Theoretische Mechanik
Werbung

THEORETISCHE MECHANIK
Vorlesungsskript
von
PD Dr. Ralf Greve
Fachbereich Mechanik (AG3)
Technische Universität Darmstadt
Darmstadt 2002
Copyright 2002 Ralf Greve
Dieses Dokument ist unter der Creative-Commons-Attribution-Share-AlikeLizenz (CC-BY-SA) Version 3.0 oder neuer (nach Wahl des Lesers) veröffentlicht.
Es ist Ihnen gestattet:
• Das Werk vervielfältigen, verbreiten und öffentlich zugänglich machen.
• Abwandlungen bzw. Bearbeitungen des Inhaltes anfertigen.
Zu den folgenden Bedingungen:
• Namensnennung. Sie müssen den Namen des Autors/Rechteinhabers
in der von ihm festgelegten Weise nennen.
• Weitergabe unter gleichen Bedingungen. Wenn Sie den lizenzierten Inhalt bearbeiten oder in anderer Weise umgestalten, verändern oder als
Grundlage für andere Inhalte verwenden, dürfen Sie die neu entstandenen Inhalte nur unter Verwendung von Lizenzbedingungen weitergeben, die mit denen dieses Lizenzvertrages identisch, vergleichbar oder
kompatibel sind.
Siehe auch http://creativecommons.org/licenses/by-sa/3.0/de/.
Inhaltsverzeichnis
1 Punktmechanik
1.1 Der Begriff des Massenpunktes . . . . . . . . . . . . . . . . . . .
1.2 Koordinaten- und Bezugssysteme . . . . . . . . . . . . . . . . .
1.3 Die Bahn eines Massenpunktes . . . . . . . . . . . . . . . . . .
1.3.1 Bahn, Geschwindigkeit und Beschleunigung . . . . . . .
1.3.2 Die Bogenlänge als Bahnparameter . . . . . . . . . . . .
1.3.3 Begleitendes Dreibein, Matrix von Frenet . . . . . . . . .
1.3.4 Anwendungen . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Der Impulssatz . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Die Begriffe “Impuls” und “Kraft” . . . . . . . . . . . .
1.4.2 Die Newtonschen Gesetze . . . . . . . . . . . . . . . . .
1.4.3 Mathematische Formulierung . . . . . . . . . . . . . . .
1.4.4 Zur Trägheit . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.5 Die Schwerkraft . . . . . . . . . . . . . . . . . . . . . . .
1.4.6 Weitere Beispiele . . . . . . . . . . . . . . . . . . . . . .
1.4.7 Transformationsverhalten des Impulssatzes . . . . . . . .
1.5 Der Energiesatz . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Herleitung des Energiesatzes . . . . . . . . . . . . . . . .
1.5.2 Konservative Kräfte . . . . . . . . . . . . . . . . . . . .
1.5.3 Anwendungen . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Lineare Schwingungen mit einem Freiheitsgrad . . . . . . . . . .
1.6.1 Freie ungedämpfte Schwingungen . . . . . . . . . . . . .
1.6.2 Freie Schwingungen mit Dämpfung . . . . . . . . . . . .
1.6.3 Erzwungene Schwingungen bei periodischer Erregerkraft
1.6.4 Erzwungene Schwingungen bei beliebiger Erregerkraft . .
1.7 Zentralbewegung . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7.1 Begriffe, allgemeine Eigenschaften . . . . . . . . . . . . .
1.7.2 Drehimpuls und Flächensatz . . . . . . . . . . . . . . . .
1.7.3 Die Differentialgleichung der Bahn . . . . . . . . . . . .
1.7.4 Kepler-Bewegung . . . . . . . . . . . . . . . . . . . . . .
1.7.5 Das Zweikörperproblem . . . . . . . . . . . . . . . . . .
2 Punktsysteme und starre Körper
2.1 Mechanik der Punktsysteme . . . . . . .
2.1.1 Eigenschaften von Punktsystemen
2.1.2 Impuls- und Drehimpulssatz . . .
2.1.3 Energiesatz . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
1
3
3
4
7
9
16
16
18
18
21
21
24
28
35
35
36
39
44
44
45
48
53
57
57
58
60
61
66
.
.
.
.
68
68
68
69
72
I
Inhaltsverzeichnis
2.2
Mechanik der starren Körper . . . . . . . . . . . . .
2.2.1 Die Begriffe “Körper” und “starrer Körper”
2.2.2 Kinematik starrer Körper . . . . . . . . . .
2.2.3 Dynamik starrer Körper . . . . . . . . . . .
2.2.4 Ebene Bewegung . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
75
75
77
83
90
3 Analytische Mechanik
96
3.1 Zwangsbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
3.1.1 Klassifikation von Zwangsbedingungen . . . . . . . . . . . . . 96
3.1.2 Generalisierte Koordinaten . . . . . . . . . . . . . . . . . . . . 97
3.2 Lagrangesche Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . 97
3.2.1 D’Alembertsches Prinzip, Prinzip der virtuellen Arbeit . . . . 97
3.2.2 Herleitung der Lagrangeschen Gleichungen . . . . . . . . . . . 99
3.2.3 Anwendungen der Lagrangeschen Gleichungen . . . . . . . . . 101
3.2.4 Erhaltungssätze . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3.2.5 Invarianz bezüglich Punkttransformationen . . . . . . . . . . . 108
3.3 Hamiltonsche Mechanik . . . . . . . . . . . . . . . . . . . . . . . . . 109
3.3.1 Hamiltonsche Gleichungen . . . . . . . . . . . . . . . . . . . . 109
3.3.2 Eigenschaften der Hamilton-Funktion . . . . . . . . . . . . . . 111
3.3.3 Anwendungen der Hamiltonschen Gleichungen . . . . . . . . . 112
3.3.4 Routhsches Verfahren . . . . . . . . . . . . . . . . . . . . . . . 115
3.3.5 Poisson-Klammern . . . . . . . . . . . . . . . . . . . . . . . . 117
3.3.6 Poisson-Klammern und Quantisierung . . . . . . . . . . . . . 121
3.3.7 Satz von Liouville . . . . . . . . . . . . . . . . . . . . . . . . . 122
3.4 Variationsprinzipien . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
3.4.1 Einführung in die Variationsrechnung . . . . . . . . . . . . . . 125
3.4.2 Hamiltonsches Prinzip . . . . . . . . . . . . . . . . . . . . . . 130
3.4.3 Prinzip der kleinsten Wirkung . . . . . . . . . . . . . . . . . . 133
3.4.4 Kanonische Transformationen . . . . . . . . . . . . . . . . . . 138
3.5 Hamilton-Jacobische Theorie . . . . . . . . . . . . . . . . . . . . . . . 144
3.5.1 Hamiltonsche Wirkungsfunktion und Hamilton-Jacobische Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
3.5.2 Verkürzte Wirkungsfunktion und verkürzte Hamilton-Jacobische
Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
3.5.3 Analogie zwischen klassischer Mechanik und geometrischer Optik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
3.5.4 Von der klassischen Mechanik zur Wellenmechanik . . . . . . . 151
4 Spezielle Relativitätstheorie
4.1 Grundlegende Begriffe . . . . . . . . . . . . . . . . .
4.2 Lorentz-Transformation . . . . . . . . . . . . . . . . .
4.3 Folgerungen aus der Lorentz-Transformation . . . . .
4.3.1 Lichtgeschwindigkeit als Grenzgeschwindigkeit
4.3.2 Relativität der Gleichzeitigkeit . . . . . . . . .
4.3.3 Zeitdilatation und Zwillingsparadoxon . . . .
II
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
155
155
157
161
161
161
161
Inhaltsverzeichnis
4.4
4.3.4 Längenkontraktion . . . . . . . . . . . . . . . . . . . . . .
4.3.5 Addition von Geschwindigkeiten . . . . . . . . . . . . . . .
4.3.6 Lichtkegel . . . . . . . . . . . . . . . . . . . . . . . . . . .
Impulssatz für einen Massenpunkt . . . . . . . . . . . . . . . . . .
4.4.1 Eigenzeit, Vierergeschwindigkeit und Viererbeschleunigung
4.4.2 Impuls, Kraft und Energie . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
163
164
165
166
166
168
III
Inhaltsverzeichnis
IV
Literatur zur Vorlesung
Mechanik:
• Goldstein Klassische Mechanik (AULA)
• Scheck Mechanik (Springer)
• Nolting Grundkurs Theoretische Physik. 4. Spezielle Relativitätstheorie, Thermodynamik (Vieweg)
• Becker/Bürger Kontinuumsmechanik (Teubner, vergriffen)
• Skripte Theoretische Mechanik 1 und Ergänzungen zur theoretischen Mechanik von Prof. Hutter
Zu mathematischen Fragen:
• Laugwitz Differential-Geometrie (Teubner)
• Blaschke Vorlesungen über Differential-Geometrie 1 (Springer)
und – wie so oft –
• Bronstein/Semendjajew Taschenbuch der Mathematik (Harri Deutsch)
Anmerkung:
Die Abschnitte 1.1–1.3 der Originalversion dieses Skriptes wurden verfasst von
Dr. Georg Bauer.
Die Erzeugung und Einbindung der CorelDraw-Versionen der Abbildungen in diesem
Skript sowie dessen neuer Satz im LATEX-Format scrreprt wurden durchgeführt von
Dr. Harald Ehrentraut.
V
1 Punktmechanik
1.1 Der Begriff des Massenpunktes
Unter einem Massenpunkt P verstehen wir ein Objekt, das – seinem Namen gemäß
– die folgenden Eigenschaften besitzt:
• Ein Massenpunkt besitzt eine Masse m, die durch eine positive, reelle Zahl angegeben werden kann. Die Masse eines Massenpunktes ist eine Konstante, also
unveränderlich. (Letztere Annahme wird in der Relativitätstheorie hinfällig.)
• Der Massenpunkt nimmt einen bestimmten Punkt im physikalischen Raum ein,
insbesondere hat er also keine räumliche Ausdehnung. Von einem wie auch immer festgelegten Ursprung zeigt ein Aufpunktvektor x auf diese Stelle, welcher
ein Element des dreidimensionalen Vektorraums über den reellen Zahlen IR3
(Euklidischer Punktraum) ist.
Man kann demnach den Massenpunkt P mit den ihn definierenden Eigenschaften
identifizieren:
P = (xP , mP ) mit xP ∈ IR3 , mP ∈ IR.
(1.1)
Oft läßt man die Indizierung mit P weg und spricht einfach vom Ort x und der
Masse m, sofern im Zusammenhang klar ist, daß man jeweils von einem bestimmten
Massenpunkt spricht. Der Massenpunkt ist die einfachste Beschreibung eines realen
Körpers, die überhaupt noch Sinn macht, also genügend Information enthält, um
zu relevanten Aussagen zu gelangen. Für viele Problemstellungen ist dieses einfache
Modell bereits ausreichend. So lassen sich beispielsweise grundsätzliche Fragen zum
schiefen Wurf gut beantworten ohne die Kenntnis von geometrischen Eigenschaften des geworfenen Körpers, seiner genauen Massenverteilung usw. Natürlich ist die
Grenze, jenseits derer die Reduzierung des betrachteten Körpers auf einen Massenpunkt zu grob ist, fließend und hängt immer auch von der genauen Fragestellung
ab. In diesem Kapitel nehmen wir an, daß das betrachtete Objekt als Massenpunkt
hinreichend gut beschrieben wird.
1.2 Koordinaten- und Bezugssysteme
Befindet sich ein Massenpunkt an einer bestimmten Stelle im Ortsraum, so stellen
zwei verschiedene Betrachter, die sich auf einen gemeinsamen Ursprung einigen konnten, fest, daß sie beide denselben Ortsvektor x des Massenpunktes beobachten. Eine
1
1 Punktmechanik
andere Frage ist jedoch, wie sie die drei Komponenten dieses Vektors beschreiben.
Letztere sind jeweils auf ein entsprechendes Koordinatensystem bezogen, das dafür
sorgt, daß jedem Punkt im physikalischen Raum auch tatsächlich ein eineindeutiges
Tripel reeller Zahlen entspricht.
Zu jedem Koordinatensystem gehören Koordinatenlinien, welche dadurch entstehen,
daß alle Koordinaten bis auf eine konstant gehalten werden. Die freie Koordinate
parameterisiert dann eine eindimensionale Mannigfaltigkeit innerhalb des IR3 , die zu
dieser Koordinate gehörende Koordinatenlinie. Sind alle Koordinatenlinien Geraden,
spricht man von geradlinigen Koordinaten, ansonsten von krummlinigen Koordinaten.
Ein wichtiger Spezialfall geradliniger Koordinatensysteme sind die kartesischen Koordinatensysteme. Sie zeichnen sich dadurch aus, daß sie von einem Satz orthonormaler Basisvektoren e1 , e2 , e3 aufgespannt werden, so daß die Koordinatenlinien
Geraden sind und sich in rechten Winkeln schneiden. Die Orthonormalität läßt sich
mit Hilfe des Kronecker-Deltas δij , definiert gemäß
(
δij :=
1, für i = j,
0, für i 6= j,
schreiben als
ei · ej = δij .
(1.2)
Ein beliebiger Vektor x kann eindeutig als Linearkombination der orthonormalen
Basisvektoren dargestellt werden,
x = x1 e1 + x2 e2 + x3 e3 .
(1.3)
Die hierbei auftretenden Koeffizienten (x1 , x2 , x3 ) sind die kartesischen Koordinaten
des Vektors x bezüglich der Basis e1 , e2 , e3 . Zwei verschiedene kartesische Koordinatensysteme können sich maximal durch eine Translation des Ursprungs, eine
Rotation der Basisvektoren und eine Inversion der Orientierung (Rechtssystem ↔
Linkssystem) voneinander unterscheiden.
Ein Koordinatensystem ist also eine Vorschrift, wie ein Vektor durch Angabe von
drei Komponenten (im Falle des IR3 ) beschrieben werden kann, und somit ein rein
mathematischer Begriff. Im Gegensatz dazu ist ein Bezugssystem der Standpunkt
eines bestimmten Beobachters, von dem aus er/sie physikalische Größen mißt. Beispielsweise wird die Bestimmung des Geschwindigkeitsvektors eines Flugzeuges unterschiedliche Werte ergeben, je nachdem, ob die Messung von einem ruhenden Beobachter oder aus einem fahrenden Zug vorgenommen wird. Hierbei handelt es sich
um ein physikalisches Phänomen, welches nichts mit der unterschiedlichen Beschreibung ein und desselben Vektors in verschiedenen Koordinatensystemen zu tun hat,
sondern tatsächlich zwei verschiedene Vektoren liefert.
Es ist also wichtig, zwischen den beiden Begriffen “Koordinatensystem” und “Bezugssystem” klar zu unterscheiden. Allerdings wird man in aller Regel zur Beschrei-
2
1.3 Die Bahn eines Massenpunktes
bung von Vektoren in einem bestimmten Bezugssystem ein Koordinatensystem verwenden, das mit dem Bezugssystem verhaftet ist, in anderen Worten also der Bewegung des Bezugssystems folgt. Ein auf der Erdoberfläche ruhender Beobachter wird
natürlicherweise eine mit der Erdoberfläche verbundene Basis für ein kartesisches
Koordinatensystem wählen, ein Beobachter im fahrenden Zug dagegen eine mit dem
fahrenden Zug verbundene Basis. Häufig wird eine solche Verknüpfung implizit unterstellt und die Begriffe Koordinatensystem und Bezugssystem synonym verwendet.
Solange man sich im Prinzip über den Unterschied im klaren ist, ist das akzeptabel,
andernfalls kann diese Begriffsverwirrung jedoch zu schwer ausräumbaren Verständnisschwierigkeiten führen.
1.3 Die Bahn eines Massenpunktes
1.3.1 Bahn, Geschwindigkeit und Beschleunigung
Im allgemeinen wird ein Massenpunkt nicht zu allen Zeiten denselben Punkt im
Raum einnehmen, sondern sich bewegen. In diesem Abschnitt beschäftigen wir uns
mit der rein geometrischen Beschreibung solcher Bewegungen, zunächst ohne nach
deren Ursache zu fragen. Das bezeichnet man als Kinematik.
Der Ortsvektor x eines Massenpunktes sei also von der Zeit t abhängig:
x = x(t).
(1.4)
Da es wenig sinnvoll ist, daß ein Massenpunkt sich in einer unendlich kurzen Zeit
ein endliches Stück durch den Raum bewegen kann, muß die vektorwertige Funktion
x(t) eine stetige Funktion der Zeit t sein, welche die Bahn (oder synonym Trajektorie) des Massenpunktes im Raum beschreibt. Die Zeit t spielt dabei die Rolle des
Bahnparameters.
Durch die zeitliche Ableitung der Funktion x(t) erhält man die Geschwindigkeit v
des Massenpunktes:
v = v(t) =
d
x(t) = ẋ(t).
dt
(1.5)
Der Vektor der Geschwindigkeit ist durch seine Definition jeweils tangential zur
Bahn. Nochmalige Differentiation führt auf die Beschleunigung a:
a = a(t) =
d2
d
v(t) = v̇(t) = 2 x(t) = ẍ(t).
dt
dt
(1.6)
Legt man ein festes kartesisches Koordinatensystem zugrunde, übertragen sich die
Ableitungen auf die Komponenten von x:
x = x1 e1 + x2 e2 + x3 e3 =
3
X
xi e i = xi e i ,
(1.7)
i=1
ẋ =
3
X
ẋi ei = ẋi ei ,
(1.8)
i=1
3
1 Punktmechanik
ẍ =
3
X
ẍi ei = ẍi ei .
(1.9)
i=1
Der jeweils letzte Term in den drei Zeilen verwendet die Einsteinsche Summenkonvention, nach der über doppelt auftretende Indizes automatisch zu summieren ist.
Prinzipiell gilt, daß die Ableitung eines Vektors nach einem skalaren Parameter
wiederum einen Vektor erzeugt, der jedoch im allgemeinen nicht parallel zum Ausgangsvektor ist. Die Geschwindigkeit wird also im Normalfall nicht parallel zum
Ortsvektor und die Beschleunigung nicht parallel zum Geschwindigkeitsvektor sein.
1.3.2 Die Bogenlänge als Bahnparameter
Wir haben oben die Zeit zur Parameterisierung der Bahn eines Massenpunktes verwendet. Dies ist immer dann angebracht, wenn man tatsächlich am zeitlichen Verlauf
der Bewegung des Massenpunktes interessiert ist. Wenn dagegen nur die Bahn als
Kurve im Raum interessiert, ist es oft günstiger, eine Parameterisierung zu verwenden, die unabhängig davon ist, wie schnell sich der Massenpunkt bewegt. Hier bietet
sich als Parameter die Strecke s an, die der Massenpunkt auf der Bahn zurückgelegt hat (“Bogenlänge”). Definitionsgemäß erhalten wir den zurückgelegten Weg
als Integral der Geschwindigkeit über der Zeit. Da wir nicht den Vektor erhalten
wollen, der vom Startpunkt der Betrachtung auf den Zielpunkt zeigt, sondern den
skalaren Gesamtbetrag des durchlaufenen Weges zwischen diesen Punkten mit allen
“Umwegen”, müssen wir den Betrag der Geschwindigkeit aufintegrieren,
s = s(t) =
Z t
t0
|v(t̃)| dt̃,
(1.10)
um die gewünschte Bogenlänge s zu erhalten. Umgekehrt liefert Differentiation von
(1.10) die Aussage, daß die Zeitableitung der Bogenlänge mit dem Betrag der Geschwindigkeit gleich ist, wie es einem die Anschauung auch ohne formale Ableitung
sagt:
q
ṡ(t) = |v(t)| =
ẋ21 + ẋ22 + ẋ23 .
(1.11)
Solange die Geschwindigkeit v nicht verschwindet, existiert also eine eineindeutige
Zuordnung zwischen Zeit t und Bogenlänge s, und man kann den einen durch den
anderen Parameter ausdrücken:
s = s(t) und t = t(s) (sofern |v| 6= 0).
(1.12)
Alle Funktionen der Zeit lassen sich also wahlweise auch als Funktionen der Bogenlänge schreiben und umgekehrt. So gilt beispielsweise für den Vektor der Geschwindigkeit mit der Kettenregel der Differentiation
dx(t(s)) ds
dx(t)
=
= ṡ et
v=
dt
ds
dt
4
Ã
dx
et =
ds
!
.
(1.13)
1.3 Die Bahn eines Massenpunktes
Dabei ist et der Tangenteneinheitsvektor der Bahnkurve an der Stelle s. Die Tangenteneigenschaft ist klar, da das Weginkrement dx natürlich tangential zur Bahn
liegt. Die Normierung auf die Länge Eins ergibt sich aus Gln. (1.11) und (1.13):
v
v
et = =
⇒ |et | = 1.
(1.14)
ṡ
|v|
Differentiation von Gl. (1.13) nach der Zeit ergibt die Beschleunigung als Funktion
der Bogenlänge,
d
(ṡ et ) = s̈ et + ṡ ėt .
(1.15)
dt
Der erste Anteil s̈ et ist die Beschleunigung entlang der Bahn. Bei dem zweiten Term
ist nicht ganz so offensichtlich, worum es sich handelt. Die Rechnung
a=
et · et = 1
µ
¶
d
d
et · et = 2et · ėt = (1) = 0
⇒
dt
dt
⇒ ėt · et = 0
(1.16)
zeigt, daß ėt senkrecht auf et steht. Anschaulich liegt das daran, daß sich ein Vektor
konstanter Länge (nämlich Eins) nur senkrecht zu seiner Richtung ändern kann.
Weiterhin ist klar, daß ėt im Fall einer geraden Bahn verschwindet, da dann et
überall auf der Bahn in dieselbe Richtung zeigt. ėt hat also etwas mit der lokalen
Krümmung der durchlaufenen Bahn zu tun. Durch Normierung auf Eins erhält man
somit den senkrecht zu et stehenden Normaleneinheitsvektor en , der in der Ebene
der momentanen Bahnkrümmung liegt:
en =
ėt
.
|ėt |
(1.17)
Der Ausdruck (1.15) für die Beschleunigung läßt sich damit schreiben als
a = s̈ et + ṡ |ėt | en .
(1.18)
Dabei gilt für |ėt | nach der Kettenregel
¯
¯
¯
¯
¯ de ds ¯
¯ de ¯
ṡ
¯ t
¯
¯ t¯
|ėt | = ¯
¯ = ṡ ¯
¯= ,
¯ ds dt ¯
¯ ds ¯
ρ
(1.19)
wobei der Krümmungsradius ρ an der Stelle s gemäß
¯
¯
1 ¯¯ det ¯¯
=¯
¯
ρ ¯ ds ¯
(1.20)
eingeführt wurde. (Zuweilen arbeitet man auch mit der Krümmung κ = 1/ρ.) Einsetzen von Gl. (1.19) in die Beziehung (1.18) ergibt schließlich für die Beschleunigung
das Ergebnis
a = s̈ et +
ṡ2
en .
ρ
(1.21)
5
1 Punktmechanik
Der erste Anteil s̈ et heißt Bahnbeschleunigung, der zweite (ṡ2 /ρ) en Radialbeschleunigung.
Nachzutragen ist noch die Rechtfertigung, die in Gl. (1.20) definierte Größe ρ als
Krümmungsradius zu bezeichnen. Dazu betrachten wir gemäß Abbildung 1.1 eine
gekrümmte Bahn, deren Verlauf in der Umgebung der Stelle s durch einen Kreis mit
Radius ρ approximiert wird. Es gelten die Beziehungen
¯
ds = ρ dϕ,
|det | = dϕ
⇒
¯
|det | ¯¯ det ¯¯ 1
¯= ,
= ¯¯
ds
ds ¯ ρ
(1.22)
was genau Gl. (1.20) entspricht. Der Krümmungsradius ρ an einer bestimmten Stelle
s einer Bahn entspricht also dem Radius eines an die Kurve angeschmiegten Kreises,
wodurch sich die Bezeichnung Krümmungsradius erklärt.
Abbildung 1.1: Der Krümmungsradius einer Bahnkurve.
Zu Gleichung (1.20) ist noch anzumerken, daß zur Bestimmung des Krümmungsradius nicht notwendigerweise die Bogenlängendarstellung des Tangentenvektors benötigt
wird. Es gilt nämlich auch
1
|a × v|
=
.
ρ
|v|3
(1.23)
Zum Beweis dieser Beziehung berechnen wir a × v mit Hilfe von (1.13) und (1.21):
a × v = s̈ et × ṡ et +
⇒ |a × v| =
⇒
6
|v|3
|v|3
|en × et | =
ρ
ρ
|a × v|
1
= ,
3
|v|
ρ
was zu zeigen war.
ṡ2
ṡ3
|v|3
en × ṡ et =
en × et =
en × et
ρ
ρ
ρ
1.3 Die Bahn eines Massenpunktes
1.3.3 Begleitendes Dreibein, Matrix von Frenet
Mit den beiden bislang eingeführten Einheitsvektoren et (Tangentenvektor) und en
(Normalenvektor) läßt sich über das Kreuzprodukt ein dritter Einheitsvektor em
definieren,
em = et × en ,
(1.24)
der als Binormalenvektor bezeichnet wird. Er steht somit senkrecht auf der Ebene der
momentanen Bahnkrümmung, welche ja von et und en aufgespannt wird (auch als
Schmiegeebene bekannt). et , en und em bilden zusammen eine Orthonormalbasis des
IR3 , die begleitendes Dreibein genannt wird und sich jeweils der gegebenen Bahnkurve
anpaßt, in anderen Worten also der Bewegung des Massenpunktes folgt.
Es ist klar, daß sich die Basisvektoren et , en und em des begleitendes Dreibeins
im allgemeinen im Verlauf einer Bahn ändern; man kann sie als Funktionen der
Bogenlänge s auffassen. Leitet man sie nach s ab und drückt dann diese Ableitungen
et 0 , en 0 und em 0 wiederum in der aktuellen Basis des begleitenden Dreibeins aus, so
erhält man den folgenden Zusammenhang:
et 0
et
0
en = F en ,
em 0
em
(1.25)
mit der Matrix von Frenet F, deren neun Komponenten wir nun bestimmen.
Die Ableitung des Tangentenvektors et haben wir bereits betrachtet. Für ihren Betrag gilt nach Gl. (1.20)
¯
¯
¯ de ¯
1
¯ t¯
|et | = ¯
¯= ,
¯ ds ¯
ρ
0
(1.26)
und ihre Richtung definiert nach Gl. (1.17) den Normalenvektor en ,
et 0
ėt
=
= en .
0
|et |
|ėt |
(1.27)
Damit ergibt sich die erste Zeile von Gl. (1.25) zu
et 0 = 0 et +
1
en + 0 em .
ρ
(1.28)
Als nächstes gehen wir den Binormalenvektor em an. Der Betrag seiner Änderung
mit der Bogenlänge definiert die Windung 1/τ , welche angibt, wie sehr sich die Bahn
aus ihrer lokalen Schmiegeebene in die dritte Dimension hinauswindet:
¯
¯
¯ ¯
¯ de ¯
¯1¯
¯ ¯ = ¯¯ m ¯¯ = |em 0 |.
¯ ¯
¯ ds ¯
τ
(1.29)
7
1 Punktmechanik
Die Betragsstriche auf der linken Seite sind notwendig, da die Windung im Gegensatz
zur Krümmung auch negativ sein kann; das Vorzeichen der Windung wird unten
festgelegt.
Ganz allgemein muß für em 0 gelten (dritte Zeile von (1.25)):
em 0 = F31 et + F32 en + F33 em .
(1.30)
Da die Änderung eines normierten Vektors senkrecht auf dem Vektor selbst steht [vgl.
(1.16)], ist F33 = 0. Eine weitere Gleichung erhalten wir, wenn wir das Skalarprodukt
(em · et ) = 0 nach der Bogenlänge ableiten und Gl. (1.28) verwenden:
0=
d(em · et )
1
= em 0 · et + em · et 0 = em 0 · et + em · en = F31 .
ds
ρ | {z }
(1.31)
=0
Damit ist in Gl. (1.30) nur der Koeffizient F32 ungleich Null, die Änderung von
em erfolgt also in Richtung des Normalenvektors en . Wegen Gl. (1.29) muß dann
|F32 | = |1/τ | sein, und das Vorzeichen für τ wird so gewählt, daß
em 0 = 0 et −
1
en + 0 em .
τ
(1.32)
Bis auf die mittlere Zeile ist die Matrix von Frenet jetzt bekannt. Für diese Zeile
nutzen wir aus, daß wir den Vektor en als Kreuzprodukt em × et schreiben können.
Differentiation dieses Kreuzprodukts nach s ergibt
en 0 = em 0 × et + em × et 0
1
1
= − en × et + em × en
τ
ρ
=
1
1
em − et
τ
ρ
1
1
= − et + 0 en + em .
ρ
τ
(1.33)
Die Matrix von Frenet ist nun vollständig bekannt:
1
ρ
0
et
et 0
1
0
en = F en =
0
−
ρ
0
em
em
1
0 −
τ
0
e
t
1
en .
τ e
m
0
(1.34)
Offenbar ist F schiefsymmetrisch. Die Notwendigkeit dieser Schiefsymmetrie sieht
man leicht durch folgende Rechnung ein:
∀i, j :
8
0 = (ei · ej )0 = ei 0 · ej + ei · ej 0 = Fij + Fji .
(1.35)
1.3 Die Bahn eines Massenpunktes
Ein etwas tiefer gehender Grund dafür ist, daß F eine infinitesimale Drehung erzeugt
in dem Sinne, daß die Matrix (1 + ds F) die infinitesimale Drehung des begleitenden
Dreibeins beschreibt, wenn man auf der Bahn von s nach s + ds voranschreitet:
et
et
et 0
et + det
0
(1 + ds F) en = en + ds en = en + den .
em
em
em 0
em + dem
(1.36)
Die Antisymmetrie von F folgt dann aus der Tatsache, daß ganz allgemein bei
Drehmatrizen (orthogonalen Matrizen) Transponierte und Inverse identisch sind:
(1 + ds F)T = (1 + ds F)−1
⇒ 1 + ds F T = 1 − ds F
⇒ F T = −F .
(1.37)
Ähnlich wie für die Krümmung 1/ρ [siehe Gleichung (1.23)] läßt sich auch für den
zweiten Parameter der Frenetschen Matrix, die Windung 1/τ , eine Gleichung angeben, die von der Bogenlängendarstellung unabhängig ist:
1
v · (a × ȧ)
=
.
τ
(v × a)2
(1.38)
Auf eine Herleitung dieser Gleichung soll hier verzichtet werden.
Zu den Frenetschen Formeln (1.34) ist anzumerken, daß sie ein System von neun
gekoppelten gewöhnlichen Differentialgleichungen für die Vektoren des begleitenden
Dreibeins darstellen. Gibt man also die Krümmung 1/ρ und die Windung 1/τ einer
Kurve als Funktion der Bogenlänge s sowie ein Startdreibein (et 0 , en 0 , em 0 ) vor, so
kann das begleitende Dreibein für alle Punkte der Raumkurve berechnet werden.
Die Raumkurve selbst ist dann auch vollständig bestimmt, denn man erhält sie aus
einer Integration des Tangentenvektors,
x(s) = x0 +
Z s
0
et (s̃) ds̃.
(1.39)
Diese Tatsache, daß also eine Raumkurve bei Vorgabe eines Anfangswertes vollständig
durch die zwei Parameter Krümmung und Windung längs der Bogenlänge beschrieben wird, ist die Aussage des Hauptsatzes der Kurventheorie.
Der Vollständigkeit halber soll noch erwähnt werden, daß man analog zur Schmiegeebene, die von den Vektoren et und en aufgespannt wird, auch noch eine Normalenebene (von en und em aufgespannt) und eine Rektifizierungsebene (von em und
et aufgespannt) definiert.
1.3.4 Anwendungen
Geradlinige Bewegung
Existiert zu keiner Zeit eine Beschleunigungskomponente senkrecht zur vorhandenen Geschwindigkeit eines Massenpunkts, so überstreicht er eine Gerade im Raum.
9
1 Punktmechanik
Formal kann man das anhand Gl. (1.23) einsehen:
akv
⇒
a×v =0
⇒
κ=
1
= 0.
ρ
(1.40)
Die Krümmung ist also längs der gesamten Bahn gleich Null (bzw. der Krümmungsradius unendlich), so daß die Bahn in der Tat eine Gerade sein muß. Wählt man
ein kartesisches Koordinatensystem so, daß der Ursprung mit dem Bahnpunkt s = 0
identifiziert wird und der Vektor e1 parallel zur Anfangsgeschwindigkeit zeigt, dann
gilt
x(t) = x1 (t) e1 = s(t) e1 ,
v(t) = ẋ1 (t) e1 = ṡ(t) e1 ,
a(t) = ẍ1 (t) e1 = s̈(t) e1 .
(1.41)
(1.42)
(1.43)
Der Tangentenvektor et = dx/ds ist demzufolge konstant und mit e1 identisch. Das
gesamte Problem ist räumlich eindimensional; man kann sich die Vektornotation
sparen und alle Gleichungen einfach skalar schreiben.
Abgesehen vom Tangentenvektor et ist es nicht möglich, die Basisvektoren des begleitenden Dreibeins eindeutig zu definieren. Es ist klar, daß der Normalenvektor en und
der Binormalenvektor em senkrecht auf et und senkrecht aufeinander stehen müssen,
aber aufgrund der verschwindenden Bahnkrümmung existiert keine Schmiegeebene,
welche die Richtung von en eindeutig bestimmt. Diese kann vielmehr willkürlich in
der Normalenebene (senkrecht zu et ) festgelegt werden, die Richtung von em folgt
dann über das Kreuzprodukt (1.24).
Bewegung auf einer Kreisbahn
Statt der Bogenlänge s bietet sich der überstrichene Winkel ϕ als Bahnparameter
an (siehe Abbildung 1.2), wobei
s(t) = r ϕ(t)
(1.44)
gilt.
Mit dem Winkel ϕ und dem festen Bahnradius r erhält man für den Ort x des
Massenpunktes
³
´
x(t) = r cos ϕ(t) e1 + sin ϕ(t) e2 = r er (t).
(1.45)
Die Basisvektoren er und eϕ sind
er (t) = cos ϕ(t) e1 + sin ϕ(t) e2 ,
eϕ (t) = − sin ϕ(t) e1 + cos ϕ(t) e2 ,
(1.46)
(1.47)
und ihre zeitlichen Ableitungen ergeben sich zu
ėr = ϕ̇ eϕ ,
ėϕ = −ϕ̇ er .
10
(1.48)
(1.49)
1.3 Die Bahn eines Massenpunktes
Abbildung 1.2: Die Geometrie einer Kreisbahn.
Die Vektoren des begleitenden Dreibeins sind demzufolge
et (t) = eϕ (t),
en (t) = −er (t),
em
= e3 .
(1.50)
Der Tangenten- und der Normalenvektor sind also zeitabhängig, der Binormalenvektor ist dagegen konstant und steht senkrecht auf der Bahnebene.
Nach Gln. (1.13) und (1.21) und mit ρ = r schreiben sich somit Geschwindigkeit v
und Beschleunigung a
v = ṡ et = rϕ̇ eϕ ,
ṡ2
a = s̈ et + en = rϕ̈ eϕ − rϕ̇2 er .
ρ
(1.51)
(1.52)
Die beiden Komponenten der Beschleunigung werden auch Azimutalbeschleunigung
(rϕ̈) und Radialbeschleunigung (−rϕ̇2 ) genannt. Erstere beschleunigt das Teilchen
tangential zur Kreisbahn, letztere zwingt es entgegen seiner Trägheit auf die Kreisbahn und wird auch Zentripetalbeschleunigung genannt. Die Zeitableitung des Winkels ϕ̇ heißt Winkelgeschwindigkeit oder Kreisfrequenz und erhält meist das Symbol
ω.
Der Sonderfall konstanter Winkelgeschwindigkeit Wir betrachten nun den Fall,
daß die Bewegung auf der Kreisbahn mit zeitlich konstanter Winkelgeschwindigkeit
ω = ω0 abläuft. Mit dem Anfangswinkel ϕ0 zur Zeit t = 0 beträgt der Winkel ϕ zur
Zeit t also
ϕ̇ = ω0
⇒
ϕ(t) = ω0 t + ϕ0 .
(1.53)
Damit und nach Gl. (1.45) ergibt sich der Ort des Massenpunktes zu
³
´
x(t) = r cos(ω0 t + ϕ0 ) e1 + sin(ω0 t + ϕ0 ) e2 .
(1.54)
11
1 Punktmechanik
Die dazugehörige Bogenlänge ist s = rω0 t + rϕ0 , und die Dauer eines Umlaufs
beträgt T = 2π/ω0 . Oft gibt man auch die Frequenz ν an, die dem Verhältnis [Anzahl
Umläufe/Zeit] entspricht:
ν=
1
ω0
=
.
T
2π
(1.55)
Die kartesischen Ortskoordinaten eines mit konstanter Winkelgeschwindigkeit auf
einer Kreisbahn befindlichen Massenpunkts führen nach Gl. (1.54) harmonische
Schwingungen durch,
x1 (t) = r cos(ω0 t + ϕ0 ),
x2 (t) = r sin(ω0 t + ϕ0 ).
(1.56)
Auch der zeitliche Verlauf der Geschwindigkeiten und Beschleunigungen ist harmonisch, da eine wiederholte Zeitableitung von Gl. (1.56) jeweils wieder Funktionen aus
dem Satz cos(ω0 t + ϕ0 ) und sin(ω0 t + ϕ0 ) liefert. Ganz allgemein spricht man immer
dann von harmonischen Prozessen, wenn ein periodischer sinusförmiger Zeitverlauf
vorliegt.
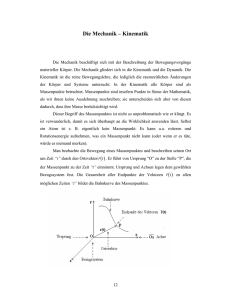
Allgemeine ebene Bewegung
Die Bewegung eines Massenpunktes heißt eben, wenn sich dieser während der gesamten betrachteten Zeit auf einer festen Ebene befindet. Verwendet man kartesische
Koordinaten zur Beschreibung, so kann man diese stets so legen, daß
∀t :
x3 = 0.
(1.57)
Es muß dann nur noch die x1 -x2 -Ebene betrachtet werden, und man erhält für den
Ortsvektor, die Geschwindigkeit und die Beschleunigung [vgl. Gln. (1.7), (1.8), (1.9)]
x = x1 e1 + x2 e2 ,
v = ẋ1 e1 + ẋ2 e2 ,
a = ẍ1 e1 + ẍ2 e2 .
(1.58)
(1.59)
(1.60)
Jedoch ist diese Darstellung nicht immer die günstigste. Bei vielen Problemen sind
ebene Polarkoordinaten (r, ϕ) geeigneter (Abstand r von einem Zentrum, Winkel
ϕ zwischen erstem kartesischen Basisvektor und Ortsvektor, siehe Abbildungen 1.2
und 1.3). Die Transformation von kartesischen auf Polarkoordinaten lautet
q
x21 + x22 ,
µ ¶
x2
ϕ = arctan
,
x1
r =
(1.61)
(1.62)
bzw. in die andere Richtung
x1 = r cos ϕ,
x2 = r sin ϕ.
12
(1.63)
(1.64)
1.3 Die Bahn eines Massenpunktes
Abbildung 1.3: Die gelochte Halbebene.
Die Transformationen (1.61) – (1.64) sind allerdings nur in der gelochten Halbebene
x1 ≥ 0 ∧ (x1 , x2 ) 6= (0, 0), bzw. −π/2 ≤ ϕ ≤ π/2 ∧ r 6= 0 (Abb. 1.3), eineindeutig.
Der Tatsache, daß der Arcustangens nicht unterscheiden kann, durch welche Kombination der Vorzeichen von x1 und x2 sich das Vorzeichen seines Arguments x2 /x1
ergibt, und er also in Abbildung 1.3 den ersten und den dritten bzw. den zweiten
und den vierten Quadranten nicht auseinanderhalten kann, kann man noch begegnen, indem man eine Fallunterscheidung in seine Definition einbaut, die für den
zweiten und dritten Quadranten π zum Ergebnis dazuaddiert. Im Ursprung liegt
jedoch eine echte Singularität vor, die darin besteht, daß der Winkel ϕ dort unbestimmt ist. Das kann Probleme bereiten, wenn eine in Polarkoordinaten beschriebene
ebene Bewegung durch den Ursprung geht.
Die zu r und ϕ gehörenden Basisvektoren er und eϕ wurden bei der Betrachtung
eines Massenpunktes auf einer Kreisbahn schon angegeben [Gln. (1.46), (1.47)]. Der
Unterschied ist lediglich, daß die Koordinate r hier eine Variable statt einer Konstanten ist. Auch die Beziehungen (1.48), (1.49) für die Zeitableitung der Basisvektoren
bleiben dieselben:
ėr = ϕ̇ eϕ ,
ėϕ = −ϕ̇ er .
(1.65)
(1.66)
Für die Darstellung von Ort x, Geschwindigkeit v und Beschleunigung a gilt somit
x = r er ,
v = ṙ er + r ėr
= |{z}
ṙ er + rϕ̇ eϕ ,
vr
|{z}
(1.67)
(1.68)
vϕ
a = r̈ er + 2ṙ ėr + r ër
13
1 Punktmechanik
= r̈ er + 2ṙϕ̇ eϕ + rϕ̈ eϕ − rϕ̇2 er
= (r̈ − rϕ̇2 ) er + (2ṙϕ̇ + rϕ̈) eϕ ,
|
{z
}
|
ar
{z
}
(1.69)
aϕ
und die Bogenlänge s ermittelt man über das Integral
s=
Z t
t0
|v(t̃)| dt̃ =
Z tq
t0
ṙ2 + (rϕ̇)2 dt̃.
(1.70)
Für den Spezialfall eines zeitlich konstanten Radius (ṙ = r̈ = 0) erhält man wieder
die Kreisbahn-Beziehungen (1.51), (1.52). Ist dagegen der Winkel ϕ konstant, so
ergibt sich eine geradlinige Bewegung.
Bewegung auf einer Kugeloberfläche
Zuweilen ist man auch mit dem Problem konfrontiert, die Bewegung eines Massenpunktes auf einer gekrümmten zweidimensionalen Mannigfaltigkeit im IR3 zu beschreiben. Ein Beispiel hierfür ist ein Eishockey-Puck auf einer sehr schlechten, gewellten Eisfläche (solange er nicht abhebt). Auch in einem solchen Fall kann man
ein geeignetes Koordinatensystem finden, in dem der Ort des Massenpunktes durch
nur zwei Parameter beschrieben wird; solche Koordinaten können allerdings sehr
kompliziert sein.
Ein wichtiger Spezialfall, den wir nun behandeln, ist die Bewegung eines Massenpunktes auf einer Kugeloberfläche (z. B. Erde). Geeignete Koordinaten für dieses
Problem sind die Kugelkoordinaten, welche durch den Radius r, den Längenwinkel
ϕ und den Breitenwinkel θ gebildet werden. Der Zusammenhang zwischen Kugelund kartesischen Koordinaten ist durch die folgenden Formeln gegeben (siehe auch
Abbildung 1.4):
x1 = r cos ϕ sin θ,
x2 = r sin ϕ sin θ,
x3 = r cos θ,
(1.71)
(1.72)
(1.73)
bzw.
q
r =
x21 + x22 + x23 ,
µ
ϕ = arctan
(1.74)
¶
x2
,
x1
q
(1.75)
x21 + x22
.
θ = arctan
x3
(1.76)
Ähnlich wie bei den ebenen Polarkoordinaten gibt es auch hier Singularitäten. Im
Ursprung sind beide Winkel ϕ und θ unbestimmt, auf der gesamten z-Achse der
14
1.3 Die Bahn eines Massenpunktes
Abbildung 1.4: Definition der Kugelkoordinaten r, ϕ und θ.
Längenwinkel ϕ. Auf einer gegebenen Kugeloberfläche (r = r0 = const > 0) verbleiben die beiden Pole der Kugeloberfläche als problematische Stellen mit unbestimmtem ϕ.
Die Basisvektoren der Kugelkoordinaten schreiben sich in der kartesischen Basis wie
folgt,
er
eϕ
(1.77)
− sin ϕ
= cos ϕ
,
0
eθ
cos ϕ sin θ
= sin ϕ sin θ ,
cos θ
(1.78)
cos ϕ cos θ
= sin ϕ cos θ ,
− sin θ
(1.79)
und durch Ausdifferenzieren (Übung) ergeben sich deren Zeitableitungen zu
ėr = ϕ̇ sin θ eϕ + θ̇ eθ ,
ėϕ = −ϕ̇ sin θ er − ϕ̇ cos θ eθ ,
ėθ = −θ̇ er + ϕ̇ cos θ eϕ .
(1.80)
Hierbei ist zu beachten, daß die Aufzählung in der Reihenfolge r, ϕ, θ zwar der
Gewohnheit entspricht, die orthonormierte rechtshändige Basis aber aus der Folge
er , eθ und eϕ besteht. Mit dem Ortsvektor
x = r er
(1.81)
erhält man durch Zeitableitung die allgemeinen Ausdrücke für die Geschwindigkeit
v und die Beschleunigung a in Kugelkoordinaten,
v = ṙ er + r ėr
= ṙ er + rϕ̇ sin θ eϕ + rθ̇ eθ ,
(1.82)
15
1 Punktmechanik
sowie
a = r̈ er + 2ṙ ėr + r ër
= r̈ er + 2ṙ (ϕ̇ sin θ eϕ + θ̇ eθ ) + r (ϕ̇ sin θ eϕ + θ̇ eθ )·
= r̈ er + 2ṙϕ̇ sin θ eϕ + 2ṙθ̇ eθ
+rϕ̈ sin θ eϕ + rϕ̇θ̇ cos θ eϕ + rϕ̇ sin θ ėϕ + rθ̈ eθ + rθ̇ ėθ
= r̈ er + (2ṙϕ̇ sin θ + rϕ̈ sin θ + rϕ̇θ̇ cos θ) eϕ + (2ṙθ̇ + rθ̈) eθ
−rϕ̇ sin θ (ϕ̇ sin θ er + ϕ̇ cos θ eθ ) + rθ̇ (−θ̇ er + ϕ̇ cos θ eϕ )
= (r̈ − rθ̇2 − rϕ̇2 sin2 θ) er
+(2ṙϕ̇ sin θ + rϕ̈ sin θ + 2rϕ̇θ̇ cos θ) eϕ
+(2ṙθ̇ + rθ̈ − rϕ̇2 sin θ cos θ) eθ .
(1.83)
Die allgemeine Beschreibung der Bewegung auf einer Kugeloberfläche folgt hieraus
durch Ausnutzen von r = r0 = const ⇒ ṙ = r̈ = 0:
v = r (ϕ̇ sin θ eϕ + θ̇ eθ ),
(1.84)
µ
¶
2
2
2
2
a = r −(θ̇ +ϕ̇ sin θ) er +(ϕ̈ sin θ+2ϕ̇θ̇ cos θ) eϕ +(θ̈−ϕ̇ sin θ cos θ) eθ .(1.85)
Für die Bogenlänge s ergibt sich in diesem Fall
s(t) =
Z t
t0
|v(t̃)| dt̃ =
Z t q
t0
r ϕ̇2 sin2 θ + θ̇2 dt̃.
(1.86)
Das Resultat (1.84) für die Geschwindigkeit zeigt, daß diese keine Radialkomponente
hat, was ja auch klar ist, denn die Bewegung verläuft nach Voraussetzung tangential
zur Kugeloberfläche. Dagegen existiert im allgemeinen eine Radialkomponente der
Beschleunigung [Gl. (1.85)], welche stets auf den Kugelmittelpunkt weist und dafür
sorgt, daß der Massenpunkt nicht von der Kugeloberfläche abhebt [entsprechend der
Radialbeschleunigung bei der Kreisbahnbewegung, vgl. Diskussion der Gl. (1.52)].
1.4 Der Impulssatz
Nach der rein geometrischen Beschreibung des letzten Abschnitts wenden wir uns
nun der Frage zu, wodurch die Bewegung eines Massenpunktes, bzw. im Vorgriff auf
Kapitel 2 eines Systems von Massenpunkten, tatsächlich verursacht wird (“Dynamik”). Dazu klären wir zuerst die zentralen Begriffe.
1.4.1 Die Begriffe “Impuls” und “Kraft”
Wir betrachten eine Menge von Massenpunkten {Pi , i = 1 . . . n}, die das System bilden, um dessen Bewegung es uns geht. Unter dem Impuls pi eines einzelnen solchen
16
1.4 Der Impulssatz
Massenpunktes Pi versteht man das Produkt seiner Masse mi mit seiner Geschwindigkeit v i ,
pi = mi v i .
(1.87)
Wir fordern, daß Masse und Impuls additive Größen sind, so daß für die Gesamtmasse M und den Gesamtimpuls P des Systems von Massenpunkten gilt:
M =
P =
n
X
i=1
n
X
mi ,
pi =
i=1
(1.88)
n
X
mi v i .
(1.89)
i=1
Des weiteren definiert man den Massenmittelpunkt xcm (“centre of mass”) des Systems als das gewichtete Mittel der Ortsvektoren der einzelnen Massenpunkte,
xcm
n
1 X
=
mi xi ,
M i=1
(1.90)
und die Massenmittelpunktsgeschwindigkeit v cm als
v cm =
n
dxcm
1 X
=
mi v i .
dt
M i=1
(1.91)
Da die Summe rechts gerade dem Gesamtimpuls P entspricht, kann man diesen
analog dem Impuls eines einzelnen Massenpunktes schreiben als
P = M v cm .
(1.92)
Mit der Vokabel “Bewegungszustand eines Massenpunktes” identifizieren wir fortan
seinen Impuls. Weiterhin verstehen wir unter der Kraft F i auf den Massenpunkt Pi
eine von außerhalb auf diesen einwirkende Größe, die dafür verantwortlich ist, daß
sich sein Bewegungszustand ändert. Wir fordern die folgenden Eigenschaften:
• Kräfte lassen sich als dreidimensionale Vektoren darstellen.
• Wirken auf einen Massenpunkt mehrere Kräfte gleichzeitig, so lassen sich diese
vektoriell addieren zu einer Gesamtkraft, die die Einwirkung auf den Massenpunkt vollständig beschreibt. Oft formuliert man dies zuerst als ParallelogrammAxiom für zwei Kräfte (siehe Abbildung 1.5) und folgert dann den entsprechenden Zusammenhang für beliebig viele Kräfte mittels vollständiger Induktion.
Bei der Addition von Kräften, die auf einen ausgedehnten Körper wirken, muß
zusätzlich der Angriffspunkt der Einzelkräfte berücksichtigt werden. Darauf kommen wir in Kapitel 2 zurück.
17
1 Punktmechanik
Abbildung 1.5: Zum Parallelogramm-Axiom
1.4.2 Die Newtonschen Gesetze
Die Newtonschen Gesetze sind keine Gesetze im dem Sinne, daß man sie aus anderen
Tatsachen ableiten könnte, sondern der Mechanik zugrundegelegte fundamentale
Erfahrungstatsachen; sie sollten daher eigentlich als Axiome bezeichnet werden. Sie
lauten wie folgt:
Erstes Newtonsches Gesetz: die Trägheit
Jeder Körper verharrt in seinem Zustand der Ruhe oder der gleichförmigen, geradlinigen Bewegung, wenn er nicht durch einwirkende Kräfte
gezwungen wird, seinen Bewegungszustand zu ändern.
Zweites Newtonsches Gesetz: Impuls und Kraft
Die Änderung der Bewegung ist der Einwirkung der bewegenden Kraft
proportional und geschieht nach der Richtung derjenigen geraden Linie,
nach welcher jene Kraft wirkt.
Drittes Newtonsches Gesetz: actio = reactio
Die Wirkung ist stets der Gegenwirkung gleich; oder: die Wirkungen
zweier Körper aufeinander sind stets gleich und von entgegengesetzer
Richtung.
Die Gültigkeit des ersten und zweiten Newtonschen Gesetzes ist allerdings auf eine
bestimmte Klasse von Bezugssystemen beschränkt, die als Inertialsysteme bezeichnet
werden. Unter einem Inertialsystem versteht man ein Bezugssystem, das entweder
ruht oder sich geradlinig und gleichförmig bewegt, jedoch keiner Beschleunigung unterliegt. Wir werden uns daher zunächst auf die Beschreibung von Bewegungen von
Inertialsystemen aus beschränken. Die Verallgemeinerung auf beschleunigte Bezugssysteme wird später behandelt.
1.4.3 Mathematische Formulierung
Die obigen Formulierungen der Newtonschen Axiome sind noch vergleichsweise vage
und müssen im folgenden präzisiert werden.
Mit den mathematischen Begriffen des Impulses und der Kraft läßt sich das zentrale,
zweite Newtonsche Gesetz auch in der folgenden Weise formulieren:
18
1.4 Der Impulssatz
Die Kraft ist gleich der zeitlichen Änderung des Impulses.
In Formeln ausgedrückt bedeutet das für einen Massenpunkt (Zählindex i hier weggelassen):
F =
dp
.
dt
(1.93)
Das erste Newtonsche Gesetz ist hierin als Spezialfall enthalten: Bei verschwindender
Kraft F ist der Impuls p zeitlich konstant.
Gleichung (1.93) kann als Bilanzgleichung für den Impuls definiert werden: Der Impuls eines Massenpunktes ist eine Erhaltungsgröße; er kann sich nur ändern, wenn er
dem Massenpunkt von außerhalb in Form einer Kraft zugeführt wird. Man spricht
daher auch von dem Impulssatz.
Da wir die Masse eines Massenpunktes als konstant ansehen (nichtrelativistischer
Grenzfall), kann man sie aus der Zeitableitung in Gl. (1.93) herausziehen, es verbleibt
dann
F =
d(mv)
= ma,
dt
(1.94)
oder in Worten ausgedrückt: Kraft ist gleich Masse mal Beschleunigung.
Ist die Kraft F als Funktion der Zeit, des Ortes, der Geschwindigkeit oder Kombinationen dieser Größen bekannt, führt Gl. (1.94) auf eine Differentialgleichung zweiter
Ordnung für x(t), welche als Bewegungsgleichung bezeichnet wird. Diese kann bei
gegebenen Anfangswerten für den Ort und die Geschwindigkeit des Massenpunktes
zu einer bestimmten Zeit t0 im Prinzip integriert werden; die praktische Durchführbarkeit hängt von der speziellen Form des Kraftgesetzes ab. Häufig ist nur eine
numerische Integration mit dem Computer möglich.
Wir kommen nun zur mathematischen Formulierung des dritten Newtonschen Gesetzes. Dieses betrifft die Wechselwirkungskraft zwischen zwei Massenpunkten Pi und
Pj und läßt sich wie folgt in Formeln ausdrücken:
Wenn F ij die Kraft ist, die der Massenpunkt Pj auf den Punkt Pi ausübt,
weiterhin F ji die Kraft von Pi auf Pj ist, dann gilt
F ij = −F ji .
Dieser Zusammenhang heißt auch Reaktionsprinzip.
Weiterhin gilt in aller Regel (z. B. Gravitation, elektrostatische Kraft zwischen
Punktladungen), daß die Richtung der Wechselwirkungskraft F ij bzw. F ji parallel zum Verbindungsvektor xi − xj zwischen den beiden Punkten verläuft. Wenn
nicht ausdrücklich anders erwähnt, werden wir stets auch diese Aussage als richtig
19
1 Punktmechanik
voraussetzen, sie ist jedoch nicht allgemeingültig. Eine wichtige Ausnahme ist die
elektromagnetische Kraft (Lorentz-Kraft) zwischen bewegten Ladungen.
Das zweite Newtonsche Gesetz (welches im Übrigen oft einfach als “Newtonsches
Gesetz” bezeichnet wird) für einen Massenpunkt Pi innerhalb eines Punktsystems
lautet entsprechend zu Gl. (1.93)
Fi =
dpi
.
dt
(1.95)
Es ist häufig sinnvoll, die Kraft F i aufzuteilen in eine äußere Kraft F ext
i , welche von
außerhalb des Punktsystems auf Pi einwirkt, und die Wechselwirkungskräfte F ij mit
den anderen Massenpunkten j = 1 . . . n, j 6= i (ein Massenpunkt kann nicht mit sich
selbst wechselwirken), des Systems. Damit schreibt sich das Newtonsche Gesetz für
Pi als
n
X
F ij + F ext
=
i
j=1
j6=i
dpi
.
dt
(1.96)
Durch Summation über alle Massenpunkte folgt daraus das Newtonsche Gesetz für
das gesamte Punktsystem:
n X
n
X
i=1
F ij +
n
X
i=1
j=1
j6=i
F ext
i
=
n
X
dpi
i=1
dt
P
=
d(
i
dt
pi )
=
dP
.
dt
(1.97)
Aufgrund des dritten Newtonschen Gesetzes (Reaktionsprinzip) verschwindet die
Doppelsumme über die Wechselwirkungskräfte:
n X
n
X
i=1
F ij = F 12 + F 21 + F 13 + F 31 + F 23 + F 32 + . . . = 0.
(1.98)
j=1
j6=i
Faßt man weiterhin die Summe der äußeren Kräfte auf die einzelnen Massenpunkte
zu einer gesamten äußeren Kraft F ext auf das Punktsystem zusammen, dann verbleibt
F ext =
dP
,
dt
(1.99)
bzw. unter Verwendung von Gl. (1.92) und der Konstanz der Masse
F ext = M acm .
(1.100)
Die Bewegung des Massenmittelpunkts eines Systems von Massenpunkten gehorcht
also einem Gesetz, das dem für einen einzelnen Massenpunkt gleicht, der die Masse
M besitzt und an dem die Kraft F ext angreift. Die Wechselwirkungskräfte (inneren
Kräfte) zwischen den Massenpunkten des Systems tragen offensichtlich nichts zur
Bewegung des Massenmittelpunkts bei.
Die Aufteilung des Universums in das betrachtete System und dessen Äußeres (die
Umgebung) ist willkürlich und hängt vom jeweils gestellten Problem ab. Betrachtet
20
1.4 Der Impulssatz
man etwa die Erde als Ein-Massenpunkt-System, so ist die Gravitationskraft der
Sonne auf die Erde eine äußere Kraft, die den Bewegungszustand der Erde ändert.
Nimmt man dagegen das gesamte Sonnensystem als System von Massenpunkten,
ist dieselbe Kraft eine innere Kraft, welche keine Auswirkung auf den Bewegungszustand des Massenzentrums (Massenmittelpunktes) des Sonnensystems hat. Die
geschickte Wahl des Systems, dessen Veränderung betrachtet wird, und seiner Umgebung, die mittels äußerer Kräfte darauf einwirkt, ist eine wichtige Voraussetzung,
Problemstellungen überhaupt erst handhabbar zu machen.
1.4.4 Zur Trägheit
Es wurde bereits festgestellt, daß das erste Newtonsche Gesetz eigentlich ein Spezialfall des zweiten für verschwindende Kraft F ist. Wir werden diese Aussage nun etwas
weiter verfolgen, indem wir die Bewegungsgleichung (1.94) für diesen Fall explizit
lösen.
Gegeben sei also ein Massenpunkt der Masse m, auf welchen keine Kraft wirkt.
Weiterhin soll er sich zur Zeit t = 0 am Ort x0 befinden und die Geschwindigkeit v 0
haben. Aus Gl. (1.94) folgt dann
ẍ(t) = 0,
ẋ(t) = v 0 +
x(t) = x0 +
Z t
0
Z t
0
(1.101)
ẍ(t̃) dt̃ = v 0 ,
(1.102)
ẋ(t̃) dt̃ = x0 + v 0 t.
(1.103)
Ohne Einfluß von Kräften bewegt sich ein Massenpunkt also entweder gar nicht
(wenn v 0 = 0 gilt) oder gleichförmig auf gerader Bahn, wie es die verbale Formulierung des Trägheitsgesetzes ja auch verlangt.
1.4.5 Die Schwerkraft
Ein etwas weniger triviales Problem ist das einer konstanten Kraft auf einen Massenpunkt. Eine solche wirkt zum Beispiel in guter Näherung auf einen Körper, der
sich im Erdschwerefeld befindet, solange die relevanten Distanzen klein im Vergleich
zum Erdradius sind. Es gilt dann, daß ein Körper der Masse m die Gewichtskraft
G = mg erfährt, die zum Erdmittelpunkt gerichtet ist; die Konstante g ist die
Schwerebeschleunigung. Aufgrund der Proportionalität der Gewichtskraft zur Masse
m kürzt sich diese in der Bewegungsgleichung heraus,
mẍ = mg
⇒
ẍ = g;
(1.104)
man erhält eine von der Masse unabhängige Differentialgleichung für die allgemeine
Bewegung eines Massenpunktes im homogenen Schwerefeld. Das hat unter anderem
zur Folge, daß bei Ausschaltung störender Einflüsse wie dem Luftwiderstand alle
Körper gleich schnell fallen.
Diese Tatsache ist nicht so trivial, wie es auf den ersten Blick erscheinen mag. Der
tiefere Grund dafür ist die Äquivalenz von träger Masse [Widerstand eines Körpers
21
1 Punktmechanik
gegen eine einwirkende Kraft, m auf der linken Seite von (1.104)1 ] und schwerer
Masse [bestimmt das Gewicht eines Körpers im Gravitationsfeld, m auf der rechten
Seite von (1.104)1 ].
In einem kartesischen Koordinatensystem mit x und y in der Ebene der Erdoberfläche und z nach oben hat die Schwerebeschleunigung des homogenen Gravitationsfeldes die Darstellung g = −gez . Die Komponenten der Bewegungsgleichung sind
dann
ẍ = 0,
ÿ = 0,
z̈ = −g.
(1.105)
Im folgenden betrachten wir zwei konkrete Beispiele von Bewegungen im homogenen
Schwerefeld.
Der freie Fall
Ein Körper, der sich relativ zur Erdoberfläche in Ruhe befindet, wird zur Zeit t = 0
in der Höhe h ausgeklinkt. Das Erdschwerefeld wird als homogen betrachtet und Effekte, die sich ergeben, weil die Erdoberfläche streng genommen kein Inertialsystem
darstellt, werden vernachlässigt. Die Integration des Impulssatzes ergibt dann
z̈(t) = −g,
ż(t) = ż(0) − gt = −gt,
z(t) = z(0) − 21 gt2 = h − 12 gt2 .
(1.106)
(1.107)
(1.108)
Die Fallzeit T bestimmt sich danach zu
s
2h
,
g
und die Geschwindigkeit beim Aufschlagen auf der Erdoberfläche beträgt
0=h−
1
gT 2
2
⇒
T =
(1.109)
q
ż(T ) = −gT =
2gh.
(1.110)
Es sei noch einmal erwähnt, daß alle Ergebnisse unabhängig von der Masse des
betrachteten Körpers sind; sie gelten gleichermaßen für eine Feder wie für einen
Hammer.
Der schiefe Wurf
Wir betrachten nun die allgemeine Bewegung eines Massenpunktes im homogenen
Schwerefeld −gez . Der Anfangsort und die Anfangsgeschwindigkeit seien gegeben
durch
x(0) = x0 ,
v(0) = v 0 .
(1.111)
Integration der Bewegungsgleichung ergibt dann
mẍ
ẍ
ẋ
x
22
=
=
=
=
−mgez ,
−gez ,
v 0 − gt ez ,
x0 + v 0 t − 12 gt2 ez .
(1.112)
1.4 Der Impulssatz
Die beschriebene Bahn verläuft offenbar in der aus den Vektoren v 0 und ez aufgespannten Ebene. Wir legen daher unser Koordinatensystem so, daß diese Ebene mit
der x-z-Ebene zusammenfällt, und erhalten in Komponenten für die Geschwindigkeit
vx = v0x ,
vz = v0z − gt,
(1.113)
und für die Bahnkurve
x = x0 + v0x t,
z = z0 + v0z t − 12 gt2 .
(1.114)
Bemerkungen:
• Die horizontale Bewegungskomponente beim schiefen Wurf stellt eine gleichförmige Bewegung dar.
• (1.114) ist die mit der Zeit t parameterisierte Darstellung der Wurfparabel
(Abb. 1.6). Das erkennt man, wenn man daraus die Zeit eliminiert, indem
man die erste Gleichung nach t auflöst und in die zweite einsetzt:
µ
g x − x0
z=−
2
v0x
¶2
µ
+ v0z
¶
x − x0
+ z0 .
v0x
(1.115)
Abbildung 1.6: Bahnkurve beim schiefen Wurf.
Die Wurfhöhe H errechnet sich aus der Bedingung
!
vz (tH ) = v0z − gtH = 0
v0z
⇒ tH =
g
⇒ H = zH − z0 = v0z tH − 12 gt2H
v2
⇒ H = 0z .
2g
Die Wurfweite L erhält man in ähnlicher Weise gemäß
(1.116)
!
z(tL ) = z0 + v0z tL − 12 gt2L = z0 (tL > 0)
2v0z
⇒ tL =
g
2v0x v0z
.
⇒ L = xL − x0 = v0x tL =
g
(1.117)
23
1 Punktmechanik
Mit
v0x = v0 sin α,
v0z = v0 cos α
(1.118)
läßt sich das umschreiben zu
L=
2v02
v2
sin α cos α = 0 sin 2α.
g
g
(1.119)
Bei gegebener Abwurfgeschwindigkeit v0 erreicht man folglich die größte Wurfweite
unter einem Abwurfwinkel von α = 45◦ .
1.4.6 Weitere Beispiele
Bewegung entlang einer schiefen Ebene
Ein Massenpunkt bewege sich reibungsfrei auf einer schiefen Ebene der Neigung α
unter der Wirkung des homogenen Schwerefeldes −gez (Abb. 1.7).
Abbildung 1.7: Massenpunkt auf schiefer Ebene.
Im begleitenden Dreibein lauten dann die Bewegungsgleichungen
es :
en :
ms̈ = mg sin α,
0 = N − mg cos α.
(1.120)
Mit den Anfangsbedingungen s(0) = s0 , ṡ(0) = v0 erhält man hieraus
s(t) = s0 + v0 t + 12 gt2 sin α,
N = mg cos α.
(1.121)
Spezialfälle:
• α = 90◦ , s0 = v0 = 0:
s(t) = 12 gt2
(freier Fall).
(1.122)
• α = 0◦ :
s(t) = s0 + v0 t
24
(gleichförmige Bewegung).
(1.123)
1.4 Der Impulssatz
Mathematisches Pendel
Ein Massenpunkt sei an einem masselosen Stab der Länge l aufgehängt und dem
Einfluß des homogenen Schwerefeldes −gez unterworfen (Abb. 1.8). Die Bewegung
finde nur in der x-z-Ebene statt.
Abbildung 1.8: Mathematisches Pendel.
Nach der allgemeinen Beziehung (1.52) für die Beschleunigung bei Bewegung auf
einer Kreisbahn ist
a = lϕ̈eϕ − lϕ̇2 er ,
(1.124)
so daß die Bewegungsgleichungen
eϕ :
er :
mlϕ̈ = −mg sin ϕ,
−mlϕ̇2 = mg cos ϕ − N
(1.125)
resultieren. Hierbei ist die erste Gleichung die eigentliche Differentialgleichung für
die Bewegung,
g
ϕ̈ + sin ϕ = 0,
(1.126)
l
und aus der zweiten Gleichung kann man nach Berechnung von ϕ(t) den zeitlichen
Verlauf der vom Stab aufzubringenden Normalkraft N bestimmen:
N = mg cos ϕ + mlϕ̇2 .
(1.127)
Offenbar setzt sich diese Normalkraft aus dem statischen Anteil mg cos ϕ und dem
Zentrifugalanteil mlϕ̇2 zusammen.
Wir betrachten zunächst die Lösung der Bewegungsgleichung (1.126) für den Spezialfall kleiner Auslenkungen aus der Ruhelage: |ϕ| ¿ 1. Dann gilt
ϕ3
sin ϕ = ϕ −
± . . . ≈ ϕ,
6
und somit ergibt sich die linearisierte Bewegungsgleichung
g
ϕ̈ + ϕ = 0.
l
(1.128)
(1.129)
25
1 Punktmechanik
Es handelt sich um eine lineare Differentialgleichung zweiter Ordnung mit konstanten
Koeffizienten. Setzt man
r
g
ω :=
(1.130)
l
(“Kreisfrequenz”), dann sind offenbar die beiden linear unabhängigen Funktionen
ϕ1 (t) = cos ωt,
ϕ2 (t) = sin ωt
Lösungen von (1.129). Die allgemeine Lösung lautet daher
ϕ(t) = A cos ωt + B sin ωt,
(1.131)
was sich in äquivalenter Form auch als
ϕ(t) = ϕ0 cos(ωt + γ0 )
(1.132)
darstellen läßt. Die Konstanten A, B bzw. ϕ0 , γ0 müssen aus den jeweiligen Anfangsbedingungen für ϕ und ϕ̇ bestimmt werden. Bewegungen der Form (1.131)
bzw. (1.132) heißen harmonische Schwingungen.
Die Schwingungsdauer (Periode) T , definiert als die benötigte Zeit für einen vollen
Schwingungszyklus, ergibt sich aus der Forderung
s
!
ω(t + T ) = ωt + 2π
⇒
2π
l
T =
= 2π
.
ω
g
(1.133)
Die Frequenz ν (Anzahl der Schwingungen pro Zeit) ist gerade der Kehrwert davon:
1
ω
1
ν= =
=
T
2π
2π
r
g
.
l
(1.134)
Wir betrachten nun die volle nichtlineare Bewegungsgleichung (1.126) für die speziellen Anfangsbedingungen
ϕ(t0 ) = 0,
ϕ̇(t0 ) = ϕ̇0 > 0.
(1.135)
Multiplikation von (1.126) mit ϕ̇ ergibt
ϕ̇ϕ̈ + ω 2 ϕ̇ sin ϕ = 0
à !·
ϕ̇2
⇒
− ω 2 (cos ϕ)· = 0
2
2
ϕ̇
ϕ̇2
⇒
− ω 2 cos ϕ = const = 0 − ω 2 .
(1.136)
2
2
Einen solchen Ausdruck bezeichnet man allgemein als erstes Integral der Bewegung.
Wir führen nun die Transformation
ϕ
(1.137)
ψ :=
2
ϕ
⇒ sin2 ψ = sin2 = 21 (1 − cos ϕ)
(Bronstein)
2
⇒ cos ϕ = 1 − 2 sin2 ψ
(1.138)
26
1.4 Der Impulssatz
ein. Damit rechnet man weiter
2ψ̇ 2 − ω 2 + 2ω 2 sin2 ψ =
ϕ̇20
⇒ ψ̇ + ω sin ψ =
4
ϕ̇0 q
⇒ ψ̇ = ±
1 − k 2 sin2 ψ,
2
2
2
ϕ̇20
− ω2
2
2
mit k :=
2ω
.
ϕ̇0
(1.139)
Hier stellt sich offensichtlich ein Vorzeichenproblem. Da wir aber ϕ̇0 > 0 vorausgesetzt haben, wird zumindest für einen bestimmten Zeitbereich t ∈ [t0 , tf ] die
Relation ϕ̇ > 0 und somit auch ψ̇ > 0 erfüllt sein. In (1.139) gilt dann das positive
Vorzeichen, und es kann durch Trennung der Variablen integriert werden:
dψ
ϕ̇0 q
=
1 − k 2 sin2 ψ
dt
2
Z t
2 Zψ
dψ̃
q
⇒
dt̃ =
ϕ̇0 0
t0
1 − k 2 sin2 ψ̃
ψ̇ =
dψ̃
kZψ
k
q
⇒ t − t0 =
=: F (k, ψ).
ω 0
ω
1 − k 2 sin2 ψ̃
(1.140)
Die so definierten, mit k parameterisierten Funktionen F (k, ψ) bezeichnet man als elliptische Integrale erster Art; sie sind tabelliert (Bronstein oder was?!). (1.140) stellt
eine exakte analytische Lösung der nichtlinearen Schwingungs-Differentialgleichung
(1.126) dar (solange ϕ̇ > 0 gilt), allerdings nicht in geschlossener Form.
Abbildung 1.9: Libration und Rotation.
Das Verhalten der Lösung ist je nach dem Wert von k grundsätzlich verschieden:
• k > 1 (kleine Anfangsgeschwindigkeit):
In diesem Fall existiert ein Winkel ψL mit der Eigenschaft 1 − k 2 sin2 ψL = 0,
d. h., der Integrand in (1.140) wird bei Erreichen des Winkels ψL unendlich groß. Daher kann dieser Punkt der Bewegung nicht überwunden werden;
27
1 Punktmechanik
das Pendel schwingt nach Erreichen von ψL wieder zurück (“Libration”, siehe
Abb. 1.9 links). Für den Umkehrwinkel gilt also
sin ψL =
1
k
⇒
1
ϕL = 2ψL = 2 arcsin .
k
(1.141)
Die Schwingungsdauer T ist aus Symmetriegründen gleich der vierfachen Zeit
bis zum Erreichen des Umkehrwinkels:
k
k
1
T = 4 F (k, ψL ) = 4 F (k, arcsin ).
ω
ω
k
(1.142)
• k < 1 (große Anfangsgeschwindigkeit):
In diesem Fall ist der Nenner des Integranden in (1.140) stets größer als Null.
Die Funktion F (k, ψ) ist folglich steng monoton wachsend in ψ. Physikalisch
bedeutet das, daß kein Umkehrpunkt existiert, sondern sich das Pendel überschlägt (“Rotation”, siehe Abb. 1.9 rechts). Die Rotationsdauer TR ist gleich
der doppelten Zeit zum Erreichen des höchsten Punktes bei ϕ = π bzw.
ψ = π/2:
k
π
TR = 2 F (k, ).
ω
2
(1.143)
• k ¿ 1 (sehr große Anfangsgeschwindigkeit): Es gilt 1 − k 2 sin2 ψ̃ ≈ 1, und nach
(1.140) wird F (k, ψ) ≈ ψ. Somit folgt
k
k
ψ=
ϕ
ω
2ω
⇒ ϕ = ϕ̇0 × (t − t0 ).
t − t0 =
(1.144)
Das entspricht einer gleichförmigen Rotationsbewegung mit der Winkelgeschwindigkeit ϕ̇0 , ein Verhalten, das bei sehr großer Anfangsgeschwindigkeit
unmittelbar einleuchtet.
1.4.7 Transformationsverhalten des Impulssatzes
Die Erfahrung zeigt, daß die Gültigkeit des zweiten Newtonschen Gesetzes (F = mẍ)
nur für eine bestimmte Klasse von Bezugssystemen gegeben ist. Beispielsweise wird
sich eine Stahlkugel, die in einem anfahrenden Zug auf einer glatten Tischplatte
liegt, “von selbst” nach hinten in Bewegung setzen, eine offenkundige Verletzung
dieses Gesetzes! Das führt zu folgender Definition:
Bezugssysteme, in denen das zweite Newtonsche Gesetz F = mẍ erfüllt
ist, heißen Inertialsysteme.
28
1.4 Der Impulssatz
Sei {O, ei } ein Inertialsystem, d. h., in ihm gelte F = mẍ. Wie sieht dieses Gesetz für
einen Beobachter aus, der den Massenpunkt von einem anderen, beliebig bewegten
Bezugssystem wahrnimmt?
Ein Wechsel des Bezugssystems erfolgt durch die neue Wahl eines Bezugspunktes
O ? und einer Basis e?i :
{O, ei }
→
{O ? , e?i },
(1.145)
wobei wir zulassen, daß der dadurch beschriebene Bezugssystemwechsel zeitabhängig
sein kann. Da sowohl die ungesternte als auch die gesternte Basis Orthonormalbasen
sein sollen, führt {O ? , e?i } gegenüber {O, ei } eine Starrkörperbewegung aus, also
eine Überlagerung von Translation und Rotation. Derartige Transformationen heißen
Euklidische Transformationen (Abb. 1.10).
Abbildung 1.10: Euklidische Transformation.
Zwischen den Ortsvektoren besteht offenbar der Zusammenhang
x(t) = x? (t) + b(t).
(1.146)
Die Darstellung der Ortsvektoren in den zugehörigen Basen ist
x(t) = x(t) ex + y(t) ey + z(t) ez ,
x? (t) = x? (t) e?x + y ? (t) e?y + z ? (t) e?z .
(1.147)
Wir untersuchen nun den Zusammenhang zwischen den Geschwindigkeiten v, v ?
und zwischen den Beschleunigungen a, a? im ungesternten Inertialsystem bzw. im
beliebigen gesternten System. Dazu zunächst folgender
Hilfssatz: Es sei {ei (t)} ein zeitabhängiges Orthonormalsystem. Dann gibt es eine
eindeutige vektorwertige Funktion ω(t) mit der Eigenschaft
ėi (t) = ω(t) × ei (t).
(1.148)
Beweis: Da {ei } eine Basis des IR3 ist, können die Vektoren ė1 , ė2 und ė3 als Linearkombinationen von e1 , e2 und e3 dargestellt werden:
ėi = Ωik ek
(Einsteinsche Summenkonvention!).
(1.149)
29
1 Punktmechanik
Aus ei · ej = δij folgt durch Differentiation
ėi · ej + ei · ėj = 0.
(1.150)
Einsetzen von (1.149) in diese Beziehung ergibt
Ωik ek · ej + ei · Ωjk ek = 0
⇒ Ωik δkj + Ωjk δik = 0
⇒ Ωij + Ωji = 0.
(1.151)
Die Matrix Ω ist also antisymmetrisch, hat mithin nur drei unabhängige Komponenten und kann ohne Beschränkung der Allgemeinheit als
0
ω3 −ω2
0
ω1
Ω = −ω3
ω2 −ω1
0
(1.152)
dargestellt werden. Ihre Wirkung auf einen beliebigen Vektor z ist dann
−ω2 z3 + ω3 z2
ω1
z1
Ωz = −ω3 z1 + ω1 z3 = − ω2 × z2 = −ω × z,
−ω1 z2 + ω2 z1
ω3
z3
(1.153)
wobei die drei Komponenten ωi der Matrix Ω zum Vektor ω zusammengefaßt wurden. Schreibt man nun (1.149) beispielsweise für e1 auf, so ist
ė1 = ω3 e2 − ω2 e3 ,
(1.154)
was nach (1.152) genau der negativen ersten Spalte der Matrix Ω entspricht:
ė1 = −Ωe1 = ω × e1 .
(1.155)
Entsprechendes gilt für ė2 und ė3 , so daß der Hilfssatz beweisen ist. Mit diesem
Hilfsmittel beweisen wir nun den
Hauptsatz der Kinematik der Relativbewegung:
Sei {O, ei } ein Bezugssystem mit zugehörigen Geschwindigkeits- und Beschleunigungsvektoren
dx
= ẋ(t) ex + ẏ(t) ey + ż(t) ez ,
dt
d2 x
a = 2 = ẍ(t) ex + ÿ(t) ey + z̈(t) ez .
dt
v=
(1.156)
Sei weiterhin {O ? , e?i } ein anderes Bezugssystem mit zugehörigen Geschwindigkeitsund Beschleunigungsvektoren
d? x?
= ẋ? (t) e?x + ẏ ? (t) e?y + ż ? (t) e?z ,
dt
d?2 x?
a? =
= ẍ? (t) e?x + ÿ ? (t) e?y + z̈ ? (t) e?z .
dt2
v? =
30
(1.157)
1.4 Der Impulssatz
Die Bewegung von {O ? , e?i } relativ zu {O, ei } werde durch
b(t),
ω(t)
beschrieben.
Dann gelten die folgenden Zusammenhänge:
v = v ? + ω × x? + ḃ,
a = a? + 2ω × v ? + ω × (ω × x? ) + ω̇ × x? + b̈.
(1.158)
Beweis: Wir differenzieren x = x? + b (Gl. (1.146)) nach der Zeit:
v =
=
=
=
=
dx? db
+
dt
dt
db
d ? ?
(xi ei ) +
dt
dt
? ?
? ?
ẋi ei + xi ėi + ḃ
ẋ?i e?i + x?i ω × e?i + ḃ
v ? + ω × x? + ḃ.
(1.159)
Nochmalige Differentiation ergibt
dv ?
d
dḃ
+ (ω × x? ) +
dt
dt
dt
d ? ?
dω
d
dḃ
=
(ẋi ei ) +
× x? + ω × (x?i e?i ) +
dt
dt
dt
dt
? ?
?
?
?
? ?
= ẍi ei + ẋi ω × ei + ω̇ × x + ω × ẋi ei + ω × (x?i ω × e?i ) + b̈
= a? + 2ω × v ? + ω × (ω × x? ) + ω̇ × x? + b̈,
(1.160)
a =
was zu beweisen war.
Ist das ungesternte Bezugssystem {O, ei } ein Inertialsystem, so haben die diversen
in (1.158) auftretenden Größen die folgenden Bezeichnungen:
v
a
vr
vd
vf
ar
ac
az
ae
af
=
=
=
=
=
=
=
=
=
v?
ω × x?
ḃ
a?
2ω × v ?
ω × (ω × x? )
−ω 2 x? + ω(ω · x? )
ω̇ × x?
b̈
Damit ist
v = vr + vd + vf ,
a = ar + ac + az + ae + af .
absolute Geschwindigkeit,
absolute Beschleunigung,
Relativgeschwindigkeit,
Drehgeschwindigkeit,
Führungsgeschwindigkeit,
Relativbeschleunigung,
Coriolisbeschleunigung,
Zentripetalbeschleunigung,
Eulerbeschleunigung,
Führungsbeschleunigung.
(1.161)
Folgerungen:
31
1 Punktmechanik
• Für beliebige Bewegungen gilt
v = vr
⇐⇒
b(t) ≡ b0 , ω(t) ≡ 0.
(1.162)
Absolute Geschwindigkeit und Relativgeschwindigkeit sind dann und nur dann
gleich, wenn der Wechsel des Bezugssystems maximal aus einer zeitlich konstanten Translation besteht.
• Für beliebige Bewegungen gilt
a = ar
⇐⇒
b(t) = b0 + c0 t, ω(t) ≡ 0.
(1.163)
Absolute Beschleunigung und Relativbeschleunigung sind dann und nur dann
gleich, wenn der Wechsel des Bezugssystems maximal aus einer geradliniggleichförmigen Translation besteht. Diese Unterklasse der Euklidischen Transformationen heißt Galilei-Transformationen.
• Aus dem zuletzt Gesagten folgt unmittelbar, daß das zweite Newtonsche Gesetz F = ma invariant gegenüber Galilei-Transformationen ist. Anders formuliert: Galilei-Transformationen überführen Inertialsysteme in Inertialsysteme.
• Sei {O, ei } ein Inertialsystem, für welches das zweite Newtonsche Gesetz die
Gestalt F = ma annimmt. Dann ist
mar = F − mac − maz − mae − maf
= F + Fc + Fz + Fe + Ff
(1.164)
das zweite Newtonsche Gesetz bezogen auf ein beliebiges gegenüber {O, ei }
bewegtes System (“Relativitätsprinzip”). Es heißen
F c = −mac
F z = −maz
F e = −mae
F f = −maf
=
=
=
=
=
2mv ? × ω
−mω × (ω × x? )
mω 2 x? − mω(ω · x? )
mx? × ω̇
−mb̈
Corioliskraft,
Zentrifugalkraft,
Eulerkraft,
Führungskraft.
Man beachte, daß Zeit- und Längenmaßstäbe beim Bezugssystemwechsel via Euklidische Transformationen beibehalten werden. In der speziellen Relativitätstheorie,
die bei Geschwindigkeiten in der Größenordnung der Lichtgeschwindigkeit relevant
wird, ist das nicht mehr so.
32
1.4 Der Impulssatz
Anwendung: Ostabweichung fallender Körper
Wir betrachten ein fest mit der rotierenden Erde verbundenes Bezugssystem, wobei
der Ursprung O ? auf der Erdoberfläche liegt, e?x nach Süden, e?y nach Osten und e?z
lotrecht nach oben weist (Abb. 1.11). Die Winkelgeschwindigkeit ω der Erdrotation
sei konstant.
Nach (1.164) ist dann mit F = mg 0 und ω̇ = 0
mar = mg 0 + F z + F f + F c .
(1.165)
Die Anteile der Führungskraft F f , welche hier die Zentrifugalkraft aufgrund der
Kreisbewegung des Ursprungs O ? um die Erdachse ist, und der eigentlichen Zentrifugalkraft F z werden zusammen mit der reinen Gravitationskraft mg 0 zur effektiven
Schwerkraft mg zusammengefaßt, welche dann stets senkrecht auf der abgeplatteten
Erdoberfläche steht. Weiterhin nehmen wir wie gehabt an, daß dieses Schwewefeld
homogen ist: g = −ge?z .
Abbildung 1.11: Bezugssystem auf rotierender Erde.
Die Bewegungsgleichung (Impulssatz) vereinfacht sich dann zu
mar = mg + F c
⇒ mar = −mg e?z + 2mv ? × ω
d?2 x?
d? x?
?
⇒
=
−g
e
+
2
× ω.
(1.166)
z
dt2
dt
Die Sterne seien bei der folgenden Rechnung weggelassen, da keine Verwechslungsgefahr besteht. Die Komponentendarstellung von ω ist im gewählten Koordinatensystem (Abb. 1.11) in Abhängigkeit von der geographischen Breite ϕ
ω = −ω cos ϕ ex + ω sin ϕ ez .
(1.167)
Das ergibt die Bewegungsgleichung in Komponenten
ẍ = 2ẏ ω sin ϕ,
ÿ = −2ż ω cos ϕ − 2ẋ ω sin ϕ,
z̈ = −g + 2ẏ ω cos ϕ.
(1.168)
33
1 Punktmechanik
Wir lösen nun dieses Gleichungssystem für die Anfangsbedingungen des freien Falls,
x(0) = h ez ,
ẋ(0) = 0,
(1.169)
wobei geeignete Näherungen zur Anwendung kommen. Es ist klar, daß in (1.168)3
der Schwerkraftanteil g den kleinen Coriolisanteil 2ẏ ω cos ϕ bei weitem überwiegt,
zumal ja die Anfangsbedingungen ẏ(0) = 0 beinhalten. Damit rechnet man
z̈ = −g
⇒ z(t) = h − 12 gt2 .
(1.170)
Die z-Komponente der Bewegung entspricht also in dieser Näherung dem freien Fall
bei Abwesenheit von Trägheitskräften.
Es ist anschaulich klar, daß die gesamte Bewegung im wesentlichen aus diesem ungestörten freien Fall besteht, und alles andere nur kleine Störungen verursacht. Daher
gilt im Verlauf der Bewegung vz À vx , so daß in (1.168)2 der erste Term rechts über
den zweiten dominiert (außer an den Polen, da dort cos ϕ = 0 ist). Mit (1.170) folgt
ÿ = −2ż ω cos ϕ = 2gt ω cos ϕ.
gt3
⇒ y(t) =
ω cos ϕ.
3
(1.171)
Durch Einsetzen dieses Ergebnisses in (1.168)1 erhalten wir schließlich
ẍ = 2ẏ ω sin ϕ = 2gt2 (ω cos ϕ)(ω sin ϕ) = gt2 ω 2 sin 2ϕ
gt4 2
⇒ x(t) =
ω sin 2ϕ.
12
(1.172)
Durch (1.170) – (1.172) ist die Bewegung vollständig bestimmt. Wir ersetzen in
(1.171) und (1.172) die Zeit durch die durchfallene Strecke h − z:
h − z = 12 gt2
Ã
!1/2
2(h − z)
⇒ t=
g
√
2 2
⇒ y(h − z) = √ (h − z)3/2 ω cos ϕ,
3 g
1
x(h − z) = (h − z)2 ω 2 sin 2ϕ.
3g
(1.173)
(1.174)
y(t) beschreibt eine Ostabweichung, x(t) auf der Nordhalbkugel eine Südabweichung
bzw. auf der Südhalbkugel eine Nordabweichung fallender Körper. Für die geographische Breite von Darmstadt (ϕ = 50◦ ) erhält man bei einer durchfallenen Höhe
h − z = 100 m mit ω = 2π · 1 d−1 = 7.27 · 10−5 s−1 die Werte
y = 1.407 cm,
x = 1.770 µm.
Die Nord-/Südabweichung fallender Körper ist also in der Praxis völlig vernachlässigbar, die Ostabweichung dagegen bei großen Fallhöhen durchaus merklich.
34
1.5 Der Energiesatz
1.5 Der Energiesatz
1.5.1 Herleitung des Energiesatzes
In einer rein mechanischen Theorie, welche wir hier entwickeln (d. h., ohne Berücksichtigung thermodynamischer Konzepte wie Temperatur, innere Energie, Wärme)
ist der Energiesatz keine unabhängige Aussage, sondern kann aus dem Impulssatz
hergeleitet werden. Dazu betrachten wir die Bewegung x(t) eines Massenpunktes
im Zeitintervall [t1 , t2 ] unter dem Einfluß der äußeren Kraft F (t) und multiplizieren
den zugehörigen Impulssatz mit ẋ:
mẍ(t) = F (t)
⇒ mẋ(t) · ẍ(t) = F (t) · ẋ(t)
µ
¶·
m 2
⇒
ẋ (t) = F (t) · ẋ(t).
2
(1.175)
Mit den Definitionen der skalaren Größen
L := F · v
m 2
v
T :=
2
(“Leistung”),
(“kinetische Energie”)
(1.176)
stellt diese Folgerung aus dem Impulssatz die Bilanz der kinetischen Energie dar:
Ṫ (t) = L(t).
(1.177)
Die zeitliche Änderung der kinetischen Energie ist also gleich der durch die äußere
Kraft zugeführten Leistung.
Integration über die Zeit ergibt weiter
Zt2
Zt2
Ṫ (t) dt =
L(t) dt
t1
t1
Zt2
Zt2
⇒
Ṫ (t) dt =
t1
F (t) ·
t1
x
Z2
⇒ T2 − T1 =
dx
dt
dt
F · dx.
(1.178)
x1
Definiert man die Arbeit W12 der Kraft F als
Zx2
W12 :=
F · dx,
(1.179)
x1
so erhält man schließlich den Energiesatz der Mechanik:
T2 − T1 = W12 .
(1.180)
35
1 Punktmechanik
Er besagt in Worten, daß die Differenz der kinetischen Energie zwischen den Zeitpunkten t1 und t2 gleich der in dieser Zeit von der Kraft F am Massenpunkt geleisteten Arbeit ist.
Durch die Skalarprodukt-Bildung bei der Herleitung des Energiesatzes aus dem Impulssatz ist aus der ursprünglich vektoriellen Gleichung (drei Komponenten) eine
skalare Gleichung (eine Komponente) entstanden. Daraus folgt, daß der Energiesatz
im allgemeinen nicht die volle Information des Impulssatzes enthält (ausgenommen
bei eindimensionalen Bewegungen). Dennoch ist er bei vielen Problemen nützlich.
Abbildung 1.12: Zur Definition der Arbeit.
1.5.2 Konservative Kräfte
Definition und Eigenschaften
Der Energiesatz (1.180) ist für jede beliebige Form der äußeren Kraft gültig. Dabei
stellt der Integralausdruck in der Definition der Arbeit (1.179) ein Kurvenintegral
längs der Bahnkurve der Bewegung des Massenpunktes dar, summiert also die differentiellen Arbeiten F · dx für alle Weginkremente dx längs x(t) zwischen den
Endpunkten x1 und x2 auf (Abb. 1.12). Daher ist W12 im allgemeinen nicht nur von
den Endpunkten x1 und x2 , sondern auch vom Verlauf der Bahnkurve x(t) selbst
abhängig:
W12 = W12 (x1 , x2 , x(t)).
(1.181)
Es gibt aber spezielle äußere Kraftfelder, bei denen das Kurvenintegral in (1.179)
und somit die geleistete Arbeit W12 stets wegunabhängig sind:
W12 = W12 (x1 , x2 ).
(1.182)
Solche Kräfte heißen konservativ.
Satz: F (x) ist genau dann ein konservatives Kraftfeld, wenn die Arbeit längs beliebiger geschlossener Wege verschwindet:
Z
W12 =
F (x) · dx =
C1
36
Z
I
F (x) · dx
C2
⇐⇒
W° =
F (x) · dx = 0. (1.183)
1.5 Der Energiesatz
Beweis “⇒”: Sei F (x) konservatives Kraftfeld, W12 also wegunabhängig. Wir betrachten eine beliebige geschlossene Kurve und zerlegen sie in zwei Teilkurven C1
und C2 (Abb. 1.13).
Abbildung 1.13: Wegunabhängigkeit und geschlossene Wege bei konservativen
Kräften.
Dann rechnet man
I
W° =
Z
F (x) · dx =
Z
F (x) · dx −
C1
F (x) · dx = W12 − W12 = 0,
C2
was zu zeigen war. Der Beweis “⇐” funktioniert analog.
Satz: F (x) ist genau dann ein konservatives Kraftfeld, wenn ein skalares Feld V (x)
existiert mit der Eigenschaft
F (x) = −grad V (x).
(1.184)
V (x) heißt Potential oder potentielle Energie der Kraft F (x).
Beweis “⇒”: Für ein konservatives Kraftfeld F (x) ist das Arbeitsintegral W12 vom
Weg unabhängig, d. h., für ein fest gewähltes x0 ist
Zx
V (x) := −
F (r) · dr
(1.185)
x0
eine eindeutig definierte Funktion. Mit einem beliebigen Vektor h gilt für diese
Funktion
x+sh
Z
Zx
F (r) · dr +
V (x + sh) − V (x) = −
F (r) · dr
x0
x0
x+sh
Z
= −
F (r) · dr
x
Zs
= −
F (x + τ h) · h dτ.
τ =0
Nach dem Mittelwertsatz der Integralrechnung existiert ein ϑ ∈ (0, 1) mit der Eigenschaft
Zs
F (x + τ h) · h dτ = s F (x + sϑh) · h,
τ =0
37
1 Punktmechanik
so daß
V (x + sh) − V (x)
= −F (x + sϑh) · h
s
∂V
V (x + sh) − V (x)
(x) = lim
= −F (x) · h
s→0
∂h
s
⇒
⇒ grad V (x) · h = −F (x) · h
⇒ F (x) = −grad V (x),
was zu zeigen war.
Beweis “⇐”: Es existiere ein skalares Feld V mit der Eigenschaft F (x) = −grad V (x).
Dann erhält man für das Arbeitsintegral längs eines beliebigen Weges von x1 nach
x2
Zx2
W12 =
Zx2
F · dx = −
x1
Zx2 Ã
= −
x1
Zx2
= −
grad V · dx
x1
∂V
∂V
∂V
dx +
dy +
dz
∂x
∂y
∂z
!
dV = −(V (x2 ) − V (x1 )) = V1 − V2 .
x1
W12 hängt folglich nur von den Endpunkten x1 und x2 , nicht aber vom Weg x(t)
ab, was zu zeigen war.
Da die Rotation des Gradienten stets verschwindet, folgt sofort, daß konservative
Kraftfelder rotationsfrei sind:
rot F (x) = −rot grad V (x) = 0.
(1.186)
Es gilt weiterhin der folgende
Satz: Für ein Kraftfeld F (x) sei auf einem einfach zusammenhängenden Bereich
(d. h., ohne Loch)
rot F (x) = 0
(1.187)
erfüllt. Dann ist das Kraftfeld in diesem Bereich konservativ und kann gemäß F =
−grad V als Gradient einer skalaren Funktion V dargestellt werden.
Beweis: Wir betrachten in dem einfach zusammenhängenden Bereich eine beliebige
geschlossene Kurve C und die davon eingeschlossene Fläche A. Dann ist wegen des
Stokesschen Integralsatzes
I
W° =
Z
F (x) · dx =
C
Z
rot F (x) · dA =
A
0 · dA = 0.
A
Folglich verschwindet die Arbeit längs beliebiger geschlossener Wege, und somit ist
nach dem zuerst bewiesenen Satz das Kraftfeld konservativ.
38
1.5 Der Energiesatz
Energiesatz für konservative Kräfte
Wir formulieren nun die Bilanz der kinetischen Energie (1.177) bzw. den Energiesatz
(1.180) für den Spezialfall konservativer Kräfte. Für die Leistung einer konservativen
Kraft erhält man
L = F · v = −grad V · ẋ
(
)
∂V
∂V
∂V
= −
ẋ +
ẏ +
ż
∂x
∂y
∂z
d
= − (V (x, y, z)) = −V̇ ,
dt
(1.188)
so daß aus (1.177) die Relation
Ṫ + V̇ = 0
(1.189)
resultiert. Die integrierte Form davon lautet
T1 + V 1 = T2 + V 2
⇐⇒
T + V = E = const.
(1.190)
Das ist der Energieerhaltungssatz (Energiesatz für konservative Kräfte) der Mechanik: Wenn die Kräfte, die auf einen Massenpunkt wirken, konservativ sind, dann
bleibt die mechanische Energie E = T + V (Summe aus kinetischer und potentieller
Energie) des Massenpunktes erhalten.
Es sei noch einmal daran erinnert, daß der Energieerhaltungssatz der Mechanik
keine unabhängige Aussage darstellt, sondern eine Folgerung aus dem zweiten Newtonschen Gesetz (Impulssatz) ist. Wenn dem Massenpunkt jedoch zusätzlich eine
innere Energie U zugeschrieben sowie eine Wärmezufuhr Q12 berücksichtigt wird,
postuliert man als Erweiterung den Energiesatz der Thermodynamik, welcher besser
als Erster Hauptsatz der Thermodynamik bekannt ist:
T2 + V2 + U2 − (T1 + V1 + U1 ) = Q12 .
(1.191)
Er gilt in dieser Form nur für konservative Kraftfelder, kann aber auch allgemein für
nichtkonservative Kraftfelder formuliert werden (vgl. (1.180)):
T2 + U2 − (T1 + U1 ) = W12 + Q12 .
(1.192)
1.5.3 Anwendungen
Stabilität von Gleichgewichtslagen
Definition: Ein Massenpunkt ist im Gleichgewicht, wenn ein Inertialsystem existiert, relativ zu welchem er sich in Ruhe befindet.
Folgerung: Notwendige und hinreichende Bedingung dafür ist, daß die Kraft auf
den Massenpunkt verschwindet:
F =0
⇐⇒
Massenpunkt im Gleichgewicht.
(1.193)
39
1 Punktmechanik
Für konservative Kraftfelder ist die Gleichgewichtsbedingung demnach
grad V = 0,
bzw. in kartesischen Koordinaten
∂V
∂V
∂V
=
=
= 0.
∂x
∂y
∂z
(1.194)
(1.195)
Die potentielle Energie nimmt also in der Gleichgewichtslage einen Extremalwert
an. Das kann ein Maximum, ein Minimum oder ein Sattelpunkt sein.
Wir untersuchen nun die Stabilitätseigenschaften von Gleichgewichtslagen in konservativen Kraftfeldern. Dazu betrachten wir die Gleichgewichtslage von einem Inertialsystem {O, ei } aus, relativ zu dem der Massenpunkt in Ruhe ist (x(t) ≡ x0 ,
ẋ(t) ≡ 0), und machen den Stabilitätsbegriff fest mit der
Definition: Eine Gleichgewichtslage x(t) ≡ x0 , ẋ(t) ≡ 0 in einem konservativen
Kraftfeld, gegeben durch
grad V |x=x0 = 0,
(1.196)
heißt
• stabil, wenn das Potential in x0 ein Minimum annimmt,
• indifferent, wenn das Potential in einer Umgebung von x0 konstant ist,
• instabil oder labil ansonsten.
Abbildung 1.14: Gleichgewichtslagen im homogenen Schwerefeld.
Zur Veranschaulichung betrachten wir die drei Situationen von Abb. 1.14. Die Kugel
im nach unten gewölbten Uhrglas befindet sich im stabilen Gleichgewicht, weil das
Potential V = mgz des homogenen Schwerefeldes F = −mg ez (siehe nächstes Beispiel) bei x = 0 ein Minimum hat. In der Umgebung der Gleichgewichtslage ist daher
die Kraft immer auf diese hin gerichtet, so daß kleine Störungen des Gleichgewichts
für alle Zeiten klein bleiben. Das Gleichgewicht der Kugel auf dem nach oben gewölbten Uhrglas ist instabil, weil das Potential dort ein Maximum hat: Die Kraft in der
Umgebung der Gleichgewichtslage weist stets von dieser weg, und kleine Störungen
werden verstärkt. Ein indifferentes Gleichgewicht mit konstantem Potential liegt bei
der Kugel auf der Ebene vor, wobei auch in der Umgebung der Gleichgewichtslage keine Kräfte auf den Massenpunkt wirken. Jeder benachbarte Punkt ist folglich
ebenfalls eine mögliche Gleichgewichtslage.
40
1.5 Der Energiesatz
Freier Fall
Wir betrachten noch einmal den freien Fall im homogenen Schwerefeld g = −gez
mit den Anfangsbedingungen z(0) = h, ż(0) = 0 (vgl. §1.4.5; eindimensionale Bewegung in z-Richtung, nach unten beschleunigt, also ż ≤ 0). Die Kraft auf einen
Massenpunkt der Masse m ist dann wie gehabt F = mg = −mgez , und es gilt im
gesamten Raum
rot F = −mg rot ez = 0.
(1.197)
Das homogene Schwerefeld ist also ein konservatives Kraftfeld, und das zugehörige
Potential ist
V (x) = −
Z x
x0
(−mgez ) · dx = mg
Z x
x0
dz = mgz − mgz0 = mgz + V0 .
(1.198)
Man erkennt, daß das Potential nur bis auf eine additive Konstante bestimmt ist.
Diese Eigenschaft ist nicht auf das homogene Schwerefeld beschränkt, sondern gilt
ganz allgemein für konservative Kraftfelder.
Der Energieerhaltungssatz (1.190) lautet mit der Wahl V0 = 0
m 2
ż + mgz = E = mgh,
2
(1.199)
bzw.
q
ż = − 2g(h − z).
(1.200)
Diese nichtlineare Differentialgleichung erster Ordnung kann durch Trennung der
Variablen integriert werden:
√
q
dz
= − 2g
h−z
Zz
⇒
Zt
−1/2
dz̃ = −(2g)
1/2
1/2
(h − z̃)
1/2
dt̃
0
h
⇒ −2(h − z) = −(2g)
⇒ 4(h − z) = 2gt2
⇒ z(t) = h − 21 gt2 .
t
(1.201)
Das ist genau das Ergebnis, das wir in §1.4.5 mit Hilfe des Impulssatzes hergeleitet
hatten (siehe (1.108)). Die Berechnung der vollen Bahn der Bewegung x(t) mit dem
Energiesatz ist jedoch nur aufgrund der Eindimensionalität des Problems möglich,
da ansonsten, wie bereits erwähnt, der skalare Energiesatz nicht die volle Information
des vektoriellen Impulssatzes beinhaltet.
41
1 Punktmechanik
Schiefer Wurf
Für die ebenfalls in §1.4.5 behandelte allgemeine Bewegung eines Massenpunktes im
homogenen Schwerefeld (x(0) = x0 , v(0) = v 0 ) lautet der Energieerhaltungssatz
m 2
m
v + mgz = E = v02 + mgz0
2
2
q
2
(1.202)
⇒ v = |v| = v0 + 2g(z0 − z).
Man erhält also den Betrag der Geschwindigkeit in Abhängigkeit der momentanen
Höhe z(t). Der eigentliche Verlauf der Bewegung kann jedoch nicht berechnet werden.
Geführte Fallbewegung
Ein Massenpunkt bewege sich reibungsfrei im homogenen Schwerefeld entlang einer
vorgeschriebenen Raumkurve x(s) (geführte Fallbewegung, “Perle auf gebogenem
Draht”), wobei s die Bogenlänge sei (Abb. 1.15). Man spricht in einem solchen Fall
von einer geometrischen Zwangsbedingung.
Abbildung 1.15: Geführte Fallbewegung.
Mit dem Potential V = mgz, der kinetischen Eenrgie
m
v = ṡ et ⇒ T = ṡ2
(1.203)
2
und den Anfangsbedingungen s(0) = s0 , ṡ(0) = ṡ0 lautet der Energieerhaltungssatz
für dieses Problem
m 2
m
ṡ + mgz(s) = E = ṡ20 + mgz0
2
2
q
⇒ ṡ = ± ṡ20 + 2g(z0 − z(s)).
(1.204)
Ähnlich wie beim schiefen Wurf ergibt sich der Betrag der Geschwindigkeit in Abhängigkeit der momentanen Höhe z(s). Falls es jedoch möglich ist, in (1.204) das Vorzeichen
a priori festzulegen, kann die Gleichung integriert werden und liefert dann den Bewegungsverlauf s(t).
Bei bekannten Anfangsbedingungen s0 , ṡ0 und gegebener Raumkurve x(s) ist (1.204)
eine Beziehung der Form
ṡ = f (s),
42
(1.205)
1.5 Der Energiesatz
oder in impliziter Darstellung
F (s, ṡ) = 0.
(1.206)
Diese Gleichung stellt den Verlauf der geführten Fallbewegung in der s-ṡ-Ebene
dar, welche man als Phasenebene bezeichnet. Das zugehörige Diagramm, also die
von der Bewegung in der Phasenebene durchlaufene Kurve, heißt Phasendiagramm.
Beispielsweise ist für
s cos α
0
x(s) =
,
−s sin α
(1.207)
also eine schiefe Ebene der Neigung α in der x-z-Ebene (vgl. §1.4.6), und den Anfangsbedingungen s0 = ṡ0 = 0
q
ṡ =
2gs sin α
(1.208)
2
(1.209)
⇒ s(t) = 21 gt sin α.
Der Verlauf dieser Bewegung und das zugehörige Phasendiagramm sind in Abb. 1.16
dargestellt.
Abbildung 1.16: Geführte Fallbewegung auf schiefer Ebene: Bewegungsverlauf und
Phasendiagramm.
Eine solche Darstellung als Phasendiagramm ist natürlich nicht auf die geführte Fallbewegung beschränkt, sondern bei jeder eindimensionalen Bewegung möglich. Im
allgemeinen Fall der dreidimensionalen Bewegung hat man entsprechend als Phasendiagramm eine Raumkurve im sechsdimensionalen x-ẋ-Raum (Phasenraum).
Es ist bemerkenswert, daß bei der Behandlung des Problems der geführten Fallbewegung mit dem Energieerhaltungssatz die Zwangskräfte, welche ja notwendig sind,
um den Massenpunkt auf der vorgegebenen Raumkurve zu halten, überhaupt nicht
in Erscheinung treten. Der Weg über den Impulssatz (zweites Newtonsches Gesetz
F = ma) müßte dagegen diese nicht von vornherein bekannten Zwangskräfte F (z)
gemäß
ma = −mg ez + F (z)
(1.210)
einbeziehen, was einige Mühe bereiten würde. Wir werden noch auf diese Problematik zurückkommen.
43
1 Punktmechanik
1.6 Lineare Schwingungen mit einem Freiheitsgrad
1.6.1 Freie ungedämpfte Schwingungen
Wir betrachten einen an einer masselosen Feder mit linearer Rückstellkraft befestigten Massenpunkt der Masse m bei Abwesenheit sonstiger äußerer Kräfte (Abb. 1.17).
Abbildung 1.17: Federschwinger.
Für die auf den Massenpunkt wirkende Kraft in Abhängigkeit der Auslenkung x gilt
dann das Hookesche Gesetz
F = −c x,
(1.211)
wobei die Konstante c als Federkonstante bezeichnet wird. Der Impulssatz (zweites
Newtonsches Gesetz) lautet somit
mẍ = −cx
⇒ ẍ +
ω02
x = 0,
r
mit ω0 :=
c
.
m
(1.212)
Diese Bewegungsgleichung der linearen eindimensionalen freien ungedämpften Schwingung (Schwingungsgleichung) haben wir bereits in §1.4.6 beim mathematischen Pendel für kleine Auslenkungen kennengelernt. Ihre allgemeine Lösung ist
x(t) = A cos ω0 t + B sin ω0 t,
(1.213)
oder äquivalent
x(t) = a cos(ω0 t + ϕ0 )
(1.214)
(“harmonische Schwingungen”). Für die Anfangsbedingungen
x(0) = x0 ,
v(0) = v0
(1.215)
erhält man durch Einsetzen in (1.213) für die Integrationskonstanten
A = x0 ,
44
B=
v0
,
ω0
(1.216)
1.6 Lineare Schwingungen mit einem Freiheitsgrad
Abbildung 1.18: Harmonische Schwingung.
bzw. durch Einsetzen in die äquivalente Form (1.214)
x0 = a cos ϕ0 ,
s
⇒ a=
x20 +
v0 = −aω0 sin ϕ0
³ v ´2
0
ω0
,
tan ϕ0 = −
v0
.
x0 ω 0
(1.217)
Die resultierende Schwingung ist in Abb. 1.18 gezeigt.
Analog zum mathematischen Pendel sind ferner
r
ω0 =
c
m
ω0
2π
1
2π
=
=
ν0
ω0
Kreisfrequenz,
ν0 =
Frequenz,
T0
Schwingungsdauer.
1.6.2 Freie Schwingungen mit Dämpfung
Wir führen nun in das Federpendel der Abb. 1.17 ein zusätzliches Dämpfungselement
mit geschwindigkeitsproportionaler Dämpfung
FD = −γ ẋ
(1.218)
ein (Abb. 1.19). Die Konstante γ heißt Dämpfungskonstante.
Die Bewegungsgleichung dieses Systems lautet dann
mẍ = FF + FD = −c x − γ ẋ
γ
⇒ ẍ + ẋ + ω02 x = 0
m
⇒ ẍ + 2ω0 D ẋ + ω02 x = 0,
mit D :=
γ
γ
=√
.
2mω0
4mc
(1.219)
45
1 Punktmechanik
Abbildung 1.19: Federpendel mit Dämpfung.
D ist dabei die dimensionslose Dämpfungskonstante.
Analog zur Schwingungsgleichung der ungedämpften Schwingung (1.212) ist (1.219)
eine lineare homogene Differentialgleichung zweiter Ordnung mit konstanten Koeffizienten. Sie hat demnach zwei linear unabhängige Lösungen, welche mit dem Ansatz
x(t) = eλt
(1.220)
bestimmt werden können. Einsetzen dieses Ansatzes ergibt die charakteristische Gleichung
λ2 eλt + 2ω0 D λ eλt + ω02 eλt = 0
⇒ λ2 + 2ω0 D λ + ω02 = 0;
ihre Lösung ist
q
λ1,2 = −ω0 D ±
³
ω02 D2 − ω02 = ω0 −D ±
(1.221)
√
´
D2 − 1 .
(1.222)
Die allgemeine Lösung von (1.219) ist also
x(t) = C1 eλ1 t + C2 eλ2 t .
(1.223)
Je nach der Größe der dimensionslosen Dämpfungskonstante D sind drei verschiedene Fälle zu unterscheiden:
a) Überkritische (starke) Dämpfung:
Dieser Fall liegt vor für
D > 1.
(1.224)
Nach (1.222) sind dann beide λ’s reell und negativ. Demnach ist auch (1.223) mit
reellen Konstanten C1 und C2 reell. Für die Anfangsbedingungen
x(0) = x0 ,
v(0) = v0
(1.225)
erhält man
C1 + C2 = x0 ,
λ1 C1 + λ2 C2 = v0
v 0 − λ 2 x0
v 0 − λ 1 x0
⇒ C1 =
,
C2 = −
λ1 − λ2
λ1 − λ2
n
o
1
⇒ x(t) =
(v0 − λ2 x0 ) eλ1 t − (v0 − λ1 x0 ) eλ2 t
λ1 − λ2
´o
³
´
n ³
1
x0 λ1 eλ2 t − λ2 eλ1 t + v0 eλ1 t − eλ2 t .
⇒ x(t) =
λ1 − λ2
46
(1.226)
1.6 Lineare Schwingungen mit einem Freiheitsgrad
Die Lösung ist in Abb. 1.20 dargestellt. Man erkennt, daß sie ohne Oszillation exponentiell der Null zustrebt.
Abbildung 1.20: Überkritische Dämpfung.
b) Kritische Dämpfung (aperiodischer Grenzfall):
Dieser Fall entspricht
D = 1,
(1.227)
und die Lösungen der charakteristischen Gleichung entarten zu
λ1,2 = −ω0 D = −ω0
(1.228)
(Doppelwurzel). Die Theorie der linearen Differentialgleichungen lehrt, daß dann die
allgemeine Lösung
x(t) = C1 e−ω0 t + C2 te−ω0 t
(1.229)
lautet. Mit den Anfangsbedingungen (1.225) folgt für die Konstanten
C1 = x0 ,
C 2 = v 0 + ω 0 x0 ,
(1.230)
und somit wird
x(t) = {(x0 + (v0 + ω0 x0 )t} e−ω0 t .
(1.231)
Die Lösung verläuft qualitativ wie die der überkritischen Dämpfung (Abb. 1.20); sie
strebt ebenfalls ohne Oszillation dem Wert x(t → ∞) = 0 zu.
c) Unterkritische (schwache) Dämpfung:
In diesem Fall ist
D < 1,
und folglich sind die beiden λ’s komplex:
³
´
√
λ1,2 = ω0 −D ± i 1 − D2 .
(1.232)
(1.233)
47
1 Punktmechanik
Die allgemeine Lösung (1.223) schreibt sich demzufolge
³
´
³
´
√
√
x(t) = C1 exp −ω0 Dt + iω0 1 − D2 t + C2 exp −ω0 Dt − iω0 1 − D2 t
n
o
√
= e−ω0 Dt C1 eiωt + C2 e−iωt ,
mit ω := ω0 1 − D2 .
(1.234)
Physikalisch relevant ist davon nur der Realteil
x(t) = e−ω0 Dt {A cos ωt + B sin ωt} ,
(1.235)
oder äquivalent
x(t) = a e−ω0 Dt cos(ωt + ϕ0 ).
(1.236)
Auf die Bestimmung der Konstanten A, B bzw. a, ϕ0 aus den Anfangsbedingungen
(1.225) sei verzichtet.
Die Bewegung besteht in einer Schwingung mit der Kreisfre√
2
quenz ω = ω0 1 − D < ω0 , eingehüllt von einer exponentiellen Dämpfung mit der
Abklingrate (ω0 D)−1 (Abb. 1.21).
Abbildung 1.21: Unterkritische Dämpfung.
1.6.3 Erzwungene Schwingungen bei periodischer Erregerkraft
Man spricht von einer erzwungenen oder angeregten Schwingung, wenn am schwingenden Körper zusätzlich zu Feder- und Dämpfungskraft eine zeitabhängige äußere
Kraft (“Erregerkraft”) F (t) wirkt (Abb. 1.22). Für diese nehmen wir zunächst einen
periodischen Verlauf
F (t) = F̂ cos Ωt
(1.237)
mit der Kraftamplitude F̂ und der Kreisfrequenz Ω an.
Die Schwingungsdifferentialgleichung lautet dann
mẍ = FF + FD + F (t) = −c x − γ ẋ + F̂ cos Ωt
⇒ ẍ + 2ω0 D ẋ + ω02 x =
48
F̂
cos Ωt.
m
(1.238)
1.6 Lineare Schwingungen mit einem Freiheitsgrad
Abbildung 1.22: Erzwungene Schwingung eines Federpendels.
Wir haben es nun mit einer linearen inhomogenen Differentialgleichung zweiter Ordnung mit konstanten Koeffizienten zu tun. Dabei bedeutet inhomogen, daß auf der
rechten Seite der Differentialgleichung eine nicht-verschwindende Funktion, nämlich
(F̂ /m) cos Ωt, steht.
Nach der Theorie der linearen Differentialgleichungen ist die allgemeine Lösung die
Summe aus
• der allgemeinen Lösung xh (t) der homogenen Differentialgleichung
• und einer beliebigen speziellen Lösung (partikuläre Lösung) xp (t) der vollen
inhomogenen Differentialgleichung.
Erstere haben wir bereits im vorigen Abschnitt berechnet (siehe (1.235), (1.236)).
Für letztere versuchen wir einen Schwingungsansatz mit der Kreisfrequenz der Erregerkraft:
xp (t) = A cos Ωt + B sin Ωt.
(1.239)
Einsetzen in (1.238) ergibt
−Ω2 A cos Ωt − Ω2 B sin Ωt − 2ω0 DΩA sin Ωt + 2ω0 DΩB cos Ωt
+ω02 A cos Ωt + ω02 B sin Ωt =
F̂
cos Ωt,
m
(1.240)
und durch Koeffizientenvergleich in den linear unabhängigen Funktionen cos Ωt,
sin Ωt erhält man weiter
F̂
,
m
+ (ω02 − Ω2 ) B = 0.
[cos Ωt] :
(ω02 − Ω2 ) A + 2Dω0 Ω B
[sin Ωt] :
−2Dω0 Ω A
=
(1.241)
Das sind zwei lineare Gleichungen für die zwei unbekannten Koeffizienten A und B.
Durch Auflösen der zweiten Gleichung nach B und Einsetzen in die erste Gleichung
folgt
A=
F̂
ω02 − Ω2
· 2
,
m (ω0 − Ω2 )2 + (2Dω0 Ω)2
(1.242)
49
1 Punktmechanik
und dieses Ergebnis in die zweite Gleichung eingesetzt ergibt
B=
F̂
2Dω0 Ω
· 2
.
2
m (ω0 − Ω )2 + (2Dω0 Ω)2
(1.243)
Wir sehen, daß mit diesen Ausdrücken für A und B Ansatz (1.239) in der Tat eine
partikuläre Lösung der inhomogenen Differentialgleichung (1.238) ist.
Mit den Abkürzungen
η=
Ω
ω0
(1.244)
(dimensionsloses Verhältnis von Erregerfrequenz und Frequenz der freien ungedämpften Schwingung) und
S=
F̂
F̂
=
2
mω0
c
(1.245)
(statische Auslenkung der Feder unter Belastung mit der Kraft F̂ ) kann man A und
B auch ausdrücken als
A = S
1 − η2
,
(1 − η 2 )2 + (2Dη)2
(1.246)
2Dη
B = S
.
(1 − η 2 )2 + (2Dη)2
Zwecks besserer Interpretierbarkeit rechnen wir nun die eben gefundene partikuläre
Lösung (1.239) in die Form
xp (t) = a cos(Ωt − ψ)
(1.247)
um. Mit dem Additionstheorem (siehe Bronstein)
cos(α ± β) = cos α cos β ∓ sin α sin β
folgt durch Vergleich der beiden Darstellungen
a cos Ωt cos ψ + a sin Ωt sin ψ = A cos Ωt + B sin Ωt.
(1.248)
Koeffizientenvergleich ergibt
[cos Ωt] :
[sin Ωt] :
A = a cos ψ,
B = a sin ψ,
(1.249)
und somit
a =
tan ψ =
50
√
A2 + B 2 =
B
A
S
η 2 )2
[(1 −
2Dη
=
.
1 − η2
+ (2Dη)2 ]1/2
,
(1.250)
1.6 Lineare Schwingungen mit einem Freiheitsgrad
Die Amplitude a entspricht der maximalen Auslenkung, die von der Schwingung
(1.247) erreicht wird, der Phasenwinkel ψ gibt an, um welchen Winkel die Schwingung einem Kosinus-Verlauf hinterherläuft.
Die allgemeine Lösung der Schwingungsdifferentialgleichung (1.238) ist nun
x(t) = xh (t) + a cos(Ωt − ψ),
(1.251)
mit a und ψ aus (1.250). Die beiden frei wählbaren Konstanten, welche zur Berücksichtigung von Anfangsbedingungen für x und v notwendig sind, stecken in der
homogenen Lösung xh (t), welche wir bereits in §1.6.2 für die drei Fälle überkritische, kritische und unterkritische Dämpfung bestimmt haben. Vorausgesetzt, daß die
Dämpfung nicht Null ist, klingt die homogene Lösung jedoch nach einiger Zeit ab
(gedämpfte Schwingung!), so daß nach Ablauf dieser Einschwingzeit die Schwingung
in guter Näherung der partikulären Lösung folgt:
x(t) = xp (t) = a cos(Ωt − ψ).
(1.252)
Diese Lösung sei nun diskutiert. Man sieht zunächst, daß die (Kreis-) Frequenz der
erzwungenen Schwingung (1.252) gleich der (Kreis-) Frequenz der Erregerkraft F (t)
ist, und somit nichts mit den (Kreis-) Frequenzen ω0 oder ω der freien Schwingung
zu tun hat. Für die Amplitude a erkennt man die beiden Grenzfälle
a(η → 0) = S,
(1.253)
a(η → ∞) = 0,
d. h., bei sehr kleinen Erregerfrequenzen entspricht die Schwingungsamplitude der
statischen Auslenkung (logisch!), und bei sehr großen Erregerfrequenzen pfeift sich
das Pendel eins (soll heißen, es passiert praktisch nichts). Eine Extremwertbestimmung für die Amplitude führt auf
−1/2
−S · 12 [(1 − η 2 )2 + (2Dη)2 ]
· [−2(1 − η 2 ) · 2η + 8D2 η]
da
0=
=
dη
(1 − η 2 )2 + (2Dη)2
⇒ −4η(1 − η 2 ) + 8D2 η = 0
!
η6=0
⇒ η 2 − 1 + 2D2 = 0
√
⇒ ηmax = 1 − 2D2
√
⇒ Ωmax = ω0 1 − 2D2 .
(1.254)
Da da/dη in der Umgebung von ηmax außerdem einen Vorzeichenwechsel von plus
nach minus durchläuft, liegt bei ηmax , d. h., für die Erregerfrequenz Ωmax , ein Maximum der Amplitude vor. Dieses Phänomen heißt Resonanz, und die zugehörige
Erregerfrequenz Ωmax entsprechend Resonanzfrequenz. Sie ist bei nichtverschwindender Dämpfung stets kleiner als die Eigenfrequenz der freien ungedämpften Schwingung ω0 , und auch kleiner als die Eigenfrequenz der freien gedämpften Schwingung
51
1 Punktmechanik
√
ω = ω0 1 − D2 . Ferner existiert die Resonanzfrequenz nur für einen positiven Radikanden in (1.254), also für
√
D < 12 2 ≈ 0.7071;
(1.255)
bei größeren Dämpfungen fällt die Amplitude mit wachsender Erregerfrequenz streng
monoton von ihrem Startwert a(η → 0) = S (statische Auslenkung) ab.
Der Wert dieses Maximums, sofern es existiert, errechnet sich durch Einsetzen in
(1.250)1 :
S
.
(1.256)
2D 1 − D2
Hier ist erwähnenswert, daß die Amplitude in Resonanz offensichtlich für sehr kleine
Dämpfungen gegen unendlich strebt (“Resonanzkatastrophe”):
amax = a(ηmax ) =
√
amax (D → 0) = ∞.
(1.257)
In Bild 1.23 ist das Verhalten der Amplitude für verschiedene Dämpfungen dargestellt.
Abbildung 1.23: Amplitude bei erzwungenen Schwingungen.
Der Phasenwinkel ψ entspricht, wie bereits erwähnt, demjenigen Winkel, um welchen
die Schwingung dem reinen Kosinus-Verlauf der anregenden Kraft hinterherläuft
(Bild 1.24). Man erkennt in (1.250)2 zunächst
ψ(η → 0) = 0,
ψ(η = 1) = π/2,
ψ(η → ∞) = π.
52
(1.258)
1.6 Lineare Schwingungen mit einem Freiheitsgrad
Die Schwingung ist also bei kleinen Erregerfrequenzen mit der Anregung in Phase (einleuchtend, da quasi-statischer Prozeß) und bei großen Erregerfrequenzen in
Gegenphase. Im Fall Erregerfrequenz gleich Eigenfrequenz ω0 beträgt der Phasenwinkel π/2 (90◦ ), d. h., die Schwingung läuft der Anregung mit einer Verschiebung
von einem Viertel der Schwingungsdauer hinterher. Bild 1.25 zeigt das Verhalten des
Phasenwinkels für verschiedene Dämpfungen.
Abbildung 1.24: Veranschaulichung des Phasenwinkels.
Abbildung 1.25: Phasenwinkel bei erzwungenen Schwingungen.
1.6.4 Erzwungene Schwingungen bei beliebiger Erregerkraft
Im letzten Abschnitt wurden die erzwungenen Schwingungen nur für den Spezialfall harmonischer Anregung (siehe (1.237)) behandelt. Diese Annahme wird jetzt
fallengelassen.
Wir betrachten zunächst eine Anregung des anfänglich in Ruhe befindlichen Federpendels der Abbildung 1.22 durch einen plötzlichen Kraftstoß zum Zeitpunkt t0 . Für
53
1 Punktmechanik
Abbildung 1.26: Diracsche Delta-Funktion, Kraftstoß zum Zeitpunkt t0 .
die mathematische Beschreibung eines solchen Kraftstoßes eignet sich die Diracsche
Delta-Funktion, welche definiert ist als (Abb. 1.26 links)
(
δ(z) =
0
∞
für z 6= 0,
für z = 0,
(1.259)
wobei die Fläche unter dem Peak bei z = 0 gleich Eins sein soll:
Z∞
δ(z) dz = 1.
(1.260)
−∞
Für eine beliebige Funktion f (z) gilt folglich die wichtige Beziehung
Z∞
Z∞
f (z) δ(z − z0 ) dz =
−∞
f (z0 ) δ(z − z0 ) dz
−∞
Z∞
= f (z0 )
Z∞
δ(z − z0 ) dz = f (z0 )
−∞
δ(z̃) dz̃
−∞
Z∞
⇒
f (z) δ(z − z0 ) dz = f (z0 ).
(1.261)
−∞
Für den Kraftstoß zum Zeitpunkt t0 (Abb. 1.26 rechts) kann man nun schreiben
F (t) = p0 δ(t − t0 );
(1.262)
die Konstante p0 gibt die Stärke des Kraftstoßes an. Bei einer derartigen plötzlichen
Anregung spielen die Feder- und Dämpfungskraft im ersten Moment keine Rolle.
Dem Massenpunkt wird lediglich eine Geschwindigkeit v0 übertragen, die sich nach
tZ0 +ε
v0 = lim (v(t0 + ε) − v(t0 − ε)) = lim
ε→0
µ
¶
p0
p0
⇒ v0 = lim
·1 =
ε→0 m
m
ε→0
t0 −ε
t0 +ε
F (t)
p0 Z
dt = lim
δ(t − t0 ) dt
ε→0 m
m
0
t −ε
(1.263)
berechnen läßt. Die Antwort des Federpendels auf den Kraftstoß (1.262) ist also eine
freie gedämpfte Schwingung mit den Anfangsbedingungen
p0
x(t0 ) = 0,
v(t0 ) = v0 = .
(1.264)
m
54
1.6 Lineare Schwingungen mit einem Freiheitsgrad
Beispielsweise erhält man für überkritische Dämpfung aus der allgemeinen Lösung
(1.223) die Konstanten
p0
p0
0
0
e−λ1 t , C2 = −
e−λ2 t ,
(1.265)
C1 =
m(λ1 − λ2 )
m(λ1 − λ2 )
und somit
x(t) =
´
³
p0
0
0
eλ1 (t−t ) − eλ2 (t−t )
m(λ1 − λ2 )
(für t > t0 ).
(1.266)
Für Zeiten vor t0 ist das Pendel nach Voraussetzung in Ruhe.
Die Antwort des Federpendels auf einen Einheits-Kraftstoß (d. h., p0 = 1) bezeichnet
man als Greensche Funktion G(t, t0 ) des Federpendel-Problems. Sie lautet folglich für
überkritische Dämpfung
³
´
1
λ1 (t−t0 )
λ2 (t−t0 )
e
−
e
m(λ1 − λ2 )
G(t, t0 ) =
0
(für t > t0 ),
(1.267)
0
(für t < t ).
Das Ausrechnen der entsprechenden Greenschen Funktionen für kritische und unterkritische Dämpfung sei dem Leser als Übung überlassen.
Im folgenden wird gezeigt, daß man mit Hilfe der Greenschen Funktion die erzwungene Bewegung des Federpendels für beliebige Erregerkraft konstruieren kann. Das
Federpendel sei also bis zu einer bestimmten Anfangszeit t0 in Ruhe, und werde ab
diesem Zeitpunkt von einer beliebigen zeitabhängigen Erregerkraft F (t) angeregt
(Abb. 1.27).
Abbildung 1.27: Beliebige Erregerkraft für das Federpendel.
Die zugehörige Bewegungsgleichung lautet (vgl. (1.238))
ẍ + 2ω0 D ẋ + ω02 x = F (t),
(1.268)
bzw. in symbolischer Operatorschreibweise
d2
d
(1.269)
+ 2ω0 D + ω02 .
2
dt
dt
Nach Konstruktion ist die Greensche Funktion Lösung dieser Gleichung für den
Einheits-Kraftstoß zur Zeit t0 , also
L[x(t)] = F (t),
mit L =
L[G(t, t0 )] = δ(t − t0 ).
(1.270)
55
1 Punktmechanik
Da der lineare Differentialoperator L nur auf t, nicht aber auf t0 wirkt, kann man
unter Verwendung der Eigenschaft (1.261) der Delta-Funktion diesen Ausdruck mit
F (t0 ) multiplizieren und über t0 aufintegrieren:
F (t0 ) L[G(t, t0 )] = F (t0 ) δ(t − t0 )
⇒ L[F (t0 ) G(t, t0 )] = F (t0 ) δ(t − t0 )
Z∞
Z∞
0
⇒
0
0
F (t0 ) δ(t − t0 ) dt0
L[F (t ) G(t, t )] dt =
−∞
−∞
∞
Z∞
Z
0
0
0
F (t0 ) δ(t − t0 ) dt0
⇒ L F (t ) G(t, t ) dt =
−∞
−∞
∞
Z
⇒ L F (t0 ) G(t, t0 ) dt0 = F (t).
(1.271)
−∞
0
Da G(t, t ) für t0 > t verschwindet (siehe (1.267)), braucht die Integration des Terms
Z∞
F (t0 ) G(t, t0 ) dt0
−∞
nur bis t0 = t anstatt bis t0 = ∞ durchgeführt werden. Weiterhin beginnt nach
Voraussetzung die Erregung erst zur Zeit t0 , so daß F (t0 ) für t0 < t0 verschwindet,
und die untere Grenze bei t0 = t0 statt bei t0 = −∞ gewählt werden kann. Es folgt
t
Z
0
0
0
L F (t ) G(t, t ) dt = F (t).
(1.272)
t0
Ganz offensichtlich ist mit
Zt
F (t0 ) G(t, t0 ) dt0
x(t) =
(1.273)
t0
die Bewegungsgleichung (1.269) für eine zur Zeit t = t0 einsetzende und auf das
vorher in Ruhe befindliche Federpendel wirkende beliebige Erregerkraft F (t) erfüllt.
Man erkennt bei Betrachtung der Lösung (1.273), daß die Bewegung unter dem Einfluß einer beliebigen Kraft F (t) durch die Kenntnis der Kraftstoß-Antwort G(t, t0 )
(Greensche Funktion) bereits vollständig bestimmt ist (was natürlich nicht bedeutet, daß die Integration in (1.273) auch analytisch ausführbar ist...). Die anschauliche
Interpretation dieses Befundes ist, daß die anregende Kraft F (t) in lauter infinitesimale Kraftstöße der Form F (t0 )dt0 · δ(t − t0 ) zerlegt und deren Auswirkung auf das
System aufsummiert wird (Integration!). Das ist jedoch nur aufgrund der Linearität
der Bewegungsgleichung möglich (“Superpositionsprinzip”). Daher ist die Methode
der Greenschen Funktionen prinzipiell auf die Lösung linearer Differentialgleichungen beschränkt, hier allerdings für eine Vielzahl von Problemen einsetzbar.
56
1.7 Zentralbewegung
1.7 Zentralbewegung
1.7.1 Begriffe, allgemeine Eigenschaften
Unter einer Zentralkraft versteht man ein Kraftfeld, dessen Wirkungslinie für alle
Punkte x des Raumes durch ein festes Zentrum geht (Abb. 1.28):
F (x) = F (r) = −f (r) er .
(1.274)
Für f (r) > 0 ist die Kraft anziehend (zum Zentrum hinweisend), für f (r) < 0
abstoßend (vom Zentrum wegweisend).
Abbildung 1.28: Zentralkraft.
Satz: Jede Zentralkraft ist ein konservatives Kraftfeld.
Beweis: Für konstante r0 und V0 betrachten wir die Funktion
Zr
V (r) =
f (r̃) dr̃ + V0 .
(1.275)
r0
Faßt man das als skalares Feld in Kugelkoordinaten r, θ, ϕ auf (wobei keine Abhängigkeiten von θ und ϕ bestehen), dann ist
dV
er = −f (r) er = F (r).
(1.276)
dr
Mit V (r) gemäß (1.275) haben wir also ein Potential zur Zentralkraft F (r) gefunden,
und somit handelt es sich um ein konservatives Kraftfeld, was zu zeigen war.
−grad V (r) = −
Definition: Eine Zentralbewegung liegt dann vor, wenn sich ein Massenpunkt unter
der Einwirkung einer Zentralkraft bewegt.
Zentralbewegungen sind immer ebene Bewegungen. Betrachtet man nämlich zu einer
festen Anfangszeit t0 die aus dem zugehörigen Ortsvektor x(t0 ) und der zugehörigen
Geschwindigkeit v(t0 ) aufgespannte Ebene, dann wirkt auch die momentane Kraft
nach Voraussetzung in dieser Ebene (nämlich parallel zu x(t0 )), so daß die Änderung
der Geschwindigkeit (Beschleunigung) ebenfalls in dieser Ebene stattfindet und der
Massenpunkt diese nicht verlassen kann.
Die Bewegungsgleichung für Zentralbewegungen ist gemäß (1.274)
mẍ = −f (r) er ,
(1.277)
57
1 Punktmechanik
und der Energieerhaltungssatz lautet mit dem Potential (1.275)
T +V =
m 2
v + V (r) = E = const.
2
(1.278)
1.7.2 Drehimpuls und Flächensatz
Unter dem Drehimpuls oder auch Drall L eines Massenpunktes bezüglich des festen
Aufpunktes x0 versteht man allgemein den Vektor
L = (x − x0 ) × p = (x − x0 ) × mv,
(1.279)
und das Drehmoment M bezüglich x0 ist definiert als
M = (x − x0 ) × F .
(1.280)
Mit der Impulsbilanz F = ma rechnet man
dL
= (x − x0 )· × mv + (x − x0 ) × mv̇ = ẋ × mẋ + (x − x0 ) × ma
dt
= (x − x0 ) × F
⇒
dL
= M.
dt
(1.281)
Das ist die Bilanz des Drehimpulses:
Die zeitliche Änderung des Drehimpulses eines Massenpunktes ist gleich
dem Drehmoment, das auf den Massenpunkt wirkt.
Diese Beziehung gilt ganz allgemein und ist wie der Energiesatz eine direkte Konsequenz des zweiten Newtonschen Gesetzes (Impulsbilanz).
Für Zentralkräfte gilt, daß das auf das Kraftzentrum (Ursprung) bezogene Drehmoment verschwindet,
M = x × F = r er × (−f (r) er ) = −rf (r) er × er = 0,
(1.282)
und daher der Drehimpuls bezüglich des Kraftzentrums bei Zentralbewegungen erhalten bleibt:
dL
=0
dt
⇒
L = x × mv = const.
(1.283)
Zentralbewegungen haben also zwei Konstanten der Bewegung, nämlich die Energie
E und den Drehimpuls L.
An (1.283) sieht man übrigens auch formal, daß Zentralbewegungen eben sind, denn
die von x und v aufgespannte Ebene steht zu jedem Zeitpunkt senkrecht auf dem
konstanten Vektor L und kann sich daher nicht ändern.
58
1.7 Zentralbewegung
Abbildung 1.29: Zum Flächensatz.
Die von der Verbindungslinie Kraftzentrum-Massenpunkt (“Fahrstrahl”) überstrichene Fläche ist nach Abb. 1.29
2 dA = |x × dx|
⇒
dA
dx
|L|
= 12 |x ×
| = 12 |x × v| =
.
dt
dt
2m
(1.284)
Aufgrund der Konstanz von L ist also auch die Flächengeschwindigkeit Ȧ für jede
Zentralbewegung konstant. Diesen Befund bezeichnet man als Flächensatz oder als
Zweites Keplersches Gesetz:
Die Verbindungslinie vom Kraftzentrum zum Massenpunkt überstreicht
in gleichen Zeitintervallen gleiche Flächen.
Verwendet man für die Ebene der Bewegung Polarkoordinaten r, ϕ mit dem Kraftzentrum im Ursprung, dann ist nach §1.3.3
L = r er × m(ṙ er + rϕ̇ eϕ ) = mr2 ϕ̇ er × eϕ = mr2 ϕ̇ ez ,
(1.285)
bzw.
L = |L| = mr2 ϕ̇ = const
⇔
ϕ̇ =
L
.
mr2
(1.286)
Mit dieser Formel läßt sich der Energieerhaltungssatz (1.278) noch etwas vereinfachen:
v 2 = (ṙ er + rϕ̇ eϕ )2 = ṙ2 + r2 ϕ̇2 = ṙ2 +
⇒ E=
L2
m2 r 2
m 2
L2
m
ṙ +
+ V (r) = ṙ2 + Veff (r),
2
2
2mr
2
(1.287)
mit dem effektiven Potential
L2
.
Veff (r) = V (r) +
2mr2
(1.288)
Der Energieerhaltungssatz der Zentralbewegung entspricht also dem Energieerhaltungssatz für ein äquivalentes eindimensionales Problem mit dem Potential Veff .
59
1 Punktmechanik
1.7.3 Die Differentialgleichung der Bahn
Eine vollständige Lösung des Zentralbewegungs-Problems in Polarkoordinaten würde
darin bestehen, entweder direkt aus der Bewegungsgleichung (1.277) oder aus der
Energie- und Drehimpulserhaltung durch Integration die Funktionen r(t) und ϕ(t)
zu bestimmen. Das läßt sich zwar formal durchführen, führt aber im allgemeinen auf
Ausdrücke, die nicht analytisch berechenbar sind und wird hier nicht weiter verfolgt.
Statt dessen werden wir nun die Differentialgleichung für die Bahn in der Darstellung
r(ϕ) herleiten. Nach §1.3.3 ist in Polarkoordinaten
ẍ = (r̈ − rϕ̇2 ) er + (2ṙϕ̇ + rϕ̈) eϕ ,
(1.289)
so daß für die beiden Komponenten der Bewegungsgleichung (1.277) folgt:
mr̈ − mrϕ̇2 = −f (r),
2mṙϕ̇ + mrϕ̈ = 0.
[er ] :
[eϕ ] :
(1.290)
Die erste Gleichung wird mit (1.286)
mr̈ −
L2
+ f (r) = 0,
mr3
(1.291)
und die zweite Gleichung entspricht
m (rϕ̈ + 2ṙϕ̇) = 0
⇒
md ³ 2 ´
r ϕ̇ = 0
r dt
⇒
d ³ 2 ´ dL
mr ϕ̇ =
= 0,
dt
dt
(1.292)
stellt also die bereits bekannte Konstanz des Drehimpulses dar.
Wir fassen nun r der Bewegungsgleichung (1.291) als Funktion r(ϕ) auf. Dann ist
wegen der Kettenregel der Differentialrechnung und (1.286)
dr
dr(ϕ) dϕ
L dr(ϕ)
L d
=
=
=−
2
dt
dϕ dt
mr dϕ
m dϕ
Ã
d
L d
d2 r
=
−
2
dt
dϕ
m dϕ
Ã
1
r(ϕ)
!!
Ã
!
1
,
r(ϕ)
dϕ
L2 d2
·
=− 2 2
dt
m r dϕ2
Ã
!
1
,
r(ϕ)
(1.293)
was in (1.291) eingesetzt auf die Gleichung
L2
d2
− 2
mr (ϕ) dϕ2
d2
⇒
dϕ2
60
Ã
Ã
!
L2
1
−
+ f (r(ϕ)) = 0
r(ϕ)
mr3 (ϕ)
!
1
m
1
+
= 2 r2 (ϕ) f (r(ϕ))
r(ϕ)
r(ϕ)
L
(1.294)
1.7 Zentralbewegung
führt. Setzt man noch
1
,
ξ(ϕ) =
r(ϕ)
(1.295)
ergibt sich schließlich
d2 ξ
m f (1/ξ)
+ξ = 2
2
dϕ
L
ξ2
(1.296)
als Differentialgleichung der Bahn. Diese Gleichung ist wegen der rechten Seite im
allgemeinen nichtlinear, kann aber für spezielle Kraftfelder in geschlossener Form
gelöst werden.
1.7.4 Kepler-Bewegung
Kraft und Potential
Ein Massenpunkt der Masse M sei im Ursprung des Koordinatensystems fixiert.
Dann wirkt nach dem Newtonschen Gravitationsgesetz auf einen zweiten Massenpunkt der Masse m in beliebiger Position x = r er die Gravitationskraft
F = −Γ
Mm
er .
r2
(1.297)
Dabei ist Γ = 6.67 · 10−11 N m2 /kg2 die universelle Gravitationskonstante.
Offenbar handelt es sich bei (1.297) um eine Zentralkraft in der Form (1.274), wobei
man identifiziert
Mm
k
f (r) = Γ 2 = 2 ,
mit k = ΓM m.
(1.298)
r
r
Zentralbewegungen unter dem Einfluß dieser Kraft heißen Kepler-Bewegungen.
Zur Berechnung des zugehörigen Potentials nach (1.275) legen wir den Bezugsradius
r0 ins Unendliche und setzen dort das Potential V0 auf Null:
Zr
V (r) =
Zr
f (r̃) dr̃ = k
∞
∞
1
dr̃
r̃2
k
⇒ V (r) = − .
r
(1.299)
Bahnkurven
Wegen
k
⇒ f (1/ξ) = k ξ 2
2
r
lautet die Differentialgleichung der Bahn (1.296)
f (r) =
(1.300)
km
d2 ξ
+
ξ
=
;
dϕ2
L2
(1.301)
61
1 Punktmechanik
ist für Kepler-Bewegungen also linear. Der homogene Anteil hat die allgemeine
Lösung
ξh (ϕ) = a cos(ϕ − ϕ0 ),
(1.302)
und eine partikuläre Lösung der inhomogenen Gleichung ist offensichtlich
ξp (ϕ) ≡
km
,
L2
(1.303)
so daß die allgemeine Lösung lautet:
km
ξ(ϕ) = 2 {1 + ε cos(ϕ − ϕ0 )}
L
Ã
!
L2
ε=a
.
km
(1.304)
a bzw. ε und ϕ0 sind dabei frei wählbare Integrationskonstanten. Legt man das
Koordinatensystem so, daß ϕ0 = 0 ist, und definiert weiterhin die Abkürzung
p=
L2
,
km
(1.305)
so folgt
ξ(ϕ) =
1
{1 + ε cos ϕ} .
p
(1.306)
Mit r = 1/ξ haben die Bahnen der Kepler-Bewegung also die Form
r(ϕ) =
p
.
1 + ε cos ϕ
(1.307)
Das ist die Normalform für Kegelschnitte in Polarkoordinaten mit einem Brennpunkt
im Ursprung (siehe z. B. Bronstein). Dabei sind p der Halbparameter und ε die
Exzentrizität. Die Kurven klassifizieren sich wie folgt (Abb. 1.30):
ε=0
0<ε<1
ε=1
ε>1
:
:
:
:
Kreis,
Ellipse,
Parabel,
Hyperbel.
(1.308)
Wir haben somit das Erste Keplersche Gesetz erhalten:
Die Bahnkurve eines Massenpunktes in einer Kepler-Bewegung ist ein
Kegelschnitt, dessen einer Brennpunkt mit dem Kraftzentrum zusammenfällt.
Die physikalische Bedeutung des Halbparameters p ist in (1.305) gegeben. Die Bedeutung der Exzentrizität ε folgt aus dem Energiesatz
E=
62
m 2
L2
k
ṙ +
− .
2
2
2mr
r
(1.309)
1.7 Zentralbewegung
Abbildung 1.30: Klassifikation der Kegelschnitte.
63
1 Punktmechanik
Im Scheitelpunkt ϕ = 0 ist nach (1.307)
p
L2
=
,
1+ε
km (1 + ε)
r=
ṙ =
dr
pε sin ϕ
ϕ̇ =
ϕ̇ = 0,
dϕ
(1 + ε cos ϕ)2
(1.310)
und somit
L2 k 2 m2 (1 + ε)2 mk 2
− 2 (1 + ε)
2m
L4
L
2 ³
´
´
mk
mk 2 ³ 2
2
=
1
+
2ε
+
ε
−
2
−
2ε
=
ε
−
1
.
2L2
2L2
E =
(1.311)
Nach ε aufgelöst ergibt das
s
ε=
1+
2EL2
,
mk 2
(1.312)
wobei aus der Forderung nach nicht-negativem Radikanden eine Nebenbedingung
minimaler Energie folgt:
E ≥ Emin = −
mk 2
.
2L2
(1.313)
In Abhängigkeit von Energie und Drehimpuls ergeben sich also folgende Bahnen:
E = Emin
Emin < E < 0
E=0
E>0
:
ε=0
: 0<ε<1
:
ε=1
:
ε>1
→
→
→
→
Kreis,
Ellipse,
Parabel,
Hyperbel.
(1.314)
Für E < 0 (negative Gesamtenergie) ergeben sich also gebundene Bewegungen
(Kreis, Ellipse), für E ≥ 0 (Gesamtenergie positiv oder Null) freie Bewegungen
(Parabel, Hyperbel). Man kann sich das auch gut mit dem effektiven Potential Veff
des äquivalenten eindimensionalen Problems (1.288) veranschaulichen. Es hat für
Kepler-Bewegungen die Form
L2
k
Veff (r) = − +
r 2mr2
(1.315)
und ist in Abb. 1.31 mit den verschiedenen Bahntypen dargestellt.
Wir beweisen nun noch das Dritte Keplersche Gesetz:
Gegeben sei als Kraftzentrum ein fester Massenpunkt der Masse M .
Dann verhalten sich für alle Massenpunkte beliebiger Masse m auf elliptischen Bahnen die Quadrate der Umlaufzeiten wie die dritten Potenzen
der großen Halbachsen.
64
1.7 Zentralbewegung
Abbildung 1.31: Effektives Potential des Kepler-Problems.
Beweis:
Die Umlaufzeit T kann aus Fläche und Flächengeschwindigkeit berechnet werden:
Ȧ =
A
T
⇒
T =
A
.
Ȧ
(1.316)
Die Flächengeschwindigkeit ist nach (1.284)
Ȧ =
L
,
2m
(1.317)
und die Fläche einer Ellipse berechnet sich gemäß
A = πab,
(1.318)
wobei a und b die große bzw. kleine Halbachse bedeuten. Weiterhin gilt für Ellipsen
der Zusammenhang (Bronstein)
p=
b2
.
a
(1.319)
Es folgt
T =
2π ma3/2 [L/(km)1/2 ]
2π m1/2 a3/2
πa (ap)1/2
=
=
L/2m
L
k 1/2
T2
4π 2 m
4π 2 m
4π 2
=
=
=
= const,
a3
k
ΓM m
ΓM
was zu zeigen war.
⇒
(1.320)
Es sei angemerkt, daß die Gültigkeit des Ersten und Dritten Keplerschen Gesetzes
auf Kepler-Bewegungen beschränkt ist, wohingegen das Zweite Keplersche Gesetz
(Flächensatz) für beliebige Zentralbewegungen erfüllt ist.
65
1 Punktmechanik
1.7.5 Das Zweikörperproblem
Im vorigen Abschnitt haben wir angenommen, daß ein fixiertes Kraftzentrum in
Form des Massenpunktes mit der Masse M existiert. Diese Situation ist in Wirklichkeit natürlich nicht gegeben, sondern man hat es mit zwei frei beweglichen Massen
M und m zu tun, die sich gegenseitig anziehen.
Abbildung 1.32: Zum Zweikörperproblem.
Wir betrachten nun ein System aus zwei Massenpunkten {P1 , P2 } mit den Massen
M und m (Bild 1.32). Bezeichnet man den Verbindungsvektor von P1 nach P2 mit
ξ, dann lautet das Newtonsche Gravitationsgesetz für die Kraft auf P2
Mm
F = −Γ 2 eξ ;
(1.321)
ξ
die Kraft auf P1 ist nach dem Prinzip actio = reactio gleich −F .
Die Bewegungsgleichungen für die beiden Massenpunkte lauten daher
M Ẍ = −F ,
mẍ = F ,
und es folgt
µ
(1.322)
¶
1
1
ξ̈ = ẍ − Ẍ = F
+
.
m M
Definiert man die reduzierte Masse µ als
Mm
1
1
1
µ=
⇔
=
+ ,
M +m
µ
m M
folgt weiter
F = µξ̈
(1.323)
(1.324)
(1.325)
als Bewegungsgleichung der Relativbewegung zwischen den beiden Massenpunkten.
Setzt man das Newtonsche Gravitationsgesetz (1.321) hier ein, ergibt sich
µξ̈ = −Γ
Mm
eξ
ξ2
⇒ mξ̈ = −Γ
66
(M + m) m
eξ .
ξ2
(1.326)
1.7 Zentralbewegung
Das entspricht der Bewegungsgleichung der Kepler-Bewegung bei fixiertem Kraftzentrum, es ist lediglich ersetzt
M → M + m,
bzw.
k = ΓM m → k 0 = Γ(M + m) m.
(1.327)
Somit behalten das Erste und Zweite Keplersche Gesetz ihre Gültigkeit. Für die
Umlaufzeit erhält man jedoch entsprechend (1.320)
4π 2
T2
4π 2
1
=
=
·
.
3
a
Γ(M + m)
ΓM 1 + m/M
(1.328)
Das Verhältnis T 2 /a3 ist also bei festem M nicht mehr konstant, sondern hängt auch
von der Masse m des zweiten Massenpunktes ab. Für die Bahnen der Planeten um
die Sonne gilt allerdings stets m/M ¿ 1, so daß das Dritte Keplersche Gesetz in
guter Näherung immer noch richtig ist.
67
2 Mechanik von Punktsystemen und
starren Körpern
2.1 Mechanik der Punktsysteme
2.1.1 Eigenschaften von Punktsystemen
Systeme von Massenpunkten, oder kurz Punktsysteme, haben wir bereits in §1.4
kennengelernt. Zur Erinnerung: Bei einem Punktsystem handelt es sich um eine
Menge von n Massenpunkten {Pi , i = 1, . . . , n} mit den zugehörigen Massen mi ,
Geschwindigkeiten v i und Impulsen pi = mi v i . Für die Gesamtmasse M bzw. den
Gesamtimpuls P des Punktsystems gilt
M =
P =
n
X
i=1
n
X
mi ,
pi =
i=1
(2.1)
n
X
mi v i .
(2.2)
i=1
Der Massenmittelpunkt xcm und die Massenmittelpunktsgeschwindigkeit v cm sind
definiert als
xcm
n
1 X
mi xi ,
=
M i=1
(2.3)
n
1 X
mi v i ,
M i=1
(2.4)
v cm =
und es folgt für den Gesamtimpuls
P = M v cm .
(2.5)
Der Gesamtimpuls ist also gleich der Gesamtmasse mal der Massenmittelpunktsgeschwindigkeit.
In einem Punktsystem ist die Bewegung der einzelnen Massenpunkte im Prinzip
frei. D. h., bei einer räumlichen Bewegung ist die Anzahl der unabhängigen Lagekoordinaten (“Freiheitsgrade”) des Punktsystems gleich 3n, wenn n die Anzahl der
Massenpunkte ist.
Zwangsbedingungen können die Anzahl der Freiheitsgrade einschränken. Zum Beispiel kann die Bewegung einzelner oder aller Massenpunkte auf eine Ebene oder auf
68
2.1 Mechanik der Punktsysteme
eine Raumkurve beschränkt sein. Eine andere Möglichkeit ist, daß alle Massenpunkte starr untereinander verbunden sind, so daß für beliebige Paare von Massenpunkten deren Abstand zeitlich konstant bleibt. In diesem Fall spricht man von starren
Punktsystemen.
Wieviele Freiheitsgrade hat ein starres Punktsystem? Wir setzen voraus, daß dieses eine Teilmenge von drei Massenpunkten P1 , P2 , P3 enthält, die nicht auf einer
Geraden liegen. Dann ist die Lage aller übrigen Massenpunkte durch die Zwangsbedingung konstanter Abstände von P1 , P2 und P3 bestimmt, siehe Bild 2.1 links.
Die Anzahl der Freiheitsgrade kann somit nicht größer als diejenige von drei Massenpunkten, also neun, sein. Jedoch sind auch P1 , P2 , P3 nicht unabhängig, sondern
unterliegen den drei Zwangsbedingungen
r12 = const,
r13 = const,
r23 = const.
(2.6)
Folglich ist die Anzahl der Freiheitsgrade eines starren Punktsystems gleich sechs1 .
Diese Überlegung gilt auch dann noch, wenn man den Grenzfall n → ∞, also ein
materielles Kontinuum betrachtet, das der Starrheitsbedingung unterliegt (“starrer
Körper”, Bild 2.1 rechts).
Abbildung 2.1: Starres Punktsystem, starrer Körper.
2.1.2 Impuls- und Drehimpulssatz
Der Impulssatz für ein System von Massenpunkten wurde ebenfalls bereits in §1.4
behandelt. Teilt man die Gesamtkraft F i auf den Massenpunkt Pi in eine externe
und die Wechselwirkungskräfte F ij mit den anderen Massenpunkten
Kraft F ext
i
j = 1 . . . n, j 6= i, des Systems auf, so lautet der Impulssatz für Pi
n
X
j=1
j6=i
F ij + F ext
=
i
dpi
= mi ai .
dt
(2.7)
Der Impulssatz für das gesamte Punktsystem folgt durch Summation über alle Massenpunkte, wobei wegen actio = reactio die Doppelsumme über die Wechselwir1
Falls alle Massenpunkte eines starren Punktsystems mit n ≥ 2 auf einer Geraden liegen, reduziert
sich die Anzahl der Freiheitsgrade auf fünf.
69
2 Punktsysteme und starre Körper
kungskräfte verschwindet:
n
n X
X
i=1
⇒ F
F ij +
j=1
j6=i
ext
=
n
X
n
X
F ext
=
i
n
X
dpi
dt
i=1
i=1
F ext
=
i
dP
= M acm .
dt
i=1
(2.8)
Dabei ist F ext die gesamte, auf das Punktsystem wirkende äußere Kraft.
Der Drehimpulssatz (Drallsatz) für den Massenpunkt Pi bezüglich des festen Aufpunktes x0 lautet (vgl. Gl. (1.281))
dLi
= M i,
dt
(2.9)
wobei
Li = (xi − x0 ) × pi ,
Mi
n
X
= (xi − x0 ) × F i = (xi − x0 ) × F ij + F ext
i
(2.10)
j=1
j6=i
=
n ³
X
j=1 |
j6=i
(xi − x0 ) × F ij
{z
´
}
+ (xi − x0 ) × F ext
i .
|
M ij
{z
}
(2.11)
M ext
i
Analog zu F i erscheint auch M i aufgeteilt in ein externes Moment M ext
und Wechi
selwirkungsmomente M ij mit den anderen Massenpunkten des Systems.
Für den Gesamtdrehimpuls
L=
n
X
Li
(2.12)
i=1
des Punktsystems ergibt sich durch Aufsummieren von (2.9)
n
n
n X
n
X
X
dL X
M ij +
M ext
=
Mi =
i .
dt
i=1
i=1
i=1 j=1
(2.13)
j6=i
Die Doppelsumme setzt sich zusammen aus Paaren M ij + M ji . Diese haben wegen
actio = reactio die Form
M ij + M ji = (xi − x0 ) × F ij + (xj − x0 ) × F ji
= (xi − x0 ) × F ij − (xj − x0 ) × F ij
= (xi − xj ) × F ij .
70
(2.14)
2.1 Mechanik der Punktsysteme
Dabei ist xi − xj der Verbindungsvektor von Pj nach Pi . Sofern nicht explizit anders
erwähnt, beschränken wir uns im folgenden auf Systeme, bei denen die Wechselwirkungskraft F ij längs diesem Verbindungsvektor wirkt2 (vgl. §1.4.3). Dann verschwindet das Kreuzprodukt in (2.14), somit auch die Doppelsumme in (2.13), und
es verbleibt
n
dL X
=
M ext
= M ext .
(2.15)
i
dt
i=1
Diese Gleichung stellt die Bilanz des Drehimpulses (Drehimpulssatz, Drallsatz) für
ein Punktsystem dar. Sie stellt fest, daß bezüglich eines beliebigen, fest gewählten
Aufpunktes x0 die zeitliche Änderung des Gesamtdrehimpulses gleich dem äußeren
Drehmoment M ext ist; innere Wechselwirkungen tragen nichts bei.
Gl. (2.5) sagt aus, daß der gesamte Impuls eines Systems gleich dem Impuls des
Massenzentrums ist. Für den Drehimpuls sind die Verhältnisse etwas komplizierter.
Setzt man gemäß Abb. 2.2
xi = xcm + x0i ,
(2.16)
v i = v cm + v 0i ,
so erhält man für die gestrichenen Relativgrößen die Beziehungen
M xcm =
n
X
mi xi =
i=1
⇒
n
X
mi x0i = 0,
i=1
n
X
mi xcm +
i=1
n
X
n
X
mi x0i = M xcm +
i=1
n
X
mi x0i
i=1
mi v 0i = 0.
(2.17)
i=1
Abbildung 2.2: Zum Drehimpuls eines Punktsystems.
Hiermit rechnet man für den Gesamtdrehimpuls
L =
=
n
X
i=1
n
X
(xi − x0 ) × mi v i
(xcm − x0 + x0i ) × (mi v cm + mi v 0i )
i=1
=
n
X
(xcm − x0 ) × mi v cm +
i=1
+
n
X
i=1
2
n
X
(xcm − x0 ) × mi v 0i
i=1
mi x0i × v cm +
n
X
x0i × mi v 0i
i=1
Diese Regel ist nicht allgemeingültig. Beispielsweise ist sie für die elektromagnetischen Kräfte
zwischen bewegten Ladungen nicht mehr erfüllt.
71
2 Punktsysteme und starre Körper
⇒
L = (xcm − x0 ) × M v cm +
|
{z
n
X
x0i × mi v 0i .
i=1
}
{z
|
Lcm
(2.18)
}
0
L
Der Gesamtdrehimpuls L eines Systems bezüglich x0 ist also gleich dem Drehimpuls
Lcm des Massenzentrums bezüglich x0 plus dem Drehimpuls L0 der Bewegung um
das Massenzentrum (“Eigendrehimpuls”).
In ähnlicher Weise gilt für das äußere Drehmoment
M ext =
n
X
(xi − x0 ) × F ext
i
i=1
=
=
n
X
(xcm − x0 + x0i ) × F ext
i
i=1
n
X
(xcm − x0 ) × F ext
i +
i=1
x0i × F ext
i
i=1
= (xcm − x0 ) × F ext +
|
n
X
{z
M ext
cm
}
n
X
x0i × F ext
i ;
i=1
|
{z
(2.19)
}
0 ext
(M )
dieses setzt sich somit zusammen aus dem Moment M ext
cm der gesamten äußeren
Kraft auf das Massenzentrum bezüglich x0 und dem Moment (M 0 )ext der äußeren
Kräfte bezüglich des Massenzentrums.
Durch Einsetzen von (2.18) und (2.19) in den Drallsatz (2.15) erhält man
dLcm dL0
0 ext
+
= M ext
cm + (M )
dt
dt
⇒
´
dL0
d³
+
(xcm − x0 ) × M v cm = (M 0 )ext + (xcm − x0 ) × F ext
dt
dt
⇒
dL0
+ v cm × M v cm + (xcm − x0 ) × M acm = (M 0 )ext + (xcm − x0 ) × F ext
dt
⇒
³
´
dL0
= (M 0 )ext + (xcm − x0 ) × F ext − M acm
dt
dL0
= (M 0 )ext
(2.20)
dt
(im letzten Schritt wurde der Impulssatz (2.8) verwendet). Das ist der aufpunktunabhängige Drehimpulssatz bezogen auf den Massenmittelpunkt. Er hat die gleiche
Form wie der auf einen festen Aufpunkt x0 bezogene Drehimpulssatz (2.15), gilt
jedoch bei beliebig bewegtem Massenmittelpunkt.
⇒
2.1.3 Energiesatz
Zur Herleitung des Energiesatzes für Punktsysteme gehen wir ähnlich vor wie in
§1.5.1 beim Energiesatz für einen Massenpunkt: Skalare Multiplikation des Impuls-
72
2.1 Mechanik der Punktsysteme
satzes für den Massenpunkt Pi (Gl. (2.7)) mit ẋi liefert zunächst
n
X
µ
F ij · ẋi + F ext
i · ẋi = mi ẋi · ẍi =
j=1
j6=i
¶
d mi 2
ẋ .
dt 2 i
(2.21)
Durch Summation über die Massenpunkte des Systems folgt weiter
n X
n
X
i=1
F ij · ẋi +
n
X
µ
F ext
i
i=1
j=1
j6=i
¶
n
d X
mi 2
· ẋi =
ẋ .
dt i=1 2 i
(2.22)
In Analogie zu §1.5.1 definieren wir
Lint :=
n X
n
X
i=1
Lext :=
F ij · v i
(“innere Leistung”),
j=1
j6=i
n
X
F ext
i · vi
(“äußere Leistung”),
(2.23)
i=1
T :=
n µ
X
mi
2
i=1
¶
v 2i
(“kinetische Energie”),
und erhalten somit
Ṫ = Lint + Lext
(2.24)
als Bilanz der kinetischen Energie für Punktsysteme.
Die integrierte Form davon ist der Energiesatz für Punktsysteme:
Zt2
Zt2
int
T2 − T1 =
L
Lext dt = W int + W ext .
dt +
t1
(2.25)
t1
Dabei gilt für die kinetische Energie mit der Zerlegung (2.16) und den resultierenden
Beziehungen (2.17)
T =
=
n µ
X
mi
i=1
n µ
X
i=1
⇒
2
¶
(v cm + v 0i )2
¶
n
X
mi 2
02
(v cm + v i ) + v cm
mi v 0i
2
i=1
¶
n µ
X
mi 02
M 2
v +
v .
T =
2 cm
2 i
i=1
| {z }
Tcm
|
{z
T
(2.26)
}
0
Ähnlich wie für den Drehimpuls existiert auch für die kinetische Energie eine Aufteilung in die kinetische Energie des Massenzentrums und die kinetische Energie der
Bewegung um das Massenzentrum.
Da die Wechselwirkungskräfte F ij nur längs der Verbindung von xi nach xj wirken
sollen, müssen sie eine Darstellung der Form
xi − xj
xi − xj
= −fij
(2.27)
F ij = −fij
|xi − xj |
rij
73
2 Punktsysteme und starre Körper
besitzen, wobei fij eine skalarwertige Funktion ist (vgl. Zentralkraft (1.274)). Damit
und mit actio = reactio erhält man für die innere Leistung Lint
Lint =
n X
i−1
X
(F ij · v i + F ji · v j )
i=1 j=1
=
n X
i−1
X
F ij · (v i − v j )
i=1 j=1
= −
n X
i−1
X
fij
xi − xj
· (v i − v j )
rij
fij
drij
.
dt
i=1 j=1
= −
n X
i−1
X
i=1 j=1
(2.28)
Den letzten Schritt macht man sich durch Ausdifferenzieren von
½
i1/2 ¾
drij
d h
(xi − xj )2 + (yi − yj )2 + (zi − zj )2
=
dt
dt
nach der Kettenregel klar. Die innere Leistung verschwindet also im allgemeinen
nicht. Sie ist aber dann Null, wenn sich die Abstände der Teilchen voneinander im
Lauf der Zeit nicht ändern, mit anderen Worten bei starren Systemen.
Konservative Kräfte
Wir betrachten nun den Fall, daß sowohl die äußeren als auch die inneren Kräfte
konservativ sind, also ein Potential besitzen. Für die äußeren Kräfte heißt das
F ext
= −grad i Vi (xi ),
i
(2.29)
wobei “grad i ” Differentiation nach den Komponenten des Ortsvektors xi meint. Für
die inneren Kräfte zwischen Pi und Pj ist
F ij = −grad i Vij (rij ).
(2.30)
Daß das Wechselwirkungspotential nur vom Abstand rij abhängen kann, sieht man
daran, daß diese Form genau auf die Darstellung (2.27) führt, welche für innere
Kräfte gelten muß:
dVij
1
dVij
· grad i rij = −
·
· 2(xi − xj )
drij
drij 2rij
dVij xi − xj
= −
.
drij
rij
F ij = −
(2.31)
Man identifiziert also
fij = fij (rij ) =
74
dVij (rij )
drij
(2.32)
2.2 Mechanik der starren Körper
und sieht daran ferner, daß der Betrag einer konservativen innere Kraft nur vom
Abstand der Teilchen rij abhängen darf.
Die Arbeit der äußeren Kräfte berechnet sich nun gemäß
(x )
n Zi 2
X
t2
W
ext
=
n Z
X
F ext
i
· v i dt =
i=1 t1
= −
i=1(x )
i 1
(x )
n Zi 2
X
grad i Vi · dxi = −
i=1(x )
i 1
=
F ext
i · dxi
(x )
n Zi 2
X
dVi
i=1(x )
i 1
n
X
n
X
i=1
i=1
(Vi )1 −
(Vi )2 ,
(2.33)
und die Arbeit der inneren Kräfte ist
t2
W
int
= −
n X
i−1 Z
X
i=1 j=1 t1
= −
n X
i−1
X
(r )
n X
i−1 Zij 2
X
drij
dt = −
fij
fij drij
dt
i=1 j=1
i=1 j=1(r )
ij 1
=
n X
i−1
X
(rij )1
(rZij )2
(r )
n X
i−1 Zij 2
X
dVij
drij = −
dVij
drij
i=1 j=1
(rij )1
(Vij )1 −
i=1 j=1
n X
i−1
X
(Vij )2 .
(2.34)
i=1 j=1
Wir definieren nun eine totale potentielle Energie V des Systems,
V =
n
X
i=1
Vi +
n X
i−1
X
Vij ,
(2.35)
i=1 j=1
und sehen, daß hiermit aus dem allgemeinen Energiesatz (2.25) die Beziehung
T1 + V 1 = T2 + V 2
⇐⇒
T + V = E = const
(2.36)
folgt. Das ist der Energieerhaltungssatz für Punktsysteme.
Der zweite Term auf der rechten Seite von (2.35) stellt die innere potentielle Energie
dar; sie kann sich im allgemeinen im Lauf der Zeit ändern. Für starre Systeme mit
rij = const sind jedoch alle Vij konstant (da nur von rij abhängig), und folglich ist
auch die innere potentielle Energie zeitlich konstant. Da die totale potentielle Energie
sowiese nur bis auf eine additive Konstante bestimmt ist, kann bei der Diskussion
von starren Systemen die innere potentielle Energie ignoriert werden.
2.2 Mechanik der starren Körper
2.2.1 Die Begriffe “Körper” und “starrer Körper”
Bisher haben wir uns immer mit Massenpunkten oder Systemen von Massenpunkten befaßt, also mit einer endlichen Anzahl von punktförmigen massebehafteten
75
2 Punktsysteme und starre Körper
Teilchen. Im Gegensatz dazu versteht man unter einem Körper ein materielles Kontinuum, also einen zusammenhängenden Bereich im dreidimensionalen Raum IR3 ,
welcher mit kontinuierlich verteilter Materie der (Massen-)Dichte
ρ(x, t) =
lim
∆V (t)→0
x∈∆V (t)
∆m(t)
∆V (t)
(2.37)
ausgefüllt ist.
Es macht also bei Körpern keinen Sinn, von Massen mi der Punkte Pi zu sprechen;
an deren Stelle tritt das Feld der Dichte. Ebenso wird die Geschwindigkeit eine
Feldgröße,
v = v(x, t),
(2.38)
die Impulse sind zu ersetzen durch das Feld der Impulsdichte (Impuls pro Volumen),
pi = mi v i
→
ρ(x, t)v(x, t),
und analog die Drehimpulse durch die Drehimpulsdichte,
Li = (xi − x0 ) × mi v i
→
(x − x0 ) × ρ(x, t)v(x, t).
Dem Aufsummieren der einzelnen Massen, Impulse und Drehimpulse zur Gesamtmasse, zum Gesamtimpuls und zum Gesamtdrehimpuls bei Punktsystemen entspricht bei Körpern die Integration der entsprechenden Feldgrößen über das eingenommene Volumen V :
Z
M (t) =
V
ρ(x, t) dV,
Z
P (t) =
V
ρ(x, t)v(x, t) dV,
(2.39)
Z
L(t) =
V
(x − x0 ) × ρ(x, t)v(x, t) dV.
Die allgemeine Theorie der Bewegung derartiger kontinuierlicher Körper (welche
nicht Gegenstand dieses Skriptes ist) heißt Kontinuumsmechanik.
In Analogie zu den starren Punktsystemen definiert man einen starren Körper als
einen Körper, für den der Abstand zweier beliebiger materieller Elemente zeitlich konstant ist. Während die Anzahl der Freiheitsgrade bei allgemeinen Körpern
überabzählbar unendlich groß ist, beträgt sie bei starren Körpern, wie wir uns bereits
früher überlegt haben, lediglich sechs.
76
2.2 Mechanik der starren Körper
2.2.2 Kinematik starrer Körper
Allgemeine Bewegung und Eulersches Theorem
Gemäß Abb. 2.3 betrachten wir zur kinematischen Beschreibung der Bewegung von
starren Körpern ein beliebiges Bezugssystem im Raum {O, ei } sowie ein körperfestes
Bezugssystem {P0 , e?i }. Dabei bedeutet körperfest, daß sowohl der Ursprung P0 als
auch die Achsen e?i materiell sind, sie sich also mit den materiellen Teilchen des
starren Körpers mitbewegen. Aufgrund der vorausgesetzten Starrheit folgt, daß
• die Achsen des körperfesten Bezugssystems ihre Orthogonalität während der
Bewegung beibehalten,
• keine Bewegung der materiellen Punkte relativ zu dem körperfesten Bezugssystem möglich ist:
v ? (x? , t) ≡ 0.
(2.40)
Abbildung 2.3: Bewegung eines starren Körpers.
Bezeichnet man den Ortsvektor und die Geschwindigkeit des Punktes P0 mit x0
bzw. v 0 , dann gilt nach dem Hauptsatz der Kinematik der Relativbewegung (§1.4.7,
Gl. (1.158)) unter Verwendung von (2.40) für jeden Punkt des starren Körpers
v(x? , t) = v 0 (t) + ω(t) × x? .
(2.41)
Die Bewegung eines starren Körpers setzt sich also zu jedem beliebigen Zeitpunkt
zusammen aus
• einer Translation des beliebigen, fest gewählten materiellen Punktes P0 mit
der Geschwindigkeit v 0 (t),
• und einer Rotation um eine durch diesen Punkt gehende Achse mit der Winkelgeschwindigkeit ω(t).
Der Bewegungszustand ist also zu jedem Zeitpunkt durch das Paar (v 0 (t), ω(t)),
welches auch als Kinemate bezeichnet wird, eindeutig beschrieben. Die Winkelgeschwindigkeit ω(t) ist im übrigen von der speziellen Wahl des Bezugspunktes P0
77
2 Punktsysteme und starre Körper
unabhängig, da das gesternte, körperfeste Koordinatensystem unabhängig von seinem Nullpunkt im starren Körper immer dieselbe Drehung ausführt. Eine natürliche,
häufig getroffene Wahl für P0 ist das Massenzentrum des betreffenden Körpers.
Ein Spezialfall dieser Ergebnisse ist das Eulersche Theorem:
Die allgemeine Bewegung eines starren Körpers, von dem ein Punkt festgehalten wird, ist eine Drehung um eine Achse (welche zeitlich veränderlich sein kann).
Eulersche Winkel
Die Aufteilung (2.41) zeigt, daß die sechs Freiheitsgrade des starren Körpers sinnvollerweise als drei Freiheitsgrade der Translation von P0 und drei Freiheitsgrade der
Rotation um P0 dargestellt werden können. Die unabhängigen Lagekoordinaten der
Translation sind zum Beispiel die kartesischen Koordinaten von x0 im ungesternten
System, x0 , y0 und z0 . Dagegen ist es nicht ganz trivial, drei geeignete unabhängige
Lagekoordinaten für die Rotation zu finden.
Es gibt hierfür diverse Ansätze; wir beschränken uns auf die in diesem Zusammenhang am häufigsten verwendeten Eulerschen Winkel ϕ, θ, ψ. Diese beschreiben die
Drehung des räumlichen Bezugssystems {O, ei } auf das körperfeste Bezugssystem
{P0 , e?i } durch drei aufeinanderfolgende Drehungen (Abb. 2.4):
1. Drehung des ursprünglichen Achsensystems xyz um den Winkel ϕ um die zAchse auf das erste Zwischensystem ξηζ. Die dabei erhaltene ξ-Achse ist die
Schnittgerade der xy- mit der x? y ? -Ebene und wird als Knotenlinie bezeichnet.
2. Drehung des ξηζ-Systems um den Winkel θ um die ξ-Achse (Knotenlinie) auf
das zweite Zwischensystem ξ ? η ? ζ ? .
3. Drehung des ξ ? η ? ζ ? -Systems um den Winkel ψ um die ζ ? -Achse. Es entsteht
das gewünschte x? y ? z ? -System.
Die so definierten Eulerschen Winkel legen die Verdrehung des x? y ? z ? -Systems relativ zum xyz-System eindeutig fest und können deshalb als die drei unabhängigen
Lagekoordinaten für den Rotationsanteil der Starrkörperbewegung dienen. Für einen
beliebigen, fest gewählten materiellen Punkt P0 ist somit die Starrkörperbewegung
relativ zum Bezugssystem {O, ei } (xyz-System) durch die sechs unabhängigen Zeitfunktionen
x0 (t), y0 (t), z0 (t), ϕ(t), θ(t), ψ(t)
vollständig beschrieben.
Drehimpuls und kinetische Energie
Wir berechnen nun den Drehimpuls eines starren Körpers bezüglich des materiellen
Punktes P0 . Dann ist v 0 ≡ 0 und somit
v = ω × x? .
78
(2.42)
2.2 Mechanik der starren Körper
Abbildung 2.4: Eulersche Winkel.
79
2 Punktsysteme und starre Körper
Des weiteren gilt
x − x0 = x? .
(2.43)
?
?
Aus (2.39) folgt mit r = |x |
Z
L =
=
=
V
x? × ρ (ω × x? ) dV ?
Z ³
V
Z ³
V
´
ρω (x? · x? ) − ρx? (x? · ω) dV ?
´
ρωr?2 − ρx? (x? · ω) dV ? ,
bzw. in Komponenten
Z
Z
?2
Li =
V
Z
V
·Z
=
|
?
ρωi r dV −
= ωi
V
ρx?i (x?j ωj ) dV ?
Z
ρr?2 dV ? − ωj
³
V
(2.44)
V
´
ρx?i x?j dV ?
¸
ρ r?2 δij − x?i x?j dV ? ωj .
{z
(2.45)
}
Iij
Man erkennt, daß zwischen der Winkelgeschwindigkeit ω und dem Drehimpuls L
bezüglich P0 ein linearer Zusammenhang besteht. Symbolisch läßt sich das als
L = Iω
(2.46)
darstellen, wobei die Transformationsmatrix I als Trägheitstensor bekannt ist; ihre
Komponenten Iij sind durch (2.45) definiert und nur von der Geometrie des jeweiligen Starrkörpers abhängig. Ganz offensichtlich ist I symmetrisch:
I = IT ,
bzw. Iij = Iji .
(2.47)
Für die kinetische Energie der Bewegung um P0 findet man
Z
T =
V
Z
Z
ρv 2
ρ
ρ
dV ? =
(ω × x? ) · v dV ? =
ω · (x? × v) dV ?
2
V 2
V 2
ω Z
ω·L
=
· (x? × ρv) dV ? =
2 V
2
ω · Iω
.
(2.48)
⇒ T =
2
Sei n der Einheitsvektor in Richtung von ω, also ω = ωn, kann man das weiter
umformen zu
ω2
In 2
T =
n · In =
ω ,
(2.49)
2
2
wobei
Z
In = n · In =
³
V
´
ρ r?2 − (x? · n)2 dV ?
das Trägheitsmoment des betreffenden starren Körpers um die Achse n ist.
80
(2.50)
2.2 Mechanik der starren Körper
Hauptachsen des Trägheitstensors
In Gl. (2.47) haben wir die Symmetrie des Trägheitstensors I notiert. Aus der linearen Algebra ist bekannt, daß dann bei unverändertem Ursprung P0 eine spezielle
Orientierung der Körperachsen e?i existiert, für die I Diagonalgestalt hat (“Hauptachsensystem”):
I1 0 0
I = 0 I2 0 .
0 0 I3
(2.51)
Somit resultieren in Hauptachsen die einfachen Beziehungen
Lx = I1 ωx ,
T =
Ly = I2 ωy ,
Lz = I3 ωz ,
(2.52)
I1 2 I2 2 I3 2
ω + ωy + ωz .
2 x
2
2
(2.53)
Letzteres kann man auch in der Form
s
Ã
ωx2 ωy2 ωz2
+ 2 + 2 =1
a2
b
c
a=
2T
,
I1
s
b=
2T
,
I2
s
c=
2T
I3
!
(2.54)
schreiben. Bei gegebener kinetischer Energie T entspricht das der Gleichung eines
Ellipsoids im ω-Raum mit den Halbachsen a, b, c (“Trägheitsellipsoid”, Abb. 2.5).
Abbildung 2.5: Trägheitsellipsoid.
Steinerscher Satz
In Analogie zu (2.3), (2.4) gilt in kontinuierlichen Körpern für den Massenmittelpunkt und dessen Geschwindigkeit
1 Z
ρx dV,
M V
1 Z
=
ρv dV.
M V
xcm =
(2.55)
v cm
(2.56)
81
2 Punktsysteme und starre Körper
Wir führen nun in Gl. (2.45), welche die Komponenten des Trägheitstensors angibt,
eine Aufteilung des Ortsvektors x? bezüglich P0 in den Ortsvektor des Massenzentrums x?cm bezüglich P0 und den Ortsvektor x0 bezüglich des Massenzentrums ein
(Abb. 2.6, vgl. Gl. (2.16)):
x? = x?cm + x0 .
(2.57)
Abbildung 2.6: Zum Steinerschen Satz.
Entsprechend Gl. (2.17) folgt dann
Z
V
ρx0 dV = 0.
(2.58)
Durch Einsetzen von (2.57) in (2.45) ergibt sich unter Verwendung von (2.58)
Z
Iij =
V
n
Z
=
V
o
ρ (x?cm + x0 )2 δij − [(x?cm )i + x0i ][(x?cm )j + x0j ] dV 0
n
?2
ρ rcm
δij + r02 δij + 2x?cm · x0 δij
o
−(x?cm )i (x?cm )j − x0i x0j − (x?cm )i x0j − (x?cm )j x0i dV 0
³
?2
= M rcm
δij − (x?cm )i (x?cm )j
|
{z
´
}
Z
+
|
V
(Icm )ij
³
´
ρ r02 δij − x0i x0j dV 0 ,
{z
(2.59)
}
Iij0
oder in symbolischer Notation
I = I cm + I 0 .
(2.60)
Das ist der Steinersche (Trägheits-) Satz: Der Trägheitstensor I bezüglich eines beliebigen Punktes P0 ist gleich dem Trägheitstensor I cm des Massenzentrums bezüglich
P0 plus dem Trägheitstensor I 0 bezüglich des Massenzentrums.
In Hauptachsen nimmt der Steinersche Satz die folgende einfache Form an:
?2
?2
) + I10 = M d2x + I10 ,
+ zcm
I1 = M (ycm
?2
0
2
0
I2 = M (x?2
cm + zcm ) + I2 = M dy + I2 ,
(2.61)
?2
0
2
0
I3 = M (x?2
cm + ycm ) + I3 = M dz + I3 ,
?2 1/2
?2
) den Abstand in x? -Richtung des Punktes P0 vom Massen+ zcm
wobei dx = (ycm
zentrum bedeutet (dy , dz entsprechend).
82
2.2 Mechanik der starren Körper
2.2.3 Dynamik starrer Körper
Reduktion von Kraftsystemen
Eine Einzelkraft, die auf ein Punktsystem oder einen Körper wirkt, ist definiert durch
den eigentlichen Kraftvektor F und dessen Angriffspunkt, welcher mit einem Ortsvektor identifiziert werden kann. Daher versteht man unter einem Kraftsystem eine
endliche Anzahl von Kräften F 1 . . . F m mit zugehörigen Angriffspunkten x1 . . . xm .
Sei {F 1 , x1 ; F 2 , x2 ; . . . ; F m , xm } ein Kraftsystem. Dann sind
F =
m
X
F k,
M=
k=1
m
X
(xk − x0 ) × F k
(2.62)
k=1
die resultierende Kraft bzw. das resultierende Moment bzgl. x0 des Kraftsystems.
Zwei Kraftsysteme heißen äquivalent, wenn ihre resultierenden Kräfte und Momente
gleich sind. Diese können in einem geordneten Paar (F , M ) zusammengefaßt werden,
welches als Dyname oder auch als Rotor bezeichnet wird. Äquivalente Kraftsysteme
sind dadurch gekennzeichnet, daß sie hinsichtlich der Wirkung auf einen starren
Körper gleichwertig sind. Die Bewegung starrer Körper ist also bei Kenntnis der auf
den Körper wirkenden sechskomponentigen Dyname (F , M ) als Funktion der Zeit
eindeutig bestimmt, entsprechend den sechs Freiheitsgraden des starren Körpers.
Aus diesen Überlegungen folgt ein nützliches Prinzip beim Umgang mit Kraftsystemen in starren Körpern, das Verschiebungsprinzip (Abb. 2.7):
Auf starre Körper wirkende Kräfte dürfen entlang ihrer Wirkungslinie
beliebig verschoben werden.
Abbildung 2.7: Verschiebungsprinzip.
Spezielle Kraftsysteme sind
• Einzelkräfte {F , x0 }, entsprechend der Dyname (F , 0),
• Kräftepaare {F , x1 ; −F , x2 }, entsprechend der Dyname (0, M ) (Abb. 2.8).
Die Besonderheit bei Kräftepaaren ist die, daß sie ein aufpunktunabhängiges Drehmoment darstellen. Es ist nämlich
M = (x1 − x0 ) × F + (x2 − x0 ) × (−F ) = (x1 − x2 ) × F ;
(2.63)
der Aufpunkt x0 fällt offensichtlich heraus.
83
2 Punktsysteme und starre Körper
Abbildung 2.8: Kräftepaar.
Bewegungsgleichungen
Bei der Betrachtung der Bewegung von starren Körpern ohne zusätzliche Zwangsbedingungen ist es zweckmäßig, den Aufpunkt P0 des körperfesten Bezugssystems
{P0 , e?i } in das Massenzentrum des starren Körpers zu legen. Entsprechend Gln.
(2.8), (2.20) lauten dann der Impuls- und Drehimpulssatz
dv cm
dP
=
= F,
dt
dt
dL
d
(Iω) =
= M
dt
dt
M
(2.64)
(die Indices “ext” an F und M sowie die Striche an L, M und I wurden der Einfachheit halber weggelassen). Allerdings ist, wie man in der Kontinuumsmechanik zeigt,
der Drehimpulssatz bei kontinuierlichen Körpern ein unabhängiges Axiom, kann also
P
nicht wie bei den Punktsystemen aus i (xi − x0 ) × Massenpunkt-Impulssatz (vgl.
§2.1.2) hergeleitet werden.
Die Bewegungsgleichungen (2.64) erlauben es im Prinzip, bei Vorgabe der äußeren Dyname (F (t), M (t)) die zeitliche Entwicklung der Kinemate (v cm (t), ω(t))
und schließlich der sechs Lagekoordinaten xcm (t), ycm (t), zcm (t), ϕ(t), θ(t), ψ(t) zu
berechnen. Die translatorische Komponente ist dabei vollständig äquivalent der Berechnung der Bewegung eines Massenpunktes, welche wir bereits in §1 behandelt
haben.
Wir wenden uns daher nun dem Drehimpulssatz (2.64)2 zu. Stellt man den Drehimpuls L im körperfesten Bezugssystem dar, so erhält man mit dem Hilfssatz (1.148)
d? L
dL
d ? ?
=
(Li ei ) = L̇?i e?i + L?i ė?i =
+ L?i ω × e?i
dt
dt
dt
d? L
d? L
+ ω × L?i e?i =
+ ω × L;
=
dt
dt
(2.65)
der Operator d? /dt bezeichnet dabei die zeitliche Ableitung bezüglich des körperfesten (gesternten) Systems. Da der Trägheitstensor I nur von der Geometrie des
starren Körpers abhängt, ist er im körperfesten System zeitlich konstant, und man
rechnet mit L = Iω weiter
dL
d?
d? ω
= (Iω) + ω × Iω = I
+ ω × Iω.
dt
dt
dt
84
(2.66)
2.2 Mechanik der starren Körper
Damit resultiert aus dem Drehimpulssatz (2.64)2
d? ω
+ ω × Iω = M .
dt
Das sind die Eulerschen Bewegungsgleichungen.
I
(2.67)
Ihre Form wird besonders einfach, wenn man das körperfeste System längs der
Hauptachsen des Trägheitstensors legt. Dann ist nämlich (vgl. (2.51))
I1 0 0
I = 0 I2 0 ,
0 0 I3
und somit
(2.68)
ωx
I1 ωx
(I2 − I3 ) ωy ωz
ω
I
ω
(I
ω × Iω = y × 2 y = − 3 − I1 ) ωz ωx ,
ωz
I3 ωz
(I1 − I2 ) ωx ωy
(2.69)
so daß die Eulerschen Gleichungen (2.67) in Komponenten lauten:
I1 ω̇x − (I2 − I3 ) ωy ωz = Mx ,
I2 ω̇y − (I3 − I1 ) ωz ωx = My ,
I3 ω̇z − (I1 − I2 ) ωx ωy = Mz .
(2.70)
Für den Fall, daß bei der Bewegung ein Punkt P des starren Körpers im Raum
festgehalten ist, legt man den Aufpunkt P0 des körperfesten Systems sinnvollerweise
nicht mehr in den Massenmittelpunkt, sondern in den festgehaltenen Punkt P. Die
Eulerschen Gleichungen (2.67) bzw. (2.70) gelten dann analog.
Kräftefreie Bewegung
Wir betrachten nun die kräftefreie Bewegung von starren Körpern, d. h., bei Abwesenheit äußerer Kräfte und Momente. Aus dem Impulssatz (2.64)1 folgt dann wie bei
einem einzelnen Massenpunkt, daß sich das Massenzentrum geradlinig-gleichförmig
bewegt, und es existiert folglich ein Inertialsystem, in dem das Massenzentrum ruht.
Die Rotation um das Massenzentrum wird durch die Eulerschen Gleichungen (2.70)
mit M = 0, also
I1 ω̇x = (I2 − I3 ) ωy ωz ,
I2 ω̇y = (I3 − I1 ) ωz ωx ,
I3 ω̇z = (I1 − I2 ) ωx ωy ,
(2.71)
beschrieben. Ferner existieren zwei Konstanten der Bewegung, nämlich der DrehimpulsVektor L und die kinetische Energie T . Letzteres gilt, weil entsprechend zu den
Punktsystemen (siehe Gl. (2.25)) auch in Körpern der Energiesatz
T2 − T1 = W int + W ext
(2.72)
erfüllt ist, wobei aufgrund der Starrheit W int = 0 und aufgrund der Kräftefreiheit
W ext = 0 ist. Die Lösungen von (2.71) heißen Poinsot-Bewegungen, sie beinhalten
erstaunlich komplizierte Bewegungsformen.
85
2 Punktsysteme und starre Körper
Rotation um die Hauptachsen
Eine spezielle Poinsot-Bewegung ist die permanente Rotation um eine der Hauptachsen, denn ganz offensichtlich ist für i ∈ {x, y, z}
ωi (t) = ωi0 ,
ωj (t) = 0 (j 6= i)
(2.73)
eine Lösung der Euler-Gleichungen (2.71). Interessant ist hierbei die Frage der Stabilität. Wir betrachten exemplarisch die Rotation um Hauptachse 1 (i = x) und
führen kleine Störungen ²x,y,z von ωx,y,z ein:
ωx (t) = ωx0 + ²x (t),
ωy (t) = ²y (t),
ωz (t) = ²z (t).
(2.74)
Einsetzen dieses Störansatzes in (2.71) und Linearisieren in den ²’s ergibt
I1 ²̇x = 0,
I2 ²̇y = (I3 − I1 ) ωx0 ²z ,
I3 ²̇z = (I1 − I2 ) ωx0 ²y .
(2.75)
Lösung der ersten Gleichung (2.75)1 ist
²x (t) = const;
(2.76)
die Störung von ωx bleibt also für alle Zeiten beschränkt. Durch Differentiation von
(2.75)2 nach der Zeit,
I3 − I1 0
²̈y =
ωx ²̇z ,
(2.77)
I2
und Elimination von ²̇z durch (2.75)3 erhält man
(I1 − I2 )(I1 − I3 ) 0 2
²̈y +
(ωx ) ²y = 0.
(2.78)
I2 I3
|
{z
}
µ
Eine analoge Gleichung kann auch für ²z hergeleitet werden:
²̈z + µ ²z = 0.
(2.79)
Das Lösungsverhalten dieser Gleichungen hängt ab vom Vorzeichen des Koeffizienten
µ:
I1 > I2 und I1 > I3
√
√
→ µ > 0 → Lösungen ∼ sin( µ t), cos( µ t),
I1 < I2 und I1 < I3
I2 < I1 < I3
I3 < I1 < I2
→
µ<0
→
q
Lösungen ∼ exp(± |µ| t).
Im ersteren Fall (I1 größtes oder kleinstes Hauptträgheitsmoment) bleiben also die
Störungen von ωy und ωz beschränkt, im letzteren dagegen (I1 mittleres Hauptträgheitsmoment) enthalten sie eine exponentiell in der Zeit anwachsende Mode.
Analoge Betrachtungen können auch für die Rotation um die Hauptachsen 2 und
3 durchgeführt werden, und es folgt, daß für jeden beliebigen starren Körper die
Rotation um die Hauptachse mit dem größten bzw. kleinsten Trägheitsmoment stabil
ist, wohingegen die Rotation um die Hauptachse mit dem mittleren Trägheitsmoment
instabil ist (der Körper gerät ins Trudeln).
86
2.2 Mechanik der starren Körper
Kräftefreie Bewegung axialsymmetrischer Körper
Axialsymmetrische Körper, auch als symmetrische Kreisel bezeichnet, besitzen eine körperfeste Symmetrieachse (“Figurenachse”), welche wir mit der Hauptachse e?z
identifizieren (Abb. 2.9). Dann sind wegen der Symmetrie die Hauptträgheitsmomente I1 (um die Achse e?x ) und I2 (um die Achse e?y ) gleich; I3 ist im allgemeinen
davon verschieden.
Abbildung 2.9: Axialsymmetrischer Körper (symmetrischer Kreisel).
Die Eulerschen Gleichungen (2.71) lauten somit für axialsymmetrische Körper
I3 − I1
ωz ωy ,
I1
I3 − I1
=
ωz ωx ,
I1
= 0;
ω̇x = −
ω̇y
ω̇z
(2.80)
dieses System kann ganz allgemein gelöst werden. Zunächst folgt aus (2.71)3
ωz (t) = ωz0 = const;
(2.81)
die Winkelgeschwindigkeit um die Figurenachse ist also eine Konstante der Bewegung und aus den jeweiligen Anfangsbedingungen bestimmt. Ähnlich wie bei der
Störungsrechnung des vorigen Beispiels leitet man durch Differenzieren von (2.80)1
und nachfolgendes Einsetzen von (2.80)2
Ã
(I3 − I1 ) ωz0
ω̈x +
I1
!2
ωx = 0
(2.82)
her, was mit der Kreisfrequenz
Ω=
(I3 − I1 ) ωz0
I1
(2.83)
der vertrauten Schwingungsdifferentialgleichung
ω̈x + Ω2 ωx = 0
(2.84)
entspricht. Entsprechend findet man auch
ω̈y + Ω2 ωy = 0.
(2.85)
87
2 Punktsysteme und starre Körper
Die allgemeine Lösung von (2.84) ist
0
ωx = ω⊥
cos(Ωt + Φ).
(2.86)
Substitution dieses Ergebnisses in (2.80)2 ergibt für ωy
0
ω̇y = Ω ωx = Ω ω⊥
cos(Ωt + Φ)
⇒
0
ωy = ω⊥
sin(Ωt + Φ).
(2.87)
Zusammengefaßt ist also die allgemeine Lösung der Eulerschen Gleichungen (2.80)
für einen axialsymmetrischen Körper
0
cos(Ωt + Φ),
ωx (t) = ω⊥
0
ωy (t) = ω⊥ sin(Ωt + Φ),
ωz (t) = ωz0 ,
(2.88)
0
wobei ω⊥
, ωz0 und Φ drei frei wählbare Konstanten sind, die aus der jeweiligen
Anfangsbedingung für die Winkelgeschwindigkeit bestimmt werden können.
Abbildung 2.10: Präzession der Winkelgeschwindigkeit um die Figurenachse.
Der Betrag der Winkelgeschwindigkeit ist offensichtlich zeitlich konstant:
ω = |ω| =
q
q
ωx2 + ωy2 + ωz2 =
0 2
(ωz0 )2 + (ω⊥
) = const.
(2.89)
0
Für den allgemeinen Fall ωz0 6= 0, ω⊥
6= 0 ist (2.88)1,2 die Parameterdarstellung eines
0
Kreises mit Radius ω⊥ , d. h., der Vektor der Winkelgeschwindigkeit ω präzediert
mit der Kreisfrequenz Ω um die Figurenachse e?z (Abb. 2.10).
Die Komponenten des Drehimpulses bezüglich der Körperachsen e?x , e?y , e?z sind
0
cos(Ωt + Φ),
Lx (t) = I1 ωx (t) = I1 ω⊥
0
Ly (t) = I1 ωy (t) = I1 ω⊥ sin(Ωt + Φ),
Lz (t) = I3 ωz (t) = I3 ωz0 .
(2.90)
Der Drehimpuls ist also für I1 6= I3 nicht parallel zur Winkelgeschwindigkeit, präzediert aber ebenfalls mit der Kreisfrequenz Ω um die Figurenachse e?z , und zwar
derart, daß e?z , L und ω zu jedem Zeitpunkt in einer Ebene liegen.
Betrachtet man die Bewegung von einem raumfesten System aus, in welchem der
Drehimpulsvektor L fest ist (Konstante der Bewegung!), präzedieren folglich die
88
2.2 Mechanik der starren Körper
Abbildung 2.11: Präzession der Figurenachse und der Winkelgeschwindigkeit um die
Achse des Drehimpulsvektors.
Figurenachse e?z und die Winkelgeschwindigkeit ω mit der Kreisfrequenz Ω um die
Achse des Drehimpulses L (Abb. 2.11).
In guter Näherung ist die Erde ein Beispiel für einen symmetrischen Kreisel, auf den
kein äußeres Moment wirkt. Aufgrund der Abplattung an den Polen ist
I3 − I1
1
≈
,
I1
300
(2.91)
so daß für die Präzessionsperiode
T =
2π
2π I1
= 0
≈ 300 Tage
Ω
ωz I3 − I1
(2.92)
zu erwarten ist. Tatsächlich beobachtet man ein (allerdings unregelmäßiges) Wandern der Erdrotationsachse um den Nordpol mit einer Amplitude von einigen Metern und einer Periode von ca. 430 Tagen. Die Diskrepanz ist wahrscheinlich darauf
zurückzuführen, daß die Erde nicht ideal starr ist. Außerdem ist die Erde in Wirklichkeit einem schwachen Drehmoment unterworfen, das aus den Gravitationskräften
von Sonne und Mond resultiert. Dieses Moment bewirkt eine weitere, sehr langsame
Präzession der Erdachse um die Normale der Ekliptik (Umlaufbahn um die Sonne)
mit einer Periode von ca. 26000 Jahren.
Zwei einfache Spezialfälle der Bewegung symmetrischer Kreisel seien noch erwähnt:
0
= 0: permanente Rotation um die Figurenachse e?z .
• ω⊥
• ωz0 = 0 (⇒ Ω = 0): permanente Rotation um eine Körperachse senkrecht zur
Figurenachse (in der x? -y ? -Ebene).
89
2 Punktsysteme und starre Körper
2.2.4 Ebene Bewegung
Kinematik
Wir bezeichnen die Bewegung eines starren Körpers als eben, wenn die Bewegungen
aller Körperpunkte parallel zu einer festen Ebene verlaufen. Ohne Beschränkung der
Allgemeinheit legen wir diese in die x-y-Ebene des raumfesten Systems. Weiterhin
nehmen wir an, daß der betrachtete Körper symmetrisch zu dieser Ebene ist.
Abbildung 2.12: Ebene Bewegung starrer Körper.
Die Bewegung wird durch die folgende Kinemate beschrieben (Abb. 2.12):
v 0 = ẋ0 ex + ẏ0 ey ,
(2.93)
ω = ϕ̇ ez ,
und die Bewegung eines jeden Punktes ist gegeben durch
ẋ0
0
x − x0
?
ẏ
0
v = v 0 + ω × x = 0 + × y − y0
0
ϕ̇
0
⇒
ẋ = ẋ0 − ϕ̇ (y − y0 ),
(2.94)
ẏ = ẏ0 + ϕ̇ (x − x0 ).
Die Anzahl der Freiheitsgrade hat sich also durch die Einschränkung ebener Bewegungen von sechs auf drei reduziert, und insbesondere sind die drei Eulerschen
Winkel durch den einen Winkel ϕ ersetzt.
Aus (2.94) folgt sofort, daß es bei nichtverschwindender Rotation (ϕ̇ 6= 0) zu jedem
Zeitpunkt genau einen Ortsvektor xp gibt, der sich in Ruhe befindet (v p = 0):
xp = x0 −
ẏ0
,
ϕ̇
y p = y0 +
ẋ0
.
ϕ̇
(2.95)
Dieser Punkt heißt Momentanpol oder Momentanzentrum. Er kann allerdings auch
außerhalb des sich bewegenden Körpers liegen.
90
2.2 Mechanik der starren Körper
Bewegungsgleichungen
Für die Translation des Massenzentrums gilt wie gehabt der Impulssatz
M
dv cm
= F,
dt
(2.96)
wobei die Kraft aufgrund der angenommenen ebenen Bewegung keine z-Komponente
haben kann. Es folgt
M ẍcm = Fx ,
(2.97)
M ÿcm = Fy .
Entsprechend gilt für die Rotation der Drehimpulssatz
dL
d(Iω)
=
= M,
dt
dt
mit M = Mz ez .
(2.98)
Da die Raumachse ez und die Körperachse e?z zusammenfallen, findet man mit (2.93)
für den Drehimpuls
L =
=
=
=
=
I(ϕ̇ez )
ϕ̇ (Ixz e?x + Iyz e?y + Izz e?z )
Izz ϕ̇ e?z
Izz ϕ̇ ez
I ϕ̇ ez
(I := Izz )
(2.99)
(aufgrund der angenommenen Symmetrie des Körpers bezüglich der x-y-Ebene verschwinden die Deviationsmomente Ixz und Iyz ). Das Trägheitsmoment I := Izz ist
dabei zeitlich konstant. Die einzige relevante Komponente des Drehimpulssatzes ist
also die z-Komponente; sie lautet
I ϕ̈ = Mz .
(2.100)
Wie üblich hat man hierbei noch die Wahl des Bezugspunktes (beispielsweise das
Massenzentrum; dann ist für I das Trägheitsmoment I 0 um das Massenzentrum zu
verwenden).
Energiesatz
Gemäß Gl. (2.26), welche auf starre Körper übertragbar ist, kann die kinetische Energie T aufgeteilt werden in die kinetische Energie der Translation des Massenzentrums
Tcm und die kinetische Energie der Bewegung um das Massenzentrum T 0 . Letztere
ist für Starrkörperbewegungen gleich der Rotationsenergie um das Massenzentrum,
welche durch (2.49) gegeben ist. Es ist also
T = Ttrans + Trot =
I0
M 2
vcm + ω 2 ,
2
2
(2.101)
91
2 Punktsysteme und starre Körper
wobei I 0 wiederum das Trägheitsmoment um das Massenzentrum ist.
Nach (2.24) lautet die Bilanz der kinetischen Energie
Ṫ = Lext ,
(2.102)
wobei Lext die Leistung der äußeren Kräfte ist (aufgrund der Starrheit ist die innere
Leistung Lint gleich Null). Nach (2.23) findet man für Lext die Aufteilung (Indices
“ext” an den Kräften weggelassen)
Lext =
X
X
F i · vi =
i
X
= v cm ·
F i · (v cm + v 0i )
i
Fi +
i
= F · v cm +
X
X
F i · v 0i
i
F i · (ω × x0 )
i
= F · v cm +
X
i
= F · v cm + ω ·
ω · (x0 × F i )
X
M 0i
i
= F · v cm + M 0 · ω;
(2.103)
M 0 ist das Drehmoment um das Massenzentrum. Bei ebener Bewegung vereinfacht
sich das zu
Lext = Fx (vcm )x + Fy (vcm )y + Mz0 ω.
(2.104)
Die integrierte Form von (2.102) ergibt den Energiesatz
Zt2
Lext dt = W ext ,
T2 − T1 =
(2.105)
t1
wobei sich die äußere Arbeit W ext entsprechend (2.104) aus der am Massenzentrum
verrichteten Arbeit der resultierenden Kraft und der Rotationsarbeit des resultierenden Moments zusammensetzt.
Für konservative Systeme existiert ein Potential V (xcm , ycm , ϕ), so daß
∂V
∂V
∂V
Fx = −
, Fy = −
, Mz = −
.
∂xcm
∂ycm
∂ϕ
Dann wird
Zt2
W
ext
Z2
ext
=
(2.106)
L
t1
dt =
(Fx dxcm + Fy dycm + Mz dϕ)
1
Z2
= −
1
Ã
∂V
∂V
∂V
dxcm +
dycm +
dϕ
∂xcm
∂ycm
∂ϕ
!
Z2
= −
dV = V1 − V2 ,
(2.107)
1
und (2.105) geht über in den Energieerhaltungssatz
T1 + V 1 = T2 + V 2
92
⇔
T + V = E = const.
(2.108)
2.2 Mechanik der starren Körper
Berechnung von Trägheitsmomenten
Bei der Auswertung der Bewegungsgleichung (2.100) oder dem Energiesatz in der
Form (2.102), (2.105) oder (2.108) ist es erforderlich, das Trägheitsmoment I (= Izz )
0
bzw. I 0 (= Izz
) des betrachteten Körpers zu kennen. Nach der allgemeinen Definition
(2.45) der Komponenten des Trägheitstensors ist
Z
I=
³
V
Z
´
ρ x?2 + y ?2 dV ? =
V
ρ (rz? )2 dV ? ,
(2.109)
ρ (rz0 )2 dV 0
(2.110)
bzw.
Z
0
I =
V
³
02
ρ x +y
02
´
Z
0
dV =
V
(zur Erinnerung: die Sterne kennzeichnen ein körperfestes System mit beliebigem Ursprung, die Striche ein körperfestes System mit dem Massenzentrum als Ursprung).
Es werden also die Massenelemente ρ dV ? (0) des Körpers mit ihren Abstandsquadraten (rz? (0) )2 von der gewählten z-Achse multipliziert und aufsummiert.
Sehr nützlich ist auch der Satz von Steiner, den wir in allgemeiner Form bereits
kennengelernt haben (siehe (2.60)). Nach ihm besteht ein einfacher Zusammenhang
zwischen dem Trägheitsmoment I bezüglich eines beliebigen Bezugspunktes und dem
Trägheitsmoment I 0 bezüglich des Massenzentrums:
³
´
?2
0
2
0
I = Icm + I 0 = M x?2
cm + ycm + I = M dz + I ,
(2.111)
wobei dz der Abstand der z ? -Achse (durch den Bezugspunkt für I) von der z 0 -Achse
(durch das Massenzentrum, Bezugspunkt für I 0 ) ist.
Beispiel: Dünnwandiges Rohr auf schiefer Ebene
Wir betrachten ein dünnwandiges Rohr mit der Gesamtmasse M , der konstanten
Dichte ρ, dem Radius R und der Wandstärke d (d ¿ R), welches eine schiefe Ebene
der Neigung α hinunterrollt, ohne zu gleiten (Abb. 2.13). Das Schwerefeld ist als
homogen angenommen (Schwerebeschleunigung g).
Abbildung 2.13: Dünnwandiges Rohr auf schiefer Ebene.
93
2 Punktsysteme und starre Körper
Das Trägheitsmoment des Rohres um das Massenzentrum ist mit rz0 ≈ R (wegen
d ¿ R gerechtfertigt)
Z
I0 =
V
Z
ρ (rz0 )2 dV 0 = ρR2
V
dV 0 = ρV R2 = M R2 .
(2.112)
Die Annahme “rollen, ohne zu gleiten” besagt, daß der jeweilige Auflagepunkt des
Rohres auf der Unterlage in Ruhe, also Momentanpol der Bewegung ist:
xp = xcm ,
yp = 0.
(2.113)
Mit
ẋcm = v,
ycm = R,
ẏcm = 0,
ϕ̇ = ω
(2.114)
folgt aus den Momentanpol-Beziehungen (2.95)
ẏcm
= xcm ,
ϕ̇
ẋcm
v
= ycm +
=R+ =0
ϕ̇
ω
xp = xcm −
yp
⇒
v = −Rω.
(2.115)
Die erste Beziehung bestätigt (2.113)1 , die zweite wird als Rollbedingung bezeichnet.
Das Minuszeichen kommt daher, daß die Rotation im Uhrzeigersinn (mathematisch
negativ) verläuft.
Die Bewegungsgleichungen (2.97)1 und (2.100) lauten
M v̇ = Fx = M g sin α − FR ,
(2.116)
I 0 ω̇ = Mz0 = −FR R,
wobei FR die von der Unterlage aufgebrachte Reibungskraft ist, die das Abrollen
ermöglicht. Mit der Rollbedingung (2.115) folgt aus der zweiten Gleichung
I0
− v̇ = −FR R
R
⇒
I0
v̇ = FR .
R2
(2.117)
Addition von (2.116)1 und (2.117) eliminiert die unbekannte Reibungskraft FR ,
Ã
!
I0
M + 2 v̇ = M g sin α
R
⇒
v̇ =
g sin α
.
0
1 + MIR2
(2.118)
Für eine anfänglich bei x = 0 in Ruhe befindliche Walze mit entsprechenden Anfangsbedingungen
xcm (0) = 0,
v(0) = 0
(2.119)
ergibt Integration dieser Gleichung
v=
94
gt sin α
,
0
1 + MIR2
(2.120)
2.2 Mechanik der starren Körper
und schließlich, unter Verwendung von (2.112),
xcm =
1 2
gt
2
sin α
1+
M R2
I0
=
gt2
sin α.
4
(2.121)
Dieses Ergebnis kann im übrigen auch durch Auswertung der Energieerhaltung
M 2 I0 2
v + ω + V = E = const
2
2
(2.122)
gewonnen werden, wobei nach Abb. 2.13 das Potential durch
V = −M gh = −M gxcm sin α
(2.123)
gegeben ist.
95
3 Analytische Mechanik
3.1 Zwangsbedingungen
3.1.1 Klassifikation von Zwangsbedingungen
Wie am Anfang von Kapitel 2 betrachten wir die Bewegung eines Systems von n
Massenpunkten {Pi , i = 1, . . . , n}. An dieser Stelle wurde bereits die Problematik
eventueller Zwangsbedingungen angesprochen, die die Zahl der Freiheitsgrade f von
3n bei freier Bewegung aller Massenpunkte verringern können. Drei Beispiele hierfür
sind:
1. Starre Punktsysteme, bei denen die Zwangsbedingungen die Form
∀i, j : |xi − xj | = rij = const
⇔
|xi − xj | − rij = 0
(3.1)
haben, und die Anzahl der Freiheitsgrade im allgemeinen Sechs beträgt.
2. Einschränkung der Bewegung der Massenpunkte auf eine Kugeloberfläche mit
Radius R:
∀i : |xi | = R = const
⇔
|xi | − R = 0.
(3.2)
In diesem Fall beträgt die Anzahl der Freiheitsgrade 2n.
3. Bewegung eines Punktsystems in einer Hohlkugel mit Radius R:
∀i : |xi | < R.
(3.3)
Hier wird die Anzahl der Freiheitsgrade nicht verringert, sondern nur der mögliche Wertebereich der 3n Lagekoordinaten des Punktsystems eingeschränkt.
Man erkennt zwei verschiedene Typen von möglichen Zwangsbedingungen. Diejenigen der Beispiele 1 und 2 lassen sich offenbar in der Form
fλ (x1 , x2 , . . . , xn ) = 0,
λ = 1...Λ
(3.4)
formulieren. Solche Zwangsbedingungen heißen holonom (“ganzgesetzlich”). Zwangsbedingungen, die nicht in der Form (3.4) darstellbar sind (siehe Beispiel 3), werden
entsprechend als nichtholonom bezeichnet.
In beiden Fällen unterscheidet man weiterhin zwischen Zwangsbedingungen, die die
Zeit nicht explizit enthalten (“skleronom” bzw. “starrgesetzlich”) und solchen, die
die Zeit explizit enthalten (“rheonom” bzw. “fließgesetzlich”). Die drei obigen Beispiele sind offensichtlich alle skleronom. Eine Perle, die auf einem bewegten Draht
gleitet, ist dagegen ein Beispiel für eine rheonome Zwangsbedingung.
96
3.2 Lagrangesche Gleichungen
3.1.2 Generalisierte Koordinaten
Beim Vorliegen von holonomen Zwangsbedingungen sind die 3n Koordinaten xi , yi ,
zi der n Massenpunkte nicht mehr unabhängig, was in der Verringerung der Anzahl
der Freiheitsgrade zum Ausdruck kommt. Sind die Λ Gleichungen (3.4) unabhängig
voneinander, beträgt die Anzahl der Freiheitsgrade f = 3n − Λ. Das Punktsystem
kann dann durch Vorgabe von f = 3n − Λ geeignet gewählten unabhängigen Lagekoordinaten
q1 , q2 , . . . , q f
vollständig beschrieben werden, d. h., diese legen die Ortsvektoren x1 , x2 , . . . , xn
der n Massenpunkte eindeutig fest:
x1 = x1 (q1 , q2 , . . . qf , t),
x2 = x2 (q1 , q2 , . . . qf , t),
..
.
(3.5)
xn = xn (q1 , q2 , . . . qf , t).
Das sind 3n Transformationsgleichungen zwischen den abhängigen Koordinaten xi ,
yi , zi und den unabhängigen Koordinaten q1 , q2 , . . . , qf . Letztere sind auch unter
dem Namen generalisierte Koordinaten bekannt. Ihre Zeitableitungen q̇1 , q̇2 , . . . , q̇f
heißen entsprechend generalisierte Geschwindigkeiten.
Im Fall des Beispiels 1 können die drei kartesischen Koordinaten des Massenzentrums
und die drei Eulerschen Winkel der Drehung als generalisierte Koordinaten verwendet werden: xcm , ycm , zcm , ϕ, θ, ψ. Für das Beispiel 2 eignen sich die Azimutal- und
Polarwinkel ϕi , θi (i = 1 . . . n) der n Massenpunkte als generalisierte Koordinaten.
3.2 Lagrangesche Gleichungen
3.2.1 D’Alembertsches Prinzip, Prinzip der virtuellen Arbeit
Die Schwierigkeit, daß die 3n Koordinaten xi , yi , zi eines Punktsystems mit holonomen Zwangsbedingungen nicht unabhängig sind, kann wie oben gezeigt durch
die Einführung der generalisierten Koordinaten überwunden werden. Es besteht allerdings noch ein weiteres Problem: Zwangsbedingungen gehen mit auf die Massenpunkte wirkenden Zwangskräften einher, welche natürlich in den Bewegungsgleichungen berücksichtigt werden müssen, aber a priori unbekannt sind. Beispielsweise
hängt die Zwangskraft, die eine Perle auf einem gekrümmten Draht hält, von der
Geschwindigkeit der Perle ab.
Es wäre also wünschenswert, eine Formulierung der Bewegung von Punktsystemen
zu finden, in der die Zwangskräfte nicht mehr vorkommen. Um das zu erreichen,
definieren wir zunächst den Begriff der virtuellen Verrückung:
97
3 Analytische Mechanik
Unter einer virtuellen Verrückung eines Punktsystems versteht man einen
Satz {δxi }i=1...n instantaner infinitesimaler Änderungen der Positionen
xi der n Massenpunkte, die mit den vorherrschenden Kräften und Zwangsbedingungen verträglich sind.
Instantan bedeutet dabei, daß sich die Verrückung nicht während eines Zeitintervalls
zwischen t und t + dt, sondern zu einem festen Zeitpunkt t ereignen soll.
Wir multiplizieren nun den Impulssatz für den Massenpunkt Pi in der Form
F i = ṗi ,
(3.6)
wobei auf die explizite Aufteilung von F i in die externe Kraft F ext
und die Wechi
selwirkungskräfte F ij (vgl. Gl. (2.7)) hier verzichtet wird, skalar mit den virtuellen
Verrückungen δxi und summieren auf:
n
X
(F i − ṗi ) · δxi = 0.
(3.7)
i=1
(a)
Im allgemeinen ist F i die Summe aus der angewendeten Kraft F i und der Zwangs(z)
kraft F i :
(a)
(z)
Fi = Fi + Fi .
(3.8)
Die entscheidende Zusatzinformation zur Elimination der Zwangskräfte aus dem
Problem ist nun die, daß die virtuelle Arbeit der Zwangskräfte verschwindet:
n
X
(z)
F i · δxi = 0.
(3.9)
i=1
Für starre Systeme haben wir uns das bereits in §2.1.3 klargemacht. Auch für Teilchen, die gezwungen sind, sich auf einer Raumkurve oder Fläche zu bewegen, ist
evident, daß die Zwangskräfte senkrecht zu der Kurve bzw. Fläche stehen, während
die virtuellen Verrückungen tangential erfolgen.
Wir bilden nun die Differenz aus (3.7) und (3.9) und erhalten unter Verwendung von
(3.8)
n
X
(a)
(F i − ṗi ) · δxi = 0.
(3.10)
i=1
Diese Relation ist als D’Alembertsches Prinzip bekannt. Sie enthält in der Tat nur
(a)
(z)
noch die angewendeten Kräfte F i , wohingegen die Zwangskräfte F i nicht mehr
in Erscheinung treten.
Für den Spezialfall statischer Systeme, d. h., jedes Teilchen des Systems ist im Gleichgewicht, ist ṗi = 0, und das D’Alembertsche Prinzip geht über in
n
X
(a)
F i · δxi = 0.
(3.11)
i=1
Diese Aussage heißt Prinzip der virtuellen Arbeit und besagt, daß bei statischen
Systemen die virtuelle Arbeit der angewendeten Kräfte verschwindet.
98
3.2 Lagrangesche Gleichungen
3.2.2 Herleitung der Lagrangeschen Gleichungen
Wir werden nun mit Hilfe des D’Alembertschen Prinzips (3.10) die Lagrangeschen
Gleichungen herleiten. Der hochgestellte Index “(a)” zur Kenntlichmachung der angewendeten Kräfte wird dabei der Einfachheit halber weggelassen, da die Zwangskräfte nicht mehr in Erscheinung treten.
Wir beginnen damit, die virtuellen Verrückungen δxi mit Hilfe der Transformationsgleichungen (3.5) auf die entsprechenden virtuellen Verrückungen δqj der generalisierten Koordinaten umzuschreiben:
X ∂xi
δxi =
δqj .
(3.12)
j ∂qj
Der Summationsindex j läuft dabei von 1 bis f . Da nach Definition die virtuellen Verrückungen instantan ablaufen, tritt in (3.12) keine partielle Ableitung nach
der Zeit auf, auch wenn diese in den Transformationsgleichungen (3.5) explizit vorkommt.
Einsetzen von (3.12) in das D’Alembertsche Prinzip (3.10) ergibt mit pi = mi ẋi
X
X
∂xi
∂xi
Fi ·
δqj −
mi ẍi ·
δqj = 0.
(3.13)
∂qj
∂qj
i, j
i, j
Mit der Definition der generalisierten Kräfte
X
∂xi
Qj =
Fi ·
∂qj
i
(3.14)
kann man den ersten Term von (3.13), die virtuelle Arbeit der angewendeten Kräfte,
umschreiben zu
X
X
∂xi
Fi ·
δqj =
Qj δqj .
(3.15)
∂qj
i, j
j
Für das weitere benötigen wir die Hilfsformeln
X ∂xi
∂xi
v i = ẋi =
q̇j +
∂t
j ∂qj
⇒
∂v i
∂xi
=
,
∂ q̇j
∂qj
∂ 2 xi
∂
d ∂xi X ∂ 2 xi
=
q̇k +
=
dt ∂qj
∂qj ∂t
∂qj
k ∂qj ∂qk
(3.16)
(3.17)
Ã
X ∂xi
k
∂xi
q̇k +
∂qk
∂t
!
=
∂v i
.
∂qj
(3.18)
Die Skalarprodukte im zweiten Term von (3.13) lassen sich damit wie folgt umformulieren:
Ã
!
d
∂xi
d ∂xi
∂xi
=
ẋi ·
− ẋi ·
ẍi ·
∂qj
dt
∂qj
dt ∂qj
Ã
!
d
∂v i
∂v i
=
vi ·
− vi ·
dt
∂ q̇j
∂qj
Ã
!
2
∂ v 2i
d
∂ vi
−
,
(3.19)
=
dt ∂ q̇j 2
∂qj 2
99
3 Analytische Mechanik
und es folgt
X
i, j
(
X d
∂xi
δqj =
mi ẍi ·
∂qj
dt
i, j
=
X
j
=
X
(
(
j
d
dt
d
dt
Ã
Ã
Ã
∂ mi v 2i
∂ q̇j 2
∂
∂ q̇j
∂T
∂ q̇j
P
i
!
!
∂ mi v 2i
−
∂qj 2
mi v 2i
2
∂T
−
∂qj
!
)
∂
−
∂qj
δqj ,
)
δqj
P
i
mi v 2i
2
)
δqj
(3.20)
wobei T die kinetische Energie des Punktsystems ist. Mit (3.15) und (3.20) sind nun
die beiden Terme des D’Alembertschen Prinzips (3.13) bestimmt. Es lautet
X
(
j
d
dt
Ã
∂T
∂ q̇j
!
∂T
−
− Qj
∂qj
)
δqj = 0.
(3.21)
Da die generalisierten Koordinaten qj unabhängig sind, ist irgendeine virtuelle Verrückung δqk für k 6= l unabhängig von δql . Somit ist (3.21) nur erfüllt, wenn die Terme
in geschweiften Klammern einzeln verschwinden. Es resultieren die f Gleichungen
Ã
!
d ∂T
∂T
−
= Qj .
(3.22)
dt ∂ q̇j
∂qj
Sie werden zuweilen als Lagrangesche Gleichungen bezeichnet. In der Regel verwendet man diesen Begriff aber für die spezielle Form, die die Gleichungen (3.22) für konservative Systeme annehmen. Dann existiert ein skalares Potential V (x1 , x2 , . . . , xn ),
bzw. V (q1 , q2 , . . . , qf , t), mit
F i = −grad i V.
Die generalisierten Kräfte können geschrieben werden als
X
X ∂V ∂xi
∂xi
∂V
Qj = −
grad i V ·
=−
·
=−
,
∂qj
∂qj
∂qj
i
i ∂xi
(3.23)
(3.24)
und (3.22) geht über in
Ã
!
d ∂T
∂(T − V )
−
= 0.
(3.25)
dt ∂ q̇j
∂qj
Da das Potential V als reine Ortsfunktion nicht von den generalisierten Geschwindigkeiten abhängt, ist das äquivalent zu
Ã
!
d ∂(T − V )
∂(T − V )
−
= 0.
(3.26)
dt
∂ q̇j
∂qj
Wir definieren die Lagrange-Funktion L als
L=T −V
(3.27)
und erhalten schließlich die f Gleichungen
Ã
!
∂L
d ∂L
−
= 0,
j = 1 . . . f.
(3.28)
dt ∂ q̇j
∂qj
Wenn im folgenden von Lagrangeschen Gleichungen gesprochen wird, sind, falls nicht
ausdrücklich anders erwähnt, diese Gleichungen gemeint.
100
3.2 Lagrangesche Gleichungen
3.2.3 Anwendungen der Lagrangeschen Gleichungen
Die Lagrangeschen Gleichungen (3.28) sind ein sehr effizientes Mittel zur Bestimmung der Bewegungsgleichungen komplexer Systeme (und auch starrer Körper) in
konservativen Kraftfeldern. Dabei besteht die Kunst darin, geeignete generalisierte Koordinaten einzuführen, und dann T und V als Funktion dieser generalisierten
Koordinaten auszudrücken, um die Lagrange-Funktion L in der Form
L = T − V = L(q1 , q2 , . . . , qf , q̇1 , q̇2 , . . . , q̇f , t)
(3.29)
zu erhalten. Das wird nun an drei Beispielen illustriert.
Teilchen im schwerefreien Raum
Ein einzelner Massenpunkt der Masse m bewege sich im schwerefreien Raum. Es liegen keine Zwangsbedingungen vor, also können zum Beispiel die kartesischen Koordinaten x, y, z des Massenpunktes als generalisierte Koordinaten verwendet werden.
Es ist
T =
m 2 m 2
v = (ẋ + ẏ 2 + ż 2 ),
2
2
V = 0,
(3.30)
und somit
L=T =
m 2
(ẋ + ẏ 2 + ż 2 ).
2
(3.31)
Entsprechend den drei Freiheitsgraden gibt es drei Lagrangesche Gleichungen. Mit
∂L
= mẋ,
∂ ẋ
d
dt
Ã
∂L
∂ ẋ
!
= mẍ,
∂L
=0
∂x
(3.32)
lautet die Gleichung für die Koordinate x
mẍ = 0.
(3.33)
Entsprechend findet man für y und z
mÿ = 0,
mz̈ = 0.
(3.34)
In Vektorschreibweise zusammengefaßt entspricht das
ẍ = 0,
(3.35)
d. h., die Beschleunigung des Massenpunktes verschwindet, und es liegt eine geradliniggleichförmige Bewegung vor, was natürlich auch herauskommen muß.
101
3 Analytische Mechanik
Abbildung 3.1: Perle auf rotierendem Drahtkreis.
Perle auf rotierendem Drahtkreis
Gegeben ist ein senkrecht aufgestellter Drahtkreis (Radius R) im homogenen Gravitationsfeld (Schwerebeschleunigung g), der mit der bekannten Winkelgeschwindigkeit ω um die vertikale Achse rotiert. Auf diesem bewegt sich ein Massenpunkt der
Masse m (Abb. 3.1).
Das System hat offenbar nur einen Freiheitsgrad. Eine geeignete generalisierte Koordinate ist der in Abb. 3.1 eingetragene Winkel ϕ.
Für die Geschwindigkeit des Massenpunktes gilt
v = Rϕ̇ eϕ + rω e⊥ = Rϕ̇ eϕ + Rω cos ϕ e⊥ ,
(3.36)
und somit ist die kinetische Energie
m
m
T = R2 ϕ̇2 + R2 ω 2 cos2 ϕ.
2
2
Mit dem Potential des homogenen Schwerefeldes,
(3.37)
V = mgz = mgR sin ϕ,
(3.38)
ist die in der generalisierten Koordinate ϕ ausgedrückte Lagrange-Funktion
´
m ³
L = T − V = R2 ϕ̇2 + ω 2 cos2 ϕ − mgR sin ϕ.
(3.39)
2
Da das System nur einen Freiheitsgrad hat, gibt es auch nur eine Lagrange-Gleichung
[siehe (3.28)]. Mit
Ã
!
d ∂L
∂L
= mR2 ϕ̇,
= mR2 ϕ̈,
∂ ϕ̇
dt ∂ ϕ̇
∂L
= −mR2 ω 2 sin ϕ cos ϕ − mgR cos ϕ
∂ϕ
m
= − R2 ω 2 sin(2ϕ) − mgR cos ϕ
2
lautet sie
m
mR2 ϕ̈ + R2 ω 2 sin(2ϕ) + mgR cos ϕ = 0
2
⇒ ϕ̈ +
102
ω2
g
sin(2ϕ) + cos ϕ = 0.
2
R
(3.40)
(3.41)
3.2 Lagrangesche Gleichungen
Das ist die gesuchte Bewegungsgleichung des Problems “Perle auf rotierendem Drahtkreis”.
Doppelpendel
Gemäß Abb. 3.2 betrachten wir als letztes Beispiel ein Doppelpendel, bestehend aus
zwei Massenpunkten der Masse m, die mit masselosen Stäben der Länge l verbunden
sind und im homogenen Schwerefeld schwingen. Die Schwingung sei auf die x-zEbene beschränkt.
Abbildung 3.2: Doppelpendel mit gleichen Massen und Längen.
Dieses System hat zwei Freiheitsgrade, und als generalisierte Koordinaten eignen sich
die beiden Winkel ϕ1 , ϕ2 . Die Bestimmung der kinetischen und potentiellen Energie
als Funktion dieser Winkel gelingt hier am besten, indem die Transformation (3.5)
explizit aufgestellt wird:
x1 = l sin ϕ1 ,
z1 = −l cos ϕ1 ,
(3.42)
x2 = l sin ϕ1 + l sin ϕ2 ,
z2 = −l cos ϕ1 − l cos ϕ2 .
Damit ist nämlich
´
m³ 2
ẋ1 + ż12 + ẋ22 + ż22
T =
2
mn2 2
l ϕ̇1 cos2 ϕ1 + l2 ϕ̇21 sin2 ϕ1
=
2
+(lϕ̇1 cos ϕ1 + lϕ̇2 cos ϕ2 )2 + (lϕ̇1 sin ϕ1 + lϕ̇2 sin ϕ2 )2
o
m 2 2
l ϕ̇2 + ml2 ϕ̇1 ϕ̇2 (sin ϕ1 sin ϕ2 + cos ϕ1 cos ϕ2 )
2
m
= ml2 ϕ̇21 + l2 ϕ̇22 + ml2 ϕ̇1 ϕ̇2 cos(ϕ1 − ϕ2 ),
2
= ml2 ϕ̇21 +
(3.43)
und
V
= mgz1 + mgz2
= −mgl (2 cos ϕ1 + cos ϕ2 ).
(3.44)
103
3 Analytische Mechanik
Die Lagrange-Funktion des Doppelpendels lautet also
L = T −V
= ml2 ϕ̇21 +
m 2 2
l ϕ̇2 + ml2 ϕ̇1 ϕ̇2 cos(ϕ1 − ϕ2 ) + mgl (2 cos ϕ1 + cos ϕ2 );
(3.45)
2
mit dieser berechnet man die zwei Lagrangeschen Gleichungen des Systems gemäß
d
dt
Ã
∂L
∂ ϕ̇1
!
d
dt
∂L
= 0,
−
∂ϕ1
Ã
∂L
∂ ϕ̇2
!
−
∂L
= 0.
∂ϕ2
(3.46)
Die elementare, aber recht längliche Rechnung sei dem Leser als Übung überlassen.
Die daraus folgenden gekoppelten Bewegungsgleichungen für ϕ1 und ϕ2 wären mit
der Newtonschen Mechanik nur sehr schwierig bestimmbar.
3.2.4 Erhaltungssätze
Generalisierte Impulse und zyklische Koordinaten
Neben der expliziten Berechnung der Bewegungsgleichungen konservativer holonomer Systeme kann man aus den Lagrangeschen Gleichungen (3.28) häufig auch Erhaltungsgrößen (Konstanten der Bewegung) bestimmen. Um das zu sehen, definieren
wir den generalisierten Impuls pj , der der Koordinate qj zugeordnet ist, als
pj =
∂L
,
∂ q̇j
j = 1 . . . f.
(3.47)
Damit lassen sich die Lagrangeschen Gleichungen (3.28) schreiben als
p˙j =
∂L
,
∂qj
j = 1 . . . f.
(3.48)
Wenn die Lagrange-Funktion eine bestimmte Koordinate qk nicht enthält, dann
nennt man diese Koordinate zyklisch (eine Abhängigkeit von der zugehörigen Geschwindigkeit q̇k darf bestehen). In diesem Fall lautet (3.48)
p˙k = 0
⇒
pk (t) = const.
(3.49)
Es gilt also der allgemeine Erhaltungssatz:
Der zu einer zyklischen generalisierten Koordinate konjugierte (= zugeordnete) generalisierte Impuls ist eine Konstante der Bewegung.
Für ein Teilchen im schwerefreien Raum (§3.2.3, erstes Beispiel) sind nach Gl. (3.31)
alle drei kartesischen Koordinaten x, y, z zyklisch. Folglich sind die konjugierten
Impulse px , py , pz Erhaltungsgrößen. Aufgrund von
px =
104
∂L
= mẋ,
∂ ẋ
py =
∂L
= mẏ,
∂ ẏ
pz =
∂L
= mż
∂ ż
(3.50)
3.2 Lagrangesche Gleichungen
stimmen sie mit den gewöhnlichen Impulsen überein.
Ein weiteres instruktives Beispiel ist die in §1.7 behandelte Zentralbewegung. Geeignete generalisierte Koordinaten sind die ebenen Polarkoordinaten r, ϕ, für welche
die kinetische Energie
´
m
m³ 2
T = (ṙ er + rϕ̇ eϕ )2 =
ṙ + r2 ϕ̇2
(3.51)
2
2
ist. Mit dem Zentralpotential V (r) lautet die Lagrange-Funktion der Zentralbewegung
´
m³ 2
L=T −V =
ṙ + r2 ϕ̇2 − V (r),
(3.52)
2
und man erkennt, daß die Koordinate ϕ zyklisch ist. Der konjugierte Impuls pϕ ist
also eine Konstante der Bewegung:
pϕ =
∂L
= mr2 ϕ̇ = const.
∂ ϕ̇
(3.53)
Nach Gl. (1.286) ist pϕ gleich dem Drehimpuls der Zentralbewegung. Somit bringt
(3.53) die Erhaltung des Drehimpulses bei Zentralbewegungen zum Ausdruck.
Energieerhaltung in der Lagrangeschen Formulierung
Wir definieren eine neue Funktion H als
H = H(q1 , q2 , . . . , qf , q̇1 , q̇2 , . . . , q̇f , t) =
X ∂L
j
=
X
∂ q̇j
q̇j − L
pj q̇j − L.
(3.54)
∂L
.
∂t
(3.55)
j
Die zeitliche Änderung von H ist
Ḣ =
X
(ṗj q̇j + pj q̈j ) − L̇
j
=
X
Ã
j
=
X
!
∂L
∂L
∂L
ṗj q̇j + pj q̈j −
q̇j −
q̈j −
∂qj
∂ q̇j
∂t
(
j
q̇j
Ã
∂L
ṗj −
∂qj
Ã
!
+ q̈j
∂L
pj −
∂ q̇j
!)
−
Die erste Klammer verschwindet aufgrund der Lagrange-Gleichungen (3.48), die
zweite aufgrund der Definition (3.47), und es verbleibt
Ḣ = −
∂L
.
∂t
(3.56)
Falls die Lagrange-Funktion nicht explizit von der Zeit abhängt, also
L = T − V = L(q1 , q2 , . . . , qf , q̇1 , q̇2 , . . . , q̇f )
(3.57)
105
3 Analytische Mechanik
ist, folgt aus (3.56) sofort
Ḣ = 0.
(3.58)
Somit gilt ein weiterer Erhaltungssatz:
Falls die Lagrange-Funktion L nicht explizit zeitabhängig ist, ist die in
Gl. (3.54) definierte Funktion H eine Konstante der Bewegung.
Das ist insbesondere immer dann erfüllt, wenn die Transformationsgleichungen (3.5),
welche den Zusammenhang zwischen den Ortsvektoren xi und den generalisierten
Koordinaten qj angeben, nicht explizit von der Zeit abhängen. Es ist aber möglich,
daß die Transformationen (3.5) die Zeit enthalten, die Lagrange-Funktion jedoch
nicht (siehe §3.2.3, zweites Beispiel “Perle auf rotierendem Drahtkreis”). Auch dann
ist H eine Erhaltungsgröße.
Was ist die physikalische Bedeutung von H? Um das herauszufinden, leiten wir
zunächst einen Ausdruck für die kinetische Energie T her. Mit der Hilfsformel (3.16)
für die Geschwindigkeiten v i ist
T =
2
X mi X ∂xi
∂x
i
q̇j +
i
=
X mi
i
=
2
= a+
Ã
2
X mi
i
j
Ã
2
X
∂xi
∂t
∂xi
∂t
∂qj
!2
+
X
X mi ∂xi ∂xi
∂xi ∂xi
·
q̇j +
·
q̇j q̇k
∂qj ∂t
∂qk
i,j,k 2 ∂qj
mi
i,j
!2
aj q̇j +
j
∂t
+
Ã
X X
j
X
i
∂xi ∂xi
mi
·
∂qj ∂t
ajk q̇j q̇k .
!
q̇j +
Ã
X X mi ∂xi
j,k
i
∂xi
·
2 ∂qj ∂qk
!
q̇j q̇k
(3.59)
j,k
Die Definition der Koeffizienten a, aj und ajk folgt dabei aus dem Vergleich der
letzten mit der vorletzten Zeile; sie sind offensichtlich von den generalisierten Geschwindigkeiten q̇j unabhängig.
Falls nun die Transformationen (3.5) die Zeit nicht explizit enthalten, mit anderen
Worten ∂xi /∂t = 0 ist, sind nur die ajk von Null verschieden, und (3.59) vereinfacht
sich zur quadratischen Form
T =
X
ajk q̇j q̇k .
(3.60)
j,k
Wir verwenden dieses Ergebnis, um die Definition (3.54) für H umzuformen. Da das
Potential V nicht von den q̇j abhängen darf, ist
H =
X ∂L
j
106
∂ q̇j
q̇j − L =
X ∂T
j
∂ q̇j
q̇j − L
3.2 Lagrangesche Gleichungen
=
X
j
=
X
q̇j
j
=
X
(akl δkj q̇l + akl q̇k δlj ) − L
k,l
X
Ã
q̇j
j
= 2
∂ X
q̇j
akl q̇k q̇l − L
∂ q̇j k,l
X
ajl q̇l +
l
X
X
!
akj q̇k − L
k
akj q̇j q̇k − L
j,k
= 2T − L = 2T − (T − V ) = T + V.
(3.61)
Für zeitunabhängige Transformationen (3.5) ist H also gleich der Gesamtenergie des
Systems.
Zusammenfassend haben wir also folgendes Resultat:
1. Sind die Transformationen (3.5) von den Ortsvektoren auf die generalisierten Koordinaten nicht explizit zeitabhängig (und somit auch die LagrangeFunktion L nicht), dann ist H erhalten und gleich der Gesamtenergie des
Systems.
2. Sind die Transformationen (3.5) explizit zeitabhängig, L aber nicht, dann ist
H erhalten, aber nicht gleich der Gesamtenergie des Systems.
3. Sind die Transformationen (3.5) und L explizit zeitabhängig, dann ist H nicht
erhalten und auch nicht gleich der Gesamtenergie des Systems.
Im Fall 1 entspricht der Erhaltungssatz für H also der bereits bekannten Energieerhaltung konservativer Systeme,
T1 + V 1 = T2 + V 2
⇐⇒
T + V = E = const.
(3.62)
In den Fällen 2 und 3 wird durch H kein Energiesatz beschrieben. Jedoch muß
nach §2.1.3 ein solcher auch für diese Fälle existieren. Dann ist aber zu beachten, daß zusätzlich zu dem Potential V der angewendeten Kräfte nichtkonservative
(z)
Zwangskräfte F i auf die Massenpunkte des betrachteten Systems wirken können.
Obgleich deren virtuelle Arbeit (bei instantanen Verrückungen) verschwindet, kann
deren wirkliche Arbeit (bei realen Verrückungen, die eine bestimmte Zeit benötigen)
bei zeitabhängigen Transformationen (3.5) von Null verschieden sein. Der Energiesatz für die Fälle 2 und 3 ist demnach [vgl. Gln. (2.25), (2.36)]
T2 + V2 − (T1 + V1 ) = W (z) ,
(3.63)
wobei W (z) die von den Zwangskräften geleistete Arbeit bedeutet. Dieser Satz ist in
der Praxis wenig hilfreich, da W (z) von der Bewegung selbst abhängt.
107
3 Analytische Mechanik
3.2.5 Invarianz bezüglich Punkttransformationen
Wir definieren eine Punkttransformation als eine Transformation von einem Satz
generalisierter Koordinaten qj auf einen anderen Satz q̃k :
qj = qj (q̃1 , . . . , q̃f , t),
j = 1 . . . f.
(3.64)
Dabei sei die Funktionalmatrix ∂qj /∂ q̃k der Transformation zu jeder Zeit t regulär,
Ã
∂qj
J = det
∂ q̃k
!
6= 0,
(3.65)
so daß auch die inverse Transformation
q̃k = q̃k (q1 , . . . , qf , t),
k = 1 . . . f,
(3.66)
existiert. Beispiele für derartige Punkttransformationen sind Drehungen oder Streckungen der Koordinaten.
Durch Differentiation von (3.64) bzw. (3.66) nach der Zeit erhält man die zugehörigen
Transformationen der Geschwindigkeiten:
q̇j =
X ∂qj
k
∂qj
q̃˙ k +
,
∂ q̃k
∂t
j = 1 . . . f,
(3.67)
k = 1 . . . f.
(3.68)
sowie
q̃˙ k =
X ∂ q̃k
j
∂qj
q̇j +
∂ q̃k
,
∂t
Hieraus folgen sofort die Beziehungen
∂ q̃˙ k
∂ q̃k
=
.
∂ q̇j
∂qj
∂ q̇j
∂qj
=
,
˙
∂ q̃k
∂ q̃ k
(3.69)
Weiterhin gilt die Hilfsformel
d
dt
⇒
Ã
∂ q̃k
∂qj
d
dt
!
=
X ∂ 2 q̃k
l
Ã
∂ q̃k
∂qj
∂ 2 q̃k
∂
q̇l +
=
∂ql ∂qj
∂t ∂qj
∂qj
!
=
(
X ∂ q̃k
l
∂ q̃k
q̇l +
∂ql
∂t
∂ q̃˙ k
.
∂qj
)
(3.70)
Durch Einsetzen der Transformationen (3.64) und (3.67) läßt sich die LagrangeFunktion L bzgl. der qj in die Lagrange-Funktion L̃ bzgl. der q̃k umrechnen:
³
L(qj , q̇j , t) = L qj (q̃k , t),
k
108
∂qj ´
q̃˙ k +
, t = L̃(q̃k , q̃˙ k , t).
∂ q̃k
∂t
X ∂qj
(3.71)
3.3 Hamiltonsche Mechanik
Wir untersuchen nun das Transformationsverhalten der Lagrangeschen Gleichungen
(3.28) bezüglich Punkttransformationen. Mit der Kettenregel der Differentialrechnung sowie (3.69), (3.70) rechnet man für die beiden Terme von (3.28)
d
dt
Ã
∂L
∂ q̇j
!
Ã
d X ∂ L̃ ∂ q̃˙ k
=
dt k ∂ q̃˙ k ∂ q̇j
X
(
Ã
∂ L̃
∂ q̃˙ k
Ã
d X ∂ L̃ ∂ q̃k
=
dt k ∂ q̃˙ k ∂qj
!
Ã
∂ L̃ d ∂ q̃k
+
=
∂ q̃˙ k dt ∂qj
k
(
)
Ã
!
X ∂ q̃k d
∂ L̃
∂ L̃ ∂ q̃˙ k
=
,
+
∂qj dt ∂ q̃˙ k
∂ q̃˙ k ∂qj
k
und
∂ q̃k d
∂qj dt
!
(
!
!)
(3.72)
)
∂L X ∂ L̃ ∂ q̃k
∂ L̃ ∂ q̃˙ k
=
+
.
∂qj
∂ q̃k ∂qj
∂ q̃˙ k ∂qj
k
(3.73)
Einsetzen dieser Resultate in die Lagrangeschen Gleichungen (3.28) ergibt
X
(
k
∂ q̃k d
∂qj dt
X ∂ q̃k
⇒
k
Ã
∂ L̃
∂ q̃˙ k
"
d
·
∂qj
dt
!
Ã
∂ L̃ ∂ q̃k
∂ L̃ ∂ q̃˙ k
∂ L̃ ∂ q̃˙ k
−
−
+
∂ q̃k ∂qj
∂ q̃˙ k ∂qj
∂ q̃˙ k ∂qj
∂ L̃
∂ q̃˙ k
!
)
=0
#
∂ L̃
−
= 0.
∂ q̃k
(3.74)
Hierbei handelt es sich um ein homogenes lineares Gleichungssystem Ax = 0 mit
regulärer Matrix A, wenn man
Ajk
∂ q̃k
=
,
∂qj
d
xk =
dt
Ã
∂ L̃
∂ q̃˙ k
!
−
∂ L̃
∂ q̃k
(3.75)
identifiziert. Da ein derartiges System nur die triviale Lösung x = 0 besitzt, folgt
d
dt
Ã
∂ L̃
∂ q̃˙ k
!
−
∂ L̃
= 0,
∂ q̃k
k = 1 . . . f.
(3.76)
Aus den Lagrangeschen Gleichungen (3.28), welche sich auf den Koordinatensatz
qj beziehen, folgen somit formidentische Gleichungen bezüglich der transformierten Koordinaten q̃k . Mit anderen Worten sind also die Lagrangeschen Gleichungen
invariant gegen Punkttransformationen gemäß der Definition (3.64), (3.65).
3.3 Hamiltonsche Mechanik
3.3.1 Hamiltonsche Gleichungen
Die Lagrange-Funktion L ist im allgemeinen eine Funktion der f generalisierten
Koordinaten und Geschwindigkeiten sowie der Zeit t:
L = L(qj , q̇j , t).
(3.77)
109
3 Analytische Mechanik
Ihr totales Differential ist demnach und unter Verwendung von Gln. (3.47), (3.48)
X ∂L
dL =
∂qj
j
X
=
X ∂L
dqj +
∂ q̇j
j
ṗj dqj +
X
j
dq̇j +
pj dq̇j +
j
∂L
dt
∂t
∂L
dt.
∂t
(3.78)
Damit erhält man für das totale Differential der in Gl. (3.54) definierten Funktion
H(qj , q̇j , t):
dH
X
= d pj q̇j − dL
j
X
=
pj dq̇j +
X
j
X
X
∂L
q̇j dpj − ṗj dqj +
pj dq̇j +
dt
j
= −
X
ṗj dqj +
j
j
X
q̇j dpj −
j
j
∂t
∂L
dt.
∂t
(3.79)
Dieses Resultat legt nahe, H nicht wie bisher als Funktion H(qj , q̇j , t) der Koordinaten und Geschwindigkeiten, sondern als Funktion
H = H(qj , pj , t)
(3.80)
der f Koordinaten und Impulse aufzufassen. Mit diesen Abhängigkeiten bezeichnet
man H als Hamilton-Funktion.
Transformationen des Typs (3.54), welche also offenbar zu einem Wechsel der natürlichen Variablen einer Funktion führen (hier von q̇j auf pj ), bezeichnet man ganz allgemein als Legendre-Transformationen. Sie spielen beispielsweise in der Thermodynamik bei der Konstruktion der thermodynamischen Potentiale freie Energie, Enthalpie
und Gibbssche freie Energie (freie Enthalpie) aus der inneren Energie eine wichtige
Rolle.
Mit Gl. (3.80) ist das totale Differential der Hamilton-Funktion
dH =
X ∂H
j
∂qj
dqj +
X ∂H
j
∂pj
dpj +
∂H
dt,
∂t
(3.81)
und Vergleich mit (3.79) führt auf die Beziehungen
q̇j =
ṗj
∂H
,
∂pj
∂H
,
= −
∂qj
(j = 1 . . . f ),
(3.82)
sowie
∂H
∂L
=− .
∂t
∂t
110
(3.83)
3.3 Hamiltonsche Mechanik
Die Gleichungen (3.82) heißen Hamiltonsche Gleichungen oder auch kanonische Gleichungen; sie sind vollständig äquivalent zu den Lagrangeschen Gleichungen (3.28).
Es besteht jedoch ein wichtiger struktureller Unterschied: Im Gegensatz zu den Lagrangeschen Gleichungen, welche f Bewegungsgleichungen von zweiter Ordnung für
die Koordinaten qj darstellen, haben wir hier 2f Bewegungsgleichungen von erster
Ordnung für die Koordinaten qj und Impulse pj . Die Reduktion der Ordnung des
erhaltenen Differentialgleichungssystems wird also mit einem Anstieg der Anzahl der
Unbekannten erkauft.
3.3.2 Eigenschaften der Hamilton-Funktion
In §3.2.4 wurden zyklische Koordinaten als solche definiert, die in der LagrangeFunktion L nicht vorkommen, und es wurde gefolgert, daß die zu zyklische Koordinaten konjugierten Impulse Konstanten der Bewegung sind. Wenn also beispielsweise
qf zyklisch ist, dann ist
L = L(q1 , . . . , qf −1 , q̇1 , . . . , q̇f −1 , q̇f , t)
(3.84)
und
pf = α = const
⇒
ṗf = 0
⇒
∂H
= −ṗf = 0.
∂qf
(3.85)
Die zyklische Koordinate qf kommt also auch in der Hamilton-Funktion H nicht vor,
und H kann folglich dargestellt werden als
H = H(q1 , . . . , qf −1 , p1 , . . . , pf −1 , α, t).
(3.86)
Der Vergleich von (3.84) mit (3.86) zeigt, daß der Hamilton-Formalismus ganz offenbar bei der Behandlung von Problemen mit zyklischen Variablen gegenüber dem
Lagrange-Formalismus Vorteile hat. In L tauchen nämlich im allgemeinen alle generalisierten Geschwindigkeiten (auch die der zyklischen Variablen) auf, wohingegen
die zyklischen Koordinaten in H gewissermaßen ignoriert werden können, denn sie
sind nur in Form der zeitlich konstanten generalisierten Impulse enthalten, die aus
den Anfangsbedingungen bestimmt sind. Die zeitliche Entwicklung der zyklischen
Koordinaten folgt gemäß (3.82)1 aus der Beziehung
∂H
.
(3.87)
∂α
Das Zeitverhalten der Hamilton-Funktion wurde im wesentlichen bereits in §3.2.4
behandelt. Mit Gln. (3.56) und (3.83) findet man
q̇f =
∂H
.
(3.88)
∂t
Im Falle einer nicht explizit von der Zeit abhängigen Hamilton-Funktion, was gemäß
Gl. (3.83) äquivalent zu einer Lagrange-Funktion ohne explizite Zeitabhängigkeit ist,
folgt die Erhaltung von H:
Ḣ =
Ḣ = 0.
(3.89)
111
3 Analytische Mechanik
Sind die Transformationen (3.5) zwischen den xi und den qj zeitunabhängig, dann
ist nach §3.2.4 H die gesamte Energie T + V des Systems. Weil dann automatisch
auch die Zeitunabhängigkeit von H gegeben ist, gilt in diesem Fall zusammengefaßt
H = T + V,
Ḣ = 0.
(3.90)
3.3.3 Anwendungen der Hamiltonschen Gleichungen
Die formale Vorgehensweise bei der Anwendung des Hamiltonschen Formalismus auf
konkrete mechanische Probleme besteht darin, daß im ersten Schritt die LagrangeFunktion L = L(qj , q̇j , t) aufgestellt werden muß. Gl. (3.47) ergibt daraus die generalisierten Impulse pj , mit deren Hilfe nach Definition (3.54) die Hamilton-Funktion
als H = H(qj , pj , t) berechnet werden kann. Einsetzen in die kanonischen Gleichungen (3.82) ergibt schließlich 2f Bewegungsgleichungen von erster Ordnung für das
betrachtete Problem.
Dieser recht aufwendige Weg kann in vielen Fällen massiv abgekürzt werden. Wenn
H der Gesamtenergie T + V entspricht und weiterhin die Ausdrücke für die generalisierten Impulse von vornherein klar sind (z. B. gewöhnlicher linearer Impuls,
Drehimpuls), muß lediglich die Gesamtenergie als Funktion der generalisierten Koordinaten umd Impulse aufgestellt werden, um die Hamilton-Funktion zu erhalten.
Teilchen im schwerefreien Raum
Wie bereits beim Lagrange-Formalismus betrachten wir als erstes, einfaches Beispiel das Problem des einzelnen Massenpunktes (Masse m) im schwerefreien Raum
(V = 0), wobei die kartesischen Koordinaten x, y, z als generalisierte Koordinaten
verwendet werden.
Nach Gl. (3.31) ist
L=T =
m 2
(ẋ + ẏ 2 + ż 2 ),
2
(3.91)
und die generalisierten Impulse entsprechen den Komponenten des gewöhnlichen
Impulses p:
px =
∂L
= mẋ,
∂ ẋ
py =
∂L
= mẏ,
∂ ẏ
pz =
∂L
= mż.
∂ ż
(3.92)
Die Hamilton-Funktion, welche hier gleich der Gesamtenergie ist, lautet somit
m
H=T =
2
Ã
p2y
p2z
p2x
+
+
m2 m2 m2
!
=
p2x + p2y + p2z
.
2m
(3.93)
Offenbar sind alle drei Koordinaten zyklisch, so daß die drei Impulse Konstanten
der Bewegung sein müssen:
px (t) = p0x ,
112
py (t) = p0y ,
pz (t) = p0z .
(3.94)
3.3 Hamiltonsche Mechanik
Das ist auch die Aussage der kanonischen Gleichungen (3.82)2 . Die verbleibenden
kanonischen Gleichungen (3.82)1 ergeben die zeitliche Entwicklung von x, y, z:
∂H
p0
ẋ =
= x,
∂px
m
p0y
∂H
ẏ =
= ,
∂py
m
ż =
∂H
p0
= z.
∂pz
m
(3.95)
Wie gehabt ist das Ergebnis eine geradlinig-gleichförmige Bewegung.
Massenpunkt in parabolischer Schale
Ein Massenpunkt bewege sich gemäß Abb. 3.3 im homogenen Schwerefeld in einer
parabolischen Schale der Form
z = k(x2 + y 2 ) = kr2
(k konstant).
(3.96)
Abbildung 3.3: Massenpunkt in parabolischer Schale.
Das System hat zwei Freiheitsgrade, und als generalisierte Koordinaten eignen sich
die ebenen Polarkoordinaten (r, ϕ) der Projektion der Position des Massenpunktes
auf die x-y-Ebene (Abb. 3.3). Demnach ist die Transformation x = x(r, ϕ) zeitunabhängig, und die Hamilton-Funktion entspricht der Gesamtenergie.
Die Geschwindigkeit des Massenpunktes läßt sich schreiben als
v = ṙ er + rϕ̇ eϕ + ż ez .
(3.97)
Damit ist
´
´
m³ 2
m³ 2
ṙ + r2 ϕ̇2 + ż 2 =
ṙ + r2 ϕ̇2 + 4k 2 r2 ṙ2 ,
2
2
und weiterhin
T =
(3.98)
V = mgz = mgkr2 .
(3.99)
Die Lagrange-Funktion lautet also
o
mn 2
L=T −V =
ṙ (1 + 4k 2 r2 ) + r2 ϕ̇2 − mgkr2 ,
2
woraus die generalisierten Impulse berechnet werden können:
pr =
∂L
= mṙ (1 + 4k 2 r2 ),
∂ ṙ
pϕ =
∂L
= mr2 ϕ̇.
∂ ϕ̇
(3.100)
(3.101)
113
3 Analytische Mechanik
Man erkennt, daß in diesem Beispiel pr nicht gleich dem radialen Impuls ist, sondern aufgrund des Vorhandenseins der Schale eine Modifizierung erleidet. Dagegen
entspricht pϕ einfach dem Drehimpuls um die z-Achse.
Mit (3.98), (3.99) und (3.101) kann nun die Hamilton-Funktion aufgestellt werden:
H =T +V
=
o
mn 2
ṙ (1 + 4k 2 r2 ) + r2 ϕ̇2 + mgkr2
2
=
p2ϕ
p2r
+
+ mgkr2 .
2m (1 + 4k 2 r2 ) 2mr2
(3.102)
Offensichtlich ist die Koordinate ϕ zyklisch, so daß pϕ eine Konstante der Bewegung
darstellt:
pϕ (t) = p0ϕ .
(3.103)
Die zugehörige Evolutionsgleichung folgt aus der kanonischen Gleichung (3.82)1 :
ϕ̇ =
p0
∂H
= ϕ2 .
∂pϕ
mr
(3.104)
Es verbleibt die Auswertung der kanonischen Gleichungen (3.82) für die Koordinate
r:
ṙ =
∂H
∂pr
∂H
ṗr = −
∂r
=
pr
,
m (1 + 4k 2 r2 )
(p0ϕ )2
8k 2 r
p2r
=
+
− 2mgkr.
2m (1 + 4k 2 r2 )2
mr3
(3.105)
Das ist ein allerdings ziemlich unangenehmes gekoppeltes Differentialgleichungssystem für die Radialbewegung des Massenpunktes.
Für kleine Auslenkungen, beschrieben durch
kr ¿ 1,
pr
¿
m
r
g
,
k
(3.106)
vereinfachen sich diese Bewegungsgleichungen zu
pr
ṙ = ,
m
(p0ϕ )2
ṗr =
− 2mgkr.
mr3
(3.107)
Differentiation der ersten Gleichung nach der Zeit und Einsetzen in die zweite ergibt
eine Differentialgleichung zweiter Ordnung für r:
(p0ϕ )2
mr̈ =
− 2mgkr.
mr3
(3.108)
Das entspricht der radialen Bewegungsgleichung einer Zentralbewegung mit linearem
anziehenden Kraftgesetz
F (r) = −2mgkr er ,
114
bzw. f (r) = 2mgkr.
(3.109)
3.3 Hamiltonsche Mechanik
3.3.4 Routhsches Verfahren
Wir haben gesehen, daß der Hamilton-Formalismus bei der Behandlung von zyklischen Variablen dem Lagrange-Formalismus überlegen ist. Im allgemeinen verhält
es sich jedoch umgekehrt; praktische Probleme sind in der Regel mit dem Weg über
die Lagrange-Funktion und die Lagrangeschen Gleichungen schneller und einfacher
zu lösen.
Das Routhsche Verfahren stellt eine Methode dar, die Vorteile beider Verfahren zu
vereinen. Dazu wird die Legendre-Transformation nur auf die zyklischen Variablen
der Lagrange-Funktion angewendet. Seien etwa die Koordinaten qs+1 . . . qf zyklisch,
dann ist die Routhsche Funktion R definiert als
R = R(q1 , . . . , qf , q̇1 , . . . , q̇s , ps+1 , . . . , pf , t) =
f
X
∂L
j=s+1
=
f
X
∂ q̇j
q̇j − L
pj q̇j − L.
(3.110)
j=s+1
Das totale Differential von R ist dann analog zum totalen Differential der HamiltonFunktion (3.79)
f
X
f
X
f
X
f
X
∂L
pj dq̇j +
q̇j dpj − ṗj dqj +
pj dq̇j +
dt
dR =
∂t
j=1
j=s+1
j=1
j=s+1
= −
f
X
ṗj dqj −
j=1
s
X
pj dq̇j +
j=1
f
X
q̇j dpj −
j=s+1
∂L
dt.
∂t
(3.111)
Es folgen sofort die Relationen
∂L
∂R
= −ṗj = −
,
∂qj
∂qj
∂R
∂L
= −pj = −
,
∂ q̇j
∂ q̇j
∂R
= −ṗj ,
∂qj
∂R
= q̇j ,
∂pj
j = 1 . . . s,
j = s + 1 . . . f,
(3.112)
(3.113)
sowie
∂L
∂R
=− .
∂t
∂t
(3.114)
Aus Gl. (3.112) folgt sofort, daß die Lagrangeschen Gleichungen für j = 1 . . . s (die
nicht-zyklischen Variablen) auch für die Routhsche Funktion R gelten:
d
dt
Ã
∂R
∂ q̇j
!
−
∂R
= 0,
∂qj
j = 1 . . . s.
(3.115)
115
3 Analytische Mechanik
Dagegen entsprechen die Beziehungen (3.113) den Hamiltonschen (kanonischen)
Gleichungen (3.82). Da wir aber die Variablen qs+1 . . . qf als zyklisch vorausgesetzt
haben, sind deren konjugierte Impulse Konstanten der Bewegung:
pj (t) = αj = const,
j = s + 1 . . . f.
(3.116)
Anhand von (3.113)1 erkennt man, daß die zyklischen Variablen in der Routhschen
Funktion R ebenfalls nicht explizit vorkommen. [Man kann das natürlich auch direkt
an ihrer Definition (3.110) sehen.] Sie sind also nur in Form der konstanten α’s
vorhanden, welche aus den Anfangsbedingungen bestimmt sind:
R = R(q1 , . . . , qs , q̇1 , . . . , q̇s , αs+1 , . . . , αf , t).
(3.117)
Die Lagrange-Gleichungen (3.115) können somit völlig unabhängig vom Verhalten
der zyklischen Koordinaten für q1 . . . qs integriert werden, wobei lediglich die konstanten α’s als Parameter auftreten. Die zeitliche Evolution der zyklischen Koordinaten kann anschließend aus (3.113)2 bestimmt werden:
q̇j =
∂R
,
∂αj
j = s + 1 . . . f.
(3.118)
Beispiel: Kepler-Problem
Entsprechend §1.7.4 bewege sich ein Massenpunkt der Masse m in einem Kraftfeld
mit dem Potential
k
V (r) = − .
r
(3.119)
Nach Gl. (3.52) ist in ebenen Polarkoordinaten r, ϕ
L=T −V =
´
m³ 2
k
ṙ + r2 ϕ̇2 + .
2
r
(3.120)
Die Koordinate ϕ ist zyklisch, und deren konjugierter Impuls pϕ , welcher dem Drehimpuls des Massenpunktes um das Kraftzentrum entspricht, ist konstant:
pϕ =
∂L
= mr2 ϕ̇ = l = const.
∂ ϕ̇
(3.121)
Die zugehörige Routhsche Funktion lautet also
´
m³ 2
k
ṙ + r2 ϕ̇2 −
2 Ã
! r
2
2
l
m 2
l
k
=
−
ṙ + 2 2 − .
2
mr
2
mr
r
2
m
l
k
= − ṙ2 +
− .
2
2
2mr
r
R(r, ṙ, l) = pϕ ϕ̇ −
116
(3.122)
3.3 Hamiltonsche Mechanik
Die Bewegungsgleichung für die Radialbewegung entspricht der Lagrangeschen Gleichung für r, welche sich durch Einsetzen dieser Routhschen Funktion in Gl. (3.115)
ergibt. Sie ist in der Tat von der zyklischen Koordinate ϕ entkoppelt:
mr̈ −
l2
k
+ 2 = 0.
3
mr
r
(3.123)
Nach der Bestimmung von r(t) aus dieser Gleichung folgt die zeitliche Entwicklung
von ϕ aus Gl. (3.118):
ϕ̇ =
∂R
l
=
.
∂l
mr2
(3.124)
3.3.5 Poisson-Klammern
Gegeben sei wie gehabt ein konservatives holonomes System von n Massenpunkten
mit f Freiheitsgraden. Weiterhin seien u und v zwei beliebige physikalische Größen
(z. B. Impuls, Drehimpuls, kinetische Energie, Hamilton-Funktion...), die sich als
Funktionen der zugehörigen generalisierten Koordinaten qj und Impulse pj sowie
evtl. der Zeit t darstellen lassen: u = u(qj , pj , t), v = v(qj , pj , t). Dann ist die
Poisson-Klammer von u und v definiert als
{u, v} =
f
X
Ã
j=1
∂u ∂v
∂u ∂v
−
∂pj ∂qj
∂qj ∂pj
!
.
(3.125)
Die Poisson-Klammer hat folgende Eigenschaften, die man direkt an dieser Definition
ablesen kann:
{u, u}
{u, v}
{u, (v1 + v2 )}
{u, λv}
{u, v1 v2 }
∂
{u, v}
∂t
=
=
=
=
=
0,
−{v, u},
{u, v1 } + {u, v2 },
λ {u, v},
{u, v1 } v2 + {u, v2 } v1 ,
∂u
∂v
= { , v} + {u,
}.
∂t
∂t
(3.126)
Etwas aufwendiger (Übung!) ist der Nachweis der Jacobi-Identität
{u, {v, w}} + {v, {w, u}} + {w, {u, v}} = 0.
(3.127)
Weiterhin gelten die Beziehungen
{u, qk } =
∂u
,
∂pk
{u, pk } = −
∂u
,
∂qk
(3.128)
und
{qk , ql } = 0,
{pk , pl } = 0,
{pk , ql } = δkl ,
(3.129)
117
3 Analytische Mechanik
von denen wir exemplarisch die erste und letzte beweisen:
{u, qk } =
X
j
{pk , ql } =
X
Ã
Ã
j
∂u ∂qk
∂u ∂qk
−
∂pj ∂qj
∂qj ∂pj
∂pk ∂ql
∂pk ∂ql
−
∂pj ∂qj
∂qj ∂pj
!
=
X ∂u
j
!
=
X
∂pj
δkj =
∂u
,
∂pk
δkj δlj = δkl .
(3.130)
(3.131)
j
Wegen (3.128) ist speziell
{H, qj } =
∂H
,
∂pj
{H, pj } = −
∂H
,
∂qj
(3.132)
so daß sich die Hamiltonschen Gleichungen (3.82) selbst durch Poisson-Klammern
ausdrücken lassen:
q̇j = {H, qj },
ṗj = {H, pj }.
(3.133)
Man findet darüber hinaus, daß aufgrund von (3.82) sogar für jede beliebige Größe
g = g(qj , pj , t) eine ähnliche Evolutionsgleichung gilt:
Ã
∂g X ∂g
∂g
ġ =
+
q̇j +
ṗj
∂t
∂qj
∂pj
j
Ã
!
∂g ∂H
∂g X ∂g ∂H
+
−
=
∂t
∂qj ∂pj
∂pj ∂qj
j
=
∂g
+ {H, g}.
∂t
!
(3.134)
Für Größen g, die ohne explizite Zeitabhängigkeit von den Koordinaten qj und Impulsen pj abhängen, kann man daraus den Erhaltungssatz
ġ = 0
⇐⇒
{H, g} = 0
(3.135)
ablesen. In Worten:
Eine Größe g(qj , pj ) ist genau dann eine Konstante der Bewegung, wenn
ihre Poisson-Klammer mit der Hamilton-Funktion verschwindet.
Des weiteren gilt für zwei Erhaltungsgrößen u und v das Poissonsche Theorem:
Die Poisson-Klammer aus zwei Erhaltungsgrößen u und v ist wieder eine
Erhaltungsgröße.
118
3.3 Hamiltonsche Mechanik
Das beweist man mit (3.126), der Jacobi-Identität (3.127) und der Evolutionsgleichung (3.134) wie folgt: Sei u̇ = 0, v̇ = 0, und w = {u, v}. Dann ist
ẇ =
=
∂w
+ {H, w}
∂t
∂
{u, v} + {H, {u, v}}
∂t
= {
∂u
∂v
, v} + {u,
} − {u, {v, H}} − {v, {H, u}}
∂t
∂t
= {
∂v
∂u
+ {H, u}, v} + {u,
+ {H, v}}
∂t
∂t
= {u̇, v} + {u, v̇} = 0.
(3.136)
Beispiel: Harmonischer Oszillator
Die Hamiltonfunktion des eindimensionalen harmonischen Oszillators (freier Federschwinger ohne Dämpfung, Federkonstante c) ist
p2
c x2
p2
mω02 x2
H(x, p) =
+
=
+
2m
2
2m
2
(p = mẋ);
(3.137)
vgl. §1.6.1. Die kanonischen Gleichungen (3.133) in der Formulierung mit PoissonKlammern lauten damit
1
mω02 2
2
ẋ = {H, x} =
{p , x} +
{x , x},
2m
2
1
mω02 2
ṗ = {H, p} =
{p2 , p} +
{x , p}.
2m
2
(3.138)
Mit Gln. (3.126), (3.129) folgt weiter
1
mω02
p
· 2p {p, x} +
· 2x {x, x} =
,
2m
2
m
mω02
1
· 2p {p, p} +
· 2x {x, p} = −mω02 x.
ṗ =
2m
2
ẋ =
(3.139)
Durch Differenzieren der ersten Gleichung nach der Zeit und Einsetzen der zweiten
Gleichung ergibt sich daraus
ẍ =
ṗ
= −ω02 x
m
⇒
ẍ + ω02 x = 0,
(3.140)
also tatsächlich die wohlbekannte Bewegungsgleichung des harmonischen Oszillators.
119
3 Analytische Mechanik
Poisson-Klammern des Drehimpulses in kartesischen Koordinaten
Wir betrachten einen einzelnen Massenpunkt, der sich frei (ohne Zwangsbedingungen) in einem konservativen Kraftfeld des Potentials V (x) bewegt. Als generalisierte
Koordinaten seien die kartesischen Koordinaten x, y, z (bzw. x1 , x2 , x3 ) verwendet,
so daß die generalisierten Impulse den kartesischen Komponenten des gewöhnlichen
Impulses p = mv entsprechen.
Der auf den Ursprung bezogene Drehimpuls dieses Teilchens ist dann
L = x × p,
bzw. Lj =
X
εjmn xm pn .
(3.141)
m,n
Dabei sind die εjmn die Komponenten des vollständig antisymmetrischen Tensors
dritter Stufe mit
j, m, n zyklisch,
1,
j, m, n antizyklisch,
εjmn = −1,
(3.142)
0,
sonst (zwei gleiche Indices).
Mit den Beziehungen (3.128) findet man die Poisson-Klammern für den Drehimpuls
mit den Koordinaten:
X
X
∂Lj
∂ X
{Lj , xk } =
=
εjmn xm pn =
εjmn xm δkn =
εjmk xm
∂pk
∂pk m,n
m,n
m
= −
X
εjkm xm
m
⇒
0,
{Lj , xk } = −xl ,
xl ,
j = k,
j, k, l zyklisch,
j, k, l antizyklisch.
(3.143)
Eine entsprechende Rechnung liefert die Poisson-Klammern mit den Impulsen:
⇒
0,
{Lj , pk } = −pl ,
pl ,
j = k,
j, k, l zyklisch,
j, k, l antizyklisch.
(3.144)
Wir berechnen nun die Poisson-Klammern der Drehimpulskomponenten miteinander. Aufgrund (3.126) ist klar, daß
{Lj , Lj } = 0,
j = 1, 2, 3.
(3.145)
Unter Verwendung weiterer Relationen von (3.126) sowie den Ergebnissen (3.143),
(3.144) erhält man
{L1 , L2 } = {L1 ,
=
X
m,n
X
m,n
ε2mn xm pn } =
³
X
ε2mn {L1 , xm pn }
m,n
ε2mn {L1 , xm } pn + {L1 , pn } xm
³
´
´
³
´
= ε231 {L1 , x3 } p1 + {L1 , p1 } x3 + ε213 {L1 , x1 } p3 + {L1 , p3 } x1
= x2 p1 − x1 p2
= −L3 .
(3.146)
120
3.3 Hamiltonsche Mechanik
Entsprechend ergibt sich
{L2 , L3 } = −L1 ,
{L3 , L1 } = −L2 ,
(3.147)
so daß zusammenfassend gilt:
⇒
0,
{Lj , Lk } = −Ll ,
Ll ,
j = k,
j, k, l zyklisch,
j, k, l antizyklisch.
(3.148)
Weiterhin verschwindet die Poisson-Klammer des Betragsquadrates L2 mit jeder
Komponente:
{L2 , Lj } = 0,
j = 1, 2, 3.
(3.149)
Wir zeigen das mit (3.126) und (3.148) exemplarisch für L1 :
{L2 , L1 } = {L21 , L1 } + {L22 , L1 } + {L23 , L1 }
= 2L1 {L1 , L1 } + 2L2 {L2 , L1 } + 2L3 {L3 , L1 }
= 2L2 L3 − 2L3 L2 = 0.
Aus dem Resultat (3.148) und dem Poissonschen Theorem läßt sich eine interessante
Folgerung ziehen. Man erkennt nämlich, daß, wenn zwei Drehimpulskomponenten
Erhaltungsgrößen sind, automatisch auch die dritte Komponente erhalten sein muß.
Somit ist dann L2 ebenfalls eine Erhaltungsgröße.
3.3.6 Poisson-Klammern und Quantisierung
Ein interessanter Aspekt an den Poisson-Klammern ist, daß sie eine direkte Analogie
in der Quantenmechanik haben. Dort werden physikalische Größen (“Observable”)
durch hermitesche Operatoren in einem speziellen Vektorraum (Hilbertraum) dargestellt, und der Poisson-Klammer der klassischen Mechanik entspricht der Kommutator
[û, v̂] = ûv̂ − v̂û
(3.150)
der Operatoren û, v̂ zweier solcher Größen. Der Übergang von der klassischen Mechanik zur Quantenmechanik kann durch die Quantisierungsvorschrift
{u, v}
→
i
[û, v̂]
h̄
(3.151)
vollzogen werden, wobei h̄ = 1.054 · 10−34 J s das Plancksche Wirkungsquantum
(geteilt durch 2π) ist. Beispielsweise folgt daraus und mit (3.129) für die quantenmechanischen Koordinaten- und Impulsoperatoren
[q̂k , q̂l ] = 0,
[p̂k , p̂l ] = 0,
[p̂k , q̂l ] =
h̄
δkl .
i
(3.152)
121
3 Analytische Mechanik
Ferner ergibt sich aus der klassischen Evolutionsgleichung (3.134) die Operator-Bewegungsgleichung (falls ĝ nicht explizit zeitabhängig)
i
dĝ
= [Ĥ, ĝ],
dt
h̄
(3.153)
welche als Heisenbergsche Bewegungsgleichung bekannt ist. Ĥ ist dabei der der klassischen Hamilton-Funktion entsprechende Hamilton-Operator. Es folgt unmittelbar,
daß ĝ erhalten ist, wenn dessen Kommutator mit dem Hamilton-Operator verschwindet, ganz entsprechend dem Erhaltungssatz (3.135).
Eine wichtige Bedeutung der quantenmechanischen Kommutatorrelationen liegt in
dem Konzept der Verträglichkeit (Kompatibilität). Es besagt, daß zwei Größen nur
dann gleichzeitig scharf meßbar sind, wenn die zugehörigen Operatoren kommutieren
(d. h., ihr Kommutator verschwindet). So folgt aus (3.152), daß es nicht möglich ist,
gleichzeitig Ort und Impuls eines Teilchens genau zu bestimmen, was die Aussage
der Heisenbergschen Unschärferelation ist. Die quantenmechanischen Pendants der
Drehimpuls-Relationen (3.148), (3.149) besagen, daß nur das Betragsquadrat L2 des
Drehimpulses und eine Komponente, z. B. Lz , gleichzeitig scharf gemessen werden
können.
3.3.7 Satz von Liouville
Wir definieren zunächst die folgenden Räume:
(q1 , q2 , . . . , qf ) ∈ IRf :
Konfigurationsraum,
(p1 , p2 , . . . , pf ) ∈ IRf :
Impulsraum,
(q1 , q2 , . . . , qf , p1 , p2 , . . . , pf ) ∈ IR2f :
Phasenraum.
Letzterer ist uns früher bereits in leicht abgewandelter Form, nämlich als Raum der
Ortsvektoren und Geschwindigkeiten, begegnet.
Ein Phasenpunkt x ist ein Element des Phasenraums,
x = (q1 , q2 , . . . , qf , p1 , p2 , . . . , pf ),
(3.154)
und entsprechend ist die Phasengeschwindigkeit v definiert als
v = (q̇1 , q̇2 , . . . , q̇f , ṗ1 , ṗ2 , . . . , ṗf ).
(3.155)
Man verwechsle diese beiden Größen nicht mit dem normalen Ortsvektor bzw. der
Geschwindigkeit eines Massenpunktes, welche Elemente des IR3 sind, und für welche
außerhalb dieses Unterabschnitts ebenfalls die Symbole x und v verwendet werden.
Die Bewegung eines Systems von Massenpunkten entspricht somit einer mit der Zeit
t parameterisierten Raumkurve x(t) im Phasenraum (“Trajektorie”). Diese kann
122
3.3 Hamiltonsche Mechanik
z. B. durch Lösen der Hamiltonschen Gleichungen (3.82) berechnet werden, welche
sich mit obigen Definitionen als
v = F (x, t),
Ã
wobei F =
∂H ∂H
∂H
∂H
∂H
∂H
,
, ...
,−
,−
, ... −
∂p1 ∂p2
∂pf
∂q1
∂q2
∂qf
!
(3.156)
,
schreiben lassen.
Wir berechnen nun mit (3.156) die Divergenz der Phasengeschwindigkeit:
2f
X
∂vi
div v =
i=1
∂xi
2f
X
∂Fi
i=1
∂xi
∂ 2H
∂2H
∂2H
∂ 2H
+ ... +
−
− ... −
∂q1 ∂p1
∂qf ∂pf
∂p1 ∂q1
∂pf ∂qf
=
⇒
=
div v = 0.
(3.157)
Abbildung 3.4: Gesamtheit von Bewegungen eines konservativen holonomen Systems
im Phasenraum. (a) Zustände zu den Zeiten t1 und t2 , (b) infinitesimale Zustandsänderung zwischen t und t + dt.
Dieses Ergebnis ist als Satz von Liouville bekannt; es läßt sich wie folgt interpretieren:
Gemäß Abb. 3.4 betrachten wir eine Gesamtheit von Bewegungen eines konservativen
holonomen Systems, die zur Zeit t1 das Phasenraumvolumen Γ1 und zur Zeit t2
das Phasenraumvolumen Γ2 einnehmen. Dann gilt mit (3.157) und dem Gaußschen
Integralsatz für die Änderung dieses Volumens im infinitesimalen Zeitintervall dt
I
I
dΓ =
ln dA =
∂Γ(t)
Z
(v dt) · n dA =
∂Γ(t)
div v dV dt
Γ(t)
Z
⇒ Γ̇ =
div v dV = 0,
(3.158)
Γ(t)
woraus folgt:
Γ1 = Γ2
⇐⇒
Γ(t) = Γ0 = const.
(3.159)
In Worten heißt das:
123
3 Analytische Mechanik
Das Phasenraumvolumen einer Gesamtheit von Bewegungen bleibt bei
konservativen holonomen Systemen erhalten.
Die Menge aller Bewegungen, die zu einer Zeit t das Phasenraumvolumen Γ einnehmen, kann also als Strömung einer inkompressiblen Flüssigkeit im 2f -dimensionalen
Phasenraum aufgefaßt werden.
Als Beispiel betrachten wir das mathematische Pendel für große Auslenkungen (§1.4.6).
Abbildung 3.5 zeigt die Strömung einer anfänglich kreisförmigen Bewegungsgesamtheit im zweidimensionalen Phasenraum (ϕ, pϕ ), wobei ein Punkt gerade auf der
Kriechkurve liegt, die asymptotisch in den oberen Umkehrpunkt ϕ = π hineinläuft.
Alle anderen Anfangszustände liegen im Bereich der Libration (Schwingung). Man
erkennt, daß der mit einem Pfeil markierte Punkt fast die harmonische Schwingung
für kleine Auslenkungen ausführt, wohingegen der zur Kriechkurve gehörige Punkt
nicht in den Bereich negativer pϕ vordringen kann. Trotz dieser starken Deformation
des Kreises bleibt aber das eingeschlossene Volumen erhalten.
Abbildung 3.5: Phasendiagramm für eine Bewegungsgesamtheit beim mathematischen Pendel. Die eingezeichneten Lagen gehören zu den Zeiten t = 0,
0.2 T , 0.4 T und 0.75 T (T ist die Schwingungsdauer für kleine Auslenkungen). Ein Randpunkt liegt gerade auf der Kriechbahn, welche
asymptotisch den oberen Umkehrpunkt erreicht.
Für nichtkonservative Systeme ist die Aussage des Liouvilleschen Satzes im allgemeinen nicht mehr richtig. Berücksichtigt man bei dem Problem “Massenpunkt in
parabolischer Schale” von §3.3.3 den Einfluß der Reibungskraft zwischen Massenpunkt und Schale, so ist anschaulich klar, daß der Massenpunkt unabhängig vom
jeweiligen Anfangszustand
(r, ϕ, pr , pϕ )|t=0 = (r0 , ϕ0 , (pr )0 , (pϕ )0 )
124
(3.160)
3.4 Variationsprinzipien
nach einer hinreichend großen Zeitspanne praktisch im tiefsten Punkt der Schale zur
Ruhe kommt, was dem Phasenpunkt
(r, ϕ, pr , pϕ )|t→∞ = (0, 0, 0, 0)
(3.161)
entspricht. Das bedeutet, daß das Volumen Γ0 > 0 einer anfänglichen Gesamtheit
von Bewegungen im Limes t → ∞ auf einen Punkt zusammenschrumpft:
Γ(t → ∞) = 0.
(3.162)
Abbildung 3.6 illustriert diesen Sachverhalt.
Abbildung 3.6: Phasendiagramm für eine Bewegungsgesamtheit des Massenpunkts
in parabolischer Schale mit Reibung.
3.4 Variationsprinzipien
Sowohl das zweite Newtonsche Gesetz (Impulssatz) als auch die Lagrangeschen Gleichungen als auch die Hamiltonschen Gleichungen liefern für ein bestimmtes mechanisches System einen Satz von Differentialgleichungen, aus welchem die Bewegung
bei vorgegebenen Anfangsbedingungen berechnet werden kann. Dazu sei nun eine
grundsätzliche Alternative aufgezeigt, nämlich die Beschreibung mechanischer Systeme vermittels Variationsprinzipien.
3.4.1 Einführung in die Variationsrechnung
Zum Einstieg in diesen Formalismus erinnere man sich an die Bestimmung von
Extremwerten einer Funktion f (x). Notwendig für ein Maximum oder Minimum
an einem speziellen Punkt x ist das Verschwinden der ersten Ableitung, f 0 (x) = 0.
Jedoch kann umgekehrt f 0 (x) = 0 auch einen Sattelpunkt bedeuten. Bezeichnet man
einen Punkt x als stationär, falls er entweder Maximum, Minimum oder Sattelpunkt
der Funktion f (x) ist, so gilt die Äquivalenz
f (x) stationär
⇔
f 0 (x) = 0.
(3.163)
125
3 Analytische Mechanik
Stationäre Punkte zeichnen sich dadurch aus, daß die Funktion in deren unmittelbarer Umgebung praktisch konstant ist.
Im Gegensatz zu einer Funktion hängt ein Funktional nicht einfach von einer oder
mehreren Zahlen, sondern von einer kompletten Funktion ab. Es sei nun für eine
gegebene Funktion f (x, y, z) das Funktional
Zx2
f (x, y(x), y 0 (x)) dx,
I{y(x)} =
(3.164)
x1
welches von der Funktion y(x) abhängt, betrachtet.
In Verallgemeinerung des oben Gesagten bezeichnet man I{y(x)} für eine spezielle
Funktion y(x) dann als stationär, wenn sich I{y(x)} bei infinitesimalen Variationen
von y(x) nicht ändert. Dabei setzen wir voraus, daß die Endpunkte x1 , x2 festgehalten sind, und weiterhin die Funktion y(x) an den Endpunkten nicht variiert
wird, d. h., y1 = y(x1 ) und y2 = y(x2 ) sind ebenfalls fest. (Wir werden später auch
allgemeinere Fälle betrachten.) Dann lassen sich derartige Variationen darstellen als
y(x, ε) = y(x) + εη(x),
(3.165)
wobei die Testfunktion η(x) eine beliebige Funktion mit η(x1 ) = η(x2 ) = 0 und ε
eine kleine Zahl ist (siehe Abb. 3.7). Dann gilt
Zx2
f (x, y(x, ε), y 0 (x, ε)) dx,
I{y(x, ε)} =
(3.166)
x1
und die Stationaritätsbedingung ist entsprechend zu Gl. (3.163)
¯
∂I{y(x, ε)} ¯¯
¯
= 0.
¯
∂ε
ε=0
(3.167)
Abbildung 3.7: Variation der Funktion y(x) mit der Testfunktion η(x).
Definiert man den Variationsoperator δ als
¯
∂ ¯¯
δ = dε
¯
,
∂ε ¯ε=0
126
(3.168)
3.4 Variationsprinzipien
dann ist
¯
∂I{y(x, ε)} ¯¯
δI{y(x)} =
¯
dε
¯
∂ε
ε=0
(3.169)
die Variation von I, und analog
¯
∂y ¯¯
δy(x) =
¯
dε = η(x) dε
∂ε ¯ε=0
(3.170)
die Variation von y, welche in der Tat an den Endpunkten verschwindet:
δy(x1 ) = δy(x2 ) = 0.
(3.171)
Damit lautet die Bedingung für Stationarität
I{y(x)} stationär
⇔
δI{y(x)} = 0.
(3.172)
Wir rechnen nun die Variation δI aus. Die Differentiation nach ε und die Integration
über x können vertauscht werden, so daß gilt
Zx2
∂I{y(x, ε)}
∂
=
f (x, y(x, ε), y 0 (x, ε)) dx
∂ε
∂ε
x
1
Zx2 Ã
=
x1
Zx2
=
x1
Zx2
=
x1
∂f ∂y 0
∂f ∂y
+ 0
∂y ∂ε ∂y ∂ε
!
dx
x2
Z
∂f ∂y
∂f ∂ 2 y
dx +
dx
0 ∂ε∂x
∂y ∂ε
∂y
x
1
"
∂f ∂y
∂f ∂y
dx +
∂y ∂ε
∂y 0 ∂ε
#x2
Zx2
−
x1
x1
d
dx
Ã
∂f
∂y 0
!
∂y
dx.
∂ε
(3.173)
Wegen Gl. (3.165) und η(x1 ) = η(x2 ) = 0 [festgehaltene Endpunkte (x1 , y1 ) und
(x2 , y2 )] ist
"
∂y
= η(x)
∂ε
⇒
∂f ∂y
∂y 0 ∂ε
#x2
x1
"
#x2
∂f
=
η(x)
∂y 0
= 0,
(3.174)
x1
so daß aus den Definitionen (3.169), (3.170) der Variationen δI, δy folgt:
Zx2 (
δI{y(x)} =
x1
d
∂f
−
∂y dx
Ã
∂f
∂y 0
!)
δy(x) dx.
(3.175)
Da die Variation δy(x) beliebig gewählt werden kann, ist die Stationaritätsbedingung
(3.172) äquivalent zum Verschwinden des Terms in geschweiften Klammern:
∂f
d
−
∂y dx
Ã
∂f
∂y 0
!
= 0.
(3.176)
Das Funktional I{y(x)} ist also genau dann für y(x) stationär, wenn die gegebene
Funktion f für y(x) die Differentialgleichung (3.176) erfüllt, welche als Eulersche
Differentialgleichung der Variationsrechnung bezeichnet wird.
127
3 Analytische Mechanik
Brachistochronenproblem
Als Anwendung der oben entwickelten Variationsrechnung betrachten wir das Problem, in einer Ebene diejenige Kurve zwischen zwei gegebenen Punkten P1 , P2 zu
bestimmen, auf welcher ein Massenpunkt im homogenen Schwerefeld die kürzeste
Zeit für die geführte Bewegung von P1 nach P2 benötigt (“Brachistochronenproblem”, Abb. 3.8). Dabei sei der Massenpunkt anfänglich bei P1 in Ruhe.
Abbildung 3.8: Zum Brachistochronenproblem.
Aus der Energieerhaltung folgt
m 2
m
v − mgy = v12 − mgy1 = 0
2
2
T +V =
q
⇒
v=
2gy.
(3.177)
Die Zeit zum Durchlaufen eines Bogenlänge-Inkrements ds auf der Kurve ist ds/v,
so daß die gesamte Bewegungsdauer
Z2
t12 =
1
2
ds Z
=
v
√
1
x2 s
dx2 + dy 2 Z
√
=
2gy
x
1
1 + (y 0 )2
dx
2gy
(3.178)
beträgt. Es liegt also hier ein Funktional vom Typ (3.164) vor, wobei
s
0
0
f (x, y, y ) = f (y, y ) =
1 + (y 0 )2
.
2gy
(3.179)
Notwendige Bedingung dafür, daß die Laufzeit t12 für eine bestimmte Kurve y(x)
minimal ist, ist die Stationarität von t12 für ebendieses y(x). Demnach muß die
Variation von t12 verschwinden,
Zx2
f (y, y 0 ) dx = 0,
δt12 = δ
(3.180)
x1
also für die Funktion f (y, y 0 ) die Eulersche Differentialgleichung (3.176) gelöst werden:
d
∂f (y, y 0 )
−
∂y
dx
128
Ã
∂f (y, y 0 )
∂y 0
!
= 0.
(3.181)
3.4 Variationsprinzipien
Durch Multiplikation mit −y 0 findet man ein erstes Integral:
Ã
y
0
d ∂f (y, y 0 ) ∂f (y, y 0 )
−
dx ∂y 0
∂y
!
(
⇒
=0
)
(
0
0
0
∂f (y, y 0 )
0 d ∂f (y, y )
0 ∂f (y, y )
00 ∂f (y, y )
y 00
+
y
−
y
+
y
∂y 0
dx ∂y 0
∂y
∂y 0
Ã
)
=0
!
⇒
d
∂f (y, y 0 )
df (y, y 0 )
y0
−
=0
dx
∂y 0
dx
⇒
d
∂f (y, y 0 )
− f (y, y 0 ) = 0
y0
0
dx
∂y
⇒
y0
!
Ã
∂f (y, y 0 )
− f (y, y 0 ) = C = const.
∂y 0
(3.182)
Diese Umformung ist immer dann möglich, wenn die Funktion f nicht explizit von
x abhängt. Das Ergebnis wird als Energieintegral bezeichnet.
Mit f (y, y 0 ) aus Gl. (3.179) folgt
√
y0
1 + y 02
0
yq
− √
=C
2gy
2gy (1 + y 02 )
⇒
√
q
q
y 02
√
02 = C 2gy = −K y
1
+
y
−
1 + y 02
⇒
√
1
√
y
=
K
1 + y 02
⇒
K 2 y(1 + y 02 ) = 1
s
⇒
y0 =
1
−1=
K 2y
s
⇒
dx =
³
s
⇒ K>0
µ
q
¶
K = −C 2g
´
1 − K 2y
K 2y
K 2y
dy.
1 − K 2y
Wir substituieren nun
1
1
α
y = 2 sin2 =
(1 − cos α),
K
2
2K 2
Das ergibt
(3.183)
dy =
1
α
α
sin
cos
dα.
K2
2
2
(3.184)
v
u
α
1 u sin2 α
α
1
α
1
dx = 2 t 2 2α sin cos dα = 2 sin2 dα =
(1 − cos α) dα, (3.185)
K
cos 2
2
2
K
2
2K 2
und kann in den Grenzen von 0 bis α integriert werden:
x=
1
(α − sin α).
2K 2
(3.186)
129
3 Analytische Mechanik
Setzt man noch
r=
1
,
2K 2
(3.187)
so sind Gln. (3.184) und (3.186) die Parameterdarstellung der gesuchten Brachistochrone:
x = r (α − sin α),
(3.188)
y = r (1 − cos α).
Dabei ist α der Kurvenparameter, und die Integrationskonstante r ist so zu wählen,
daß die Kurve durch den Punkt P2 geht [durch P1 = (0, 0) geht sie automatisch].
Bei der Kurve (3.188) handelt es sich um eine Zykloide (Rollkurve). Sie entsteht
durch Verfolgung der Bahn eines Punktes auf dem Umfang eines auf der x-Achse
abrollenden Rades (siehe Abb. 3.9).
Abbildung 3.9: Die Zykloide als Lösung des Brachistochronenproblems.
3.4.2 Hamiltonsches Prinzip
Wir untersuchen jetzt die Frage der Stationarität für das Funktional
Zx2
f (x, y1 (x), . . . , yn (x), y10 (x), . . . , yn0 (x)) dx, (3.189)
I{y1 (x), . . . , yn (x)} =
x1
welches nun von n Funktionen y1 , . . . , yn abhängt. Wiederum sollen die Endpunkte
x1 , x2 sowie die Funktionswerte an den Endpunkten y1 (x1 ) . . . yn (x1 ) und y1 (x2 ) . . . yn (x2 )
festgehalten sein.
Sei I{y1 (x), . . . , yn (x)} für den speziellen Funktionensatz y1 (x) . . . yn (x) stationär.
Analog zu (3.165) kann eine Variation dieser Funktionen mit Hilfe eines Satzes von
130
3.4 Variationsprinzipien
Testfunktionen η1 (x) . . . ηn (x) als
y1 (x, ε) = y1 (x) + εη1 (x),
..
..
.
.
yn (x, ε) = yn (x) + εηn (x)
(3.190)
parameterisiert werden, wobei wegen der nicht zu variierenden Werte an den Endpunkten ηi (x1 ) = ηi (x2 ) = 0 ist. Die Bedingung für Stationarität lautet dann entsprechend zu (3.172)
I{y1 (x), . . . , yn (x)} stationär
⇔
δI{y1 (x), . . . , yn (x)} = 0;
(3.191)
die Variation von I ist hierbei gemäß der Definition (3.168) des Variationsoperators
¯
∂I{y1 (x, ε), . . . , yn (x, ε)} ¯¯
¯
dε.
δI{y1 (x), . . . , yn (x)} =
¯
∂ε
ε=0
(3.192)
Analog zur Herleitung von (3.175) erhält man dafür
δI{y1 (x), . . . , yn (x)} =
(
Zx2 X
n
x1
i=1
∂f
d
−
∂yi dx
Ã
∂f
∂yi0
!)
δyi (x) dx,
(3.193)
wobei die Variationen der Funktionen yi
¯
∂yi ¯¯
δyi (x) =
¯
dε = ηi (x) dε,
∂ε ¯ε=0
³
i = 1...n
⇒ δyi (x1 ) = δyi (x2 ) = 0 wie gefordert
(3.194)
´
sind. Da die Variationen δyi unabhängig voneinander sind, ist die Stationaritätsbedingung δI = 0 dann und nur dann erfüllt, wenn in (3.193) die geschweiften
Klammern einzeln verschwinden:
∂f
d
−
∂yi dx
Ã
∂f
∂yi0
!
= 0,
i = 1 . . . n.
(3.195)
Diese Gleichungen heißen Euler-Lagrangesche Differentialgleichungen; sie stellen eine
Verallgemeinerung der Eulerschen Differentialgleichung (3.176) dar. Ihre Lösungen
sind diejenigen Kurven, für die das Funktional I{y1 (x), . . . , yn (x)} stationär ist,
bzw. für die die zugehörige Variation δI verschwindet.
Für ein konservatives holonomes System mit Lagrange-Funktion L(qj , q̇j , t) ist das
Wirkungsintegral S einer Bewegung auf der Raumkurve q1 (t), . . . , qf (t) im Konfigurationsraum zwischen den Zeiten t1 und t2 definiert als
Zt2
S=
L(qj (t), q̇j (t), t) dt.
(3.196)
t1
131
3 Analytische Mechanik
Faßt man das als Funktional der qj auf, so ist nach den Euler-Lagrangeschen Differentialgleichungen S genau dann stationär, bzw. die Variation von S gleich Null,
wenn
∂L
d
−
∂qj
dt
Ã
∂L
∂ q̇j
!
= 0,
j = 1 . . . f.
(3.197)
Das sind aber bis auf einen Faktor −1 genau die Lagrangeschen Gleichungen (3.28),
von denen wir bereits wissen, daß sie für die tatsächlich durchlaufene Bahn des
Systems gültig sind. Daraus folgt das Hamiltonsche Prinzip:
Hamiltonsches Prinzip
Die Bewegung eines Systems (konservativ, holonom) zwischen den Zeitpunkten t1 und t2 ist derart, daß das Wirkungsintegral
Zt2
L(qj (t), q̇j (t), t) dt
S=
t1
stationär für die durchlaufene Bahn ist, bzw. die Variation des Wirkungsintegrals verschwindet:
Zt2
δS = δ
L(qj (t), q̇j (t), t) dt = 0.
t1
Gemäß der Definition der δ-Variation sind dabei die Endpunkte t1 , t2 festzuhalten,
und weiterhin werden die qj an den Endpunkten nicht variiert, d. h., es ist
δqj (t1 ) = δqj (t2 ) = 0,
j = 1 . . . f.
(3.198)
Zur tatsächlichen Berechnung von Bewegungen bringt das Hamiltonsche Prinzip
nichts Neues, weil dessen Auswertung wieder auf die Lagrangeschen Gleichungen
führt. Es hat aber in theoretischer Hinsicht den Vorteil, daß es nur Größen enthält,
die unabhängig von den jeweiligen generalisierten Koordinaten definiert sind (nämlich
die kinetische und potentielle Energie), und daher automatisch invariant hinsichtlich der speziellen Wahl dieser Koordinaten ist. Weiterhin weist die Formulierung der
Mechanik konservativer holonomer Systeme mit dem Hamiltonschen Prinzip strukturelle Analogien der Mechanik zu anderen Gebieten auf (z. B. Elektrodynamik,
Quantenmechanik), die nützliche physikalische Einsichten zur Folge haben.
Hamiltonsches Prinzip und Hamiltonsche Gleichungen
Wir zeigen nun, daß aus dem Hamiltonschen Prinzip auch die Hamiltonschen Gleichungen hergeleitet werden können. Dazu formen wir das Hamiltonsche Prinzip mit
der Definition (3.54) der Hamilton-Funktion um:
Zt2
δS = δ
t1
132
X
j
pj q̇j − H(qj , pj , t) dt = 0
(3.199)
3.4 Variationsprinzipien
(“modifiziertes Hamiltonsches Prinzip”). Wie zuvor [vgl. (3.168)] ist dabei der Variationsoperator δ zu verstehen als
¯
∂ ¯¯
δ = dε
¯
,
∂ε ¯ε=0
(3.200)
wobei ε jetzt Variationen der qj und pj parameterisiert. Somit folgt
Zt2 X Ã
dε
j
t1
∂pj
∂ q̇j
∂H ∂qj
∂H ∂pj
q̇j + pj
−
−
∂ε
∂ε
∂qj ∂ε
∂pj ∂ε
!
dt = 0
(3.201)
(Zusatz “ε = 0” der Übersichtlichkeit halber weggelassen). Die Integration über den
zweiten Term in der Klammer kann mit partieller Integration umgeformt werden:
Zt2
t1
Zt2
∂ q̇j
d ∂qj
pj
dt =
pj
dt
∂ε
dt ∂ε
t1
"
=
∂qj
pj
∂ε
#t2
Zt2
−
t1
t1
t2
Z
∂qj
∂qj
dt = − ṗj
dt;
ṗj
∂ε
∂ε
(3.202)
t1
letzteres, weil alle variierten Wege nach Voraussetzung die gleichen Endpunkte haben, so daß ∂qj /∂ε für t1 und t2 verschwindet. Damit folgt aus (3.201) weiter
Zt2 X (
j
t1
Zt2 X (
⇒
∂pj
dε
∂ε
Ã
δpj
j
t1
Ã
∂H
q̇j −
∂pj
∂H
q̇j −
∂pj
!
∂qj
− dε
∂ε
!
Ã
− δqj
Ã
∂H
ṗj +
∂qj
∂H
ṗj +
∂qj
!)
dt = 0
!)
dt = 0.
(3.203)
Da die Koordinaten und Impulse unabhängig voneinander variiert werden können,
kann das nur erfüllt werden, wenn alle Terme in runden Klammern separat verschwinden. Daraus resultieren die Beziehungen
∂H
,
∂pj
q̇j =
ṗj
∂H
= −
,
∂qj
(j = 1 . . . f ),
(3.204)
die in der Tat die Hamiltonschen Gleichungen (3.82) darstellen.
3.4.3 Prinzip der kleinsten Wirkung
Die Wirkung A der Bewegung eines mechanischen Systems (konservativ, holonom)
zwischen den Zeiten t1 und t2 ist definiert als
A=
Zt2 X
t1
pj q̇j dt.
(3.205)
j
133
3 Analytische Mechanik
Das für diese Größe gültige Variationsprinzip bedarf zunächst der Definition eines
neuen Variationstyps (∆-Variation), bei dem im Gegensatz zur δ-Variation auch die
unabhängige Variable t variiert wird.
Dazu wird ein Satz von f + 1 Testfunktionen σ(t), ηj (t) herangezogen, und die
Variationen von t und qj gemäß
t(ε) =
t
+ εσ(t),
qj (t(ε), ε) = qj (t(ε)) + εηj (t(ε)),
j = 1...f
(3.206)
mit ε parameterisiert [vgl. Gl. (3.190)]. Der Variationsoperator ∆ ist definiert als
¯
d ¯¯
¯
,
∆ = dε
dε ¯ε=0
(3.207)
wobei die totale Ableitung nach ε auch das implizit in t enthaltene ε einschließt.
Dann gilt
¯
dt(ε) ¯¯
∆t =
¯
dε = σ(t) dε
dε ¯ε=0
(3.208)
und
¯
∆qj =
dqj (t(ε), ε) ¯¯
¯
dε
¯
dε
ε=0
Ã
=
⇒
∂qj (t, ε) dt(ε) ∂qj (t, ε)
+
∂t
dε
∂ε
!
dε
ε=0
∆qj = δqj + q̇j (t) ∆t.
(3.209)
Es seien nur solche Testfunktionen zugelassen, die die qj an den Endpunkten nicht
variieren, d. h.,
∆qj (t1 ) = ∆qj (t2 ) = 0.
(3.210)
Beziehung (3.209) gilt entsprechend auch für ein beliebiges Funktional F {qj (t), q̇j (t), t}:
∆F =
=
+
⇒
134
¯
!
Ã
¯
X
dF ¯
∂F dq̇j
∂F dt
∂F dqj
+
+
¯
dε
=
dε
dε ¯ε=0
∂qj dε
∂ q̇j dε
∂t dε
j
ε=0
!
Ã
X ∂F ∂q
∂F ∂ q̇j
j
+
dε
∂qj ∂ε
∂ q̇j ∂ε
j
ε=0
Ã
!
X ∂F ∂q
∂F
∂
q̇
∂F
dt
j
j
+
+
∂qj ∂t
∂ q̇j ∂t
∂t dε
j
∆F = δF + Ḟ ∆t.
dε
ε=0
(3.211)
3.4 Variationsprinzipien
Man bezeichnet daher die ∆-Variation auch als schräge Variation.
Wir berechnen nun die ∆-Variation der Wirkung A, wobei wir uns auf Systeme
beschränken, für die die Hamiltonfunktion erhalten ist (d. h., H ist nicht explizit zeitabhängig). Des weiteren betrachten wir nur solche Variationen der Trajektorie, die
H nicht verändern; somit ist auch auf den variierten Bahnen H erhalten. Aufgrund
der Definition (3.54) der Hamilton-Funktion und dieser Einschränkung ist
∆A = ∆
Zt2 X
t1
Zt2
(L + H) dt
pj q̇j dt = ∆
j
t1
Zt2
³
L dt + ∆ H · (t2 − t1 )
= ∆
´
t1
Zt2
= ∆
h
it2
L dt + H ∆t
t1
t1
.
(3.212)
Sei
Zt
L dt0
I(t) =
⇔
I˙ = L,
(3.213)
t0
dann ist mit Beziehung (3.211)
Zt2
∆
L dt = ∆I(t2 ) − ∆I(t1 )
t1
˙ 2 ) ∆t2 − I(t
˙ 1 ) ∆t1
= δI(t2 ) − δI(t1 ) + I(t
Zt2
= δ
it2
L dt + [L ∆t
t1
t1
.
(3.214)
Es folgt als Zwischenergebnis
Zt2
∆A = δ
L dt + [L ∆t
t1
it2
t1
h
+ H ∆t
it2
t1
.
(3.215)
Da hierbei nach Voraussetzung die ∆-Variation, im allgemeinen nicht aber die δVariation der qj für t1 und t2 verschwindet, ist der erste Term auf der rechten Seite
nicht aufgrund des Hamiltonschen Prinzips gleich Null. Unter Verwendung der Lagrangeschen Gleichungen sowie der Gln. (3.209), (3.210) ergibt er sich statt dessen
zu
Zt2
δ
L dt
t1
∂ Zt2
L dt
=
∂ε
t1
dε
ε=0
t
!
Ã
Z 2 X ∂L ∂q
∂L ∂ q̇j
j
+
dt
=
∂qj ∂ε
∂ q̇j ∂ε
j
t1
dε
ε=0
135
3 Analytische Mechanik
=
t
Ã
Z 2 X
j
t1
Zt2
=
X d
=
Zt2 X
j
t1
Ã
dt
j
t1
∂L d ∂qj
d ∂L ∂qj
·
+
·
dt ∂ q̇j ∂ε
∂ q̇j dt ∂ε
d
dt
Ã
∂L
δqj
∂ q̇j
!
!
dt
dε
ε=0
dt
!
∂L
∂L
∆qj −
q̇j ∆t dt
∂ q̇j
∂ q̇j
!t2
Ã
X ∂L
∂L
∆qj −
q̇j ∆t
=
∂ q̇j
j
∂ q̇j
t1
t2
X
= − pj q̇j ∆t .
j
(3.216)
t1
Durch Einsetzen von (3.216) in (3.215) erhält man unter Berücksichtigung der Definition (3.54) der Hamiltonfunktion
t2
µ X
¶
∆A = −
pj q̇j + L + H ∆t
j
⇒
∆A = 0.
(3.217)
t1
Unter den gegebenen Voraussetzungen (konservatives holonomes System, H erhalten, Variationen der Trajektorie nur in Übereinstimmung mit der Erhaltung von
H) ist also die ∆-Variation der Wirkung A gleich Null, bzw. die Wirkung A selbst
stationär (minimal, maximal oder ein Sattelpunkt). Das ist die Aussage des Prinzips
der kleinsten Wirkung.
Unter der zusätzlichen Voraussetzung, daß die definierenden Transformationen (3.5)
die Zeit nicht explizit enthalten, ist [vgl. (3.61)]
X
pj q̇j =
j
X ∂L
j
∂ q̇j
Zt2
q̇j = 2T
⇒
A=
2T dt.
(3.218)
t1
In diesem Fall geht das Prinzip der kleinsten Wirkung über in die Aussage
Zt2
∆
T dt = 0.
(3.219)
t1
Wirken weiterhin keine äußeren Kräfte (V = 0), dann ist H = T , und somit auch
die kinetische Energie T erhalten. In diesem Fall folgt
Zt2
T ·∆
dt = 0
⇒
∆(t2 − t1 ) = 0.
(3.220)
t1
Die Aussage dieses Variationsprinzips ist, daß im kräftefreien Fall von allen möglichen Trajektorien zwischen zwei gegebenen Punkten, die mit der Energieerhaltung
136
3.4 Variationsprinzipien
in Einklang sind, diejenige Trajektorie durchlaufen wird, für die die Laufzeit t2 − t1
stationär (in der Regel minimal) ist.
Hier zeigt sich eine Analogie zur geometrischen Optik. Die Aussage des dort gültigen Fermatschen Prinzips ist nämlich, daß ein Lichtstrahl zwischen zwei gegebenen
Punkten denjenigen Weg nimmt, für welchen die Laufzeit am kürzesten ist.
Als Beispiel für Version (3.220) des Prinzips der kleinsten Wirkung diskutieren wir
die kräftefreie Bewegung eines Massenpunktes auf einer Kugeloberfläche. Gemäß
Abb. 3.10 seien zwei Punkte A und B auf dieser gegeben, und die Fragestellung ist,
welche Bahn ein Massenpunkt beschreibt, der sich von A nach B bewegt. Nach Gl.
(3.220) wird diejenige Bahn angenommen, die bei gegebener kinetischer Energie eine minimale oder maximale Laufzeit hat (evtl. auch einen Sattelpunkt). Da mit der
kinetischen Energie auch der Betrag der Geschwindigkeit erhalten ist, entspricht das
der Forderung nach minimaler oder maximaler Weglänge. Kurven minimaler oder
maximaler Weglänge auf gekrümmten Flächen sind ganz allgemein die geodätischen
Linien, im Falle der Kugeloberfläche die Großkreise. Der Großkreis durch A und B
wird gebildet durch den Schnitt der von A, B und dem Kugelmittelpunkt M aufgespannten Ebene mit der Kugeloberfläche. Nach Abb. 3.10 sind also zwei Bahnen von
A nach B möglich, nämlich die kurze Verbindung längs des Großkreises (minimale
Laufzeit, dick eingezeichnet), und die lange Verbindung “hinten herum” längs des
Großkreises (maximale Laufzeit).
Abbildung 3.10: Kräftefreie Bewegung eines Massenpunktes auf einer Kugeloberfläche von A nach B. Die dick durchgezogene Linie stellt die
tatsächlich durchlaufene Bahn dar (auf dem Großkreis durch A und
B), die Strich-Punkt-Linie eine variierte Bahn.
In dem entarteten Fall, daß sich A und B gegenüber liegen, bilden A, B und M eine
Gerade. Dann gibt es keinen eindeutigen Großkreis zwischen A und B, sondern jede
Ebene, die diese Gerade enthält, definiert durch Schnitt mit der Kugeloberfläche
einen solchen (jeder Meridian vom Nordpol zum Südpol ist ein Großkreis auf der
Erde). Die kräftefreie Bewegung des Massenpunktes ist auf jedem dieser Großkreise
möglich, so daß in diesem Fall die Laufzeit von A nach B weder maximal noch
137
3 Analytische Mechanik
minimal ist, sondern einen Sattelpunkt darstellt.
Die kräftefreie Bewegung eines Massenpunktes auf einer allgemeinen gekrümmten
Fläche verläuft also stets längs der geodätischen Linien. Eine weitere Eigenschaft
von geodätischen Linien ist, daß sie eine minimale Krümmung besitzen. Es wird
also diejenige Bahn durchlaufen, für die die Krümmung minimal ist (“Hertzsches
Prinzip der kleinsten Krümmung”). Diese Aussage kann auf die allgemeine Relativitätstheorie übertragen werden, wo man es mit einem vierdimensionalen Raum (Ort
und Zeit) zu tun hat, der durch die Anwesenheit von Masse eine Krümmung erleidet. Die Trajektorien von Massenpunkten in diesem vierdimensionalen gekrümmten
Raum sind ebenfalls geodätische Linien, also Linien minimaler Krümmung. Die Projektionen dieser Geodäten auf den gewöhnlichen dreidimensionalen Raum ergeben
bei Abwesenheit von Masse Geraden, ansonsten jedoch gekrümmte Bahnen. Das ist
die Beschreibung der Gravitation im Rahmen der allgemeinen Relativitätstheorie.
3.4.4 Kanonische Transformationen
Definition, erzeugende Funktion
In Abschnitt 3.2.5 wurden im Rahmen der Lagrangeschen Formulierung der Mechanik konservativer holonomer Systeme differenzierbare Abbildungen von einem Satz
generalisierter Koordinaten qj auf einen anderen Satz q̃k betrachtet, die als Punkttransformationen bezeichnet wurden. Dabei zeigte sich, daß auch mit den transformierten Koordinaten eine Lagrange-Funktion L̃ gebildet werden kann, welche den
Lagrangeschen Gleichungen genügt.
Es stellt sich nun die Frage, ob etwas entsprechendes auch im Rahmen der Hamiltonschen Mechanik möglich ist. Allerdings haben wir es in diesem Fall nicht nur
mit den Koordinaten, sondern mit den Koordinaten und Impulsen als unabhängigen
Variablen des Problems zu tun. Invertierbare und differenzierbare Transformationen
von einem Satz qj , pj auf einen anderen Satz Qk , Pk (man verwechsle Qk nicht mit
den generalisierten Kräften, die auch so bezeichnet wurden!) haben die allgemeine
Form
qj = qj (Qk , Pk , t),
pj = pj (Qk , Pk , t),
(3.221)
Pk = Pk (qj , pj , t),
(3.222)
bzw. invers
Qk = Qk (qj , pj , t),
wobei die zugehörige Funktionalmatrix regulär sein soll.
Es ist jedoch nicht selbstverständlich, daß zu jedem neuen Satz von Koordinaten
Qk und Impulsen Pk , die aus einer solchen Transformation hervorgehen, auch eine
Hamiltonfunktion existiert und die kanonischen Gleichungen gelten. Daher treffen
wir die folgende Definition:
Eine Transformation des Typs (3.221), (3.222) heißt kanonische Transformation, falls eine Hamiltonfunktion H̃(Qk , Pk , t) der transformierten
138
3.4 Variationsprinzipien
Koordinaten und Impulse existiert, für die die kanonischen Gleichungen
gelten:
Q̇k =
∂ H̃
,
∂Pk
Ṗk = −
∂ H̃
,
∂Qk
k = 1 . . . f.
Anders formuliert bedeutet das, daß die kanonischen Gleichungen unter kanonischen
Transformationen invariant sind. Man spricht synonym auch von Kontakttransformationen.
Wie kann man derartige kanonische Transformationen konstruieren? Einen Zugang
dazu liefert das modifizierte Hamiltonsche Prinzip (3.199), welches ja zu den kanonischen Gleichungen äquivalent ist. Ersetzt man darin pj q̇j dt → pj dqj , so lautet
es
Z2
δ
X
pj dqj − H(qj , pj , t) dt = 0.
(3.223)
j
1
In dieser Formulierung des modifizierten Hamiltonschen Prinzips stellt der erste
Term ein Kurvenintegral im Konfigurationsraum (f -dimensionaler Raum der Koordinaten qj ) dar.
Wenn nun die kanonischen Gleichungen auch für die transformierten Koordinaten
und Impulse gelten sollen, muß Gl. (3.223) auch dafür erfüllt sein:
Z2
δ
X
Pj dQj − H̃(Qj , Pj , t) dt = 0.
(3.224)
j
1
Subtraktion dieser beiden Variationsprinzipien ergibt
Z2
δ
X
pj dqj −
j
1
X
Pj dQj − (H − H̃) dt = 0.
(3.225)
j
Das ist sicher dann erfüllt, wenn der Integrand in Klammern gleich dem totalen
Differential dF1 einer Funktion F1 (qj , Qj , t) ist,
X
pj dqj −
j
X
Pj dQj − (H − H̃) dt = dF1 (qj , Qj , t),
denn dann rechnet man leicht
Z2
δ
(3.226)
j
1
X
pj dqj −
j
X
Z2
Pj dQj − (H − H̃) dt = δ
j
³
´
dF1 = δ F1 (2) − F1 (1) = 0.
1
Dabei folgt der letzte Schritt aus der Tatsache, daß die Endpunkte zu den Zeiten t1
und t2 nach Konstruktion der δ-Variation nicht variiert werden.
Aus Gl. (3.226) folgen sofort die Relationen
pj =
∂F1
,
∂qj
Pj = −
∂F1
,
∂Qj
(3.227)
139
3 Analytische Mechanik
sowie
H − H̃ = −
∂F1
∂t
⇒
H̃ = H +
∂F1
.
∂t
(3.228)
Die 2f Gleichungen (3.227), welche die 4f Größen qj , pj , Qj und Pj enthalten,
definieren die kanonische Transformation (man kann sie ja nach den qj , pj oder
alternativ nach den Qj , Pj auflösen), und Gl. (3.228) gibt die zugehörige Relation
zwischen alter und neuer Hamiltonfunktion an.
Man kann eine kanonische Transformation also durch Vorgabe einer beliebigen differenzierbaren Funktion F1 (qj , Qj , t) generieren. Daher bezeichnet man F1 als erzeugende Funktion der kanonischen Transformation, die via Gl. (3.227) daraus hervorgeht.
Beispiel
Wir betrachten die erzeugende Funktion
F1 =
f
X
ql Ql .
(3.229)
l=1
Die zugehörige kanonische Transformation ist nach Gl. (3.227)
pj =
⇒
∂F1
= Qj ,
∂qj
Qj = p j ,
Pj = −
∂F1
= −qj
∂Qj
Pj = −qj .
(3.230)
Diese Transformation vertauscht also Koordinaten mit Impulsen! Dies zeigt eindrucksvoll die Unabhängigkeit von Koordinaten und Impulsen im Rahmen der Hamiltonschen Mechanik. Da F1 nicht explizit von der Zeit abhängt, ist nach Gl. (3.228)
H̃(Qj , Pj , t) = H(qj , pj , t).
(3.231)
Die kanonischen Gleichungen gelten für H und für H̃ gleichermaßen.
Weitere Typen von erzeugenden Funktionen
Die Abhängigkeit der erzeugenden Funktionen F1 (qj , Qj , t) von den alten und neuen
Koordinaten sowie der Zeit ergibt sich in natürlicher Weise aus den in Gl. (3.226)
auftretenden Differentialen. Es ist jedoch auch möglich, mit Hilfe von LegendreTransformationen erzeugende Funktionen mit anderen Unabhängigen zu konstruieren. Will man etwa die Abhängigkeit von den Qj durch eine Abhängigkeit von den
Pj = −∂F1 /∂Qj ersetzen, so ergibt die zugehörige Legendre-Transformation eine
erzeugende Funktion F2 (qj , Pj , t):
F2 (qj , Pj , t) = F1 (qj , Qj , t) +
X
j
140
Pj Qj .
(3.232)
3.4 Variationsprinzipien
Diese Abhängigkeit sieht man ein, indem man wie üblich das totale Differential der
so gebildeten Funktion F2 ausrechnet. Für dF1 gilt dabei wie gehabt die Beziehung
(3.226), welche sicherstellt, daß eine kanonische Transformation zwischen den qj , pj
und den Qj , Pj vorliegt:
dF2 = dF1 + d
=
X
µX
j
pj dqj −
j
=
X
¶
Pj Qj
X
Pj dQj − (H − H̃) dt +
j
pj dqj +
j
X
j
X
Pj dQj +
X
Qj dPj
j
Qj dPj − (H − H̃) dt.
(3.233)
j
Hieraus folgen analog zu (3.227), (3.228) die Relationen
pj =
∂F2
,
∂qj
Qj =
∂F2
,
∂Pj
(3.234)
und
H̃ = H +
∂F2
.
∂t
(3.235)
Die zu der erzeugenden Funktion F2 (qj , Pj , t) gehörende kanonische Transformation
ist mithin durch die 2f Gleichungen (3.234) definiert.
Will man in F1 statt dessen die qj durch die pj = ∂F1 /∂qj ersetzen, führt das auf
eine Legendre-transformierte erzeugende Funktion F3 (pj , Qj , t) gemäß
F3 (pj , Qj , t) = F1 (qj , Qj , t) −
X
pj qj
(3.236)
j
mit dem totalen Differential
dF3 = −
X
qj dpj −
j
X
Pj dQj − (H − H̃) dt.
(3.237)
∂F3
,
∂Qj
(3.238)
j
Somit ist für diesen Fall
qj = −
∂F3
,
∂pj
Pj = −
und
H̃ = H +
∂F3
;
∂t
(3.239)
die Gleichungen (3.238) definieren nun die kanonische Transformation.
Schließlich kann man in F1 auch simultan Qj durch Pj = −∂F1 /∂Qj und qj durch
pj = ∂F1 /∂qj ersetzen, was auf
F4 (pj , Pj , t) = F1 (qj , Qj , t) +
X
j
Pj Qj −
X
p j qj
(3.240)
j
141
3 Analytische Mechanik
mit dem zugehörigen totalen Differential
dF4 = −
X
qj dpj +
X
j
Qj dPj − (H − H̃) dt
(3.241)
j
führt. Daraus liest man ab
qj = −
∂F4
,
∂pj
Qj =
∂F4
,
∂Pj
(3.242)
und
H̃ = H +
∂F4
;
∂t
(3.243)
wiederum sind die zugehörigen kanonischen Transformationen durch (3.242) festgelegt.
Weitere Beispiele
Aus der erzeugenden Funktion
F2 =
f
X
ql Pl
(3.244)
l=1
folgt durch Anwendung von (3.234), (3.235) die identische Transformation
pj =
∂F2
= Pj ,
∂qj
Qj =
∂F2
= qj ,
∂Pj
H̃ = H.
(3.245)
Sei fl (qk , t), l = 1 . . . f , ein beliebiger differenzierbarer Satz von Funktionen der
alten Koordinaten und der Zeit. Dann führt die erzeugende Funktion
F2 =
f
X
fl (qk , t) Pl
(3.246)
l=1
mit (3.234), (3.235) auf die Transformation
pj =
f
X
∂fl
l=1
∂qj
Pl ,
Qj = fj (qk , t),
H̃ = H +
f
X
∂fl
l=1
∂t
Pl .
(3.247)
In (3.247)2 erkennt man die Punkttransformationen wieder, welche nur alte und neue
Koordinaten betreffen. Da der Funktionensatz der fl (qk , t) beliebig ist, folgt daraus,
daß sich durch Hinzunahme von (3.247)1 und (3.247)3 jede Punkttransformation zu
einer kanonischen Transformation ausbauen läßt.
Als letztes Beispiel betrachten wir noch einmal den eindimensionalen harmonischen
Oszillator. Nach Gl. (3.137) lautet dessen Hamiltonfunktion
H(q, p) =
142
p2
mω02 q 2
+
2m
2
(3.248)
3.4 Variationsprinzipien
(die Auslenkungskoordinate x soll hier mit q bezeichnet werden). Die erzeugende
Funktion
mω0 q 2
cot Q
2
definiert die kanonische Transformation
F1 =
∂F1
= mω0 q cot Q,
∂q
p=
P =−
(3.249)
∂F1
mω0 q 2
=
.
∂Q
2 sin2 Q
(3.250)
Auflösen der zweiten Gleichung nach q ergibt
s
q=
2P
sin Q,
mω0
(3.251)
und damit wird die erste Gleichung zu
s
p = mω0
q
2P
sin Q cot Q = 2P mω0 cos Q.
mω0
(3.252)
Die Beziehungen (3.251), (3.252) stellen die kanonische Transformation nach den
alten Koordinaten und Impulsen aufgelöst dar.
Da F1 die Zeit nicht explizit enthält, ist H̃ = H. Man rechnet
H̃ =
p2
mω02 q 2
+
= ω0 P cos2 Q + ω0 P sin2 Q
2m
2
⇒
H̃ = ω0 P.
(3.253)
Man erkennt, daß die neue Hamiltonfunktion H̃ zyklisch in der transformierten Koordinate Q ist (vor der Transformation war sie das nicht!). Es folgt sofort, daß der
konjugierte Impuls P eine Erhaltungsgröße ist. Weil darüberhinaus H bzw. H̃ der
Gesamtenergie E entsprechen, gilt also
P =
H̃
E
=
= const.
ω0
ω0
(3.254)
Die zeitliche Evolution von Q folgt aus der verbleibenden kanonischen Gleichung:
Q̇ =
∂ H̃
= ω0
∂P
⇒ Q(t) = ω0 t + ϕ0
s
⇒ q(t) =
2P
sin(ω0 t + ϕ0 ) =
mω0
s
2E
sin(ω0 t + ϕ0 ).
mω02
(3.255)
Man erhält in der Tat die wohlbekannte harmonische Schwingung, ohne aber mehr
als die triviale Differentialgleichung Q̇ = ω0 lösen zu müssen! Der Clou bei der Sache war nämlich, eine geeignete kanonische Transformation angewendet zu haben,
die alle Koordinaten des Problems (es gibt ja nur eine) zu zyklischen Koordinaten gemacht hat. Mit der Frage, wie man für allgemeine Probleme eine derartige
Vereinfachung finden kann, befaßt sich der folgende Abschnitt.
143
3 Analytische Mechanik
Invarianz der Poisson-Klammern
Ohne Beweis sei noch erwähnt, daß die in Abschnitt 3.3.5 behandelten PoissonKlammern invariant bezüglich kanonischer Transformationen sind. Sei also {u, v}p,q
die mit den qj , pj gebildete Poisson-Klammer, entsprechend {u, v}P,Q die mit den Qj ,
Pj gebildete Poisson-Klammer, und die neuen und alten Koordinaten und Impulse
über eine kanonische Transformation verknüpft, dann gilt
{u, v}p,q = {u, v}P,Q .
(3.256)
Diese Invarianzeigenschaft kann man ausnutzen, um zu überprüfen, ob eine gegebene
Transformation der Form (3.221) kanonisch ist. Dann müssen nämlich die Beziehungen (3.129) auch für die Poisson-Klammern {·, ·}P,Q gelten, d. h.,
{qk , ql }P,Q = 0,
{pk , pl }P,Q = 0,
{pk , ql }P,Q = δkl .
(3.257)
Das ist eine notwendige und hinreichende, ferner durch einfaches Ausrechnen leicht
nachzuprüfende Bedingung für das Vorliegen einer kanonischen Transformation.
3.5 Hamilton-Jacobische Theorie
3.5.1 Hamiltonsche Wirkungsfunktion und Hamilton-Jacobische
Gleichung
Die obige Lösung des Problems “eindimensionaler harmonischer Oszillator” bestand
darin, eine kanonische Transformation anzuwenden, die die eine Koordinate q des
Problems zyklisch gemacht hat. Es stellt sich die Frage, ob ein derartiges Vorgehen,
welches die Lösung der kanonischen Gleichungen (Differentialgleichungen der Bewegung) zu einer Trivialität macht, verallgemeinert werden kann. Das ist in der Tat
prinzipiell möglich; die Schwierigkeit wird dabei auf die Bestimmung der entsprechenden erzeugenden Funktion abgewälzt.
Wir versuchen also nun, für ein beliebiges konservatives holonomes System eine
kanonische Transformation zu finden, die alle Koordinaten zyklisch werden läßt.
Das ist insbesondere dann gegeben, wenn die neue Hamiltonfunktion H̃ identisch
verschwindet. Gesucht ist also eine erzeugende Funktion, die vom Typ F2 (qj , Pj , t)
sein soll, mit der Eigenschaft [vgl. Gl. (3.235)]
H̃(Qj , Pj , t) = H(qj , pj , t) +
∂F2
= 0.
∂t
(3.258)
Man bezeichnet dieses F2 (qj , Pj , t) als Hamiltonsche Wirkungsfunktion S(qj , Pj , t).
Da H̃ nach Konstruktion in allen Koordinaten zyklisch ist, sind die neuen Impulse
Konstanten:
Pj (t) = αj = const.
144
(3.259)
3.5 Hamilton-Jacobische Theorie
Wegen der Relationen (3.234) ist weiterhin
pj =
∂S
,
∂qj
Qj =
∂S
,
∂Pj
(3.260)
so daß aus Gl. (3.258) folgt
∂
∂S
S(qj , αj , t) + H(qj ,
, t) = 0.
∂t
∂qj
(3.261)
Das ist eine partielle Differentialgleichung für die Hamiltonsche Wirkungsfunktion
S in den f + 1 Variablen qj und t, wobei zusätzlich f konstante Parameter αj
auftreten. Sie wird als Hamilton-Jacobische Gleichung bezeichnet. Da S nur in Form
von partiellen Ableitungen vorkommt, ist S bei der Lösung dieser Gleichung lediglich
bis auf eine additive Konstante bestimmbar.
Falls es gelingt, die Hamiltonsche Wirkungsfunktion nach Gl. (3.261) zu bestimmen, ist das weitere Vorgehen sehr einfach. Die transformierten Impulse sind nach
Gl. (3.259) alle konstant, und wegen H̃ = 0 gilt das auch für die transformierten
Koordinaten:
Q̇j =
∂ H̃
=0
∂Pj
⇒
Qj (t) = βj = const.
(3.262)
Das eigentlich gesuchte Zeitverhalten der ursprünglichen Koordinaten und Impulse
ergibt sich durch Einsetzen der Beziehungen (3.259) und (3.262) in die von S erzeugte
kanonische Transformation:
qj (t) = qj (Qk = βk , Pk = αk , t),
pj (t) = pj (Qk = βk , Pk = αk , t).
(3.263)
Die 2f Konstanten αk , βk sind dabei aus den Anfangsbedingungen zu bestimmen.
Es existiert ein direkter Zusammenhang zwischen der Hamiltonschen Wirkungsfunktion und dem im Zusammenhang mit dem Hamiltonschen Prinzip betrachteten Wirkungsintegral (3.196) (Zeitintegral der Lagrange-Funktion). Wegen (3.259), (3.260),
(3.261) und der Definition der Hamiltonfunktion ist nämlich
X ∂S
dS X ∂S
∂S X
=
q̇j +
α̇j +
=
pj q̇j − H = L,
dt
∂t
j ∂qj
j ∂αj
j
(3.264)
so daß
Zt2
S(qj (t2 ), αj , t2 ) − S(qj (t1 ), αj , t1 ) =
L(qj (t), q̇j (t), t) dt,
(3.265)
t1
bzw. in knapper gehaltener Notation
Zt2
S(2) − S(1) =
L dt.
(3.266)
t1
145
3 Analytische Mechanik
Die Differenz der Werte der Wirkungsfunktion zu den Zeiten t1 und t2 ist also
gleich dem Wirkungsintegral zwischen diesen Zeitpunkten. Man kann dieses Ergebnis
natürlich auch in der unbestimmten Form
Zt
L(qj (t0 ), q̇j (t0 ), t0 ) dt0 + S0
S(qj (t), αj , t) =
(3.267)
t0
schreiben.
3.5.2 Verkürzte Wirkungsfunktion und verkürzte
Hamilton-Jacobische Gleichung
Wir beschränken uns nun auf Systeme, für die die ursprüngliche Hamiltonfunktion
H nicht explizit zeitabhängig und gleich der konstanten Gesamtenergie E ist [das ist
immer dann der Fall, wenn die definierenden Transformationen (3.5) nicht explizit
zeitabhängig sind]. Die Hamilton-Jacobische Gleichung (3.261) lautet dann
∂S
∂S
+ H(qj ,
) = 0.
(3.268)
∂t
∂qj
Wegen H = E = const kann die Zeitintegration ausgeführt werden:
∂S
= −E ⇒ S(qj , αj , t) = W (qj , αj ) − Et.
(3.269)
∂t
Die hierbei auftretende noch zu bestimmende Funktion W (qj , αj ) heißt verkürzte
Wirkungsfunktion.
Einsetzen des Teilergebnisses (3.269) für S in Gl. (3.268) ergibt
∂W
∂W
−E + H(qj ,
) = 0 ⇒ H(qj ,
)=E
(3.270)
∂qj
∂qj
als zeitunabhängige partielle Differentialgleichung für die verkürzte Wirkungsfunktion. Diese Differentialgleichung wird als verkürzte Hamilton-Jacobische Gleichung
bezeichnet.
Für die totale zeitliche Ableitung der verkürzten Wirkungsfunktion findet man analog zu Gl. (3.264)
X ∂W
X ∂W
X ∂S
X
dW
pj q̇j ,
(3.271)
=
q̇j +
α̇j =
q̇j =
dt
j ∂αj
j ∂qj
j
j ∂qj
und somit
Zt2 X
W (2) − W (1) =
pj q̇j dt = A.
(3.272)
j
t1
Die Differenz der Werte der verkürzten Wirkungsfunktion zu den Zeiten t1 und t2
ist also gleich der in Gl. (3.205) definierten Wirkung A zwischen diesen Zeitpunkten.
Die unbestimmte Version hiervon ist
W (qj (t), αj ) =
Zt X
t0
146
j
pj (t0 ) q̇j (t0 ) dt0 + W0
(3.273)
3.5 Hamilton-Jacobische Theorie
3.5.3 Analogie zwischen klassischer Mechanik und
geometrischer Optik
Die verkürzte Wirkungsfunktion W hängt, abgesehen von den aus den Anfangsbedingungen bestimmten Konstanten αj , nur von den generalisierten Koordinaten qj
ab. Die (f − 1)-dimensionalen Hyperflächen mit konstantem W ,
W (qj , αj ) = const,
sind daher im f -dimensionalen Konfigurationsraum (Raum der Koordinaten) fest
und zeitlich unveränderlich angeordnet. Die analogen Hyperflächen mit konstanter
Wirkungsfunktion S bewegen sich wegen Gl. (3.269) durch den Konfigurationsraum:
S(qj , αj , t) = const
⇔
W (qj , αj ) = const + Et.
(3.274)
Zur Illustration dieses Sachverhalts siehe Abb. 3.11. Die Hyperflächen mit konstantem S können somit als Wellenfronten interpretiert werden, die im Konfigurationsraum fortschreiten (vergleichbar der Bewegung einer Stoßwelle durch die Luft).
Abbildung 3.11: Bewegung der Linien konstanter Wirkungsfunktion S in einem zweidimensionalen Konfigurationsraum.
Für die folgenden Betrachtungen beschränken wir uns auf einen einzelnen Massenpunkt, der sich frei (ohne Zwangsbedingungen) in einem konservativen Kraftfeld mit
zugehörigem Potential V (x) bewegt, und verwenden die drei kartesischen Koordinaten x, y, z als generalisierte Koordinaten. Dann sind die generalisierten Impulse
die Komponenten des gewöhnlichen Impulses p, und die Hamiltonfunktion lautet
H=
p2x + p2y + p2z
+ V (x, y, z).
2m
(3.275)
Der Konfigurationsraum ist für diesen Spezialfall der gewöhnliche IR3 , und S = const
beschreibt darin die Ausbreitung zweidimensionaler Wellenfronten.
Wie groß ist die Geschwindigkeit, mit der diese Wirkungswellen voranschreiten? Sie
läßt sich berechnen aus
u=
ds
,
dt
(3.276)
147
3 Analytische Mechanik
wobei ds die von der Fläche während des Zeitinkrements dt durchlaufene Strecke in
Normalenrichtung der Fläche ist (Abb. 3.11). Aus Gl. (3.274) folgt für S = const
dW = E dt,
(3.277)
und weiterhin ist mit n = grad W/kgrad W k
∂W
grad W
ds = grad W · n ds = grad W ·
ds = kgrad W k ds.(3.278)
∂n
kgrad W k
dW =
Somit folgt aus Gl. (3.276)
u=E
ds
E
=
.
dW
kgrad W k
(3.279)
Die Größe kgrad W k kann mit der Hamiltonfunktion (3.275) aus der verkürzten
Hamilton-Jacobischen Gleichung (3.270) bestimmt werden:
Ã
1 ∂W
2m ∂x
!2
Ã
∂W
+
∂y
!2
Ã
∂W
+
∂z
!2
+V =E
⇒ kgrad W k2 = 2m(E − V ) = 2mT.
(3.280)
Für die Ausbreitungsgeschwindigkeit u der Wirkungswellen ergibt sich daher
u= √
E
E
E
=√
= ,
2
2
p
2mT
mv
(3.281)
sie ist offensichtlich vom Betrag der Teilchengeschwindigkeit v verschieden.
Die Ausbreitungsrichtung der Wirkungswellen stimmt jedoch mit der Bewegungsrichtung des Massenpunktes überein, denn nach Gln. (3.260) und (3.269) ist
pj =
∂S
∂W
=
∂xj
∂xj
⇒
p = mv = grad S = grad W
⇒
v k n.
(3.282)
Mit anderen Worten sind die möglichen Bahnkurven des Massenpunktes gegeben
durch die Orthogonaltrajektorien der Flächen konstanter Wirkung S = const bzw.
W = const (Abb. 3.12).
Wir werden im folgenden sehen, daß eine vollständige Analogie zwischen der soeben
formulierten klassischen Mechanik in Hamilton-Jacobischer Darstellung und der geometrischen Optik besteht. Licht ist bekanntlich eine elektromagnetische Welle, deren
Ausbreitung im Vakuum durch eine Wellengleichung der Form
∂2Φ
− c20 ∇2 Φ = 0
∂t2
(3.283)
beschrieben werden kann. Dabei ist c0 die Vakuum-Lichtgeschwindigkeit, und Φ steht
stellvertretend für das elektrische und magnetische Feld (der Vektorcharakter dieser
148
3.5 Hamilton-Jacobische Theorie
Abbildung 3.12: Bahnkurven als Orthogonaltrajektorien der Wirkungswellen.
Felder wird der Einfachheit halber ignoriert). Sie hat unter anderem ebene Wellen
der Form
Φ = Φ0 exp{i(k · x − ωt)} = Φ0 exp{(ik(ek · x − c0 t)}
(3.284)
als Lösung. Dabei ist k = 2π/λ die Wellenzahl und ω = 2π/T die Kreisfrequenz.
Der Einheitsvektor ek zeigt in Ausbreitungsrichtung der ebenen Welle, und ferner
gilt c0 = ω/k.
Betrachtet man statt dessen die Ausbreitung von Licht in isotropen, elektrisch neutralen und nichtleitenden Medien, so lautet die Wellengleichung
∂ 2Φ
c0
− c2 ∇2 Φ = 0,
c= .
(3.285)
2
∂t
n
√
Die Größe n heißt Brechungsindex; es gilt n = εµ (ε Dielektrizitätskonstante, µ
magnetische Permeabilität). Wir lassen zu, daß das Medium inhomogen ist, n also
von Ort zu Ort verschieden ist. Dann kann die Wellengleichung (3.285) nicht mehr
von ebenen Wellen der Form (3.284) erfüllt werden; wir versuchen statt dessen den
modifizierten Ansatz
Φ = A(x) exp {ik0 (Λ(x) − c0 t)}
(3.286)
mit als reell vorausgesetzten ortsabhängigen Größen A (Amplitude) und Λ (Eikonal). Weiterhin sei die Vakuum-Wellenzahl k0 = k(x)/n(x) konstant, und es gilt
k0 c0 = kc = ω. Dann ist
∂ 2Φ
= −k02 c20 A exp{. . .},
∂t2
grad Φ = grad A · exp{. . .} + ik0 A grad Λ · exp{. . .},
∇2 Φ = div grad Φ
= ∇2 A · exp{. . .} + 2ik0 grad A · grad Λ · exp{. . .}
³
+ik0 A div grad Λ · exp{. . .}
´
= ∇2 A · exp{. . .} + 2ik0 grad A · grad Λ · exp{. . .}
+ik0 A ∇2 Λ · exp{. . .} − k02 A grad Λ · grad Λ · exp{. . .}.
(3.287)
149
3 Analytische Mechanik
Einsetzen in die Wellengleichung (3.285) und Bildung des Real- und Imaginärteils
ergibt die zwei Gleichungen
−k02 c20 A −
⇒ −n2 −
Ã
⇒ n
2
c20 2
c20
∇
A
+
A k02 kgrad Λk2 = 0
n2
n2
1 ∇2 A
+ kgrad Λk2 = 0
k02 A
1 ∇2 A
1+ 2
k A
!
= kgrad Λk2
(3.288)
und
2 grad A · grad Λ + A ∇2 Λ = 0.
(3.289)
Bisher wurden keine Vereinfachungen vorgenommen; die beiden Gleichungen (3.288)
und (3.289) sind exakt. Wir führen nun die Kurzwellenapproximation (Näherung der
geometrischen Optik) ein, wobei angenommen wird, daß die Wellenlänge klein gegen
die räumliche Variation der Amplitude ist:
v
u 2
u |∇ A|
λ ¿ 2π t
|∇2 A|
¿ k2.
|A|
⇔
|A|
(3.290)
In dieser Näherung vereinfacht sich Gl. (3.288) zu
kgrad Λk2 = n2 .
(3.291)
Diese Beziehung wird als Eikonalgleichung bezeichnet (Eikonal = Lichtweg). Sie
ist vollkommen äquivalent zur verkürzten Hamilton-Jacobischen Gleichung (3.280),
wobei
√
W ∼ Λ,
2mT ∼ n
(3.292)
(das Symbol “∼” soll dabei “entspricht” bedeuten). Weiterhin spielt in dem Ansatz
(3.286) die Größe
Θ = Λ − c0 t
(3.293)
die Rolle der Phase, was ganz offensichtlich der Beziehung (3.269) zwischen S und
W entspricht. Man identifiziert hier
S ∼ Θ,
E ∼ c0 .
(3.294)
Damit konsistent ist die Entsprechung der Ausbreitungsgeschwindigkeiten von Wirkungswellen und Lichtwellen:
u= √
150
E
2mT
∼
c=
c0
.
n
(3.295)
3.5 Hamilton-Jacobische Theorie
Des weiteren entspricht der mechanischen Aussage, daß die möglichen Bahnkurven
die Orthogonaltrajektorien der Flächen konstanter Wirkung S sind, die geometrischoptische Aussage, daß die Lichtstrahlen die Orthogonaltrajektorien der Flächen konstanter Phase Θ sind.
Wir untersuchen abschließend das geometrisch-optische Pendant des Prinzips der
kleinsten Wirkung in der Form (3.219). Dazu multiplizieren wir es zunächst mit
Zwei und formen es auf eine Bahnintegration um:
Zt2
∆
Z2
2T dt = ∆
t1
⇒ ∆
1
Z2 √
2
2
Z
Z
dt
2T
2T
ds = 0
ds = ∆
ds = ∆ q
2T
ds
v
2T
/m
1
1
2mT ds = 0.
(3.296)
1
Unter Verwendung der Relation (3.292)2 hat das Prinzip der kleinsten Wirkung also
die geometrisch-optische Entsprechung
Z2
∆
n ds = 0.
(3.297)
1
Mit n = c0 /c (wobei c0 = const) kann man es wie folgt umschreiben:
Z2
∆
1
2
t2
Z
Z
1
dt
ds = ∆
ds = ∆ dt = ∆(t2 − t1 ) = 0.
c
ds
1
(3.298)
t1
Das ist das Fermatsche Prinzip, welches uns bereits begegnet ist. Es besagt, daß
ein Lichtstrahl zwischen zwei gegebenen Punkten denjenigen Weg nimmt, der die
Laufzeit stationär macht (in der Regel minimiert).
3.5.4 Von der klassischen Mechanik zur Wellenmechanik
Der letzte Abschnitt hat gezeigt, daß die klassische Mechanik eines freien Teilchens
im Potential äquivalent zur geometrischen Optik ist. Nun ist die geometrische Optik
lediglich die Kurzwellenapproximation einer Wellentheorie des Lichts. Es stellt sich
daher die Frage, ob auch diese Aussage auf die Mechanik übertragbar ist, d. h.,
ob die klassische Mechanik in analoger Weise die Kurzwellenapproximation einer
allgemeiner gültigen Wellenmechanik darstellt.
Wenn das stimmt, müssen in Analogie zu den elektromagnetischen Wellen Φ gemäß
Gl. (3.286) Materiewellen
Ψ existieren. Unter Verwendung der Entsprechungen (3.292),
√
(3.294) und 2mT = p ist dann
(
)
ik(x)
Φ = A(x) exp
(Λ(x) − c0 t)
n(x)
(
)
ik(x)
∼ Ψ = B(x) exp
(W (x) − Et) .
p(x)
(3.299)
151
3 Analytische Mechanik
Hierbei fehlt allerdings noch eine Aussage über die zugehörige Wellenlänge λ bzw.
die Wellenzahl k = 2π/λ. Die wellenoptische Beziehung k(x)/n(x) = k0 = const
legt nahe, daß im wellenmechanischen Fall k(x)/p(x) für ein gegebenes Wellenfeld
konstant ist. Wir postulieren daher die Relation
p = h̄k
⇔
Ã
h
λ=
p
h
wobei h̄ =
2π
!
(3.300)
mit der sogar universellen Konstanten h (Plancksches Wirkungsquantum, siehe Quantisierung der Poisson-Klammer-Beziehungen). Der Zusammenhang (3.300) ist als deBroglie-Beziehung bekannt, deren letztendliche Rechtfertigung aus experimentellen
Befunden zur Wellennatur von Teilchenbewegungen stammt (z. B. die Elektronenbeugung).
Durch Einsetzen der de-Broglie-Beziehung in Gl. (3.299) erhält man
( Ã
!)
W (x) E
Ψ = B(x) exp i
− t
h̄
h̄
.
(3.301)
Da der Vorfaktor vor der Zeit t die Kreisfrequenz ω sein muß, folgt daraus die
Energie-Frequenz-Beziehung
E = h̄ω = hν
(Frequenz ν = ω/2π).
(3.302)
Es verbleibt die Aufstellung der Wellengleichung für die Materiewellen. Wir setzen
in der entsprechenden wellenoptischen Gleichung (3.285) zunächst die Abhängigkeit
Φ ∝ exp(−iωt) explizit ein und erhalten
−ω 2 Φ −
c20 2
∇ Φ=0
n2
⇒
∇2 Φ +
n2 ω 2
Φ = 0.
c20
(3.303)
Mit den Entsprechungen (3.292), (3.294) lautet das wellenmechanische Pendant
2mT ω 2
Ψ = 0.
(3.304)
E2
Aufgrund der Energie-Frequenz-Beziehung (3.302) und T (x) = E − V (x) läßt sich
das wie folgt umformen:
∇2 Ψ +
∇2 Ψ +
⇒ −
2m(E − V (x))
Ψ=0
h̄2
h̄2 2
∇ Ψ + V (x)Ψ = EΨ
2m
h̄2 2
∇ + V (x).
(3.305)
2m
Das ist die wohlbekannte Schrödinger-Gleichung der Wellenmechanik in zeitunabhängiger Darstellung; Ĥ wird als Hamilton-Operator bezeichnet. Das Zeitverhalten
der Wellenfunktion ist dabei entsprechend zur Wellenoptik
⇒ ĤΨ = EΨ,
mit Ĥ = −
Ψ ∝ exp(−iωt) = exp(−i
152
E
t).
h̄
(3.306)
3.5 Hamilton-Jacobische Theorie
Eine direkte Übersetzung der zeitabhängigen optischen Wellengleichung (3.285) in
die Wellenmechanik führt allerdings nicht auf die zeitabhängige Schrödinger-Gleichung.
Man erhält statt dessen
∂ 2Ψ
E2
−
∇2 Ψ = 0.
∂t2
2m(E − V (x))
(3.307)
Das ist nicht akzeptabel, weil die Energie E gar nicht a priori definiert ist. Würde
man beispielsweise im Fall der kräftefreien Bewegung (V = 0) eine Superposition
mehrerer ebener Wellen verschiedener Frequenz ansetzen, würde jeder dieser Wellen
nach E = h̄ω eine andere Energie entsprechen, und man wüßte gar nicht, welches
E in Gl. (3.307) einzusetzen wäre. Bei der zeitunabhängigen Schrödingergleichung
(3.305) ist das anders, denn diese Gleichung setzt das Zeitverhalten Ψ ∝ exp(−iωt)
mit einer definierten Frequenz ω voraus, so daß auch E = h̄ω definiert ist.
Man könnte nun vermuten, daß die richtige zeitabhängige Gleichung für die kräftefreie Bewegung eines Massenpunkts ähnlich zur optischen Wellengleichung im Vakuum (3.283) die Form
∂ 2Ψ
− α02 ∇2 Ψ = 0
∂t2
(3.308)
hat, wobei α0 entsprechend zu c0 eine universelle Konstante wäre. Jedoch macht
auch das keinen Sinn, denn der Ansatz einer ebenen Welle Ψ ∝ exp{i(k · x − ωt)}
führt dann auf
−ω 2 Ψ + α02 k 2 Ψ = 0
⇒
ω = α0 k.
(3.309)
In Wirklichkeit ist aber mit (3.300) und (3.302)
E=
p2
2m
⇒
h̄ω =
h̄2 k 2
2m
⇒
ω=
h̄ 2
k .
2m
(3.310)
Die richtige Dispersionsrelation (so bezeichnet man allgemein in Wellentheorien den
Zusammenhang zwischen Frequenz und Wellenzahl) ist also quadratisch und nicht
linear in k.
Gl. (3.310) läßt vermuten, daß die richtige zeitabhängige Wellengleichung von erster
Ordnung in der Zeit und von zweiter Ordnung im Ort sein muß. Dann kann sie aber
nicht mehr reell sein, wenn ebene Wellen als Lösung möglich sein sollen. Versucht
man für die kräftefreie Bewegung
h̄2 2
∂Ψ
=−
∇ Ψ,
ih̄
∂t
2m
(3.311)
so stellt man fest, daß sowohl ebene Wellen Ψ ∝ exp{i(k · x − ωt)} Lösungen sind,
als auch die richtige Dispersionsrelation (3.310) herauskommt:
ih̄ · (−iω) Ψ = −
h̄2
· (−k 2 ) Ψ
2m
⇒
ω=
h̄ 2
k .
2m
(3.312)
153
3 Analytische Mechanik
Offenbar ist also Gl. (3.311) die korrekte zeitabhängige Wellengleichung für die
kräftefreie Bewegung eines Massenpunktes.
Auf der rechten Seite von Gl. (3.311) steht nach (3.305) gerade der HamiltonOperator für die kräftefreie Bewegung:
ih̄
∂Ψ
= ĤΨ.
∂t
(3.313)
Das legt nahe, daß im allgemeinen Fall mit nichtverschwindendem Potential V die
zeitabhängige Wellengleichung ebenfalls durch (3.313) gegeben ist, wobei dann der
Hamilton-Operator gemäß (3.305) zu verwenden ist. Man bezeichnet Gl. (3.313) als
zeitabhängige Schrödinger-Gleichung.
Abschließend sei noch kurz auf die physikalische Bedeutung der Materiewellen eingegangen. Nach der gängigen statistischen Interpretation entspricht das Absolutquadrat der Wellenfunktion |Ψ|2 der Aufenthaltswahrscheinlichkeitsdichte des Massenpunktes im Raum. Das bedeutet,
dw = |Ψ|2 (x, t) dV
(3.314)
ist die Wahrscheinlichkeit dafür, daß sich der Massenpunkt zum Zeitpunkt t im
Volumenelement dV befindet. Da die Aufenthaltswahrscheinlichkeit im gesamten
Raum natürlich Eins beträgt, folgt daraus die Normierungsbedingung
Z
|Ψ|2 (x, t) dV = 1,
(3.315)
R
I3
welche bei einem konkreten Problem durch geeignete Wahl des Vorfaktors der Wellenfunktion sichergestellt werden muß.
154
4 Spezielle Relativitätstheorie
4.1 Grundlegende Begriffe
Wir führen nun einige für die spezielle Relativitätstheorie grundlegende Begriffe ein,
jedoch zunächst noch ohne den Rahmen der bisher diskutierten klassischen Mechanik
zu verlassen.
Unter der vierdimensionalen Raumzeit, auch als Welt-Raum oder Minkowski-Raum
bezeichnet, sei die Zusammenfassung des dreidimensionalen Ortsraums und der Zeit
verstanden. Die Punkte in diesem Raum (“Ereignisse”) sind also durch Angabe von
drei Ortskoordinaten, z.B. den kartesischen Koordinaten x, y, z, und einer Zeitkoordinate t definiert. Damit alle Koordinaten die gleiche Dimension haben, wird die
Zeit noch mit einem universellen Geschwindigkeitsmaß multipliziert; hierfür bietet
sich die Lichtgeschwindigkeit im Vakuum
c = 299 792 458 m/s
an. Jedem Punkt im Minkowski-Raum (Ereignis) entspricht somit ein Orts-Zeit-Vierervektor,
x =
µ
x0
x1
x2
x3
=
ct
x
y
z
=
Ã
ct
x
!
.
(4.1)
Die Bahn eines Massenpunktes, welche wir in Abschnitt 1.3 als Raumkurve x(t) im
dreidimensionalen Ortsraum kennengelernt hatten, kann natürlich auch als Raumkurve (ct, x(t)) im Minkowski-Raum dargestellt werden und wird dann als Weltlinie bezeichnet. Die entsprechende grafische Darstellung, welche natürlich nur bei
Beschränkung auf eine oder zwei räumliche Dimensionen möglich ist, heißt Minkowski-Diagramm (Abb. 4.1).
Es sei angenommen, dass sich die Koordinaten x, y, z und ct auf ein ruhendes
Inertialsystem Σ mit Ursprung und Achsen {O, ei } beziehen, und dass im Ursprung
xµ = 0 für einen Augenblick ein Licht aufblitzt. Dieser Blitz löst eine Kugelwelle aus,
die sich mit Lichtgeschwindigkeit in den Ortsraum ausbreitet. Für die Ortsvektoren
der Kugelwelle zur Zeit t gilt also
x2 = (ct)2
⇔
(x0 )2 − (x1 )2 − (x2 )2 − (x3 )2 = 0.
(4.2)
155
4 Spezielle Relativitätstheorie
ct
(1)
(3)
(4)
(2)
x
Abbildung 4.1: Minkowski-Diagramm der Weltlinien eindimensionaler Bewegungen (nur x-Richtung). (1) ruhender Massenpunkt, (2) geradliniggleichförmige Bewegung, (3) harmonische Schwingung. (4) kann keine Weltlinie einer Bewegung sein, da ein Massenpunkt nicht gleichzeitig an zwei Orten sein kann.
Wir nehmen diesen Befund zum Anlass, eine nicht-euklidische Metrik des MinkowskiRaums einzuführen, welche das Längenquadrat s2 eines beliebigen Orts-Zeit-Vierervektors xµ als
s2 = (ct)2 − x2
= (x0 )2 − (x1 )2 − (x2 )2 − (x3 )2
(4.3)
definiert. Die Orts-Zeit-Vierervektoren obiger Kugelwelle haben nach dieser Definition für alle Zeiten die Länge Null. Man bezeichnet daher das Längenmaß (4.3) auch
als Lichtmetrik. Mit dem metrischen Tensor
gαβ =
1
0
0
0
0 −1
0
0
0
0 −1
0
0
0
0 −1
(4.4)
lässt sie sich kompakt in der Form
s2 = gαβ xα xβ
(4.5)
darstellen. Hier ist wieder die Einsteinsche Summenkonvention anzuwenden, wobei
sich griechische Indices generell auf den vierdimensionalen Minkowski-Raum beziehen, also über die Werte 0, 1, 2, 3 laufen sollen.
Bei der Lichtmetrik handelt es sich nicht um eine Metrik im streng mathematischen
Sinn, da das Längenquadrat sowohl positive als auch negative Werte annehmen kann
156
4.2 Lorentz-Transformation
(man spricht daher auch von Pseudometrik ). Für Orts-Zeit-Vierervektoren (Ereignisse) xµ mit s2 > 0 überwiegt der zeitliche Anteil, und man bezeichnet sie als zeitartig. Dahingegen überwiegt im Fall s2 < 0 der räumliche Anteil, und man spricht
von raumartigen Orts-Zeit-Vierervektoren. Da der Grenzfall s2 = 0, wie wir gesehen
haben, gerade einem vom Ursprung ausgehenden Lichtsignal entspricht (“lichtartig”), sind zeitartige Ereignisse vom Ursprung aus mit Unterlichtgeschwindigkeit,
raumartige Ereignisse dagegen nur mit Überlichtgeschwindigkeit zu erreichen. Im
Rahmen der bisher behandelten, auf den Newtonschen Gesetzen aufbauenden klassischen Mechanik wäre beides möglich. Wir werden jedoch gleich sehen, dass dies
nicht der Realität entspricht.
Für zwei Orts-Zeit-Vierervektoren xµ(1) und xµ(2) setzt man analog zu (4.3) und (4.5)
das Abstandsquadrat
s212 = c2 (t(1) − t(2) )2 − (x(1) − x(2) )2 = gαβ (xα(1) − xα(2) )(xβ(1) − xβ(2) ).
(4.6)
Der Abstand ist zeitartig für s212 > 0, lichtartig für s212 = 0 und raumartig für s212 < 0.
4.2 Lorentz-Transformation
Wir kommen noch einmal zurück auf die durch (4.2) beschriebene, sich mit c in alle
Richtungen ausbreitende Kugelwelle bezüglich des ruhenden Inertialsystems Σ mit
Ursprung und Achsen {O, ei }. Betrachten wir diese Welle von einem Inertialsystem
Σ̄ mit {Ō, ēi } aus, dessen Achsrichtungen mit denen von Σ zusammenfallen und das
sich mit der Geschwindigkeit v entlang der positiven x-Achse bewegt [Führungsgeschwindigkeit ḃ = vex , vgl. Gl. (1.158)], dann müsste sich die Welle nach den
Regeln der Galilei-Transformation in positive x? -Richtung mit der Relativgeschwindigkeit c − v, in negative x? -Richtung dagegen mit c + v ausbreiten, also deformiert
erscheinen.
Da sich die Erde mit ca. 30 km/s um die Sonne bewegt, müsste sich diese Richtungsabhändigkeit der Lichtgeschwindigkeit auf der Erde experimentell nachweisen lassen. Dies wurde Ende des 19. Jahrhunderts mit dem interferometrischen MichelsonMorley-Experiment versucht, mit negativem Ergebnis! Die Lichtgeschwindigkeit im
Vakuum erweist sich bis zum heutigen Tag als unter allen Umständen konstant. Wir
notieren das als grundlegendes
Prinzip der Konstanz der Lichtgeschwindigkeit
Die Lichtgeschwindigkeit hat im Vakuum zu allen Zeiten und an allen
Orten den konstanten Wert c = 299 792 458 m/s; sie ist somit von Bewegungen der Quelle und des Beobachters unabhängig.
Die Galilei-Transformation, welche ein Inertialsystem in ein anderes überführt, ist
also offenbar falsch, und es stellt sich die Frage, wie die richtige Transformation zwischen zwei Inertialsystemen Σ und Σ̄ (“allgemeine Lorentz-Transformation”) aussieht. Dazu betrachten wir den oben beschriebenen Spezialfall paralleler Achsen
157
4 Spezielle Relativitätstheorie
(ei = ēi ) bei Führungsgeschwindigkeit ḃ = vex , und weiterhin sollen die Ursprünge
zur Zeit t = 0 zusammenfallen (O = Ō) (“spezielle Lorentz-Transformation”); siehe
Abb. 4.2.
ey
P (ct, x), (ct, x)
v
S
S
O
ez
ey
ex
O
ez
ex
Abbildung 4.2: Zur Lorentz-Transformation: Zwei Inertialsysteme Σ und Σ̄ mit parallelen Achsen und Relativgeschwindigkeit v in x-Richtung. Das Ereignis P hat bezüglich Σ die Koordinaten (ct, x) und bezüglich Σ̄
die Koordinaten (ct̄, x̄).
Die Konstanz der Lichtgeschwindigkeit sagt aus, dass die aus einem Lichtblitz im
Ursprung resultierende Welle in Σ und Σ̄ als Kugelwelle wahrgenommen wird, die
sich mit der Geschwindigkeit c ausbreitet. Es muss also neben (4.2) auch
x̄2 = (ct̄)2
⇔
(x̄0 )2 − (x̄1 )2 − (x̄2 )2 − (x̄3 )2 = 0
(4.7)
gelten, sodass folgt
(x0 )2 − (x1 )2 − (x2 )2 − (x3 )2 = (x̄0 )2 − (x̄1 )2 − (x̄2 )2 − (x̄3 )2 ,
(4.8)
bzw. mit den Längenquadraten geschrieben
s2 = s̄2 .
(4.9)
Das Längenquadrat eines Orts-Zeit-Vierervektors ist also invariant unter LorentzTransformationen (“Lorentz-Invariante”).
Zur Berechnung der Transformationsregeln versuchen wir den linearen Ansatz
x̄µ = Lµ λ xλ ,
(4.10)
wobei wir weiter annehmen, dass aufgrund der Relativbewegung in x-Richtung die
y- und z-Koordinaten in beiden Systemen gleich sind:
x2 = x̄2 ,
x3 = x̄3 .
(4.11)
(Anm.: Falls mit diesen Annahmen eine Lösung gefunden werden kann, muss diese
aufgrund der physikalisch plausiblen Eindeutigkeit die gesuchte Transformation sein.
158
4.2 Lorentz-Transformation
Andernfalls waren die Annahmen falsch.) Die Transformationsmatrix hat dann die
Form
Lµ λ =
L0 0 L0 1
L1 0 L1 1
0
0
0
0
0
0
1
0
0
0
0
1
.
(4.12)
Die Invarianz (4.9) vereinfacht sich mit (4.11) zu
(x0 )2 − (x1 )2 = (x̄0 )2 − (x̄1 )2 ,
(4.13)
und somit
(L0 0 x0 + L0 1 x1 )2 − (L1 0 x0 + L1 1 x1 )2 = (x0 )2 − (x1 )2
⇒ ((L0 0 )2 − (L1 0 )2 ) (x0 )2 + ((L0 1 )2 − (L1 1 )2 ) (x1 )2 + 2(L0 0 L0 1 − L1 0 L1 1 ) x0 x1
= (x0 )2 − (x1 )2
⇒ [(x0 )2 ] :
[(x1 )2 ] :
[x0 x1 ] :
(L0 0 )2 − (L1 0 )2 = 1,
(L1 1 )2 − (L0 1 )2 = 1,
L0 0 L0 1 − L1 0 L1 1 = 0.
(4.14)
Zur Lösung dieses Gleichungssystems setzen wir an
L0 0 = L1 1 = cosh χ,
L0 1 = L1 0 = − sinh χ,
(4.15)
wobei der Parameter χ noch zu bestimmen ist. Wegen der allgemeinen Beziehung
cosh2 χ − sinh2 χ = 1 erfüllt dieser Ansatz offenbar das Gleichungssystem.
Der noch offene Parameter χ kann aus der Bewegung des räumlichen Ursprungs von
Σ̄ (x̄1 = x̄2 = x̄3 = 0) bezüglich Σ ermittelt werden. Für diesen gilt
v
x1 = vt = x0 ,
c
(4.16)
und somit
0 = x̄1 = L1 0 x0 + L1 1 x1 = x1 cosh χ − x0 sinh χ
¶
µ
0 v
cosh χ − sinh χ
=x
c
v
⇒ tanh χ =
c
1
1
=q
,
⇒ cosh χ = q
1 − v 2 /c2
1 − tanh2 χ
sinh χ = cosh χ tanh χ = q
v/c
1 − v 2 /c2
.
(4.17)
(4.18)
159
4 Spezielle Relativitätstheorie
Wir führen noch die Abkürzungen
v
β= ,
c
γ=q
1
(4.19)
1 − v 2 /c2
ein, und erhalten somit für die Matrix der speziellen Lorentz-Transformation
γ
−βγ 0 0
−βγ
γ
0 0
0
0
1 0
0
0
0 1
Lµ λ =
.
(4.20)
Für deren Determinante findet man
det(Lµ λ ) = γ 2 − β 2 γ 2 = 1.
(4.21)
Lorentz-Transformationen sind also längenerhaltende lineare Transformationen mit
Determinante Eins und können somit als Drehungen im Minkowski-Raum interpretiert werden.
Für die inverse Lorentz-Transformation
xµ = (L−1 )µ λ x̄λ
(4.22)
ist die zugehörige Matrix einfach die Inverse zu (4.20), also
(L−1 )µ λ =
γ βγ 0 0
βγ γ 0 0
0
0 1 0
0
0 0 1
.
(4.23)
Es seien abschließend die Gleichungen der speziellen Lorentz-Transformation noch
explizit angegeben:
x − vt
x̄ = q
,
(4.24)
ȳ = y,
z̄ = z,
t − vx/c2
.
t̄ = q
1 − v 2 /c2
(4.25)
(4.26)
1 − v 2 /c2
(4.27)
Für kleine Geschwindigkeiten, also β = v/c ¿ 1, gehen sie in die Gleichungen der
Galilei-Transformation
x̄ = x − vt,
ȳ = y,
z̄ = z,
t̄ = t
(4.28)
über. Die Galilei-Transformation stellt daher den nichtrelativistischen Grenzfall der
Lorentz-Transformation dar.
160
4.3 Folgerungen aus der Lorentz-Transformation
4.3 Folgerungen
aus der Lorentz-Transformation
4.3.1 Lichtgeschwindigkeit als Grenzgeschwindigkeit
Eine unmittelbar einsichtige Folge aus den Gleichungen (4.24)–(4.27) der LorentzTransformation ist, dass offenbar nur Relativgeschwindigkeiten v < c möglich sind.
Andernfalls würden imaginäre Werte für die Koordinaten x̄ und t̄ resultieren, was
physikalisch unsinnig ist. Ein physikalischer Beobachter, und somit auch ein beliebiges materielles Objekt, kann sich relativ zu einem anderen Beobachter (Objekt) nur
mit Unterlichtgeschwindigkeit bewegen.
Daraus ergibt sich sofort, dass nur Ereignisse mit zeitartigem Abstand durch die
Bewegung eines materiellen Objekts überbrückbar sind. Dagegen können Ereignisse
mit lichtartigem Abstand nur durch ein Lichtsignal und Ereignisse mit raumartigem Abstand überhaupt nicht überbrückt werden. Ein kausaler Zusammenhang
zwischen zwei Ereignissen ist also nur bei zeit- oder lichtartigem Abstand möglich.
Man beachte in diesem Zusammenhang die Lorentz-Invarianz des Abstandsmaßes;
die Eigenschaft “zeitartiger/lichtartiger/raumartiger Abstand” ist also unabhängig
vom speziellen Bezugssystem.
4.3.2 Relativität der Gleichzeitigkeit
Gleichung (4.27) besagt, dass auch die Zeit vom physikalischen Beobachter abhängt,
eine nicht gerade alltägliche Erfahrung! Es seien zwei Ereignisse xµ(1) = (ct(1) , x(1) )
und xµ(2) = (ct(2) , x(2) ) bezüglich Σ gleichzeitig, also
t(1) = t(2)
⇔
∆t = t(1) − t(2) = 0.
(4.29)
Diese Ereignisse finden bezüglich Σ̄ zu den Zeiten
µ
t̄(1)
¶
vx(1)
= γ t(1) − 2
,
c
µ
t̄(2)
vx(2)
= γ t(1) − 2
c
¶
(4.30)
statt, sodass
∆t̄ = t̄(1) − t̄(2) = γ
v
(x(2) − x(1) ).
c2
(4.31)
Für v 6= 0 und x(1) 6= x(2) ist das von Null verschieden, die Ereignisse finden also im
Allgemeinen bezüglich Σ̄ nicht gleichzeitig statt.
4.3.3 Zeitdilatation und Zwillingsparadoxon
Wir betrachten zwei Ereignisse, die in Σ an einem festen Ort x zu zwei verschiedenen
Zeiten t(1) und t(2) stattfinden, also den zeitlichen Abstand
∆t = t(1) − t(2)
(4.32)
161
4 Spezielle Relativitätstheorie
haben. Im relativ dazu bewegten System Σ̄ werden diese Ereignisse zu den Zeiten
µ
t̄(1)
¶
vx
= γ t(1) − 2 ,
c
µ
t̄(2)
vx
= γ t(2) − 2
c
¶
(4.33)
beobachtet. Das ergibt den zeitlichen Abstand
∆t̄ = γ∆t = q
∆t
1 − v 2 /c2
> ∆t.
(4.34)
Das Zeitintervall ∆t im System Σ erscheint dem relativ dazu bewegten Beobachter
im System Σ̄ also um den Faktor γ > 1 gedehnt.
Werden andererseits von Σ aus zwei um ∆t̄ zeitlich getrennte Ereignisse in Σ̄ an
einem festen Ort x̄ beobachtet, ergibt sich
∆t = γ∆t̄
(4.35)
(was sich durch Anwendung der inversen Lorentz-Transformation sofort zeigen lässt).
In diesem Fall misst also der Beobachter in Σ das längere Zeitintervall. Es ist somit nicht möglich, in einem absoluten Sinn anzugeben, in welchem System die Zeit
schneller oder langsamer abläuft.
Nun etwas Science Fiction: Ein Astronaut besteige im Alter von 30 Jahren ein Raumschiff, das sich mit der Geschwindigkeit 0.9 c auf eine Reise zu einem Nachbarstern
und wieder zurück begibt. Nach Ablauf von 10 Jahren Bordzeit kehrt der Astronaut
als 40-jähriger wieder auf die Erde zurück. Sein Zwillingsbruder ist während dieser
Reise auf der Erde geblieben. Wie alt ist der Zwillingsbruder?
Trotz der obigen Aussage, dass es sich nicht absolut angeben lässt, in welchem von
zwei relativ zueinander bewegten Inertialsystemen die Zeit schneller oder langsamer vergeht, kann diese Frage eindeutig beantwortet werden. Das gestellte Problem
enthält nämlich eine Asymmetrie. Um die Reise bis zur Rückkehr durchführen zu
können, erfährt der Astronaut mehrfach Beschleunigungs- und Bremsmanöver, befindet sich also nicht während der ganzen Zeit in ein- und demselben Inertialsystem,
im Gegensatz zu dem auf der Erde verbliebenen Bruder (Abb. 4.3).
Wir definieren für einen beliebigen Beobachter (für unser Problem sei das der Astronaut) die Eigenzeit τ als diejenige Zeit, die eine fest mit dem Beobachter verbundene
Uhr (Borduhr, Armbanduhr des Astronauten) misst. Da sich der Astronaut nicht
während seiner gesamten Reise in einem Inertialsystem befindet, kann dessen Eigenzeit nur in Inkrementen dτ durch Einführung eines momentanen Ruhesystems Σ̄,
welches sich zum betreffenden Zeitpunkt mit dem Raumschiff mitbewegt, mit der
Erdzeit t (Inertialsystem Σ) verglichen werden. Nach Gl. (4.35) erscheint dem Beobachter auf der Erde (Zwillingsbruder) das Zeitinkrement dτ um den Faktor γ(v)
gedehnt als
dt = γ(v) dτ.
162
(4.36)
4.3 Folgerungen aus der Lorentz-Transformation
ct
Erde
Nachbarstern
x
Astronaut
Zwillingsbruder
Abbildung 4.3: Zum Zwillingsparadoxon: Weltlinien des Astronauten und seines auf
der Erde zurückbleibenden Zwillingsbruders.
Integrieren wir das über das vorgegebene Intervall τ = τi . . . τf , wobei ∆τ = τf − τi =
10 a, so folgt
Zτf
∆t =
γ(v) dτ = γmean ∆τ,
(4.37)
τi
wobei γmean > 1 den Mittelwert von γ(v) über die gesamte Reise bezeichnet:
γmean
τf
1 Z
=
γ(v) dτ.
∆τ τ
(4.38)
i
Vernachlässigen wir die nötigen Beschleunigungs- und Bremsmanöver, so ist für unser Problem γmean ≈ γ(±0.9 c) ≈ 2.29, sodass ∆t ≈ 2.29 ∆τ = 22.9 a. Der Zwillingsbruder ist also 52.9 Jahre alt.
4.3.4 Längenkontraktion
Im Inertialsystem Σ befinde sich ein ruhender Stab der Länge l, welcher parallel zur
x-Achse ausgerichtet ist. Die Länge bezüglich Σ bestimmt sich also durch Ablesung
der Positionen der beiden Endpunkte x(1) , x(2) an einem Maßstab zu
l = x(1) − x(2) .
(4.39)
Bezüglich Σ̄ ist der Stab in Bewegung. Auch hier erfolgt die Längenmessung durch
Positionsbestimung der Endpunkte an einem Maßstab. Aufgrund der Relativbewegung ist darüberhinaus zu beachten, dass die Ablesung gleichzeitig erfolgt, d. h.,
t̄(1) = t̄(2) . Gemäß (4.24) ist
³
´
¯l = x̄(1) − x̄(2) = γ x(1) − x(2) − v(t(1) − t(2) ) ,
(4.40)
163
4 Spezielle Relativitätstheorie
wobei nach (4.27)
´
³
v
0 = t̄(1) − t̄(2) = γ t(1) − t(2) − 2 (x(1) − x(2) )
c
v
⇒ t(1) − t(2) = 2 (x(1) − x(2) )
c
³
´
v2
⇒ ¯l = γ x(1) − x(2) − 2 (x(1) − x(2) )
c
s
1
v2
⇒ ¯l = l = l 1 − 2 < l.
γ
c
(4.41)
Die Länge l im System Σ erscheint dem relativ dazu bewegten Beobachter im System
Σ̄ also um den Faktor 1/γ < 1 verkürzt. Das gilt allerdings nur bei Ausrichtung der
betrachteten Länge parallel zur Relativbewegung der Systeme (x-Richtung). Aufgrund (4.25), (4.26) bleiben Längen senkrecht zur Relativbewegung (y-, z-Richtung)
unverändert.
Analog zur Zeitdilatation erhält man die gleiche Längenkontraktion, wenn man einen
in Σ̄ ruhenden Stab der Länge ¯l von Σ aus betrachtet. Es ist dann
l=
1¯
l.
γ
(4.42)
Auch bei der Längenkontraktion ist es also nicht möglich, in einem absoluten Sinn
anzugeben, in welchem von zwei relativ zueinander bewegten Systemen Längen
verkürzt sind.
4.3.5 Addition von Geschwindigkeiten
Gegeben seien drei Inertialsysteme, die sich in x-Richtung wie folgt relativ zueinander bewegen:
Σ
|1
v
1
−→
v
2
Σ2 −→
{z
−→ v3
Σ3
(4.43)
}
Nach der Galilei-Transformation müsste einfach v3 = v1 + v2 sein. Das ist aber nicht
möglich, da dann z.B. für v1 = v2 = 0.9 c der Wert von v3 die Lichtgeschwindigkeit
übersteigen würde, was wir bereits als nicht möglich erkannt haben.
Seien L1 , L2 und L3 die entsprechenden Lorentz-Transformationen von Σ1 nach Σ2 ,
von Σ2 nach Σ3 bzw. von Σ1 nach Σ3 . Dann ist nach (4.43)
L3 = L2 ◦ L1 ,
(4.44)
also mit (4.20)
L3 =
164
γ2
−β2 γ2
−β2 γ2
γ2
0
0
0
0
0
0
1
0
0
0
0
1
γ1
−β1 γ1
−β1 γ1
γ1
0
0
0
0
0
0
1
0
0
0
0
1
4.3 Folgerungen aus der Lorentz-Transformation
=
!
=
γ1 γ2 (1 + β1 β2 ) −γ1 γ2 (β1 + β2 )
−γ1 γ2 (β1 + β2 ) γ1 γ2 (1 + β1 β2 )
0
0
0
0
γ3
−β3 γ3
−β3 γ3
γ3
0
0
0
0
0
0
1
0
0
0
0
1
.
0
0
1
0
0
0
0
1
(4.45)
Man identifiziert
γ3 = γ1 γ2 (1 + β1 β2 ),
β3 γ3 = γ1 γ2 (β1 + β2 ),
(4.46)
(4.47)
und Division dieser beiden Beziehungen ergibt
β3 =
β1 + β2
1 + β1 β2
⇔
v3 =
v1 + v2
v1 v2 .
1+ 2
c
(4.48)
Das ist das Einsteinsche Additionstheorem für Geschwindigkeiten. Es geht im nichtrelativistischen Grenzfall in die klassische Beziehung v3 = v1 + v2 über, ergibt jedoch
für v1 < c und v2 < c stets auch v3 < c, in Übereinstimmung mit der Eigenschaft
der Lichtgeschwindigkeit als Obergrenze für mögliche Relativgeschwindigkeiten.
4.3.6 Lichtkegel
Wir kommen noch einmal zurück auf die Überlegungen des zweiten Absatzes von
Abschnitt 4.3.1 und vergleichen ein beliebiges Ereignis P : xµ = (ct, x) mit dem
Ursprung O : xµ = (0, 0) des Minkowski-Raums. Die bezüglich O lichtartigen
Ereignisse, also solche mit dem Längenquadrat s2 = 0, entsprechen der Kugelwelle
x2 + y 2 + z 2 = (ct)2 .
(4.49)
Die entsprechende geometrische Figur wird als Lichtkegel bezeichnet. Dieser trennt
die zeitartigen von den raumartigen Ereignissen (Abb. 4.4), wobei nur zeitartige
Ereignisse vom Ursprung aus mit Unterlichtgeschwindigkeit erreichbar sind, also in
einem kausalen Zusammenhang mit dem Ursprung stehen können. Alle Weltlinien
von Bewegungen materieller Objekte, die durch den Ursprung verlaufen, müssen
daher innerhalb des Lichtkegels verlaufen (schattierter Bereich in Abb. 4.4). Ist P
dagegen raumartig, kann kein Kausalzusammenhang mit dem Ursprung bestehen.
In diesem Fall lässt sich sogar zeigen (Übung), dass ein spezielles Inertialsystem existiert, in welchem P und O gleichzeitig sind. Man sagt daher auch, alle raumartigen
Ereignisse sind in relativer Gleichzeitigkeit.
165
4 Spezielle Relativitätstheorie
ct
zeitartig
(Zukunft)
raumartig
Lichtkegel
x
zeitartig
(Vergangenheit)
Abbildung 4.4: Lichtkegel, zeitartige und raumartige Ereignisse im MinkowskiDiagramm (nur eine räumliche Dimension dargestellt).
4.4 Impulssatz für einen Massenpunkt
Im folgenden soll es darum gehen, eine relativistische Formulierung des zweiten Newtonschen Gesetzes
F =
dp
,
dt
(4.50)
welches ja die zentrale Bewegungsgleichung der Mechanik darstellt, zu finden. Dieses
Gesetz ist Galilei-invariant, aber nicht Lorentz-invariant, sodass es auf eine Lorentzinvariante vierdimensionale Form verallgemeinert werden muss, die im nichtrelativistischen Grenzfall wieder in (4.50) übergeht.
4.4.1 Eigenzeit, Vierergeschwindigkeit
und Viererbeschleunigung
Ein Massenpunkt bewege sich entlang einer Weltlinie xµ = (ct, x(t)). Die Änderung
von xµ während der infinitesimalen Zeitspanne dt sei dxµ . Da das Längenquadrat s2
im Minkowski-Raum generell Lorentz-invariant ist, gilt das natürlich auch für das
zu dxµ gehörende differentielle Längenquadrat
(ds)2 = (c dt)2 − (dx)2 = gαβ dxα dxβ .
(4.51)
Wegen der Konstanz der Lichtgeschwindigkeit ist folglich auch die Zeit-Größe
(dτ )2 =
(ds)2
1
= (dt)2 − 2 (dx)2
2
c
c
(4.52)
Lorentz-invariant (im Gegensatz zu dt !). Die physikalische Bedeutung von dτ kann
man sich klar machen, indem man auf ein mitgeführtes Inertialsystem Σ̄ transfor-
166
4.4 Impulssatz für einen Massenpunkt
miert, welches sich mit der Geschwindigkeit v = dx/dt bewegt. Dann ist nämlich
der Massenpunkt bezüglich Σ̄ in Ruhe, also dx̄ = 0, und somit
(dτ )2 = (dt̄)2 −
1
(dx̄)2 = (dt̄)2 .
c2
(4.53)
Die Lorentz-invariante Zeit-Größe dτ entspricht also der Zeit, die eine mit dem Massenpunkt verbundene Uhr misst, was wir bereits in Abschnitt 4.3.3 als Eigenzeit
bezeichnet hatten. Die Verknüpfung mit dt folgt aus (4.52),
1
(dτ )2 = (dt)2 − 2
c
⇒ dt = γ dτ,
Ã
dx
dt
!2
Ã
!
v2
(dt)2 = 1 − 2 (dt)2
c
(4.54)
was dem bereits bekannten Effekt der Zeitdilatation entspricht.
Wir definieren nun die Vierergeschwindigkeit als
uµ =
dxµ
.
dτ
(4.55)
Da sich dxµ gemäß der Lorentz-Transformation (4.20), also dx̄µ = Lµ λ dxλ transformiert und dτ invariant ist, transformiert sich auch die Vierergeschwindigkeit nach
der Lorentz-Transformation,
ūµ = Lµ λ uλ ,
(4.56)
und stellt somit einen sinnvollen Vierervektor im Minkowski-Raum dar. Mit (4.54)
sind dessen Komponenten
uµ = γ
dxµ
= (γc, γv).
dt
(4.57)
Für das Längenquadrat kuµ k2 [die Bezeichnung s2 sei dem Orts-Zeit-Vierervektor
vorbehalten] ergibt sich
kuµ k2 = γ 2 (c2 − v 2 ) =
c2 − v 2
= c2 ,
v2
1− 2
c
(4.58)
was natürlich wieder Lorentz-invariant ist.
Eine weitere Differentiation von (4.55) ergibt die Viererbeschleunigung
bµ =
duµ
,
dτ
(4.59)
welche wegen der Invarianz von dτ wieder ein Vierervektor ist, also der LorentzTransformation unterliegt. Für die Komponenten der Viererbeschleunigung rechnet
man mit (4.57)
bµ = γ
³ dγ
d
dγ ´
(γc, γv) = γc , γ 2 a + γv
dt
dt
dt
(4.60)
167
4 Spezielle Relativitätstheorie
Mit der Nebenrechnung
Ã
d
v2
dγ
=
1− 2
dt
dt
c
=
!−1/2
Ã
v2
1
=−
1− 2
2
c
!−3/2 µ
−
2v · a
c2
¶
γ3
v·a
c2
(4.61)
ergibt das
Ã
µ
b =
!
γ4
γ4
v · a, γ 2 a + 2 v(v · a) .
c
c
(4.62)
4.4.2 Impuls, Kraft und Energie
Sei m die Lorentz-invariante Ruhemasse des Massenpunktes, dann kann durch Multiplikation von (4.55) mit m sofort der Viererimpuls als
pµ = muµ = m
dxµ
= (mγc, mγv)
dτ
(4.63)
definiert werden. Dieser stellt wieder einen Vierervektor dar, transformiert sich also
gemäß
p̄µ = Lµ λ pλ .
(4.64)
Das Längenquadrat ist wegen (4.58)
kpµ k2 = m2 c2 .
(4.65)
Wir identifizieren den relativistischen Impuls als räumlichen Anteil des Viererimpulses (4.63),
prel = mγv,
(4.66)
was mit der Definition der geschwindigkeitsabhängigen relativistischen Masse
M = γm = q
m
1 − v 2 /c2
>m
(4.67)
die aus der nichtrelativistischen Mechanik bekannte Form
prel = M v
(4.68)
annimmt.
Offenbar lautet mit (4.66) bzw. (4.68) das relativistisch korrekte zweite Newtonsche
Gesetz
F =
168
dprel
.
dt
(4.69)
4.4 Impulssatz für einen Massenpunkt
Um das auf eine Lorentz-invariante Darstellung mit Vierervektoren zu bringen, multiplizieren wir zunächst mit γ,
γF = γ
dprel
dprel
=
.
dt
dτ
(4.70)
Die rechte Seite ist der räumliche Anteil von dpµ /dτ , was wegen (4.64) und der
Invarianz von dτ wieder ein Vierervektor ist. Also muss auch die linke Seite der
räumliche Anteil eines Kraft-Vierervektors
K µ = (K 0 , γF )
(4.71)
sein, welcher als Minkowski-Kraft bezeichnet wird. Die Komponente K 0 ist dabei
noch unbekannt. Die gesuchte Lorentz-invariante Verallgemeinerung des zweiten
Newtonschen Gesetzes lautet somit
Kµ =
dpµ
= mbµ .
dτ
(4.72)
Zur Bestimmung von K 0 wird (4.72) skalar mit der Vierergeschwindigkeit multipliziert und (4.58) verwendet,
´
duµ λ m d ³
dpµ λ
u = mgµλ
u =
gµλ uµ uλ
dτ
dτ
2 dτ
m d(c2 )
=
=0
2 dτ
gµλ K µ uλ = gµλ
⇒ γK 0 c − γ 2 F · v = 0
⇒ K0 = γ
F ·v
.
c
(4.73)
Damit ist der Vierervektor der Minkowski-Kraft vollständig bestimmt,
³ F ·v
Kµ = γ
c
´
, γF .
(4.74)
Was ist die Bedeutung der zeitlichen Komponente des Lorentz-invarianten zweiten
Newtonschen Gesetzes (4.72)? Man rechnet
K0 =
⇒ γ
dp0
dτ
F ·v
d(mγc)
=γ
c
dt
⇒ F ·v =
d(mγc2 )
.
dt
(4.75)
Offensichtlich stellt das die relativistische Bilanz der kinetischen Energie dar [vgl.
Gl. (1.177)], wobei die kinetische Energie selbst
Trel = mγc2 = M c2
(4.76)
169
4 Spezielle Relativitätstheorie
ist. Im nichtrelativistischen Grenzfall v/c ¿ 1 geht das über in
Ã
mc2
Trel = q
2
1 − v 2 /c2
= mc
!
³ v4 ´
v2
m
1+ 2 +O 4
≈ mc2 + v 2 .
2c
c
2
(4.77)
Das entspricht der nichtrelativistischen Form T = mv 2 /2 plus einem zusätzlichen
Beitrag
T0 = mc2 ,
(4.78)
welcher als Ruheenergie bezeichnet wird. Diese Ruheenergie ist sehr groß; beispielsweise erhält man für m = 1 g den Wert T0 = 8.988 × 1013 J! Nichtsdestotrotz fällt
in der Bilanz (4.75) dieser Beitrag aufgrund der Zeitdifferentiation wieder heraus,
sodass der nichtrelativistische Grenzfall auf die korrekte nichtrelativistische Bilanz
der kinetischen Energie führt. Im übrigen beschreiben die Gleichungen (4.76) und
(4.78) die berühmte Einsteinsche Äquivalenz zwischen Masse und Energie.
Wegen (4.76) kann man den Viererimpuls (4.63) auch als
pµ =
³T
rel
c
, prel
´
(4.79)
schreiben. Die zeitliche Komponente des Viererimpulses ist also bis auf einen konstanten Faktor gleich der relativistischen kinetischen Energie. Die Berechnung des
Längenquadrates von (4.79) führt mit (4.65) auf die interessante Energie-ImpulsBeziehung
2
Trel
− p2rel = m2 c2
c2
⇒
2
Trel
= p2rel c2 + (T0 )2 ,
(4.80)
deren Beiträge sich nach dem Satz von Pythagoras als Seiten eines rechtwinkligen
Dreiecks darstellen lassen (Abb. 4.5).
Trel
prel c
T0
Abbildung 4.5: Darstellung der Beiträge der Energie-Impuls-Beziehung als Seiten
eines rechtwinkligen Dreiecks.
Der nichtrelativistische Grenzfall der Energie-Impuls-Beziehung (4.80) ist durch (4.77)
bestimmt, was sich mit dem nichtrelativistischen Impuls auch als
T ≈ T0 +
170
p2
2m
(4.81)
4.4 Impulssatz für einen Massenpunkt
schreiben lässt. Im hochrelativistischen Grenzfall v/c → 1 ist dagegen der Anteil der
Ruheenergie vernachlässigbar, und man erhält
Trel ≈ prel c.
(4.82)
Diese Beziehung gilt sogar exakt für die Quanten des Lichts (Photonen), welche
keine Ruhemasse besitzen und sich stets mit Lichtgeschwindigkeit bewegen.
Als abschließendes Beispiel für eine relativistische Bewegung betrachten wir noch
einmal das Problem einer interstellaren Reise. Dabei werde ein Raumschiff der Ruhemasse m = 100 t = 105 kg mit der konstanten, in positive x-Richtung wirkenden
Schubkraft F = mg = 9.81 × 105 N bezüglich des momentanen Ruhesystems Σ̄ angetrieben. In letzterem ist natürlich v̄ = 0, sodass die Minkowski-Kraft nach (4.74)
einfach
K̄ µ = (0, F, 0, 0)
(4.83)
ist. Nach dem Lorentz-invarianten zweiten Newtonschen Gesetz (4.72) resultiert daraus die Viererbeschleunigung
b̄µ =
´
K̄ µ ³ F
= 0, , 0, 0 = (0, g, 0, 0).
m
m
(4.84)
Wegen (4.62) und v̄ = 0 ist ferner
b̄µ = (0, ā)
⇒
ā = g ex ;
(4.85)
die Raumfahrer spüren also aufgrund der daraus resultierenden Trägheitskraft stets
ein genau der Erdschwere entsprechendes scheinbares Gewicht, sodass sie sich zumindest diesbezüglich ganz wie zu Hause fühlen können.
Wir berechnen nun die Bewegung des Raumschiffs, wie sie von der Erde (Inertialsystem Σ) aus erscheint. Dazu nutzen wir aus, dass die Viererbeschleunigung ein
Vierervektor ist, also der Lorentz-Transformation unterliegt, und führen für (4.84)
die Transformation (L−1 )µ λ von Σ̄ nach Σ aus:
bµ = (L−1 )µ λ b̄λ = (L−1 )µ 1 g = (βγg, γg, 0, 0).
(4.86)
Die Geschwindigkeit v = vx folgt durch Integration der 1-Komponente dieses Ergebnisses mit der Anfangsbedingung v(t = 0) = 0 zu
d(γv)
du1
=γ
= γg
dτ
dt
v
⇒ γv = q
= gt
1 − v 2 /c2
µ
³ gt ´2 ¶
2
⇒ v 1+
= (gt)2
c
gt
⇒ v=q
.
1 + (gt/c)2
b1 =
(4.87)
171
4 Spezielle Relativitätstheorie
Für kleine Zeiten (t ¿ c/g ≈ 1 a) entspricht das dem nichtrelativistischen Ergebnis
v = gt, für große Zeiten (t À c/g) erhält man dagegen v → c, was die Bedeutung
der Lichtgeschwindigkeit als Grenzgeschwindigkeit explizit zeigt. Von der Erde aus
gesehen können die Raumfahrer also während eines Jahres maximal ein Lichtjahr
zurücklegen, was den Aktionsradius während realistischer Zeitintervalle von einigen
Jahrzehnten auf die unmittelbaren Nachbarsterne des Sonnensystems einschränkt.
Die Verhältnisse sind jedoch für die Raumfahrer selbst deutlich günstiger. Für das
Verhältnis von deren Eigenzeit (Bordzeit) τ zur Erdzeit t gilt nach (4.54) und (4.87)
dt = γ dτ
v
s
u
2
u
(gt)
1
1 − 2 dt = t1 − 2
dt =
dt.
2
c
c + (gt)
1 + (gt/c)2
s
⇒ dτ =
v2
(4.88)
Dies ist Bronstein-integrierbar und hat mit der Anfangsbedingung τ = 0 für t = 0
das Ergebnis
c
gt
τ = ln +
g
c
s
1+
³ gt ´2
c
=
µ
¶
c
gt
arsinh
,
g
c
(4.89)
bzw. umgekehrt
µ
¶
c
gτ
t = sinh
.
g
c
(4.90)
1 Jahr Bordzeit entspricht demnach 1.19 Jahren Erdzeit, 10 Jahre Bordzeit bereits
14780 Jahren Erdzeit, und 30 Jahre Bordzeit 1.38 × 1013 Jahren Erdzeit! Die Raumfahrer können also während einiger Jahrzehnte Bordzeit jedes Objekt des bekannten
Universums erreichen, allerdings um den Preis, dass bei einer eventuellen Rückkehr
die Erde längst nicht mehr existiert. Da jedoch der jahrzehntelangen Aufrechterhaltung der Beschleunigung eines Raumschiffs von konstant 1g gewisse technische
Schwierigkeiten im Wege stehen, wird eine solche fantastische Reise ohnehin noch
ein Weilchen auf sich warten lassen.
172