaßen aussehen:
FOR ALL ( (tx , ty , tz , ϕ)T ) DO
Berechne Trigid (MRT);
Bestimme Güte G(CT, Trigid (MRT));
IF ( G > Gmax ) DO
Gmax = G;
Bester Parmetervektor = (tx , ty , tz , ϕ)T i ;
END IF
END FOR
tx , ty , tz ∈ R und ϕ ∈ [0, 2π] ist der zu optimierende Parametervektor. Der
Algorithmus sucht eine endliche Menge Punkte eines definierten Suchraumes
komplett ab. Dabei müssen die Intervalle für tx , ty , tz und ϕ in sinnvoller Weise
eingeschränkt werden.
Der große Vorteil einer Brute–Force–Suche liegt darin, dass das Verfahren im
abgedeckten Suchraum immer das Optimum findet.
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
58
Der Nachteil eines solchen Brute–Force–Ansatzes ist, dass die Laufzeiten je
nach Größe des Suchraumes sehr lang sein können. Die Komplexität des Brute–
Force–Algorithmus im n–dimensionalen Suchraum beträgt
O(n) = k n .
Im hier behandelten Fall ist der Parametersuchraum P 4–dimensional. Ist kein
näheres Wissen über die durchzuführende Transformation bekannt, wird P
schnell groß. Hinzu kommt noch, dass das verwendete Gütemaß sowie die geometrische Transformation der Volumina selbst allesamt rechenintensiv sind. In
einigen anfänglichen Tests entstanden lange Laufzeiten. Aus diesem Grund wurde zur Maximierung der Gütefunktion G ein Optimierungsverfahren implementiert.
Optimierung durch Powells Direction Set–Methode und eindimensionalem Fit nach Brent
Zur Maximierung der Gütefunktion wird Powells Direction Set–Methode in
Verbindung mit Brents eindimensionalen Fit verwendet. Dieses Verfahren wird
deshalb verwendet.
Es wird jetzt das Basisverfahren nach [28] für die Minimumsuche einer Funktion
f im N –dimensionalen Parameterraum skizziert:
Initialisiere die Menge ui mit ihren Basisvektoren ei :
ui = ei ,
i = 1, . . . , N
WHILE ( !G(CT, Trigid (MRT)) ≤ ² ) DO
Speichere Startpunkt P0 ;
FOR (i = 1 TO N ) DO
Bewege Pi−1 ins Minimum entlang Richtung ui und nenne ihn Pi ;
END FOR
FOR (i = 1 TO N − 1) DO
ui = ui+1 ;
END FOR
uN = PN − P0 ;
Bewege PN ins Minimum entlang Richtung uN und nenne ihn P0 ;
END WHILE
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
59
Idee des Powell–Verfahrens Dem Powell–Verfahren liegt die folgende Idee
zugrunde. Die Optimierung einer eindimensionalen Funktion mittels parabolischem Fit (vgl. [28]) ist bekannt. Ist der Parameterraum der zu optimierenden
Funktion N –dimensional kann folgendermaßen vorgegangen werden:
Es wird ein Startpunkt P0 im Parametersuchraum P bestimmt. Entlang einer
vorher gewählten Richtung u0 wird ausgehend von P0 für die zu optimierende
Funktion G(CT, MRTT ) das Optimum gesucht. Ausgehend von einem Punkt
P wird dieser Punkt entlang einer Richtung ui ins Minimum einer Funktion
f (P) bewegt. Um dies zu erreichen, wird ein λ bestimmt, so dass
G(CT, MRTT )
minimal wird. Die das Modell–MRT transformierende Transformation T wird
dabei mit den Weten, die sich aus dem Punkt P und der Richtung ui ergeben,
parametrisiert:
par = P + λ ∗ ui .
Das Powell–Verfahren startet mit den reellen Einheitsvektoren e1 . . . en . Für
jede einzelne diese Richtung wird G nacheinander optimiert. Danach wird der
letzte Richtungsvektor neu berechnet:
uN = PN − P0 .
Diese Prozedur wird so lang wiederholt, bis die Abbruchbedingung
G(CT, MRTT ) ≤ ²
erfüllt ist. Das Verfahren bricht ab und gibt den ermittelten besten Parametervektor parbest aus.
Die Implementierung erfolgte in Anlehnung an die in [28] vorgestellte Version.
Man beachte, dass es sich bei der vorgeschlagenen Implementierung um eine
Minimumsuche handelt. Ziel der Registrierung ist jedoch die Maximierung einer Gütefunktion. Um den Implementierungsvorschlag aus [28] übernehmen zu
können, wurden während des Optimierungsprozesses sämtliche Gütemaße in ihrer negierten Fassung verwendet, was auf den Ablauf der Registrierung keinen
weiteren Einfluß hat. Da dies nichts anderes als die Maximierung der Güte zur
Folge hat, wird auch im weiteren Verlauf – wie gewohnt – von der Maximierung
des Gütemaßes die Rede sein.
Der Vorteil des Verfahrens ist seine Konvergenz in quadratischer Zeit O(n) =
n2 .
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
60
Der Nachteil besteht wie bei jedem Optimierungsverfahren darin, dass der Algorithmus gegen ein lokales Extremum konvergiert.
4.4
Nicht–rigide Registrierung
Nachdem die Volumina rigide überlagert wurden, sollen als nächstes die elastischen Deformationen modelliert werden.
4.4.1
Thin-Plate Spline–Interpolation
Einer der am häufigsten verwendeten Ansätze zur lokal elastischen Registrierung ist die Verwendung von Thin-Plate Splines ([8],[22],[32]).
Man betrachte die biharmonische Gleichung
µ
42 U =
∂2
∂2
+
∂x2 ∂y 2
¶
U = 0,
(4.2)
eine partielle Differentialgleichung, welche die Verformung einer dünnen zweidimensionalen Stahlplatte (engl. thin plate) als Funktion U = z(x, y) beschreibt.
Man stelle sich vor, dass im Punkt (0, 0) ein Kraft F~ auf die Platte einwirkt.
Die folgende Gleichung — die Fundamentallösung von 4.2:
z(x, y) = −U (r) = −r2 log r2
(4.3)
stellt dann die Verformung der Platte im Punkt (x, y) dar. r ist der euklidische
p
Abstand x2 + y 2 vom kartesischen Koordinatenursprung (0, 0).
Der Wert z(x, y) kann als die Stärke der Verformung der Platte an der Stelle
(x, y) interpretiert werden. Versteht man unter dieser Verformung eine Koordinatentransformation, können die Thin-Plate Spline–Funktionen, wie in Kapitel
2.3.6 beschrieben, als Interpolationsfunktionen verwendet werden.
4.4.2
Manuelle Kontrollpunktwahl
Um die Interpolation durchführen zu können, benötigt man eine Menge von
Kontrollpunktpaaren. Im einfachsten Fall müssen diese manuell vom Anwender
definiert werden. Dazu werden anatomisch gleiche Punkte in den zwei Volumina
ausgewählt. Diese Punkte werden mittels Thin-Plate Spline–Interpolation so
transformiert, dass der Modellpunkt danach über dem Referenzpunkt liegt.
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
61
Zur manuellen Kontrollpunktwahl wurde ein Tool entwickelt, welches es erleichtern soll, zu Versuchszwecken manuell Marker in den zu registrierenden
Volumina zu definieren und diese im mls–Format zu speichern (siehe Anhang
A.3).
Der Benutzer muss für die Definition der Kontrollpunkte geschult sein. Er
muss die Daten anatomisch korrekt interpretieren können. Es kommt außerdem
erschwerend hinzu, dass die Thin-Plate Spline–Interpolation in Abhängigkeit
von der Verteilung der Kontrollpunkte die Daten unterschiedlich transformiert.
Trotz guter Kenntnisse der Daten kann sich die manuelle Definition der Kontrollpunkte sehr schwierig gestalten.
Einfacher ist es, wenn die Kontrollpunkte automatisch berechnet werden. Der
dazu implementierte Ansatz wird im folgenden Abschnitt detailliert erläutert.
4.4.3
Hierarchischer Ansatz
Zur Implementierung des hierarchischen Ansatzes nach Likar [22] konnten zur
rigiden Registrierung der Teilbilder die in 4.3.2 beschriebenen Verfahren verwendet werden. Einziger Unterschied zur dortigen Vorgehensweise ist die Größe
des Parametersuchraumes. Sie variiert zwischen 2 und 4 Freiheitsgraden.
2D–Registrierung
Die Idee ist es, nach initialer rigider Registrierung eine elastische Registrierung durchzuführen. Der erste elastischen Registrierungsansatz geht davon
aus, daß die Volumina in ihrer z–Richtung — entlang der Longitudinalachse — durch die affine Transformation aus Schritt 1 korrekt überlagert wurden. Somit kann man die Schichtbilder sequentiell transformieren. Das 3D–
Registrierungsproblem wird hierbei in ein 2D–Registrierungsproblem überführt.
Der Ansatz von Likar kann, wie in Kapitel 2.3.6 skizziert, verwendet werden.
Inwiefern diese Annahme überhaupt gemacht werden darf, soll später durch
Analyse der Experimentalergebnisse überprüft werden.
Die Teilbilder werden durch Maximierung von Normalized Mutual Information
Y registriert. Die während der Teilbildregistrierung gesuchte affine Transformation Taf f in berechnet lediglich Translationen in x– und y–Richtung.
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
62
3D–Registrierung
Der hierarchische 3D–Ansatz zur Kontrollpunktberechnung hat die automatische Registrierung der kompletten dreidimensionalen Bilder zum Ziel. Es wird
der für den 3D–Fall modifizierte Algorithmus (Kapitel 2.3.6) verwendet.
Die Teilbilder werden ebenfalls durch Maximierung von Normalized Mutual Information Y registriert. Die gesuchte geometrische Transformation T berechnet
Translationen in x–, y– und z–Richtung.
4.5
Implementierungsbetrachtungen
Das Transformationskoordinatensystem
Alle zu registrierenden Volumina wurden in ein einheitliches Koordinatensystem
transformiert. Das Koordinatensystem wird wie in Abbildung 4.3 zu sehen ist,
definiert. Die z–Achse entspricht der Longitudinalachse des Körpers, die x–
Achse ist die Horizontalachse und die y–Achse entspricht der Sagittalachse.
Abbildung 4.3: Koordinatensystem für Transformationen mit CT–Volumen
Im weiteren Verlauf sollen zur Bezeichnung der Achsen die Begriffe x–, y– und
z–Achse verwendet werden. Selbiges gilt für die Bezeichnung der entsprechenden
rigiden Transformationen. So wird eine Translation entlang der Longitudinalachse als z–Translation bezeichnet, eine Rotation um die Longitudinalachse als
z–Rotation usw.
Die Anzahl der Schichten in einem Volumen wird mit Z, die Anzahl der Spalten
mit X und die Zeilenanzahl mit Y bezeichnet.
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
63
Rotation um das Volumenzentrum Betrachtet man eine Rotation um
den Rotationswinkel α, so entspricht diese einer Rotation um den Ursprung
des Koordinatensystems. Liegt aber der Mittelpunkt des zu rotierenden Volumens nicht im Koordinatenursprung, bedeutet die Rotation eine gleichzeitige
Translation.
Dies kann vermieden werden, indem man vor einer durchzuführenden Rotation
das Volumen mit seinem Mittelpunkt in den Ursprung des Koordinatensystems
verschiebt. Zur Vermeidung diesbezüglich auftretender Probleme definiert sich
der Ursprung des Transfomationskoordinatensystems P0 für alle Volumina V
wie folgt:
X/2
P0 =
Y
/2
0
(4.4)
Umrechnung von Koordinaten Will man beispielsweise Transformationsparameter, die man mit VIRTUOS (Planungssoftware des DKFZ) bestimmt
hat, mit Parametervektoren aus dem eben definierten Koordinatensystem vergleichen, so müssen die Koordinaten erst umgerechnet werden. Der Ursprung
des VIRTUOS –Koordinatensystems PV0 IRT U OS befindet sich jeweils in der linken oberen Ecke eines Volumendatensatzes PV0 IRT U OS = (0, 0, 0)T .
An entsprechender Stelle (siehe Kap. 5.2.1) wird auf die notwendige Umrechung
hingewiesen.
4.5.1
Vorwärtsabbildung vs. Rückwärtsabbildung
Eine Abbildung transformiert die Punkte x eines Eingangsbildes A. Daraus ergibt sich dann das Zielbild, das Ergebnis der angewandten Transformation. In
der Praxis ist es oftmals besser, dieses Zielbild mittels einer Rückwärtsabbildung zu berechnen, weil damit sichergestellt ist, dass jedem Voxel des Zielbildes
ein Grauwert zugeordnet wird. Zuerst wird die zu T inverse Transformation
T −1 bestimmt. Mit dieser Transformation berechnet man dann für alle Voxel
des Zielbildes den Ursprungsort im Eingangsbild. Den dort gefundenen Grauwert trägt man ins Zielbild ein. In Abbildung 4.4 sind die beiden möglichen
Vorgehensweisen schematisch dargestellt.
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
Vorwärtsabbildung
64
Rückwärtsabbildung
Abbildung 4.4: Vorwärts– und Rückwärtsabbildung
Rigide Abbildungen
Alle rigiden Abbildungen dieser Arbeit wurden mittels Rücktransformation realisiert. Da jedem Voxel des Zielbildes ein Grauwert zugeordnet werden kann, verhindert man das Auftreten von Lücken“ . Unter Lücken versteht man Voxel
”
des Zielbildes, auf die während einer Transformation kein Grauwert abgebildet
wird.
Entstehung von Lücken bei der Vorwärtstransformation Man stelle
sich ein zweidimensionales Bild A der Dimension 10 × 10 Pixel vor. Alle Pixel
haben den Wert 1. Das Bild wird in x– und y–Richtung mit Faktor 2 skaliert.
Das bedeutet, dass der Grauwert jedes Pixels (x, y) aus A an die Stelle (2 ×
x, 2 × y) transformiert wird. Habe das Zielbild die Dimension 20 × 20 Pixel. Die
Skalierung mit Faktor 2 transformiert die Grauwerte des Originals auf jeden
zweiten Punkt des Zielbildes:
T (1, 1) = (2, 2)
T (2, 1) = (4, 2)
T (3, 1) = (6, 2)
..
.
.
In die dazwischenliegenden Pixel werden keine Grauwerte eingetragen. Die
Transformation ist lückenhaft. Aus diesem Grund wird die Rücktransformation
bevorzugt. Dabei berechnet man für jedes Pixel des Zielbildes die Umkehrfunktion. So berechnet man die Koordinaten des Originalbildes, aus welchen man
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
65
dann den Grauwert auslesen und ins Zielbild eintragen kann. Im eben erklärten
Beispiel ist die Rückwärtstransformation eine Skalierung mit Faktor 1/2. Für
alle Pixel (x, y) 0 ≤ x, y ≤ 20 lässt sich so ein Punkt aus A ermitteln. Entspricht
die auf diesem Weg berechnete Koordinate nicht einer diskreten Koordinate aus
A, muss der in das Zielbild einzutragende Grauwert aus den Grauwerten der
diskreten Nachbarpunkte interpoliert werden.
Verwendung der Vorwärtstransformation Manchaml ist die Verwendung der Rücktransformation nicht möglich ist. Beispielsweise ist nicht zu allen
Transformationen eine berechenbare Inverse bekannt. In solch einem Fall muss
man auf die Vorwärtstransformation zurückgreifen.
Berechnung der Abbildungen zur nicht–rigiden Registrierung
Hier wird das Modell mittels der Vorwärtsabbildung transformiert, da die Rücktransformation nicht berechnet werden kann. Dies kann zu den eben besprochenen Abbildungsfehlern führen. So ist es zum Beispiel vorstellbar, dass je nach
Abbildung im transformierten Modellvolumen Lücken vorhanden sind. Um dies
zu vermeiden, kann man bei der Berechnung des Bildes das Original überabtasten (Oversampling). Oversampling erhöht jedoch die Rechenzeit wesentlich.
4.5.2
Trilineare Interpolation
Bei der trilinearen Interpolation wird der Grauwert eines zwischen den diskreten
Koordinaten des Originals liegenden Punktes aus den acht Nachbarn dieses
Punktes berechnet (siehe Abb. 4.5).
Beispiel
Mittels Rücktransformation wurde der Punkt P = (x, y, z) berechnet. Sei bxc
die größte ganze Zahl, welche kleiner als x ist; P ((bxc, byc, bzc) entspricht damit
diskreten Voxelkoodinaten im Originalbild.
Zur Bestimmung des interpolierten Grauwertes betrachte man folgende acht
Punkte des Originals:
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
P1 = (bxc, byc, bzc)
P5 = (bxc, byc, bzc + 1)
P2 = (bxc + 1, byc, bzc)
P6 = (bxc + 1, byc, bzc + 1)
P3 = (bxc, byc + 1, bzc)
P7 = (bxc, byc + 1, bzc + 1)
66
P4 = (bxc + 1, byc + 1, bzc) P8 = (bxc + 1, byc + 1, bzc + 1).
gi steht für den Grauwert des i–ten Punktes. Der interpolierte neue Grauwert
gneu an der Stelle (x, y, z) berechnet sich dann folgendermaßen:
gneu =
¡
¢
(1 − f racx ) · (1 − f racy ) · (1 − f racz ) · g0
¡
¢
+ (f racx ) · (1 − f racy ) · (1 − f racz ) · g1 · · ·
¡
¢
· · · (1 − f racx ) · f racy · f racz · g7
¢
¡
+ f racx · f racy · f racz ∗ g8
Hierbei sind f racx = (x − bxc), f racy = (y − byc) und f racz = (z − bzc).
P8
P7
P3
Mittelpunkt der
Nachbarvoxel
P4
Berechnete
Ursprungskoordinate
P5
P1
P6
P2
Abbildung 4.5: Berechneter Punkt und die 8 zur Interpolation verwendeten
Nachbarn
4.5.3
Verwendetes Gütemaß
Als Gütemaß kam während sämtlicher Experimente Normalized Mutual Information Y zum Einsatz.
Histogramm–Modifikation
Während der Modifikation von Bildern verändert sich die Anzahl der enthaltenen Grauwerte. So werden mittels Interpolation beispielsweise neue Grauwerte
erzeugt. Des Weiteren enthalten Tomogramme in der Regel Rauschen. Dieses
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
67
Rauschen verändert die Darstellung von homogenem Gewebe, indem die Grauwerte um den tatsächlichen Grauwert gestreut werden. Das Gütemaß Normalized Mutual Information Y berechnet sich auf Basis der Grauwertverteilungen
der Bilder. Eine Vergrößerung der Grauwertanzahl erschwert es, Gebiete mit
gleichen Grauwerten zu finden und zu vergleichen. Dies Schwierigkeit kann vermieden werden, indem für das Histogramm eines Bildes eine Einteilung der
Grauwerte in Klassen bestimmt wird (engl. Binning). Typische Einteilungen
sind 32, 64 oder 128 Grauwertklassen. Der Wert hängt stark vom jeweiligen
Problem und den zu bewertenden Daten ab. Bei der Klassenerzeugung wird für
jeden Grauwert die Zugehörigkeit zu einer der äquidistanten Klassen berechnet.
Der Grauwert x wird der Klasse k wie folgt zugeordnet:
¶
µ
max
k = round x ·
.
#k
(4.5)
Dabei stellt max den maximalen Grauwert im Ausgangshistogramm dar. #k
steht für die Anzahl der Grauwertklassen.
4.5.4
Random Resampling
Bei diesem Verfahren wird jeder diskrete Punkt P eines Bildes A minimal transformiert:
Ã
P =
i + ²i
j + ²j
!
.
²i und ²j sind normalverteilt aus dem Intervall [−1, +1].
Durch Random Resampling werden die Grauwerte der jeweiligen Nachbarpunkte interpoliert. So entsteht eine Mittelung der Grauwerte, was Interpolationsartefakte in den Bildern verringert. Dies stabilisiert den Verlauf von Normalized
Mutual Information Y (vgl. [26], [30]).
4.6
Zusammenfassung
In diesem Kapitel wurden alle im praktischen Teil der Arbeit entwickelten Verfahren sowie die realisierten Methoden der Registrierung vorgestellt. Beginnend
mit der rigiden Registrierung wurden Methoden implementiert, die eine effiziente Analyse und Verarbeitung der Volumendatensätze erlauben. Es wurden
KAPITEL 4. REALISIERUNG DER REGISTRIERUNGSSTUDIE
68
Algorithmen entwickelt, mit deren Hilfe die Datensätze automatisch oder manuell registriert werden können. Die automatische Registrierung basiert auf der
Optimierung des Gütemaßes Normalized Mutual Information. Zur Verbesserung des Laufzeitverhaltens der Registrierung wurde ein Optimierungsverfahren implementiert (Powell–Verfahren). Die sich aus den einzelnen Algorithmen
ergebenden Lösungen — die Transformationsparameter — können einfach miteinander verglichen werden. Zur Visualisierung der erzielten Überlagerungen
können die Transformationen auf die Ausgangsvolumina angewendet werden.
Danach können die transformierten Volumina gespeichert werden und mittels
VIRTUOS überlagert werden.
Im zweiten Teil wurde die nicht–rigide Thin-Plate Spline–Interpolation implementiert. Sie kann zur Transformation von 2D– und 3D–Daten eingesetzt
werden. Die Thin-Plate Spline–Interpolation basiert auf der Überlagerung von
Landmarken. Für die Bestimmung der Landmarken wurde ein einfaches Programm implementiert, mit dessen Hilfe Landmarken manuell definiert und gespeichert werden können. Ein ebenfalls realisiertes Verfahren soll die Landmarken automatisch finden.
Nachdem sämtliche durchgeführten Arbeitsschritte erläutert wurden, sollen im
nächsten Kapitel die mittels der einzelnen Ansätze erzielten Ergebnisse präsentiert und analysiert werden.
Kapitel 5
Präsentation und Analyse der
Registrierungsergebnisse
In Kapitel 3 wurden die Patientendatensätze sowie Phantome näher erläutert.
Mit diesen Daten wurden die im letzten Kapitel entwickelten Registrierungsalgorithmen getestet. In diesem Kapitel sollen nun die dabei erzielten Ergebnisse
präsentiert und analysiert werden. Ziel der Registrierung war stets, das Lebergewebe — speziell die Lebertumoren — möglichst exakt zu überlagern.
5.1
Vorbereitung der Registrierung
Bevor die einzelnen Registrierungsergebnisse beschrieben werden, sollen vorher
einige Erläuterungen zu den Rahmenbedingungen gemacht werden, unter denen
die Versuche gemacht wurden.
Koordinatenangaben Das bereits definierte Koordinatensystem wird allen
geometrischen Transformationen zugrundegelegt. Da auch Transformationen,
Längen– und Größenangaben aus VIRTUOS einfließen, müssen zur Vermeidung von Verwechselungen die beiden Koordinatensysteme voneinander unterschieden werden. Das VIRTUOS–eigene Koordinatensystem wird durchweg als
internes Koordinatensystem bezeichnet. Das in Kapitel 2.3.1 definierte Koordinatensystem soll im weiteren Verlauf als externes Koordinatensystem bezeichnet werden. In beiden Fällen werden die Größenangaben als Voxelkoordinaten
bezeichnet. Des Weiteren werden an einigen Stellen Angaben in Millimeter gemacht.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
5.1.1
70
Bewertung der Registrierungsergebnisse
Das Finden einer quantitativen Fehlerabschätzung ist ein großes Problem
bei der Bewertung erzielter Registrierungsergebnisse. Wie bewertet man die
Qualität der erreichten Überlagerung? Oftmals bleibt nichts anderes als eine
Abschätzung durch einen Experten. So kann zum Beispiel ein Arzt die Ergebnisse begutachten. Er kann beurteilen, ob sie medizinisch sinnvoll sind.
Man beachte, dass die zu bewertende Qualität der ermittelten Registrierung
nichts mit der bereits vorgestellten Gütefunktion G zu tun hat. Die Gütefunktion G dient während der Registrierung dem automatischen Finden der
bestmöglichen Überlagerungstransformation T . Das Qualitätsmaß dient der Bewertung des Registrierungsergebnisses. Es soll dazu herangezogen werden, verschiedene Registrierungsansätze miteinander zu vergleichen.
Vergleich von Schichtbildern
Als erstes Kriterium soll die sichtbare Überlagerung einzelner Schichten als Maß
für die Güte der erzielten Überlagerung dienen. Dazu sollen mittels des in der
Planungssoftware enthaltenen Überlagerungstools verschiedene Schichten ausgewählt werden. Dabei kommt es natürlich sehr auf die Betrachtungsweise an.
In den erzeugten Überlagerungen gab es oft gut übereinanderliegende Strukturen, obwohl das Gesamtergebnis der Registrierung eher schlecht war. Diese
(Teil–)Überlagerungen können auch zufällig entstanden sein. Sie müssen kein
Beweis für eine gefundene Registrierung sein.
Vergleich der Transformationsparameter
Um die Ergebnisse besser bewerten zu können, werden die während der Registrierung berechneten Transformationsparameter mit manuell bestimmten
Transformationsparametern verglichen. Die manuellen Transformationen wurden mit VIRTUOS berechnet.
Vergleich von Landmarken
Es wurden für die beiden Datensätze jeweils manuell Kontrollpunkte definiert.
Diese Landmarkendefinition ist mit Sicherheit fehleranfällig. Es stand allerdings
kein besseres Gütekriterium zur Verfügung, so dass diese Methode verwendet
wurde.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
71
Die Definition und Verteilung der Landmarken soll als nächstes betrachtet werden.
5.1.2
Definition der Landmarken
Die Landmarken wurden in den Rohdatensätzen definiert. Die sich aus den einzelnen Verarbeitungsschritten ergebenden Transformationen werden simultan
auf die Landmarken angewandt. Somit kann die Transformation der Landmarkenpaare und die damit erreichte Überlagerung derselben während der Arbeitsphasen kontinuierlich verfolgt werden.
Im weiteren Verlauf sollen der Landmarkensatz für pat gk mit markers gk und
für pat bb mit markers bb bezeichnet werden.
Auswahl geeigneter Landmarken In beiden Volumina wurden markante Punkte gesucht. Bei der rigiden Registrierung werden die kompletten Datensätze überlagert. Im Hinblick darauf sollten sich die Kontrollpunkte relativ
gleichmäßig über die Bilder verteilen. So wurden Landmarken in den Nieren
oder auf der äußeren Hülle des Körpers definiert. Ein zweite Gruppe von Landmarken beinhaltet Punkte, die sich im Lebergewebe befinden. Solche Landmarken zu finden ist schwierig, da das Lebergewebe in den Aufnahmen homogen dargestellt wird. Diese Kontrollpunkte sollen vor allem zur Bewertung
der elastischen Registrierung herangezogen werden. Um während der rigiden
Registrierungsversuche eine größere Anzahl Landmarken zur Verfügung zu haben, wurde diese zweite Gruppe Marker auch während der Analyse der rigiden
Registrierung verwendet.
5.1.3
Ergebnisse der Vorverarbeitung
Die Bilder wurden, wie im vorigen Kapitel beschrieben, vorverarbeitet. Dabei
wurden sie neu abgetastet; der Hintergrund wurde segmentiert. Inwiefern die
Hintergrundsegmentierung notwendig ist, soll mittels eines Registrierungsversuches untersucht werden.
Ablauf der Vorverarbeitung am Beispiel von pat gk
Anhand des Datensatzes pat gk wird erläutert, wie die Vorverarbeitungsschritte die Volumendaten in Aussehen und Größe verändern. Abbildung 5.1 zeigt
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
72
Schichtbilder beider Volumina jeweils vor und nach der Vorverarbeitung.
CT
MRT
Abbildung 5.1: Transversale Schichtbilder aus Datensatz pat gk vor und nach
der Vorverarbeitungsstufe (Voxelkantenlängen wurden angeglichen)
Es ist gut zu erkennen, dass die Voxelkantenlängen in x– und y–Richtung angepasst wurden. Im links sichtbaren CT–Schnitt wurden die sichtbaren Strukturen
des stereotaktischen Rahmens der Bestrahlungsapparatur entfernt. Alle Voxel,
die nicht zum Körpergewebe gehören, haben jetzt den Grauwert 0 und werden
schwarz dargestellt. Hierbei bildet die Bauchplatte zur Abdominalkompression
eine Ausnahme. Sie wurde während der Segmentierung nicht entfernt, da sie zu
stark in den Körper hineingepreßt ist.
Der zweite Rohdatensatz pat bb wurde auf die gleiche Weise vorverarbeitet. Es
wird darauf verzichtet das Ergebnis graphisch darzustellen.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
73
Analyse der Vorverarbeitungsstufe
Landmarkenvergleich Nach der Vorverarbeitung liegen die beiden Volumendatensätze im gleichen Koordinatensystem. Man kann nun die definierten
Landmarken zum ersten Mal sinnvoll miteinander vergleichen.
Tabelle 5.1: Landmarken markers gk nach der Vorverarbeitung (Koordinatenangaben für Transformationskoordinatensystem)
Am Beispiel der modifizierten Landmarken des Datensatzes markers gk zeigt
Tabelle 5.1 die transformierten Marker. Die CT–Koordinaten werden bei der
Bewertung der automatischen Registrierungsverfahren als Referenz dienen.
Für beide Datensätzee gilt, dass die Überlagerung von CT– und MRT–Volumen
schlecht ist. Dies verdeutlicht auch der berechnete durchschnittliche quadratische Fehler der Landmarkenüberlagerung in Tabelle 5.2.
Außerdem zeigt Tabelle 5.2 die für die einzelnen Vektorkomponenten aufsummierten Fehler (x–Error, y–Error und z–Error) sowie die jeweiligen Durchschnittswerte. Das Minimum ist der Abstand der am besten überlagerten Landmarke, das Maximum der Abstand des am schlechtesten überlagerten Markers.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
74
Tabelle 5.2: Überlagerungsfehler der Landmarken von pat gk und pat bb nach
der Vorverarbeitung (Angaben in Millimeter ).
Auflösung
Die jeweils 256 × 256 Voxel großen transversalen Schichten haben nach der
Vorverarbeitung die gleiche x– und y–Auflösung. Des Weiteren wird auch die
z–Auflösung angeglichen. Man beachte, dass zwar beide Volumina die gleiche
z–Auflösung haben, diese sich aber von der x– und y–Auflösung unterscheidet.
Es ist üblich Volumendaten vor der Registrierung so zu normieren, dass sie
aus würfelförmigen Voxeln bestehen, die Kantenlängen in allen drei Richtungen
also gleich sind. Um dies zu erreichen kann man die z–Auflösung vergrößern
und an die xy–Auflösung anpassen. Dies wäre allerdings mit einem erheblichen
Mehraufwand an Rechenzeit verbunden, weshalb von der Realisierung abgesehen wurde. Im Gegenzug kann man die xy–Auflösung verkleinern. Der damit
verbundene Informationverlust wäre allerdings zu groß. Somit wird auch dieser
Weg nicht gewählt. Die unterschiedlichen Kantenlängen werden daher in Kauf
genommen.
5.2
Registrierungsversuche mit affinen Transformationen
Es wurde eine Reihe von Versuchen zur affinen Registrierung durchgeführt.
Diese sollen nun detailliert beschrieben und ausgewertet werden.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
5.2.1
75
Manuelle Registrierung
Im ersten Registrierungsversuch wurden die Volumina mittels der Planungssoftware VIRTUOS interaktiv überlagert.
Da die Volumina in VIRTOUS eine andere Auflösung als während der automatischen Registrierung haben und der Ursprung der beiden Transformationskoordinatensysteme nicht übereinstimmt, müssen die manuell bestimmten Translationsparameter zuerst vom internen Koordinatensystem ins externe transformiert werden. Danach kann man sie mit den Translationen der automatischen
Registrierung vergleichen, oder man kann sie zur Transformation der definierten
Marker verwenden.
Bei der interaktiven Suche nach einer guten Überlagerung wurde vor allem
auf zwei Dinge ein besonderes Augenmerk gelegt. Erstens sollte eine gute z–
Translation gefunden werden. Um dies zu erreichen kann man sich an der
Lage der inneren Organe, z.B. Position der Nieren, orientieren. Als zweites
wurde versucht, eine möglichst gute Überlagerung der äußeren Hülle des
Körpers zu erzielen, was Translationen in x– und y–Richtung entspricht.
Transformationsparameter
für
pat gk
Das MRT aus Datensatz
pat gk wurde mit folgendem Parametervektor transformiert:
parmanuell
tx
ty
=
t
z
ϕz
38
= 35
254
−2◦
−1,5
= −3,5
13,7
−2◦
−2,93
= −6,84
82,02
−2◦
Voxelkoordinaten
VIRTUOS
Millimeter
EXTERN
Das Ergebnis entspricht den beiden gewünschten Kriterien — Überlagerung der
äußeren Hülle und gute Übereinstimmung in z–Richtung.
Die Abbildung 5.2 zeigt das Ergebnis der Überlagerung. Die roten Anteile der
Schichtbilder entsprechen dem CT. Die grünen Anteile entsprechen dem überlagerten MR–Tomogramm.
Im Transversalschnitt ist zu erkennen, dass die äußere Hülle der beiden Volumina gut überlagert ist. Gleichzeitig betrachte man auch die Überlagerung der
inneren Organe in x– und y–Richtung. Diese ist immer noch schlecht. Vor allem die durch die starke Abdominalkompression mittels Bauchplatte hervorge-
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
76
Abbildung 5.2: Schichtbilder des manuell überlagerten Datensatzes pat gk .
Oben links: Frontalschnitt, Oben rechts: Sagittalschnitt, Unten: Transversalschnitt. Das CT ist rot dargestellt und wird vom grün dargestellten MRT überlagert.
rufenen Translationen des Körperinneren können mittels der rigiden manuellen
Überlagerung nicht kompensiert werden. Betrachtet man die Leber im Transversalschnitt, wird deutlich wie stark der Fehler der Überlagerung (vor allem
in y–Richtung) noch ist. Im Frontalschnitt (oben links) kann man sich an der
Überlagerung der rechten Niere orientieren, um die erreichte Übereinstimmung
in z–Richtung zu bewerten.
Ergebnisse für pat bb
Die interaktive Registrierung des Datensatzes
pat bb gestaltete sich einfacher als die Registrierung von pat gk . Die durch
die Abdominalkompression hervorgerufene Deformation des Bauchraumes war
im Vergleich zu pat gk relativ gering. Somit wurde bei Optimierung der zwei
oben genannten Kriterien gleichzeitig eine bessere Übereinstimmung der inneren Strukturen erzielt.
Der folgende Parametervektor wurde mittels VIRTUOS für das MRT aus
pat bb ermittelt:
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
parmanuell
tx
ty
=
t
z
ϕz
78
= 120
287
−4◦
−7,0
= 16,0 =
4,9
◦
−4
Voxelkoordinaten
VIRTUOS
−13,67
77
31,26
36,98
◦
−4
Millimeter
EXTERN
Die Visualisierung der Schichtbilder in Abbildung 5.3 soll die Qualität der Überlagerung skizzieren.
Abbildung 5.3: Schichtbilder des manuell überlagerten Datensatzes pat bb .
Oben links: Frontalschnitt, Oben rechts: Sagittalschnitt, Unten: Transversalschnitt. Das CT ist rot dargestellt und wird vom grün dargestellten MRT überlagert.
Gut überlagert sind beispielsweise die in den Schichtbildern sichtbaren Rückenmarksstrukturen. Die Nieren liegen — wie im Transversalschnitt gut erkennbar
ist — sehr gut übereinander.
Um die Überlagerungsergebnisse qualitativ bewerten zu können sollen nun die
Fehler in der Landmarkenüberlagerung analysiert werden.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
78
Bewertung der interaktiven Überlagerung anhand der Landmarken
Transformation und Analyse der Landmarken Die Landmarken
markers gk und markers bb wurden mit den in VIRTUOS gefundenen Parametern transformiert.
Tabelle
5.3:
Überlagerungsfehler
der
Landmarken
markers gk
und
markers bb nach der interaktiven Überlagerung (Angaben in mm).
In Tabelle 5.3 sind die aufsummierten Abstände sowie die durchschnittlichen
Überlagerungsfehler für die einzelnen Landmarken aufgeführt. Zusätzlich zeigt
die Tabelle auch, wie sich dieser Überlagerungsfehler auf die verschiedenen
Raumrichtungen aufteilt. Es fällt auf, dass vor allem die Überlagerung in z–
Richtung stark verbessert wurde. Vergleicht man die Werte aus Tabelle 5.3 mit
denen aus Tabelle 5.2, so wird deutlich, dass sich die erzielte Überlagerung verbessert hat. Vor der Registrierung betrug der durchschnittliche Abstand der
Marker für pat gk 83, 08 mm; für den Datensatz pat bb waren es 53, 05 mm.
Durch die manuelle Überlagerung verkleinerten sich die Werte auf weniger als
ein Viertel ihres Ausgangswertes. Mit ≈ 20 mm ist der Fehler für pat gk jedoch
immer noch sehr groß. Dies ist beim Datensatz pat bb besser. Hier beträgt der
durchschnittliche Fehler nach der Registrierung nur noch ≈ 10 mm, was daran
liegt, dass der Einfluß der Abdominalkompression hier geringer ist und somit
die gesamte Überlagerung besser mittels rigider Transformationen modellierbar
ist.
5.2.2
Brute–Force–Ansatz
Es werden nun die mittels Brute–Force–Suche durchgeführten Experimente vorgestellt.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
79
Analyse der Gütefunktion Y am Phantomdatensatz
Das Gütemaß Normalized Mutual Information Y wurde anhand des künstlichen
Datensatzes PHANTOM 3D untersucht. Das Modellvolumen des Phantoms ist
ein Teilbild der Referenz.
Das Optimum der Gütefunktion wird bei tz = 10 und ϕ = −5◦ erwartet. Dies
sind genau die Werte, die die bei der Phantomerzeugung angewandte Transformation umkehren.
Abbildung 5.4 zeigt den Verlauf von Y unter verschiedenen z–Translationen tz
und Rotationswinkeln ϕ.
Abbildung 5.4: Verlauf von Y
für verschiedene z–Rotationen und z–
Translationen
Das globale Maximum liegt nicht wie erwartet bei ϕ = −5◦ . Die korrekte z–
Translation wurde zwar gefunden, jedoch wurde der Rotationswinkel nicht korrekt berechnet. Dies kann folgendermaßen erklärt werden: Während der Berechnung des Gütemaßes wird das Modell mit den jeweils aktuellen Transformationsparametern transformiert. Dabei werden die Grauwerte des transformierten
Bildes jeweils interpoliert. Diese Interpolation führt aber stets zu einer leichten
Verfälschung der Grauwerte; Kanten verwischen. Ist nun der Rotationswinkel
gleich 0◦ , sind die neuen interpolierten Grauwerte gleich den Grauwerten des
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
80
Originals, da die durchgeführten Translationen stets mit diskreten Werten parametrisiert wurden. Im Vergleich zu diesen Originalwerten verringert sich durch
eine Interpolation das Gütemaß. Das in Abbildung 5.4 dargestellte Maximum
entsteht als Folge des Interpolationsfehlers bei allen anderen Transformationen.
Das Problem kann durch Random–Resampling beseitigt werden (siehe Kap.
4.5.4). Vor jeder Transformation werden die Bilder neu abgetastet. Abbildung
5.5 zeigt das Ergebnis der mit diesem modifizierten Algorithmus berechneten
Güte.
Abbildung 5.5: Verlauf von Y nach Random–Resampling für verschiedene z–
Rotationen und z–Translationen
Binning
Beim Binning wird die Gesamtzahl der im Bild vorhandenen Grauwertklassen
verkleinert (siehe Kap. 4.5.3, S. 66).
Abbildung 5.6 zeigt den Verlauf von Normalized Mutual Information Y (NMI)
für verschiedene Klassenwerte unter variierenden z–Translationen tz .
Das Maximum bewegt sich für alle Klassenwerte zwischen Werten von 14 bis
16. Um das Maximum bildet sich für eine höhere Anzahl an Grauwertklassen
(128 bzw. keine Modifikation) ein relativ starkes Plateau heraus. Je kleiner
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
81
Abbildung 5.6: Verlauf von Y für verschiedene Binning–Klassenanzahl unter
variabler z–Translation
die Klassenanzahl wird, desto stabiler und ausgeprägter entwickelt sich das
Maximum. Für 48, 32 und 24 Grauwertklassen lag das Maximum bei tz = 14.
Da man an einem ausgeprägten Maximum der Gütefunktion interessiert ist,
wurde im weiteren Verlauf der Arbeit mit einer Einteilung des Histogramms in
32 bzw. 24 Grauwertklassen gearbeitet.
Versuche mit verschiedenen z–Auflösungen
Wie bereits erwähnt wurde, haben die Volumina unterschiedliche Auflösungen in z. Es wird nun untersucht, ob man das höher aufgelöste CT in der z–
Auflösung an das MRT anpassen darf, oder ob die Qualität der Registrierung
davon beeinträchtigt wird.
Dazu wird der Verlauf der Gütefunktion unter verschiedenen z–Translationen
betrachtet. Abbildung 5.7 zeigt den Verlauf der Gütefunktion für die CT–
Auflösung (3 mm) und die MRT–Auflösung (6 mm).
Das Maximum unterscheidet sich kaum. Es liegt in beiden Fällen bei einer
Translation von ≈ 84 mm.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
82
Abbildung 5.7: Gütefunktion Y für z–Auflösungen der Volumina unter variabler
z–Translationen (Angaben in Millimeter )
Die Verkleinerung der z–Auflösung im Rahmen der Vorverarbeitung vor der
Durchführung der Registrierung bleibt ohne Auswirkung auf das Registrierungsergebnis.
Experimente mit pat gk und pat bb
Es soll ein möglichst großer Suchraum abgedeckt werden. Da der Aufwand der
Brute–Force–Suche mit O(k n ) sehr groß ist, wird die Größe des Parametersuchraumes eingeschränkt. Dazu können die während der manuellen Registrierung
gewonnenen Kenntnisse genutzt werden. Da während erster Versuche vor allem
die z–Translation immer invariant war und nahe dem in der manuellen Registrierung gefundenen Wert lag, wird tz ein fester Wert zugewiesen. Es wird der
mittels VIRTUOS gefundene Wert verwendet.
Nach Beendigung der Brute–Force–Suche der anderen drei Parameter, wurden
für diese die gefundenen Werte fest eingestellt. Danach wurde tz mittels Brute–
Force–Suche bestimmt. Dabei konnte das Güteoptimum für den anfänglich fest
eingestellten Wert bestätigt weredn.
Der zu optimierende Parametervektor für pat gk sieht folgendermaßen aus:
tx
tx
ty ty
=
parpat gk =
tz 13,67
ϕ
ϕ
tx ,ty ∈ (−5 . . . 5) , ϕ ∈ (−6◦ . . . 4◦ ) .
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
83
Entsprechend wurde der Suchraum für pat bb wie folgt eingeschränkt:
tx
tx
ty ty
parpat bb =
t = 4,93
z
ϕ
ϕ
tx ∈ (−10 . . . 0) ,
ty ∈ (10 . . . 20) ,
ϕ ∈ (−5◦ . . . 5◦ )
Die Transformationsparameter wurden dahingehend optimiert, dass die Gütefunktion Normalized Mutual Information Y maximal ist.
Nach Brute–Force–Suche wurden folgende zwei Parametervektoren gefunden
(Angaben in Voxelkoordinaten):
0,00
2,00
parpat gk =
13,67
−3,0
−7,00
18,00
und parpat bb =
4,93
−2,00
Für beide Datensätze wird die Tendenz in Richtung der mittels manueller Registrierung gefundenen Parameter deutlich. Nur in in y–Richtung ist vor allem
im Datensatz pat gk eine starke Abweichung erkennbar.
Untersuchung der y–Abweichung am Beispiel von pat gk
Betrachtet
man die transversalen Schichtbilder in Abbildung 5.8 des mittels Brute–Force–
Parameter transformierten MRT–Volumens aus pat gk wird deutlich, dass die
äußeren Körperhüllen in y–Richtung nicht mehr übereinanderliegen.
Das kann damit erklärt werden, dass der Einfluß der inneren Körperstrukturen
bei Bewertung mittels Normalized Mutual Information stärker ins Gewicht fällt
als die äußere Körperhülle. Die Gütefunktion Normalized Mutual Information
wird größer, wenn die Körperorgane besser übereinanderliegen. Dies wird auch
dadurch bestätigt, dass das MRT–Bild bei der mit Y gefundenen Transformation so weit in y–Richtung verschoben wird, bis die Vorderkante des MRT hinter
der Bauchplatte aus dem CT liegt (siehe Abbildung 5.9 R1, rechts). Im Vergleich dazu reicht das MRT im linken Bild über das komprimierte CT heraus.
Im rechten Bild von Abbildung 5.9 wird deutlich, dass man durch die größere
y–Transformation eine Fehlüberlagerung der Wirbelsäule und der Rückenpartie
in Kauf nimmt, was sich bei einer global rigiden Transformation nicht ändern
läßt (siehe Abb. 5.9 R2).
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
84
Abbildung 5.8: Transversalschichten 29, 41, 49, 58 aus Datensatz pat gk (rot:
Referenz–CT, grün: transformiertes MRT )
R2
R1
R1
Abbildung 5.9: Sagittalschicht aus Datensatz pat gk . Links: manuell bestimmte Transformation, Rechts: mittels Normalized Mutual Information ermittelte
Transformation (rot: Referenz–CT, grün: transformiertes MRT )
Inwiefern die mit Y gefundene Transformation zu einem guten Registrierungsergebnis führt, soll jetzt durch die Analyse der Landmarken überprüft werden.
Analyse der Landmarken Nach der Transformation der Landmarken mit
den Brute–Force–Parametern ergaben sich für die beiden Landmarkendatensätze die in Tabelle 5.4 aufgelisteten Abstände.
Der durchschnittliche Überlagerungsfehler ist kleiner als bei der manuellen
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
Tabelle
5.4:
Überlagerungsfehler
der
Landmarken
markers gk
85
und
markers bb nach Transformation mit den im Brute–Force–Verfahren gefundenen Parametern (Angaben in mm).
Überlagerung (vgl. Tabelle 5.3). Dies bestätigt die eben gemachte Annahme,
dass das mittels Mutual Information gefundene Parameteroptimum zwar die
Überlagerung der äußeren Körperhülle nur schwach gewichtet, jedoch die relativ gleichmäßig über den Körper verteilten Landmarken gut überlagert.
Die Fehlerdifferenz d der durchschnittlichen Überlagerung
d =k M SEM anuell − M SEBrute−F orce k
fällt bei Datensatz pat gk wesentlich größer (d = 3, 99 mm) aus als bei
pat bb (d = 0, 67 mm). Der Vergleich von M SEY für pat gk nach manueller Registrierung (dY = 15, 52 mm) und Brute–Force–Registrierung (dY = 11, 54 mm)
macht deutlich, dass der Unterschied in der Landmarkenüberlagerung vor allem
durch die unterschiedlichen Werte für die y–Translation zustandekommt. Dies
unterstreicht die zur y–Abweichung gemachten Betrachtungen. Die Tatsache,
dass die Fehlerdifferenz d für pat bb gegen 0 geht, bestätigt die bereits geäußerte Vermutung, dass sich die Abdominalkompression in Datensatz pat bb weniger
stark bemerkbar macht. Aus diesem Grund sind sowohl die äußere Körperhülle
als auch die inneren Organstrukturen gut überlagert.
5.2.3
Powell–Verfahren
Im nächsten Experiment wurde der im vorangegangenen Kapitel vorgestellte
Optimierungsalgorithmus eingesetzt, um das Gütemaß in Abhängigkeit von den
Transformationsparametern (tx , ty , tz , ϕ)T zu maximieren.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
86
Transformation und Analyse der Landmarken
Zur Abschätzung der Qualität der gefundenen Parameter wurden wieder
die Landmarkensätze transformiert. Jeder Datensatz wurde zehnmal mittels
Powell–Verfahren registriert. Um eine Aussage über die durchschnittliche Qualität der mit dem Powell–Verfahren gefundenen Parameter machen zu können,
wurde für die 10 gefundenen Transformationsparameter p1 bis p10 der Mittelwert berechnet:
paravg
tx
tx 1
10
ty
1 X
ty 1
=
=
tz 10 i=1 tz1
ϕ
ϕ
Die so berechneten Transformationsparameter paravg hatten für die beiden
Volumendatensätze folgende Werte (Angaben in Voxelkoordinaten):
0,23
1,73
paravg (pat gk) =
13,98
−2,42
−6,34
17,50
und paravg (pat bb) =
4,62
−1,50
Es wurde der Überlagerungsfehler bestimmt. Tabelle 5.5 zeigt das Ergebnis.
Tabelle
5.5:
Überlagerungsfehler
der
Landmarken
markers gk
und
markers bb nach Transformation mit den mittels Powell–Verfahren gefundenen
Parametern (Angaben in mm).
Die so erzielte Überlagerung ist kaum schlechter als das mit dem Brute–Force–
Verfahren bestimmte Optimum. Die Differenz d des durchschnittlichen Über-
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
87
lagerungsfehlers zum Überlagerungsfehler der mittels Brute–Force–Verfahren
bestimmten Transformation
d =k M SEP owell − M SEBrute−F orce k
beträgt für pat gk = 0.55 mm und für pat bb 0.17 mm.
Stabilität des Optimierungsverfahrens
Der Optimierungsalgorithmus wurde hinsichtlich seiner Stabilität untersucht.
Das Ziel war, zu analysieren, wie sich das Verfahren bei lokalen Extremwerten
verhält, und inwiefern es sich an die mittels Brute Force Methode gefundenen
Optima annähert.
Die Tabellen 5.6 und 5.7 zeigen die Ergebnisse von jeweils 10 Testläufen mittels
Powells Direction Set–Methode. Für den Datsatz pat gk zeigte sich, dass die
jeweils ermittelten Transformationsparameter sehr stabil sind. Die Varianz bei
der z–Translation geht gegen null. Für die x–Translation liegt σ 2 unter 0, 5
mm2 . Auch für ϕ und ty verhält sich der Algorithmus stabil.
2
2
Tabelle 5.6: Ergebnisse von 10 mit Powell durchgeführten Testläufen für den
Datensatz pat gk (Angaben in Voxelkoordinaten).
Bei der automatische Registrierung des Datensatzes pat bb schwankte die Stabilität leicht. Doch insgesamt waren auch hier die erzielten Resultate zufriedenstellend.
Betrachtet man die Werte in Tabelle 5.7 genau, wird man feststellen, dass es bei
den Tests mit pat bb zwei Ausreißer “ gab, nämlich Run 1 und Run 3. Hierbei
”
handelt es sich um folgendes Problem:
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
88
2
2
Tabelle 5.7: Ergebnisse von 10 mit Powell durchgeführten Testläufen für den
Datensatz pat bb (Angaben in Voxelkoordinaten).
Fehlregistrierung aufgrund lokaler Optima Das Optimierungsverfahren
bewegt sich immer weiter in Richtung eines gefundenen Extremums. Dabei ist
es egal, ob es sich um einen globalen oder einen lokalen Extremwert handelt.
Ist letzteres der Fall ist ein falsches Registrierungsergebnis die Folge.
Im Fall von Datensatz pat bb soll Abbildung 5.10 den Verlauf von Normalized
Mutual Information veranschaulichen. Die Gütefunktion wurde für konstante
tx = −6.34 und ty = 17, 5 (Mittelwerte des Stabilitätstests, siehe Tab. 5.7)
bestimmt.
Das lokale Maximum, welches in Run 1 gefunden wurde, ist bei z–Trans = 1
gut zu erkennen.
Bei der Optimierung können solche Probleme immer entstehen. Eine einfache
Idee zur Lösung des Problems ist es, dass man mehrere Registrierungen mittels
Powell durchführt. Danach nimmt man den Parametervektor, für den der Maximalwert der Gütefunktion berechnet wurde. Auf diese Weise wurden sämtliche
weiteren Registrierungen der Arbeit durchgeführt. Fehlregistrierungen aufgrund
lokaler Extrema traten nicht mehr auf.
5.2.4
Registrierung unsegmentierter Datensätze
Das letzte Experiment zur rigiden Registrierung beschäftigte sich mit der Frage, ob die manuelle Entfernung der sichtbaren Teile der Bestrahlungsapparatur
aus den CT–Volumina wirklich notwendig ist. Zu diesem Zweck wurden die
Datensätze bis auf den Segmentierungsschritt wie gewohnt vorverarbeitet. Danach wurden sie mit Powell registriert. Es ergaben sich folgende Transformati-
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
89
Abbildung 5.10: Verlauf von Y unter verschiedenen z–Translationen und z–
Rotationen für pat bb , lokales Minimum bei z–Trans ≈ 1
onsparameter (Angabe in externen Voxelkoordinaten, gemittelt über jeweils 10
Testläufe):
−0,60
−2,06
parpat gk =
15,43
−5,47
−6,22
18,70
.
und parpat bb =
4,84
−1,40
Tabelle 5.8 zeigt den Überlagerungsfehler der transformierten Landmarken.
Für pat bb bleibt das Registrierungsergebnis gleich. Dies ist bei pat gk nicht der
Fall; hier wird ein anderer Wert für die z–Transformation tz gefunden. Dieser
liegt genau 1 Voxel (6 mm) neben dem Optimum aus manueller und automatischer Registrierung. Der Fehler der Landmarkenüberlagerung steigt durch
diese Verschiebung leicht an. Dies läßt auf ein schlechteres Registrierungsergebnis schließen. Wie der Qualitätsverlust in der Landmarkenüberlagerung zu
bewerten ist, steht nicht fest. Vergleicht man nämlich das für pat gk erreichte Registrierungsergebnis mit der manuell erzeugten Überlagerung, sieht man,
dass der Fehler gleich groß ist. In diesem Sinne ist die Transformation ähnlich
gut wie die manuell gefundene.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
Tabelle
5.8:
Überlagerungsfehler
der
Landmarken
markers gk
90
und
markers bb nach Registrierung der unsegmentierten Bilder (Angaben in
mm).
5.2.5
Zusammenfassung der rigiden Registrierungsexperimente
Vergleich der Transformationsparameter
Mit allen Verfahren wurden recht ähnliche Transformationsparameter ermittelt.
Besonders bei der z–Transformation kam es nur zu sehr geringen Abweichungen
(< 3 mm), abgesehen von der Registrierung unsegmentierter Volumina. In z–
Richtung musste gleichzeitig die größte Transformation durchgeführt werden.
Insofern stabilisiert ein guter Translationsparameter tz gleichzeitig die gesamte
rigide Registrierung.
In Tabelle 5.9 sind die mit den einzelnen Verfahren gefundenen Transformationsparameter aufgeführt.
Qualitätsabschätzung mittels Landmarken
Die folgenden Tabellen 5.10 und 5.11 führen noch einmal die berechneten Überlagerungsfehler für die einzelnen rigiden Registrierungsverfahren auf. Die zweite
Spalte (Preproc.) zeigt die Werte des anfänglichen Überlagerungsfehlers nach
der Vorverarbeitung und dient dem Vergleich. Der geringste Überlagerungsfehler wurde mittels Brute-Force-Methode erzielt.
Die Qualität von Normalized Mutual Information Y als Gütemaß ist sehr gut.
Der Überlagerungsfehler veringerte sich im Durchschnitt um 80%.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
91
Tabelle 5.9: Mit den einzelnen Registrierungsansätzen ermittelte Transformationsparameter für pat gk und pat bb (Angaben in Voxelkoordinaten — externes
Koordinatensystem)
Tabelle
5.10:
Vergleich
der
Überlagerungsfehler
der
Landmarken
markers gk (Angaben in mm).
Performance
Der verwendete Brute–Force–Algorithmus hatte mit stark eingeschränktem
Suchraum immer noch eine Laufzeit
TBruteF orce ≈ 4h.
Dagegen benötigte der Registrierunsalgorithmus mit Powell im Durchschnitt
TP owell ≈ 10min.
Die Abweichungen der Landmarken machen deutlich, dass die Qualität der so
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
Tabelle
5.11:
Vergleich
der
Überlagerungsfehler
der
92
Landmarken
markers bb (Angaben in mm).
erreichbaren Überlagerung nicht ausreicht, um die MRT–Volumina zur Bestrahlungsplanung einsetzen zu können. Diese Aussage wird bekräftigt, wenn man
sich den maximalen Überlagerungsfehler der Landmarken betrachtet. Dieser
liegt bei ≈ 40 mm.
Inwiefern es möglich ist auf die Segmentierung zu verzichten, kann hier nicht
endgültig entschieden werden. Für den Datensatz pat bb war die mit den unsegmentierten Daten erreichte Überlagerung qualitativ mit der Überlagerung
der segmentierten Daten vergleichbar. Dies galt für den zweiten Datensatz
pat gk nicht. Hier verschlechterte sich vor allem die z–Translation. Der Überlagerungsfehler der Landmarken stieg an.
Für die nicht–rigide Registrierung kann festgehalten werden, dass die untersuchten rigiden Registrierungsverfahren sich eignen, einen guten Ausgangspunkt für
die nicht–rigide Registrierung zu finden.
Dabei kommt es darauf an, dass nach der rigiden Registrierung die Volumina
in ihren großen anatomischen Strukturen gut überlagert sind. Da viele nicht–
rigide Transformationen nur der Modellierung kleiner lokaler Deformationen
dienen, ist eine solche rigide Überlagerung oft Voraussetzung für das Gelingen
der nicht–rigiden Transformation.
Überlagerung der Leber
Abgesehen von der verbesserten Gesamtüberlagerung der Volumina kommt man
mit der rigiden Registrierung auch dem Hauptziel der Arbeit, der Überlagerung
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
93
der Leber und ihrer Tumoren näher.
Für den Datensatz pat gk wurden jeweils 3 Landmarken im sichtbaren Tumor
definiert. Tabelle 5.12 zeigt den durchschnittlichen Abstand der Landmarken
(MSE).
Tabelle 5.12: Vergleich der Überlagerungsfehler der Tumormarker für
pat gk (Angaben in mm).
Für die mittels Brute–Force–Registrierung gefundene Transformation ist der
Abstand am kleinsten, die mit dem Powell–Verfahren erzielte Überlagerung ist
im Vergleich zum Brute–Force–Wert akzeptabel.
5.3
Registrierungsversuche mit nicht–rigiden Transformationen
In Kapitel 4, S. 60, wurde die Thin-Plate Spline–Interpolation eingeführt und
detailliert erläutert. Die mit dieser Transformation durchgeführten Experimente
werden nun vorgestellt.
5.3.1
2D–Thin-Plate Spline–Interpolation
Geht man davon aus, dass die mittels rigider Registrierungsverfahren bestimmte
Transformation TRigid die Volumina in z–Richtung bereits korrekt überlagert,
kann man die nachfolgende nicht–rigide Registrierung der 3D–Daten zu einem
Registrierungsproblem der 2D–Schichtbilder vereinfachen. Es werden zunächst
zweidimensionale Phantomdatensätze registriert. Danach werden rigide registrierte Schichtbilder der Datensätze pat bb und pat gk interpoliert.
Manuelle Kontrollpunktwahl
Ein Weg, die für die Thin-Plate Spline–Transformation benötigten Kontrollpunkte zu erhalten, ist die manuelle Definition der Kontrollpunkte durch den
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
94
Benutzer. Dabei kam das im Rahmen der Arbeit entstandene Markertool zum
Einsatz.
Referenz
Modell
transformiertes Modell
Abbildung 5.11: Oben: Referenz und Modell aus Datensatz PHANTOM SIMPLE
mit eingezeichneten Kontrollpunkten, unten: transformiertes Modell (ohne und
mit Kontrollgitter)
Abbildung 5.11 zeigt Referenz und Modell des Phantomdatensatzes PHANTOM SIMPLE mit 16 manuell definierten Kontrollpunkten. Die untere Reihe
zeigt das transformierte Modellbild, jeweils einmal mit und ohne Kontrollgitter. Anhand des Kontrollgitters wird deutlich, wie sich die Thin-Plate SplineInterpolation auf ein Bild auswirkt.
Automatische Kontrollpunktsuche
Der in Kapitel 4.4.3 erläuterte Algorithmus von Likar et al. [22] wird zuerst auf
seine Korrektheit geprüft.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
95
Dazu soll das Phantom PHANTOM COMPLEX automatisch registriert werden.
In Abbildung 5.12 sind das Referenz– und Modellbild dargestellt. Außerdem
zeigt die Abbildung die Ergebnisse der ersten vier Level des Verfahrens.
Referenz
Modell
Level 1
Level 2
Level 3
Level 4
Abbildung 5.12: Ergebnis der automatischen Registrierung von PHANTOM COMPLEX mit Thin-Plate Splines nach Ansatz von Likar
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
96
In Level 1 werden die Bilder in 4 Teilbilder unterteilt, in Level 2 in 16 Teilbilder
usw.
Die sich während der einzelnen Verarbeitungsstufen verbessernde Übereinstimmung des Modells mit der Referenz wird sehr deutlich.
Automatische Registrierung von Schichtbildern aus pat gk und
pat bb
Das Verfahren wurde im nächsten Schritt auf pat gk angewandt. Dazu
wurden die Transversalschichten mittels zweidimensionaler Thin-Plate Spline–
Interpolation transformiert. Dafür wird eine gute Überlagerug in z–Richtung
vorausgesetzt.
Referenz
Modell
Abbildung 5.13: Referenz– und Modellschichtbilder aus pat gk
Abbildung 5.13 zeigt die Referenz– und Modellschicht, welche für die lokale
elastische Registrierung verwendet wurden.
Level 1
R1
d
Level 3
Level 2
R1
d
R1
d
Abbildung 5.14: Ergebnis der automatischen Registrierung von Schichten aus
pat gk mit Thin-Plate Splines nach Ansatz von Likar
Abbildung 5.14 zeigt das Ergebnis des Registrierungsversuches von Schichten
aus pat gk . Die starke Deformation des Bauchraumes wird im zweiten und
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
97
dritte Verfeinerungsschritt ansatzweise modelliert (vgl. eingerahmter Bereich
in 5.14). Eine korrekte Modellierung der Deformation der Leber findet nicht
statt. Anstatt die Leber in y–Richtung zu dehnen, wird sie immer breiter (vgl.
d 5.14).
Je kleiner die Teilbilder werden, desto weniger statistische Aussagekraft haben
die Histogramme (siehe [22] oder [23]). In Abbildung 5.15 wird das Ergebnis der
automatischen Registrierung von 2D–Schichtbildern aus pat bb dargestellt. In
Level 4 werden bereits falsche lokale Transformationen berechnet, was gut an
der Veränderung der äußeren Kontur zu erkennen ist. Damit ist die maximale
Tiefe erreicht.
Die Deformationen der Leber werden auch für den Datensatz pat bb nicht erfasst. Das liegt vor allem an der Homogenität des Lebergewebes, dessen Grauwerte nicht genug Information für bessere lokale Transformationen liefern.
5.3.2
3D–Thin-Plate Spline–Interpolation
Die letzten Versuche dienten der elastischen Transformation kompletter dreidimensionaler Volumendatensätze. Zuerst sollen die Experimente mit manueller
Kontrollpunktwahl vorgestellt werden. Danach werden die Versuche zur automatischen 3D–Registrierung vorgestellt.
3D–Registrierung mit manueller Kontrollpunktwahl
Für die manuelle elastische dreidimensionale Registrierung wurden Landmarken definiert. Danach wurde die Thin-Plate Spline–Interpolation berechnet; das
Modellvolumen wurde transformiert.
Die mit diesem Verfahren erzielten Ergebnisse sollen am Beispiel von Datensatz
pat gk vorgestellt werden. Abbildung 5.16 vergleicht einen Transversalschnitt
des transformierten MR–Tomogramms aus Datensatz pat gk mit dem Referenz–
CT und dem Modell–MRT.
Es fällt auf, dass die rechten Bildteile sehr verzerrt dargestellt werden. Das ergibt sich daraus, dass bei der Kontrollpunktdefinition überwiegend Punkte auf
dem Lebergewebe beziehungsweise nahe der Leber definiert wurden. Ziel ist es,
die Lebern zu überlagern. Die restlichen Bildteile werden bei diesem Arbeitsschritt vernachlässigt. In Abbildung 5.17 wird deutlich, wie sich die Überlagerung nach der elastischen Transformation verändert hat.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
Referenz
Modell
Level 1
Level 2
Level 3
98
Level 4
Abbildung 5.15: Ergebnis der automatischen Registrierung von pat bb mit ThinPlate Splines (hierarcjiche Kontrollpunktberechnung)
Die dargestellten Schichten vermitteln einen ersten Eindruck der erzielten Überlagerung. Anhand einer Teilmenge der Landmarken aus markers gk wurde eine
qualitative Aussage gemacht. Tabelle 5.13 listet noch einmal die Marker auf.
Es handelt sich um Landmarken, die im Lebergewebe, unter anderem auch im
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
Referenz
Modell (rigide registriert)
99
Ergebnis
Abbildung 5.16: Transversale Schichtbilder nach elastischer Transformation
(manuelle Kontrollpunktwahl)
CT - MRT (rigid)
CT - MRT (elastisch)
Abbildung 5.17: Transversale Schichtbilder, links: CT mit rigid registriertem
MRT, rechts: CT mit MRT nach manueller elastischer Registrierung. Das CT
ist jeweils rot dargestellt, das MRT grün.
Tumor, definiert wurden.
Tabelle 5.13: Teilmenge der für die Bewertung der elastischen Registrierung
verwendeten Landmarken
Tabelle 5.14 zeigt den durchschnittlichen Überlagerungsfehler der Landmarken
vor und nach der manuellen elastischen Registrierung.
Die mittels der Landmarken messbare Überlagerung verbessert sich in y–
Richtung. Der Versuch zeigt, dass eine elastische Deformation modelliert wer-
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
100
Tabelle 5.14: Durchschnittlicher Abstand der Lebermarker des Markerdatensatzes markers gk vor und nach der elastischen Registrierung von Datensatz
pat gk (Angaben in Millimeter )
den kann. Entscheidend über Erfolg und Mißerfolg der Thin-Plate Spline–
Interpolation ist die Wahl der Kontrollpunkte (siehe Kapitel 2, S. 34).
Der letzte Versuch beschäftigt sich mit der automatischen Kontrollpunktsuche.
Automatische 3D–Registrierung
Das Verfahren zur automatischen Kontrollpunktsuche von Likar [22] wurde
für die Registrierung dreidimensionaler Daten modifiziert (siehe Kap. 2.3.6,
ab S.38).
Das Ergebnis der auf diese Weise durchgeführten Versuche wird wieder anhand
der für Datensatz pat gk definierten Lebermarker erörtert. Ausgangspunkt der
Registrierung waren, wie im letzten Abschnitt, ein CT–Referenzvolumen und
das Ergebnis–MRT der mittels Powell berechneten rigiden Transformation.
Tabelle 5.15 zeigt die Entwicklung des Überlagerungsfehlers für die einzelnen
Verfeinerungsschritte der automatischen Registrierung. Es ist festzuhalten, dass
sich der Fehler nach den ersten beiden Schritte jeweils leicht verbessert hat. Im
letzten Schritt (Level 3) verschlechtert sich die Überlagerung. Dies ist eventuell
auf die nachlassende Signifikanz der Grauwertverteilungen zurückzuführen.
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
101
Tabelle 5.15: Durchschnittlicher Abstand der Lebermarker des Markerdatensatz
markers gk vor und nach jeder Verarbeitungsstufe der automatisch–elastischen
Registrierung von Datensatz pat gk (Angaben in Millimeter )
5.3.3
Zusammenfassung der nicht–rigiden Registrierungsexperimente
Der Algorithmus zur automatischen elastischen Überlagerung von 3D–Daten arbeitet korrekt. Jedoch ist vor allem das Lebergewebe zu homogen, um anhand
von Grauwertunterschieden die Deformation der Leber mit Mutual Information
zu erkennen. Aus diesem Grund versucht zwar der Algorithmus eine Deformation zu modellieren; diese weicht allerdings von der realen durch die Bauchplatte
erzeugten Verformung ab.
Überlagerung der Lebertumoren
Mit der manuellen elastischen 3D–Registrierung wurde gezeigt, dass die Abbildung der MRT–Leber auf die CT–Leber realisierbar ist. Das Ziel der Arbeit, die
beiden Tumore zu überlagern, gelingt, indem man geeignete Kontrollpunkte in
den Tumorzentren definiert. Da kein physikalisches Modell für die Bewegung der
Leber sowie für die Bewegung des Tumors vorliegt, kann keine Aussage darüber
gemacht werden, ob der Tumor sich tatsächlich so bewegt und verformt, wie es
die Thin-Plate Spline–Interpolation modelliert.
Falls ein Tumor nicht in beiden Volumina sichtbar ist, kann diese Methode nicht
angewendet werden.
Eine qualitative Aussage über die Überlagerung des Tumors lässt sich anhand
der 3 Tumormarker aus markers gk machen. Tabelle 5.16 zeigt die Abweichun-
KAPITEL 5. ERGEBNISSE DER REGISTRIERUNGSVERSUCHE
102
gen nach der Thin-Plate Spline–Interpolation mit manueller Kontrollpunktwahl
und nach den einzelnen automatischen Registrierungsschritten.
Tabelle 5.16: Vergleich der Überlagerungsfehler der Tumormarker für
pat gk nach den einzelnen elastischen Registrierungen (Angaben in mm).
Die mittels manueller Kontrollpunktwahl parametrisierte Interpolation überlagert die Tumoren fast exakt ( ≈ Durchmesser eines Voxels). Während der
stufenweisen automatischen Registrierung verbessert sich der Abstand anfänglich leicht um ≈ 2 mm, steigt danach aber sofort wieder an (Level 2 und 3).
Die automatische Registrierung kann den Abstand der Tumoren nach der rigiden Überlagerung kaum verbessern.
Kapitel 6
Diskussion und Ausblick
Ziel der Arbeit war festzustellen, ob die Registrierung der CT– und MRT–
Volumendaten der Leber möglich ist, um somit in der Leber vorhandene Tumoren zu überlagern. Eine Besonderheit dabei ist die Deformation des Bauchraumes durch die Abdominalkompression. Es gab keine bekannte Arbeit zu dieser
Problemstellung sowie keine Lösungen ähnlicher Probleme.
Im Rahmen der Arbeit entstand ein Softwarepaket, welches die vorgestellten
Algorithmen und Methoden beinhaltet. Damit ist es möglich, Volumina automatisch zu registrieren und in der Planungssoftware VIRTUOS zur Verfügung
zu stellen. Somit steht die im MRT vorhandene Information über Lage und
Größe der Lebermetastasen für die Strahlentherapieplanung zur Verfügung.
6.1
Diskussion der Ergebnisse
Der implementierte Registrierungsalgorithmus gliedert sich in zwei Phasen und
funktioniert weitgehend automatisch. Die erste Phase registriert die Volumina
mittels globaler rigider Transformationen. Im zweiten Schritt werden die vorher rigide überlagerten Bilder mittels lokaler nicht–rigider Transformationen
registriert.
Die Experimente umfassten folgende Punkte:
• Analyse des gewählten Gütemaßes
• Test der verschiedenen Ansätze zur rigiden Registrierung
• Test
der
nicht–rigiden
Interpolation
Registrierung
mittels
Thin-Plate
Spline–
KAPITEL 6. DISKUSSION UND AUSBLICK
104
• Test eines Verfahrens zur automatischen Kontrollpunktberechnung für die
Thin-Plate Spline–Interpolation
Der Versuch, ein weitgehend automatisches Registrierungsverfahren zu implementieren, war erfolgreich. So ist man jetzt in der Lage, sehr schnell eine rigide
Überlagerung für die Volumina zu erzeugen. Diese rekonstruiert zwar noch nicht
die lokalen elastischen durch die Bauchplatte hervorgerufenen Gewebedeformationen, nähert jedoch die Volumina aneinander an. Dies konnte anhand der
Verkleinerung des Überlagerungsfehlers der Landmarkensätze im vorangegangenen Kapitel gezeigt werden. Im Rahmen der rigiden Registrierung hat sich
Mutual Information als robustes Gütemaß erwiesen.
6.1.1
Einfluss der Abdominalkompression
Die Vermutung, dass die Abdominalkompression nicht–rigide Registrierungsverfahren unbedingt erforderlich macht, konnte in den Versuchen zur rigiden
Registrierung bestätigt werden. Es wurde gleichzeitig der Nutzen der rigiden
Registrierung deutlich. So liefert sie eine erste grobe Überlagerung der Volumina. Diese dient dann als Startpunkt für den zweiten nicht–rigiden Teil der
Registrierung.
Während der zweiten Registrierungsstufe werden lokal–elastische Deformationen modelliert. Dies geschieht unter Anwendung einer Thin-Plate Spline–
Interpolation. Dieses Verfahren basiert auf der Annahme, dass sich das Gewebe
weitgehend wie eine dünne Metallplatte verformen lässt. Dieses sicherlich idealisierte Modell machte es überhaupt erst möglich, lokal–elastische Deformationen nachzubilden. Wenn die Bewegungen des in den Datensätzen dargestellten
Lebergewebes auch nicht auf einem physikalischen Modell basieren, so konnte
trotzdem damit gezeigt werden, dass die Registrierung der CT– und MRT–
Volumendatensätze der Leber möglich ist.
Der Algorithmus zur automatischen Kontrollpunktberechnung erfüllte die Erwartungen nicht. Die durch die Abdominalkompression verursachten Verformungen können mit diesem Verfahren nicht erkannt werden. Die automatisch
berechneten Kontrollpunkte verformen die Bilder zwar lokal elastisch, jedoch
entsprechen die berechneten lokalen Deformationen nicht denen, die durch die
Kompression des Bauchraumes verursacht wurden. Das Verfahren versagt aus
dem Grund, dass die Deformation zu groß ist, um erfasst zu werden.
Gleichzeitig konnte mittels manueller Kontrollpunktdefinition gezeigt werden,
KAPITEL 6. DISKUSSION UND AUSBLICK
105
dass die Abdominalkompression und die sich daraus ergebende Deformation der
Leber mit Thin-Plate Splines modelliert werden kann. Die Definition geeigneter
Kontrollpunkte ist nicht trivial. Da die Qualität der Spline–Interpolation stark
von den gewählten Kontrollpunkten abhängt, steht und fällt die nicht–rigide
Registrierung mit der Qualität der gewählten Kontrollpunkte. Dieser Teil der
Registrierung ist damit stark vom Benutzer abhängig. Die einzige Lösung für
dieses Problem wäre eine funktionierende automatische Berechnung der Kontrollpunkte.
6.1.2
Überlagerung des Tumors
Im Rahmen der Studie sollte gezeigt werden, ob die Registrierung der Leber
möglich ist. Der eigentliche Nutzen für die Bestrahlungsplanung ergibt sich jedoch aus der korrekten Überlagerung der Tumoren. Es konnte nur in Datensatz
pat gk ein Tumor lokalisiert und segmentiert werden. Dieser sah sehr regelmäßig
aus. Der Tumor hatte in den CT– und den MRT–Aufnahmen in etwa die gleiche Form (siehe Kap. 3, Abb. 3.4). Im Fall von Datensatz pat gk verformt die
Abdominalkompression den Tumor selbst nicht. Weder im CT noch im MRT
waren Satellitenmetastasen erkennbar.
Die Qualität der Überlagerung wird anhand des Abstandes von drei manuell auf
dem Tumorgewebe definierten Landmarken bewertet. Die Landmarken befinden
sich im untersten und im obersten Punkt des Tumors (jeweils in z–Richtung)
und im Tumorzentrum.
Tabelle 6.1 zeigt die durchschnittlichen Abstände jeweils nach der Vorverarbeitung (Preproc), nach der rigiden Registrierung (Powell ) und nach Durchführung
der manuellen nicht–rigiden Registrierung (TPS ).
Tabelle 6.1: Erzielte Überlagerung der 3 Tumormarker für pat gk (Angaben in
[mm] )
Die Überlagerung der Tumorlandmarken verbessert sich schon mit der rigiden
Registrierung, was auch zu erwarten war. Wenn alle Strukturen einander an-
KAPITEL 6. DISKUSSION UND AUSBLICK
106
genähert werden, müssen sich zwangsläufig auch die Tumoren einander nähern.
Zusätzlich erkennt man, dass sich während der nicht–rigiden Registrierung vor
allem die Überlagerung in y–Richtung verbessert. Diese y–Verschiebung kann
als Modellierung der Deformationen, die infolge der Abdominalkompression entstehen, angesehen werden.
Abbildung 6.1 zeigt die in VIRTUOS segmentierten und überlagerten Tumoren
aus Datensatz pat gk nach der Registrierung mit dem Powell–Verfahren (links)
und der Transformation mit Thin-Plate Splines (rechts).
Abbildung 6.1: Überlagerung der segmentierten Tumoren nach rigider Registrierung (links) und nicht–rigider Registrierung (rechts) mit Leber aus CT.
Der segmentierte Tumor des Referenz–CT ist jeweils gelb dargestellt.
Schon nach der Anwendung der rigiden Transformation sind die Tumoren teilweise überlagert. Nach der nicht–rigiden Registrierung verbessert sich diese
Überlagerung noch einmal deutlich (rechter Teil von Abbildung 6.1). Die Visualisierung der segmentierten Tumoren bestätigt die in Tabelle 6.1 vorgestellten
Ergebnisse.
Es wurde gezeigt, dass die Information aus den MRT–Datensätzen über Lage
und Größe des Tumors für die Therapieplanung zur Verfügung gestellt werden
können. Ob und wieviel die erreichte Überlagerung zur Verbesserung der Behandlungsplanung beiträgt, kann im Rahmen dieser Arbeit nicht abgeschätzt
werden.
6.1.3
Analyse der Bewertungsmechanismen
Es erwies sich als schwierig, die Registrierungsergebnisse qualitativ zu bewerten.
Während der einzelnen Experimente wurden die erzielten Bildüberlagerungen
immer wieder anhand der visuell sichtbaren Überlagerung bewertet. Eine Be-
KAPITEL 6. DISKUSSION UND AUSBLICK
107
wertung dieser visuellen Überlagerung ist sehr kompliziert, da hierbei CT– mit
MRT–Daten verglichen werden müssen. In den beiden Verfahren wird aber das
gleiche Gewebe, zum Beispiel die Schichten der Leber, durch unterschiedliche
Grauwertintensitäten dargestellt. Aus diesem Grund ist es auch schwierig, anatomisch identische Punkte korrekt zu identifizieren.
Die als zweites Gütekriterium verwendeten Landmarken sind aufgrund der beschriebenen Problematik ebenfalls schwer zu finden.
Da kein besseres Qualitätsmaß zur Verfügung stand, wurde trotz dieser möglichen Fehlerquellen entschieden, die Qualität der Registrierungsergebnisse anhand von Landmarken zu bewerten.
Letztendlich müssen die Ergebnisse durch einen Arzt validiert und beurteilt
werden.
6.1.4
Qualität der Datensätze
Zur Durchführung der Studie wurden vom DKFZ Heidelberg zwei Datensätze
zur Verfügung gestellt. Beide hatten eine gute Qualtität. Sie wurden im Hinblick
auf diese erste Machbarkeitsstudie ausgewählt und stellen in ihrer Qualität keine
repräsentativen Datensätze dar.
Die erzielten Ergebnisse zeigen, dass die Registrierung der Lebervolumina prinzipiell funktioniert. Sie lassen jedoch nicht die Schlussfolgerung zu, dass das
entwickelte Registrierungsverfahren in jedem Fall funktioniert.
Es können keine Aussagen darüber gemacht werden, wie sich der Registrierungsalgorithmus verhält, wenn die Qualität der Bilder, zum Beispiel durch
aufnahmebedingte Artefakte, abnimmt.
Interpolationsfehler der nicht–rigiden Transformation
Die Thin-Plate Spline–Interpolation wurde mittels einer Vorwärtstransformation berechnet. Bei der Implementierung dieser Transformation ergaben
sich Schwierigkeiten bezüglich Interpolationsartefakten, welche durch intensives Oversampling teilweise behoben werden konnten. Die Folge des Oversampling war jedoch ein Verwischen scharfer Kanten und eine erhöhte Helligkeit der
Grauwerte der nicht–rigide transformierten Bilder. Dies führte zu einem allgemeinen Qualitätsverlust in den Bildern, bei dem vor allem Details der Aufnahmen verlorengehen können. Eventuell muss die Implementierung diesbezüglich
KAPITEL 6. DISKUSSION UND AUSBLICK
108
modifiziert werden. So kann man untersuchen, ob an Stelle der verwendeten
trilinearen Interpolation mit einer bikubischen Interpolation, die feine Details
erhalten soll, bessere Ergebnisse erzielt werden.
6.2
Ausblick
Die Ergebnisse der Arbeit zeigen, daß die Abdominalkompression mittels der
entwickelten Verfahren modelliert werden kann. Die Studie war erfolgreich. Inwiefern die erreichte Registrierungsgüte den Anforderungen der dreidimensionalen Strahlentherapieplanung genügt, kann im Rahmen dieser Arbeit nicht
beurteilt werden.
Die lokal elastischen Bewegungen der Leber wurden in der Arbeit nicht mittels eines physikalischen Modells simuliert. Inwiefern die tatsächlichen Bewegungen der Leber überhaupt mittels Spline–Interpolationen nachgebildet werden dürfen, muss untersucht werden. Eine Möglichkeit wäre, einen zusätzlichen
CT–Datensatz des undeformierten Bauchraumes aufzunehmen. Die Deformation sollte dann der einzige Unterschied des unter Abdominalkompression aufgezeichneten CT sein. Die Korrektheit des Defomationsmodells kann anhand
eines solchen Volumenpaares wesentlich besser abgeschätzt werden.
In weiteren Arbeitsschritten kann man versuchen die manuelle Segmentierung durch ein automatisches Segmentierungsverfahren abzulösen. Verschiedene Ansätze, wie zum Beispiel das Region–Growing, der Watershed–Algorithmus
oder Verfahren zur Kantendetektion, wären vorstellbar.
Vor allem die zweite Phase des Überlagerungsverfahrens, die nicht–rigide Registrierung, muss weiterentwickelt werden. Die Schwächen der automatischen
Kontrollpunktberechnung müssen genau analysiert und beseitigt werden. Im
Hinblick auf die schwache statistische Signifikanz von Histogrammen kleiner
Teilbilder bleibt die Frage offen, ob man mit dem gewählten entropiebasierten
Ansatz letztendlich erfolgreich sein wird. Vorstellbar ist auch die Möglichkeit,
mittels Segmentierungsverfahren die für die beschriebene Thin-Plate Spline–
Interpolation notwendigen Kontrollpunkte automatisch zu berechnen.
Es bleibt zu untersuchen, inwiefern sich der Registrierungsalgorithmus bei der
Verarbeitung neuer Datensätze als stabil erweist. Die entwickelten Registrierungsalgorithmen müssen als nächstes an einer größeren Menge von Datensätzen
validiert werden.
KAPITEL 6. DISKUSSION UND AUSBLICK
109
Danach kann damit begonnen werden, die automatische Registrierung in die
Bestrahlungsplanungssoftware des DKFZ Heidelberg — VIRTUOS — einzubinden. Letztendlich muss eine Studie angefertigt werden, inwiefern die neuen Registrierungsverfahren tatsächlich zur Verbesserung der dreidimensionalen
Strahlentherapieplanung beitragen.
Eventuell kann das vorgestellte Verfahren auch zur Registrierung anderer medizinischer Bilddaten verwendet werden. Am DKFZ Heidelberg werden ebenfalls
Registrierungsverfahren zur Verbesserung der Strahlentherapiebehandlung von
Metastasen in Lunge und Prostata erforscht. Inwieweit die entwickelten Algorithmen zur Lösung solcher und ähnlicher Probleme genutzt werden können,
muss untersucht werden.
Die Software kann prinzipiell für alle Registrierungsprobleme angewendet werden, die die Überlagerung multimodaler Daten, speziell weichen Gewebes, zum
Ziel haben.
Die Arbeit hat gezeigt, dass es möglich ist, die Daten des Planungs–CT mit denen der Magnetresonanztomogramme korrekt zu überlagern. Auf diesem Weg
können die aus dem MRT gewonnenen Kenntnisse über Größe und Lage des Tumors für die Strahlentherapiebehandlung zugänglich gemacht werden. Es kann
nun versucht werden, die Behandlung von Lebermetastasen auf diesem Wege
zu verbessern.
Anhang A
Software
Im Folgenden werden die wichtigsten während der Arbeit entwickelten Programmteile erläutert. Die Implementierung wurde komplett in Java realisiert.
Die Software stellt für alle in der Arbeit entwickelten Verfahren Werkzeuge
zu Verfügung. Die wichtigsten dieser Werkzeuge sollen an dieser Stelle exemplarisch beschrieben werden. Für detaillierte Informationen greife man auf die
Dokumentation des Quellcodes sowie auf die JavaDoc–Beschreibung zurück.
A.1
Bedienungsanleitung
RegistrationTool
Durch den Befehl
java -Xmx256m imgproc.graphics.RegMainFrame
wird eine einfache graphische Oberfläche gestartet, welche die Möglichkeit bietet, alle in der Arbeit vorgestellten Verfahren zu parametrisieren, zu starten
und zu testen.
Unter anderem bietet sie die Möglichkeit, die Daten vorzuverarbeiten, Volumina
zu lesen und zu schreiben, und rigide und nicht-rigide Registrierungsprozesse
zu starten.
Man beachte, dass die Volumendatensätze sehr groß sein können. Die Größe
eines Volumens der Dimension 512 × 512 × 73 Voxel beträgt:
512 × 512 × 73 ≈ 20 Millionen Voxel × 2 Byte ≈ 38 MByte.
110
ANHANG A. SOFTWARE
111
Deshalb muss der Java–Virtual–Machine (VM) beim Start genügend Speicher
zur Verfügung gestellt werden. Der Parameter -Xmx256m bedeutet, dass 256
MByte Speicher für die Java–VM reserviert werden.
Zusätzlich stehen noch andere Komponenten zur Verfügung, welche im Rahmen
der Arbeit entstanden.
Visualisierung
Zur einfachen Darstellung von transversalen Schichtbildern dient die Klasse
imgproc.graphics.Visualizer.
Sie kann von der Kommandozeile aus gestartet werden. Durch den Aufruf:
java imgproc.graphics.Visualizer <file name> [<X> <Y> <Z>]
wird das mittels <file name> referenzierte Volumen geladen. Lesbare Dateiformate sind das CTX-Format und das RAW-Datenformat. Liegen die Bilder im RAW-Format vor, erwartet das Programm zusätzlich zur Eingabe des
Dateinamens auch noch die Bilddimensionen <X>, <Y> und <Z>. Mittels des
Visualisierungs–Werkzeuges können die einzelnen transversalen Schichten der
Volumendatensätze betrachtet werden. Außerdem bietet es die Möglichkeit, das
Grauwerthistogramm anzuschauen. Im Histogramm selbst können die Grauwerte skaliert werden. Die jeweils sichtbare Schicht eines Volumens kann im
JPEG-Format gespeichert werden.
Zusätzlich wurde eine einfache Editierfunktion implementiert. Diese bietet die
Möglichkeit, rechteckige Bildbereiche mit der Maus zu selektieren und zu
löschen. So können Teile der Volumina gelöscht werden. Löschen bedeutet hier
das Zurücksetzen der Grauwerte auf 0.
Landmarkenanalyse
Mit der Klasse
imgproc.graphics.MarkerModificationPanel.
können Markerlisten gelesen, modifiziert und gespeichert werden.
Beispiel:
Mit dem Powellverfahren wurde für zwei Volumina eine rigide Transformation
berechnet. Die für die beiden Volumina definierten Landmarken können mit
Hilfe dieses Tools geladen werden. Danach kann durch manuelle Konfiguration
ANHANG A. SOFTWARE
112
eine rigide Transformation parametrisiert und auf die geladenen Landmarken
angewendet werden. Die sich daraus ergebenden transformierten Landmarken
können analysiert und gespeichert werden. Die Analyseergebnisse sind skalierbar, wodurch Voxelangaben in metrische Angaben umgerechnet werden können.
Zusätzlich können auch die berechneten Analyseergebnisse als Comma Separated Values gespeichert werden.
Das Programm wurde für die landmarkenbasierte Analyse von Registrierungsergebnissen entwickelt.
A.2
Implementierung
Die entwickelten Programmteile wurden verschiedenen Packages zugeordnet:
imgproc.graphics Dieses Package enthält alle Klassen, die graphische Schnittstellen implementieren. Unter anderem finden sich hier auch die weiter oben
bereits vorgestellten Klassen Visualizer und RegMainFrame wieder.
imgproc.lang
In diesem Package wurden die Basisdatentypen der entwickelten
Bildverarbeitungssoftware zusammengefasst. Den Kern der gesamten Software
stellt die Klasse
java.lang.Volume
dar. Sie ist die Datenstruktur, die zur Verwaltung der Volumendatensätze dient.
Gleichzeitig wurden alle wichtigen Basisoperationen, die ein Volumen modifizieren, direkt an diese Klasse gebunden. Ein Volumen bietet mehrere Möglichkeiten
zur Skalierung, Translation und Rotation. Alle rigiden Transformationen wurden mittels homogener Matrixmultiplikation implementiert. Es besteht auch
die Möglichkeit, über den Parameter transformLater die direkte Anwendung der
Transformationen zu verzögern. Alle Transformationen werden dann nur gespeichert, das transformierte Bild wird jeweils aus der gespeicherten Transformation
berechnet.
imgproc.match Dieses Package fasst alle rigiden und nicht–rigiden Transformationen zusammen. Des Weiteren enthält es die implementierten Gütefunktionen.
Die Klasse
ANHANG A. SOFTWARE
113
java.match.RigidMatching
implementiert das Powell–Verfahren. Sie ist ebenfalls Bestandteil dieses Packages.
Externe Packages
Während der Implementierung der Thin-Plate Spline–Interpolation wurde zur
Lösung einiger Matrixoperationen das am CERN entwickelte Package
cern.colt.matrix
verwendet, welches beispielweise eine effiziente Implementierung zur Lösung
linearer Gleichungssysteme anbietet.
A.3
Datenformate
Um die erzielten Ergebnisse auch in der Planungssoftware analysieren zu
können, besteht die Möglichkeit, die überlagerten Volumina in ihrer Auflösung
an die Originalvolumina — im Normalfall ein Referenz–CT — anzupassen. Die
Volumina werden dazu neu abgetastet, gespeichert und sind mittels VIRTUOS
lesbar.
Format der Volumendatensätze
Die Volumendaten werden im CTX“–Format gespeichert. Zusätzlich werden
”
die Daten komprimiert. Zu jedem Datensatz gehört eine Headerdatei (mit Dateikürzel .hed “). In der Headerdatei sind die Größe, die dem Datensatz zu”
grundeliegenden Aufnahmemodalitäten, sowie die Position des Volumens im
Koordinatensystem von VIRTUOS gespeichert.
Speicherung von Landmarken
Zur qualitativen Kontrolle der Registrierungsergebnisse sowie zur Durchführung
der Spline-Interpolationen werden immer wieder Kontrollpunktpaare benötigt.
Zur Speicherung der Landmarken wurde das folgende Datenformat definiert.
ANHANG A. SOFTWARE
114
Marker List–Dateiformat
Zur Speicherung von Landmarken und Kontrollpunkten wird das mls–Format
verwendet; dieses sieht folgendermaßen aus:
markercount: number_of_markers
LEERZEILE
# hier kommen die Marker in folgendem Format:
# marker_name
reference_marker_pos
model_marker_pos
tumor_center
(45,78,17)
(40,74,17)
leber_unterster_punkt
(107,129,4)
(40, ,17)
.
.
.
# usw.
Das Dateiformat ermöglicht eine einfache Speicherung und Verwaltung der
Landmarkendatensätzen.
Literaturverzeichnis
[1] J.M. Balter, R.K. Ten Hawken, T.S. Lawrence, K.L. Lam, and J.M. Robertson. Uncertainties in CT–Based Radiation Therapy Planning Associated with Patient Breathing. International Journal of Radiation Oncology,
Biology and Physics, 36:167–174, 1996.
[2] R. Bendl. Virtuelle Strahlentherapie mit VIRTUOS. In Dreidimensionale
Strahlentherapieplanung, April 1995.
[3] R. Bendl, J. Pross, A. Höss, M.A. Keller, K. Preiser, and W. Schlegel.
VIRTUOS — A Program for Virtual Radiotherapy Simulation and Verification. In 11th International Conference on the Use of Computers in
Radiation Therapy, 1994.
[4] H. Blomgren, I. Lax, H. Göranson, T. Kræpelien, B. Nilsson, I. Näslund,
R. Svanström, and A. Tilikidis. Radiosurgery for Tumors in the Body:
Clinical Experience Using a New Method. Journal of Radiosurgery, pages
63–74, 1998.
[5] H. Blomgren, I. Lax, I. Näslund, and R. Svanström. Stereotactic High Dose
Fraction Radiation Therapy of Extracranial Tumors Using an Accelerator.
In Acta Oncologica 34, pages 861–870, 1995.
[6] W. Boehm and H. Prautzsch. Geometric Concepts for Geometric Design.
A K Peters, Wellesley, Massachusetts, 1993.
[7] J.L. Boes, P.H. Bland, T.E. Weymouth, L.E. Quint, F.L. Bookstein, and
C.R. Meyer. Generating a Normalized Geometric Liver Model Using Warping. In Investigative Radiology, volume 29, pages 281–286, 1994.
[8] F.L. Bookstein. Principal Warps: Thin-Plate Splines and the Decomposition of Deformations. In IEEE Transactions On Pattern Analysis and
Machine Intelligence, volume 11 No. 6, pages 576–585, June 1989.
115
LITERATURVERZEICHNIS
116
[9] A Collignon, F. Maes, D. Delaere, D. Vandermeulen, P. Suetens, and
G. Marchal. Automated Multi–Modality Image Registration Based on
Information Theory. Information Processing in Medical Imaging, pages
262–274, 1995.
[10] M.H. Davis, A. Khotanzad, D.P. Flamig, and S.E. Harms. A Physics–Based
Coordinate Transformation for 3–D Image Matching. In IEEE Transactions On Medical Imaging, volume 16, No. 3, pages 317–328, June 1997.
[11] J. Duchon. Interpolation des Functions de deux Variables suivant les Principes de la Flexion des Plaques Minces. RAIRO Analyse Numerique, 1976.
[12] R.O. Duda and P.E. Hart. Pattern Classification and Scene Analysis. John
Wiley & Sons, 1973.
[13] M. Fornefett, K. Rohr, and S. S. Stiehl. Radial Basis Functions with
Compact Support for Elastic Registration of Medical Images. In Workshop
on Biomedical Image Registration (WBIR’99), pages 173–185, 1999.
[14] J.V. Hajnal, D.L.G. Hill, and D.J. Hawkes. Medical Image Registration.
CRC Pree, 2001.
[15] K.K. Herfarth, J. Debus, F. Lohr, M.L. Bahner, P. Fritz, O. Pastyr,
W. Schlegel, and M.F. Wannenmacher. Extracranial Stereotactic Radiation Therapy: Set–Up Accuracy of Patients Treated for Liver Metastases.
International Journal of Radiation Oncology, Biology and Physics, 46:329–
335, 2000.
[16] K.K. Herfarth, J. Debus, F. Lohr, M.L. Bahner, B. Rhein, P. Fritz, A. Höss,
W. Schlegel, and M.F. Wannenmacher. Stereotactic Single Dose Radiation
Therapy of Liver Tumors: Results of a Phase i/ii Trial. Journal of Clinical
Oncology, 19:164–170, 2001.
[17] D.L.G. Hill, P.G. Batchelor, M. Holden, and D.J. Hawkes. Medical Image
Registration. Physics in Medicine and Biology, pages R1–R45, 2000.
[18] A Höss, J. Debus, R. Bendl, R. Engenhardt-Cabillic, and W. Schlegel.
Computerverfahren in der dreidimensionalen Strahlentherapieplanung. Radiologe, (35):583–586, 1995.
[19] J. Kohlrausch, K. Rohr, and S. Stiehl. A New Class of Elastic Body Splines
for Nonrigid Registration of Medical Images. In Proceedings des Workshops
Bildverarbeitung für die Medizin, pages 164–168, März 2001.
LITERATURVERZEICHNIS
117
[20] H.W. Korin, R.L. Ehman, S.J. Riederer, J.P. Felmlee, and R.C. Grimm.
Respiratory Kinematics of the Upper Abdominal Organs: A Quantitative
Study. Magnet. Reson. Med., 23:172–178, 1992.
[21] I. Lax, H. Blomgren, I. Näslund, and R. Svanström. Stereotactic Radiotherapy of Malignancies in the Abdomen. In Acta Oncologica 33, pages
677–683, 1994.
[22] B. Likar and F. Pernus. A Hierarchical Approach to Elastic Registration
Based on Mutual Information. In Image and Vision Computing, pages
33–44, 1999.
[23] J.B.A. Maintz, E.H.W. Meijering, and M.A. Viergever. General Multimodal Elastic Registration Based on Mutual Information. In Medical Imaging,
Image Processing. SPIE, 1998.
[24] C.R. Maurer Jr. and J.M. Fitzpatrick. A Review of Medical Image Registration. In Interactive Imageguided Neurosurgery, pages 17–44, 1993.
[25] J. Meinguet. Multivariate Interpolation at Arbitrary Points made simple.
Zeitschrift für angewandte Mathematik und Physik, pages 292–304, 1979.
[26] J.P.W. Pluim, J.B.A. Maintz, and M.A. Viergever. Interpolation Artefacts
in Mutual Information Based Image Registration. Computer Vision and
Image Understanding, 1999.
[27] P. Pokrandt. Automatische Überlagerung medizinischer Bilddatensätze.
Fortschritt-Berichte VDI Reihe, 10(464), 1997.
[28] William H. Press, Saul A. Teukolsky, William T. Vettterling, and Brian P.
Flannery. Numerical Recipes in C. Cambridge University Press, second
edition, 1994.
[29] J. Proß. 3D Imaging Bestimmung von Zielvolumen und Risikoorganen. In
Dreidimensionale Strahlentherapieplanung, April 1995.
[30] P Rogelj and S. Kovacic. Local Similarity Measures for Multimodal Image
Matching. In International Workshop on Image and Signal Processing and
Analysis, 2000.
[31] T. Rohlfing, C.R. Maurer Jr., W.G. O’ Dell, and J. Zhong. Modeling Liver
Motion and Deformation During the Respiratory Cycle Using Intensity–
Based Free–Form Registration of Gated MR Images. In Visualization,
LITERATURVERZEICHNIS
118
Display and Image–Guided Procedures, volume 4319, pages 337–348. SPIE,
2001.
[32] K. Rohr, H.S. Stiehl, R. Sprengel, W. Beil, T.M. Buzug, J. Weese, and
M.H. Kuhn. Point–Based Elastic Registration of Medical Image Data
Using Approximating Thin-Plate Splines. In Visualization in Biomedical
Computing, pages 297–306, 1996.
[33] N.V. Ruiter. Matching von Mammogrammen und dreidimensionalen MR–
Daten. Master’s thesis, Unverität Heidelberg / Fachhochschule Heilbronn,
Forschungszentrum Karlsruhe, 2000.
[34] N.V. Ruiter, T.O. Müller, R. Stotzka, and W.A. Kaiser. Elastic Registration of X–ray Mammograms and Three–dimensional Magnetic Resonance
Imaging Data. Journal of Digital Imaging, 14:52–55, 2001.
[35] A. Schäffler and Schmidt S. Mensch, Körper, Krankheit. Jungjohann
Verlag, 1995.
[36] C.E. Shannon. A Mathematical Theory of Communication. Bell System
Technical Journal, 27:379–423 and 623–656, July and October 1948.
[37] S. Shimizu, H. Shirato, B. Xo, K. Kagei, Hishioka T., S. Hashimoto, K. Tsuchiya, H. Aoyama, and K. Miyasaka. Three–Dimensional Movement of a
Liver Tumor Detected by High–Speed Magnetic Resonance Imaging. In
Radiotherapy and Oncology, volume 50, pages 367–370, 1999.
[38] C. Studholme, D.L.G. Hill, and D.J. Hawkes. An Overlap Invariant Entropy Measure of 3D Medical Image Alignment. In Pattern Recognition, volume 32, pages 71–86, 1999.
[39] P.A. van den Elsen, E.J.D. Pol, and M.A. Viergever. Medical Image Matching — A Review with Classification. In IEEE Engineering in Medicine
and Biology (12:1), pages 26–39, 1993.
[40] P. Viola. Alignment by Maximization of Mutual Information. PhD thesis,
June 1995.
[41] Website: Asian Liver Center at Stanford University. Asian Liver Center.
URL: http://liver.stanford.edu.
[42] Website: Verbraucherportal der Arzneimittelindustrie. Der Mensch. URL:
http://www.g-netz.de/Der Mensch.
LITERATURVERZEICHNIS
119
[43] K. Wedekind. Analyse, Implementierung und Evaluation von Matchingverfahren in der medizinischen Bildverarbeitung. Master’s thesis, 1995.
[44] William M. Wells III, P. Viola, H. Atsumi, S. Nakajima, and R. Kikinis.
Alignment by Maximization of Mutual Information. Medical Image Analysis, 1995.