Kap. 15: S. 965 ff
Werbung

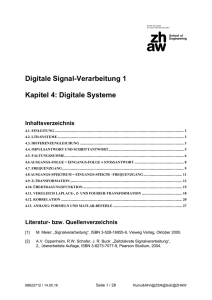
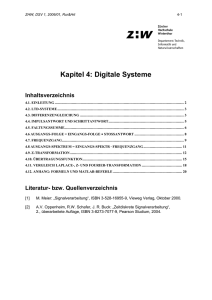
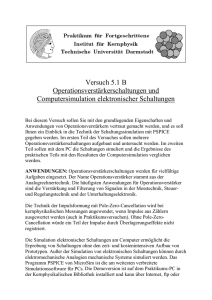
15.5 Beschreibung von linearen Systemen 965 15.5 Beschreibung von linearen Systemen Um das Übertragungsverhalten von Systemen zu bestimmen, untersucht man in der Regelungs- und Systemtechnik den Zusammenhang zwischen dem Eingangssignal f (t) und dem zugehörigen Ausgangssignal g (t). Abb. 15.21. Im Folgenden werden wir die für die Anwendungen wichtigen linearen Systeme charakterisieren. Es zeigt sich, dass ein lineares System durch die Impulsantwort (Reaktion des Systems auf die Impulsanregung) vollständig beschrieben wird: Durch die Kenntnis der Impulsantwort ist man in der Lage, die Reaktion des Systems auf ein beliebiges Eingangssignal f (t) zu berechnen. In vielen Fällen lässt sich aber besser die Fourier-Transformierte der Impulsantwort (= Systemfunktion) bestimmen. Ziel dieses Kapitels ist, den Zusammenhang zwischen Systemfunktion und Impulsantwort und deren Bedeutung aufzuzeigen. 15.5.1 LZK-Systeme Ein Analogsystem L ist eine Vorschrift, die jedem Eingangssignal f (t) ein Ausgangssignal g (t) zuweist. Ein Analogsystem ist also eine Transformation L, die jeder Eingangsfunktion f (Input) eine Ausgangsfunktion g (Output) zuordnet: g (t) = L [f (t)]. Da wir nur Analogsysteme betrachten, bezeichnen wir L im Folgenden immer nur durch den Begriff System. Ein System L heißt linear, wenn das Superpositionsprinzip gültig ist: (L) L [k1 f1 (t) + k2 f2 (t)] = k1 L [f1 (t)] + k2 L [f2 (t)] für beliebige Eingangsfunktionen f1 (t) , f2 (t) und Konstanten k1 , k2 ∈ IR. Das Superpositionsgesetz besagt, dass die Antwort eines linearen Systems auf eine Überlagerung von Eingangsfunktionen dieselbe Überlagerung der Antwortfunktionen zur Folge hat. Wichtige Spezialfälle von linearen Systemen stellen solche Systeme dar, die sich durch lineare Differenzialgleichungen beschreiben lassen. Dabei setzen wir im Folgenden voraus, dass die Anfangsbedingungen verschwinden, d.h. für t < 0 ist keine Energie in dem System enthalten. 15.5 966 15. Fourier-Transformation Ein System L heißt zeitinvariant, wenn die Form der Reaktion des Systems unabhängig davon ist, wann das Eingangssignal eintrifft: (Z) g (t) = L [f (t)] ⇒ g (t − t0 ) = L [f (t − t0 )]. Z.B. sind alle Netzwerke, die aus zeitlich konstanten Bauelementen (L, R, C) aufgebaut sind, zeitinvariante Systeme. Netzwerke mit zeitlich variablen Größen von (L, R, C) sind zeitvariante Systeme. Ein System heißt kausal, wenn die Reaktion des Systems g (t) erst dann einsetzt, wenn die Ursache f (t) wirksam ist: (K) f (t) = 0 für t < t0 ⇒ g (t) = L [f (t)] = 0 für t < t0 . Bei nichtkausalen Systemen kann die Reaktion schon einsetzen, wenn die Ursache noch nicht vorliegt (→ idealer Tiefpass). Man beachte, dass nur kausale Systeme physikalisch sinnvoll sind. Im Folgenden beschränken wir uns auf die Beschreibung von linearen, zeitinvarianten, kausalen Systemen (LZK-Systemen). Dabei ist die Linearitätsvoraussetzung die schärfste Einschränkung. Beispiel CD.72. Die Differenzialgleichung g 0 (t) + α g (t) = f (t) mit g (0) = 0 ist stellvertretend z.B. für die Beschreibung eines RC-Kreises. Dieses System stellt ein LZK-System dar. f (t) ist die Ursache, g (t) ist die Systemreaktion auf f (t). Für diesen RC-Kreis geben wir für das Eingangssignal δε (t) das zugehörige Ausgangssignal hε (t) an: Abb. 15.22. Eingangs- und Ausgangssignal eines RC-Kreises 15.5 Beschreibung von linearen Systemen 967 Im Bereich 0 ≤ t ≤ ε wächst die Spannung am Kondensator gemäß 1 1 − e−α t αε an (Einschaltvorgang) und im Bereich t > ε klingt die Spannung wie 1 (eα ε − 1) e−α t αε ab (Ausschaltvorgang), was man durch Einsetzen in die Differenzialgleichung bestätigt. Damit ist die Systemantwort auf δε (t) = 1ε (S (t) − S (t − ε)) gegeben durch 1 −α t ) 0≤t≤ε α ε (1 − e hε (t) = 1 (eα ε − 1) e−α t t ≥ ε. αε Wir betrachten nun den Fall ε → 0, d.h. die Anregung des Systems erfolgt durch den δ-Impuls δ (t) =lim δε (t) . Da wir an dem Zeitverhalten der Funkε→0 tion für t > 0 interessiert sind, nehmen wir die Funktionsvorschrift von hε (t) für t ≥ ε und bestimmen hiervon den Grenzwert ε → 0. Für t > 0 gilt mit der Regel von l’Hospital h (t) = lim hε (t) = lim ε→0 ε→0 eα ε − 1 −α t 00 α eα ε −α t e = lim e = e−α t ε→0 αε α ⇒ h (t) = e−α t S (t). h (t) heißt Impulsantwort, da sie die Reaktion des Systems auf die Impulsfunktion δ (t) darstellt. 15.5.2 Impulsantwort Die Vorgehensweise, die wir im obigen Beispiel gewählt haben, führen wir für beliebige lineare Systeme durch: Sei L ein LZK-System und δε (t) die Familie von Rechtecktfunktionen. Für jedes δε (t) berechnet man das Antwortsignal hε (t) = L [δε (t)]. Da δε (t) → δ (t) für ε → 0 und L ein lineares System, folgt h i h (t) =lim hε (t) =lim L [δε (t)] = L lim δε (t) = L [δ (t)] . ε→0 ε→0 ε→0 h (t) ist die Antwort des Systems auf die Impulsfunktion (= Deltafunktion) δ (t) und heißt die Impulsantwort. Die Bedeutung der Impulsantwort wird durch den folgenden Satz hervorgehoben, der besagt, dass man die Systemreaktion g (t) auf ein beliebiges Ein- 968 15. Fourier-Transformation gangssignal f (t) berechnen kann, wenn die Impulsantwort des Systems bekannt ist: Faltungssatz: Sei L ein lineares, kausales, zeitinvariantes System. h (t) sei die Impulsantwort und f (t) ein beliebiges Eingangssignal. Dann ist die Antwort des Systems g (t) = L [f (t)] gegeben durch Z ∞ g (t) = (f ∗ h) (t) = f (τ ) h (t − τ ) dτ . −∞ Die Systemreaktion g (t) = L [f (t)] auf ein beliebiges Eingangssignal f berechnet sich durch das Faltungsintegral der Impulsantwort h mit dem Eingangssignal f . Diesen zentralen Satz der Systemtheorie begründen wir: DurchR die Ausblendeigenschaft der δ-Funk∞ tion, −∞ f (τ ) δ (t − τ ) dτ = f (t), und der Definition der δ-Funktion als Grenzwert der Funktionenfamilie δε (t), δ (t) = lim δε (t), gilt ε→0 Z Abb. 15.23. ∞ f (τ ) δ (t − τ ) dτ Z ∞ = lim f (τ ) δε (t − τ ) dτ . f (t) = −∞ ε→0 −∞ Nach der algebraischen Definition des Integrals ersetzen wir das Integral durch eine Summe über Rechtecke ∆τj · f (τj ) δε (t − τj ): f (t) =lim lim ε→0 N →∞ N X f (τj ) δε (t − τj ) ∆τj . j=0 Die Antwort des Systems auf das Eingangssignal f (t) ist dann gegeben durch N X g (t) = L [f (t)] = L lim lim f (τj ) δε (t − τj ) ∆τj ε→0 N →∞ j=0 N X = lim lim L f (τj ) δε (t − τj ) ∆τj . ε→0 N →∞ j=0 Da L ein lineares System ist, darf man das Superpositionsgesetz anwenden: Die Reaktion des Systems auf eine Summe von Eingangssignalen ist gegeben 15.5 Beschreibung von linearen Systemen 969 durch die Summe der Antwortfunktionen g (t) =lim lim ε→0 N →∞ N X f (τj ) L [δε (t − τj )] ∆τj . j=0 Aufgrund der Zeitinvarianz, L [δε (t − τj )] = hε (t − τj ), gilt weiter N X g (t) = lim lim ε→0 N →∞ = lim N →∞ N X f (τj ) hε (t − τj ) ∆τj j=0 Z ∞ f (τj ) h (t − τj ) ∆τj = f (τ ) h (t − τ ) dτ. −∞ j=0 Beispiel CD.73 (Berechnung der Impulsantwort). Gesucht ist die Impulsantwort für das lineare System, welches durch die folgende Differenzialgleichung beschrieben wird: g 0 (t) + α g (t) = f (t) : Die Impulsantwort h (t) ist die Reaktion des Systems auf das Eingangssignal f (t) = δ (t): h0 (t) + α h (t) = δ (t). Wir wenden auf diese Differenzialgleichung die Fourier-Transformation an und verwenden die Ableitungsregel (F7 ): F (h0 (t)) = i ω F (h (t)) : F (h0 (t)) + α F (h (t)) = F (δ (t)) i ω F (h (t)) + α F (h (t)) = 1 ⇒ F (h (t)) (ω) = Die zu 1 α+i ω 1 . α + iω gehörende Zeitfunktion ist nach Beispiel 15.2 h (t) = e−α t S (t). 970 15. Fourier-Transformation Anwendungsbeispiel CD.74 (Lösen von Differenzialgleichungen mit der Fourier-Transformation). Ein Stromkreis siehe Abb. 15.24 ist gegeben durch eine Induktivität L und einen Ohmschen Widerstand R. Zur Zeit t = 0 wird der Stromkreis durch Anlegen einer äußeren Spannungsquelle geschlossen. Gesucht ist der Strom I (t) als Funktion der Zeit für die Spannungsverläufe Abb. 15.24. RL-Kreis ① U (t) = U0 S (t) , ② U (t) = U0 sin (ω t) S (t). Nach dem Maschensatz gilt für eine beliebige Eingangsspannung L I˙ (t) + R I (t) = U (t) R 1 I˙ (t) + I (t) = U (t). L L ,→ Wir bestimmen die Fourier-Transformierte der Impulsantwort gemäß dem Vor gehen in Beispiel 15.73 α = R , indem wir als spezielles Eingangssignal δ(t) L wählen. Damit folgt 0 R h (t) + h (t) = δ (t) L R h (t) = e− L t S (t). ⇒ Um den Stromverlauf für die Spannungen ① und ② zu berechnen, genügt es nach der Kenntnis der Impulsantwort, die gegebene Eingangsspannung U (t) mit dieser Impulsantwort h(t) zu falten. ① Für den Spannungsverlauf U (t) = U0 S (t) ist die rechte Seite der Differenzialgleichung f (t) = L1 U (t) = UL0 S (t). Durch Faltung von f mit der Impulsantwort h bestimmt sich die Systemreaktion auf f : Z ∞ I (t) = (f ∗ h) (t) = f (τ ) h (t − τ ) dτ −∞ Z ∞ = −∞ U0 L R S (τ ) e− L (t−τ ) S (t − τ ) dτ . 15.5 Beschreibung von linearen Systemen 971 Zum besseren Verständnis dieser Formel diskutieren wir zunächst die Funktion h (t − τ ). Dabei ist t ein Parameter und τ die Variable! Wir gehen wieder R von der Funktion h (τ ) = e− L τ S (τ ) in (a) zu der gespiegelten (=gefalteten) Funktion h (−τ ) über (b). h (t − τ ) erhalten wir anschließend, indem wir den Graphen von h (−τ ) um t nach rechts verschieben (c). Das Produkt von h (t − τ ) mit UL0 S (τ ) ist in (d) gezeichnet. Die hervorgehobene Fläche entspricht dem Wert des Faltungsintegrals zum Zeitpunkt t. Abb. 15.25. Berechnung des Ausgangssignals über die Faltung der Impulsantwort h(t) mit dem Eingangssignal f (t) Durch die graphische Argumentation aus Abb. 15.25 kommen wir zu dem Ergebnis Z ∞ U0 −R L (t−τ ) S (t − τ ) dτ I (t) = L S (τ ) e −∞ = = U0 L U0 L Z t R e− L (t−τ ) dτ = 0 R e− L t h L R R eL τ it welches in Abb. 15.25 (e) dargestellt ist. 0 = R U0 L e− L t U0 R Z t R e L τ dτ 0 R 1 − e− L t , 972 15. Fourier-Transformation Bemerkung: Für t < 0 ist S (t − τ ) · S (τ ) = 0 für alle τ ∈ IR, so dass das Faltungsintegral den Wert 0 besitzt. Somit müsste man bei der Berechnung präziser R I (t) = UR0 1 − e− L t S (t) schreiben. ② Berechnung der Systemreaktion auf die zweite Spannung mit Maple. Durch Faltung der Impulsantwort mit dem Eingangssignal f (t) = U0 sin (ω t) S (t) L bestimmt man die Systemreaktion auf f (t). Zur Berechnung des Faltungsintegrals verwenden wir nun Maple. Wir setzen mit dem alias-Befehl abkürzend S = Heaviside und definieren die Eingangsfunktion U (t) sowie die Impulsantwort h (t) > alias(S = Heaviside): > U := t -> U0/L ∗ sin(w ∗ t) ∗ S(t): > h := t -> exp(-R/L ∗ t) ∗ S(t): Das Faltungsintegral ist dann > i(t) := int(U(tau) ∗ h(t-tau), tau = -infinity..infinity); Rt i(t) := ⇒ I (t) = Setzt man I0 = (−w L cos (w t) + R sin (w t)) U 0 e− L w L U 0 + 2 R2 + w2 L2 R + w2 L2 U0 2 R + ω 2 L2 √ U0 R2 +ω 2 L2 −R t L ωLe und tan ϕ = − ω L cos (ω t) + R sin (ω t) . ωL R , I (t) = I0 sin (ω t + ϕ) + so gilt ωL −R L t e . R2 + ω 2 L2 Die Lösung zerfällt somit in einen asymptotischen Zustand I0 sin (ω t + ϕ) , R und in einen zeitlich exponentiell abklingenden Anteil ∼ e− L t . I0 erweist sich als Stromamplitude, √ welche das Verhältnis von Spannungsamplitude U0 und Scheinwiderstand R2 + ω 2 L2 ist. Der Wechselstrom besitzt die gleiche Frequenz wie die Wechselspannung, ist allerdings um den Phasenwinkel ϕ pha- 15.5 Beschreibung von linearen Systemen 973 Abb. 15.26. Stromverlauf I(t) bei einem RL-Wechselstromkreis senverschoben. Durch die Kenntnis der Impulsantwort ist man also über den Faltungssatz in der Lage, die Reaktion eines LZK-Systems auf ein beliebiges Eingangssignal zu berechnen. Es stellt sich somit die wichtige Frage, wie man die Impulsantwort bestimmen kann. Dazu gibt es prinzipiell zwei unterschiedliche Vorgehensweisen: (1) Zum einen kann man in manchen Fällen zunächst die Fourier-Transformierte der Impulsantwort bestimmen, wenn -wie in unserem Beispiel- das lineare System durch eine Differenzialgleichung beschrieben wird. Durch die inverse Fourier-Transformation berechnet sich anschließend die Impulsantwort. Es zeigt sich für elektrische Netzwerke, dass die FourierTransformierte der Impulsantwort über die Anordnung der R-, C-, LBauelemente direkt bestimmbar ist. Dies führt auf den Begriff der Übertragungs- bzw. Systemfunktion (15.5.3 und 15.5.4). (2) Wenn die Anordnung des linearen Systems nicht im Detail bekannt ist, das System also nur als ”black-box”-System zur Verfügung steht, so kann man die Impulsantwort experimentell bestimmen, indem man das System mit der Impulsfunktion anregt. Die zugehörige Systemreaktion ist dann die Impulsantwort. Einfacher als die Impulsfunktion ist die Sprungfunktion (= Einschaltfunktion) realisierbar. Über die Sprungantwort (= Reaktion des Systems auf die Sprungfunktion S (t)) ist die Impulsantwort ebenfalls berechenbar. Den Zusammenhang zwischen Sprung- und Impulsantwort stellen wir in 15.5.5 dar. 974 15. Fourier-Transformation 15.5.3 Die Systemfunktion (Übertragungsfunktion) Das Konzept der Systemfunktion liefert ein Kalkül, die Fourier-Transformierte der Impulsantwort zu bestimmen. 1. Methode: Wir wählen als spezielles Eingangssignal für ein LZK-System L die komplexe Exponentialfunktion x (t) = ei ω t . Ist h (t) die Impulsantwort des Systems, bestimmt sich die Systemantwort y (t) über das Faltungsintegral von x (t) mit h (t): Z ∞ Z ∞ ei ω (t−τ ) h (τ ) dτ = ei ω t e−i ω τ h (τ ) dτ . y (t) = (h ∗ x) (t) = −∞ −∞ Die Antwort des Systems ist wieder eine Exponentialfunktion multipliziert mit der komplexen Amplitude Z ∞ e−i ω τ h (τ ) dτ . H (ω) := (1) −∞ H (ω) wird als Systemfunktion oder Übertragungsfunktion bezeichnet. Die Systemfunktion ist die Fourier-Transformierte der Impulsantwort! Die Reaktion des LZK-Systems auf das Eingangssignal x (t) = ei ω t ist eine Funktion mit dem Zeitverhalten ei ω t und komplexer Amplitude H (ω). Regt man also ein LZK-System harmonisch mit der Frequenz ω und Amplitude 1 an, so ist die Systemreaktion wieder eine harmonische Funktion mit gleicher Frequenz ω aber mit anderer (in der Regel betragsmäßig kleinerer) Amplitude H (ω). Da H (ω) eine komplexe Amplitude darstellt, sind hierin sowohl die Information über den Betrag der Ausgangsamplitude |H (ω)| als auch die H(ω) Phasenbeziehung zwischen Eingangs- und Ausgangssignal tan ϕ (ω) = Im Re H(ω) enthalten. 2. Methode: Da y (t) = H (ω) ei ω t die Systemreaktion auf das Eingangssignal x (t) = ei ω t ist, gilt y (t) = L [x (t)] , iωt ⇒ H (ω) e i ω t L ei ω t =L e ,→ H (ω) = . ei ω t 15.5 Beschreibung von linearen Systemen 975 Die Systemfunktion ist demnach gegeben durch H (ω) = y (t) x (t) x(t)=ei ω t . (2) Man erhält die Übertragungsfunktion H(ω) zu einer vorgegebenen Frequenz ω, wenn man speziell für die Eingangsfunktion x(t) = ei ω t das Verhältnis von zugehöriger Ausgangs- zu Eingangsfunktion im Zeitbereich bildet. Beispiel CD.75. In Beispiel 15.73 wurde die Fourier-Transformierte von h (t) bestimmt, indem als Eingangsfunktion δ (t) gewählt wurde. Jetzt berechnen wir nochmals die Systemfunktion für das System g 0 (t) + α g (t) = f (t) , (∗) indem wir f (t) = ei ω t und zugehörig g (t) = H (ω) ei ω t setzen. f und g in die Differenzialgleichung (∗) eingesetzt, liefert i ω H (ω) ei ω t + α H (ω) ei ω t = ei ω t ⇒ H (ω) = 1 . α + iω Dies ist dasselbe Ergebnis wie wir in Beispiel 15.16 als Fourier-Transformierte der Impulsantwort erhalten haben. Erkenntnis: Impulsantwort und Systemfunktion sind äquivalente Kenngrößen für lineare Systeme, die sich mittels der FourierTransformation umrechnen lassen. Systeme mit gleicher Impulsantwort bzw. Systemfunktion reagieren auf gleiche Eingangssignale mit gleichen Ausgangssignalen. 3. Methode: Wir geben neben Gleichung (1) und (2) noch eine dritte Möglichkeit an, die Systemfunktion zu bestimmen. Dazu gehen wir von einem beliebigen Eingangssignal f (t) aus. Sei g (t) das zugehörige Antwortsignal, dann ist nach dem Faltungssatz g (t) = (f ∗ h) (t) . Wir wenden auf diese Gleichung die Fourier-Transformation an und benutzen das Faltungstheorem (F9 ): F (g) = F (f ∗ h) = F (f ) · F (h) . (3) 976 15. Fourier-Transformation Bezeichnet F (ω) die Fourier-Transformierte des Eingangssignals f (t), G (ω) die Fourier-Transformierte des Ausgangssignals g (t) und H (ω) die FourierTransformierte der Impulsantwort h (t), so schreibt sich Gleichung (3): G (ω) = F (ω) · H (ω) ⇒ H (ω) = G (ω) . F (ω) (4) Gleichung (4) besagt, dass die Übertragungsfunktion H (ω) bestimmt werden kann, indem für ein beliebiges Eingangssignal f (t) das Spektrum des zugehörigen Ausgangssignals G (ω) durch das Spektrum des Eingangssignals F (ω) dividiert wird. Diese dritte Alternative zur Berechnung der Übertragungsfunktion ist die allgemeinste und enthält die Alternativen (1) und (2) als Spezialfälle. Zusammenfassung: (Systemfunktion). Es stehen drei äquivalente Möglichkeiten zur Berechnung der Systemfunktion H (ω) eines LZKSystems zur Verfügung: (1) H (ω) ist die Fourier-Transformierte der Impulsantwort: Z ∞ H (ω) = h (t) e−i ω t dt . −∞ (2) Für die spezielle Eingangsfunktion x (t) = ei ω t ist H (ω) die komplexe Amplitude der Antwortfunktion y (t) = H (ω) ei ω t : y (t) H (ω) = . x (t) x(t)=ei ω t (3) Ist F (ω) das Spektrum des Eingangs- und G (ω) das Spektrum des zugehörigen Ausgangssignals, dann ist H (ω) = G (ω) . F (ω) 15.5 Beschreibung von linearen Systemen 977 Beispiel 15.18 (Zusammenfassendes Beispiel). Gegeben ist ein System, das durch die Differenzialgleichung y 000 (t) + a1 y 0 (t) + a0 y (t) = f (t) beschrieben wird. Wir bestimmen auf drei alternativen Wegen die Systemfunktion H (ω). (1) H (ω) ist die Fourier-Transformierte der Impulsantwort h (t) = L [δ (t)]. Setzen wir also f (t) = δ (t), dann ist y (t) = h (t) h000 (t) + a1 h0 (t) + a0 h (t) = δ (t) . Durch Anwenden der Fourier-Transformation auf die Differenzialgleichung ist F (h000 ) + a1 F (h0 ) + a0 F (h) = F (δ) . Wegen H (ω) = F (h) (Übertragungsfunktion = Fourier-Transformierte der Impulsantwort) folgt mit der Ableitungsregel (F8 ) 3 (i ω) H (ω) + a1 i ω H (ω) + a0 H (ω) = 1 ⇒ H (ω) = 1 3 (i ω) + a1 i ω + a0 (∗1 ) . (∗2 ) (2) Setzen wir als spezielles Eingangssignal x (t) = ei ω t (= f (t)), ist die Systemantwort y (t) = ei ω t H (ω). In die Differenzialgleichung eingesetzt, folgt 000 0 ei ω t H (ω) + a1 ei ω t H (ω) + a0 ei ω t H (ω) = ei ω t 3 ,→ (i ω) ei ω t H (ω) + a1 (i ω) ei ω t H (ω) + a0 ei ω t H (ω) = ei ω t . Division dieser Gleichung durch ei ω t liefert (∗1 ) und damit als Übertragungsfunktion ebenfalls (∗2 ). (3) Ist f (t) das Eingangssignal und g (t) das zugehörige Ausgangssignal, ist die Beziehung zwischen f und g durch die Differenzialgleichung gegeben g 000 (t) + a1 g 0 (t) + a0 g (t) = f (t) . 978 15. Fourier-Transformation Anwenden der Fourier-Transformation F (g 000 ) + a1 F (g 0 ) + a0 F (g) = F (f ) mit Ableitungsregel (F8 ) ergibt 3 (i ω) F (g) + a1 (i ω) F (g) + a0 F (g) = F (f ) . Mit F (ω) = F (f ) und G (ω) = F (g) gilt 3 (i ω) + a1 (i ω) + a0 G (ω) = F (ω) ⇒ H (ω) = G (ω) 1 = . 3 F (ω) (i ω) + a1 i ω + a0 Dies ist dasselbe Ergebnis für H(ω) wie unter (1) und (2). Die Systemfunktion kann in vielen Fällen einfacher bestimmt werden als die Impulsantwort. Ist sie bekannt, so bestimmt sich die Impulsantwort durch die inverse Fourier-Transformation. Welche der drei Alternativen zur Berechnung der Systemfunktion genommen wird, hängt von der konkreten Problemstellung ab. Ein Vorteil der Systemfunktion (= Übertragungsfunktion) gegenüber der Impulsantwort liegt z.B. bei der Anwendung auf elektrische Netzwerke darin, dass die Systemfunktion direkt über die komplexen Widerstände bestimmt werden kann und man nicht erst die zugehörige Differenzialgleichung aufstellen und lösen muss, wie wir im nächsten Abschnitt exemplarisch zeigen werden. 15.5 Beschreibung von linearen Systemen 979 15.5.4 Übertragungsfunktion elektrischer Netzwerke Bei elektrischen Netzwerken, bestehend aus Ohmschen Widerständen, Kapazitäten und Induktivitäten, sind die Spannungen beim Anlegen eines komplexen Wechselstromes I (t) = ei ω t gemäß den physikalischen Gesetzmäßigkeiten, bestimmt durch UΩ (t) = R I (t) (Ohmsches Gesetz) dI = L i ω I (t) = R̂L I (t) dt Z 1 1 I (t) = R̂C I (t) UC (t) = I (τ ) dτ = C iωC UL (t) = L (Induktionsgesetz) (Kondensatorspannung). Durch diese Gleichungen ordnet man der Induktivität und der Kapazität komplexe Widerstände entsprechend R̂L = i ω L und R̂C = i ω1 C zu (siehe 5.3.3). Die Übertragungsfunktion für RCL-Wechselstromkreise berechnet sich durch Division der Ausgangsspannung Ua (t) = R̂a Ia (t) durch die Eingangsspannung Ue (t) = R̂ges I (t). Dabei ist R̂ges der komplexe Gesamtwiderstand des Schaltkreises und R̂a der Ersatzwiderstand für das Bauteil, an dem die Spannung Ua (t) abgegriffen wird. Dies entspricht der Alternative (2) zur Berechnung der Übertragungsfunktion, da y (t) Ua (t) R̂a Ia (t) H (ω) = = = . x (t) x(t)=ei ω t Ue (t) R̂ges I (t) Der Vorteil der Einführung von komplexen Widerständen ist, dass die Berechnung der Ersatzschaltung analog dem Gleichstromkreis erfolgt: Der komplexe Gesamtwiderstand in Reihe geschalteter Bauelemente ist die Summe der komplexen Einzelwiderstände. Der komplexe Ersatzleitwert R̂1 parallel geschalteter Bauelemente ist die Summe der komplexen Einzelleitwerte. Anwendungsbeispiel CD.76 (System mit einem Energiespeicher). Gesucht ist die Übertragungsfunktion und die Impulsantwort für die in Abb. 15.27 skizzierte Schaltung mit einem Energiespeicher. Abb. 15.27. System mit einem Energiespeicher 980 15. Fourier-Transformation Der Ersatzwiderstand R̂a für die an der Spule abgegriffenen Spannung ist 1 R̂a = 1 1 R + iωL iωRL + = ⇒ R̂a = , iωL R RiωL R + iωL da Spule und Widerstand parallel geschaltet sind. Der Gesamtwiderstand ist gegeben durch R̂ges = R + R̂a . iωRL ⇒ H (ω) = Ua R̂a I (t) iωL R+i ω L = = = . i ω R L Ue R + 2iωL R + R+i ω L R̂ges I (t) Man kann allgemein zeigen [Vielhauer, P.: Passive Lineare Netzwerke, HüthigVerlag, l974], dass die Übertragungsfunktion für ein System mit einem Energiespeicher gegeben ist durch H1 (ω) = a0 + a1 i ω b0 + i ω mit reellen Koeffizienten a0 , a1 ; b0 > 0. Um aus der Übertragungsfunktion H1 (ω) die Impulsantwort zu bestimmen, formen wir H1 (ω) durch Polynomdivision um 1 H1 (ω) = a1 + (a0 − a1 b0 ) . b0 + i ω Damit hat man die Fourier-Transformierte der Impulsantwort in zwei bereits bekannte Transformierte zerlegt: −b0 t F e F (δ) (ω) = 1, 1 S (t) (ω) = . b0 + i ω Folglich ist die Impulsantwort: h (t) = a1 δ (t) + (a0 − a1 b0 ) e−b0 t S (t). Für unseren Spezialfall H1 (ω) = ist a0 = 0, a1 = 1 2 und b0 = iωL = R + iωL 1 2 R 2L iω + iω R 2L. ⇒ h1 (t) = 1 R −R t δ (t) − S (t) e 2L . 2 4L 15.5 Beschreibung von linearen Systemen 981 Abb. 15.28. Impulsantwort für ein System mit einem Energiespeicher System mit einem Energiespeicher mit Maple Das gleiche Ergebnis hätte man auch direkt mit Maple gewinnen können. Für den allgemeinen Fall einer Übertragungsfunktion für ein System mit einem Energiespeicher gilt > with(inttrans): > assume(b0 > 0): > H1(w) := (a0 + a1 ∗ I ∗ w) / (b0 + I ∗ w): > invfourier(H1(w), w, t): > h(t) := simplify(%); h (t) := a0 e−b0˜ t Heaviside (t) − a1 b0˜ e−b0˜ t Heaviside (t) + a1 Dirac (t) Anwendungsbeispiel CD.77 (System mit zwei Energiespeicher, mit Maple). Gesucht ist die Übertragungsfunktion und die Impulsantwort für die in Abb. 15.29 skizzierte Schaltung mit zwei Energiespeichern. Abb. 15.29. System mit zwei Energiespeichern Der Widerstand R̂C für die an der Kapazität abgegriffene Spannung ist R̂C = 1 i ω C . Der Gesamtwiderstand für die in Reihe geschalteten Elemente ist R̂ges = R + i ω L + i ω1 C . Damit ist die Übertragungsfunktion gegeben durch das Verhältnis von Ausgangssignal und Eingangssignal H2 (ω) = Ua (t) R̂C I (t) R̂C = = Ue (t) R̂ges I (t) R̂ges 982 15. Fourier-Transformation = 1 iωC R + iωL + 1 iωC = 1 2 1 + (i ω) L C + i ω R C . Bei Systemen mit zwei Energiespeichern hat die Übertragungsfunktion folgende allgemeine Form 2 H2 (ω) = a0 + a1 i ω + a2 (i ω) 2 b0 + b1 i ω + (i ω) wobei alle Koeffizienten reell und b0 > 0, b1 > 0 sind [Vielhauer]. Durch Partialbruchzerlegung stellt sich H2 (ω) dar als Summe von Brüchen H2 (ω) = a2 + mit A1 = A1 A2 + i ω − p1 i ω − p2 c0 + c1 p1 c0 + c1 p2 , A2 = und c0 = a0 − a2 b0 , c1 = a1 − a2 b1 ; p 1 − p2 p2 − p1 r r b21 b1 b21 b1 p1 = − + − b0 , p 2 = − − − b0 . 2 4 2 4 Somit ist h (t) = a2 δ (t) + A1 S (t) ep1 t + A2 S (t) ep2 t die Impulsantwort. Man kann dieses Ergebnis auf Beispiel CD.77 übertragen oder direkt für H2 (ω) die inverse Fourier-Transformation mit Maple berechnen. Für R=L=C=1 gilt > with(inttrans): > H2(w) := 1/(1 + I∗w + (I∗w)ˆ2): > invfourier(H2(w), w, t): > h(t) := simplify(%); 1√ 2√ −1 t 3 e 2 Heaviside (t) sin 3t h (t) = 3 2 Abb. 15.30. Impulsantwort für ein System mit zwei Energiespeichern 15.5 Beschreibung von linearen Systemen 983 15.5.5 Zusammenhang zwischen der Sprung- und Deltafunktion Als Sprungfunktion (Heavisidefunktion) bezeichnen wir die Funktion S (t) = 0 für t < 0 1 für t > 1. Die Sprungfunktion nähert den Einschaltvorgang für Systeme an, die für t < 0 ausgeschaltet und für t > 0 eingeschaltet sind. Mit Hilfe von S (t) ist oft eine besonders einfache Bestimmung der Impulsantwort möglich. Da S (t) in t = 0 nicht stetig ist, kann man diese Funktion im Punkte t = 0 nicht ohne weiteres differenzieren. Es zeigt sich aber, dass die Ableitung von S (t) trotzdem gebildet werden kann, wenn man die Deltafunktion als Ergebnis zulässt! Zur Klärung betrachten wir die Bildfolge in Abb. 15.31 (a) - (d). Zunächst ist in (a) eine Familie Sε (t) abgebildet, die für ε → 0 in die Sprungfunktion S (t) übergeht (b): S (t) = lim Sε (t) . ε→0 Abb. 15.31. Von der Sprungfunktion zur Deltafunktion 984 15. Fourier-Transformation In (c) bilden wir die Ableitung Sε0 (t) = δε (t), die mit der Familie δε (t) identisch ist. Für ε → 0 gilt: lim δε (t) = δ (t) . ε→0 Als Ergebnis gewinnen wir die Beziehung d S (t) = δ (t). dt Mit dieser Beziehung lassen sich auch andere Funktionen differenzieren, die eine Sprungstelle aufweisen. Beispiel 15.19. Man differenziere die Funktion x (t). Abb. 15.32. Aus der Darstellung der Funktion x (t) erkennt man, dass x (t) = 3 S (t) − 3 S (t − 2) . d S (t) erhalten wir mit den üblichen Regeln der Mit Hilfe der Formel δ (t) = dt Differenziation die Ableitung x0 (t) = 3 δ (t) − 3 δ (t − 2) , welche Abb. 15.33 dargestellt ist. Abb. 15.33. Bei der Ableitung einer Funktion mit Sprungstelle bei t0 muss neben der üblichen Ableitung noch die Deltafunktion δ (t − t0 ) mit dem Faktor der Sprunghöhe hinzuaddiert werden. 15.5 Beschreibung von linearen Systemen 985 Zusammenhang zwischen Impuls- und Sprungantwort. Wir definieren die Sprungantwort SA (t) als die Reaktion eines LZK-Systems auf die Sprungfunktion S (t): SA (t) = L [S (t)] Aufgrund der Beziehung δ (t) = Sprungantwort d dt (Sprungantwort). S (t) gilt formal für die Ableitung der d d d SA (t) = L [S (t)] = L S (t) = L [δ (t)] . dt dt dt L [δ (t)] ist die Reaktion des Systems auf die Impulsfunktion, also die Impulsantwort h (t). ⇒ h (t) = d SA (t). dt Die Ableitung der Sprungantwort ist die Impulsantwort. Beispiel CD.78. Gegeben ist die Sprungantwort SA(t) des RC-Kreis. 1 SA (t) = S (t) 1 − e− R C t . d SA (t) ist die Gesucht ist die Impulsantwort. Durch die Beziehung h (t) = dt Impulsantwort 1 1 h (t) = SA0 (t) = δ (t) 1 − e− R C t + S (t) R1C e− R C t . Wegen der Eigenschaft der δ-Funktion δ (t) f (t) = δ (t) f (0) gilt weiter h (t) = δ (t) · 0 + S (t) 1 RC 1 e− R C t = S (t) 1 RC 1 e− R C t . Abb. 15.34. Zusammenhang zwischen Sprungantwort und Impulsantwort 986 15. Fourier-Transformation Zusammenfassung: (Impulsantwort). Ein lineares, zeitinvariantes, kausales System L (LZK-System) wird durch die Impulsantwort h (t) vollständig charakterisiert; denn nach dem Faltungssatz kann für ein beliebiges Eingangssignal f (t) das Ausgangssignal g (t) = L [f (t)] berechnet werden durch Z ∞ f (τ ) h (t − τ ) dτ . g (t) = (f ∗ h) (t) = −∞ Es gibt drei alternative Möglichkeiten, die Impulsantwort h (t) eines Systems zu bestimmen: (1) Die Impulsantwort ist die Reaktion des Systems auf das Eingangssignal δ (t): h (t) = L [δ (t)] . (2) Die Impulsantwort ist die Ableitung der Sprungantwort SA (t) = L [S (t)]: d h (t) = SA (t) . dt (3) Ist H (ω) die Systemfunktion (Übertragungsfunktion), dann ist h (t) die inverse Fourier-Transformierte von H (ω): Z ∞ 1 h (t) = H (ω) ei ω t dω . 2π −∞