Kontrollfragen
Werbung

Rotationsmechanik
Seite 1
Vorwort
Das vorliegende Lehrbuch ist Teil eines ganzen Lehrgangs. In den nächsten fünf bis sechs Jahren
werden weitere Module erscheinen. Vorgesehen sind fünf zusätzliche Themenbände, welche sich mit
der Hydraulik, der Translationsmechanik, der Elektrizitätslehre, der Thermodynamik sowie den allgemeinen Grundlagen befassen. Ein letzter Band soll den übergreifenden Themen wie Schwingungen, Kopplungsmechanismen und offene Systeme gewidmet sein. Zusammen werden alle sieben
Module mehr Physik enthalten, als normalerweise an Fachhochschulen vermittelt wird. Trotzdem
werden einzelne Gebiete wie Wellenlehre, elektromagnetische Felder und Optik fehlen. Dies hängt
mit der völlig neuen Struktur dieses Kurses zusammen. Wie bei jedem Umbau musste einiges verschoben und anderes total eliminiert werden. Feld- und Wellenlehrer gehören eindeutig zur Kontinuumsphysik und sind dementsprechend in einen Kurs über räumlich ausgedehnte Systemen zu
integrieren. Ein Lehrbuch über die Physik des Kontinuums zu schreiben, wäre zwar mein innigster
Wunsch, doch aus pragmatischen Gründen werde ich vorerst die Physik der homogenen Systeme auf
der Basis einer allgemeinen Systemdynamik aufarbeiten. Das dritte Gebiet, das nicht zum vorliegenden Themenkreis passt, die geometrische Optik, hat mehr mit Geometrie als mit Physik zu tun.
Zudem sollten die einfachen Gesetzt der Strahlenoptik in der Sekundarschule und nicht erst an der
Fachhochschule vermittelt werden.
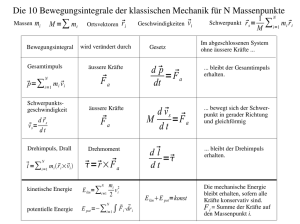
Aus dem nebenstehend abgebildeten Struktogramm des geplanten Physikkurses geht hervor, dass die Rotationsmechanik auf der Hydraulik und der Translationsmechanik aufbaut.
Vom fachlogischen Standpunkt aus hätten diese beiden Module vor dem nun vorliegenden
ersten Band erscheinen müssen. Zufällige
Ereignisse, wie Weiterbildungsveranstaltungen, kleine Projekte sowie ein spontaner Entschluss, haben mich dazu gebracht, mit der Rotationsmechanik zu beginnen. Ein weiteres
Motiv für die Wahl des ersten Themas möchte
ich noch speziell erwähnen: über kein anderes
Gebiet der Physik habe ich soviel nachgedacht
wie über die Rotationsmechanik. Dabei sind
didaktische Lehrstücke, Bilder und auch
Übungsbeispiele entstanden, wie sie in keinem
vergleichbaren Physikkurs zu finden sind.
Mengen
Energie
Geometrie
Hydraulik
Translationsmechanik
Elektrizität
Thermodynamik
Rotationsmechanik
Schwingungen
Kopplungsmechanismen
offeneSysteme
Die zentrale Idee dieses Physikkurses basiert auf einem Konzept, das in den siebziger Jahren an der
Universtität Karlsruhe von Prof. Dr. Gottfried Falk entwickelt und von seinem Nachfolger am Institut für Didaktik der Physik, Prof. Dr. Friedrich Herrmann, für die Sekundarschulstufe I umgearbeitet
worden ist. Nach gut zehn Jahren intensiver Arbeit haben wir, mein Kollege Hans Fuchs und ich, auf
der Basis der Karlsruher Ideen einen naturwissenschaftlichen Physikkurs für Ingenieure entwickelt,
dessen Bildungspotential bei weitem noch nicht voll ausgeschöpft ist. Die Physik der dynamischen
Systeme, so der Titel des ganzen Projekts, geht davon aus, dass in jedem Zweig der Physik eine mengenartige Primärgrösse das Geschehen dominiert. Den Mengen Volumen, Impuls, Drehimpuls, elektrische Ladung, Entropie und Stoffmenge entsprechen somit die Gebiete Hydraulik, Translationsmechanik, Rotationsmechanik, Elektrizitätslehre, Thermodynamik und chemische Thermodynamik.
Seite 2
Rotationsmechanik
Mengenartig heisst transportier- und speicherbar. Folglich lässt sich jede mengenartige Grösse
bezüglich eines geometrisch abgrenzbaren Systems bilanzieren. Die Momentanbilanz, welche die
Stromstärken und die Produktionsrate einer Menge mit der Änderungsrate des zugehörigen Inhaltes
verknüpft, bildet denn auch die erste von drei Säulen, auf denen die Physik der dynamischen
Systeme ruht. Die zweite Stütze liefert das Karlsruher Energiekonzept, das jeder Menge ein Potential
zuweist. Ein Potential beschreibt, wie stark eine Mengenstrom mit Energie beladen ist, wieviel Energie ein Strom mitschleppt. Fliesst ein Mengenstrom über eine Potentialdifferenz hinunter, setzt er
eine Prozessleistung frei. Mit der Unterscheidung zwischen Prozessleistung und zugeordnetem Energiestrom hoffen wir, etwas mehr Klarheit in die ganze Energiediskussion zu bringen. Falls man nur
die Prozessleistung und nicht etwa die Energie an sich als Arbeitsvermögen bezeichnet, kann man
auf die unsinnige Unterscheidung zwischen mehr oder weniger wertvoller Energie verzichten. Die
dritte Säule wird von den konstitutiven Gesetzen gebildet. Die Erkenntnis, dass siche viele Systemeigenschaften mit Hilfe der Begriffe Widerstand, Kapazität und Induktivität beschreiben lassen, ist
schon lange bekannt. Meines Wissens ist diese aus der Regelungstechnik stammende Strukturierungshilfe bis heute noch nie systematisch in einen Physikkurs integriert worden.
Bilanzgleichung, Energiezuordnung und Systemeigenschaften sind die zentralen Elementen der
Kontinummsphysik. Die Physik der dynamischen Systeme operiert also mit Begriffen, die kontinuumsgerecht sind. Wohl nennt sich der vorliegende Lehrgang Physik der homogenen Systeme und
rückt damit den starren Köper, das elektrische Netzwerk oder allgemein das räumlich nicht differenzierte System ins Zentrum. Trotzdem soll an dieser Stelle darauf hingewiesen werden, dass die Kontinuumsbetrachtung unabdingbarer Teil der Physik der dynamischen Systeme ist. Der Übergang vom
homogenen zum räumlich ausgedehenen System ist denn auch nur eine Frage der Mathematik. Mit
der räumlichen Differenzierung verwandeln sich die Bilanzen in Kontinuitätsgleichungen, die Unterscheidung zwischen zugeordnetem Energiestrom und Prozessleistung wird mit Hilfe der Vektoranalysis weiter geklärt und die Systemeigenschaften gehen in konstitutive Relationen zwischen den
beteiligten Grössen über.
Die Physik der dynamischen System lebt von Bildern. Eines der Bilder beschreibt die Transportvorgänge mit Hilfe des Stromes. So fliessen Impuls- oder Drehimpulsströme als „Kraftflüsse“ durch die
mechanisch belasteten Strukturen hindurch. Unter der Entropie stellt man sich am besten einen Wärmestoff vor, der von den beheizten Räumen durch die Wand nach draussen fliesst. Zusammen mit
dem bildhaften Strombegriff wird auch die Sprache der elektrischen Netzwerklehre auf die Mechanik und auf die Thermodynamik übertragen. Ein zweites Bild liefert das hydraulische Kraftwerk.
Analog zum hinunterfallenden Wasser vermag die Entropie in einem thermischen Kraftwerk oder der
Impuls in den Puffern eines auffahrenden Zuges Energie freizusetzen. Speziell in der Mechanik lassen sich mit Hilfe eines massgeschneiderten Flüssigkeitsbildes unzählige Prozesse mathematisch
beschreiben und berechnen. Die bildhafte Sprache und der konsequente Einsatz von graphischen
Darstellungen sollten eine Formelsammlung praktisch überflüssig machen. Dies wäre ein grosser
Fortschritt in der Grundausbildung der angehenden Ingenieure. Wer eines der unzähligen Formelbücher für Physik an Fachhochschulen schon einmal kritisch durchgeblättert und dabei gespürt hat, wie
mit dieser Art von Untericht die Neugierde und die Kreativität einer ganzen Generation von Studierenden zugeschüttet wird, dem muss der bildhafte Zugang zu den naturwissenschaftlichen Grundlagen einfach gefallen.
Kontinuumsgerechte Darstellung und bildhafte Ausgestaltung sind nicht die einzigen Vorteile des in
Winterthur gereiften Konzepts. Die Sprache der Systemdynamik, die dem ganzen Physikkurs
zugrunde liegt, bringt die Physik näher an die Technik und an die andern Naturwissenschaften heran.
Eine Systemdynamik, die das einengende Korsett der Differentialgleichungen abgestreift hat, sich
aber weiterhin an der Vielfalt, dem Aufbau und der begriffliche Strenge der physikalischen Theorien
Rotationsmechanik
Seite 3
orientiert, vermag zudem auf so unterschiedlichen Gebieten wie etwa Ökonomie, Ökologie oder
Soziologie ganz neue Einsichten zu vermitteln. In der Weiterentwicklung der Physik der dynamischen Systeme zur integrierten Systemdynamik sehen wir ein grosses Entwicklungspotential. Brachliegende Felder, die sich zwischen den Gärten der einzelnen wissenschatftlichen Disziplinen
ausdehnen, sollen mit dem Pflug der Systemdynamik zum Nutzen aller umgebrochen werden.
Das Modul Rotationsmechanik ist in zehn Kapitel gegliedert. Im ersten Pragraph wird der starre
Körper als physikalisches System aufgebaut. Zudem lernt der Leser das translatonsmechanische
Konzept mit dem Impuls als Primärmenge sowie das zugehörige Flüssigkeitsbild kennen. Das zweite
Kapitel ist ganz dem Drehimpuls gewidmet. Inhalt und Ströme werden erklärt und mit Hilfe der
Bilanz zum Grundgesetz der Drehmechanik zusammengefügt. Das dritte und vierte Kapitel beschäftigen sich mit der Energie als Begleitgrösse und dem Bahndrehimpuls als notwendige Ergänzung
zum Eigendrehimpuls. Das kapazitive, das induktive und das Widerstandsgesetz bilden den Kern des
fünften Kapitels. Dabei wird auch ein kleiner Einblick in die Sprache und Werkzeuge der Systemdynamik gewährt. Im sechsten Kapitel baue ich den Drehimpuls zu einer Vektorgrösse aus, ohne die
Kreiselmechanik voll zu entwickeln. Dies engt die Sicht auf die grundlegenden Gesetze nicht allzu
stark ein, denn für technische Vorgänge ist die freie Bewegung des starren Körpers unwichtig.
Zudem fehlt auf der Fachhochschulstufe die dazu notwendige Mathematik weitgehend. Die Mechanik des Rotators, die im siebten Kapitel dargelegt wird, behandelt den um eine feste Achse rotierenden Körper. Elementare Lehrbücher befassen sich oft nur mit diesem Fragment, einem Hybrid aus
Translations- und Rotationsbetrachtung. Damit lassen sich zwar einzelne Zusammenhänge der Drehmechanik schnell erklären, doch bleibt die eigentliche Begriffsbildung auf der Strecke. Das Energiestrombild, dem das achte Kapitel gewidmet ist, eignet sich zur Analyse komplexer Input-OutputSysteme wie Aufzüge, Skilifts, Getriebe oder Förderbänder. Obwohl sich die technische Mechanik
seit gut hundertfünfzig Jahren mit der Dynamik komplexer Geräte beschäftigt, ist meines Wissens
das hier verwendete Bild des Energieflusses noch in keinem Lehrbuch sytematisch aufgebaut und
verwendet worden.
Das neunte Kapitel nennt sich Statik. Doch statt mit Kräften und Drehmomenten, die auf ein freigeschnittenes Sytem einwirken, befasst es sich zuerst einmal mit dem Transport von Impuls und Drehimpuls in ruhenden Strukturen. Die Vorstellung, dass in jedem belasteten Element eines Bauwerkes
„Kraftströme“ fliessen, die eingeleitet, hindurchgeführt und schlussendlich wieder abgegeben werden müssen, ist sehr wahrscheinlich so alt wie die Baukunst selber. Leider erweist sich dieser Kraftfluss beim genaueren Hinschauen als ein Bündel von drei verschiedenen Impulsströmen, die erst
noch von drei Drehimpulstransporten begleitet werden. Die Bilder, die in diesem Kapitel gezeichnet
werden, basieren auf einem Satz Gleichungen, welcher die Drehimpulsströme lokal mit den Impulsströmen verknüpft. Obwohl diese mathematischen Verknüpfungen aus Gründen, die ich an dieser
Stelle nicht weiter erläutern möchte, nur für stationäre Massenverteilungen gültig sind, glaube ich an
ihren praktischen Nutzen. Die vollen Verknüpfungsgleichungen sind im Anhang aufgeführt und werden dort auch etwas eingehender erläutert.
Im letzte Kapitel werden rotierende Bezugssysteme abgehandelt. Dabei habe ich versucht, die Newtonsche Auffassung von Mechanik ein Stück weit mit dem Einsteinschen Weltbild zu versöhnen. Aus
nahliegenden Gründen musste ich auf die geometrische Verschmelzung von Raum und Zeit verzichten. Ich konnte also nur das Äquivalenzprinzip oder die Wandelbarkeit des Gravitationsfeldes aus der
Einsteinschen Allgemeinen Relativitätstheorie übernehmen. Diese Betrachtungsweise setzt voraus,
dass man den Faradayschen Feldbegriff schon vorher auf die Gravitaton übertragen hat. Unabhängig
davon, ob man beschleunigte Bezugssyteme behandeln will oder nicht, scheint mir der Begriff der
Gravitationsfeldstärke ein absolutes Muss zu sein. Falls die Wirkung der Gravitation nur kinematisch
definiert wird, besteht die Gefahr, dass die Studierenden begrifflich nie richtig zwischen einer
Seite 4
Rotationsmechanik
Beschleunigung und einer lokal vorhanden Wirkung unterscheiden lernen.
Das Flüssigkeitsbild, der schrittweise Aufbau des Drehimpulsspeichers, die konsequente Anwendung des Energiesatzes bei komplexen Input-Outpur-Systemen, die lokale Verknüpfung von Drehimpuls- und Impulsstrom sowie die Faraday-Einstein-Ergänzung der Mechanik des starren Körpers
sind Grund genug ein Buch zu darüber zu schreiben. Ich habe mich bemüht, ein Lehr- und nicht nur
ein Textbuch zu verfassen. Jedes Kapitel beginnt mit einer Einführung und endet mit einer Zusammenfassung. Zudem wird der Leser nach jedem Abschnitt aufgefordert, sein Wissen mit Hilfe von
Kontrollfragen zu überprüfen. Beispiele, Illustrationen und seitliche Überschriften sollen mithelfen,
das im Haupttext aufgebaute Lehrgebäude zu stabilisieren, die Begriffe und Definitionen zu festigen
und Zusammenhänge offenzulegen. Am Schluss des Buches wird eine Übersicht gegeben, sind alle
formalen Zusammenhänge nochmals aufgeführt, werden die Kontrollfragen beantwortet und wird
jede Aufgaben ausführlich kommentiert und vorgelöst.
Allen Kolleginnen und Kollegen, die mich in fachlichen Diskussionen auf Unstimmigkeiten aufmerksam gemacht, mit Bemerkungen und Änderungsvorschlägen beim korrigieren des Textes geholfen oder Beispiel geliefert haben, danke ich an dieser Stelle recht herzlich. Ein besonderer Dank geht
an meinen Kollegen und langjährigen Freund Hans Fuchs. Er hat mich nicht nur mit dem Karlsruher
Konzept vertraut gemacht, sondern mir mit interessanten Ideen und Präzisierungen geholfen,
Begriffe und Zusammenhänge besser zu verstehen. Danken will ich auch der Direktion des TWI, die
mir mit einer Stundenentlastung den nötigen Freiraum geschaffen hat.
Rotationsmechanik
Seite 5
1. Der Massenmittelpunkt
Einer der ältesten Zweige der Physik, die klassische oder Newtonsche Mechanik, befassst sich mit
der Bewegung von „Massenpunkten“ unter der Einwirkung von Kräften. Die Bewegung des punktförmigen Körpers kann berechenet werden, falls zu jedem Zeitpunkt alle Kräfte, sowie Anfangsgeschwindigkeit und -ort bekannt sind. Ausgedehnte Körper lassen sich nicht so einfach beschreiben.
Diese Objekte führen neben der Translationsbewegung meistens noch eine Rotation aus. Zudem
greifen die Kräfte an einer beliebigen Stelle an. Nun stellt sich die Frage, wie die Angriffsfläche der
Kraft, also die Durchtrittsstelle des Impulses, die beiden Bewegungsmöglichkeiten Translation und
Rotation beeinflusst. Geht bei einer Fadenspule, die von einer glatten Unterlage reibungsfrei gestützt
wird und auf die über den Faden ein Kraft einwirkt, die Drehbewegung auf Kosten der Translation,
oder sind beide Bewegungsvorgänge getrennt zu behandeln? Führt das Drehmoment, das den Körper
in Rotatation versetzt, zu einer Verminderung der Kraftwirkung oder sind Kraft und Drehmoment
zwei so verschiedene Dinge wie Äpfel und Birnen? Auf diese, für die Struktur der Mechanik zentrale
Frage gibt das nun folgende Kapitel eine umfassende Antwort. Es wird sich zeigen, dass die korrekte
Antwort einmal mehr nicht vom gesunden Menschenverstand gegeben werden kann.
Der Massenmittelpunkt, das Trägheitszentrum eines Systems, ist der Schlüsselbegriff, wenn es
darum geht, Rotations- und Translationsmechanik klar zu trennen. Nimmt man diese Trennung nicht
oder nur vage vor und sucht sich für einzelne Standardaufgaben eine schnelle Lösung, wird der
Zugang zu einem klaren Verständnis der Dynamik der starren Körper vorschnell verbaut. Dies rächt
sich spätestens dann, wenn der Ingenieur im konkreten Fall entscheiden muss, wie gross eine Lagerbelastung ist oder wie stark die nicht ausgewuchtete Welle gebogen wird. Bei praktischen Anwendungen zeigt es sich rasch, ob ein Ingenieur eine klare Vorstellung von der Struktur der Mechanik hat
oder ob er nur Rezepte anzuwenden weiss. Reines Formelwissen führt bei komplizierteren Aufgabenstellungen selten zum Ziel.
Der Massenmittelpunkt spielt in der Mechanik eine dreifache Rolle. Mit der ersten wollen wir uns in
diesem Kapitel hauptsächlich befassen: die Geschwindigkeit dieses Punktes legt zusammen mit der
Gesamtmasse den Impulsinhalt des Systems fest. Folglich ist die Summe über alle Kräfte gleich dem
Produkt aus der Masse und der Beschleunigung dieses Punktes. Gestützt auf die Physik des 20. Jahrhunderts könnte man den Sachverhalt auch umkehren: durch den Quotienten aus Impulsinhalt und
Masse wird eine spezielle Grösse, die wahre Geschwindigkeit eines komplexen Systems, definiert.
Die Geschwindigkeit des Massenmittelpunktes kann für jedes System, also zum Beispiel auch für
den schwimmenden Tintenfisch, berechnet werden. Doch nur beim starren Körper entspricht dieser
Wert der Geschwindigkeit eines ganz bestimmten Punktes. Damit kommen wir zur zweiten Funktion
des Massenmittelpunktes: wirken auf einen starren Körper verschiedene Kräfte ein, sind die damit
verbunden Drehmomente von der Lage des Massenmittelpunktes abhängig; die einzelnen Kräfte entfalten um diesen Punkte herum ihre Hebelwirkung. Mit dem Zusammenhang zwischen Kraft und
Drehmoment werden wir uns jedoch erst im nächsten Kapitel auseinandersetzen.
Im zweitletzten Abschnitt des vorliegenden Kapitels wird gezeigt, dass der statisch bestimmbare
Schwerpunkt mit dem Massenmittelpunkt identisch ist. Schwerpunkt und Massenmittelpunkt können und werden deshalb oft gleichgesetzt. Weil diese Identität jedoch nur im homogenen Gravitationsfeld gültig ist, halte ich die beiden Begriffe meistens auseinander. Den Schwerpunkt kürze ich mit
SP und den Massenmittelpunkt mit MMP ab. Der Massenmittelpunkt wird uns noch ein drittes Mal
beim Thema Bahndrehimpuls begegnen. Aus Konsistenzgründen ist der Bahndrehimpuls eines Teilkörpers immer auf den zugehörigen MMP zu beziehen.
Seite 6
Rotationsmechanik
Der letzte Abschnitt handelt von der statischen Unwucht. Ein Körper, der um eine feste Achse rotiert,
die nicht durch den eigenen Massenmittelpunkt verläuft, ändert andauernd seinen Impulsinhalt. Er
muss also über die Achse mit der Erde Impuls austauschen können. Die zugehörigen Ströme belasten
die Lager mit Kräften, die betragsmässig konstant sind und gleichzeitig die Rotationsbewegung mitmachen.
! Lernziele
Den Massenmittelpunkt eines Körpers berechnen können.
Wissen, dass die resultierende Kraft die Beschleunigung des Massenmittelpunkts bestimmt.
Die Bedeutung des Schwerpunktes kennen.
Eine statische Unwucht berechnen können.
1.1 Die Geschwindigkeit eines Systems
Luftkissenfahrzeuge sind
impulsisoliert
Fig. 1. - 1: Zwei Luftkissenfahrzeuge bilden ein schwingungsfähiges System.
Luftkissenfahrzeuge behalten dank ihrem dünnen Luftpolster die jeweilige Geschwindigkeit praktisch bei; das Luftkissen sorgt für eine gute
Impulsisolation. Nimmt man zwei solche Gleiter und hängt sie mit einer
Feder zusammen, entsteht ein schwingungsfähiges System, dessen totaler Inhalt an Bewegungsmenge sich im Laufe der Zeit nur wenig ändert.
500 g
250 g
identische Gleiter schwingen
gegeneinander
Werden die beiden Fahrzeuge nun kräftig gegeneinandergedrückt und
dann gleichzeitig losgelassen, schwingt jedes für sich hin und her. Die
Schwingungsdauer ist für beide Fahrzeuge gleich gross, d.h. sie bleiben
im Gegentakt. Identische Gleiter werden sich sogar spiegelbildlich zueinander bewegen. Ihre Geschwindigkeiten sind zu jedem Zeitpunkt
entgegengesetzt gleich gross und das Gesamtsystem wird weder nach
rechts noch nach links wegdriften.
auch ungleiche Gleiter können
an Ort schwingen
Im skizzierten Beispiel sind die die beiden Gleiter verschieden gross.
Ihre Bewegung verläuft deshalb nicht genau spiegelbildlich. Der kleine
Körper wird viel stärker geschüttelt als der grosse. Dieses Verhalten
lässt sich direkt aus der Impulserhaltung heraus erklären: weil beim
Start keine Bewegungsmenge zugeführt worden ist, speichern beide Teile zu jeder Zeit exakt entgegengesetzt gleichviel Impuls. Der leichtere
Körper weist deshalb während des ganzen Vorganges eine betragsmässig grössere Geschwindigkeit auf als sein schwerer Partner. Der zugehörige Quotient muss bis auf das Vorzeichen gleich gross sein wie das
reziproke Verhältnis der entsprechenden Massen. Trotz des ungleichen
Bewegungsverhaltens driftet das Gesamtsystem weder nach rechts noch
Rotationsmechanik
Seite 7
nach links; im zeitlichen Mittel stehen beide Körper still.
Versetzt man einem Zweigleitersystem, dessen linkes Luftkissenfahr- der Impuls pendelt zwischen
zeug doppelt so träge ist wie das rechte, von links her einen Schlag, be- den Systemen hin und her
wegt es sich schwingend in Schlagrichtung fort. Der anfänglich im
linken Körper lokalisierte Impuls fliesst mit zunehmender Stärke durch
die sich verformende Feder in den andern Partner über. Sobald beide
Fahrzeuge die gleiche Geschwindigkeit erreicht haben, pumpt die sich
wieder entspannende Feder mit abnehmender Rate nochmals die gleiche
Portion Bewegungsmenge ins leichtere Fahrzeug hinein. Ist der Impulsstrom versiegt, beginnt sich die Feder infolge der unterschiedlichen
Fahrzeuggeschwindigkeiten zu dehnen und der Impuls fliesst durch die
Feder zurück, bis er wieder vollständig im linken Fahrzeug lokalisiert
ist.
Das Flüssigkeitsbild stellt mechanische Prozesse als Strömungsvorgän- das Flüssigkeitsbild offenbart
ge im Gravitationsfeld dar. In diesem Bild werden die eindimensionalen die innere Dynamik
Bewegungen mit Hilfe von Reservoirs und Pipelines dargestellt. Dabei
verwandelt sich der Impuls in eine Flüssigkeit, ein einzelner Körper
wird zu einem Behälter und die träge Masse transformiert sich in die zugehörige Grundfläche. Die Geschwindigkeit geht in die entsprechende
Füllhöhe über.
Fig. 1. - 2: Das Flüssigkeitsbild
eines
Zweimassenschwingers. Im ersten Teilbild steht das leichtere Objekt gerade still, im zweiten
sind beide gleich schnell und
in der dritten Darstellung
hat der leichtere Körper die
Maximalgeschwindigkeit erreicht.
Bewegungsvorgänge lassen sich nach der Transformation ins Flüssig- die mittlere Geschwindigkeit
keitsbild eindeutig besser analysieren. Sowohl die Maximalgeschwin- des Zweimassenschwingers
digkeit des leichten Gleiters als auch die Minimalgeschwindigkeit des
grösseren können direkt aus dem Bild herausgelesen werden. Das Flüssigkeitsbild offenbart uns zudem eine durch blosse Beobachtung kaum
wahrzunehmende Symmetrie: die beiden Geschwindigkeiten der Teilsysteme oszillieren um einen festen Wert herum. Dieser Wert ist gleich
dem gesamten Impulsinhalt dividiert durch die totale Masse des Systems. Beide Körper des Schwingers bewegen sich im zeitlichen Mittel
mit dieser Geschwindigkeit fort.
Beispiel 1:
Ein Luftkissenfahrzeug (Masse 500 g), das über eine ideale Feder (Richtgrösse 600 N/m) mit einem halb
so schweren verbunden ist, wird durch einen harten Stoss in Bewegung versetzt. Das trägere System
beginnt daraufhin mit einer Anfangsgeschwindigkeit von 3 m/s die Feder zu deformieren.
Wie stark wird die Feder zusammengedrückt?
Welche Geschwindigkeit wird das leichtere Fahrzeug erreichen können?
Seite 8
Lösung 1:
Rotationsmechanik
Anfänglich enthält das erste Fahrzeug 1.5 Ns Impuls. Diese Bewegungsmenge fliesst über die Feder an den
zweiten Körper weg, bis beide gemeinsam mit 2m/s über die Bahn gleiten. Bis zu diesem Zeitpunkt sind
0.5 Ns Impuls im Mittel 1.5 m/s hinuntergeflossen, was eine freigesetzte Energie von 0.75 J ergibt. Diese
Energie ist in der Feder gespeichert worden und hat diese um 5 cm gestaucht.
Indem sich die Feder entspannt, pumpt sie nochmals 0.5 Ns Impuls vom grossen ins kleine Fahrzeug, das
damit seine Geschwindigkeit auf 4 m/s verdoppelt.
Federketten
Werden mehrere Luftkissenfahrzeuge zu einer ganzen Kette zusammengebaut, kann sich der Impuls über viele Einzelsysteme verteilen. Stösst
man zum Beispiel das hinterste Fahrzeug der Kette an, fliesst der Impuls
wellenartig durch das ganze System hindurch, bis er beim vordersten
Körper angelangt ist. Dann strömt er zurück und verteilt sich immer
mehr über die ganze Kette, wobei sich deren einzelne Glieder zunehmend chaotischer verhalten. Überlagert wird der ganze Bewegungsablauf von einer einfachen Verschiebung der Kette als Ganzes nach rechts.
Wieder ist die zugehörige Geschwindigkeit gleich dem Wert des Gesamtimpulses dividiert durch die totale Masse. Die Federkette bewegt
sich also im Mittel gleich schnell wie ein starrer Vergleichskörper mit
gleicher Masse und mit gleichem Impulsinhalt. Den zugehörigen Wert
nennt man Massenmittelpunkts- oder Schwerpunktsgeschwindigkeit.
Woher der Name kommt, erfahren Sie weiter unten.
der Impuls als vektorwertige
Grösse
Fällt die Einschränkung, wonach sich Körper nur längs einer Geraden
bewegen dürfen, weg, können bis zu drei verschiedene Sorten Impuls
am Geschehen beteiligt sein. Diese drei Sorten, die getrennt zu bilanzieren sind, transformieren sich bei einer Drehung des Koordinatensystems
wie ein Vektor. Weil die vektorielle, komponentenunabhängige Schreibweise für isolierte Systeme mathematisch besser zu handhaben ist als
die dreifach skalare, verzichte ich hier auf die kontinuumsgerechtere
Darstellung und behandle den Impulsinhalt als vektorwertige Grösse.
Massenmittelpunktsgeschwindigkeit
Die Einzelteile eines beliebigen Systems speichern zu jedem Zeitpunkt
eine bestimmte Impulsmenge. Addiert man alle Inhalte und dividiert das
Ergebnis durch die Gesamtmasse, erhält man in Erweiterung der eindimensionalen Betrachtungsweise die Massenmittelpunktsgeschwindigkeit als vektorielle Grösse
r
r
vMMP
∑m ⋅v
=
∑m
i
i
i
(1.1)
i
i
die natürliche Zerlegeung des
Impulsinhaltes
Der Impulsinhalt des einzelnen Teilkörpers kann mit Hilfe von Formel
(1.1) in zwei Teile zerlegt werden. Der erste beschreibt den Anteil, den
er speichern würde, wenn alle Teile die gleiche Geschwindigkeit besässen. Der zweite steht für den Teil des Inhaltes, der die Relativbewegung
ausmacht
r
r
r
pi = mi ⋅ vMMP + mi ⋅ vrel
(1.2)
Rotationsmechanik
Seite 9
Die Massenmittelpunktsgeschwindigkeit charakterisiert den Bewegungszustand des Gesamtsystems. Sie gibt die Ortsveränderung an, die
ein starrer Vergleichskörper mit gleicher Masse und gleichem Gesamtimpuls machen würde. Die Massenmittelpunktsgeschwindigkeit ist eine
rein rechnerische Grösse. Es kann also passieren, dass sich kein einziger
Teilkörper eines Systems je mit dieser Geschwindigkeit fortbewegt. Vergegenwärtigen wir uns den Sinn von Formel (1.2) im Flüssigkeitsbild.
Der Impulsinhalt der einzelnen Glieder einer Gleiterkette darf in einen
allgemeinen (bis zur inelastischen Linie) und in einen relativen Anteil
(Abweichung von der inelastischen Linie) zerlegt werden.
Fig. 1. - 3: Der Impulsinhalt
einer Federkette darf in
einen Massenmittelpunktsund in einen Relativanteil
zerlegt werden.
Tauscht der Gesamtkörper Impuls mit der Umgebung aus, greifen also Kräfte bestimmen die
Kräfte an, darf die Zerlegung in Kollektiv- und Relativanteil weiterhin- Beschleunigung des Massenbeibehalten werden. Da die Summe über alle Relativanteile definitions- mittelpunktes
gemäss verschwindet, legen die Kräfte die Änderungsrate der Gesamtgeschwindigkeit, die sogenannte Massenmittelpunktsbeschleunigung,
eindeutig fest. Wie und über welche Oberflächenteile der Impuls ins System hineinfliesst, spielt dabei keine Rolle; die Beschleunigung des
Massenmittelpunktes ist nur von der Kräftesumme abhängig.
r r
r
F
(1.3)
∑ i = p« = m ⋅ v«MMP
i
? Kontrollfragen
1.)
2.)
3.)
4.)
5.)
Zwei gleich grosse Luftkissenfahrzeuge prallen mit entgegengesetzt gleichen Geschwindigkeiten aufeinander und bleiben dann aneinander kleben. Was passiert bei diesem Stoss mit dem
Impulsinhalt der beiden Fahrzeug?
Wie heisst die Grösse, die entsteht, wenn man den Gesamtimpuls eines Systems durch dessen
Masse dividiert
Wieso bleibt bei einem Mückenschwarm die Geschwindigkeit des Massenmittelpunktes nicht
unbedingt konstant?
Welche kinematische Wirkung entfaltet die resultierende Kraft bei einem beliebigen System?
Zwei identische Metallzylinder stehen auf einem horizontal ausgerichteten, ebenen Tisch.
Durch viele kleine Düsen wird Luft aus dem Innern des Tisches nach oben geblasen. Dank diesem Dauerwind werden die beiden Metallzylinder leicht angehoben und die Reibung zwischen
den Körpern und der Unterlage wird vernachlässigbar klein. Nun wirken auf beide Körper
zwei gleich gross Kräfte ein. Die eine Kraft greift an einer Schnur an, die auf dem Zylinder
aufgewickelt ist. Beim andern Zylinder ist die Schnur so befestigt, dass die Wirklinie der Kraft
durch dessen Achse verläuft. Der Zylinder mit der aufgewickelten Schnur wird also im Gegensatz zum zweiten Körper noch zusätzlich in Rotation versetzt. Was lässt sich über die Bewegung der beiden Zylinderachsen aussagen?
Seite 10
Rotationsmechanik
1.2 Der starre Körper
die Geschwindigkeit eines
Punktes des starren Körpers
Die Massenmittelpunktgeschwindigkeit beschreibt nur den jeweiligen
Impulsinhalt eines Systems. Lokalisieren, das heisst einem festen Punkt
zuordnen, lässt sich diese Grösse im allgemeinen nicht. So bleibt zum
Beispiel das Trägheitszentrum eines Zweikörpersystems ortsfest, wenn
sich dessen massengleiche Bestandteile mit entgegengesetzt gleichen
Geschwindigkeiten voneinander wegbewegen. Einzig beim sogenannt
starren Körper gibt es einen materiellen Punkt, der sich andauernd mit
der Massenmittelpunktsgeschwindikgeit fortbewegt. Um denselben zu
finden, bedienen wir uns einer Formel aus der geometrischen Bewegungslehre, der Kinematik: die Geschwindigkeit eines beliebigen Punktes auf einem starren Körper kann durch die Winkelgeschwindigkeit und
durch den Abstand von der momentanen Drehachse beschrieben werden
r r r
v =ω ×r
(1.4)
die momentane Drehachse
Die momentane Drehachse enthält alle Punkte, die sich im fraglichen
Zeitpunkt nicht bewegen. Findet man keine stillstehende Punkte auf
dem Körper, liegt die Drehachse ausserhalb des Objektes. Die momentane Drehachse darf als rein geometrische Grösse also auch immateriell
sein und in der Umgebung des rotierenden Gebildes liegen. Zudem
muss sie weder bezüglich des Körpers noch des Raumes ruhen. Ein einfaches Beispiel dazu liefern die Rollkörpern. Bei allen Walzen und Rädern, die auf einer ruhenden Unterlage abrollen, geht die momentane
Drehachse durch die Berührpunkte hindurch. Im Laufe der Abrollbewegung überstreicht die momentane Drehachse die ganze Lauffläche des
rotierenden Körpers. Zudem wandert sie zusammen mit dem abrollenden System längs der Unterlage fort. Wird eine rotierende Walze ohne
Translation sanft auf eine Unterlage abgesetzt, wandert die momentane
Drehachse als Folge der einsetzenden Wechselwirkung vom Symmetriezentrum des rotierenden Körpers immer mehr gegen die Berührlinie
weg. Diese Linie wird erreicht, sobald die Walze rutschfrei abrollt. Die
momentane Drehachse ist also eine rein kinematische Grösse, die nichts
mit der Dynamik des Systems zu tun hat und zudem noch vom Bewegungszustand des Beobachters abhängt
momentane Drehachse
Der Massenmittelpunkt
Zerlegt man nun einen starren Körper in kleine Bestandteile und berechnet dann seine Massenmittelpunktsgeschwindigkeit nach Formel (1.1),
so lässt sich ein Ortsvektor ausklammern, der die Lage eines Punktes
beschreibt
r r
r r
r
1
vMMP = ⋅ ∑ mi ⋅ (ω × ri ) = ω × rMMP
m i
r
r
1
rMMP = ⋅ ∑ mi ⋅ ri
m i
(1.5)
Der fragliche Punkt, dessen Geschwindigkeit unabhängig von allen Einwirkungen immer gleich dem Gesamtimpuls dividiert durch die totale
Masse ist, liegt also im Zentrum der Massenverteilung. Er behält seine
Rotationsmechanik
Seite 11
Lage bezüglich des Körpers bei, solange dieser starr bleibt. Weil sich
der Massenmittelpunkt eines starren Körper immer mit der in Formel
(1.1) berechneten Geschwindigkeit bewegt, umschreibt man diese mit
dem etwas umständlich klingenden Namen Massenmittelpunktsgeschwindigkeit.
Beispiel 2:
Drei identische Kugeln bilden ein rechtwinkliges Dreieck mit den Katheten 5 m und 12 m. Wo liegt der
Massenmittelpunkt des Systems?
Lösung 2:
Wir legen das Koordinatensystem in den rechten Winkel hinein und wenden (5) komponentenweise an.
Mit dieser Wahl reduziert sich die jeweilige Summe auf einen einzigen Term.
Nach der Division mit der Gesamtmasse erhalten wir für die beiden Komponenten des MMP-Ortsvektors
je einen Ausdruck, der gleich einem Drittel der entsprechenden Kathete ist. Die Koordinaten des MMP
haben folglich die Werte 4 cm und 1.67 cm.
Beispiel 3:
Drei gerade Drahtstücke (5 cm, 12 cm und 13 cm) werden zu einem ebenen, rechtwinkligen Dreieck
zusammengelötet. Wo liegt der Massenmittelpunkt dieses Drahtbügels?
Lösung 3:
Aus der Linearität in Formel (5) folgt, dass die verschiedenen Teile eines Systems zu einem Objekt zusammengefasst und als einzelner Punkt behandelt werden dürfen. Wir ziehen deshalb in Gedanken die Massen
der drei Drähte zu deren geometrischen Symmetriezentren zusammen. Der Ursprung des Koordinatensystems wird mit Vorteil wieder in die rechtwinklige Ecke des Dreiecks gelegt.
Weil die Drahtmitten nicht in den Eckpunkten des Dreiecks liegen, gehen diesmal pro Koordinatenrichtung zwei Terme in die Summe ein. Die Auswertung von Formel (5) liefert für den MMP die Koordinaten
5 cm und 1.5 cm
Fassen wir die Kernaussage zur Bewegung eines starren Körpers noch- Zerlegung in Translation und
mals zusammen. Bei jedem nichtdeformierbaren Körper existiert genau Rotation
ein Punkt, dessen Geschwindigkeit zu jedem Zeitpunkt gleich dem Quotienten aus Impulsinhalt und Gesamtmasse ist. Die Raumkoordinaten
dieses mit MMP bezeichneten Punktes können mit Hilfe von (1.5) berechnet werden. Die rein kinematische Zerlegung der Bewegung eines
starren Körpers in eine Translation eines beliebigen Punktes und in eine
Rotation um eine Achse, die durch diesen Punkt geht, wird dynamisch
einfacher, wenn man den MMP als Bezugspunkt wählt. Translationsmechanisch gesehen darf also jeder Körper auf seinen eigenen MMP reduziert werden. Dann legt die Summe über alle einwirkenden Kräfte die
Beschleunigung dieses Punktes eindeutig fest. Falls das Bewegungsverhalten eines freien, starren Körpern durch die Translation des MMP und
durch die Rotation um eine Achse, die durch den MMP geht, beschrieben wird, nehmen die Bewegungsgleichungen die einfachste Form an.
Der Massenmittelpunkt eines starren Körpers, der gesamthaft keinen die Drehachse eines impulsImpuls enthält, wird sich nicht bewegen. Der Körper bleibt an Ort und freien Körpers darf torkeln
die momentane Drehachse verläuft in jedem Moment durch den Massenmittelpunkt. Trotzdem rotiert der impulsfreie Körper nicht unbedingt
um eine raumfeste Achse. Die Drehachse darf selber noch eine Torkelbewegung ausführen. Eine herumwirbelnde Drehachse ist also mit der
Impulserhaltung durchaus verträglich. Die Torkelbewegungen der Dreh-
Seite 12
Rotationsmechanik
achse heisst allgemein Nutation. Ein Körper nutiert, sobald die Drehachs nicht mit einer Symmetrieachse des Körpers zusammenfällt. Die
Nutation eines starren Körpers lässt sich mit Hilfe der Vektoreigenschat
des Drehimpulses erklären.
? Kontrollfragen
6.)
Ein Körper rotiere um eine Achse, die den Massenmittelpunkt enthält. Was kann über seinen
Impulsinhalt ausgesagt werden?
7.)
Eine Vollkugel (Masse 500 g, Radius 2 cm) rollt über einen horizontalen Tisch. Dabei dreht
sie sich ein Mal pro Sekunde. Wieviel Impuls speichert sie?
8.)
Ein Auto rollt unkontrolliert eine Strasse hinunter und kommt dann an einer Hausmauer zum
Stillstand. Aus Formel (1.3) folgt, dass die Summe über alle Kräfte gleich gross ist wie die
Aenderungsrate der mit Hilfe von (1.1) berechneten Geschwindigkeit. Welcher Teil des Autos
erfährt beim Aufprall genau diese Beschleunigung?
9.)
Die einzelnen Vektorkomponenten in Formel (1.5) beschreiben ein gewichtetes arithmetisches
Mittel. Über welche Grösse wird gemittelt? Wie heissen die „Gewichtsfaktoren“?
10.) Wie nennt man die Torkelbewegung eines freien, starren Körpers?
1.3 Der Schwerpunkt
Schwerelinien und Schwerpunkt
Zeichnet man bei einer beliebig geformten Kartonscheibe, die an einem
Punkt frei drehbar gelagert ist, mit Hilfe eines Senkbleis eine Gerade
ein, so hat man eine sogenannte Schwerelinie konstruiert. Wiederholt
man das Verfahren, indem man von verschiedenen Drehpunkten aus die
Schwerelinien fällt, macht man eine interessante Entdeckung: alle möglichen Schwerelinien schneiden sich in einem festen Punkt. Die Kartonscheibe besitzt offensichtlich einen ausgezeichneten Ort, Schwerpunkt
genannt, der genau unterhalb des Drehpunktes liegen muss, damit
Gleichgewicht herrscht. Am einfachsten präsentiert sich die Situation
bei einem dreieckförmigen Kartonstück. Bei diesem Objekt fallen die
Schwerelinien mit den Seitenhalbierenden zusammen. Der Schwerpunkt
ist also identisch mit dem Schnittpunkt der drei Seitenhalbierenden.
Eine analoge Aussage kann zu beliebig geformten Körpern gemacht
werden. Leider lassen sich bei echt dreidimensionalen Objekten die
Schwerelinien nicht so schön einzeichnen wie bei flachen Kartonstükken. Trotzdem kann man die Lage des Schwerpunktes in etwa erraten.
Dazu hängt man ein ausgewähltes Objekt an einem langen Faden auf
und wartet, bis die Pendelbewegung zum Stillstand gekommen ist. Die
Verlängerung des Fadens läuft dann genau durch den Schwerpunkt des
Körpers hindurch. Damit das Gravitationszentrum empirisch gefunden
werden kann, muss das Objekt aber an mindestens drei verschiedenen
Punkten aufgehängt werden.
Rotationsmechanik
Seite 13
D
Fig. 1. - 4: Bei einem Kartondreieck
fallen
der
Schwer- unt der Schnittpunkt der Seitenhalbierenden zusammen. Hängt man
das Dreieck in einer Ecke frei
drehbar auf, so pendelt sich
die eine Seitenhalbierende
genau vertikale ein.
D
Der empirisch im Gravitationsfeld bestimmte Schwerpunkt ist mit dem Schwerpunkt und Massenmitoben eingeführten Massenmittelpunkt identisch. Zum Beweis zerlegen telpunkt fallen zusammen
wird die frei drehbar gelagerte Kartonscheibe in kleine Stücke und wenden das Hebelgesetz von Archimedes (285 - 212 v. Chr.) an. Das Gesetzt
besagt, dass bei einem zweiseitig belasteten Hebel das Produkt aus angreifender Kraft und Abstand der zugehörigen Wirklinie von der Drehachse für beide Arme gleich gross sein muss, damit Gleichgewicht
x
herrscht. Die Hebelwirkung der Gewichtskräfte aller Kartonstücke, die
mi
links von der Schwerelinie liegen, muss somit gleich der totalen Hebelwirkung aller sich auf der rechten Seite befindenden Kartonteile sein.
Legt man nun den Ursprung des Koordinatensystems auf die Drehachse
und richtet die x-Achse horizontal aus, wird der Ausdruck für die Archimedische Forderung recht kompakt
∑F
Gi
i
⋅ xi = g ⋅ ∑ mi ⋅ xi = 0
(1.6)
i
z
Die Formel (1.6) entspricht bei gleicher Koordinatenwahl der einen
Komponente von (1.5). Der Massenmittelpunkt liegt also im Schnittpunkt der Schwerelinien und ist somit identisch mit dem Schwerpunkt.
Infolge dieser Identität darf bei einem starren Körper der volumenmässige Impulsaustausch von System und Gravitationsfeld, die sogenannte
Gewichtskraft, durch einen einzigen Pfeil dargestellt werden, der im
Schwerpunkt angreift. Streng genommen existiert der Begriff Schwerpunkt nur bei homogenen Gravitationsfeldern. Ein ausgedehntes Objekt,
das sich in einem inhomogenen Gravitationsfeld befindet, erleidet eine
komplexere Wirkung. Die Gravitationskraft kann dann nicht mehr nur
mit einem Kraftpfeil dargestellt werden, welcher im MMP angreift. Als
Beispiel sei hier die Erde erwähnt. Sie erfährt im Gravitationsfeld der
Sonne neben der Gewichtskraft noch ein zusätzliches Drehmoment.
Diese Einwirkung zwingt der Erdachse eine sogenannte Präzessionsbewegung auf. Bei diesem Vorgang überstreicht die Erdachse in etwa
26’000 Jahren den Mantel eines Kreiskegels.
Seite 14
Rotationsmechanik
? Kontrollfragen
11.)
12.)
13.)
Die Gewichtskraft greift im Schwerpunkt an. Wie ist diese Aussage zu interpretieren?
Fallen Schwerpunkt und Massenmittelpunkt eines Körpers immer zusammen?
Die Schwerkraft der Sonne greift nicht im MMP der Erde an. Was meint man damit? Wie reagiert die Erde darauf?
1.4 Die statische Unwucht
Unwucht beim Drehen
Eine grosser Vollzylinder aus Stahl soll am Umfang abgedreht werden.
Dazu spannt man ihn auf einer Karusselldrehbank (einer Drehbank mit
vertikaler Achse) ein. Der Körper gilt als statisch ausgewuchtet, wenn
die Symmetrieachse des Zylinders mit der Mittellinie der Arbeitsspindel
zusammenfällt. Bei einem ausgewuchteten Werkstück darf die Drehzahl
der Spindel beliebig hinaufgefahren werden, ohne dass deren Lager einer zusätzlichen Belastung ausgesetzt sind. Fällt die Zylindermitte jedoch nicht mit der Symmetrieachse der Arbeitsspindel zusammen,
werden deren Lager umso stärker belastet, je schneller sich der Stahlzylinder dreht. Diese sogenannt statische Unwucht gilt es nun zu erklären.
die statische Unwucht löst
Impulsströme aus
Der Impulsinhalt eines Systems kann immer als Produkt aus der Gesamtmasse und der Geschwindigkeit des Massenmittelpunktes geschrieben werden. Liegt das Trägheitszentrum eines zu bearbeitenden Werkstückes genau auf der Mittelachse der Arbeitsspindel, erleidet es unabhängig vom Rotationszustand nie eine Beschleunigung und der Impulsinhalt des ganzen Körpers bleibt konstant gleich Null. Ist das Werkstück
beim Einspannen jedoch nicht ausgewuchtet worden, bewegt sich dessen Massenmitte auf der sich drehenden Aufspannfläche entlang einer
Kreisbahn. Damit ändert der Körper seinen Impulsinhalt in einer für
Kreisbewegungen typischen Art und der zugehörige Impulsstrom, der
zwischen Werkstück und Erde hin- und herfliesst, belastet die Lager mit
einer umlaufenden Kraft.
jede Kreisbewegung wird
durch eine resultierende Zentralkraft verursacht
Ein ausgedehntes Objekt darf, solange man nur dessen Translationsbewegung untersuchen will, durch einen Punkt mit gleicher Masse ersetzt
werden. Dieser Massenpunkt vollführt dann gemäss Formel (1.3) die
gleiche Bewegung wie der Massenmittelpunkt des ursprünglichen Systems. Interessanterweise hat weder die Drehbewegung noch der Ort des
Impulsaustausches, d.h. die Angriffspunkte der Kräfte, einen Einfluss
auf das Bewegungsverhalten des Massenmittelpunktes. Der nicht ausgewuchtete Körper erleidet also die gleichen Kräfte wie ein massiver
Punkt, der auf der Bahn des MMP umläuft. Weil ein Punkt auf einer
Kreisbahn eine Zentralbeschleunigung aufweist, deren Betrag gleich
dem Quadrat der Geschwindigkeit dividiert durch den Radius der Kreisbahn ist, ändert sich der Impulsinhalt des zugehörigen Körpers mit der
entsprechenden Rate. Diese Rate kann als Kreuzprodukt von Winkelgeschwindigkeit und Momentanwert des Impulsinhaltes geschrieben werden kann. Der zugehörige Vektorpfeil, die resultierende Kraft, zeigt also
immer gegen das Kreiszentrum.
Rotationsmechanik
Seite 15
Im Hinblick auf die noch zu diskutierende dynamische Unwucht soll Impulsströme bei der Kreisbehier die Lagerbelastung nochmals analysiert werden. Dazu spalten wir wegung
die vektorwertige Grösse Impuls bezüglich eines raumfesten Koordinatensytems in drei skalare Mengen auf. Kreist nun ein kleiner Körper in
der x-y-Ebene mit konstanter Schnelligkeit (Geschwindigkeitsbetrag)
um einen vorgegebenen Punkt, verändert sich sowohl sein x- als auch
y
v
sein y-Impulsinhalt harmonisch in der Zeit. Da die beiden Bewegungsmengen nicht einfach verschwinden und entstehen, muss der Impuls
m
über irgendwelche Pfade mit der Erde ausgetauscht werden. Häufig
dient ein Seil als Impulsstromleiter. Zur weiteren Analyse betrachten wir
ω·t
x
einen reibungsfrei gelagerten Zylinder, der an einem Seil festgebunden
um einem Pflock kreist. Beschreibt man den Impuls des Zylinders komponentenweise und differenziert dann die beiden skalaren Grössen nach
der Zeit, ergeben sich die zugehörigen Änderungsraten. Aus der Impulsbilanz folgt, dass diese Raten gleich gross sein müssen, wie die Stärken
der im Seil drin fliessenden Impulsströme
I px d px d − m ⋅ ω ⋅ r ⋅ sin(ω ⋅ t )
− cos(ω ⋅ t )
2
= m ⋅ω ⋅ r ⋅
I = p =
− sin(ω ⋅ t )
py dt y dt m ⋅ ω ⋅ r ⋅ cos(ω ⋅ t )
(1.7)
Die beiden Impulsstromstärken heissen, falls man sie auf ein ausgewähltes System bezieht, Komponenten einer Kraft. Wie aus Formel
(1.7) zu entnehmen ist, zeigt die Kraft gegen das Kreiszentrum und der
zugehörige Betrag ist gleich dem Produkt aus Impulsinhalt und Winkelgeschwindigkeit. Als Folge der rechtwinkligen Anordnung von Impuls
und zugehöriger Änderungsrate verschwindet das Skalarprodukt aus
Seilkraft und Geschwindigkeit der Angriffsfläche. Die Leistung der
Seilkraft ist also gleich Null, d.h. der über das Seil fliessende Impulsstrom transportiert netto keine Energie.
Wird der kreisende Zylinder durch eine Hantel, die aus zwei Kugeln und
einem Verbindungsstab besteht, ersetzt, erhält man das einfachste Modell für einen starren Körper. Sobald sich die Hantel um ihren eigenen
Massenmittelpunkt dreht, tauschen die beiden Kugeln über den Verbindungsstab Impuls miteinander aus. Im Gegensatz zum kreisenden Zylinder fliesst dabei keine Bewegungsmenge an die Erde weg oder von
dieser zu, d.h es werden keine Lager belastet und der Körper gilt als statisch ausgewuchtet. Eine Hantel kann jedoch auch noch eine Unwucht
erzeugen, wenn ihr MMP mechanisch festgehalten wird. Dazu muss sie
nur schief zur Drehachse aufgespannt werden. Die Unwucht, die von
den im Verbindungsstab quer zur eigenen Definitionsrichtung fliessenden Impulsströmen erzeugt wird, heisst dynamisch. Eine saubere Analyse der dynamischen Unwucht ist erst möglich, wenn man die Vektoreigenschaft des Drehimpulses kennt. Dies wird frühestens im Kapitel 6
der Fall sein.
x
Ipx
z
Seite 16
Rotationsmechanik
? Kontrollfragen
14.)
15.)
16.)
17.)
Wann heisst ein Körper statisch ausgewuchtet?
Was passiert bei einer statischen Unwucht?
Wie hängt bei einer Kreisbewegung die Zentralkraft mit dem Impulsbetrag zusammen?
Wie ensteht eine dynamische Unwucht?
Zusammenfassung von Kapitel 1
Ein Körper speichert Impuls, sobald es sich durch den Raum hindurch bewegt. Bildet man den Quotienten aus dem Impulsinhalt und der Masse eines Systems, erhält man eine charakterisitische
Geschwindigkeit. Diese Grösse entspricht beim starren Körper exakt der Geschwindigkeit eines ausgezeichneten Punktes, des sogenannten Massenmittelpunktes (MMP).
Setzt man die Definition des Massenmittelpunktes in die Impulsbilanz ein, erhält man das Grundgesetz der Translationsmechanik für starre Körper. Das Gesetz besagt, dass die Summe über alle Kräfte
gleich dem Produkt aus Masse und Beschleunigung des Massenmittelpunktes ist. Dabei spielt der
Angriffspunkt der Kraft, die Stelle, an welcher der Impulsstrom über die Systemgrenze fliesst, keine
Rolle.
Die Wirkung, die das Gravitationsfeldes auf einen starren Körper ausübt, darf durch eine Einzelkraft
ersetzt werden, die im Schwerpunkt (SP) angreift. Die Grösse der Schwerkraft ist gleich Masse mal
Gravitationsfeldstärke. Im homogenen Gravitationsfeld sind Schwerpunkt und Massenmittelpunkt
identisch.
Einen starren Körper, der um eine feste Achse rotiert und dessen Massenmittelpunkt auf der Achse
selber liegt, nennt man statisch ausgewuchtet. Folglich bewegt sich bei einer statischen Unwucht der
MMP auf einer Kreisbahn um die Achse. Der Körper tauscht dann andauernd Impuls mit der Erde
aus und belastet dabei die Lager mit einer umlaufenden Kraft.
!? Lernzielkontrolle
Den Massenmittelpunkt eines Körpers berechnen können.
1.)
2.)
3.)
Sie besitzen die Werkstattzeichnung eines Gegenstandes, der nur aus geraden Drahtstücken
besteht. Wie bestimmen Sie den Massenmittelpunkt dieses Gegenstandes? Wie gehen Sie vor?
Von einem ebenen, mehreckigen Blechstück liegt eine präzise Zeichnung vor. Wie bestimmen
Sie nun den Massenmittelpunkt.
Wo liegt der Schwerpunkt einer Pyramide?
Wissen, dass die resultierende Kraft die Beschleunigung des Massenmittelpunkts bestimmt.
4.)
5.)
Gilt die Aussage, wonach die resultierende Kraft die Beschleunigung des Massenmittelpunktes verursacht, auch für deformierbare Körper?
Zwei gleich grosse und gleich schwere Metallzylinder stehen auf einem ebenen Tisch und
werden je von einem Luftkissen in der Schwebe gehalten. Nun zieht man an beiden Körper mit
der gleichen Kraft. Beim ersten Zylinder greift die Kraft an einer Schnur an, die wie bei einer
Fadenspule aufgewickelt ist. Beim zweiten geht die Wirklinie der Kraft direkt durch die Zylin-
Rotationsmechanik
6.)
7.)
Seite 17
derachse. Wie verhalten sich die Beschleunigungen der beiden Zylinderachsen zueinander?
Auf einer Spule sind zwei dünne und weiche Fäden gleichsinnig aufgewikkelt. Die beiden losen Enden der Faden werden nun parallel ausgerichtet an
einem horizontal befestigten Stab angebunden. Dann wird die Spule unter
die Befestigungsstelle gebracht und losgelassen. Wie pendelt sich die Spulenachse ein? Versucht sie sich genau lotrecht zum Stab auszurichten?
Formulieren Sie das Grundgesetz der Translationsmechanik für einen starren Körper. Versuchen Sie, eine möglichst präzise und allgemeingültige Fassung zu finden!
Die Bedeutung des Schwerpunktes kennen.
8.)
9.)
Die Gewichtskraft greift im Schwerpunkt eines Körpers an. Was sagen Sie zu dieser Aussage?
Eine Holzkiste steht auf einem starken Brett. Nun wird das Brett an einem Ende langsam
hochgehoben. Wann kippt der Körper um?
10.) Ein beliebiges, starres Objekt wird an einem Seil aufgehängt. Wie wird es sich einpendeln?
11.) Wie funtioniert ein Stehaufmännchen (eine Halbkugel mit aufgesetztem Oberkörper)?
12.) Würde sich der Mond der Erde zu stark nähern, so würden ihn die Gezeitenkräfte auseinanderreissen. Würde dann der Massenmittelpunkt der Trümmer auf der alten Mondbahn weiterfliegen?
Eine statische Unwucht berechnen können.
13.)
14.)
15.)
16.)
17.)
Wann ist ein Körper statisch nicht ausgewuchtet?
Wie kann man feststellen, ob ein Körper statisch ausgewuchtet ist?
Was passiert, wenn ein solcher Körper um seine feste Achse zu rotieren anfängt?
Wie werden die Lager belastet?
Wie gross ist die durch die Unwucht induzierte Lagerkraft? Geben Sie eine Formel an.
A Übungsaufgaben
1.)
Zwei gerade Drahtstücke (Länge 10 cm und 5 cm) sind rechtwinklig zu einem L
zusammengelötet worden. Welchen Winkel schliesst das längere Stück mit der
Vertikalen ein, wenn der Drahtkörper frei Drehbar im Punkt P aufgehängt wird?
P
?
2.)
Ein rundes Blechstück (Durchmesser 10 cm) weist ein exzentrisches Loch
(Durchmesser 4 cm) auf. Die Mittelachse der Scheibe fällt gerade mit einer
Mantellinie des Loches zusammen. Wo liegt der Massenmittelpunkt der gelochten Scheibe?
3.)
Vier kleine, gleich schwere Kugeln sind nach den Ecken einer Pyramide mit dreieckiger
Grundfläche ausgerichtet. Die Dreieckseite misst 5 cm und die Pyramide hat eine Höhe von 15
cm. Wo liegt der MMP dieser vier Körper?
4.
Acht gerade Drahtstücke bilden eine quadratische Pyramide. Die Grundfläche der Pyramide
misst 4 cm x 4 cm und die vier andern Kanten sind je 10 cm lang. Wo liegt der MMP dieses
Drahtkörpers?
5.
Wo liegt der MMP einer quadratischen Pyramide, die eine Grundfläche von 40 cm2 und eine
Seite 18
Rotationsmechanik
Höhe von 10 cm aufweist?
6.)
Eine Holzkiste (60 cm x 40 cm Gundfläche, 50 cm hoch) steht auf einem starken Brett. Die
längere Seite des Kistenbodens sei quer zum Brett ausgerichtet. Nun werde das Brett an einem
Ende langsam angehoben, bis die Kiste sich überschlägt. Dies geschieht bei einem Neigewinkel von 45˚. In welcher Höhe befindet sich der Schwerpunkt der Kiste?
7.)
Eine Hantel, bestehend aus einem Stab (Masse 500 g,
Länge 30 cm) und zwei identischen Kugeln (Masse 7
kg, Radius 5 cm), werde exzentrisch (Exzentrizität
10 cm) auf eine Karusselldrehbank aufgespannt. Mit
welcher Kraft werden die Spindellager belastet,
wenn sich die Hantel eintausend Mal pro Minute
dreht?
Ein Blechstück mit der Form eines gleichseitigen Dreiecks (Masse 5 kg,
Seitenlänge 50 cm), werde so auf die Planscheibe einer Drehbank aufgespannt, dass die Achse der Arbeitsspindel eine der Höhen des Dreiecks
halbiert. Mit welcher Kraft muss das Blech festgehalten werden, wenn
sich die Spindel mit 1400 Umdrehungen pro Minute dreht?
9.)
Auf einem Hohlzylinder (Masse 10 kg, Aussenradius 20 cm) sind zwei
starke Faden in gleicher Richtung aufgewickelt worden. Die freien Enden der beiden Schnüre wurden zudem an einem Stab, der als Handgriff
dient, festgebunden. Mit welcher Kraft muss an diesem Griff vertikal
nach oben gezogen werden, damit die Symmetrieachse des Zylinders
eine Beschleunigung von 5 m/s2 nach oben erfährt?
10.) Ein auf einer horizontalen Eisfläche liegender Stab aus Kunststoff
(Masse 500 g, Länge 1m) werde von ein Kugel (Masse 5 g) getroffen, die horizontal aber normal zur Stabachse mit einer Geschwindigkeit von 500 m/s auftrifft. Wie schnell bewegt sich die
Stabmitte nach dem Einschlag der Kugel, wenn diese 20 cm von
einem Ende des Stabes entfernt steckenbleibt? Die Rechnung soll
nur auf zwei Stellen genau ausgeführt werden.
400
300
8.)
100
11.) Ein dünnes Holzbrett (Masse 200 g, Länge 50 cm), das an zwei langen Fäden hängt, werde von
einem grossen Lehmklumpen (Masse 400 g) getroffen. Das Brett liege horizontale ausgerichtet
in der Luft, der Lehmkörper treffe mit 10 m/s horizontal und lotrecht zum Brett auf und bleibe
20 cm von dessen Mitte entfernt kleben. Wie schnell bewegt sich das Zentrum des Gesamtsystems unmittelbar nach dem Stoss?
12.) Drei Arbeiter tragen eine dreieckige Steinplatte (Masse 150 kg, Seitenlängen 1.4 m, 2.0 m und
2.6 m) gleichmässiger Dicke an den drei Ecken über einen ebenen Platz.
Wieviel hat jeder zu tragen?
13.) Ein gerader Stahlträger (Masse 150 kg, Länge 3.00 m) sei genau horizontal ausgerichtet und
werde auf beiden Seiten durch eine Mauer abgestützt. Mit welcher Kraft drückt der Balken auf
die beiden Stützstellen, wenn er einen Gussstück (Masse 50 kg) zu tragen hat, das 1.20 m vom
einen Ende entfernt an einem Stahlseil hängt?
Rotationsmechanik
Seite 19
14.) Auf einem zweifach abgestütz0.5 m
1.5 m
1.25 m
ten, horizontal ausgerichteten
Brett (Masse 25 kg, Länge 4 m)
befinden sich drei gleich grosse
Betonklötze (Masse je 50 kg).
Die genaue Anordnung der Kör1m
per kann der Skizze entnommen werden.
Wie gross sind die Kräfte, mit denen das Brett an den beiden Stützstellen auf die Unterlage
drückt?
15.) Ein Schwungrad (Masse 150 kg) kann sich
zusammen mit der 3.5 m langen, starren
Welle (Masse 50 kg) um eine horizontale
Achse frei drehen. Die Welle wird über
zwei Wälzlager festgehalten. Mit welchen
Kräften belastet der drehbare Körper die
beiden Lager? Die genauen Abmessungen
können der Zeichnung entnommen werden.
1.5 m
1m
0.8 m
16.) Ein vier Meter langer Betonbalken (Masse 100 kg) soll von drei Arbeitern ein Stück weit getragen werden. Der erste packt den Balken an einem Ende an, der zweite greift in der Mitte zu
und der dritte umfasst den Balken einen Meter vom zweiten Ende entfernt. Nach dem Transport behauptet der mittlere Arbeiter, dass er alleine 50 kg getragen habe. Wieviel Gewicht haben demnach die beiden andern übernommen?
17.) Eine oben offene, würfelförmige Schachtel (Kantenlänge 10 cm) aus 1 mm dickem Stahlblech
(Dichte 7300 kg/m3) wird zu zwei Dritteln mit Wasser gefüllt. Wie hoch über dem Boden liegt
der Schwerpunkt des Gesamtsystems? Das Resultat soll auf einen Millimeter genau gerechnet
werden.
18.) Eine oben offene Blechwanne (Blechdicke 4 mm, Dichte 8900 kg/m3), die aus einem quadratischen Boden (Kantenlänge 0.5 m) und vier ein Meter hohen Seitenwänden besteht, wird auf
eine schiefe Ebene (Neigungswinkel 45˚) gestellt, mit einer Holzleiste am Rutschen gehindert
und dann mit Wasser gefüllt. Wieviel Wasser darf eingefüllt werden, bis die Wanne kippt?
19.) Zwei Arbeiter tragen einen Balken (Länge 5 m, Masse 30 kg) eine Treppe (Neigungswinkel
35˚) hinauf. Mit welcher vertikel gerichteten Kraft muss der hintere auf den Körper einwirken,
wenn jeder der beiden den Balken am jeweiligen Ende hochhebt?
Seite 20
Rotationsmechanik
2. Der Drehimpuls
Jeder rotierende Körper enthält Drehimpuls. Dies bedeutet, dass ein System seinen Rotationszustand
nur ändern kann, wenn es Drehimpuls aufnimmt oder abgibt. Der Drehimpuls darf wie der Impuls,
die elektrische Ladung oder die Entropie als Primärgrösse angesehen werden, die gespeichert und
zwischen den Systemen ausgetauscht wird. Vom Drehimpuls existieren drei verschiedene Ausführungen. Alle drei Sorten verhalten sich bei einer Koordinatentransformation wie die Komponenten
eines Vektors. Damit gleicht der Drehimpuls in seinem Transformationsverhalten dem Impuls, mit
dem er aber unter keinen Umständen verwechselt werden darf. Eigentlich besteht der Drehimpuls
aus sechs bilanzierfähigen Grössen. Neben den drei erwähnten Komponenten sind in der Relativitätstheorie noch drei weitere Mengen aufgetaucht. Die neu entdeckten Grössen haben etwas mit der
Translationsbewegung zu tun. In diesem Kapitel wollen wir uns auf nur eine Komponente beschränken. Trotz der eingeschränkten Sichtweise werden wir aber alle grundlegenen Gesetze der Drehmechanik kennenlernen. In vielen Fällen genügt es, wenn man die Drehmechanik mit nur einer
Drehimpulssorte vollständig beherrscht. Zudem ist die strikte Aufteilung des Drehimpulses in drei
getrennte Sorten gerade bei komplexeren Problemen zu empfehlen. Erst im Kapitel 6 soll dann der
Drehimpuls als vektorwertige Grösse untersucht werden.
Der Drehimpulsinhalt eines gestalttreuen Systems wächst proportional zur Winkelgeschwindigkeit.
Die zugehörige Kapazitivgrösse, Massenträgheitsmoment genannt, berechnet sich aus der Masse und
deren Anordnung im Körper. Drehimpuls kann weder entstehen noch verschwinden. Ändert also ein
Körper seinen Drehimpulsinhalt, muss er diese Menge mit einem zweiten System austauschen können. In den meisten Fällen steht die Erde mit ihrem riesigen Speichervermögen als Austauschpartner
zur Verfügung. Die Drehimpulsstromstärke bezüglich eines Systems heisst Drehmoment. Damit
weist die Drehmechanik eine ähnliche Struktur auf wie die Translationsmechanik. Leider sind die
Drehimpulsströme nicht so unmittelbar lokalisierbar wie die leitungsartigen Impulstransporte. Dies
erschwert den Zugang zur Drehimpulsbilanz ein wenig. Wir werden uns deshalb intensiv mit der
Frage auseinanderzusetzen haben, wie der Drehimpuls durch eine Struktur hindurchfliesst. Generell
kann gesagt werden, dass ein Körper immer dann Drehimpuls mit der Umgebung austauscht, wenn
in seinem Innern Impulsströme quer zur Bezugsrichtung fliessen.
Schwungräder, die grössere Mengen Drehimpuls speichern, findet man in vielen Maschinen und
Geräten. Das Einsatzgebiet dieser Räder erstreckt sich von den Verbrennungsmotoren über die
Stanzmaschinen bis zu den mechanischen Spielzeugen. Die Güte eines Schwungrades schätz man
mit Hilfe des spezifischen Energiefassungsvermögen ab. Dieses Speichervermögen gibt an, wieviel
Kilojoul Energie pro Kilogramm Masse maximal gespeichert werden kann. Über dieses Mass dürfen
sämtliche Energiespeicher wie Bleiakku, Benzintank oder Wasserstoffbehälter miteinander verglichen werden. Leider vergisst man oft, dass Energie nie alleine von einem Körper zu einem andern
transportiert werden kann; Energie braucht immer einen Träger. Zudem ist aus der er Sicht des 20.
Jahrhunderts Energie bloss ein anderes Wort für Masse. Ein Körper dreht sich also nicht, weil er
Energie sondern weil er Drehimpuls enthält. Die Rotationsenergie als solche ist nicht von der restlichen Energie des Körpers zu unterscheiden. Sie ist wohl zusammen mit dem Drehimpuls zugeführt
worden, doch besteht ihre einzige Wirkung darin, dass sie den Körper um ein kleines Quantum
schwerer macht. Ein Schwungrad speichert nur mechanisch abrufbare Energie, wenn es gleichzeitig
auch Drehimpuls enthält.
Die Drehimpulsbilanz liefert die zentrale Aussage zu diesem Kapitel. Sobald die Speicherfähigkeit
der Körper, d. h. ihre Drehimpulskapazitäten oder Massenträgheitsmomente, bekannt sind und die
Drehimpulsströme oder Drehmomente mengenmässig erfasst sind, kann das Rotationsverhalten
Rotationsmechanik
Seite 21
eines mechanischen Systems berechnet werden. Der Drehimpuls wurde wie der Impuls lange Zeit
nicht als eigenständige Menge angesehen. Beiden Grössen hat man nicht mal eine eigene Einheit
zugestanden. Einer der Gründe, wieso gerade die beiden wichtigsten Mengen der Mechanik über
Jahrhunderte ignoriert worden sind, dürfte in ihrem Überangebot zu suchen sein. Sowohl Impuls als
auch Drehimpuls werden von der Erde in belieben Mengen zur Verfügung gestellt. Sie müssen nur
noch mit Hilfe der Energie auf das entsprechende Niveau, d.h. auf die Geschwindigkeit oder die
Winkelgeschwindigkeit der einzelnen Körper, gepumpt werden. Weil vom Drehimpuls und vom
Impuls immer genügend vorhanden ist, redet man bei bewegten Körpern meistens nur noch von der
Hilfsgrösse Energie.
! Lernziele
Den Drehimpuls als die mengenartige Primärgrösse anerkennen.
Das Flüssigkeitsbild eines Drehimpulsspeichers skizzieren können.
Wissen, dass das Drehmoment für eine Drehimpulsstromstärke bezüglich des Systems steht.
Das Drehmoment eines Kräftepaares berechenen können.
Einer Kraft ein Drehmoment zuordnen können.
Die Grundgesetze der Mechanik formulieren können.
2.1 Drehimpulsspeicher
Ein an Ort rotieren Körper enthält keinen Impuls. Eine zweite mechani- Der Drehimpuls ist mengenarsche Grösse muss demnach als Verursacher der reinen Drehbewegung tig
angesehen werden. Dass man diese Grösse lange Zeit nicht als vollwertig akzeptiert hat, lässt sich schon an deren Namen erkennen: man umschreibt sie mit dem etwas umständlich klingenden Wort Drehimpuls.
Drehimpuls kann in einem System gespeichert oder zwischen zwei Systemen ausgetauscht werden; der Drehimpuls ist mengenartig. In einer
Abfolge von einfachen Experimenten wollen wir uns mit dieser Grösse
vertraut machen. Wird der Drehimpuls von Anfang an als Menge gesehen, ist die Versuchung klein, diese zentrale Grösse der Drehmechanik
bei konkreten Problemstellungen zu vergessen und damit ein fundamentales Gesetz der Physik zu verletzen.
In einem ersten Experiment setzen wir auf einen Stahlzylinder, der sich
N Mal pro Sekunde dreht, einen zweiten, gleich grossen, der selber
nicht rotiert. Infolge der immer vorhandenen Reibung beginnt sich der
obere Körper zu drehen und der untere verlangsamt sich, bis beide die
gleiche Winkelgeschwindigkeit erreicht haben. Schlussendlich drehen
sich beide Zylinder in einer Sekunde nur noch N/2 Mal.
Der ganze Bewegungsablauf kann nun mit Hilfe des Drehimpulses er- Drehimpuls wird solange ausklärt werden: sobald der zweite Zylinder auf den ersten abgesetzt wor- getauscht, bis sich die Drehden ist, gibt der untere so lange Drehimpuls an den oberen ab, bis beide zahl angeglichen hat
die gleiche Drehzahl erreicht haben. Aus der Halbierung der Drehzahl
Seite 22
Rotationsmechanik
folgt, dass die Winkelgeschwindigkeit linear mit dem gespeicherten
Drehimpuls wächst. Würde man zwischen die beiden Rutschflächen einen leichten und weichen Zwischenzylinder einfügen, so könnte man
beobachten, wie er vom hindurchfliessenden Drehimpulsstrom verformt
wird. Eine ähnliche Wirkung kann beim Einschrauben eines Zapfenziehers am Korken beobachtet werden. Nur hält man bei diesem Vorgang
die Flasche mit der andern Hand fest, so dass der Drehimpuls sofort
wieder abliesst.
Beim zweiten Experiment rotiert der obere Zylinder vor der Berührung
mit entgegengesetzt gleicher Winkelgeschwindigkeit in die andere Richtung. Sobald sich die Zylinder berühren, werden beide langsamer und
stehen nach kurzer Zeit still. Während der Reibphase sind die beiden
Flächen stärker erwärmt worden als im ersten Experiment, da eine grössere Menge an Bewegungsenergie vollständig dissipiert worden ist.
der Drehimpuls ist eine Spiegelbildgrösse
Beim Drehimpuls handelt es sich offensichtlich wieder - wie bei der
elektrischen Ladung und beim Impuls - um eine Spiegelbildgrösse. Indem man die eine Drehrichtung auswählt und als positiv deklariert, legt
man fest, welcher der beiden Körper einen Drehimpulsüberschuss und
welcher einen Mangel aufweist. Falls wir uns für den Drehsinn des unteren Zylinders entscheiden, ist der Drehimpuls während der Rutschphase
vom unteren Körper in den oberen geflossen und hat dessen Manko ausgeglichen. Die Richtung, in die der Drehimpuls fliesst, hängt offensichtlich von der Wahl des positiven Drehsinnes ab.
3. Experiment
Der ober Zylinder sei doppelt so hoch, besitze den gleichen Durchmesser und weise die doppelte Masse auf. Nachdem er auf den rotierenden
Zylinder gesetzt worden ist und sich die Winkelgeschwindigkeiten angeglichen haben, benötigt der untere Zylinder dreimal mehr Zeit für eine
Umdrehung als vorher.
die Drehimpulskapazität nennt
man Massenträgheitsmoment
Der untere Zylinder hat dem oberen zwei Drittel seines Drehimpulses
übergeben. Der massivere Körper speichert also bei gleicher Winkelgeschwindigkeit doppelt so viel Drehimpuls wie der leichtere. Das Drehimpulsfassungsvermögen oder die Drehimpulskapazität heisst Massenträgheitsmoment. Wir dürfen also behaupten, dass der obere Metallzylinder ein doppelt so grosses Trägheitsmoment aufweist wie der untere.
Leider ist die Masse nicht die einzige Grösse, die das Massenträgheitsmoment beeinflusst. Dazu ein viertes Experiment.
4. Experiment
Der obere Zylinder besteht nun aus einem Bleimantel mit einem Aluminiumkern. Beide Teilkörper sind so bemessen, dass der obere Zylinder
die gleiche Geometrie und dieselbe Masse aufweist wie der untere, der
immer noch aus Stahl gefertigt ist. Nachdem der ruhende Bleimantelkörper auf den rotierenden Zylinder gesetzt worden ist und sich die
Winkelgeschwindigkeiten angeglichen haben, vergrössert sich die Umlaufzeit des untern Zylinders auf mehr als das Doppelte.
Rotationsmechanik
Seite 23
Der obere Körper hat mehr als die Hälfte des Drehimpulses übernom- die Verteilung der Masse hat
men; er kann bei vorgegebener Winkelgeschwindigkeit mehr Drehim- einen grossen Einfluss auf die
puls speichern als der untere. Da beim Bleimantelkörper die Masse im Drehträgheit
Mittel weiter von der Drehachse entfernt liegt als beim gleich schweren
Stahlzylinder, muss die etwas anders geartete Massenverteilung die
Grösse des Massenträgheitsmomentes beeinflussen: Körperteile, welche
weit von der Drehachse entfernt sind, tragen mehr zum Trägheitsmoment bei als nähergelegene. Den genauen Zusammenhang zwischen
Massenverteilung und Drehimpulsspeicherfähigkeit werden wir später
formulieren
Der Tatsache, dass die Drehträgheit von der Verteilung der Masse ab- Eiskunstläuferinnen verändern
hängig ist, wird bei der Pirouette ausgenutzt. Zu Beginn der Figur sorgt ihr Massenträgheitsmoment
die Eiskunstläuferin für einen hinreichend grossen Drehimpulsinhalt.
Indem sie sich dann auf die Spitze einer Kufe stellt, verhindert sie einen
allzugrossen Drehimpulsverlust. Dann verkleinert sie ihr Massenträgheitsmoment durch das Einziehen von Arme und Beine. Als Folge dieser
Kapazitätsänderung steigt die Winkelgeschwindigkeit sehr stark an. Bei
der Piroutte bleibt nur der Drehimpulsinhalt der Sportlerin ungefähr
konstant. Die Bewegungsenergie steigt dann linear mit der Winkelgeschwindigkeit an. Wie diese Energie zugeführt wird, kann man durch
gezieltes Nachdenken selber herausfinden.
Drehimpuls darf unter Energiezufuhr aus dem Nichts heraus getrennt unter Energiezufuhr kann
werden. Eine solche Trennung erfolgt zum Beispiel im Frachtraum ei- Drehimpuls aus dem Nichts
nes Spaceshuttles, wenn ein Astronaut versuchen sollte, einen Satelliten heraus getrennt werden
in Rotation zu versetzen. Dann wird er feststellen, dass sich das Raumschiff andersherum zu drehen beginnt. Hätten wir alle eine gewisse
Weltraumerfahrung, so würde es uns viel leichter fallen, die Substanzähnlichkeit des Drehimpulses zu erkennen. Hier auf der Erde können
wir mit dem Boden Drehimpuls in beliebigen Mengen austauschen,
ohne dass sich dadurch die Erde auf die andere Seite wegdreht. Wir Erdenbewohner haben unsere liebe Mühe mit dem Drehimpuls als eigenständige Menge. Nicht weil wir ihn selten zwischenspeichern, sondern
weil wir ihn andauernd in beliebiger Menge mit der Erde austauschen
können.
Die Physik des 20. Jahrhunderts stellt den Drehimpuls auf die gleiche Elektronen müssen spinen
begriffliche Stufe wie die elektrische Ladung oder die Masse. Die meisten Elementarteilchen weisen neben der Ladung und der Masse einen
ganz bestimmten Drehimpuls auf, den sie bei ihrer Entstehung mitbekommen haben. Im Falle einer Wechselwirkung können die Teilchen ihren Drehimpuls, derSpin genannt wird, nur paketweise mit der Umwelt
austauschen. Die zugehörige Paketgrösse ist durch eine universelle Naturkonstante mit einem Betrag von 1.054·10-34 Nms festgelegt. Der Spin
eines Elektrons kann zum Beispiel unabhängig von der Raumrichtung
nur zwei Werte annehmen, die entgegengesetzt gleich gross sind. Der
Betrag des Elektronenspins muss deshalb immer gleich gross sein wie
die Hälfte der oben erwähnten universellen Konstanten. Nur so kann das
Elektron den Drehimpuls in der erlaubten Stückelung mit einem zweiten
Seite 24
Rotationsmechanik
System austauschen. Elektronen die nicht spinen, sind bis heute keine
entdeckt worden. Interessanterweise speichern Protonen und Neutronen
gleichviel Drehimpuls wie die Elektronen, obwohl sie als Kernbauteile
etwa zweitausend Mal schwerer sind als ihre atomhüllenbildenden Partner.
Bosonen und Fermionen
Spin up
Spin down
Der Spin ist mehr als nur ein Eigendrehimpuls. Der Spin hängt mit dem
wohl wichtigsten Ordnungsprinzip der Physik zusammen. Dieses Prinzip verlangt, dass alle Elementarteilchen in zwei Klassen eingeteilt weden müssen. Die eine Klasse besteht aus den Teilchen, deren
Eigendrehimpuls ein halbzahliges Vielfaches der oben erwähnten Naturkonstante ist. Ihre Mitglieder heissen Fermionen. Die Vertreter der zweiten Gruppe, die Bosonen, müssen einen ganzzahligen Spin aufweisen.
Ihr Drehimpulsinhalt darf also nur ein ganzzahliges Vielfaches der universellen Naturkonstante ausmachen. Fermionen und Bosonen verhalten
sich völlig verschieden. So duldet kein Fermion ein zweites im selben
Zustand, wogegen die Bosonen ihre identischen Partner geradzu zum
gemeinsamen Agieren zwingen. Der bosonenhafte Gruppendruck wird
zum Beispiel im LASER ausgenutzt. Bei diesem Gerät sorgen die vom
angeregten Stoff zuerst ausgesendeten Lichtteilchen (Photonen) dafür,
dass alle nachfolgend emittierten Lichtquanten im Takt mitschwingen.
Dadurch entsteht ein zusammenhängender Lichtstrahl, ein eigentlicher
Lichtkristall. Die Elektronen als leichtgewichtige Mitglieder der Fermionenfamilie könnten die Materie nie dermassen stabilisieren, wenn
sie nicht dem arttypischen Verdrängungsprinzip unterliegen würden.
Weil die Elektronen einander den Platz streitig machen, füllt ein fester
Stoff ein ganzes bestimmtes Raumvolumen aus. Zudem wiedersetzt sich
ein Festkörper einem Kompressionsversuch mit einer unglaublichen Festigkeit. Diese Widerstandskraft heisst Entartungsdruck und hat seine
Ursache in der fermionischen Eigenbrödlerei der Elektronen.
! Kontrollfragen
1.)
2.)
3.)
4.)
5.)
6.)
Ein Walze rollt über eine horizontale Unterlage. Welche mengenartigen Grössen speichert sie
dabei?
Die Walze wird infolge der unvermeidlichen Reibung immer langsamer. Beschreiben Sie, was
mit den einzelnen Mengen während des Auslaufvorganges geschieht.
Sie sitzen auf einem Drehstuhl mit vertikaler Achse. Nun wird der Stuhl von einer zweiten
Person mit einem kräftigen Stoss in Rotation versetzt. Woher kommt der Drehimpuls, den Sie
zusammen mit dem Drehspul speichern? Wie können Sie die Winkelgeschwindigkeit verändern, ohne den Boden zu berühren
Ein auf dem Tisch liegendes, gekochtes Ei soll mit einer Hand in eine reine Drehbewegung
versetzen werden. Wie gehen Sie vor? Was passiert mit dem Arm, wenn der Drehimpuls durch
ihn hindurchfliesst?
Kann ein Schwungrad von atomarer Grösse mit einer konstanten Winkelbeschleunigung in
Rotation versetzt werden?
Worin unterscheiden sich die Fermionen von den Bosonen?
Rotationsmechanik
Seite 25
2.2 Das Flüssigkeitsbild
Mangel
Trägheit
ω
Ueberschuss
ω
Die ganze Struktur der Rotationsmechanik kann in ein Flüssigkeitsbild Flüssigkeitsbilder sind
eingebettet und damit anschaulich gemacht werden. Diese Darstellung, anschaulich
die sehr nahe bei unserer sinnlichen Erfahrung liegt, ebnet den Zugang
zur Theorie in einem auf rein analytischem Wege kaum zu erreichenden
Masse. Im Flüssigkeitsbild stellen wir uns den Drehimpuls als eine Art
Wasser vor, das entweder in zylinderförmigen Gefässen, den einzelnen
Körpern, oder in einem riesigen See, der Erde, gespeichert wird. Die
Grundfläche eines jeden Gefässes entspricht dem zugehörigen Massenträgheitsmoment und aus der Winkelgeschwindigkeit wird eine simple
Füllhöhe.
Fig. 2. - 1: Der Drehimpuls
kann als Flüssigkeit graphisch dargestellt werden.
Dabei verwandelt sich das
Massenträgheitsmoment in
die Grundfläche eines Gefässes und aus der Winkelgeschwindigkeit wird eine
Füllhöhe.
Trägheit
Der Inhalt eines Gefässes ist immer positiv, wogegen ein Schwungrad, positiver und negativer Drehwie wir weiter oben diskutiert haben, auch einen Mangel an Drehimpuls impuls
aufweisen kann. Diesen grundlegenden Unterschied zwischen dem
Drehimpuls und dem Volumen können wir bei der Transformation ins
Flüssigkeitsbild überdecken, indem wir auch Füllhöhen zulassen, die
unter dem Niveau des Sees liegen. Ein negativer Drehimpuls entspricht
dann einem Mangel an Flüssigkeit. Wird also ein Schwungrad durch die
unvermeidliche Reibung abgebremst, fliesst über dem Lager immer
Drehimpuls winkelgeschwindigkeitsmässig hinunter. Bei einem positiv
rotierenden Schwungrad strömt der Drall infolge der Reibung hinaus
und bei einem Rad, das sich anfänglich gegen den positiven Sinn dreht,
dringt Drehimpuls von aussen rein und erhöht die Winkelgeschwindigkeit von einem negativen Wert auf Null.
Solange die wechselwirkenden Körper auf einer gemeinsamen Achse die Drehimpulsbilanz als
angeordnet sind, liefert das Flüssigkeitsbild alle funktionalen Beziehun- Kernaussage
gen, d.h. die richtigen Gleichungen. Die zentrale Formel, die den Drehimpulsinhalt eines Systems mit den zugehörigen Stromstärken
verknüpft, verwandelt sich mit Hilfe der Flüssigkeitsanalogie in eine
einfache Volumenbilanz. Ein Problem ist damit noch nicht gelöst: wie
identifiziert man Drehimpulsströme und wie misst man ihre Stärke? Mit
dieser Problemstellung wollen wir uns im nächsten Abschnitt beschäftigen.
Seite 26
Beispiel 4:
Rotationsmechanik
Zwei Schwungräder, die über eine Rutschkupplung miteinander verbunden sind, werden von links her mit
einem in zehn Sekunden linear von Null auf den Maximalwert steigenden Drehimpulsstrom versorgt. Das
linke Schwungrad weise ein doppelt so grosses Massenträgheitsmoment auf wie das rechte. Die Kupplung
lässt eine Drehimpulstrom durch, dessen Stärke höchstens einen Sechstel des von links zufliessenden
Maximalwertes betragen darf. Wann beginnt die Kupplung zu rutschen?
I
t
Lösung 4:
Aus dem zugehörigen Flüssigkeitsbild kann die richtige Lösung praktisch unmittelbar herausgelesen werden: solange die Niveaus in beiden Gefässen zusammen ansteigen, fliesst dem ersten Behälter von links
her das Dreifache von dem zu, was im Verbindungsrohr nach rechts wegströmt. Somit koppelt der rechte
Rotator ab, sobald der linke Drehimpulsstrom die Hälfte seines Maximalwertes erreicht hat. Dies ist fünf
Sekunden nach Prozessbeginn der Fall.
In den nächsten fünf Sekunden fliesst nur noch ein konstant gehaltener Drehimpulsstrom in das rechte
Schwungrad hinein. Das linke Rad hat den weiter anschwellenden Zustrom aufzunehmen und erreicht
dadurch eine viel höhere Drehzahl als das rechte.
die Pirouette im Flüssigkeitsbild
Drehimpulskapazitäten oder Massenträgheitsmomente sind, wie schon
aus den einführenden Experimenten hervorgeht, von der Verteilung der
Masse abhängig. Generell gilt: je näher die Masse beim MMP liegt, desto kleiner wird das zugehörige Trägheitsmoment. Dieser Sachverhalt
kann auf dem Eisfeld direkt studiert werden. Zieht die zu einer Pirouette
ansetzende Eisläuferin die Arme ein, rotiert sie schneller; streckt sie die
Hände wieder vom Körper weg, verlangsamt sich die Drehbewegung.
Figur 2.-2 zeigt diesen Vorgang im Flüssigkeitsbild.
Fig. 2. - 2: Die Pirouette im
Flüssigkeitsbild. Beim Einziehen der Arme verkleinert
die Eiskunstläuferin ihre
Drehträgheit und quetscht
damit den Drehimpuls auf
ein höheres Niveau.
die Grenzen des Flüssigkeitsbildes
Im Flüssigkeitsbild entspricht das Einziehen der Arme einem Verkleinern des Gefässquerschnittes. Dabei wird der Drehimpuls wird auf ein
höheres Niveau gequetscht. Dreht sich der Körper gegen die positive
Richtung, besitzt einen negativen Inhalt an Drehimpuls. Er enthält weniger als Nichts und kann nur durch Drehimpulszufuhr abgebremst werden. Im Flüssigkeitsbild erscheint dieser Mangel als Loch. Das
Gefässniveau liegt tiefer als die Oberfläche des umgebenden Sees, der
Rotationsmechanik
Seite 27
die Erde darstellt. Leider lässt sich die Dynamik der Piroutte bei negativem Drehsinn nicht mehr direkt ins Flüssigkeitsbild übersetzen; eine
vorzeichenfähige Grösse ist eben nur beschränkt auf eine positive Menge abbildbar.
? Kontrollfragen
7.)
8.)
9.)
Wie manifestiert sich im Flüssigkeitsbild das Massenträgheitsmoment?
Welcher Grösse entspricht die Füllhöhe?
Beschreiben Sie das erste und zweite Experiment aus dem vorhergegangenen Abschnitt mit
Hilfe des Flüssigkeitsbildes.
10.) Ein Schwungrad auf das ein Drehmoment einwirkt, erfährt eine Winkelbeschleunigung. Übersetzen Sie diese Aussage ins Flüssigkeitsbild.
11.) Drehimpuls fliesst wie Wasser freiwillig immer nur hinunter. Was heisst hinunter in der Drehmechanik und was ist mit freiwillig gemeint?
2.3 Das Drehmoment
Ein gekochtes Ei, das in eine schnelle Rotation versetzt wird, steht nach wie man ein Ei in Rotation verwenigen Umdrehungen aufrecht auf dem Hinterteil. Dieses verblüffende setzt
Verhalten kann nur richtig deuten, wer über fundierte Kenntnisse aus der
Kreiseltheorie verfügt. Wir wollen uns hier mit der weniger weit gehenden Frage beschäftigen, was zu tun ist, damit ein Körper zu rotieren anfängt, ohne davonzufliegen. Das Ei soll sich ja bloss drehen und ja nicht
vom Tisch fallen. Jeder, der den Trick vorführen will, macht es intuitiv
richtig: das Ei wird mit beiden Daumen festgehalten und dann mit einer
gegenläufigen Bewegung angeschoben.
Eine auf dem Tastsinn beruhende Analyse des Vorganges ergibt, dass Kräftepaare erzeugen reine
von den beiden Daumen her neben der Druck- noch je eine Reibkraft Drehmomente
auf das Ei einwirkt. Diese tangential wirkenden Kräfte versetzen das Ei
in Rotation. Alle frei beweglichen Körper beginnen sich zu drehen, sobald ein reines Kräftepaar einwirkt. Bei einem Kräftepaar fliesst der zugehörige Impuls quer zu seiner Bezugsrichtung durch das System
hindurch. Weil sich dabei der Impulsinhalt des Körpers nicht ändert,
bleibt er an Ort. Die Wirkung eines Kräftepaares heisst Drehmoment.
Allgemein nennt man jede Einwirkung auf ein System, die eine Rotation bewirkt, Drehmoment. Drehmomente geben an, mit welcher Rate ein
System Drehimpuls mit der Umgebung austauscht.
Zur quantitativen Herleitung der Beziehung zwischen Kraft und Dreh- der zweiarmige Hebel
moment ziehen wir wieder Hebelgesetz von Archimedes bei. Im zweiarmigen Hebel (Fig. 2.3), dessen Masse wir vernachlässigen, fliessen zwei
Impulsströme von den belasteten Stellen gegen die Mitte, um dann über
die Auflagestelle das System wieder zu verlassen.
Seite 28
Rotationsmechanik
Fig. 2. - 3: Beim zweiarmigen Hebel fliessen zwei Impulsströme gegeneinander.
Gleichgewicht herrscht, sobald das Produkt aus Stromtärke und seitliche Versetzung für beide Ströme gleich
gross ist
x
Schnittbild
das Hebelgesetz
Fig. 2. - 4: Zur korrekten
Bestimmung des Drehmomentes wird jeder Kraft eine
Wirklinie zugeordnet. Das
Produkt aus der einen Kraft
und dem Abstand der Wirklinien des Paares ergibt dann
das Drehmoment. Beim zweiarmigen Hebel kann die
Lagerkraft in zwei Teile zerlegt werden, die dann zusammen mit den beiden andern
Einwirkungen je ein Kräftepaar ergeben.
y
Impulsstrombild
Das Hebelgesetz verlangt nun, dass das Produkt aus Impulsstromstärke
und Länge des impulsstromführenden Teils für beide Arme gleich gross
sein muss, damit Gleichgewicht herrscht. Der von rechts kommende Impulsstrom würde, falls er alleine vorhanden wäre, den Hebel im Uhrzeigersinn in Drehung versetzen. Der andere erzeugt die gegensätzliche
Wirkung. Dem einen Drehmoment ist also ein positives, dem andern ein
negatives Vorzeichen zuzuordnen; der eine Impulsstrom führt dem Hebel also Drehimpuls zu, der andere entzieht andauernd die gleiche Menge. Streng mathematisch sind wir nicht mehr frei bei der Wahl des
positiven Vorzeichens. Falls das angegebene Koordinatensystem rechthändig ist, weist die z-Achse nach hinten und die zugehörige positive
Drehrichtung verläuft uhrzeigersinnig. Die konsequente Verwendung eines rechthändigen Koordinatensystems ist aber erst angezeigt, wenn
man sich mit echt dreidimen-sionalen Drehungen beschäftigt. Solange
nur ebene Probleme untersucht werden, ist die Wahl des Vorzeichens
frei.
Achse
die Wirklinie
Ein zweiarmiger Hebel gleicht selten einem gewöhnlichen Balken. Abgewinkelte und geschwungene Formen ersetzen bei vielen Anwendungen den gestreckten Doppelarm. In solchen Fällen ordnet man jeder
Kraft eine Wirklinie zu. Das zugehörige Drehmoment berechnet sich
dann als Produkt aus dem Betrag der einen Kraft und dem Abstand der
Wirklinien des zugehörigen Kräftepaares.
Impulsströme im Winkelhebel
Der Impulsstrom entfaltet offensichtlich nur dann eine Drehwirkung,
wenn er seitwärts zu seiner Bezugsrichtung fliesst. Mehr über den quan-
Rotationsmechanik
Seite 29
titativen Zusammenhang von Impulsstrom und Fliessstrekke erfahren
wir am Beispiel des Winkelhebels. Bei einem rechtwinklig geformten
Hebel wirke auf den einen Arm eine Kraft ein, die genau in x-Richtung
weist. Die Kraft, die am andern Teil angreift, sei dagegen in die positive
y-Richtung orientiert.
Fig. 2. - 5: Im oberen Hebelarm fliesst der y-Impuls in
die negative x-Richtung.
Gleichzeitig fliesst x-Impuls
im andern Arm entgegen der
y-Achse.
x
y
Schnittbild
Strombild
In beiden Hebelarmen wird der jeweilige Impuls gegen die Bezugsrich- das Drehmoment bei ebenen
tung der andern Sorte transportiert und entfaltet dabei eine Drehmomen- Körpern
tenwirkung. Ist der Hebel im Gleichgewicht, so fliesst über den einen
Arm exakt soviel Drehimpuls zu, wie im andern wieder abgeführt wird.
Im rechthändigen Koordinatensystem ist das mit dem x-Impulsstrom
verbundene Drehmoment positiv. Dementsprechend führt der Impulsstrom im andern Arm zu einem Drehimpulsabfluss. Der Ausdruck für
die beiden Einzeldrehmomente kann mit einer einzigen Formel zusammengefasst werden.
M = I px ⋅ ∆y − I py ⋅ ∆x
(2.1)
In Formel (2.1) sind nur die Beträge der Stromstärken einzusetzen; das die koordinatenfreie FormulieVorzeichen von ∆x und ∆y wird durch die Fliessrichtung des Impulses rung
festgelegt. Dreht man das Koordinatensystem in der x-y-Ebene, verändern sich sowohl die Impulsstromstärken als auch die zugehörigen Koordinatenabschnitte. Das mit Hilfe von (2.1) berechnete Drehmoment
bleibt dagegen konstant. Um in die koordinatenfreien Darstellung überzugehen, ordenet man sowohl der Eintritts- als auch der Austrittsstelle
des Impulsstromes je einen Kraftpfeil zu. Das Drehmoment dieses Kräftepaar berechnet sich dann - wie weiter oben schon diskutiert - als Produkt aus dem Betrag der einen Kraft und dem gegenseitigen Abstand der
Wirklinie.
s2
F1
s1
F2
M = F1 ⋅ s1 − F2 ⋅ s2
Fig. 2. - 6: In der koordinatenfreien Darstellung erzeugt
jedes Kräftepaar ein Drehmoment, das gleich dem Produkt aus dem Betrag der
einen Kraft und dem
Abstand der zugehörigen
Wirklinien ist.
Seite 30
Rotationsmechanik
? Kontrollfragen
12.)
Wie muss der Impuls durch den Körper hindurchfliessen, damit ein Drehmoment auf diesen
einwirkt?
13.) Was ist unter einem Kräftepaar zu verstehen? Wie berechnet man das Drehmoment eines Kräftepaares?
14.) Die beiden Kräfte eines Paares werden mit Hilfe eines Koordinatensystems so zerlegt, dass
sowohl die x- als auch die y-Komponente ungleich Null sind. Fertigen Sie von dieser Situation
eine Zeichnung an und skizzieren Sie dann sowohl das x- als auch das y-Impulsstrombild. Wie
berechnet man das zugehörige Drehmoment?
2.4 Die Drehimpulsbilanz
Drehmoment und Bilanz
Ein Körper, auf den ein Drehmoment einwirkt, muss seinen Bewegungszustand ändern. Weil er Drehimpuls mit der Umgebung austauscht, kann seine Drehzahl nicht konstant bleiben. Das Drehmoment
steht zum Drehimpuls wie die Kraft zum Impuls. Tritt Drehimpuls in einen Körper ein, ordnen wir der Stromstärke ein positives Drehmoment
zu. Verlässt der Drehimpuls das System, markieren wir die Austauchsrate mit einem negativen Drehmoment. Die Bilanzgleichung verlangt nun,
dass die Summe über alle Drehimpulsströme gleich der Inhaltsänderungsrate ist
∑I
Li
= MRe s = L«
(2.2)
i
Einheiten
Bilanz und Hebelgesetz weisen dem Drehimpuls die Einheit Newtonmetersekunde (Nms) zu. Leider haben sich die zuständigen Normengremien noch auf keinen Namen für diese Einheit einigen können. Ein
Vorschlag wäre, dass man dem Drehimpuls die Einheit Euler (E) zuweisen würde. Leonhard Euler (1707 - 1783) hat sich als einer der ersten
mit der Bewegung der starren Körpern auseinandergesetzt. Das Massenträgheitsmomentes, das als eigentliche Drehimpulskapazität definiert
ist, wäre dann in E·s zu messen. Setzt man die offiziell zulässigen Einheiten ein, muss dem Trägheitsmoment die Einheit N·m·s2 zugewiesen
werden. Wird nun noch das Newton durch die Basiseinheiten ausgedrückt, ergibt sich für das Trägheitsmoment
kg·m2.
Beispiel 5:
Auf zwei Schwungräder, die über eine Rutschkupplung verbunden sind, wirke von links her ein in zehn
Sekunden linear von Null auf 60 Nm linear anwachsendes Drehmoment ein. Das rechte Schwungrad weise
ein Massenträgheitsmoment von 25 kgm2 auf; das linke sei doppelt so träge. Die dazwischenliegende
Kupplung beginnt zu rutschen, sobald das “übertragene” Drehmoment grösser als 10 Nm wird. Mit welchen Winkelgeschwindigkeiten rotieren die Räder nach zehn Sekunden?
Lösung 5:
Aus dem zugehörigen Flüssigkeitsbild (vergl. Aufgabe 4) kann die richtige Lösung herausgelesen werden.
Anfänglich strömt ein Drittel des von links her zufliessenden Drehimpulses ans rechte Schwungrad weiter.
Nach fünf Sekunden hat der durch die Kupplung fliessende Strom den kritischen Wert von 10 Nm erreicht.
Bis zu diesem Zeitpunkt sind insgesamt 75 Nms zugeflossen, was eine Winkelgeschwindigkeit von einem
Radianten pro Sekunde ergibt. In den nächsten fünf Sekunden fliesst nur noch ein konstant gehaltener
Rotationsmechanik
Seite 31
Drehimpulsstrom von 10 Nm in das rechte Schwungrad hinein, womit sich dessen Winkelgeschwindigkeit
um zwei auf drei Radianten pro Sekunde erhöht. Dem linken Rad werden in der gleichen Zeit von links her
weitere 225 Nms zugeführt. Zieht man die 50 Nms ab, die nach rechts weitergeflossen sind und rechnet
den vorher schon erreichten Wert dazu, erhält man eine Winkelgeschwindigkeit von 4.5 s-1.
? Kontrollfragen
15.) Wie hängt das Drehmoment mit dem Drehimpuls zusammen?
16.) Die Drehimpulsbilanz verlangt, dass die Summe über alle Drehimpulsstromstärken (Drehmomente) gleich der Änderungsrate des Inhaltes ist. Wie sieht die Drehimpulsbilanz aus, wenn
die Inhaltsänderungsrate durch den kapazitive Zusammenhang ersetzt worden ist?
17.) Nehmen wir an, der Drehimpuls dürfe in Euler gemessen werden. Mit welcher Einheit wird
dann das Drehmoment gemessen?
2.5 Drehimpulsströme
Erzeugt ein Drehimpulsstrom eine messbare Wirkung? Kann man den Drehimpulsströme sind nur
Drehimpuls analog zum Impuls längs seines Transportweges verfolgen? bedingt lokalisierbar
Leider muss diese Frage verneint werden. Der Drehimpuls fliesst durch
den Raum hindurch, ohne direkte Spuren zu hinterlassen. Wie wir im
vorletzten Abschnitt gesehen haben, wird das Drehmoment von einem
Kräftepaar erzeugt, d.h. ein im System seitwärts transportierter Impuls
erzwingt einen Drehimpulsaustausch. Diese Verknüpfung, die für alle
Körper unabhängig von ihrem Bewegungszustand gilt, legt aber nur die
Rate fest, mit der ein System Drehimpuls aufnimmt oder abgibt. Über
den genauen Transportweg macht Formel (2.1) keine Aussage. Wie eine
eingehendere Untersuchung zeigt, kann ein Drehimpulstrom nicht uneingeschränkt lokalisiert werden. Nur bei Vorgängen, bei denen sich die
Massenverteilung im Raum nicht ändert, kann aus der Geometrie der
Impulsströme direkt die Verteilung des Drehimpulsstromes ermittelt
werden. In diesem Abschnitt untersuchen wir zwei wichtige Spezialfälle
etwas eingehender. Im ersten Fall erfolgt der Transport in der Bezugsebene drin, d.h. der Drehimpuls fliesst senkrecht zu der möglichen
Drehachse weg. Bei der zweiten Problemstellung wird der Drehimpuls
parallel zur Drehachse transportiert.
Ein Riementrieb, der aus zwei gleich grossen Scheiben und aus einem Impuls- und Drehimpulstransumlaufenden Riemen besteht, sei durch eine konstante Kraft, die auf die port im Riementrieb
beiden Achsenlager einwirkt, vorgespannt. Werden die beiden Scheiben
sodann in gegenläufigem Sinne weggedreht, bis der obere Riemen vollständig entspannt ist, bildet sich ein unverzweigter Impulskreisstrom
aus: der von einem Lager zum andern fliessende Impulsstrom, die „Vorspannkraft“, wird über den unteren Riemen zurückbefördert. Dieser Impulsstromkreis ist nun für den gleichzeitig stattfindenen Transport von
Drehimpuls verantwortlich. Parallel zum gespannten Teil des Riemens
wird Drehimpuls von einer Scheibe zur andern befördert, wobei der Impulsstrom den Drehimpulstransport beidseits begrenzt. Drehimpuls
kann also nur in der Bezugsebene wegfliessen, wenn der Transport beid-
Seite 32
Rotationsmechanik
seits von einem Impulsstrom berandet wird. Weil die Drehimpulsstromstärke gleich dem Drehmoment des auf die Riemenscheiben wirkenden
Kräftepaares ist, kann der Zusammenhang zwischen Drehimpuls- und
Impulsstrom sofort hingeschriebenwerden. Wir werden uns aber erst im
neunten Kapitel mit der quantitativen Ausformulierung solcher Verknüpfungen beschäftigen.
Fig. 2. - 7: Im einseitig statisch belasteten Riementrieb
fliesst ein Impulsstrom im
Kreis herum. Dieser Stromkreis induziert einen konstanten Drehimpulsstrom.
der Drehimpulsstrom im
Flacheisen
Fig. 2. - 8: Bei reiner Biegebeanspruchung fliesst Drehimpuls durch das Flacheisen
hindurch.
x
keine Belastung
Druckbelastung
y
Drehimpulsstrom
Zugbelastung
Ersetzt man den Riementrieb durch ein Flacheisen (ein langes, flaches
Stück Stahl) und schweisst in der Nähe der beiden Enden auf der Breitseite je einen seitlich abstehenden Bolzen mit mit einem Handgriff an,
kann auch mit diesem „Gerät“ Drehimpuls übertragen werden. Der
Drehimpuls beginnt zu fliessen, sobald beide Bolzen gegeneinander verspannt werden. In der einen Hälfte des Querschnittes, dort wo das Material auf Druck beansprucht wird, fliesst Impuls in die positive Richtung.
In der andern Hälfte herrscht Zug, d.h. dort wird Impuls in die negative
Richtung transportiert.
Zugbelastung
Drehimpulsstrom
Druckbelastung
der Drehimpulsstrom bei Biegebelastung
Beim auf Biegung belasteten Flacheisen sind sowohl die Impuls- als
auch die Drehimpulsströme inhomogen. Der Drehimpuls strömt auf der
Mittelachse am stärksten, wogegen die begleitenden Impulsströme gegen die Ränder hin an Intensität gewinnen. Die Impulsstromdichte, die
auch Zug- oder Druckspannung heisst, ergibt sich aus den für das jeweilige Material gültigen Gesetzen. Wenn wir annehmen, dass im ganzen
Querschnitt die Dehnung linear mit der Spannung zunimmt, wird jede
materielle Fläche durch die Beanspruchung ein wenig schiefgestellt. Die
Impulsstromdichte (Zug- oder Druckspannung) wächst deshalb von der
Mitte her gegen ausssen linear an. Nun denken wir uns das Flacheisen
als ein ganzes Bündel von Lammellen. In einem beliebigen Querschnitt
darf dann der einzelnen Lamelle eine Zug- oder Druckkraft zugordnet
werden. Je zwei Kräfte bilden ein Paar, wobei den beiden äussersten Lamellen das mächtigste Kräftepaar zuzuordnen ist. Durch die Summation
über alle Drehmomente dieser Paare erhält man das Drehmoment oder
die totale Drehimpulsstromstärke.
Rotationsmechanik
Seite 33
In den beiden Achsen des Riementriebes oder in den Bolzen des Flach- der Drehimpulsstrom bei Toreisens fliesst der Drehimpuls normal zur Wirkebene, sobald diese Bau- sion
teile belastet werden. Den durch den Drehimpulstransport ausgelösten
Deformationszustand nennt man Torsion. Bei einem tordierten Hohlprofil wird der Drehimpulstrom ähnlich wie beim Riementrieb von einem
Impulsstrom räumlich begrenzt. Doch diesmal sind zwei Sorten Impuls
beteiligt, die zudem in die Bezugsrichtung der dritten Impulskomponente fliessen. Die querfliessenden Impulsströme formen zusammen ein geschlossenes Rohr, in dessen Innern der Drehimpuls normal zur Wirkebene transportiert wird.
x
z
x
y
y
y
x
y
Fig. 2. - 9: Bei einem Vierkantprofil, das auf Torsion
beansprucht ist, wird der
hindurchfliessende Drehimpulsstrom von vier Impulsströmen begrenzt.
Impuls, der normal zur eigenen Bezugsrichtung fliesst, belastet das Ma- die zugeordneten Schubspanterial auf Scherung und die zugehörige Impulsstromdichte heisst Schub- nungen
oder Scherspannungen. Scherspannungen gehorchen einem speziellen
Gesetz: fliesst zum Beispiel x-Impuls in z-Richtung, so muss an derselben Stelle gleichviel z-Impuls in x-Richtung transportiert werden. Dieses Gesetz der zugeordneten Schubspannung wird üblicherweise mit
Hilfe der Drehimpulsbilanz bewiesen. Der Beweis geht davon aus, dass
die Drehimpulsbilanz aus der Impulsbilanz abgeleitet werden kann. Ich
verzichte hier auf eine Entgegnung und postuliere, dass das Gesetz der
zugeordneten Schubspannungen unabhängig von Material und Geometrie immer zutrifft. Angewendet auf das belastete Hohlprofil verlangt
dieses Gesetz, dass die in z-Richtung fliessenden x- und y-Impulssorten
einen z-Impulsstrom nach sich ziehen, der in der x-y-Ebene herumfliesst
(um besser argumentieren zu können, habe ich das Koordinatensystem
von Figur 2.-9 übernommen). Der z-Impulsstrom, der damit den Drehimpuls längs seines ganzen Transportweges wirbelförmig umströmt, hat
weder Quellen noch Senken (der Impuls kann in einem ruhenden Bauteil nirgends gespeichert werden). Schubflusserhaltung heisst diese Erscheinung in vielen Lehrbüchern der Festigkeitslehre. Der Schubfluss
strömt also im Querschnitt des verdrehten Voll- oder Hohlprofils als
zweidimensionale „Strömung“ um den Drehimpulstransport herum und
setzt diesem ein klare Grenze.
x
Fig. 2. - 10: Bei der Torsion
wird der Drehimpulstransport von einem Schubfluss
umhüllt.
y
In dünnwandigen, auf Torsion belasteten Rohren ist der Schubfluss der Drehimpulsstrom im runpraktisch homogen. Damit reduziert sich der Zusammenhang zwischen den Vollprofil
Seite 34
Rotationsmechanik
r
Impuls- und Drehimpulstransport auf eine gewöhnliche Multiplikation:
das Drehmoment auf eine Schnittfläche oder eben die Stromstärke des
durch das Rohr fliessenden Drehimpulses ist gleich dem Betrag der
Schubspannung multipliziert mit der materiellen Querschnittfläche und
dem Rohrradius. Bei einem Vollquerschnitt sieht die Rechnung etwas
komplizierter aus. Wieder folgt aus dem Hooke’schen Gesetz für den
verdrehten Zylinder, dass die Schubspannung linear mit dem Radius
wächst. Unterteilt man den Vollzylinder in lauter dünnwandige Rohre
der Dicke dr, bestimmt dann die zugehörige Drehimpulsstromstärke und
summiert zum Schluss über alle Teile auf, folgt daraus die Stärke des totalen Drehimpulsstromes.
R
I L = ∫ τ ⋅ r ⋅ dA = ∫ G ⋅ γ ⋅ r ⋅ 2 ⋅ π ⋅ r ⋅ dr =
0
r
π ⋅ G ⋅ R4
∫0 G ⋅ l ⋅ ∆ϕ ⋅ r ⋅ 2 ⋅ π ⋅ r ⋅ dr = 2 ⋅ l ⋅ ∆ϕ
R
(2.3)
In Formel (2.3) ist die Scherspannung τ mit Hilfe des Hooke’schen Gesetzes durch das Produkt aus Schubmodul G und Scherwinkel γ ersetzt
worden. Im Fall des tordierten Stabes ist dieser Winkel zwischen der
verdrehten Faser und ihrer ursprünglichen Orientierung zu messen. Der
Schwerwinkel ist, wie man sich anhand einer Zeichnung leicht überlegen kann, proportional zum Verdrehungswinkel ∆ϕ, wobei der Proportionalitätsfaktor gleich dem Quotienten aus dem zugehörigen Radius
und der Profillänge l ist. Formel (2.3) zeigt, dass die Drehimpulsstromstärke linear mit der Verdrehung des Vollzylinders zunimmt. Der zugehörige Proportionalitätsfaktor heisst Winkelrichtgrösse. Diese darf in
Anlehnung an das Federgesetz auch Drehfederkonstante genannt werden.
? Kontrollfragen
18.)
19.)
20.)
21.)
22.)
Ein Riementrieb, bei dem beide Scheiben gleich gross sind, wird statisch vorgespannt. Die xAchse zeige in Richtung der beiden Riementeile. Wie fliesst bei dieser Anordnung der Impuls?
Wie der Drehimpuls?
Ein dünnwandiges Rohr sei auf Torsion belastet. Dabei wird Drehimpuls in achsialer Richtung
transportiert. Die z-Achse des Koordinatensystems zeige in Richtung des Drehimpulstransportes.Wie fliesst die z-Komponente des Impulses durch den Rohrmantel? Wie verlaufen die
Ströme der beiden andern Sorten?
Bei der Biegung fliesst der Drehimpuls in der Wirkebene drin und bei Torsion normal zu dieser. Was ist bei diesen beiden Belastungsfällen zu den begleitenden Impulsströmen zu sagen?
Wie lautet das Hooke’sche Gesetz bei Scherung?
Wie gross ist die Winkelrichtgrösse bei einem Vollzylinder? Konsultieren Sie die Formel (2.3)!
Rotationsmechanik
Seite 35
2.6 Drehimpulsströme und Drehmomente
Ein Drehimpulsstrom ist nicht einfach ein anderes Wort für Drehmo- Ströme werden an einer orienment. In diesem Abschnitt wollen wir beide Begriffe präzisieren und ge- tierten Referenzfläche gemesgeneinander abgrenzen. Dazu ein Beispiel. Einem Schwungrad werde sen
über eine verdrehte Welle Drehimpuls zugeführt. Der Drehimpulsstrom
hat eine bestimmte Stärke, die an jeder beliebigen Stelle der Welle bestimmt werden kann. Bei jedem Strom muss nun die Referenzfläche und
die zugehörige Orientierung, bezüglich der die Stromstärke gemessen
worden ist, angegeben werden. Die Orientierung der Fläche entscheidet
über das der Stromstärke zuzuordnende Vorzeichen. Sobald ein Strom
hin und her fliesst, kommt man um eine klare Regelung der Vorzeichenfrage nicht mehr herum. So hebt man in der Elektrizitätslehre die Orientierung der Referenzfläche speziell noch mit einem Bezugspfeil hervor.
Mit Drehmoment wird jede Einwirkung auf einen starren Körper, die das Drehmoment als systembedessen Rotation beeinflusst, bezeichnet. Das Drehmoment beschreibt zogene Drehimpulsstromstärke
die Drehimpulsstromstärke bezüglich eines ausgewählten Systems. Da
ein positives Drehmoment natürlicherweise eine Drehimpulszufuhr anzeigen soll, muss die Systemoberfläche nach innen orientiert werden.
Erst durch diese Vorzeichenregel werden Drehmoment und Drehimpulsstromstärke zu synonymen Begriffen.
Wird eine Antriebswelle in Gedanken vom Schwungrad getrennt, ist die actio gleich reactio
Schnittfläche durch zwei entgegengesetzt gleiche grosse Drehmomente
zu ergänzen. Das eine Drehmoment gehört dann zum System Schwungrad und das andere ist der Welle zuzuordnen. Weil bei jeder Schnittfläche zwei Körper aufeinanderstossen, können Drehmomente immer nur
paarweise gebildet werden, wobei jedes Paar in Anlehnung an die Translationsmechanik auch mit actio gleich reactio bezeichet werden darf.
M
IL
Fig. 2. - 11: Ein zufliessender
Drehimpulsstrom ergibt ein
positives Drehmoment. Dieses wird mit einem kreisförmigen Pfeil dargestellt.
Die Vektoreigenschaft des Drehimpulses soll, solange wir uns mit Be- Vorzeichen und Darstellung
wegungen in der Ebene beschäftigen, kein Thema sein. Mit dieser Einschränkung bleibt auch das Drehmoment eine rein skalare Grösse, deren
Vorzeichens von der Wahl des positiven Drehsinns abhängt. Ist der
Drehsinn gegen den Lauf der Uhr gerichtet, führt jedes Drehmoment,
das in diesem Sinne wirkt, dem System Drehimpuls zu. Einem im Uhrzeigersinn wirkenden Drehmoment ist dann ein negatives Vorzeichen
zuzuweisen. Die Wirkrichtung des Drehmomentes wird üblicherweise
mit einem Pfeil dargestellt.
Seite 36
Rotationsmechanik
? Kontrollfragen
Das im Dreibackenfutter einer Drehbank eingespannte Werkstück (Trägheitsmoment 2 kg·m2)
wird in drei Sekunden auf eine positive Drehzahl von 1440 Umdrehungen pro Minute
gebracht. Wie stark ist der mittlere Drehimpulsstrom während des Anfahrvorganges?
24.) Durch eine tordierte Welle fliesst ein konstanter Drehimpulsstrom. Schneiden Sie die Welle in
drei Teile, zeichnen sie alle wirkenden Drehmomente ein und erklären Sie anhand dieses Beispiels die Begriffe Gleichgewicht sowie Wechselwirkung.
25.) Auf ein anfänglich ruhendes Schwungrad wirkt ein Drehmoment im Uhrzeigersinn ein. Die
positive Drehrichtung sei anders herum definiert. Was passiert mit dem Drehimpulsinhalt des
Rades?
26.) Überlegen Sie sich beim zweiarmigen Hebel (Fig. 2.-3), wie der Drehimpuls durch diese einfache Maschine hindurchfliesst. Die positive Drehrichtung ist durch das Koordinatensystem
festgelegt.
23.)
2.7 Die Kraft und das begleitende Drehmoment
das Drehmoment hängt nicht
mit der Drehachse zusammen
reibungsfrei und
aufrecht
die Kräfte bestimmen die
Beschleunigung des MMP
Die Wirklinie einer Kraft verlaufe quer durch einen starren Körper hindurch. Wie gross ist das zugehörige Drehmoment? Sie müssen sich nun
gründlich von der archimedischen Vorstellung lösen, dass ein Drehmoment gleich dem Produkt aus Kraft und Abstand zur Drehachse ist. Die
Drehachse ist eine rein kinematische Grösse, die, wie wir im nächsten
Beispiel sehen werden, keinen direkten Einfluss auf das dynamische Geschehen hat.
Den ersten Teil des nun folgenden Beispiels haben Sie schon bei einer
Kontrollfrage kennengelernt. Auf einen Vollzylinder (Masse 10 kg,
Massenträgheitsmoment 0.0125 kgm2, Radius 5 cm), der reibungsfrei
auf einer horizontalen Unterlage steht, wirkt über eine aufgewickelte
Schnur eine konstante Kraft von 10 N ein. Wie bewegt sich der anfänglich ruhende Körper nach fünf Sekunden?
Die Lösung einer Aufgabe aus der Mechanik stellt eine handwerkliche
Herausforderung dar. Doch statt den gesunden Menschenverstand walten zu lassen, sollte man bei mechanischen Problemen immer mit einer
gewissen Systematik vorgehen. Der professionelle Weg führt vom
Schnittbild über die Bilanzgesetze zu den Bewegungsgleichungen.Wir
stellen also zuerst ein vollständiges Schnittbild vom Körper her, d.h. wir
zeichnen alle Kräfte ein, die auf das System einwirken. In der Senkrechten halten Gewichts- und Normalkraft den Körper im Gleichgewicht.
Horizontal wirkt nur die konstant gehaltene Seilkraft ein. Diese ändert
den Impulsinhalt in jeder Sekunde um 10 Ns. Die Zylinderachse erfährt
dadurch eine Beschleunigung von 1m/s2. Folglich wird sich der Zylinder
nach fünf Sekunden mit 5 m/s nach rechts bewegen. Beachten Sie, dass
die Wirkung der Kraft, die Beschleunigung des Massenmittelpunktes,
unabhängig der Lage der Wirklinie ist. Der MMP verhält sich, wie wenn
alle Kräfte direkt auf ihn wirken würden.
Rotationsmechanik
Seite 37
x
Schnittbild
y
Fig. 2. - 12: Steht eine
Fadenspule reibungsfrei auf
einer horizontalen Unterlage, so muss sich der über
das gespannte Seil zuströImpulsstrombild mende Impuls seitwärts fliessend in der Spule verteilen.
Dies hat eine Drehimpulszufuhr zur Folge.
Der Impuls muss, da die Schnur tangential zum Mantel ausgerichtet ist, der Impuls fliesst bis zum
im Zylinder seitwärts fliessen. Nur so kann er sich gleichmässig über MMP
das System verteilen. Diese Querströmung induziert gemäss den weiter
oben gemachten Überlegungen eine Drehimpulszufuhr, deren Stärke
gleich dem Produkt aus Impulsstrom und zugehöriger Querfliessstrecke
ist. Doch wie gross ist diese seitliche Versetzung des Impulsstromes?
Um wieviel fliesst der Impuls im Zylinder drin seitwärts? Weil die Rotation um den Massenmittelpunkt weiterhin keinen Beitrag zum Impulsinhalt liefern soll, ist die gesuchte Strecke gerade gleich dem Abstand der
Wirklinie vom MMP. Wir können uns also vorstellen, dass der Impuls
zuerst bis zum MMP fliesst und von dort nach allen Seiten gleichmässig
über den Zylinder verteilt wird. Der Umstand, dass der Zylinder während dieser Phase immer schneller rotiert, hat einen Einfluss auf unsere
Überlegung.
H
eb
el
ar
m
ie
lin
irk
W
Der Impuls fliesst also von der Eintrittsstelle bis zum Massenmittel- das Drehmoment einer Kraft
punkt des starren Körpers. Deshalb darf jeder Kraft ein Drehmoment zugeschrieben werden, das gleich dem Produkt aus dem Betrag der Kraft
und dem Abstand des MMP von der Wirklinie ist. Der Massenmittelpunkt als Trägheitszentrum verkörpert damit den Ort, um den die auf einen Körper einwirkenden Kräfte eine Hebelwirkung entfalten. In der
Statik ist man freier. Solange ein Körper festgehalten wird, kann der BeKraft
zugspunkt für die Drehmomente frei gewählt werden. In der sogenannten Rotatormechanik, einer Mischung aus Tranlations- und Rotationsbe+ MMP
trachtung, muss der Bezugspunkt auf der festgehaltenen Drehachse gewählt werden. Weil diese spezielle Drehbewegung im Unterricht häufig
behandelt wird, hat sich die irrige Meinung durchgesetzt, dass das einer
Kraft zugeordnete Drehmoment etwas mit der Drehachse zu tun habe.
Gemäss der Regel von der Drehmomentenzuordnung beim starren Kör- der Bewegungszustand des
per ist in unserem Beispiel die Kraft von einem Drehmoment der Stärke Zylinders am Schluss der Ein0.5 Nm begleitet. Folglich wird dem Zylinder in den fraglichen fünf Se- wirkung
kunden 2.5 Nms Drehimpuls zugeführt. Dividiert man diesen Wert
15 m/s
durch das Massenträgheitsmoment, erhält man eine Winkelgeschwindigkeit von 200 s-1. Dies ergibt bei ruhender Zylinderachse eine Umfangsgeschwindigkeit von 10 m/s ergeben. Weil sich die Zylinderachse
5 m/s
mit 5 m/s bewegt, muss die Umfangsgeschwindigkeit mit der Translationsbewegung verrechnet werden. Die Geschwindigkeit eines Punktes
ergibt sich folglich aus der vektoriellen Addition von Relativ- und
Translationsgeschwindigkeit. Die Punkte mit der grössten Momentan-5 m/s
geschwindigkeit liegen also alle auf der Mantellinie, auf der sich das
Seite 38
Rotationsmechanik
Seil vom Zylinder löst. Diese Linie bewegt sich mit einer Geschwindigkeit, die gleich der direkten Summe aus Achsen- und der Umlaufsgeschwindigkeit ist. Nach fünf Sekunden erreicht diese Matellinie deshalb
einen Wert von 15 m/s. Die gegenüberliegenden Punkte wandert dann
mit 5 m/s in die andere Richtung, also gegen das Seil.
Die momentane Drehachse als
rein kinematische Grösse
Die momentane Drehachse, die Punktmenge, die zum jeweiligen Zeitpunkt keine Geschwindigkeit aufweist, liegt genau zwischen der Achse
und der Mantellinie, die sich im Moment mit -5 m/s bewegt. Die Drehachse liegt damit dem Seil gegenüber, aber nur auf halbem Radius vom
Zentrum entfernt. An diesem Beispiel kann man erkennen, dass die
Drehachse als rein kinematisches Objekt keinen direkten Einfluss auf
das Drehmoment nimmt.
Beispiel 6:
Ein rotierender Vollzylinder (Masse 10 kg, Massenträgheitsmoment 0.0125 kgm2, Radius 5 cm, Winkelgeschwindigkeit 50 s-1) wird liegend auf eine horizontale Ebene abgesetzt. Nach kurzer Zeit rollt die Walze
ohne zu rutschen auf der Fläche ab. Wie schnell bewegt sich dann die Walzenachse?
Lösung 6:
Sobald die Mantelfläche der Walze die Unterlage berührt, wirkt diese mit
einer Kraft ein, die in einen Normal- und einen Gleitreibungsanteil zerlegt
werden kann. Die Normalkraft kompensiert die Gewichtskraft, so dass in
vertikaler Richtung Gleichgewicht herrscht. Die Reibungskraft führt der
Walze Impuls zu und entzieht gleichzeitig Drehimpuls. Unabhängig vom
zeitlichen Verlauf des Reibungsvorganges sind Drehimpulsabfluss und
Impulszufuhr starr miteinander verknüpft: der total zugeflossene Impuls
multipliziert mit dem Walzenradius ergibt die Drehimpulsverminderung.
Die Rollbedingung, die den Endzustand charakterisiert, liefert eine zweite
Bedingung: bei einem rollenden Körper ist die Geschwindigkeit des MMP
gleich der Winkelgeschwindigkeit multipliziert mit dem Radius. Mit Hilfe
der Impuls-Drehimpulsverknüpfung und der Rollbedingung kann das Problem gelöst und der gesuchte Wert gefunden werden.
− ∆L = r ⋅ ∆p
→ J ⋅ (ω 0 − ω e ) = r ⋅ m ⋅ ve
ve = r ⋅ ω e
→ J ⋅ (ω 0 − ve r ) = r ⋅ m ⋅ ve
ve =
x
FN
y
FR
FG
Schnittbild
J ⋅ω0
= 0.833m / s
J r + r⋅m
Für beide Mengen darf je ein separates Flüssigkeitsbild gezeichnet werden. Dies erleichtert die Wahl der
richtigen Vorzeichen von Geschwindigkeit und Winkelgeschwindigkeit.
die Rollreibung ist keine Kraft
Beobachtet man eine über eine horizontale Ebene rollende Walze während längerer Zeit, so stell man fest, dass sie immer langsamer wird.
Viele Lehrbuchautoren führen nun eine Rollreibungskraft ein, um das
allmähliche Abklingen der Rollbewegung zu erklären. Dass dies nur
eine Scheinerklärung sein kann, wird augenfällig, sobald man das
Schnittbild herstellt. Eine einzelne Kraft, die bremsend auf die Walze
einwirkt, sorgt zwar dafür, dass die Symmetrieachse des Rollkörpers
immer langsamer wird. Gleichzeitig führt das begleitenden Drehmoment dem System aber Drehimpuls zu; die Walze würde unter der Einwirkung einer „Rollreibungskraft“, die eigentlich Haftreibung heissen
sollte, immer schneller rotieren. Beim wirklichen Rollreibungsvorgang
fliessen sowohl Impuls als auch Drehimpuls ab. Dies kann am einfach-
Rotationsmechanik
Seite 39
sten durch eine kombinierte Wirkung von Haftreibungskraft und Rollreibungsmoment erklärt werden.
x
x
FN
FN
nicht korrektes
Schnittbild
y
FRR
mögliches
Schnittbild
y
MRR
FHR
FG
Fig. 2. - 13: Die Skizze zeigt
die am meisten genannte,
aber falsche Erklärung der
Rollreibung und als Alternative dazu das korrektes
Schnittbild
FG
Die Kraft und das reine Drehmoment, die gemeinsam für das Phänomen Rollreibung als kombinierte
Rollreibun verantwortlich sind, stehen in enger Beziehung zueinander. Wirkung
Beide Grössen müssen so aufeinander abgestimmt sein, dass ein fortwährendes Rollen gewährleistet bleibt. Aus den beiden Bilanzen und der
Rollreibungsbedingung folgt formal der richtige Zusammenhang zwischen Haftreibungskraft und zugehörigem Drehmoment:
kinematischeVerknüpfungen :
FHR ⋅ r − M RR = L˙ = J ⋅ ω˙
v˙MMP = r ⋅ ω˙
Rollreibungsmoment :
M RR = −( m ⋅ r + J r ) ⋅ v˙MMP
Bilanzen :
− FHR = p˙ = m ⋅ v˙MMP
Das Minuszeichen in der letzten Gleichung weist darauf hin, dass das
Rolldrehmoment dem Drehmoment der Haftreibungskraft entgegenwirkt. Das Rollreibungsdrehmoment, das einen abfliessenden Drehimpulsstrom markiert, ist betragsmässig grösser als das begleitende
Drehmoment der Haftreibungskraft. Nur so bleibt die Rollbedingung
gewährleistet.
? Kontrollfragen
27.)
28.)
29.)
30.)
31.)
Eine einzige Kraft wirke auf einen Körper mit bekannter Masse ein. Wie reagiert der Körper
auf diese Einwirkung?
Kraft gleich Masse mal Beschleunigung. Präzisieren Sie diese Aussage, bis sie auf alle möglichen Fälle zutrifft.
Eine Einwirkung sei durch einen Kraftpfeil und eine Wirklinie markiert. Wie bestimmen Sie
für diese Situation das begleitende Drehmoment, die zugehörige Drehimpulsstromsträrke?
Die Stärke der Rollreibung wird oft mit Hilfe eines Rollreibungskoeffizienten µR beschrieben.
Die zugehörige Haftreibungskraft ist dann gleich µR·FN. Berechnen Sie formal die Grösse des
zusätzlich wirkenden Drehmomentes?
Das Rollreibungsproblem lässt sich auch ohne zusätzliches Drehmoment physikalisch sauber
lösen. Dazu muss die Unterlagskraft, die Gesamtwirkung der Unterlage auf den Körper, neu
eingezeichnet werden. Wie gross ist diese Unterlagskraft und wie verläuft ihre Wirklinie?
Seite 40
Rotationsmechanik
2.8 Drehimpulsaustausch über zwei Achsen
die eigenen Wege des Drehimpulses
Drehimpuls wird oft über verschlungene Pfade transportiert. Insbesondere bei der Bewegung von isolierten Körpern kann der eigentliche
Transportweg nicht mehr angegeben werden. In diesen Fällen beschränkt man sich darauf, den Drehimpulsaustausch zwischen System
und Umgebung quantitativ zu beschreiben. Wie wir bereits gesehen haben, hängt dieser Austausch von den im Körper drin seitwärts fliessenden Impulsströmen ab. Aber auch wenn sich die Systeme als ganzes
nicht bewegen, wenn also die Massenverteilung im Raum stationär
bleibt, kann der Drehimpuls eigene Wege gehen. Dann schützt nur noch
ein klar strukturieriertes Vorgehen vor Fehlüberlegungen.
Drehimpulsströme bei einem
Getriebe
Wenden wir uns zuerst einem kleinen Beispiel zu. Zwei im Eingriff stehende Zahnräder bilden ein einfaches Getriebe. Im Stationärbetrieb
herrscht Gleichgewicht; die Summe über alle Kräfte und alle Drehmomente ist gleich Null. Der Einfachheit halber nehmen wir an, dass die
Kräfte bei den Zähnen normal zu den Radien wirken. Aus dem Schnittbild ist zu entnehmen, dass die Drehmomente, die von den Achsen her
an den beiden Räder angreifen, den gleichen Drehsinn aufweisen.
Nimmt man das beigefügte Koordinatensystem als Richtungsgeber,
muss beiden Einwirkungen ein negatives Vorzeichen zugeordnet werden, d.h. beide Drehmoment wirken gegen die Orientierung des Koordinatensystems. Dies bedeutet, dass über beide Achsen Drehimpuls
abgeführt wird. Doch wo kommt die Bewegungsmenge her?
Fig. 2. - 14: Das Schnittbild
zeigt die zwei Zahnräder
eines Getriebes. Die beiden
Achsen stehen vertikal. Deshalb erscheinen die Gewichtskräfte nicht in der
Skizze.
x
FN
M2
y
Drehimpuls fliesst auch zwischen den Achsen
FL1
M1
FN
FL2
Zur weiteren Analyse des Drehimpulsstromes fassen wir beide Zahnräder zu einem einzigen System zusammen. Damit verschwinden die
Kräfte bei den Zähnen. Übrig bleiben nur noch die beiden Drehmomente und die Lagerkräfte. Diese wirken nun auf ein gemeinsames System
ein. Das von den Lagerkräften gebildete Paar erzeugt ein Drehmoment,
das entgegengesetzt gleich gross ist wie die beiden andern Einwirkungen. Das Drehmoment der beiden Lagerkräfte markiert den gesuchten
Drehimpulszustrom. Der Drehimpuls fliesst somit nichtlokalisierbar
über die beiden Lager zu, teilt sich dann in zwei Teilströme auf und
fliesst mit unterschiedlicher Stärke über die beiden Achsen weg. Das
Getriebe als Ganzes muss folglich mit einem Drehmoment festgehalten
werden, das entgegengesetzt gleich gross ist, wie die beiden über die
Achse einwirkenden Momente.
Rotationsmechanik
Seite 41
Beispiel 7:
Eine praktisch reibungsfrei gelagerte, zylinderförmige Walze (Massenträgheitsmoment 0.2 kgm2, Durchmesser 0.2 m) rotiere mit einer Winkelgeschwindigkeit von 40 s-1 im Uhrzeigersinn um eine vertikale
Achse. Nun wird längs der Mantellinie eine zweite (Massenträgheitsmoment 0.4 kgm2, Durchmesser 0.4
m) angepresst, die anfänglich nicht rotiert. Nach einem kurzen Reibungsvorgang rollen beide Zylinder aufeinander ab. Wie schnell dreht sich dann die Walze mit dem kleineren Massenträgheitsmoment?
Lösung 7:
x
Bevor hier irgend etwas gerechnet wird, muss ein
FH
Schnittbild erstellt werden. Im Grundriss ist klar erFL2
kennbar, dass die auf die beiden Walzen einwirkenFN
den Drehmomente gleich gerichtet sind. Je nach
y
FN
Wahl der positiven Drehrichtung geben beide Körper
Drehimpuls ab oder nehmen solchen auf. Es fliesst
FL1 F
also kein Drehimpuls von der einen Walze in die
H
andere über!
Wir wählen das Koordinatensystem wie gewohnt. Die positiven Drehrichtung entspricht deshalb dem Uhrzeigersinn und die rotierende Walze enthält anfänglich einen Drehimpulsüberschuss. Aus der Skizze ist zu
entnehmen, dass die Gleitreibungskraft und die zugehörige Komponente der Lagerkraft je ein Drehmoment erzeugen. Das Verhältnis der beiden Drehmomente ist damit gleich gross wie der Quotient aus den
zugehörigen Radien. Da diese Relation unabhängig vom zeitlichen Verhalten des Anpressdruckes ist,
geben beide Walzen ihren Drehimpuls entsprechend diesem Verhältnis ab. Sobald die Walzen ihre Bewegung angeglichen haben gilt die Abrollbedingung.
ω1a
ω1e
Drehimpulsrelation :
∆L1 J1 ⋅ (ω1a − ω1e ) r1
=
=
∆L2
J2 ⋅ ( −ω 2 e )
r2
Abrollbedingung :
r1 ⋅ ω1e = − r2 ⋅ ω 2 e
ω2e eingesetzt :
J1
ω1e = ω1a ⋅
J1
J1 + J2 ⋅ (r1 r2 )2
J2
Werden die vorgegebenen Daten in die Schulssformel eingesetz, ergibt sich für die Winkelgeschwindigkeit
der anfänglich bewegten Walze ein Wert von 17.8 s-1. Die Vorzeichen bilden eine nicht zu unterschätzende
Fehlerquelle. Deshalb sollte bei komplizierteren Aufgaben unbedingt ein Flüssigkeitsbild angefertigt werden, aus dem die gegebenen Grössen zu entnehmen sind. Zudem können mit Hifle des Flüssigkeitsbildes
die zu erwartenden Werte abgschätzt werden.
? Kontrollfragen
32.)
Bei einem Riementrieb weise die eine Scheibe einen doppelt so grossen Radius wie die andere
auf. Nun werden die beiden Riemenscheiben statisch gegeneinander verdreht, bis der eine Riemen stark und der ander überhaupt nicht mehr gespannt ist.Wie fliesst dann der Drehimpuls
durch den Riementrieb hindurch?
33.) Ein Motorrad beschleunigt auf einer geraden Stecke in kurzer Zeit auf eine recht hohe
Geschwindigkeit. Schneiden Sie das Hinterrad frei und erklären Sie, wie der Drehimpuls ins
Rad hineinfliesst. Das Motorrad besitzt einen Kettenantrieb.
34.) Überlegen Sie sich, wie der Drehimpuls bei einer Ständerbohrmaschine fliesst, wenn mit dieser gerade ein Werkstück bearbeitet wird.
Seite 42
Rotationsmechanik
2.9 Die Bewegung des starren Körpers in der Ebene
das professionelle Lösungsverfahren
Die Problemstellungen aus dem Gebiet der Starrkörpermechanik erfordern ein hohes Mass an Professionalität. Deshalb sollen hier alle Einzelschritte, die zur Lösung einer Aufgabe notwendig sind, nochmals
angegeben und zudammengefasst werden. Die meisten Aufgabe der Mechanik lassen sich mit dieser Strategie lösen. Analysieren Sie die einzelnen Schritte aufmerksam und prägen Sie sich die zugehörigen Ideen ein.
Obwohl wir uns hier nur mit ebenen Bewegungen beschäftigt haben, ist
das Rezept auch auf räumliche Problemstellungen übertragbar.
zuerst das Schnittbild zeichnen
In einem ersten Schritt muss der Körper freigeschnitten werden. Dabei
wird jede belastete Fläche von der Umwelt isoliert. Die gesamte Einwirkung auf diese Fläche ist durch einen Kraftpfeil und eventuell durch ein
zusätzliches, reines Drehmoment zu ersetzen. Der Kraftpfeil darf nachträglich noch in Komponenten zerlegt werden. Die Gewichtskraft, der
volumenmässige Impulsaustausch mit dem Gravitationsfeld, ist durch
einen zusätzlichen Pfeil zu markieren.
dann die Drehmomente
bestimmen
Beim zweiten Schritt bestimmen wir alle Drehmomente, die von den
Einzelkräften herrühren. Solange ein ebenes Probleme vorliegt, genügt
es, ein Produkt zu bilden, bei dem der Abstand des Massenmittelpunktes
von der Wirklinie mit dem Betrag der Kraft multipliziert wird. Das Vorzeichen, das jedem dieser Drehmomente zuzuweisen ist, richtet sich in
der Regel nach der Orientierung des Koordinatensystems.
dann die Bilanzgleichungen
In einem dritten Schritt formuliere man die Bilanzgleichungen. Diese
Gleichungen liefern in der Ebene drei unabhängige Beziehungen. Die
zugehörigen Inhaltsänderungsraten dürfen mit Hilfe der kapazitiven Gesetze durch die entsprechenden Beschleunigungen ersetzt werden (ein
Kapazitivgesetz verknüpft den Inhalt mit dem zugehörigen Potential).
Als Ergebnis erhält man die sogenannten Bewegungsgleichungen. Diese
verlangen, dass die Summe über alle Kräfte gleich der Masse mal die
Beschleunigung des Massenmittelpunktes ist, bzw. dass die Summe
über alle Drehmomente dem Produkt aus Massenträgheitsmoment und
Winkelbeschleunigung entspricht.
die konstitutiven Beziehungen
Das weitere Vorgehen hängt von der Problemstellung ab. Entweder sind
noch kinematischen Verknüpfungen wie etwa die Rollbedingung einzusetzen oder einfache Materialbeziehungen wie die Gleitreibung sind zu
verwenden. Bei Problemen, die aus der praktischen Erfahrung der Ingenieure stammen, erweisen sich die Systemeigenschaften oft einiges
komplexer. Da tauchen Federn mit nichtlinearen Charakteristiken auf
oder die Lagerreibung hängt gemäss einer empirisch gemessenen Kurve
von der Drehzahl und der Zeit ab.
Modellierungswerkzeuge
Je nach Fragestellung müssen die beiden Beschleunigungen noch einoder zweimal zu den entsprechenden Geschwindigkeiten oder Strecken
aufintegriert werden. Zur Analyse des kinematischen Teils einer Aufgabe sollte unbedingt ein Geschwindigkeits-Zeit-Diagramm beigezogen
Rotationsmechanik
Seite 43
werden. Bei einem Bewegungsvorgang mit zeitabhängigen Einwirkungen und nichtlinearem Systemverhalten musste früher ein vereinfachtes
Ersatzmodell gebaut werden. Heute lassen sich solche Probleme direkt
mit den marktgängigen Modellierungswerkzeugen lösen. Bedingung ist,
dass der Anwender die Grundgesetze der Mechanik beherrscht.
Beispiel 8:
Eine Metallkugel (Masse 30 kg, Radius 20 cm) wird auf eine schiefe Ebene (Neigungswinkel 45˚) abgesetzt. Für den Gleitreibungkoeffizienten darf ein mittlerer Wert von 0.2 angenommen werden. Die maximal
mögliche Haftreibung entspreche der Gleitreibungskraft. Wie bewegt sich die Kugel nach einer halben
Sekunde.
Lösung 8:
Die schiefe Ebene ist so steil, dass die Kugel nie richtig rollt. Die Tangentialkomponente der Unterlagskraft nimmt von Anfang an den Gleitreibungswert an. Aus dem Schnittbild geht hervor, dass einzig diese
Gleitreibungskraft von einem Drehmoment begleitet ist. Das Massenträgheitsmoment der Kugel kann der
Tabelle 1 entnommen werden.
FR
FN
α
FG ⋅ sin α − FR = p˙ x = m ⋅ v˙
y − Impuls :
Drehimpuls :
FN − FG ⋅ cos α = 0
FR ⋅ r = L˙ = J ⋅ ω˙
Gleitreibung :
FR = µ ⋅ FN
Trägheitsmoment : J =
x
y
FG
x − Impuls :
2
m ⋅ r2
5
Bei diesem Vorgang sind Translations- und Rotationsbewegung völlig entkoppelt. Deshalb können beide
Beschleunigungen unabhängig voneinander bestimmt werden. Mit den gegebenen Daten errechnet man für
die gesuchte Mittelpunktsgeschwindigkeit 2.78 m/s und für die Winkelgeschwindigkeit 8.67 s-1. Zur Kontrolle multipliziere man diese Winkelgeschwindigkeit mit dem Kugelradius. Dies ergibt die Geschwindigkeit, mit der die Kugel sich bewegen müsste, damit sie schlupffrei abrollen kann. Dieser Wert liegt wie
erwartet unter dem berechneten.
Beispiel 9:
Wie gross muss der Haftreibungskoeffizient in der letzten Aufgabe gewählt werden, damit die Kugel
gerade noch rollt?
Lösung 9:
Den Lösungsweg können wir bis auf eine zusätzliche Forderung, die Rollbedingung (v = ω·r), von oben
übernehmen. Die Rollbedingung ist eine geometrische Relation die auch auf die Beschleunigungen übertragen werden darf. Dazu leitet man sie nach der Zeit ab.
Algebraisch ausgewertet ergibt das Gleichungssystem für den Grenzreibungskoeffizienten einen Wert von
zwei Siebteln mal den Tangens des Neigungswinkels, der in unserem Beispiel aber gerade eins beträgt.
? Kontrollfragen
35.)
Die Bewegung eines starren Körpers soll diskutiert werden. Wie gehen Sie vor? Welche drei
Schritte sind zuerst auszuführen?
36.) Eine Kugel rollt eine schiefe Ebene hinunter. Formulieren Sie die Gleichungen, welche die
Bewegung des Körpers vollständig beschreiben.
37.) Die schiefe Ebene sei so steil, dass die Kugel nicht mehr schön abrollt. Welche Gleichungen
beschreiben nun das Verhalten des Körpes?
Seite 44
Rotationsmechanik
Zusammenfassung von Kapitel 2
Jeder rotierende Körper speichert Drehimpuls. Solange er sich in der Ebene bewegt, dürfen wir den
Drehimpus als skalare Menge, die speicher- und transportierbar ist, behandeln. Der Inhalt an Drehimpuls ist immer gleich dem Produkt aus Massenträgheitsmoment und Winkelgeschwindigkeit. Mit
der Wahl des positiven Drehsinns legen wir das Vorzeichen der Winkelgeschwindigkeit und des
gespeicherten Drehimpulses fest. Über die Drehimpulsbilanz kann die Richtung der Drehimpulsströme ermittelt werden.
Ein Körper tauscht immer dann mit der Umgebung Drehimpuls aus, wenn ein Impulsstrom in seinem
Innern seitwärts zur Bezugsrichtung fliesst. Die Austauschrate ist gleich dem Produkt aus der
Impulsstromstärke und und der Strecke, um die der zugehörige Impuls im Mittel seitwärts geflossen
ist. Dabei spielt es keine Rolle, ob der Impuls hindurchfliesst oder gespeichert wird. Im ersten Fall
führt das Schnittprinzip zu einem Kräftepaar, im zweiten zu einer Einzelkraft.
Drehimpulsstromstärken bezüglich eines Systems heissen Drehmomente. Im Gegensatz zum Drehimpulsstrom hängt das Drehmoment nicht vom Koordinatensystem und der Wahl des positiven Drehsinns ab. Aus dem oben dargelegten Zusammenhang zwischen dem Drehimpuls- und dem
Impulsaustausch kann eine Beziehung zwischen Drehmomenten und Kräften abgeleitet werden: jede
Kraft, die auf einen starren Körper einwirkt, ist von einem Drehmoment begleitet, dessen Stärke
gleich der Grösse der Kraft mal den Abstand der zugehörigen Wirklinie vom MMP ist.
Der Drehimpulstransport, der bei einem stationären Vorgang auftritt, ist lokalisierbar. Dabei sind
zwei Fälle zu unterscheiden. Ein Drehimpulsstrom, der parallel zu seiner eigenen Wirkebene fliesst,
wird von einem einzigen Impulsstromkreis berandet. Fliesst er normal zu dieser Ebene, hüllen ihn
die seitwärtsfliessenden Impulsströmen vollständig ein. Infolge des Gesetzes von den zugeordneten
Schubspannungen lösen die parallel zum Drehimpuls aber seitwärts zur eigenen Bezugsrichtung
fliessenden Impulsströme einen weiteren Transport aus, der von der dritten Sorte gebildet wird.
Diese Schubfluss genannte Erscheinung hüllt den Drehimpulstransport wirbelförmig ein. Schubspannungen oder querfliessende Impulsströme beanspruchen das durchflossene Material auf Scherung. Lässt man Drehimpuls parallel zur Wirkeben durch einen Stab fliessen, belastet dieser das
System auf Biegung. Fliesst der Drehimpuls normal zur Wirkebene, wird das durchflossene Objekt
verdreht. Bei einem Getriebe kann auch über das Gehäuse Drehimpuls ausgetauscht werden.
Der starre Körper kann bei Bewegung in der Ebene drei skalare Mengen, die beiden zugehörigen
Impulskomponenten und eine der drei Drehimpulssorten, speichern. Weil die beiden Impulssorten
einen Vektor bilden, gelten zwei Grundgesetze: die Summe über alle Kräfte legt die Beschleunigung
des MMP fest und die Summe über alle Drehmomente bestimmt die Winkelbeschleunigung. Üblicherweise löst man eine Bewegungsaufgabe mit Hilfe eines vollständigen Schnittbildes. Sobald alle
Kräfte eingezeichnet, die entsprechenden Drehmoment zugeordnet worden und ein Koordinatensystem eingeführt worden ist, lassen sich die drei Bilanzgesetze formuliern. Weitere Beziehungen wie
Rollbedingung, Gleitreibungs- oder Gravitationsgesetz können je nach Aufgabenstellung dann noch
beigezogen werden.
Kommerziell erhältlichen Modellbildungs- und Simulationswerkzeuge ermöglichen es uns, jede
bliebige Bewegungsaufgabe zu lösen. Bedingung ist nur, dass der Anwender die Mechanik versteht
und der Blick auf das Wesentliche nicht von einem immensen Formelfriedhof verstellt wird.
Rotationsmechanik
Seite 45
!? Lernzielkontrolle
Den Drehimpuls als die mengenartige Primärgrösse anerkennen.
1.)
2.)
3.)
Formulieren Sie mit Ihren eigenen Worten eine Drehimpulsbilanz.
Ein Flugzeug setzt beim Landen auf einer Betonpiste auf. Sobald die Räder die Unterlage
berühren, werden sie unsanft in Rotation versetzt. Was passiert dabei mit dem Drehimpuls?
Ein Turmspringer macht einen dreifachen Salto Mortale, bervor er ins Wasser fällt. Woher holt
er den dazu notwendigen Drehimpuls?
Das Flüssigkeitsbild eines Drehimpulsspeichers skizzieren können.
4.)
5.)
6.)
Zwei Schwungräder mit gleichem Massenträgheitsmoment sind über eine viskose Kupplung
(Kupplung mit Öl als Zwischenschicht) miteinander verbunden. Die Kupplung überträgt umso
mehr Drehimpuls, je grösser die Differenz der beiden Winkelgeschwindigkeiten ist. Anfänglich rotieren beide Räder gegeneinander. Skizzieren Sie den Bewegungsablauf im Flüssigkeitsbild.
Die Kupplung sei durch eine Torsionsfeder ersetzt worden. Wie ist die Feder ins Flüssigkeitsbild einzubauen? Wie sieht nun die Bewegung der Flüssigkeit aus?
Das Massenträgheitsmoment des einen Schwungrades sei doppelt so gross wie das des anderen. Wieder werden beide Räder so in Rotation versetzt, dass sie zum Zeitpunkt Null entgegengesetzt gleiche Winkelgeschwindigkeiten aufweisen. Beschreiben Sie, was in der Folge mit
dem Drehimpuls passiert, wenn einmal eine viskose Kupplung und ein zweites Mal eine Drehfeder die Verbindung zwischen den Schwungräder herstellt.
Wissen, dass das Drehmoment für eine Drehimpulsstromstärke bezüglich des Systems steht.
7.)
8.)
Kann ein Drehmoment übertragen werden?
Auf ein Schwungrad wirkt von der einen Seite ein uhrzeigersinnig orientiertes Drehmoment
ein. Was passiert mit dem Drehimpuls, wenn die positive Drehrichtung gegen den Lauf der Uhr
gerichtet ist?
Das Drehmoment eines Kräftepaares berechenen können.
9.) Wann bilden zwei Kräfte ein Paar?
10.) Ist das zugehörige Drehmoment gleich gross wie das Produkt aus der einen Kraft und dem
Abstand der beiden Wirklinien oder ist dieses Ergebnis noch zu verdoppeln?
Einer Kraft ein Drehmoment zuordnen können.
11.) Auf einen starren Körper wirkt eine Kraft mit praktisch punktförmiger Angriffsfläche ein. Wie
berechnet sich das begleitende Drehmoment?
12.) Wie bestimmt man das Drehmoment der Gewichtskraft im homogenen Gravitationsfeld?
Die Grundgesetze der Mechanik formulieren können.
13.)
Wir betrachten nochmals ein landendes Flugzeug. Schneiden Sie ein Rad frei und stellen Sie
die Grundgesetzte der Mechanik für dieses Rad auf.
14.) Ein Motorrad startet auf einem geraden Strassenstück. Schneiden Sie das Hinterrad frei und
stellen Sie die zugehörigen Grundgesetzte auf.
Seite 46
Rotationsmechanik
A Übungsaufgaben
Ein Schwungrad (Massenträgheitsmoment 120 kg·m2) soll in dreissig Sekunden aus dem Stillstand auf eine Drehzahl von 1800 Umdrehungen pro Minute hochgefahren werden. Wie stark
muss das einwikende Drehmoment sein, wenn für die Lagerreibung ein mittleres Drehmoment
von 15 Nm angenommen werden darf?
2.)
Ein praktisch reibungsfrei gelagertes Schwungrad (Massenträgheitsmoment 80 kg·m2) dreht
sich mit einer Winkelgeschwindigkeit von 15 rad/s in negativer Drehrichtung. Zur Zeit t = 0
beginnt ein positiv gerichtetes Drehmoment einzuwirken, das in zehn Sekunden linear von
Null auf 180 Nm anwächst und dann während weiteren zehn Sekunden konstant bleibt. Wie
gross ist die Winkelgeschwindigkeit nach 6 s, nach 10 s und nach 20 s?
3.)
Ein Karussell (Massenträgheitsmoment 25’000 kg·m2) soll in zehn Sekunden mit konstanter
Rate auf eine Drehzahl von sechs Umdrehungen pro Minute hochgefahren werden. Die gesamte Reibung kann durch ein Drehmoment dargestellt werden, das aus einem konstanten Term
der Stärke 2000 Nm und einem mit dem Quadrat der Winkelgeschwindigkeit zunehmenden
Term zusammengesetzt ist. Bei der maximalen Drehzahl erreicht das Reibdrehmoment einen
Wert von 4500 Nm. Wie starke muss das antreibende Drehmoment fünf Sekunden nach Beginn
des Beschleunigungsvorganges sein, damit der Vorgang wie gewünscht abläuft?
4.)
Zwei Rotoren sind auf einer gemeinsamen
Achse gelagert. Von links her wirkt auf das
erste Rad während fünf Sekunden ein konstantes Drehmoment von 120 Nm ein. Der
erste Rotor hat ein Massenträgheitsmoment
von 60 kg·m2 und der zweite 90 kg·m2. Zwischen den beiden drehbar gelagerten Körpern ist eine Rutschkupplung eingefügt,
welche maximal 50 Nm zu “übertragen”
vermag.
Wie gross sind die Winkelgeschwindigkeiten der beide Rotoren nach fünf Sekunden?
Wie lange dauert es dann noch, bis sie mit gleicher Drehzahl rotieren?
Wie schnell drehen sie sich schlussendlich?
5.)
Zwei Rotoren sind über eine Rutschkupplung, die einen maximalen Drehimpulsstrom von 2 Nm durchlässt, verbunden. Von
links her wirkt auf das grössere Schwungrad
(Trägheitsmoment 50 kg·m2) ein Drehmoment ein, das in zwei Sekunden von Null
auf 12 Nm anwächst und dann schlagartig
wieder auf Null geht.
Bestimmen Sie die Winkelgeschwindigkeiten der beiden Körper zwei Sekunden nach dem
Start.
Wie lange dauert es, bis beide Räder wieder die gleiche Drehzahl haben?
Wie gross ist dann die Winkelgeschwindigkeit?
25 kgm2
50 kgm 2
90 kgm2
60 kgm 2
1.)
Rotationsmechanik
6.)
0
10
m
m
Auf eine anfänglich ruhende Fadenspule (Masse 5 kg,
Massenträgheitsmoment 0.02 kg·m2), die aufrecht auf einem horizontalen Tisch steht und durch ein Luftkissen in
der Schwebe gehalten wird, wirkt eine konstante Kraft
von 5 N ein. Der Wickelradius der Schnur, über den die
Kraft angreift, beträgt 5 cm.
Bestimmen Sie die Geschwindigkeit des Spulenzentrums
nach 4 Sekunden Einwirkzeit.
Wie schnell bewegen sich dann die Punkte mit der grössten Geschwindigkeit?
Wo liegen die Punkte, die im Moment stillstehen?
Seite 47
50 mm
7.)
Eine Kugel (Masse 5 kg, Massenträgheitsmoment 0.005 kg·m2, Radius 5 cm) rollt eine schiefe
Ebene (Neigungswinkel 30˚) hinunter.
Wie gross sind die Beschleunigung des MMP und die Winkelgeschwindigkeit?
Mit welcher Haftreibungskraft wirkt die Unterlage auf die Kugel ein?
8.)
Eine Fadenspule (r1 = 15 cm, r2 = 9 cm, Masse 9 kg,
Massenträgheitsmoment 0.05 kg·m2) wird mit einem Faden (Fadenkraft 80 N) auf einer schiefen
Ebene (Neigungswinkel 30˚) hinaufgezogen. Dabei
schliessen Ebene und Faden einen Winkel von 10˚
ein. Der Haftreibungskoeffizient ist gross genug,
um ein Rutschen zu verhindern.
Wie gross ist die Beschleunigung der Spulenachse?
Wie gross ist die von der Unterlage her einwirkende Haftreibungskraft?
9.)
50˚
Ein Fadenspule (Masse 15 kg, Aussenradius 12 cm,
30˚
Wickelradius 10 cm, Massenträgheitsmoment 0.09
kg·m2) liegt auf einer horizontalen Ebene. Das freie
Ende des Fadens zeige vertikal nach oben.
Wie stark wird der Mittelpunkt der Walze beschleunigt, wenn an der Schnur mit 70 % der Gewichtskraft gezogen wird und der Gleitreibungskoeffizient für die Grenzschicht FadenspuleUnterlage 0.3 beträgt?
10.) Eine Kugel (Radius 25 cm, Masse 500 kg, Massenträgheitsmoment 12.5 kg·m2) wird auf eine
steil abfallende Rampe (Steigung 150%) abgesetzt. Der Gleitreibungskoeffizient betrage 0.2.
Wie gross sind die Geschwindigkeit des Massenmittelpunktes und die Winkelgeschwindigkeit
nach 0.5 s?
Mit welcher Rate ändert die Kugel ihren Drehimpulses?
11.) Eine Walze (Masse 8 kg, Radius 3 cm, Massenträgheitsmoment 0.0036 kg·m2) liegt auf einem
horizontal ausgerichteten Brett. Der Haftreibungskoeffizient für die Grenzschicht Walze-Brett
betrage 0.3.
Mit welcher maximalen Beschleunigung darf das Brett horizontal weggezogen werden, ohne
dass der Zylinder zu rutschen anfängt?
Wie gross ist dann die Winkelbeschleunigung der Walze?
Seite 48
Rotationsmechanik
12.) Das Brett in Aufgabe 11 werde mit einer Beschleunigung von 10 m/s2 horizontal weggezogen.
Wie gross ist nun die Beschleunigung der Walzenachse?
13.) Auf zwei waagrechten, parallel ausgerichteten Trägern liegt
ein Metallzylinder (Masse 10 kg, Radius 5 cm, Massenträgheitsmoment 0.0125 kg·m2), dessen Achse normal zu den beiden Führungsschienen steht. Um den Zylinder ist zudem ein
biegsames Seil geschlungen, an dessem Ende eine konstante,
nach unten gerichtete Kraft von 40 N vertikal einwirkt.
Wie gross ist die Beschleunigung der Zylinderachse, wenn der
Körper ohne zu gleiten abrollt?
Wie gross ist die Haftreibungskraft?
14.) An einer homogenen Walze (Masse 4 kg, Radius 3 cm,
Massenträgheitsmoment 0.0018 kg·m2), die auf zwei
horizontalen Schienen aufliegt, hängt ein zweiter Körper (Masse 2 kg).
Bestimmen Sie die Mittelpunktsbeschleunigung der
Walze kurz nach dem Start.
Wie gross ist die Kraft, mit der die Unterlage dann auf
die Walze einwirkt?
4 kg
2 kg
15.) Ein Fadenspule (Masse 3 kg, Massenträgheitsmoment 0.003 kg·m2)
rollt an zwei Schnüren ab, die über den grösseren Umfang (Radius 5
cm) gewickelt sind. Ueber dem Mittelteil der Spule (Radius 2 cm) ist
gegenläufig eine weitere Schnur gewickelt, an dem ein zweiter Körper
(Masse 1 kg) hängt. Nun wird das Ganze aus der Ruhe heraus gestartet.
Mit welcher Winkelgeschwindigkeit dreht sich die Spule, wenn sich
der Körper um 5 cm abgesenkt hat?
Wie gross ist dann die Seilkraft auf den unteren Körper?
16.) Ein rotierender Zylinder (Masse 50 kg, Radius 15 cm, Massenträgheitsmoment 0.5625 kg·m2) Drehzahl 450 Umdrehungen pro Minute)
wird sanft auf eine horizontale Unterlage abgesetzt. Der Zylinder wird
sich infolge der Reibung wegbewegen. Welche Geschwindigkeit kann
die Zylinderachse unter diesen Umständen maximal erreichen?
1 kg
17.) Beim Kegeln landet die Kugel (Masse 4 kg, Radius 10 cm, Massenträgheitsmoment 0.01
kg·m2) ohne zu rotieren mit einer Geschwindigkeit von 5 m/s sanft auf der Bahn.
Nach welcher Zeit rollt die Kugel und wie schnell bewegt sich dann deren MMP? Für den
Gleitreibungskoeffizienten nehmen wir 0.25 an.
18.) Eine mit 10 Umdrehungen pro Sekunde rotierende Kugel (Masse 5 kg, Radius 10 cm, Massenträgheitsmoment 0.016 kg·m2) wird sanft auf eine schiefe Ebene (Neigung 20˚) abgesetzt. Die
Kugel rotiere genau in Richtung des Gefälles. Für die Gleitreibung kann ein Koeffizient von
0.5 angenommen werden.
Mit welcher Beschleunigung beginnt sich die Kugel längs der Ebene hinunterzubewegen?
Wie gross ist dann die Winkelbeschleunigung?
Wie lange dauert es, bis die Kugel rollt?
Rotationsmechanik
Seite 49
19.) Ein Zylinder (Masse 12 kg, Durchmesser 10 cm, Massenträgheitsmoment 0.015 kg·m2) rollt
auf einer horizontalen Ebene ab. Sein Impulsinhalt nimmt in fünf Sekunden von 36 Ns auf 35
Ns ab.
Wie gross ist die Haftreibungskraft?
Wie gross ist seine Winkelbeschleunigung?
Um welchen Betrag nimmt sein Eigendrehimpuls ab?
Wieso kann das Phänomen Rollreibung nicht auf eine “Rollreibungskraft” reduziert werden?
20.) Ein dünner Holzring (Durchmesser ein Meter, Masse 200 g, Massenträgheitsmoment 0.05 kg·m2) wird mit einer Geschwindigkeit
von 3 m/s und einer gegenläufigen Drehzahl von 80 Umdrehungen
pro Minute aufrecht und knapp über dem Boden fortgeworfen. Nach
kurzer Zeit rollt er entweder in Bewegungsrichtung oder in Drehrichtung davon.
Wie gross sind dann Winkel- und Mittelpunktsgeschwindigkeit?
3 m/s
80 U/min
21.) Zwei Rotoren sind auf je einer vertikalen Achse frei drehbar gelagert. Der erste (Radius 25 cm,
Masse 800 kg, Massenträgheitsmoment 25 kg·m2) drehe mit 15 Umdrehungen pro Sekunde
und der zweite (Radius 15 cm, Masse 300 kg, Massenträgheitsmoment 3.375 kg·m2) sei in Ruhe. Nun werden die beiden Zylinder längs einer Mantellinie mit 150 N aneinandergedrückt.
Der Gleitreibungskoeffizient für die Grenzschicht betrage 0.4.
Berechnen Sie die Kräfte, die während der Gleitphase vom Lager her auf die Rotoren einwirken.
Wie gross sind die Winkelgeschwindigkeiten der beiden Rotoren am Schluss der Gleitphase?
Wieviel Drehimpuls ist abgeflossen? Wie konnte er abfliessen?
22.) Ein Satellit, der frei um die Erde fällt, bestehe aus einem dünnen Stab (Länge zwei Meter,
Masse 10 kg) und einer Scheibe (Durchmesser ein Meter, Masse 25 kg). Scheibe und Stab sind
gegeneinander frei drehbar gelagert und können mit Hilfe eines Motors in gegenseitige Rotation versetzt und über eine Bremsvorrichtung wieder gestoppt werden. Der Motor “erzeugt” ein
konstantes Drehmoment von 0.2 N·m und die Bremse wirkt mit 0.4 N·m. Der anfänglich nicht
rotierende Stab muss nun um 90˚ gedreht werden.
Berechnen Sie die kürzest mögliche Drehzeit.
Um wieviel hat sich dann die Scheibe gedreht?
Welche maximale Leistung gibt der Motor bei diesem Vorgang ab?
300
200
23.) Auf die nebenstehend skizzierte, ruhende Fadenspule
(Masse 4 kg, Massenträgheitsmoment 0.1 kg·m2, Abrollradius 30 cm, Wickelradius 20 cm) wirkt eine Kraft ein, die
in vier Sekunden linear von Null auf 20 N anwächst. Die
maximal mögliche Haftreibung beträgt 10 N. Sobald die
Spule rutscht, nimmt die Gleitreibung auch den Wert von
10 N an.
Wann beginnt die Spule zu gleiten?
Wie schnell bewegt sich die Körperachse nach diesen vier
Sekunden?
Seite 50
24.) Um einen Zylinder (Masse 8 kg, Radius 5 cm, Massenträgheitsmoment 0.01 kg·m2) sei so ein Seil geschlungen, dass es nicht rutschen kann. Das andere
Ende des Seils ist an einem Klotz (Masse 5 kg) befestigt, der auf einer schiefen Ebene (Neigungswinkel
45˚) zu gleiten (Gleitreibungskoeffizient 0.3) vermag. Die Seilumlenkführung sei reibungsfrei.
Wie gross muss die Kraft F sein, damit die Symmetrieachse des Zylinders immer auf gleicher Höhe
bleibt?
Wie gross ist dann die Seilkraft auf den Zylinder?
Rotationsmechanik
5 kg
25.) Um einen Zylinder (Masse 8 kg, Radius 5 cm) sei
so ein Seil geschlungen, dass es nicht rutschen
kann. Das andere Ende des Seils ist an einem
Klotz (Masse 6 kg) befestigt, der auf einer horizontalen Ebene zu gleiten (Gleitreibungskoeffizient 0.3) vermag. Die Seilumlenkführung weist
praktisch keine Reibung auf.
Mit welcher Beschleunigung wird der Körper
weggezogen?
Wie gross ist die Winkel- und Mittelpunktsbeschleunigung des Zylinders?
26.
8 kg
F
6 kg
Ueber eine starr fixierte, also nicht drehbare Umlenkrolle, kann ein
Seil reibungsfrei gleiten. An einem Ende des Seiles hängt ein Klotz
(Masse 7 kg). Das andere Ende ist um einen homogenen Zylinder
(Masse 7 kg, Radius 5 cm, Massenträgheitsmoment 0.00875 kg·m2)
geschlungen und so befestigt, dass das Seil nicht rutschen kann.
Wie gross ist die Beschleunigung des Klotzes?
8 kg
7 kg
7 kg
27.) Eine Vollkugel (Masse 30 kg, Radius 20 cm, Massenträgheitsmoment 0.48 kg·m2) rollt aus der
Ruhe heraus eine schiefe Ebene hinunter.
Wie gross ist die Beschleunigung des Berührpunktes eine halbe Sekunde nach dem Start?
28.) Wie stark muss an der nebenstehend skizzierten Fadenspule
(Masse 5 kg, Aussenradius 10 cm, Wickelradius 8 cm, Massenträgheitsmoment 0.02 kg·m2) unter einem Winkel von 45˚
gezogen werden, damit diese zu rutschen anfängt? Für den
Haftreibungskoeffizient der Grenzschicht Spule-Boden kann
der Wert 0.5 gesetzt werden?
Wie gross ist dann die Beschleunigung des Massenmittelpunktes?
Welche Beschleunigung erfährt dann das gerade Seilstück?
45˚
Rotationsmechanik
Seite 51
29.) Ein Holzwürfel (Kantenlänge 10 cm, Masse 800 g) wird auf eine schiefe Ebene (Neigungswinkel 50˚) abgesetzt. Falls der Körper infolge zu grosser Reibung haften bleibt, kippt er über die
untere Kante. Ist die Haftreibung dagegen sehr klein, beginnt er wegzurutschen ohne zu kippen. Wie gross muss der Gleitreibungskoeffizient sein, damit der Würfel gerade noch rutscht
ohne sich über die untere Kante wegzudrehen?
30.) Ein nahezu reibungsfrei gelagertes Schwungrad (Massenträgheitsmoment 120 kg·m2) dreht
sich mit einer Winkelgeschwindigkeit von 12 rad/s. Zur Zeit t = 0 beginnt ein positiv gerichtetes Drehmoment einzuwirken, das harmonisch anschwillt und wieder abklingt. Die Amplitude
misst 800 Nm und Schwingungsdauer beträgt 24 Sekunden. Das Drehmomenten-Zeit-Verhalten kann damit durch die folgende Funktion beschrieben werden?
M = M0 ⋅ cos(
2 ⋅π
⋅ t)
T
mit M0 = 800 Nm und T = 24 s
Wie schnell dreht sich das Rad nach einer Einwirkzeit von sechs Sekunden?
31.) Ein nahezu reibungsfrei gelagertes Schwungrad (Massenträgheitsmoment 40 kgm2) werde
über eine Welle in Bewegung versetzt. Die Welle sei elastisch und weise eine Winkelrichtgrösse (Drehfederkonstante) von 18’000 Nm auf. Der zufliessende Drehimpuls führt zu einer
messbaren Verdrehung der Welle. Die Messung ergibt, dass der Verdrehungswinkel wie folgt
zunimmt
∆ϕ = ∆ϕ 0 ⋅ sinh(α ⋅ t ) mit ∆ϕ 0 = 0.15 und α = 2 ⋅ π 36s
Wie schnell dreht sich das Rad fünf Sekunden nach Beginn der Einwirkung?
32.) Das Bewegungsverhalten von zwei Schwungrädern, die über eine viskose Kupplung miteinander verbunden sind, soll mit dem Modellbildungs- und Simulationsprogramm STELLA nachvollzogen werden. Anfänglich rotiere das grössere Rad (Massenträgheitsmoment 60 kg·m2) mit
einer Drehzahl von 400 Umdrehungen pro Minute. Zu diesem Zeitpunkt steht das kleinere Rad
(Massenträgheitsmoment 40 kg·m2) immer noch still. Die Stromstärke des durch die Rutschkupplung fliessenden Drehimpulsstromes wachse linear mit der Differenz der Winkelgeschwindigkeit, wobei für den Proportionalitätsfaktor ein Wert von 5 Nm/s angenommen
werden kann. Die Lagerreibungen sind vorderhand nicht zu berücksichtigen.
Bauen Sie das zugehörige STELLA-Modell auf und berechnen Sie die beiden Winkelgeschwindigkeits-Zeit-Funktionen für die ersten dreissig Sekunden.
Auf das grössere Rad wirke noch ein externes Drehmoment ein, das harmonisch hin- und herschwingt. Die Amplitude betrage 50 Nm und die Schwingungsdauer sei zwei Sekunden. Wie
sehen nun die zugehörigen Funktionen auf?
Wie können die beiden Lagerdrehmomente von je 5 Nm ins Modell eingebaut werden?
33.) Die Kupplung in Beispiel 32.) werde durch eine elastische Welle (Winkelrichtgrösse 600 Nm)
ersetzt. Es wirkt kein äusseres Moment und die Lagerreibungen sind nicht zu berücksichtigen.
Bauen Sie das zugehörige STELLA-Modell auf und berechnen Sie die beiden Winkelgeschwindigkeits-Zeit-Funktionen für die ersten dreissig Sekunden.
Auf das grössere Rad wirke noch ein externes Drehmoment ein, das harmonisch hin- und herschwingt. Die Amplitude betrage 50 Nm und die Schwingungsdauer sei zwei Sekunden. Wie
sehen nun die zugehörigen Funktionen auf?
Seite 52
Rotationsmechanik
3. Energie in der Rotationsmechanik
Seile, Stangen, Hebel, Wellen und viele andere mechanische Geräte sind in der Lage, Energie zu
transportieren. Dazu müssen sie mechanisch belastet und gleichzeitig bewegt werden. Die Energieströme selber sind wie der Drehimpulstransport nicht direkt nachweisbar. Sie müssen mit einem speziellen Verfahren aufsgepürt werden. Erst dann kann man sie graphisch in einem sogenannten
Energiestromdiagramm darstellen. Um ein solches Stromdiagramm herzustellen schneidet man die
einzelnen Bauteil zuerst frei, berechnet dann mit Hilfe der Geschwindigkeit die Leistungen aller
Kräfte und interpretiert zuletzt alle Leistungen als Energieströme. Positive Leistungen ergeben einen
Energiezufluss, negative weisen auf einen Energieverlust hin. Bei rotierenden Bauteilen muss das
Verfahren erweitert werden, denn ein System kann Energie auch zusammen mit dem Drehimpuls
austauschen. Dabei muss nicht unbedingt auch noch ein resultierender Impulsstrom fliessen. In solchen Fällen ist die entsprechende Leistung gleich dem Produkt aus Drehmoment und Winkelgeschwindigkeit der Angriffsfläche.
Dieses Kapitel soll aufzeigen, wie die Energie mit dem Drehimpuls zusammenhängt. Analog zur
Hydraulik, zur Translationsmechanik oder zur Elektrizitätslehre darf der Energiestrom über ein
Potential mit dem Drehimpulsstrom verknüpft werden. Die Rolle des Potentials wird diesmal von
der Winkelgeschwindigkeit übernommen. Gemäss dem allgemeinen Energie-MengentransportSchema legt das Bezugssystem über die Winkelgeschwindigkeit die Stärke des zugeordneten Energiestromes fest. Die Zuordnung ist nicht ganz so willkürlich wie bei der Translation; d.h. bei der
Rotation gibt es so etwas wie einen ruhenden Raum. Ein Bezugssystem, das gegenüber der Erde
ruht, hebt sich klar von allen rotierenden Systemen ab.
Ein Drehimpulsstrom der in einer Kupplung oder in einer verdrehbaren Welle eine Winkelgeschwindigkeitsdifferenz durchfliesst, setzt Energie um: wächst die Winkelgeschwindigkeit längs des Transportweges an, nimmt der Drehimpuls Energie auf; fällt der Strom von einer hohen zu einer tiefen
Winkelgeschwindigkeit, setzt er Energie frei. Diese prozessorientierte Betrachtungsweise lohnt sich,
sobald weder Drehimpuls gespeichert wird, noch der zugehörige Strom sich verzweigt. Da in den
meisten Fällen keine oder nur eine der beiden Bedingungen erfüllt ist, muss häufig auf diese Sicht
der Dinge verzichtet werden. Dann ist der Weg über das Schnittbild mit anschliessender Leistungsberechnung immer noch der sicherste.
Rotierende Körper speichern zusätzlich Energie. Diese sogenannte Rotationsenergie kann rechnerisch infolge ihrer engen Verbindung mit dem Drehimpuls vom Rest der im System sonst noch
gespeicherten Energie abgespalten werden: die Rotationsenergie ist der Teil der Systemenergie, der
freigesetzt wird, sobald der Drehimpuls vollständig ans Bezugssystem abfliesst. Wie aus dem Flüssigkeitsbild direkt zu entnehmen ist, darf für die Rotationsenergie das Produkt aus Drehimpuls und
halber Winkelgeschwindigkeit gesetzt werden.
In der Mechanik der starren Körper ist die Energie eine zusätzliche, nicht unbedingt explizit zu
bilanzierende Erhaltungsgrösse. Impuls- und die Drehimpulsbilanz reichen vollständig aus, um die
Bewegung eines nichtdeformierbaren Körpers berechnen zu können. Die Energiebilanz ist dann
automatisch erfüllt. Aus zwei Gründen lohnt es sich, die Energie gesondert zu betrachten. Erstens
verbindet sie die Drehmechanik mit den andern Zweigen der Physik. Zweitens lassen sich mit Hilfe
der Energie viele technisch relevante Fragestellungen eleganter und vor allem schneller beantworten
als mit Hilfe der Grundgesetze. Der zweite Punkt ist mir so wichtig, dass ich ihm ein eigenes Kapitel
widme.
Rotationsmechanik
Seite 53
Im letzten Abschnitt dieses Kapitels werden wir die wechselseitige Abhängigkeit von Impuls, Drehimpuls und Energie ausnutzen und eine allgemeine Formel zur Berechnung der Massenträgheitsmomente herzuleiten. Dazu schreiben wir die Rotationsenergie einmal zusammen mit dem Kapazitivgesetz und einmal als Summe über die kinetische Energie der Einzelteile.
! Lernziele
Einem Drehimpulsstrom einen Energiestrom zuordnen können.
Die bei einem Rotationsprozess umgesetzte Leistung berechnen können
Wissen, wie die Leistung eines Drehmomentes zu berechnen ist.
Die Rotationsenergie eines starren Körpers bestimmen können.
Aus einem Schnittbild ein Energiestromdiagramm entwickeln können.
3.1 Der zugeordnete Energiestrom
Ein Riementrieb transportiert Energie, sobald die beiden Riementeile Transportvorgänge beim Rieungleich belastet sind und sich die Scheiben auf eine Seite drehen. Der mentrieb
unter diesen Bedingungen von einer Achse zur andern fliessende Drehimpuls, induziert, wie wir im letzten Kapitel gesehen haben, in den verschiedenen Streckenabschnitten unterschiedliche Impulsströme. Am
einfachsten präsentiert sich die Situation bei zwei gleich grossen Riemenscheiben. Der zwischen den Riemen seitwärts wandernde Drehimpuls wird von einen Impulsstrom begrenzt, der energiebeladen durch
den gespannten Riemen in negative Koordinatenrichtung fliesst, um
dann über die Lager und über die ruhende Teile der Maschine wieder an
den alten Ort zurückzukehren. Die Stärke des dem Impuls zugeordneten
Energiestromes ist gleich dem Produkt aus Riemengeschwindigkeit und
Impulsstromstärke. Entscheidend für die Transportrichtung der Energie
ist das Vorzeichen der Geschwindigkeit; dieses legt fest, ob die Energie
mit oder gegen den Impuls fliesst.
x
v=0
y
Energiestrom
Impulsstrom
v<0
Der Impuls transportiert nun nicht nur Energie, sondern induziert, wie
schon erwähnt, einen Drehimpulstrom. Die zugehörige Stromstärke
lässt sich entweder aus dem Schnittbild einer Scheibe oder direkt aus
dem Impulsstrombild bestimmen. Bei der ersten Vorgehensweise findet
man durch freischneiden der einen Riemenscheibe ein Kräftepaar, das
aus der Riemenkraft und der zugehörigen Komponente der Lagerkraft
Fig. 3. - 1: Beim laufenden
Riementrieb kann der Energiestransport dem Impulsstrom zugeordnet werden. In
der skizzierten Anordnung
fliessen Impuls und Energie
gegeneinander, weil der belastete Teil des Riemens eine
negative
Ge-schwindigkeit
aufweist.
Impuls-, Drehimpuls- und
Energiestransport
Seite 54
Rotationsmechanik
gebildet wird. Das begleitende Drehmoment berechnet sich dann als
Produkt aus Riemenkraft und Scheibenradius. Der zweite Weg führt
über das Impulsstrombild. Aus diesem Bild ist zu entnehmen, dass der
Impuls um den Radius der Scheibe seitwärts fliesst. Für die Stärke des
mitgeführten Drehimpulsstromes ergibt dies ebenfalls den Wert des Produktes aus Stromstärke und Scheibenradius.
der zugeordnete Energiestrom
Nun soll die Energie statt dem Impuls- dem Drehimpulstransport zugeordnet werden. Dazu schreiben wir die Formel für den dem Impuls zugeordneten Energiestrom hin und ersetzen die Geschwindigkeit des
Riemens durch Winkelgeschwindigkeit der Scheibe mal zugehörigem
Radius
IW = v ⋅ I p = ω ⋅ I L
(3.1)
Fliesst der Drehimpuls über die Achse in die erste Riemenscheibe hinein
oder von der zweiten weg, gilt die Zuordnung (3.1) weiterhin. Dies lässt
sich entweder indirekt aus der Energie- und Drehimpulserhaltung oder
direkt aus dem lokalen Zusammenhang herleiten.Um die erstgenannte
Herleitung kurz zu skizzieren, wenden wir uns nochmals dem einfachen
Getriebe zu, das zur Hauptsache aus zwei Zahnrädern besteht.
Fig. 3. - 2: In der oberen
Achse des Getriebes fliesst
Drehimpuls weg und Energie
zu; in der unteren werden
beide Grössen abgeführt. Die
Energiestromstärke ist gleich
dem Produkt aus Drehimpulsstromstärke und der
Winkelgeschwindigkeit. Ist
die Winkelgeschwindigkeit
positiv, fliesst die Energie mit
dem Drehimpuls; im umgekehrten Fall laufen die
Transporte gegeneinander.
Transportvorgänge beim
Getriebe
y
z
Energiestrom
x
Drehimpulsstrom
x
Energiestrom
Drehimpulsstrom
In den beiden Achsen des zweirädrigen Getriebes fliesst, je nach Wahl
des Koordinatensystems, Drehimpuls zu oder weg. Treten keine nennenswerten Lagerreibungen auf, muss das Verhältnis der zugehörigen
Stromstärken, das Verhältnis der beiden Drehmomente, gleich sein wie
der Quotient aus den beiden Zahnradradien. Nur unter dieser Bedingung
herrscht Gleichgewicht, nur so läuft das Getriebe stationär. Für die Winkelgeschwindigkeit gilt genau das Gegenteil. Das Produkt aus Drehzahl
und zugehörigem Radius muss für beide Räder gleich gross sein, damit
beide Räder auf dem Berührkreis der Zähne die gleiche Geschwindigkeit aufweisen. Multipliziert man nun für beide Achsen die Drehimpulsstromstärke mit der Winkelgeschwindigkeit, erhält man zweimal den
gleichen Wert. Diese Grösse beschreibt die Stromstärke der durch das
Getriebe fliessenen Energie.
Rotationsmechanik
Seite 55
Formel (3.1) kann auch direkt aus gegebenem Spannungszustand und Drehimpuls- und Energietransder Geschwindigkeitsverteilung berechnet werden. Dazu leite man zu- port bei der tordierten Welle
erst eine Formel für die mechanische Energiestromdichte her. Diese
Stromdichte, die dem Impulstransport lokal einen Energiestrom zuordnet, gewinnt man durch skalare Multiplikation des Spannungstensors
mit dem Geschwindigkeitsvektor. Bei der verdrehten Welle darf nun,
weil sich dieses Objekt näherungsweise wie ein starrrer Körper verhält,
die Geschwindigkeit an jedem Punkt durch das Kreuzprodukt aus Drehachsenabstand und Winkelgeschwindigkeit ersetzt werden. Eine Integration über alle zugeordeneten Energiestromdichten liefert dann den
gewünschten Ausdruck. Ich verzichte hier auf eine direkte Herleitung
von (3.1), weil dies ohne Tensorrechnung nur mit unnötigem Aufwand
zu bewerkstelligen ist.
Beispiel 10: Bei einem Riementrieb weise das treibende Rad einen Durchmesser von 40 cm auf und sei halb so gross
wie das angetriebene. An keiner Stelle tritt eine merkliche Reibung auf und die Masse des Riemens kann
vernachlässigt werden. Auf das antreibende Rad, das sich mit 1500 Umdrehungen pro Minute dreht, wirkt
ein Drehmoment von 20 Nm ein. Wie gross ist das Drehmoment, das auf die zweite Achse einwirkt?
Lösung 10:
Diese Aufgabe kann auf zwei verschiedene Arten gelöst werden. Entweder schneidet man beide Riemenscheiben frei und überlegt sich anhand der Gleichgewichtsbedingungen, wie gross die beiden Drehmomente sein müssen oder man hält sich an den zugeordneten Energiestrom
Bei der zweiten Vorgehensweise ist zuerst die dem Drehmoment zugeordnete Energiestromsträrke zu
bestimmen. Dann setzt man die beiden Energieströme gleich, d.h. der auf das Antriebsrad überfliessende
Energiestrom muss gleich gross sein wie der vom getriebenen Rad abfliessende. Mit Hilfe von Formel
(3.1) erhält man für den zufliessenden Energiestrom einen Wert von 3142 W. Weil sich die zweite Welle
infolge der unterschiedlich grossen Riemenscheiben nur mit halber Winkelgeschwindigkeit dreht, muss
der dort fliessende Drehimpulsstrom doppelt so gross sein, also 40 Nm. Die beiden Drehimpulsströme
fliessen auf verschiedenen Wegen durch das Getriebe hindurch und die Energie wird vom einen Strom
vollständig auf den andern umgeladen.
Die Winkelgeschwindigkeit verknüpft den Energiestrom mit dem Dreh- Vorzeichen und Invarianzen
impulstransport. Ist die Winkelgeschwindigkeit negativ, fliessen beide
Mengen gegeneinander. Diese Vorzeichenproblematik bereitet oft Mühe. Dass der Energie gegen den Träger strömt, sobald das Potential oder
das Beladungsmass negativ wird, widerspricht unserer Erfahrung im
Umgang mit konkreten Mengen. Im täglichen Leben bestehen Ströme
aus bewegter Materie, die mitsamt all ihren Eigenschaften in nur eine
Richtung transportiert wird. Die Wahl des Koordinatensystems scheint
überhaupt die ganze Strombetrachtung in Frage zu stellen. Die Freiheit
der Koordinatenwahl verträgt sich schlecht mit dem Objektivitätsanspruch der exakten Naturwissenschaft. Definiert man zum Beispiel beim
weiter oben zkizzierten Getriebe den positiven Drehsinn anders herum,
fliessen augenblicklich beide Drehimpulsströme in die entgegengesetzte
Richtung. Eine solche Stromumkehr bleibt aber ohne Folgen, weil
gleichzeitig die Winkelgeschwindigkeiten in den Achsen das Vorzeichen
wechseln. Folglich hängt die Transportrichtung der Energie nicht von
der Wahl des Koordinatensystems ab und die Energie fliesst in beiden
Fällen vom oberen zum unteren Rad.
Seite 56
Rotationsmechanik
? Kontrollfragen
1.)
2.)
3.)
4.)
Welche mechanischen Grössen werden in einem ruhenden Riementrieb transportiert?
Wie wird dem Drehimpulsstrom ein Energietransport zugeordenet?
Wann fliesst die Energie gegen den Drehimpuls?
Bei einem laufenden Riementrieb strömt Drehimpuls über die Achse ins treibende Rad hinein.
Wie fliesst dann der Drehimpuls in der andern Achse? Wie verhalten sich die beiden Stromstärken zueinander? Wie kann man erkennen, welches Rad das treibende ist?
3.2 Die Prozessleistung
Energie kann auf zwei Arten
zufliessen
Soll ein Loch gebohrt werden, kann man dies auf zwei Arten bewerkstelligen. Entweder dreht sich der Bohrer und das Werkstück bleibt an
Ort, oder der Bohrer steht still und der zu bearbeitende Körper führt die
Rotation aus. Obwohl meistens die erste Methode angewendet wird, entstehen recht viele Löcher auf die zweite Art: bei einer Drehbank drückt
man den ruhenden Bohrer in das rotierende Werkstück hinein. Vom
Standpunkt des zugeordneten Energiestromes aus gesehen, handelt es
sich um zwei verschiedene Transportvorgänge. Bei der ersten Arbeitsweise fliesst die Energie über den Bohrer ins Zerspanungsgebiet hinein,
wogegen auf der Drehbank die Energie von der Arbeitsspindel über das
Werkstück bis zur Schnittkante des Bohrers geführt wird. Betrachtet
man statt des zugeordneten Energiestromes die Prozessleistung, verschwindet der Unterschied. Bei beiden Bohrvorgängen setzt der Drehimpuls die Energie dort frei, wo eine Winkelgeschwindigkeitsdifferenz
auftritt.
der Drehimpulsstrom setzt
Energie um
Zur Berechnung der Prozessleistung gehen wir wieder von einer konkreten Situation aus. Eine Antriebswelle besitze an einer bestimmten Stelle
eine Rutschkupplung. Sobald der durchfliessende Drehimpulsstrom einen kritischen Wert erreicht hat, beginnen die beiden Kupplungsteile gegeneinander zu gleiten und begrenzen dadurch die Stromstärke des
Drehimpulses. Wir vernachlässigen das Massenträgheitsmoment der
Kupplung und sehen den Drehimpulsstrom als unverzweigt an; der
Drehimpuls fliesst also mit konstanter Stromstärke durch die ganze Anordnung hindurch. Aus der Energiebilanz folgt nun, dass die in der
Reibschicht freigesetzte Prozessleistung gleich der Differenz der beiden
zugeordneten Energieströme ist. Indem wir aus beiden Energieströmen
die Stärke des Drehimpulsstromes ausklammern, erhalten wir einen
Ausdruck, der sowohl bei der Ständerbohrmaschine als auch bei der
Drehbank gültig ist.
P = IW1 − IW2 = (ω1 − ω 2 ) ⋅ I L
Prozessleistung wird dissipiert,
gespeichert oder weitergereicht
(3.2)
Im Gegensatz zum zugeordneten Energiestrom ist die Prozessleistung
lokal nachweisbar. Sie beschreibt den momentanen Energieumsatz unabhängig vom gewählten Bezugssystem. Was mit der freigesetzten Leistung weiter passiert, hängt jedoch von den lokalen Gegebenheiten ab.
Fliesst also Drehimpuls von einer Referenzfläche mit grosser zu einer
Rotationsmechanik
Seite 57
Pr
oz
es
sle
ist
un
g
zweiten mit kleinerer Winkelgeschwindigkeit, entscheidet das dazwischenliegenden Material über die konkrete Verwendung der freigestzten
Energie. Handelt es sich um eine Rutschkupplung, wird die Energie dissipiert, also zur Produktion von Entropie verwendet. Befindet sich hingegen ein Uhrwerk an der fraglichen Stelle, wird die Energie in der
deformierten Feder mechanisch abrufbar zwischengespeichert. Die freigesetzte Energie kann aber auch von einer zweiten mengenartigen Grösse aufgenommen und weitertransportiert werden. Als Beispiel sei der
Generator erwähnt. Bei dieser Maschine gibt der Drehimpuls die zugeführte Energie an den elektrischen Stromkreis weiter. Sind zwei Prozesse über die umgesetzte Leistung gekoppelt, wie dies beim Generator der
Fall ist, kann derjenige, der die Energie freisetzt, als treibender bezeichnet werden. Der andere ist dann der getriebene.
Energiestrom 1
Drehimpulsstrom
Energiestrom 2
ω1
ω2
Fig. 3. - 3: Fliesst ein Drehimpulsstrom
von
einem
schnell rotierenden Körper
in einen zweiten, der eine
kleinere Drehzahl aufweist,
wird Energie freigesetzt.
Klein und gross sind in diesem Zusammenhang absolut
zu verstehen, d.h. eine negative Winkelgeschwindigkeit
ist kleiner als Null.
Beispiel 11: Ein Schlosser versucht eine angerostete Mutter von der Schraube zu lösen. Die rechte Hand, welche die
Mutter hält, dreht sich in einer halben Sekunde um 30˚. Die Schraube rutscht während dieser Zeit gleichsinnig in der linken, ruhenden Hand um 10˚. Wieviel Energie wird zwischen Mutter und Schraube freigesetzt, wenn der Handwerker ein konstantes “Drehmoment von 150 Nm aufwendet”.
Lösung 11:
Von der rechten Hand fliesst ein Drehimpulsstrom mit einer konstanten Stärke von 150 Nm durch die
Schraubenverbindung in die andere Hand über. Dieser Strom setzt an zwei Orten im Verhältnis 2:1 Energie
frei.
Wird die Prozessleistung mit der Prozessdauer multipliziert, erhält man die total umgesetzte Energie. Die
zugehörige Formel besagt, dass die total freigegebene Energie gleich dem Produkt aus Drehimpulsstromstärke und Differenz der beiden Drehwinkel ist. Nun müssen die gegebenen Winkel nur noch noch in Radianten umgerechnet und dann zusammen mit dem Drehmoment in diese Beziehung eingesetzt werden. Die
Auswertung der Beziehung ergibt für die Schraubenverbindung einen Wert von 52.4 J.
Das Urbild der Prozessleistung findet man bei Vorgängen im homoge- der Wasserfall als Urbeispiel
nen Gravitationsfeld. Fällt ein Fluss über ein Stauwehr hinunter, ist die eines Prozesses
dissipierte Leistung gleich der Massenstromstärke mal die Differenz der
Gravitationspotentiale. Diese Differenz darf in Anlehnung an die Elektrizitätslehre auch Gravitationsspannung genannt werden. Bei Pumpspeicherwerken beschreibt die gleiche Formel je nach Betriebsart die
minimal aufzuwendende oder maximal freisetzbare Leistung. Überträgt
man den Rotationsprozess in das konkrete Bild des Pumpwerkes, verwandelt sich wie beim Flüssigkeitsbild die Winkelgeschwindigkeit in
eine Höhe oder etwas präziser in ein Gravitationspotential. Mit dieser
Seite 58
Rotationsmechanik
Metamorphose erhalten zugeordnete Energie und Prozessleistung ein
intuitiv erfassbares Gewand. Mit dem Prozessbild kann auch die Vorzeichenfrage etwas entschärft werden. Dreht man die Bezugsrichtung um,
muss das Prozessbild an der Bezugslinie der Winkelgeschwindigkeit gespiegelt werden. Damit verwandelt sich das Gefälle in eine Steigung.
Weil gleichzeitig der Drehimpulsstrom in die andere Richtung fliesst,
bleibt die Prozessleistung invariant unter dieser Umdefinition.
? Kontrollfragen
5.)
6.)
7.)
Wann liegt ein reiner Rotationsprozess vor?
Wie berechnet sich der Energieumsatz bei einem Rotationsprozess?
Drücken Sie die Ballen Ihrer Hände fest gegeneinander. Drehen Sie dann die Arme rhythmisch hin und her. Wie fliesst bei diesem Reibvorgang der Drehimpuls? Wie fliesst der zugeordnete Energiestrom? Zeichnen Sie für zwei unterschiedliche Phasen das Prozessbild.
3.3 Die Leistung des Drehmomentes
zugeordneter Energiestrom
und Leistung eines Drehmomentes
Drehimpulsströme, die über die Systemgrenze fliessen, heissen auf das
System einwirkende Drehmomente. Fliesst Drehimpuls ins System hinein, ist das zugehörige Drehmoment eine positive Grösse. Ein Drehimpulsstrom, der den Körper verlässt, wird dagegen durch ein negativ
gerichtetes Drehmoment beschrieben. Sobald ein einzelner Körper freigeschnitten wird, heisst der dem Drehimpulsstrom zugeordnete Energiestrom Leistung eines Drehmomentes. Diese Leistung ist wie das
Drehmoment selber eine reine Bilanzgrösse und hat nur indirekt etwas
mit der im letzten Abschnitt behandelten Prozessleistung zu tun. Zugeordneter Energiestrom und Leistung eines Drehmomentes verhalten sich
zueinander wie die Drehimpulsstromstärke zum Drehmoment. Obwohl
beide Grössen weitgehend als synonym angesehen werden können, ist
beim Vorzeichen Vorsicht geboten. Die erstgenannte Grösse beschreibt
den Transport im Raum: die Richtung des Energiestromes ist über das
Vorzeichen der Winkelgeschwindigkeit mit dem Drehimpulstransport
verknüpft. Die Leistung eines Drehmomentes beschreibt hingegen den
Austausch zwischen System und Umgebung. Ihr Vorzeichen ist unabhängig von der Wahl des Koordinatensystems. Dafür ist die dem Drehmoment zugeordnete Leistung direkt mit der Energiebilanz verknüpft:
eine negative Leistung weist darauf hin, dass die Energie das System
verlässt.
Beispiel 12: Mit einer Reibahle, die sich in negative Richtung dreht, wird eine Bohrung bearbeitet. Man fertige eine
Situationsskizze an und zeichne den Drehimpuls- und den zugeordneten Energiestrom ein. Zudem überlege man sich, wie die Drehmomente einzuzeichen und die zugehörigen Leistungen zu berechnen sind.
Lösung 12:
Die negative Drehrichtung ist durch das Koordinatensystem gegeben: eine negative Drehbewegung führt
die y- in die x-Achse über. Die Stromrichtung des Drehimpulses lässt sich aus der zugehörigen Bilanzüberlegung ableiten: wäre das Werkstück frei beweglich, so würde sein Drehimpulsinhalt unter der Wirkung
der Ahle abnehmen. Der Drehimpuls fliesst deshalb von der Einspannstelle über das Werkstück und die
Ahle weg. Der zugeordnete Energiestrom nimmt in der Reibahle den umgekehrten Weg. Infolge der nega-
Rotationsmechanik
Seite 59
tiven Winkelgeschwindigkeit wird dort die Energie gegen den Drehimpulsstrom transportiert. Im Reibgebiet selber fällt der Drehimpuls von der Winkelgeschwindigkeit Null auf das negative Potential der Ahle
hinunter. Dort findet ein sogenannter Prozess statt, dort wird die Energie nachweisbar freigesetzt. Würde
man das Koordinatensystem um die x-Achse um 180˚ drehen, flösse der Drehimpuls von rechts nach links.
Weil bei dieser Wahl des Koordinatensystems die Ahle ebenfalls im positiven Drehsinn rotieren würde,
kommt die Energie aber immer noch von rechts.
z
Energie
Drehimpuls
Prozessgebiet
Drehsinn
y
Auf die Ahle und auf das Werkstück wirken je zwei entgegengesetzt gleich grosse Drehmomente ein. Die
Leistung des vom Werkstück auf die Ahle einwirkende Drehmoment ist negativ. Das Reaktionsmoment,
das von der Ahle auf das Werkstück wirkt, ist dagegen leistungsfrei. Dies bedeutet, dass die Energie wohl
aus der Reibahle austritt, aber nicht mehr ins Werkstück hineinfliesst.
Zugeordneter Energiestrom, Prozessleistung und Leistung eines Dreh- Strombild, Schnittbild und
momentes sind drei Begriffe, die alle in irgendeiner Form den Energie- Energieumsatz
umsatz beschreiben. Trotzdem dürfen wir sie nicht unbesehen
gleichsetzen. Sie unterscheiden sich sowohl in ihrer spezifischen Aussage als auch in ihrem Anwendungsgebiet. Zugeordneter Energiestrom
und Prozessleistung beschreiben den Energietransport bzw. den Energieumsatz eines einzelnen Stromes. Beide Begriffe sind universell anwendbar, da energietragende Ströme in allen Zweigen der klassischen
Physik (Hydraulik, Translations- und Rotationsmechanik, Elektrizitätslehre, sowie Thermodynamik) vorkommen. Die Leistung einer Kraft
oder eines Momentes muss erst ins Spiel gebracht werden, wenn man
sich dem einzelnen Objekt zuwendet. Dann geht es nicht mehr darum,
Aussagen über einen ganzen Transportvorgang zu machen, dann gilt es,
das Verhalten des einzelnen Gegenstandes zu beschreiben. Oft ist man
gezwungen, zuerst eine Gesamtanalyse über mehrer Objekte hinweg
vorzunehmen, um sich dann eingehend mit einem einzelnen Körper zu
berschäftigen. Damit Sie beide Darstellungsformen eingesetzten können, müssen Sie jederzeit wissen, wie man aus dem Drehimpulsstrom
ein Drehmoment gewinnt und wie man umgekehrt aus den Schnittbildern auf einen Drehimpulsstrom schliessen kann.
? Kontrollfragen
8.) Wie berechnet man die Leistung eines Drehmomentes?
9.) Wann wird die Leistung eines Drehmomentes positiv?
10.) Die Leistung eines Drehmomentes sei negativ. In welche Richtung fliesst dann die Energie?
11.) Mit welcher Einheit wird der zugeordnete Energiestrom, die Prozessleistung und die Leistung
eines Drehmomentes gemessen?
12.) Wie unterscheidet sich die Prozessleistung von der Leistung eines Drehmomentes?
13.) Wie unterscheidet sich der zugeordnete Energiestrom von der Leistung eines Drehmomentes?
Seite 60
Rotationsmechanik
3.4 Die Rotationsenergie
Rotationsenergie und Drehimpuls
Ein Körper, der in Rotation versetzt wird, nimmt zusammen mit dem
Drehimpuls auch Energie auf. Da mit zunehmender Drehzahl sowohl
der Drehimpulsinhalt als auch die Winkelgeschwindigkeit grösser wird,
wächst die Rotationsenergie stärker als die Winkelgeschwindigkeit an.
Zur Herleitung einer Formel für die Rotationsenergie schreiben wir zuerst die Drehimpuls- sowie die Energiebilanz hin
∑M
i
= L« = J ⋅ ω«
i
∑ P( M ) = W«
i
rot
(3.3)
i
In Formel (3.3) habe ich auf die allgemeindynamische Schreibweise
verzichtet und direkt das gebräuchliche Formelzeichen für Drehmoment
verwendet. Wir dürfen aber nie vergessen, dass hinter jedem Drehmoment ein Drehimpulsaustausch steht, dessen Stromstärke durch die
Grösse des Drehmomentes festgelegt ist. In (3.3) wird vorausgesetzt,
dass nur reine Drehmomente einwirken. Der Körper ändert deshalb seinen Rotationszustand ohne sich wegzubewegen.
die Änderungsrate der Rotationsenergie
Wird die erste Gleichung in (3.3) mit der Winkelgeschwindigkeit multipliziert, geht deren linke Seite in den entsprechenden Ausdruck der
zweiten Gleichung über. Folglich müssen auch die beiden rechten Seiten
identisch sein. Die Änderungsrate der Rotationsenergie ist also gleich
gross wie das Produkt aus Drehimpulsänderungsrate und Winkelgeschwindigkeit
W«rot = J ⋅ ω ⋅ ω«
(3.4)
Integriert man Formel (3.4) über die Zeit, erhält man die Änderung der
Rotationsenergie in Abhängigkeit von der Winkelgeschwindigkeit.
∆Wrot =
J
⋅ (ω 22 − ω12 )
2
(3.5)
Bewegungszustand und Trägheit legen die Bewegungsenergie fest
Die Rotationsenergie hängt wie die kinetische nur vom Bewegungszustand und von der zugehörigen Trägheit ab. Wir setzten nun voraus, dass
dieser Energieanteil beim ruhenden Körper verschwindet. Mit dieser
Normierung kann die Rotationsenergie als einfache Funktion geschrieben werden, die quadratisch mit der Drehzahl wächst. Dabei spielt es
keine Rolle, auf welche Seite sich der Körper dreht. Auch wenn er im
negativen Sinn rotiert, bleibt die Rotationsenergie trotz Drehimpulsmangel positiv. Sobald das Drehimpulsmanko durch einem vom Bezugssystem her zufliessenden Strom aufgefüllt wird, steht diese Energie als
Arbeitsvermögen wieder zur Verfügung. Wie in der Translationsmechanik ist nur die eigentliche Bewegungsmenge von der Wahl der positiven
Richtung abhängig. Im Falle einer Energiebetrachtung ist kein Unterschied mehr zwischen den beiden Drehrichtungen auszumachen.
Energie im Flüssigkeitsbild
Das Flüssigkeitsbild veranschaulicht nicht nur die Drehimpulsbilanz. Es
Rotationsmechanik
Seite 61
gibt, da die Füllhöhe identisch mit dem Potential ist, auch den Energieumsatz korrekt wieder. Wird zum Beispiel einem ruhenden Schwungrad
Drehimpuls zugeführt, so muss die ganze Menge um die halbe Endwinkelgeschwindigkeit angehoben werden. Die Rotationsenergie ist demnach gleich dem gespeicherten Drehimpuls multipliziert mit der halben
Winkelgeschwindigkeit. Dieser Aussage deckt sich mit der Formel
(3.3). Die Identität wird erkennbar, sobald der Drehimpulsinhalt durch
das Produkt aus Trägheitsmoment und Winkelgeschwindigkeit ausgedrückt wird.
ω2
ωmittel
L aus
ω1
∆ Wrot = ω mittel ⋅ Laus
ω1 + ω1
⋅ J ⋅ (ω 2 − ω 1 )
2
J
= ⋅ (ω 22 − ω 12 )
2
=
J
Fig. 3. - 4: Wird einem starren Körper eine bestimmte
Menge Drehimpuls zugeführt, so ändert sich seine
Rotationsenergie
gemäss
Formel (3.3). Der entsprechende Ausdruck lässt sich
direkt aus dem Flüssigkeitsbild heraus ableiten: die aufzuwendende Energie ist
gleich der Menge mal die
mittlere „Hubhöhe“.
Beispiel 13: Ein ruhendes Schwungrad (Massenträgheitsmoment 80 kgm2) ist über eine Rutschkupplung mit einem
Elektromotor verbunden. Der bewegliche Teil des Motors, der Rotor (Drehträgheit 20 kgm2), dreht sich
anfänglich mit einer Winkelgeschwindigkeit von 300 s-1. Während des Ankoppelungsprozesses, der vier
Sekunden dauert, wirkt über das elektromagnetische Feld ein konstantes Drehmoment von 500 Nm auf
den Rotor ein. Wieviel Energie wird in diesen vier Sekunden in der Rutschkupplung dissipiert?
Lösung 13:
Zuerst übersetzen wir den ganzen
Vorgang in ein Flüssigkeitsbild.
Der Rotor speichert anfänglich
300 /s
6000 Nms Drehimpuls . Nach vier
Sekunden drehen sich beide Körper
gleich schnell und enthalten 2000
Nms Drehimpuls mehr als vorher.
Dividiert man den totalen Inhalt
durch das gesamte Massenträg80 /s
heitsmoment, ergibt sich eine End6400 Nms
winkelgeschwindigkeit von 80 s-1,
was einer Drehzahl von 764
Umdrehungen pro Minute entspricht.
Der Drehimpuls des Schwungrades ist über die Rutschkupplung vom Rotor her zugeflossen. Wenn wir
annehmen, dass diese Drehimpulsstromstärke konstant geblieben ist, können wir die mittlere Fallhöhe von
190 s-1direkt aus dem Flüssigkeitsbild herauslesen. Das Produkt aus der ins Schwungrad hineingeflossenen
Menge und dieser Fallhöhe ergibt die freigesetzte Energie von 1.216 MJ.
Seite 62
Rotationsmechanik
Rollreibung und Energie
x
FN
y
FRR
FG
nicht korrektes
Schnittbild
Die unzutreffende Modellvorstellung, wonach beim Rollreibungsvorgang eine sogenannte Rollreibungskraft wirken soll, kann auch mit Hilfe der Energiebilanz widerlegt werden. Zeichnet man das zugehörige
Schnittbild, wird offensichtlich, dass keine der drei eingezeichneten
Kräfte eine Leistung aufweist. Folglich kann die Walze ihren Energieinhalt auch nicht ändern. Dieser Widerspruch zwischen Impulsabfluss und
Energieerhaltung wird hinfällig, sobald ein zusätzliches Reibdrehmoment eingeführt wird (vergl. Figur 2.-12). Dieses Drehmoment weist
eine nicht verschwindende, negative Leistung auf. Das zugehörige Reaktionsmoment, das Drehmoment auf die Unterlage, ist dagegen leistungsfrei. Interpretiert man alle Leistungen als Energieströme, bedeutet
dies, dass die Walze über einen Drehimpulsaustausch andauernd Energie verliert. Diese Energie wird jedoch nicht vom Boden aufgenommen,
sondern bleibt in der Zwischenschicht von Walze und Unterlage hängen.
? Kontrollfragen
14.) Wie hängt die Rotationsenergie mit dem Rotationszustand und der Drehträgheit zusammen?
15.) Wie kann aus dem Flüssigkeitsbild die Rotationsenergie herausgelesen werden?
16.) Versuchen Sie, auch die Stärke des zugeordneten Energiestromes direkt aus dem Flüssigkeitsbild herauszulesen.
17.) Zwei Schwungräder tauschen Drehimpuls aus, bis sie gleich schnell rotieren. Wie lesen Sie
aus dem Flüssigkeitsbild die dabei umgesetzte Energie heraus?
3.5 Die Berechnung von Massenträgheitsmomenten
Rotationsenergie als kinetische Energie der Einzelteile
Ein an Ort rotierender Körper enthält Drehimpuls und selbstverständlich
auch Energie. Die mit dem Drehimpuls zusammen gespeicherte Energie
kann als Rotationsenergie dem System als Ganzes zugeschrieben werden. Zerlegt man den rotierenden Körper rein gedanklich in lauter Einzelteile, ist die Bewegungsenergie entsprechend der Masse und der
Geschwindigkeit auf die Elementarkörper aufzuteilen. Weil diese Impuls speichern und sich im Gegensatz zum Ganzen auch bewegen, darf
ihre Bewegungsenergie als kinetische bezeichnet werden. Diese Zweideutigkeit ermöglicht eine direkte Berechnung der Massenträgheitsmomente. Wir schreiben dazu die Energie einmal als Rotationsenergie und
einmal als Volumenintegral über die Dichte der kinetischen Energie.
Wird nun die lokal vorhandene Geschwindigkeit durch das Produkt aus
Drehachsenabstand und Winkelgeschwindigeit ersetzt, folgt aus dem
Vergleich der entsprechenden Terme eine wichtige Formel
J 2
⋅ω
2
ρ ⋅ v2
ρ ⋅ r2 ⋅ω 2
Wkin = ∫
⋅ dV = ∫
⋅ dV
2
2
Wrot =
J = ∫ ρ ⋅ r 2 ⋅ dV
(3.6)
Rotationsmechanik
Seite 63
Gemäss Formel (3.6) trägt ein Massenelement umso mehr zum Trägheitsmoment bei, je weiter weg es sich von der Drehachse befindet. Dass
diese Abhängigkeit quadratisch sein muss, folgt direkt aus dem Vergleich der Rotationsenergie mit der kinetischen. Der Gedankengang, der
zum Integralausdruck in (3.6) geführt hat, soll nun nochmals an einem
einfachen Beispiel rekapituliert werden.
Beispiel 14: Ein dünner Holzring (Radius R, Masse m) rotiere um seine Achse. Man berechne mit Hilfe der Bewegungsenergie das zugehörige Massenträgheitsmoment.
Lösung 14:
Zur Lösung des Problems ist die Bewegungsenergie zweimal zu formulieren: ein erstes Mal als Rotationsenergie mit
unbekanntem Trägheitsmoment und ein zweites Mal als
Summe über die kinetische Energie der Einzelteile. Weil
aber alle Elemente des Ringes gleich weit von der Drehachse entfernt sind, können sie in diesem Zusammenhang zu
einem kreisenden Massenpunkt zusammengefasst werden.
Damit reduziert sich die Herleitung auf einen Vergleich von
zwei elementaren Formeln.
Das Massenträgheitsmoment von Ringen und dünnwandigen Hohlzylindern berechnet sich demnach als Masse mal
zugehöriger Radius im Quadrat.
Wrot =
J 2
⋅ω
2
Wkin, Massenpunkt =
m 2 m ⋅ r2 2
⋅v =
⋅ω
2
2
J = m ⋅ r2 =
m 2
⋅d
4
Im Prinzip sind alle Massenträgheitsmomente mit Hilfe von (3.6) bere- Massenträgheitsmomente sind
chenbar. Die Integration führt jedoch nur bei einfachen Körpern zu ei- tabelliert
nem geschlossenen Ausdruck. In Tabelle 1 sind die Trägheitsmomente
für die am häufigsten auftretenden Objekte aufgeführt.
Körper
Achse
Vollzylinder
Zylinderachse
m ⋅ r2
2
Vollzylinder
Durchmesser
m ⋅ (3 ⋅ r 2 + h 2 )
12
Hohlzylinder
Zylinderachse
m ⋅ (ra2 + ri2 )
2
Vollkugel
Durchmesser
2 ⋅ m ⋅ r2
5
Tabelle 1: Trägheitsmomente
J=
Seite 64
Rotationsmechanik
Körper
Achse
J=
Hohlkugel
Durchmesser
2 ⋅ m ⋅ (ra5 − ri5
5 ⋅ (ra3 − ri3 )
dünner Stab
Mittelsenkrechte
m ⋅l
12
dünne Kreisscheibe
Durchmesser
m ⋅ r2
4
Quader (a x b x c)
parallel zu a
m ⋅ (b 2 + c 2 )
12
Torus
Symmetrieachse
m ⋅ ( 4 ⋅ R2 + 3 ⋅ r 2 )
4
2
Tabelle 1: Trägheitsmomente
zusammensetzbare Körper
Oft lässt sich das Massenträgheitsmoment eines komplizierteren Körpers als Summe über die Beiträge der Einzelteile darstellen. Das ganze
System muss aber in tabellierte Elementarkörper zerlegbar sein. Im einfachsten Fall, dann wenn alle Teilmassenmittelpunkte auf der gemeinsamen Drehachse liegen, dürfen die Trägheitsmomente direkt addiert
werden. Ist diese Forderung nicht erfüllt, wird der Rechenaufwand etwas grösser. Wie dann eine korrekte Berechnung aussieht, werden wir
im Kapitel über den Bahndrehimpuls lernen. Zum Schluss soll noch ein
einfaches Massenträgheitsmoment ausgerechnet werden.
Beispiel 15: Man berechne das Massenträgheitsmoment eines homogenen Vollzylinders mit der Dichte ρ, der Höhe h
und dem Radius R.
Lösung 15:
Zuerst zerlegt man den ganzen Körper in lauter dünnwandige Hohlzylinders der Dicke dr. Jeder Hohlzylinder liefert nun einen Beitrag, der gleich dem Produkt aus seiner Masse und dem Quadrat des Abstandes
von der Drehachse ist. Nun muss noch über alle Hohlzylinder summiert werden, d.h. das Integral (3.6) ist
für einen zylindersymmetrischen Körper auszurechnen. Die Auswertung des Integrals ergibt die gewünschte Beziehung
R
J = ∫ ρ ⋅ r 2 ⋅ dV = ∫ ρ ⋅ r 2 ⋅ 2 ⋅ π ⋅ r ⋅ h ⋅ dr =
0
ρ ⋅ π ⋅ h ⋅ R 4 m ⋅ R2
=
2
2
Rotationsmechanik
Seite 65
? Kontrollfragen
18.) Wie gross ist der Beitrag eines Elementes mit der Masse dm zum Trägheitsmoment?
19.) Wann dürfen die Trägheitsmomente der Teilkörper einfach addiert werden?
20.) Wie gross ist das Massenträgheitsmoment eines dünnwandigen Hohlzylinders mit der Masse
m?
Zusammenfassung von Kapitel 3
Drehimpuls, der durch eine rotierende Welle fliesst, nimmt Energie mit. Der zugeordnete Energiestrom ist proportional zur Drehimpulsstromstärke und proportional zur Drehzahl; die Winkelgeschwindikeit kann damit als Energiebeladungsmass für den Drehimpulsstrom angesehen werden.
Rotiert die verdrehte Welle gegen den positiven Drehsinn, fliessen Energie und Drehimpuls gegeneinander. Der Energietransport selber ist unabhängig von der Wahl der positiven Drehrichtung, da
bei der entsprechenden Koordinatentransformation sowohl der Drehimpulstrom als auch die Winkelgeschwindigkeit ihr Vorzeichen ändern. Die Zuordnung von Energie- und Drehimpulstransport ist
nur bei starren Körpern sinnvoll. Bei allen andern Systmen schreibt man die Energie direkt dem
Impulsstrom als Leistung einer Kraft zu.
Der Drehimpuls setzt Energie frei, sobald der zugehörige Strom eine Winkelgeschwindigkeitsdifferenz durchfällt. Diese Prozessleistung ist proportional zur Fallhöhe und proportional zur Stromstärke. Soll der Drehimpuls von einem System mit kleiner Drehzahl zu einem zweiten mit grosser
befördet werden, ist die entsprechende Energie dem Drehimpulsstrom zuzuführen.
Komplexe mechanische Systeme werden oft in einfachere zerlegt. Zur weiteren Analyse stellt man
dann von jedem Körper ein Schnittbild her. Bei dieser Darstellungsweise verwandeln sich die Drehimpulsströme in Drehmomente und aus dem zugeordneten Energiestrom wird die Leistung eines
Drehmomentes. Diese Leistung berechnet sich direkt aus dem Produkt von Drehmoment und zugehöriger Winkelgeschwindigkeit. Sind Drehmoment und Winkelgeschwindigkeit gleich gerichtet,
fliesst Energie ins System hinein. Eine negative Leistung beschreibt einen Energieverlust.
Die Energie, die zusammen mit dem Drehimpuls gespeichert wird, heisst Rotationsenergie. Sie
repräsentiert also den Teil der Systemenergie, der freigesetzt wird, wenn der ganze Drehimpuls ans
Bezugssytem abfliesst. Im Falle eines negativen Drehimpulsinhaltes wird die Rotationsenergie freigesetzt, sobald der Mangel durch einen Zustrom von Drehimpuls aufgefüllt wird. Die Rotationsenergie ist immer gleich Drehimpulsinhalt mal halbe Winkelgeschwindigkeit.
Im Flüssigkeitsbild sind die wesentlichen Zusammenhänge der Rotationsmechanik direkt erkennbar:
die zugeordnete Energie erscheint als potentielle, der drehmechanische Prozess wird zu einem Vorgang im Gravitationsfeld und die Rotationsenergie entspricht der Lageenergie der gespeicherten
Flüssigkeit. Sogar die Symmetrie von Drehimpulsüberschuss und -mangel bezüglich der Rotationsenergie geht aus diesem Bild klar hervor: zwischen dem Füllen eines Reservoir und dem Leerpumpen eines Bassin besteht vom Aufwand her gesehen kein Unterschied.
Seite 66
Rotationsmechanik
!? Lernzielkontrolle
Einem Drehimpulsstrom einen Energiestrom zuordnen können.
1.)
2.)
Die Antriebswelle eines Motors soll bei einer Drehzahl von 3000 Umdrehungen pro Sekunde
eine Leistung von 25 kW übertragen. Wieviel Drehimpuls muss dann durch die Welle fliessen?
Ein Riementrieb überträgt eine Leistung von 25 kW . Die beiden Riemenscheiben sind gleich
gross und weisen einen Durchmesser von je 40 cm auf. Der Riemen bewegt sich mit 25 m/s
und im schwach belastete Teil fliesst ein Impulsstrom mit einer Stärke von 500 N. Wie gross ist
die Kraft, die auf eine Schnittfläche des stark belasteten Riementeils wirkt? Wieviel Energie
transportiert der Drehimpulsstrom insgesamt?
Die bei einem Rotationsprozess umgesetzte Leistung berechnen können
3.)
4.)
Ein an einem langen Stahldraht aufgehängter Metallzylinder werde in eine Drehschwingung
versetzt. In welcher Schwinungsphase wird im Draht drin am meisten Energie umgesetzt?
Wann ist die Prozessleistung gleich Null?
Eine Drehfeder (Winkelrichtgrösse 20 Nm) verbindet zwei Schwungräder, die auf einer
gemeinsamen Achse frei drehbar gelagert sind. Welche Grössen muss man messen, damit die
in der Feder umgesetzte Leistung berechnet werden kann?
Wissen, wie die Leistung eines Drehmomentes zu berechnen ist.
5.)
6.)
7.)
Die Formel zur Berechnung der Leistung eines Drehmomentes müssen Sie auswendig wissen.
Wie lautet Sie?
Wann ist die Leistung eines Drehmomentes positiv? Wie ist das Vorzeichen zu interpretieren?
Bei einer Kugel, die eine schiefe Ebene hinunterrollt, ist die Haftreibungskraft von einem
Drehmoment begleitet. Wie gross ist die Leistung dieses Drehmomentes? Welche Funktion übt
diese Leistung im Rahmen der Energiebilanz aus?
Die Rotationsenergie eines starren Körpers bestimmen können.
8.)
9.)
Auf ein ruhendes Schwungrad (Massentägheitsmoment J) wirke während der Zeit t ein konstantes Drehmoment M ein. Bestimmen Sie aus diesen Angeben rein formal die Rotationsenergie.
Eine Eiskunstläuferin halbiert während der Pirouette ihr Massenträgheitsmoment. Um welchen Prozentsatz nimmt dann die Rotationsenergie zu? Dissipationsvorgänge sind keine zu
berücksichtigen.
Aus einem Schnittbild ein Energiestromdiagramm entwickeln können.
10.)
Ein Zylinder rollt auf einer horizontalen Ebene langsam aus. Zeichnen Sie ein korrektes
Schnittbild, bestimmen Sie die Leistungen aller Kräfte und Drehmomente und erklären Sie
dann, wie die Energie abfliessen kann.
11.) Schneiden Sie das treibende Rad eines Skilifts frei. Bestimmen Sie dann rein formal die Leistungen aller Kräfte und Drehmomente und skizzieren Sie sodann ein Energiestrodiagramm.
12.) Die Oberfläche eines Werkstückes wird mit einem Fräser bearbeitet. Das Werkstück bewegt
sich während der Bearbeitung mit einer konstanten Vorschubgeschwindigkeit. Schneiden Sie
den Fräser frei und bestimmen Sie formal alle Leistungen. Skizzieren Sie sodann das Energiestromdiagramm.
Rotationsmechanik
Seite 67
A Übungsaufgaben
1.
Ein praktisch reibungsfrei gelagertes Schwungrad (Massenrägheitsmoment 45 kg·m2), das mit
300 Umdrehungen pro Minute rotiert, soll in 10 Sekunden auf eine Drehzahl von 1500 gebracht werden. Wie gross muss das antreibende Drehmoment nach fünf Sekunden sein, wenn
die zugehörige Leistung während der ganzen Zeitspanne konstant gehalten wird?
2.)
Auf ein Schwungrad (Massenträgheitsmoment 240 kg·m2), das sich anfänglich mit einer Winkelgeschwindigkeit von 50 s-1 dreht, wirkt während zehn Sekunden ein Drehmoment mit dem
folgenden Zeitverhalten ein
M = M0 + a ⋅ t − b ⋅ t 2
mit M0 = 50 Nm; a = 10 Nm/s; b = 1.5 Nm/s2 .
Mit welcher Winkelgeschwindigkeit dreht sich das Rad nach diesen zehn Sekunden? Für die
Lagerreibung ist ein konstanter Wert von 20 Nm einzusetzen.
Mit welcher Rate wird zwei Sekunden nach Beginn des Vorganges Energie dissipiert
Zwei Rotoren sind auf einer gemeinsamen
Achse gelagert. Von links her wirkt auf den
ersten Rotor während fünf Sekunden ein
konstantes Drehmoment von 150 Nm ein.
Der erste Rotor weist ein Massenträgheitsmoment von 60 kg·m2 aus. Die Drehträgheit
des zweiten sei 90 kg·m2. Zwischen den beiden Rotoren ist eine Rutschkupplung eingefügt, welche maximal 50 Nm zu übertragen
vermag.
Wieviel Energie wird dem Gesamtsystem zugeführt?
Wieviel Energie geht in diesen fünf Sekunden in der Rutschkupplung “verloren”?
4.)
Auf das grosse Zahnrad (45 Zähne) eines einfachen Getriebes wirkt ein Drehmoment von 60
Nm ein. Das Zahnrad dreht sich mit 400 Umdrehungen pro Minute in Richtung des Drehmomentes. Auf das kleine Zahnrad (20 Zähne) wirkt ein Drehmoment von 25 Nm ein.
Berechnen Sie die Stärken der mechanischen Energieströme.
Wieviel Energie geht pro Sekunde im Getriebe “verloren”?
Wie gross ist das Drehmoment, mit dem das Getriebegehäuse festgehalten werden muss?
5.)
Eine Eiskunstläuferin drehe sich auf der Spitze einer Kufe stehend mit zehn Umdrehungen pro
Minute. Nun halbiert Sie durch das Einziehen der Arme und des zweiten Beines ihr Massenträgheitsmoment von 7 kg·m2. Wieviel Energie muss sie dazu aufwenden?
6.)
Zwischen zwei Schwungrädern (Massenträgheitsmomente 40 kg·m2 und 25 kg·m2), die reibungsfrei
auf einer gemeinsamen Achse gelagert sind, ist eine
Drehfeder eingespannt. Wenn man nun das eine
Schwungrad festhält und das andere um 180˚ dreht,
fliesst ein Drehimpulsstrom von 150 Nm durch die
ganze Anordnung hindurch.
Wieviel Energie ist in der Feder bei einem Verdre-
25 kgm 2
40 kgm 2
60 kgm 2
90 kgm 2
3.)
Seite 68
Rotationsmechanik
hungswinkel von 360˚ gespeichert?
Die beiden Räder werden solange gegeneinander gedreht, bis die Federenden um 270˚ versetzt
sind. Mit welcher maximalen Winkelgeschwindigkeit rotiert das grössere Schwungrad, nachdem beide Körper miteinander losgelassen worden sind?
7.)
Ein Schwungrad soll eine Pumpe nach einem eventuellen Stromausfall weiter antreiben. Im
Normalbetrieb drehen sich der Elektromotor und die Pumpe mit 3000 Umdrehungen pro Minute. Der Elektromotor muss dabei mit einem Drehmoment von 18 Nm auf die Pumpe einwirken. Nach dreissig Sekunden Stromunterbruch soll die Pumpe immer noch mit mindestens
2200 Umdrehungen pro Minute rotieren. In einem Vorversuch hat man gemessen, dass das
Wasser bei dieser Drehzahl mit einem Drehmoment von 14 Nm auf das Pumpenrad einwirkt.
Wie strark ist der Energiestrom, der bei Normalbetrieb von der Achse her in die Pumpe hineinfliesst?
Wie dick muss das zylinderförmige Schwungrad (Dichte 7300 kgm2) gefertigt werden, wenn
dessen Umfangsgeschwindigkeit nicht grösser als 50 m/s werden soll?
8.)
Eine rotierende Kugel (Radius 15 cm, Masse 10 kg), die sich mit 600 Umdrehungen po Minute
dreht, wird auf den Boden abgesetzt. Nach einiger Zeit rollt sie ohne zu rutschen.
Wieviel Drehimpuls hat sie an die Erde abgegeben?
Wieviel Impuls hat sie mit der Erde ausgetauscht?
Wieviel Energie ist dabei mechanisch verlorengegangen”?
9.)
Eine Metallkugel (Radius 10 cm, Masse 30 kg) wird auf eine schief abfallende Ebene (Neigungswinkel 30˚) abgesetzt. Sie beginnt dann, ohne zu rutschen die Ebene hinunterzurollen.
Mit welcher Winkelgeschwindigkeit dreht sie sich nach einem Meter Rollstrecke?
10.) Leiten Sie eine allgemeine Formel her, die bei einem auf der schiefen Ebene rollenden Körper
die Winkelgeschwindigkeit durch die zurückgelegte Rollstrecke ausdrückt. Vergleichen Sie
diese Formel mit der entsprechenden Beziehung für den reibungsfrei gleitenden Körper. Führen Sie dann eine dimensionslose Konstante ein, mit der Sie den rollenden auf den gleitenden
Körper reduzieren können.
11.) Auf der Scheitellinie eines zylinderförmigen Daches (Radius 8 m) lässt man einen Zylinder
(Masse 10 kg, Radius 8 cm) los. Daraufhin rollt der Körper längs einer kreisförmigen Bahn
hinunter.
Wie hängt die Mittelpunktsgeschwindigkeit des rollenden Körpers mit seiner Winkelgeschwindigkeit zusammen? Leiten Sie die Formel mit Hilfe einer Zeichnung her.
Der Haftreibungskoeffizient für die Wechselwirkung zwischen Dach und Rollkörper betrage
0.5. Wie weit rollt der fragliche Körper auf dem Dach hinunter, bis er ins Rutschen kommt?
12.) Eine rotierender Zylinder (Masse 15 kg, Durchmesser 12 cm) wird mit einer Drehzahl von
1500 Umdrehungen pro Minute auf eine schiefe Ebene (Neigungswinkel 25˚) abgesetzt. Der
Zylinder rotiert so, dass sich die Walze aufwärts in Bewegung setzt. Für den Gleitreibungskoeffizienten zwischen Ebene und Walze darf ein konstanter Wert von 0.4 angenommen werden.
Wie lange dauert es, bis der Zylinder ohne zu rutschen rollt?
Wieviel Energie ist dann dissipiert worden?
13.) Ein Motorrad (Masse mit Fahrer 220 kg) fährt mit 108 km/h über ein horizontales, gerades Strassenstück. Der Motor gibt eine Leistung von 9 kW ab und die Luft wirkt mit einer resultierenden Kraft von 250 N auf das Gefährt ein.
Rotationsmechanik
Seite 69
Mit welcher Kraft und mit welchem Drehmoment wirkt die Strasse auf das hintere Rad (eine
Scheibe mit 60 cm Durchmesser und 15 kg Masse) ein, wenn beide Räder mit der gleichen
Normalkraft belastet sind und gleichviel Energie in der Abrollzone dissipieren?
Wieviel Bewegungsenergie speichert das Motorrad zusammen mit dem Fahrer? Das vordere
Rad unterscheide sich nicht wesentlich vom hinteren.
14.) Bei einem Flachriementrieb weise die treibende Riemenscheibe einen Durchmesser von 30 cm
auf und dreh sich mit 1800 Umdrehungen pro Minute. Der Durchmesser der getriebenen
Scheibe sei drei Mal grösser. Im unbelasteten Zustand sind die beide freien Riementeile mit
800 N vorgespannt.
Welche Leistung fliesst netto durch dieses Gerät hindurch, wenn die Spannkraft bei gleichbleibender Drehzahl im einen Teil auf 550 N sinkt und im andern auf 1050 N anwächst?
Wie gross sind dann die Drehmomente, mit denen die beiden Achsen auf die zugehörigen Riemenscheiben einwirken? Wie sind die beiden Drehmomente gerichtet?
15.) Zwei übereinander montierte Walzen mit horizontal ausgerichteten Achsen berühren sich längs
einer Mantellinie. Die grössere Walze (Radius 0.5 m, Massenträgheitsmoment 30 kg·m2) dreht
sich anfänglich mit 900 Umdrehungen pro Minute. Auf die kleinere Walze (Radius 0.25, Massenträgheitsmoment 10 kg·m2), welche gegenläufig mitrotiert, wirkt ein konstantes Bremsdrehmoment von 10 Nm ein. Die Haftung zwischen den Walzen sei so gross, dass diese während
des ganzen Bremsvorganges nie zu rutschen anfangen.
Wie lange dauert es, bis beide Walzen stillstehen?
16.) Ein reibungsfrei gelagerter Zylinder mit vertikaler Achse (Masse 50 kg, Radius 15 cm) dreht
sich mit 300 U/min. Nun drückt man eine zweite, ruhende Walze (Radius 30 cm, Masse 200
kg) so gegen die erste, dass sich beide Körper auf einer Matellinie berühren. Dadurch tritt eine
intensive Gleitreibung auf.
Wieviel Energie geht mechanisch verloren, bis die Walzen schlupffrei aufeinander abrollen?
Um wieviel hat sich dann der Gesamtdrehimpuls der beiden Körper geändert?
17.) Leiten Sie auf zwei Arten die Formel für das Massenträgheitsmoment eines dickwandigen
Hohlzylinders her. Das erste Mal berechnen Sie den Ausdruck direkt mit Hilfe der Basisformel
(3.6). Bei der zweiten Herleitung verwenden Sie das Massenträgheitsmoment eines Vollzylinders als Grundlage. Die Schlussformel soll die Masse und der beiden Durchmesser enthalten.
18.) Die Schnur eines grossen Jojos (Masse 2 kg, Massenträgheitsmoment 0.004 kg·m2) wird an einem horizontal ausgerichteten Stab festgebunden. Der Wickelradius beträgt 1.5 cm. Nach dem
Loslassen warten wir, bis das Jojo 1.5 m „hinuntergefallen“ ist.
Mit welcher Winkelgeschwindigkeit rotiert es dann? Die Reibungen ist nicht zu berücksichtigen.
Mit welcher Rate ändert es in diesem Moment die Bewegungsenergie?
Wie gross ist dann die Leistung der Gewichtskraft?
Seite 70
Rotationsmechanik
4. Der Bahndrehimpuls
Drehimpuls wird in jedem rotierenden System gespeichert. Trotz des offensichtlichen Zusammenhangs von beobachtbarer Bewegung und gespeicherter Menge ist der Drehimpuls selber nicht lokalisierbar. Wohl lässt sich jedem rotierenden Körper ein bestimmter Drehimpuls zuschreiben, doch
kann nicht gesagt werden, wie dieser Drehimpuls über das rotierende System verteilt ist. Eine entsprechende Dichtefunktion lässt sich höchstens bei rotationssysmmetrischen Körpern angeben.
Ähnliches ist zum Drehimpulsaustausch zu sagen. Das Drehmoment, das als Drehimpulsstromstärke
bezüglich eines Körpers definiert ist, lässt sich weder direkt messen, noch aus einer Stromdichteverteilung heraus berechnen. Das Drehmoment ist nur indirekt über die begleitenden Impulsströme
messbar: ein starrer Körper tauscht mit der Umgebung Drehimpuls aus, sobald in seinem Innern
Impulsströme quer zur Definitionsrichtung fliessen. Formel (2.1) beschreibt diesen Zusammenhang
mathematisch exakt.
Die nur bedingten Lokalisierbarkeit von Inhalt und Strom schmälert die Bedeutung des Drehimpulses in keiner Weise. Für die Mechanik des starren Körpers ist der Drehimpuls genau so wichtig wie
der Impuls; ohne Drehimpulsbilanz lässt sich die Drehbewegung eines realen Körpers nicht
beschreiben. Dieser Behauptung könnte mit dem Hinweis auf den Energiesatz widersprochen werden. Es gibt effektiv eine Gruppe von Aufgaben, die direkt mit Hilfe einer korrekt aufgestellten Energiebilanz gelöst werden können. Viele Physikkurse beschränken sich denn auch auf die rein
energetische Betrachtungsweise. Leider verbauen sie damit den Studierenden die Sicht auf die
Grundgesetze. Die Bedeutung dieser beiden Gesetze, der Impulsbilanz (die Summe über alle Kräfte
ist gleich der Aenderungsrate des Impulsinhaltes) und der davon unabhängig zu formulierende Drehimpulsbilanz (die Summe über alle Drehmomente ist gleich der Aenderungsrate des Drehimpulses),
wird denn auch meistens unterschätzt.
Die Lehrbücher, die den Drehimpuls als eigenständige Grösse thematisieren, führen ihn meistens als
reine Rechengrösse ein, die vorerst nichts mit einer Menge zu tun hat. Dieser sogenannte Bahndrehimpuls wird wie folgt berechnet: zuerst wählt man einen festen Bezugspunkt im Raum aus; dann
schreibt man jedem materiellen Punkt eine momentane Bewegungslinie zu (diese Linie ist wie die
Wirklinie eine Hilfsgerade im Raum, die durch den bewegten Massenpunkt hindurchführt und in
Richtung seiner Geschwindigkeit zeigt); das Produkt aus dem Impuls und dem Abstand der Bewegungslinie vom Bezugspunkt ergibt dann den gesuchten Bahndrehimpuls. In diesem Kapitel wollen
wir eine ähnliche Umschreibung des Drehimpulses vornehmen. Dabei beziehen wir den Drehimpuls
eines materiellen Punktes aber nicht auf einen beliebigen Ort sondern auf das Trägheitszentrum aller
beteiligten Körper. Die Gesamtmenge an Drehimpuls wird durch diese Zuordnung eindeutig festgelegt, die Eigenständigkeit des Drehimpulses bleibt gewähleistet und sein Absolutwert hängt nicht
von der Wahl eines frei zu definierenden Punktes ab.
Der erweiterte Drehimpulsbegriff erlaubt uns, das Verhalten von komplexeren Systemen zu diskutieren. Nebenbei werden wir noch eine Methode kennenlernen, mit der das Massenträgheitsmoment
eines zusammengesetzten Objektes berechnet wird. Auch der Unterschied zwischen Rotations- und
kinetischer Energie tritt mit Hilfe des geometrisch differenzierten Drehimpulsbegriffes deutlicher
hervor. Die Einzelteile eines rotierenden Körpers speichern Impuls und damit verbunden kinetische
Energie. Fasst man alle Teile zu einem Ganzen zusammen, wird der Teil der Energie, der mit dem
Drehimpuls zusammenhängt zur Rotationsenergie. Nur der Rest, der durch den Gesamtimpuls und
durch die Masse ausgedrückt werden kann, heisst weiterhin kinetisch.
Rotationsmechanik
Seite 71
! Lernziele
Den Bahndrehimpuls eines Teilkörpers berechnen können.
Bei Systemen mit mehreren Rotationsfreiheistgraden den Drehimpulsinhalt bestimmen können.
Das Massenträgheitsmoment eines Systems, das aus geometrisch einfachen Körpern zusammengesetzt ist, berechnen können.
Wissen, wie die Bewegungsenergie eines starren Körpers zu berechnen ist.
4.1 Der Drehimpuls im Niemandsland
Bisher haben wir den Drehimpuls dem rotierenden Körper selber zuge- Drehimpuls ist schlecht lokalischrieben. Die direkt messbare Winkelgeschwindigkeit und das dem sierbar
Körper zugeschriebene Massenträgheitsmoment lieferten bei allen zu
untersuchenden Problemen den richtigen Drehimpulsinhalt. Es bestand
also keine Veranlassung, weiter nachzufragen, wo genau der Drehimpuls steckt. Dieser Frage wollen wir nun nachgehen. Leider kann der
Drehimpuls nicht im gleichen Masse lokalisiert werden wie der Impuls.
Aschenbrödelhaft entzieht er sich dem Betrachter, sobald dieser wissen
will, wo genau er gespeichert ist. Betrachten wir dazu ein kleines Beispiel.
x
y
10 m
Auf einem riesigen Stahlteller (Masse 49.2 Tonnen) seien zwei Kanonen
(Masse je 400 kg) montiert, die je fünf Meter vom Zentrum entfernt parallel ausgerichtet sind. Die Stahlplatte selber werde von einem Luftkissen in der Schwebe gehalten. Feuern beide Kanonen gleichzeitig eine
Kugel von 5 kg mit einer Geschwindigkeit von 800 m/s ab, bewegt sich
die Stahlplatte mit 0.16 m/s in die entgegengesetzte Richtung. Doch was
passiert, wenn nur eine Kanone schiesst?
Fig. 4. - 1: Feuern beide
Kanonen gleichzeitig eine
Kugel ab, erleidet die reibungsfrei gelagerte Trägerplatte einen Rückstoss. Der
Impuls, der nach den Schüssen in den Kugeln steckt und
als Mangel der Platte fehlt,
ist von den Kanonen unter
der Wirkung der Explosion
getrennt worden.
Während der Schussabgabe wird durch das expandierende Gas Impuls Kanonenkugeln transportieren
von der Platte in die Kugel gepumpt. Die Platte enthält nachher einen Drehimpuls
Impulsmangel von 4’000 Ns. Sie bewegt sich folglich mit 8 cm/s in die
negative Richtung. Weil der Impuls bei der Trennung im Mittel um fünf
Seite 72
Rotationsmechanik
Meter seitwärts fliesst, wird die Platte auch noch in Rotation versetzt,
d.h. die Platte verliert bei der Schussabgabe neben dem Impuls auch
noch Drehimpuls. Falls wir dem Uhrzeigersinn das positive Vorzeichen
zuordnen und die linke Kanone in Aktion getreten ist, weist der Stahlteller nach dem Schuss einen Drehimpulsmangel von 20’000 Nms auf.
Dieser Wert berechnet sich aus dem abgegebenen Impuls und der Strekke, um die dieser Impuls in der Platte drin seitwärts geflossen ist. Aus
der Drehimpulserhaltung folgt nun, dass die Kugel die entgegengesetzt
gleiche Menge mitgenommen haben muss.
Der Drehimpuls begleitet die
Kugel
Der Schuss vom Teller ist eng mit der Dynamik der im Kapitel 2 behandelten Fadenspule verwandt. Bei der damaligen Diskussion haben wir
dem Impulsstrom einen Drehimpulstransport zugeschrieben. Mit dieser
Zuordnung konnte die an der Fadenspule zu beobachtende Veränderung
erklärt werden. Im vorliegenden Beispiel verliert der Teller sowohl Impuls als auch Drehimpuls. Beide Grössen bleiben nur erhalten, falls wir
der Kugel neben dem Impuls auch noch die richtige Menge Drehimpuls
zuschreiben. Vorderhand können keine weiteren Angaben darüber gemacht werden, wo der Drehimpuls nach der Schussabgabe zu lokalisieren ist. Seien wir deshalb vorsichtig und sagen bloss, dass die Kugel von
einem zugehörigen Drehimpuls begleitet wird.
4.2 Der begleitende Drehimpuls
Drehimpuls gleich Impuls mal
Abstand
Die vom Teller wegfliegende Kugel nimmt eine ganz bestimmte Menge
Drehimpuls mit. Dieser Drall kann, wie schon erwähnt, aus der Geometrie des Impulsstromes berechnet werden: weil der vom Teller in die Kugel beförderte Impuls vom Scheibenmittelpunkt bis zur Bahn der
wegfliegenden Kugel geflossen ist, muss der abgegangene Drehimpuls
gleich dem Produkt aus dieser Strecke und dem Kugelimpuls sein. Trifft
nun das Geschoss auf einen zweiten Teller, der genau gegenüber liegt
und mit einem Fänger versehen ist, gibt es sowohl Impuls als auch
Drehimpuls an diesen weiter. Nachher rotieren beide Teller mit entgegengesetzt gleicher Drehzahl gegeneinander
Fig. 4. - 2: Schiesst nur die
linke Kanone eine Kugel ab,
wird sowohl Impuls als auch
Drehimpuls von einem Teller
auf den andern übertragen.
x
y
der dritte Speicher
Richtig interessant wird die Geschichte jedoch erst, wenn der zweite
Teller zehn Meter seitwärts versetzt zur Bahn der Kugel aufgestellt
wird. Das Geschoss schlägt dann in den übers Kreuz plazierten Fänger
ein und versetzt den zugehörigen Teller in eine zum ersten gleichsinnige
Rotation. Damit stehen wir vor der paradoxen Situation, dass durch die
Schussabgabe zwei Körper Drehimpuls verloren haben, ohne dass ein-
Rotationsmechanik
Seite 73
ein drittes Objekt auffindbar ist, das diese mengenartige Grösse hätte
aufnehmen können. Die mögliche Existenz eines dritten Drehimpulsspeichers zwingen uns, den Drall auch ausserhalb eines materiellen Körpers zu vermuten.
Fig. 4. - 3: Trifft die Kugel
auf den gegenüberliegenden
Kugelfänger auf, weisen
beide Teller nach dem Schuss
entweder einen Ueberschuss
oder einen Mangel an Drehimpuls auf.
x
y
Nach dem Schuss weisen beide Plattformen bei entgegengesetztem Im- Drehimpuls kann von zwei
pulsinhalt einen Mangel an Drehimpuls auf. Die Bewegung der Teller Körpern gemeinsam gespeiunterscheidet sich aber noch in einem zweiten Punkt von der vorherge- chert werden
henden Situation: die Scheibenmitten laufen auf zwei getrennten Bahnen auseinander. Der fehlende Drehimpuls kann folglich nur in dieser
symmetrischen Translation drin stecken. Wir postulieren deshalb einen
weiteren Drehimpulsspeicher, der von beiden Tellern gemeinsam gebildet wird. Dieser Überspeicher muss, damit der Drehimpuls erhalten
bleibt, insgesamt 40’000 Nms enthalten. Multipliziert man den Impuls
der einen Plattform mit dem Abstand der zugehörigen Bewegungslinie
vom gemeinsamen Massenmittelpunkt, erhält man genau 20’000 Nms.
Für beide Teller zusammen ergibt dies gerade den geforderten Betrag
von 40’000 Nms. Weil sich die Verbindungslinie der beiden Tellermitten
im Uhrzeigersinn dreht, ist das zugehörige Vorzeichen positiv. Damit ist
gezeigt, dass der dritte Speicher, der durch die Massenmitten der beiden
Teller gebildet wird, den überschüssigen Drehimpuls enthält.
Fassen wir die ganze Argumentation nochmals zusammen. Nach der Drehimpuls ist eindeutig zuortSchussabgabe wird der Drehimpuls von der Kugel mitgenommen und bar
dann entweder von der zweiten Platte gespeichert oder auf die Schwerpunktsbewegung der beiden Teller aufgeteilt. Diese wahlweise Zuordnung auf verschiedene Systeme ist mit einer gewissen Willkür behaftet.
Richtig konsistent wird das Schema erst, wenn wir von Anfang an das
Ganze im Auge behalten. Bei der parallelen Anordnung fliegt die Kugel
fünf Meter zum Gesamtmassenmittelpunkt versetzt von einem Teller
zum andern. Dieser Kugel darf während der Flugphase der fehlende
Drehimpuls zugeschrieben werden. Im zweiten Beispiel fliegt die Kugel
über den Gesamtmassenmittelpunkt hinweg. Dafür verläuft die Bewegungslinie der ersten Scheibenachse am Zentrum des Gesamtsystems
Seite 74
Rotationsmechanik
vorbei. Deshalb ist der fehlene Drehimpuls nicht der Kugel sondern der
Translationsbewegung der Plattform zuzuordnen. Prallt die Kugel dann
gegen den Fänger, trennt sie im zweiten Teller nochmals die gleiche
Menge Drehimpuls auf. Dieser Drehimpuls wird einerseits in der Drehbewegung der Plattform andererseits in der zugehörigen Schwerpunktsbewegung gespeichert.
der Drehimpuls eines Punkthaufens
Fig. 4. - 4: Jeder Körper
kann einen Beitrag zum
Drehimpuls des Gesamtsystems leisten. Der entsprechende Wert ist gleich dem
Produkt aus Impuls und
Abstand der Bewegungslinie
vom Gesamtmassenmittelpunkt.
Nach diesen Analysen sind wir in der Lage, den Drehimpuls eindeutig
einem Objekt zuzuweisen. Zuerst bestimmen wir die momentane Lage
des Gesamtmassenmittelpunktes. Dann wenden wir uns den einzelnen
Teilen zu. Bewegt sich nun ein Teilkörper nicht direkt auf den MMP des
Systems zu oder von diesem weg, hilft er, Drehimpuls zu speichern. Der
zugehörige Wert, den wir Bahndrehimpuls des Körpers nennen, ist
gleich dem Produkt aus dem Impuls und dem Abstand der Bewegungslinie vom Trägheitszentrum.
p4
p1
s1
p2
s4
s2
L = ∑ pi ⋅ si
i
+ MMP
s3
p3
? Kontrollfragen
1.)
2.)
3.)
4.)
5.)
Wir vergleichen zwei Situationen miteinander: einmal steht die Kanone bei der Schussabgabe
in der Mitte der Plattform, ein andermal an deren Rand. Im zweiten Fall wird der Unterlage
auch noch Drehimpuls entzogen. Hat dies einen Einfluss auf die Impulsbilanz?
Eine Kugel fliegt von einer Plattform weg. Wie bestimmt man den Drehimpuls, den das
Geschoss mitnimmt?
Wie berechnet sich der Drehimpuls eines Planeten im Sonnensystem?
Ein Komet falle auf einer extrem elliptischen Bahn um die Sonne. Was passiert bei dieser
Bewegung mit dem Drehimpuls? Hat die unterschiedlich grosse Distanz zum Zentralkörper
und damit zum MMP des Gesamtsystems einen Einfluss auf den gespeicherten Bahndrehimpuls?
Der Mond bremst die Rotation Erde über das Gravitationsfeld andauernd ab. Umgekehrt hat
die Erde den Mond soweit gebracht, dass er uns bis auf eine kleine Nickbewegung immer die
gleiche Seite zuwendet. Durch diese Gezeitenreibung ist Energie dissipiert und Drehimpuls
freigesetzt worden. Wo ist der überschüssige Drehimpuls hingegangen?
Rotationsmechanik
Seite 75
4.3 Zusammengesetzte Körper
Eine Hantel, bestehend aus einem Verbindungsstab (Masse mS, Länge l) die Hantel als Drehimpulsspeiund zwei gleichen Kugeln (Masse m, Radius r), rotiert mit der Winkel- cher
geschwindigkeit ω um eine Achse, die normal zum Stab durch den
MMP verläuft. Wieviel Drehimpuls speichert die Hantel und wie gross
ist das zugehörige Massenträgheitsmoment? Wir könnten das Problem
mit der direkten Methode lösen. Dazu zerlegen wir die ganze Hantel gedanklich in lauter sehr kleine Stücke, ordnen jedem Einzelkörper gemäss der oben angestellten Überlegung die richtige Menge Drehimpuls
zu und berechnen dann die Gesamtmenge als Summe über alle Beiträge.
Obwohl dieser Weg rein formal gesehen die richtige Lösung liefert, verzichte ich auf eine weitere Diskussion und wähle einen mehr intuitiven
Zugang. Den Verlust an Präzision hoffe ich mit einem Gewinn an Einsicht zu kompensieren.
+ 2·r
s
Bei der rotierenden Hantel speichern alle drei Körper Drehimpuls. Zu- das Trägheitsmoment der Handem laufen die beiden Kugelmitten auf einer Kreisbahn um den Ge- tel
samtmassenmittelpunkt. Der Kreisbewegung der beiden Kugelmitten ist
nun noch je ein Drehimpuls zuzuordnen. Die Hantel besteht also aus
fünf Einzelspeichern, die alle mit der gleichen Winkelgeschwindigkeit
rotieren. Drei der fünf Speicherinhalte nennt man Eigendrehimpuls, die
beiden andern Bahndrehimpuls. Werden nun alle fünf Anteile zusammengezählt und so umgeformt, dass die Winkelgeschwindigkeit ausgeklammert werden kann, gewinnt man eine Formel, mit der das
Massenträgheitsmoment der Hantel berechnet werden kann.
L = (J Stab + 2 ⋅ J Kugel ) ⋅ ω + 2⋅ mKugel ⋅ v Kugel ⋅s
= { J Stab + 2⋅ (J Kugel + mKugel ⋅ s 2 ) }⋅ ω
J Hantel = J Stab + 2⋅ (JKugel + mKugel ⋅ s2 )
Fig. 4. - 5: Zur Berechnung
des Trägheitsmomentes einer Hantel zählen wir alle
Eigen- und Bahndrehimpulse zusammen und klammern dann die Winkelgeschwindigkeit aus.
Was für die Hantel gilt, muss auch auf alle andern Objekte zutreffen: das Massenträgheitsmoment
kann ein starrer Körper in lauter geometrisch einfache Formen zerlegt eines starren Körpers
werden, darf jedem dieser Teilsysteme ein Eigen- und ein Bahndrehimpuls zugeordnet werden. Weil die Teile zudem starr miteinander verbunden sind und die Winkelgeschwindigkeit damit zu einer Systemkonstanten wird, darf diese ausgeklammert werden. Übrig bleibt ein Ausdruck, der für jeden Teilkörper zwei Terme enthält: der erste besteht aus
dem zugehörigen Massenträgheitsmoment; der zweite ist gleich der
Masse mal das Quadrat des Massenmittelpunktsabstandes
J = ∑ ( Ji + mi ⋅ si2 )
i
(4.1)
Seite 76
Rotationsmechanik
Beispiel 16: Eine mit vier Bohrungen (Durchmesser d) versehene Scheibe (Masse
m, Radius R) rotiere um die Symmetrieachse. Die Mittelpunkte der
einzelnen Löcher liegen auf einem gemeinsamen Kreis, dessen
Radius gleich gross ist wie der Durchmesser d und halb so gross wie
der Scheibenradius R. Man berechne das Massenträgheitsmoment..
Lösung 16:
Die Lochquerschnitte decken einen Viertel der Gesamtfläche ab. Deshalb ist die Masse der ungebohrten Scheibe um einen Drittel grösser
gewesen. Zur Berechnung des gesuchten Wertes setzen wir die korrigierte Masse in Formel (4.1) ein und behandeln die Bohrungen als
Körper mit negativer Masse
J=
Mehrfachspeicher
1 m R 2 m R 2 55
4 m ⋅ R2
⋅
− 4⋅ ⋅ ⋅ + ⋅ =
⋅ m ⋅ R2
3
2
12 2 96
2 12 4
Ein starrer Körper weist überall die gleiche Winkelgeschwindigkeit auf;
er bildet einen einzigen Drehimpulsspeicher mit einem nach (4.1) zu berechnenden Trägheitsmoment. Neben diesen relativ einfachen Objekten
findet man bei vielen Maschinen Bauteile, die aus mehreren, über Gelenke oder Achsen miteinander verbundenen Elementen zusammengesetzt sind. Auf diese Baugruppen wollen wir nun unsere Überlegungen
ausdehnen. Das Gesamtsystem soll sich weiterhin nur in der Ebene bewegen können und frei sein, d.h. der Gesamtmassenmittelpunkt bildet
weiterhin das natürliche Drehzentrum. Körper, die über eine Achse starr
mit der Erde verbunden sind, werden weiter unten diskutiert.
Beispiel 17: Ein um die Erde fallender Satellit bestehe aus einem langen Stab
(Masse 10 kg, Lange 2 m und einer Scheibe (Masse 30 kg und
Radius 50 cm). Durch die Scheibenmitte geht eine starre Achse, die
mit dem Stab verbunden ist und diesen im Verhältnis 1 : 3 teilt.
Zudem können beide Teile mit Hilfe eines Motors in gegenseitige
Rotation versetzt und über eine Bremsvorrichtung wieder gestoppt
werden. Der Motor “erzeugt” ein konstantes Drehmoment von 0.2
Nm und die Bremse wirkt mit 0.4 Nm. Der anfänglich nicht rotierende Stab muss nun um den Winkel 3π gedreht werden. Man
berechne die kürzest mögliche Drehzeit.
Lösung 17:
50 cm
2m
Der Satellit besteht aus zwei getrennten Drehimpulskapazitäten. Der eine Speicher wird vom Massenträgheitsmoment der Scheibe gebildet. Der andere setzt sich aus mehreren Teilen zusammen. Die verschiedenen Beiträge zum zweiten Massenträgheitsmoment lassen sich aus der Analyse des Bewegungsablaufes
gewinnen. In der ersten Phase pumpt der Motor Drehimpuls durch die Achse hindurch, wodurch Stab und
Rad in eine gegensinnige Rotation versetzt werden. Die Mittelpunkte der beiden Körper wandern dann um
den gemeinesamen Schwerpunkt herum. Weil diese Bewegung starr an die Rotation des Stabes gekoppelt
ist, dürfen die beiden Bahndrehimpulse und der Eigendrehimpuls des Stabes als zusammengehörend
betrachtet werden. Ersetzt man die Bahngeschwindigkeit der beiden Teilmassenmittelpunkte durch das
Produkt aus Winkelgeschwindigkeit und Bahnradius, lässt sich die Winkelgeschwindigkeit ausklammern.
Der verbleibende Rest bildet dann das totale Trägheitsmoment
J2 = JStab + mStab ⋅ s12 + mScheibe ⋅ s22 = 5.208 kgm 2
Für die Distanzen zum gemeinsamen Massenmittelpunkt sind die Werte 37.5 cm und 12.5 cm eingesetzt
worden.
Rotationsmechanik
Seite 77
Der Motor kann mit einer Rate von 0.2 Nm Drehimpuls von der
Scheibe in den Stab hineinpumpen. Folglich beträgt die Winkelbeω
schleunigung 0.0384 s-2. Beim Bremsen fliesst der Drehimpuls mit
doppelter Stromstärke wieder ab. Die zweite Winkelbeschleunigung wird deshalb gegenüber der ersten betragsmässig verdoppelt.
Nach diesen Überlegeungen kann die Lösung direkt aus dem Winkelgeschwindigkeits-Zeit-Diagramm herausgelesen. Da in der
3·π
ersten Phase die Winkelbeschleunigung halb so gross ist wie während des Bremsvorganges, muss in dieser Zeit zwei Drittel der Dret
hung vollzogen werden. Die Fläche des zugehörigen Teildreiecks
im Winkelgeschwindigkeits-Zeit-Diagramm beträgt also zwei Pi.
Zusammen mit der vorher bestimmten Winkelbeschleunigung ergibt dies eine Zeitspanne von 18.09 s. Das
ganze Manöver dauert mindestens 50% länger als das Anfahren, also 27.14 s.
Überall auf der Welt fliesst Drehimpuls von System zu System und er- frei fallende Systeme sind
möglicht damit erst die vielen Rotationsbewegungen. Doch den wenig- drehimpulsisoliert
sten Menschen fällt auf, dass bei diesen Prozessen eine Erhaltungsgrösse im Spiel ist. Allzuoft bildet die Erde den einen Speicher und dominiert mit ihrem unvorstellbar grossen Trägheitsmoment das Geschehen.
Trotzdem müssen wir nicht unbedingt ein Beispiel aus der Raumfahrt
beiziehen, um die Erde als Störfaktor auszuschalten. Bei allen frei fallenden Systemen kann die Erde nur über das Gravitationsfeld Einfluss
nehmen und solange dieses Feld praktisch homogen ist, fliesst kein
Drehimpuls hindurch. Nahezu frei fallende Systeme findet man beispielsweise beim Motocross. Solange ein Motorrad durch die Luft fliegt,
hat es keine Möglichkeit mit der Erde Drehimpuls auszutauschen. Ein
Motorradfahrer kann während des Sprungs nach einer Bodenwelle weder Drehimpuls aufnehmen noch abgeben. Trotzdem muss er die Lage
seines Töffs korrigieren können, sonst droht eine harte Landung.
Beispiel 18: Wie kann ein Motorrad, das bei einem Motocrossrennen durch die Luft fliegt, in seiner Lage beeinflusst
werden? Solche Korrekturen sind notwendig, damit das Gerät bei der Landung richtig aufsetzt.
Lösung 18:
Das Motorrad besteht aus drei unabhängigen Drehimpulsspeichern. Zwei werden von den beiden Rädern
gebildet, das dritte und grösste vom Rest. Zur Berechnung des Hauptmassenträgheitsmomentes müssen die
Massen der Räder mitberücksichtigt werden, da die beiden Achsen die Bewegung des Motorrades mitmachen und somit Bahndrehimpuls speichern.
Während des Fluges kann nun der Fahrer mit Hilfe von Motor und Bermse kleinere Mengen Drehimpuls
zwischen Hinterrad und Maschine austauschen und so die Lage der Maschine korrigieren.
? Kontrollfragen
6.)
7.)
8.)
Jedes Teilsystem trägt in der Regel zweimal zum Massenträgheitsmoment eines starren Körpers bei. Wie kann man sich diese beiden Drehimpulsspeicher vorstellen?
Wann trägt ein Teilsystem nur einen Term bei?
Ein System bestehe aus zwei Stäben, die an einem Ende über eine Achse frei drehbar miteinander verbunden sind. Aus wievielen Drehimpulsspeichern ist das ganze System zusammengesetzt? Wie gross sind ihre Massenträgheitsmomente?
Seite 78
Rotationsmechanik
4.4 Bewegungsenergie
der Drehimpuls einer Hantel
Die Hantel, die wir schon im letzten Abschnitt betrachtet haben, drehe
sich mit einer vorgegebenen Winkelgeschwindigkeit um ihr Trägheitszentrum. Ihr Drehimpuls, der diese Bewegung erst ermöglicht, setzt sich
aus dem Inhalt der Kugeln und des Stabes, sowie aus dem Bahndrehimpuls der beiden Kugelmitten zusammen. Ersetzt man die Werte der beiden Bahndrehimpulse durch Bahnradius mal Impuls, schreibt für den
Impuls Masse mal Geschwindikgeit hin und drückt die Geschwindigkeit
dann durch Winkelgeschwindigkeit mal Radius aus, erhält man für jede
Bahn eine Art Massenträgheitsmoment mal Winkelgeschwindigkeit.
Diese Drehträgheit, die gleich dem Radius im Quadrat mal die Masse
ist, darf mit den eigentlichen Massenträgheitsmomenten zu einem Ganzen zusammengefasst werden. Formel (4.1) folgt also aus der Additivität
der einzelnen Drehimulsbeiträge. Diese Formel kann unabhängig von
einer Drehimpulsbetrachtung als Bildungsregel für Trägheitsmomente
zusammengesetzter Körper angesehen werden. Soweit die Theorie des
letzten Abschnittes.
die Energie einer Hantel
Eine rotierende Hantel speichert ausser Drehimpuls auch noch Energie.
Wir denken uns diese Energie bei der Hantel ebenfalls aus fünf Beiträgen zusammengesetzt: drei Energiespeicher werden vom Stab und den
beiden Kugeln infolge ihrer Rotation gebildet, zwei Zusatzterme tragen
die beiden Kugeln dank ihrer Translationsbewegung bei. Setzen wir nun
für die ersten drei Speicher die Formel für die Rotations- und für die
beiden letzten diejenige der kinetischen Energie ein, schreiben dann für
die Bahngeschwindigkeit das Produkt aus Bahnradius und Winkelgeschwindigkeit hin und fassen alle körperspezifischen Terme zusammen,
erhalten wir einen Ausdruck, der nur noch eine reine Rotationsenergie
beschreibt
W = Wrot , Stab + 2 ⋅ Wrot , Kugel + 2 ⋅ Wkin, Kugel
1
1
⋅ ( JStab + 2 ⋅ J Kugel ) ⋅ ω 2 + ⋅ 2 ⋅ mKugel ⋅ v 2
2
2
1
1
= ⋅ ( JStab + 2 ⋅ J Kugel + 2 ⋅ mKugel ⋅ s 2 ) = ⋅ J Hantel ⋅ ω 2
2
2
=
Energieformen sind Austauschformen
(4.2)
Mit der Formel (4.2) ist es uns offenbar gelungen, durch eine rein algebraische Termumformung translatorische Energie in rotatorische zu verwandeln! Aber kann man mit blosser Algebra Energie umformen? Dazu
drei Anmerkungen. Zuerst sei daran erinnert, dass Energie als physikalische Grösse nicht a priori in Formen eingeteilt werden darf. Der umgangssprachliche Gebrauch des Wortes Energie suggeriert zwar eine
Vielfalt von Formen. Deshalb stellen wir uns die Energie als Grösse vor,
die sich chamäleonartig den Gegebenheiten anpasst und durch die verschiedenen Prozesse, an denen sie beteiligt ist, langsam entwertet wird.
In der Physik ist die Energie jedoch nur eine eigenschaftslose Menge,
der innerhalb einer bestimmten Theorie eine besondere Funktion zukommt. Zudem hat Albert Einstein vor fast hundert Jahren nachgewiesen, dass Energie schwer und träge ist, dass mit Energie eigentlich
Rotationsmechanik
Seite 79
immer die Masse gemeint ist (die beiden Grössen unterscheiden sich in
ihren Einheiten, weil wir Länge und Zeitspanne verschieden messen).
Die Energie darf also genausowenig in Formen eingeteilt werden wie
die Masse oder der Drehimpuls. Einzig bei einem Austausch kann sie je
nach Prozess verschieden bezeichnet werden. Die Austauschform ergibt
sich aber nicht aus einer inhärenten Eigenschaft der Energie selber, sondern aus der zweiten Grösse, die zusätzlich mittransportiert wird. Deshalb nennen wir die mittransportierte Energie zugeordnet und bezeichnen die zweite Menge manchmal etwas salopp als Energieträger.
Die zweite Bemerkung betrifft die in einem System gespeicherte Ener- gespeicherte Energie darf nicht
gie. Aus Konsistenzgründen darf diese nicht in Formen eingeteilt, also in Formen eingeteilt werden
nicht den einzelnen Trägern zugeordnet werden. Zur Begründung dieser
Forderung ziehen wir die Prozesse am idealen Gas bei. Das System
ideales Gas kann einen Teil seiner Energie entweder zusammen mit der
Entropie als Wärme oder über einen Impulsaustausch als Arbeit abgeArbeit
ben. Diese offensichtliche Prozessabhängigkeit der beiden Energieformen Arbeit und Wärme hat dazu geführt, dass die gespeicherte Energie
in der Thermodynamik seit jeher als innere bezeichnet wird. Was für die
Wärmelehre gut ist, sollte für die ganze Physik recht sein: gespeicherte
Energie darf nicht in Formen eingeteilt werden. Solange die Energie im
System drin ist, weiss niemand, in welcher Form sie rauskommen wird.
innere
Bei einfachen Systemen muss diese Regel aber nicht unbedingt stur beEnergie
folgt werden: falls die Energie immer zusammen mit derselben Grösse
ausgetauscht wird, kann der dabei umgesetzte Teil der Gesamtenergie
(Ruhemasse) vom Rest abgespalten und als eigene Inhaltsform deklariert werden. Als Beispiel für einen solchen Monospeichers soll hier die
Wärme
ideale Feder kurz diskutiert werden. Bei einer Spiralfeder darf der Teil
der Energie, der vom hindurchfliessenden Impuls freigesetzt oder aufgenommen wird, Federenergie oder etwas allgemeiner elastische Energie
genannt werden. Diese spezielle Bezeichnung lässt sich nur bei eingeschränkter Sichtweise rechtfertigen, denn sobald man die fest eingespannte Feder in einem heissen Ofen ausglüht, geht auch die sogenannt
elastische Energie zusammen mit der Entropie in Form von Wärme weg.
Mit der dritten Anmerkung sollen die begrifflichen Schwierigekeiten im kinetische Energie, RotationsZusammenhang mit der Bewegungsenergie geklärt werden. Ein Körper, energie und Bewegungsenergie
der eine reine Translation ausführt, kann einen Teil seiner Energie nur
zusammen mit dem Impuls abgeben. Diese heisst kinetische und ist von
der Wahl des Bezusgssystems abhängig. Wir definieren nun die kinetische Energie allgemein als den Anteil, der freigesetzt wird, sobald der
gesamte Impuls ans Bezugssystem abfliesst. Diese Definition verknüpft
die kinetische Energie mit der Bewegung des Massenmittelpunktes,
denn nur wenn sich dieser Punkt bewegt, speichert das System insgesamt Impuls. Sinngemäss ist nun die Rotationsenergie als der Anteil zu
definieren, der beim Abfliessen des Drehimpulses ans Bezugssystem
freigesetzt werden kann. Unter dem Oberbegriff Bewegungsenergie fassen wir beide Energieanteile zusammen. Mit dieser Definition lasssen
sich sowohl die kinetische als auch die Rotationsenergie sauber von der
Gesamtenergie eines starren Körpers abspalten. Ob ein bestimmter Teil
Seite 80
Rotationsmechanik
der Bewegungsenergie als kinetische oder als Rotationsenergie zu bezeichnen ist, hängt direkt mit der Wahl der Systemgrenze zusammen.
Diese Problematik soll weiter unten am Beispiel der Hantel nochmals
aufgerollt werden.
zur Berechnung der Bewegungsenergie
Zur Herleitung einer Formeln für die Rotationsenergie denken wir uns
einen starren Körper, auf den ein reines Drehmoment einwirkt und an
dessen Massenmittelpunkt eine Einzelkraft angreift. Anderweitige Einwirkunge wie Gravitation oder Reibungen seien entweder kompensiert
oder eliminiert worden. Nun schreiben wir die beiden Grundgesetze der
Mechanik (Impuls- und Drehimpulsbilanz) hin, multiplizieren sie mit
der Geschwindigkeit des Massenmittelpunktes bzw. mit der Winkelgeschwindigkeit und zählen beide Beziehungen zusammen
F ⋅ vMMP + M ⋅ ω = m ⋅ vMMP ⋅ v«MMP + J ⋅ ω ⋅ ω«
(4.3)
Die Gleichung (4.3) macht eine weitere Aussage zur Energie des starren
Körpers. Weil links im Ausdruck (4.3) die beiden zugeordneten Energieströme stehen, müssen die beiden rechts aufgeführten Summanden die
Änderungsraten der beiden Energieanteile sein. Nun integrieren wir
(4.3) über die Zeit vom Ruhezustand bis zum Momentanwert. Damit erhalten wir zwei ähnliche Formeln, welche die beiden Anteile der Bewegungsenergie beschreiben
Wkin =
1
2
⋅ m ⋅ vMMP
2
Wrot =
1
⋅ J ⋅ω 2
2
(4.4)
Systemgrenze und Bewegungsenergie
Die Grösse der Bewegungsenergie hängt von der Wahl des Bezugssystems ab. Die Einteilung in einen kinetischen und einen Rotationsanteil
ist dagegen eine Frage der Systemgrenze. Diese Grenze beeinflusst den
Energieinhalt auf zwei Arten. Einerseits hängt die Bewegungsenergie
von der Zahl der eingeschlossenen Objekte ab. Andererseits kann durch
die Änderung der Systemgrösse ein Anteil in einen andern übergehen.
Zur Erläuterung dieser Aussage wenden wir uns nochmals der an Ort rotierenden Hantel zu. Grenzen wir bei diesem Gerät nur eine einzige Kugel ab, so speichert diese Impuls und Drehimpuls. Die Bewegungsenergie darf in diesem Fall in einen kinetischen und in einen Rotationsanteil
aufgespalten werden. Wenden wir uns in einem zweiten Schritt der Hantel als Ganzes zu, stellen wir fest, dass diese netto nur noch Drehimpuls
enthält. Entsprechend unserer Definition ist nun die gesamte Bewegungsenergie inklusive der kinetischen Anteile der beiden Kugeln als
Rotationsenergie zu bezeichnen. Kinetische Energie kann somit in Rotationsenergie übergehen, falls die Systemgrenze entsprechend verändert
wird. Mit einer eigentlichen Umwandlung hat dies aber nichts zu tun.
Impuls-, Drehimpuls- und
Energiebilanz
Die Dynamik eines starren Köpers liegt nun klar vor uns: die Impulsbilanz (die Summe über alle Kräfte ist gleich Masse mal Beschleunigung
des Massenmittelpunktes) und die Drehimpulsbilanz (die Summe über
alle Drehmomente ist gleich Massenträgheitsmoment mal Winkelbeschleunigung) legen zusammen mit den Anfangsbedinungen (Lage und
Rotationsmechanik
Seite 81
Anfangsbewegung) die Zukunft eines starren Körpers eindeutig fest.
Über dieser Grundstruktur haben wir nun mit Hilfe der Energie ein
zweites Gefüge aufgebaut. Dabei steht wieder die Bilanz im Zentrum:
die Summe über alle Leistungen der Kräfte und der Drehmomente ist
gleich der Änderungsrate des Energieinhaltes. Der Inhalt selber kann in
drei Anteile aufgespalten werden: in eine innere, eine kinetische und
eine Rotationsenergie. Weil wir uns hier auf den starren Körper beschränken, führen die Leistungen nie direkt zu einer Änderung der inneren Energie. Damit fällt dieser Speicher als nicht beeinflussbar aus der
Bilanz heraus.
Unser Erfahrungsraum wird durch das Gravitationsfeld der Erde, das lo- die Änderung der Gravitationskal als homogen angesehen werden darf, in eine Vertikale und in eine energie
horizontal liegende Ebene aufgespalten. Das Gravitationsfeld beeinflusst all unsere Tätigkeiten so nachhaltig, dass wir erst seine Abwesenheit richtig wahrnehmen würden. Wie lässt sich nun die Wirkung dieses
Feldes in die Dynamik des starren Körpers einbauen? Eine erste Diskussion haben wir schon hinter uns: Impuls- und Drehimpulsaustausch zwischen Körper und homogenem Feld lassen sich durch eine Einzelkraft
darstellen, die im Schwerpunkt angreift und deren Stärke gleich dem
Produkt aus Masse und Gravitationsfeldstärke ist. Ein kleines Gedankenexperiment soll nun zeigen, dass ein ausgedehnter Körper bei einer
Ortsveränderung mit dem Gravitationsfeld gleichviel Energie austauscht, wie ein punktförmiges Vergleichsobjekt mit identischer Masse.
Dazu denken wir uns das zu untersuchende Objekt über eine Achse, die
durch dessen Schwerpunkt geht, an einem Seil aufgehängt. Die Arbeit
der Seilkraft hängt nun bei quasistatischer Verschiebung im homogenen
Gravitationsfeld nur von dessen Masse ab. Weder die Grösse des Körpers noch dessen Orientierung im Raum spielt dabei eine Rolle. Sogar
eine Eigenrotation würde den Energieaustausch nicht beeinflussen. Somit darf die Formel für die Änderung der Gravitationsenergie bei Verschiebung eines Körpers aus der Translationsmechanik übernommen
werden. In Zukunft soll die folgende Abmachung gelten: mit der Lage
eines Körpers ist immer der momentane Ort des Schwer- oder Massenmittelpunktes gemeint
∆WG = m ⋅ g ⋅ ∆hMMP
(4.5)
Mit (4.4) und (4.5) haben wir alle drei äusseren Energiespeicher der innere und äussere Energie
klassischen Mechanik besprochen. Die drei Speicher heissen äussere
Energieanteile, weil sowohl bei der Bewegung als auch bei der Gravitation die Energie nicht eigentlich im Körper drin steckt. Die Energie, die
effektiv im Objekt selber zu lokalisieren ist und als Ganzes die Ruhemasse bildet, heisst denn auch korrekterweise innere Energie. Aus historischen Gründen nennt man die Gravitationsenergie auch potentielle
Energie des Körpers, womit man andeutet, dass dieser Energieanteil nur
von der Lage des zu diskutierenden Objekts selber abhängt.
Alle Bewegungsprobleme der Starrkörpermechanik lassen sich mit Hil- energetisch lösbare Probleme
fe der Impuls- und der Drehimpulsbilanz lösen. Man nennt die beiden
Seite 82
Rotationsmechanik
Bilanzen deshalb auch Grundgesetze. Bei einigen Fragestellungen führt
der Weg über die Energiebilanz jedoch schneller zum Ziel. Es gilt nun,
die Probleme zu erkennen und auszuscheiden, die mit dem Energiesatz
elegant und schnell lösbar sind. Die Grenze zwischen Fragestellungen,
die energetisch lösbar sind und solchen, die mit dem Energiesatz alleine
nicht zu bewältigen wären, kann recht klar ausgemacht werden: immer
dann, wenn es um Systeme geht, denen nur eine einzige Bewegungsmöglichkeit offensteht, kann die Energiebilanz bedenkenlos angewendet
werden. Weil die meisten Maschinen als Input-Output-Systeme zu dieser Gruppe gehören, widme ich den energetisch lösbaren Aufgaben ein
ganzes Kapitel. Hier soll dieser Lösungsweg nur anhand eines kleinen
Beispiels aufgezeigt werden.
Beispiel 19: Ein rotationssymmetrischer Körper (Radius r, Masse m, Trägheitsmoment J) rollt eine schiefe Ebene (Neigungswinkel β)hinunter. Man bestimme die Beschleunigung und die Endgeschwindigkeit der Symmetrieachse nach einer Rollstrecke der Länge s.
Lösung 19:
Weil der Körper nur hinunterrollen kann, ist diese Aufgabe mit dem Energisatz lösbar. Zuerst überlegen
wir uns, wieviele Energiespeicher beteiligt sind, welche davon Energie aufnehmen und welche Energie
freisetzen. Als Energielieferant tritt nur das Gravitationsfeld auf. Die gravitativ freigesetze Energie wird
vom Körper übernommen und als Bewegungsenergie gespeichert. Die zugehörigen Anteile, die kinetische
und die Rotationsenergie, sind über die Rollbedingung verknüpft. Nach diesen Überlegungen könnten wir
ein Energiesumme zu zwei Zeitpunkten aufstellen. Dabei ist links vom Gleichheitszeichen die Energiesumme zum ersten Zeitpunkt und rechts die totale Energie aller Speicher zum zweiten Zeitpunkt hinzuschreiben. Etwas einfacher scheint mir die modifizierte Vorgehensweise zu sein. Wir schreiben links die
freigesetzte Energie und rechts vom Gleichheitszeichen die von den Speichern aufgenommene hin. Beide
Schreibweisen sind durch algebraische Umformung ineinander überführbar.
∆WG = ∆Wkin + ∆Wrot
m ⋅ g ⋅ s ⋅ sin β =
v=
1
1
⋅ m ⋅ v2 + ⋅ J ⋅ ω 2
2
2
mit v = ω ⋅ r
2 ⋅ m ⋅ g ⋅ s ⋅ sin β
= 2 ⋅ k ⋅ m ⋅ g ⋅ s ⋅ sin β
J
m+ 2
r
J
mit k = 1 +
m ⋅ r2
−1
Aus der Endgeschwindigkeit lässt sich die konstant bleibende Beschleunigung rein kinematisch herleiten.
Ich möchte hier noch einen zweiten, direkten Weg aufzeigen, der auch noch bei variabler Beschleunigung
funktioniert. Zuerst stellt man eine Momentanbilanz für die Energie auf. Dann eliminiert man mit Hilfe der
Rollbedingung sowohl die Winkelgeschwindigkeit als auch die Winkelbeschleunigung. Zuletzt klammert
man die Momentangeschwindigkeit aus. Der Rest liefert die Lösung des Problems
W«G = W«kin + W«rot
m ⋅ g ⋅ v ⋅ sin β = m ⋅ v ⋅ v« + J ⋅ ω ⋅ ω«
mit v = ω ⋅ r und v« = ω« ⋅ r
v« = k ⋅ g ⋅ sin β
Vergleichen Sie die hier skizzierten Lösung mit dem Standardverfahren (Aufgabe 7, Kapitel 2). Der dort
gewählte Weg über die Grundgesetze ist zwar beschwerlicher, doch lassen sich damit mehr Details klären.
So liefert die Energieerhaltung zum Beispiel keine Angaben zu den Stärken der Zwangskräfte (Haftreibungs-, Führungs- und Lagerkräfte).
Rotationsmechanik
Seite 83
? Kontrollfragen
9.) Wie heissen die beiden Teile der Bewegungsenergie?
10.) Wie hängt die kinetische Energie eines starren Körpers mit dessen Impuls zusammen? Wie
lässt sich die Rotationsenergie durch den Drehimpuls ausdücken?
11.) Ein starrer Körper wird im homogenen Gravitationsfeld verschoben. Wovon hängt die Änderung der Gravitationsenergie ab?
Zusammenfassung von Kapitel 4
Ein Körper kann als Teil eines Systems auf zwei Arten zum Gesamtdrehimpuls beitragen: einmal
indem er rotiert und ein zweites Mal durch seine Relativbewegung. Man nennt die erste Speicherform Eigendrehimpuls und die zweite Bahndrehimpuls. Im Gegensatz zum Eigendrehimpuls hängt
der Bahndrehimpuls nicht von der Geometrie und der Zusammensetzung des Einzelobjektes ab: die
Grösse des Bahndrehimpulses ist durch das Produkt aus dem Impuls des Körpers und dem Abstand
der Bewegungslinie vom MMP des Gesamtsystems festgelegt. Mit Bewegungslinie bezeichne ich
die Gerade, die in Richtung des Impulses zeigt und durch den MMP des Teilkörpers verläuft.
Ist ein System in lauter geometrisch einfache Körper zerlegbar, berechnet man den Gesamtdrehimpuls, indem man für jede Komponente sowohl Eigen- als auch Bahndrehimpuls berechnet und dann
alle Beiträge zum Gesamtwert zusammenzählt. Sind alle Teile des Systems starr miteinander verbunden, kann die Winkelgeschwindigkeit als Systemgrösse ausgeklammert werden. Was übrig bleibt, ist
dessen Massenträgheitsmoment. Die zugehörige Formel verlangt, dass jeder Teilkörper zwei Beiträge zu liefern hat. Der erste besteht aus seinem eigenen Massenträgheitsmoment, der zweite aus
der Masse mal dem Quadrat seines Abstandes vom Gesamtmassenmittelpunkt.
Die Bewegungsenergie eines starren Körpers lässt sich in zwei Teile zerlegen. Der eine, die Rotationsenergie wird zusammen mit dem Drehimpuls, der andere, die kinetische Energie, zusammen mit
dem Impuls gespeichert. Beide Teile werden analog berechnet: halbe Trägheit mal das Quadrat der
entsprechenden Geschwindigkeit. Fasst man mehrere Objekt zu einem Ganzen zusammen, geht die
kinetische Energie oder ein Teil davon in der Rotationsenergie des neu entstandenen Systems über.
Die Rotationsenergie des Gesamtsystems ist dann wieder die Energie, die zusammen mit dem jeweiligen Bahndrehimpuls gespeichert wird.
Die einem Körper zugeschriebene Energie darf in vier Teile zerlegt werden. Drei davon sind als äussere zu betrachten. Die äusseren Energieanteile eines Systems hängen direkt mit der Wahl des
Bezugssystems zusammen. Der Rest, der nur dem Körper zugeschrieben werden darf, heisst denn
auch innere Energie. Die inneren Energie ist jederzeit als schwere Masse direkt messbar. Neben der
kinetische und der Rotationsenergie gehört die Gravitationsenergie zu den äusseren Anteilen der
Energie eines Körpers. Die Änderung der Gravitationsenergie ist im homogenen Feld immer gleich
dem Produkt aus Masse, Gravitationsfeldstärke und Verschiebungshöhe des Schwerpunktes.
!? Lernzielkontrolle
Den Bahndrehimpuls eines Teilkörpers berechnen können.
1.)
Ein Planet fällt auf einer elliptischen Bahn um die Sonne. Wie bestimmt man seinen Bahn-
Seite 84
2.)
3.)
Rotationsmechanik
drehimpuls.
Zwei Sterne bilden ein Doppelsystem. Aus welchen Teilbeiträgen setzt sich sein Drehimpuls
zusammen?
Eine Kanone feuert am Äquator eine Kugel horizontal in Ost-West-Richtung ab. Wie berechnet man die dadurch hervorgerufene Drehimpulsänderung der Erde?
Bei Systemen mit mehreren Rotationsfreiheistgraden den Drehimpulsinhalt bestimmen können.
4.)
5.)
Ein Mountanbiker lässt sein Fahhrad im falschen Moment los. Es fällt nach einer kurzen
Rollstrecke in eine Schlucht hinunter. Wie berechnet man den Drehimpuls des fallenden Fahrrades? Wie gehen die beiden Räder in die Berechnung ein?
Eine Skulptur bestehe aus einem horizontal ausgerichteten Balken und zwei gleich schweren
Körpern. Der Balken dreht sich gleichmässig um eine vertikale Achse, die durch seine Mitte
geht. In der Nähe der beiden Enden des Balkens sind die Körper, die sich ebenfalls um eine
senkrechte Achse drehen können, angeordnet. Der eine Körper, eine Kugel, dreht sich doppelt
so schnell wie der Balken; der andere, eine Scheibe, rotiert mit dreifacher Balkendrehzahl
gegensinnig zu den beiden andern Objekten. Wie berechnen Sie den total gespeicherten Drehimpuls?
Das Massenträgheitsmoment eines Systems, das aus geometrisch einfachen Körpern zusammengesetzt ist, berechnen können.
6.)
7.)
Ein Handrad kann vereinfacht als Scheibe mit exzentrisch aufgesetztem Zylinder angesehen
werden. Wie berechnet man das Massenträgheitsmoment eines isolierten Handrades?
Eine Scheibe (Masse m, Radius R) weise eine exzentrisch angebrachte, durchgehende Bohrung auf. Der Abstand Scheibenachse-Lochmitte ist gleich dem halben Radius und beim Bohren wurden 20% des Materials zerspant. Wie berechnen Sie das Massenträgheitsmoment
dieses Objekts?
Wissen, wie die Bewegungsenergie eines starren Körpers zu bestimmen ist.
8.)
Ein Körper rollt auf einer horizontalen Ebene geradeaus. Wie berechnet man seine Bewegungsenergie?
9.) Wie ist die Rotationsenergie eines Körpers definiert?
10.) Ein Sauerstoffmolekül fliegt durch den Raum und rotiert gleichzeitig. Von der Massenverteilung her betrachtet, besteht das Molekül aus zwei sehr kleinen Kugeln, den beiden Kernen, die
sehr weit auseinander liegen. Wie berechnet man die Bewegungsenergie dieses Moleküls?
11.) Zweiatomige Moleküle,wie etwa die Stickstoffteilchen in unserer Luft, bewegen sich bei Zimmertemperatur sehr schnell. Sie können zudem um zwei der drei mögliche Achsen rotieren.
Wenn man nun die Temperatur des Gases absenkt, nimmt sowohl die Translations- als auch die
Rotationsnergie im Mittel proportional mit der absoluten Temperatur ab. Darf nun behauptet
werden, dass Wärme nur ein anderes Wort für Bewegungsenergie sei?
Rotationsmechanik
Seite 85
A Übungsaufgaben
1.)
Man berechne den Drehimpulsinhalt des Erde-Mond-Systems. Die siderische Umlaufzeit des
Mondes beträgt 27 d, 7 h,43 m, 11.5 s und die Erde dreht sich in 23 h, 56 m, 4.09 s einmal um
ihre Achse. Die weiteren Daten sind: Mondmasse 7.35·1023 kg; Durchmesser des Mondes 3476
km; Erdmasse 5.977·1024 kg; mittlerer Durchmesser der Erde 12’735 km; Abstand Erde-Mond
384’400 km.
2.)
Ein dünner Holzstab (Masse 500 g, Länge 1,5 m), der auf einer horizontalen Glatteisfläche
liegt, wird von einer Kugel (Masse 3 g) getroffen, die horizontal mit einer Geschwindigkeit
von 500 m/s 20 cm von einem Stabende entfernt normal einschlägt und dann steckenbleibt.
Wie bewegt sich der Stab nach dem Einschlag der Kugel? Geben Sie die Geschwindigkeit des
MMP und die Winkelgeschwindigkeit an.
3.)
Ein aufrecht fallendes, quadratisches Horzbrett (Masse 2 kg, Massenträgheitsmoment bezüglich der vertikalen Achse 0.5 kg·m2) wird von einer Gewehrkugel (Masse 5 g, Geschwindigkeit
700 m/s) getroffen, die auf gleicher Höhe wie der MMP und 20 cm von diesem entfernt einschlägt und steckenbleibt.
Um welchen Winkel dreht sich das Brett, bis es aufschlägt, wenn seine Fallgeschwindigkeit
beim Einschlag 15 m/s betragen hat und es nachher noch zwei Meter weiter hinunterfällt?
Um welche Strecke ist das Brett dann zurückgeworfen worden?
4.)
Ein Blechbüchse (Radius 10 cm, Höhe 15 cm) aus 2 mm Eisenblech (Dichte 7300 kg/m3) rotiere reibungsfrei auf einem Luftkissen, ohne sich wegzubewegen. In zwei Sekunde dreht sie
sich einmal um ihre Achse. Nun lässt man einen gleichsinnig rotierenden Stahlzylinder (Radius 25 mm, Höhe 5 cm, Dichte 7500 kg/m3, Winkelgeschwindigkeit 15 s-1) aufrecht stehend
hineinfallen. Wie gross ist die Winkelgeschwindigkeit der Büchse, nachden sich die Bewegungen der beiden Körper angeglichen haben und der Stahlzylinder aufrecht stehend am Büchsenmantel anliegt und mitrotiert?
5.
Der nebenstehend skizzierte Zylinder (Radius 25 cm,
Masse 50 kg, Durchmesser der Bohrungen 10 cm) rollt
auf zwei parallelen, vertikalen Seilen ab. Wie schnell rotiert er, wenn sich der Massenmittelpunkt aus der Ruhe
heraus um 50 cm abgesenkt hat?
6.)
Ein Jo-Jo (Masse 200 g, Wickelradius 2 cm, Massenträgheitsmoment 0.001 kg·m2) rotiere mit einer Umdrehung
pro Sekunde und sein Massenmittelpunkt bewege sich
mit 30 cm/s in vertikaler Richtung nach unten. Die Beschleunigung der Symmetrieachse ist nach oben gerichtet
und beträgt 2 m/s2.
Welche Leistung hat die Schnurkraft?
Mit welcher Rate ändert sich die kinetische und die Rotationsenergie
7.)
Ein rotierender Zylinder (Masse 30 kg, Radius 15 cm, Drehzahl 450 Umdrehungen pro Minute) wird sanft auf eine horizontale Unterlage abgesetzt. Der Zylinder rollt infolge der Reibung
schon nach kurzer Zeit gleichförmig davon. Um welchen Betrag hat sich dann die Bewegungsenergie des Zylinders geändert?
20 cm
Seite 86
Rotationsmechanik
8.)
Eine Kugel (Radius 2.5 cm, Dichte 7300 kg/m3) rollt mit einer Mittelpunktsgeschwindigkeit
von 3 m/s über eine horizontale Ebene. Zwei Sekunden später beträgt ihre Geschwindigkeit
nur noch 2.5 m/s.
Bestimmen Sie mit Hilfe der Grundgesetze die Haftreibungskraft und das Rollreibungsdrehmoment.
Ueberprüfen Sie das Resultat, indem Sie eine Momentanenergiebilanz für das System Kugel
aufstellen.
9.)
An den Enden eines dünnen Stabes (Masse 20 kg,
Länge 2 m) befinden sich die beiden Achsen von
zwei Rädern (Massen 5 kg und 12 kg, Massenträgheitsmomente 0.5 kgm2 und 2 kgm2). Das ganze
System sei auf einer horizontal Glatteisfläche rei5 kg
12 kg
bungsfrei gelagert. Anfänglich ruht der Stab und
beide Räder drehen sich mit zwei Umdrehungen
pro Sekunde gegeneinander?
Wie schnell dreht sich der Stab, wenn die Räder infolge der Lagerreibung ihren Endzustand erreicht haben?
Wie gross müssen die Reibdrehmomente sein, damit der Ausgleichsvorgang zehn Sekunden
dauert?
Wieviel Energie wird dabei dissipiert?
10.) Die Gravitationsfeldstärke kann mit einer Atwoodschen Fallmaschine gemessen werden. Bei diesem Gerät wird eine Schnur
über eine Rolle (Scheibe mit Radius 5 cm und Masse 200 g) geführt. Von den beiden an den Seilenden befestigten Körpern weise der schwerere eine Masse von 550 g auf und der andere sei um
50 g leichter. Die Rolle, die das Seil umlenkt, läuft praktisch reibungsfrei.
Wie gross ist die Beschleunigung des einen Körpers bei einer
Feldstärke von 9.79 N/kg?
500 g
550 g
11.) Ein Fadenspule (Masse 3 kg, Massenträgheitsmoment 0.003 kg·m2)
rollt an zwei Schnüren ab, die um den grösseren Umfang (Radius 5
cm) gewickelt worden sind. Über dem Mittelteil der Spule (Radius 2
cm) ist gegenläufig eine weitere Schnur aufgerollt, an dem ein zweiter
Körper (Masse 1 kg) hängt. Nun wird das Ganze aus der Ruhe heraus
gestartet. Wir warten, bis sich der Körper um 5 cm abgesenkt hat.
Mit welcher Winkelgeschwindigkeit dreht sich dann die Spule?
12.) Eine Kugel (Radius 7 cm, Masse 10 kg) wird auf dem Scheitel eines
zylinderförmigen Daches (Radius 5 m) losgelassen. Sie rollt dann ohne
zu rutschen ein Stück weit über die eine Seite hinunter. Zu einem bestimmten Zeitpunkt ist die Normalkraft nur noch halb so gross wie das
Gewicht.
Wieviel Drehimpuls hat dann die Erde an das System „vom Dach rollende Kugel“ abgegeben?
1 kg
Rotationsmechanik
Seite 87
5. Dynamische Systeme
Nachdem wir das Bewegungsverhalten des starren Körpers studiert und uns mit den Grundgesetzen
(Impuls-, Drehimpuls- und Energiebilanz) vertraut gemacht haben, wollen wir die Dynamik verschiedener Systeme untersuchen. Viele einfache Geräte benehmen sich entweder wie eine Kapazität,
wie ein Widerstand oder wie eine Induktivität. Die Begriffe selber entstammen der Elektrizitätslehre,
einem Zweig der Physik, in dem schon seit langer Zeit Systemdynamik betrieben worden ist. Mit der
elektromechanischen Analogie kann das Verhalten einzelner Geräte direkt auf die Dynamik von
elektrischen Netzwerken abgebildet und zusammen mit der gefundenen Lösung wieder zurücktransformiert werden. Die systemdynamische Methode unterstützt aber nicht nur das Denken in Analogien. Sie erlaubt es uns, unterschiedliche Bewegungsabläufe zu klassifizieren, zu modellieren und
damit besser zu verstehen.
Zwei Eigenschaften des Drehimpulses beeinträchtigen die Analogie zwischen Drehmechanik und
Elektrizitätslehre. Die erste, die Vektoreigenschaft, verursacht keine grossen Probleme. Obwohl wir
uns bisher auf ebene Drehbewegungen und damit auf nur eine Komponente des Drehimpulses
beschränkt haben, konnten wir eine Fülle von Vorgängen analysieren und diskutieren. Die zweite
Eigenschaft, die Nichtlokalisierbarkeit des Drehimpulses, wirkt sich viel störender aus. Anders als
beim elektrischen Strom, der nur im Leiter drin fliesst, wird der Drehimpuls hauptsächlich zwischen
und neben den einzelnen Bauteilen transportiert. Der Drehimpulsstrom kann sich folglich unbemerkt
verzweigen. Insbesondere bei mechanischen Geräten mit mehr als nur einer Achse wird Drehimpuls
über die kollektive Wirkung von zwei Lagern, als Drehmoment eines Kräftepaares, mit der Umgebung ausgetauscht. So fliessen bei einem Getriebe die meisten Drehimpulsströme über das Gehäuse
zu oder weg, d.h. der Drehimpuls nimmt einen ganz andern Weg als die Energie. Um solche schwer
zu lokalisierenden Transporte auszuschliessen, beschränken wir uns in diesem Kapitel auf mechanische Systeme, die auf einer einzigen Achse aufgereiht sind. Mit dieser Einschränkung können Drehmomente, die durch die Wirkung zweier Achslager hervorgerufen werden, schon gar nicht auftreten.
Leistungsfähige Rechner und ausgeklügelte Software eröffnen dem Ingenieur ganz neue Perspektiven. Musste früher eine Problemstellung über mehrere Stufen vereinfacht und dann mit Hilfe von
geschlossen lösbaren Differentialgleichungen beschrieben werden, genügt es heute, ein sauberes
Abbild der Aufgabenstellung, ein Modell, zu erstellen und dieses dann in einer geeigneten Programmiersprache zu formulieren. STELLA, ein Modellierwerkzeug, welche das eigentliche Programmieren zum Kinderspiel macht, wird am Schluss dieses Kapitels vorgestellt. An einem einzigen Beispiel
werde ich aufzeigen, wie effizient ein solches Werkzeug sein kann. Leider lassen sich Simulationsprogramme in einem Lehrbuch nicht direkt vorführen. Solche Programme einzusetzen, bleibt deshalb dem eigentlichen Unterricht vorbehalten. Erfahrungen, die wir in den letzten Jahren in
Winterthur gesammelt haben, zeigen, dass die Studenten die Struktur einer Theorie erst richtig
begreifen, wenn sie selber schon einiges modelliert haben.
! Lernziele
Die Definitionsgleichung für die drei linearen Systemeigenschaften Kapazität, Widerstand und
Induktivität kennen.
Geeignete drehmechanische Systeme in einzelne Elemente auflösen und das zugehörige
systemdynamische Modell skizzieren können.
Seite 88
Rotationsmechanik
5.1 Die Drehimpulskapazität
das Massenträgheitsmoment
als Kapazität
Rotierende Körper speichern proportional zur Winkelgeschwindigkeit
Drehimpuls. Der Proportionalitätsfaktor, das Massenträgheitsmoment,
erfüllt damit die Definitionsgleichung einer drehmechanischen Kapazität. Die Systemeingenschaft Drehimpulskapazität bleibt solange konstant, wie sich der zugehörige Körper unter dem Einfluss der Rotation
nicht verformt. Die kapazitiv gespeicherte Energie, in der Drehmechanik auch Rotationsenergie genannt, berechnet sich denn auch analog zur
im Kondensator gespeicherten, elektrischen Energie. Analogien reduzieren die Anzahl der zu verwendenden Formeln. Kennt man zum Beispiel
den Ausdruck für die kinetische Energie eines Körpers, weiss man auch,
wie die Rotationsenergie oder die Energie eines Kondensators zu berechnen ist.
der Fliehkraftregler als Kapazitivglied
Das Massenträgheitsmoment eines starren Körpers kann mit Hilfe von
Formel (3.6) berechnet werden. Lassen sich Objekte mit komplizierter
Architektur auf einfachere zurückführen, ist Formel (4.1) beizuziehen.
In diesem Abschnitt wollen wir uns mit einem etwas komplexeren kapazitiven Systemen, einem vereinfachten Modell eines Fliehkraftreglers,
beschäftigen. Bei diesem Apparat gehen von einem frei drehbar gelagerten Zylinder zwei Stäbe radial nach aussen, auf denen je eine Metallkugel so aufgesetzt ist, dass sie frei beweglich verschoben werden kann.
Damit die Kugeln beim Einsetzten der Drehbewegung nicht einfach
weggeschleudert werden, sind sie über eine Spiralfeder mit dem zentralen Zylinder verbunden. Eine viskose Reibvorrichtung sorgt für eine
überkritische Dämpfung. Beginnt sich die ganze Anordnung zu drehen,
wandern die Kugeln mit zunehmender Winkelgeschwindigkeit immer
weiter nach aussen. Weil die Position der beiden Kugeln ein Mass für
die Drehzahl abgibt, kann mit deren Hilfe der Antrieb geregelt werden.
Fig. 5. - 1: Ein vereinfachtes
Modell eines Fliehkraftregels. Die frei verschiebbaren
Kugeln werden von je einer
Feder festgehalten, wobei die
weiter aussen angebrachte
Dämpfvorrichtung
die
Eigenschwingung der beiden
Kugeln dämpft.
Kugelabstand und Winkelgeschwindigkeit
Das Massenträgheitsmoment des Reglers setzt sich aus einem konstanten Beitrag (inklusive Trägheitsmomente der Kugeln) und einem Anteil
zusammen, der quadratisch mit dem Achsabstand der Kugelmittelpunkte anwächst. Weil diese Distanz über die Härte der Federn und die Trägheit der Kugeln mit der Drehzahl verknüpft ist, lässt sich das gesamte
Massenträgheitsmoment als Funktion der Winkelgeschwindigkeit
schreiben. Doch zuerst suchen wir nur den Zusammenhang zwischen
der Drehzahl und dem Abstand der Kugelmitten. Aus dem Schnittbild
der einen Kugel folgt, dass neben der Gewichts- und der dazu kompensatorisch wirkenden Führungskraft nur noch die Federkraft angreift. Sie
Rotationsmechanik
Seite 89
sorgt dafür, dass die Kugel auf der Kreisbahn bleibt. Setzt man nun das
Federgesetz in die Impulsbilanz für die eine Kugel ein und drückt die
Zentralbeschleunigung durch die Winkelgeschwindigkeit aus, gewinnt
man eine Formel, welche die Drehbewegung mit dem Kugelabstand verknüpft
FF = m ⋅ an
mit FF = D ⋅ ∆l und an = ω 2 ⋅ r
D ⋅ (r - l 0 ) = m ⋅ ω 2 ⋅ r
r=
(5.1)
D ⋅ l0
D − m ⋅ω 2
Aus dem Nenner von Formel (5.1) ist zu entnehmen, dass die Winkelge- die maximal mögliche Drehschwindigkeit des Apparates einen bestimmten Wert nicht überschreiten zahl
darf. Die effektive Grenzdrehzahl ist jedoch um einiges tiefer anzusetzen, da die maximal mögliche Auslenkung der Kugeln durch die Länge
der Haltestäbe begrenzt wird. Übrigens entspricht das theoretische Winkelgeschwindigkeitsmaximum der Kreisfrequenz eines einzigen KugelFeder-Oszillators.
Nun sind wir in der Lage, das Massenträgheitsmoment des Reglers in das Massenträgheitsmoment
Funktion der Winkelgeschwindigkeit anzugeben. Die Drehimpulskapa- des Reglers
zität setzt sich aus einem konstanten und einem drehzahlabhängigen
Anteil zusammen. Zum zweiten Teil tragen, wenn wir von der Trägheit
der Federn und der Dämpfer einmal absehen, nur die beiden Kugeln etwas bei: die zusätzliche Drehträgheit ist gleich der doppelten Massen
multipliziert mit dem Quadrat des Achsenabstandes. Zusammen mit
dem in (5.1) berechneten Abstandsgesetz erhalten wir für die ganze
Drehimpulskapazität die folgende Funktion
D ⋅ l0
J = J0 + 2 ⋅ m ⋅
D − m ⋅ω 2
2
(5.2)
Der Drehimpulsinhalt des Reglers darf zu jedem Zeitpunkt als Massen- die zugehörige Rotationsenerträgheitsmoment mal Winkelgeschwindigkeit geschrieben werden. Ent- gie
scheidend für das kapazitive Verhalten ist einzig die momentane
Massenverteilung. Etwas komplizierter sieht die Berechnung der zugehörigen Rotationsenergie aus. Den korrekten Wert erhält man über die
Zeitintegration der Energieänderungsrate. Weil diese gleich der Leistung des Drehmomentes ist, darf sie zu jedem Zeitpunkt als Produkt
von Winkelgeschwindigkeit und Drehimpulsänderungsrate geschrieben
werden.
Wrot
te
ωe
0
0
= ∫ ω ⋅ L« ⋅ dt =
ωe
+ ∫ 8 ⋅ m2 ⋅
0
ωe
D⋅l
∫ J0 ⋅ ω ⋅ dω + ∫ 2 ⋅ m ⋅ D − m ⋅0ω 2 ⋅ ω ⋅ dω
( D ⋅ l0 )
2
0
2
(D − m ⋅ω )
2 3
⋅ ω 2 ⋅ dω
(5.3)
Die Rotationsenergie des Drehzahlreglers setzt sich gemäss (5.3) aus Rotations- und Federenergie
drei Teilen zusammen, wobei nur das erste Integral einfach zu interpre-
Seite 90
Rotationsmechanik
tieren ist. Es liefert die altbekannte Formel für die Rotationsenergie eines starren Körpers. Die beiden andern Integrale, die wir hier nicht
berechnen wollen, beschreiben teilweise die Energie, die in den gespannten Federn gespeichert wird. Im Einklang mit der Definition habe
ich den ganzen Ausdruck von (5.3) als Rotationsenergie bezeichnet, da
die gesamte Menge freigesetzt wird, sobald der Drehimpuls langsam ans
Bezugssystem abfliesst. Wird der Fliehkraftregler dagegen schnell abgebremst, macht sich die Wirkung der beiden Dämpfer bemerkbar. Diese
verzögern den Abbau des Massenträgheitsmomentes und dissipieren dabei einen Teil der freisetzbaren Energie.
Grundlegende Beziehungen
In diesem Abschnitt haben wir anstelle eines gewöhnlichen Kapazitivgliedes ein etwas komplizierteres Element kennengelernt und diskutiert.
Der praktische Nutzen dieser Übung liegt weniger im technischen als im
methodischen Bereich. Wir konnten am Beispiel eines Körpers mit variablen Massenträgheitsmoment wesentliche Beziehungen der Drehmechanik wie die Definition des Massenträgheitsmomentes oder den
Zusammenhang zwischen den Änderungsraten der Rotationsenergie
und des Drehimpulses repetieren. Solche Abhängigkeiten bilden das
Fundament, auf dem eine umfassende Systemdynamik aufgebaut werden kann.
? Kontrollfragen
1.)
2.)
3.)
4.)
Wie ist die Drehimpulskapazität definiert?
Wie hängt bei einem starren Körper die Rotationsenergie mit der Drehimpulskapazität zusammen?
Wie kann die Rotationsenergie definiert werden?
Skizzieren Sie für das Anfahren des Fliehkraftreglers ein Flüssigkeitsbild. Überlegen Sie sich
dann anhand dieses Bildes, wie die drei Energiebeiträge zu interpretieren sind.
5.2 Widerstandselemente
Drehimpulswiderstände
Drehimpuls, der von einem ersten Schwungrad in ein zweites überfliesst, das eine andere Drehzahl aufweist, setzt zwischen den beiden
Körpern Energie um. Das dazwischenliegende System heisst Widerstand, falls die Energie nicht gespeichert sondern dissipiert wird. Der
Widerstand selber ist analog zum elektrischen Gegenstück zu definieren:
RL =
Elemente mit konstantem
Widerstand
∆ω
IL
(5.4)
Drehimpulswiderstände weisen selten eine lineare Charakteristik auf.
Im Falle einer Reibschicht besteht nur Hoffnung auf ein Ohmsches Verhalten, falls diese von einem dicken Ölfilm gebildet wird. Ein solcher
Film kann sich zum Beispiel zwischen einem Hohlzylinder und einem
konzentrisch hineingeschobenen Vollzylinder ausbreiten. Sofern die
zähe Flüssigkeit dem Newtonschen Gesetz gehorcht, wonach die Scher-
Rotationsmechanik
Seite 91
s
r
spannung proportional zum zugehörigen Geschwindigkeitsgradienten
ist, bleibt der Widerstand drehzahlunabhängig. Zur Berechnung der
Stärke des durch die Kupplung fliessenden Drehimpulsstromes multiplizieren wir die an den Zylinderoberflächen auftretende Scherspannung τ
mit der Mantelfläche und dem Radius des Vollzylinders. Dann ersetzen
wir die Scherspannung mit Hilfe der Viskosität durch das Geschwindigkeitsgefälle im innern der Ölschicht. Zuletzt drücken wir die Geschwindigekeit noch durch das Produkt aus Winkelgeschwindigkeit und Radius
aus.
h
IL = τ ⋅ 2⋅ π ⋅ r ⋅ h⋅ r = η ⋅
Fig. 5. - 2: Ein Ölfilm, der
sich zwischen zwei zylindeförmigen Flächen ausdehnt,
wirkt als Drehimpulswiderstand. Der Widerstand selber
ist definiert als Quotient von
Winkelgeschwindigkeitsdifferenz und Drehimpulsstromstärke. Diese Systemeigenschaft kann folglich
berechet werden, sobald der
Drehimpulsstrom oder das
Drehmoment in Abhängigkeit der Differenz der beiden
Winkelgeschwindigkeiten
bekannt ist.
2⋅ π ⋅ η ⋅ h⋅ r 3
∆v
⋅ 2⋅ π ⋅ r ⋅h ⋅ r =
⋅ ∆ω
s
s
Solange die Dicke des Oelfilms klein gegenüber dem Zylinderdurch- der Widerstand einer Oelfilmmesser ist, muss nicht zwischen Innen- und Aussenradius unterschieden kupplung
werden. Wendet man die Definitionsgleichung (5.4) auf die formale Beschreibung der Ölkupplung an, erhält man den Drehimpulswiderstand in
Abhängigkeit der Geometrie des Gerätes und der Viskosität η des Öls
RL =
s
2 ⋅ π ⋅ η ⋅ h ⋅ r3
(5.5)
Die oben skizzierte Kupplung, bei der ein Ölfilm auf der Mantelfläche
eines Zylinders für den Drehimpulsübertrag verantwortlich ist, lässt sich
nur mit grossem konstruktivem Aufwand herstellen. Formel (5.5) ist
deshalb ein bisschen praxisfremd. Technisch ausgereifte, ölgefüllte
Kupplungen weisen trotz anderer Geometrie aber immer noch einen nahezu konstanten Drehimpulswiderstand auf und sind durchaus mit unserem Modell vergleichbar. Kühlt man das Öl ab, steigt dessen Viskosität
an und der Drehimpulswiderstand der Kupplung wird kleiner. Sobald
das Öl erstarrt, klemmt sich die Kupplung fest und der Drehimpulswiderstand sinkt auf Null zusammen. Ein solches Verhalten kann in Analogie zur Elektrizitätslehre mit supraleitend umschrieben werden.
Seite 92
Rotationsmechanik
Im vorletzten Kapitel haben wir die vom Drehimpulsstrom freigesetzte
Prozessleistung eingehend besprochen. Setzt man nun die Definitionsgleichung des Widerstandes (5.4) in die Formel der Prozessleistung
(3.2) ein, folgt ein Ausdruck, der einen Zusammenhang zwischen dem
Widerstand und der dissipierter Leistung herstellt
∆ω 2
P = ∆ω ⋅ I L =
= RL ⋅ I L2 (5.6)
RL
Beispiel 20: Das auf einen Ventilator einwirkende Drehmoment zeigt bei stationärem Betrieb die folgende Drehzahlabhängigkeit: M=M0+a·ω+b·ω2. Welche Werte müssen den drei unbekannten Paratern zugeschrieben werden, wenn der treibende Motor bei einer Drehzahl von 60 Umdrehungen pro Minute 43 Watt, bei 90 U/min
120 Watt und bei 120 U/min 258 Watt abgibt?
Lösung 20:
Da der Drehimpulswiderstand des Ventilators nicht konstant ist, führt Formel (5.6) nicht zu einer Vereinfachung des Lösungsweges. Wir gehen deshalb von der Prozessleistungsformel (3.2) aus. Mit dieser Beziehung und den gegebenen Werten für die drei Rotationszustände kann ein dreiteiliges Gleichungssystem
aufgestellt werden. Die Lösung dieses Gleichungssystems liefert uns die gesuchten Werte:
M0 = 1 Nm, a = 0.3 Nms, b = 0.1 Nms2.
? Kontrollfragen
5.)
6.)
7.)
8.)
Welche Einheit muss dem drehmechanischen Widerstand zugewiesen werden.
Statt eines Widerstandes hätten wir auch einen Leitwert definieren können. Geben Sie die
zugehörige Definitionsgleichung an.
Durch welche Beziehung ist die Viskosität einer Flüssigkeit definiert?
Wie hängt die als homogen angenommene Scherspannung auf dem Zylindermantel der oben
skizzierten Kupplung mit dem Drehmoment zusammen?
5.3 Induktivität
elastische Wellen
Eine starre Welle, welche zwei Schwungräder miteinander verbindet,
leitet den Drehimpuls ohne Energieverlust weiter. Zudem scheint sich
der Drehimpuls mit einer beliebig grossen Geschwindigkeit durch die
Welle hindurch fortzupflanzen. Wird nun die starre Welle durch eine elastische ersetzt, verändert sich das dynamisches Verhalten des ganzen Systems: die beiden Räder lassen sich gegeneinander verdrehen und
können sogar in eine Drehschwingung versetzt werden. Hätte man die
starre Welle gegen eine viskose Kupplung ausgetauscht, sähe das Verhalten der Anordnung nochmals anders aus; elastische Teile verhalten
sich grundlegend anders als plastisch verformbare. Erstere speichern die
zur Verfügung gestellte Energie bis auf Abruf, letztere erzeugen damit
Entropie.
Definition der Indukitivität
Verdrehbare Wellen zeichnen sich durch eine Eigenschaft aus, die nicht
mit dem oben eingeführten Begriff des Widerstandes umschrieben werden kann. Zur weiteren Analyse denken wir uns die elastische Welle einseitig eingespannt. Verdrehen wir nun die andere Stirnfläche mit
Rotationsmechanik
Seite 93
∆ω
LL = «
IL
ω
zunehmend
konstanter Drehzahl, steigt der hindurchfliessende Drehimpuls linear
mit der Zeit an. Sobald die Drehbewegung aufhört, verharrt der Drehimpulsstrom auf seinem momentanen Wert. Drehen wir nun die Stirnfläche
langsam gegen die ursprüngliche Lage, schwillt der Strom wieder ab.
Daraus folgt, dass der Drehimpulsstrom seine Stärke nur ändert, wenn
die Differenz der Winkelgeschwindigkeiten an beiden Endflächen ungleich Null ist. Ein solches Verhalten, bei dem die Potentialdifferenz die
Änderungsrate des durchfliessenden Stromes bestimmt, bezeichnet man
allgemein als induktiv. Folglich ist die elastisch verdrehbare Welle ein
Induktivglied der Drehmechanik. Die Eigenschaft selber, die Induktivität, ist durch das Verhältnis von Winkelgeschwindigkeitsdifferenz und
Aenderungsrate des Drehimpulses definiert
(5.7)
Bei einem drehmechanischen Induktivglied legt die Differenz der Win- das Drehfedergesetz
kelgeschwindigkeit fest, wie stark die Änderungsrate des hindurchfliessenden Drehimpulsstromes sein muss. Widerstand und Induktivität
operieren damit auf verschiedenen Stufen: beim ersten Element bestimmt die Winkelgeschwindigkeitsdifferenz direkt die Stromstärke,
beim zweiten nimmt dieses Gefälle nur indirekt über die Änderungsrate
Einfluss auf den Strom. Besteht die Welle aus Stahl, gilt bekanntlich das
Drehfedergesetzes. Dies bedeutet, dass das Drehmoment proportional
mit dem Verdrehungswinkel zunimmt.
I L = D* ⋅ ∆ϕ
(5.8)
Die Formulierung (5.8) ist ein kleines Stück präziser als die übliche die Winkelrichtgrösse
Umschreibung des Drehfedergesetzes, bei der man links vom Gleichheitszeichen das Symbol für ein Drehmoment hinschreibt. Die Präzision
ergibt sich aus dem Umstand, dass nur ein einziger Drehimpulsstrom
hindurchfliesst, aber zwei Drehmomente auf die Welle einwirken. Die
Drehfederkonstante D*, die im Sinne einer Verallgemeinerung auch
Winkelrichtgrösse genannt wird, beschreibt modellmässig das Torsionsverhalten eines elastischen Bauteils. Für jedes Element muss die Winkelrichtgrösse zuerst bestimmt werden. Bei zylinder- und prismenförmigen Wellen ist diese Grösse aus dem Schubmodul des Materials und
aus der Geometrie des Stabes zu berechnen. Im Abschnitt 2.5 haben wir
diese Rechnung für einen homogenen Vollzylinder schon durchgeführt.
Beachten Sie dazu Formel (2.3).
Leitet man die Gleichung (5.8) nach der Zeit ab, geht der Verdrehungs- Winkelrichtgrösse und Induktiwinkel in die Differenz der Winkelgeschwindigkeit über. Damit lässt vität
sich die Formel (5.8) mit der Definition der Induktivität (5.7) vergleichen. Dieser Vergleich liefert uns den Zusammenhang zwischen der allgemeinen Systemeigenschaft Induktivität und der rotationsmechanischen Grösse Drehfederkonstante: die Winkelrichtgrösse entspricht dem
Reziprokwert der Drehimpulsinduktivität. Zusammenfassend kann gesagt werden, dass jedes verdrehbare Bauteil sytemdynamisch eine Induktivität repräsentiert. Gehorcht das Element dem Federgesetz, ist die
Seite 94
Rotationsmechanik
Induktivität belastungsunabhängig.
Systeme mit kombinierten
Eigenschaften
Jeder Welle kann ein Trägheitsmoment zugeschrieben werden. Damit
verhält sie sich auch noch kapazitiv. Genaue Messungen zeigen, dass
praktisch bei all diesen Bauteilen auch noch Energie dissipiert wird. Damit verhalten sich todierbare Wellen wie kleine Drehimpulswiderstände.
Systemdynamisch gesehen handelt es sich bei der Welle um eine Induktivität, die zusätzlich eine kleine Kapazität und einen geringen Widerstand aufweist. Dass bei einem Bauteil gleich alle drei Eigenschaften
nachgewiesen werden können, ist eher der Normalfall als die Ausnahme. Weil aber meistens eine der Eigenschaften dominiert, wird das Vorhandensein der beiden andern oft nicht bemerkt.
? Kontrollfragen
9.) Wie hängt bei einer Induktivität der Strom mit der Potentialdifferenz zusammen?
10.) Welche Einheit muss der Drehfederkonstanten zugeschrieben werden?
11.) Wie kann aus der Winkelrichtgrösse (Drehfederkonstante) die zugehörige Induktivität bezüglich des Drehimpulsstromes berechnet werden?
12.) Wie hängt beim Vollzylinder die Winkelrichtgrösse von seiner Länge und von seinem Durchmesser ab?
5.4 Energiebetrachtung
kapazitiver Energiespeicher
Kapazitäten und Induktivitäten sind reine Energiespeicher, d.h. beide
Bauteile können Energie aufnehmen und ohne Verlust wieder abgeben.
Kapazitive Elemente speichern Energie zusammen mit der Grundmenge, induktive Elemente zusammen mit dem zugehörigen Strom. Bei Systemen mit konstanter Kapazität wächst die gespeicherte Energie
quadratisch mit der Grundmenge an. Den Energieinhalt eines Kapazitivgliedes der Drehmechanik haben wir unter dem Titel Rotationsenergie
schon früher eingehend untersucht. Beachten Sie, dass ein Schwungrad
umso mehr Energie pro Drehimpuls speichert, desto kleiner seine Kapazität ist. Sollte Ihnen diese Aussage nicht unmittelbar einleuchten, so
skizzieren Sie schnell ein Flüssigkeitsbild für ein Schwungrad mit grossem Trägheitsmoment und eines für einen weniger trägen Körper. Beim
erstgenannten muss eine vorgegebene Menge Drehimpuls weniger hoch
hinaufgepumpt werden als beim zweiten, was mit einem kleineren Energieaufwand verbunden ist.
induktive Energiespeicher
Die induktiv gespeicherte Energie hängt nur vom hindurchfliessenden
Strom ab . Den zugehörigen Wert berechnet man am einfachsten über
die vom Drehimpulsstrom umgesetzte Leistung. Dazu ist in der Prozessleistungsformel (3.2) die Winkelgeschwindigkeitsdifferenz durch die
Definitionsbeziehung für die zugehörige Induktivität (5.7) zu ersetzen.
Der neue Ausdruck, der nur noch die Induktivität, die Stromstärke und
die zugehörige Änderungsrate enthält, muss dann noch über die Zeit
Rotationsmechanik
Seite 95
aufintegriert werden.
te
te
1
Wind = ∫ ∆ω ⋅ I L ⋅ dt = ∫ L ⋅ I L ⋅ I«L ⋅ dt = ⋅ L ⋅ I L2
2
0
0
(5.9)
Formel (5.9) verknüpft die gespeicherte Energie direkt mit der Stromstärke. Sie gilt für alle induktiv wirkenden Elemente, solange deren
Drehimpulsinduktivität (Reziprokwert der Winkelrichtgrösse) stromunabhängig Systems ist. In allen andern Fällen muss das Integral zusammen mit der entsprechenden Funktion direkt ausgewertet werden.
Die systemdynamische Betrachtungsweise ist leider viel zuwenig ver- die Federenergie
breitet. Insbesondere die Mechanik ist noch stark statisch geprägt. Damit Sie den Zusammenhang mit der Ideenwelt der klassischen Lehrbücher erkennen können, schreibe ich die induktiv gespeicherte Energie
noch als in Funktion des Drehwinkels auf.
Wdef =
1 M2 1 *
⋅
= ⋅ D ⋅ ∆ϕ 2 (5.10)
2 D* 2
Beispiel 21: Zwischen zwei Schwungrädern (Massenträgheitsmomente 50 kgm2 und 150 kgm2), die auf einer gemeinsamen Achse reibungsfei gelagert sind, ist eine Torsionsfeder (Winkelrichtgösse 200 Nm) angebracht worden. Nun werden die beiden Räder gegeneinander gedreht, bis das eine Federende um zwei volle
Umdrehungen gegenüber dem andern verschogen ist. Welche maximale Winkelgeschwindigkeit erreicht
das grössere Rad, wenn man beide Körper miteinander loslässt.
Lösung 21:
Sobald man die Räder loslässt, wird mit Hilfe der Federenergie Drehimpuls von einem Körper in den
andern gepumpt. Sobald die Feder entspannt ist, drehen sich die Räder am schnellsten. Aus dieser Überlegung heraus ergeben sich zwei Forderungen: die Federenergie muss gleich gross sein, wie die später
gespeicherte Rotationsenergie und der total vorhandene Drehimpuls ist immer gleich Null. Die beiden
Bedingungen lassen sich als direkt als Gleichungen hinschreiben
D* ⋅ J1
⋅ ∆ϕ
J22 + J1 ⋅ J2
1 *
1
1
⋅ D ⋅ ∆ϕ 2 = ⋅ J1 ⋅ ω12 + ⋅ J2 ⋅ ω 22
2
2
2
ω2 =
J1 ⋅ ω1 + J2 ⋅ ω 2 = 0
ω 2 = 7.26s −1
Weil sowohl die Federenergie als auch die Rotationsenergie quadratisch mit dem Winkel bzw. mit der Winkelgeschwindigkeit zunehmen, wächst die maximal erreichbare Winkelgeschwindigkeit linear mit dem
anfänglich erzeugten Verdrehungswinkel.
? Kontrollfragen
13.) Geben Sie die kapazitiv gespeicherte Energie als Funktion des Drehimpulsinhaltes an.
14.) Wie hängt die induktiv gespeicherte Energie mit der Stromstärke zusammen?
15.) Die beiden Endflächen einer Welle werden mit konstanter Winkelgeschwindigkeit gegeneinander verdreht. Wie verändert sich die Drehimpulsstromstärke? Wie wächst von der Welle aufgenommene Energie an?
Seite 96
Rotationsmechanik
5.5 Einfache Bausteine
Netzwerkanalyse
Schwungräder, elastische Wellen und Kupplungen dürfen in beliebiger
Reihenfolge auf einer Achse zusammengefügt werden. Der Umstand,
dass alle Elemente hintereinander montiert sind, bedeutet noch lange
nicht, dass sie auch eine Serieschaltung verkörpern. Ist zum Beispiel ein
Schwungrad über einen Keil mit einer durchgehenden, drehbar gelagerten Welle fest verbunden, verzweigt sich der Drehimpulsstrom im Gebiet des Keils: der von der einen Seite her zufliessende Drehimpuls kann
entweder im Rad gespeichert werden oder über den andern Teil der Welle weiterfliessen. Enthält die zu untersuchende Maschine gar mehrere
Achsen, kann Drehimpuls, wie wir schon früher gesehen haben, durch
das Zusammenspiel zweier Lagerkräfte über einen nicht lokalisierbaren
Pfad ausgetauscht werden. Am komplexesten präsentiert sich Situation,
falls eine oder mehrere Achsen nich parallel zu den andern ausgerichtet
sind. Dann werden sogar mehrere, getrennt zu bilanzierende Drehimpulssorten ausgetauscht. Dazu mehr im nächsten Kapitel. Trotz dieser
Eigenheiten der drehmechanischen Systeme orientieren wir uns bei der
Analyse einfacher Apparate an den elektrischen Netzwerken. In keinem
Zweig der Technik ist der systemdynamische Ansatz auch nur annähernd so weit entwickelt worden wie in der Elektrizitätslehre.
Beispiel 22: Zwei Schwungräder, die auf einer gemeinsamen Achse gelagert sind, werden über eine verdrehbare Feder
miteinander verbunden. Von den Lagern der Räder her wirkt je ein Reibdrehmoment mit Ohmscher Charakteristik ein. Eine Reibungt bezeichnen wir als Ohmsch, wenn die Kraft oder das Drehmoment linear mit
der Differenz der entsprechenden Geschwindigkeit anwächst. Man zeichne für diese Anordnung eine elektrische Ersatzschaltung.
Lösung 22:
In jedem der beiden Räder befindet sich eine Verzweigung, ein sogenannter Knoten. Der Drehimpuls kann
entweder über die Lager an die Erde oder über die Drehfeder an den andern Körper wegfliessen. Im
Gegensatz zum elektrischen Kondendator, dessen totale Ladung immer gleich Null ist, handelt es sich
beim Schwungrad um ein System mit einem echten Fassungsvermögen. Diesen Unterschied gilt es mit
Hilfe eines kleinen Tricks wettzumachen: wir ergänzen das Massenträgheitsmoment durch ein Spiegelbild,
das direkt mit dem Bezugssystem verbunden wird. Diese System, in der Regel die Erde, übt eine zentrale
Funktion aus: alle freien Drehimpulsleitungen sind mit dem Bezugssystem direkt zu verbinden. Unser
Netz weist also zwei Kapazität auf, die durch eine Induktivität miteinander verbunden sind und beidseits
über einen Widerstand an die Erde ankoppeln.
R1
R2
L1
C1
C2
Der schwarze Kasten steht für die Induktivität und die beiden weissen für je einen Widerstand. Kapazitäten
werden durch Doppelstriche dargestellt.
Rotationsmechanik
Seite 97
Ein auslaufendes Schwungrad ist mit dem elektrischen RC-Glied ver- das RC-Glied
gleichbar. Die Analogie ist modelltreu, sofern die Lagerreibung proportional mit der Winkelgeschwindigkeit abnimmt. In diesem Abschnitt
wollen wir das Verhalten eines linearen RC-Gliedes untersuchen. Dazu
schreiben wir zuerst die Drehimpulsbilanz für das System Schwungrad
hin. Dann ist die Inhaltsänderungsrate durch das kapazitive Gesetz und
der abfliessende Drehimpulsstrom durch das Widerstandsgesetz zu substituieren.
ω
I L = L« mit L« = J ⋅ ω« und I L = −
RL
RL ⋅ J ⋅ ω« + ω = 0
(5.11)
Das Minuszeichen beim Widerstandsgesetz ist eine direkte Folge des
Systemwechsels: die Drehimpulsstromstärke in der Bilanz bezieht sich
auf das Schwungrad, die Stromstärke im Widerstandsgesetz beschreibt
dagegen den Durchfluss durch das Lager. Die Differentialgleichung verlangt, dass die Winkelgeschwindigkeit umso schneller abfällt, je kleiner
die Kapazität und je geringer der Widerstand ist. Die Lösung von (5.11)
ist in der Elektrizitätslehre bestens bekannt: die Winkelgeschwindigkeit
muss exponentiell mit der Zeit abnehmen.
ω (t ) = ω 0 ⋅ e
− tτ
mit τ = RL ⋅ CL = RL ⋅ J
(5.12)
Das Produkt aus Widerstand und Kapazität, das mit der Einheit Sekunde
gemessen wird und meistens mit dem griechischen Buchstaben für t,
dem Tau, abgekürzt wird, heisst Zeitkonstante. Diese Konstante τ gibt
die Zeitspanne an, in welcher der Inhalt des Schwungrades auf den e-ten
Wert abgesunken ist.
Beispiel 23: Auf ein Schwungrad (Massenträgheitsmoment 60 kgm2), das sich mit einer Winkelgeschwindigkeit von 50
rad/s dreht, wirkte vom Lager her ein bremsendes Drehmoment mit einer Stärke von 2 Nm ein. Wie lange
dauert es, bis das Rad bei konstant gehaltenemDrehmoment stillsteht? Welche Winkelgeschwindigkeit
würde das Schwungrad zu diesem Zeitpunkt aufweisen, wenn sich die Reibung Ohmsch verhielte?
Lösung 23:
Wieder gehen wir von der Drehimpulsbilanz oder vom Grundgesetz der Drehmechanik aus. Die Integration ist diesmal elementar: das abfliessente Drehmoment mal die gesuchte Zeit entspricht dem Impulsinhalt zum Zeitpunkt Null. Mit der Division durch das Drehmoment erhalten wir eine Bremszeit von 1500
Sekunden.
Die soeben durchgeführte Rechnung lässt sich als Formel schreiben
Weil im zweiten Fall die Lagerreibung dem Ohmschen Gesetz gehorcht,
J ⋅ω
t=
bleibt der Quotient aus der Winkelgeschwindigkeit und der Stärke des
M
abfliessenden Drehimpulsstromes konstant. Die Bremszeit wird damit zur
Zeitkonstante.
Mit der Lösung dieses Problems haben wir einen allgemeingültigen Zusammenhang gefunden. Die Zeitkonstante entspricht der Zeit, die aufzuwenden ist, damit sich eine Kapazität bei festgehaltener Anfangsstromstärke vollständig entleert.
Seite 98
Rotationsmechanik
Der Schwingkreis
J
ω
D*
Ein frei drehbar gelagertes Schwungrad sei über eine Feder mit der Erde
fest verbunden. Körper und Feder bilden zusammen mit dem Bezugssystem einen mechanischen Schwingkreis. Solange keine Dämpfung vorhanden ist, kann das angestossene Rad beliebig lange hin und her
pendeln. Dabei tauscht es seinen Drehimpulsinhalt über die Feder mit
der Erde aus. Zur Analyse des Bewegungsablaufes schreiben wir wieder
die Drehimpulsbilanz für das System Schwungrad hin. Doch diesmal
unterliegt der über die Feder abfliessende Drehimpuls dem induktiven
Gesetz, was die Ableitung der Bilanzgleichung nach der Zeit erforderlich macht. Mit dieser Anpassung liegt eine Differentialgleichung zweiter Ordnung vor.
ω
I«L = L«« mit L«« = J ⋅ ω«« und I«L = −
= − D* ⋅ ω
LL
J ⋅ ω«« + D* ⋅ ω = 0
die harmonische Schwingung
Die Differentialgleichung (5.13) verlangt, dass die Winkelgeschwindigkeits-Zeit-Funktion und ihre zweite Ableitung bis auf das Vorzeichen
und einen konstanten Faktor gleich aussehen. Weil diese Forderung nur
von den harmonischen Funktionen erfüllt wird, ist jede Linearkombination einer Sinus- mit einer Cosinusfunktion Lösung von (5.13). Mathematisch äquivalent aber einfacher zu interpretieren ist eine einzige
Lösungsfunktion, bei der eine zusätzliche additive Konstante im Argument die Lösungsvielfalt garantiert
)
ω (t ) = ω ⋅ sin(ω 0 ⋅ t + δ ) mit ω 0 =
die Bedeutung der drei Parameter
(5.13)
D*
J
(5.14)
Die Winkelgeschwindigkeits-Zeit-Funktion enthält drei Parameter. Der
eine, die sogenannte Kreisfrequenz ω0, hängt von den dynamischen Eigenschaften des Systems ab und kann nicht direkt beeinflusst werden.
Die beiden andern Bestimmungsgrössen, die Amplitude und die Phasenverschiebung, sind dagegen frei wählbar. Ihre Werte sind durch die beim
Zeitnullpunkt herrschenden Bedingungen vorzugeben: die Amplitude ist
ein Mass für die Energie des Oszillators und mit der Phase wird der
Zeitmassstab festgesetzt.
Beispiel 24: Ein Metallzylinder (Masse 12 kg, Radius 8 cm) hängt aufrecht an einem fünf Meter langen Draht (Durchmesser 4 mm) aus Federstahl (Schubmodul 85 GPa).
Wie gross ist die Schwingungsdauer dieses Drehpendels?
Mit welcher maximalen Drehzahl wird der Zylinder rotieren, wenn er um eine Viertelumdrehung ausgelenkt und dann losgelassen wird?
Lösung 24:
Zuerst berechnen wir die beiden Systemgrössen. Die Formel für das Massenträgheitsmoment ist der
Tabelle 1 zu entnehmen und zur Berechnung der Drehfederkonstanten ziehen wir (2.3) bei. Mit den vorgegebenen Werten erhält man für das Trägheitsmoment 0.0384 kg·m2 und für die Winkelrichtgrösse 0.427
Nm. Zieht man nun die Wurzel aus dem Quotienten der beiden Systemeigenschaften, folgt daraus gemäss
(5.14) die Kreisfrequenz. Weil nach der Schwingungsdauer gefragt wird, müssen wir wissen, wie diese mit
der Kreisfrequenz zusammenhängt. Die harmonische Funktion (5.14) nimmt den ursprünglichen Wert an,
sobald das Produkt aus Kreisfrequenz und Zeit gleich einem Vielfachen von 2π ist. Die Zeit bis die Bedingung das erste Mal erfüllt ist, heisst Schwingungsdauer oder Periode. Kombiniert man die dynamische
Formel für die Kreisfrequenz (5.4) mit dem kinematischen Zusammenhang von Kreisfrequenz und der
Rotationsmechanik
Seite 99
Schwingungsdauer, erhält man die erwünschte Formel.
Mit den vorher berechneten Werten für Trägheitsmoment und WinkelrichtJ
T = 2 ⋅π ⋅
grösse erhalten wir eine Schwingungsdauer von 1.88 s. Diese charakteriD*
stische Zeit hängt, darauf sei nochmals explizit hingewiesen, nicht vom
Auslenkungswinkel ab.
Die maximale Drehzahl kann mit Hilfe der Energie berechenet werden. Dazu setzt man die Federenergie
im sogenannten Totpunkt der Schwingung gleich der Rotationsenergie in der Gleichgewichtslage. Der
direkte Weg geht von der Winkelgeschwindigkeits-Zeit-Funktion aus. Integriert man diese einmal über die
Zeit, erhält man die Winkel-Zeit-Funktion:
Aus dieser Beziehung folgt, dass
die vorgegebenen Winkelamplitude
ω√ √
J
von π|2 mit der Kreisfrequenz zu
ϕ (t ) = ϕ√⋅ cos(ω 0 ⋅ t + δ ) mit ϕ√ =
=ω⋅
ω0
D*
multiplizieren ist. Dies ergibt eine
maximal Drehzahl von 50 Umdrehungen pro Minute.
Mit dem RC-Glied umd dem LC-Schwingkreis haben wir zwei wichtige weitere Bauteile und Resonanz
Bausteine der Systemdynamik kennengelernt. Kombiniert man alle drei
linearen Elemente, resultiert ein gedämpfter Schwingkreis. Weiter können mehrere Schwingkreise gekoppelt oder gleichartige Elemente zu
Ketten zusammenfügen werden. Ein ganz anderes Bewegungsverhalten
bildet sich aus, sobald ein passives Bauteil mit einem Antrieb verbunden
wird. Die zugeschaltete Energieversorgung vermag dann ein System
entgegen der Dämpfung weiterzutreiben, d.h. der Eigenbewegung wird
ein äusserer Rhythmus aufgeprägt. Auf eine periodischer Anregung
kann ein Schwingkreis mit einer sogenannten Resonanz reagieren. Dazu
müssen Anregungs- und Eigenfrequenz nahe genug beieinander liegen.
Das System schwingt dann unter dem Einfluss der Störung immer stärker. Im schlimmsten Fall führt die periodische Einwirkung zu einer Resonankatastrophe, bei der das System infolge zu starker Beanspruchung
zerstört wird.
? Kontrollfragen
16.) Wie heisst das elektrisch-analoge Element des Schwungrades?
17.) Wie berechnet man bei einem RC-Kreis die Zeitkonstante? Was passiert während dieser Zeitspanne?
18.) Ein Schwungrad (Trägheitsmoment J) wird über eine viskose Kupplung (Widerstand RL)
abgebremst. Wie lange dauert es, bis die Drehzahl auf die Hälfte abgesunken ist? Geben Sie
eine Formel für das Resultat an.
19.) Welche Grössen bestimmen die Schwingungsdauer eines Drehpendels?
20.) Wie hängen bei einer harmonischen Schwingung Periode, Frequenz und Kreisfrequenz
zusammen?
21.) Wie berechnet man die Frequenz eines ungedämpften, elektrischer Schwingkreises?
22.) Wie erzeugt man bei einem Schwingkreis ein Resonanzverhalten?
5.6 Computerunterstützte Modellbildung
Im Gegensatz zu den elektrischen Systemgrössen weisen viele Bauteile Modellieren mit Stella
der Rotationsmechanik ein nichtlineares Verhalten auf. Bei solchen Pro-
Seite 100
Rotationsmechanik
blemstellungen macht es wenig Sinn, die ausgefeilte Mathematik der
elektrischen Systemtheorie auf die Mechanik übertragen zu wollen.
Stattdessen wählen wir einen unmittelbareren Zugang. Ein recht benutzerfreundliches Simulationsprogramm mit dem Namen STELLA soll
uns dabei unterstützen. Das Programmieren mit STELLA ist leicht zu
erlernen. Im Wesentlichen stehen nur drei Elemente (Speicher, Strom
und Zusatzvariable) zur Verfügung. Speicher und Ströme werden mit
der Maus zu einem System zusammengefügt. Die zugehörige Bilanzgleichung, das eigentliche Rückgrat jedes dynamischen Modells, wird
im Hintergrund aufgestellt und numerisch integriert. Die Integrationsmethode (Euler oder Runge-Kutta) kann über ein Dialogfenster ausgewählt werden. Jeder weiteren Grösse wie Potential oder Systemeigenschaft wird ein Kreis als Symbol zugewiesen. Dann markiert man mit
roten Pfeilen die gewünschten Relationen und gibt die zugehörigen konstitutiven Gleichungen über Dialogfenster ein. Weil diese Relationen
nachher nicht mehr auf der Modellierungsoberfläche erscheinen, können
sie auf einer separaten Liste jederzeit eingesehen werden.
Modellbildung als Lernprozess
Die eigentliche Modellbildung benötigt wenig Zeit: eine oder mehrere
Bilanzbeziehungen aufstellen, jeder weiteren Variablen einen Kreis zuordnen, Verknüpfungen mit einem Pfeil markieren, die zugehörigen
Gleichungen formulieren, Simulationszeit, Zeitschritt und Integrationsmethode festlegen und schon steht das ganze Modell zur Simulation bereit. Die gerechneten Daten können entweder als Diagramm oder in
Form einer Tabelle eingesehen werden. Die Vorteile der Modellbildung
im Bezug auf das Verständnis dynamischer Systeme lassen sich kaum in
einem Lehrbuch adäquat darstellen. Deshalb soll hier nur exemplarisch
gezeigt werden, wie die systemdynamische Formulierung mit der Philosophie der Modellbildungswerkzeuge im Einklang steht. In einem ersten
Schritt soll nur die Drehimpulsbilanz untersucht werden.
Beispiel 25: Auf ein Schwungrad wirke ein Drehmomen ein, dessen Grösse in Funktion der Zeit vorgegeben ist. DasLager produziert ein Reibdrehmoment, das linear mit der Winkelgeschwindigkeit wächst. Wie schnell
bewegt sich das Rad nach einer vorgegebenen Zeit?
Lösung 25:
Zur Lösung dieses Problems fügen wir auf der Modellierungsebene von STELLA einen Kübel und zwei
Pipelines zusammen. Der Kübelinhalt, den wir zum Zeitnullpunkt gleich Null setzen, verkörpert den Drehimpulsinhalt. Die beiden Leitungen stehen für die zwei Drehmomente.
In das Dialogfeld des ersten Ventils schreiben wir die vorgegebene Funktion. Zur Formulierung der zweiten Stromstärke, des Reibmomentes, brauchen wir den aktuellen Wert der Winkelgeschwindigkeit. Diese
berechnet sich als Quotient von Drehimpuls und Massenträgheitsmoment. Also setzen wir zwei neue
Kreise, einen für das Massenträgheitsmoment und einen für die Winkelgeschwindigkeit, in unser Modell
ein. Dann wird die gegenseitige Abhängigkeit mit roten Wirkpfeilen verdeutlicht. Die mathematischen
Rotationsmechanik
Seite 101
Zusammenhänge weist man den einzelnen Variablen über Dialogfenster zu.
Der Drehimpulswiderstand, der den Zusammenhang zwischen dem abfliessenden Drehimpulsstrom und
der Winkelgeschwindigkeit beschreibt, ist als weitere Grösse ins Modell eingefügt worden. Nun ist das
Ganze schon lauffähig. Integrationsmethode, Zeitschritt und Simulationzeit sind standardmässig eingestellt und können bei Bedarf verändert werden.
Einzelne Schwungräder dürfen in beliebiger Anzahl zusammengeschal- die konstitutiven Gesetze als
tet werden. Lagerreibung, Elastizität der Antriebswellen und hydrauli- Stolpersteine
sche Kupplungen sind schnell modelliert. Etwas aufwendiger gestaltet
sich die Darstellung einer Rutschkupplung oder eines realistischen
Elektromotors. Oft benötigt man eine rechte Portion Intuition, um ein
wirklichkeitstreues Abbild eines gegebenen Apparates herzustellen. Andererseits darf man ruhig einmal ein unrealistisch Verhalten modellieren. STELLA bietet ein weites Feld, auf dem man der Phantasie freien
Lauf lassen kann.
Im Physikunterricht analysiert man auch heute noch die Werke alter Physik und Kreativität
Meister, bestaunt sie und rechnet den vorgegebenen Lösungsweg nach.
Leider bleibt dabei den meisten Schülern und Studenten die schöpferische Seite der exakten Wissenschaft verborgen. Bisher war es ganz wenigen Geistern vergönnt, eigene physikalische Modelle aufstellen zu
dürfen. In dieser Hinsicht kann die dynamische Formulierung der Physik in Kombination mit graphikfähigen Modellbildungs- und Simulationswerkzeugen eine kleine Revolution auslösen, denn erst auf der Stufe
Modellbildung wird physikalisches Schaffen zu einer kreativen Angelegenheit. Ich hoffe, dass im zukünftigen Physikunterricht dank der systemdynamischen Sichtweise die passive Nachbeterei alter Modelle auf
ein erträgliches Mass reduziert wird. Die Physik könnte dann wieder
eine Vorreiterrolle innerhalb der Naturwissenschaft spielen.
? Kontrollfragen
23.) Wieso lassen sich nicht alle Modelle der Drehmechanik auf elektrische Netzwerke abbilden?
24.) Welche Struktur bildet das Rückgrat eines dynamischen Modells?
25.) STELLA arbeitet hauptsächlich mit drei Strukturelementen. Mit welchen?
26.) Im oben aufgeführten Beispiel legt die Winkelgeschwindigkeit das Reibdrehmoment fest. Wie
wird diese Grösse berechnet?
Seite 102
Rotationsmechanik
Zusammenfassung von Kapitel 5
Ein rotationsmechanisches System setzt sich aus verschiedenen Elementen zusammen. Die drei
wichtigsten haben wir besprochen. Das Massenträgheitsmoment speichert als Kapazitivglied proportional zur Winkelgeschwindigkeit Drehimpuls. Bauteile mit variabler Kapazität verändern unter dem
Einfluss der Drehbewegung ihre Geometrie. Unter dem Titel Widerstandselement werden sämtliche
reibungsbehaftete Glieder zusammengefasst. Ein Ohmsches Verhalten liegt jedoch nur vor, wenn der
hindurchfliessende Drehimpulsstrom proportional zur Differenz der Winkelgeschwindigkeiten anschwillt. Jede elastisch verdrehbare Welle verhält sich bezüglich des Drehimpulsstromes induktiv.
Die Induktivität ist proportional zum Reziprokwert der Drehfederkonstanten, auch Winkelrichtgrösse genannt. Leider gehorchen nicht alle Materialien dem Hookeschen Gesetz. Antriebswellen
aus Kunststoffen zum Beispiel verformen sich wesentlich anders als Stahlzylinder. Einerseits ändert
sich ihre Federkonstante mit der Belastung, andererseits führt jede Verformung zu einer Energiedissipation. Will man solche Elemente originalgetreu modellieren, muss man einiges an Erfahrung mitbringen.
Bauteile mit einer Kapazität oder einer Induktivität können Energie zwischenlagern. Die kapazitiv
gespeicherte Energie, die Rotationsenergie, ist proportional zu Winkelgeschwindigkeit im Quadrat.
Die induktiv aufgenommene Energie, oft auch elastische genannt, hängt bei einem linearen Glied nur
von der Induktivität und vom durchfliessenden Drehimpulsstrom ab. Hier geht die Stromstärke quadratisch in die Beziehung ein. Widerstandselemente speichern keine mechanisch abrufbare Energie.
Dafür produzieren sie mit Hilfe der freigesetzten Energie Entropie. Die energiefressende Entropieproduktion wird oft mit Dissipation umschrieben. Bei einem Element mit linearer Charakteristik ist
die Dissipationsrate proportional zum Quadrat des hindurchfliessenden Drehimpulsstromes.
Die Begriffe Kapazität, Widerstand und Induktivität entstammen der Elektrizitätslehre. Weil die
Drehmechanik in ihrer formalen Struktur zur Elektrizitätslehre ähnlich ist, dürfen wir bestimmte
Erkenntnisse von der elektrischen Netzwerkanalyse auf die Rotationsmechanik übertragen. Verhält
sich ein mechanisches Systeme linear, darf die jeweilige Problemstellung direkt in die Elektrizitätslehre übersetzt und dann zusammen mit der Lösung wieder zurücktransformiert werden. In diesem
Kapitel haben wir zwei wichtige Bauteilkombinationen besprochen. Die erste, bei dem ein
Schwungrad über eine viskose Kupplung abgebremst wir, verhält sich analog zum RC-Glied des
elektrischen Stromkreises. Dementsprechend nimmt die Winkelgeschwindigkeit des Rades exponentiell mit der Zeit ab. Nach einer Zeitspanne, die gleich dem Produkt aus Widerstand und Kapazität ist
und Zeitkonstante heisst, sinkt die Winkelgeschwindigkeit auf den e-ten Teil des Anfangswertes ab.
Das zweite System, das sich aus einem Schwungrad und einer verdrehbaren Welle zusammensetzt,
verhält sich analog zum elektrischen Schwingkreis. Die zugehörige Schwingungsdauer ist proportional zur Wurzel aus dem Quotienten von Massenträgheitsmoment und Drehfederkonstante.
Viele Bauteile der Rotationsmechanik weisen ein drehzahlabhängiges Verhalten auf. Insbesondere
bei Widerstandsgliedern findet man die unterschiedlichsten Charakteristiken. Weil sich solche Systemen kaum mit der mechanisch-elektrische Analogie korrekt beschreiben lassen, müssen neue
Lösungsstrategien entwickelt werden. Ein erfolgversprechender Ansatz liefert die direkte Modellbildung mit STELLA. Bei diesem Programm aus der Küche der allgemeinen Systemdynamik wird die
Drehimpulsbilanz mit Kübeln und Piplines nachgebildet. Alle weiteren Grössen sind als Kreise darzustellen und mit Pfeilen zu einem Wirkkreis zu verbinden. Sobald die formalen Beziehungen über
Dialogfelder eingegeben worden sind, ist das Programm lauffähig. Jede Funktion lässt sich entweder
als Graph darstellen oder in Form einer Tabelle exportieren.
Rotationsmechanik
Seite 103
!? Lernzielkontrolle
Die Definitionsgleichung für die drei linearen Systemeigenschaften Kapazität, Widerstand und
Induktivität kennen.
1.)
2.)
3.)
4.)
5.)
6.)
7.)
Mit welcher Einheit wird die Drehimpulskapazität gemessen?
Wann weist ein rotierender Körper keine konstante Drehimpulskapazität auf?
Wie muss Reibung eines Lagers mit der Winkelgeschwindigkeit zusammenhängen, damit sich
dieses dynamische Element analog zum elektrischen Widerstand verhält?
Führt der Luftwiderstand bei einem Ventilator zu einem konstanten Drehimpulswiderstand?
Welche Kupplung zeigt ein Verhalten, das dem elektrischen Widerstand ähnlich ist?
Bei einer Antriebswelle sei die Winkelrichtgrösse bekannt. Wie gross ist dann die Drehimpulsinduktivität?
Welche Wirkung übt eine Induktivität auf den Strom aus? Was passiert, wenn bei einem Kreis
mit Induktivglied der Strom plötzlich unterbrochen wird?
Geeignete drehmechanische Systeme in einzelne Elemente auflösen und das zugehörige
systemdynamische Modell skizzieren können.
8.)
9.)
10.)
11.)
12.)
13.)
Zwei frei drehbar gelagerte Schwungräder koppeln über eine viskose Verbindung. Skizzieren
Sie das elektrisch-analoge Schaltbild. Wie sieht die zugehörige Drehimpulsbilanz auf der
Modellierungsoberfläche von STELLA aus?
Ein Metallzylinder, der koaxial an einem sehr langen Stahldraht hängt, wird vollständig in Oel
eingetaucht. Man skizziere eine elektrisch-analoge Schaltung.
Ein Elektromotor treibt über eine weiche Welle ein Schwungrad an. Dabei fliesst über das
elektromagnetische Feld ein konstanter Drehimpulsstrom zu. Skizzieren Sie das zugehörige
Schaltbild unter Berücksichtigung des Massenträgheitsmomentes des Rotors.
Zwei frei drehbare Schwungräder sind über eine Drehfeder miteinander verbunden. Wie sieht
das elektrische Ersatzschaltbild aus?
Von zwei Schwungrädern, die über eine verdrehbare Welle miteinander verbunde sind, wird
das eine über eine zähe Ölschicht abgebremst. Das andere weist keine nennenswerte Reibung
auf. Skizzieren Sie das Flüssigkeitsbild und die elektrische Ersatzschaltung.
Eine Antriebswelle besitzt sowohl ein Massenträgheitsmoment als auch eine Torsionssteifigkeit. Wie lässt sich ein solches Bauteil möglichst wirklichkeitsgetreu modellieren.
Seite 104
Rotationsmechanik
A Übungsaufgaben
2.)
Das Schwungrad aus Aufgabe 1.) sei über die oben erwähnte Kupplung mit einem zweiten
(Trägheitsmoment 35 kg·m2) verbunden. Anfänglich drehe sich das erste Rad mit 500 Umdrehungen pro Minute in die als positiv angenommene Drehrichtung. Das andere rotiere mit gleicher Drehzahl auf die andere Seite.
Mit welcher Winkelgeschwindigkeit drehen sich die beiden Räder nach ausreichend langer
Zeit? Alle ausserhalb der Kupplung liegenden Reibungseinflüsse sind zu vernachlässigen.
Wieviel Energie wird insgesamt in der Kupplung dissipiert?
Wie lange dauert es, bis das eine Rad gegenüber dem andern nur noch eine relative Drehzahl
von 300 Umdrehungen pro Minute aufweist?
3.)
Ein Metallzylinder (Dichte 7300 kg/m3, Durchmesser 12 cm, Höhe 15 cm) hängt an einem
Stahldraht (Durchmesser 4 mm, Schubmodul 85 kN/mm2).
Wie lang muss der Draht sein, damit die Schwingungsdauer zehn Sekunden beträgt?
4.)
Zwischen zwei ausgewuchteten, reibungsfrei gelagerten Rotoren (Massenträgheitsmomente 2 kg·m2
und 6 kg·m2) ist eine Drehfeder (Winkelrichtgrösse
15 Nm) eingespannt. Die beiden Körper werden nun
um den Winkel 2 rad gegeneinander verdreht und
dann losgelassen.
Berechnen Sie die Maxima der beiden Winkelgeschwindigkeiten.
Wie gross ist die Schwingungsdauer dieses Zweimassenschwingers?
5.)
Ein Schwungrad (Trägheitsmoment 40 kg·m2) ist über eine verdrehbare Welle mit einem zweiten (Trägheitsmoment 100 kg·m2) verbunden. Dreht man den einen Rotor um einen Radianten
und hält den andern gleichzeitig fest, so fliesst ein Drehimpulsstrom von 200 Nm durch die
ganze Anordnung hindurch.
Mit welcher Frequenz schwingt das trägere Rad, wenn man dieses loslässt und den andern weiterhin festhält?
Nun lässt man beide Körper gleichzeitig los. Welche maximale Winkelgeschwindigkeit erreicht das kleiner Rad?
Mit welcher Frequenz schwingen die Räder gegeneinander?
6.)
In Aufgabe 5.) sei das grössere Rad über eine Viskokupplung (Widerstand RL) mit der Wand
verbunden. Zudem wirke auf das andere ein harmonisch oszillierendes Drehmoment (Amplitude M, Frequenz f) ein.
Schreiben Sie für beide Räder rein formal die Drehimpulsbilanz auf.
Ersetzen Sie dann die einzelnen Terme durch die zugehörigen konstitutiven Gesetze.
6 kgm 2
Ein Schwungrad (Massenträgheitsmoment 75 kg·m2) wird über eine viskose Kupplung abgebremst. Nach vier Minuten ist die Drehzahl des Rades von 800 Umdrehungen pro Minute auf
500 abgesunken.
Wie lange dauert es, bis sich das Rad nur noch mit 200 Umdrehungen pro Sekunde dreht? Die
viskose Kupplung verhalte sich ideal, d.h. der durchfliessende Drehimpulsstrom ist proportional zur Winkelgeschwindigkeitsdifferenz.
2 kgm 2
1.)
Rotationsmechanik
7.)
Seite 105
Ein grosser Ventilator (Massenträgheitsmoment 5 kg·m2) muss, damit er mit 120 Umdrehungen pro Minute dreht mit 100 W angetrieben werden. Der Luftwiderstand sei proportional zum
Quadrat der Drehzahl.
Wie gross ist die Antriebsleistung bei einer Drehzahl von 60 Umdrehungen pro Minute?
Formulieren Sie ein Impulsstromstärke-Winkelgeschwindigkeitsgesetz für den Luftwiderstand
und geben Sie für die neu einzuführende Konstante den richtigen Wert an?
Wie lange dauert es, bis der mit 60 Umdrehungen pro Minute rotierende Ventilator stillsteht?
Hinweis: Schreiben Sie zuerst die Drehimpulsbilanz auf. Ersetzen Sie dann die Änderungsrate des Inhaltes durch
das Kapazitivgesetz und die Stromstärke durch die oben formulierte Gesetzmässigkeit. Die so gebildete Differentialgleichung lässt sich durch Separieren lösen.
Wie sieht das Winkelgeschwindigkeits-Zeit-Verhalten des Ventilators aus?
Wie verändert sich das Luftreibungsdrehmoment mit der Zeit?
8.)
Eine Viskokupplung besteht aus einem Kolben (Durchmesser 99.5 mm) und einem koaxial
ausgerichteten, im Boden verankerten Hohlzylinder (Innendurchmesser 100.5 mm). Die ölgefüllte Zwischenschicht ist 0.5 mm dick und erstreckt sich über 100 mm. Die ganze Kupplung
steht aufrecht und zwischen der unteren Stirnfläche des Kolbens und dem Zylinderboden befindet sich ebenfalls eine 0.5 mm dicke Ölschicht. Das zähe Öl weist eine Viskosität von 100
mPa·s auf.
Berechnen Sie den Drehimpulswiderstand des stirnseitig wirkenden Ölfilms.
Hinweis: Zerlegen Sie die Ölscheibe in lauter Ringe der Breite dr. Bestimmen Sie dann bei gegebener Winkelgeschwindigkeit das von der Kolbenoberfläche auf einen beliebigen Ölring einwirkende Drehmoment. Diese Einwirkung muss nun noch über alle Ringe zum Gesamtdrehmoment aufsummiert werden. Zum Schluss ist das
Drehmoment durch die Winkelgeschwindigkeit zu dividieren.
Wie stark ist der Drehimpulsstrom, der bei einer Kolbendrehzahl von 120 Umdrehungen pro
Minute durch das Gerät hindurchfliesst?
9.)
Ein langer, zylinderförmiger Stab werde an der einen Stirnfläche mit hoher Frequenz auf Torsion belastet. Die Belastung schwillt wechselseitig harmonisch an und ab. Infolge dieser Anregung pflanzen sich Drehschwingungen längs des Stabes fort. Modellieren Sie dieses System
als Federkette, indem Sie es mit Schwungrädern und Drehfedern nachbilden.
Wie berechnet man für einen kurzen Metallzylinder der Länge s die Systemeigenschaften
Drehimpulskapazität und Drehimpulsinduktivität?
Die kurzen Zylinder und die dazwischenliegenden Federn können fortlaufend nummeriert werden. Die Kette beginne mit der Feder Nummer 0. Dem ersten Zylinder werde der Index 1 zugewiesen. Wie sieht die Drehimpulsbilanz für den i-ten Zylinder aus?
Ersetzen Sie in der Drehimpulsbilanz für den i-ten Zylinder den Inhalt durch das kapazitive
Gesetz und die Ströme durch das induktive. Wie lautet die so gewonnene Bewegungsgleichung?
10.) Ein Schwungrad (Massenträgheitsmoment 80 kg·m2), das über eine starke Drehfeder fest mit
der Wand verbunden ist, schwingt alle zehn Sekunden einmal hin und her. Dabei dreht es sich
insgesamt um 180˚.
Wie gross ist die Winkelrichtgrösse der Feder?
Wie stark schwillt der durch die Feder fliessende Drehimpulsstrom an?
Welche Maximalleistung setzt der Drehimpulsstrom in der Feder drin um?
Seite 106
Rotationsmechanik
6. Der Drehimpuls als Vektor
In der nichtrelativistischen Mechanik werden drei Sorten Drehimpuls unterschieden. Die drei Sorten
transformieren sich wie die Komponenten eines Vektors. Drei getrennt aufzustellende Bilanzgleichungen, ein komplexes Speicherverhalten des starren Körpers und eine kaum überblickbare Vielfalt
an Transportmöglichkeiten sind mit der Vektoreigenschaft des Drehimpulses verbunden. In diesem
Kapitel beschränke ich mich auf einige wenige Phänomene. Dabei sollen vor allem Beispiele
berücksichtig werden, die entweder technisch wichtig sind oder einen Bezug zum Rest der Drehmechanik herstellen.
In einem ersten Schritt soll die systembezogene Drehimpulsstromstärke verallgemeinert werden, d.h.
das Drehmoment ist zu einer vektorwertigen Grösse auszubauen. Die geometrische Struktur des
Drehimpulses verlangt nun, dass Drehwirkung und Drehmomentenvektor normal zueinander stehen.
Von den beiden sich anbietenden Möglichkeiten wird per Definition die rechthändig orientierte ausgewählt. Soll zum Beispiel eine Schraube angezogen werden, zeigt das zugehörige Drehmoment
vom Kopf in den Schaft hinein. Dies gilt natürlich nur für handelsübliche Gewinde; beim Festdrehen
einer Linksschraube weist das einwirkende Drehmoment vom Schaft gegen den Kopf. Die Händigkeit einer Schraube kann durch blosses Herumbewegen im Raum nicht verändert werden. Erst bei
einer Spiegelung geht eine Rechts- in eine Linksschraube über. Weil ein Drehmomente als Schnittgrössen auf ein Objekt zu beziehen ist, tauchen an jeder Referenzfläche zwei Vektoren auf, die ein
Wechselwirkungspaar bilden. Der eine Pfeil steht für die Drehimpulsstromstärke bezüglich des
ersten Systems, der andere zeigt den Austausch des zweiten an. Zwei gegeneinander gerichtete Drehmomente, die auf ein gemeinsames Objekt einwirken, beschreiben dagegen eine Gleichgewichtssituation. Das eine Drehmoment steht für den Drehimpulseintritt, das andere für den Abfluss. Zur
Illustration ein kleines Beispiel: dreht man bei einer Schraubverbindung mit der einen Hand die Mutter gegen die von der andern Hand festgehaltene Schraube, zeigen beide Drehmomente ins System
hinein. Trotz dieser Symmetrie wird Drehimpuls durch die Verbindung hindurchtransportier, wobei
die Durchflussrichtung von der Wahl des Koordinatensystems abhängt. Der in positive Koordinatenrichtung weisende Pfeil zeigt einen Drehimpulszufluss und der andere einen Abfluss an.
Sowohl der Bahndrehimpuls als auch das in Begleitung einer Kraft einwirkende Drehmoment werden mit Hilfe des Vektorproduktes gebildet. Sollten Sie dieses mathematischen Werkzeug noch nicht
kennen, müssen Sie sich unverzüglich damit vertraut machen. Im Anhang wird ein kleine Einführung
ins Rechnen mit dem Vektorprodukt gegeben. Der im Kapitel 2 gefundene Zusammenhang zwischen
dem seitwärts fliessenden Impulsstrom und dem damit verbundenen Drehimpulsaustausch entspricht
der einen Komponente eines Vektorproduktes. Damit diese Relation vorzeichenmässig immer erfüllt
ist, sind von nun an nur noch rechthändige Koordinatensysteme zulässig. Bei diesen Systemen richten sich die drei Achsen nach den Fingern der rechten Hand aus, d.h. wenn der Daumen in x-Richtung und der Zeigfinger in y-Richtung weisen, legt der Mittelfinger der rechten Hand die
Orientierung der z-Achse fest. Zeichnet man aus Versehen ein linkshändiges Koordinatensystem ein,
stimmt die komponentenweise Ausführung des Vektorproduktes nicht mehr mit der Definition des
Drehmomentes überein.
Im ersten Abschnitt dieses Kapitels soll einem Kräftepaar ein Drehmomentvektor zugeordnet werden. Im zweiten wird gezeigt, wie einer Einzelkraft ein Drehmoment zuzuweisen ist. Gegenüber der
ebenen Darstellung mit nur eine Sorte Drehimpuls ändert sich dabei ausser der mathematischen
Beschreibung kaum etwas. Im dritten Abschnitt werden wir das Speicherverhalten starrer Körper
untersuchen. Leider ist der Zusammenhang zwischen Drehimpulsinhalt und Winkelgeschwindigkeit
nicht mehr so elementar wie die entsprechende Beziehung in der Translationsmechanik. Im allge-
Rotationsmechanik
Seite 107
meinen Fall steht der Drehimpulsvektor nicht parallel zur Winkelgeschwindigkeit. Folglich kann das
Massenträgheitsmoment keine skalare Grösse sein. Diese komplexe Struktur wird ein Stück plausibler, wenn man sich konsequent an der systemdynamischen Analyse orientieren. Mit dieser Methode
lässt sich die Mechanik des starren Körpers in zweit Teilaspekte aufgespalten. Der dynamische Teil
wird von der Drehimpulsbilanz beherrscht, der kinematische verknüpft den Drehimpulsinhalt mit der
Winkelgeschwindigkeit.
Der kinematische Aspekt bildet eindeutig den schwierigeren Teil. Primär generiert der gespeicherte
Drehimpuls über die momentane Winkelgeschwindigkeit eine Drehung im Raum. Diese Bewegung
transformiert die einzelnen Komponenten des Massenträgheitsmomentes, womit wiederum die Winkelgeschwindigkeit beeinflusst wird. Drehimpulsinhalt, Winkelgeschwindigkeit und Drehung im
Raum bilden damit eine Rückkopplungsschleife, welche die Bewegung des Kreisels steuert. Im
Gegensatz zur Translation kann sich also der Rotationszustand eines Körpers ändern, ohne dass die
entsprechende Bewegungsmenge ausgetauscht wird. Wir werden uns aber nur am Rande mit solchen
Kreiselproblemen beschäftigen und uns hauptsächlich auf technisch wichtige Fragen wie Lagerbelastung bei Schwenkbewegungen oder dynamischer Unwucht beschränken.
! Lernziele
Einem Kräftepaar oder einer Einzelkraft einen Drehmomentenvektor zuordnen können.
Wissen, wie die räumliche Drehimpulsbilanz formuliert wird.
Die Energiebilanz für einen starren Körper formulieren können.
Die Mechanik der Schwenkbewegung verstehen.
Die Lagerbelastung bei einer dynamischen Unwucht bestimmen können.
Die Begriffe Deviationsmoment und Hauptachsen verstehen.
6.1 Das Drehmoment eines Kräftepaares
Ein Körper ist im Gleichgewicht, sobald die Summe über alle Kräfte Drehmomente am zweiarmiund die Summe über alle Drehmomente gleich Null sind. Dann wird gen Hebel
netto weder Impuls noch Drehimpuls ausgetauscht. Den Zusammenhang zwischen Drehmoment und Kräftepaar haben wir in einem früheren Abschnitt am Beispiel des Winkelhebels schon einmal eingehend
untersucht. Die dort gefundene Beziehung wollen wir an dieser Stelle
weiter verallgemeinern. Die Schenkel des Hebels schliessen nun keinen
rechten Winkel mehr ein und die Kräfte stehen schief zu den beiden Hebeln. Weil das Koordinatensystem nun nicht mehr nach den Schenkeln
des Hebels ausgerichtet werden kann und jede einwirkende Kraft im
Normalfall in zwei Komponenten zerfällt, fliesst in beiden Armen des
Hebels sowohl ein x- als auch ein y-Impulsstrom. Nun kann jeder der
beiden Ströme einen Drehimpulsaustausch erzwingen. Dazu muss er nur
ein Stück weit seitwärts fliessen. Man darf die ganze Argumentation natärlich auch umkehren: der Drehimpuls, der über den einen Arm des Hebels zu- und über den andern wegfliesst, induziert in beiden Hebelteilen
je nach Lage sowohl einen x- als auch einen y-Impulsstrom.
Seite 108
Zerlegung in Kräftepaare
Rotationsmechanik
Im skizzierten Beispiel habe ich die Lagerkraft in zwei nichtkartesische
Komponenten aufgespalten. Dadurch werden zwei Kräftepaare sichtbar,
die je ein Drehmoment erzeugen. Damit Gleichgewicht herrscht, muss
die Summe der beiden Drehmomente gleich Null sein.
Fig. 6. - 1: Beim Winkelhebel
bilden die Kräfte, die an den
beiden Armen angreifen,
zusammen mit den entsprechenden Komponenten der
Lagerkraft je ein Paar. Die
zugehörigen Impulsströme
fliessen schief zu der jeweiligen Bezugsrichtung.
x
y
komponentenweise Berechnung
In beiden Armen des belasteten Hebels fliesst sowohl x- als auch y-Impuls schief zur Bezugsrichtung. Damit tragen beide Sorten zum Drehimpulsaustausch bei und für jeden Hebelarm ist ein zu (2.1) analoger
Ausdruck hinzuschreiben.
I L = I px ⋅ ∆y − I py ⋅ ∆x
M = Fx ⋅ ∆y − Fy ⋅ ∆x
(6.1)
In Formel (6.1) sind zwei Schreibweisen aufgeführt. Die erste ist konsequenter, dafür ist die zweite gebräuchlicher. Der Ausdruck (6.1) scheint
identisch mit (2.1) zu sein. Im Gegensatz zu jenem beschreibt dieser
aber den Drehimpulsaustausch in nur einem Arm. Fig. 6.-2 zeigt, wie
die Impulsströme aussehen, die durch den linken Arm des Winkelhebels
fliessen.
Fig. 6. - 2: Kräftepaar und
Impulsströme im linken Teil
des
Winkelhebels.
Jede
Kraftkomponente steht für
die Stromstärke des zugehörigen Impulses. Weil die
Kräfte nichts über die Transportrichtung des Impulses
aussagen, sind die Stromrichtungen an den Eintrittsstellen willkürlich gewählt
worden.
x
y
s
F
Kräftepaar
x-Strombild
y-Strombild
Rotationsmechanik
Seite 109
Dreht man das Koordinatensystems um die z-Achse, ändern sich die Das Drehmoment eines KräfteStärken sowohl des x- als auch des y-Impulsstromes. Der mit Hilfe von paares als eine Komponente
(6.1) berechnete Wert des Drehmomentes bleibt jedoch invariant. Dies des Vektorproduktes
folgt direkt aus der Struktur des mathematischen Ausdrucks. Bezeichnet
man das Drehmoment in (6.1) als z-Komponente eines Vektors, kann
der Term rechts vom Gleichheitszeichen als zugehöriger Teil eines Vektorproduktes gelesen werden. Die beiden andern Komponenten finden
man durch zyklisches Vertauschen. Bei diesem Verfahren werden alle Indices in der Formel alphabetisch um einen Wert geschoben, d.h aus dem
x wird ein y, das y verwandelt sich in ein z und das z geht über in ein x.
Das zyklischen Vertauschens erzeugt keine neuen Gesetze. Es spiegelt
nur die Isotropie des Raumes wieder.
Der Drehmomentenvektor eines Kräftepaares kann auch auf elementa- elementargeometrische
rem Weg bestimmt werden. Dazu bildet man zuerst das Produkt aus dem Betrachtungsweise
Betrag der einen Kraft und dem Abstand der beiden zugehörigen Wirklinie. Nun überlegt man, auf welche Seite sich der Körper unter dieser
Wirkung drehen würde, krümmt die Finger der rechten Hand und legt
diese so auf die Zeichnung, dass die Fingerspitzen den zugehörigen
Drehsinn anzeigen. Der Daumen der rechten Hand weist dann in Richtung des Drehmomentenvektors. Vergewissern Sie sich anhand der untenstehenden Figur, dass dieses Vorgehen das gleiche Resultat liefert
wie Formel (6.1).
Abstand
Wirklinie
x
s
Fig. 6. - 3: Das Drehmoment
eines Kräftepaares ist gleich
den Produkt aus dem Betrag
der einen Kraft und dem Abstand der beiden Wirklinien.
In der nebenstehend skizzierten Situation weist der
Drehmomentenvektor
aus
dem Blatt heraus.
F
y
Wirklinie
Das Vektorprodukt lässt sich, wie schon erwähnt, koordinatenfrei for- koordinatenfreie Darstellung
muliern. Insbesonder bei statischen Problemstellungen, wenn also nur
ein Gleichgewicht zu untersuchen ist, erreicht man man manchmal das
Ziel so schneller als mit einer komponentenweisen Berechnung. Deshalb wollen wir uns noch kurz mit koordinatenfreien Formulierung befassen: wirken auf ein System zwei entgegengesetzt gleich grosse Kräfte
ein und kann der Abstand der beiden Kraftangriffsflächen mit dem Vektor s beschrieben werden, so ist das zugehörige Drehmoment gleich dem
Vektorprodukt aus der Kraft und dem Distanzvektor
r r r
M = F×s
(6.2)
Kraft- und Distanzvektor müssen von einem gemeinsamen Punkt ausge- Vektorprodukt und Orientiehen, damit Formel (6.2) auch bezüglich des Vorzeichens korrekt ist. rung des Drehmomentes
Seite 110
Rotationsmechanik
Falls der andere Partner des Kräftepaares beigezogen wird, muss man
die beiden Faktoren in (6.2 ) miteinander vertauschen. Diese Vorzeichenschwierigkeiten lassen sich auf operationellem Weg beseitigen.
Dazu sind zwei Definitionen miteinander in Einklang zu bringen. Als erstes entnimmt man der Zeichnung die Richtung des Drehmomentenvektors. Dazu werden die Finger der rechten Hand wie schon besprochen in
die Wirkrichtung des Kräftepaares gelegt. Der Daumen zeigt dann an,
wie der Drehmomentenvektor orientiert ist. In einem zweiten Schritt
überprüft man mit den Fingern der rechten Hand das Vektorprodukt.
Diesmal muss der Daumen in die Richtung des Kraftpfeils zeigen und
der Zeigfinger ist parallel zum Abstandsvektor auszurichten. Zeigt nun
der abgewinkelte Mittelfinger entgegen der Richtung des vorher festgelegten Drehmomentes, sind die Faktoren im Vektorprodukt (6.2) zu vertauschen. Andernfalls hat man die richtige Definition erwischt.
Beispiel 26: Eine Metallkugel (Durchmesser 25 cm) weise vier Bohrungen auf, die radial nach innen verlaufen und
nach den Ecken eines Tetraeders ausgerichtet sind. Alle vier Bohrlöcher sind mit einem normalen Gewinde
versehen. Nun wirken über drei eingeschraubte Bolzen drei gleich grosse Drehmomente von 10 Nm auf
die Kugel ein. Das vierte, unbelastete Bohrloch zeigt genau vertikal nach unten. Damit sich die Kugel nicht
dreht, wird sie am Äquator an zwei gegenüberliegen Punkten festgehalten. Die beiden Festhaltekräfte bilden zusammen eine Resultierende, welche die Gewichtskraft kompensieren muss und ein Kräftepaar, das
die Kugel bezüglich Rotation stabilisiert. Wie gross ist eine der beiden Komponenten des Paares?
Lösung 26:
Falls man die Symmetrie des Problems einbezieht, ist diese Aufgabe recht einfach zu lösen. Über die vierte
Bohrung müsste ebenfalls ein Drehmoment von 10 Nm einwirken, damit die Kugel nicht zu rotieren
anfängt. Dieses Drehmoment soll nun durch das gesuchte Kräftepaar erzeugt werden. Weil der gegenseitige Abstand dieser Punkte 0.25 m beträgt, messen die beiden Kraftkomponenten je 40 N.
Selbstverständlich kann man zuerst alle drei Drehmomente vektoriell addieren. Man wird dabei aber nur
feststellen, dass die Summe 10 Nm beträgt und der zugehörige Vektor nach unten weist.
die sechs Bilanzgleichungen
Das Drehmoment eines Kräftepaars berechnet sich als Skalarprodukt
aus Kraft und Abstandsvektor. Zudem steht der Drehmomentenvektor
immer normal zur Wirkebene, wobei Wirkrichtung und Drehmomentvektor eine Rechtsschraube bilden. Trotz dieser abstrakten Regel dürfen
wir nie vergessen, dass ein Drehmoment immer einen Drehimpulsaustausch beschreibt. Jede der drei Komponente des Drehmomentenvektors
misst eine andere Stromstärke. Damit verhält sich das Drehmoment zum
Drehimpuls wie die Kraft zum Impuls. Spaltet man alle Kräfte und alle
Drehmomente bezüglich eines Koordinatensystems in ihre Komponenten auf, ergeben die Impuls- und die Drehimpulsbilanz sechs unabhängige Gleichungen, die das Bewegungsverhalten eines starren Körpers
eindeutig festlegen.
? Kontrollfragen
1.)
2.)
Bei einem Kräftepaar weise der eine Vektor in die positive y-Richtung und die beiden Wirklinien bilden eine Ebene, die von der x-Achse normal durchstossen wird. Welche Sorte Drehimpuls tauscht der fragliche Körper aus?
Die y- und die z-Achse des Koordinatensystems liegen in der Wirkebene eines Kräftepaares
Rotationsmechanik
3.)
4.)
5.)
6.)
Seite 111
drin. Blickt man in Richtung der positiven x-Achse auf des Kräftepaar, wirkt dieses im Gegenuhrzeigersinn auf den Körper ein. Nimmt der Körper x-Drehimpuls auf oder gibt er solchen
ab?
Eine Schraube soll in ein Gewindeloch hineingedreht werden. Wie ist das Drehmoment, mit
dem der Schraubenzieher auf den Schraubenkopf einwirkt, gerichtet? In welche Richtung zeigt
das Drehmoment, das am Gewinde angreift?
Wie lauten die Antworten auf die vorangehende Kontrollfrage bei einer Schraube mit Linksgewinde?
Wir legen das Koordinatensystem in den einen Angriffspunkt eines Kräftepaares. Der andere
Angriffspunkt habe die Koordinaten (0.2 m, 0.1m, 0). Die erste Kraft zeige in Richtung des
Vektors (0, 0.3 m, 0.4 m) und sei 25 N stark. Wieviel x-, y- und z-Drehimpuls tauscht der zugehörige Körper über diese Wirkung pro Sekunde mit der Umgebung aus?
Weil die Erde infolge ihrer Eigenrotation abgeplattet ist, kann sie in erster Näherung durch
eine Kugel und einen äquatorialen Ring modelliert werden. Weil die Erdachse zudem schief
zur Sonne steht, wirkt das Gravitationsfeld der Sonne mit einem Drehmoment auf diesen Ring
ein. Überlegen Sie sich anhand einer Zeichnung wie der zugehörige Drehmomentenvektor
gerichtet ist und ob sich diese Grösse im Laufe des Jahres ändert.
6.2 Das Drehmoment einer Kraft
Im allgemeinen Fall ist ein Körper weder im Gleichgewicht noch Der MMP als Bezugspunkt
tauscht er nur über Kräftepaare Impuls mit der Umgebung aus. Das
Drehmoment sollte deshalb direkt einer einzelnen Kraft zugeordnet
werden können. Wie schon oft erwähnt, hängt die Drehimpulsaustauschrate nur von der Stärke und von der seitlichen Versetzung der verschiedenen Impulsströme ab. Die Formel, mit der das Drehmoment
eines Kräftepaares berechnet wird, darf damit auf die Einzelkraft übertragen werden. Nur ist diesmal die Distanz vom Ort des Impulsaustausches bis zum MMP des freigeschnittenen Körpers einzusetzen. Diese
Distanz ergibt sich aus dem Umstand, dass die Lage des Trägheitszentrums angibt, wie weit der jeweilige Impulsstrom im Mittel seitwärts
fliesst. Somit darf Formel (6.2) auch auf Einzelkräfte angewendet werden, nur muss der Vektor s von der Kraftangriffsstelle zum MMP zeigen.
M
MMP
s
M
F
F
s
Fig. 6. - 4: Das Drehmoment
einer Kraft steht normal zur
Ebene, die vom Kraft- und
vom Distanzvektor aufgespannt wird. Der Distanzvektor misst die Entfernung
zwischen dem Angriffspunkt
der Kraft und dem MMP des
freigeschnittenen Systems.
Das einer Kraft mit Hilfe von (6.2) zugeordnete Drehmoment entspricht vektorielle oder Komponentender Rate, mit der ein Körper Drehimpuls austauscht. Da ein beliebiges darstellung?
raumfestes Koordinatensystems den Drehimpulsvektor eindeutig in drei
Teile zerlegt, beschreibt jede der drei Komponenten den Austausch einer
anderen Sorte. Ob im konkreten Fall die komponentenweise Darstellung
oder die Vektorschreibweise angewendet werden soll, lässt sich nicht
generell entscheiden. Solange man Statik betreibt, solange der Drehim-
Seite 112
Rotationsmechanik
pulsinhalt eines Systems verschwindet, sind beid Darstellungsweisen,
die vektorielle und die dreifach-skalare, äquivalent. Bewegungsaufgaben lassen sich aber meistens nur mit einer komponentenweise durchgeführten Rechnung bewältigen.
der MMP als Hebelzentrum
Geometrisch interpretiert besagt Formel (6.2), dass jeder Kraft ein
Drehmoment zugeschrieben werden kann, das gleich dem Produkt aus
dem Betrag der Kraft und dem Abstand der Wirklinie vom MMP ist. Der
zugehörige Drehmomentenvektor steht zudem normal auf der von Wirklinie und MMP aufgespannten Ebene. Achten Sie darauf, dass Sie bei einem freien, starren Körper die Hebelwirkung einer Kraft immer auf das
Trägheitszentrum bezogen wird. Beim starren Körper wird also immer
um den MMP und nicht etwa um die momentane Drehachse gehebelt.
?Kontrollfragen
7.)
8.)
9.)
Eine Kraft greift irgendwo an einem starren Körper an. Bekannt sind Betrag, Richtung und
Angriffspunkt. Wie bestimmt man das begleitende Drehmoment?
Wie hängt das Drehmoment einer Kraft mit der Drehachse des Körpers zusammen?
Ein hochgeworfenes Holzstück werde etwas von der Mitte entfernt von einer Kugel durchbohrt. Infolge der Wechselwirkung verliert das Geschoss eine ganz bestimmte Menge Impuls.
Geht dieser Impuls vollständig auf das Holzstück über, oder wird ein Teil davon in Drehimpuls
oder sogar in Wärme umgewandelt?
6.3 Die drei Sorten
die Drehimpulsbilanz
Die Wörter Drehmoment und Drehimpulsstromstärke sind praktisch
synonym, d.h. mit beiden Begriffen bezeichnet man die Grösse eines
Drehimpulstransportes. Die beiden Begriffe unterscheiden sich eigentlich nur in einem Punkt: Drehmoment existieren nur im Zusammenhang
mit einem ausgewählten System, wogegen die Stärke eines Drehimpulsstromes an jeder beliebigen Referenzfläche definiert ist. Soll die Rotationsbewegung eines isolierten Körpers untersucht werden, sind alle
Drehimpulsströme als Drehmomente auf diesen zu beziehen. Die zugehörige Momentanbilanz liefert dann die Kernaussage
r
r«
MRe s = L
der Bahndrehimpuls als Vektor
oder
MRe s, x L«x
M
= L«
Re s, y y
MRe s, z L«z
(6.3)
Jedem noch so kleinen Teilstück eines starren Körpers darf ein Bahndrehimpuls bezüglich des gemeinsamen Massenmittelpunktes zugeschrieben werden. Dieser Bahndrehimpuls ist aus Konsistenzgründen
analog zum Drehmoment einer Kraft zu definieren. Wir ordnen also jedem Körper mit Hilfe des Vektorproduktes einen Drehimpuls zu, der
normal zu der Ebene steht, die vom Impuls- und vom Distanzvektor gebildet wird.
Rotationsmechanik
Seite 113
Fig. 6. - 5: Jedem Teilkörper
eines Gesamtsystems darf ein
Drehimpuls bezüglich des
gemeinsamen Massenmittelpunktes werden. Dieser sogenannte Bahndrehimpuls berechnet sich aus dem Impuls
wie das Drehmoment aus der
Kraf.
L
m
MMP
MMP
s
v
s
p
.
r r r
L = p×s
(6.4)
Wie schon im ersten Kapitel gezeigt worden ist, lässt sich der Impuls ei- der Eigendrehimpuls des starnes Teilkörpers immer in zwei Teile aufspalten. Der erste Anteil, der ren Körpers
globale, trägt zum Impuls des Gesamtsystems bei und der zweite, der lokale, wird von der Bewegungsmenge der andern Teilkörper kompensiert. Entsprechend dieser Zerlegung kann auch der Drehimpuls in zwei
Teile aufgespalten werden. Die erste Komponente, die mit dem globalen
Impulsanteil zusammenhängt, verschwindet nach der Summation über
alle Teilbeiträge. Die zweite Komponente, die aus dem lokalen Impulsanteil berechnet wird, ist mit den entsprechenden Beiträgen aller andern
Teilsystemen zum Gesamtdrehimpuls des starren Körpers aufzuaddieren. Dieser Wert, Eigendrehimpuls genannt, ist dem starren Körper direkt zuzuschreiben. Er hängt weder vom Bewegungszustand des
nichtrotierenen Bezugssystems noch von der Wahl des Koordinatensystems ab.
L
ω
p
s
L
MMP
s
p
Fig. 6. - 6: Eine Hantel, die
mit schief gelagerem Verbindungsstab um eine starre
Achse rotiert, darf in erster
Näherung durch zwei Massenpunkte dargestellt werden. Weil der Ortsvektor
Kugel-Massenmittelpunkt
nicht gegen das Kreiszentrum zeigt, steht der Drehimpulsvektor schief zur Winkelgeschwindigkeit.
Zur weiteren Analyse wählen wir das Bezugssystem so, dass der Mas- der Drehimpuls bei Kreisbesenmittelpunkt des starren Körpers ruht. Unser Körper werde zudem wegungen
von einer gut gelagerten Achse festgehalten. Damit ist garantiert, dass
die Drehachse ihre räumliche Orientierung beibehält. Denken wir uns
noch die Drehzahl stabilisiert, bleibt auch die Winkelgeschwindigkeit
konstant. Obwohl nun alle Teile des Körpers die Achse auf Kreisbahnen
umrunden, zeigen nicht alle Drehimpulsbeiträge in Richtung des Winkelgeschwindigkeitsvektors. Dies ist schon bei einer schief eingespannten Hantel einzusehen. Bei diesem Objekt geht die Verbindung
Teilkörper-MMP nicht durch das Zentrum der Kreisbahn. Damit steht
der Drehimpuls schief zur Winkelgeschwindigkeit.
Seite 114
Rotationsmechanik
die Zerlegung des Drehimpulses bezüglich einer Achse
p
r
d
s
Drehimpuls und Winkelgeschwindigkeit
Der Bahndrehimpuls der beiden Kugeln einer Hantel darf in zwei Teile
zerlegt werden. Die eine Komponente, die parallel zum Vektor der Winkelgeschwindigkeit steht, bleibt während des Drehvorganges konstant.
Die zweite Komponente, der normal zur Drehachse steht, läuft dagegen
mit der Hantel um die Achse. Der umlaufende Drehimpuls belastet die
Lager mit einem zeitlich variierenden Drehmoment. Im Abschnitt dynamische Unwucht werden wir uns näher mit diesem Phänomen beschäftigen. Zur mathematischen Behandlung schreiben wir den Impuls eines
Teilkörpers mit Hilfe des kapazitiven Gesetzes als Produkt von Masse
und Geschwindigkeit und drücken dann die Geschwindigkeit durch die
Winkelgeschwindigkeit aus. Zusammen mit Formel (6.4) ergibt dies ein
doppeltes Vektorprodukt. Ein solches Produkt darf gemäss einer allgemeinen Regel in eine Differenz von Vektoren aufgespalten werden
r r r
r r r r
r r r
L = p × s = m ⋅ (s × ω ) × s = m ⋅ (s 2 ⋅ ω − (s ⋅ ω ) ⋅ s )
r
r
r
r
(6.5)
= m ⋅ (r 2 ⋅ ω − d ⋅ ω ⋅ r ) = La + Lr
Den Ortsvektor s habe ich bei der Umformung in eine radiale Komponente r und in eine achsiale d aufgespalten. Die mit Formel (6.5) beschriebene Zerlegung des Bahndrehimpulses eines Einzelteils lässt sich
auf den ganzen starren Körper ausdehnen. Damit zerfällt dessen Drehimpuls gleichermassen in zwei Anteile, wobei die radiale Drehimpulskomponente die Drehbewegung mitmacht und die achsiale unbeeinflusst bleibt.
Der starre Körper weist zu einem festgelegten Zeitpunkt nur eine einzige Winkelgeschwindigkeit auf, d.h. alle materiellen Strecken drehen
sich in einem bestimmten Augenblick mit einer einzigen Winkelgeschwindigkeit. Rotiert der Körpern zudem an Ort ohne sich wegzubewegen, geht die Drehachse durch sein Trägheitszentrum hindurch. Damit
spaltet Formel (6.5) den Bahndrehimpuls aller Teilsysteme in je eine
achsenparalle und eine radiale Komponenten auf. Summiert man nun all
diese Beiträge auf und klammert dann die global gültige Winkelgeschwindigkeit aus, gewinnt man eine Formel, die den Zusammenhang
zwischen Drehimpuls und Winkelgeschwindigkeit beschreibt.
r
r
r
r
L = ∑ Li = ∑ mi ⋅ ri2 ⋅ ω + ∑ mi ⋅ di ⋅ ri ⋅ ω
i
i
i
(6.6)
Der erste Summand besitzt die gleiche Struktur wie der entsprechende
Term in der Translationsmechanik. Er beschreibt das kapazitive Verhalten des Drehimpulsspeichers. Der Klammerausdruck ist denn auch das
in dieser Situation gültige Massenträgheitsmoment. Für den zweite Ausdruck gibt es bei der Translationsbewegung nichts Vergleichbares.
Rotation und Nutation
Rotiert ein starrer Körper um eine feste Achse, so sorgt der zweite Term
von (6.6) für eine andauernde Lagerbelastung. Im umgekehrten Fall,
wenn der Körper überhaupt nicht festgehalten wird, bleibt der Drehim-
Rotationsmechanik
Seite 115
pulsinhalt konstant. Dann erzwingt der zweite Ausdruck in (6.6) eine
Taumelbewegung, eine sogenannte Nutation. Bei der Nutation läuft die
Drehachse selber noch auf dem Mantel eines allgemeinen Kegels herum. Ein starrer Körper wird also bei konstantem Drehimpulsinhalt in
der Regel rotieren und nutieren. Eine Nutation kann mit einem einfachen Freihandversuch erzeugt werden. Dazu nimmt man einen quaderförmigen Tafelschwamm in beide Hände und wirft ihn aus dem
Handgelenk heraus hoch. Gelingt es, ihn um eine Diagonale rotieren zu
lassen, kann man direkt beobachten, wie die Rotationsachse selber noch
taumelt. Auf die kinematische Analyse dieser allgemeinen Kreiselbewegungen wollen wir nicht weiter eintreten. Der umgekehrte Fall, bei dem
die Achse festgehalten wird und der Drehimpuls sich ändert, wird in einem späteren Abschnitt behandelt.
Beispiel 27: Ein dünner Stab (Masse m, Länge l) rotiert mit konstanter Winkelgeschwindigkeit um eine festgehaltene
Drehachse. Die Achse durchstösst den Schwerpunkt des Stabes und schliesst mit diesem den Winkel β ein.
Man bestimme den Drehimpulsinhalt des Stabes.
Lösung 27:
Der Stab unterscheidet sich von der oben besprochenen Hantel durch seine kontinuierliche Massenverteilung. Bei einem Winkel von β = 90˚ kennen wir das Massenträgheitsmoment bereits: J = m·l2/12. Wird
nun der Winkel geändert, passiert das geometrisch Analoge wie bei der Hantel. Damit darf die Zerlegung
(6.6) direkt auf den Stab übertragen werden. Für die erste Klammer ist der Ausdruck J·sin2(β) und für die
zweite J·sin(β)·cos(β) einzusetzen. Die entsprechenden Winkelfunktionen habe ich direkt der Zeichnung
bei der Formel (6.5) entnommen.
? Kontrollfragen
10.)
11.)
12.)
13.)
14.)
15.)
16.)
Das auf einen Körper einwirkende, resultierende Drehmoment ist gleich der Änderungsrate
seines Drehimpulsinhaltes. Ist diese Aussage immer richtig?
Wird ein ausgedehnter Körper in lauter kleine Teile zerlegt, so kann der Impulsinhalt der einzelnen Fragmente in einen relativen und globalen Anteil zerlegt werden. Welcher der beiden
Impulsbestandteile ist für den im Körper gespeicherten Drehimpuls verantwortlich? Wie hängt
der globale Anteil mit der Geschwindigkeit des Körpers zusammen?
In Formel (6.6) wird zweimal summiert. Worin unterscheident sich die beiden Summationen?
Wann verschwindet in (6.6) der zweite Term?
Die Formel (6.6) zerlegt den Drehimpuls in zweit Teile. Wie ist diese Zerlegung zu interpretieren?
Ein rotationssymmetrischer Körper dreht sich um seine Symmetrieachse. In welche Richtung
zeigt der Drehimpulsvektor?
Wie bewegt sich ein rotierender, starrer Körper, der keinen Impuls enthält?
6.4 Die Schwenkbewegung
Die Vektorwertigkeit des Drehimpulses führt zu Erscheinungen, die dem Kippbewegung um die zgesunden Menschenverstand zuwiderlaufen. Betrachten wir dazu ein ro- Achse
tierenden Rades, das eine Schwenkbewegung ausführt. Sie können dieses Experiment mit einem Velorad selber ausführen, indem Sie es mit
beiden Händen an der Achse festhalten. Sie werden dabei feststellen,
Seite 116
Rotationsmechanik
L
y
ω
Ω·t
x
dass das Rad die Tendenz hat, seitlich auszubrechen. Das Phänomen
kann erklärt werden, indem man überlegt, was mit dem Drehimpuls passiert. Beim Wegdrehen des rotierenden Körpers sind zwei Sorten Drehimpuls beteiligt. Wird das bewegte Rad um neunzig Grad gekippt, gibt
der Körper bei geeignet gewähltem Koordinatensystem den x-Drehimpuls vollständig ab und nimmt die gleiche Menge y-Drehimpuls auf.
Verläuft die Kippbewegung mit konstanter Winkelgeschwindigkeit,
kann die Änderungsrate des Drehimpulses direkt hingeschrieben werden
Lx = L0 ⋅ cos(Ω ⋅ t );
Ly = L0 ⋅ sin(Ω ⋅ t );
das Drehmoment steht normal
zum Drehimpuls
Fig. 6. - 7: Dreht man ein
rotierendes,
reibungsarm
gelagertes Rad mit der Winkelgeschwindigkeit Ω weg, so
muss mit einem Drehmoment eingewirkt werden, das
in jedem Moment normal
zum Drehimpuls steht. Das
Drehmoment selber darf
man sich durch ein Kräftepaar ersetzt denken.
die Wirkebene des Kräftepaares steht normal zur Dreh- und
zur Kippebene
Mx = L«x = −Ω ⋅ L0 ⋅ sin(Ω ⋅ t )
M = L« = Ω ⋅ L ⋅ cos(Ω ⋅ t )
y
y
(6.7)
0
Die Winkelgeschwindigkeit der Kippbewegung habe ich mit einem
grossen Omega bezeichnet, um sie gegen die Winkelgeschwindigkeit
des rotierenden Rades abzugrenzen. Weil das Skalarprodukt aus dem
Momentanwert des Drehimpulses und der zugehörigen Änderungsrate
unabhängig von der momentanen Lage verschwindet, muss das resultierende Drehmoment normal zum Drehimpulsvektor stehen. Das Drehmoment verhält sich zum Drehimpuls wie die resultierende Kraft zum
Impuls bei der Kreisbewegung. Der Betrag der jeweiligen Speichergrösse bleibt in beiden Fällen erhalten und die Richtung ändert sich mit konstanter Winkelgeschwindigkeit. Die Analogie geht noch ein Stück
weiter: die jeweilige Änderungsrate kann betragsmässig als Produkt aus
der Grösse selber und der zugehörigen Winkelgeschwindigkeit geschrieben werden. Trotz dieser Strukturähnlichkeit bleibt ein kleiner, mehr begrifflicher Unterschied bestehen. Das Drehmoment entfaltet im
Gegensatz zur Kraft in Richtung des Vektors keine unmittelbar nachvollziehbare Wirkung. Deshalb wird die eigentliche Aussage von Formel (6.7) erst richtig klar, wenn man sich die ganze Situation in einer
Zeichnung vergegenwärtigt.
L
y
ω
Ω·t
M
L
M
x
Das rotierende Rad kann nur durch ein normal zum Drehimpuls stehendes Drehmoment weggedreht werden. Weil wir im Falle des Velorades
dieses Drehmoment über ein Kräftepaar erzeugen, dessen Wirkebene
sowohl normal zur Rotations- als auch normal zur Schwenkeben steht,
bereitet uns dieser Vorgang enorme Verständnisschwierigkeiten. Umgekehrt hat ein Kreisel die Tendenz, normal zur Wirkebene des angreifenden Kräftepaares auszuweichen. Diese eigenartige Dynamik hat eine ge-
Rotationsmechanik
Seite 117
wisse Ähnlichkeit mit dem Verhalten eines ungezogenen Kindes: jedem
Versuch, seine Achse in eine bestimmte Richtung zu drehen, widersetzt
sich der Kreisel mit einer seitwärts gerichteten Driftbewegung. Beim
Motorradfahren setzt man diese Verhalten unbewusst ein, um das Motorrad in die Kurve hineinzuführen. Fährt man zum Beispiel auf eine
Linkskurve zu, muss man kurz den rechten Teil des Lenkers gegen sich
ziehen. Infolge dieses Kicks kippt das Vorderrad gegen links und zieht
den Töff in die richtige Bahn.
Beispiel 28: Ein Schwungrad (Massenträgheitsmoment 4 kgm2) dient bei einem Auto als Energiespeicher. Die Achse
des Rades liege genau horizontal und der Drehimpulsvektor weise gegen das Heck. Mit welchem Drehmoment wirkt das Auto auf das mit 36’000 Umdrehungen pro Minute rotierend Schwungrad ein, wenn mit
108 km/h eine Kurve mit Radius 120 m gefahren wird?
Lösung 28:
Das Schwungrad speichert 2400 Nms Drehimpuls und das Auto dreht sich mit einer Winkelgeschwindigkeit von 0.25 s-1. Folglich muss ein Drehmoment von 600 Nm auf das Schwungrad einwirken. Der Drehmomentenvektor zeigt während der Kurvenfahrt radial nach ausssen, d.h. das Auto muss das Schwungrad
vorne anheben und hinten auf den Boden drücken. Vom Auto aus gesehen, drückt das Schwung dieses
vorne in den Boden hinein und hebt es hinten an.
? Kontrollfragen
17.)
Was haben die Schwenkbewegung eines rotierenden Kreisels und Kreisbewegung eines kleinen Körpers gemein?
18.) Wie stehen der resultierende Kraft- und der Impulsvektor bei der Kreisbewegung zueinander?
Wie ist bei der Schwenkbewegung eines Kreisels der Drehmomentenvektor gerichtet?
19.) Was passiert bei der Schwenkbewegung eines rotierenden Rades mit dessen Rotationsenergie?
20.) Sie halten ein rotierendes Rad vor sich hin, indem sie mit beiden Händen die vertikal stehende
Achse oberhalb des Lagers fest umfassen. Die linke Hand umklammere die Achse in der Nähe
des Rades und mit der rechten halten Sie das obere, freie Ende. Das Rad dreht sich von oben
gesehen im Gegenuhrzeigersinn. In welche Richtung zeigt der Drehimpusvektor? Wie müssen
Sie mit der rechten Hand gegen die Achse drücken, damit sich diese gegen rechts neigt?
6.5 Die dynamische Unwucht
Ein frei drehbar gelagerter Körper kann auf zwei Arten eine Unwucht statische und dynamische
erzeugen. Die eine, die statische Unwucht, entsteht, wenn die feste Ach- Unwucht
se den Massenmittelpunkt nicht durchstösst. Der rotierende Körper ändert dann seinen Impulsinhalt fortlaufend, wobei eine umlaufende,
betragsmässig konstante Kraft die Achsenlager belastet. Die dynamische Unwucht tritt dagegen auch auf, wenn der Massenmittelpunkt auf
der Drehachse liegt. Ihre Ursache ist in der fehlenden Symmetrie des
sich drehenden Körpers zu suchen: bei ungleicher Massenverteilung
zeigt der Drehimpulsvektor nicht unbedingt in die Richtung der Winkelgeschwindigkeit. Deshalb muss der radiale Teil des Drehimpulsinhaltes
über die Lager mit der Umgebung ausgetauscht werden, was ein betragsmässig konstantes, umlaufendes Drehmoment ergibt. Da wir uns
mit der statischen Unwucht schon im ersten Kapitel auseinandergesetzt
Seite 118
Rotationsmechanik
haben, wollen wir in diesem Abschnitt nur noch die dynamische eingehend studieren.
Unwucht mit zwei kleinen
Körpern
Für die nachfolgende Diskussion betrachten wir eine zylindrische
Scheibe, die ausgewuchtet auf einer fest gelagerten Achse umläuft. Zwei
kleine Körper können nun wahlweise an verschiedenen Punkten des
Umfanges befestigt werden. Liegen die beiden Zusatzkörper auf einer
gemeinsamen Matellinie der Scheibe, erzeugen sie eine statische Unwucht. Montiert man sie hingegen übers Kreuz auf die Scheibe, verursachen sie eine dynamische Unwucht. Beide Konfigurationen belasten die
Lager umso stärker, je schneller sich die Scheibe dreht. Bei der kreuzweisen Anordnung bleibt der Impuls des Gesamtkörpers immer gleich
Null bleibt und die Unwucht entsteht nur durch die Änderung des Drehimpulses selber. Zur Erklärung dieses Phänomens ziehen wir die Überlegungen von Abschnitt 6.3 bei
Fig. 6. - 8: Befestigt man an
einer ausgewuchteten Scheibe zwei kleine Körper, so lassen sich beide Formen der
Unwucht erzeugen. Die linke
Skizze zeigt die statische, die
rechte die dynamische Unwucht.
das Drehmoment der dynamischen Unwucht
Der Drehimpuls der beiden Zusatzkörper steht wie bei der Hantel normal zu ihrer Verbindungslinie. Sein Betrag ist gleich dem Impuls des
Einzelkörpers mal die gegenseitige Distanz. Dies folgt direkt aus Formel (6.4). Spaltet man nun diesen Drehimpuls in zwei Komponenten
auf, darf der achsiale Anteil zum Drehimpuls der Scheibe geschlagen
werden. Die radiale Komponente, die gleich dem Produkt aus Einzelimpuls und achsenparallelem Abstand der beiden Zusatzmassen ist, dreht
sich mit der Scheibe mit. Diese vektorwertige Grösse führt also eine andauernde Schwenkbewegung normal zur Winkelgeschwindigkeit aus.
Folglich lässt sich das damit zusammenhängende Drehmoment, mit dem
die Lager einwirken müssen, damit die Drehachse stabil bleibt, mit Hilfe von Formel (6.7) berechnen.
M = ω ⋅ Lr = ω ⋅ m ⋅ ω ⋅ r ⋅ d = m ⋅ r ⋅ d ⋅ ω 2
(6.8)
In Formel (6.8) steht r für den radialen Abstand der Körper von der
Drehachse. Mit d habe ich die achsenparallelen Distanz zwischen den
beiden Störmassen bezeichnet. Weil die Winkelgeschwindigkeit der
Kippbewegung von der Drehbewegung des Gesamtkörpers herrührt,
habe ich dafür wieder ein kleines statt ein grosses Omega geschrieben.
Das unwuchterregte Drehmoment wächst quadratisch mit der Winkelgeschwindigkeit, weil sowohl die radiale Drehimpulskomponente als auch
Schwenkbewegung linear mit dieser Grösse zunehmen.
auswuchten
Das Verhalten jedes nicht ausgewuchteten Rotators kann durch einen
Rotationsmechanik
Seite 119
einfachen Körper nachgebildet werden, der aus einer Scheibe und zwei
Zusatzkörpern besteht. Je nachdem, wie die beiden kleinen Massen angebracht werden, erzeugen diese mehr statische oder mehr dynamische
Unwucht. Umgekehrt kann ein nicht ausgewuchtetes Schwungrad in
seinem Laufverhalten verbessert werden, indem man auf dem Umfang
kleine Massen anbringt oder Material abträgt.
? Kontrollfragen
21.)
Ein Schwungrad weise eine rein dynamische Unwucht auf. Was passiert mit seinem Impulsinhalt? Was geschieht mit dem Drehimpulsinhalt?
22.) Ein um eine horizontale Achse laufendes Schwungrad weise eine Unwucht auf. Sie haben die
Möglicht, in beiden Lagern, die symmetrisch zum Rad angebracht sind, die Vertikalkomponente der Lagerkraft in Funktion der Zeit zu messen. Wie bestimmen Sie aus diesen beiden
Signalen die statische und die dynamische Unwucht?
23.) Wie hängt bei der dynamischen Unwucht die Lagerbelastung mit der Drehzahl zusammen?
6.6 Energie und Drehimpuls
Im Kapitel 3 haben wir gelernt, wie einem Drehimpulsstrom ein Ener- zugeordneter Energiestrom
giestrom zugeordnetet wird. Dieser Zusammenhang kann auf alle drei
Drehimpulssorten ausgedehnt werden. Dazu muss Formel (3.1) verdreifacht und mit den richtigen Indices versehen werden. Der resultiertende
Energiestrom ergibt sich dann als Summe über alle drei Anteile.
IW = ω x ⋅ I Lx + ω y ⋅ I Ly + ω z ⋅ I Lz
(6.9)
Der totale Energiestrom ist demnach gleich dem Skalarprodukt aus der
Drehimpulsstromstärke und der Winkelgeschwindigkeit der Fläche, bezüglich der die Stromstärke gemessen wird. Wie in der Translationsmechanik hängt das Ergebnis, die Stärke des Energietransportes, nicht von
der Einteilung des Drehimpulses in drei unabhängige Sorten ab. Mathematisch manifestiert sich diese Unabhängigkeit in der Invarianz des
Skalarproduktes gegenüber Drehungen des Koordinatensystems. Hinter
dieser Invarianz versteckt sich ein fundamentales, physikalisches Symmetrieprinzip: weil der Raum isotrop ist und somit keine Richtung zum
vornherein ausgezeichnet wird, hängen die grundlegenden Gesetze nicht
von der Orientierung des Koordinatensystems ab.
Bezieht man den Drehimpulsstrom auf einen bestimmten Körper, heisst die Leistung eines Drehmodie entsprechende Stromstärke Drehmoment. Den zugeordneten Ener- mentes
giestrom nennt man dann die Leistung eines Drehmomentes. Diese Leistung beschreibt den momentanen Energieaustausch zwischen System
und Umgebung.
r
r r
(6.10)
P( M ) = ω x ⋅ M x + ω y ⋅ M y + ω z ⋅ M z = ω ⋅ M
Die Leistung eines Drehmomentes weist ein positives Vorzeichen auf,
Seite 120
Rotationsmechanik
sobald das System Energie aufnimmt. Eine negatives Vorzeichen zeigt
dagegen einen Energieabfluss an. Stehen Drehmoment und Winkelgeschwindigkeit normal zueinander, erfolgt der Drehimpulsaustausch leistungsfrei. Einen leistungsfreien Austausch haben wir bei der Schwenkbewegung und bei der dynamischen Unwucht schon kennengelernt. Bei
beiden Bewegungstypen stehen Drehmoment und Winkelgeschwindigkeit normal zueinander, womit die Leistung des Drehmomentes verschwindet und die Bewegungsenergie des fraglichen Körpers konstant
bleibt.
die Rotationsenergie
Alle Radiusvektoren in der zweiten Summe von Formel (6.6) stehen
normal zur Drehachse. Deshalb verschwindet dieser Ausdruck vollständig, sobald man den Drehimpulsinhalt des starren Körpers skalar mit
seiner Winkelgeschwindigkeit multipliziert. Der übrigbleibende, erste
Summand von (6.6) besagt dann, dass dieses Skalarprodukt auch als
Massenträgheitsmoment mal das Quadrat der Winkelgeschwindigkeit
geschrieben werden darf. Durch Ausmultiplikation ergibt sich eine
Summe, deren Wert dem Zweifachen der kinetischen Energie aller Einzelteile entspricht. Folglich darf das Skalarprodukt aus Winkelgeschwindigkeit und Drehimpuls als das Doppelte der Rotationsenergie
angesehen werden.
1 r r
Wrot = ⋅ ω ⋅ L
(6.11)
2
Das Skalarprodukt in Formel (6.11) lässt sich rein geometrisch interpretieren: die Rotationsenergie des Kreisels ist gleich der halben Winkelgeschwindigkeit multipliziert mit der achsialen Komponente des Drehimpulses.
das Deviationsmoment
Die erste Summe in der Formel (6.6) beschreibt das eigentliche Massenträgheitsmoment. Diese Grösse legt zusammen mit der Winkelgeschwindigkeit die Rotationsenergie fest. Demnach hat die zweite
Summe nichts mit der Energie des starren Körpers zu tun. Sie ist nur für
die dynamische Unwucht verantwortlich und heisst Deviations- oder
Zentrifugalmoment. Das Deviationsmoment legt also zusammen mit der
Winkelgeschwindigkeit fest, wie gross die umlaufende Drehimpulskomponente ist.
Beispiel 29: Eine Hantel (Kugelmasse 7 kg, Kugelradius 6.5 cm, Stabmasse 3 kg, Stablänge 37 cm) rotiert schief eingespannt um eine feste Achse. Die Hantel dreht sich mit 600 Umdrehungen pro Minute und der Winkel zwischen der Symmetrieachse der Hantel und der Drehachse beträgt 50˚.
Wieviel Rotationsenergie speichert die Hantel?
Wie gross ist das Drehmoment, das auf die Hantel einwirken muss, damit diese stabil rotiert?
Lösung 29:
Die Rotationsenergie hängt nur mit dem achsialen Drehimpulsinhalt, der gleich dem Produkt aus Massenträgheitsmoment und Winkelgeschwindigkeit ist, zusammen. Bei der Berechnung des achsial gerichteten
Drehimpulses dürfen die entsprechenen Beiträge der einzelnen Teilkörper direkt aufaddiert werden. Die
beiden Kugeln tragen mit einem Bahn- und einem Eigendrehimpuls zum Gesamtwert bei, wobei der
achsiale Bahndrehimpulsanteil nur vom Durchmesser und nicht von der Lage der Kreisbahnen abhängig
Rotationsmechanik
Seite 121
ist. Den Eigendrehimpuls des Stabes haben wir weiter oben schon berechnet (Beispiel 27).
2
m
La = {2 ⋅ mK ⋅ [ ⋅ r 2 + ( s ⋅ sin β )2 ] + s ⋅ (ls ⋅ sin β )2} ⋅ ω = 33.6 Nms
5
12
Die Distanz Kugelmittelpunkt-MMP, die in der Berechnungsformel mit s abgekürzt wird, beträgt 25 cm.
Zur Berechnung der Rotationsenergie ist der achsiale Drehimpulsanteil nochmals mit der halben Winkelgeschwindigkeit zu multiplizieren. Dies ergibt 2113 Joule.
Der radiale oder variierende Drehimpulsinhalt setzt sich aus einem Beitrag des Stabes und aus je einem
Anteil der beiden Bahndrehimpulse der Kugeln zusammen.
Lr = {2 ⋅ mk ⋅ s 2 +
ms 2
⋅ ls } ⋅ sin β ⋅ cos β ⋅ ω = 28.1Nms
12
Für den Betrag des umlaufenden Drehmomentes berechnet man mit Hilfe von Formel (6.7) einen Wert von
1767 Nm.
? Kontrollfragen
24.)
Kann ein starrer Körper mit der Umgebung über längere Zeit Drehimpuls austauschen, ohne
dabei seinen Energieinhalt zu ändern?
25.) Geben Sie Rotationsenergie in Abhängigkeit des Drehimpulses und der Winkelgeschwindigkeit an?
26.) Wie hängt das Drehmoment der dynamischen Unwucht mit dem Deviationsmoment zusammen?
27.) Eine dünner Stab rotiert schief eingespannt um eine feste Achse. Wie berechnet sich das Massen- und wie das Deviationsmoment?
6.7 Die klassische Darstellung des Drehimpulses
Jeder Planet, der um die Sonne fällt, speichert zusammen mit dieser der Flächensatz
Drehimpuls, d.h. beide Körper bilden eine rotierende Hantel mit zeitlich
veränderlicher Gestalt. Weil die Masse der Sonne einige Zehnerpotenzen grösser ist als die Trägheit aller Begleitobjekte, wird das Zentralgestirn kaum herumgewirbelt. Sie bildet das materielle Bezugssystem, auf
das die Bewegung der andern Körper zu beziehen ist. Dies hat Nikolaus
Kopernikus (1473 - 1543) geahnt und in seiner wegweisenden Schrift
„De revolutionibus orbium coelestium“ ausführlich dargelegt. Johannes
Kepler (1571 - 1630), kaiserlicher Mathematiker und Hofastronom Rudolfs II., kombinierte diese kopernikanische Weltsicht in jahrelanger Arbeit mit den astronomischen Daten seines Vorgängers Tycho Brahe.
Dabei hat er drei fundamentale Gesetzmässigkeiten gefunden. Das
zweite dieser Gesetze, der Flächensatz, besagt, dass der Verbindungsstrahl Planet Sonne unabhängig von der momentanen Distanz der beiden Körper in gleichen Zeiten gleiche Flächenstücke überstreicht.
Hinter dieser Aussage steckt, wie mit Hilfe einer Skizze leicht gezeigt
werden kann, die Drehimpulserhaltung des Systems Planet-Sonne.
Das System Planet-Sonne speichert Drehimpuls. In der klassischen Dar- der Bahndrehimpuls eines
stellung wird diese Grösse dem sich stärker bewegenden Körper, also materiellen Punktes
Seite 122
Rotationsmechanik
dem Planeten, alleine zugeordnet. Man redet dann vom Bahndrehimpuls
der Erde, der Venus oder des Jupiters. Solange man sich nur mit stark
asymmetrischen Zweikörpersystemen beschäftigt, stimmen beide Betrachtungsweisen überein. Die Sonnenmitte ist dann Bezugspunkt und
Trägheitszentrum in einem. Mit der Entwicklung der Mechanik ist die
objektzentrierte Sicht weiter verfestigt und damit die Mengenartigkeit
des Drehimpulses in den Hintergrund gedrängt worden. Im Rahmen der
klassischen Mechanik darf nun jedem materiellen Objekt bezüglich irgendeines Raumpunktes ein Bahndrehimpuls zugeschrieben werden.
Mit dieser Definition werden sechs skalare Grössen willkürlich festgelegt, d.h. drei frei gewählte Lagekoordinaten und drei auf ein Beobachtersystem bezogene Geschwindigkeitskomponenten nehmen Einfluss
auf die absolute Grösse des Drehimpulses. Die klassische Formulierung
der Mechanik vermengt mit der Definition des Bahndrehimpulses Geometrie und Dynamik. Es ist nun meine Aufgabe, zu zeigen, dass die
klassische Betrachtungsweise die gleichen Ergebnissen liefert wie die
systemdynamische.
klassischer und systemdynamischer Bahndrehimpuls
Jeder starre Körper, der sich durch den Raum bewegt, darf gedanklich in
viele sehr kleine Teile zerlegt werden. Die klassische Darstellung weist
nun jedem Teilkörper einen Bahndrehimpuls zu. Die entsprechende Formel sieht gleich aus wie der Ausdruck in (6.4), nur ist der Ortsvektor auf
den Ursprung des frei gewählten Koordinatensystems und nicht zwingend auf den Gesamtmassenmittelpunkt zu beziehen. Schreibt man nun
den Impuls gemäss dem kapazitiven Gesetz als Produkt von Masse und
Geschwindigkeit, kann sowohl der Orts- als auch der Geschwindigkeitsvektor in zwei Teile zerlegt werden. Die erste Komponente des Ortsvektors zeigt vom Ursprung des Koordinatensystems zum MMP des starren
Körpers, die zweite beschreibt den Abstand MMP-Teilkörper. Analog zu
dieser Idee darf der Geschwindigkeitsvekor in einen globalen und einen
relativen Anteil aufgespalten werden, wobei der globale die Bewegung
des des Gesamtsystems beschreibt. Zerlegt man die Orts- und die Geschwindigkeitsvektoren aller Einzelteile konsequent in ihre beiden
Komponenten und zählt sodann alle Bahndrehimpulse zusammen, verschwindet die Summe bei zwei der vier Beiträge.
r
r r
r r
r r
L = ∑ pi × si = ∑ mi ⋅ [(vi′ + vMMP ) × (ri ′+ rMMP )]
i
i
r
r r
r
= ∑ mi ⋅ (vi′ × ri ′) + m ⋅ (vMMP × rMMP )
(6.12)
i
Relativgrössen sind in (6.12) mit einem Apostroph gekennzeichnet worden. Die zwei Terme sind weggefallen, weil die gewichtete Summation
über alle Relativgeschwindigkeiten bzw. über alle Relativdistanzen definitionsgemäss verschwindet. Der erste Ausdruck von (6.12) ist mit unserer Beschreibung des Drehimpulses identisch. Damit habe ich gezeigt,
dass die klassische Definition bis auf einen Term, der den Bahndrehimpuls des Gesamtsytems liefert, mit der systemdynamischen identisch ist.
Dieser Zusatzterm, der mit der freien Wahl des Bezugssystems und dessen Koordinatenursprungs zusammenhängt, darf als additive Konstante
Rotationsmechanik
Seite 123
angesehen werden, dem auch bei der klassischen Formulierung der Mechanik keine weitere Funktion zukommt.
? Kontrollfragen
28.) Welche Information steckt im zweiten Kepler-Gesetz (Flächensatz) drin?
29.) Worin liegt der Unterschied zwischen der klassischen und der systemdynamischen Definition
des Drehimpulses?
6.8 Die Hauptachsen
Rotiert ein starrer Körper um eine festgehaltene Achse, so kann sein Trägheits- und DeviatinsmoDrehimpuls in einen achsialen Anteil, der während der Rotations kon- ment
stant bleibt, und in einen radialen, der sich fortwährend ändert, zerlegt
werden. Beide Komponenten sind proportional zum Betrag der Winkelgeschwindigkeit. Der eine Proportionalitäsfaktor, das Massenträgheitsmoment, hängt nur von der radialen Massenverteilung ab, wogegen bei
der Berechnung des zweiten, des Deviationsmomentes, auch noch die
achsialen Verteilung berücksichtigt werden muss.
r
r
(6.13)
J = ∑ mi ⋅ ri2
D = ∑ mi ⋅ di ⋅ ri
i
i
Der Radiusvektor ri zeigt von der Drehachse zum Element mit der Nummer i. Mit di habe ich wie schon in Formel (6.6) den längs der Achse gemessene Abstand des Teilkörpers i vom Gesamtmassenmittelpunkt bezeichnet.
Das Vektorzeichen über dem Buchstaben D in (6.13) ist nicht ganz kor- das Massenträgheitsmoment
rekt. Lässt man nämlich den Körper um eine andere Achse rotieren, als Tensor
bleibt weder das Massenträgheitsmoment invariant noch transformiert
sich das Deviationsmoment wie ein Vektor. Mathematisch sauber lässt
sich das Problem nur lösen, wenn man beide Grössen zu einem einzigen
Objekt, einem sogenannten Tensor, zusammenfasst. Tensoren transformieren sich wie das allgemeine oder äussere Produkt zweier Vektoren.
Das tensormässige Verhalten des Massenträgheitsmomentes kann schon
bei einem einfachen Stab beobachtet werden: aus der Lösung von Beispiel 27 ist zu entnehmen, dass sowohl das Massenträgheitsmoment als
auch das Deviationsmoment des Stabes über ein Produkt von zwei trigonometrischen Funktionen mit dem Winkel zur Drehachse zusammenhängen. Tensoren zeichnen sich nun aber gerade dadurch aus, dass sich
ihre Komponenten bei Drehung quadratisch mit dem Winkel verändern.
Jeder beliebige Körper besitzt mindestens drei zueinander normal ste- die Hauptmassenträgheitsmohende Achsen, bezüglich denen die Deviationsmomente verschwinden. mente
Diese ausgezeichneten Richtungen nennt man Hauptachsen und die zugehörigen Systemeigenschaften heissen Hauptachsenträgheitsmomente.
Sind die drei Hauptachsenträgheitsmomente sowie die zugehörige Lage
Seite 124
Rotationsmechanik
der Hauptachsen bekannt, können Trägheits- und Deviationsmomente
bezüglich einer beliebigen Drehrichtung berechnet werden. Körper, die
eine hohe Symmetrie aufweisen, verfügen in der Regel über mehr als
nur drei deviationsmomentenfreieAchsen. So zeichnet bei einem kugelsymmetrischen Körper jede Richtung eine Hauptachse aus und beim
Zylinder darf jeder Durchmesser, der durch dessen MMP geht, als
Hauptachse angesehen werden.
Ein beliebiger Quader mit homogener Massenverteilung, weist genau
drei Hauptachsen mit drei verschiedenen Massenträgheitsmomenten
auf. Die zugehörige Berechnungsformel sieht gleich aus wie beim dünnen, langen Stab. Nur ist statt der Stablänge die entsprechende Seitendiagonale einzusetzen.
der Quader
m ⋅ (b 2 + c 2 )
Ja =
12
die Stabilität der Hauptachsen
in
sta
bi
l
stabil
stabil
zyklisch Vertauschen
(6.14)
Rotiert der Quader um die Achse mit dem grössten Massenträgheitsmoment, speichert er bei vorgegebenem Drehimpuls die kleinstmögliche
Energiemenge. Dreht er sich um die Achse mit dem kleinsten Trägheitsmoment, hat die Rotationsenergie bei festgehaltenem Drehimpuls ein
Maximum. Weil bei einem isolierten Körper jede Abweichung von diesen beiden Hauptachsen entweder einen verbotenen Energieüberschuss
oder einen unerlaubten Mangel produzieren würde, rotiert ein hochgeworfner Klotz in beiden Richtungen stabil. Falls man den Quader aber
um die Hauptachse mit dem mittleren Trägheistmoment drehen lässt,
verläuft die Bewegung ziemlich anders. Statt schön brav zu rotieren, trudelt der Klotz nur so herum. Die kleinste Strörung lässt die Drehachse
einen irren Tanz aufführen. Dieses Verhalten ist nur möglich, weil bei
vorgegebenem Drehimpuls und festgehaltener Energie ein ganzes Kontinuum von möglichen Drehachsen zur Verfügung steht. Diese Stabilitätsaussage gilt nun nicht nur für Quader. Sobald ein starrer Körper frei
um die Hauptachse mit dem mittleren Trägheitsmoment rotiert, kommt
er ins trudeln.
?Kontrollfragen
30.)
Ein Körper, der um die Hauptachse mit dem mittleren Trägheistmoment rotiert, erzeugt eine
dynamische Unwucht. Ist diese Aussage richtig oder falsch?
31.) Wie sind die Hauptachsen bei einem homogenen, geraden Kreiszylinder gerichtet?
Zusammenfassung von Kapitel 6
In der Natur existieren drei Sorten Drehimpuls, die sich wie die Komponenten eines Vektors transformieren. Tauscht ein System Drehimpuls mit der Umgebung aus, ist jede Komponente separat zu
bilanzieren. Eine Umwandlung der einen Sorte in die andere ist nicht möglich.
Rotationsmechanik
Seite 125
Häufig muss einer Kraft ein Drehmoment zugeordnet werden. Mit dem Impuls zusammen wird also
auch noch Drehimpuls ausgetauscht. Das Drehmoment berechnet sich als Vektorprodukt von Kraft
und Distanzvektor. Letzterer zeigt vom Mittelpunkt der Kraftangriffsfläche bis zum MMP des
Gesamtsystems. Bei einem Kräftepaar ist das zugehörige Drehmoment gleich dem Vektorprodukt
aus der einen Kraft und dem Abstand der beiden Kraftangriffspunkte. Die Vektoren sind so zu wählen, dass das Ergebnis, das Drehmoment, rechthändig zum Wirksinn der beiden Kräfte steht.
Der Drehimpulsinhalt eines starren Körpers hängt bei vorgegebener Drehzahl von der Drehachse ab
und kann mit Hilfe von zwei Systemgrössen beschrieben werden. Die eine, das Massenträgheitsmoment, ergibt zusammen mit der Winkelgeschwindigkeit den achsial gerichteten Drehimpulsanteil.
Die zweite Grösse, das Deviationsmoment, legt den radialen Drehimpuls fest. Dazu muss das Deviationsmoment mit dem Betrag der Winkelgeschwindigkeit multipliziert werden. Bei festgehaltener
Drehachse rotiert das bezüglich des Körpers unveränderliche Deviationsmoment mit und sorgt dafür,
dass der radiale Drehimpulsvektor andauernd seine Richtung ändert. Der ganze Drehimpulsinhalt
eines Rotators kann also immer in zwei Komponenten aufgespalten werden. Der achsiale Anteil
bleibt konstant und der radialen läuft mit der vorgegebenen Winkelgeschwindigkeit um. Weil die
radiale Komponente eine gleichförmige Kreisbewegung ausführt, steht das zugehörige Drehmoment
normal zur Drehachse und normal zum sich ändernden Drehimpulsvektor. Sein Betrag ist gleich dem
Produkt aus den Beträgen des radialen Drehimpulsanteils und der Winkelgeschwindigkeit. Dieser
Zusammenhang gilt auch beim Abkippen eines Schwungrades. Nur muss dort der gesamte Drehimpuls mit der Winkelgeschwindigkeit der Schwenkbewegung multipliziert werden.
Ein Körper, der sich um eine feste Achse frei drehen kann, erzeugt zwei Arten von Unwucht. Bei der
statischen Unwucht verläuft die Mittellinie nicht durch den MMP. Die Achse wirkt dann mit einer
umlaufenden Kraft auf den Körper ein, deren Betrag quadratisch mit der Drehzahl anwächst. Bei der
dynamischen Unwucht weist der Körper bezüglich der Achse ein nicht verschwindendes Deviationsmoment auf. In diesem Fall muss die Achse mit einm umlaufenden Drehmoment einwirken, dessen
Betrag ebenfalls mit der Quadrat der Winkelgeschwindigkeit anschwillt.
Die Rotationsenergie ist gleich der Hälfte des Skalarprodukts aus Drehimpuls und Winkelgeschwindigkeit. Zusammen mit dem entsprechenden Kapazitivgesetz ergibt dies die gleiche Formel wie bei
der ebenen Betrachtung. Nur ist hier das Massenträgheitsmoment nicht für den ganzen Drehimpulsinhalt verantwortlich. Mit dem Drehimpuls wird oft auch Energie transportiert. Üblicherweise
schreibt man diesen Transport dem an der Systemoberfläche definierten Drehmoment zu. Diese Leistung eines Drehmomentes berechnet sich als Skalarprodukt aus Drehmoment und Winkelgeschwindigkeit. Weil bei der Schwenkbewegung eines Schwungrades oder bei der dynamischen Unwucht
das Dremoment genau normal zur Winkelgeschwindigkeit steht, wird bei diesen Prozessen keine
Energie ausgetauscht.
Der Massenmittelpunkt eines im Vakuum geworfenen Körpers bewegt sich entlang der sogenannten
Wurfparabel. Diese Bewegung verläuft unabhängig vom Rotationszustand des geworfenen Körpers.
Würde man selber den Wurf mitmachen, könnte man erkennen, dass sich die Drehbewegung aus
einer Rotation um eine momentane Achse und aus einer Bewegung der Achse selber zusammensetzt.
Die Taumelbewegung der Achse stellt sich nicht ein, wenn man den Körper so hochwirft, dass er um
eine der beiden stabilen Hauptachsen rotiert. Dann kann die Drehachse nicht ausweichen, ohne dass
entweder die Impuls- oder die Energieerhaltung verletzt würde. Die Rotation um die Hauptachse mit
dem mittleren Trägheitsmoment ist dagegen instabil. Diese Insabilität ist nur beim freien Körper
erkennbar. Beim starr gelagerten Körper erzeugt sie dagegen keine dynamische Unwucht.
Seite 126
Rotationsmechanik
?! Lernzielkontrolle
Einem Kräftepaar oder einer Einzelkraft einen Drehmomentenvektor zuordnen können.
1.)
2.)
3.)
4.)
5.)
Das Drehmoment berechnet sich aus der Kraft und dem zugehörigen Abstand. Muss man nun
beim Drehmoment eines Kräftepaares nur eine Kraft ins Kreuzprodukt einsetzen oder müssen
vorgängig beide Kräfte zusammengezählt werden?
Wie stehen der Drehsinn (Wirkrichtung) eines Kräftepaares und das zugehörige Drehmoment
zueinander?
Einer Einzelkraft soll ein Drehmoment zugeordnet werden. Von wo nach wo zeigt der
Abstandvektor, der in das entsprechende Vektorprodukt einzusetzen ist?
Wie geht die Lage der Drehachse in die Berechnung des Drehmomentes ein?
Gegeben sei die Grösse, die Richtung und die Wirklinie einer Kraft und die Lage des Schwerpunktes. Wie berechnen Sie rein formal das begleitende Drehmoment (Grösse und Richtung)?
Wissen, wie die räumliche Drehimpulsbilanz formuliert wird.
6.)
7.)
8.)
Wie hängt der Drehimpuls mit dem resultierenden Drehmoment zusammen?
Sie kennen das resultierende Drehmoment. Können Sie damit die Winkelbeschleunigung des
Körpers berechnen?
Formulieren Sie die Momentanbilanz für die vektorwertige Grösse Drehimpuls.
Die Energiebilanz für einen starren Körper formulieren können.
9.) Wann verschwindet die Leistung eines Drehmomentes?
10.) Bei einem starren Körper sind alle einwirkenden Kräfte und alle Drehmomente bekannt. Wie
berechnet man rein formal die Änderungsrate der Bewegungsenergie?
11.) Einem starren Körper können drei Energiespeicher (kinetische, Rotations- und Gravitationsenergie) zugeordnet werden. Wie lassen sich diese drei Speicher gegeneinander abgrenzen?
Welcher Kraft darf bei dieser Betrachtungsweise keine Leistung zugewiesen werden?
Die Mechanik der Schwenkbewegung verstehen.
12.)
Wie stehen der Drehimpuls, die Schwenkebene und das resultierende Drehmoment bei einer
Kippbewegung eines rotierenden Rades zueinander?
13.) Wie berechnet man bei der Schwenkbewegung das dazu notwendige Drehmoment?
Die Lagerbelastung bei einer dynamischen Unwucht bestimmen können.
14.) Wann liegt eine rein dynamische Unwucht vor?
15.) Ein unsymmetrischer Quader, der so eingespannt ist, dass die Drehachse durch die Körperdiagonale geht, belastet die Lager auch bei einer Rotation mit konstanter Drehzahl. Was passiert
dabei mit dem Drehimpuls? Wie sieht der zeitliche Verlauf der Lagerbelastung aus?
Die Begriffe Deviationsmoment und Hauptachsen verstehen.
16.) Mit welcher Einheit wird das Deviationsmoment gemessen?
17.) Was sind Hauptachsen? Wieviele Hauptachsen weist jeder starrer Körper mindestens auf? Was
passiert, wenn ein fest eingespannter Körper um eine Achse rotiert, die nicht Hauptachse ist?
Rotationsmechanik
Seite 127
A Übungsaufgaben
200
300
Ein 600 mm langer Draht (Durchmesser 10 mm, Dichte
7.8 g/cm3), der zweimal rechtwinklig abgebogen worden
ist, rotiert mit 3000 U/min um eine feste Achse, die durch
das Symmetriezentrum des Körpers geht und parallel zu
den beiden Schenkeln ausgerichtet ist.
Wie werden die beiden Lager belastet? Die geometrischen
Daten können Sie der nebenstehenden Skizze entnehmen.
200
1.)
2.)
Eine Hantel, bestehend aus zwei Kugeln (Durchmesser 10
cm, Masse je 4 kg) und einem Verbindungsstab (Länge 40
cm, Masse 1.5 kg) ist auf einer Drehbank fest eingespannt
worden.
Der Verbindungsstab und die Drehachse, die durch den MMP der Hantel geht, schliessen einen
Winkel von 65˚ ein. Wie gross ist das Drehmoment, das bei 500 Umdrehungen pro Minute auf
die Hantel einwirkt?
3.)
Eine Metallkugel (Masse 4 kg, Durchmesser 10 cm) rotiert mit einer Winkelgeschwindigkeit
von 100 s-1 um eine Achse, die durch die Kugelmitte verläuft und kardanisch gelagert ist. Die
kardanische Lagerung garantiert, dass die Drehachse selber in jede beliebige Richtung weggedreht werden kann.
Wie stark muss das betragsmässig konstant gehaltene Drehmoment sein, damit sich die Achse
in einer Minute um 90˚ dreht?
4.)
Die Achse eines Schwungrades (Massenträgheitsmoment 120 kg·m2), das sich mit 3000 Umdrehungen pro Minute dreht, soll eine harmonische (zeitlich sinusartige) Schwenkbewegung in
einer Ebene ausführen. Die beiden Umkehrrichtungen sollen einen Winkel von 90˚ einschliessen und die volle Schwingung soll zehn Sekunden dauern.
Beschreiben Sie den Drehimpulsinhalt des Schwungrades in Funktion der Zeit. Führen Sie
dazu ein Koordinatensystem ein, dessen x-Achse in Richtung der “Gleichgewichtslage“ der
Kippschwingung zeigt.
Wie gross ist der Maximalwert des die Kippschwingung erzeugenden Drehmomentes?
5.)
Eine horizontal ausgerichtete Hantel (Durchmesser der Kugeln 10 cm, Kugelmassen 4 kg und
4.1 kg, Länge des Verbindungsstab 40 cm, Durchmesser des Verbindungsstabes 2.5 cm, Stabmasse 1.5 kg), rotiere mit 3000 Umdrehungen pro Minute um die Längsachse. Das Lager, das
die Hantel festhält, weist praktisch keine Reibung auf und ist kardanisch montiert, d.h. die
Achse selber kann sich in jede beliebig Richtung frei drehen. Das infolge der ungleich schweren Kugeln über das Gravitationsfeld einwirkende Drehmoment erzeugt nun eine Präzession.
Wir beobachten, dass die anfänglich horizontal ausgerichtete Hantel leicht abkippt und sich
dann langsam um die vertikale Achse dreht.
Ein rechthändiges Korrdinatensystem mit vertikaler z-Achse teilt den Drehimpuls in drei Sorten auf. Welche Sorte Drehimpuls kann nicht über das Gravitationsfeld zufliessen?
Mit welcher Winkelgeschwindigkeit wird die Hantel präzessieren?
Durch die Präzessionsbewegung wird z-Drehimpuls gespeichert. Woher kommt diese Drehimpuls?
Schätzen Sie ab, um welchen Winkel sich die Hantel bei Beginn der Präzession neigt.
Seite 128
Rotationsmechanik
6.)
Vier Metallkugeln (Durchmesser 10 cm, Massen je 4 kg) sind so zusammengefügt worden,
dass ihre Mittelpunkte nach den Ecken eines regulären Tetraeders ausgerichtet sind. Die Kugeln berühren sich an ihren Oberflächen. Das ganze Tetraeder rotiere nun mit 400 Umdrehungen pro Minute um eine festgehaltene, vertikal ausgerichtete Achse, die durch zwei der vier
Kugelzentren verläuft.
Mit welcher Kraft und mit welchem Drehmoment müssen die Lager auf den rotierenden Körper einwirken, damit sich dieser weiterhin gleichmässig dreht?
7.)
Bei einer kreisförmige Scheibe liefert die Scheibenachse eine Hauptachse. Das zugehörige
Massenträgheitsmoment ist gleich der halben Masse multipliziert mit dem Quadrat des Radius.
Alle weiteren Hauptachsen werden von den Durchmessern der Scheibe gebildet. Das Massenträgheitsmoment ist dann aber nur noch halb so gross. Nun wählt man eine Drehachse, die
durch den Massenmittelpunkt der Scheibe geht und mit der Scheibenachse den Winkel β einschliesst.
Ersetzen Sie die Scheibe so durch vier kreuzförmige angeordnete Punkte mit je einem Viertel
der Scheibenmasse, dass diese bezüglich zwei speziell zu wählenden Achsen die gleichen
Massenträgheitsmomente aufweisen wie die Scheibe.
Berechnen Sie nun das Massenträgheitsmoment und das Deviationsmoment der Scheibe in allgemeiner Lage.
8.)
Auf einer Achse sind zwei kreisrunde Scheiben (Durchmesser 400 mm, Masse 3 kg) aus drei
Millimeter dickem Blech so befestigt worden, dass deren Flächennormale mit der Achse je einen Winkel von 45˚ einschliessen. Die beiden Metallteller neigen sich einander zu und ihre
Zentren fluchten mit der Achse.
Ist der Körper, der durch die zentrale Achse und die beiden Metallscheiben gebildet wird, ausgewuchtet?
Wie gross ist die maximale Stromstärke des in der Achse zwischen den beiden Scheiben fliessenden Drehimpulses bei einer Drehzahl von 2400 Umdrehungen pro Minute?
9.)
Bei einer rechteckigen, dünnen Platte (Masse 12 kg, Länge 500 mm, Breite 200 mm, Dicke 15
mm) bilden die beiden Symmetrieachsen je eine Hauptachse. Die zugehörigen Trägheitsmomente berechnen sich nach der Formel J = m·l2/12.
Ersetzen Sie die Platte durch vier kreuzförmig angeordnete Punkte mit je einem Viertel der
Scheibenmasse und bestimmen Sie dann das Massen- und das Deviationsmoment bei einer Rotation um die Scheibendiagonale.
10.) Ein Auto, das mit 108 km/h durch eine Kurve (Kurvenradius 400 m) fährt, verwendet als Energiezwischenspeicher ein Schwungrad (zylinderförmig, Durchmesser 60 cm, Masse 50 kg). Das
Schwungrad dreht sich während der Kurvenfahrt mit 16’000 Umdrehungen pro Minute und
seine Achse zeigt in Fahrtrichtung.
Wieviel Bewegungsenergie enthält das Schwungrad?
Mit welcher resultierenden Kraft wirkt das Auto auf das Schwungrad ein?
Wie gross ist das Drehmoment, mit dem das Schwungrad gehalten werden muss?
Rotationsmechanik
11.) Beim Kollergang läuft eine Walze an einer
horizontalen Achse im Kreis herum und zerquetscht dabei das Mahlgut. Wir vereinfachen das Problem zu einem Rad (Durchmesser 1.2 m, Dicke 20 cm, Masse 600 kg),
das an einer zylinderförmigen Achse (Länge
1.5 m, Masse 100 kg) befestigt ist. Die Reibung soll vernachlässigt werden.
Mit welcher Kraft muss das freie Ende der
Achse festgehalten werden?
Wie gross ist die Normalkraft, mit welcher
der Boden auf das Rad einwirkt?
Seite 129
1300
12.) Auf einem geraden Kreiskegel (Durchmesser der Grundfläche 200 mm, Höhe 100 mm), der
auf einer horizontalen Unterlage steht, rollt ein zweiter, gleich grosser (Masse 8 kg) mit zwanzig Umdrehungen pro Minute ab. Beide Kegelspitzen bleiben während der ganzen Bewegung
dauernd am gleichen Ort, d.h. ein Durchmesser des umlaufenden Kegels berührt andauernd die
Unterlage.
Mit welcher Kraft und mit welchem Drehmoment muss man in einem beliebigen Moment auf
den bewegten Kegel einwirken, damit er die vorgesehene Bewegung auch ausführt?
13.) Wieder läuft ein gerader Kreiskegel (Masse 8 kg) auf einem gleich grossen ab, der mit lotrechter Achse auf einer horizontalen Unterlage steht. Diesmal weisen die Kegel bei einer Höhe von
160 mm einen Basisdurchmesser von ebenfalls 160 mm auf.
Berechnen Sie das Drehmoment, mit dem man auf den bewegten Kegel einwirken muss, damit
er schön gleichmässig mit 600 Umdrehungen pro Minute auf dem ruhenden abrollt.
14.
Bei einem Gyrobus dreht sich im Boden des Fahrzeuges ein grosses Schwungrad mit vertikaler
Achse und liefert die für den Betrieb notwendige Energie. An jeder Haltestelle wird das Rad
über einen eingebauten Elektromotor wieder in Schwung gesetzt. Das Schwungrad darf in erster Näherung als kurzer Hohlzylinder (Aussenradius 1.2 m, Innendradius 1m) mit einer Masse
von zwei Tonnen angesehen werden.
Wieviel Energie kann dieses ringförmige Rad maximal speichern, wenn die Zugspannung bei
einer Dichte von 7.8 kg/dm3 den Wert von 100 N/mm2 nicht überschreiten darf?
Der Bus durchfahre kurz nach einer Haltestelle eine Bodenwelle, wodurch der Wagenkasten
eine Schaukelbewegung mit einer Winkelgeschwindigkeit von höchstens 0.1 rad/s vollführt.
Welchen Maximalbetrag weist das Drehmoment auf, mit dem das Schwungrad dabei auf den
Bus einwirken?
15.) Die Sonne wirkt über das Gravitationsfeld mit einem Drehmoment auf die abgeplattete Erde
ein, d.h. sie versucht die gegenüber ihrer Umlaufbahn geneigte Erde aufzurichten. Infolge dieser Wirkung beschreibt die Erdachse vom Fixsternenhimmel aus gesehen einen Kegel. Das
Wegweichen hat zur Folge, dass sich die Jahreszeiten gegenüber der Lage der Erde auf ihrer elliptischen Bahn fortlaufend verschieben. Eine Präzession (so nennt man dieses Kreiselphänomen) um den vollen Drehwinkel dauert ungefähr 26000 Jahre.
Berechnen Sie das Drehmoment, mit dem die Sonne im Mittel auf die Erde einwirkt? Weil diese Einwirkung jahreszeitlichen Schwankungen unterworfen ist, können wir aus der Bewegung
der Erdachse nur den Mittelwert des gravitativen Drehmomentes berechnen. Die Erde, die sich
in 23 Stunden und 56 Minuten einmal um ihre Achse dreht, darf als Kugel mit einem Radius
Seite 130
Rotationsmechanik
von 6370 km und einer Masse von 6·1030 kg modelliert werden.
16.) Die Präzession der Erde kann in einem einfachen Demon400 mm
stationsexperiment veranschaulicht werden. Dazu lässt
man eine Scheibe (Masse 2 kg, Durchmesser 20 cm) mit
3000 Umdrehungen pro Minute auf einem Kugellager um
eine horizontal ausgerichtete Achse (Masse 500 g, Länge
48 cm rotieren. Die Achse selber ist so gelagert, dass sie
eine Schwenkbewegung in der Vertikalen und eine Drehbewegung in der Horizontalen ausführen kann. Die rotierende Scheibe, die 20 cm versetzt vom beweglichen Lager
2 kg
2 kg
der Achse entfernt montiert ist, wird durch eine gleich
grosse, symmetrisch angebrachte Scheibe im Gleichgewicht gehalten.
Wird nun auf der ruhenden Scheibe ein Übergewicht von 100 g angebracht, neigt sich die horizontale Achse um einen kleinen Winkel und beginnt sich langsam im Kreis gerumzubewegen.
Berechnen Sie die Winkelgeschwindigkeit dieser Präzessionsbewegung und den Neigungswinkel in guter Näherung.
17.) Auf eine Eisenkugel (Radius 5 cm, Masse 4 kg), die reibungsfrei gelagert ist und sich mit 6000
Umdrehungen pro Minute dreht, wirke ein Drehmoment von 0.04 Nm ein, das betragsmässig
konstant bleibt und dessen Leistung immer gleich Null ist. Drehmoment und Drehimpulsvektor bilden zudem eine Ebene, die sich im Laufe der Zeit nicht ändern soll.
Was passiert unter diesen Umständen mit der Kugel? Wie lange dauert es, bis die Kugel wieder
im gleichen Rotationszustand ist?
18.) Eine Eisenkugel (Radius 5 cm, Masse 4 kg) ist so in ein stabiles und gut gelagertes Pendel eingebaut worden, dass sie sich um eine Achse frei drehen kann, die fest mit dem schwingenden
System verbunden ist. Bei ruhendem Pendel befindet sich die Kugelmitte einen halben Meter
unterhalb des Drehpunktes, die Drehachse ist genau horizontal ausgerichtet und liegt in der
Pendelebene drin. Die ganze Anordnung (Pendel und Kugel) schwingt nun bei einer Auslenkung von 4˚ mit einer Frequenz von 0.5 Hz hin und her und die Kugel dreht sich rechtwinklig
zur Schwingungsebene mit einer konstanten Drehzahl von 3000 Umdrehungen pro Minute.
Mit welcher Kraft und mit welchem Drehmoment wirken die Lage auf die Kugel ein, in dem
Moment, in dem das Pendel die Gleichgewichtslage durchschwingt?
Rotationsmechanik
Seite 131
7. Der Rotator
Schwung- und Antriebsräder, Kurbelwellen, Schiffsschrauben, Propeller, CD-ROM und viele weitere Objekte aus unserer technischen Umwelt rotieren um eine starre Achse. Solch einachsig fixierte
Körper nennt man Rotatoren. Das dynamische Verhalten der Rotatoren lässt sich mit einer eigenen
Mechanik, einem Verschnitt aus Translations- und Rotationslehre, beschreiben. Viele Fragen, die nur
die Kinematik dieser frei drehbar gelagerten Körper betreffen, können mit Hilfe der Rotatormechanik schnell und zielsicher beantwortet werden. Andere Gesichtspunkte, wie die für den Maschineningenieur so wichtige Abschätzung der Lagerbelastung durch dynamische oder statische Unwucht,
treten bei dieser Formulierung der Rotationsmechanik dagegen in den Hintergrund.
Mit der Rotatormechanik lassen sich einige Phänomene schnell und effizient erklären. Diese Hybridmechanik wird denn auch oft in elementaren Lehrbüchern als Standardtheorie verwendet. Leider
produzieren solche Schnellkurse Fehlkonzepte, die sich später äusserst störend auf die Begriffsbildung auswirken können. Der Studierende gewöhnt sich an begriffliche Konstruktionen, die nur
innerhalb des engen Rahmens der Rotatormechanik gültig sind. Insbesondere lernt er, jeder Kraft ein
Drehmoment zuzuordnen, das gleich dem Produkt aus dem Betrag der Kraft und dem Abstand der
Wirklinie von der Drehachse ist. Diese kinematische Fixierung des Drehmomentes verhindert eine
echte Auseinandersetzung mit der Drehimpulsbilanz und führt nachweislich zu schwerwiegenden
Fehlleistungen. So versuchen die Studierenden oft, Kraft- und Drehmoment gegeneinander aufzurechnen, oder es werden Lösungsvorschläge angeboten, die klar die Drehimpulserhaltung verletzten.
In diesem kurzen Kapitel sollen die Grundgesetze der Translations- und der Rotationsmechanik
repetiert und ihre Bedeutung als Momentanbilanz für den Impuls und den Drehimpuls nochmals herausgestrichen werden. Dann schreiten wir zu Hybridisierung und zeigen auf, wie unter den gegebenen Umständen zwei Gesetze vereint werden können. Anhand von einigen Beispielen soll der
Unterschied zwischen den beiden Ansätzen, Translations- und Rotationsmechanik einerseits und
Rotatormechanik andererseits, nochmals aufgezeigt werden. Insbesondere bei der Energiebilanz ist
darauf zu achten, dass die verschiedenen Anteile der Bewegungsenergie richtig zusammengezählt
werden. Zum Schluss führen wir die Rotatormechanik über die Dynamik der zusammengesetzten
Körper wieder auf die allgemeine Darstellung zurück.
! Lernziele
Wissen, wie man beim Rotator der Kraft ein Drehmoment zuordnet.
Zwischen der rotatormechanischen Definition des Grundgesetzes und der analogen Beziehung
in der Rotationsmechanik unterscheiden können.
Den Satz von Steiner anwenden können.
Für den Rotator eine Energiebilanz aufstellen können.
Seite 132
Rotationsmechanik
7.1 Repetition der Grundgesetze
das Grundgesetz der Translationsmechanik
Bevor wir die Translationsmechanik zusammen mit der Drehmechanik
zur Rotatordynamik hybridisieren, sollen die beiden Gundgesetze kurz
rekapituliert werden. Zuerst einige grundlegende Bemerkungen zur
Translationsmechanik. Wirken auf einen Körper verschiedene Kräfte
ein, bestimmen sie gemäss der Formel (1.3) die Beschleunigung des
Massenmittelpunktes. Diese Beziehung, das Grundgesetz von Newton,
enthält keine Einschränkungen bezüglich der Kraftangriffsflächen. Insbesondere müssen die Wirklinien der Kräfte nicht durch den Massenmittelpunkt gehen. Betrachtet man das Grundgesetz als Spezialfall einer
Impulsbilanz, wird sofort klar, wieso nur der Betrag und die Richtung
der Kräfte, nicht aber deren Wirklinien eine Rolle spielen. Zum Aufstellen der Bilanz benötigt man nämlich nur die Stärken der einzelnen Ströme, aber nie die Lage der Oberflächenstücke, durch welche die Menge
ins System hineinfliesst. Entscheidend für die Impulsinhaltsänderungsrate sind also ausschliesslich die Stärken der drei Impulsströme, d.h. die
Summe über die drei Kraftkomponenten.
Kräfte beeinflussen die Bewegung des Massenmittelpunktes
Zur speziellen Bedeutung des Massenmittelpunktes sei hier nochmals
der Kerngedanke aufgegriffen. Die Bewegung eines starren Körpers
kann kinematisch in die Translation eines beliebigen Punktes und eine
Rotation um denselben aufgeteilt werden. Wählt man für diese Zerlegung speziell das Trägheitszentrum, den Massenmittelpunkt, werden
Impuls- und Drehimpulsbilanz geometrisch getrennt: der Körper enthält
in jedem Moment gleichviel Impuls wie ein nichtrotierender Vergleichskörper gleicher Masse und gleicher Geschwindigkeit. Deshalb lässt sich
der Impulsinhalt eines starren Körpers immer als Masse mal Mittelpunktsgeschwindigkeit schreiben. Spaltet man die Änderungsrate des
Impulsinhaltes analog in Masse mal Beschleunigung des Massenmittelpunktes auf und setzt den Ausdruck in in die Impulsbilanz ein, erhält
man wieder das Grundgesetz (1.3). Damit haben wir die grundlegende
Aussage nochmals rekapituliert, wonach eine Kraft nur die Beschleunigung des Massenmittelpunktes verursachen und durch die gegebenenfalls auftretende Rotation in ihrer Wirkung nicht beeinträchtigt wird.
das begleitende Drehmoment
Ein ausgedehnter Körper speichert neben Impuls und Energie auch noch
Drehimpuls. Alle drei Mengen sind eigenständig und dürfen nicht miteinander verrechnet werden, d.h. sie können sich unter keinen Umständen ineinander umwandeln oder sich gegenseitig vernichten. Ein starrer
Körper, der sich durch den Raum bewegt, erfüllt also in jedem Moment
sieben skalare Bilanzgesetze. Trotz des absoluten Umwandlungsverbotes sind alle sieben Grössen geometrisch voneinander abhängig. Beim
abrollenden Körper ist zum Beispiel der Impulsinhalt über die Massenverteilung und den Abrollradius mit dem Drehimpuls und der Bewegungsenergie verknüpft. Eine zweite Relation verbindet die zugehörigen
Ströme, d.h. eine Kraft kann von einem Drehmoment und einem Energiestrom begleitet sein. Das begleitende Drehmoment berechnet sich
durch das Produkt aus der Kraft und dem Abstand der Kraftwirklinie
vom Massenmittelpunkt des freigeschnittenen Körpers. Der zugeordne-
Rotationsmechanik
Seite 133
te Energiestrom oder die Leistung der Kraft ist gleich dem Skalarprodukt aus Kraft und Geschwindigkeit der Angriffsfläche.
Soll ein Körper an Ort in Rotation versetzt werden, darf netto weder Im- Kräftepaar und Dyname
puls zu- noch wegfliessen. Folglich muss der Impulsstrom, der für den
Drehimpulsaustausch mitverantwortlich ist, das System durchfliessen.
Den beiden Kräften, die den Impulsein- bzw. -austritt markieren,
schreibt man ein einziges Drehmoment zu. Greift dagegen eine “Einzelkraft, deren Wirkungslinie nicht durch den Massenmittelpunkt geht”, an
einem starren Körper an, wird sowohl Impuls- als auch Drehimpuls ausgetauscht. Diese Form der Einwirkung, die sowohl für die Änderung des
Impuls- als auch des Drehimpulsinhaltes verantwortlich ist, die also aus
Kraft und begleitendem Drehmoment besteht, nennt man Dyname.
Fliesst der Impuls über ein ausgedehntes Oberflächenstück, muss der die Wirklinie bei Kräften mit
Zusammenhang zwischen Kraft und Drehmoment weiter spezifiziert ausgedehnten Angriffsflächen
werden. Als Beispiel sei die Wirkung des Wassers auf die Seitenwand
eines Swimmingpools erwähnt. In diesem Fall ist die Grösse der Kraft
gleich dem Druck im Flächenmittelpunkt mal die Fläche der Seitenwand. Die Wirklinie, die der Seitendruckkraft zuzuordnen ist, geht jedoch - wie man sich anhand einer Zeichnung überlegen kann - nicht
durch diesen Flächenschwerpunkt. Im allgemeinen Fall muss das Drehmoment durch Addition vieler Teilbeiträge gefunden werden. Dazu ist
die Kraftangriffsläche der Symmetrie entsprechend zu zerschneiden.
Hat man dann jedem Stück die anteilsmässige Kraft zugeordnet, dürfen
die begleitenden Drehmomente einzeln berechnet und zur resultierenden Einwirkung zusammengezählt werden. Bei diesem Verfahren wird
die Wirklinie höchstens noch zur Berechnung der Teildrehmomente beigezogen.
Bewegt sich ein starrer Körper durch den Raum, sind drei Sorten Dreh- das Massenträgheitsmoment
impuls zu unterscheiden. Diese drei Drehimpulsarten transformieren ist keine Skalar
sich wie die Komponenten eines Vektors. Das Drehmoment als körperbezogene Drehimpulsstromstärke verhält sich deshalb auch wie eine
vektorielle Grösse. Der Drehmomentvektor kann gemäss Fig 6.-4 mit
Hilfe des Vektorproduktes aus der Kraft und einem Distanzvektor, der
vom Kraftangriffsort bis zum Massenmittelpunkt reicht, berechnet werden. Trotz der Strukturähnlich von Translations- und Rotationsmechanik
lässt sich die Bewegung des starren Körpers nicht mit einer einfachen
Formel analog zum Grundgesetz beschreiben. Das resultierende Drehmoment ist im allgemeinen Fall nicht proportional zur Winkelbeschleunigung. Schuld an dieser Schwierigkeit ist das etwas komlexere
Kapazitivgesetz der Drehmechanik. Wohl lässt sich der Drehimpuls linear mit der Winkelgeschwindigkeit verknüpfen, doch ist die Verknüpfungsgrösse, das Massenträgheitsmoment, mathematisch gesehen ein
Tensor und damit komplizierter gebaut als ein Skalar oder ein Vektor.
Nur im Spezialfall des um eine Hauptachse rotierenden Kreisels kann,
falls zudem noch alle Drehmomente achsial ausgerichtet sind, eine zum
Newtonschen Gesetz äquivalente Formulierung angegeben werden.
Seite 134
Rotationsmechanik
? Kontrollfragen
1.)
2.)
3.)
4.)
5.)
6.)
7.)
Wie berechnet man den Massenmittelpunkt eines Körpers?
Ein nicht festgehaltener Körper rotiere an Ort. Durch welchen Punkt verläuft die momentane
Drehachse in jedem Fall?
Ein sich drehender Körper werde mittels eine starre Achse festgehalten. Die Achse gehe nicht
durch den Massenmittelpunkt. Was wird man feststellen?
Ein Körper rotiere um eine starre Achse, die durch den Massenmittelpunkt geht. Ist der Körper
ausgewuchtet?
Eine Kraft greift mit relativ kleiner Angriffsfläche an einem starren Körper an. Welche Angaben brauchen Sie, um das begleitende Drehmoment auszurechnen? Wie berechnen Sie dieses
Moment?
Wie gross ist das Massenträgheitsmoment einer beidseits offenen Stahlhülse mit der Masse m
und mit dem Durchmesser d?
Ein Schwungrad werde mittels einer tordierten Welle in Rotation versetzt. Bei geeigneter
Wahl des positiven Drehsinns nimmt der Drehimpulsinhalt des Rades zu. Der Zustrom von
Drehimpuls ergibt bezüglich des Schwungrades ein positives Drehmoment. Ist dieses Drehmoment in Begleitung einer Kraft oder eines Kräftepaares?
7.2 Die Hybridisierung
der frei drehbar gelagerte
Köper
Zur Herleitung des Grundgesetzes der Rotatormechanik untersuchen
wir das Bewegungsverhalten eines frei drehbar gelagerten Körpers. Dieser Rotator sei weder statisch noch dynamisch ausgewuchtet sein, d.h.
die Achse muss weder durch den Massenmittelpunkt gehen, noch parallel zu einer der Hauptachsen verlaufen. Im Moment drehe sich der Rotator mit der Winkelgeschwindigkeit ω und im Punkt P wirke die Kraft F
auf ihn ein. Zudem durchstösst die Achse die Zeichenebene lotrecht.
y
FL
ω
Fig. 7. - 1: Auf einen starren
Körper, der sich als Rotator
mit der momentanen Winkelgeschwindigkeit ω um
eine starre Achse dreht,
wirke eine Kraft F ein.
Kräfte am Rotator
MMP
s
Achse
x
d
r
F
Zeigt die Summe über alle Drehmomente schief zur Achse oder ist der
Körper dynamisch nicht ausgewuchtet, wirkt von den Lagern her ein zusätzliches Moment ein, das den Vektor der Winkelgeschwindigkeit in
achsiale Richtung stabilisiert. Infolge dieser Fixierung können wir uns
auf eine ebene Beschreibung beschränken. Zudem darf das Koordinatensystem so gelegt werden, dass die Verbindungslinie Drehachse-MMP
im zu diskutierenden Moment auf die x-Achse zu liegen kommt. Mit
Rotationsmechanik
Seite 135
dieser Wahl sind die x-Komponenten der beiden Kräfte für die Normalbeschleunigung und die y-Komponenten für die Tangentialbeschleunigung verantwortlich.
Auf den rotierenden Körper wirken zwei Kräfte ein, die je von einem Drehmomente
Drehmoment begleitet sind
r
r
r
r r r r
MRe s = M1 + M2 = r × F + FL × s
(7.1)
Im Ausdruck (7.1) kann die Lagerkraft, von der wir weder die Grösse
noch die Richtung kennen, mit Hilfe des Grundgesetzes der Translation
eliminiert werden
r r r
r
r
r
r r r
r
MRe s = r × F + s × ( F − m ⋅ aMMP ) = d × F + s × m ⋅ aMMP
(7.2)
Mit der Zerlegung von aMMP in eine Normal- und eine Tangentialkomponente erhält man für das resultierende Drehmoment einen Ausdruck, der
als rein skalar Beziehung hingeschrieben werden kann:
MRe s = d ⋅ F ⋅ sin β − m ⋅ s 2 ⋅ α
y
MMP
s
x
d
β
(7.3)
F
Die Normalbeschleunigung ist aus der Formel (7.3) verschwunden, weil
kollinear zueinander stehende Komponenten keinen Beitrag zum Vektorprodukt liefern. Zudem habe ich Tangentialbeschleunigung durch das
Produkt aus der Länge s und der Winkelbeschleunigung α ersetzt.
Ersetzt man in der Drehimpulsbilanz (2.2) das resultierende Drehmo- Drehimpulsbilanz
ment durch den Ausdruck (7.3) und schreibt auf der rechten für die
Drehimpulsänderungsrate das Produkt aus Trägheitsmoment und Winkelbeschleunigung hin, nimmt die Drehimpulsbilanz die folgende Form
an
d ⋅ F ⋅ sin β − m ⋅ s 2 ⋅ α = J ⋅ α
(7.4)
Nun addieren wir den Term mit der Winkelbeschleunigung noch auf die
rechte Seite
d ⋅ F ⋅ sin β = ( J + m ⋅ s 2 ) ⋅ α
(7.5)
Die Gleichung (7.5) hat die gleiche Gestalt wie das Grundgesetz der
Drehmechanik. Einzig das Massenträgheitsmoment ist um einen Summanden ergänzt worden, der das Quadrat des Abstandes DrehachseMassenmittelpunkt enthält. Formel (7.5) kann auf beliebig viele äussere
Einwirkungen ausgedehnt werden. Dann steht auf der linken Seite die
Summe über alle “Drehmomente” und auf der rechten erscheint das Produkt aus korrigiertem Massenträgheitsmoment und Winkelgeschwindigkeit.
r
Seite 136
Rotationsmechanik
Im Grundgesetz der Rotatormechanik (7.5) ordnet man jeder äusseren
Kraft ein begleitendes “Drehmoment” zu, das gleich dem Produkt aus
der Kraft und dem Abstand der Wirklinie von der Drehachse ist. Gemäss
dieser Regel muss der Gewichtskraft immer dann ein “Drehmoment”
zugewiesen werden, wenn die Drehachse nicht durch den Schwerpunkt
geht. Auf der rechten Seite der Gleichung ist die Drehträgheit durch den
schon erwähnten Zusatzterm zu ergänzen
das Grundgesetz der Rotatormechanik
∑ Mƒ
i
= Jƒ ⋅ α
mit Jƒ = J + m ⋅ s 2
(7.6)
i
Die Korrektur des Massenträgheitsmomentes bei einem nicht ausgewuchteten Rotator gemäss (7.6) heisst in der Literatur Satz von Steiner.
Der Steinersche Satz beschreibt, wie man das Massenträgheitsmoment
ergänzen muss, damit es zusammen mit der Winkelgeschwindigkeit den
Gesamtdrehimpulsinhalt eines Körpers, der sich um eine starre Achse
dreht, korrekt wiedergibt.
der Satz von Steiner
Beispiel 30: Eine Fadenspule (Masse m, Massenträgheitsmoment J, äusserer Radius R, Wickelradius r) werde eine
schiefe Ebene (Neigungswinkel β) hinaufgezogen. Die Kraft, die an der parallel zur Ebene verlaufenden
Schnur angreift, sei gegeben. Man berechne die Winkelbeschleunigung der Fadenspule.
Lösung 30:
Zuerst lösen wir das Beispiel nach dem allgemeinen Lösungsverfahren. Wir schneiden den Körper frei,
zeichnen alle Kräfte und autonomen Drehmomente ein, führen ein Koordinatensystem ein, formulieren die
drei unabhängigen Grundgesetze und schreiben die kinematische Verknüpfung hin.
F
x
F
y
r
R
FG
β
Lageplan
FN
x:
F + FHR − FG ⋅sin β = m ⋅ aMMP
y:
FN − FG ⋅cos β = 0
R:
FHR ⋅ R − F ⋅ r = J ⋅ α
kV :
a MMP = − α ⋅ R
FHR
freigeschnittener Körper
Gleichungssystem
Die Lösung des Gleichungssytems ergibt den gesuchten Wert. Den genau gleichen Wert für die Winkelbeschleunigung erhält man, wenn die Fadenspule als Rotator behandelt wird. Bei dieser Betrachtungsweise
muss der Kraft F und der Gewichtskraft je ein Drehmoment zugeschrieben werden. Zudem ist das Massenträgheitsmoment durch den Zusatz m·R2 zu ergänzen. Dann lässt sich die Lösung mit nur einem Bewegungsgesetz direkt hinschreiben
F ⋅ ( R + r ) − FG ⋅ R ⋅ sin β = ( J + m ⋅ R2 ) ⋅ α
Das zweite Lösungsverfahren ist deutlich schneller, doch können damit nur wenige Fragen beantwortet
werden. Wenn wir zum Beispiel Grösse und Richtung der Haftreibungskraft wissen wollen, müssen wir
wieder auf das Schnittbild und auf den vollständigen Satz von Bilanzgleichungen zurückgreifen.
Rotationsmechanik
Seite 137
Die Rotatormechanik reduziert die ganze Problematik der Bewegung ei- Bemerkung zur Lagerbelanes auf einer Achse montierten Körpers auf eine zur eindimensionalen stung
Mechanik analogen Betrachtungsweise. Sie ermöglicht damit, dass die
zugehörig
e Drehbewegung bei gegebenen Einwirkungen schnell und effizient berechnet werden kann. Man sollte sich aber auch immer die Grenzen dieser Betrachtungsweise vor Augen halten. Lagerkräfte können zum
Beispiel mit Hilfe von Formel (7.6) nicht direkt berechnet werden.
? Kontrollfragen
8.)
Wie wird bei einem freien, starren Körper das Drehmoment einer Kraft berechnet? Wie
bestimmt man das Drehmoment in der Rotatormechanik?
9.)
Ist das Drehmoment einer Kraft auf die Drehachse oder auf den Massenmittelpunkt zu beziehen?
10.) Wie berechnet man die Drehträgheit eines Rotators?
7.3 Energie
Ein starrer Körper, der sich als Rotator um eine festgehaltene Achse die Energie eines starren Kördreht, speichert zusammen mit dem Impuls kinetische Energie und zu- pers
sammen mit dem Drehimpuls Rotationsenergie
Wkin =
1
2
⋅ m ⋅ vMMP
2
Wrot =
1
⋅ J ⋅ω 2
2
(7.7)
Fasst man beide Energieanteile zur Bewegungsenergie zusammen und Bewegungsenergie
ersetzt die Geschwindigkeit des Massenmittelpunktes durch das Produkt
aus Winkelgeschwindigkeit ω und Abstand s, erhält man einen Ausdruck, der wieder wie eine Rotationsenergie aussieht
WBew =
1
1
1
⋅ m ⋅ (ω ⋅ s)2 + ⋅ J ⋅ ω 2 = ⋅ Jƒ ⋅ ω 2
2
2
2
(7.8)
Die Bewegungsenergie eines Rotators und die Rotationsenergie des
Kreisels werden durch die gleiche Formel beschrieben. Der einzige Unterschied liegt beim Massenträgheitsmoment. Diese Diskrepanz wollen
wir uns einprägen: entweder berechnet man die Bewegungsenergie mit
(7.7) als Summe aus kinetischer und Rotationsenergie oder man handelt
das Problem als Rotator ab und verwendet Formel (7.8).
Beispiel 31: Ein Pendel, bestehend aus einem Stab (Länge 1.2 m, Masse 6 kg) und einer Vollkugel (Radius 7 cm, Masse
10 kg), wird um neunzig Grad ausgelenkt und dann losgelassen. Die Drehachse befindet sich 20 cm vom
einen Stabende entfernt und die Kugel ist auf die andere Stirnfläche des Stabes aufgesetzt worden. Wie
gross ist die Beschleunigung der Kugelmitte, wenn das Pendel die Gleichgewichtslage durchschwingt?
Lösung 31:
Der Gesamtmassenmittelpunkt des Pendel liegt 81.88 cm von der Drehachse entfernt. Um diese Höhe
senkt sich die Masse im Mittel ab und setzt dabei Gravitationsenergie frei. Nun ermitteln wir noch das auf
die Drehachse bezogene Massenträgheitsmoment, indem wir die beiden mit Hilfe von (7.6) berechneten
Seite 138
Rotationsmechanik
Beiträge von Stab und Kugel zusammenfassen
J=
mStab ⋅ l2
2
+ mstab ⋅ s12 + ⋅ mKugel ⋅ r 2 + mKugel ⋅ s22 = 13.149kg ⋅ m 2
12
5
Die freigesetzte Gravitationsenergie geht vollständig inRotationsenergie über. Durch Gleichsetzen der beiden Energieumsätze erhält man für die Winkelgeschwindigkeit 4.42 rad/s. In der Gleichgewichtslage steht
die Beschleunigung normal zur Bewegungsrichtung und ihr Betrag ist gleich dem Quadrat der Winkelgeschwindigkeit multipliziert mit dem Bahnradius. Für die Kugelmitte ergibt dies 20.9 m/s2.
? Kontrollfragen
Ein Zylinder (Masse m, Radius R) rolle mit der Winkelgeschwindigkeit ω auf einer horizontalen Ebene ab. Wo liegt die momentane Drehachse? Wie gross sind die kinetische und die Rotationsenergie?
12.) Ein dünner Stab mit der Masse m und der Länge l sei ein Drittel von einem Ende entfernt frei
drehbar aufgehängt. Wie gross kann seine Winkelgeschwindigkeit werden, wenn er vorher bis
in die Horizontallage ausgelenkt worden ist?
13.) Wieso ist das Formelzeichen für das Massenträgheitsmoment in (7.8) mit einer Tilde versehen
worden?
11.)
7.4 Impuls und Drehimpuls des Rotators
statische Unwucht
Jeder starre Körper, der sich mit der Winkelgeschwindigkeit ω um eine
Hauptachse dreht, speichert Drehimpuls im Betrag von Massenträgheitsmoment mal Winkelgeschwindigkeit. Wird der gleiche Körper so
festgehalten, dass die Achse nicht mehr durch den Massenmittelpunkt
geht, kommt noch ein Impulsinhalt dazu, der gleich dem Produkt aus
Masse und Geschwindigkeit des MMP ist. Bei einem asymmetrisch gelagerten Rotator ändert sich der Impulsinhalt im Rhythmus der Drehbewegung. Der dadurch erzwungene Impulsstrom, der zwischen Körper
und Erde hin- und herfliesst, führt in den Achsenlagern zu einer umlaufenden Kraft. Der Rotator gilt dann als statische nicht ausgewuchtet.
Eigen- und Bahndrehimpuls
Fasst man den nicht ausgewuchteten Rotator und die Erde zu einem Gesamtsystem zusammen, bilden die beiden Körper einen dreifachen
Drehimpulsspeicher: neben der rotierenden Erde und dem sich drehenden Körper enthalten beide Systeme gemeinsam einen Bahndrehimpuls,
der in der kollektiven Bewegung der zugehörigen Trägheitszentren gespeichert ist. Weil die Erde eine riesige Masse aufweist und gleichzeitig
die materielle Basis für die meisten Koordinatensystem darstellt, ordnen
wir den Bahndrehimpuls ganz dem Rotator zu. Der nicht ausgewuchtete
Körper mit festgehaltener Achse, der Rotator, speichert also auf zwei
Arten Drehimpuls
r
r
r r
r r
L = J ⋅ω
LBahn = s × p = m ⋅ ( s × vMMP )
(7.9)
Beim Rotator dürfen Bahn- und Eigendrehimpuls als skalare Grössen
Rotationsmechanik
Seite 139
addiert werden, weil sie zur gleichen „Sorte“gehören
Lƒ = J ⋅ ω + m ⋅ s 2 ⋅ ω = Jƒ ⋅ ω
(7.10)
In Formel (7.10) sind beide Drehimpulsspeicher zu einem einzigen Sy- Gesamtdrehimpuls
stem mit grösserem Fassungsvermögen zusammengefügt worden. Das
mit einer Tilde charakterisierte Gesamtträgheitsmoment ist identisch mit
dem entsprechenden Ausdruck in (7.6), d.h. das mit dem Satz von Steiner auf eine feste Achse bezogene Trägheitsmoment beschreibt zusammen mit der Winkelgeschwindikeit den totalen Drehimpulsinhalt des
Systems.
Ein freigeschnittener Körper enthält Impuls- und Drehimpuls. Dement- Bewegungs- und Rotationsensprechend teilt man die Bewegungsenergie in kinetische und Rotations- ergie
energie ein. Weil beim Rotator der gespeicherte Impuls den
Bahndrehimpuls festlegt und dieser zusammen mit dem Eigen- zum Gesamtdrehimpuls zusammengefasst werden darf, kann man dessen ganze
Bewegungsenergie als reine Rotationsenergie bezeichnen.
In drei Schritten haben wir nun gezeigt, dass der freie starre Körper und Kreisel und Rotator
der Rotator durch analoge Grundgesetze beschrieben werden können.
Für beide Systeme sieht die Formulierung der Rotationsenergie gleich
aus und bei beiden Körpern kann der Drehimpulsinhalt als Produkt von
Massenträgheitsmoment und Winkelgeschwindigkeit geschrieben werden. Einzig für die Berechnung des Massenträgheitsmomentes und für
die Drehmoment-Kraft-Beziehung gelten unterschiedliche Regeln. Das
begleitende Drehmoment ist beim freien Körper auf den Massenmittelpunkt zu beziehen, wogegen beim Rotator der Bezugspunkt auf der
Drehachse liegen muss. Das Trägheitsmoment ist beim Rotator eine skalare Grösse, die sich aus den auf die Achse bezogenen Beiträge allerTeilkörper zusammensetzt. Beim freien Körper wird zuerst eine Achse
ausgewählt werden. Diese hat durch den Massenmittelpunkt zu gehen
und muss in Richtung der momentanen Winkelgeschwindigkeit zeigen.
Weil sich die Richtung der Winkelgeschwindigkeit ändern kann, muss
im allgemeinen Fall das Massenträgheitsmoment andauernd neu berechnet werden.
Fällt beim Rotator die Drehachse mit keiner der drei Hauptachsen des nochmals dynamische
starren Körpers zusammen, ändert der Drehimpulsinhalt trotz konstanter Unwucht
Winkelgeschwindigkeit seine Richtung. In diesem Fall kann der Drehimpulsinhalt, wie schon früher gezeigt, mit einem geeignet gewählten
Koordinatensystem in einen tangentialen und in zwei radiale Anteil zerlegt werden. So bleibt die eine “Sorte” gespeichert und die beiden andern werden harmonisch ausgetauscht. Die durch den Austausch
erzwungenen Drehimpulsströme oder Drehmomente führen zu einer
umlaufenden Lagerbelastung, die der Fachmann als dynamische Unwucht bezeichnet.
Seite 140
Rotationsmechanik
? Kontrollfragen
14.)
Bei einem starren Körper (Masse m, Massenträgheitsmoment J), der mit konstanter Drehzahl
um eine feste Achse rotiert, laufe der Massenmittelpunkt auf einem Kreis mit Radiusr um die
Drehachse herum. Wie gross ist die resultierende Lagerkraft, die infolge der statischen
Unwucht entsteht?
15.) Wann ist ein Körper statisch, wann dynamisch ausgewuchtet?
16.) Schätzen Sie beim System Erde-Mond die Drehimpulsinhalte der beiden Himmelskörper und
den Bahndrehimpuls ab? Die genauen Zahlen können Sie einem Lexikon oder einem Atlas entnehmen.
Zusammenfassung von Kapitel 7
Die Rotatormechanik liefert eine schlanke Behandlung des fest gelagerten oder reibungsfrei rollenden Körpers. Die zugehörige theoretische Struktur lässt sich direkt aus der Translations- und der
Rotationsmechanik gewinnen. Dazu müssen die beide Betrachtungsweisen geschickt vereinigt werden. Statt der üblichen drei Gleichungen benötigt man dann nur noch eine einzige. Im Gegenzug ist
das Massenträgheitsmoment mit dem Steinerschen Satz zu korrigieren und die begleitenden Drehmomente sind auf die Drehachse und nicht wie bei der Mechanik des freien Körpers auf den Massenmittelpunkt zu beziehen.
Im Zentrum der Rotatormechanik steht ein einziges Grundgesetz, das wie eine gewöhnliche Drehimpulsbilanz aussieht. Links ist die Summe über alle Drehmomente einzusetzen, rechts kommt das Produkt aus Massenträgheitsmoment und Winkelbeschleunigung hin. Die Drehmomente der einzelnen
Kräfte sind wie üblich zu berechnen, doch muss diesmal, wie oben schon erwähnt, der Abstand von
der Drehachse genommen werden. Demnach ist das zugeordnete Drehmoment gleich dem Produkt
aus dem Betrag der Kraft und der Distanz der Wirklinie von der Drehachse. Ausserdem ist das
eigentliche Massenträgheitsmoment mit einem Zusatzterm zu ergänzen. Diese Korrektur ist unter
dem Namen Satz von Steiner bekannt.
Der sich drehende Rotator speichert Drehimpuls und Rotationsenergie. Im Körper selber ist nur ein
Teil des Drehimpulses gelagert. Der Rest steckt in der Relativbewegung von Rotator und Erde drin.
Dieser Teil darf, weil die Erde relativ zum gewählten Bezugssystem ruht, als Bahndrehimpuls direkt
dem um die Drehachse kreisenden Rotatorschwerpunkt zugeschrieben werden. Der Satz von Steiner
kann damit auch als Addition von Eigen- und Bahndrehimpuls bei einem Rotator aufgefasst werden,
wobei der Ergänzungsterm des Trägheitsmomentes multipliziert mit der Winkelgeschwindigkeit den
Bahndrehimpuls wiedergibt. Mit der Energie verhält es sich analog. Die gesamte Bewegungsenergie,
die gleich gross ist wie das Produkt aus Drehimpuls und halber Winkelgeschwindigkeit, gehört teils
zum Eigendrehimpuls teils zum Bahndrehimpuls. Man könnte den zweiten Beitrag auch als kinetische Energie bezeichnen, darf doch dieser Teil auch als Impulsinhalt mal halbe Massenmittelpunktsgeschwindigeit geschrieben werden. Aus Konsistenzgründen redet man beim starr gelagerten Körper
jedoch nur von Rotationsenergie.
Die Rotatormechanik wird in vielen Lehrbüchern als eigentliche Rotationsmechanik verkauft. Dies
funktioniert solange, wie nur die eigentliche Drehbewegung untersucht wird. Interessiert man sich
dagegen für die Lagerbelastung oder die Grösse der Haftreibungskraft bei Rollkörpern, führt der
Weg zu Lösung nur über die vollständige Dynamik mit ihren maximal sechs skalaren Bilanzgleichungen, d.h. die Bewegeung des starren Körpers ist vollständig festgelegt, sobald zu jeder Zeit
Rotationsmechanik
Seite 141
bekannt ist, wie gross die einwirkenden Kräfte und die Drehmomente sind.
?! Lernzielkontrolle
Wissen, wie man beim Rotator der Kraft ein Drehmoment zuordnet.
1.)
2.)
3.)
Um einen Zylinder (Masse m, Radius r), der aufrecht auf einem horizontalen Tische steht, ist
eine Schnur gewickelt. Nun zieht man mit der Kraft F genau horizontal an der Schnur. Wie
gross ist das auf den Zylinder einwirkende Drehmoment?
Ein dünner, zylindeförmiger Stab, der an einem Ende frei drehbar aufgehängt ist, wird um
einen festimmten Winkel ausgelenkt und dann losgelassen. Wie gross ist das Drehmoment, das
der Gewichtskraft zugeordnet werden muss? Beantworten Sie die Frage, indem Sie den Stab
als Rotator behandeln. Wie lautet die richtige Antwort, wenn der Stab als freier starrer Körper
angesehen wird?
Das Drehmoment einer Kraft ist gleich dem Vektorprodukt aus Kraft und Abstand. Welche
zwei Punkte verbindet dieser Abstandsvektor? Beantworten Sie diese Frage einmal, indem Sie
den Körper als frei ansehen und ein zweites Mal, indem Sie ihn als Rotator behandeln.
Zwischen der rotatormechanischen Definition des Grundgesetzes und der analogen Beziehung
in der Rotationsmechanik unterscheiden können.
4.)
5.)
6.)
Die Summe über alle Drehmomente ist gleich der Änderungsrate des Drehimpulses. Gilt diese
Aussage auch, falls die Drehmomente räumlich verschieden orientiert sind?
Auf ein statisch ausgewuchtetes, reibungsfrei gelagertes Schwungrad wirke eine Kraft mit
beliebiger Lage der Wirklinie ein. Das Rad ist als Rotator anzusehen. Wie berechnet man das
begleitende Drehmoment? Ist dieses Drehmoment gleich der Änderungsrate des Drehimpulses?
Auf ein statisch nicht ausgewuchtetes, reibungsfrei gelagertes Schwungrad wirke eine Kraft
mit bliebiger Wirklinie ein. Wir behandeln das Rad wieder als Rotator. Wie berechnet man nun
das begleitende Drehmoment? Ist dieses Drehmoment gleich der Änderungsrate des Drehimpulses?
Den Satz von Steiner anwenden können.
7.)
8.)
Eine Metallscheibe ist mit einer Achse versehen worden, die parallel zur Scheibenachse verläuft und diese in der Mitte zwischen einem Punkt auf dem Mantel und dem Zentrum durchstösst. Um welchen Wert ist das ursprüngliche Massenträgheitsmoment zu ergänzen, damit die
Scheibe als Rotator behandelt werden kann?
Wenn man das mit dem Satz von Steiner korrigierte Massenträgheitsmoment mit der momentanen Winkelgeschwindigkeit multipliziert, erhält man einen Drehimpuls. Wo steckt dieser
Drehimpuls? Welche Bedeutung haben die beiden Terme?
Für den Rotator eine Energiebilanz aufstellen können.
9.)
Lässt man ein ausgelenktes Pendel los, so schwingt es mehr oder weniger gedämpft hin und
her. Bei der ungebremsten Schwingung verwandelt sich während der ersten Viertelperiode die
potentielle Energie des Pendels in seine Bewegegungsenergie. Wie berechnet man die Bewegungsenergie des Pendels?
10.) Speichert ein Pendel nur Rotationsenergie, oder muss zwischen kinetischer und Rotationsenergie unterschieden werden?
11.) Beim freien Körper bezieht man das Drehmoment einer Kraft auf dessen Massenmittelpunkt
Seite 142
Rotationsmechanik
und beim Rotator auf seine Drehachse. Führt diese Wahlmöglichkeit bei der Energiebilanz
nicht zu einem Widerspruch?
A Übungsaufgaben
1.)
Ein Pendel besteht aus einem Vierkantstab (Masse 1.5 kg, Länge 80 cm) und einer Scheibe
(Masse 2.5 kg, Durchmesser 20 cm). Der Stab hängt 20 cm vom einen Ende entfernt frei drehbar an einer horizontalen Achse und die Scheibe ist so befestigt, dass das untere Ende des Stabes auf den Umfang der Kreisscheibe zu liegen kommt. Nun wird das Pendel um 30˚ ausgelenkt und dann losgelassen.
Wie gross ist die Geschwindigkeiten des oberen Stabendes, in dem Moment, in dem das Pendel durch die Gleichgewichtslage schwingt?
Mit welcher Kraft wirkt dann das Lager auf das Pendel ein?
2.)
Das Pendel aus Aufgabe 1.) wird diesmal um 45˚ ausgelenkt und dann losgelassen.
Berechnen Sie dessen Winkelbeschleunigung unmittelbar nach dem Loslassen.
Wie gross ist nun die Kraft, mit der das Lager auf das Pendel einwirkt?
3.)
Ein zylinderförmiger Metallstab (Masse 1 kg, Länge 1 m), der lotrecht auf einer horizontalen
Unterlage steht, wird ganz leicht angestossen.
Wie gross sind seine Winkelgeschwindigkeit und seine Winkelbeschleunigung in dem Moment, in dem seine Achse mit der Vertikalen einen Winkel von 30˚ einschliesst?
Mit welcher Kraft wirkt dann die Unterlage auf den Stab ein?
4.)
Ein scheibenförmiges Schwungrad (Masse 10 kg, Radius 20 cm) ist exentrisch auf einer vertikalen Antriebsachse gelagert. Die Achse durchstösst die Scheibe an einem Punkt, der 10 cm
von deren Mitte entfernt ist. Nun wird die Scheibe mit einem konstanten Drehmoment in Rotation versetzt.
Wie gross muss dieses Drehmoment sein, damit die Scheibe nach fünf Sekunden mit 1800
Umdrehungen pro Minute dreht?
Welche Leistung weist das Drehmoment zwei Sekunden nach Beginn der Einwirkung auf?
Wie sieht das Leistungs-Zeit-Verhalten des Antriebsmomentes aus?
5.)
Ein waagrecht ausgerichteter Holzbalken (Masse 10 kg, Länge 2 m), der 50 cm vom einen
Ende entfernt auf einer vertikalen Achse gelagert ist, wird von einer Bleikugel (Masse 10 g,
Geschwindigkeit 500 m/s) getroffen. Die Kugel schlägt einen Meter von der Achse entfernt genau horizontal ein und bleibt dann stecken.
Mit welcher Winkelgeschwindigkeit dreht sich der Balken nach dem Schuss?
Wieviel Energie wird während des Aufpralles dissipiert?
Wieviel Impuls fliesst von der Kugel über den Balken ans Lager ab?
Rotationsmechanik
Seite 143
8. Energetik
Die Impuls- und die Drehimpulsbilanz bilden das Fundament der Mechanik, d.h. die Kräfte bestimmen die Impulsänderungsrate (Grundgesetz der Translationsmechanik) und die Drehmomente legen
die entsprechende Grösse für den Drehimpuls fest (Grundgesetz der Rotationsmechanik). Ersetzt
man in beiden Bilanzgleichungen die Stromstärken und die Änderungsraten durch die zugehörigen
konstitutiven Gesetze, erhält man ein Differentialgleichungssystem. Die Bewegung des starren Körpers ist dann durch einen Satz von Anfangsbedingungen vollständig determiniert. Obwohl die Energie als weitere mengenartige Grösse in der Mechanik keine zusätzlichen Erkenntnisse liefert, lassen
sich bestimmte Probleme mit Hilfe der Energiebilanz schneller und eleganter lösen. Dies trifft insbesondere dann zu, wenn einem komplexen System nur ganz wenige Bewegungsmöglichkeiten offen
stehen. Die energetische Betrachtungsweise drängt sich speziell dann auf, wenn eine Maschine oder
ein Gerät ein reines input-output-Verhalten zeigt.
Leider versteht man unter der Energiebilanz meistens ein Vergleich von Energieinhalten zu verschiedenen Zeitpunkten. Zudem werden die Probleme so gewählt, dass die Arbeit der Oberflächenkräfte
verschwindet. Unter diesen einschränkenden Umständen degeneriert die Energiebilanz zu einer reinen Speicherbetrachtung. Aufgaben, die nur verlangen, dass man die Änderung der potentiellen
Energie eines Körpers in die entsprechende Differenz der Bewegungsenergie umrechnet, tragen
wenig zum Vertsändnis der Mechanik bei. Schon ein kurzer Besuch in einem Fitness-Center genügt,
um einzusehen, dass Energieumsätze viel mehr beinhalten, als nur das Studium einer auf der schiefen Ebene hinunterrollenden Kugel.
Wir werden die Energiebilanz so formulieren, dass sie auf Systeme mit beliebig vielen Freiheitsgraden angewendet werden kann. Wieder soll zwischen einer Momentanbilanz und einer Bilanz zu zwei
Zeitpunkten unterschieden werden. Aus der Energiebilanz alleine lassen sich keine gültigen Aussagen über das Verhalten eines Systems ableiten. Erst wenn die ausgetauschte Energie und die Inhaltsänderung mit weiteren Grössen verknüpft wird, liefert die Bilanz die gesuchte Beziehung zwischen
Ursache und Wirkung.
Ist die Endgeschwindigkeit eines Maschinenteils oder die Drehzahl einer Welle gefragt, muss eine
Bilanz zu zwei Zeitpunkten aufgestellt werden. Sucht man dagegen die Beschleunigung eines
bestimmten Punktes oder die Winkelbeschleunigung eines starren Körpers, führt der Lösungsweg
immer über die Momentanbilanz. Diese kann durch eine Differentiation aus der Bilanz zu zwei Zeitpunkten gewonnen werden. Der formale Apparat liefert meistens kein tiefgreifendes Verständnis.
Viel wichtiger ist das Bild, das man sich von der Energiebilanz macht. Dieses Bild soll im folgenden
Theorieteil gezeichnet werden.
Lernziele
Wissen, wie man einem Impuls- oder Drehimpulsstrom einen Energiestrom zuordnet, wie die
Leistung einer Kraft oder eines Drehmomentes zu berechnen ist.
Die Änderungsrate der Gravitations-, der kinetischen und der Rotationsenergie eines Körpers
formulieren können.
Wissen, wie man mit Hilfe des Schnittbildes eine Momentanenergiebilanz aufstellt.
Für komplexe Systeme die Energiebilanz zu zwei Zeitpunkten formulieren können.
Seite 144
Rotationsmechanik
8.1 Die Grundgesetze der Mechanik und die Energiebilanz
die Bilanzgleichungen für
ebene Bewegungen
In der Ebene besitzt der starre Körper drei Freiheitsgrade: er kann in
zwei aufeinander senkrecht stehende Richtungen verschoben oder um
eine dazu normal ausgerichtete Achse gedreht werden. Drei skalare Bilanzgesetze bestimmen deshalb sein Bewegungsverhalten. Zwei dieser
Beziehungen dürfen zu einer Vektorbeziehung zusammengefasst werden:
r
r
(8.1)
FRe s = p«
MRe s = L«
die Primärmengen Impuls und
Drehimpuls
Sie haben gelernt, dass man diese Gesetzmässigkeiten auch bildhaft interpretieren darf. Die systemdynamischen Formulierung der Physik geht
davon aus, dass sowohl der Impuls als auch der Drehimpuls als Primärgrössen existieren und nicht über irgendwelche Wirkzusammenhänge
abgeleitet werden müssen. Alle Primärmengen können in den Körpern
gespeichert oder von einem System zum andern transportiert werden.
Ein Körper tauscht demnach bei ebenen Bewegungen sowohl x- und yImpuls als auch z-Drehimpuls aus. Die Masse und das Massenträgheitsmoment übernehmen je die Funktion einer Kapazität, wobei die Geschwindigkeit oder die Winkelgeschwindigkeit des Körpers angeben,
wie stark dieser mit Impuls beziehungsweise mit Drehimpuls “gefüllt”
ist. Kräfte und Drehmomente sind körperbezogene Stromstärken, also
Bilanzgrössen bezüglich eines Systems und damit überhaupt nicht so
grundlegend wie oft behauptet wird.
Statik als Spezialfall
Beim ruhenden Körpern ändert sich weder der Drehimpuls- noch der
Impulsinhalt, d.h. in der Statik werden die rechten Seiten der Grundgesetze (8.1) gleich Null gesetzt. In dieser speziellen Situation benötigt
man zur Formulierung des Gleichgewichtes weder das Massenträgheitsmoment noch den korrekten Zusammenhang zwischen Kraft und zugeordnetem Drehmoment. Statt des Massenmittelpunktes darf ein beliebiger Bezugspunkt ausgewählt werden. Wichtig ist nur, dass alle zugeordneten Drehmomente auf die gleiche Örtlichkeit bezogen werden. Mehr
zu diesem Thema im nächsten Kapitel.
der zugeordnete Energiestrom
An einfachen Maschinen wie Hebel, Flaschenzüge und Getrieben lässt
sich zeigen, dass das Produkt aus Kraft und Geschwindigkeit der Angriffsfläche oder aus Drehmoment und zugehöriger Winkelgeschwindigkeit eine Grösse ist, die durch das Gerät hindurch erhalten bleibt. Diese
Feststellung erlaubt es, die Energie als neue Menge einzuführen. Damit
werden Geschwindigkeit und Winkelgeschwindigkeit zu eigentlichen
Potentialen, d. h. die beiden rein geometrischen Grössen verknüpfen die
transportierte Energie mit dem Impuls bzw. mit dem Drehim-puls.
Fliesst also irgendwo ein Impulsstrom leitungsartig durch das Material
hindurch, darf ihm über die Geschwindigkeit ein Energiestrom zugewiesen werden. Mit jeder Impulssorte ist ein eigener Teilenergiestrom verbunden. Die zugehörige Geschwindigkeitskomponente legt dann fest,
Rotationsmechanik
Seite 145
wieviel Energie vom jeweiligen Strom transportiert wird.
IW = vx ⋅ I px + vy ⋅ I py + vz ⋅ I pz
(8.2)
Eine zu (8.2) analoge Formel haben wir mit (6.9) im vorletzten Kapitel
für den Drehimpulsstrom hingeschrieben. Bei der Zuordnung ist darauf
zu achten, dass der Energietransport nicht doppelt gezählt wird. Falls
dem Impulsstrom über die Geschwindigkeit schon ein Energiestrom zugeordneten worden ist, darf man dem damit verbundenen Drehimpulstransport nicht noch einen weiteren Energiefluss zuweisen.
Wird ein bestimmtes System ausgewählt und freigeschnitten, verwan- die Leistung einer Kraft oder
deln sich die Impulsstromstärken in systembezogene Kräfte und aus den eines Drehmomentes
Drehimpulsströmen werden Drehmomente. Die zugeordneten Energieströme nennt man dann Leistungen der Kräfte bzw. Leistungen der
Drehmomente. Jede dieser Leistung entspricht einem Energiestrom, der
dem Vorzeichen entsprechend entweder das System verlässt oder in dieses hineinfliesst. Sind bei einem freigeschnittenen Körper alle Einwirkungen und die Geschwindigkeiten der einzelnen Angriffsflächen
bekannt, können sämtliche Leistungen berechnet werden. Wichtig ist,
dass man sich diese Energieströme möglichst konkret vorstellt. Nur eine
bildhafte Vorstellung von der transportierten und der gespeicherten Energie erlaubt ein zielsicheres Aufstellen der zugehörigen Bilanz.
Formel (8.2) ordnet jedem beliebigen Impulsstrom eindeutig einen En- die Geschwindigkeit als Enerergietransport zu. Tritt zum Beispiel ein x-Impulsstrom durch eine Kör- giebeladungsmass
peroberfläche, legt die x-Komponente der Geschwindigkeit des belasteten Oberflächenstückes fest, wieviel Energie vom geflossenen Impuls
befördert worden ist. Der mathematische Zusammenhang lässt sich
ohne Verlust an Allgemeingültigkeit in eine bildhafte Darstellung bringen. Dazu muss man sich die Bewegungsmenge als Flüssigkeit vorstellen, die geschwindigkeitsmässig hinaufgepumpt werden kann oder unter
Energieabgabe hinunterfliesst. Der Impuls, der durch einen schnell bewegten Körper hindurchgeht, gleicht im übertragenen Sinn einem hochgelegenen Fluss, der potentiell die Möglichkeit hat, hinunterzustürzen
und dabei Energie freizusetzen. Strömt der Impuls durch ein Stück Materie, das sich in negative Koordinatenrichtung bewegt, kann dieser
Transport mit einem Fluss verglichen werden, dessen Wasser gegenüber
den Weltmeeren eine negative potentielle Energie aufweist. Analoge
Bilder sind für die Elektrizitätslehre entwickelt worden. Der elektrische
Strom schleppt umso mehr Energie mit, je höher das zugehörige Potential ist. Das elektrische Potential und die Geschwindigkeit üben in den
entsprechenden Gebieten die gleiche Funktion aus, d.h. beide stellen ein
Mass für die Energiebeladung dar.
Formel (8.2) kann für die Gewichtskraft, also für den volumenmässigen potentielle Energie oder Arbeit
Impulsaustausch über das Gravitationsfeld, sinngemäss übernommen der Gewichtskraft
werden. Oft billigt man der Gewichtskraft keinen Energieaustausch zu.
Dann muss die mit dem Gravitationsfeld ausgetauschte Energie dem
Seite 146
Rotationsmechanik
Körper als potentielle zugeordnet werden. Dies ist bei der Energiebilanz
zu berücksichtigen: entweder hat der Körper potentielle Energie und die
Gewichtskraft leistet keine Arbeit oder diese Energie wird dem Gravitationsfeld zugeschrieben und die Arbeit der Gewichtskraft muss in der
Energiebilanz explizit aufgeführt werden.
der zugeordnete Energiestrom
ist vom Bezugssystem abhängig
Wechselt man von einem Inertialsystem in ein anderes, erweist sich die
Energiezuordnung in Formel (8.2) als problematisch. Einzelne Energieströme können durch den Beobachterwechsel ihre Stärke ändern, andere
verschwinden ganz. Oft entstehen sogar neue Ströme. Formel (8.2) ist,
wie der Physiker sagt, nicht galileiinvariant. Weil die Geschwindigkeit
meistens von der Erdoberfläche aus gemessen wird, bildet die Relativität des zugeordneten Energiestromes und der damit verknüpften Leistung einer Kraft praktisch nie ein echtes Problem.
der translationsmechanische
Prozess
Eine beobachterunabhängige Beschreibung des Energieumsatzes wird
erst durch die Prozessdarstellung geliefert. Als Beispiel soll uns die Reibung zwischen den Gleitflächen zweier bewegter Körper dienen. Der
Impuls, der aus dem einen Körper herausströmt, muss unmittelbar in
den zweiten hineinfliessen (Actio gleich Reactio). Bewegen sich bei diesem Austauschvorgang die beiden Objekte mit verschiedenen Geschwindigkeiten, so liegen Impulsein- und -austritt nicht auf dem gleichen Potential. Der Impuls transportiert also beim Austritt aus dem einen Körper nicht gleichviel Energie wie beim Eintritt in den andern. Die
Differenz der zugeordneten Energieströme bezeichnet man als Prozessleistung. Diese Leistung ist von der Wahl des Bezugssystems unabhängig.
Fig. 8. - 2: Die linke Skizze
zeigt die freigeschnittenen
Körper mit den horizontal
wirkenden Kraftkomponenten. Rechts sind die Leistungen dieser Kräfte angegeben. Das Vorzeichen bezieht
sich immer auf das System,
auf das die Kräfte einwirken.
Zusammenfassung
10 N
5 m/s
5 m/s
10 N
15 N
100 W
-5 m/s
-5 m/s
Fig. 8. - 1: Der Impulsstrom,
der von rechts her in den
oberen Klotz hineinfliesst,
setzt zwischen den beiden
Körpern eine Leistung von
100 W frei. Ein zweiter
Strom, der von der Unterlage
in den unteren Klotz eindringt, gibt bei einer Stärke
von 5 N und einer Fallhöhe
von 5 m/s eine Leistung von
25 W ab.
5N
25 W
x
5 m/s
10 N
50 W
10 N
- 50 W
- 50 W
10 N
15 N
5 m/s
75 W
5N
-25 W
Jedem Impuls- und jedem Drehimpulsstrom kann ein Energiestrom zugeordnet werden. Die Summe über alle Energieströme eines Systems er-
Rotationsmechanik
Seite 147
gibt die Änderungsrate des Energieinhaltes. Fällt der Impuls oder der
Drehimpuls von einem beliebigen Potential (Geschwindigkeit oder
Winkelgeschwindigkeit) auf ein anderes, wie das in einer Grenzschicht
zwischen zwei Maschinenteilen häufig der Fall ist, gibt der Impuls- bzw.
der Drehimpulsstrom einen Teil des zugeordneten Energiestromes frei.
Soche Vorgänge bezeichnen wir als Prozesse und den zugehörigen Energieumsatz als Prozessleistung. Falls der Impuls oder der Drehimpuls direkt ans Bezugssystem abfliesst, ist der zugeordnete Energiestrom
gleich gross wie die Prozessleistung.
? Kontrollfragen
1.)
2.)
3.)
4.)
5.)
6.)
7.)
8.)
9.)
Was verstehen wir unter dem zugeordneten Energiestrom? Wem wird die Energie zugeordent?
Wie berechnet sich die Stärke dieses Stromes?
Wann fliesst der zugeordnete Energiestrom gegen den Impulsstrom?
Wie lautet die Formel zur Berechnung der Leistung einer Kraft?
Die Leistung einer Kraft sei negativ. Welche Aussage ist mit diesem Minuszeichen verbunden?
Wie ändert sich die Gravitationsenergie eines Körpers im homogenen Feld?
Auf ein reibungsfrei gelagertes, ruhendes Schwungrad wirke ein konstantes Drehmoment ein.
Dadurch erfährt es eine konstante Winkelbeschleunigung. Wie stark ist der begleitende Energiestrom, die Leistung des Drehmomentes, zu einem beliebigen Zeitpunkt? Wie ändert sich der
Energiestrom mit der Zeit?
Ein Körper werde im Vakuum mit v0 hochgeworfen. Wie gross ist die Leistung der Gewichtskraft beim Abwurf, am höchsten Punkt und vor dem Aufschlag auf gleicher Höhe?
Müssen die beiden Partner eines Actio-Reactio-Paares immer die gleiche Leistung aufweisen?
Wann ist der zugeordneter Energiestrom gleich gross wie die Prozessleistung ?
8.2 Die Energiebilanz bei komplexen Systemen
Die Impuls- und die Drehimpulsbilanz legen die Bewegung eines star- die Energiebilanz liefert keine
ren Körpers vollständig fest. Sind also alle einwirkenden Kräfte und zusätzlichen Informationen
Drehmomente sowie die Systemeigenschaften Masse und Massenträgheitsmoment bekannt, können aus einem gegebenen Anfangszustand
alle folgenden berechnet werden. Auch die Energiebilanz hat sich diesem Diktat zu beugen. Mit ihrer Hilfe können keine zusätzlichen
Schlüsse gezogen werden. Jede Folgerung aus der Energiebilanz lässt
sich im Prinzip aus den beiden andern Bilanzgleichungen ableiten. Die
mechanische Energiebilanz ist aus den beiden Grundgesetzen der Mechanik ableitbar. Dies soll an einem einfachen Beispiel gezeigt werden.
Tauscht ein starrer Körper nur an wenigen Stellen mit der Umgebung die Energiebilanz beim starren
Impuls aus, wirken also nur Einzelkräfte mit beinahe punktförmiger An- Körper
griffsflächen auf einen Körper ein, weist jede Kraft eine Leistung auf,
die gleich dem skalaren Produkt aus Kraft und Geschwindigkeit ist. Nun
schreiben wir die Energiebilanz formal hin und ersetzen dann die systembezogenen Energieströme durch das Skalarprodukt aus Kraft und
Geschwindigkeit. Durch weitere Umformungen gewinnt man zwei Terme, die den Änderungsraten der kinetischen und der Rotationsenergie
Seite 148
Rotationsmechanik
entsprechen.
∑I
i
Wi
r r
r r r
r r
= ∑ Fi ⋅ vi = ∑ Fi ⋅ (ω × ri ) + ∑ Fi ⋅ vMMP
i
i
r r
r r r
= ∑ (ri × Fi ) ⋅ ω + ∑ Fi ⋅ vMMP
i
i
(8.3)
i
r
r r
r
= Mres ⋅ ω + FRe s ⋅ vMMP = W«rot + W«kin
die Energiebilanz verursacht
wenig Aufwand
Im Normalfall fliesst bei einem Körper Impuls über verschiedene Oberflächenstücke und häufig wirken an ausgewählten Stellen noch reine
Drehmomente ein. Einzelne Maschinenteile können sogar von einem
ganzen Bündel von Impuls- und Drehimpulsströmen durchflossen werden. Weil technische Systeme trotz der Unzahl von Wechselwirkungen
meist nur eine einzige Bewegung zulassen, lohnt es sich selten, alle Einwirkungen im Detail zu studieren. In solchen Fällen führt die Energiebilanz viel schneller zum gesuchten Resultat. Das aus dieser Einsicht
heraus entstandene Energiestrombild ist eine eigenständiges Hilfsmittel,
das immer dann anzuwenden ist, wenn ein mechanisches System nur
ganz wenige Freiheitsgrade besitzt.
das Energiestrombild
Das Energiestrombild baut auf dem altbekannten Schnittbild auf, d.h.
zuerst sind alle Kräfte und Momente, die auf ein System einwirken,
nach Betrag und Richtung zu bestimmen. Danach berechnet man die
Leistungen dieser Einwirkungen, interpretiert sie als Energieströme und
summiert über all diese Ströme auf. Diese Summe liefert beim starren
Körper direkt die Änderungsrate der Bewegungsenergie. Bei defomierbaren Objekten muss noch die Änderung der Innere Energie berücksichtigt werden. Weil die Bewegungsenergie selber nur noch mit den beiden
Systemeigenschaften Masse und Massenträgheitsmoment sowie mit der
Geschwindigkeit des MMP und der Winkelgeschwindigkeit zusammenhängt, lassen sich aus der Energiebilanz klare Aussagen über Bewegungsverhalten des starren Körpers ableiten. Die Herstellung des
Energiestrombildes ist operationalisierbar, d.h. man kann dieses Bild
nach einem einfachen Rezept herstellen:
1. Systeme definieren und abgrenzen.
2. Alle Energiespeicher (Bewegungs-, Gravitations- und innere Energie) explizit aufzählen.
3. Kräfte und Drehmomente einzeichnen und ihre Leistung berechnen.
4. Jede Leistung als mechanische Energiestromstärke bezüglich des Systems auffassen
und das Vorzeichen als Zu- oder Abfluss interpretieren.
5. Die Energiebilanz formal aufstellen: die Summe über alle Energieströme (Leistungen
der Kräfte und Drehmomente) ist gleich der Summe über die Änderungsraten alle
Speicher.
6. Die Energieänderungsrate durch Trägheit und geometrische Grössen ersetzen.
die Änderungsrate der Bewegungsenergie
Den letzten Punkt des Rezeptes haben wir noch nicht eingehend genug
Rotationsmechanik
Seite 149
besprochen. Dies soll hier nachgeholt werden. Die geometrische Darstellung der Änderungsrate der kinetischen Energie ergibt sich aus Formel (8.3). Zuerst ersetzt man die resultierende Kraft durch die
Impulsänderungsrate und das totale Drehmoment durch die entsprechende Rate für den Drehimpuls. Die Impulsänderungsrate darf nun als
Produkt aus Masse und Beschleunigung geschrieben werden. Falls der
Körper eine feste Achse besitzt, kann man mit dem zweiten Term analog
verfahren. Dabei ist darauf zu achten, dass das Massenträgheitsmoment
auch wirklich bezüglich der in Frage kommenden Drehachse berechnet
worden ist.
WBew = W«rot + W«kin = J ⋅ ω ⋅ ω« + m ⋅ vMMP ⋅ v«MMP
(8.4)
Gemäss der Herleitung müsste die Änderungsrate der kinetischen Energie durch Masse mal Skalarprodukt aus Geschwindigkeit und Beschleunigung ersetzt werden. Weil bei den nachfolgenden Beispielen Beschleunigung und Geschwindigkeit meistens kollinear sind, habe ich auf
die vektorielle Schreibweise verzichtet. Falls die Beschleunigung doch
einmal schief zur momentanen Geschwindigkeit steht, trägt nur deren
Tangentialkomponente zur Änderung der kinetischen Energie bei.
Schreibt man der Gewichtskraft keine Leistung zu, muss auf der rechten Die Energiebilanz im GravitaSeite von (8.3) noch die Änderungsrate der Gravitationsenergie beige- tionsfeld
fügt werden. Diese Rate ist gleich dem Produkt aus Masse, Gravitationsfeldstärke und Geschwindigkeit des Schwerpunktes. Reine Drehmomente, wie sie etwa in Achslagern oder Antriebswellen auftreten,
müssen selbstverständlich auch noch in die Bilanzbeziehung aufgenommen werden. Damit sieht die momentane Energiebilanz für ein Maschinenteil wie folgt aus
r r
(8.5)
∑ Fi ⋅ vi + ∑ Mi ⋅ ω = m ⋅ vMMP ⋅ v«MMP + J ⋅ ω ⋅ ω« + m ⋅ g ⋅ vMMP
i
i
Eine Maschine besteht oft aus vielen starren Körpern, die alle so mitein- Die Energiebilanz bei Maschiander verbunden sind, dass nur eine einzige Bewegungsmöglichkeit frei nen
bleibt. In diesem Fall lässt sich die ganze Energiebilanz auf eine Zeile
bringen, bei der auf der linken Seite die Leistungen aller äusseren Einwirkungen und rechts die Änderungsraten aller möglichen Speicher aufgelistet werden. Weil die geometrischen Grössen Drehzahl, Geschwindigkeit und Beschleunigung voneinander abhängig sind, können diese in
der Regel bis auf die gesuchte eliminiert werden.
Formel (8.5) lässt sich wie jede Momentanbilanz durch eine Integration Die aufintegrierte Energiebiin eine Bilanz über eine ganze Zeitspanne umformen. Man erhält dann lanz
analog zur Formel (3.5) eine Gleichung, auf der links die Arbeit der
Kräfte und Drehmomente und rechts die Änderung aller Speicher aufgelistet sind. Statt eine Formel hinzuschreiben, skizziere ich hier nochmals
die allgemeine Strategie: zuerst zählt man verbal alle Speicher auf, dann
berechent man die Arbeit der äusseren Einwirkungen und setz schlussendlich die resultierende Arbeit mit der Summe über alle Inhaltsände-
Seite 150
Rotationsmechanik
rungen gleich. In der Regel lassen sich dann unbestimmte geometrische
Grössen wie Verschiebungen, Drehungen und Geschwindigkeiten über
sogenannte kinematische Verknüpfungen eliminieren.
Beispiel 32: An den beiden Enden eines Seiles, das über eine Umlenkrolle
(Massenträgheitsmoment 1.6 kg·m2, Durchmesser 80 cm) gelegt
worden ist, hängt je ein Körper (Massen 10 kg und 5 kg). Die Reibung im Lager wirkt mit einem Drehmoment von 2 Nm auf die
Umlenkrolle ein.
Wie gross ist die Endgeschwindigkeit des grösseren Klotzes nach
Fallstrecke von einem Meter.
Wie gross ist seine Beschleunigung?
Ø 0.8 m
1.6 kg.m2
2 Nm
10 kg
Lösung 32:
5 kg
Bevor man die einzelnen Beziehungen formelmässig hinschreibt,
sollten alle Lieferanten, Speicher und Verbraucher aufgelistet werden.
Das Gravitationsfeld tritt einerseits als Lieferant (schwerer Klotz), andererseits als Verbraucher (leichter
Klotz) auf. Beide Körper sowie die Umlenkrolle speichern Energie, indem sie sich bewegen. Die Reibung
entzieht dem mechanischen System proportional zur Drehzahl Energie.
Nun brauchen wir nur noch ein Energiebilanz zu zwei Zeitpunkten hinzuschreiben. Dabei fügen wir die
Lieferanten mit positivem und die Verbraucher mit negativem Vorzeichen in die Linke Seite der Bilanz ein.
Auf der rechten Seite führen wir die verschiedenen Speicher auf.
W ( FG1 ) + W ( FG 2 ) + W ( M ) = ∆Wkin1 + ∆Wkin 2 + ∆Wrot
m1 ⋅ g ⋅ s − m2 ⋅ g ⋅ s − M ⋅ ϕ =
1
1
1
m1 ⋅ v 2 + m2 ⋅ v 2 + J ⋅ ω 2
2
2
2
Statt der Arbeit der Gewichtskräfte hätte man auch die Änderung der Gravitationsenergie mit umgekehrtem Vorzeichen auf der rechten, der Speicherseite aufführen können. Formal würde dies an der Energiebilanz nichts ändern.
Sobald der Winkel durch die Verschiebung und die Winkelgeschwindigkeit durch die Geschwindigkeit
ersetzt worden ist, kann die Gleichung nach der Unbekannten aufgelöst werden.
s 1
1
v
( m1 − m2 ) ⋅ g ⋅ s − M ⋅ = ( m1 + m2 ) ⋅ v 2 + ⋅ J ⋅
R
R 2
2
v=
2
2 ⋅ ( ∆m − M R ) ⋅ s
= 1.88 m/s
m1 + m2 + J R2
Zur Beantwortung der zweiten Frage gehen wir genau gleich vor, nur schreiben wir links die Leistungen
der Einwirkungen und rechts die Änderungsraten der Speicher hin.
P( FG1 ) + P( FG 2 ) + P( M ) = W«kin1 + W«kin 2 + W«rot
m1 ⋅ g ⋅ v − m2 ⋅ g ⋅ v − M ⋅ ω = m1 ⋅ v ⋅ v« + m2 ⋅ v ⋅ v« + J ⋅ ω ⋅ ω«
Indem man sich in der Momentanenergiebilanz die Leistungen bildlich als Energiströme vorstellt und alle
Speicher als Kübel auffasst, lässt sich die ganze Gleichung nochmals überprüfen. Sind wirklich alle Speicher aufgeführt und ist kein Energiestrom vergessen gegangen?
Nun gilt es, die Winkelgrössen über die kinematischen Verknüpfungen durch die entsprechenden Translationsgrössen zu ersetzen. Weil in jedem Term die Geschwindigkeit einmal auftaucht, lässt sie sich ausge-
Rotationsmechanik
Seite 151
klammern und wegkürzen. Den Rest löst man nach der Beschleunigung auf.
( m1 − m2 ) ⋅ g ⋅ v − M ⋅
v« =
v
J
= m1 ⋅ v ⋅ v« + m2 ⋅ v ⋅ v« + 2 ⋅ v ⋅ v«
R
R
∆m ⋅ g − M R
= 1.76 m/s2
2
m1 + m2 + J R
Bei dieser Aufgabe hätte man die Beschleunigung auch über eine einfache kinematische Beziehung aus der
Endgeschwindigkeit und dem Verschiebeweg berechnen können. Dies ist jedoch nur bei einer konstanten
Beschleunigung möglich. Im allgemeinen Fall liefert nur die Momentanenergiebilanz den korrekten
Beschleunigungswert.
Jeder Term der Momentanenergiebilanz enthält entweder eine Ge- Energiebilanz und Grundgeschwindigkeit oder eine Drehzahl. Über kinematische Verknüpfungen setz
lassen sich all diese Bewegungsgrössen in eine einzige umformen und
durch Division aus der Gleichung entfernen. Der Rest sieht dann aus
wie ein Grundgesetz der Mechanik (Summe über alle Kräfte gleich
Masse mal Beschleunigung). Die Momentanenergiebilanz liefert also
eine Beziehung, welche die Form einer gewöhnlichen Impulsbilanz annimmt. Die formale Ähnlichkeit darf aber nicht falsch interpretiert werden, denn in der Regel verknüpft die Energiebilanz mehrere Sorten
Impuls mit einer Sorte Drehimpuls. Damit die rotationsmechanischen
Grössen einheitenmässig zu den translationsmechanischen passen, ist
jedes Drehmoment durch den zugehörigen Radius und jedes Massenträgheitsmomente durch das Quadrat des Wickelradius zu teilen. Löst
man die Energiebilanz nach einer Winkelgrösse auf, sind alle Kräfte und
Massen geometrisch zu korrigieren.
Beispiel 33: Zwei auf je einer Achse gelagerte Walzen (Radius 40 cm und 20
cm) werden längs einer Mantellinie so stark zusammengedrückt,
dass sie einander ohne Schlupf anzutreiben vermögen. An den beiden Walzen ist je eine Wickelspule (Radius 20 cm und 30 cm) mit
angehängtem Klotz (20 kg und 2 kg) montiert. Die grössere Walze
weist zusammen mit der Spule ein Massenträgheistmoment von 4
kg·m2 auf. Die Drehträgheit des andern Systems beträgt 1.5 kg·m2.
Die Achsen wirken mit einem konstanten Reibdrehmoment von je 2
Nm auf beide Walzen ein,
Wie gross wird die Beschleunigung des schwereren Körpers, wenn
man das System sich selbst überlässt?
Lösung 33:
4 kg·m2
20 kg
1.5 kg·m2
2 kg
Wieder gilt es, ein vollständige Momentanenergiebilanz aufzustellen.
P( FG1 ) + P( FG 2 ) + P( M1 ) + P( M2 ) = W«kin1 + W«kin 2 + W«rot1 + W«rot 2
m1 ⋅ g ⋅ v1 − m2 ⋅ g ⋅ v2 − M1 ⋅ ω1 − M1 ⋅ ω1 = m1 ⋅ v ⋅ v« + m2 ⋅ v ⋅ v« + J1 ⋅ ω1 ⋅ ω«1 + J2 ⋅ ω 2 ⋅ ω«2
Alle Bewegungsgrössen müssen nun auf die Geschwindigkeit und die Beschleunigung des grösseren Klotzes umgerechnet werden. Dazu benötigen wir drei kinematische Beziehungen.
ω1 ⋅ r1 = ω 2 ⋅ r2 ; v1 = ω1 ⋅ w1 ; v 2 = ω 2 ⋅ w2
Die Walzenradien kennzeichne ich mit r und die Wickelradien mit w. Ersetzt man nun alle unerwünschten
Bewegungsgrössen durch die entsprechenden Werte für den grossen Klotz, klammert die verbleibende
Geschwindigkeit aus allen Termen aus, kürzt sie weg und löst dann die Gleichung nach der gesuchten Be-
Seite 152
Rotationsmechanik
schleunigung auf, erhält man
( m1 − m2 ⋅
v«1 =
r1 ⋅ w2
M M ⋅r
)⋅g − 1 − 2 1
r2 ⋅ w1
w1 w1 ⋅ r2
2
r ⋅w
J
J ⋅r
m1 + m2 1 2 + 12 + 22
w1 w1 ⋅ r
r2 ⋅ w1
2
1
2
2
= 0.142 m / s 2
Im Zähler des Hauptbruches stehen die mechanischen Einwirkungen und im Nenner sind alle auf die
Bewegung des grossen Klotzes umgerecheneten Trägheiten aufgeführt.
? Kontrollfragen
10.)
11.)
12.)
13.)
14.)
Eine Metallkugel, die am unteren Ende einer Feder befestigt ist, schwingt auf und ab. Schneiden Sie die Kugel frei und bestimmen Sie formal alle Energieströme bezüglich der Kugel, in
dem Moment, in dem sie von oben her die Gleichgewichtslage durchfliegt. Skizzieren Sie das
Energiestromdiagramm.
Schneiden Sie die als masselos angenommene Feder frei und bestimmen Sie für den gleichen
Zeitpunkt die zugeordneten Energieströme. Skizzieren Sie wieder ein Energiestromdiagramm.
Schneiden Sie das Antriebsrad eines anfahrenden Autos frei und bestimmen Sie formal die
Energieströme. Skizzieren Sie ein Energiestromdiagramm.
Zeichnen Sie ein kleines Getriebe, bei dem drei Zahnräder ineinander greifen. Dann wählen
Sie am Eingang ein Drehmoment, führen an jeder Achse ein Reibmoment ein und berechnen
das Drehmoment am Ausgang. Wie sieht das zugehörige Energiestromdiagramm aus? Können
Sie angeben, wie der Drehimpuls durch das Getriebe strömt?
Wie erhält man aus der Momentanenergiebilanz, die für eine beliebige Maschine aufgestellt
worden ist, die Beschleunigung eines Bauteiles. Skizzieren Sie mit wenigen Stichworten den
Lösungsweg.
8.3 Ein ausführliches Beispiel
Geräte mit nur einem Freiheitsgrad
Weist ein technisches System viele Bauteile auf, die starr miteinander
verzahnt sind, und sucht man nur eine Aussage über die Antriebskraft
oder über das Eingangsdrehmoment, führt der Weg über die Energiebilanz am schnellsten zum Ziel. Statt die einzelnen Elemente freizuschneiden, behandelt man dann ganzen Apparat als ein Objekt mit nur einem
Freiheitsgrad. Obwohl wir im letzten Abschnitt schon zwei Beispiele
diskutiert haben, soll hier die gleiche Idee nochmals abgehandelt werden. Doch diesmal soll die Fragestellung so komplex sein, dass nur ein
systematisches Vorgehen Erfolg garantiert.
.die Aufgabenstellung
Eine Skiliftanlage habe eine Länge von 500 Meter und eine mittlere
Hangneigung von 20%. Das Drahtseil wiege drei Kilogramm pro Meter
und werde von 100 Führungsrollen (Durchmesser 25 cm, Masse 12 kg)
gehalten. An beiden Enden der Anlage sei das Seil über eine grosse
Scheibe geführt (Masse 320 kg, Radius 75 cm, Massenträgheitsmoment
150 kg·m2). Der Lift sei voll besetz, d.h. 40 Personen à 75 kg hängen in
den Bügeln. Wie gross muss das Drehmoment auf die Antriebsscheibe
sein, wenn der Lift ein Beschleunigung von 2 m/s2 erhalten soll. Die La-
Rotationsmechanik
Seite 153
gerreibung betrage in den Führungsrollen 0.02 Nm und in den beiden
Scheiben je 10 Nm. Für den Gleitreibungskoeffizienten der Grenzfläche
Ski-Schnee darf 0.12 gesetzt werden. Die Bügelseile schliessen mit der
Piste einen Winkel von 15˚ ein.
Bevor wir uns der Analyse des Gesamtsystems zuwenden, soll die Glei- Zuerst die Kräfte
treibungskraft zwischen den Skis und der Unterlage bestimmt werden.
Dazu schneiden wir einen Skifahrer frei, führen ein Koordinatensystem
y
ein, stellen das Grundgesetz für beide Koordinatenrichtungen auf und
lösen bei der gegebenen Beschleunigung zuerst nach der Seilkraft auf.
Die vertikale Komponente der Seilkraft vermindert die Normalkraft und
damit auch die gesuchte Gleitreibungskraft.
x:
FS ⋅ cos β − FG ⋅ sin α − FR = m ⋅ a
FR = µ ⋅ FN
y:
FN + FS ⋅ sin β − FG ⋅ cos α = 0
FN = FG ⋅ cos α − FS ⋅ sin β
FS =
x
FS
FG ⋅ sin α + µ ⋅ FG ⋅ cos α + m ⋅ a
= 382 N
cos β + µ ⋅ sin β
FG
FR = µ ⋅ ( FG ⋅ cos α − FS ⋅ sin β ) = 74.7 N
FN
FR
Nun, da wir wissen, wie gross die Wechselwirkung zwischen den Skis
und der Unterlage ist, können wir die Energiebilanz formulieren. Diese
Bilanz unterscheidet sich von (8.5) durch eine viel grössere Zahl von
Speichern. Schreiben wir also die Energiebilanz einmal so formal wie
möglich hin und setzen dann nachträglich links und rechts alle notwendigen Terme ein.
∑I
i
W , mechi
= ∑ W«j
(8.6)
j
Auf der linken Seite von (8.6) werden alle mechanischen Energieströme Energieströme
aufsummiert. Diese Ströme nennt man üblicherweise Leistung eines
Drehmomentes oder Leistung einer Oberflächenkraft. Die Leistung der
Gewichtskraft zählen wir diesmal nicht zu den Energieströmen. Dafür
muss auf der rechten, der Speicherseite der Energiebilanz die Änderungsrate der potentiellen Energie aufgelistet werden. Zufliessende Ströme werden positiv, abfliessenden negativ gezählt. Die Vorzeichenregel
ist automatisch erfüllt, wenn wir die Leistung einer Kraft über das Skalarprodukt berechnen. Bei der Leistung der Drehmomente sieht die Sache ähnlich aus. Sie wird positiv und enspricht damit einer Energiezufuhr, sobald Drehmoment und zugehörige Winkelgeschwindigkeit
gleichgerichtet sind. In unserem Beispiel fliesst nur über die Antriebsachse Energie zu. In sämtliche Reibflächen wird Energie dissipiert, also
Entropie produziert. Die Dissipationsrate entspricht entweder der Leistung einer Reibkraft oder der Leistung eines Reibdrehmomentes.
∑I
W , mechi
= M ⋅ ω Sch − 2 ⋅ M R, Sch ⋅ ω Sch − 100 ⋅ M R, Ro ⋅ ω Ro − 40 ⋅ FR ⋅ v
i
Auf der rechten Seite von (8.6) setzen wir die Änderungsraten aller En- Energieänderungsraten
Seite 154
Rotationsmechanik
ergiespeicher ein. Dazu gehören die Rotationsenergie der beiden grossen Scheibenräder und der hundert Rollen. Die kinetische Energie des
Seils und der vierzig Skifahrer bilden weitere Speicher. Weil wir der Gewichtkraft keine Leistung zugeschrieben haben, muss auch noch Gravitationsenergie aller Skifahrer berücksichtigt werden.
∑ W«
j
= 100 ⋅ J Ro ⋅ ω Ro ⋅ ω«Ro + 2 ⋅ JSch ⋅ ω Sch ⋅ ω«Sch
j
+ ( 40 ⋅ mSf + mSeil ) ⋅ v ⋅ v« + 40 ⋅ mSf ⋅ g ⋅ h«
kinematische Verknüpfungen
Gesucht ist das auf die Antriebsachse einwirkende Drehmoment. Deshalb ist die Winkelgeschwindigkeit der Führungsrollen und die Seilgeschwindigkeit auf die Winkelgeschwindigkeit der antreibenden Scheibe
umzurechnen.
ω Ro = ω Sch ⋅
rSch
rRo
v = ω Sch ⋅ rSch
Die Führungsrollen dürfen als Zylinder gerechnet werden. Die Hubgeschwindigkeit hängt über die mittlere Steigung der Piste mit der Seilgeschwindigkeit zusammen.
J Ro
die dynamische Grundgleichung
mRo ⋅ rRo2
=
2
h = v ⋅ sin α
Setzt man sowohl die Energieströme als auch die Änderungsraten aller
Energiespeicher in die Bilanz (8.6) ein und bezieht alle kinematischen
Grössen mit Hilfe oben angegebenen Umrechnungsformeln auf die
Treiberscheibe, erhält man die folgende Beziehung
rSch
− 40 ⋅ FR ⋅ rSch ⋅ ω Sch
M − 2 ⋅ M R, Sch − 100 ⋅ M R, Ro ⋅
rRo
(
)
2
2
} ⋅ ω«Sch + 40 ⋅ mSf ⋅ g ⋅ rSch ⋅ sin α ⋅ ω Sch
= {50 ⋅ mRo ⋅ rSch
+ 2 ⋅ JSch + ( 40 ⋅ mSf + mSeil ) ⋅ rSch
das treibende Drehmoment
Die verbleibende Bewegungsgrösse, die Winkelgeschwindigkeit der
Scheibe, kann wieder weggestrichen werden. Der Rest weist die gleiche
Struktur auf wie das Grundgesetz der Drehmechanik. Links stehen die
auf die Scheibe bezogenen “Drehmomente” und rechts in der geschweiften Klammer ist das “Gesamtmassenträgheitsmoment” aufgeführt. Die Winkelbeschleunigung hängt über den Scheibenradius mit der
Beschleunigung des Drahtseiles zudammen und beträgt 1.5 s-1. Wird
nun die Gleichung noch nach dem gesuchten Drehmoment aufgelöst, erhält man 12’614.6 Nm. Mit diesem Drehmoment muss der Motor auf
die Treiberscheibe einwirken, damit der Lift eine Beschleunigung von 2
m/s2 erhält.
das Pendel als Energiewandler
Die Momentanenergiebilanz liefert oft eine Gleichung, die wie das
Grundgesetz der Mechanik aussieht. Deshalb besteht die Gefahr, dass
zwei unterschiedliche Betrachtungsweisen vermengt werden. Dies geschieht wohl am häufigsten bei der Diskussion des mathematischen Pen-
Rotationsmechanik
Seite 155
dels. Das mathematische Pendel ist ein Modell, bei dem ein wirkliches,
physisch genanntes Pendel auf einen Massenpunkt und eine als masselos gedachte Schnur abgebildet wird. Ein mathematisches Pendel kann
näherungsweise durch eine Bleikugel, die an einem dünnen Faden
hängt, realisiert werden. Auf die Bleikugel wirken nur die Gewichtsund die Fadenkraft ein. Da im reibungsfreien Fall die Fadenkraft immer
normal zur Geschwindigkeit steht, ist die Leistung dieser Kraft während
der ganzen Bewegung immer gleich Null, d.h. die Kugel tauscht nur mit
dem Gravitationsfeld Energie aus. Damit “wandeln“ bei der Schwingung des reibungsfrei gelagerten Pendels nur potentielle und kinetische
Energie ineinander um.
FS
v
FG
Die Momentanenergiebilanz eines Pendels sieht denkbar einfach aus: die Energiebilanz beim Pendel
die Änderungsraten der kinetischen und der potentiellen Energie heben
sich auf. Man könnte auch argumentieren, dass die Leistung der Gewichtskraft die Änderungsrate der kinetischen Energie hervorruft.
P( FG ) = W«kin
m ⋅ g ⋅ v ⋅ sin ϕ = m ⋅ v ⋅ v«
⇒ g ⋅ sin ϕ = ϕ««⋅ l
Die Energiebilanz legt nur die Tangentialkomponente der Beschleuni- die Beschleunigung des Fadengung fest. Es wäre deshalb falsch, wenn man in der Energiegleichung pendels
die Geschwindigkeit wegkürzen und den Rest als Impulsbilanz lesen
an = v2/l
würde. Auch beim idealisierten Pendel ist die eigentliche Impulsbilanz
eine delikate Angelegenheit. Insbesondere steht der Beschleunigungsvektor beliebig zur Geschwindigkeit. Nur an drei Punkten kann dieser
Vektors ohne grosse Rechnung bestimmt werden. Bei den beiden Umkehr- oder Totpunkten ist die Beschleunigung tangential zur Bahn geat = g·sinϕ
richtet und ihr Betrag enspricht dem Wert, der aus der Energiebilanz
folgt. Am tiefsten Punkt zeigt der Beschleunigungsvektor normal zur
Bahn und sein Betrag ist gleich dem Quadrat der Geschwindigkeit dividiert durch den Bahnradius. Zu allen andern Zeitpunkten setzt sich die
Beschleunigung und damit die Impulsänderungsrate aus einem Normalund einem Tangentialanteil zusammen.
? Kontrollfragen
15.)
Wieso ist die Reibkraft beim Skifahrer nicht gleich dem Produkt aus Reibungskoeffizient und
Normalkomponente der Gewichtskraft?
16.) In der letzten Gleichung des Skiliftproblems sind die Reibdrehmomente der Führungsrollen
mit einem Faktor multipliziert worden, der grösser als eins ist. Damit wirkt diese Reibung stärker auf die Antriebsachse ein, als wenn sie direkt dort ansetzen würde. Wie kann man das
erklären?
17.) Die Masse des Seils und der Skifahrer wird auf den Antrieb umgerechnet, indem man diese
Grössen mit dem Quadrat des Scheibenradius multipliziert. Wie ist dieser Faktor zu erklären?
18.) Wie berechnet man die Beschleunigung des Pendelkörpers zu einem beliebigen Zeitpunkt?
Seite 156
Rotationsmechanik
Zusammenfassung von Kapitel 8
Maschinen und andere mechanische Geräte funktionieren oft als einfache Input-Qutput-Systeme.
Üblicherweise wird bei diesen Apparaten eine Drehbewegung am Eingang in eine Rotation oder in
eine Pendelbewegung am Ausgang umgesetzt. Da alle Teile fest miteinander verbunden sind, kann
eine kinematische Grösse rein geometrisch in jede andere, die zu ihr analog ist, umgerechnet werden. Damit lässt sich der Inhalt alle Bewegungsenergiespeicher mit einer einzigen Drehzahl oder mit
nur einer Referenzgeschwindigkeiten angeben. Entsprechend hängen die zugehörigen Änderungsraten mit einer einzigen Beschleunigung zusammen.
Soll bei einer Maschine nur das Antriebsmoment bei gegebener Beschleunigung gerechnet werden,
stellt man eine Momentanenergiebilanz auf. Dabei werden die Leistungen der Kräfte und der Drehmomente den Änderungsraten der Energiespeicher gleichgesetzt. Zählt man die Gravitationsenergie
zum System, darf den Gewichtskräften nicht auch noch eine eigene Leistung zugeschrieben werden.
Nachdem alle Terme notiert sind, gilt es, die Geschwindigkeiten und die auftretenden Beschleunigungen auf je eine Bezugsgrösse umzurechnen. Bei diesem Verfahren achte man auf die richtige
mentale Einstellung. Am besten stellt man sich den Bewegungsablauf vor und überlegt dabei, welche
Speicher Energie aufnehmen und welche Energie abgeben. Ausserdem führe man sich den Transportweg der Energie möglichst plastisch vor Augen. Dazu muss jede Leistung als Energiestrom gelesen werden. Das Vorzeichen gibt dann an, ob die Energie hinein- oder herausfliesst. Sind alle kinematischen Grössen auf eine Referenzbewegung umgerechnet worden, nimmt die Energiebilanz eine
altbekannte Form an: links stehen kraft- oder drehmomentähnliche Grössen, rechts ein Ausdruck, der
entweder als Masse mal Beschleunigung oder als Massenträgheitsmoment mal Winkelbeschleunigung gelesen werden kann.
Interessiert man sich für den Bewegungszustand einer Maschine nach erfolgter Einwirkung, muss
die Energiebilanz über eine Zeitspanne formuliert werden. Bei dieser Form der Bilanz schreibt man
links die in der fraglichen Zeit insgesamt ausgetauschte Energie hin. Rechts zählt man die Energieänderung aller beteiligten Speicher auf. Wieder lassen sich alle Bewegungsgrössen über rein geometrische Beziehungen auf eine einzige umrechnen. Im Gegensatz zur Momentanenergiebilanz ist bei
diesem Verfahren keine Bewegungsgrösse auszuklammern und wegzukürzen.
Unter der Energiebilanz versteht man in der Regel nur die rein buchhalterische Aussage über den
Verbleib der Energie nach einem bestimmten Zeit. Auf die Momenanbilanz glaubt man verzichten zu
können, weil dieselbe Aussage direkt aus den Grundgesetzen ableitbar ist. Dies mag bei einfachen
Problemstellungen zutreffen. Doch immer dann, wenn Zwangs- oder Führungskräfte auftreten, liefert die Energiebilanz einen reduzierten Satz Gleichungen, wogegen aus den Impuls- und Drehimpulsbilanzen bis zu sechs Beziehungen pro Bauteil folgen. Dieses Gleichungssystem muss dann mit
Hilfe der geometrischen Verknüpfungen mühsam auf das richtige Masse vekleinert werden. Die
Energiebilanz verkürzt also bei mechanischen Geräten den Lösungsweg beträchtlich. Andererseits
liefert diese Bilanz keine Angaben über die Grösse der Führungskräfte. Solche Erkenntnisse können
nur mit Hilfe der Grundgesetze gewonnen werden.
Rotationsmechanik
Seite 157
?! Lernzielkontrolle
Wissen, wie man einem Impuls- oder Drehimpulsstrom einen Energiestrom zuordnet, wie die
Leistung einer Kraft oder eines Drehmomentes zu berechnen ist.
1.)
2.)
3.)
4.)
Eine Walze rollt eine schiefe Ebene hinunter. Schneiden Sie das System frei und weisen Sie
jeder Kraft formal eine Leistung zu.
In der Kette eines Fahrrades fliesst, sobald der Velofahrer auf die Pedale drückt, ein beträchtlicher Impulsstrom. Wie ordnet man diesem Impulsstrom einen Energiestrom zu? Wann ist der
zugeordnete Energiestrom gleich der umgesetzten Leistung?
Eine Antriebswelle, die mit höchstens 50 Nm belastet werden darf, soll eine Leistung von 2
kW übertragen. Wie gross muss die Drehzahl der Welle mindestens sein?
Eine Bohrmaschine dreht sich 250 Mal in der Minute gibt dabei eine Leistung von 500 W ab.
Mit welchem Drehmoment wirkt der Bohrer auf die Unterlage ein?
Die Änderungsrate der Gravitations-, der kinetischen und der Rotationsenergie eines Körpers
formulieren können.
5.)
6.)
7.)
8.)
Ein Fahrzeug, das anfänglich in Ruhe ist, erfährt während einer gewissen Zeit eine konstante
Beschleunigung. Wie sieht die Änderungsrate der kinetischen Energie in Funktion der Zeit
aus?
Wie hängt die Änderungsrate der Rotationsenergie mit den Grössen Winkelgeschwindigkeit
und Winkelbeschleunigung zusammen?
Darf man behaupten, dass die Änderungsrate der potentiellen Energie gleich gross ist wie die
Leistung der Gewichtskraft?
Eine Walze rollt eine schiefe Ebene hinunter. Wie kann die Änderungsrate der Bewegungsenergie beschrieben werden?
Wissen, wie man mit Hilfe des Schnittbildes eine Momentanenergiebilanz aufstellt.
9.)
Eine Walze rollt eine schiefe Ebene hinunter. Zwischen dem Rollkörper und der Unterlage tritt
eine sogenannte Rollreibung auf. Schneiden Sie die Walze frei und formulieren Sie die
Momentanenergiebilanz.
10.) Bei einem Jo-Jo bewegt sich der Faden zusammen mit der Hand auf und ab. Gleichzeitig rollt
das Jo-Jo selber auf dem vertikal ausgerichteten Faden ab. Schneiden Sie das Jo-Jo frei und
formulieren Sie für eine beliebige Situation die Momentanenergiebilanz.
11.) An einem starr gelagerten Körper, der sich im Moment mit der Winkelgeschwindigkeit ω
dreht, greifen verschiedene Kräfte an. Zudem wirkt vom Lager her ein Reibdrehmoment ein.
Stellen Sie für dieses System eine Momentanenergiebilanz auf und erklären Sie, wie die einzelnen Grössen zu berechnen sind.
Für komplexe Systeme die Energiebilanz zu zwei Zeitpunkten formulieren können.
12.)
Eine anfänglich ruhende Walze rollt eine schiefe Ebene hinunter. Formulieren Sie die Energiebilanz für die Rollstecke s.
13.) Zwei unterschiedlich schwere Klötze hängen an den beiden Enden eines Seils frei in der Luft.
Das Seil selber wird über eine starr gelagerte Umlenkrolle geführt. Wie berechnet man die
Endgeschwindigkeit der Klötze für eine bestimmte “Fallhöhe“? Von den verschiedenen dissipativen Phänomenen ist nur die Lagerreibung zu berücksichtigen.
Seite 158
Rotationsmechanik
A Übungsaufgaben
3.)
In der nebenstehend skizzierten Anordnung hängt ein Metallzylinder (Masse 15 kg) an einem Faden, der über eine Umlenkrolle (Massenträgheitsmoment 0.8 kg·m2, Radius 0.3 m) mit einer
Feder (Richtgrösse 40 N/cm) verbunden ist. Nun wird der Zylinder angehoben, bis die Federspannung verschwindet. Dann
lässt man ihn los.
Wie gross kann die maximale Winkelgeschwindigkeit der Umlenkrolle werden, wenn die Reibungseffekte vernachlässigbar
klein sind?
Wie gross ist die Anfangsbeschleunigung des Zylinders?
Wie stark wird der Zylinder nach einer “Fallhöhe“ von 10 cm
noch beschleunigt?
Das Lager wirke mit einer Reibung von 1 Nm auf die Umlenkrolle ein. Wie gross ist nun die Anfangsbeschleunigung des Metallkörpers? In welcher Position erreicht der Zylinder seine
Maximalgeschwindigkeit? Wie schnell bewegt er sich dann?
5 kg
3 kg
0.4 kg·m2
15 kg
2.)
An einer Art Fadenspule (Massenträgheitsmoment 0. 4 kg·m2)
hängen zwei Klötze (Masse 5 kg und 3 kg). Der Haltefaden des
schwereren Klotzes ist auf einem Zylinder von 40 cm Durchmesser aufgerollt. Der leichtere Körper hängt an einem Faden
mit einem Wickelradius von 10 cm. Bei einer Drehbewegung
der Spule wird der eine Faden aufgerollt und der andere abgewickelt. Für die Lagerreibung kann ein konstanter Wert von 0.5
Nm angenommen werden.
Wie schnell bewegt sich der schwerere Körper, nachdem er sich
aus dem Stillstand heraus um einen Meter abgesenkt hat?
40 N/m
1.)
0.4 kg·m2
Ein Getriebe weise drei Achsen auf. Auf der ersten Achse sitzt ein Zahnrad mit 36 Zähnen.
Dieses Rad treibt ein zweites mit 12 Zähnen. Das dritte Zahnrad, das die Achse mit dem zweiten teilt, ist gleich gross wie das erste und greift in ein viertes Rad mit 18 Zähnen. Alle Körper
auf der ersten Achse weisen zusammen ein Massenträgheitsmoment von 0.05 kg·m2 auf. Der
zweite Rotator hat eine Drehträgheit von 0.12 kg·m2 und für die dritte Achse kann ein Wert von
0.8 kg·m2 angenommen werden. Von den Lagern her wirkt ein Reibdrehmoment von 0.2 Nm
auf jede der drei Achsen ein.
Nun greift an der Antriebsachse ein Drehmoment von 15 Nm an. Wie gross muss das Drehmoment sein, das auf die Abtriebsachse einwirkt, damit sich das Getriebe gleichförmig dreht?
Das ganze Getriebe soll in 0.2 s gleichmässig hochgefahren werden, bis sich die dritte Achse
mit 300 Umdrehungen pro Minute dreht. Die Abtriebsachse sei nicht belastet. Wie gross muss
das auf die Antriebsachse einwirkende Drehmoment sein?
Das erste Zahnrad dreht sich anfänglich mit 1500 Umdrehungen pro Minute. Die Abtriebsachse wird mit einem Drehmoment von 50 Nm gebremst. Wie lange dauert es, bis das Getriebe
stillsteht? Wieviel Energie ist dann in der Bremse dissipiert worden?
Rotationsmechanik
5.)
6.)
Eine Walze (Masse 30 kg, Radius 15 cm)
wird von einem zweiten Körper (Masse 15
kg), der über einen Faden und eine Rolle
(Massenträgheitsmoment 0.4 kg·m2, Radius 20 cm) am Umfang der Walze angreift,
in Bewegung versetzt. Welche Geschwindigkeit erreicht die Walzenachse, wenn
der zweite Körper 20 cm an Höhe verloren
hat?
30 kg
0.4 kg·m2
15 kg
40 kg
120 cm
Ein Hebel besteht aus einem Stab (Länge
1.2 m, Masse 20 kg) und einem als Gegengewicht dienenden Zylinder (Masse 40 kg,
20 kg
Durchmesser 20 cm). Die Drehachse befindet sich 20 cm von der Zylindermitte
entfernt auf der Symmetrieachse des Stabes. Eine Feder, die über eine Schnur am
Umfang des Zylinders angreift, hat die
Aufgabe, den Hebel aus der horizontalen
Lage heraus vertikal aufzurichten.
Die Feder soll so beschaffen sein, dass sie den Hebel in jeder Lage zwischen der Horizontalen
und der Vertikalen mindestens im Gleichgewicht zu halten vermag. Zudem soll sie bei senkrechter Stellung völlig entspannt sein. Reibungseffekte sind zu vernachlässigen.
Wie gross muss die Federkonstane sein?
Mit welcher Winkelgeschwindigkeit durchquert der Hebel die vertikale Stellung, wenn man
ihn in der horizontalen Lage losgelassen hat?
Welche Winkelbeschleunigung erfährt der Hebel bei waagrechter Ausrichtung?
Ein Pendel, das aus einem Stab (Länge 1.6 m, Masse 10
5 kg
kg) und einer Kugel (Masse 10 kg, Durchmesser 20 cm)
10 kg
10 kg
besteht, soll einen zweiten Körper (Masse 5 kg) in eine
vertikale Schwingung versetzen. Dieser Körper hängt an
160 cm
einer Schnur, die um den Umfang eines starr mit dem Pendel verbundenen Zylinders (Masse 5 kg, Radius 40 cm) gewickelt worden ist. Die Achsen des Wickelzylinders und
des Pendels fallen zusammen und befinden sich 40 cm vom
freien Ende des Pendelstabes entfernt. Nun wird das gut
gelagerte Pendel um 90˚ ausgelenkt und losgelassen.
Wie schnell bewegt sich der aufgehängt Klotz, in dem Moment, in dem das Pendel genau vertikal ausgerichtet ist?
Wie gross ist dann seine Beschleunigung?
Berechnen Sie für diesen Zeitpunt die Seilkraft.
Welche Wirkung übt dann die Achse auf das Pendel aus?
In welcher Lage ist die Winkelbeschleunigung des Pendels gleich Null?
Welchen Wert nimmt dann seine Winkelgeschwindigkeit an?
Wie weit schwingt das Pendel auf die andere Seite? Geben Sie den Winkel an.
Der aufgehängte Klotz werde durch einen grösseren ersetzt. Wie gross darf dessen Masse maximal gewählt werden, damit das Pendel bei gleicher Auslenkung immer noch die vertikale
Lage erreicht?
5 kg
4.)
Seite 159
Seite 160
Rotationsmechanik
7.)
Eine Standseilbahn soll in fünf Sekunden auf eine Geschwindigkeit von 36 km/h gebracht werden. Das Trasse weist ein Gefälle von 50% auf. Der vollbesetzte Wagen (Gesamtmasse 15 t)
befindet sich in der Talstation und der leere Wagen (Masse 12 t) steht bereit für die Talfahrt.
Das Zugseil (Masse 4 t), das die beiden Wagen verbindet, wird von 20 Führungsrollen (Masse
20 kg, Durchmesser 30 cm) positioniert. Von den Lagern her wirkt auf jede Führungsrolle eine
Reibung von 1.2 Nm ein. Für den Einfluss der Schienen auf die beiden Fahrzeuge kann ein
Reibungskoeffizient von 0.04 angenommen werden.
Mit welchem Drehmoment muss der Motor auf das Antriebsrad (Radius 2 m, Massenträgheitsmoment 800 kg·m2, Lagerreibung 10 Nm) einwirken, damit die Wagen die erforderliche Beschleunigung erhalten?
8.)
In der nebenstehend skizzierten Anordnung ist die
Feder (Richtgrösse 2000 N/m) gegenüber dem unbelasteten Zustand um 10 cm verlängert und die
beiden Quader sind noch in Ruhe. Die Reibung im
Lager der Umlenkrolle ist zu vernachlässigen.
Wie schnell bewegt sich der grössere Quader in
dem Augenblick, in dem die Feder entspannt ist?
Wie gross ist dann dessen Beschleunigung? Die
Daten sind der Skizze zu entnehmen.
2000 N/m
10 kg
J = 0.4 kg·m2
Radius 0.2 m
µ = 0.2
2 kg
9.)
Eine Fadenspule (Masse 2 kg, Abrollradius 10
cm, Wickelradius 5 cm, Massenträgheitsmoment 0.004 kg·m2) ist über ein Umlenkrolle
(Durchmesser 10 cm, Massenträgheitsmoment
0.01 kg·m2, Lagerreibung 0.05 Nm) mit einem
aufgehängtem Klotz (Masse 5 kg) verbunden.
Mit welcher Geschwindigkeit senkt sich der
Klotz ab, wenn die Fadenspule aus der Ruhe
heraus um 20 cm nach rechts gerollt ist?
10.) In der nebenstehend skizzierten Anordnung
tritt nur zwischen dem schwereren Klotz
und der Unterlage dissipative Reibung auf.
Der zugehörige Gleitreibungskoeffizient beträgt 0.2. Die Umlenkrolle hat einen Radius
von 0.1 m, ein Massenträgheitsmoment von
0.01 kg·m2 und eine Masse von 2 kg.
Wie stark muss man am schwereren Klotz
horizontal nach links ziehen, damit der
leichtere eine Beschleunigung von 7 m/s2
nach oben erhält?
Mit welcher Kraft wirken dann die beiden
Seile auf die Umlenkrolle ein?
0.01 kg·m2
2 kg
2 kg
10 kg
8 kg
Rotationsmechanik
Seite 161
11.) Ein Pendel, das aus zwei exzentrisch angeordneten Scheiben (Massen 12 kg und 4 kg, Radien 100 mm und 40 mm, Exzentrizität 60
mm) besteht und in der Symmetrieachse der kleinen Scheibe frei
drehbar aufgehängt ist, werde um 90˚ ausgelenkt und dann losgelassen. Am Umfang der kleinen Scheibe ist ein Faden aufgewickelt, an
dem ein kleiner Klotz (Masse 2 kg) und eine Feder (Richtgrösse 10
N/cm) befestigt ist. In der Ausgangsposition ist die Feder gerade entspannt. Die folgenden Fragen beziehen sich auf den Moment, in dem
das Zentrum der grossen Scheibe den tiefsten Punkt durchquert.
Wie gross sind die Geschwindigkeit und die Beschleunigung des
aufgehängten Klotzes?
Mit welcher Geschwindigkeit bewegt sich der unterste Punkt der
grossen Scheibe?
Bestimmen Sie die Beschleunigung des Massenmittelpunktes des
Pendelkörpers und geben Sie an, mit welcher Kraft das Lager auf die
beiden Scheiben einwirken muss, damit diese Bewegung überhaupt
stattfinden kann.
12.) Eine Walze (Masse 6 kg, Radius 5 cm) werde durch ein
Gegengewicht (Masse 4 kg) über ein Rolle (Massenträgheitsmoment 0.002 kg·m2, Radius 5 cm) eine schiefe Ebene (Neigungswinkel 30˚) hinaufgezogen. Ausser der
Lagerreibung in der Umlenkrolle (0.05 Nm) ist keine weitere Energiedissipation zu berücksichtigen.
Welche Geschwindigkeit hat das Gegengewicht nach 20
cm Fallstrecke erreicht?
Wie gross ist dann die Beschleunigung des Körpers?
1000 N/m
2 kg
6 kg
4 kg
Seite 162
Rotationsmechanik
9. Statik
In der Statik werden die Bedingungen untersucht, unter denen ein Körper in Ruhe bleibt. Die Statik
beschäftigt sich also nur mit dem Gleichgewichtszustand eines Systems. Trotzdem wird die ganze
Starrkörpermechanik oft anhand von rein statischen Prinzipien entwickelt. Kraft und Drehmoment
werden dabei zu Grössen degradiert, die sich nur gegenseitig auszugleichen haben. Diese, sich an der
historischen Entwicklung orientierende Methode weist drei Schwachstellen auf. Erstens wird der
Studierende in seinem Vorurteil bestärkt, dass nur ruhende Körper im Gleichgewicht sein können.
Zweitens lernt man bei dieser Vorgehensweise das Drehmoment als geometrische Nebenbedingung
der Kraft kennen. Nichts weist auf den damit verbundenen Austausch eines eigenständigen Drehimpulses hin. Der dritte Nachteil wiegt am schwersten. Die klassische Statik vermittelt dank ihres axiomatischen Aufbaus oft nur blutleeres Formelwissen. Insbesondere findet die ganze Erfahrungswelt
des angehenden Ingenieurs, die sich beim Praktiker zum Bild des Kraftflusses verdichtet hat, kaum
Eingang in die übliche Darstellung der Statik.
Die Physik der dynamischen Systeme beschreitet einen andern Weg. Sie versucht, die in jedem Menschen vorhandene Vorstellung von den statisch belasteten Brücken und Gebäuden direkt in eine wissenschaftlich abgestützte Theorie umzuformen. Die neue Art der statischen Analyse befasst sich
deshalb in erster Linie mit den durch die Wirkung der Gravitation ausgelösten Transportvorgängen.
Der durch das Gravitationsfeld ausgelöste Impulsstrom induziert dank den geometrischen und materiellen Eigenschaften der einzelnen Bauteile zusätzliche Flüsse. Neben dem Impuls strömt auch noch
Drehimpuls durch die belastete Struktur hindurch. Die Impuls-Drehimpuls-Verknüpfung bildet denn
auch den eigentlichen Kern der Statik. Wir haben also zu lernen, wie die beiden Mengen Impuls und
Drehimpuls bei reinen Transportvorgängen lokal miteinander verknüpft sind.
Seile und frei drehbar gelagerte Stäbe können keinen Drehimpuls weiterleiten. Die Funktion des
Seils als Impulsleiter und seine materielle Beschaffenheit, welche keinen Drehimpulstransport
zulässt, haben in unseren Köpfen einen Kraftbegriff geprägt, der viel mehr beinhaltet, als von der
Mechanik her vorgesehen wäre. Ein Seil kann, je nach Orientierung des Koordinatensystems, eine,
zwei oder sogar drei Sorten Impuls transportieren. Dabei fliessen alle drei Impulskomponenten in die
gleiche Richtung, nämlich in die des Seils. Transportrichtung und Ströme sind aber nicht unabhängig
voneinander. Beide Grössen sind so miteinander verknüpft, dass längs des Seils weder Drehimpuls
ausgetauscht noch mitgeführt wird. Als Folge dieser Einschränkung zeigt der Kraftpfeil genau in
Seilrichtung. Kraft- und Seilrichtung fallen also nur zusammen, weil das Seil unfähig ist, Drehimpuls zu transportieren.
Das zweite Bauteil, das wir untersuchen werden, ist der horizontal ausgerichtete Träger. Solche Balken haben die Aufgabe, den gravitativ zufliessenden Impulsstrom seitwärts zur Bezugsrichtung an
die Mauern und Stützpfeiler weiterzuleiten. Mit dem Seitwärtsfliessen erzwingt der Impulsstrom
einen Drehimpulsaustausch. Weil der Drehimpuls selber wieder nur längs des Balkens transportiert
werden kann und der zugehörige Strom von einem zweiten Impulsstrom begrenzt werden muss,
fliessen im belasteten Trägerbalken zusätzliche Impulsströme, deren Stärken den primären Impulsstrom um das vielfache übertreffen können. Damit überlagern sich in einem unter Biegung stehenden
Balken drei verschiedene Transportvorgänge. Der seitwärts abzuführende, vom Gravitationsfeld herkommende Impulsstrom induziert im Träger einen Drehimpulstransport, der weitere, zirkulär verlaufende Impulsströme hervorruft. Diese sekundären Transportvorgänge belasten das Material weit
stärker als der primäre Impulsstrom.
Torsion, neben der Biegung die zweite Form von Drehimpulstransport, haben wir schon einmal
Rotationsmechanik
Seite 163
untersucht. Im Gegensatz zur Biegung, bei der Drehimpuls seitwärts zur Bezugsebene transportiert
wird, fliesst bei der Torsion der Drall vor- oder rückwärts. Die damit verbundenen Impulsströme verhalten sich gerade komplementär: im gebogenen Balken fliessen die begleitenden Impulsströme
längs zur eigenen Bezugsrichtung, bei der verdrehten Welle quer. Ein grundlegendes Prinzip verlangt
nun, dass kein Impulsstrom quer zur eigenen Bezugsrichtung fliessen kann, ohne dass nicht gleichzeitig eine zweite Sorte ebenfalls seitwärts transportiert wird. Konkret verlangt das Prinzip, dass zu
jedem i-Impuls, der in k-Richtung fliesst, ein k-Impulsstrom gehört, der in i-Richtung fliesst. Aufgrund dieses Prinzips wird der im tordierten Stab transportierte Drehimpuls nicht nur von zwei Sorten querfliessenden Impulsströmen begleitet, sondern von der dritten Sorte längs des ganzen
Transportweges wirbelförmig umströmt. Die pro Querschnitt gemessene Stromstärke des Impulsstromwirbels heisst in der Literatur Schubfluss. Anhand der Schubflusserhaltung können Spannungszustände in verdrehten Bauteilen recht gut abgeschätzt werden.
Der letzte Teil des vorliegenden Kapitels befasst sich mit der klassischen Statik. Ausgerüstet mit
einem kohärenten Bild von den Impuls- und Drehimpulstransporten werden wir uns rasch mit den
grundlegenden Prinzipien vertraut machen. Die koordinatenfreie Formulierung des Gleichgewichts
bildet eine natürliche Ergänzung zur Stromdarstellung. Orientiert sich die klassische Analyse eher
am Einzelobjekt, versucht die Stromdarstellung alle beteiligten Körper miteinzubeziehen. Deshalb
liefern Schnittprinzip und Strombild zusammen ein umfassendes Verständnis für das ganze Gebiet
der Statik. Um die Lösungsvorgänge nicht allzustark mit Mathematik zu belasten, werden wir uns
häufig mit ebenen Problemstellungen befassen. Dabei darf jedoch nicht vergessen werden, dass reale
Gegenstände immer dreidimensional sind. Ansonsten besteht die Gefahr, dass Einflüsse, die sich aufgrund der räumlichen Konfiguration ergeben, vergessen werden.
Aus didaktischen Gründen diskutiere ich zuerst das Verhalten der einzelnen Elemente bezüglich
Drehimpulsleitfähigkeit. Erst dann wende ich mich der Frage zu, wie Kräfte und Drehmomente zu
identifizieren sind. Vom fachlogischen Standpunkt aus gesehen, sollte man gerade den umgekehrten
Weg beschreiten. Zuerst müssten die einzelnen Teile freigeschnitten und die Gleichgewichtsbedingungen formuliert werden. Nachher lassen sich die unbekannten Einflussgrössen direkt aus dem so
generierten Gleichungssystem berechnen. Mit Kenntnis der äusseren Kräfte und Drehmomente diskutiere man später die Frage der internen Belastung. Die didaktisch motivierte Umkehrung der üblichen Vorgehensweise hat nun zur Folge, dass eine vollständige Diskussion statisch belasteter
Strukturen frühestens am Schluss des vorliegenden Kapitels möglich sein wird. Diesem Umstand
wird durch die Auswahl der Beispiele Rechnung getragen. Eine vertiefte Fertigkeit im Umgang mit
statischen Problemstellungen kann sich der Leser jedoch erst mit dem Lösen der eigentlichen
Übungsaufgaben aneignen.
Lernziele
Wissen, wie in einem gespannten Seil oder einer belasteten Pendelstütze die Ströme der verschiedenen Impulssorten voneinander abhängen.
In Wort und Bild beschreiben können, wie bei der Biegung der seitwärts fliessende Impuls
einen Drehimpulsstrom hervorruft.
Wissen, wie der in der Bezugsebene herumtransportierte Drehimpuls von sekundären Impulsströmen begleitet wird.
Die Drehimpuls-Impulsstromverknüpfung bei der Torsion mit Hilfe eines Bildes und der zugehörigen Formel beschreiben können.
Aufgaben zur ebenen Statik lösen können.
Seite 164
Rotationsmechanik
9.1 Seile und Stäbe
Seile und Stäbe transportieren
keinen Drehimpuls
Biegsame Seile und beidseits drehbar gelagerte Stäbe können keinen
Drehimpuls transportieren. Folglich darf längs des belasteten Bauteils
auch kein Drehimpuls zu- oder wegfliessen. Gemäss den Überlegungen
aus Kapitel 2 bedeutet dies, dass in einem Seil oder in einem Stab mindestens zweite Sorten Impuls fliessen, sobald die eine Menge schief zur
Bezugsrichtung transportiert wird. Setzen wir uns nur mit ebenen Problemen auseinander, sind höchstens zwei Impuls- und eine Drehimpulssorte beteiligt. Weil die fraglichen Bauteile selber weder Drehimpuls
austauschen noch transpotieren dürfen, weil also kein Drehmoment einwirken kann, muss gemäss Formel (2.1) das Produkt aus der x-Impulsstromstärke und der zugehörigen y-Komponente der Fliessstrecke gleich
gross sein wie das entsprechende Produkt mit dem y-Impulsstrom und
der Strecke längs der x-Achse. Diese umgekehrte Proportion lässt sich
auch mit Hilfe des Neigungswinkels des Seils oder des Stabes formulieren:
I py ∆y
=
= tgβ
I px ∆x
β : Neigungswinkel
(9.1)
Versteht man unter Neigungswinkel die gegen die Horizontale gemessene Grösse, so ist bei der Anwendung von Formel (8.1) die x-Achse
waagrecht und die y-Achse vertikal zu orientieren.
Seilkräfte zeigen in Seilrichtung
Die aus der Formel (2.1) abgeleitete Bedingung kann auch auf die Kräfte übertragen werden. Schneidet man das Seil oder den Stab an einem
Beliebigen Querschnitt entzwei, entsteht ein Actio-Reactio-Paar, dessen
Kraftpfeile in Richtung des Impulsleiters zeigen. Seilkräfte wirken also
genau in Seilrichtung, d.h. Seile zeigen immer die Wirkrichtung der zugehörigen Kraft an. Diese Eigenschaft hat viel zur Popularität des Kraftbegriffes beigetragen. Leider kommt man mit diesem unmittelbar anschaulichen Kraftbegriff nicht allzuweit. Dies lässt sich schon anhand
der Kreisbewegung eines Körpers zeigen. Bewegt sich zum Beispiel ein
Metallstück mit glatter Oberfläche, das an einem Seil festgebunden ist,
auf einer horizontalen Glatteisfläche im Kreis herum, steht die Seilkraft
andauernd normal zur Bewegungsrichtung und damit zum Impuls des
Körpers. Nun verleitet die konstante Seilspannung viele, auch naturwissenschaftlich gebildete Leute zur Annahme, dass die Seil- oder Zentripetalkraft während der Bewegung konstant sei. Assoziert man dann
noch die Bewegungsmenge mit der kinetischen Energie, die bei diesem
Vorgang konstant bleibt, so sieht man sich förmlich gezwungen, eine
unsinnige Zentrifugalkraft einzuführen.
Impulsströme in Seilen
Ein Körper der an einem Seil aufgehängt ist, gibt den über das Gravitationsfeld zufliessenden Impus sofort an das Seil weiter. Bindet man nun
noch ein zweites Seil am Körper fest und zieht diesen etwas seitwärts
weg, so verteilt sich der gravitativ induzierte Impulsstrom auf beide Seile. Weil beiden Teilströme nicht mehr genau vertikal fliessen, lösen sie
Rotationsmechanik
Seite 165
einen zweiten Transport aus, bei dem Horizontalimpuls im einen Seil
abwärts und im zweiten aufwärts strömt. Zu dieser Problematik das folgende Beispiel.
Beispiel 34: Eine Strassenlampe (Masse 15 kg) hängt an zwei Seilen, die
unter einem gegenseitigen Winkel von 60˚ nach oben laufen.
Ein Meter über der Lampe ändern die beiden Seile ihre Richtung und schliessen dann mit der Horizontalebene einen
Winkel von 30˚ ein.
Wie gross sind die Kräfte in den einzelnen Seilabschnitten?
Wie stark ist das Verbindungsstück, das die Richtungsänderung der Seile erst ermöglicht, belastet?
Lösung 34:
Falls die y-Achse nach unten orientiert wird, fliesst von der Lampe her ein y-Impulsstrom mit einer Stärke
von 150 N über beide Seil nach oben weg. Aus Symmetriegründen teilt sich der Strom in zwei gleich
grosse Teiltransporte auf. Der rechte Teilstrom induziert im ersten Seilabschnitt einen nach links unten
fliessenden x-Impulsstrom, der gemäss Formel (9.1) 43.3 N stark sein muss. Im oberen Seilstück steigt der
zugehörige x-Impulsstrom auf 130 N an. Damit kennen wir beide Transporte und können die zugehörigen
Stromstärken in je eine Skizze eintragen.
130 N
x
y
43.3 N
86.7 N
130 N 75 N
43.3 N
x-Impulsstrom
75 N
75 N
75 N
y-Impulsstrom
Die Belastbarkeit des Seils wird in der Regel mit einer maximalen „Seilkraft“ angegeben. Diese Grösse
kann eingezeichnet werden, sobald man das Seil irgendwo mit einer Schnittfläche versieht. Dadurch verwandeltn sich die beiden Impulsstromstärken in die entsprechenden Komponenten des Actio-Reactio-Paares. Die „Seilkraft“ ist also immer gleich dem Betrag der Vektorsumme der hindurchfliessenden
Impulsstromstärken. Für die beiden unteren Seilabschnitte ergibt dies je eine Kraft von 86.6 N.
Die aus der Formel (2.1) abgeleitete Bedingung (9.1) verknüpft nicht Seile transportieren den Impuls
nur die beiden Stromstärken miteinander, sondern macht auch noch eine nur rückwärts
Aussage über die Richtung der Transportvorgänge. Fliesst zum Beispiel
der y-Impulsstrom gegen die Bezugsrichtung, so muss an der gleichen
Stelle auch der zugehörige x-Impulsstrom gegen die entsprechende Koordinatenrichtung fliessen. Für ein unter Zugspannung stehendes Seil
bedeutet dies, dass es unabhängig von der Richtung alle drei Impulssorten nur gegen die jeweilige Koordinatenrichtung transportieren kann.
Ein seilartiger “Kraftleiter“ befördert den Impuls also immer nur rückwärts.
Viele Kunstbauten wie Brücken oder Dachkonstruktionen müssen den Fachwerke
gravitativ zufliessenden Strom seitwärts wegtransportieren. Wie aus
dem oben vorgelösten Beispiel hervorgeht, ist dies mit Seilen nur zu bewerkstelligen, wenn man den y-Impuls schief und unter spitzem Winkel
auf beide Seiten hin abfliessen lässt. Soll der Impuls nur auf eine Seite
abgeführt werden, muss als Leiter ein Balken oder ein Fachwerk einge-
Seite 166
Rotationsmechanik
setzt werden. Ein Fachwerk besteht aus starren Stäben, die beidseits
drehbar gelagert sind, d.h. in den einzelnen Stäben eines Fachwerkes
gilt weiterhin die Bedinung (9.1). Mit dieser Forderung ist die Bauweise
eigentlich schon vorgegeben. Der seitwärts wegzuführende y-Impuls
wird über eine zick-zack-förmige Stabstrecke abgeleitet. Weil in den
einzelnen Stäben der y-Impuls abwechslungsweise einmal gegen und
einmal in die positive Richtung fliesst, gilt für den durch die Forderung
(9.1) induzierten x-Strom die gleiche Regel. Dies impliziert, dass in allen Querstäben der x-Impuls von unten nach oben strömt. Damit der zugehörige Stromkreis geschlossen wird, muss in einem unteren Band der
x-Impulsstrom zu- und in einem oberen wieder weggeführt werden.
N
4·57.7 N
2·57.7 N
x
y
57.7 N
3·57.7 N
x-Impulsstrom
57.7 N
y-Impulsstrom
Fig. 9. - 1: Bei einem Kranausleger wird der gravitativ zufliessende Vertikalimpuls über eine Zick-Zack-Strecke
seitwärts abgeführt. Gemäss Formel (9.1) muss in all den 30˚ schief stehenden Stäben Horizontalimpuls nach
oben fliessen. Das Verhältnis der beiden Stromstärken ist dabei gleich dem Tangens des Neigungswinkels. Am einfachsten führt man den durch den Transport des y-Impulses ausgelösten x-Strom über horizontal gelagerte
Druck- und Zugstäbe zu oder weg.
Schnittprinzip oder Impulstrommethode?
2
3
150 N
1
3
1
2
Beide Beispiele, die aufgehängte Lampe und den Kranausleger, hätte
man auch mit Hilfe des Kraftbegriffes diskutieren können. Bei dieser
Vorgehensweise sind alle Knoten freizuscheneiden und mit Kraftpfeilen
zu versehen. Dabei müssen sämtliche Pfeile in Richtung des Seil- oder
Stabstückes zeigen. Vernachlässigt man bei den einzelnen Bauteilen deren Masse, gilt zwischen den einzelnen Knoten das Wechselwirkungsprinzip. Aus den Gleichgewichtsbedingungen folgen dann die Beträge
der verschiedenen Kräfte. Weil die Forderung, dass die Kraft in Richtung des Stabes oder des Seiles zeigen muss, identisch mit der Bedingung (9.1) ist und weil das Kräftegleichgewicht dem Knotensatz für die
Impulsströme entspricht, ergeben beide Verfahren ein identisches Gleichungssystem. Bei symmetrischen Anordnungen führt die Impulsstromidee eindeutig schneller zum Ziel. Im Falle eines komplizierten
Fachwerkes dürfte das systematisch angewendete Schnittprinzip zusammen mit dem graphischen Lösungsverfahren, das unter dem Namen
Cremonaplan bekannt ist, am anschaulichsten sein. Beschränkt man
sich hingegen auf rein analytische Methoden, geht es also darum eine
Berechnung durchzuführen oder ein entsprechendes Programm zu entwickeln, dürfte die Impulsstrommethode schneller den richtigen Algorythmus liefern.
Rotationsmechanik
Seite 167
Welche Form nimmt ein Seil an, das nur an seinen beiden Enden festge- die differentielle Beschreibunden ist? Wie sieht die Funktion y(x) aus, die den Verlauf des Seiles bung des Seils
beschreibt? Will man diese Frage exakt beantworten, kommt man nicht
um die Lösung einer Differentialgleichung herum. Aufgabe der Physik
ist es, diese Gleichung zu formulieren. Zuerst zerlegen wir das ganze
Seil in lauter kurze Einzelstücke. In jedem dieser Abschnitte sind die
Stromstärken der beiden Menge durch die Bedingung (9.1) gekoppelt.
Lösen wir nun diese Beziehung nach der y-Impulsstromstärke auf und
lassen die Länge des Seilstücks gegen Null gehen, so erhalten wir eine
erste Gleichung
I py = I px ⋅
∆y
dy
= I px ⋅
= I px ⋅ y ′
∆x
dx
(9.2)
Der Strich neben dem Formelzeichen einer Funktion weist darauf hin, die y-Impulsbilanz bezüglich
dass die erste Ableitung nach der Variablen x gemeint ist. Formel (9.2) eines Seilstücks
verlangt also, dass die Stromstärke des y-Impulses an jeder Stelle gleich
dem Produkt aus x-Impulsstromstärke und Seilsteigung ist. Im Gegenx
satz zum x-Impulsstrom, dessen Stärke konstant bleibt, nimmt der y-Impulsstrom infolge der Eigenmasse des Seils zu. Pro Seilstück der Länge
y s
ds liefert das Gravitationsfeld y-Impuls mit einer Rate von m*·g·ds (der
d
Stern neben einem Formelzeichen bedeutet, dass die Grösse durch die
zugehörige Länge dividiert worden ist). Nun formulieren wir die ImIpy2
pulsbilanz für ein kurzes Seilstück: die Änderung der y-Impulsstromstärke längs des infinitesimal kurzen Seilstückes ist gleich gross wie die
Ipy1
auf den Seilabschnitt einwirkende Gewichtskraft m*·g·ds. Die Länge ds
darf mit Hilfe des Satzes von Pythagoras durch die horizontale und die
vertikale Komponente ausgedrückt werden.
I py 2 − I py1 = m * ⋅g ⋅ ( dx )2 + ( dy)2
(9.3)
I py
′ = m * ⋅g ⋅ 1 + ( y ′)2
Die zweite Zeile von (9.3) entsteht aus der ersten durch Division mit dx. die Differentialgleichung der
Die entsprechenden Quotienten sind dann als Differentialquotienten zu Seilkurve
interpretieren. An der tiefsten Stelle fliesst gemäss (9.2) kein y-Impuls
durch den Querschnitt des aufgehängten Seils hindurch. Weil die Ableitung der zugehörigen Stromstärke nach der Variablen x immer grösser
als Null sein muss, fliesst der y-Impuls links vom Minimus in die negative x-Richtung. Rechts davon wächst der Strom kontinuierlich an. Nun
leiten wir Gleichung (9.2) nochmals nach x ab und setzen das Ergebnis
auf der linken Seite von (9.3) ein
y ′′ = c ⋅ 1 + ( y ′)2
c=
m * ⋅g
I px
(9.4)
Die Konstante c in (9.4) ist positiv und besitzt die Einheit einer rezipro- die Seil- oder Kettenlinie
ken Länge. Weil der zweite Faktor, der Wurzelausdruck, unabhängig
vom Ort ebenfalls grösser als Null ist, weist die Seilkurve eine durchgehend konkave Krümmung auf. Zur Integration von (9.4) substituiert
man am besten y’ durch eine neue Funtion in x, separiert dann die Glei-
Seite 168
Rotationsmechanik
chung, führt die Integration durch, macht die Substitution rückgängig
und integriert ein zweites Mal. Als Lösung erhält man im wesentlichen
eine Cosinushyperbolicusfunktion
y=
1
⋅ cosh(c ⋅ x − c1 ) + c2
c
c=
m * ⋅g
− I px
(9.5)
Mit den beiden Integrationskonstanten c1 und c2 kann der Nullpunkt des
Koordinatensystems relativ zum Seil in der Ebene herumgeschoben
werden. Weil eine Kette im homogenen Gravitationsfeld die gleich Gestalt wie ein Seil annimmt, heisst die Kurve auch Kettenlinie.
? Kontrollfragen
1.)
2.)
3.)
4.)
5.)
Welche mengenartige Grösse kann nicht durch ein Seil oder einen drehbar gelagerten Stab
hindurchtransportiert werden? Wie umschreibt man diesen Sachverhalt mathematisch? Geben
Sie eine möglichst exakte Formulierung an.
Wieso zeigt der Kraftpfeil immer in Seilrichtung?
Eine Lampe hängt an zwei unterschiedlich geneigten Seilen. Welches Seil wird stärker belastet. Welche Grösse ist bei beiden Seilen unabhängig vom Neigungswinkel immer gleich
gross?
Wieso weist ein belasteter Kranausleger im unteren Teil immer eine Druckbelastung und im
oberen eine Zugbelastung auf?
Ein Torbogen, der aus einer einzigen Schicht von etwa gleich grossen Steinen geformt werden
soll, ist so zu gestalten, dass zwischen den leicht angeschrägten Seitenflächen nur Normalkräfte auftreten. Welche Form muss die Bogenlinie annehmen?
9.2 Biegung
Ströme beim belasteten Balken
x
y
Biegung entsteht, wenn zum Beispiel ein schwerer Körper mit Hilfe eines Seils in der Mitte eines beidseits aufliegenden Balkens aufgehängt
wird. Dann fliesst der gravitativ dem Körper zugeführte Impuls unmittelbar über das Seil an den Träger weg. Dort teilt sich der Impulsstrom
in zwei Teile auf, von denen der eine nach links und der andere nach
rechts wegfliesst. Diesmal genügt die Bedingung (9.1) nicht, um die
Aufteilung des y-Impulsstromes in zwei Stränge festzulegen. Hier muss
das eigentliche Hebelgesetz (2.1) angewendet werden
Mz = − I py ⋅ ∆x
(9.6)
Weil wir uns in diesem Kapitel hauptsächlich mit der durch die Gravitation ausgelösten Belastung von Körpern beschäftigen wollen, habe ich
von der rechten Seite der Formel (2.1) nur den zweiten Summanden
übernommen. Auf den ersten Teil des ursprünglichen Ausdrucks, der
den Zusammenhang zwischen dem vertikal fliessenden x-Impulsstrom
und der zugehörigen Drehimpulsaustauschrate berschreibt, können wir
hier verzichten.
Rotationsmechanik
Seite 169
Gemäss (9.6) erzeugt der im Balken seitwärts transportierte y-Impuls Drehimpusaustausch bei Biepro Streckenabschnitt ein Drehmoment. Je weiter der Impulsstrom quer gung
fliesst, desto grösser wird die Austauschrate. Dividiert man diese Rate
Drehimpuls
durch den zugehörigen Streckenabschnitt, ergibt sich wieder die Strom-zufuhr
-abfuhr
stärke des erzeugenden Impulsstromes. Formel (9.6) legt auch noch das
richtige Vorzeichen fest. Strömt der y-Impuls zum Beispiel in Richtung
Impulsder x-Achse, ist der Streckenabschnitt ∆x mit positivem Vorzeichen in
strom
x
den Ausdruck (9.6) einzusetzen. Zusammen mit dem ausgewiesenen
Minuszeichen ergibt dies ein negatives Drehmoment, d.h. der Balken
verliert auf diesem Abschnitt fortlaufend z-Drehimpuls. Im umgekehry
ten Fall sorgt ein in die negative x-Richtung fliessender y-Impulsstrom
für eine andauernde, streckenproportionale Drehimpulszufuhr.
Mit dem Lokalisieren des Drehimpulsaustausches haben wir das Pro- Drehimpulsströme bei der Bieblem im Prinzip gelöst. Der vom aufgehängten Körper zufliessende Im- gung
puls teilt sich im Balken drin in zwei Teilströme auf. Nun sorgt der in
negative Koordinatenrichtung fliessende Anteil längs des ganzen TransDrehimpulsstrom
portweges für eine Drehimpulszufuhr und der andere Teilstrom bewirkt
eine Drehimpulsabfuhr. Beide Austauschraten müssen sich exakt wegheben, weil der Drehimpuls weder gespeichert noch über die Stützflächen wegfliessen kann. Der Balken ist also nur dann im Gleichgewicht,
x
wenn der Drehimpulsabfluss die Zufuhr präzis ausgleicht. Diese Aussage beinhaltet den eigentlichen Kern des Hebelgesetzes. In jedem Hebelsystem sorgen die seitwärtsfliessenden Impulsströme dafür, dass an
y
verschiedenen Stellen Drehimpuls zu- oder weggeführt wird. Das Hebelgesetz verlangt nun, dass die Summe über alle Drehimpulsaustauschraten verschwindet. Aufgabe des Hebels ist es, den Drehimpuls vom Ort
des Zuflusses an die Abflussstelle zu befördern. Wie wir noch sehen
werden, erzeugt der dadurch hervorgerufene Drehimpulsstrom zusätzliche Impulsströme. Diese fliessen ausschliesslich im Kreis herum und
belasten den Hebel in der Regel viel stärker als der ursprünglich vorhandene y-Impulstransport.
Beispiel 35: Ein horizontal ausgerichteter Balken, der an seinen beiden Enden aufliegt, werde durch drei Haken in vier
gleich lange Abschnitte unterteilt. Am ersten Haken hängt ein Körper mit einer bestimmten Masse m, am
zweiten ist ein doppelt so schwerer Gegenstand befestigt und der dritte Haken wird mit einem vierfachen
Gewicht belastet. Wie sieht die Drehimpulsstromsträrkefunktion im Balken drin aus?
Lösung 35:
Alle drei aufgehängten Körper wirken als y-Impulsquellen. Von dort fliesst die Bewegungsmenge über die
Haken nach oben an den Balken weiter. Im Träger selber verzweigen sich die drei Ströme. Der Impuls
kann entweder nach links oder nach rechts abfliessen. Die Aufteilung in die beiden Richtungen ist durch
die Drehimpulsblilanz festgelegt: der zufliessende Drehimpulsstrom muss gleich stark wie der aus dem
Balken abfliessenden sein. Zur Berechnung der einzelnen Stromstärken gehen wir wie in der Elektrizitätslehre vor: Zuerst markieren wir die einzelnen y-Impulsstrome im Balken mit einem Bezugspfeil. Um Vorzeichenfehler zu vermeiden, sollten alle Bezugspfeile in die positive x-Richtung zeigen. Nun wählen wir
den Strom im am meisten rechts liegenden Balkenstück aus und bezeichnen dessen Stärke mit einem ausgewählten Buchstaben. Durch konsequentes Anwenden des Knotensatzes erhalten wir für alle Abschnitte
eine wohldefinierte Stromstärke. Insgesamt bleibt nur die anfangs gewählte Grösse unbekannt. Diese ist
Seite 170
Rotationsmechanik
festgelegt, sobald wir verlangen, dass die Summe über alle Drehimpulsstromstärken gleich Null ist.
A-7G
A-6G
A-4G
A
x
G
y
2G
4G
Zur Abwechslung habe ich die y-Impulsstromstärken mit verschiedenen Grossbuchstaben bezeichnet. Nun
berechnen wir mit Hilfe von (9.6) die vier Drehmomente. Gemäss Formel (9.6) sind alle Impulsstromstärken mit der Länge des stromdurchflossenen Stückes zu multiplizieren. Weil alle Ströme schon auf die positive x-Richtung bezogen sind, müssen die zugehörigen Vorzeichen nicht mehr extra festgelegt werden.
Zählt man nun die vier Produkte, die je ein Drehmoment beschreiben, zusammen und setzt die Summe
gleich Null, kann dank der Symmetrie der Anordnung der jeweilige Streckenabschnitt, der ein Viertel der
Gesamtlänge beträgt, wieder weggekürzt werden. Übrig bleibt ein Gleichung, die verlangt, dass 4·A - 17·G
gleich Null ist. Die Auflagekraft A ist also gleich dem Viereinviertelfachen von G. Mit dieser Beziehung
sind auch alle andern Stromstärken festgelegt.
Das Biegemoment
Der vom seitwärts fliessenden Impuls erzwungene Zu- oder Aberfluss
von Drehimpuls führt im Balken zu internen Ausgleichsströmen. Wie
schon erwähnt, muss der auf dem linken Abschnitt zufliessende Drehimpuls durch den Balken auf die rechte Seite transportiert werden. In der
technischen Mechanik nennt man die Stärke dieses Stromes Biegemoment. Kennt man die Geometrie des Balkenquerschnittes und weiss
man, wie sich das Material bei mechanischer Beanspruchung verhält, so
kann mit Hilfe des Biegemomentes die maximal auftretende Impulsstromdichte, der sogenannte kritische Spannungszustand, berechnet
werden. Aus dem Biegemomentenverlauf lässt sich demnach ablesen,
wo der Spannungszustand im Balken drin ein bedrohliches Ausmass angenommen hat.
Die Biegemomentenfläche
Die Stärke des im belasteten Trägers fliessenden Drehimpulsstromes
lässt sich graphisch gegen die Balkenlänge auftragen. Diese Darstellung
heisst Biegemomentenfläche. Der zugehörige Biegemomentenverlauf ergibt sich aus der Formel (9.6), sobald die Stromstärken des seitwärts
fliessenden Impulses bekannt ist. Die Formel besagt, dass pro Balkenstück der Länge ∆x ein Drehimpulsstrom zufliest, dessen Stärke ∆Mz
gleich dem Produkt aus der Stärke des querfliessenden Impulsstromes
Ipy und dem Streckenabschnitt ∆x ist. Der streckenproportionale Zufluss
an Drehimpuls verstärkt den im Träger schon vorhandenen Hauptstrom,
d.h der im Balken nach rechts fliessende Drehimpulsstrom wird so lange
vergrössert, wie y-Impuls nach links strömt. Sobald der y-Impuls selber
in die positive x-Richtung transportiert wird, nimmt die Stärke des
Drehimpulstransportes wieder ab. Angewendet auf unser Beispiel mit
den drei Haken heisst das, dass zwischen den einzelnen, gravitativ induzierten Impulszuflüssen der Drehimpulstransport linear zu- oder abnimmt und dass die Zunahme proportional zur Stärke des im Balken
drin seitwärts fliessenen y-Impulsstromes ist.
ILz
x
Rotationsmechanik
Seite 171
Beispiel 36: Wie sieht der Biegemomentverlauf im vorhergehenden Beispiel aus?
Lösung 36:
Zuerst zeichnen wir die im Balken auftretende y-Impulsstromstärke in Funktion der x-Achse auf. Dann
skizzieren wir den Drehimpulsstromverlauf. Am linken Ende des Balkens kann weder Drehimpuls zu noch
abfliessen. Folglich ist dort die Stromstärke gleich Null. Bis zum ersten Haken fliesst auf dem ganzen Teilabschnitt Drehimpuls zu. Die dort erreichte Gesamtstromstärke kann mit Hilfe von (9.6) berechnet werden.
Im zweiten Abschnitt wird der Drehimpulsstrom weiter verstärkt. Wieder liefert (9.6) den Zuwachs. Im
dritten und vierten Teil des Balkens nimmt die Drehimpulsstromstärke ab. Dass der Drehimpulsstrom beim
rechten Ende des Balkens genau auf Null absinkt, ist kein Zufall. Wir haben das Hebelgesetz ja schon zur
Berechnung der einzelnen Impulsströme angewendet.
I py
ILz
4G
2G
-2G
Die Drehimpulsstromstärke ändert sich offensichtlich umso stärker, je grösser der querfliessende Impulsstrom ist.
Dividiert man Formel (9.6) beidseits durch den Streckenabschnitt ∆x der Biegemomentenverlauf als
und fügt die so gewonnene Änderungsrate pro Länge in die Drehimpuls- Integral
bilanz ein, erhält man einen Zusammenhang für die beiden Balkenströme: der im Balken seitwärts fliessende Impulsstrom ist gleich gross wie
der negative Gradient (Gefälle) der Drehimpulsstromstärke. Umgekehrt
entspricht der Biegemomentenverlauf dem Integral über die Stromstärke
des querfliessenden Impulses in Funktion des zugehörigen Ortes. Graphisch gesehen stellt der Biegemomentenverlauf die Fläche unter der
Querkraft-Balkenlänge-Kurve dar.
Längs des horizontal ausgerichteten, durch reine Gewichtskräfte bela- die mathematische Beschreisteten Balken fliesst sowohl Impuls als auch Drehimpuls. Beide Ströme bung der Biegung
sind durch die Beziehung (9.6) verknüpft. Wählen wir die positive xRichtung nach rechts und die y-Richtung nach unten, so strömt der zDrehimpuls im belasteten Träger immer von links nach rechts. Weil beide Ströme ihre Strärke nur durch Zu- oder Abfluss ändern können, legt
der vertikale Austausch von y-Impuls zusammen mit der Art und Weise,
wie der Balken gehalten wird, die mechanische Belastung eindeutig
fest. Die ganze Problematik kann mit nur zwei Beziehungen mathematisch umschrieben werden. Die erste Gleichung verknüpft den im Balken seitwärts fliessenden Impulsstrom mit dem entsprechenden Zufluss,
den sogenannten Querkräften. Die zweite Gleichung beschreibt die Änderung der zugehörigen Drehimpulsstromstärke. Billigt man dem Balken selber noch eine Masse zu, so muss der vom Gravitationsfeld direkt
in den Träger hineinfliessende Impulsstrom auch noch berücksichtigt
Seite 172
Rotationsmechanik
werden.
dI py = m * ⋅g ⋅ dx + FQ i
dI Lz = − I py ⋅ dx
(9.7)
Die beiden Formeln in (9.7) legen den Biegemomentenverlauf eindeutig
fest. Eine erste Integration bzw. Addition liefert die Stärke des seitwärts
fliessenden Impulsstromes. Die zweite Integration beschreibt dann den
Verlauf des zugehörigen Drehimpulstransportes. Treten Querkräfte FQ
mit punktförmigen Angriffsflächen auf, ändert der im Balken seitwärts
fliessende Impuls seine Stärke sprunghaft. Bei diesen Sprungstelle weist
der zugehörige Biegemomentverlauf jeweils einen Knick auf. Die an
den Balkenenden herrschenden Bedingungen betreffen oft beide Ströme, was zu mathematischen Schwierigkeiten führen kann. Diese lassen
sich teilweise umgehen, indem man den Balken zuerst freischneidet,
alle Kräfte und Drehmomente einzeichnet und die unbekannten Grössen
aus der Gleichgewichtsbedingung ableitet.
Berechnungsverfahren
Beispiel 37: Ein gerader Balken, der einseitig fest eingemauert ist, erleidet durch sein Eigengewicht ein Biegebelastung. Wie sieht der Biegemomentenverlauf aus, wenn der Balken genau horizontal ausgerichtet ist eine
konstane Masse pro Länge (m*) aufweist?
Lösung 37:
Wir nehmen an, dass sich die Mauer rechts vom Balken befindet. Damit fliesst der auf der ganzen Länge
gravitativ zugeführte y-Impuls mit zunehmender Stärke nach rechts weg.
Zur mathematischen Behandlung des Problems, führen wir ein Koordinatensystem ein, dessen Nullpunkt
auf der freien Stirnfläche des Balkens liegt. Mit dieser Wahl liegen alle relevanten x-Werte im positiven
Bereich. Nun integrieren wir die erste Gleichung von (9.7) nach x und erhalten so eine Funktion, die den
Verlauf der Impulsstromstärke wiedergibt. Diese wächst proportional mit x an, wobei der Proportionalitätsfaktor gleich m*·g ist. Die zweite Gleichung von (9.7) verlangt eine nochmalige Integration nach x.
Dies ergibt einen Biegemomentenverlauf, der sich quadratisch mit x ändert.
Mz ≡ I Lz = −
m * ⋅g 2
⋅x
2
Das Minuszeichen weist darauf hin, dass der Drehimpuls von der Mauer her in den Balken hineinfliesst
und diesen auf seiner ganzen Länge mit abnehmender Stärke wieder verlässt.
Drehimpuls kann sich nicht in
Luft auflösen
Drehimpulsstrom
x
?
y
?
?
?
Der Drehimpuls, der im oben diskutierten Beispiel, von der Wand in den
Balken hineinfliesst, um diesen dann bis zur freien Stirnfläche wieder zu
verlassen, darf sich nicht einfach in Luft auflösen. Doch wo geht der
Drehimpuls nachher hin? Lässt sich der Drehimpulstransport über den
Balken hinaus weiterverfolgen? Dazu ein paar grundsätzliche Bemerkungen. In der Statik fliessen alle mengenartigen Grössen mangels Speicher im Kreis herum. Zudem treten Drehimpulsströme nie ohne
begleitende Impulstransporte auf. Mathematisch lässt sich der Zusammenhang zwischen den einzelnen Transportvorgängen durch einen Satz
von partiellen Differentialgleichungen beschreiben. Diese Gleichunge
gelten, solange der Impulstransport im statisch belasteten Material drin
erfolgt. Fliesst die Bewegungsmenge jedoch über das Gravitationsfeld
von einem Körper zum andern, sind weder der Impuls- noch der Drehimpulstrom lokalisierbar. Somit fliesst der Drehimpuls, der aus dem
einseitig eingespannten Balken weggeht, auf unbestimmten Pfaden ins
Innere der Erde ab. Damit der ganze Kreis geschlossen wird, muss der
Rotationsmechanik
Seite 173
Drehimpuls von dort zum Fundament und durch die Mauer nach oben
an das festgehaltene Balkenstück zurückfliessen.
Beispiel 38: Ein Körper der Masse m hängt an einem galgenförmigen Kran. Wie sieht der Biegemomentenverlauf in
den beiden Teilen des Krans aus?
Lösung 38:
Wir wählen das Koordinatensystem wie gewohnt mit der
x-Achs nach rechts und der y-Achse nach unten. Bei dieser Wahl fliesst vom Gravitatiationsfeld her y-Impuls mit
der Stärke m·g in den Körper hinein und von dort über
den Quer- und dann über den Vertikalbalken in die Erde
ab. Im Querbalken induziert der seitwärts fliessende yImpuls einen streckenproportionalen Zufluss von zDrehimpuls. Dieser Drehimpuls muss ebenfalls über den
vertikal ausgerichteten Teil des Galgens an die Erde
abgeführt werden. Dort ändert er aber seine Stromstärke
nicht mehr. Die nebenstehend abgebildete Skizze zeigt
den y-Impulsstrom sowie den Biegemomentenverlauf im
Querbalken. Der nicht gezeichnete Momentenverlauf im
Vertikalstück ist weniger interessant. Dort ist die Drehimpulsstromstärke konstant und gleich dem Maximalwert im Querbalken.
Sobald ein System ausgezeichnet oder eine Schnittfläche
definiert wird, heissen Impuls- und Drehimpulsströme
Kräfte und Drehmomente. Grenzt man den galgenförmigen Kran gegen die Umgebung ab, lassen sich zwei
Kräfte identifizieren. Eine greift vom Seil her an und die
andere wirkt vom Boden auf das unteren Ende des senkrecht stehenden Balkens ein. Dort tritt zudem noch ein
reines Drehmoment auf. Solange wir dem Kran keine
Masse zubilligen, bilden die beiden Kräfte ein Paar, das
die Wirkung des reinen Drehmomentes exakt kompensiert.
a
x
y
M
Mmax= m·g·a
x
Im soeben diskutierten Beispiel quillt der Impuls volumenmässig aus Impulsströme im Gravitationsdem Gravitationsfeld in den aufgehängten Körper hinein, um dann über feld
das Seil und den galgenförmigen Kran an die Erde abzufliessen. Irgendwo im Innern der Erde muss der Impuls wieder ans Gravitationsfeld abgegeben werden, damit er von neuem im Körper erscheinen kann. Der
über das Gravitationsfeld fliessende Impuls hinterlässt keine nachweisbaren Spuren. Ohne eine vollständige Gravitationstheorie lässt sich der
Weg, den der Impuls im Feld drin einschlägt, nicht verfolgen. Was im
Falle des elektromagnetischen Feldes noch exakt möglich ist, nämlich
eine vollständige Beschreibung der lokal vorhandenen Energie- und Impulstransportes, schafft man beim Gravitationsfeld nur noch näherungsweise. Zudem ist die zugehörige Theorie, die allgemeine Relativitätstheorie, für solche Überlegungen viel zu kompex.
Ohne präzise Kenntnisse der Impulsströme lassen sich keine näheren geschlossene DrehimpulsAngaben über den Verlauf der begleitenden Drehimpulstransporte ma- kreise
chen. Deshalb wenden wir uns nun einer statischen Anordnung zu, bei
der das Gravitationsfeld nicht an den Transportvorgängen beteiligt ist.
Seite 174
Rotationsmechanik
Beispiel 39: Zwei gleich lange Balken, die parallel auf einer horizontalen Unterlage ausgerichtet sind, werden von zwei
Federn zusammengezogen. In der Mitte zwischen den beiden Federn drückt ein Stab die Balken auseinander. Die Federn sind somit auf zug und der Stab auf druck belastet. Wie fliessen die beiden Impulssorten
der zugehörige Drehimpuls durch diese Anordnung hindurch?
Lösung 39:
Zuerst führen wir ein raumfestes Koordinatensystem ein, das den Impuls in zwei Sorten zerlegt. Die xAchse zeige in Richtung der Balken und die y-Achse soll parallel zu den Federn ausgerichtet sein. Im
zusammengedrückten Stab fliesst dann y-Impuls vorwärts d.h. in Richtung der positiven Achse von einem
Balken zum andern. Im Balken angelangt, verzweigt sich der Strom. Beide Teilströme fliessen längs der
zugehörigen Balkenhälften nach aussen, um dann durch die Federn an den Ursprungsort zurückzuströmen.
Mit Hilfe der Formel (9.6) lässt sich der Weg, den der Drehimpuls nimmt, verfolgen.
x
y
Der Drehimpuls fliesst auf der rechten Seite der Anordnung gegen die y-Achse und auf der linken wieder
zurück. Der ganze Stromkreis schliesst sich, indem im oberen Balken Drehimpuls nach links und unten
nach rechts fliesst. In der Balkenmitte strömt am meisten Drehimpuls durch den Balkenquerschnitt hindurch. An dieser Stelle tritt das grösste Biegemoment auf und dort würden die beiden Bauteile auch auseinanderbrechen, wenn die Belastung zu gross wird.
Drehimpulsströme zwischen
beschleunigten Körpern
In einer statischen Anordnung drin sind Impuls- und Drehimpulsströme
lokal verknüpft. Jeder Drehimpulstransport wird von einem Impulsstrom begrenzt und die Verknüpfung lässt sich geschlossen darstellen.
Im Anhang habe ich den vollständigen Satz von Verknüpfungsgleichungen angegeben. Wendet man diese Beziehungen auf bewegte Körper an,
liefern sie keine eindeutigen Resultate oder führen zu absurden Ergebnissen. Wird nun Vversucht, das Gleichungssystem von den Strömen auf
die Speicher zu erweitern, stösst man auf unüberwindliche Schwierigkeiten. Dafür können mindestens zwei Gründe angegeben werden. Einerseits tranportieren die Körpern, indem sie sich bewegen, selber
Impuls durch den Raum. Andererseits verlangt die Relativitätstheorie,
dass der Drehimpuls im allgemeinen Fall aus sechs und nicht nur aus
drei Sorten besteht. Eine dritte Ursache dürfte in der neuen Physik, der
Quantenmechanik, zu finden sein. Elementarvorgänge lassen sich gemäss der neuen Philosophie nicht mehr in ein einfaches wenn-dannSchema pressen. Trotz dieser theoretischen Schwierigkeiten eignet sich
die Stromdarstellung als Hilfsmittel zur Lösung ausgewählter Probleme.
Rotationsmechanik
Seite 175
? Kontrollfragen
6.)
7.)
Wann tritt bei einem Balken Biegung auf?
Wie fliesst der gravitativ zugeführte Impuls durch eine alte Apothekerwaage hindurch? Wie
fliesst der dabei induzierte Drehimpulsstrom?
8.) Welche Grösse wird mit dem Biegemomentverlauf graphisch dargestellt?
9.)
Zwei Kinder sitzen auf einer horiozontal ausgerichteten Wippschaukel. Wie verläuft das Biegemoment im Querbalken der Schaukel?
10.) Ein lange Holzlatte, die auf beiden Seiten aufliegt, biegt sich unter dem Eigengewicht durch.
Wie sieht der zugehörige Biegemomentenverlauf aus.
11.) Ein stabiler Metallring, der einen Durchmesser von etwa einem halben Meter aufweist, wird
diametral mit beiden Händen gepackt. Nun versucht man den Ring zu verformen, indem man
ihn mit beiden Händen auseinanderzieht. Wie sieht der dadurch induzierte Drehimpulsstrom
aus?
9.3 Impuls- und Drehimpulsströme bei Biegung
Im Kapitel 2 haben wir uns ein erstes Mal mit den Eigenheiten des Impulskreisströme schliessen
Drehimpulstransportes beschäftigt. Dabei konnten wir festgestellt, dass einen Drehimpulsstrom ein
praktisch alle Drehimpulsströme von mindestens einem Impulsstrom
umgeben sind. Fliesst zum Beispiel z-Drehimpuls in einem Riementrieb
in Richtung der positiven x-Achse, so strömt parallel dazu x-Impuls im
Riemen von einer Scheibe zur andern und über die Lager wieder zurück.
Im Zusammenhang mit der Biegung sind wir nun ein weiteres Mal auf
diesen Sachverhalt gestossen. Damit die einzelnen Drehimpulstransporte besser gegeneinander abgegrenzt werden können, modifiziere ich das
letzte Beispiel aus dem vorangegangenen Abschnitt ein wenig. Dazu ersetze ich die beiden Federn durch vier Gewindestangen.Belastet man
nun zwei Stangen auf Zug und die beiden andern auf Druck, werden
zwei getrennte Impulskreisströme induziert, zwischen denen je ein
Drehimpulsstrom fliesst.
x
y
Fig. 9. - 2: Werden zwei
Vierkanthölzer mit vier Gewindestangen so fixiert, dass
je zwei Verbindungsstäbe auf
Druck und zwei auf Zug
beansprucht werden, bilden
sich zwei getrennt Impulsströme aus, die je einen
Drehimpulsstrom umschliessen. Der Drehimpulsstromkreis selber ist über die
beiden Balken kurzgeschlossen.
Zwischen den beiden linken Gewindestangen fliesst der Drehimpuls ge- die seitliche Begrenzung eines
gen die die y-Richtung. Sobald er das Vierkantholz erreicht hat, wird er seitwärts fliessenden Drehimnach rechts transportiert, um dann über das andere Stangenpaar und das pulsstromes
Seite 176
Rotationsmechanik
zweite Holz an den ursprünglichen Ort zurückzukehren. Die Stärke des
in den Hölzern drin fliessenden Drehimpulsstromes heisst, wie wir
schon wissen, Biegemoment. Konsequenterweise müsste man die Stärke
des zwischen den Gewindestangen fliessenden Drehimpulsstromes auch
so nennen. Den Ausdruck Biegemoment verwendet man jedoch nur für
die Drehimpulströme, die zur Hauptsache im Innern eines Festkörpers
verlaufen. Trotz dieser begrifflichen Nuancen präsentiert sich der ganze
Drehimpulskreis als eine Einheit: auf allen vier Abschnitten beranden
Impulsströme den Drehimpulstransport. Nur sind die Impulsströme im
Balken drin anders als bei den Gewindestangen inhomogen und weniger
stark lokalisiert. Sie deformieren aber auch dort das Material und reissen es bei Überbeanspruchung auseinander.
Der Impulsstrom, der den Drehimpulstransport im linken Teil der Anordnung 2.-9 umkreist, legt zusammen mit der Breite des durchflossenen Gebietes im Sinne von Kraft mal Hebelarm die Drehimpulsstromstärke fest. Die zugehörige Formel, der zweite Ausdruck in (9.7), darf
nun in etwas modifizierter Form auch quer zum Drehimpulsstrom angewendet werden. Dies folgt aus der Erhaltung der beteiligten Grössen.
Um eine differenzielle Beschreibung zu ermöglichen, zerlegt man vorgängig das ganze Stromgebiet in beliebig schmale Streifen. Die neue
Gleichung gilt dann nur noch für die Stromstärken, die bezüglich solcher Streifen gemessen worden sind.
Zugebelastung
Die Drehimpuls-Impuls-Verknüpfung längs des Transportweges
max. Drehimpulsstrom
Der einzige Unterschied zwischen dem Transport im Stangen- und im
Balkenbereich liegt bei der räumlichen Verteilung der begleitenden Impulsströme. Bei den Gewindestangen ist der Impuls an die kleinen Querschnitte der Spannelemente gebunden, wogegen er im belasteten Balken
durch die ganze Querschnittfläche fliessen kann. Weil bei den beiden
Balken diskrete Leiterbahnen fehlen, muss die Verknüpfung zwischen
der Impuls- und der Drehimpulsstromstärke differentiell beschrieben
werden. Bevor ich die Gleichung formuliere, soll in wenigen Sätzen umschrieben werden, wie der Drehimpuls zusammen mit dem Impuls ein
Gebiet durchquert. Auf der linken Seite der Anordnung in Figur 9.-2
fliesst im oberen Balken y-Impuls mit konstanter Stromstärke gegen die
x-Richtung und erzwingt dabei gemäss Formel (9.6) eine z-Drehimpulszufuhr. Da die Zufuhrrate pro Streckenabschnitt proportional zum querfliessende Impulsstrom ist und dieser im fraglichen Abschnitt konstant
bleibt, ist die Drehimpulsstromstärke gleich dem Produkt aus der Stromstärke des y-Impulses und dem Abstand der beiden Gewindestangen,
d.h. das auf dieses Balkenstück einwirkende Drehmoment ist gleich
Kraft mal Hebelarm. Im Gegensatz zu vielen früheren Beispielen wissen
wir hier aber sehr genau, woher der Drehimpuls kommt: er fliesst zwischen den beiden Gewindestangen zu. Dabei wird er links und rechts
von einem y-Impulsstrom begrenzt.
Druckbelastung
Impulsströme umkreisen den
Drehimpulstransport
+
dI pz+ = − I py
⋅ dx
(9.8)
Formel (9.8) verknüpft den y-Impulsstrom mit dem z-Drehimpulstrans-
Rotationsmechanik
Seite 177
port. Sie gilt, solange beide Grössen in y-Richtung fliessen. Die beiden
Kreuzchen weisen darauf hin, dass mit I eine differentielle Grösse, also
eine Stromstärke pro Streifen mit der Breite dx, gemeint ist. Gleichung
(9.8) kann auch auf Ströme angewendet werden, die in x-Richtung fliessen. Dazu muss auf der linken Seite die x-Impulsstromstärke pro dy und
das Linienelement in y-Richtung hingeschrieben werden. Zudem fällt
das Minuszeichen weg.
+
⋅ dy
dI pz+ = I px
(9.9)
Die Kernaussage ist in beiden Gleichungen identisch: ein Drehimpulsstrom kann seine Stärke seitwärts zur Transportrichtung nur ändern,
wenn an dieser Stelle ein parallel fliessender Impulsstrom vorhanden ist.
Umgekehrt bewirkt jeder Impulsstrom, der in einer statischen Anordnung das Material auf Zug oder Druck belastet, eine Änderung der
Stromstärke des parallel dazu fliessenden Drehimpulses. So grenzt bei
einem Riementrieb der gespannte Flachriemen das drehimpulsdurchflossene Gebiet seitlich gegen den stromfreien Raum ab.
Eine erste Integration der Gleichung (9.8) über x liefert die Änderung, die Integration der lokalen Verwelche die differentielle Drehimpulsstromstärke auf dem zugehörigen knüpfung
Abschnitt erfährt. Sucht man nach dem absoluten Wert dieser Grösse,
diff. Impulsstromstärke
muss die Integration aus einem drehimpulsstromfreien Gebiet heraus erfolgen. Da weder der Drehimpuls noch seine Ströme direkt Spuren hinerste Integration
terlassen, ist der experimentelle Nachweis der absoluten Stromfreiheit
gar nicht möglich. Die Drehimpulsstromstärke ist immer eine relative diff. Drehimpulsstromstärke
Grösse und ihr Wert hängt vom gewählten Bezugspunkt ab. Durch eine
zweite Integration
zweite Integration über x gewinnt man aus der differentiellen Drehimpulsstromstärke die totale. Damit ist das Berechnungsverfahren für die
tot. Drehimpulsstromstärke
Materialbelastung bei ebener Biegung im Prinzip festgelegt: aus der Impulsstromverteilung kann durch zweimaliges Integrieren die Drehimpulsstromstärke oder das Biegemoment berechnet werden. Die der
Integration zugrundeliegende Funktion, die genaue Impulsstromverteilung, erhält man jedoch erst, wenn die Geometrie des Balkenquerschnitts und das Spannungs-Dehnungsverhalten des Materials bekannt
ist.
Statt Holzbalken mit quadratischem Vollquerschnitt verwendet man oft der Doppel-T-Träger
Doppel-T-Träger aus Stahl. Den Namen verdankt dieser Träger der
Form seines Querschnitts, besteht er doch aus einem dünnwandigen
Steg und zwei rechtwinklig dazu angeschweissten Gurten. Die Wirkweise eines horizontal ausgerichteten Tägers lässt sich anhand des DoppelT-Balkens sehr gut erklären. Jeder Stützbalken hat primär die Aufgabe,
den in einem Gebäude gravitativ zufliessenden Impuls abzuleiten. Indem der Vertikalimpuls im Steg des Doppel-T-Trägers seitwärts zu seiner Bezugsrichtung abfliesst, induziert er einen streckenproportionalen
Drehimpulsaustausch. Dieser Drall fliesst dann ebenfalls längs des Balkens. Doch im Gegensatz zum Impuls kann der Drehimpuls nicht einfach über eine der beiden Stützstellen wegfliessen. Der Träger müsste
Seite 178
Rotationsmechanik
dazu mindestens an einem Ende fest eingemauert sein. Stattdessener
wird der induzierte Drehimpulsstrom mit veränderlicher Stärke von einem Balkenabschnitt zum andern transportiert. Dabei erzeugt er einen
sekundären Impulsstromkeis, der den Drehimpulstransport beidseits begleitet und dabei die Gurten belastet. Auf der Druckseite strömt der sekundäre Impuls mit und auf der Zugseite gegen seine eigene
Bezugsrichtung.
Die Funktion der Gurten
z-Drehimpuls
y-Impuls
z-Drehimpuls
x-Impuls
x-Impuls
Drei mengenartige Grössen fliessen bei der ebenen Biegung durch den
belasteten Träger: der seitwärts wegfliessende Vertikalimpuls, der dadurch ausgetauschte Drehimpuls und der Horizontalimpuls, der den
Drehimpulstransport mit einem Kreisstrom umgibt. Der Querschnitt des
Doppel-T-Trägers verknüpft nun diese drei Mengenströme optimal miteinander, d.h. mit möglichst wenig Material wird ein maximaler Drehimpulsstrom weitergeleitet. Der begleitende Impulsstrom ist dabei
räumlich ähnlich wie bei den Gewindestangen verteilt. Nur fliesst er
statt durch zwei völlig getrennten Leiter hauptsächlich in den beiden
starr verbundenen Gurten. Dazwischen baut sich im Belastungsfall auf
der ganzen Balkenhöhe ein praktisch homogener Drehimpulsstrom auf.
Nur im Bereich des Stegs sieht die Sache etwas komplizierter aus. Dort
fliesst neben dem querströmenden Vertikalimpuls auch noch ein schwacher Strom der Horizontalsorte im Kreis herum, was einen zusätzlichen
Drehimpuls ermöglicht
Beton kann den Impuls nicht
zurückleiten
Beton, im Brücken und im Hochbau der häufigst verwendete Baustoff,
erträgt selber keine Zugspannung. Deshalb werden spezielle Armierungseisen eingelegt, welche die zurückfliessenden Impulsströme aufnehmen müssen. Der Bauingenieur baut also überall dort viel Eisen ein,
wo ein Träger eine Zugspannung erleidet. Ein anderes Konstruktionsprinzip lässt schon gar keine Zugspannungen entstehen. Bei den sogenannt vorgespannten Brücken werden die tragenden Elemente mittels
Stahlseilen zusammengedrückt. Bevor das Bauwerk belastet ist, fliesst
Impuls durch die Zugseile rückwärts und im Beton vorwärts. Sobald
Vertikalimpuls abgeleitet werden muss, belasten die dadurch induzierten
Drehimpulstransporte die Bauteile auf Biegung. Dann fliesst im unterer
Bereich des Querschnitts entsprechend weniger Horizontalimpuls durch
den Beton als im oberen Teil.
Hookesches Gesetz
Viele Werkstoffe zeigen bei kleiner Beanspruchung ein lineares Spannungs-Dehnungs-Verhalten. Besteht ein homogener Trägerbalken aus
einem solchen Material, so dürfen wir näherungsweise annehmen, dass
eine ebene Querschnittfläche bei Biegung wieder in eine ebene Fläche
übergeht. Dann wachsen die Zug- bzw. die Druckspannungen linear mit
dem Abstand von den unbelasteten Stellen, den neutralen Fasern, an.
Solange sich das Material eines Trägers linear verhält, solange es das
Hookesche Gesetz erfüllt, können die Spitzenwerte der Zug- und Druckspannung alleine aus dem Biegemoment und der Geometrie des Querschnitts berechnet werden.
Rotationsmechanik
Seite 179
Beispiel 40: Bei einem auf Biegung belasteten, rechteckigen Metallbalken sei das Biegemoment an einer bestimmten
Stelle bekannt. Der z-Drehimpulsstrom fliesse in Richtung der positiven x-Achse. Dann erzeugt er in der
unteren Hälfte eine Zugspannung und im ob eren Teil eine Druckbelastung. Infolge des linearen Materialverhaltens nimmt die Impulsstromdichte von der Oberseite her kontinuierlich ab, bis sie an der Unterseite
den kleinsten Wert, die betragsmässig grössten Zugbeanspruchung, erreicht hat. Wie hängt diese Zugspannung mit dem Biegemoment zusammen?
Lösung 40:
Im Balken der Höhe h fliesst parallel zu dessen Längsachse ein z-Drehimpulsstrom in die positive x-Richtung. Weil der begleitende x-Impulsstrom längs der y-Richtung linear vom grössten Wert (Druckspannung)
auf den kleinsten (Zugspannung) abnimmt, ist gemäss Formel (9.8) der
zugehörige z-Drehimpulsstrom quadratisch verteilt. Zur formelmässigen
Auswertung platzieren wir den Koordinatennullpunkt an die Stelle, an
der der Balken nicht belastete ist (die durch die Biegung nicht beanspruchten Balkenelemente heissen auch neutrale Fasern). Damit wächst
die differentielle x-Impulsstromstärke proportional zur y-Koordinate an.
Nun bezeichnen wir die Proportionalitätskonstante mit -c und integrieren
diese Impulsstromstärke pro Breite ein erstes Mal nach y. Als Ergebnis
erhalten wir eine quadratische Funktion, die gemäss (9.8) die differentielle Stärke des z-Drehimpulsstromes beschreibt.
I Lz+ ( y) =
y
y
+
∫ I px ⋅ dyƒ =
∫ (−c) ⋅ yƒ ⋅ dyƒ =
−h / 2
−h / 2
-h/2
+
Ipx
h/2
y
c h2
⋅ ( − y2 )
2 4
Weil wir voraussetzen, dass ausserhalb des Balkens kein Drehimpuls transportiert wird, verschwindet die
differentielle Drehimpulsstromstärke an der Unter- und an der Oberseite des Balkens. Ihren Maximalwert
erreicht diese Grösse im Bereich der neutralen Fasern. Dort kann kein parallel fliessender Impulsstrom ein
Änderung der lokalen Drehimpulsstromstärke bewirken. Eine zweite Integration über y liefert das Biegemoment oder die totale Drehimpulsstromstärke.
h/2
I Lz =
∫ I ⋅dy =
+
Lz
−h / 2
c h2
c ⋅ h3
2
⋅
(
−
y
)
⋅
dy
=
∫ 2 4
12
−h / 2
h/2
Die Zug- oder Druckspannung lässt sich aus der differentiellen Impulsstromstärke berechnen. Dazu dividiert man diese durch die lokale Breite des Balkens. Folglich steigt bei unserem Balken mit rechteckigem
Querschnitt und linearem Materialverhalten die Zug- oder Druckspannung auf den Wert (c·h)/(2·b) an.
Damit ist der Proportionalitätsfaktor gleich dem zwei-b-Fachen der maximalen Zug- oder Druckspannung
dividiert durch die Balkenhöhe. Nun sind wir in der Lage, einen algebraischen Zusammenhang zwischen
dem Biegemoment M, d.h. der Drehimpulsstromstärke, und der maximalen Druck- oder Zugspannung σmax
herzustellen
M = I Lz =
c ⋅ h 3 b ⋅ h 2 ⋅ σ max
=
12
6
Die Annahme, dass die Zug- oder Druckspannung linear mit dem Abstand von den neutralen Phasern
anwächst, dürfte bei Holz kaum zutreffen. Folglich ist der hier hergeleitete Zusammenhang zwischen dem
Biegemoment und der maximalen Spannung bei Werkstoffen, die nicht dem Hookeschen Gesetz unterliegen, kaum sehr präzis.
Wird der Doppel-T-Balken durch einen einfachen T-Träger ersetzt, fällt Träger mit beliebigem Quermit dem unteren Gurt ein Impulsleiter weg. Der x-Impuls, der bei gravi- schnitt
tationsbedingter Biegung im oberen Querband in die negative Koordinatenrichtung fliesst, kehrt dann im Steg drin zurück, womit infolge der
Asymmetrie Formel (9.9) nicht mehr direkt angewendet werden darf.
Eine eingehendere Untersuchung würde zeigen, dass im einfachen T-
Seite 180
Rotationsmechanik
Träger ein zusätzlicher Strom induziert wird, der y-Drehimpuls transportiert und den Steg aussen umfliesst. Damit steigt die Zahl der involvierten Mengen auf vier. Selbstverständlich kann man auch diesen Belastungsfall vollständig lokal beschreiben. Nur bilden all die miteinander
verhängten Stromdichten ein sehr kompliziertes Rechenschema.. Bei
reiner Biegung reicht eine halblokale Beschreibung völlig aus. Die zugehörigen Drehimpulsströme lassen sich dann viel einfacher mit Hilfe
des Hebelgesetzes ermitteln.
Drehmomente, die auf den
Querschnitt einwirken
dM
dA
r
z
y
Ein belastete Trägerbalken transportiert unabhängig von der Geometrie
seines Querschnitts Drehimpuls seitwärts zur Bezugsrichtung. Der Impulskreis, der diesen Transport umgibt, beansprucht das Material auf der
einen Seite auf Zug und auf der andern auf Druck. Weil sich die Impulsstromdichte innerhalb eines nicht durchbrochenen Querschnitts kontinuierlich ändert, d.h. weil der Übergang von Zug- auf Druckbelastung
keine Sprünge aufweist, muss das Material an mindestens einem Punkt
spannungsfrei sein. Wenn wir nun gedanklich allen x-Impuls gegen diesen neutralen Punkt strömen lassen, fällt die Berandung für den Drehimpulstransportweg weg. Der Drall könnte so nicht mehr weiter durch den
Träger fliessen. Er müsste entweder in diesem Querschnitt gespeichert
oder an einen zweiten Stromkreis weitergereicht werden. Mit diesem
Gedankengang haben wir den ausgewählten Balkenquerschnitt in einen
starrer Körper verwandelt, auf den von einer Seite her die flächig verteilte Schnittkraft ein resultierendes Drehmoment ausübt. Der zugehörige
Wert, der dem im Balken transportierten Drehimpulsstrom entspricht,
kann durch Summation über alle Teilbeträge berechnet werden. Dazu ist
jedem infinitesimal kleinen Flächenstück dA ein eigendes Drehmoment
bezüglich der neutralen Faser zuzuordnen.
dM = dF × r
dF = σ ⋅ dA
(9.10)
Spannungszustand und Vorzeichen
Bei vor- oder rückwärts fliessenden Impulsströmen nennt man die Komponenten der Impulsstromdichten Zug- oder Druckspannung und weist
ihnen das Formelzeichen σ zu. Leider entspricht die gängige Vorzeichenwahl nicht der natürlichen Konvention. Fliesst zum Beispiel Impuls
gegen die Bezugsrichtung, versieht man die zugehörige Zugspannung
mit einem positiven Vorzeichen. Mit Formel (9.10) sind beide Vorzeichenkonventionen erfüllbar. Man muss nur die Orientierung des Flächenelementes dA der Abmachung entsprechend wählen.
Gerade Biegung
Steht die Bezugsrichtung des im Balken drin transportierten Drehimpulses normal zu einer Symmetrieachse der Querschnittfläche, nennt man
die Biegung gerade. Bei gerader Biegung kann mit Hilfe der Formel
(9.10) ein formal einfacher Zusammenhang zwischen den Impulsstromdichten, der Spannungsverteilung, und dem Drehimpulsstrom (Biegemoment) hergestellt werden. Das Koordinatensystem, dessen Ursprung
in den Schnittpunkt der Symmetrieachse mit der Linie der neutralen Fasern gelegt wird, zeige weiterhin mit der x-Achse in Richtung der beiden Transporte, die y-Achse verlaufe längs der Symmetrieachse und die
z-Achse weise in Bezugsrichtung des zu transportierenden Drehimpulses. Dank der Symmetrie darf der ganze Querschnitt in dünne Streifen
dy
z
y
Rotationsmechanik
Seite 181
zerlegt werden, die alle parallel zur z-Achse verlaufen. Jeder Streifen
liefert dann einen Beitrag zum Drehimpulstransport. Der entsprechende
Wert ist gleich dem Produkt aus der Stärke des hindurchfliessenden Impulsstromes und dem Abstand des Streifens von der neutralen Faser.
Setzt man diesen Zusammenhang in die Formel (9.10) ein und integriert
über y, erhält man einen Zusammenhang zwischen dem Biegemoment
und der Spannungsverteilung.
Mz = I Lz = ∫ σ ⋅ z ⋅ y ⋅ dy
I px = ∫ σ ⋅ z ⋅ dy = 0
(9.11)
Das zweite Integral in (9.11) soll uns daran erinnern, dass bei der reinen
Biegung der x-Impuls im Kreis herumfliesst und seine Stromstärke bezüglich des vollen Querschnittes verschwindet.
Die beiden Integrale in (9.11) verknüpfen die Impulsstromdichte mit lineares Materialverhalten
dem Impuls- bzw. dem Drehimpulsstrom. Ohne detailierte Kenntnisse
des Spannungs-Dehnungsverhaltens kann auch bei gegebenem Biegemoment nicht gesagt werden, wo die Belastungsspitzen auftreten und
wie stark sie sein werden. Besteht der Balken zum Beispiel aus einem
zähen Metall und überschreitet die Belastung an keiner Stelle des Querschnitts den kritischen Wert, darf voraussetzen werden, dass die Spannung linear mit dem Betrag der y-Koordinate zu- oder abnimmt. Damit
wird die Spannung σ zu einer linearen Funktion in y. Im Falle eines linearen Materialverhaltens dürfen wir für die Spannung c·y schreiben,
wobei die Konstante c von der jeweiligen Belastung abhängig ist.
Mz = I Lz = c ⋅ ∫ z ⋅ y 2 ⋅ dy
I px = c ⋅ ∫ z ⋅ y ⋅ dy = 0
(9.12)
y
Die beiden Integrale in (9.12) enthalten nur noch rein geometrische
Grössen. Damit hängt ihr Wert lediglich noch von derkonkreten Gestalt
des Querschnittes ab. Das erste Integral heisst Flächenmoment 2. Ordnung. Der Name weist auf die mathematischen Ähnlichkeit mit dem
Massenträgheitsmoment hin. Der zweite Ausdruck in (9.12) verlangt,
dass der Ursprung des Koordinatensystems in den Flächenschwerpunkt
gelegt werden muss, d.h. die neutrale Faser, die auf der Symmetrieachse
des Querschnittes liegt, durchstösst den Flächenschwerpunkt.
Die bei einer Biegung auftretenden Zug- oder Druckspannungen errei- Flächenmoment 2. Ordnung
chen um so grössere Werte, je weiter sich die fragliche Stelle von der
neutralen Faser entfernt befindet. Bei linearem Materialverhalten, wenn
also die Spannung proportional mit dem Abstand von der neutralen Faser zunimmt, kann das Biegemoment durch nur zwei Einflussgrössen,
der maximal auftretenden Spannung und der Geometrie der Querschnittfläche, berechnet werden. Dabei geht die Gestalt der Schnittfläche immer als achsiales Flächenmoment 2. Ordnung in die Berechnung
ein. Umgekehrt kann bei bekanntem Flächenträgheitsmoment die maximale Zug- oder Druckspannungen direkt aus dem Biegemoment ermittelt werden. Die Flächenträgheitsmomente der häufigsten Querschnitte
findet man in vielen Lehr- und Handbüchern tabelliert. Ein Ingenieur
z
Seite 182
Rotationsmechanik
steht also kaum je vor dem Problem, ein Flächenträgheitsmoment selber
berechnen zu müssen. Entweder ist Integration einfach auszuführen,
dann findet er die Lösung in einem Buch, oder das Integral ist in keinem
Tabellenwerk vorhanden, dann dürfte die Auswertung kaum gelingen.
Trotzdem soll man sich nicht nur darauf beschränken, bloss Formeln anwenden zu wollen. Oft lassen sich komplizierte Problemstellungen auf
zwei oder drei einfache reduzieren. Eine solche Reduktion kann jedoch
nur vornehmen, wer den Zusammenhang prinzipiell und nicht nur formelmässig verstanden hat.
Beispiel 41: Ein T-Träger soll einen Drehimpulsstrom der Stärke M weiterleiten. Der Träger wird von einem Gurt der
Breite b und einem gleich grossen Steg gebildet. Die Dicke d von Gurt und Steg sind klein im Vergleich
zur Kantenlänge b. Zudem steht die Bezugsrichtung des zu transportierenden Drehimpulses normal zur
Symmetrieachse des Trägerquerschnittes. Welche Werte nehmen die Impulsstromdichten an der Unterund an der Oberseite des Trägers an?
Lösung 41:
Der Flächenschwerpunkt liegt auf der Symmetrieachse und teilt die Steghöhe im Verhältnis 1:3. Weil wir
die Blechdicke der beiden Teile vernachlässigen, läuft die Integration nur über die Steghöhe. Der Gurt liefert einen additiven Beitrag, der gleich dem Produkt aus seinem Querschnitt und dem Quadrat des Schwerpunktabstandes ist.
b/4
Mz = c ⋅
∫
d ⋅ y 2 ⋅ dy + c ⋅ d ⋅
−3 b / 4
b3
5
=
⋅ c ⋅ d ⋅ b3
16 24
Diese Gleichung lässt sich nach dem Proportionalitätsfaktor c aufösen. Für die maximale Spannung an der
oberen Kante kann den Wert c·b/4 und für die untere Kante des Trägers c·b·(3/4) eingesetzt werden. Damit
erhält man für die beiden Zugspannungen
σ oben =
6 ⋅ Mz
5 ⋅ d ⋅ b2
σ unten = 3 ⋅ σ oben =
18 ⋅ Mz
5 ⋅ d ⋅ b2
Versuchen Sie das Problem nochmals zu lösen, indem Sie für den Steg eine andere Höhe einsetzen.
homogen
parabelförmig
homogen
Drehimpulstransport im Doppel-T-Träger
Ergänzt man den einfachen T-Träger mit einem zweiten Gurt zu einem
Doppel-T-Balken, verschiebt sich der Flächenschwerpunkt in die Mitte
des Steges. Die Auswertung des Integrals (9.12) und die anschliessende
Umrechnung in die maximale Zug- oder Druckspannung liefert einen
Wert (Übungsaufgabe), der deutlich kleiner ist als beim gewähnlichen TTräger. Zudem wird ersichtlich, dass die weiter oben gemachte Annahme, wonach nur die Gurten zum Drehimpulstransport beitragen, nicht
exakt zutrifft. Der Steg, in dem ja auch Zug- und Druckspannung
herrscht, verstärkt den Drehimpulstransport je nach Abmessungen des
Trägers um ein paar Prozent. Funktional gesehen setzt sich ein DoppelT-Träger aus zwei Gurten, die für den Hauptteil des Drehimpulstransportes verantwortlich sind, und einem Steg zusammen, der den Drehimpulstransport wie ein schmaler Balken verstärkt. Weil die Impulsstromdichte (Zug- oder Druckspannung) gemäss unseren Annahmen
proportional mit dem Abstand zur neutralen Fasern anwächst, bildet die
Drehimpulsstromdichte im ganzen materiellen Querschnitt eine parabelförmige Verteilung. Ausserhalb des Stegs ist der Drehimpulsstrom homogen und die zugehörige Stromdichte ist gleich gross wie auf der
Schnittfläche zwischen Gurt und Steg.
Rotationsmechanik
Seite 183
Ein auf Biegung belasteter T-Träger werde durch die Mitte des Steges in schiefe Biegung
zwei symmetrische Teile zersägt. Infolge der Belastung weichen die beiden Hälften des Gurtes mit den Aussenkanten nach unten weg und geben dabei oben bei der Schnittstelle eine Öffnung frei. Das Trennverfahren zeigt, dass der Zusammenhang zwischen Drehimpulstransport
und Materialreaktion komplizierter wird, sobald die Bezugsrichtung des
durch den Träger fliessenden Drehimpulses nicht normal zu einer Symmetrieachse des Querschnitts steht. Schiefe Biegung nennt der Statiker
diesen Belastungsfall. Rein mathematisch lässt sich die schiefe Biegung
ebenfalls mit dem Ansatz von Formel (9.10) behandeln. Wiederum ergibt die Summe über alle Teildrehmomente das totale Biegemoment.
Einzig die Richtung, in welche die Zug- und die Druckspannung linear
ansteigt, steht bei der schiefen Biegung nicht mehr normal zur Bezugsrichtung des Drehimpulses. Infolge dieser geometrischen Komplikation
erweist sich die Auswertung der zugehörigen Integration als etwas komplizierter als im symmetrischen Fall. Ich verzichte hier aber auf eine
weitere Diskussion der schiefen Biegung und verweise auf die Fachliteratur.
? Kontrollfragen
12.) Wie kann ein Drehimpulstransport nachgewiesen werden?
13.) Wie hängt ein Drehimpulstransport, der seitwärts zur Bezugsrichtung verläuft, mit den begleitenden Impulsströmen zusammen?
14.) Ein Hohlprofil mit quadratischem Querschnitt wird auf Biegung beansprucht. Wie ist der
Drehimpulsstrom verteilt?
9.4 Impuls- und Drehimpulsströme bei der Torsion
Biegung und Torsion bilden zwei komplementäre Belastungsfälle. Bei Begleit- und Wirbelströme
der Biegung wird der Drehimpuls seitwärts transportiert und die begleitenden Impulsströme fliessen entweder vor- oder rückwärts. Torsion tritt
auf, sobald Drehimpuls in seine eigene Bezugsrichtung durch einen fex
sten Körper strömt. Dann hüllen Impulsströme, die seitwärts fliessen,
den durch die tordierte Welle wandernde Drehimpuls vollständig ein. Im
x
Kapitel 2 haben wir uns ein erstes Mal mit diesem Transportphänom bey
y
fasst und gesehen, dass der ganze Drehimpulsstrom von einer kompaky
ten Hülle aus seitwärts fliessenden Impulsströmen umgeben sein muss.
x
Infolge eines allgemeinen Symmetrieprinzips darf die eine Sorte Impuls
jedoch nur dann in die Richtung einer andern transportiert werden,
wenn an derselben Stelle die andere Sorte mit gleicher Stärke in die Bezugsrichtung der ersten fliesst. Diese Regel bewirkt, dass bei der Torsion
neben den Impulsströmen, die den Drehimpulstransport begleiten, auch
noch Wirbelströme auftreten, die normal zur Transportrichtung fliessen.
Der Impuls, der den Drehimpuls bei der Torsion begleitet, fliesst genau die lokale Verknüpfung
senkrecht zu seiner Definitionsrichtung. Damit gehören Drehimpuls und
Impuls verschiedenen Sorten an. Fliesst also zum Beispiel z-Drehimpuls
Seite 184
Rotationsmechanik
s
durch eine in z-Richtung orientierte Welle, wird dieser Transport von einem Impulsstrom begrenzt, welcher der x- oder der y-Sorte angehört
und entweder mit oder gegen die z-Richtung fliesst. Infolge der oben erwähnten allgemeinen Regel über die zugeordneten Schubspannungen
muss in jedem Querschnitt auch noch ein Wirbelstrom vorhanden sein,
der den Drehimpulstransport vollständig umfliesst. Rein Qualitativ haben wir uns schon in Kapitel 2 mit diesem Schubfluss beschäftigt. Hier
geht es nun darum, den Schubfluss-Drehimpuls-Zusammenhang auch
noch quantitativ zu fassen. Das zugehörige Gesetz, das aus einer allgemeinen Drehimpuls-Impuls-Verknüpfungen abgeleitet werden kann, besagt, dass der Drehimpuls überall dort seine Stromstärke ändert, wo ein
Schubfluss vorhanden ist.
djLz = 2 ⋅ j pz ⋅ ds
Formel (9.13) verknüpft die Dichte des seitwärts im Querschnitt herumfliessenden Impulsstromes mit der Dichte des in Richtung der tortierten
Welle zu transportierenden Drehimpulsstromes. Das Linienelement ds
steht normal zum Vektor der Impulsstromdichte jpz. Die vollständige
Verknüpfung von Drehimpuls- und Impulsstromdichte ist viel komplexer als Formel (9.13). Eine umfassende Beschreibung dieser Fundamentalbeziehung würde den Rahmen des vorliegenden Lehrbuches
sprengen. Hier soll nur dargelegt werden, wieso der vollständige Zusammenhang nicht mit der Vektorrechnung abgehandelt werden kann.
Ein Transporte ist vollständig bekannt, wenn an jedem Ort und zu jeder
Zeit eine Stromdichte gegeben ist. Jede Stromdichte beschreibt, wieviel
von einer bestimmten Menge pro Sekunde und pro Quadratmeter an einem ausgewählten Punkt in eine vorgegebene Richtung transportiert
wird. Die einfachste Stromdichte, die als Begriff nicht weiter hinterfragt
werden muss, findet man in der Hydraulik. Die dort auftretende Volumenstromdichte, die angibt, wieviel Volumen pro Zeit und pro Fläche an
einem Punkt vorbeifliessen, ist uns als Strömungsgeschwindigkeit bestens bekannt.
Stromdichten
j pxx
j
pxy
j pxz
vx
v
y
vz
Tensoren
j pxx
j
pyx
j pzx
j pxy
j pyx
j pzx
(9.13)
j pxy
j pyx
j pzx
Erläuterung der lokalen Beziehung
Alle Stromdichten, die den Transport einer skalaren Menge wie Masse,
Ladung oder Entropie lokal beschreiben, verhalten sich geometrisch
analog zur Strömungsgeschwindigkeit, d.h. sie sind zu jedem Zeitpunkt
und an jedem Ort als Vektoren darstellbar. Bei mengenartigen Grössen,
die selber schon Vektoreneigenschaft besitzen, verhalten sich die zugehörigen Stromdichten wie ein totales oder äusseres Produkt zweier Vektoren. Solche „zweifachen Vektoren“ nennt man Tensoren, weil diese
mathematischen Objekte ein erstes Mal beim Spannungszustand oder
eben bei der Impulsstromdichte untersucht worden sind. Sobald ein Koordinatensystems fest vorgegeben ist, nehmen Tensoren die Form einer
Matrize an. Dreht man das Koordinatensystem um eine bestimmte Achse, gehen die Tensorkomponenten auf kompliziertere Art und Weise ineinander über, als diesVektorkomponenten tun würden.
Eine Formulierung, die zwei Transporte lokal miteinander verknüpft,
kommt nicht ohne den Begriff der Stromdichte aus. Für die Mechanik
bedeutet dies, dass die allgemeine Drehimpuls-Impuls-Beziehung nur
Rotationsmechanik
Seite 185
mit Hilfe der Tensoranalysis formuliert werden kann. Der Ausdruck in
(9.13), der die Änderung einer Komponente der Drehimpulssstromdichte in Abhängigkeit von einer skalar hingeschriebenen Impulsstromdichte
beschreibt, enthält also nur einen der vielen Terme, die notwendig sind,
um den Drehimpulstransport vollständig mit dem Impulsstrom zu verknüpfen. Zudem habe ich die Schreibweise vereinfacht. Der Index z
weist nur auf die transportierte Sorte hin. Die Transportrichtung selber,
die üblicherweise mit einem zweiten Index angegeben wird, muss aus
einer Skizze entnommen werden. Formel (9.13) setzt voraus, dass der zDrehimpuls in z-Richtung fliesst und der z-Impuls in der x-y-Ebene drin
einen Wirbel bildet. Das Linienelement ds muss, damit die Formel exakt
gilt, normal zur Impuls- und zur Drehimpulsstromrichtung gemessen
werden. Impuls- und Drehimpulsstrom bilden eine Rechtsschraube, d.h.
wenn man mit dem Daumen der rechten Hand in die Richtung des Drehimpulstransportes zeigt, geben die andern Finger den Wirbelsinn des
Impulsstromes an.
Beispiel 42: Ein dünnwandiger Hohlzylinder (Radius r, Wandstärke d) werde auf Torsion beansprucht. Das zu übertragende Drehmoment oder die Stärke des hindurchfliessenden Drehimpulsstromes sei bekannt und habe den
Wert M. Wie gross sind die Schubspannungen, die bei dieser Belastung im materiellen Querschnitt des
Rohres auftreten?
Lösung 42:
Weil die Wandstärke des Hohlzylinders klein ist, dürfen wir von einer konstanten Schubspannung τ ausgehen. Die Drehimpulsstromdichte hat dann im Innern des Rohres gemäss Formel (9.13) den konstanten
Wert 2·τ·d. Multipliziert man diesen Wert mit der offenen Querschnittfläche des Rohres, erhält man das
Drehmoment M. Aufgelöst nach der Schubspannung ergibt dies τ = M/(2·π·d·r2).
Beispiel 43: Ein homogener Vollzylinder (Radius R) werde auf Torsion beansprucht. Wieder soll ein Drehimpulsstrom
der Stärke M hindurchfliessen. Wie gross sind die grössten Schubspannungen, die bei dieser Belastung auftreten können?
Lösung 43:
Setzt man für den ganzen Querschnitt ein lineares Materialverhalten voraus, wächst die Schubspannung
oder die Stromdichte des Schubflusses von der Symmetrieachse her stetig gegen aussen an. Weil der Drehimpuls nur innerhalb des Zylinderquerschnitts transportiert wird, ergib Formel (9.13) eine Stromdichteverteilung, die auf der Symmetrieachse ein Maximum hat und gegen aussen mit zunehmender Stärke auf Null
absinkt. Zur mathematisch exakten Lösung schreibt man die Schubspannung als homogene, lineare Funktion des Radius hin, setzt diese Beziehung in (9.13) ein und integriert einmal längs des Radius von der
Mitte bis zur gewünschten Position. Der Wert auf der Achse ist so zu wählen, dass die Drehimpulsstromdichte beim Zylindermantel verschwindet.
r
r
0
0
jLz (r ) = jLz 0 − ∫ 2 ⋅ j pz ⋅ drƒ = jLz 0 − ∫ 2 ⋅ a ⋅ rƒ ⋅ drƒ = a ⋅ ( R2 − r 2 )
Multipliziert man die Drehimpulsstromdichte mit der Fläche eines Kreisringes der Breite dr und integriert
nochmals längs eines Radius von der Mitte bis zum Mantel, erhält man die ganze Drehimpulsstromstärke
M.
a ⋅ π ⋅ R4
M = ∫ jLz (r ) ⋅ 2 ⋅ π ⋅ r ⋅ dr =
2
0
R
τ max = a ⋅ R =
2⋅M
π ⋅ R3
Bei gegebener Schubspannungsgrenze nimmt der Maximalwert der Drehimpulsstromstärke mit der dritten
Potenz des Radius zu. Verdoppelt man zum Beispiel den Durchmesser einer Welle, so darf achtmal mehr
Seite 186
Rotationsmechanik
Drehimpuls hindurchfliessen, bis die gleiche Schubspannung erreicht wird wie vorher.
lokale und nichtlokale Verknüpfungen
nichtlokal:
Impulstromdichte
Hebelgesetz
Integration über Fläche
lokal:
Impulsstromdichte
Drehimpulsstromdichte
Integration über Fläche
Schubfluss und Höhenlinien
Die Spannungsverteilung im verdrehten Vollzylinder haben wir im Kapitel 2 schon einmal angeschaut. Ersetzt man in der Formel (2.3) den
Faktor (G·∆ϕ/l) durch a, folgt der gleiche Ausdruck wie in Beispiel 41.
Dass ich hier im Gegensatz zum zweiten Kapitel das Formelzeichen M
für die Drehimpulsstromstärke verwende, ist eine kleine Konzession an
den üblichen Sprachgebrauch und tut nichts zur Sache. Die Herleitung
von Formel (2.3) unterscheidet sich jedoch grundlegend von der Lösung
im Beispiel 41. Bei der ersten Diskussion des tordierten Stabes ist der
Schubspannung über das Hebelgesetz ein Drehmoment zugeordnet worden. Dieses Teildrehmoment liess sich nachher über den ganzen Querschnitt aufsummieren. Oben, bei der zweiten Herleitung, habe ich aus
den Randbedingungen und einer Hypothese über das Materialverhalten
eine Verteilungsfunktion für die Drehimpulsstromdichte konstruiert.
Daraus liess sich die zugehörgie Stromstärke berechnen, indem wir die
Stromdichte über die Referenzfläche aufintegriert haben. Im letzten Abschnitt, als die Normalspannungsverteilung bei der gerader Biegung zu
berechnen war, bin ich umgekehrten Weg gegangen. Die Zug- und
Druckspannungen im einfachen und im Doppel-T-Balken liessen sich
noch mit Hilfe der halblokalen Verknüpfungen (9.8) und (9.9) bestimmen. Doch als beim nächsten Beispiel der Querschnitt des belasteten
Trägers nur noch eine Symmetrieachse aufwies, musste ich zur alten
Methode mit dem Hebelgesetz zurückgreifen.
Trotz ihrer komplexen Struktur enthält die lokale Beschreibung Bilder,
die das physikalische Verständnis der Transportvorgänge bei Torsion
enorm erleichtern. Die Methode funktioniert jedoch nur, falls man ein
wirkliches Bild aufbaut und sich nicht etwa nur den Formalismus aneignet. Den ersten Teil der Geschichte kennen wir schon: Drehimpuls wird
in seine eigene Bezugsrichtung transportiert, falls der zugehörige Strom
überall von einem Impulswirbel umflossen wird. Wohl kann sich dieser
querfliessende Impulsstrom verzweigen, doch darf er nirgends verschwinden oder neu auftauchen. Ein Impulsstrom in einem statisch belasteten Bauteil weist nie Quellen oder Senken auf. Aus Formel (9.13)
geht nun hervor, dass sich die Drehimpulsstromdichte überall dort ändert, wo ihm ein seitwärts fliessender Impulsstrom in die Quere kommt.
Stellt man nun den Impulsstrom durch Stromlinien dar, markieren diese
gleichzeitig die Flanken, an denen die Stärke des Drehimpulsstromes
ansteigt oder abfällt. Die Impulsstromlinien dürfen damit als Höhenlinien angesehen werden, die angeben, wie gross die Drehimpulsdichte an
der jeweiligen Stelle ist. Der Drehimpulsstrom ändert also immer nur an
den Stellen seine Dichte, an denen ein Impulsstrom normal zu seiner
Transportrichtung querfliesst. In den Hohlräumen des tortierten Stabes,
dort wo keine Schubspannungen auftreten können, bleibt die Dichte des
Drehimpulsstromes konstant. Durch nichtmaterielle Querschnitte fliessen also bestenfalls homogene Drehimpulsströme.
Rotationsmechanik
Seite 187
jLz
Fig. 9. - 3: Die Skizze links zeigt die Stromlinien des in einem verdrehten Stab mit rechteckigem Querschnitt
querfliessenden Impulsstromes. Rechts ist die Dichte des längs der Stabachse beförderten Drehimpulsstromes in
Funktion der grösseren Symmetrieachse des Querschnittes aufgetragen. Die Drehimpulsstromdichteverteilung
kann man sich immer als Gebirge vorstellen. Die Stromlinien des querfliessenden Impulses bilden dann die
Höhenlinien.
Durch Integration der Drehimpulsstromdichte über den Querschnitt des das Volumen als Drehimpulstordierten Stabes erhält man die totale Stromstärke. Übersetzt ins Bild stromstärke
mit dem Hügel und den Höhenlinien bedeutet dies, dass das Volumen
des Hügels gerade das auf eine Fläche einwirkende Drehmoment darstellt. Ist die Stromdichteverteilung des Impulswirbels für einen bestimmten Profilquerschnitt bekannt, kann mit Hilfe von (9. 13) die
zugehörige Drehimpulsstromdichte ermittelt und graphisch als Gebirge
über der Geometrie des Querschnittes gezeichnet werden. Das zugehörige Volumen ist dann proportional zur totalen Stromstärke des hindurchfliessenden Drehimpulses.
Die Drehimpuls-Impulsstromverknüpfung basiert auf einer Aussage, Materialgesetze und Methode
wonach die Dichte des querfliessenden Impulsstromes die Änderung der der finiten Elemente
Drehimpulsstromdichte festlegt. Zudem darf ausserhalb des verdrehten
Stabes die Drehimpulsstromdichte gleich Null gesetzt werden. Vom Impuls aus gesehen wächst die Drehimpulsstromdichte immer von links
nach rechts an, d.h. der querfliessende Impulsstromwirbel und der Drehimpulsstrom bilden, wie weiter oben schon einmal erwähnt, eine
Rechtsschraube. Die genaue Stromdichteverteilung innerhalb des Impulswirbels kann berechnet werden, sobald man weiss, wie das durchflossene Material auf die Belastung reagiert. Bei Metallen und bei nicht
allzuhoher Belastung darf angenommen werden, dass sich das Material
proportional mit derSchubspannung verformt. Unter diesen Umständen
ist die zugehörige Differentialgleichung linear und für geometrisch einfache Randbedingungen geschlossen lösbar. Mit der Methode der finiten
Elemente, lassen sich die Schubspannungen auch bei beliebigen Querschnittsflächen und sogar bei nichtlinearer Materialreaktion recht genau
brechnen.
Bei dünnwandigen Profilen sind die querfliessenden Impulsströme fast dünnwandige Profile
homogen und die Materialgesetze spielen nur noch eine untergeordnete
Rolle. Das Verhältnis zwischen der Drehimpulsstromstärke oder dem totalen Drehmoment und den auftretenden Schubspannungen hängt dann
nur noch von der Geometrie des Querschnitts ab.
Seite 188
Rotationsmechanik
Beispiel 44: Auf ein Hohlprofil mit quadratischem Querschnitt (Seitenlänge 22 mm, Wandstärke 2 mm) wirkt axial ein
Drehmoment von 4 Nm ein. Man schätze die Scherspannunen ab, die in den Querschnittflächen drin auftreten.
Lösung 44:
Vereinfachend darf angenommen werden, dass der ganze Drehimpulstransport als homogener Strom durch
eine Fläche von 4 cm2 hindurchtritt. Die zugehörige Stromdichte beträgt demnach 10’000 N/m. Diese
Stromdichte wird von einem querfliessenden Impulsstrom aufgebaut, der nur 2 mm breit ist. Für die zugehörige Stromdichte liefert Formel (9. 13) einen Wert 2.5 MPa oder 250 N/mm2.
Der mit dieser Abschätzung ermittelte Wert dürfte auf den grössten Teil des materiellen Querschnittes in
etwa zutreffen. Nur bei den Kanten, dort wo der Impuls um eine enge Kurve fliessen muss, könnte es zu
namhaften Abweichungen kommen.
der Schubfluss als physikalische Grösse
Die Stärke des querfliessender Impulsstrom kann mit mit dem Begriff
Schubfluss umschrieben werden. Der Schubfluss misst den im Kreis herumfliessenden Impuls pro Profillänge. Man erhält den Schubfluss durch
Integration der Schubspannung über die ganze Breite eines einzelnen
Impulsstromzweiges. Der Schubfluss als Grösse ist demnach gleich der
Hälfte der Änderung der Drehimpulsstromdichte zwischen den beiden
„Ufern“ des zugehörigen Impulsstromarmes.
Schubflussumkehr
Der Querschnitt eines Profilstabes bietet dem Impulsstrom oft keine geschlossene Rundstrecke. Dann muss der durch die Torsion induzierte
Impulsstrom einzelne Streckenabschnitte zweimal durchfliessen. An
solchen Stellen schrumpft die vom Impulswirbel umflossene Fläche
stark zusammen. Entsprechend klein wird dann der zugehörige Wert des
Drehimpulsstromes. Entfernt man zum Beispiel bei einem Hohlprofil
mit quadratischem Querschnitt die eine Seitenfläche, kann der Impuls
nur noch im verbleibenden U herumfliessen. Ein U-Profils vermag deshalb nur vergleichsweise wenig Drehimpuls in Bezugsrichtung transportieren. Eine ähnliche Verminderung der Torsionssteiffigkeit tritt auch bei
einer runden Hohlwelle auf, sobald man diese längs einer Mantellinie
aufschlitzt.
jLz
Fig. 9. - 4: Der Schlitz in einem auf Torsion belasteten Rohr zwingt den Impulsstrom zur Umkehr. Er umfliesst
deshalb eine wesentlich kleinere Fläche als beim intakten Rohr. Entsprechen klein wird denn auch der „Drehimpulsstromdichtehügel“. Die Skizze ganz rechts zeigt die Drehimpulsstromdichteverteilung über einem beliebigen
Durchmesser für die beiden Belastungsfälle.
Rotationsmechanik
Seite 189
? Kontrollfragen
15.)
16.)
17.)
18.)
19.)
Wie fliesst der Drehimpuls bei Biege- und bei Torsionsbelastung durch das belastete Bauteil
hindurch?
Wie fliessen die begleitenden Impulsströme bei Biegung? Wie bei Torsion?
Formulieren Sie die Drehimpuls-Impulsstromdichte-Verknüpfung bei der Torsion mit Ihren
eigenen Worten!
Welche Einheit hat der Schubfluss als physikalische Grösse?
Wie hängt der Schubfluss mit der Drehimpulsstromdichte zusammen?
9.5 Zur Statik des starren Körpers
Jeder starre Körper vermag Impuls und Drehimpuls zu speichern. Wird Aufgabe der Statik
ein Objekt festgehalten, fliessen beide Mengen verzögerungsfrei hindurch. Der Statik kommt nun die Aufgabe zu, die zugehörigen Kräfte
und Drehmomente zu identifizieren, d.h. die Statik beschreibt, wieviel
Impuls und wieviel Drehimpuls das System über die verschiedenen Kanäle mit der Umgebung austauscht. In der Statik untersucht man jedoch
nicht, wie der Impuls durch den Körper hindurchfliesst. Solche Fragestellungen sind Gegenstand der Festigkeitslehre. Weil ein System Drehimpuls auch über unbelastete Oberflächenstücke abgeben oder
aufnehmen kann, bietet die korrekte Darstellung aller Drehmomentmacht einige Schwierigkeiten. Dies erfordert oft ein systematisches, rezeptartiges Vorgehen.
In einem ersten Schritt grenzt man das zu untersuchende Objekt gegen Schnittprinzip
die Umgebung ab und identifiziert alle Kräfte und Drehmomente. Da
sämtliche sechs skalaren Mengen der Mechanik durch ein einziges
Oberflächenstück ein- oder austreten können, wirkt im allgemeinen Fall
auf eine einzige Schnittfläche eine beliebig gerichtete Kraft und ein davon unabhängiges Drehmoment ein. Neben den Oberflächenkräften
muss die Gewichtskraft gesondert berücksichtigt werden. Diese Kraft
berechnet sich immer durch das Produkt aus der Masse des Systems und
der lokal messbaren Gravitationsfeldstärke. Am besten zeichnet man
den ausgewählten Körper als separate Skizze und markiert alle Einwirkungen (Kräfte und Drehmomente) mit je einem Pfeil. Die GesamtwirFG
kung der Gewichtskraft wird mit einem einzigen Vektor dargestellt,
dessen Wirklinie den Schwerpunkt enthält. In der ebenen Darstellung
ersetzt man mit Vorteil den Drehmomentenvektor durch einen gebogenen Pfeil, dessen Spitze in Wirkrichtung weist. Grössen, die durch die
Aufgabenstellung bekannt sind, müssen korrekt, also mit Angabe des
Betrages und der Richtung angegeben werden. Alle nichtspezifizierten
Einwirkungen dürfen mit einem frei gewählten Pfeil markiert werden.
Die zugehörigen Werte gehen dann als Unbekannte in die Gleichgewichtsbetrachtung ein.
Ein System heisst statisch bestimmt, wenn jeder Freiheitsgrad durch statisch bestimmt
eine eindeutig identifizierbare Bedingung eingefroren worden ist. Da an
einer einzigen Befestigungsstelle bis zu sechs Freiheitsgrade eliminiert
FW
MW
Seite 190
Rotationsmechanik
werden können, ist ein einseitig eingemauerter Balken schon vollständig
fixiert; er lässt sich durch keine Einwirkung mehr Bewegen. Wird der
fest eingespannte Balken am andern Ende zusätzlich gestützt, kann im
Belastungsfall nicht mehr gesagt werden, an welcher Stelle welche
Kräfte und Drehmomente einwirken. Der zweiseitig eingemauerte Balken ist demnach statisch überbestimmt.
eingefrorene Freiheitsgrade
Kugel
einwertige Lagerung
statisches Drehmoment
P
+
s
F
r
r r
M= F ×s
zur Lösungsstrategie
Die Art, wie der Körper an einer bestimmten Stelle festgehalten wird,
entscheidet darüber, wieviele Freiheitsgrade dort „eingefroren“ werden.
Eine ebene Fläche kann bis zu drei Freiheitsgrade einschränken, wobei
die Tangentialkräfte in ihrem Betrag durch die Haftreibungsbedingung
beschränkt sind. Man könnte nun eine Tabelle mit allen möglichen Befestigungsarten erstellen und jedesmal angeben, wieviele Freiheitsgrade
damit eingefroren werden. Ich verzichte hier auf eine vollständige Diskussion der möglichen Fälle. In einer konkreten Situation wird mit etwas Erfahrung und gründlichem Überlegen recht schnell klar, mit
welchen Kräfte und Drehmomenten welche Bewegungsmöglichkeiten
eingeschränkt werden. Beim Freischneiden sollte man sich aber jedesmal vergewissern, wie die entsprechende Kraft im allgemeinsten Fall
gerichtet sein könnte und ob eventuell zusätzlich ein reines Drehmoment auftritt.
Drehmomente, die in Begleitung einer Kraft auf einen starren Körper
einwirken, haben wir in Kapitel 2 schon untersucht. Dabei haben Sie gelernt, dass sich jedes dieser Drehmomente als Produkt aus dem Betrag
der Kraft und dem Abstand der Wirklinie vom Massenmittelpunkt berechnen lässt. Die Massenmitte ist der Ort, von dem alle Impulsströme
im Mittel wegfliessen oder auf den sie zuströmen. Deshalb zeichnet das
Trägheitszentrum den Punkt aus, auf den die Drehmomente der Einzelkräfte zu beziehen sind. In der Statik verliert nun der Massenmittelpunkt
seine dynamische Bedeutung. Einzig bei der Reduktion der Gravititationswirkung auf eine Einzelkraft spielt er als Schwerpunkt noch eine gewisse Rolle. Das statische Drehmoment kennt keine geometrischen Einschränkungen: beim ruhenden Körper darf ein beliebiger Punkt ausgewählt und alle Drehmomente auf diesen Ort bezogen werden. Dies
funktioniert, weil der festgehaltene Körper selber weder Impuls noch
Drehimpuls zu speichern vermag, weil alle beteiligten Mengen nur noch
durch das System hindurchfliessen. Eine weitere Begründung liefert die
Rotatormechanik (Kapitel 8). Der ruhende Körper kann theoretisch um
jede beliebige Achse in Rotation versetzt werden. Unter diesem Gesichtspunkt muss das Drehmoment der einwirkenden Kräfte auf die Rotationsachse bezogen werden. Weil aber durch jeden ausgewählten
Punkt immer ein ganzes Bündel von frei wählbaren Drehachsen läuft,
sind die Drehmomente aller Kräfte auf diesen einen Punkt zu beziehen.
Gleichgewicht wird so zu einem Spezialfall von mehreren möglichen
Rotatorbewegungen.
Probleme aus der Statik löst man am sichersten mit einer eindeutigen
Strategie. Dazu eignet man sich ein gut strukturiertes Rezept an. Zuerst
wählt man den zu untersuchenden Körper aus und überlegt sich genau,
Rotationsmechanik
Seite 191
was dazu gehört und was man weglassen möchte. Dann schneidet man
das ausgewählte System frei, d.h. man bestückt jede Kontaktfläche mit
höchstens einem Kraft- und einem Drehmomentenvektor. Vorgegebene
Werte sind korrekt anzugeben, unbestimmten Grössen weist man eine
willkürlich gewählte Bezugsrichtung zu. Als nächstes entscheidet man
sich für einen geeigneten Punkt und setzt dort den Ursprung des Koordinatensystems hin. Bezugspunkt und Richtung der Koordinatenachsen
sind so zu wählen, dass der Rechenaufwand minimal wird. In einem
weiteren Schritt formuliert man dann die sechs Gleichgewichtsbedingungen. Enthält das Gleichungssystem genau sechs unbekannte Grössen, besitzt es in der Regel eine eindeutige Lösung. Am Anfang wende
man dieses Lösungsschema auf ebene Problemstellungen an. Obwohl
mit dieser Einschränkung pro System nur drei Gleichungen aufgestellt
und gelöst werden müssen, können schon recht komplexe Problemstellungen auftreten.
Beispiel 45: Der nebenstehend skizzierte Balken (Masse 15 kg,
Länge 2.4 m) wird mit einer Kraft von 250 N belastet.
Die Wirkungslinie der Kraft steht 30˚schief zur Vertikalen. Das linke Lager kann horizontale und vertikale
Kräfte aufnehmen. Das rechte Lager kann nur vertikal
belastet werden. Beide Lager sind symmetrisch zum
Balken angeordnet und ihr gegeseitiger Abstand
beträgt 1.6 m. Wie gross sind die Lagerkräfte?
Lösung 45:
30˚
1600
F
15 kg
Zuerst schneiden wir den Balken frei, d.h. wir zeichnen alle Kräfte ein, die auf das System einwirken.
y
Dann führen wir ein Koordinatensystem ein, dessen
F
Ursprung bei der linken Stützstelle liegt. Mit dieser
Wahl sorgen wir dafür, dass der Lagerkraft links kein
FAv
FB
Drehmoment zugewiesen werden muss. Dies vereinfacht die Rechnung.
x
Die Kräfte, die von der linken Stützstelle her einwirF
ken, sind leicht versetzt skizziert. Dies hat mit der graAh
phischen Gestaltung zu tun und beeinflusst die hier
FG
durchgeführte Rechnung nicht. Die Dicke des Balkens
berücksichtigen lassen wir unberücksichtigt.
Das Gleichungssystem enthält drei Aussax : FAh − F ⋅ sin 30 = 0
gen. Die erste verlangt, dass die Summe
über aller horizontalen Kräfte gleich Null
y : FAv + FB − FG − F ⋅ cos 30 = 0
ist. Die zweite Gleichung fügt alle vertikalen Kräfte zu einer Nullsumme zusammen
R : FB ⋅ 1.6 m − F ⋅ cos 30⋅1.2 m − FG ⋅ 0.8m = 0
und die letzte Aussage postuliert das Rotationsgleichgewicht.
Aus der ersten Gleichung folgt, dass die horizontale Komponente der Lagerkraft links gleich gross ist wie
die entsprechende Komponente der schief wirkenden Kraft, also 125 N. Das Rotationsgleichgewicht liefert
für die Auflagekraft rechts einen Wert von 236 N. Aus der Gleichgewichtsbedingung in y-Richtung lässt
sich noch die letzte Grösse, die Vertikalkomponente beim linken Lager, ermitteln. Für diese Grösse erhält
man 127.7 N.
Die hier skizzierte Strategie zur Lösung von Statikproblemen lässt sich
auf praktisch alle Aufgaben ausdehnen. Schwierigkeit treten hauptsächlich beim Freischneiden auf. So erweisen sich viele Annahmen, die man
Seite 192
Rotationsmechanik
zur Wirkrichtung einzelner Kräfte macht, bei sorgfälltiger Prüfung als
falsch oder zu eingeschränkt.
? Kontrollfragen
20.) Wieviele Freiheitsgrade besitzt ein starrer Körper in der Ebene? Wieviele im Raum?
21.) Wieviele Freiheitsgrade schränkt eine starre Achse ein?
22.) Ein Körper soll so festgehalten werden, dass er keine Translation aber eine beliebige Rotation
ausführen kann. Wie sieht eine solche Einspannvorrichtung aus?
23.) Wie berechnet man das Drehmoment einer Kraft in der Statik?
24.) Wie sieht das Gleichungssytem aus, welches das Gleichgewicht eines starren Körpers vollständig beschreibt?
Zusammenfassung von Kapitel 9
Seile und Pendelstützen übertragen Impuls ohne sich durchzubiegen. Demnach fliesst die Bewegungsmenge durch diese Bauteile hindurch, ohne Drehimpuls mitzunehmen. Mathematisch manifestiert sich die Forderung nach biegefreiem Impulstransport in der Verknüpfung der Stromstärke mit
dem durchflossenen Streckenabschnitt. Gemäss einer allgemeinen Relation muss der Quotient aus
Impulsstromstärke und zugehörigem Wegstück für alle drei Koordinatenrichtungen gleich gross sein.
Schneidet man das unter Zug stehende Seil oder die belastete Pendelstütze quer zur Stromrichtung
entzwei, zeigen die beiden Pfeile der neu entstandenen Kraftvektoren denn auch exakt in Transportrichtung.
Impuls, der quer zu seiner Bezugsrichtung fliesst, induziert einen Drehimpulsaustausch. Die Austauschrate ist proportional zum Produkt aus Impulsstromstärke und seitliche Versetzung des Stromes.
Zudem stehen Impuls, Transportrichtung und Drehimpuls rechtwinklig zueinander. Fliesst also in
einem Balken x-Impuls in y-Richtung, wird auf der ganzen Transportstrecke entweder z-Drehimpuls
zu- oder weggeführt. Weil der fest verankerte Träger selber keinen Drehimpuls speichert, leitet er
diesen unmittelbar weiter. Deshalb induziert beim beidseits aufliegenden Balken der gravitativ
zufliessende Impuls auf dem einen Teil eine Drehimpulszufuhr und auf dem andern eine entsprechende Abfuhr. Die Festigkeit des Balkens sorgt dafür, dass der Drehimpuls verzögerungsfrei vom
Ort des Zuflusses zu der Stelle geführt wird, an der er wieder verschwinden kann.
Der im Träger seitwärts fliessende Drehimpulsstrom wird beidseits von je einem Impulsstrom eingegrenzt. Diese Ströme belasten den Träger in der Regel bedeutend stärker als der Primärstrom, der
den Drehimpulstransport ausgelöst hat. Weist der Querschnitt des Trägers zwei zueinander senkrecht
stehende Symmetrieachsen auf und zeigt die eine in Bezugsrichtung des Drehimpulses, hängen die
Stromstärken von Drehimpuls und begleitendem Impuls recht einfach zusammen: die Impulsstromstärke legt fest, wie stark sich an dieser Stelle der Drehimpulsstrom ändert. Bei der mathematischen
Formulierung dieser Aussage müssen sowohl der Impuls- als auch der Drehimpulsstrom differentiell,
d.h. pro Höhenabschnitt, angegeben werden. Dabei ist die Höhe immer parallel zur zweiten Symmetrieachse zu messen. Weist der Querschnitt nur eine Symmetrieachse auf, greift man mit Vorteil auf
die klassische Beschreibung zurück. Zu diesem Zweck zerlegt man den ganzen Querschnitt in lauter
kleine Stücke und ordnet den zugehörigen differentiellen Impulsstromstärken je einen Drehimpuls
bezüglich der die Symmetrieachse durchstossenden neutralen Faser zu. Die Summation über alle
Teilflächen liefert dann die korrekte Drehimpuls-Impulsstrom-Verknüpfung. Wird vorausgesetzt,
Rotationsmechanik
Seite 193
dass sich die Querschnittfläche unter Belastung infolge linearem Materialverhalten nur abgekippt,
kann die Verknüpfung rein geometrisch mit Hilfe des sogenannten achsialen Flächenträgheitsmomentes angegeben werden.
Seite 194
Rotationsmechanik
10. Rotierende Bezugssysteme
Damit ein starrer Körper seinen Bewegungszustand ändert, muss er mit einem zweiten System
Impuls oder Drehimpuls austauschen können. Fehlt ihm diese Möglichkeit, so behält er seine
Geschwindigkeit und seine Winkelgeschwindigkeit bei. Bis jetzt haben wir uns keine Gedanken darüber gemacht, wie man diese beiden Grössen weit draussen im All messen kann. Auf der Erdoberfläche ist dies kein Problem. Hier kann immer ein festes Koordinatensystem eingeführt werden,
bezüglich dem die Bewegung eines Objektes beschrieben wird. Sobald vier feste Punkte auf dem
starren Körper auswählt sind, kann man diese in der Zeit verfolgt und die Werte der zugehörigen
Ortsvektoren laufend ermittel. Aus diesen Angeben kann dann ermittelt werden, wie schnell sich das
ausgewählte Objekt bewegt und mit welcher Winkelgeschwindigkeit es rotiert.
Aufgrund unserer irdischen Erfahrungen, stellen wir uns den Weltraum als Kasten vor, in dem sich
all die Galaxien mit ihren Sternen und ihren sonstigen Objekten bewegen. Die absolute Ruhe lässt
sich jedoch experimentell nicht feststellen. Wir können einzig das gewichtete arithmetische Mittel
über die Geschwindigkeiten sehr vieler Objekte in der Umgebung unseres Sonnensystems bilden und
uns ein Koordinatensystem vorstellen, das mit dem so ermittelten Massenmittelpunkt fest verbunden
ist. Bezüglich dieses Ruhesystems dürfen wir dann die Bewegung der Körper studieren und die
zugehörige Impuls- und Drehimpulsbilanz aufstellen. Wählen wir nun gedanklich ein zweites
Bezugssystem, das sich gegenüber dem Ruhesystem mit einer konstanten Geschwindigkeit bewegt,
sieht die Impulsbilanz oder das Grundgesetz der Translationsmechanik genau gleich wie vorher aus.
Weil im neuen Bezugssystem nur der Impulsinhalt, aber nicht die zugehörige Änderungsrate einen
andern Wert angenommen hat, sind die Impulsströme oder Kräfte gleich gross, wie im alten Bezugssystem.
Alle Bezugssysteme, die sich gegenüber dem Fixsternenhimmel mit einer konstanten Geschwindigkeit bewegen, nennt man Inertialsysteme. Bezüglich dieser ausgewählten Klasse von Systemen darf
die Impuls- und die Drehimpulsbilanz formuliert werden. Obwohl Einstein schon vor mehr als siebzig Jahren gezeigt hat, dass alle denkbaren Bezugssysteme bei geeignet gewählter Koordinatentransformation gleichberechtigt sind, wollen wir bei der alten Idee der Inertialsystem bleiben und uns
fragen, wie die Mechanik von einem rotierenden Bezugssystem aus formuliert werden muss. Wir
stellen uns also vor, dass wir auf einem rotierenden Teller sitzen und dabei felsenfest überzeugt sind,
dass dieses Karussell ruht und die Umgebung gegenläufig rotiert. Dies ist genau die Vorstellung, die
unsere Urahnen von der Erde und dem Himmel hatten.
Seltsamerweise funktioniert die Mechanik auch in einem rotierenden Bezugssystem. Der Grund ist
im Äquivalenzprinzip zu suchen, wonach sich die schwere Masse auf keine Art und Weise von der
trägen unterscheidet. Damit die Karussellmechanik in sich konsistent bleibt, muss eine feldinduzierte Kraft eingeführt werden. Den ortsabhängigen Teil dieser Trägheitskraft nent man Zentrifugalkraft und den geschwindigkeitsabhängigen Anteil Corioliskraft. Mit diesen beiden Korrekturtermen
darf auf jedem gegenüber dem Fixsternenhimmel rotierender Bezugssytem Mechanik betrieben werden. Wie dies im Detail zu geschehen hat und welche Auswirkungen diese beiden Schein- oder Trägheitskräfte auf das Bewegungsverhalten der einzelnen Körper hat, soll in diesem Kapitel näher
untersucht werden.
Mit der Ausweitung der Mechanik auf rotierende Bezugssysteme erhalten wir eine Theorie, die
immer dann eingesetzt werden kann, wenn es gilt, Vorgänge auf rotierenden Maschinenbestandteilen
zu untersuchen. Nebenbei werden wir noch begreifen, wieso wir von der Erdrotation eigentlich
nitchts spüren.
Rotationsmechanik
Seite 195
! Lernziele
1. In einem rotierenden Bezugssystem das Grundgesetz der Mechanik formulieren können.
2. Die potentielle Energie eines Körpers im rotierenden Bezugssystem berechnen können.
3. Wissen, wie man die Corioliskraft bestimmt, die auf einen irdischen Körper einwirkt.
10.1 Grundgesetz und absoluter Raum
Die Impulsbilanz, das Grundgesetz der Translationsmechanik, ver- der ruhende Weltraum
knüpft die Impulsströme mit der Inhaltsänderungsrate, beziehungsweise
die einwirkenden Kräfte mit der Beschleunigung. Mit Hilfe dieser Gleichung darf von den Kräften auf die Beschleunigung oder von der Beschleunigung auf die resultierende Kraft geschlossen werden. Weil für
die Gewichtskraft im Gegensatz zu den Einwirkungen an der Oberfläche
keine unmittelbare Messmethode existiert, kann das Gewicht entweder
nur statisch über eine Kompensationskraft oder rein dynamisch über die
Beschleunigung bestimmt werden. In beiden Fällen setzt die Messmethode ein Bezugssystem voraus. Newton selber ging von einem absolut
ruhenden Raum aus, bezüglich dessen sein Grundgesetz anzuwenden
ist. Doch auch er konnte kein Verfahren für den direkten Nachweis dieses Raumes angeben. Im neunzehnten Jahrhundert befasste sich Ernst
Mach die Idee des absoluten Raumes. Dabei kam er zum Schluss, dass
das Vorhandensein der Fixsterne für die Trägheit der einzelnen Körper
verantwortlich sei. Nach der Machschen Vorstellung spannen die Fixsterne den absoluten Raum auf.
Sobald man die Idee des absolut ruhenden Raumes akzeptiert hat, folgt Inertialsysteme
aus dem Grundgesetz oder Aktionsprinzip von Newton, dass alle nichtrotierenden, gleichförmig bewegten Bezugssysteme mechanisch gleichwertig sind. Misst man nämlich die Beschleunigung eines ausgewählten
Körpers bezüglich eines dieser Systeme, erhält man jedesmal den gleichen Wert. Weil die Beschleunigung die einzige geometrische Grösse
ist, die in das Grundgesetz eingeht, stimmt die Kräftesumme jedesmal
mit dem Produkt aus Masse und Beschleunigung überein. Das Grundgesetz der Mechanik gilt somit für die ganze Klasse der gegeneinander
gleichförmig bewegten Bezugssysteme. Insbesondere behält ein kräftefreier Körper seine Relativgeschwindigkeit bezüglich des in einem dieser Systeme sitzenden Beobachters bei. Weil damit der Trägheitssatz
von Galileo Galilei in all den zum absoluten Raum gleichförmig bewegten Bezugssystemen seine Gültigkeit beibehält, nennt man diese auch
Inertialsysteme.
? Kontrollfragen
1.)
2.)
Welche Kraft ist nicht direkt als Impulsstromstärke messbar?
Weshalb hat Newton den absolut ruhenden Raum eingeführt?
Seite 196
3.)
Rotationsmechanik
Wodurch unterscheidet sich ein Inertialsystem von den andern Bezugssystemen?
10.2 Verallgemeinertes Relativitätsprinzip und Trägheitsfelder
Schwere und Trägheit
Das Wort Masse steht für zwei verschiedene Eigenschaften der Materie.
Die eine, die statisch messbare Eigenschaft der schweren Masse, bestimmt die Stärke, mit der ein Körper an ein Gravitationsfeld koppelt.
Man könnte diese Grösse in Anlehnung an die Elektrostatik auch Gravitationsladung nennen. Die zweite Eigenschaft, die träge Masse, legt die
Geschwindigkeitsänderung eines Körper bei gegebenem Impulsaustausch fest. Die träge Masse verhält sich bezüglich des Impulses kapazitiv. Aus der klassischen Mechanik heraus lässt sich keinen zwingenden
Grund für die Identität dieser beiden Grössen angeben. Deshalb wurde
seit Newton immer wieder nach einem kleinen Unterschied zwischen
diesen beiden Eigenschaften der Materie gesucht. In ausgeklügelten Experimenten hat man zwei verschiedene Stoffe miteinander verglichen
und dabei gehofft, dass das Verhältnis von Schwere und Trägheit um einen kleinen Bruchteil voneinander abweichen. Experimentell ist bis auf
eine relative Genauigkeit von eins zu einer Billion nie ein Unterschied
festgestellt worden. Weil bis heute kein Unterschied auszumachen ist,
dürfen die beiden Eigenschaften gleich gesetzt und mit der gleichen
Einheit gemessen werden. Einstein hat diese Identität von schwerer und
träger Masse als eine Basisidee in seine Relativitätstheorie aufgenommen. Würde ein kleiner Unterschied zwischen Schwere und Trägheit
festgestellt, so müsst die allgemeine Relativitätstheorie wenigstens modifiziert werden.
frei fallende Systeme sind
lokal inertial
Die Äquivalenz von schwerer und träger Masse stellt die Idee des Inertialsystems in Frage. Lässt man zum Beispiel im innern einer Weltraumstation einen Körper los, behält dieser seine Geschwindigkeit bezüglich
der Raumkapsel bei. Diese Erscheinung ist eine direkte folge der
Gleichheit von Schwere und Trägheit: weil die Gravitationskraft proportional zur schweren Masse ist und die Trägheit den Zusammenhang zwischen Impulsaustausch und Beschleunigung festlegt, wird jeder Körper
im Umfeld der Kapsel gleich beschleunigt, d.h. die Beschleunigung eines frei fallenden Körpers ist immer gleich der Gravitationsfeldstärke.
Frei fallende Körper müssen untereinander gar keinen Impuls austauschen um zusammenzubleiben. Da sie ohnehin mit der gleichen Beschleunigung bewegt werden, genügt es, dass sie irgend einmal gleich
schnell gewesen sind. Ein um die Erde fallender Astronaut fühlt sich
deshalb schwerelos. Alle seine Organe erfahren in jedem Moment die
gleiche Beschleunigung, ohne dass der Impuls im seinem Körperinnern
herumtransportiert wird. Zwischen den eigentlichen Inertialsysteme, die
sich weit weg von Gravitationszentren gleichförmig gegen den Sternenhimmel verschieben, und den frei fallenden lässt sich experimentell kein
Unterschied feststellen. Einstein hat denn auch bei Formulierung seiner
Gravitationstheorie, der allgemeinen Relativitätstheorie, alle frei fallenden Systeme als Inertialsysteme angesehen.
Rotationsmechanik
Seite 197
Untersucht man die Bewegung eines Körpers von einem nichtrotieren- das Trägheitsfeld
den, aber gegenüber der Erdoberfläche beschleunigten Beobachterstandpunktes aus, so kann die im erdfesten Koordinatenssystem gemessene
Beschleunigung rein geometrisch durch die im beschleunigten Bezugssytem gemessene und durch die Relativbeschleunigung ersetzt werden.
Indem man die so in zwei Vektorkomponenten zerlegte Beschleunigung
ins Grundgesetz einfügt und den Relativanteil mal die Masse beidseits
subtrahiert, erhält man eines neues Gesetz, bei dem auf der rechten Seite
wieder das Produkt aus einer Masse und einer Beschleunigung steht.
Die in Gleichung (10.1) aufgeführte Beschleunigung ist vom beschleunigten System aus zu messen. Infolge der Äquivalenz von schwerer und
träger Masse darf die Gravitationsfeldstärke mit dem negativen Wert der
Systembeschleunigung vektoriell zu einer Gesamtfeldstärke addiert
werden. Die Beschleunigung des neuen Systems macht sich somit als
zusätzliches, homogenes Trägheitsfeld bemerkbar. Falls das beschleunigte Bezugsssystem stabil gebaut ist, kann dieses Trägheitsfeld experimentell nicht von einem echten Gravitationsfeld unterschieden werden.
Weil die Feldstärke des Trägheitsfeldes gleich dem negativen Wert der in frei fallenden Systemen
Systembeschleunigung ist, wird bei einem frei fallenden System das spürt man keine äusseren Graäussere Gravitationsfeld durch ein internes Trägheitsfeld kompensiert. vitationsfelder
Dieser Sachverhalt kann auch noch anders formuliert werden: in einem
frei fallenden System werden äussere Gravitationsfelder wegtransformiert.
Mit der Feststellung, dass Gravitationsfelder durch die Beschleunigung die Einsteinergänzung oder das
des Bezugssystems erzeugt und vernichtet werden können, haben wir verallgemeinerte Relativitätsder Idee des Inertialsystems den Todesstoss versetzt. Wir kennen nun prinzip
eine Vorschrift, mit der jedes nichtrotierende System zu einem vollwertigen Bezugssystem für die Mechanik umfunktioniert werden kann:
beim Uebergang von einem Beobachterstandpunkt zu einem andern ist
das gemessene Gravitationsfeld durch ein homogenes Trägheitsfeld zu
ergänzen, dessen Feldstärke entgegengesetzt gleich gross ist wie die im
alten System gemessene Relativbeschleunigung des neuen Bezugssystems. Ich nenne diese Vorschrift das verallgemeinertes Relativitätsprinzip der Mechanik oder die Einsteinergänzumg. Gemäss dem
verallgemeinerten Relativitätsprinzip darf in jedem nichtrotierenden System eine Impulsbilanz aufgestellt werden. Dieses Grundgesetz hat dann
den gleichen Anspruch, die Bewegung eines Körpers korrekt zu beschreiben, wie das ursprüngliche Gesetz von Newton, das eigentlich nur
in einem absolut ruhenden Weltraum angewendet werden darf.
Beschleunigung und Gravitation sind nur bedingt gegeneinander ab- das Gewicht ist keine absolute
grenzbar, weil infolge der Äquivalenz von schwerer und träger Masse Grösse
nicht gesagt werden kann, ob ein über die Systemgrenze fliessender Impulsstrom gespeichert oder mit einem Gravitationsfeld ausgetauscht
wird. So kann der Impulszufluss vom einen Bezugssystem aus gesehen
eine Inhaltsänderung bewirken, wogegen man von einem zweiten, mitbewegten Standpunkt aus den Eindruck erhält, dass der zugeführte Im-
Seite 198
Rotationsmechanik
puls fortlaufend an ein Gravitationsfeld weiterfliesst. Diese Relativität
der Gravitationsfeldstärke ist dafür verantwortlich, dass die Grösse der
Gewichtskraft vom jeweiligen Bezugssystem mitbestimmt wird. Das
Gewicht eines Körpers hängt also nicht nur vom Ort, sondern auch noch
von der Beschleunigung des Bezugssystems ab.
? Kontrollfragen
4.)
5.)
6.)
7.)
8.)
Was veranlasst uns anzunehmen, dass schwere und träge Masse äquivalent sind?
Wie kann man feststellen, ob man sich in einem Inertialsystem befindet?
Wieso fühlen sich Astronauten schwerelos?
Die Gravitationsfeldstärke der Sonne am Ort der Erde beträgt etwa 6·10-3 N/kg. Ist man
infolge dieser Wirkung tagsüber leichter als in der Nacht?
Die Sonne wirkt mit einer um 179 mal grösseren Kraft auf die Erde ein als der Mond. Wie
kann da der Mond die grössere Gezeitenwirkung entfalten?
10.3 Koordinatentransformation
Im letzten Abschnitt habe ich nur translatorisch beschleunigte Bezugssysteme diskutiert, weil bei diesen die Beschleunigung überall gleich
gross ist. Bevor wir uns mit der Dynamik der rotierenden Systeme beschäftigen, müssen der rein geometrische Aspekt, die Koordinatentransformation, gründlich diskutiert und die zugehörigen Formeln sauber
hergeleitet werden. Dazu betrachten wir die ebene Bewegung eines materiellen Punktes. Die momentane Position des punktförmigen Körpers
werde durch die Spitze des Ortsvektor r markiert. Nun darf dieser Ortsvektor bezüglich des ruhenden Koordinatensystems in die Komponenten
x und y zerlegt werden. Im rotierenden System heissen die Komponenten x’ und y’.
Weil die Summe über die beiden Komponenten für beide Zerlegungen
wieder den Ortsvektor ergeben muss, kann die eine Vektorsumme durch
die andere ausgedrückt werden
In der Komponentenschreibweise kann diese Gleichung rein algebraische als Matrizenrechnung formuliert werden,
Den Drehwinkel in der zweiten Matrix habe ich durch das Produkt aus
Winkelgeschwindigkeit und Zeit ersetzt. Leitet man diese Matrizengleichung einmal nach der Zeit ab, erhält man einen Ausdruck, der aus zwei
Teilen besteht
Der erste Term steht für den im rotierenden System gemessene Geschwindigkeitsvektor, zerlegt in die Komponenten des Ruhesystems.
Die Klammer im zweiten Summanden stellt einen Vektor dar, dessen
Länge gleich dem Radius ist und der normal zum Radiusvektor steht.
Die Gleichung wird übersichtlicher, falls man in eine koordinatenfreie
Darstellung wechselt
Rotationsmechanik
Seite 199
Gleichung () sagt, dass die Relativgeschwindigkeit des materiellen
Punktes plus die Tangentialgeschwindigkeit des zugehörigen Ortes auf
dem rotierenden System die Geschwindigkeit des Punktes im Ruhesystem ergibt. Leitet man Formel () ein zweites Mal nach der Zeit ab, erhält man die Beschleunigungstransformation
In der koordinatenfreien Darstellung können wir Formel () besser diskutieren
Der erste Term steht für die Relativbeschleunigung. Der zweite Ausdruck ist nur geschwindigkeits- und der dritte nur ortsabhängig. Die soeben durchgeführte Zerlegung der Beschleunigung in drei Terme, ist
eine rein geometrische Angelegenheit, die mit der Struktur der Mechanik eigentlich nichts zu tun hat. Erst die Äquivalenz von schwerer und
träger Masse nacht aus dieser kinematischen Zerlegung eine neue dynamische Sicht.
?Kontrollfragen
9.)
10.)
Zeigen Sie, dass der Vektor im zweiten Term von Formel () normal zum Radius steht.
Berechnen Sie mit Hilfe von () und () die Geschwindigkeit bzw. die Beschleunigung eines
Körpers, der auf dem sich drehenden Karussell ruht.
10.4 Trägheitskräfte
Die Summe über alle Kräfte ist gleich Masse mal Beschleunigung. Diese Aussage, das Grundgesetz von Newton, gilt in jedem Inertialsystem.
Im rotierenden Bezugssystem kann die Resultierende der einwirkenden
Kräfte jedoch nicht direkt mit Hilfe dieses Gesetztes aus der kinematisch bestimmten Beschleunigung berechnet werden. Zur Berechnung
der korrekten Gleichung setzen wir die Beschleunigungstransformation
() ins Grundgesetz der Mechanik ein und bringen zwei Terme durch Addition auf die andere Seite
Weil für alle bekannten Materialien die Schwere und die Trägheit streng
proportional zueinander sind und somit gleichgesetzt werden können,
vereinfacht sich () zu
Mit der Formel () haben wir ein neues Grundgesetz konstruiert, das nur
auf gleichmässig rotierenden Systemen gültig ist. Somit „wirken“ auf
einem Karussell neben der Gewichtskraft noch zwei weitere, massenproportionale, nicht direkt messbare Kräfte. Die eine ist ortsabhängig
und heisst Zentrifugalkraft. Die andere, die geschwindigkeitsabhängige,
nennt man Corioliskraft. Zentrifugal- und Corioliskraft bezeichnet werden oft als Scheinkräfte bezeichnet, weil sie für einen Teil der Impulsänderungsrate und nicht für eine Impulsaustauschrate stehen. Alle in
Nichtinertialsystemen zusätzlich einzuführende Trägheits- oder Scheinkräfte ersetzen einen Teil der Impulsänderungsrate. Sie stehen nie für
Seite 200
Rotationsmechanik
eine Impulsstromstärke zwischen zwei Systemen und erfüllen daher das
Wechselwirkungsprinzip nicht.
?Kontrollfragen
11.) Was unterscheidet die Zentrifugal- von der Corioliskraft?
12.) Ein Motorrad (Masse mit Fahrer 120 kg) fährt auf einem Karussell, das sich vier Mal pro
Minute um die eigene Achse dreht, fünf Meter von der Drehachse entfernt mit einer Relativgeschwindigkeit von 4 m/s im Kreis herum. Berechnen Sie die Haftreibungskraft auf zwei verschiedene Arten. Das erste Mal argumentieren Sie im Ruhesystem und das zweite Mal im
Karussellsystem.
13.) Die Bewegung einer von der Decke herunterhängenden Glühbirne ist von einem rotierenden
System aus zu diskutieren. Zeigen Sie, dass mit Hilfe von () die richtige Relativbeschleunigung berechnet werden kann.
10.5 Das Zentrifugalfeld
Zentrifugalfeld und Gravitationsfeld sind lokal ununterscheidbar
Die Zentrifugalkraft ist nur vom Ort im rotierenden System abhängig.
Als massenproportionale Volumenkraft ist sie lokal nicht von einer Gewichtskraft zu unterscheiden. Die erzeugende Zentrifugalfeldstärke ω2·r
lässt sich folglich auch nicht gegen eine normale, masseninduzierte Gravitationsfeldstärke abgrenzen. Lokale, mittels gravimetrischen Methoden gemessene Feldstärken, wie sie von Geologen ermittelt und in
spezielle geophysikalische Karten eingetragen werden, enthalten - je
nach geographischer Breite - einen kleinen Anteil, der vom Zentrifugalfeld der Erde stammt.
der Geotropismus zeigt die
Richtung des Gravitationsfeldes an
Auch Pflanzen können nicht zwischen einem Zentrifugal- und einem
Gravitationsfeld unterscheiden. Dies zeigt ein mit wenig Aufwand
durchzuführendes Experiment. Getreide muss, damit es unter dem Gewicht der Ähre nicht zusammenbricht, genau senkrecht nach oben
wachsen. Dieses Wachstum wird hormonell gesteuert und als negativer
Geotropismus bezeichnet. Sät man nun Getreidekörner auf einem rotierenden Nährboden aus, so kann nach einigen Tagen beobachtet werden,
wie die Halme gegen die Rotationsachse geneigt nach oben wachsen.
Dabei ist die Lotabweichung umso grösser, je weiter sich der Halm von
der Drehachse entfernt befindet. Die Halme wachsen an jeder Stelle gegen die auf dem Drehteller lokal nachweisbare Feldstärke. Nur ein aussenstehender Beobachter hat die Möglichkeit, das durch die
Getreidehalme sichtbar gemachte Feld in ein echtes, homogenes Gravitations- und ein unechtes, zylindersymmetrisches Zentrifugalfeld zu zerlegen.
das Potential des Zentrifugalfeldes
Das Zentrifugalfeld besitzt auch ein Potential. Seine Äquipotentialflächen bilden der Symmetrie entsprechend konzentrische Zylinder um die
Drehachse herum. Die Funktion für den Potentialverlauf gewinnt man
durch Integration der Feldstärke längs des Radius
Rotationsmechanik
Seite 201
Das Zentrifugalpotential weist nur negative Werte auf, weil der zugehörige Potentialnullpunkt, der Bezugspunkt für die Integration, willkürlich
auf der Drehachse gewählt worden ist.
Ruhender Gewässer bilden die Äquipotentialflächen des lokal nachweis- die Wasseroberfläche in einem
baren Gravitationsfeldes stückweise durch ihre Oberfläche nach. Mit rotierenden Glas
dieser Erkenntnis lässt sich die Form der Wasseroberfläche in einem
gleichmässig rotierenden Gefäss über das Potential des Gesamtfeldes
bestimmen. Im rotierenden Behälter herrscht ein Gravitationsfeld, das
man sich als Überlagerung des homogenen Feld der Erde und des Zentrifugalfeld vorstellen darf. Dem homogenen Erdfeld darf ein proportional mit der Höhe zunehmendes Potential zugewiesen werden und für
das Zentrifugalfeld gilt Formel (). Das Superpositionsprinzip erlaubt
nun, dass diese beiden Potentialfelder zusammengzählt werden dürfen.
Wird nun für das Potential ein festen Wert eingesetzt, am besten Null,
erhält man die für die Wasseroberfläche die Höhe als Funktion des Radius
Ein ganz kleines Schiff, das in einem rotierenden, wassergefüllten Gefäss von der Drehachse aus nach aussen fährt, schwimmt auf einer
Äquipotentialfläche. Es benötigt für diese Bewegung gleichviel Energie
wie bei einer Fahrt in einer gewöhnlichen Badewanne. Die Abnahme der
Zentrifugalenergie wird an jedem Ort auf der parabolisch geformten
Wasseroberfläche durch eine entsprechende Zunahme der Gravitationsenergie exakt kompensiert. Würde man in einem Freizeitpark den Badelustigen rotierende Bassins zur Verfügung stellen, so könnten diese
bergauf und bergab schwimmen, ohne einen Unterschied festzusellen.
Die Relativitätstheorie lehrt, dass die Unterteilung in kinetische und po- die Leistung der Zentralkraft
tentielle Energie eine Frage des Bezugssystems ist. Diesen doch überra- bei Radialbewegung
schenden Sachverhalt wollen wir an einem kleinen Beispiel diskutieren.
Ein Spielzeugauto werde auf einem gleichmässig rotierenden Teller mit
Hilfe eines Seils radial nach innen gezogen. Dabei wird darauf geachtet,
dass sich das Fahrzeug mit einer konstanten Geschwindigkeit v’ längs
eines Radius nach innen bewegt. Die Stärke des über das Seil ins Auto
fliessenden Energiestromes entspricht der Leistung der Seilkraft. Diese
Leistung ist bezüglich des Tellers gleich dem Produkt aus der Seilkraft
und der Relativgeschwindigkeit v’. Ein aussenstehender Beobachter
muss der Seilkraft die gleiche Leistung zuordnen, weil die zusätzlich in
Erscheinung tretende Umfangsgeschwindigkeit genau normal zur Seilkraft steht. Normalstehende Geschwindigkeitskomponenten geben aber
keinen Beitrag zur Leistung, da diese als Skalarprodukt aus Kraft und
Geschwindigkeit der Kraftangriffsfläche zu berechnen ist.
Die oben diskutierten Äquipotentialflächen schneiden den rotierenden Hubarbeit im Zentrifugalfeld
Teller auf konzentrischen Kreisen; auf dem rotierenden Teller ist aussen
eigentlich unten. Diese Tatsache wird vielleicht bei interplanetaren
Raumflügen einmal ausgenutzt. Damit die Astronauten nicht jahrelang
der Schwerelosigkeit ausgesetzt sind und dabei Knochen und Muskeln
abbauen, lässt man sie dannzmal in einer radförmigen Raumstation hau-
Seite 202
Rotationsmechanik
sen. Dreht sich diese Station mit der richtigen Winkelgeschwindigkeit
um die Radachse, können die Astronauten auf der Innenseite der „Felge“ herumlaufen und sich ganz zu hause fühlen. Für den auf dem rotierenden Teller sitzenden Beobachter wird das Auto quasi den Berg
hinaufgezogen. Er sieht, wie das Auto gezogen wird und dabei an Höhe
gewinnt. Folgerichtig muss er annehmen, dass die über das Seil zugeführte Energie als potentielle Energie im Zentrifugalfeld gespeichert ist.
Für ihn ist die Leistung der Seilkraft gleich der Änderungsrate der potentiellen Energie im Zentrifugalfeld.
die Änderungsrate der kinetischen Energie bei Radialbewegung
Ein aussenstehender Beobachter kommt hingegen zu einem ganz andern
Schluss. Er sieht kein Zentrifugalfeld, das Energie speichern könnte.
Zudem kann er zusehen, wie das Fahrzeug umso langsamer wird, je
weiter es nach innen fährt. Von aussen gesehen nimmt die Bewegungsenergie des Autos ab. Die Änderungsrate der kinetischen Energie lässt
sich leicht berechnen, wenn man bedenkt, dass diese Bewegungsenergie
additiv aus einem radialen und einem tangentialen Anteil zusammengesetzt ist. Der radiale Anteil ändert sich nicht, weil die Relativgeschwindigkeit konstant bleibt. Die Änderungsrate rührt folglich nur von der
Abnahme der Umfangsgeschwindigkeit her und kann über die Differentiation des tangentialen Anteils der kinetischen Energie nach der Zeit
berechnet werden
bei Radialbewegungen wird
Energie mit dem rotierenden
System ausgetauscht
Der aussenstehende Beobachter steht nun vor der paradoxen Situation,
dass die kinetische Energie des Autos abnimmt, obwohl fortlaufend ein
Energiestrom über das Seil ins Auto hineinfliesst. Das Paradoxon löst
sich auf, sobald wir die Haftreibungskraft vom Karussell auf die Räder
in die Analyse miteinbeziehen. Diese Kraft, die normal zur Relativgeschwindigkeit steht, kompensiert im mitbewegten Sytem die Corioliskraft und hat deshalb den Betrag
Im Karussellsystem ist diese Haftreibung als Führungskraft leistungsfrei. Vom Standpunkt eines aussenstehenden Beobachters aus muss dieser Kraft jedoch ein Energiestrom zugeordnet werden. Diese Leistung
ensteht, weil sich die Angriffsflächen der Haftreibungskraft gegen die
Wirkrichtung derselben bewegen. Ordnet man der Haftreibungskraft die
korrekte Leistung zu, indem man sie mit der im Bezugssystem gemessenen Geschwindigkeit der Kraftangriffsfläche skalar multipiziert, erhält
man ein bemerkenswertes Resultat
Die Energieerhaltung für einen
aussenstehenden Beobachter
Die Summe aus der Seilkraftleistung und der Leistung der Haftreibungskraft ergibt die Änderungsrate der kinetischen Energie. Damit ist
die Energieerhaltung wieder gewährleistet. Von aussen gesehen strömt
Energie über das Seil zu und mit doppelter Stromstärke an den Karussellboden weg. Die zusätzlich ans Karussell wegfliessende Energie entsprignt der Änderung der kinetischen Energie des absolut gesehen
langsamer werdenden Autos. Der ganze Energiestrom kann an der Achse des Karussells als Leistung des zur Drehzahlstabilisierung notwendigen Drehmomentes wieder nachgewiesen werden. Könnte sich der
Teller nämlich frei drehen, würde sich seine Drehzahl beim Hineinzie-
Rotationsmechanik
Seite 203
hen des Autos ändern (Drehimpulserhaltung). Damit käme er aber als
gleichmässig rotierendes Bezugssystem nicht mehr in Frage.
?Kontrollfragen
14.)
Mit welcher Winkelgeschwindigkeit muss eine Raumstation rotierenden, damit an der Peripherie, zehn Meter von der Drehachse entfernt, ungefähr das gleiche Gravitationsfeld herrscht
wie an der Erdoberfläche?
15.) Weit über der Erdoberfläche heben sich das im System der Erde einzuführende Zentrifugalfeld
und das von der Erdmasse erzeugte Gravitationsfeld auf. Wo liegen diese Punkte? Was befindet
sich dort?
16.) In einer Neuauflage des Turmbaus zu Babel sei es gelungen, mit Hilfe extremer Leichtbautechnik einen Liftschacht zu konstruieren, der weit in den Weltraum hinausreicht. In diesem
Schacht werde ein Satellit mittels eines Seils in die geostationäre Bahn gehievt. Wie berechnet
sich die Arbeit der Seilkraft?
10.6 Der Angriffspunkt der Zentrifugalkraft
Die Zentrifugalkraft zeichnet man in der Regel zusammen mit einer greift die Zentrifugalkraft im
Wirklinie ein, die durch den Massenmittelpunkt des betreffenden Kör- Schwerpunkt an?
pers verläuft. Bevor wir den Wahrheitsgehalt dieser Konstruktion überprüfen, sei eine Bemerkung zum Angriffspunkt beigefügt. Kräfte greifen
entweder an einem Teil der Oberfläche oder am ganzen Volumen an. Der
Begriff des Angriffspunktes ist somit hypothetisch und für die Formulierung der Impulsbilanz, des Grundgesetzes der Translationsmechanik,
unnötig und ein Stück weit irreführend. Erst wenn man sich für die Rotation eines Körpers interessiert, muss mehr über die Lage der Kraftangriffsfläche bekannt sein. Dann ist das begleitende Drehmoment über
einen Steckenvektor zu berechnen, der vom Massenmittelpunkt zum Ort
des Impulsaustausches zeigt (Formel ). Man schreibt der Kraft also nur
eine Wirklinie zu, damit das begleitende Drehmoment bestimmt werden
kann. Bei einer Volumenkraft ist die Wirklinie analog definiert. Der Gewichtskraft ist kein Drehmoment zuzuordnen, sobald sich der Körper im
homogenen Gravitationsfeld befindet, d.h. die Wirklinie der Gewichtskraft verläuft unabhängig von der Stellung des Körpes durch dessen
Massenmittelpunkt. Deshalb kann bezüglich der Translations- und die
Rotationswirkung die Wirkung des homogenen Gravitationsfeldes auf
eine Ersatzkraft mit punktförmiger Angriffsfläche reduziert werden, die
selber genau im Massenmittelpunkt angreift. Diesen Ort nennt man
denn oft auch Schwerpunkt.
Nach dieser kleinen Repetition des Begriffes Wirkline soll die Frage neu die kreisende Hantel.
formuliert werden: kann die Zentrifugalkraft durch eine Einzelkraft ersetzt werden, welche im Massenmittelpunkt angreift? Dazu ein einfaches Beispiel. Eine ideale Hantel, bestehend aus zwei punktförmigen
Körpern der Masse m und einem masselosen Verbindungsstab der Länge
s , kreise an einem Seil festgebunden um eine starre Achse. Der Massenmittelpunkt der Hantel beschreibe einen Kreis mit dem Radius r. Ein
Seite 204
Rotationsmechanik
Gravitationsfeld sei nicht vorhanden, dafür schliesse die Hantel mit
dem Seil den Winkel α ein. Wo muss die Seilkraft angreifen, damit der
Hantelstab längs der Mantellinie eines Kegels ausgerichtet bleibt?
Statik im mitbewegten System
Vom mitrotierenden Bezugssystem aus betrachtet, herrscht Gleichgewicht, d.h. die Summe der drei Kräfte und die Summe der zugehörigen
statischen Drehmomente muss gleich Null sein. Daraus folgt, dass die
Seilkraft betragsmässig gleich gross ist, wie die Summe der beiden Zentrifugalkräfte
die Wirklinie der Zentrifugalkraft geht nicht durch den
Schwerpunkt
Die beiden Zentrifugalkräfte dürfen, wie aus Formel () hervorgeht,
durch eine Einzelkraft ersetzt werden, deren Betrag gleich gross ist, wie
die eines punktförmigen Vergleichskörpers mit gleicher Masse und gleicher Lage des Massenmittelpunktes. Dieser Ersatz funktioniert jedoch
nicht bei den zugehörigen Drehmomenten. Im mitrotierenden System
stellt sich nur ein Gleichgewicht ein, wenn das Seil näher bei der äusseren als bei der inneren Kugel befestigt ist. Die Angriffsstelle des Seils
muss deshalb gegenüber der Mitte der Hantel längs des Stabes um den
Betrag
versetzt gewählt werden. Nur so heben sich alle drei Kräfte in ihrer
Drehwirkung auf. Was wir an dieser idealen Hantel eingesehen haben,
ist von allgemeiner Gültigkeit. Im mitrotierenden System ist die zusätzlich einzuführende Zentrifugalkraft immer gleich gross wie diejenige eines punktförmigen Vergleichskörpers gleicher Masse und gleicher Lage.
Die Wirklinie, die wir der Zentrifugalkraft zuschreiben müssen, verläuft
jedoch nicht durch den Massenmittelpunkt. Dies, weil das Zentrifugalfeld eine andere geometrische Struktur aufweist als das homogene Gravitationsfeld. Die Aussage, wonach die Zentrifugalkraft im
Massenmittelpunkt angreift, wäre damit widerlegt.
die Hantel ändert fortdauernd
ihren Drehimpulsinhlat
Nun analysieren wir die kreisende Hantel vom sogenannten Ruhesystem
aus. Bei dieser Betrachtungsweise wirkt nur noch die Seilkraft. Die Seilkraft bewirkt eine Impulsänderungsrate, die gleich Masse mal Beschleunigung des Massenmittelpunktes ist. Dieser Wert stimmt mit der Grösse
der im rotierenden System einzuführenden Zentrifugalkraft überein.
Weil der Angriffspunkt einer Oberflächenkraft unabhängig vom Beobachter ist, muss die Seilkraft auch im Ruhesystem von einem Drehmoment begleitet sein. Damit ändert sich der Drehimpuls der Hantel
fortdauernd. Doch wie wirkt sich diese dauernde Drehimpulsänderung
bei der Hantel aus?
die dynamische Unwucht der
Hantel
Der Drehimpuls der kreisenden Hantel kann in einen Bahn- und einen
Eigendrehimpuls aufgespalten werden. Auf die Bahndrehimpulsanalyse
kann verzichtet werden, weil sie dieselbe Information über das Verhalten eines Systems liefert wie die Translationsmechanik. Wir diskutieren
deshalb nur den Eigendrehimpuls der Hantel. Da diese Grösse unabhängig von der Bewegung des Massenmittelpunktes ist, können wir uns auf
eine Hantel beschränken, die in schiefer Lage um eine durch den Massenmittelpunkt gehende Achse rotiert. Der Drehimpulsvektor der Hantel
Rotationsmechanik
Seite 205
steht damit schief zur Drehachse und wird auf der Mantelfläche eines
Kegels herumgewirbelt. Diese dauernde Richtungsänderung des Drehimpulsvektors erzeugt eine Aenderungsrate darstellt, die genau so gross
ist wie das Drehmoment des Seils. Damit haben wir gezeigt, dass die
Grösse und die versetzte Lage der Seilkraft auch im Ruhesystem Sinn
macht: das Seil wirkt mit einer Kraft und einem Drehmoment auf die
Hantel ein, weil diese weder statisch noch dynamisch ausgewuchtet ist.
Zur quantitativen Untersuchung der Rotationsbewegung beschränke ich der Eigendrehimpuls der Hanmich wieder auf eine Hantel, die schief um eine durch den Massenmit- tel
telpunkt gehende Achse rotiert.
Der Eigendrehimpuls der Hantel, der sich aus den beiden Bahndrehimpulsen der punktförmigen Kugeln zusammensetzt, liegt in der Ebene
drin, die durch den Stab und die Winkelgeschwindigkeit definiert ist.
Zudem steht er normal zur Hantelachse
Nun darf der Eigendrehimpuls in zwei rechtwinklig aufeinander stehende Komponenten zerlegt werden
Die Achsialkomponente des Drehimpulses änder sich während eines
Umlaufes nicht. Für die Änderungsrate der Radialkomponente gilt mathematisch der gleiche Zusammenhang wie für die Änderungsrate des
Impulses bei der Kreisbwegung (vergl.)
Bei der dritten Umformung in () wurden Formel (18) und (19) verwen- das Seildrehmoment ist gleich
det. Wie Formel () zeigt, ist die Änderungsrate des Hanteldrehimpulses der Änderungsrate des Hanteldrehimpulses
gleich dem vom Seil erzeugten Drehmoment.
?Kontrollfragen
17.) Wann ist ein Körper statisch, wann dynamisch ausgewuchtet?
18.) Greift die Zentrifugalkraft im Schwerpunkt eines Körpers an?
10.7 Die Corioliskraft
Die Corioliskraft hat die gleiche mathematische Struktur wie die Lor- Coriolis- und Lorentzkraft
entzkraft
Nur wirkt bei der Lorentzkraft ein Magnetfeld auf einen elektrisch geladenen Körper und bei der Corioliskraft ein Winkelgeschwindigkeitsfeld
auf einen massiven Körper ein. Die Corioliskraft verschwindet, sobald
man die Bewegung von einem nichtrotierenden Bezugssystem aus diskutiert. Doch auch die Lorentzkraft kann zum Verschwinden gebracht
werden. Man muss den geladenen Körper nur von dessen momentanen
Ruhesystem aus betrachtet werden.
Seite 206
Rotationsmechanik
die Corioliskraft wirkt selten
alleine
Leider taucht die Corioliskraft als siamesischer Zwilling der Zentrifugalkraft selten ohne Partner auf. Einzig auf der Drehachse des rotierenden Systems wirkt sie alleine auf den bewegten Körpers ein. Leider ist
auch an diesem Punkt das Studium der Corioliskraft ohne den störenden
Einfluss des Zwillingpartners kaum möglich. Sobald der bewegte Körper die Mitte wieder verlässt, dominiert die Zentrifugalkraft wieder.
die Corioliskraft erzeugt eine
Kreisbewegung
Als Gedankenexperiment kann man sich jedoch einen Drehteller vorstellen, auf dem nur die Corioliskraft eine Wirkung entfaltet. Dazu muss
der zu studierende Körper reibungsfrei gelagert und mit einem Seil festgehalten werden. Dieses Seil wird in der Mitte des Drehtellers durch ein
vertikales Loch ins Innere der Achse geführt und dort an einer Feder
festgebunden. Ist die Federkonstante gleich der Masse des Körpers mal
das Quadrat der Winkelgeschwindigkeit des Drehtellers und hat die
Schnur die richtige Länge, so kompensiert diese Vorrichtung die Zentrifugalkraft an jeder Stelle auf dem Teller. Selbstverständlich müsste noch
dafür gesorgt werden, dass nirgends eine namhafte Reibung auftritt. Ein
so fixierter Körper, der irgendwo auf den Drehteller abgesetzt worden
ist, würde sich mit dem Teller im Kreis berum bewegen, bis man ihn anstösst. Nach dem Stoss würde er sich wie ein geladenes Teilchen im homogenen Magnetfeld bewegen. Er würde also relativ zum Drehteller
eine Kreisbewegung vollführen
die Corioliswirkung lässt die
Tiefdruckgebiete rotieren
Infolge der relativ kleinen Winkelgeschwindigkeit ist die Corioliskraft
auf der Erdoberfläche sehr gering. Ihre Wirkung ist nur bei grossräumigen Bewegungen beobachtbar. Ein bekanntes Phänomen bildet die Ablenkung der Winde in grossen geographischen Breiten: die Corioliskraft
treibt auf der Nordhalbkugel die Luft im Gegenuhrzeiger- und auf der
Südhalbkugel im Uhrzeigersinn in die Tiefdruckgebiete hinein.
die Corioliskraft auf der Erdoberfläche
Auf der gewölbten Erdoberfläche kann der Geschwindigkeitsvektor eines bewegten Gegenstandes je nach geographischer Lage beliebig zur
Drehachse stehen. Formel () gilt auch für solch allgemeine Bewegungen. Zur Berechnung der Corioliskraft kann die Geschwindigkeit des
Körpers in eine bezüglich der Erdachse normale und in eine kollineare
Komponente aufgeteilt werden. Dann bildet man das Produkt der Beträge von Winkelgeschwindigkeit und Normalkomponente.
die Corioliskraft ist leistungsfrei
Coriolis- und Lorentzkraft sind in jedem Fall leistungsfrei, weil beide
Kräfte in jedem Moment normal zur Geschwindigkeit stehen. Deshalb
vermag ein Magnetfeld geladene Körper nur abzulenken, aber nicht abzubremsen oder schneller zu machen. Dass der Corioliskraft keine Leistung zugeschrieben werden kann, folgt mathematisch aus der Formel
(). Multipliziert man diesen Ausdruck skalar mit der Geschwindigkeit,
entsteht ein Spatprodukt mit zwei identischen Vektoren. Corioliskräfte
verändern deshalb nie die kinetische Energie eines Körpers, d.h. die einzige Wirkung der Corioliskraft liegt in der Änderung der Bewegungsrichtung. Umgangssprachlich würde man die Corioliskraft als
nichtbeschleunigende Kraft bezeichnen (ich hoffe, dass Sie den Unterschied zwischen dem physikalischen und dem alltäglichen Gebrauch
Rotationsmechanik
Seite 207
des Wortes Beschleunigung mittlerweile kennen).
? Kontrollfragen
19.)
20.)
21.)
22.)
23.)
Ein Körper mit einer Masse von einem Kilogramm bewegt sich mit einer Relativgeschwindigkeit von zwei Metern pro Sekunde auf einem Teller, der mit einer Winkelgeschwindigkeit von
fünf Radianten pro Sekunde rotiert. Durch eine spezielle Vorrichtung werde die Zentrifugalkraft an jedem Punkt exakt ausgeglichen. Wie sieht die Bahn des Körpers auf dem Teller aus,
wenn dieser vier Meter vom Drehzentrum entfernt genau normal zum Radius angestossen worden ist?
Ein Körper (Masse 10 kg) bewegt sich mit 10 m/s horizontal über den Nordpol. Wie gross ist
die Corioliskraft, die auf ihn einwirkt?
Derselbe Körper bewege sich mit der gleichen Geschwindigkeit einmal in Nord-Süd- und einmal in Ost-West-Richtung horizontal über den oder längs des Aequators. Wie gross ist die
Corioliskraft in beiden Fällen? Wie ist sie gerichtet?
Der Auto (Masse 1000 kg) fährt in Winterthur mit 72 km/h einmal in Nord-Süd und einmal in
Ost-West-Richtung. Wie gross ist die Corioliskraft bei diesen zwei Bewegungen? Wie ist sie
gerichtet?
Wie muss ein Windkraftwerk gebaut sein, damit es die Corioliskraft ausnutzen kann?
Antworten zu den Kontrollfragen
1.1 Oberflächenkräfte und Geschwindigkeitsänderungsrate (Beschleunigung) sind im Prinzip direkt messbar. Nicht direkt messbar ist die Gewichts- oder Gravitationskraft.
1.2 Newton hat in seinem Grundgesetz die Einwirkung (resultierende
Kraft) auf ein System mit einer rein geometrischen Grösse (Beschleunigung des Körpers) verknüpft. Eine geometrische oder kinematische
Grösse ist aber nur messbar, falls ein Referenzsystem vorhanden ist. Von
diesem Bezugssystem hat Newton angenommen, dass es ohne Voraussetzung als absoluter Raum existiert.
1.3 Die Gewichtskraft misst man entweder indirekt über die Kompensationskraft, die den Körper im Gleichgewicht hält, oder über die Wirkung, die Beschleunigung.
1.4 In allen Inertialsystemen darf die Newtonmechanik angewendet
werden. Insbesondere gilt in Inertialsystemen der Trägheitssatz.
1.5 Alle zu einem bestimmten Inertialsystem gleichförmig bewegten Systeme sind ebenfalls inertial, d.h. es gibt beliebig viele Inertialsysteme.
2.1 Die Aequivalenz von Schwere und Trägheit ist eine Erfahrungstatsache.
2.2 Inertialsysteme können experimentell nicht nachgewiesen werden,
Seite 208
Rotationsmechanik
da eine lokal gemessene Gravitationsfeldstärke auf eine Beschleunigung
des Systems oder auf eine felderzeugende Masse zurückgeführt werden
kann.
2.3 Ein Astronaut fühlt sich schwerelos, weil in einem frei fallenden System nie eine Gravitationsfeldstärke messbar ist.
2.4 Die Erde ist ein frei fallendes Bezugssystem. Aeussere Gravitationsfelder werden durch den Fall bis auf einen kleinen Rest (Gezeitenfeld)
wegtransformiert. Deshalb kann die Gravitationsfeldstärke der Sonne
auf der Erde keine Wirkung hervorrufen.
2.5 Das Gezeitenfeld wird durch die Inhomogenität des äusseren Gravitationsfeldes hervorgerufen. Der Mond hat eine grössere Gezeitenwirkung als die Sonne, weil sein Feld im Gebiet der Erde absolut gemessen
inhomogener ist.
3.1 Der zweite Term von Formel (6) kann in eine zu (5) analoge Matrix
verwandelt werden, wenn der momentane Winkel (w·t) durch einen um
90˚ grösseren (ω·t + π/2) ersetzt wird.
3.2 Der Faktor zwei im Ausdruck (9) weist darauf hin, dass diese Grösse
aus je einer Ableitung der beiden Summanden von Formel (6) besteht.
3.3 Die Geschwindigkeit ist gleich dem zweiten Ausdruck in Formel (7)
und die Beschleunigung gleich dem dritten Summanden in Formel (9).
4.1Die Zentrifugalkraft ist orts- und die Corioliskraft geschwindigkeitsabhängig.
4.2 Im Ruhessystem fährt das Motorrad mit einer Geschwindigkeit von
6.1 m/s und einer Beschleunigung von 7.43 m/s2 im Kreis herum. Die
Haftreibungskraft, die diese Beschleunigung verursacht, muss deshalb
einen Betrag von 891.4 N aufweisen. Im mitbewegten System fährt das
Motorrad nur mit 4 m/s und erfährt eine Beschleunigung von 3.2 m/s2.
Die für diese Beschleunigung notwendige, resultierende Kraft ist deshalb gleich 384 N. Die resultierende Kraft setzt sich aus der Coriolis(402.1 N), der Zentrifugal- (105.3 N) und der Haftreibungskraft (891.4
N) zusammen. Weil die Zentrifugal- und die Corioliskraft nach aussen
und die Haftreibungskraft nach innen weisen, erhält man den richtigen
Zahlenwert.
4.3 Vom Karussell aus gesehen läuft die Glühbirne mit der Relativgeschwindigkeit ω·r auf einer Kreisbahn. Die Glühbirne wird folglich gegen die Kreismitte zu beschleunigt. Um diese Zentralbeschleunigung zu
erzeugen, hätte die Zentrifugalkraft gerade den richtigen Wert, doch
zeigt sie leider nach aussen. Weil sich die Glühbirne
Rotationsmechanik
Seite 209