Kapitel 7 Lineare Abbildungen
Werbung

Kapitel 7
Lineare Abbildungen
7.1
Motivation
Verschieben, Drehen und Scheren sind parallelentreu, d.h sie lassen sich auch als Abbildung zwischen Vektorräumen fomulieren. Die Verschiebung, beispielsweise, kann
dargestellt werden !v !→ !v +!a,worin !a irgendein fester Vektor – der Verschiebungsvektor. Eine Skalierung !v !→ λ!v , worin λ ∈ R irgendeine feste Zahl – der Skalenfaktor.
Eine zweidimensionale Scherung !v !→ (v 1 +σv 2 )!e1 +v 2!e2 , wobei !e1 Vektor in Richtung
der Scherachse, und σ ∈ R irgendeine feste Zahl – das Schermodul. Eine zweidimensionale Drehung schließlich
c
$Martin
Wilkens
89
7. März 2012
90
Lineare Abbildungen
7.2
Definition
Definition “Lineare Abbildung”: Seien V, W Vektorräume. Eine Abbildung A :
V → W heißt linear, genau dann wenn
A(λ1!v1 + λ2!v2 ) = λ1 A(!v1 ) + λ2 A(!v2 )
(7.1)
Kurz: unter einer linearen Abbildung werden Linearkombinationen auf Linearkombinationen abgebildet.
Um zu betonen, dass man es hier mit Abbildungen zwischen Vektorräumen zu tun
hat laufen die linearen Abbildungen zwischen Vektorräumen auch unter dem Begriff des Vektorraumhomomorphismus, zuweilen kurz “Homomorphismus”. Homomorphismen begegnen einem in der Mathematik aller Orten. Ihren diversen Ausprägungen gemein ist, dass sie die Rechenregeln respektieren, die für die zugrundeliegenden Mengen gelten.
Je nach Eigenschaft werden lineare Abbildungen klassifiziert. Ein Vektorraumhomomorphismus A : V → W heißt
Monomorphismus, wenn A injektiv
Epimorphismus, wenn A surjektiv
Isomorphismus, wenn A injektiv und surjektiv, also bijektiv
Endomorphismus, wenn V = W ,
Automorphismus, wenn V = W und A bijektiv.
Linearform wenn W eindimensionaler Vektorraum
7. März 2012
90
c
$Martin
Wilkens
7.2 Definition
91
Hatte ich schon erwähnt, dass das Studium der Mathematik dem Erlernen einer
Fremdsprache entspricht?
Zwei Vektorräume V, W heißen isomorph, wenn es einen Isomorphismus A : V → W
gibt. Je zwei Vektorräume über dem gleichen Körper sind isomorph sofern sie nur von
gleicher Dimension. Insbesondere sind also alle n-dimensionalen reellen Vektorräume
isomorph dem Vektorraum Rn der Zahlenspalten.
Beim Studium einer linearen Abbildung A : V → W sind folgende Begriffe nützlich
BildA ≡ A(V ) := {A(!v )|!v ∈ V } ⊂ W , ein Untervektorraum von W
KernA := {!v ∈ V |A(!v ) = o} ⊂ V , ein Untervektorraum von V
rgA := dimBildA, der Rang von A. Damit die Dimensionsformel für lineare Abbildungen
dimKern + dimBild = dimV
(7.2)
Lineare Abbildungen können “verkettet” werden. Hat man beispielsweise eine lineare
Abbildung A : V → W und eine lineare Abbildung B : W → Y , so ist mit C := B◦A
(Reihenfolge beachten!) eine lineare Abbildung C : V → Y verabredet.
Sofern Urbild- und Bildraum isomorph, insbesondere also von gleicher Dimension,
und A : V → W von vollem Rang, dimBild(A) = dimV , kann A invertiert werden.
Das Inverse von A wird dann notiert A−1 , wobei A ◦ A−1 = A−1 ◦ A = idV mit idV
die lineare Abbildung “Identität”, idV (!v ) = !v für alle !v ∈ V .
c
$Martin
Wilkens
91
7. März 2012
92
Lineare Abbildungen
7.3
Matrixdarstellung
Eine lineare Abbildung A : V → W ist vollständig durch die Bilder einer Basis
(!a1 , . . . , !an ) ⊂ V charakterisiert. Seien also !ai gewisse Basisvektoren des V , und !bµ
Basisvektoren des W .1 Das Bild A(!ai ) des i-ten Basisvektors von V ist ein Vektor
in W , und also ein Linearkombination von Basisvektoren aus W , A(!ai ) = !bµ Aµ i .
Die Koeffizienten Aµ i sind die Darstellung der linearen Abbildung A bezüglich der
Basen !bi , !cµ .
Die Abbildung eines allgemeinen Vektors !v = !ai v i kann nun – der Linearität von A
sei Dank – leicht angegeben werden !v !→ w
! = !bµ Aµ i v i , notiert für die Entwicklungskoeffizienten wµ des Bildvektors w
! = !cµ wµ
w µ = Aµ i v i .
(7.3)
wobei wir hier von Einstein’schen Summenkonvention Gebrauch machen: “über doppelt auftretende, schräg gestellte Indices wird summiert!”, also
Aµ i v i ≡
n
!
i=1
Aµ i v i = Aµ 1 v 1 + Aµ 2 v 2 + · · · + Aµ n v n ,
(7.4)
wobei n die Dimension des Vektorraums V , also n = dim(V ).
Die Kurzschreibweise ist für allgemeine Überliegungen nützlich, für konkrete Rechnungen aber ein Alptraum. “Konkrete Rechnung” heißt, dass die Gesamtheit der Aµ i
als m × n Zahlen vorliegen, und man wissen will, welche Werte die m Zahlen wµ für
eine gegebene Gesamtheit von n Zahlen v i annehmen. Für solcherart Rechnungen
Dass wir hier die Basis von V mit einem lateinischen Buchstaben i abzählen, die Basis von
W hingegen mit einem griechischen Buchstaben hat keinerlei mathematische Bedeutung, sondern
dient der schnellen Identifizierung “wo jemand hingehört” (ob zu V oder zu W ).
1
7. März 2012
92
c
$Martin
Wilkens
7.4 Determinante
93
wird () gerne in einer sog. Matrixschreibweie notiert,
w1
A1 1 A1 2 . . . A1 n
w2 A2 1 A2 2 . . . A2 n
.. = ..
..
..
.
.
. .
.
.
.
m
m
m
m
w
A 1 A 2 ... A n
)*
+
(
Die m × n-Matrix (Aµi )
v1
v2
..
.
vn
(7.5)
wobei die Berechnungsvorschrift lautet: Kippe den Spaltenvektor rechts in die Waagrechte, lege ihn über die µ-te Zeile, summiere die Produkte der übereinanderliegenden Zahlen – und das Resultat ist der µ-te Eintrag im Spaltenvektor links.
Die Verkettung einer linearen Abbildung A : V → W und einer linearen Abbildung
B : W → Y , also die Abbildung C := B ◦ A, wird in einer Basis (!c1 . . . !cl ) ⊂
Y dargestellt C(!v ) = !ca B a µ Aµ i v i , bzw. C(!v ) = !ha C a i v i mit C a i = B a µ Aµ i , in
“Matrixschreibweise
A1 1 . . . A1 n
C 11 . . . C 1n
B11 . . . B1m
..
..
.. = ..
.. ..
..
..
..
(7.6)
.
.
.
.
.
. .
. .
C l1 . . . C ln
Bl1 . . . Blm
Am 1 . . . Am n
mit der Rechenvorschrift der sog. Matrixmultiplikation: Kippe die j-te Spalte die
Matrix A über die a-te Zeile der Matrix B, summiere die Produkte der übereinanderliegenden Zahlen – das Resultat ist das Element C a j der Matrix C.
7.4
Determinante
Die Determinante ist eine Abbildung (ja, ja – schon wieder), die jeder linearen Abbildung A : V → V eine Zahl det(A) zuweist, wobei . . . wie bitte? Die genaue Definition
c
$Martin
Wilkens
93
7. März 2012
94
Lineare Abbildungen
verschieben wir auf später, hier nur das Rezept, die Determinante einer gegebenen
n × n-Matrix (= n × n-quadratisches Zahlenschema) auszurechnen (Entwicklung
nach der ersten Spalte):
A1 1 · · · A1 n
.. = A1 |A | − A2 |A | + A3 |A | − . . . + (−1)n+1 An |A |
det ...
1
1
1
1
.
11
21
31
n1
n
n
A 1 ··· A n
(
)*
+
:=A
(7.7)
, ,
,
,
worin Aij = det(Aij ) mit Aij diejenige Matrix, die aus A nach Streichen der i-ten
Zeile und der j-ten Spalte übrigbleibt.
Für eine 2 × 2-Matrix ergibt sich beispielsweise
-
a b
c d
.
= ad − bc ,
(7.8)
a1 b 1 c 1
det a2 b2 c2 = . . .
a3 b 3 c 3
(7.9)
det
und für die 3 × 3-Matrix
Das Rezept zur Berechnung des Spatprodukts lautet nun: trage die R3 -Darstellung
der drei Vektoren !a, !b und !c als Zahlenspalten in einer 3 × 3-Matrix ein. Die Determinante dieser Matrix ist dann das Spatprodukt !a · (!b × !c).
7. März 2012
94
c
$Martin
Wilkens
7.5 Drehungen und Spiegelungen im R2
7.5
95
Drehungen und Spiegelungen im R2
Wir betrachten den Euklidischen Vektorraum R2 , und suchen lineare Abbildungen
R, die das Skalarprodukt respektieren, also (Ru) · (Rv) = u · v.
Eine lineare Abbildung, die das Skalarpodukt respektiert, respektiert immer auch
die Norm *R!a*2 = *!a*2 , d.h. Einheitsvektoren werden unter R auf Einheitsvektoren
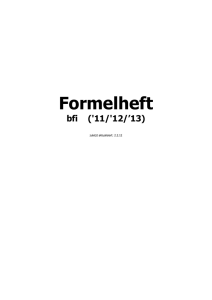
abgebildet. Das gilt insbesondere für die kanonischen Einheitsvektoren des R2 deren
Bild bekanntlich
.die Spalten von R. Mit Blick auf die nebenstehende Abbildung ist
cos ϕ
Re1 =
. Für das Bild von e2 – es muss senkrecht auf Re1 stehen – bleiben
sin ϕ
.
.
− sin ϕ
sin ϕ
zwei Möglichkeiten: Re2 =
oder Re2 =
.
cos ϕ
− cos ϕ
Zusammengefasst: Eine 2 × 2-Matrix R, die das Skalarprodukt respektiert, (R!a) ·
(R!b) = !a · !b, ist von notwendig von der Form
R=
-
cos ϕ − sin ϕ
sin ϕ cos ϕ
.
oder R =
-
cos ϕ − sin ϕ
sin ϕ cos ϕ
.
(7.10)
Matrizen der Form () bleiben beim Multiplizieren “unter sich”
7.6
Aufgaben
% Aufgabe 7-1 *
c
$Martin
Wilkens
(3 Punkte)
95
7. März 2012
96
Lineare Abbildungen
Berechnen Sie
-
1 2
3 4
.-
5
7
.
1 2 3
5
0 1 0 −7
−2 1 4
13
% Aufgabe 7-2 *
(7.11)
(4 Punkte)
Gegeben zwei Matrizen
1 2 3
A= 0 1 0
−2 1 4
3 −2 1
B = 1 2 −3
2 3
1
(7.12)
Berechnen Sie die beiden Matrixprodukte A B und B A und bestimmen Sie den
Kommutator [A, B] = A B − B A.
% Aufgabe 7-3 *
Man bestimme die Determinante und die Inverse
.
1
1 2
0
,
3 4
−2
% Aufgabe 7-4
(6 Punkte)
der folgenden Matrizen
2 3
1 0
1 4
(7.13)
(7 Punkte)
Ein Körper kreiselt um ein gewisse Achse !n mit Kreisfrequenz ω. Man überzeuge
sich, dass ein Körperkrümel, der sich zur Zeit t am Ort !r(t) befindet, eine Geschwindigkeit !v (t) = ω
! × !r(t) aufweist, wo ω
! = ω!n.
Für gegebenes ω
! hängt !v linear von !r ab. Wie lautet die Matrixdarstellung der
Gleichung !v = ω
! × !r?
7. März 2012
96
c
$Martin
Wilkens