Theoretische und numerische Betrachtung partieller
Werbung

Theoretische und numerische
Betrachtung partieller
Differentialgleichungen mithilfe des
nichtkonformen Park-Sheen Elements
Diplomarbeit
Humboldt-Universität zu Berlin
Mathematisch-Naturwissenschaftliche Fakultät II
Institut für Mathematik
eingereicht von
Robert Altmann
geb.: am 17.02.1987 in Berlin
Betreuer: Prof. Dr. Carsten Carstensen
Berlin, 14. Dezember 2010
Inhaltsverzeichnis
Einleitung
1
Symbole
3
1 Funktionalanalytische
1.1 Definitionen . . . .
1.2 Spuren . . . . . . .
1.3 Einbettungssätze .
Grundlagen
. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . .
2 Allgemeine Abschätzungen
2.1 Quasiuniformität . . . . . . . . . . . . . . . .
2.2 Poincaré und Friedrichs Ungleichung . . . . .
2.3 Spur Ungleichungen . . . . . . . . . . . . . . .
2.3.1 Spur Identität . . . . . . . . . . . . . .
2.3.2 Zwei Spur Ungleichungen für Vierecke
2.4 Interpolationsfehlerabschätzung . . . . . . . .
3 Finite-Elemente-Methode
3.1 Schwache Formulierung . . . . . . . . . . .
3.2 Existenz und Eindeutigkeit von Lösungen .
3.3 Lösungsansätze . . . . . . . . . . . . . . .
3.3.1 Konforme Methoden . . . . . . . .
3.3.2 Beispiele konformer Methoden . . .
3.3.3 Nichtkonforme Methoden . . . . . .
3.3.4 Beispiele nichtkonformer Methoden
3.4 Gemischte Methoden . . . . . . . . . . . .
3.4.1 Brezzis Splitting Theorem . . . . .
3.4.2 Gemischte Methoden mit Strafterm
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
5
7
8
.
.
.
.
.
.
11
12
13
15
15
16
17
.
.
.
.
.
.
.
.
.
.
19
19
21
22
24
25
27
28
30
30
31
4 Park-Sheen Elemente
33
4.1 Nichtkonforme P1 -Elemente auf Vierecksgittern . . . . . . . . 34
i
INHALTSVERZEICHNIS
4.2
4.3
4.4
4.5
4.1.1 Diagonalregel . . . . . . . . . . .
4.1.2 Nodale Basisfunktion I . . . . . .
4.1.3 Nodale Basisfunktion II . . . . .
Kantenwege . . . . . . . . . . . . . . . .
Basis von P S(T ) . . . . . . . . . . . . .
Konsistente Dirichlet-Daten . . . . . . .
Approximationsoperator . . . . . . . . .
4.5.1 Abschätzung von kw − J wkH 1 (Q)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5 Fehleranalysis
5.1 Problemstellung . . . . . . . . . . . . . . . .
5.1.1 Schwache Formulierung . . . . . . . .
5.1.2 Schwache Formulierung im Diskreten
5.2 Existenz und Eindeutigkeit von Lösungen . .
5.3 A Priori Fehlerabschätzung . . . . . . . . .
5.3.1 Strang Lemma . . . . . . . . . . . .
5.3.2 Approximationsfehler . . . . . . . . .
5.3.3 Konsistenzfehler . . . . . . . . . . . .
5.3.4 Resultat . . . . . . . . . . . . . . . .
5.4 A Posteriori Fehlerschätzer . . . . . . . . . .
5.4.1 Gemischte Formulierung . . . . . . .
5.4.2 Inkonsistenz Residuum . . . . . . . .
5.4.3 Gleichgewichts Residuum . . . . . . .
5.4.4 Resultat . . . . . . . . . . . . . . . .
6 Numerische Beispiele
6.1 Bemerkungen zur Implementierung
6.2 Beispiel 1: Anisotrope Rechtecke . .
6.3 Beispiel 2: Geschichtetes Material .
6.4 Beispiel 3: Kanal mit Hindernis . .
6.5 Beispiel 4: Z-Shape . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
34
35
36
37
40
44
46
47
.
.
.
.
.
.
.
.
.
.
.
.
.
.
51
52
52
53
53
56
56
57
57
61
61
62
65
66
71
.
.
.
.
.
73
73
74
76
78
80
Zusammenfassung und Ausblick
83
Literaturverzeichnis
85
ii
Einleitung
Randwertprobleme partieller Differentialgleichungen (part. Dgln.) spielen eine große Rolle im Bereich der Naturwissenschaften, da diese Prozesse und
Phänomene der Natur, wie die Erhaltungssätze der Physik, beschreiben. So
können wir beispielsweise Wärmeleitung modellieren, wobei Randdaten die
Temperatur (am Dirichlet-Rand) oder Wärmequellen (am Neumann-Rand)
vorgeben. Wir werden uns mit allgemein elliptischen part. Dgln. zweiter Ordnung beschäftigen. Das einfachste Beispiel stellt das Poisson-Problem dar,
dem stationären Zustand der Wärmeleitungsgleichung.
Part. Dgln. lassen sich nur selten elementar lösen, sodass wir auf numerische Verfahren angewiesen sind. Für elliptische part. Dgln. eignet sich dabei besonders die Methode der finiten Elemente. Ziel dieser Arbeit ist die
Verallgemeinerung der Park-Sheen Elemente ([Par03], [PS03]), einer speziellen Form der nichtkonformen Finite-Elemente-Methode. Dabei betrachten
wir beliebige Partitionen in Drei- und konvexe Vierecke und stückweise affine Funktionen, die stetig in den Kantenmittelpunkten verbunden sind. Die
Verallgemeinerung bietet auch die Möglichkeit von Vierecksgittern auf mehrfach zusammenhängenden Gebieten. Diese treten zum Beispiel bei der Modellierung einer Strömung durch einen Kanal mit Hindernis auf ([Gra03],
[GHT04]).
Die Arbeit setzt sich wie folgt zusammen. Das erste Kapitel beschäftigt sich
mit den Grundlagen der Funktionalanalysis, die zum Verständnis schwacher
Lösungen von partiellen Differentialgleichungen und der Finite-ElementeMethode nötig sind. Im Mittelpunkt stehen die Sobolev-Räume sowie deren
Zusammenhänge und Eigenschaften.
Die angestrebten Fehlerabschätzungen für Park-Sheen Elemente sind nur
möglich, wenn die verwendeten Elemente einer Partition nicht degenerieren.
So müssen beispielsweise Innenwinkel beschränkt werden, da diese kritisch
in Konstanten auftreten. Kapitel 2 beinhaltet solche Überlegungen und trägt
1
grundlegende Abschätzungen zusammen. Neben der Poincaré und Friedrichs
Ungleichung stehen vor allem Spur Ungleichungen und die darin enthaltenen
Konstanten im Fokus der Betrachtung.
Kapitel 3 bietet einen Einstieg in die Methode der finiten Elemente. Diese ist
so effektiv und flexibel, da sie auf die Variationsformulierung zugeschnitten
ist. So können wir auch part. Dgln. lösen, die gar keine Lösungen im klassischen Sinne, sondern nur schwache Lösungen besitzen. Die Idee der FiniteElemente-Methode ist, das gegebene Problem so umzuwandeln, dass es ein
Computer lösen kann. Dazu ist eine Diskretisierung des Problems von Nöten.
Wir werden endlich-dimensionale (Unter-)Räume betrachten und das gegebene Problem schließlich in ein (möglicherweise sehr großes) lineares Gleichungssystem umwandeln.
Die bereits oben erwähnten Park-Sheen Elemente stellen wir schließlich in
Kapitel 4 vor. Wir werden zeigen, dass für die Verallgemeinerung auf mehrfach zusammenhängende Gebiete, eine neue Art von Basisfunktionen benötigt
wird. Mit der Einführung eines Approximationsoperators gehen wir über zum
Kapitel der Fehleranalysis. Diesen Operator werden wir sowohl bei den a priori als auch bei den a posteriori Abschätzungen verwenden und muss daher
genau analysiert werden.
Zum Ende der Arbeit wenden wir die in Kapitel 5 hergeleiteten Fehlerabschätzungen auf einige Beispiele an. Das erste Beispiel beschäftigt sich
dabei mit der a priori Abschätzung auf anisotropen Rechtecks-Gittern. Es
folgt die Untersuchung des in Kapitel 5 entwickelten Fehlerschätzers. Dazu
betrachten wir als Beispiel geschichtetes Material und dessen Homogenisierung für den Grenzfall, wenn die Schichtdicke gegen Null geht. Schließlich betrachten wir noch Anwendungen der Park-Sheen Elemente auf einem mehrfach zusammenhängenden Gebiet, einem Kanal mit Hindernis, sowie einer
gemischten Partition aus Drei- und Vierecken, dem Z-Shape.
Ich danke Professor Carstensen für seine investierte Zeit und Unterstützung,
die frühzeitige Förderung sowie die Möglichkeit, in der Arbeitsgruppe der
numerischen Analysis zu arbeiten.
Für die Finanzierung meines Studiums danke ich meinen Eltern sowie der
KKGS-Stiftung, die mich seit Januar 2010 fördert. Weiterhin danke ich dem
ERASMUS Programm, dem DAAD, der Yonsei Universität und vor allem
der BMS, die mir die Auslandsaufenthalte in Bordeaux, Seoul und Hanoi
ermöglichten.
2
Symbole
Du
∇u
∇N C u
div u
γu
supp(u)
fflconv{A, B}
u dx
diam(M)
|·|
(schwache) Ableitung von u
(schwacher) Gradient von u
stückweiser Gradient von u
Divergenz von u
Spur von u
Träger von u, supp(u) = {x ∈ Rn | u(x) 6= 0}
konvexe Hülle von A und
´ B
ffl
Integralmittel von u, Ω u dx = |Ω| Ω u dx
Durchmesser von M
Betrag, Lebesgue-Maß oder Mächtigkeit
IC
IN C
J
nodaler Interpolationsoperator
nichtkonformer Interpolationsoperator
Approximationsoperator für Park-Sheen Elemente
Ω
∂Ω
ΓD
ΓN
ωz
ωE
ωT
beschränktes Gebiet, meist in R2
Rand von Ω
Dirichlet-Rand
Neumann-Rand
Knotenpatch, Träger der Hutfunktion ϕz
Kantenpatch, Vereinigung der beiden angrenzenden Elemente
Elementpatch, Vereinigung angrenzender Elemente
T
T 4 (z)
N
N (M)
E
E(M)
ED
E(z)
reguläre Partition
Menge der Vierecke mit Knoten z
Knoten einer Partition T
Knoten einer Partition T , die in der Menge M liegen
Kanten einer Partition T
Kanten einer Partition T , die in der Menge M liegen
Kanten des Dirichlet-Randes
Kanten mit Endpunkt z
3
hE
hT
hmax
h
Länge einer Kante E ∈ E
Durchmesser eines Elementes T ∈ T
maximaler Durchmesser aller Elemente einer Partition T
L∞ -Funktion mit lokalen Netzweiten, h|T = hT
ν
νE
τ
äußerer Normaleneinheitsvektor
Normaleneinheitsvektor zur Kante E
Tangenteneinheitsvektor
W k,p(Ω)
H k (Ω)
1
HD
(Ω)
1
H0 (Ω)
H(div; Ω)
Sobolev-Raum der Ordnung k, p
Sobolev-Raum k-ter Ordnung, H k (Ω) := W k,2(Ω)
Sobolev-Raum erster Ordnung mit Nullrandbedingung auf ΓD
Sobolev-Raum erster Ordnung mit Nullrandbedingung auf ∂Ω
Raum der L2 -Funktionen in mehreren Komponenten, deren
Divergenz in L2 liegt.
Raum der stetigen Funktionen auf Ω
Raum der glatten Funktionen mit kompakten Träger in Ω
C(Ω)
Cc∞ (Ω)
Pk (T )
Qk (T )
P1 Q1 (T )
CR1 (T )
1
CRD
(T )
P S(T )
P S0(T )
Raum der elementweisen Polynome vom Grad k bzgl. T
Raum der elementweisen Polynome vom part. Grad k bzgl. T
Raum der global stetigen und lokal linear bzw.
bilinearen Funktionen.
Raum der Crouzeix-Raviart Elemente bzgl. T
Raum der Crouzeix-Raviart Elemente bzgl. T mit
Nullrandbedingung bei mid(E(ΓD ))
Raum der Park-Sheen Elemente bzgl. T
Raum der Park-Sheen Elemente bzgl. T mit Nullrandbedingung bei mid(E(∂Ω))
k · kL2 (Ω)
| · |H 1 (Ω)
| · |N C
||| · |||
||| · |||N C
L2 -Norm auf Ω
H 1 -Halbnorm auf Ω, | · |H 1 (Ω) := k∇ · kL2 (Ω)
gebrochene H 1 -Halbnorm
:= a(·, ·)1/2
:= aN C (·, ·)1/2
Res
η
h.o.t.
osc(f )
osc(f, {ωz })
C(α)
Residuum
Fehlerschätzer
Terme höherer Ordnung
elementweise Oszillationen von f bzgl. T
Oszillationen von f bzgl. {ωz }
2
positive Konstante, C(α)2 = 1/4+2/π
1−| cos α|
4
Kapitel 1
Funktionalanalytische
Grundlagen
Um partielle Differentialgleichungen mithilfe der Finite-Elemente-Methode
zu lösen, benötigt man die sogenannte schwache Formulierung des Problems.
Als Vorbereitung für die folgenden Kapitel betrachten wir in diesem Abschnitt Begriffe wie die schwache Ableitung und führen die Sobolev-Räume
ein. Die Betrachtung von Sobolev-Räumen auf Rändern eines Gebietes und
die Einbettungssätze von Sobolev, Rellich und Kondrachov werden diesen
Abschnitt abschließen.
Grundlage des Kapitels bilden die Bücher von Alt [Alt92] und Evans [Eva98].
1.1
Definitionen
Dieser Abschnitt trägt Definitionen und Eigenschaften von Sobolev-Räumen
zusammen. Motiviert durch die Formel der partiellen Integration für Funktionen in C 1 (Ω), definieren wir mithilfe von Testfunktionen die schwache
Ableitung.
Definition 1.1 (schwache Ableitung)
Sei Ω ⊂ Rn , u ∈ L1loc (Ω) und α ein Multiindex, α ∈ Nn . Dann heißt v ∈
L1loc (Ω) die α-schwache Ableitung von u, geschrieben als
D α u = v,
falls
ˆ
|α|
α
uD ϕ dx = (−1)
Ω
für alle Testfunktionen ϕ ∈ Cc∞ (Ω).
5
ˆ
vϕ dx
Ω
KAPITEL 1. FUNKTIONALANALYTISCHE GRUNDLAGEN
Bemerkung 1.2
Existiert die α-schwache Ableitung von u, so ist diese bis auf LebesgueNullmengen eindeutig bestimmt. Existiert sogar die klassische Ableitung, so
stimmt diese mit der schwachen überein.
Definition 1.3 (Sobolev-Raum)
Zu 1 ≤ p ≤ ∞, k ∈ N und Ω ⊂ Rn ist der Sobolev-Raum W k,p(Ω) definiert als
der Raum der lokal integrierbaren Funktionen u : Ω → R mit der Eigenschaft,
dass für jeden Multiindex α ∈ Nn mit |α| ≤ k, die schwache Ableitung D α u
existiert und in Lp (Ω) liegt. Zu u ∈ W k,p(Ω), p < ∞, gehört die Norm
1/p
Xˆ
kukW k,p(Ω) :=
|D αu|p dx .
|α|≤k
Für p = ∞ gilt entsprechend
kukW k,∞(Ω) :=
X
|α|≤k
Ω
ess supΩ |D α u|.
Bemerkung 1.4 (Kapitel 5 in [Eva98])
(a) Den Raum W k,p (Ω) kann man auch über den Abschluss von C ∞ (Ω)
bezüglich der Norm k · kW k,p (Ω) definieren. Demnach liegt C ∞ (Ω) dicht in
W k,p(Ω). Ist ∂Ω in C 1 , so liegt sogar C ∞ (Ω) dicht in W k,p(Ω).
(b) Für alle 1 ≤ p ≤ ∞ und k ∈ N ist W k,p(Ω) ein Banachraum.
(c) Für den Fall p = 2 schreiben wir auch
H k (Ω) := W k,2(Ω).
Die Bezeichnung resultiert aus der Eigenschaft, dass es sich bei H k (Ω) um
Hilberträume handelt.
Definition 1.5 (Sobolev-Halbnorm)
Zu Ω ⊂ Rn und k ∈ N, k > 0, sei | · |H k (Ω) die Halbnorm
1/2
Xˆ
| · |H k (Ω) :=
|D α · |2 dx = kD k · kL2 (Ω) .
|α|=k
Ω
Definition 1.6 (H(div; Ω))
H(div; Ω) definiert den Raum der L2 -Funktionen auf Ω ⊂ Rn in n Komponenten, deren Divergenz auch wieder in L2 (Ω) liegt,
H(div; Ω) := {v ∈ [L2 (Ω)]n | div v ∈ L2 (Ω)}.
6
1.2. SPUREN
Bemerkung 1.7 (Aufgabe II.5.14 in [Bra07])
Sei Ω ⊂ Rn . Eine stückweise polynomiale Funktion v ∈ [L2 (Ω)]n liegt genau
dann in H(div; Ω), wenn die Komponente in Richtung der Normalen v · ν an
allen Elementgrenzen stetig ist.
1.2
Spuren
In diesem Abschnitt geht es um die Frage, wann der Begriff des Randwertes sinnvoll ist. Dies ist wichtig, um die partielle Integration für schwach
differenzierbare Funktionen zu definieren. Funktionen in C(Ω) besitzen beispielsweise Randdaten im klassischen Sinne, L2 Funktionen dagegen sind nur
bis auf Nullmengen definiert, sodass es keinen Sinn macht von Randwerten
zu sprechen.
Satz 1.8 (Spuroperator)
Sei Ω ein beschränktes Lipschitz-Gebiet. Dann gibt es genau eine stetige lineare Abbildung
γ : W 1,p (Ω) → Lp (∂Ω),
sodass für Funktionen u ∈ W 1,p (Ω) ∩ C(Ω), γu = u|∂Ω gilt.
Beweis. Siehe Anhang 5 in [Alt92].
Bemerkung 1.9
(a) Integrieren wir im Folgenden eine Funktion u ∈ W 1,p (Ω) über den Rand
∂Ω, so wird eigentlich γu integriert.
(b) Die Spur einer H 1 (Ω)-Funktion besitzt sogar mehr Regularität als L2 (∂Ω).
Den Raum der Spuren von H 1 (Ω)-Funktionen bezeichnet man auch als H 1/2 (∂Ω).
Eine allgemeine Definition von Sobolev-Räumen gebrochener Ordnung, das
heißt k ∈
/ N, findet man in Kapitel 7 von [AF03].
(c) Da γ eine stetige lineare Abbildung ist, existiert eine Konstante Cspur mit
kγukL2 (∂Ω) ≤ Cspur kukH 1 (Ω)
für alle u ∈ H 1 (Ω).
Mit dem Spuroperator können wir nun Sobolev-Räume mit Randwerten definieren. Diese sind immer im Sinne der Spur und nicht punktweise zu verstehen.
7
KAPITEL 1. FUNKTIONALANALYTISCHE GRUNDLAGEN
1
Definition 1.10 (HD
(Ω), H01 (Ω))
Zum Dirichlet-Rand ΓD ⊆ ∂Ω mit positiven Lebesgue-Maß sei
1
HD
(Ω) := {v ∈ H 1 (Ω)| v|ΓD = 0}.
Im Fall ΓD = ∂Ω schreibt man auch H01 (Ω).
Bemerkung 1.11
(a) Im Fall |ΓD | > 0, d.h. der Dirichlet-Rand hat positives Lebesgue-Maß,
1
ist HD
(Ω) ein abgeschlossener Unterraum von H 1 (Ω).
(b) Man kann H01 (Ω) auch als Abschluss von Cc∞ (Ω) mit entsprechender
Norm definieren.
Definition 1.12 (H −1 (Ω))
Den Dualraum zu H01 (Ω) bezeichnet man als H −1(Ω). Die dazugehörige Norm
ist definiert durch
´
f v dx
hf, vi
Ω
kf kH −1 (Ω) :=
sup
:=
sup
.
v∈H01 (Ω)\{0} kvkH 1 (Ω)
v∈H01 (Ω)\{0} kvkH 1 (Ω)
Satz 1.13 (partielle Integration)
Für Funktionen u, v ∈ H 1(Ω) mit beschränktem Lipschitz-Gebiet Ω ⊂ Rn
und äußerem Normaleneinheitsvektor ν = (ν1 , . . . , νn )t gilt
ˆ
ˆ
ˆ
(∂j u)v dx = − u(∂j v) dx +
uvνj dx.
Ω
1.3
Ω
∂Ω
Einbettungssätze
Wir beschäftigen uns nun mit Einbettungen zwischen verschiedenen SobolevRäumen und Einbettungen der Sobolev-Räume in den Raum der stetigen
Funktionen.
Definition 1.14 (kompakte Einbettung)
Eine Einbettung vom Raum X in den Raum Y heißt kompakt, falls das Bild
jeder schwach konvergierenden Folge in X stark in Y konvergiert.
Wir betrachten nun jeweils für uns ausreichende Spezialfälle der Sätze von
Sobolev, Rellich und Kondrachov. Zuerst stellen wir uns die Frage, wann
Funktionen u ∈ W k,p (Ω) stetig sind.
8
1.3. EINBETTUNGSSÄTZE
Satz 1.15 (Sobolev)
Sei Ω ⊂ Rn ein beschränktes Lipschitz-Gebiet. Gilt pk > n, so ist die Einbettung
W k,p(Ω) ֒→ C(Ω)
kompakt.
Beweis. Siehe Kapitel 5.6 in [Eva98].
Bemerkung 1.16
Im Grenzfall pk = n kann in manchen Fällen zumindest noch eine stetige
Einbettung gelten. So gilt beispielsweise für n = 1 die stetige Einbettung
W 1,1 (Ω) ֒→ C(Ω). Im Gegensatz dazu ist H 1 (Ω) in zwei Dimensionen nicht
stetig eingebettet in C(Ω), H 1 -Funktionen sind im zweidimensionalen Fall
also nicht stetig.
Als zweites betrachten wir Einbettungen zwischen Sobolev-Räumen nach
Rellich und Kondrachov. Einen Beweis findet man in Anhang 5 in [Alt92].
Satz 1.17 (Rellich, Kondrachov)
Sei Ω ⊂ Rn ein beschränktes Lipschitz-Gebiet, k ∈ N und p < ∞. Dann ist
die Einbettung
W k,p (Ω) ֒→ W k−1,p(Ω)
kompakt.
9
Kapitel 2
Allgemeine Abschätzungen
Im weiteren Verlauf, vor allem in Kapitel 5, werden viele Abschätzungen
benötigt, die wir hier zusammentragen. Kapitel 2.2 beschäftigt sich dabei
mit der Frage, wann man die L2 -Norm einer Funktion u mit der L2 -Norm
von ∇u abschätzen kann. Es folgen spezielle Spur Ungleichungen auf Dreiund Vierecken sowie eine Interpolationsfehlerabschätzung für den nodalen
Interpolationsoperator. Zuvor müssen wir uns allerdings mit der Form der
zugrunde liegenden Elemente beschäftigen.
Konvention 2.1 (., ≈)
Wir schreiben A . B, falls eine von lokalen Netzweiten unabhängige Konstante 0 < c < ∞ existiert mit
A ≤ cB
Gilt A . B und B . A, so schreiben wir auch A ≈ B.
Neben der Cauchy-Schwarz Ungleichung werden wir auch die Young Ungleichung verwenden, ohne dies explizit zu erwähnen. Letztere sei hier noch
einmal aufgeführt.
Lemma 2.2 (Young Ungleichung)
Für zwei reelle Zahlen a, b ∈ R und λ ∈ R, λ > 0 gilt
2ab ≤ a2 /λ + λb2 .
√
√
Beweis. Die Behauptung folgt direkt aus (a/ λ − b λ)2 ≥ 0.
11
KAPITEL 2. ALLGEMEINE ABSCHÄTZUNGEN
2.1
Quasiuniformität
Da wir uns mit Partitionen in Drei- und konvexe Vierecke beschäftigen werden, beschränken wir uns im Folgenden auf diese speziellen Gebiete. Die
Konstanten von Abschätzungen hängen teilweise kritisch von der Form des
Gebietes ab, sodass wir diese restringieren müssen. Für Partitionen in Dreiecke reicht es die Innenwinkel gleichmäßig von π weg zu beschränken, Partitionen in Vierecke hingegen benötigen weitere Einschränkungen.
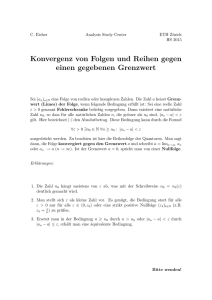
Min-Winkel Bedingung: Wir fordern, dass alle Innenwinkel ω die Eigenschaft ω ≥ ωmin für einen Winkel ωmin > 0 erfüllen.
ω0
ω0
ω0
β
Abbildung 2.1: Winkel Bedingungen: Für alle Innenwinkel gilt ω ≥ ω0 , obwohl der größte Innenwinkel β nicht gleichmäßig von π weg beschränkt ist.
Max-Winkel Bedingung: Im Gegensatz zu Partitionen in Dreiecke, impliziert die Min-Winkel Bedingung bei Vierecken nicht die Max-Winkel Bedingung, siehe Abbildung 2.1. Daher fordern wir die Existenz eines Winkels
ωmax < π mit ω ≤ ωmax für alle Innenwinkel ω einer Partition. Um die beiden
Bedingungen zu verbinden, definieren wir ω0 := min{ωmin, π − ωmax }.
Min-Max-Kanten-Quotient: Für Partitionen in Vierecke benötigen wir
sogar noch eine dritte Bedingung, um Degeneriertheit auszuschließen. Man
denke dabei an ein langgezogenes Rechteck, welches die beiden oberen Bedingungen mit ω0 = π/2 erfüllt. Daher führen wir eine obere Schranke für den
Quotienten der längsten und kürzesten Seite eines Vierecks ein. Es existiere
also ein positives κ mit
für alle Vierecke Q.
|längste Kante von Q|
≤κ
|kürzeste Kante von Q|
Diagonalen Bedingung: Mit θ0 werden wir die untere Schranke von Winkeln zwischen Diagonalen aller Vierecke bezeichnen. Degeneriert θ0 , so degeneriert auch ω0 oder κ, sodass die Existenz von θ0 keine neue Bedingung
darstellt. Allerdings vereinfacht dies die Struktur von Konstanten.
12
2.2. POINCARÉ UND FRIEDRICHS UNGLEICHUNG
2.2
Poincaré und Friedrichs Ungleichung
Wie bereits erwähnt, wollen wir die L2 -Norm einer Funktion durch dessen
H 1 -Halbnorm abschätzen. Offensichtlich ist dies nicht immer möglich: Jede
auf Ω konstante Funktion u erfüllt |u|H 1 (Ω) = 0 und kann somit keine obere
Schranke der L2 -Norm darstellen.
Satz 2.3 (Poincaré-Friedrichs Abschätzung)
Sei Ω ⊂ Rn ein beschränktes Lipschitz-Gebiet und | · |s : H 1 (Ω) → R eine
H 1 -stetige Halbnorm mit |1|s > 0. Dann gilt,
k · kH 1 (Ω) ≈ | · |H 1 (Ω) + | · |s .
Beweis. Die Abschätzung für & ist trivial, da beide Halbnormen auf der
rechten Seite H 1 -stetig sind. Angenommen, es existiert eine Folge (vj ) ∈
H 1 (Ω) mit kvj kH 1 (Ω) = 1 und |vj |H 1 (Ω) + |vj |s ≤ 1/j. Die Folge (vj ) ist
beschränkt in H 1 (Ω) und besitzt daher eine schwach konvergierende Teilfolge
(vjk ). Nach Satz 1.17 konvergiert diese stark in L2 (Ω), d.h. es existiert ein
v ∈ H 1(Ω) mit
(vjk ) → v in L2 (Ω)
und
(vjk ) ⇀ v in H 1(Ω).
Es gilt sogar starke Konvergenz in H 1 (Ω), da (vjk ) eine Cauchy-Folge in
L2 (Ω) ist und zusätzlich |vjk − vjℓ |H 1 (Ω) < 1/k + 1/ℓ gilt. Aus ∇(vjk ) → 0
folgt somit
∇v = 0,
also ist v fast überall konstant auf Ω. Die H 1 -Stetigkeit der Halbnorm | · |s
ergibt zusätzlich |vjk |s → |v|s und damit |v|s = 0. Somit gilt v = 0 und steht
im Widerspruch zu kvkL2 (Ω) = 1.
Aus Satz 2.3 folgen nun, mit geeigneter Wahl der Halbnorm | · |s , sowohl die
Poincaré als auch die Friedrichs Ungleichung.
Folgerung 2.4 (Poincaré Ungleichung)
ffl
Es sei u ∈ H 1 (Ω) und u das Integralmittel von u, d.h. u = Ω u dx. Dann
gilt
ku − ukL2 (Ω) . k∇ukL2 (Ω) = |u|H 1 (Ω) .
13
KAPITEL 2. ALLGEMEINE ABSCHÄTZUNGEN
Beweis. Mit der Halbnorm | · |s := |
k · kH 1 (Ω)
Aus
´
Ω
´
· dx| ergibt sich nach Satz 2.3,
ˆ
. | · |H 1 (Ω) + · dx .
Ω
Ω
u − u dx = 0 folgt die Behauptung.
Folgerung 2.5 (Friedrichs Ungleichung)
Es sei u ∈ H01 (Ω). Dann gilt
kukL2(Ω) . k∇ukL2 (Ω) = |u|H 1 (Ω) .
Beweis. In diesem Fall sei | · |s := k · kL2 (∂Ω) . Nach Bemerkung 1.9.(c) ist dies
eine H 1 -stetige Halbnorm und somit gilt die Behauptung.
Bemerkung 2.6
(a) Die Friedrichs Ungleichung gilt auch, wenn die Funktion nur auf Teilen
des Randes verschwindet, solange dieser Teil ein positives Lebesgue-Maß besitzt.
(b) Betrachten wir eine Partition des Gebietes Ω und eine stückweise H 1 Funktion mit entsprechenden Randbedingungen, dann gilt eine diskrete Friedrichs Ungleichung, siehe Satz 3.21
Die tatsächlichen Konstanten aus den vorherigen Folgerungen sind nur in
Spezialfällen bekannt. Im Fall der Poincaré Ungleichung nutzen wir das optimale Resultat für konvexe Gebiete nach Payne und Weinberger.
Satz 2.7 (Payne–Weinberger für konvexe Gebiete, [PW60])
Es sei Ω ⊂ R2 ein beschränktes und konvexes Lipschitz-Gebiet mit Durchmesser diam(Ω). Dann gilt für alle u ∈ H 1 (Ω) mit Integralmittel u die
Abschätzung
ku − ukL2 (Ω) ≤
diam(Ω)
k∇ukL2 (Ω) .
π
Folgerung 2.8 (1D Friedrichs Ungleichung)
Sei (a, b) ⊂ R ein Intervall und u ∈ H01 (a, b). Dann gilt
kukL2 (a,b) ≤
b−a ′
ku kL2 (a,b) .
π
14
(2.1)
2.3. SPUR UNGLEICHUNGEN
Beweis. Durch Vertauschung und Spiegelung konstruiert man eine Funktion g ∈ H 1 (a, b) mit kgkL2 (a,b) = kukL2 (a,b) , kg ′kL2 (a,b) = ku′kL2 (a,b) sowie
´b
g ds = 0. Die Behauptung folgt dann mit Satz 2.7
a
2.3
Spur Ungleichungen
Dieser Abschnitt beschäftigt sich mit Abschätzungen von Integralen über den
Rand eines Gebiets. Aus Bemerkung 1.9.(c) ist die Existenz einer Abschätzung
der Form
kγukL2 (∂Ω) . kukL2 (Ω)
bereits bekannt. In Hinblick auf die a priori Fehlerabschätzung in Kapitel 5,
sind wir nun an der involvierten Konstante interessiert.
2.3.1
Spur Identität
Die Grundlage vieler Spur Ungleichungen bildet die Spur Identität auf Dreiecken.
Lemma 2.9 (Spur Identität, [Car09])
Sei T = conv{P, E} ein Dreieck mit Knoten P und gegenüberliegender Kante
E. Dann gilt für alle f ∈ W 1,1(T ) die Identität
f ds =
E
f dx +
T
1
2
T
(x − P ) · ∇f dx
(2.2)
Beweis. Mit Normaleneinheitsvektor ν folgt aus dem Divergenzsatz
ˆ
ˆ
ˆ
ˆ
(x − P ) · νf ds =
div[(x − P )f ] dx = 2 f dx + (x − P ) · ∇f dx.
∂T
T
T
T
Dabei steht (x−P ) senkrecht auf ν für x ∈ ∂T \E. Auf E gilt (x−P )·ν = ρE ,
wobei ρE die Höhe des Dreiecks auf E bezeichnet. Division durch 2|T | =
ρE |E| ergibt die Behauptung.
Folgerung 2.10 (Spur Ungleichung, Dreieck)
Sei E eine Kante des Dreiecks T und f ∈ H 1 (T ). Dann gilt
kf k2L2 (E) ≤
|E|
kf kL2 (T ) kf kL2 (T ) + hT k∇f kL2 (T ) .
|T |
15
(2.3)
KAPITEL 2. ALLGEMEINE ABSCHÄTZUNGEN
Beweis. Die Behauptung folgt direkt aus Lemma 2.9 mit fˆ = f 2 ∈ W 1,1 (T ).
2.3.2
Zwei Spur Ungleichungen für Vierecke
Wir gehen nun über zu Vierecken und beschäftigen uns mit zwei speziellen
Spur Ungleichungen, die in Kapitel 5 benötigt werden.
Lemma 2.11 (Spur Ungleichung I)
Sei Q ein konvexes Viereck mit Durchmesser hQ und Konstanten ω0 , κ aus
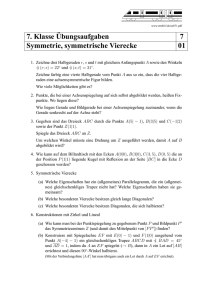
Kapitel 2.1. Ferner sei es, wie in Abbildung 2.2 zu sehen, durchffldie Diagonalen in vier Dreiecke unterteilt. Dann gilt für f ∈ H 1 (TE ) mit TE f dx = 0,
wobei TE das Dreieck mit der Kante E bezeichnet, die Abschätzung
kf k2L2 (E) ≤
8κ π + 1
hQ k∇f k2L2 (TE ) .
sin ω0 π 2
(2.4)
B
P
TE
α
E
A
Abbildung 2.2: Unterteilung eines Viereckes Q in vier Dreiecke. TE bezeichnet
das Dreieck mit Kante E.
Beweis. Mit Folgerung 2.10 angewandt auf TE , gilt zusammen mit der Poincaré Ungleichung nach Payne-Weinberger (Satz 2.7),
|E|
kf kL2 (TE ) (kf kL2 (TE ) + hTE k∇f kL2 (TE ) )
|TE |
|E| 2
1
1
≤
k∇f k2L2 (TE ) .
h
+
|TE | TE π 2 π
kf k2L2 (E) ≤
O.B.d.A. sei |AP | ≥ |BP | und damit 2|AP | ≥ hTE . Die Bedingungen der
Quasiuniformität ergeben für den Winkel α := ∠P AB die Abschätzung
sin α ≥
sin ω0
.
2κ
16
2.4. INTERPOLATIONSFEHLERABSCHÄTZUNG
Mit 2|TE | = |E||AP | sin α folgt dann die Behauptung.
Lemma 2.12 (Spur Ungleichung II)
Sei wieder Q ein konvexes Viereck mit Konstanten hQ , ω0 und κ.
ffl Dann gilt
2
für eine affine Funktion w ∈ P1 (Q) und m ∈ L (∂Ω), m|E := E w ds, die
Abschätzung
kw − mk2L2 (∂Q) ≤
κ
hQ k∇wk2L2 (Q) .
3 sin ω0
Beweis. Da ∇w auf Q konstant ist, gilt
2
X ˆ
∂w
2
2
ds
kw − mkL2 (∂Q) =
|x − mid(E)|
∂s
E
E∈E(Q)
X h2 ˆ ∂w 2
E
=
ds
12 E ∂s
E∈E(Q)
1
max h2 k∇wk2L2(∂Q)
12 E∈E(Q) E
1
|∂Q|
=
max h2E
k∇wk2L2 (Q) .
12 E∈E(Q)
|Q|
≤
Es seien a, b, c, d die Kantenlängen von Q, emax = maxE∈E(Q) hE deren Maximum und emin deren Minimum. Dann folgt
emax |∂Q| = emax (a + b + c + d) ≤ κ emin (a + b + c + d) ≤ |Q|
2.4
4κ
.
sin ω0
Interpolationsfehlerabschätzung
Viele Fehlerabschätzungen nutzen Approximationsoperatoren und benötigen
daher eine Abschätzung des dabei entstehenden Fehlers. Wir betrachten nun
den nodalen Interpolationsoperator IC aus Definition 3.16.
Lemma 2.13
Sei T = conv{P1 , P2 , P3 } ein Dreieck mit größtem Innenwinkel α, w ∈ H 2 (T )
und IC w dessen nodale Interpolation, d.h. IC w ist affin mit IC w(Pi) = w(Pi)
für i = 1, 2, 3. Dann gelten mit Durchmesser hT und Konstante
1/2
1/4 + 2/π 2
C(α) :=
1 − | cos α|
17
KAPITEL 2. ALLGEMEINE ABSCHÄTZUNGEN
die Abschätzungen
k∇(w − IC w)kL2 (T ) ≤ C(α)hT kD 2 wkL2 (T ) ,
p
kw − IC wkL2 (T ) ≤ 5/3 C(α)h2T kD 2 wkL2 (T ) .
(2.5)
(2.6)
Beweis. Den Beweis der Abschätzung (2.5) findet man in [Car08] auf Seite 85. Für die L2 -Abschätzung sei e := w − IC w. Mit der Spur Identität (2.2)
zu einer Kante E von T und der Young Ungleichung ergibt sich
|T |
kek2L2 (E) + hT kekL2 (T ) k∇ekL2 (T )
|E|
1
h2
|T |
kek2L2 (E) + kek2L2 (T ) + T k∇ek2L2 (T ) .
≤
|E|
2
2
kek2L2 (T ) ≤
Da e an den Endpunkten von E verschwindt, ist die Friedrichs Ungleichung
in einer Dimension aus Folgerung 2.8 verwendbar. Gefolgt von der Spur Ungleichung (2.3) gilt
2
|T |
|T | |E| 2
∂e kekL2 (E) ≤
2
|E|
π
∂s L2 (E)
≤
h2T
h3T
2
k∇ek
+
k∇ekL2 (T ) kD 2 ekL2 (T ) .
2
L (T )
π2
π2
Die beiden Rechnungen sowie die erste Behauptung (2.5) ergeben
1
h2
h3
h2
kek2L2 (T ) ≤ T2 k∇ek2L2 (T ) + T2 k∇ekL2 (T ) kD 2 wkL2 (T ) + T k∇ek2L2 (T )
2
π
π
2
C(α)2 C(α) C(α)2
≤
h4T kD 2 wk2L2 (T ) .
+
+
π2
π2
2
Die Konstante C(α) erfüllt die Eigenschaft 2/π ≤ C(α) und somit
C(α)2 C(α)2 C(α)2
5C(α)2
C(α)2 C(α) C(α)2
+
+
≤
+
+
≤
.
π2
π2
2
π2
2π
2
6
18
Kapitel 3
Finite-Elemente-Methode
Diese Einführung in die Finite-Elemente-Methode beschreibt den Übergang
von der klassischen Formulierung einer elliptischen Differentialgleichung zur
schwachen Formulierung und beschäftigt sich mit möglichen Lösungsansätzen.
Die schwache Formulierung, auch Variationsformulierung genannt, hat dabei
die Form
a(u, v) = F (v).
Dabei suchen wir zu einem Funktionenraum V ein Element u ∈ V , sodass
die Gleichung für alle v ∈ V erfüllt ist. Für die Existenz und Eindeutigkeit
von Lösungen werden wir Verallgemeinerungen des Rieszschen Darstellungssatzes betrachten. Um numerische Lösungen zu berechnen, konstruieren wir
neue Probleme ähnlicher Form auf endlich-dimensionalen Räumen Vh . Hier
stellen wir konkrete konforme und nichtkonforme Ansätze vor. Schließlich
betrachten wir noch den Ansatz der gemischten Finite-Elemente-Methode,
die es ermöglicht, Nebenbedingungen zu involvieren.
Da es sich um eine Einführung handelt, beschränken wir uns am DirichletRand auf Nullrandbedingungen. Allgemeine Dirichlet-Randbedingungen betrachten wir dann in Kapitel 5. Grundlage des Kapitels bilden die Bücher
von Braess [Bra07] und Brenner, Scott [BS08].
3.1
Schwache Formulierung
Als einführendes Beispiel betrachten wir die Poisson-Gleichung mit gemischten Randdaten. Dazu sei Ω ⊂ R2 ein beschränktes Lipschitz-Gebiet mit polygonalem Rand. Ferner sei ∂Ω zusammengesetzt aus dem Dirichlet-Rand ΓD ,
wobei |ΓD | > 0 gilt, und dem Neumann-Rand ΓN := ∂Ω \ ΓD . Zu gegebenen
19
KAPITEL 3. FINITE-ELEMENTE-METHODE
und hinreichend glatten Daten f und g lautet das Randwertproblem
− div(∇u) = f in Ω,
u = 0 auf ΓD ,
∇u · ν = g auf ΓN .
(3.1)
Dabei bezeichnet ν den äußeren Normaleneinheitsvektor. Diese Darstellung
wird auch klassische Formulierung genannt und Lösungen von (3.1) sind notwendigerweise zweimal differenzierbar. Für den Übergang zur schwachen Formulierung (Variationsformulierung) multiplizieren wir die erste Gleichung in
1
(3.1) mit einer beliebigen Testfunktion v ∈ HD
(Ω). Anschließend wird über
Ω integriert und die Formel der partiellen Integration nach Satz 1.13 angewandt,
ˆ
ˆ
f v dx = − div(∇u)v dx
Ω
ˆ Ω
ˆ
=
∇u · ∇v dx −
gv ds.
Ω
ΓN
1
1
Mit der Bilinearform a : HD
(Ω) × HD
(Ω) → R, definiert durch
ˆ
a(u, v) :=
∇u · ∇v dx,
(3.2)
Ω
1
und der linearen Abbildung F : HD
(Ω) → R,
ˆ
ˆ
F (v) :=
f v dx +
Ω
gv dx
(3.3)
ΓN
erhalten wir die schwache Formulierung von (3.1): Finde zu f ∈ L2 (Ω) und
1
1
g ∈ L2 (ΓN ) ein u ∈ HD
(Ω), sodass für alle v ∈ HD
(Ω)
a(u, v) = F (v)
gilt.
Bemerkung 3.1
Im Gegensatz zur starken Formulierung, wo die Randdaten punktweise gelten, sind die Randwerte in der schwachen Formulierung nur im Sinne der Spur
1
zu verstehen. Die Dirichlet-Daten sind durch die Wahl des Raumes HD
(Ω)
festgelegt.
20
3.2. EXISTENZ UND EINDEUTIGKEIT VON LÖSUNGEN
3.2
Existenz und Eindeutigkeit von Lösungen
Wir betrachten nun eine allgemeine Variationsformulierung mit Bilinearform
a : V ×V → R und linearer Abbildung F : V → R zu einem Funktionenraum
V . Gesucht ist ein u ∈ V , sodass für alle v ∈ V
a(u, v) = F (v)
(3.4)
gilt. Eine Antwort auf die Frage nach der Existenz und Eindeutigkeit von
Lösungen des Variationsproblems gibt das Lax-Milgram Lemma.
Satz 3.2 (Lax-Milgram)
Sei V ein Hilbertraum mit Norm k·kV . Sei außerdem a eine stetige und elliptische Bilinearform, d.h. es existieren positive Konstanten α und C, sodass
für alle u, v ∈ V
a(u, v) ≤ CkukV kvkV
und αkuk2V ≤ a(u, u)
gilt. Dann existiert zu jedem stetigen linearen Funktional F ∈ V ∗ genau ein
u ∈ V , sodass für alle v ∈ V ,
a(u, v) = F (v).
Beweis. Siehe Kapitel 2 in [BS08].
Beispiel 3.3
Die Bilinearform a aus (3.2) für die Poisson-Gleichung erfüllt die Bedingun1
gen des Satzes von Lax-Milgram zu V = HD
(Ω), falls |ΓD | > 0. Die Stetigkeit
mit C = 1 gilt nach Cauchy-Schwarz Ungleichung, die Elliptizität folgt aus
der Friedrichs Ungleichung, siehe Folgerung 2.5. Dass F aus (3.3) in V ∗ liegt,
folgt mithilfe einer Spur Ungleichung.
Der Satz von Lax-Milgram gilt auch in allgemeinerer Form, ohne die Elliptizität der Bilinearform a und mit unterschiedlichen Hilberträumen X und Y .
Stattdessen muss eine sogenannte inf-sup Bedingung gelten.
Satz 3.4 (Existenz und Eindeutigkeit von Lösungen)
Seien X und Y zwei Hilberträume und a eine stetige Bilinearform a : X ×
Y → R, die die inf-sup Bedingung
α=
a(x, y)
x∈X\{0} y∈Y \{0} kxkX kykY
inf
sup
21
KAPITEL 3. FINITE-ELEMENTE-METHODE
für ein α > 0 erfüllt. Zusätzlich sei a nicht-degeneriert, d.h.
∀y ∈ Y, y 6= 0 ∃x ∈ X :
a(x, y) 6= 0.
Dann liefert die Abbildung A : X → Y ∗ , definiert durch
A(x) := a(x, ·),
einen Isomorphismus. Zu jedem F ∈ Y ∗ existiert demnach genau ein x ∈ X
mit a(x, y) = F (y) für alle y ∈ Y .
Beweis. Siehe Kapitel 4 in [Car09].
3.3
Lösungsansätze
Die Finite-Elemente-Methode löst (3.4) im Allgemeinen nicht exakt in V ,
sondern in einem endlich-dimensionalen Raum Vh . Dadurch reduziert sich
das Problem auf das Lösen eines (möglicherweise großen) Gleichungssystems.
Handelt es sich bei Vh um einen Teilraum von V , so nennen wir es eine konforme Methode. Andernfalls nennen wir sie nichtkonform. Im nichtkonformen Fall ist nicht gewährleistet, dass die Bilinearform a auf Vh überhaupt
definiert ist. Das Variationsproblem (3.4) wird durch das diskrete Problem
ersetzt: Finde zur Bilinearform ah und dem Funktional Fh ein uh ∈ Vh , sodass
für alle vh ∈ Vh gilt
ah (uh , vh ) = Fh (vh ).
(3.5)
Die erhaltene Lösung uh nennen wir diskrete Lösung. Zudem nehmen wir im
Folgenden an, dass sowohl ah als auch Fh auf V definiert sind.
Definition 3.5 (Steifigkeitsmatrix)
Sei N = dim(Vh ) und (ϕ1 , . . . , ϕN ) eine Basis von Vh . Dann ist die Steifigkeitsmatrix A ∈ RN ×N gegeben durch die Einträge
Ai,j := a(ϕi , ϕj )
für alle i, j = 1, . . . , N. A ist demnach die zur Bilinearform a gehörige Matrix
bzgl. (ϕ1 , . . . , ϕN ). Weiter sei der Vektor b ∈ RN definiert durch
bi := F (ϕi )
für alle i = 1, . . . , N. Dieser wird auch als rechte Seite bezeichnet.
22
3.3. LÖSUNGSANSÄTZE
Erfüllen ah und Fh die Voraussetzungen von Satz 3.2 auf dem Raum Vh ,
dann ist (3.5) eindeutig lösbar und die Steifigkeitsmatrix ist symmetrisch
und positiv definit (und damit regulär). Die Lösung des Gleichungssystems
Ax = b
liefert dann die diskrete Lösung durch
uh =
N
X
xi ϕi .
i=1
Bemerkung 3.6
Ist das entstandene Gleichungssystem sehr groß, so sind wir beim Lösen auf
Iterationsverfahren angewiesen. Da A symmetrisch ist, eignet sich das cgVerfahren, siehe Kapitel 9 in [AK08]. Die Genauigkeit der Näherungslösung
hängt dabei kritisch von der Konditionszahl der Matrix ab. Außerdem sollte
die Steifigkeitsmatrix dünn besetzt sein. Dies werden wir erreichen, indem
wir Basisfunktionen (ϕ1 , . . . , ϕN ) wählen, die nur lokale Träger besitzen.
Grundlage für den Raum Vh wird stets eine Triangulierung bzw. Partition des
Gebietes Ω sein. Wir wollen unter anderem hängende Knoten ausschließen
und folgen der Definition von P. Ciarlet, siehe Kapitel 2 in [Cia78].
Definition 3.7 (reguläre Triangulierung/Partition)
Sei Ω ⊂ R2 ein beschränktes Lipschitz-Gebiet mit polygonalem Rand und sei
ΓD der abgeschlossene Dirichlet-Rand. Eine Unterteilung T von Ω in endlich
viele Drei- und konvexe Vierecke heißt reguläre Triangulierung/Partition von
Ω, falls
S
S
a) T := K∈T K = Ω,
b) für alle K ∈ T ist K abgeschlossen und int(K) nicht leer,
c) für K1 , K2 ∈ T , K1 6= K2 gilt int(K1 ) ∩ int(K2 ) = ∅,
d) jede Kante eines Elementes K ∈ T ist entweder eine Teilmenge von
∂Ω oder eine Kante eines anderen Elementes aus T ,
e) für alle K ∈ T ist K ∩ ΓD leer, ein Knoten oder eine Kante.
Bemerkung 3.8
Wir werden meist den Begriff der Partition verwenden. Den Begriff der Triangulierung benutzen wir nur, wenn alle verwendeten Elemente Dreiecke sind.
23
KAPITEL 3. FINITE-ELEMENTE-METHODE
Definition 3.9 (N , E, ED , freie Knoten)
N bezeichnet die Menge aller Knoten einer Partition T , E die Menge aller
Kanten. Des Weiteren seien N (M) und E(M), zu einer offenen oder abgeschlossenen Menge M mit |M| =
6 0, definiert durch
N (M) := N ∩ M,
E(M) := E ∩ M.
Die Menge der Dirichlet-Kanten wird definiert durch ED := E(ΓD ), die Knoten in N \ N (ΓD ) heißen freie Knoten.
3.3.1
Konforme Methoden
Wir beschäftigen uns nun mit dem Fall, dass der diskrete Raum Vh eine Teilmenge von V bildet. Die resultierende konforme Finite-Elemente-Methode ist
eine spezielle Galerkin Methode. Wir erhalten die Galerkin-Orthogonalität,
welche das wesentliche Werkzeug für Fehlerabschätzungen darstellt.
Lemma 3.10 (Galerkin-Orthogonalität)
Sei u ∈ V die Lösung des Variationsproblems (3.4) und uh ∈ Vh die diskrete
Lösung von (3.5). Dann steht der Fehler e := u − uh bezüglich a senkrecht
auf Vh , d.h. für alle vh ∈ Vh gilt
a(e, vh ) := a(u − uh , vh ) = 0.
(3.6)
Beweis. Da Vh ⊂ V , F = Fh und a = ah , gilt mit (3.4) und (3.5)
a(e, vh ) = a(u, vh ) − a(uh , vh ) = F (vh ) − F (vh ) = 0.
Häufig schätzt man den Fehler e bezüglich ||| · ||| := a(·, ·)1/2 ab. Handelt es
sich bei ||| · ||| um eine Norm, so nennt man diese Energienorm. Mithilfe der
Elliptizität von a erhalten wir daraus eine Abschätzung in der V -Norm.
Satz 3.11 (Céa-Lemma)
Sei wieder u ∈ V die exakte und uh ∈ Vh die diskrete Lösung des Variationsproblems. Erfüllt die Bilinearform a die Voraussetzungen von Satz 3.2, dann
gilt für den Fehler u − uh die quasioptimale Abschätzung
ku − uh kV ≤
C
inf ku − vh kV .
α vh ∈Vh
24
3.3. LÖSUNGSANSÄTZE
Beweis. Für ein beliebiges vh ∈ Vh gilt mit der Elliptizität bzgl. k · kV , der
Galerkin-Orthogonalität sowie der Stetigkeit von a,
αkek2V ≤ a(e, e) = a(e, u − vh ) ≤ CkekV ku − vh kV .
Division durch αkekV und das Bilden des Infimums liefert die Behauptung.
Ist die Bilinearform a nicht elliptisch, erfüllt jedoch eine inf-sup Bedingung
wie in Satz 3.4, so erhalten wir eine analoge Abschätzung.
Satz 3.12 (Fehlerabschätzung)
Seien u ∈ V und uh ∈ Vh die exakte und diskrete Lösung von (3.4) bzw.
(3.5). Erfüllt a die Voraussetzungen von Satz 3.4 mit X = Y = Vh , so gilt
C
inf ku − vh kV .
ku − uh kV ≤ 1 +
α vh ∈Vh
Beweis. Siehe Seite 215 in [Car09].
3.3.2
Beispiele konformer Methoden
Dieser Abschnitt beschäftigt sich mit speziellen Ansätzen für den Raum Vh
1
zu V = HD
(Ω). Oft wählt man hier stückweise Polynome, wobei stückweise“
”
bezüglich einer Partition zu verstehen ist. Dadurch erreicht man das Ziel der
lokalen Träger, siehe Bemerkung 3.6. Der erste Schritt besteht daher in der
Wahl einer regulären Partition zum beschränkten Lipschitz-Gebiet Ω nach
Definition 3.7.
Definition 3.13 (stückweise Polynomräume Pk , Qk )
Zu einer regulären Partition T sei der Raum der stückweisen Polynome k-ten
Grades definiert durch
Pk (T ) := {v ∈ L2 (Ω)| ∀K ∈ T : v|K ist Polynom k-ten Grades}.
Analog wird der Raum der stückweisen Polynome mit partiellem Grad k definiert,
Qk (T ) := {v ∈ L2 (Ω)| ∀K ∈ T : v|K ist homogenes Polynom k-ten Grades}.
25
KAPITEL 3. FINITE-ELEMENTE-METHODE
Das Céa Lemma besagt, wie wichtig die Wahl von Vh ist. Daher liegt die Vermutung nahe, bessere Approximationen durch Erhöhung des Polynomgrads
zu erreichen. Da die zu approximierende exakte Lösung u im Allgemeinen
Regularität zum Rand hin verliert, ist dies nicht immer der richtige Weg.
Daher werden wir nur die Räume P1 (T ) und Q1 (T ) betrachten. Bessere Approximationen werden dann durch Verfeinerung der Partition erzielt.
Zu gegebener Partition T = T 3 ∪ T 4 in Dreiecke (T 3 genannt) und konvexe
Vierecke (T 4 genannt), definieren wir nun den Raum der global stetigen und
lokal linear bzw. bilinearen Funktionen
Vh := P1 Q1 (T ) := [P1 (T 3 ) ∪ Q1 (T 4 )] ∩ V.
(3.7)
Der Grund für die unterschiedliche Wahl der Polynomart auf Drei- und Vierecken liegt in der resultierenden einfachen Struktur der Basis von Vh . Funktionen vh ∈ Vh sind stets linear auf Kanten und eindeutig bestimmt durch
die Werte an den Knoten der Partition. Eine Basis bilden die sogenannten
Hutfunktionen (nodale Basisfunktionen).
Definition 3.14 (Hutfunktion, nodale Basisfunktion)
Sei T eine reguläre Partition und z ∈ N ein Knoten. Dann ist die nodale
Basisfunktion ϕz zum Knoten z eindeutig bestimmt durch ϕz ∈ Vh , d.h. ϕz
ist stückweise linear bzw. bilinear, und den Knotenwerten
(
1 falls x = z,
ϕz (x) =
0 falls x ∈ N \ {z}.
Bemerkung 3.15
(a) Die Menge {ϕz }z∈N bildet eine Zerlegung der 1 auf Ω.
(b) Die nodalen Basisfunktionen der freien Knoten z ∈ N \ N (ΓD ) bilden
eine Basis von Vh .
Definition 3.16 (Interpolationsoperator IC )
Zu einer regulären Partition T in Drei- und Vierecke und Vh wie in (3.7), definiert IC für stetige Funktionen u den Interpolationsoperator IC : C(Ω) → Vh
durch
IC u(z) := u(z)
für alle Knoten z ∈ N .
Zu einer hinreichend glatten Lösung u und diskreter Lösung uh ∈ Vh im
Finite-Elemente-Raum nach (3.7), erhalten wir mithilfe des Interpolations26
3.3. LÖSUNGSANSÄTZE
operators IC die a priori Abschätzungen
ku − uh kH 1 (Ω) . hmax kD 2 ukL2 (Ω) und
ku − uh kL2 (Ω) . h2max kD 2 ukL2 (Ω) .
Dabei bezeichnet hmax den maximalen Durchmesser aller Elemente der Partition T und liefert somit Konvergenz der diskreten Lösung für hmax → 0.
Einen Beweis findet man beispielsweise in Kapitel 4 in [BC04].
Bemerkung 3.17
In manchen Anwendungen benötigt man C 1 -Elemente, also Finite-ElementeRäume mit Vh ⊂ C 1 (Ω). Hier sei das Argyris-Element genannt, welches lokal
21 Freiheitsgrade besitzt. Siehe dazu Kapitel 3 in [BS08].
3.3.3
Nichtkonforme Methoden
Im nichtkonformen Fall, also Vh * V , ist die Konvergenz der diskreten Lösung
keine Selbstverständlichkeit. Dafür sind nichtkonforme Ansätze flexibler und
bieten zum Beispiel Vorteile bei Problemen mit Nebenbedingungen. Für Fehlerbetrachtungen benötigen wir eine sogenannte gitterabhängige Norm k · kh,
da die Norm k · kV möglicherweise nicht auf Vh definiert ist. Diese hat zum
Beispiel die Form
sX
kvkh :=
kvk2V,K .
K∈T
m
Für V = H (Ω) gilt dann kvkh = kvkV für alle Funktionen v ∈ V . Wir
betrachten nun die Verallgemeinerung von Satz 3.11. Die im nichtkonformen
Fall fehlende Galerkin-Orthogonalität führt auf einen zusätzlichen Konsistenzfehler.
Satz 3.18 (Strang, [Bra07])
Sei Fh eine lineare stetige Abbildung auf Vh und ah eine stetige und Vh elliptische Bilinearform auf Vh + V bzgl. k · kh , d.h. es existieren positive
Konstanten C und α, sodass für alle Funktionen v, u ∈ Vh + V ,
und für alle v ∈ Vh ,
ah (u, v) ≤ Ckukh kvkh
αkvk2h ≤ ah (v, v)
gilt. Dann gilt mit exakter Lösung u ∈ V und diskreter Lösung uh ∈ Vh die
Abschätzung
1
|ah (u, wh ) − Fh (wh )|
C
inf ku − vh kh +
sup
.
ku − uh kh ≤ 1 +
α vh ∈Vh
α wh ∈Vh
kwh kh
27
KAPITEL 3. FINITE-ELEMENTE-METHODE
Beweis. Die Vh -Elliptizität ergibt für ein beliebiges vh ∈ Vh
αkuh − vh k2h ≤ ah (uh − vh , uh − vh )
= ah (u − vh , uh − vh ) + ah (uh − u, uh − vh )
≤ Cku − vh kh kuh − vh kh + Fh (uh − vh ) − ah (u, uh − vh ).
Division durch αkuh − vh kh und Dreiecksungleichung liefert
1 |ah (u, uh − vh ) − Fh (uh − vh )|
C
ku − vh kh +
.
ku − uh kh ≤ 1 +
α
α
kuh − vh kh
Das Bilden des Infimums über Vh und die Einführung von wh := uh − vh
liefern schließlich die Behauptung.
3.3.4
Beispiele nichtkonformer Methoden
Das einfachste Beispiel der nichtkonformen Finite-Elemente-Methode bildet
das Crouzeix-Raviart-Element und geht auf [CR73] zurück. Dabei betrachten
wir eine Triangulierung T in Dreiecke und stückweise affine Funktionen, die
nur stetig in den Mittelpunkten der Kanten sind.
Definition 3.19 (Crouzeix-Raviart Elemente nach [CR73])
Sei T eine reguläre Triangulierung von Ω in Dreiecke und ΓD der DirichletRand. Mit der Bezeichnung mid(E) für den Mittelpunkt einer Kante E, definiert man
CR1 (T ) := P1 (T ) ∩ C(mid(E)| E ∈ E).
Mögliche Randbedingungen am Dirichlet-Rand sind nur auf die Mittelpunkte
von Dirichlet-Kanten zu beziehen,
1
CRD
(T ) := {v ∈ CR1 (T )| ∀E ∈ ED : v(mid(E)) = 0}.
Im Fall ∂Ω = ΓD schreibt man auch CR01 (T ).
Bemerkung 3.20
Im Gegensatz zum konformen Ansatz mit den nodalen Basisfunktionen aus
Definition 3.14, bei dem es einen Freiheitsgrad pro freien Knoten gab, sind
Crouzeix-Raviart Elemente kantenorientiert. Zu jeder freien Kante in E \ ED
gibt es also genau einen Freiheitsgrad.
28
3.3. LÖSUNGSANSÄTZE
1
Für das Poisson Beispiel von oben mit V = HD
(Ω) gilt offensichtlich
1
1
CRD
(T ) * V = HD
(Ω).
1
Funktionen in CRD
(T ) besitzen demnach nicht notwendigerweise eine schwa1
che Ableitung, sodass die Bilinearform a aus (3.2) nicht auf CRD
(T ) definiert
ist. Allerdings sind solche Funktionen stückweise in H 1 und erlauben mit dem
stückweisen Gradienten ∇N C die Definition
ˆ
Xˆ
∇uh · ∇vh dx.
ah (uh , vh ) :=
∇N C uh · ∇N C vh dx :=
Ω
T ∈T
T
In Beispiel 3.3 diskutierten wir Stetigkeit und Elliptizität der Bilinearform a
aus (3.2) für den konformen Fall. Statt der verwendeten Friedrichs Ungleichung nutzten wir hier eine diskrete Friedrichs Ungleichung, um die Elliptizität von ah zu beweisen.
Satz 3.21 (diskrete Friedrichs Ungleichung)
Sei T eine reguläre Triangulierung des beschränkten Lipschitz-Gebiets Ω.
Dann existiert eine von der Netzweite und |T | unabhängige Konstante CFr
mit
kvh kL2 (Ω) ≤ CFr k∇N C vh kL2 (Ω)
für alle vh ∈ CR01 (T ).
Beweis. Siehe Seite 144 in [Car09].
Definition 3.22 (nichtkonformer Interpolationsoperator IN C )
Zu einer regulären Triangulierung T in Dreiecke sei der nichtkonforme In1
1
terpolationsoperator IN C : HD
(Ω) → CRD
(T ) durch
IN C u(mid(E)) :=
u ds,
E
für alle Kanten E ∈ E, definiert.
Bemerkung 3.23
Für alle Funktionen u ∈ H 1(Ω) und alle Dreiecke T ∈ T erfüllt der nichtkonforme Interpolationsoperator
ˆ
ˆ
ˆ
ˆ
Du dx =
u ν ds =
(IN C u) ν ds =
D(IN C u) dx.
T
∂T
∂T
T
29
KAPITEL 3. FINITE-ELEMENTE-METHODE
Eine Möglichkeit von a priori Abschätzungen für Crouzeix-Raviart-Elemente
bietet Satz 3.18. Der Approximationsfehler kann dabei mithilfe des nichtkonformen Interpolationsoperators abgeschätzt werden. Der Konsistenzfehler führt nach partieller Integration auf Sprünge über alle inneren Kanten.
Insgesamt erhalten wir für u ∈ H 2 (Ω), mit der stückweisen H 1 -Halbnorm
k · kh , die Abschätzung
ku − uh kh . hmax kD 2 ukL2 (Ω) .
Für einen Beweis siehe Kapitel 7 in [BC04].
Bemerkung 3.24
Der nichtkonforme Ansatz der Crouzeix-Raviart-Elemente ist auch für Vierecksgitter möglich. Diese Elemente wurden von Park und Sheen eingeführt
und stehen im Mittelpunkt dieser Arbeit, siehe Kapitel 4.
3.4
Gemischte Methoden
Bei den gemischten Methoden verwenden wir mehrere Bilinearformen. Ihr Ursprung liegt im Bereich der Sattelpunktprobleme, wie der Stokes-Gleichung,
bei der die Nebenbedingung div u = 0 für inkompressible Flüssigkeiten einzuhalten ist. Sie ist jedoch auch für Variationsprobleme ohne Nebenbedingung
wie dem Poisson-Problem anwendbar. Die Theorie der gemischten Methoden
ist geprägt von der inf-sup-Bedingung (auch Ladyzenskaya-Babuska-Brezzi
Bedingung), wie sie bereits in Satz 3.4 auftrat.
3.4.1
Brezzis Splitting Theorem
Seien X und Y zwei Hilberträume. Dazu betrachten wir die zwei stetigen
Bilinearformen
a : X × X → R und b : X × Y → R
mit a(v, v) ≥ 0 für alle v ∈ X. Zu F ∈ X ∗ und G ∈ Y ∗ wird nun ein Paar
(u, p) ∈ X × Y gesucht mit
a(u, v) + b(v, p) = F (v) für v ∈ X
b(u, q)
= G(q) für q ∈ Y.
(3.8)
Die Struktur des Problems beruht auf der klassischen Theorie für Extremwertaufgaben von Lagrange, wie sie bei der Minimierung des Funktionals
1
J(v) = a(v, v) − F (v)
2
30
3.4. GEMISCHTE METHODEN
unter den Nebenbedingungen
b(v, q) = G(q) für alle q ∈ Y
auftritt. Die Frage ist nun, wann die durch (3.8) definierte Abbildung
L : X × Y → X∗ × Y ∗
(u, p) 7→ (F, G)
(3.9)
einen Isomorphismus definiert. Schreiben wir das Problem mit der Bilinearform
A : (X × Y ) × (X × Y ) → R
((u, p), (v, q)) 7→ a(u, v) + b(v, p) + b(u, q)
so können wir die Theorie aus Kapitel 3.2 benutzen. Man kann aber auch die
Bilinearformen a und b getrennt betrachten, wie der folgende Satz zeigt.
Satz 3.25 (Brezzis Splitting Theorem)
Seien a und b zwei Bilinearformen wie zuvor und
Z := {x ∈ X| b(x, y) = 0 für alle y ∈ Y }.
Ist a zusätzlich symmetrisch und Z-elliptisch und erfüllt b die inf-sup Bedingung
b(v, q)
β = inf
sup
q∈Y \{0} v∈X\{0} kvkX kqkY
für ein β > 0, so erklärt die Abbildung L aus (3.9) einen Isomorphismus.
Beweis. Siehe Kapitel 4, Satz 4.3 in [Bra07].
Bemerkung 3.26
Ähnlich wie beim Lax-Milgram Lemma, lässt sich auch Satz 3.25 verallgemeinern. Anstatt Symmetrie und Elliptizität von a genügt die Erfüllung einer
inf-sup Bedingung auf Z sowie einer Nicht-Degeneriertheits-Bedingung, siehe [Car09] auf Seite 203. Eine dritte Möglichkeit findet man auf Seite 41 in
[BF91], wo Symmetrie und Elliptizität von a durch zwei inf-sup Bedingungen
auf Z ersetzt werden.
3.4.2
Gemischte Methoden mit Strafterm
Wir betrachten nun das Problem (3.8) mit einer zusätzlichen Bilinearform
c, dem möglichen Strafterm. Dieser bietet zum Beispiel die Möglichkeit des
31
KAPITEL 3. FINITE-ELEMENTE-METHODE
Übergangs der Stokes-Gleichung zur linearen Elastizitätstheorie. Wir definieren die Bilinearform
c : Y × Y → R.
Das dazugehörige Problem lautet: Finde zu F ∈ X ∗ und G ∈ Y ∗ ein Paar
(u, p) ∈ X × Y , sodass
a(u, v) + b(v, p) = F (v) für v ∈ X
b(u, q) − c(p, q) = G(q) für q ∈ Y.
(3.10)
Die Existenz und Eindeutigkeit solch einer Lösung ergibt sich mit nur wenigen
zusätzlichen Voraussetzungen an die Bilinearform c.
Satz 3.27 (Existenz und Eindeutigkeit)
Die Bilinearformen a und b erfüllen die Voraussetzungen von Satz 3.25 oder
die Verallgemeinerung nach Bemerkung 3.26. Zusätzlich sei die Bilinearform
c stetig und es gelte c(q, q) ≥ 0 für alle q ∈ Y . Dann wird durch (3.10) ein
Isomorphismus
L : X × Y → X∗ × Y ∗
erklärt.
Beweis. Siehe Kapitel 4, Satz 4.11 in [Bra07].
32
Kapitel 4
Park-Sheen Elemente
Dieses Kapitel beschäftigt sich mit Park-Sheen Elementen und dessen Verallgemeinerung auf beliebige Partitionen in Drei- und konvexe Vierecke. Dabei
handelt es sich, wie bei den Crouzeix-Raviart Elementen in Definition 3.19,
um stückweise lineare Funktionen, die stetig in den Kantenmittelpunkten
sind. Eingeführt wurden diese Elemente 2003 in [PS03] bzw.[Par03].
In dieser Arbeit sind Vierecke stets abgeschlossen und konvex mit Innenwinkeln echt kleiner als π. Zusätzlich seien alle Gebiete Ω polygonal berandet
und Partitionen regulär nach Definition 3.7.
Definition 4.1 (Kanten-Nachbar, Rk , Kanten-zusammenhängend)
Zwei Elemente A und B einer Partition T heißen Kanten-Nachbarn, bzw. es
gilt ARB, falls sie eine gemeinsame Kante besitzen, also E(A)∩E(B) ⊆ E. Es
gilt ARk B für k ≥ 1 falls ARB oder Elemente C1 , . . . , Cm ∈ T , m ≤ k − 1,
existieren mit ARC1 , C1 RC2 , . . . , Cm RB. Zwei Elemente A und B heißen
Kanten-zusammenhängend, falls AR∞ B.
Bemerkung 4.2 (Kanten-Zusammenhangskomponente)
Die Relation R∞ ist eine Äquivalenzrelation und definiert Äquivalenzklassen,
die Kanten-Zusammenhangskomponenten genannt werden.
Die Definition der Park-Sheen Elemente ist identisch zu den Crouzeix-RaviartElementen aus Definition 3.19, mit der Ausnahme, dass nun auch Vierecke
erlaubt sind.
Definition 4.3 (Park-Sheen Elemente)
Zu einer Kanten-zusammenhängenden Partition T in Drei- und Vierecke
wird der nichtkonforme Finite-Elemente-Raum der Park-Sheen Elemente de33
KAPITEL 4. PARK-SHEEN ELEMENTE
finiert durch
P S(T ) := P1 (T ) ∩ C(mid(E)| E ∈ E).
Nichtkonforme P1-Elemente auf Vierecksgittern
4.1
Wie bei den nichtkonformen Elementen auf Dreiecken, werden wir auch hier
nur die Werte an Kantenmittelpunkten vorgeben. Dass es genau so viele
Freiheitsgrade gibt wie Kanten, können wir allerdings nicht erwarten, da ein
Viereck aus vier Kanten besteht, eine affine Funktion f (x, y) = a + bx + cy
dagegen nur über drei Freiheitsgrade verfügt.
Im ersten Teil betrachten wir nur Kanten-zusammenhängende Partitionen T
in Vierecke eines einfach zusammenhängenden Gebiets Ω. Um zu verdeutlichen, dass eine Partition nur aus Vierecken besteht, schreiben wir T 4 . Wie
zuvor bezeichnen E und N die Menge der Kanten bzw. Knoten von T 4 .
Definition 4.4 (E(z))
Zu einer Partition T und einem Knoten z ∈ N , bezeichnet E(z) die Menge
aller Kanten mit Endpunkt z,
E(z) := {E ∈ E| z ∈ N (E)}.
4.1.1
Diagonalregel
Gegeben sei ein Viereck Q und vier Werte an den Kantenmittelpunkten
m1 , . . . , m4 . Die Frage ist, wann man eine affine Funktion durch diese Werte
legen kann. Entscheidend dafür ist die Eigenschaft, dass die vier Kantenmittelpunkte eines konvexen Vierecks stets ein Parallelogramm bilden.
Lemma 4.5 (Diagonalregel, [PS03])
Zu gegebenen Werten uj an den Kantenmittelpunkten mj , 1 ≤ j ≤ 4, existiert
genau dann eine affine Funktion u ∈ P1 (Q) mit u(mj ) = uj , falls
u1 + u3 = u2 + u4 .
Beweis. Es seien z1 , . . . , z4 die Knoten von Q und u ∈ P1 (Q). Dann gilt
u(m1 ) + u(m3 ) =
u(z4 ) + u(z1 ) u(z2 ) + u(z3 )
+
= u(m2 ) + u(m4 ).
2
2
34
4.1. NICHTKONFORME P1 -ELEMENTE AUF VIERECKSGITTERN
z4
m4
z3
m1
m3
z1
m2
z2
Abbildung 4.1: Die Mittelpunkte eines konvexen Viereckes bilden stets ein
Parallelogramm.
Seien nun uj gegeben mit u1 + u3 = u2 + u4 und u ∈ P1 (Q) die eindeutig
bestimmte affine Funktion mit u(m1 ) = u1 , u(m2 ) = u2 und u(m3 ) = u3 . Mit
der Rechnung oben folgt dann auch u(m4 ) = u4 .
4.1.2
Nodale Basisfunktion I
Obwohl Funktionen in P S(T ) durch die Werte in den Kantenmittelpunkten
definiert werden, sind die Basisfunktionen knotenorientiert. Wir sprechen
daher auch hier von nodalen Basisfunktionen.
Definition 4.6 (nodale Basisfunktion I)
Zu einer Kanten-zusammenhängenden Partition T 4 eines Lipschitz-Gebiets
ist die nodale Basisfunktion ϕz zum Knoten z ∈ N eindeutig bestimmt durch
ϕz ∈ P S(T 4 ) und
(
1 falls E ∈ E(z),
(4.1)
ϕz (mid(E)) =
0 falls E ∈ E \ E(z),
für alle Kanten E ∈ E.
Bemerkung 4.7
(a) Die Funktion ϕz erfüllt alle Diagonalregeln, da die von Null verschiedenen
Werte an Kantenmittelpunkten an benachbarten Kanten auftreten. Somit ist
ϕz ∈ P S(T 4 ) wohldefiniert.
(b) Mit einer Aufzählung E = {E1 , . . . , E|E| } lässt sich u ∈ P S(T 4 ) repräsentieren durch den Vektor xu ∈ R|E| , definiert durch
xu (j) := u(mid(Ej ))
für alle j = 1, . . . , |E|.
35
KAPITEL 4. PARK-SHEEN ELEMENTE
Dieser enthält alle Funktionswerte an den Kantenmittelpunkten, wo u stetig
ist. Seien Ej1 , . . . , Ej4 die vier Kanten eines Vierecks Qj ∈ T 4 und M ∈
4
{−1, 0, 1}|T |×|E| die Matrix, gegeben durch
1 falls k = j1 oder k = j3 ,
Mjk = −1 falls k = j2 oder k = j4 ,
0 sonst,
für j = 1, . . . , |T 4 |, k = 1, . . . , |E|. Diese kodiert alle |T 4 | Diagonalregeln,
d.h. für u ∈ P S(T 4 ) gilt dann Mxu = 0. Sei umgekehrt v ∈ C(Ω) mit
Vektor xv wie oben. Dann impliziert Mxv = 0 die eindeutige Existenz einer
diskreten Funktion vP S ∈ P S(T 4 ) mit v(mid(Ej )) = vP S (mid(Ej )) für alle
j = 1, . . . , |E|.
Eine Basis des Finite-Elemente-Raums der Park-Sheen Elemente für Partitionen in Vierecke einfach zusammenhängender Gebiete liefert der nachfolgende
Satz. Den Beweis findet man in Kapitel 2.3 von [PS03]. Die Verallgemeinerung auf beliebige Partitionen werden wir in Kapitel 4.3 vorstellen.
Satz 4.8 (Park und Sheen, 2003, [PS03])
Sei T 4 eine Kanten-zusammenhängende Partition des einfach zusammenhängenden Lipschitz-Gebiets Ω ⊂ R2 in konvexe Vierecke und {ϕi }i=1,...,|N | die
Menge der nodalen Basisfunktionen aus Definition 4.6. Dann hat P S(T 4 )
die Dimension |E| − |T 4 | = |N | − 1 und für jedes j0 ∈ {1, . . . , |N |} ist
∨
(ϕ1 , . . . , ϕj0 , . . . , ϕ|N | ) := (ϕ1 , . . . , ϕj0 −1 , ϕj0 +1 , . . . , ϕ|N | )
eine Basis von P S(T 4 ).
Bemerkung 4.9
Der Satz besagt unter anderem, dass alle Diagonalregeln, im Sinne der Matrix
M aus Bemerkung 4.7(b), voneinander linear unabhängig sind. Die Matrix
M hat also vollen Rang.
4.1.3
Nodale Basisfunktion II
Obwohl wir bei Ω von einem Lipschitz-Gebiet ausgehen, müssen wir im Folgenden auch nicht-Lipschitz-Gebiete in Betracht ziehen. Dies ist nötig, da
später, bei Partitionen in Drei- und Vierecke, jede Kanten-Zusammenhangskomponente von Vierecken einzeln betrachtet wird. Dass so eine KantenZusammenhangskomponente keine Partition eines Lipschitz-Gebiets sein muss,
36
4.2. KANTENWEGE
sieht man in Abbildung 4.3 (Die Löcher wären in der Ausgangspartition mit
je zwei Dreiecken besetzt). In solch einem Fall erlauben wir mehrere nodale
Basisfunktionen pro Knoten. Zu einem Knoten zn ∈ N betrachten wir die
Menge benachbarter Vierecke
T 4 (zn ) := {Q ∈ T 4 | zn ∈ N (Q)}
und deren Unterteilung in Mn paarweise disjunkte Kanten-Zusammenhangskomponenten Cn,1 , . . . , Cn,Mn ,
T 4 (zn ) = Cn,1 ∪˙ Cn,2 ∪˙ . . . ∪˙ Cn,Mn .
(4.2)
Als Beispiel betrachte man Abbildung 4.2. Man beachte, dass für LipschitzGebiete M1 = M2 = · · · = M|N | = 1 gilt.
Q3
z1
Q2
Q5
z2
Q1
Q4
Abbildung 4.2: Zwei Beispiele zu (4.2): (links) T 4 (z1 ) = C1,1 = {Q1 , Q2 , Q3 }
mit M1 = 1 und (rechts) T 4 (z2 ) = C2,1 ∪˙ C2,2 mit C2,1 = {Q4 }, C2,2 = {Q5 }
mit M2 = 2.
Definition 4.10 (nodale Basisfunktion II)
Zu einem Knoten zn ∈ N , mit benachbarten Vierecken T 4 (zn ) und deren
Zerlegung T 4 (zn ) = Cn,1 ∪˙ . . . ∪˙ Cn,Mn , werden Mn nodale Basisfunktionen
ϕn,1 , . . . , ϕn,Mn ∈ P S(T 4 ) auf folgende Weise definiert: Zu gegebener Partition Cn,m wird die nodale Basisfunktion ϕ ∈ P S(Cn,m ) bzgl. zn aus Definition 4.6 durch Null zu einer Funktion ϕn,m ∈ P S(T 4 ) fortgesetzt.
4.2
Kantenwege
Für die Verallgemeinerung von Satz 4.8 beschäftigen wir uns nun mit mehrfach zusammenhängenden Gebieten. Dabei werden wir feststellen, dass eine
neue Form von Basisfunktionen von Nöten ist.
Definition 4.11 (mehrfach zusammenhängend)
Ein beschränktes Gebiet Ω ⊂ R2 heißt k-fach zusammenhängend, falls ∂Ω
37
KAPITEL 4. PARK-SHEEN ELEMENTE
aus genau k paarweise disjunkten Zusammenhangskomponenten besteht,
∂Ω = Γ0 ∪˙ Γ1 ∪˙ . . . ∪˙ Γk−1 .
Dabei ist Γ0 der Rand der unbeschränkten Zusammenhangskomponente von
R2 \ Ω.
Γ0
Γ1
Γ0
Γ1
Γ0
Γ0
Abbildung 4.3: Beispiel eines (links) einfach- und (rechts) zweifachzusammenhängenden nicht-Lipschitz-Gebietes.
Beispiel 4.12 (Bedarf neuer Basisfunktionen)
Sei T 4 die Partition des Gebiets Ω = (−1, 2)2 \[0, 1]2 in 8 Quadrate der Größe
1, wie in Abbildung 4.4 dargestellt. Die linke Seite zeigt die nodalen Basisfunktionen −ϕ1 , +ϕ2, . . . , −ϕ16 . Dabei sind ϕ1 , . . . , ϕ15 linear unabhängig
und P S(T 4 ) ist von Dimension ≥ 15.
Offensichtlich gilt ϕ16 = −ϕ1 + ϕ2 − · · · − ϕ14 + ϕ15 und somit ϕ16 ∈
span{ϕ1 , . . . , ϕ15 }. Die rechte Seite von Abbildung 4.4 definiert die Funktion
ψ ∈ P S(T 4 ) \ span{ϕ1 , . . . , ϕ15 }.
Dass ψ nicht von den nodalen Basisfunktionen erzeugt werden kann, zeigt
das lineare Funktional
ℓ : P S(T 4 ) → R
v 7→ v(1/2, 0) + v(1/2, 1) − v(0, 1/2) − v(1, 1/2)
und die Rechnung ℓ(ϕ1 ) = · · · = ℓ(ϕ15 ) = 0 6= 1 = ℓ(ψ).
38
4.2. KANTENWEGE
+ϕ13
−ϕ9
+ϕ5
−ϕ14
+ϕ10
−ϕ6
+ϕ15
−ϕ11
+ϕ7
−ϕ16
0
+ϕ12
1
−ϕ8
-1
ψ
0
−ϕ1
+ϕ2
−ϕ3
+ϕ4
Abbildung 4.4: Nodale Basisfunktionen ϕ1 , . . . , ϕ16 aus Definition 4.6 (links)
sind linear abhängig, beinhalten aber nicht die Funktion ψ ∈ P S(T 4 )
(rechts), wie Beispiel 4.12 zeigt.
Bemerkung 4.13
Der Aufbau des linearen Funktionals in Beispiel 4.12 zeigt den Grund, warum
in diesem Beispiel nodale Basisfunktionen nicht ausreichen. Jede dieser Funktionen erfüllt automatisch auch die Diagonalregel des Quadrats, welches aus
(−1, 2)2 ausgeschnitten wurde.
Funktionen vom Typ ψ, wie in Beispiel 4.12, verbinden in gewisser Art die
verschiedenen Zusammenhangskomponenten von R2 \ Ω und werden nun
näher betrachtet.
Definition 4.14 (Kantenweg)
Sei T 4 eine Kanten-zusammenhängende Partition in Vierecke eines k-fach
zusammenhängenden Gebiets Ω ⊂ R2 mit k ≥ 2. Ferner seien Γa und Γb
zwei verschiedene Zusammenhangskomponenten von ∂Ω. Zu einer Subpartition {Q1 , . . . , QJ } ⊂ T 4 , die (in sich) Kanten-zusammenhängend ist,
E(Q1 ) ∩ E(Γa ) 6= ∅ und E(QJ ) ∩ E(Γb ) 6= ∅
sowie
Ej+1 := E(Qj ) ∩ E(Qj+1 ) ∈ E,
j = 1, . . . , J − 1
erfüllt, wähle man Kanten
E1 ∈ E(Q1 ) ∩ E(Γa ) und
EJ+1 ∈ E(QJ ) ∩ E(Γb).
39
KAPITEL 4. PARK-SHEEN ELEMENTE
Dann ist ein Kantenweg ψ
1
ψ(m) := ±1
0
∈ P S(T 4 ) definiert durch
falls m = mid(E1 ),
falls m = mid(Ej ) für j = 2, . . . , J,
für alle anderen Kantenmittelpunkte.
(4.3)
Dabei sind die Vorzeichen eindeutig durch die Diagonalregeln bestimmt. Genauer gilt für j = 1, . . . , J −1, ψ(mid(Ej+1 )) = ψ(mid(Ej )), falls Ej ∩Ej+1 6=
∅ und ψ(mid(Ej+1 )) = −ψ(mid(Ej )), falls Ej ∩ Ej+1 = ∅.
0
Γa
1
0
−1
Q1
0
0
−1
1
0
0
0
−1
0
0
0
1
Γb
Abbildung 4.5: Illustration von ψ aus Definition 4.14. Da E(Γa ) ∩ E(Q1) zwei
Kanten beinhaltet, existieren mehrere Möglichkeiten für die Wahl von ψ.
Bemerkung 4.15
(a) Nach Definition gilt supp ψ = Q1 ∪ · · · ∪ QJ .
(b) Die Wahl von E1 und EJ ist nicht eindeutig, siehe Abbildung 4.5. Auch
die Wahl der Subpartition {Q1 , . . . , QJ } und somit supp ψ ist nicht eindeutig,
sodass es es für ψ viele Möglichkeiten gibt.
4.3
Basis von P S(T )
Dieser Abschnitt beschäftigt sich mit der Basis des Finite-Elemente-Raums
P S(T ) für beliebige Partitionen in Drei- und Vierecke und verallgemeinert
damit Satz 4.8. Dabei betrachten wir zunächst Partitionen mehrfach zusammenhängender Gebiete in Kanten-zusammenhängende Vierecke. Der allgemeine Fall ergibt sich dann als Folgerung.
Satz 4.16 (Basis für mehrfach zusammenhängende Gebiete)
Sei T 4 eine reguläre Partition eines k-fach zusammenhängenden Gebiets
40
4.3. BASIS VON P S(T )
Ω ⊂ R2 in Kanten-zusammenhängende Vierecke. Dann hat P S(T 4 ) die von
k unabhängige Dimension
dim(P S(T 4 )) = |E| − |T 4 |.
Für n = 1, . . . , |N |, m = 1, . . . , Mn seien ϕn,m die nodalen Basisfunktionen aus Definition 4.10 und (für k ≥ 2) ψ1 , . . . , ψk−1 Kantenwege aus Definition 4.14. Dabei verbindet jeder Kantenweg zwei verschiedene Zusammenhangskomponenten von ∂Ω, sodass jede Randkomponente zumindest einmal auftritt. Dann ist für jedes Paar (n0 , m0 ), n0 ∈ {1, . . . , |N |}, m0 ∈
{1, . . . , Mn0 },
∨
(ψ1 , . . . , ψk−1 , ϕ1,1 , . . . , ϕ1,M1 , ϕ2,1 , . . . , ϕn0 ,m0 , . . . , ϕ|N |,M|N | )
(4.4)
eine Basis von P S(T 4 ).
Beweis. Die Argumente für den Beweis von dim(P S(T 4 )) ≤ |E| − |T 4 | auf
Seite 632 in [PS03] gelten auch für den Fall von mehrfach zusammenhängenden
Gebieten. Es bleibt zu zeigen, dass es sich bei (4.4) um |E| − |T 4 | linear unabhängige Funktionen handelt.
Der Beweis nutzt vollständige Induktion über die Anzahl der Elemente in
T 4 . Der Induktionsanfang, |T 4 | = 1, folgt aus Satz 4.8. Es gelte die Behauptung für Partitionen in n Vierecke. Es sei nun T 4 eine beliebige Partition in
n + 1 ≥ 2 Kanten-zusammenhängende Vierecke. Wähle ein Viereck Q ∈ T 4
mit E(Q) ∩ E(∂Ω) 6= ∅, sodass auch die Partition
S 4 := T 4 \ {Q}
Kanten-zusammenhängend ist. Die Induktionsvoraussetzung liefert dann eine
Basis von P S(S 4 ). Es ergeben sich vier Fälle:
1. Fall: |E(Q) ∩ E(S 4 )| = 1 (siehe Abbildung 4.6). Man betrachtet zunächst
alle Basisfunktionen von P S(S 4 ), die im Punkt M1 verschwinden. Solche
Funktionen werden trivial mit Null fortgesetzt. Alle anderen Basisfunktionen ϕ werden mit ϕ(M4 ) := ϕ(M1 ) und ansonsten Null fortgesetzt, sodass
die Diagonalregel auf Q erfüllt ist. Alle so fortgesetzten Funktionen bleiben
linear unabhängig in P S(T 4 ). Zusammen mit den nodalen Basisfunktionen
der Knoten A und B, ergibt das
(|E| − 3) − |S 4 | + 2 = (|E| − 3) − (|T 4 | − 1) + 2 = |E| − |T 4 |
linear unabhängige Funktionen. Letztere sind aufgrund ihrer Funktionswerte
in M3 linear unabhängig .
41
KAPITEL 4. PARK-SHEEN ELEMENTE
2. Fall: E(Q) ∩ E(S 4 ) besteht aus genau zwei benachbarten Kanten (siehe
Abbildung 4.6). Wie zuvor werden alle Basisfunktionen ϕ von P S(S 4 ) durch
ϕ(M4 ) := ϕ(M1 ) − ϕ(M2 ) und ϕ(M3 ) := 0 fortgesetzt, sodass die Diagonalregel auf Q erfüllt ist. Die nodale Basisfunktion im Knoten A ist aufgrund
des Funktionswertes in M3 linear unabhängig. Damit sind es insgesamt
(|E| − 2) − |S 4 | + 1 = |E| − |T 4 |
linear unabhängige Funktionen.
M3
A
B
M3
A
Q
Q
M4
M4
M1
M2
M1
Sℓ4
Sℓ4
Abbildung 4.6: Situation des (links) ersten und (rechts) zweiten Falls im
Beweis von Satz 4.16.
3. Fall: E(Q)∩E(S 4 ) besteht aus genau zwei gegenüberliegenden Kanten (siehe Abbildung 4.7). Alle Basisfunktionen von P S(S 4 ) werden so fortgesetzt,
dass die Diagonalregel auf Q erfüllt ist und sie in M1 verschwinden. Anders
als bisher wird in diesem Fall die Topologie verändert: Eine Randkomponente wird geteilt, sodass ein Kantenweg nach Definition 4.14 eingefügt werden
muss. Dieser ist definiert durch die Werte 1 bei M1 , −1 bei M3 und Null
an allen anderen Kantenmittelpunkten. Offensichtlich sind diese Funktionen
linear unabhängig. Zudem ist mithilfe der Induktionsvoraussetzung sichergestellt, dass zu jeder Randkomponente ein Kantenweg existiert. Die gleiche
Rechnung wie im zweiten Fall zeigt die Behauptung.
M3
M3
Q
M4
Sℓ4
Q
M2
M1
Sℓ4
Sℓ4
Abbildung 4.7: Situation des (links) dritten und (rechts) vierten Falls im
Beweis von Satz 4.16.
42
4.3. BASIS VON P S(T )
4. Fall: |E(Q) ∩ E(S 4 )| = 3 (siehe Abbildung 4.7). Da (|E| − 1) − |S 4 | =
|E|−|T 4 |, müssen die Basisfunktionen von P S(S 4 ) lediglich der Diagonalregel
entsprechend fortgesetzt werden.
Die so konstruierte Basis von P S(T 4 ) stimmt möglicherweise nicht vollständig
mit (4.4) überein. Eine entsprechende Wahl der Basis von P S(S 4 ) und einfache Linearkombinationen (vor allem mit den neu hinzugefügten Basisfunktionen) führen zur Behauptung.
Bemerkung 4.17
Sei B die (|E| − |T 4 |) × |E| Matrix, bei der Bαβ dem Funktionswert der α-ten
Basisfunktion von (4.4) am Mittelpunkt der β-ten Kante gleicht. Die Matrix
M bezeichne wieder die Matrix, die alle Diagonalregeln beinhaltet, wie in
Bemerkung 4.7.(b). Satz 4.16 besagt nun, dass ein Vektor x, genau dann
Mx = 0 erfüllt, wenn x eine Linearkombination der Zeilen von B ist. Dann
repräsentiert der Vektor x die Funktion in P S(T ) mit den entsprechenden
Werten in den |E| Kantenmittelpunkten.
Der folgende Satz liefert schließlich eine Basis für den Raum der Park-Sheen
Elemente auf beliebigen Partitionen in Drei- und Vierecke.
Satz 4.18 (Basis von P S(T ))
Sei T = T 3 ∪T 4 eine reguläre Partition eines beschränkten Lipschitz-Gebiets
Ω in Drei- (T 3 ) und konvexe Vierecke (T 4 ). Zudem sei T 4 in disjunkte
Kanten-Zusammenhangskomponenten zerlegt,
T 4 = C1 ∪˙ C2 ∪˙ . . . ∪˙ CK .
Zu jeder Zusammenhangskomponente Ck , k = 1, . . . , K, sei (fk,1 , . . . , fk,|Bk | )
eine Basis von P S(Ck ) nach Satz 4.16. Fk,j ∈ P S(T ) bezeichnet die Fortsetzung von fk,j , die auf allen Mittelpunkten von Kanten in E \E(Ck ) verschwindet, k = 1, . . . , K, j = 1, . . . , |Bk | . Zu einer Aufzählung E(T 3 ) \ E(T 4 ) =
{E1 , . . . , EL } bezeichne ferner φE die Crouzeix-Raviart Basisfunktion zur
Kante E, d.h. φE hat den Wert 1 bei mid(E) und den Wert 0 an den Mittelpunkten von E \ {E}. Dann ist
(F1,1 , . . . , F1,|B1 | , F2,1 , . . . , FK,|BK | , φE1 , . . . , φEL )
(4.5)
eine Basis von P S(T ).
Beweis. Betrachtet wird zunächst eine Linearkombination der Funktionen
in (4.5), die an allen Kantenmittelpunkten verschwindet. Da an den Mittelpunkten von E(T 3 ) \ E(T 4 ) jeweils nur eine Funktion von (4.5) ungleich
43
KAPITEL 4. PARK-SHEEN ELEMENTE
Null ist, müssen die Koeffizienten von {φEj }j=1,...,L Null sein. Die Komponenten Ck sind nicht Kanten-zusammenhängend und können daher separat
betrachtet werden. Da mit Bk jeweils eine Basis gegeben ist, folgt die lineare
Unabhängigkeit von (4.5).
Sei nun uP S ∈ P S(T ) beliebig. Offensichtlich spannen die Funktionen in (4.5)
den Raum P S(T 4 ) auf, sodass die Werte von uP S an den Mittelpunkten von
E(T 4 ) konstruiert werden können. Für jede verbleibende Kante existiert eine
Crouzeix-Raviart Basisfunktion.
Bemerkung 4.19
Für beliebige Partitionen in Drei- und Vierecke gilt dim(P S(T )) = |E|−|T 4 |.
4.4
Konsistente Dirichlet-Daten
Bisher haben wir auf jegliche Randbedingungen verzichtet. Dies ändern wir
nun, indem wir Funktionswerte an den Mittelpunkten von Randkanten vorgeben. Bei Partitionen in Dreiecke, also im Fall von Crouzeix-Raviart Elementen, ist dies ohne Einschränkungen möglich. Bei Vierecken ist die Forderung
nach konsistenten Randdaten nicht trivial. Man denke beispielsweise an ein
einzelnes Viereck, wo wir aufgrund der Diagonalregel nicht vier beliebige
Werte vorgeben können.
Definition 4.20 (konsistente Randdaten)
Dirichlet-Daten, d.h. vorgegebene Werte an den Mittelpunkten von E(ΓD ),
heißen konsistent, falls eine Linearkombination von Funktionen in P S(T )
existiert, die die gegebenen Randwerte annimmt.
Beispiel 4.21
Für jede Kanten-zusammenhängende Partition eines einfach zusammenhängenden Gebiets in Vierecke existieren inkonsistente Randdaten.
x · ϕA
0
E1
1
-x · ϕB
0
Abbildung 4.8: Inkonsistente Dirichlet-Daten.
44
4.4. KONSISTENTE DIRICHLET-DATEN
Beweis. Da das zugrunde liegende Gebiet einfach zusammenhängend ist, gibt
es eine gerade Anzahl von Randkanten.Die Randbedingungen sind gegeben
durch den Wert 1 an einer Randkante E1 = conv{A, B} und 0 sonst. Nur die
Funktionen ϕA und ϕB sind ungleich Null bei mid(E1 ). Der Ansatz x mal
ϕA und sukzessive ±x mal die entsprechende nodale Basisfunktion, um die
0-Randdaten zu erzeugen, führt (wegen der geraden Anzahl von Randkanten)
auf −x mal ϕB . Folglich ergibt sich der Wert x − x = 0 im Mittelpunkt der
Kante E1 und somit ein Widerspruch
Bemerkung 4.22
Inkonsistente Randdaten auf P S(T ) sind immer von der Form wie in Beispiel 4.21 beschrieben. Zu gegebenen inkonsistenten Randdaten können wir
also eine Linearkombination von Basisfunktionen addieren, sodass genau eine
Kante existiert mit einem von Null verschiedenen Wert.
Der folgende Satz gibt Aufschluss, wie man einer Partition ansehen kann, ob
inkonsistente Daten möglich sind.
Satz 4.23
Seien Γ0 , . . . , Γk−1 die Zusammenhangskomponenten von ∂Ω und T eine
Kanten-zusammenhängende Partition von Ω in Drei- und Vierecke. Dann
sind jegliche Randdaten konsistent genau dann, wenn eine Komponente Γj0
existiert, die eine Kante eines Dreiecks beinhaltet oder aus einer ungeraden
Anzahl von Kanten besteht.
Beweis. Bestehen alle Randkomponenten aus einer geraden Anzahl von Viereckskanten, so können inkonsistente Daten analog zu Beispiel 4.21 konstruiert
werden.
Für die andere Richtung konstruiert man die Randdaten mit dem Wert 1
an einer beliebigen Kante E und 0 sonst. Aufgrund der Kantenwege, die
alle Randkomponenten miteinander verbinden, reicht es Kanten auf Γj0 zu
betrachten. Auf Kanten von Dreiecken ist nichts zu zeigen, sei also E =
conv{A, B} Kante eine Vierecks. Der Ansatz mit 1/2 mal ϕA und 1/2 mal
ϕB und entsprechend ±1/2 mal die restlichen nodalen Basisfunktionen am
Rand führt zum Ziel. Ein Widerspruch kann aufgrund der Voraussetzung
nicht auftreten.
Sei B die Matrix aus Bemerkung 4.17, d.h. Bαβ ist gleich dem Wert der
α-ten Basisfunktion von P S(T ) am Mittelpunkt der β-ten Kante. Zu einer
Aufzählung der Dirichlet-Kanten ED = {E1 , . . . , E|ED | } ⊆ E bezeichne bD ∈
45
KAPITEL 4. PARK-SHEEN ELEMENTE
R|ED | den Vektor der Dirichlet-Daten und, in Matlab-Notation,
BD := B(:, ED )
eine Teilmatrix von B. Dann lässt dich die Dirichlet-Randbedingung schreiben als
BtD x = bD ,
wobei x den Koeffizientenvektor zur Basis von P S(T ) bezeichnet. Existiert
solch ein x ∈ Rdim(P S(T )) , so sind die gegebenen Randdaten konsistent. Allerdings kann es mehrere Lösungen geben, siehe zum Beispiel die nicht triviale
Darstellung von Null-Randdaten ϕ7 − ϕ6 + ϕ10 − ϕ11 auf der linken Seite von
Abbildung 4.4.
Bemerkung 4.24
Konsistente Randdaten sind notwendig für die Existenz diskreter Lösungen.
Hinreichende Bedingungen betrachten wir in Satz 5.5.
Es bleibt die Frage, wie man mit inkonsistenten Dirichlet-Daten umgeht. Hier
haben wir zwei Möglichkeiten:
• Abändern der Partition: Satz 4.23 besagt, dass die Aufteilung eines
Vierecks am Rand in zwei Dreiecke zu konsistenten Randdaten führt.
• Abändern der Daten: Statt bD betrachtet man dessen Projektion bcon
D
in den Raum der konsistenten Daten. Dieser bildet einen |ED | − 1 dimensionalen Unterraum von R|ED | .
Im folgenden Abschnitt stellen wir einen Operator vor, der in den Raum
der Park-Sheen Elemente abbildet. Diese Eigenschaft garantiert dann auch
konsistente Randdaten.
4.5
Approximationsoperator
Für Crouzeix-Raviart Elemente (siehe Kapitel 3.3.4) definierten wir einen
nichtkonformen Interpolationsoperator IN C : H 1 (Ω) → CR1 (T 3 ) = P S(T 3 ),
der auf allen Dreiecken T ∈ T 3 die Eigenschaft
ˆ
ˆ
Du dx =
D(IN C u) dx
(4.6)
T
T
erfüllt. Dies führt zu guten Approximationsergebnissen, sodass wir einen
Operator mit der gleichen Eigenschaft für den Raum der nichtkonformen
46
4.5. APPROXIMATIONSOPERATOR
Park-Sheen Elemente suchen. Da wir für jedes Viereck die Diagonalregel
(Lemma 4.5) erfüllen müssen, können wir den obigen Ansatz nicht verwenden. Stattdessen benutzen wir den nichtkonformen Interpolationsoperator
aus [PS03].
Definition 4.25 (Approximationsoperator J )
Es bezeichne J : C(Ω) → P S(T ) den Approximationsoperator mit
1
J ϕ(m) := (ϕ(v1 ) + ϕ(v2 )),
2
für eine stetige Funktion ϕ und alle Kantenmittelpunkte m ∈ mid(E). Dabei
bezeichnen v1 und v2 die Endpunkte der Kante mit Mittelpunkt m.
Bemerkung 4.26
Es ist leicht zu sehen, dass J ϕ in P S(T ) liegt (also alle Diagonalregeln
erfüllt) und eindeutig durch die Werte an den Kantenmittelpunkten definiert
ist. Somit ist J wohldefiniert.
Bemerkung 4.27 (nodale Interpolation auf Dreiecken)
Sei T ein Dreieck mit Knoten v1 , v2 , v3 und ϕ ∈ H 2 (T ). Dann liefert der
Approximationsoperator J die durch J ϕ(mj ) = (ϕ(vj ) + ϕ(vj+1 ))/2, j =
1, 2, 3, eindeutig definierte affine Funktion. Der nodale Interpolationsoperator
IC hat die gleiche Eigenschaft, sodass auf Dreiecken J = IC gilt.
Bemerkung 4.28
Da der Approximationsoperator J an den Knoten interpoliert, ist das Bild
von J stets knotenorientiert. Dadurch kann beispielsweise der Kantenweg ψ
aus Abbildung 4.4 nicht durch J erzeugt werden.
4.5.1
Abschätzung von kw − J wkH 1 (Q)
In Vorbereitung auf die a priori Fehlerabschätzung in Kapitel 5.3, wollen wir
nun für eine H 2 -Funktion w die L2 -Norm sowie die H 1 -Halbnorm von w −
J w abschätzen. Wir beschränken uns dabei auf ein konvexes Viereck Q mit
Voraussetzungen wie in Kapitel 2.1 sowie Konstanten ω0 und θ0 . Der Beweis
der Abschätzung nutzt die bekannten Interpolationsfehlerabschätzungen aus
Lemma 2.13.
Satz 4.29
Sei Q ein konvexes Viereck mit Konstanten ω0 und θ0 . Ferner bezeichne C(α)
47
KAPITEL 4. PARK-SHEEN ELEMENTE
zu einem Winkel α die Konstante
1/2
1/4 + 2/π 2
C(α) =
.
1 − | cos α|
Dann gelten für eine Funktion w ∈ H 2 (Q) die Abschätzungen
k∇(w − J w)kL2 (Q) ≤ C(θ0 ) hQ kD 2 wkL2(Q) ,
kw − J wkL2 (Q) ≤ (2C(ω0 ) + C(θ0 )/2) h2Q kD 2 wkL2 (Q) .
P3
m2
T2
P4
T1
P2
F
θ
Tb
(4.7)
(4.8)
m1
E
Ta
P1
Abbildung 4.9: Unterteilung des Vierecks Q in jeweils zwei Dreiecke durch
die Diagonalen, wie in Satz 4.29.
Beweis. Sei E = conv{P1 , P3 } die Diagonale, die das Viereck Q in die beiden
Dreiecke T1 = conv{P2 , E} und T2 = conv{P4 , E} teilt. τ1 := (P3 −P1 )/|P3 −
P1 | bezeichne den Tangenteneinheitsvektor zu E. Mit Kantenmittelpunkten
m1 und m2 (siehe Abbildung 4.9) gilt
J w(P3 ) − J w(P1) = 2J w(m2 ) − 2J w(m1 ) = w(P3 ) − w(P1 ).
ffl
Mit e := w − J w und f := ∇e · τ1 folgt E f ds = 0. Die Spur Identität (2.2),
angewendet auf T1 , zeigt
1
f dx = (x − P2 ) · ∇f dx
2 T1
T1
1
kx − P2 kL2 (T1 ) k∇f kL2 (T1 )
≤
2|T1 |
hT
≤ p 1 k∇f kL2 (T1 ) .
8|T1 |
48
4.5. APPROXIMATIONSOPERATOR
ffl
Mit dem Satz des Pythagoras, f¯ := T1 f dx und der Poincaré Abschätzung
nach Payne-Weinberger (2.1) ergibt sich somit
2
2
1
1
2
2
¯
¯
kf kL2 (T1 ) = f − f L2 (T1 ) + f L2 (T1 ) ≤ hT1
k∇f k2L2 (T1 ) .
+
π2 8
Gleiches gilt auch auf T2 . Ersetzt man τ1 durch τ2 , den Tangenteneinheitsvektor zur Diagonale F = conv{P2 , P4 }, so ergibt sich die gleiche Rechnung
auch auf den Dreiecken Ta und Tb . Auf Seite 83 in [Car08] wird gezeigt, dass
alle a ∈ R2 die Ungleichung
|a|2 ≤
(a · τ1 )2 + (a · τ2 )2
1 − |τ1 · τ2 |
erfüllen. Die Auswertung für a := ∇e(x), anschließende Integration über
x ∈ Q sowie die Identität |τ1 · τ2 | = | cos(θ0 )| zeigen
k∇ek2L2 (Q)
≤
k∇e · τ1 k2L2 (T1 ) + k∇e · τ1 k2L2 (T2 ) + k∇e · τ2 k2L2 (Ta ) + k∇e · τ2 kL2 (Tb )
1 − | cos θ0 |
und schließlich die erste Behauptung (4.7).
Die L2 -Norm von w − J w wird mithilfe der Dreiecksungleichung und des
nodalen Interpolationsoperators IC aus Definition 3.16 zerlegt. Dieser wird
bezüglich der Dreiecke T1 und T2 betrachtet. Der Fehler kw − IC wkL2(Q)
wurde bereits in (2.6) abgeschätzt, daher bleibt nur noch g := IC w − J w
abzuschätzen. Auf T1 verschwindet g entlang m1 m2 , sodass zu jedem Punkt
y ∈ T1 ein Punkt x auf m1 m2 existiert mit
g(y) = g(x) + ∇g|T1 · (y − x) = ∇g|T1 · (y − x).
Gleiches gilt auf T2 und es folgt
kgk2L2 (Q) = kgk2L2 (T1 ) + kgk2L2(T2 )
ˆ
ˆ
h2Q
h2Q
2
≤
|∇g(y)| dx +
|∇g(y)|2 dx
4 T1
4 T2
= h2Q /4 k∇gk2L2 (Q) .
Um den Gradienten von g abzuschätzen, verwendet man (4.7) und die Interpolationsfehlerabschätzung (2.5). Die darin enthaltene Konstante enthält
den größten Innenwinkel von T1 bzw. T2 . Da diese jeweils zwischen ω0 und
π − ω0 liegen, ist die auftretende Konstante kleiner oder gleich C(ω0 ). Daher
gilt
k∇gkL2(Q) ≤ k∇(IC w − w)kL2 (Q) + k∇(w − J w)kL2 (Q)
≤ (C(ω0 ) + C(θ0 ))hQ kD 2 wkL2 (Q)
49
KAPITEL 4. PARK-SHEEN ELEMENTE
und somit
kw − J wkL2(Q) ≤ kw − IC wkL2 (Q) + kgkL2(Q)
p
C(ω0 ) + C(θ0 ) 2
hQ kD 2 wkL2 (Q)
≤ 5/3 C(ω0 )h2Q kD 2 wkL2 (Q) +
2
≤ (2C(ω0 ) + C(θ0 )/2)h2Q kD 2 wkL2(Q) .
50
Kapitel 5
Fehleranalysis
Wir betrachten die allgemein elliptische partielle Differentialgleichung mit
reinem Dirichlet-Rand. Ziel ist es, den Fehler abzuschätzen, der beim Lösen
des diskreten Problems im Vergleich zur exakten Lösung auftritt. Die diskrete
Lösung liegt dabei im Raum der Park-Sheen Elemente aus Kapitel 4. Wir
unterscheiden zwei Arten von Fehlerabschätzungen:
• A priori: Hierbei handelt es sich um eine Abschätzung des Fehlers
in Abhängigkeit der exakten Lösung. Dabei werden nur die Eigenschaften der verwendeten Partition und des Problems verwendet, wie
zum Beispiel Quasiuniformitäts-, Stetigkeits-, Elliptizitäts- oder infsup-Konstanten. Die diskrete Lösung wird dazu nicht berechnet.
• A posteriori: Im Gegensatz zur a priori Abschätzung verwenden wir hier
die Park-Sheen Approximation, um eine berechenbare Abschätzung
des Fehlers zu erhalten. An den daraus resultierenden Fehlerschätzer
hat man die Anforderung der Zuverlässigkeit und der Effizienz. Zuverlässigkeit bedeutet, dass der tatsächliche Fehler (bis auf Terme höherer
Ordnung und multiplikative Konstanten) wirklich überschätzt wird. Effizienz besagt wiederum, dass man den Fehlerschätzer durch den echten
Fehler abschätzen kann.
Definition 5.1 (h.o.t.)
Die Abkürzung h.o.t. (higher order terms) bezeichnet Terme höherer Ordnung. Dabei bezieht sich die Ordnung auf die Netzweite. Demnach sind h.o.t.Terme für hinreichend feine Partitionen zu vernachlässigen.
51
KAPITEL 5. FEHLERANALYSIS
5.1
Problemstellung
Zu einem beschränkten Lipschitz-Gebiet Ω, rechter Seite f ∈ L2 (Ω) und
uD ∈ H 2 (Ω) betrachten wir das elliptische Randwertproblem
− div(A∇u) + b · ∇u + γu = f
u = uD
in Ω,
auf ∂Ω.
(5.1)
Für die Elliptizität fordern wir, dass die Matrix A ∈ [L∞ (Ω)]2×2 beschränkt,
symmetrisch und gleichmäßig positiv definit ist. Es existieren also positive
Konstanten αmin , αmax mit
0 < αmin|ξ|2 ≤ ξ t A(x)ξ ≤ αmax |ξ|2 < ∞
für alle ξ ∈ R2 und fast alle x ∈ Ω. Ferner seien b ∈ H(div; Ω)∩[L∞ (Ω)]2 und
γ ∈ L∞ (Ω) fast überall durch Konstanten βmax := kbkL∞ (Ω) bzw. γmax :=
kγkL∞ (Ω) beschränkt. Zusätzlich gelte fast überall
div b ≤ 2γ.
(5.2)
Die stückweise konstante Funktion h ∈ L∞ (Ω) ist für alle Q ∈ T definiert
durch
h|Q = hQ = diam(Q).
5.1.1
Schwache Formulierung
Wir definieren die nicht symmetrische Bilinearform
a(u, v) := (A∇u, ∇v)L2 (Ω) + (b · ∇u + γu, v)L2(Ω)
für Funktionen u, v ∈ H 1 (Ω). Mit dem auf H01 (Ω) definierten linearen Funktional
F := f − a(uD , ·)
ergibt sich die schwache Formulierung: Finde u0 ∈ H01 (Ω), sodass
a(u0 , v) = F (v)
(5.3)
für alle v ∈ H01 (Ω). Dann setzt sich die schwache Lösung zusammen aus
u = u0 + uD .
52
5.2. EXISTENZ UND EINDEUTIGKEIT VON LÖSUNGEN
5.1.2
Schwache Formulierung im Diskreten
Sei T eine reguläre Partition von Ω in Kanten-zusammenhängende Vierecke. Wir verzichten hier auf Dreiecke, da a priori Abschätzungen und deren
Konstanten für Crouzeix-Raviart Elemente wohlbekannt sind. Das diskrete
Problem beinhaltet die Restriktion aQ der Bilinearform a auf ein Viereck,
aQ (u, v) := (A∇u, ∇v)L2(Q) + (b · ∇u + γu, v)L2(Q)
und die Bilinearform
aN C (u, v) :=
X
aQ (u, v)
Q∈T
für Funktionen u, v ∈ P S(T ) + H 1 (Ω). Den Raum der Park-Sheen Elemente
mit Nullrandbedingung bezeichnen wir mit
P S0 (T ) := {vP S ∈ P S(T )| ∀E ∈ E(∂Ω) : vP S (mid(E)) = 0}.
Mit der diskreten Bilinearform aN C definieren wir für stückweise H 1 -Funktionen
||| · |||N C := aN C (·, ·)1/2 sowie die Linearform
FN C := f − aN C (uD , ·).
Das diskrete Problem liest sich dann: Finde u0P S ∈ P S0 (T ) mit
aN C (u0P S , vP S ) = FN C (vP S )
(5.4)
für alle vP S ∈ P S0 (T ). Als Approximation der exakten Lösung u ergibt sich
dann uP S := u0P S + J uD ∈ P S(T ) mit dem Approximationsoperator J aus
Kapitel 4.5.
5.2
Existenz und Eindeutigkeit von Lösungen
Wir zeigen nun, dass sowohl für (5.3) als auch für (5.4) eindeutige Lösungen
existieren. Dafür nutzen wir den Satz von Lax-Milgram (Satz 3.2) und zeigen
entsprechende Eigenschaften der Bilinearformen a und aN C .
Definition 5.2 (Sprung, Mittel)
Es sei E eine innere Kante und Q1 , Q2 die zwei Elemente einer Partition
mit E = E(Q1 ) ∩ E(Q2 ). Dann ist der Sprung entlang E definiert als
[v]E (x) := v|Q1 (x) − v|Q2 (x).
Im Gegensatz dazu bezeichnet h·iE das Mittel entlang einer Kante E, d.h.
2hviE (x) := v|Q1 (x) + v|Q2 (x).
für x ∈ E.
53
KAPITEL 5. FEHLERANALYSIS
Bemerkung 5.3
Man beachte, dass der Sprung für stetige Funktionen verschwindet.
Satz 5.4 (Existenz einer eindeutigen Lösung)
Mit den obigen Voraussetzungen existiert eine eindeutige schwache Lösung
u0 ∈ H01 (Ω) zu (5.3).
Beweis. Um den Satz von Lax-Milgram anwenden zu können ist Beschränktheit
und Elliptizität der Bilinearform a zu zeigen. Offensichtlich ist a aufgrund der
Beschränktheit von A, b und γ beschränkt. H01 (Ω)-Elliptizität erhalten wir
durch partielle Integration, Eigenschaft (5.2) und der Friedrichs Ungleichung
aus Folgerung 2.5, siehe auch [CLT05].
Für das diskrete Problem erhalten wir keine globale Elliptizität, sodass wir
uns im Fall b 6= 0 auf hinreichend feine Netzweiten einschränken müssen.
Satz 5.5 (Existenz einer eindeutigen diskreten Lösung)
Sei zusätzlich zu den obigen Voraussetzungen b stückweise konstant bezüglich
der Partition T . Dann existiert zu hinreichend kleinen Netzweiten,
hmax := khkL∞ (Ω) ≤
3αmin sin ω0
,
2κβmax
(5.5)
eine eindeutige Lösung u0P S ∈ P S0 (T ) von (5.4).
Beweis. Die Beschränktheit ist trivial. Zu zeigen bleibt die Elliptizität der
Bilinearform aN C bezüglich der gebrochenen H 1 -Norm
X
k · kH 1 (Ω),N C := (k · k2L2 (Ω) + | · |2N C )1/2 mit | · |2N C =
k∇ · k2L2 (Q) .
Q∈T
Nach Bemerkung 1.7 ist hb · νE iE = b · νE konstant und der Sprung [b · νE ]E
verschwindet auf E. Partielle Integration, Eigenschaft (5.2) und die Zerlegung
des Sprungs
u2P S
[u2P S ]E
E ∈ E(∂Ω)
E ∈ E(Ω)
Abbildung 5.1: Funktion u2P S (links) an einer Randkante und Sprung [u2P S ]E
(rechts) an einer inneren Kante, wie im Beweis von Satz 5.5.
54
5.2. EXISTENZ UND EINDEUTIGKEIT VON LÖSUNGEN
[ab]E = [a]E hbiE + haiE [b]E .
ergeben
aN C (u0P S , u0P S )
ˆ
1X
b · ν (u0P S )2 ds
≥
+
2 Q∈T ∂Q
X
ˆ
1 0 2
0
2
≥ αmin|uP S |N C − b · νE [(uP S ) ]E ds
2
E
E∈E(Ω)
ˆ
1 X
0
2
− b · νE (uP S ) ds
2
E
E∈E(∂Ω)
αmin|u0P S |2N C
Sei zunächst E ∈ E(∂Ω) eine Randkante mit angrenzendem Viereck Q. Da
u0P S affin ist und im Mittelpunkt verschwindet (siehe Abbildung 5.1), gilt
2
ˆ
h3E
hE κ
h3E ∂u0P S 0
2
≤
k∇u0P S k2L2 (Q) ≤
k∇u0P S k2L2 (Q) .
(uP S ) ds =
12
∂s
12|Q|
12
sin
ω
0
E
Sei E = E(Q1 ) ∩ E(Q2 ) nun eine innere Kante und mE := mid(E) dessen
Mittelpunkt. Mit der Produktregel und der Eigenschaft, dass [u0P S ]E im Integralmittel über E verschwindet, folgt
ˆ
ˆ
ˆ
0
2
0
0
[(uP S ) ]E ds = 2 [uP S ]E huP S iE ds = 2 [u0P S ]E (hu0P S iE − u0P S (mE ))ds.
E
E
[u0P S ]E
E
hu0P S iE
u0P S (mE )
Die Funktionen
und
−
sind jeweils affin und verschwinden in mE . Somit gilt
ˆ
h3
2 [u0P S ]E (hu0P S iE − u0P S (mE ))ds ≤ E |∇u0P S |Q1 |2 + |∇u0P S |Q2 |2
6
E
hE κ
k∇N C u0P S k2L2 (Q1 ∪Q2 ) .
≤
6 sin ω0
Für Park-Sheen Funktionen gilt die diskrete Friedrichs Ungleichung analog
zu Satz 3.21,
ku0P S kL2 (Ω) ≤ CFr k∇N C u0P S kL2 (Ω) = CFr |u0P S |N C .
Zusammen mit den Abschätzungen auf inneren und äußeren Kanten zeigt
das
hmax βmax κ 0 2
aN C (u0P S , u0P S ) ≥ αmin |u0P S |2N C −
|uP S |N C
3 sin ω0
hmax βmax κ
1
αmin −
ku0P S k2H 1 (Ω),N C .
≥
2
1 + CFr
3 sin ω0
55
KAPITEL 5. FEHLERANALYSIS
Für hinreichend kleine Netzweiten nach (5.5) ergibt sich somit die Elliptizität
2
mit Konstante αmin /(2 + 2CFr
).
5.3
A Priori Fehlerabschätzung
Wir wenden uns nun der ersten Fehlerabschätzung für Park-Sheen Elemente
zu. Ziel ist eine a priori Abschätzung mit konkreten Konstanten der Form
|||u − uP S |||N C . khD2 ukL2 (Ω) .
Deshalb fordern wir für die exakte Lösung u = u0 + uD von (5.1), dass uD ∈
H 2 (Ω) sowie u0 ∈ H 2(Ω)∩H01 (Ω) gilt. Die Finite-Elemente Approximation im
Raum der Park-Sheen Elemente setzt sich zusammen aus uP S = u0P S + J uD .
Dabei ist u0P S ∈ P S0 (T ) die diskrete Lösung von (5.4) und J uD ∈ P S(T )
die Approximation der Dirichlet-Daten mit Approximationsoperator J aus
Kapitel 4.5.
Ferner sei b ∈ H(div; Ω) stückweise konstant und hmax hinreichend klein
nach (5.5).
5.3.1
Strang Lemma
Wir betrachten zunächst den Fehler |||u0 − u0P S |||N C . In Kapitel 3.3.3 haben
wir bereits festgestellt, dass bei nichtkonformen Elementen zusätzlich zum
Approximationsfehler auch ein Konsistenzfehler auftritt. Mit Bedingung (5.5)
folgt aus Satz 5.5,
αmin 2
| · |N C ≤ ||| · |||2N C .
2
(5.6)
Wir verwenden nun Satz 3.18 nach Strang. Die darin auftretenden Konstanten sind trivial und mit (5.6) können wir |||wP S |||N C im Nenner des Konsistenzfehlers durch die gebrochene H 1 -Seminorm |wP S |N C ersetzen. Für hinreichend feine Partitionen gilt also
|||u0 − u0P S |||N C ≤ 2
inf
vP S ∈P S0 (T )
+
2
αmin
|||u0 − vP S |||N C
1/2
|aN C (u0 , wP S ) − FN C (wP S )|
.
|wP S |N C
wP S ∈P S0 (T )
(5.7)
sup
Die nachfolgenden Abschnitte beschäftigen sich separat mit dem Approximations- und Konsistenzfehler.
56
5.3. A PRIORI FEHLERABSCHÄTZUNG
5.3.2
Approximationsfehler
Wir befassen uns mit dem Approximationsfehler
inf
vP S ∈P S0 (T )
|||u0 − vP S |||N C
und wollen diesen in Abhängigkeit von der Netzweite h und kD 2 u0kL2 (Ω)
abschätzen. Da J u0 ∈ P S0 (T ), ist die Energienorm von u0 − J u0 eine obere
Schranke des Approximationsfehlers. Weiter gilt
X
|||u0 − J u0 |||2N C =
|||u0 − J u0 |||2Q mit ||| · |||2Q := aQ (·, ·).
Q
Mit e := u0 −J u0 folgt aus Satz 4.29 und den darin enthaltenen Abschätzungen
(4.7) und (4.8),
ˆ
ˆ
2
A∇e · ∇e dx + (b · ∇e + γe)e dx
|||e|||Q =
Q
≤
≤
=
Q
2
αmax k∇ekL2 (Q) + βmax k∇ekL2 (Q) kekL2 (Q) + γmax kek2L2 (Q)
αmax C(θ0 )2 h2Q kD 2 u0 k2L2 (Q) + βmax C(θ0 )(2C(ω0 ) + C(θ0 )/2)h3Q kD 2 u0 k2L2 (Q)
+ γmax (2C(ω0 ) + C(θ0 )/2)2 h4Q kD 2 u0 k2L2 (Q)
αmax C(θ0 )2 khD2 u0 k2L2 (Q) + h.o.t. .
Dabei bezeichnen C(ω0 ) und C(θ0 ) die Konstanten aus Satz 4.29. Die Rechnung liefert auch Konstanten für die Terme höherer Ordnung. Aus Gründen
der Übersicht werden wir diese jedoch nicht vollständig ausschreiben. Somit
ergibt sich als obere Schranke des Approximationsfehlers
√
|||u0 − Ju0 |||N C ≤ αmax C(θ0 )khD2 u0 kL2 (Ω) + h.o.t. .
(5.8)
5.3.3
Konsistenzfehler
Dieser Abschnitt basiert auf der Rechnung aus Kapitel 3 in [PS03] und benutzt die zwei Spur Ungleichungen aus Lemma 2.11 und Lemma 2.12. Der
erste Teil führt eine Projektion von H 2 (Ω) in den Raum der stückweise konstanten Funktionen auf Kanten der Partition T ein. Am Ende werden wir
den Konsistenzfehler abschätzen können durch
√
1/2
|aN C (u0 , wP S ) − FN C (wP S )|
8κ αmax 1 + π
sup
≤ √
khD2 ukL2 (Ω) .
2
|w
|
π
3 sin ω0
P S NC
wP S ∈P S0 (T )
(5.9)
Dabei bezeichnen κ und ω0 die Quasiuniformitätskonstanten aus Kapitel 2.1.
Zu einer Aufzählung T = {Q1 , . . . , Q|T | } bezeichnet vj im Folgenden die
Restriktion von v auf das Viereck Qj und dementsprechend νj := ν|Qj .
57
KAPITEL 5. FEHLERANALYSIS
5.3.3.1
Projektion R0
Es bezeichne γj,k die Kante E(∂Qj )∩E(∂Qk ) für Kanten-zusammenhängende
Vierecke Qj , Qk und P0 (S) die Menge der Konstanten Funktionen auf S.
Damit definieren wir den Raum
Λ(T ) := {λ ∈ Πj,k P0 (γj,k ) × ΠE∈E(∂Ω) P0 (E)| λ|γj,k + λ|γk,j = 0}.
Die Projektion R0 ist dann gegeben durch
R0 : H 2 (Ω) → Λ(T )
v
7→ R0 (v)
mit
h(A∇vj ) · νj − R0 vj , ziγ = 0
für alle z ∈ P0 (γ). Dabei ist γ entweder eine innere Kante γj,k oder eine
Randkante.
Bemerkung 5.6
Damit R0 wohldefiniert ist, muss A∇v ∈ H(div, Ω) ∩ L2+ε (Ω) für ein ε > 0
gelten. Aus der Regularitätstheorie folgt diese Eigenschaft für die exakte
Lösung u.
Die Konventionen
(R0 u)|γj,k := (R0 uj )|γj,k
und (R0 u)|γk,j := (R0 uk )|γk,j ,
welche die Orientierung beinhalten, sowie A∇u ∈ H(div, Ω)∩L2+ε (Ω) führen
auf
(R0 u)|γj,k :=
γj,k
=
γj,k
=−
(A∇uj ) · νj ds
(A∇uk ) · νj ds
γk,j
(A∇uk ) · νk ds =: −(R0 u)|γk,j
(5.10)
und somit R0 u ∈ Λ(T ). Für wP S ∈ P S(T ) und benachbarte Vierecke Qj , Qk
gilt die wichtige Orthogonalität
ˆ
(5.10)
hR0 uj , wP S |Qj iγj,k + hR0 uk , wP S |Qk iγk,j =
R0 uj wP S |Qj − R0 uj wP S |Qk ds
γj,k
ˆ
= (R0 uj )|γj,k
[wP S ]γj,k ds
γj,k
= 0.
58
(5.11)
5.3. A PRIORI FEHLERABSCHÄTZUNG
Der letzte Schritt folgt aus der Linearität von wP S auf jedem Viereck und
der Stetigkeit im Mittelpunkt von γj,k .
Abschätzung von kA∇u|Q · ν|Q − R0 u|Q kL2 (∂Q)
5.3.3.2
Zu einem Viereck Q verwenden wir die Abkürzungen
gQ := A∇u|Q · ν|Q ∈ L2 (∂Ω) und gE := A∇u|Q · νE ,
Da R0 u|Q das stückweise Integralmittel von gQ auf dem Rand von Q ist,
werden wir die Poincaré Ungleichung nutzen können. Dazu müssen wir das
Integral aufspalten und betrachten die Unterteilung von Q in vier Dreiecke
durch die Diagonalen, wie in Abbildung 2.2. Diese Unterteilung ist nötig,
da gQ 6∈ H 1 (Q) aber (da νE konstant entlang E) gE ∈ H 1 (TE ). Dabei bezeichnet TE das Teildreieck von Q mit Kante E. Mit g E bezeichnen wir
das Integralmittel von gE über TE . Aus dem Satz des Pythagoras folgt
kgQ − R0 u|Q kL2 (E) ≤ kgQ − g E kL2 (E) und somit ergibt sich mit Lemma 2.11,
X
kgQ − R0 u|Q k2L2 (∂Q) ≤
kgE − g E k2L2 (E)
E∈∂Q
≤ Cspur hQ
≤ Cspur
X
k∇gE k2L2 (TE )
E∈∂Q
2
αmax hQ kD 2 uk2L2 (Q) .
(5.12)
Dabei bezeichnet Cspur die Konstante 8κ(π + 1)/(π 2 sin ω0 ) aus Lemma 2.11.
Abschätzung von |aN C (u0 , wP S ) − FN C (wP S )|
5.3.3.3
Sei nun wP S eine beliebige Funktion in P S0 (T ). Weiterhin bezeichnet uj
die Restriktion von u auf das Viereck Qj . Mit partieller Integration und der
partiellen Differentialgleichung (5.1) ergibt sich
aN C (u0 , wP S ) − FN C (wP S )
ˆ
ˆ
Xˆ
=
A∇u · ∇wP S dx +
(b · ∇u + γu)wP S dx − f wP S dx
Qj
j
(5.1)
=
Xˆ
∂Qj
j
(5.11)
=
Qj
A∇u · ν wP S ds
X
hA∇uj · νj − R0 uj , wP S |Qj i∂Qj .
j
59
Ω
KAPITEL 5. FEHLERANALYSIS
Mit der Orthogonalität (5.11) konnten wir R0 uj bei inneren Kanten hinzufügen. Bei den Randkanten nutzen wir dafür die Randbedingung von wP S .
Man beachte, dass nun die Funktion u und nicht mehr u0 auftritt. Mit der
Projektion R0 (und der daraus resultierenden Integralmittel Eigenschaft)
können beliebige stückweise (bzgl. Kanten) konstante Funktionen mj zu wP S
addiert werden:
X
aN C (u0 , wP S ) − FN C (wP S ) =
hA∇uj · νj − R0 uj , wP S |Qj − mj i∂Qj .
j
Für mj wählen wir das Integralmittel entlang der entsprechenden Kante, d.h.
zu einer Kante E von Qj setzen wir
mj |E :=
E
wP S |Qj ds = wP S (mid(E)).
Die Cauchy-Schwarz Ungleichung für Integrale und Summen ergibt dann für
den absoluten Betrag
|aN C (u0 , wP S ) − FN C (wP S )|
X
1/2
−1/2
hQj kA∇uj · νj − R0 uj kL2 (∂Qj ) hQj kwP S |Qj − mj kL2 (∂Qj ) ≤
j
!1/2
!1/2
X
X
2
≤
hQj kA∇uj · νj − R0 uj k2L2 (∂Qj )
h−1
.
Qj kwP S − mj kL2 (∂Qj )
j
|
j
{z
}
1
|
Der erste Teil wird direkt mit (5.12) abgeschätzt,
1 ≤
{z
2
}
2
8κ αmax
π+1
khD2 uk2L2 (Ω) .
sin ω0
π2
Für den zweiten Teil nutzen wir Lemma 2.12, die Spur Ungleichung für affine
Funktionen auf Vierecken. Es ergibt sich die obere Schranke
X κ
κ
2 ≤
k∇wP S kL2 (Qj ) =
|wP S |2N C
3
sin
ω
3
sin
ω
0
0
j
mit der gebrochenen H 1 -Halbnorm | · |N C . Insgesamt gilt demnach
√
1/2
8κ αmax π + 1
khD2 ukL2 (Ω) |wP S |N C .
|aN C (u0 , wP S ) − FN C (wP S )| ≤ √
2
π
3 sin ω0
Da wP S ∈ P S0(T ) beliebig gewählt war, folgt die behauptete Abschätzung
(5.9) des Konsistenzfehlers.
60
5.4. A POSTERIORI FEHLERSCHÄTZER
5.3.4
Resultat
Für stückweise konstantes b und kleine Netzweiten im Sinne von (5.5) ergibt
sich mit dem Strang Lemma (5.7), dem Approximationsfehler (5.8) und dem
Konsistenzfehler (5.9) die a priori Abschätzung
√
|||u0 − u0P S |||N C ≤ 2 αmax C(θ0 )khD2 u0kL2 (Ω) + Ckon khD2 ukL2 (Ω) + h.o.t. .
(5.13)
Dabei sind die Konstanten gegeben durch
C(θ0 ) =
1/4 + 2/π 2
1 − | cos θ0 |
1/2
und Ckon
4κ αmax
=√
3αmin sin ω0
π+1
π2
1/2
.
Sofern a(uD − J uD , uD − J uD ) positiv ist, kann man den Approximationsfehler der Randdaten |||uD − J uD |||N C wie in Kapitel 5.3.2 abschätzen durch
|||uD − J uD |||N C ≤
√
αmax C(θ0 )khD2 uD kL2 (Ω) + h.o.t. .
Im Fall b = 0 entfällt die Bedingung an die Netzweite und ||| · |||N C erfüllt
die Dreiecksungleichung. Somit ist ||| · |||N C eine Norm auf H01 (Ω) ∪ P S0(T )
und eine Halbnorm auf H 1 (Ω) ∪ P S(T ). In diesem Fall gilt
|||u − uP S |||N C ≤ |||u0 − u0P S |||N C + |||uD − J uD |||N C
√
≤ 2 αmax C(θ0 )khD2 u0 kL2 (Ω) + Ckon khD2 ukL2 (Ω)
√
+ αmax C(θ0 )khD2 uD kL2 (Ω) + h.o.t. .
Beispiel 5.7 (Poisson-Gleichung)
Für das Poisson-Problem
−∆u = f in Ω = (0, 1)2,
u = 0 auf ∂Ω,
und einer uniformen Partition in Quadrate, also κ = 1 und ω0 = θ0 = π/2,
ergibt sich somit die a priori Abschätzung
|||u − uP S |||N C ≤ 2,85 khD2 ukL2 (Ω) .
5.4
A Posteriori Fehlerschätzer
Berechenbare obere Schranken des Fehlers dienen als Abbruchkriterium für
numerische Verfahren. Zudem bildet es die Grundlage adaptiver Algorithmen,
61
KAPITEL 5. FEHLERANALYSIS
bei denen Fehler gezielt reduziert werden und somit Freiheitsgrade gegenüber
der uniformen Verfeinerung eingespart werden.
In [Gra03, GHT04] wird ein dual gewichteter a posteriori Fehlerschätzer vorgestellt. Wir verfolgen hier den Residuen-basierten Ansatz und werden Zuverlässigkeit des Fehlerschätzers zeigen. Dazu werden weitere Einschränkungen
an der Partition sowie am Diffusionskoeffizienten A nötig sein.
5.4.1
Gemischte Formulierung
Für den Residuen-basierten Ansatz aus [Car05, CH07] benötigen wir die gemischten Methoden aus Kapitel 3.4. Wie zuvor betrachten wir die elliptische
part. Dgl. (5.1) mit Voraussetzungen wie in Kapitel 5.1. u = u0 + uD mit
u0 ∈ H01 (Ω), uD ∈ H 2 (Ω) bezeichnet die exakte Lösung, uP S = u0P S + J uD
mit u0P S ∈ P S0 (T ) die diskrete Lösung.
Bemerkung 5.8
Es sei erinnert, dass die Park-Sheen Approximation u0P S ∈ P S0 (T ) nach (5.4)
die Gleichheit
ˆ
A∇N C u0P S · ∇N C vP S + b · ∇N C u0P S vP S + γu0P S vP S dx
Ω
ˆ
ˆ
=
f vP S dx −
A∇uD · ∇N C vP S + b · ∇uD vP S + γuD vP S dx,
Ω
Ω
(5.14)
für alle vP S ∈ P S0(T ) erfüllt. Dabei bezeichnet ∇N C den stückweisen Gradienten.
Zusätzlich fordern wir in diesem Kapitel, dass der Diffusionskoeffizient A
bzgl. der Partition T stückweise konstant ist, d.h.
A ∈ [P0 (T )]2×2 .
Später werden wir uns zudem auf Partitionen aus Drei- und Rechtecken einschränken müssen. Wir definieren die zwei Hilberträume
X := [L2 (Ω)]2
und
Y := H01 (Ω),
sowie die drei Bilinearformen
a : X × X → R,
b : X × Y → R,
62
c : Y × Y → R,
5.4. A POSTERIORI FEHLERSCHÄTZER
durch
ˆ
(A−1 p) · q dx
Ω
ˆ
b(p, v) := − p · ∇v dx
ˆ Ω
c(u, v) := (b · ∇u + γu)v dx.
a(p, q) :=
Ω
Dann lässt sich die schwache Form von (5.1) schreiben als: Finde ein Paar
(p, u0 ) ∈ X × Y , sodass
a(p, q) + b(q, u0 ) = 0
b(p, v) − c(u0 , v) = G(v)
für alle q ∈ X,
für alle v ∈ Y.
(5.15)
Dabei bezeichnet G das lineare Funktional
ˆ
ˆ
G(v) := − f v dx +
A∇uD · ∇v + (b · ∇uD + γuD )v dx,
Ω
Ω
welches auch die Dirichlet-Randdaten beinhaltet. Für die Existenz schwacher Lösungen zeigen wir die Nicht-Degeneriertheit (Lemma 5.9) sowie die
Erfüllung der inf-sup Bedingung (Lemma 5.10) der Bilinearform
B : (X × Y ) × (X × Y ) → R,
B((p, u), (q, v)) = a(p, q) + b(q, u) + b(p, v).
(5.16)
Die Existenz und Eindeutigkeit der Lösung folgt dann aus Satz 3.27, da
die Bilinearform c stetig und positiv semidefinit ist. Letzteres folgt aus der
Beschränktheit von b und γ sowie (5.2).
Lemma 5.9 (Nicht-Degeneriertheit)
Die Bilinearform B aus (5.16) ist nicht-degeneriert.
Beweis. Es ist zu zeigen, dass zu jedem Paar (q, v) ∈ X × Y , (q, v) 6= 0 ein
Paar (p, u) ∈ X × Y existiert mit B((p, u), (q, v)) 6= 0. Sei zunächst q 6= 0.
Die Wahl p := q und u := −v führt mit der positiven Definitheit von A auf
ˆ
B((p, u), (q, v)) = B((q, −v), (q, v)) = (A−1 q) · q dx > 0.
Ω
Im Fall q = 0 muss v 6= 0 gelten und p := −∇v ∈ X zeigt die Behauptung.
63
KAPITEL 5. FEHLERANALYSIS
Lemma 5.10 (Inf-sup Bedingung)
2
2
Sei ᾱ := (αmin
+ 1)/αmin
. Dann erfüllt die Bilinearform B aus (5.16) die
inf-sup Bedingung
0<β=
inf
sup
(p,u)∈X×Y (q,v)∈X×Y
B((p, u), (q, v))
k(p, u)k k(q, v)k
mit k(p, u)k2 := kpk2L2 (Ω) + |u|2H 1 (Ω) und β ≥ 1/(αmax ᾱ + 2).
Beweis. Mit der speziellen Wahl v := −αmax ᾱu und q := αmax ᾱp − 2∇u
sowie der Young Ungleichung zum Parameter 1/αmin , ergibt sich
B((p, u), (q, v)) = αmax ᾱa(p, p) − 2a(p, ∇u) − 2b(∇u, u)
2
kpkL2 (Ω) k∇ukL2 (Ω) + 2k∇uk2L2(Ω)
≥ ᾱkpk2L2 (Ω) −
αmin
2
≥ (ᾱ − 1/αmin
)kpk2L2 (Ω) + k∇uk2L2(Ω)
= k(p, u)k2.
Die Rechnung
2
k(q, v)k2 = kαmax ᾱp − 2∇uk2 + αmax
ᾱ2 k∇uk2L2 (Ω) ≤ (αmax ᾱ + 2)2 k(p, u)k2
zeigt schließlich, dass zu jedem Paar (p, u) ein Paar (q, v) existiert mit
1
k(p, u)kk(q, v)k ≤ B((p, u), (q, v)).
αmax ᾱ + 2
Als Konsequenz handelt es sich bei der Abbildung
L:
X×Y
(p, u0)
→
7
→
X∗ × Y ∗
(0, G)
um einen Isomorphismus und es gilt
ku0 − uℓ kY + kp − pℓ kX ≈ k0 − a(pℓ , ·) − b(·, uℓ)kX ∗ + kG − b(pℓ , ·) + c(uℓ, ·)kY ∗
für jede Approximation (uℓ , pℓ ) ∈ X × Y von (u0 , p). Den ersten Teil der
rechten Seite nennen wir Inkonsistenz Residuum, den zweiten Gleichgewichts
Residuum.
Wir wollen den Energiefehler kA(∇u − ∇N C uP S )kL2 (Ω) abschätzen, müssen
aber beachten, dass die diskrete Lösung uP S nicht in H01 (Ω) = Y liegt. Somit
können wir diese nicht in uℓ einsetzen. Stattdessen werden wir eine stetige und
stückweise affine Approximation von uP S konstruieren, siehe Kapitel 5.4.2.
64
5.4. A POSTERIORI FEHLERSCHÄTZER
Für pℓ können wir direkt mit dem stückweisen Gradienten der diskreten
Lösung arbeiten und definieren
pℓ := A∇N C uP S − A∇uD ∈ X = [L2 (Ω)]2 .
(5.17)
Unter Verwendung der gemischten Formulierung (5.15) erhalten wir damit
kA(∇u − ∇N C uP S )kL2 (Ω) = kA(∇u0 ) − pℓ kL2 (Ω) = kp − pℓ kX .
Daher kann der Energiefehler durch die beiden Residuen abgeschätzt werden.
5.4.2
Inkonsistenz Residuum
Um das Inkonsistenz Residuum zu berechnen, konstruieren wir eine Näherung
zur diskreten Lösung u0P S , die in Y = H01 (Ω) liegt. Diese nennen wir uℓ und
erhalten mit dem Rieszschen Darstellungssatz und (5.17),
ˆ
−1
k0 − a(pℓ , ·) − b(·, uℓ )kX ∗ = (∇uℓ − A pℓ ) · dx
Ω
X∗
= k∇uℓ − ∇N C uP S + ∇uD kL2 (Ω)
≤ k∇N C (uℓ − u0P S )kL2 (Ω) + k∇N C (uD − J uD )kL2 (Ω)
=: ηT + ηD .
(5.18)
Motiviert durch [CM10], definieren wir eine Verfeinerung T ∗ der Partition T
auf folgende Weise, vergleiche Abbildung 5.2:
• teile jedes Dreieck aus T in vier Teildreiecke durch Verbindung der
Kantenmittelpunkte,
• teile jedes Viereck aus T in vier Dreiecke und ein Parallelogramm durch
Verbindung der Mittelpunkte benachbarter Kanten.
Auf der neuen Partition T ∗ definieren wir uℓ ∈ P1 (T ∗ ) ∩ C(Ω) ∩ H01 (Ω) durch
Vorgabe von Werten an den Knoten
N (T ∗ ) = N (T ) ∪ mid(E(T )).
An den neu entstandenen Knoten z ∈ mid(E(T )) setzen wir uℓ (z) = u0P S (z).
Dies ist wohldefiniert, da u0P S stetig in diesen Punkten ist, und stellt sicher,
dass die Diagonalregeln der Parallelogramme erfüllt ist. Für Randknoten
z ∈ N (∂Ω) wird uℓ = 0 gefordert, um die Nullranddaten zu gewährleisten.
65
KAPITEL 5. FEHLERANALYSIS
z
T∗
Abbildung 5.2: Aus T verfeinerte Partition T ∗ um uℓ ∈ H01 (Ω) als Näherung
von u0P S zu konstruieren.
An allen anderen Knoten z ∈ N (T ) \ N (∂Ω) lösen wir ein lokales Problem,
d.h. wir setzen uℓ (z) so, dass
ˆ
ωz∗
∇uℓ ·
∇ϕ∗z
dx =
ˆ
ωz∗
∇u0P S · ∇ϕ∗z dx
erfüllt ist. Dabei bezeichnet ϕ∗z ∈ P1 (T ∗ ) ∩ C(Ω) die Hutfunktion zum Knoten z bzgl. T ∗ und ωz∗ den Knotenpatch der verfeinerten Partition, ωz∗ :=
supp(ϕ∗z ). Gelöst wird also ein Poisson-Problem mit einem Freiheitsgrad, dessen Randwerte durch u0P S an den Kantenmittelpunkten gegeben sind.
5.4.3
Gleichgewichts Residuum
Im zweiten Schritt suchen wir eine Abschätzung der Dualnorm des Gleichgewichts Residuums. Dieses ist definiert durch
Res(v) := −G(v) + b(pℓ , v) − c(uℓ , v)
ˆ
= (f v − pℓ · ∇v − b · ∇uℓ v − γuℓ v) dx
Ω ˆ
−
A∇uD · ∇v + b · ∇uD v + γuD v dx.
(5.19)
Ω
Auf dem diskreten Raum P S(T ) definieren wir Res entsprechend mit dem
stückweisen Gradienten. Nach [CH07] werden zwei Approximationsoperatoren benötigt.
66
5.4. A POSTERIORI FEHLERSCHÄTZER
5.4.3.1
Konformer Approximationsoperator
Als ersten Approximationsoperator betrachten wir eine Abbildung I von
H01 (Ω) in den konformen Finite-Elemente-Raum der global stetigen und lokal linearen (auf Dreiecken) bzw. bilinearen (auf Vierecken) Funktionen aus
Kapitel 3.3.2. Dabei sollen die Nullranddaten erhalten werden. Dazu sei
(P1 Q1 )0 (T ) := {v ∈ C(Ω)| ∀T ∈ T , T Dreieck : v|T ∈ P1 (T ),
∀Q ∈ T , Q Viereck : v|Q ∈ Q1 (Q),
v(N (∂Ω)) = 0}.
Der Approximationsoperator ist dann von der Form
I : H01 (Ω) → (P1 Q1 )0 (T ).
Bemerkung 5.11
Da Funktionen in H01 (Ω) im Allgemeinen nicht stetig sind, können wir für I
nicht den nodalen Interpolationsoperator aus Definition 3.16 benutzen. Eine
mögliche Wahl wäre der Oswald Operator, der die Knotenwerte durch das
Integralmittel über den Knotenpatch definiert. Der Knotenpatch bezeichnet
die Vereinigung aller anliegenden Elemente.
Für spätere Rechnungen haben wir zwei Anforderungen an den Operator I.
Sei dazu v eine beliebige Funktion in H01 (Ω).
Approximationseigenschaft und H 1 -Stabilität: Für jedes Element T ∈
T und Elementpatch
[
ωT :=
{K ∈ T | N (K) ∩ N (T ) 6= ∅}.
gilt
−1/2
h−1
T kv − IvkL2 (T ) + hT
kv − IvkL2 (∂T ) + k∇(Iv)kL2 (T ) . k∇vkL2 (ωT ) .
(5.20)
Quasiorthogonalität: Für jede Funktion f ∈ L2 (Ω) gilt
1/2
ˆ
X
(v − Iv)f dx . k∇vkL2 (Ω)
diam(Ωz )2 kf − fk2L2 (Ωz )
Ω
z∈N (Ω)
=: k∇vkL2 (Ω) osc(f, {Ωz }).
(5.21)
Dabei bezeichnet Ωz ⊂ Ω eine lokales Gebiet
um den Knoten z ∈ N , welS
ches zumindest den Knotenpatch ωz =
{T ∈ T | z ∈ N (T )} beinhaltet.
67
KAPITEL 5. FEHLERANALYSIS
Tatsächlich werden Ωz und ωz für Knoten übereinstimmen, die weit im Inneren des Gebietes Ω liegen. Ferner ist f das stückweise Integralmittel bzgl. der
Gebiete Ωz . Man beachte, das die Oszillationen von f im Falle von f ∈ H 1 (Ω)
nach Poincaré Ungleichung von höherer Ordnung sind.
Ein Approximationsoperator, der alle oben genannten Eigenschaften erfüllt,
ist der gewichtete Approximationsoperator aus Definition 2.2 in [Car97]. Da
wir nur die Existenz eines solchen Operators verwenden, gehen wir nicht weiter auf diesen ein. Auch für eine genaue Definition der Mengen Ωz sei auf
[Car97] verwiesen.
5.4.3.2
Nichtkonformer Approximationsoperator
Der zweite Approximationsoperator soll eine Abbildung des konformen FiniteElemente-Raums (P1 Q1 )0 (T ) in den Raum der Park-Sheen Elemente darstellen. Da P1 Q1 (T ) ⊂ C(Ω) gilt, eignet sich dazu der nichtkonforme Approximationsoperator J aus Kapitel 4.5. Spezielle Eigenschaften für den auf
(P1 Q1 )0 (T ) eingeschränkten Operator J sind im folgenden Lemma zusammengefasst. Dabei müssen wir uns auf Partitionen T in Drei- und Rechtecke
beschränken.
Lemma 5.12 (Eigenschaften von J )
Sei T eine reguläre Partition des beschränkten Lipschitz-Gebietes Ω in Dreiund Rechtecke. J : (P1 Q1 )0 (T ) → P S0 (T ) bezeichne den nichtkonformen
Approximationsoperator aus Definition 4.25, eingeschränkt auf Funktionen
in (P1 Q1 )0 (T ). Dann gelten für eine beliebige Funktion vh ∈ (P1 Q1 )0 (T )
und alle Elemente K ∈ T die Eigenschaften
(a)
(b)
(c)
k∇J vh kL2 (K) ≤ k∇vh kL2 (K) ,
ˆ
ˆ
J vh dx =
vh dx,
K
Kˆ
∀ph ∈ [P0 (T )]2 :
ph · ∇(vh − J vh ) dx = 0,
K
(d)
h−1
K kvh − J vh kL2 (K) . k∇vh kL2 (K) .
Beweis. Teil (a) und (b) folgen durch Nachrechnen der Eigenschaft auf
Rechtecken für die vier Basisfunktionen von (P1 Q1 )(K). Auf Dreiecken gilt
vh = J vh . Teil (c) folgt mit dem Gaußschen Integralsatz aus der Eigenschaft,
dass auf jeder Kante E ∈ E(K) die Identität
ˆ
ˆ
vh ds = vh (mid(E)) = J vh (mid(E)) =
J vh ds
E
E
68
5.4. A POSTERIORI FEHLERSCHÄTZER
gilt. Bei Teil (d) handelt es sich um eine direkte Folgerung aus (a), (b) und
der Poincaré Ungleichung (2.1).
5.4.3.3
Residuum auf P S0 (T )
Die wichtigste Eigenschaft eines Residuums ist eigentlich, dass der FiniteElemente-Raum Teil seines Kerns ist. Dies gilt allerdings nicht für das Gleichgewichts Residuum in (5.19) und den Raum P S0 (T ). Stattdessen erhalten
wir für ein vP S ∈ P S0 (T ) und pℓ aus (5.17), da u0P S als diskrete Lösung
(5.14) erfüllt,
Res(vP S ) =
ˆ
A∇N C u0P S ∇N C vP S + b · ∇N C u0P S vP S + γu0P S vP S dx
ˆ
−
pℓ · ∇N C vP S + b · ∇uℓ vP S + γuℓ vP S dx
Ω
Ω
=
ˆ
A∇N C (uD − J uD ) · ∇N C vP S dx
ˆ
+ b · ∇N C (u0P S − uℓ )vP S dx + γ(u0P S − uℓ )vP S dx
Ω
Ω
. ηD k∇N C vP S kL2 (Ω) + ηT kvP S kL2 (Ω) .
Dabei bezeichnen ηD und ηT die Fehlerschätzer aus (5.18). Der letzte Schritt
folgt aus der Beschränktheit von A, b und γ sowie einer Knotenpatch-weise
angewandten Friedrichs Ungleichung. Wir sind nun an Funktionen der Form
J Iv für v ∈ H01 (Ω) interessiert. Mit der Friedrichs Ungleichung, der Approximationseigenschaft (5.20) und Lemma 5.12(d) folgt
kJ IvkL2 (Ω) ≤ kvkL2 (Ω) + kv − IvkL2 (Ω) + kIv − J IvkL2 (Ω)
. k∇vkL2 (Ω) + kh∇vkL2 (Ω) + kh∇vkL2 (Ω) .
Dabei bezeichnet h ∈ L∞ (Ω) wieder die Funktion mit h|T = hT für alle
T ∈ T . Setzen wir J Iv ∈ P S0 (T ) in das Residuum ein, so erhalten wir mit
der Rechnung oben und den Approximationseigenschaften
Res(J Iv) . ηD k∇vkL2 (Ω) + ηT k∇vkL2 (Ω) + h.o.t. .
5.4.3.4
(5.22)
Abschätzung der Dualnorm
Im letzten Schritt der a posteriori Fehlerabschätzung wollen wir Res(v) für
v ∈ H01(Ω) in Abhängigkeit der H 1 -Seminorm von v abschätzen. Dazu nutzen
69
KAPITEL 5. FEHLERANALYSIS
wir die oben zusammengetragenen Eigenschaften der beiden Approximationsoperatoren und (5.22). Zunächst berechnen wir
Res(v − J Iv)
(5.23)
ˆ
ˆ
= (f − b · ∇uℓ − γuℓ )(v − Iv) dx + (f − b · ∇uℓ − γuℓ )(Iv − JIv) dx
|Ω
{z
} |Ω
{z
}
−
1
ˆ
ˆ
2
A∇N C uP S · ∇N C (v − JIv) dx − (b · ∇uD + γuD )(v − JIv) dx .
|
{z
} |Ω
{z
}
Ω
3
4
Wir betrachten nun die vier Terme separat. Für die Abschätzung des ersten
Terms nutzen wir die Quasiorthogonalität (5.21) und erhalten direkt
1 . (osc(f, {Ωz }) + osc(b · ∇uℓ , {Ωz }) + osc(γuℓ , {Ωz })) k∇vkL2 (Ω) .
(5.24)
Dabei können, für geeignete Daten f , b und γ, die Oszillationen von höherer
Ordnung sein. Dies ist der Fall, wenn die Voraussetzungen der Poincaré Ungleichung erfüllt sind. Für den zweiten Term nutzen wir Lemma 5.12(b),
d.h. die stückweise Integralmittel Eigenschaft von Iv − J Iv, mit der wir
stückweise konstante Funktionen (wie das Integralmittel) addieren können.
Gefolgt von der Cauchy-Schwarz Ungleichung, Lemma 5.12(d) und (5.20)
gilt dann
2 =
ˆ
Ω
ˆ
(f − f¯)(Iv − JIv) dx − (b · ∇uℓ − b · ∇uℓ )(Iv − JIv) dx
Ω
ˆ
− (γuℓ − γuℓ )(Iv − JIv) dx
Ω
≤ (kh(f − f¯)kL2 (Ω) + kh(b · ∇uℓ − b · ∇uℓ )kL2 (Ω)
+ kh(γuℓ − γuℓ )kL2 (Ω) ) kh−1 (Iv − JIv)kL2 (Ω)
. (osc(f ) + osc(b · ∇uℓ ) + osc(γuℓ )) k∇vkL2 (Ω) .
(5.25)
Man beachte, dass die Oszillationen in (5.25) durch elementweise Integralmittel entstanden sind und daher kleiner sind als die Oszillationen in (5.24).
Zur Abschätzung des dritten Terms verwenden wir zunächst Lemma 5.12(c),
um v − J Iv auf v − Iv zu reduzieren. Anschließend integrieren wir partiell
und nutzen den Fakt, dass A∇N C uP S elementweise konstant ist. Es gilt also
div(A∇N C uP S ) = 0. Mit Cauchy-Schwarz und der H 1 -Approximationseigen70
5.4. A POSTERIORI FEHLERSCHÄTZER
schaft (5.20) führt das auf
ˆ
ˆ
3 =
A∇N C uP S · ∇(v − Iv) dx + A∇N C uP S · ∇N C (Iv − JIv) dx
Ω
Ω
X ˆ
=
[A∇uP S ]E · νE (v − Iv) ds
E
E∈E(Ω)
≤
X
E∈E(Ω)
.
−1/2
1/2
khE [A∇uP S ]E · νE kL2 (E) khE
X
E∈E(Ω)
1/2
hE k[A∇uP S ]E · νE k2L2 (E)
(v − Iv)kL2 (E)
k∇vkL2 (Ω)
=: ηE k∇vkL2 (Ω) .
(5.26)
Dabei bezeichnet νE den Normaleneinheitsvektor und [·]E den Sprung entlang
einer Kante E ∈ E. Der letzte Term liefert wieder Oszillationen. Dazu nutzen
wir die gleichen Techniken wie schon bei den ersten beiden Termen,
4 . (osc(b · ∇uD , {Ωz }) + osc(γuD , {Ωz })) k∇vkL2 (Ω) .
(5.27)
Insgesamt erhalten wir für das Gleichgewichts Residuum mit der Zerlegung
(5.23), den Abschätzungen (5.24)-(5.27) und Eigenschaft (5.22) die obere
Schranke
k Res kY ∗ =
.
Res(v)
v∈H01 (Ω)\{0} kvkH 1 (Ω)
sup
Res(v − J Iv) + (ηT + ηD )k∇vkL2 (Ω)
+ h.o.t.
kvkH 1 (Ω)
v∈H01 (Ω)\{0}
sup
. ηT + ηE + ηD
+ osc(f, {Ωz }) + osc(b · ∇uℓ , {Ωz }) + osc(γuℓ , {Ωz })
+ osc(b · ∇uD , {Ωz }) + osc(γuD , {Ωz }) + h.o.t. .
(5.28)
5.4.4
Resultat
Mit den Abschätzungen (5.18) und (5.28) erhalten wir für den Energiefehler
eine obere Schranke der Form
kA(∇u − ∇N C uP S )kL2 (Ω) = kp − pℓ kX
. ηT + ηE + ηD
+ osc(f, {Ωz }) + osc(b · ∇uℓ , {Ωz }) + osc(γuℓ , {Ωz })
+ osc(b · ∇uD , {Ωz }) + osc(γuD , {Ωz }) + h.o.t. .
71
KAPITEL 5. FEHLERANALYSIS
Diese Schranke ist eine berechenbare Größe und stellt damit einen zuverlässigen
Fehlerschätzer dar. Wie schon bei der a priori Abschätzung betrachten wir
als Beispiel das Poisson-Problem mit homogenen Nullranddaten.
Beispiel 5.13 (Poisson-Gleichung)
Für das Poisson-Problem mit rechter Seite f ≡ 1, d.h.,
−∆u = 1 in Ω = (0, 1)2 ,
u = 0 auf ∂Ω,
erhalten wir als zuverlässigen Fehlerschätzer
k∇u − ∇N C uP S kL2 (Ω) . ηT + ηE + h.o.t.,
da sowohl der Approximationsfehler der Randdaten ηD als auch die Oszillationen verschwinden. Zur Berechnung von
ηT = k∇N C (uℓ − uP S )kL2 (Ω)
müssen wir zusätzlich die stetige Approximation uℓ , wie in Kapitel 5.4.2 beschrieben, konstruieren. Der zweite Fehlerterm beinhaltet die Kantensprünge
in Normalenrichtung.
72
Kapitel 6
Numerische Beispiele
In diesem letzten Kapitel betrachten wir vier Beispiele zu Park-Sheen Elementen. Dabei sollen die Fehlerabschätzungen aus Kapitel 5 genauer untersucht werden. Das erste Beispiel beschäftigt sich mit der Konstante der a
priori Abschätzung bei langgezogenen Rechtecken, also mit großem Parameter κ. Es folgt ein Beispiel aus der Homogenisierung, welches den a posteriori
Fehlerschätzer testet. Zum Abschluss nutzen wir die Verallgemeinerung der
Park-Sheen Elemente durch Verwendung einer Partition mit Loch sowie einer
Partition aus Drei- und Vierecken.
6.1
Bemerkungen zur Implementierung
Die in Kapitel 4 vorgestellte Basis des Raums der Park-Sheen Elemente sowie der Fehlerschätzer aus Kapitel 5.4 wurden in Matlab implementiert.
Dies ermöglicht das Lösen elliptischer part. Dgln. mit entsprechenden Voraussetzungen mithilfe der nichtkonformen Finite-Elemente-Methode auf Partitionen in Drei- und Vierecke mit stückweise affinen Funktionen. Grundlage der Implementierung bildete dabei das AFEM Software Paket, welches
in der Arbeitsgruppe von Prof. Carstensen entstanden ist, siehe [CGK+ 10].
Dementsprechend wurde weitestgehend die dort verwendete Datenstruktur
übernommen und auf Vierecke erweitert. Die Geometrie und dessen Partition werden auf folgende Weise verwaltet:
c4n (coordinates for nodes) ist eine |N | × 2 Matrix, in der jede Zeile einen
Knoten repräsentiert. Eine Zeile enthält jeweils die x- und y-Koordinate eines Knotens.
n4e (nodes for elemens) ist eine |T | × 4 Matrix, die die Partition beschreibt.
Jede Zeile repräsentiert dabei genau ein Viereck bzw. Dreieck, indem es die
73
KAPITEL 6. NUMERISCHE BEISPIELE
Knotennummern der Eckpunkte speichert. Im Falle eines Dreiecks stimmen
der erste und letzte Eintrag überein. Die Knoten werden stets gegen den
Uhrzeigersinn aufgelistet.
n4Db (nodes for Dirichlet boundary) ist eine |ED | × 2 Matrix, die die Endpunkte der Dirichlet-Kanten speichert. Dabei werden auch hier die Knotennummern gegen den Uhrzeigersinn angeordnet.
6.2
Beispiel 1: Anisotrope Rechtecke
Wir beginnen mit einem Experiment zur a priori Fehlerabschätzung aus Kapitel 5.3. Für die Berechnung von (5.13) gingen wir vom allgemeinsten Fall
aus. Somit ist zu erwarten, dass der Energiefehler auf einfachen“ Gebieten
”
stark überschätzt wird. Wir wollen nun speziell die Rolle des κ, dem maximalen Quotienten
|längste Kante von Q|
|kürzeste Kante von Q|
aller Elemente Q einer Partition T untersuchen, siehe Kapitel 2.1.
Abbildung 6.1: Partitionen von Ω = (0, 1)2 für N = 8 mit (links oben) β = 1,
κ = 1, (rechts oben) β = 1,5, κ = 4,1, (links unten) β = 2, κ = 15 bzw.
(rechts unten) β = 3, κ = 169.
74
6.2. BEISPIEL 1: ANISOTROPE RECHTECKE
β
1,0
1,5
2,0
2,5
3,0
κ
1
4,6
19
73,2
271
a priori Schranke
1,2
2,9
10,4
40,2
156,0
exakter Fehler
0,0110
0,0043
0,0051
0,0067
0,0086
Tabelle 6.1: Vergleich zwischen exaktem Fehler |||u−uP S |||N C und der Fehlerabschätzung (6.2) (bis auf Quadraturfehler) bei steigenden β und konstanten
N = 10.
Zu A = 2I, b = (1, 1) und γ = 0 betrachten wir das elliptische Randwertproblem aus Kapitel 5,
−2∆u + ∂x u + ∂y u = f in Ω = (0, 1)2 ,
u = 0 auf ∂Ω
(6.1)
mit exakter Lösung
u(x, y) = (1 − x)4 (1 − y)4 sin(πx) cos(πy − π/2).
Die rechte Seite f wird dementsprechend gewählt. Mit diskreter Lösung
uP S ∈ P S0 (T ) erhalten wir aus (5.13), mit der dort definierten Konstante C(θ0 ), eine obere Schranke für den Energiefehler,
√
8κ
1/2
khD2 ukL2 (Ω) .
(6.2)
8C(θ0 ) + √ (π + 1)
|||u − uP S |||N C ≤
6π
1
0.9
0.8
0.06
0.7
0.04
0.6
0.5
0.02
0.4
0
0.3
1
0.2
−0.02
0
0.1
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.8
0.6
0.2
0.4
0.4
0.6
0.8
0.2
1
0
Abbildung 6.2: Diskrete Lösung auf der Partition zu Parametern N = 30
und β = 1,7. Der Fehler in der Energienorm liegt bei 0,0005.
Um die Lösung stärker bei der Ecke (0, 0) aufzulösen, nutzen wir graduierte Netze, siehe Abbildung 6.1. Dazu betrachten wir zu einem Parameter
75
KAPITEL 6. NUMERISCHE BEISPIELE
β ∈ R, β ≥ 1 die Funktion xβ und deren Funktionswerte bei 0, N1 , N2 , . . . , 1.
Zeichnet man diese Werte bei den Randkanten ein und verbindet man Gegenüberliegende, so erhält man eine Partition von Ω = (0, 1)2. Allerdings
entstehen dadurch stark verformte Rechtecke, κ wird also groß und (6.2) liefert kein brauchbares Ergebnis mehr.
Es bleibt die Frage, ob uP S trotzdem eine gute Näherung zu u ist. Tabelle 6.1
zeigt, dass uP S schon bei einem sehr groben Netz eine gute Approximation
liefert. Der Parameter κ tritt demnach in diesem Beispiel nicht kritisch im
Energiefehler auf. Die Tabelle zeigt außerdem, dass für β Werte um 1,5 sinnvoll sind. Abbildung 6.2 zeigt die diskrete Lösung zu β = 1,7 und N = 30.
6.3
Beispiel 2: Geschichtetes Material
In diesem Abschnitt betrachten wir ein zweidimensionales Beispiel der Homogenisierung. Dabei werden wir den in Kapitel 5.4 hergeleiteten Fehlerschätzer
verwenden. Sei Ω = (0, 1)2 das Einheitsquadrat, welches geschichtetes Material repräsentiert. Wir betrachten nur Materialveränderung in x-Richtung
und suchen das effektive Verhalten der partiellen Differentialgleichung
− div(Aε · ∇uε ) = f in Ω,
uε = 0 auf ∂Ω
(6.3)
für ε → 0. Dabei gilt Aε (x, y) = aε (x)I mit der Einheitsmatrix I und, für
Konstanten A und B,
(
A falls x/ε (mod 1) ≤ 1/2,
aε (x) =
B sonst.
Bevor wir uns mit der speziellen Wahl der rechten Seite f beschäftigen, befassen wir uns mit dem effektiven Verhalten des Materials, welches durch
den effektiven Diffusionskoeffizienten beschrieben wird. Gesucht ist also eine
Matrix Aeff , sodass die Lösungen uε von (6.3) für ε → 0 schwach gegen die
Lösung des Problems
− div(Aeff · ∇u) = f in Ω,
u = 0 auf ∂Ω
(6.4)
konvergieren. Die Berechnung von Aeff ist Teil der Homogenisierung und kann
beispielsweise mit dem Konzept der Γ-Konvergenz analysiert werden, siehe
[Bra02]. Wir nutzten hier das Ergebnis von Seite 193 aus [PS08], welches
besagt, dass Aeff die Form
2(A−1 + B −1 )−1
0
Aeff =
0
(A + B)/2
76
6.3. BEISPIEL 2: GESCHICHTETES MATERIAL
0.2
0.3
0.25
0.15
0.2
0.1
0.15
0.1
0.05
0.05
0
0
−0.05
1
−0.05
1
0.5
0.5
0
0
0.2
0.4
0.6
0.8
1
0
0.2
0
0.4
0.6
0.8
1
0.8
1
0.16
0.15
0.14
0.1
0.12
0.05
0.08
0.1
0.06
0.04
0
0.02
−0.05
1
0
−0.02
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
0.5
1
0
0
0.2
0.4
0.6
Abbildung 6.3: Diskrete Lösung uP S der Differentialgleichung (6.3) mit A =
1, B = 15, rechter Seite f aus (6.5) sowie (links oben) ε = 0, 5, (rechts oben)
ε = 0.125 bzw. (links unten) ε = 0.05. Das Bild rechts unten zeigt die diskrete
Lösung des homogenisierten Problems (6.4).
hat. Im weiteren Verlauf beschränken wir uns auf den Fall mit A = 1 und
B = 15, siehe Abbildung 6.3. Wir betrachten nun das homogenisierte System
(6.4) mit rechter Seite
15π 2 2
3
(y − y ) + 48y − 16 sin(πx).
(6.5)
f (x, y) =
8
Damit ergibt sich für die exakte Lösung
u(x, y) = y 2 (1 − y) sin(πx).
Mithilfe der Park-Sheen Elemente wollen wir die Lösung des homogenisierten Problems approximieren. Dazu erzeugen wir diskrete Lösungen auf uniform verfeinerten Gittern und berechnen den a posteriori Fehlerschätzer aus
Kapitel 5.4.4. In diesem Fall sind die Oszillationen von f von höherer Ordnung, sodass sich der Fehlerschätzer nur aus ηT und ηE zusammensetzt. Dabei bezeichnet ηT den Fehler aus Kapitel 5.4.2, der bei der Konstruktion
der stetigen Approximation der diskreten Lösung auftritt, ηE beinhaltet die
Kantensprünge von Aeff ∇uP S in Normalenrichtung.
77
KAPITEL 6. NUMERISCHE BEISPIELE
approximierter Fehler
exakter Fehler
−1
Energiefehler
10
−2
10
−3
10
−4
10
2
3
10
10
Anzahl der Freiheitsgrade
4
10
5
10
Abbildung 6.4: Vergleich zwischen exaktem Fehler und dem Fehlerschätzer
bei der Lösung des homogenisierten Problems (6.4).
Interessant ist nun der Vergleich zwischen dem Fehlerschätzer und dem (bis
auf Quadraturfehler) exakten Fehler kAeff (∇u − ∇N C uP S )kL2 (Ω) . Dazu betrachten wir diese beiden Größen in Abhängigkeit der Freiheitsgrade auf einer logarithmischen Skala, siehe Abbildung 6.4. Darin gut zu erkennen ist die
Zuverlässigkeit des Fehlerschätzers, da der exakte Fehler stets überschätzt
wird. Man erkennt aber auch, dass der Fehlerschätzer nicht effizient ist, da
der exakte Fehler viel schneller gegen 0 konvergiert. Genauer erhalten wir
mit positiven Konstanten α und c eine Korrelation der Form
|||e||| = c |N (Ω)|−α
⇐⇒
log(|||e|||) = −α log(|N (Ω)|) + log(c),
wobei |||e||| den exakten bzw. geschätzten Fehler darstellt. Aus dem Experiment erhalten wir eine Konvergenzrate von α ≈ 1 mit c ≤ 1,5 für den exakten
Fehler. Der Fehlerschätzer dagegen erreicht nur eine Rate von α ≈ 0,5 mit
c ≤ 1,8.
6.4
Beispiel 3: Kanal mit Hindernis
In diesem Beispiel benutzen wir die in Kapitel 4 vorgestellte Basis der ParkSheen Elemente für mehrfach zusammenhängende Gebiete. Konkret betrachten wir das Beispiel eines quadratischen Hindernisses in einem Kanal wie in
Kapitel 3 in [GHT04]. Wir betrachten also das Poisson-Problem
−∆u = f
u = uD
in Ω = int([0, 2] × [0, 1]) \ [0,4, 0,6]2 ,
auf ∂Ω.
78
(6.6)
6.4. BEISPIEL 3: KANAL MIT HINDERNIS
Dabei wählen wir die rechte Seite f und die Dirichlet-Daten uD so, dass sich
u(x, y) = x(x − 1)(1 − y)y 2 sin(x + 2y)
als exakte Lösung ergibt.
Abbildung 6.5: Diskrete Lösung uP S der Differentialgleichung (6.6) mit
(oben) 180, (mitte) 776 und (unten) 3216 Freiheitsgraden.
Anstatt die a priori oder a posteriori Fehlerabschätzungen zu benutzen, folgen wir [GHT04] und messen den Fehler im Punkt (0,35, 0,5). Dabei ist zu
beachten, dass dieser Punkt nach der ersten uniformen Verfeinerung ein Knoten der Partition darstellt. Da wir nichtkonforme Elemente verwenden, gibt
es mehrere Funktionswerte an einem Knoten. Für den Vergleich mit dem
79
KAPITEL 6. NUMERISCHE BEISPIELE
exakten Funktionswert wählen wir daher das arithmetische Mittel all dieser
Werte. Das Ergebnis ist in Tabelle 6.2 zu sehen.
Anzahl Freiheitsgrade Fehler im Punkt (0,35, 0,5)
180
3,37 · 10−4
776
5,3 · 10−5
3216
3,3 · 10−5
Tabelle 6.2: Vergleich von diskreter und exakter Lösung im Punkt (0,35, 0,5).
6.5
Beispiel 4: Z-Shape
Im letzten Beispiel betrachten wir das Laplace-Problem auf einer Partition
aus Drei- und Vierecken, nutzen also die Verallgemeinerung der Park-Sheen
Elemente aus Kapitel 4. Das Gebiet Ω sei gegeben durch das Z-Shape,
Ω = {x ∈ (−1, 1)2 | 0 < arg x < 7π/4},
einem Quadrat mit ausgeschnittenem Dreieck, siehe Abbildung 6.6. Der Name kommt von der Form des dabei entstehenden Randes von Ω.
(0, 0)
Abbildung 6.6: Z-Shape Gebiet (links) und graduierte Partition (rechts).
Gegeben sei das Laplace-Problem auf Ω,
−∆u = 0
u = uD
in Ω
auf ∂Ω.
(6.7)
Die exakte Lösung und damit auch die Randwerte uD sind in Polarkoordinaten gegeben durch
u(r, ϕ) = r 4/7 sin(4ϕ/7).
80
6.5. BEISPIEL 4: Z-SHAPE
Demnach verschwindet uD auf den Außenkanten mit Endpunkt (0, 0). Der
Gradient von u hat die Form
4 −3/7 − sin(3ϕ/7)
∇u(r, ϕ) = r
.
cos(3ϕ/7)
7
Es gibt also eine Singularität an der Stelle 0. Zudem besitzt Ω eine nicht”
konvexe Ecke“, sodass keine optimale Konvergenzrate zu erwarten ist. Wie
im ersten Beispiel, werden wir auch in diesem Fall auf graduierte Netze
zurückgreifen. Abbildung 6.7 zeigt die diskreten Lösungen auf Partitionen
mit Parameter β = 1,7 bei unterschiedlichen Netzweiten.
1.5
1
0.5
0
−0.5
−1
0
1
−1
0
−0.5
0.5
1
1.5
1
0.5
0
−0.5
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
Abbildung 6.7: Diskrete Lösung uP S des Problems (6.7) mit β = 1,7.
Abbildung 6.8 zeigt die Fehler der diskreten Lösungen in der Energienorm
bei steigender Anzahl der Freiheitsgrade. Dabei wurden graduierte Netze zu
81
KAPITEL 6. NUMERISCHE BEISPIELE
verschiedenen Parametern β verwendet. Tatsächlich beobachten wir unterschiedliche Konvergenzraten: 0,28 bei uniformer Verfeinerung (β = 1), 0,39
bei graduierten Netzen mit Parameter β = 1,4 sowie 0,45 bei β = 1,7 und
0,48 bei β = 2.
graduiert β=1,4
graduiert β=1,7
graduiert β=2,0
uniform
−1
Energiefehler
10
−2
10
1
10
2
10
3
10
Anzahl der Freiheitsgrade
4
10
Abbildung 6.8: Vergleich des Fehlers in der Energienorm auf einem uniformen
(blau) und graduierten Netzen mit Parameter β = 1,4 (orange), β = 1,7
(grün) bzw. β = 2 (rot).
82
Zusammenfassung und Ausblick
Am Ende bleibt zu klären, was mit dieser Arbeit erreicht wurde und welche
Probleme offen geblieben sind bzw. in welchen Bereichen man weiter arbeiten
könnte.
Zusammenfassung
Ziel der Arbeit war die Verallgemeinerung der Park-Sheen Elemente, die
2003 für Partitionen in Vierecke einfach zusammenhängender Gebiete eingeführt wurden. Dabei handelt es sich um einen Finite-Elemente-Raum mit
stückweise affinen Funktionen auf Vierecken, die stetig in den Kantenmittelpunkten sind. Wie bei den Crouzeix-Raviart Elementen auf Dreiecken,
können wir Funktionen im Park-Sheen Raum durch die Werte an den Kantenmittelpunkten eindeutig beschreiben. Auf jedem Viereck muss dazu die
Diagonalregel erfüllt sein. Mit einer neuen Art von Basisfunktionen, den Kantenwegen, war es möglich eine Basis von P S(T ) für beliebige Partitionen in
Drei- und Vierecke anzugeben. Diese Erweiterung erlaubt auch, mit mehrfach zusammenhängenden Gebieten zu arbeiten.
In Anschluss betrachteten wir die Finite-Elemente-Methode mit Park-Sheen
Elementen für elliptische partielle Differentialgleichungen mit Dirichlet-Randbedingung. Für die a priori Abschätzung, die Konvergenz der Finite-ElementeMethode für uniforme Verfeinerung liefert, berechneten wir die auftretende
Konstante. Diese hängt neben den Schranken der Diffusionsmatrix A auch
von der Quasiuniformität der Partition, wie den Innen- und Diagonalwinkeln der Vierecke, ab. Terme höherer Ordnung enthalten zudem die oberen
Schranken von b und γ. Im Fall b 6= 0 mussten wir uns dabei auf hinreichend
feine Partitionen einschränken.
Es folgte die Herleitung eines zuverlässigen Fehlerschätzers. Dieser nutzte den
Residuen-basierten Ansatz, bei dem eine stetige Approximation der nichtkonformen Park-Sheen Lösung berechnet werden muss. Zusätzlich enthält
der Fehlerschätzer die Sprünge von A∇uP S in Normalenrichtung sowie den
Approximationsfehler der Dirichlet-Daten und Oszillationen.
83
Ausblick
Das zweite Beispiel in Kapitel 6 zeigt, dass der hergeleitete a posteriori Fehlerschätzer nicht effizient ist. Ein Ziel wäre daher, einen zuverlässigen und
(lokal) effizienten Fehlerschätzer zu finden. Darauf aufbauend könnte man
die Park-Sheen Elemente adaptiv verwenden und somit die Konvergenzraten
weiter verbessern. Dazu muss auch überlegt werden, wie Elemente gegebenenfalls verfeinert und hängende Knoten aufgelöst werden.
Eine weitere Anwendung könnte im Bereich der Elastizität liegen. So könnte
man die Locking-freien Kouhia-Stenberg Elemente ([KS95]), die CrouzeixRaviart Elemente mit den konformen P1 Elementen verbinden, auf beliebige
Partitionen in Drei- und Vierecke verallgemeinern. Dazu würden wir ParkSheen Elemente gepaart mit den konformen P1 Q1 Elementen verwenden und
müssten diese auf Locking untersuchen.
84
Literaturverzeichnis
[AF03]
Robert A. Adams and John J.F. Fournier. Sobolev Spaces. Elsevier, Amsterdam, second edition, 2003.
[AK08]
Grégoire Allaire and Sidi Mahmoud Kaber. Numerical Linear
Algebra, volume 55 of Texts in Applied Mathematics. Springer,
New York, first edition, 2008.
[Alt92]
Hans Wilhelm Alt. Lineare Funktionalanalysis. Springer, Heidelberg, second edition, 1992.
[BC04]
S. Brenner and C. Carstensen. Finite element methods. Ecyclopedia of Computational Mechanics, 2004.
[BF91]
Franco Brezzi and Michel Fortin. Mixed and Hybrid Finite Element Methods, volume 15 of Series in Computational Mathematics. Springer, New York, 1991.
[Bra02]
Andrea Braides. Γ-Convergence for Beginners, volume 22 of Oxford Lect. Series Math. Appl. Oxford University Press, 2002.
[Bra07]
Dietrich Braess. Finite Elements - Theory, Fast Solvers, and Applications in Solid Mechanics. Cambridge University Press, New
York, third edition, 2007.
[BS08]
Susanne C. Brenner and L. Ridgway Scott. The mathematical
theory of finite element methods, volume 15 of Texts in Applied
Mathematics. Springer, New York, third edition, 2008.
[Car97]
C. Carstensen. Weighted clement-type interpolation and a posteriori analysis for fem. Technical report Kiel, 97-19, 1997.
[Car05]
C. Carstensen. A unifying theory of a posteriori finite element
error control. Numer. Math., 100(4):617–637, 2005.
85
LITERATURVERZEICHNIS
[Car08]
C. Carstensen. Skript Numerische Mathematik, HumboldtUniversität zu Berlin. 2008.
[Car09]
C. Carstensen. Yonsei Lectures at the WCU Departement Computational Science and Engineering on Finite Element Method.
2009.
[CGK+ 10] C. Carstensen, J. Gedicke, L. Kern, J. Neumann, H. Rabus, and
M. Rozova. AFEM Dokumentation. 2010.
[CH07]
C. Carstensen and Jun Hu. A unifying theory of a posteriori error
control for nonconforming finite element methods. J. Numer.
Math., 107(3):473–502, 2007.
[Cia78]
Philippe G. Ciarlet. The Finite Element Method for elliptic problems. North-Holland, Amsterdam, 1978.
[CLT05]
C. Carstensen, R. Lazarov, and S. Tomov. Explicit and averaging
a posteriori error estimates for adaptive finite volume methods.
SIAM J. Numer. Anal., 42(6):2496–2521 (electronic), 2005.
[CM10]
C. Carstensen and C. Merdon. Computational survey on a posteriori error estimators for nonconforming finite element methods
part i: Poisson problems. not yet published, 2010.
[CR73]
M. Crouzeix and Raviart. Conforming and nonconforming finite element methods for solving the stationary stokes equations.
Math. Anal. Numer., 1973.
[Eva98]
Lawrence C. Evans. Partial Differential Equations, volume 19
of Graduate Studies in Mathematics. American Mathematical
Society, Providence, second edition, 1998.
[GHT04]
M. Grajewski, J. Hron, and S. Turek. Numerical analysis for a new
non–conforming linear finite element on quadrilaterals. Journal
of Computational and Applied Mathematics, 193(1):38–50, 2004.
doi: 10.1016/j.cam.2005.05.024.
[Gra03]
M. Grajewski. Numerische Analyse einer nichtkonformen linearen Finite-Elemente-Methode auf Vierecksgittern. Diplomarbeit,
Universität Dortmund, Mai 2003.
[KS95]
R. Kouhia and R. Stenberg. A linear nonconforming finite element method for nearly incompressible elasticity and stokes flow.
Comput. Methods Appl. Mech. Engrg, 124:195–212, 1995.
86
LITERATURVERZEICHNIS
[Mer09]
Christian Merdon. A posteriori Fehlerschätzer für elliptische partielle Differentialgleichungen. Diplomarbeit, Humboldt Universität zu Berlin, Mai 2009.
[Par03]
C. Park. A study on locking phenomena in finite element computations. PhD thesis, Seoul National University, 2003.
[PS03]
Chunjae Park and Dongwoo Sheen. P1 -nonconforming quadrilateral finite element methods for second-order elliptic problems.
SIAM J. Numer. Anal., 41(2):624–640 (electronic), 2003.
[PS08]
Grigorios A. Pavliotis and Andrew M. Stuart. Multiscale methods.
Averaging and homogenization, volume 53 of Texts in Applied
Mathematics. Springer, New York, 2008.
[PW60]
L. E. Payne and H. F. Weinberger. An optimal Poincaré inequality for convex domains. Arch. Rational Mech. Anal., 5:286–292
(1960), 1960.
87
Selbständigkeitserklärung
Ich erkläre, dass ich die vorliegende Arbeit selbstständig und nur unter Verwendung der angegebenen Quellen und Hilfsmittel angefertigt habe.
Berlin, den 14. Dezember 2010
Robert Altmann
Einverständniserklärung
Hiermit erkläre ich mich einverstanden, dass ein Exemplar meiner Diplomarbeit in der Bibliothek des Institutes für Mathematik verbleibt.
Berlin, den 14. Dezember 2010
Robert Altmann