Kapitel 15 - antriebstechnik.fh
Werbung

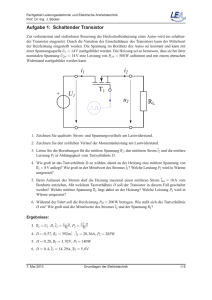
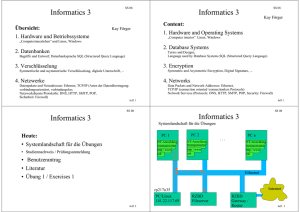
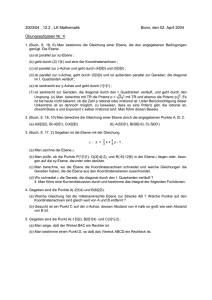
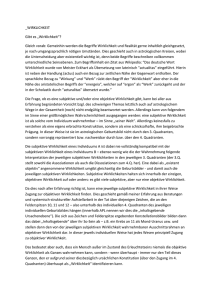
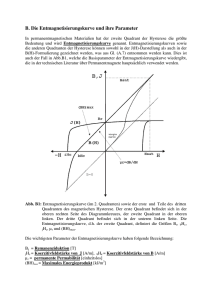
15 Gleichspannungswandler Übungsziele: • Arbeitsweise von Gleichstromstellern mit abschaltbaren Ventilen • Zweipunktregelung • Tief- und Hochsetzsteller • Arbeiten mit Gegenspannung im lückenden und nicht lückenden Betrieb • Steuerverfahren der Gleichstromsteller • Mehrquadrantenbetrieb Übungsdateien: MATHCAD: SIMPLORER: 15.1 gleichstel.mcd tiefsetz.ssh; quadrant1_gm..ssh; boostw.ssh; quadrant1u2_gmn.ssh; quadrant1u4a.ssh; quadrant1u4g.ssh; quadrant4_m.ssh;quadrant4_gm.ssh Allgemeines Gleichspannungswandler formen elektrische Gleichgrößen gegebener Spannung und Polarität in eine andere Gleichspannung um. Sie liegen bei den Simulationen an einer idealen Gleichspannungsquelle Ud . Sie ist zeitlich konstant und hat einen sehr kleinen Innenwiderstand. Die Ventile können hier nicht über den pe riodisch wiederkehrenden Stromnulldurchgang abgeschaltet werden. Früher sorgten spezielle Schaltkreise, z.B. die Tröger-Schaltung, für das sichere Ausschalten von Thyristoren. Abschaltbare Ventile verdrängen mit zunehmender Entwicklung zu höheren Schaltleistungen die ältere Technik. Die im Folgenden untersuchten Umrichter gehören zur Gruppe der selbstgeführten Stromrichter, bei denen die Taktfrequenz intern von Schwingquarzen erzeugt und nicht mehr von der Netzfrequenz vorgegeben wird. Allgemein gehören zu jedem Gleichspannungswandler mindestens ein steuerbarer Halbleiter und eine Diode. Die Grundformen bilden der Tiefsetzsteller oder Buck Wandler und der Hochsetzsteller oder Boost-Wandler als hart schaltende Versionen. Das bedeutet, dass sie verlustbehaftet ohne resonante Schaltentlastung arbeiten. In den resonanten Schaltverfahren werden zur Verringerung der Schaltverluste entweder die Spannung beim Einschalten oder der Strom beim Ausschalten auf Null gesetzt. Die resonante Schaltentlastung wird hier nicht behandelt. 15.2 Steuerung von Gleichspannungswandlern 225 Die Wandler werden z.B. für geregelte Netzgeräte, für die Energieumwandlung in der Fotovoltaik oder für die Versorgung von Gleichstromantrieben verwendet. In der elektrischen Antriebstechnik werden sie auch als Gleichstromsteller bezeichnet. 15.2 Steuerung von Gleichspannungswandlern In der Schaltung Bild 15.1 wird ein statisches GTO-Modell als abschaltbares Ventil verwendet. Mit der Datei tiefsetz.mcd können die Puls weiten- und die Pulsfolgesteuerung getestet werden. Mit der Datei tiefsetz_stromreg.ssh wird der Tie fsetzsteller durch eine Zweipunktstromsteuerung getastet. Bild 15.1: Tiefsetzsteller Der arithmetische Mittelwert der Ausgangsspannung oder Lastspannung UL ist vom Tastverhältnis a abhängig. Damit hat a bei den Gleichspannungswandlern die gleiche Funktion wie der bei der Anschnittsteuerung benutzte Steuerwinkel α. a= te te + ta = te T (15-1) Aus der Definition des Tastverhältnisses (15-1) ergeben sich grundsätzlich zwei unterschiedliche Steuerarten: 1. die Pulsweitensteuerung mit konstanter Periode (T = konst) und veränderlicher Einschaltdauer te, 2. die Pulsfolgesteuerung mit konstanter Einschaltdauer (te = konst) und veränderlicher Periode T. 15.2.1 Pulsweitensteuerung Die Pulsweitensteuerung (Bild 15.2) wird hauptsächlich in Anlagen angewendet, bei denen der Laststrom iL mit dem arithmetischen Mittelwert IL möglichst geglä ttet sein soll. Die Zeitkonstante τL = L1 /R1 wird so groß gewählt, dass der Strom bei 15 Gleichspannungswandler 226 Entlastung nicht lückt. Die Einschaltdauer te sowie die Ausschaltdauer ta werden verändert, während die Periodendauer T und damit die Schaltfrequenz konstant bleiben. Der arithmetische Mittelwert der Lastspannung folgt aus Gleichung (15-2): UL =Ud te = U d a mit 0 ≤ a ≤ 1 T (15-2) Die Einschaltdauer te kann nicht Null werden, da beim Ein- und Ausschalten realer Ventile eine endliche Umschaltzeit erforderlich ist. Mit der Mindesteinschaltzeit te min und der maximalen Einschaltzeit te max, die von der Ventilart und dem Laststrom abhängen, folgt der reale Stellbereich: U L max U L min = te max (15-3) te min Bild 15.2: Pulsweitensteuerung 15.2.2 Pulsfolgesteuerung Bei der Pulsfolgesteuerung oder Frequenzsteuerung (Bild 15.3) wird mit der konstanten Einschalt dauer te und veränderlicher Ausschaltdauer ta und folglich varia bler Periodendauer T bzw. variabler Frequenz f T gearbeitet. Die Pulsfolgesteuerung erfordert geringeren technischen Aufwand. Niedrige Arbeitsfrequenzen benötigen allerdings große Induktivitäten, um ein Lücken des Laststroms zu vermeiden. Mit T = te+ta folgt: fT = 1 1 = te + ta T (te = konst; T variabel : te ≤ T ≤ ∞ ) (15-4) Damit ergibt sich die Lastspannung zu U L = U d f T te (15-5) 15.2 Steuerung von Gleichspannungswandlern 227 Bild 15.3: Pulsfolgesteuerung 15.2.3 Zweipunktregelung Der Tiefsetzsteller wird bei Laststromregelungen eingesetzt. In der Datei tiefsetz_stromreg.ssh werden der Sollwert IL und die Schaltdifferenz ∆ i eingegeben. Der Sollwert muss kleiner als der Kurzschlussstrom IK max = Ud /R sein. Eine geforderte minimale Welligkeit wi min des Laststromes kann mit einer bestimmten Glättungsinduktivität L nur ab einem minimalen Abtastbereich a min < a eingehalten werden. Mit der Zeitkonstanten τ = L/R des Lastkreises berechnet sich die Schwankungsbreite des Laststroms zu: U 1− ∆i = d R −α T e τ − (1− a ) T −e 1− τ +e −T eτ −T τ (15-6) Die Schwankungsbreite ist die Differenz ∆i = Imax – Imin. Wird sie auf den Kurzschlussstrom bezogen, folgt Gleichung (15-7): ∆i 1 − e = IK −α T τ − (1− a )T −e 1− τ −T eτ +e −T τ (15-7) Nähert man den aus e-Funktionsabschnitten bestehenden schwankenden Strom durch eine Sinusfunktion an, ergibt sich die Geradenschar ∆i/IK = f(a) nach Gle ichung (15-8) bei der wi ihre Steigung bestimmt. ∆i ≈ 2 2 wi a IK (15-8) Die Zeitkonstante τ enthält die Glättungsinduktivität L. Damit sind die Glättung, der Aussteuerungsgrad, die Schwankungs breite sowie die Welligkeit voneinander abhängig. Die Funktionen ∆i/IK = f(a) mit T/τ aus Gleichung (15-7) und die Geradenschar sind in Bild 15.4. über dem Tastverhältnis a aufgetragen. Bei a = 0,5 ist die Glättung am ungünstigsten. 15 Gleichspannungswandler 228 τ τ Bild 15.4: Welligkeit der Zeipunktregelung Mit dieser Kurvenschar kann man z.B. aufgrund einer geforderten minimalen Welligkeit wi min und einer vorhandenen Glättung L das minimale Tastverhältnis ermitteln, bei dem die Welligkeit wi min noch erreicht wird oder man bestimmt die notwendige Glättung bei vorgegebenem minimalem Tastverhältnis. Je kleiner T/τ ist, desto besser ist die Glättung. Mit der MATHCAD-Datei gleichstl.mcd können die Verhältnisse für einen Betriebspunkt (Bild 15.7) mathematisch bestimmt werden. 1τ 1τ 2τ 3τ 4τ 5τ t Bild 15.5: Zweipunkt-Stromregelung 15.2 Steuerung von Gleichspannungswandlern 229 Bild 15.5 zeigt den Laststrom iL mit konstanter Schaltdifferenz ∆i bei unterschiedlicher Steuerung a und einem Sollwert, der dem Mittelwert des pulsierenden Stromes entspricht. Die zugehörigen Stellgrößen sind Rechteckblöcke der Lastspannung u L Durch Verkleinerung der Schwankung ∆i lässt sich zwar die Schaltdifferenz verkleinern, aber die Schalt häufigkeit steigt an. Das kann zur Verringerung der Lebensdauer mechanischer Schaltkontakte führen. Die Schaltung in Bild 15.1 wird mit den Eingabewerten ∆i = 60 A und Isoll = -300 A in der Datei tiefsetz_stromreg.ssh mit einer Zweipunktsteuerung simuliert. Die Last ist R = 0,8 Ω und L = 2 mH. Man beachte, dass sich sowohl te als auch T verändern; es bleiben weder die Pulsbreite noch die Pulsfrequenz konstant. Im Bild 15.6 folgt der Strom nach einer gewissen Einschwingzeit dem Sollwert. Wird der Strom bezüglich seiner Kennwerte in der Datenanalyse DAY ausgewertet, ergibt sich ohne den Einschwingvorgang eine Welligkeit wi = 6,51 %. Die Periode wird mit QuickView/ExternView mit Cursoreinstellung gemessen und ergibt T = 1 ms bei a = 0,5 mit τ = 2,5 ms. Damit folgt T/τ = 0,4. Bild 15.6: Stromregelung Diese Ergebnisse werden in die Datei gleichstel.mcd eingegeben. Damit folgt der Betriebspunkt in Bild 15.7 entsprechend dem Kennlinienfeld in Bild 15.4. Der Bereich, in dem die Betriebsbedingungen der Welligkeit und der Glättung erfüllt sind, wird durch beide Funktionen eingegrenzt. Bild 15.7: Betriebspunkt nach MATHCAD 15 Gleichspannungswandler 230 15.3 Gleichstromstellerschaltungen für den Ein- und Zweiquadranten-Betrieb Statt des Lastwiderstandes ist jetzt eine Gleichstrommaschine in den Aus gangskreis geschaltet (Bild 15.8). Der Spannungsabfall ∆U am Lastwiderstand wird durch die von der Maschinendrehzahl abhängige Quellenspannung Uq ersetzt. Da der Läuferwiderstand RA sehr klein ist, gibt es nur einen geringen Spannungsabfall, so dass der Widerstand oft vernachlässigt wird. Für Antriebe mit Gleichstrommaschinen wird ein Mehrquadranten-Betrieb gefordert. Die Drehzahl und das Drehmoment sollen unabhängig voneiander eingestellt werden können. Bei der netzgeführten Stromnrichtersteuerung wurde der Vierquadranten-Betrieb simuliert. Im Folgenden wird die Entwicklung vom Einquadranten-Antrieb über den Zweiquadranten-Antrieb bis zum Vierquadranten-Antrieb mit zwei verschiedenen Ansteuerungen vorgestellt. 15.3.1 Einquadranten-Betrieb Gleichstrommaschinen werden aus einem Gleichstromnetz konstanter Spannung Ud über pulsweitenmodulierte Gleichstromsteller mit einer kontinuierlich veränderlichen Gleic hspannung UL versorgt, die stets kleiner als die Versorgungsspannung ist. Man spricht deswegen von einem Tiefsetzsteller. Die Gleichstrommaschine kann nur motorisch arbeiten. Die Belastung in der Übungsdatei quadrant1_gm (Bild 15.9) besteht aus dem Ankerwiderstand RA , der Ankerinduktivität LA und der Gegen- oder Quellenspannung Uq ∼ Φ n. Bei nicht lückendem Ankerstrom berechnen sich die Mittelwerte aus den Momentanwerten u L und iL : U L = aU d > 0 IL = U L − Uq RA = aU d − U q RA >0 Bild 15.8: Einquadranten-Betrieb (15-9) 15.3 Gleichstromstellerschaltungen für den Ein- und Zweiquadranten-Betrieb 231 Aufgrund der Freilaufdiode FD gilt u L ≥ 0, da bei negativen Lastspannungen die Freilaufdiode leitend wird und die Maschine kurzschließt. Die Ventile V und FD verhindern eine Stromumkehr. Da immer IL ≥ 0 ist, wird auch das Maschinenmoment M M ≥ 0, das bedeutet Motorbetrieb. Während des Freila ufes entnimmt der Motor keine Energie aus dem Netz. Er ist theoretisch vom Netzt abgekuppelt und liefert die Energie aus der rotierenden Masse. τd Bild 15.9: Spannung und Strom in Abhängigkeit von der Steuerung Bild 15.9 zeigt die Pulsweitensteuerung bei abnehmendem Spannungsmittelwert UL für drei typische Lastfälle. Im Fall A, dem Normalbetrieb, schwankt der Laststrom zwischen einem Maximal- und einem Minimalwert, wie bei einer Zweipunktregelung. Während der Abschaltzeit ta fließt der Laststrom über die Freilaufdiode. Wegen des Kurzschlusses über der Diode ist dann die Lastspannung Null. Im Fall B erreicht der Strom beim weiteren Absenken des Spannungsmittelwertes schließlich die Lückgrenze. Er kann in der Schaltung Bild 15.8 nicht negativ werden. Im Fall C kommt es zum Lücken des Stromes. Wenn kein Strom fließt, liegt die Quellenspannung Uq am Ausgang. Im lückenden Betrieb wird die mittlere Lastspannung UL ≥ a Ud . Im Bild 15.9 ist die Maschinendrehzahl verein fachend konstant angenommen worden. Der Lückbetrieb wird auch bei Entlastung der Maschine bei unveränderter Spannung erreicht, was im folgenden Beispiel 1 simuliert wird. Beispiel 1 (SIMPLORER) Mit der SIMPLORER-Datei quadrant1.ssh ist ein Hochlauf gegen ein konstantes Widerstandsmoment simuliert. Der Hochlauf aus dem Stillstand erfordert eine hohe Stromaufnahme, den Anfahrstrom. Danach wird der Motor entlastet, um damit den Lückbetrieb zu demonstrieren. Das Moment wird über eine Sprungfunk- 232 15 Gleichspannungswandler tion simuliert, deren Nulllinie um -200 Einheiten gegenüber der Spanungsnulllinie verschoben wurde. Das Tastverhältnis a bleibt während des gesamten Vorgangs konstant. Die Maschinenparameter können über das Eigenschaftenmenü der fremderregten Gleichstrommaschine, siehe Bild 15.8, verändert werden. In Bild 15.10 sind die Momentanwerte der Maschinenspannung u L ; des Laststromes iL über der Zeit ausgegeben. Die Drehzahl n in U/min ist im Maßstab 1:10 verkleinert, um sie ebenfalls auf dem Bild zu zeigen. In allen Modellen ist darauf geachtet worden, dass die Zeitkonstante der Maschine möglichst klein ist, um die Schaltvorgänge des Stellers mit den Änderungen der Maschinendrehzahl besser vergleichen zu können. In der Praxis unterscheiden sich die Zeitkonstanten der Stromrichter von denen elektrischer Maschinen derartig, dass beide Zeitverhalten kaum zusammen in einem Diagramm gezeigt werden können. Die Versuchsmaschine läuft in etwa 150 ms hoch. Ihr Anfahrstrom klingt auf den Strom ab, der dem Widerstandsmoment entspricht. In diesem Zeitpunkt wird die Maschine entlastet und der Strom nimmt entsprechend ab. Die Drehzahl steigt auf die Leerlaufdrehzahl an. In diesem Bereich lückt der Laststrom. Im Lückbereich bilden sich an den Flanken der Spannungsblöcke Stufen, vergleiche mit Bild 15.9 C, deren Höhe der Quellenspannung entspricht. Proportional zur Drehzahl werden folglich auch die Stufen höher. Bild 15.10: Betriebsverhalten im ersten Quadranten 15.3.2 Zweiquadranten-Betrieb mit Stromumschaltung (Hochsetzsteller) Mit den wesentlichen Schaltelementen des Einquadranten-Stellers wird ein Hochsetzsteller gebaut. Die mittlere Lastspannung UL soll nun größer als Ud werden. Dadurch kann Leistung von einem Generator in die Gle ichspannungsquelle zurück gespeist werden. Der Laststrom kehrt sich um. Der Steller arbeitet im zweiten Quadranten. Eine Stromumkehr entspricht einem Momentenwechsel. 15.3 Gleichstromstellerschaltungen für den Ein- und Zweiquadranten-Betrieb 233 Bild 15.11: Hochsetzsteller Zunächst wird seine Funktion untersucht. Er erzeugt einen Spannungsmitte lwert UL , der größer als die Eingangsspannung Ud ist. Die Schaltung wird anhand Bild 15.11 erklärt. Wenn das Ventil V eingeschaltet wird, sperrt die Diode D. An der Spule L liegt die Spannung Ud und der Strom steigt entsprechend der Spuleninduktivität an. Die momentane Spannung an der Induktivität folgt dem Induktionsgesetz u ind = L di/dt. Sie ist eine Wechselspannung. Wenn das Ventil entsprechend dem eingestellten Tastverhältnis a abschaltet, fließt der abnehmende Strom iL über die Freilaufdiode D in den Lastkreis. Bild 15.12: Ideale Zeitverläufe am Hochsetzsteller In Bild 15.12 sind die Ventilspannung u Ventil, der Strom durch die Induktivität iInd sowie die Wechselspannung an der Induktivität u Ind gezeichnet. Es handelt sich um eine idealisierte Darstellung mit einem sehr großen kapazit iven Speicher. Beispiel 2 (SIMPLORER) Mit der Datei boostw.ssh wird die Schaltung nach Bild 15.11 unter realen Bedingungen untersucht. Mit der Eingangsspannung Ud = 500 V und den Werten R = 3 Ω; L = 5 mH; C = 3 mF wird das Modell in Bild 15.13 simuliert. Die Spannung und der Strom an 15 Gleichspannungswandler 234 der Induktivität sowie die Ventilspannung sind in Bild 15.14 bei a = 0,25 ausgegeben. Die jeweiligen Zeitachsen sind vertikal verschoben. Um die realen Verhältnisse in Bild 15.14 mit den idealen Werten von Bild 15.12 zu vergleichen, wurden gleiche Periodenzahlen gewählt. Während das Ventil eingeschaltet ist, fällt an ihm sehr geringe Spannung ab. Der Strom steigt linear nach dem Induktionsgesetz an. Öffnet das Ventil, fällt dort die Eingangsspannung von 500 V ab zuzüglich des Spannungsabfalls über der Induktivität, welcher durch den Entladestrom verursacht wird. Der Strom kommutiert auf die Diode. Bei erneutem Einschalten wiederholt sich dieser Vorgang. Bild 15.13: Hochsetzsteller Bild 15.14: Spannung und Strom des Hochsetzstellers nach Bild 15.13 Das Übersetzungsverhältnis ü hängt vom Tastverhältnis a ab und berechnet sich nach Gleichung (15.10): UL =ü=a Ud beim Tiefsetzsteller UL 1 =ü= Ud 1− a beim Hochsetzsteller (15-10) 15.3 Gleichstromstellerschaltungen für den Ein- und Zweiquadranten-Betrieb 235 Bild 15.15: Übersetzungssverhältnis ü = f(a) Die bezogenen Spannungen sind aus den beiden Grafiken (Bild 15.15) unmittelbar zu entnehmen. Für unser Beispiel a = 0,25 ergibt sich ein Übersetzungs verhältnis von ü = 1,33. Zur graphischen Überprüfung der Simulationsergebnisse wurden in Bild 15.16 die Eingangsgleichspannung Ud und die Spannung am Lastwiderstand UL ausgegeben. Die Schätzung des arithmetischen Mittelwertes UL aus dem Momentanwert u L ergibt recht genau den erwarteten Wert von UL = 665 V. Bild 15.16: Eingangs - und Ausgangsspannung des Boostwandlers 15.3.3 Zweiquadranten-Betrie b mit Stromumkehr In Bild 15.17 wurden die Stromwege eingezeichnet, die in der jeweiligen Betriebsart aktiv sind. Um den generatorischen Betrieb bei Stromumkehr zu ermöglichen, muss ein Gleichstromsteller als Hochsetzsteller eingesetzt werden. Tiefsetzsteller und Hochsetzsteller besitzen gleiche Bauelemente. Es reicht aus, die Elemente bei jedem Stromnulldurchgang umzuschalten, um vom ersten in den vierten Quadranten zu wechseln. Allerdings muss man bei der mechanischen Umschaltung eine längere stromlose Pause einhalten, um die Trägheit mechanischer Schalter zu berücksichtigen. Dadurch wird die Dynamik der Regelung herabgesetzt. 15 Gleichspannungswandler 236 (A) Motorbetrieb im 1. Quadranten (Tiefsetzsteller) (B) Generatorbetrieb im 2. Quadranten Bild 15.17: Stellerbetrieb im ersten und zweiten Quadranten Beispiel 3 (SIMLORER) In der Datei quadrant1u2_gmn.ssh wird die mechanische Umschaltung simuliert. Die Schalterstellung in Bild 15.18 entspricht dem Betrieb im ersten Quadranten. Durch eine sprunghafte Änderung des Drehmomentes wird die Stromumkehr erzwungen. Der zeitliche Drehmomentenverlauf wird als Sollwert mit dem Sprungmakro vorgegeben. Zu diesem Zweck wird das Widerstandsmoment über den Namen MW des Makros mit der fremderregten Gleichstrommaschine verbunden. Bei 100 ms soll sich das Moment umkehren. Das Simulationsergebnis in Bild 15.19 zeigt, dass sich die Gleichstrommaschine schon beim Einschalten dreht. Dadurch wird der Anlaufstrom verkleinert. Die Drehzahl ist im Maßstab 1/10 im Oszillogramm aufgezeichnet. Der pulsierende Ankerstrom folgt der gepulsten Ankerspannung. Durch die Momentenumkehr arbeitet die Maschine generatorisch im zweiten Quadranten und die Drehzahl steigt. Entsprechend der mechanischen Zeitkonstante eilt der Strom dem Momentenverlauf nach. Das Trägheitsmoment und die Erregung der Maschine können für weitere Experimente über das Eigenschaftenmenü der Maschinenkennlinien verändert werden. 15.3 Gleichstromstellerschaltungen für den Ein- und Zweiquadranten-Betrieb 237 Bild 15.18: Umschaltung für den Betrieb im ersten und zweiten Quadranten Im Falle der Stromumkehr ist aus Bild 15.17 zu entnehmen, dass bei eingeschaltetem Ventil die Klemmenspannung der Maschine Null ist. Der Ankerstrom nimmt ab. Bei ausgeschaltetem Ventil liegt die volle Gleic hspannung an der Maschine und der Laststrom nimmt zu. Die Diode wird jetzt leitend und speist in ihrer Funktion als Rückspeisediode RD Energie ins Netz. Die Schaltung arbeitet als Hochsetzsteller. Die Arbeitsweise der Diode hat sich grundsätzlich gegenüber dem Betrieb im ersten Quadranten geändert. Beim Tiefsetzsteller arbeitete sie als Freilaufdiode FD, die die Energiezufuhr aus dem Netz unterbricht und den Laststrom aus dem mechanischen und dem induktiven Speicher übernimmt. Bild 15.19: Betrieb im ersten und zweiten Quadranten Der Zweiquadranten-Antrieb bei Ankerstromumkehr ohne mechanische Umschaltung wird durch die Schaltung nach Bild 15.20 bei gegenphasiger Taktung zweier Ventile realisiert. Sie kann mit der Datei quadrant1u2gmn.ssh simuliert werden. Das Steuerverfahren: GTO1 und GTO2 werden gegenphasig geschaltet, d.h., während der Zeit te ist GTO1 ein- und GTO2 ausgeschaltet, während ta ist GTO2 eingeschaltet und GTO1 ausgeschaltet. 15 Gleichspannungswandler 238 Bild 15.20: Zweiquadranten-Betrieb 15.3.4 Zweiquadranten-Betrieb mit Spannungsumkehr Das Bild 15.21 zeigt in A die Strombahnen für den Zweiquadranten-Betrieb mit Spannungsumkehr und in B den Vierquadranten-Betrieb. (A) Motor- und Generatorbetrieb im 1. und 4. Quadranten (B) Motor- und Generatorbetrieb im allen 4 Quadranten Bild 15.21: Spannungsumschaltung und Vierquadranten-Betrieb Gleichzeitige Taktung Bei der gleichzeitigen Taktung werden die Ventile GTO1 und GTO2 in der Simula tionsschaltung (Bild 15.22) gleichzeitig ein- und ausgeschaltet. Der Vorgang ist in der Datei quadrant1u4g.ssh realisiert. Zum Vergleich wird die alternierende Taktung in der Datei quadrant1u4a.ssh untersucht. 15.3 Gleichstromstellerschaltungen für den Ein- und Zweiquadranten-Betrieb 239 Bei der gleichzeitigen Taktung werden die Ventile mit gleichen Steuerimpulsen durchgeschaltet. Im eingeschalteten Zustand liegt die Spannung Ud an der Maschine. Der Gleichstrom steigt mit der Zeitkonstanten τL = RA /LA an. Werden die Ventile abgeschaltet, wechselt der Laststrom auf die Dioden D1 uund D2. Die Spannung kehrt das Vorzeichen um und ist jetzt -Ud . Bild 15.22: Betrieb im ersten und vierten Quadranten Während der Stromführungszeit der Dioden wird Leistung aus dem Lastkreis in die Spannungsquelle zurückgespeist. Sie arbeiten als Rückspeisedioden. Mit erneutem Einschalten der Ventile wiederholt sich der Vorgang. Ebenso wie beim Einquadranten-Gleichstromsteller lückt der Strom bei Entlastung. Es enstehen wieder Absätze in den Flanken der Spannungsblöcke. Das Übersetzungsverhältnis ü bei gleichzeitiger Taktung beträgt: ü= U L Pd = = 2a − 1 Ud S (15-11) Alternierende Taktung Bei der alternierenden Taktung nach der Schaltung im Bild 15.22 ist bei nicht lückendem Strom und u L > 0 immer GTO2 stromführend, während GTO1 innerhalb einer Periodendauer T nur für die Dauer te eingeschaltet ist. Wenn beide elektronischen Schalter le itend sind, liegt an der Maschine die Spannung Ud . Wird GTO1 abgeschaltet, fließt in dem aus GTO2 und D2 gebildeten Freilaufkreis der Laststrom iL weiter und die Lastspannung u L wird Null. Wird der GTO1 wieder eingeschaltet, ist erneut u L = Ud. Wenn GTO2 ausgeschaltet wird, kommutiert der Laststrom iL auf den Freilaufkreis, der jetzt aus den Schaltelementen GTO1 und D1 gebildet wird. Die Lastspannung u L ist durch den Freilaufkreis wieder kurzgeschlos sen und wird folglich Null. Das Übersetzungsverhältnis ü bei alternierender Taktung ist im nicht lückenden Betrieb genauso groß wie beim Einquadranten-Steller: 15 Gleichspannungswandler 240 ü= UL P = d =a Ud S (15-12) Beispiel 5 Entsprechend der beiden Steuerkennlinien in Bild 15.23 wird für beide Taktungen die Lastspannung auf den gleichen Mittelwert UL = -0,5 Ud im vierten Quadranten auf halbe negative Spannungs mittelwerte gesteuert. Aus Bild 15.23 folgt für die alternierende Taktung das Tastverhältnis a = -0,5 und für die gleichzeitige Taktung a = 0,25. Die Ergebnisse sind in den Diagrammen Bild 15.24 und Bild 15.25 zu sehen. 1 -1 1 a -1 Bild 15.23: Vergleich der Übersetzung Der Strom ist in beiden Diagrammen positiv und die Drehzahl bleibt fast konstant und liegt bei -4200 U/min im Maßstab 1/10. Da der Vergleich für die selben Mittelwerte der Spannung erfolgte, ergibt sich auch die gleiche Drehzahl. Der Laststrom stellt sich entsprechend dem Moment der Gleichstrommaschine ein. Bild 15.24: Strom und Spannung und Drehzahl bei alternierender Taktung (a = -0,5 ) 15.3 Gleichstromstellerschaltungen für den Ein- und Zweiquadranten-Betrieb 241 Bild 15.25: Strom, Spannung und Drehzahl bei gleichzeitiger Taktung (a = 0,25) Bild 15.26: Pulse der gleichzeitigen Taktung Obwohl die Spannungsmittelwerte gleich sind, unterscheiden sich die Momentanwerte von Laststrom und Spannung erheblich. Die charakteristischen Werte der alternierenden Taktung entsprechen denen des Einquadranten-Stellers. Die Harmonischen der getakteten blockförmigen Lastspannung u Lν für ν = 1;2;3... sind bei gleichzeitiger Taktung nach Gleichung (15-13) doppelt so groß wie bei alternierender Taktung. Die Welligkeiten verhalten sich ebenso. gleichzeitige Taktung alternierende Taktung U νL 2 =2 sin (aνð ) Ud νð U νL 2 = sin (aνð ) Ud ν ð wu = a − a2 a − 0,5 wu = 1 −1 a (15-13) 15 Gleichspannungswandler 242 Deswegen ist die alternierende Taktung gegenüber der gleic hzeitigen Taktung vorzuziehen. Auch die folgende Leistungsbilanz ergibt, dass die alternierende Taktung der gleichzeitigen Taktung überlegen ist. Die Bilder 15.26 und 15.27 zeigen die Pulse für beide Taktungen. Bild 15.27: Pulse der alternierenden Taktung Unter der ideellen Voraussetzung, dass der Eingangs strom id ein ideal geglätteter Gleichstrom ist, kann die Leistungsbilanz mathematisch formuliert werden. Wenn die Scheinleistung am Eingang S = Ud IL ist, folgen mit S 2 = Q2 +Pd 2 die Gleichungen (15-14), die in Bild 15.28 ausgewertet wurden. Die Berechnung kann als Orientierung für die Leistungsbilanz im Datenanalyseprogramms DAY dienen. Da der Strom der Analyse den realen Bedin gungen entspricht und nicht rechteckförmig ist, sondern sich aus e-Funktionsabschnitten zusammensetzt, sind Abweichungen zu den Simulationsergebnissen zu erwarten. Bild 15.28: Leistungen über dem Tastverhältnis a gleichzeitige Taktung alternierende Taktung Pd = (2a − 1) Ud I L Pd =a Ud I L Q = 2 a− a2 Ud I L Q = a −a2 UdI L (15-14) 15.4 Vierquadranten-Betrieb 15.4 243 Vierquadranten-Betrieb Die vier Betriebsarten zeigt Bild 15.29. Der Vierquadranten-Gleichstromsteller (Bild 15.30) folgt aus der Antiparalle lschaltung zweier Zweiquadranten-Gleichstromsteller. Es werden jetzt vier abschaltbare Ventile und vier Dioden eingesetzt. Diese Schaltung ist auch mit den oben genannten Verfahren der gleichzeitigen oder der alternierenden Taktung steuerbar. Die Dateien quadrant1_4.ssh und quadrant1_4_m.ssh enthalten den Vierquadrantensteller als Netzwerk und als Makroversion. UL ~ n Generatorbetrieb Rechtslauf Motorbetrieb Rechtslauf IL ~ MW Gene- Motorbetrieb Linkslauf Generatorbetrieb Linkslauf Bild 15.29: Betriebsarten Das Netzwerk Bild 15.30 besteht aus zwei antiparallel geschalteten Wechselstrombrücken. Die abschaltbaren Ventile GTO1 bis GTO4 bilden die eine Brücke und die Dioden D1 bis D4 die andere. Um einen Kurzschluss der Gleichspannungsquelle zu vermeiden, dürfen die zu einem Brückenzweigpaar gehörenden Schalter nie gleichzeitig leitend sein. Deswegen werden nur GTO1 und GTO2 gezündet, wenn positiver Laststrom fließt, und GTO3 und GTO4 bei negativem Strom. Bei der Aussteuerung des Vierquadranten-Gleichstromstellers auf den Gleichspannungsmittelwert UL = 0 ist u L eine Wechselspannung. Der Vierquadranten-Gleichstromsteller hat die gleiche Struktur wie der einphasige, selbstgeführte Stromrichter. Er arbeitet je nach Energiefluss als Gleich- oder als Wechselrichter. Bild 15.30: Gleichstromsteller für Vierquadranten-Betrieb 15 Gleichspannungswandler 244 Beispiel 6 (SIMPLORER) Zum Betrieb in den vier Quadranten wird im Beispiel 6 ein Rechteckgenerator eingesetzt. Es wird mit dem Tastverhältnis a von 20 % mit den Amplituden 0,2 und -0,2 und einer Frequenz von 6,66 Hz bei alternierender Taktung umgeschaltet. Die Stromumschaltung erfolgt separat durch einen Momentensprung bei t = 300 ms. In Bild 15.31 sind die Oszillogramme von Strom und Spannung der Gleichstrommaschine in allen vier Quadranten zu sehen. Der Betrieb beginnt im ersten Quadranten bei positiven Strom- und Spannungswerten. Anschließend wird die Spannung umgeschaltet und die Schaltung arbeitet im vierten Quadranten bei positivem Strom und negativer Spannung. Das entspricht einer Drehzahlumkehr der Maschine. Bei 0,3 s wird das Moment umgeschaltet. Die Spannung ist positiv bei negativem Strom. Wir sind im zweiten Quadranten beim generatorischen Bremsbetrieb. Im dritten Quadranten ab 0,45 s arbeitet die Maschine wieder als Motor mit entgegengesetzter Drehrichtung zum ersten Quadranten. Entsprechend der mechanischen Zeitkonstanten folgt die Drehzahl der Spannungsumschaltung nur langsam. Bild 15.31: Vierquadranten-Betrieb