Sandwiches mit riesigem Magnetwiderstand
Werbung

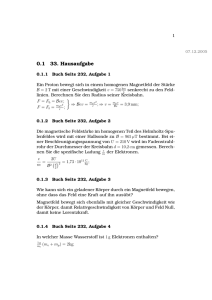
Magnetoelektronische Bauelemente Sandwiches mit riesigem Magnetwiderstand J OACHIM W ECKER | R ALF K INDER | R ALF R ICHTER Magnetische Dünnschichten haben schon jetzt große Bedeutung als Speichermedien. Neue, riesige Magnetwiderstandseffekte in Dünnschichtstrukturen aus verschiedenen Materialien könnten die Sensor- und Speichertechnik weiter revolutionieren. agnetische Dünnschichten haben im Zeitalter der Informationsgesellschaft schon immer eine tragende Rolle gespielt: Als Speichermedien insbesondere in Festplatten bilden sie die Grundlage dafür, um die stetig zunehmenden Datenmenge zumindest technisch zu bewältigen. Als Sensoren in Leseköpfen ermöglichen sie auch das Lesen dieser Daten. In den letzten 15 Jahren hat die Entwicklung von Bauelementen aus dünnen ferromagnetischen Schichten einen bisher nie gekannten Aufschwung erlebt. Er wurde durch die Entdeckung neuartiger Magnetwiderstandseffekte ausgelöst. Magnetwiderstandseffekte, auch magnetoresistive Effekte genannt, beschreiben eine charakteristische Eigenschaft dieser Bauelemente: Wirken auf sie Magnetfelder von außen ein, dann ändern sie ihren elektrischen Widerstand. Das lässt sich zum Beispiel für Magnetfeldsensoren nutzen. Die erste Generation solcher Sensoren enthielt eine einzelne magnetische Schicht aus weichmagnetischem NiFe (Permalloy). In den 1980-er Jahren wurden dann vermehrt magnetische Viellagensysteme untersucht, deren einzelne Schichten teilweise aus nur wenigen Atomlagen bestanden. 1988 machten Peter Grünberg am Forschungszentrum Jülich und Albert Fert an der Universität Paris eine EntINTERNET deckung: Ein äußeres Magnetfeld kann in einer periodischen Abfolge aus Eisen- und Chrom-Schichten den elekGrundlagen und Anwendungen magnetischer Materialien trischen Widerstand bis zu 45 % änwww.almaden.ibm.com/st/ dern [1,2]. Der Mechanismus beruht disciplines/magnetism/ darauf, dass das Magnetfeld die zunächst antiparallelen MagnetisieVerschiedene magnetische Sensoren rungen benachbarter Fe-Schichten parwww.infineon.com/products/ sensors/ allel ausrichtet. Die dafür nötigen Magnetfelder waren allerdings sehr hoch. M | 210 | Physik in unserer Zeit | 33. Jahrgang 2002 Nr. 5 | Sie lagen bei rund 160 kA/m, das entspricht etwa dem 5000fachen Erdmagnetfeld. Außerdem ist dieser als Giant Magnetoresistance (GMR, Riesenmagnetwiderstand) bezeichnete Effekt nur bei tiefen Temperaturen auch wirklich „gigantisch“ im Vergleich zu den Widerstandsänderungen in herkömmlichen Materialien. Die besten Ergebnisse erzielten bei Raumtemperatur noch die so genannten anisotrop magnetoresistiven Permalloy-Dünnschichten mit Widerstandsänderungen von nur 2,5 %. Rekordwerte bei Raumtemperatur Erst Stuart Parkin konnte das Tor zu einer Vielzahl von Anwendungen öffnen. 1991 fand er am IBM-Forschungszentrum in Almaden in Vielfachschichten aus Kobalt und Kupfer bei Raumtemperatur einen Rekordwert von 70 % Widerstandsänderung. Auch dieses Material brauchte zunächst noch extrem hohe magnetische Felder für den vollen GMR-Effekt. Dieser Makel wurde bald darauf durch die „Spin-Valve-Strukturen“ („Spin-Ventil-Strukturen“) beseitigt. Die ursprünglichen Schichtsysteme enthielten eine periodische Abfolge von Doppellagen aus je einem magnetischen und einem nichtmagnetischen Element (zum Beispiel Co und Cu bei Parkin oder Fe und Cr bei Grünberg und Fert). Die Spin-Valve-Systeme haben dagegen im einfachsten Fall nur noch zwei magnetische Schichten. Diese beiden Schichten trennt nun eine dünne Zwischenschicht (meist aus Cu), die elektrisch sehr leitfähig, aber unmagnetisch ist. Eine der beiden magnetischen Schichten, die Referenzschicht, ist magnetisch „hart“. Sie lässt sich also nur schwer ummagnetisieren. Die andere magnetische Schicht ist dagegen magnetisch weich: Schon ein niedriges Magnetfeld von etwa 1 kA/m kann ihre Magnetisierung zwischen der parallelen und antiparallelen Ausrichtung relativ zur Referenzschicht umschalten. Die Widerstandsänderung ist allerdings in diesen Spin-Valve-Strukturen mit etwa 5 – 20 % niedriger als in den periodischen Vielfachschichten. Dafür ist ihre Empfindlichkeit, also die Widerstandsänderung je Magnetfeldeinheit, etwa um einen Faktor 10 größer. Abbildung 1 zeigt das Grundprinzip des Schichtaufbaus und die typische Abhängigkeit des elektrischen Widerstands vom äußeren Magnetfeld. R I E S E N M A G N E T W I D E R S TA N D | M AG N E TO E L E K T RO N I K Widerstandänderung beim AMR-Effekt ist jedoch nur klein, in der Anwendung werden etwa 2,5 % erreicht. Deshalb wurden in den letzten Jahren zunehmend Bauelemente auf Basis des GMR-Effekts und des TMR-Effekts entwickelt. Wie bereits erwähnt, sind diese Effekte keine intrinsischen Materialeigenschaften eines Stoffes. Sie werden nur in künstlichen Schichtstrukturen beobachtet, die aus mindestens drei Schichten bestehen. < Wafer mit GMRSensoren. Die Vergrößerung zeigt eine einzelne Sensorbrücke (Abmessungen etwa 1 mm mal 0,5 mm). Der GMR-Effekt Wenige Jahre später lernte man, die metallische Zwischenlage durch einen dünnen Isolator, zum Beispiel aus Aluminiumoxid (Al2O3), zu ersetzen. Durch ihn können die Elektronen von der einen in die andere magnetische Schicht tunneln. In solchen Systemen beobachtet man teilweise sogar noch größere Widerstandsänderungen von bis zu 50 %. Für sie wurde der Begriff „Tunnel Magnetoresistance“ (TMR, Tunnelmagnetwiderstand) geprägt. Damit war der Siegeszug dieser neuartigen Schichtstrukturen eingeläutet. Weltweit wurden Entwicklungen besonders im Hinblick auf den Einsatz in Leseköpfen von Festplattenlaufwerken begonnen. Es zeigte sich aber auch, dass in der normalen Sensortechnik im Konsumenten- und Automobilbereich interessante Anwendungsmöglichkeiten liegen. Schließlich wurde mit den TMR-Schichtsystemen die Tür zu magnetischen Festkörperspeichern (MRAM, Magnetic Random Access Memory) geöffnet. Anders als der DRAM (Dynamic Random Access Memory) könnten sie die Information nichtflüchtig speichern. Magnetoresistive Effekte Die Größe, die den magnetoresistiven Effekt beschreibt, ist die durch das Magnetfeld erzeugte Widerstandsänderung ∆R. Sie wird meist als relative Größe angegeben, die auf einen Referenzwert normiert ist. Das ist in der Regel der Minimalwiderstand Rmin: In GMR-Schichtsystemen sind die ferromagnetischen Schichten durch eine sehr dünne Zwischenlage, den „Spacer“, getrennt. Der Spacer besteht aus einem unmagnetischen, leitfähigen Metall, zum Beispiel Cu. In solchen Systemen fließt bei Betrieb der Strom parallel zu den Schichten dieses Sandwichs. Entscheidend für den GMR-Effekt ist, dass die Beweglichkeit der Elektronen in den Leitungsbändern beider magnetischer Schichten von ihrem Spin abhängt. Betrachten wir beispielsweise die Elektronen aus der unteren Schicht, deren Spinausrichtung in der Bilanz überwiegt: Wenn diese „Majoritäten“ durch den Spacer hindurch wandern, verändern sie ihre Spinausrichtung nicht. Ist die obere Elektrode in der gleichen Richtung magnetisiert, so sind diese Elektronen auch dort Majoritäten; sie werden daher nur wenig gestreut. Weist die obere Elektrode jedoch eine entgegengesetzte Magnetisierung auf, so werden aus den Majoritäten der unteren Elektrode beim Übergang plötzlich Minoritäten, die bei der Bewegung stärker gestreut werden (Abbildung 2 oben). Die gleichen Effekte erleben natürlich auch Elektronen, die aus der oberen Schicht in die untere eintreten. Ein Ersatzschaltbild verdeutlicht den Stromfluss schematisch. Es weist dem Kanal für die Elektronen mit Majoritäts-Spin jeweils einen geringen und dem Spinkanal für die Minoritäten einen hohen elektrischen Widerstand zu (Abbildung 2 unten). Entsprechend den Kirchhoffschen Gesetzen ist in diesem Ersatzschaltbild der Gesamtwiderstand bei paralleler Ausrichtung der Magnetisierungen klein und bei antiparalleler Ausrichtung groß. ABB. 1 | S PI N -VA LV E- PR I N Z I P MR = ∆R/Rmin, MR steht für den englischen Begriff Magnetoresistance (Magnetwiderstand). Bereits seit langem bekannt und auch vielfach angewendet – unter anderem in Leseköpfen – ist der Anisotrope Magnetwiderstandseffekt (AMR). Er beschreibt die Tatsache, dass sich der Widerstand bei einigen ferromagnetischen Materialien signifikant ändert, je nachdem ob der Strom senkrecht oder parallel zur Magnetisierungsrichtung des magnetischen Materials fließt. Die erzielbare Magnetoresistives Bauelement nach dem Spin-Valve-Prinzip. Grün: magnetisch weiche Schicht, blau: magnetisch harte Referenzschicht, rot: Weg eines Elektrons (schematisch). Bei antiparalleler Schaltung der Schichtmagnetisierung ist das Bauelement hochohmig (links), bei paralleler niederohmig. Nr. 5 33. Jahrgang 2002 | | Physik in unserer Zeit | 211 ABB. 2 | G M R- E F F E K T Streuprozesse (schematisch) beim GMR-Effekt. Oben: Bei paralleler Magnetisierung der oberen und der unteren Schicht (links) bewegen sich die Elektronen mit dem MajoritätsSpin relativ ungehindert über die Schichten hinweg, bei antiparaller Ausrichtung werden sie dagegen stark gestreut. Unten: Das Ersatzschaltbild verdeutlicht, dass im ersten Fall der elektrische Widerstand deutlich geringer ist als im zweiten. Grün: Ferromagnet 1, blau: Ferromagnet 2, weiß: Spacer. Plus oder Minus an R kennzeichnen Majoritäts- oder Minoritäts-Spins. Im allgemeinen Fall sind die Magnetisierungsrichtungen nicht exakt parallel oder antiparallel, sondern um einen beliebigen Winkel α gegeneinander orientiert. Dann ist die Widerstandsänderung proportional zu cos α . Diese Schichtsysteme arbeiten wie Spin-Ventile, die mit den Stellungen „auf“ (parallele Magnetisierung) und „zu“ (antiparallel) die Elektronen je nach deren eigener Spinorientierung besser oder schlechter durchlassen. Der TMR-Effekt In TMR-Systemen wird der metallische Spacer durch einem Isolator wie etwa Aluminiumoxid ersetzt. Im Gegensatz zu den GMR-Systemen fließt der Betriebsstrom hier senkrecht zu der Schichtebene. Damit überhaupt ein messbarer Stromfluss auftritt, darf die Isolatorschicht nur sehr dünn sein, etwa 1 – 2 nm. ABB. 3 TUNNELEFFEKT Dann können die Elektronen aus dem Leitungsband der einen ferromagnetischen Elektrode quantenmechanisch durch diese Barriere in das Leitungsband der zweiten Elektrode tunneln. Die Tunnelwahrscheinlichkeit, und damit auch der Stromfluss, hängt von der Breite und der Höhe der Potentialbarriere ab. Diese Parameter werden im Wesentlichen durch die Dicke und das Material des Spacers bestimmt Bei anliegender Spannung U können Elektronen durch eine energetische (Abbildung 3). Entscheidend ist aber, Barriere tunneln, auch wenn ihre Enerdass Elektronen nur dann tunneln gie für ein Überspringen der Barriere können, wenn in der zweiten Elektronicht ausreicht. Der Tunnelstrom hängt de auch Energiezustände nahe der Ferexponentiell von der Barrierendicke t mi-Grenze frei sind. Nur diese können und -höhe Φ ab. EF ist die FermiEnergie. die Elektronen aufnehmen. In ferro- | 212 | Physik in unserer Zeit | 33. Jahrgang 2002 Nr. 5 | magnetischen Stoffen unterscheiden sich aber die Leitungsbänder für die beiden Spinsorten (siehe „Ferromagnetismus und Elektronen“, S. 213). Majoritätselektronen können also nur dann in die andere Elektrode wechseln, wenn dort freie Plätze im passenden Leitungsband für sie verfügbar sind. Die Zahl der freien Plätze ist deutlich größer, wenn die tunnelnden Elektronen in der zweiten Elektrode auch Majoritäten bleiben, also beide Schichten parallel magnetisiert sind (Abbildung 4). Andernfalls verschiebt sich die relative Lage der Energiebänder, und die Tunnelwahrscheinlichkeit sinkt deutlich. Dieses Modell wurde bereits 1975 von Michel Julliére aufgestellt und experimentell bei tiefen Temperaturen bestätigt [4]. Ausgehend von der vereinfachenden Annahme, dass sich die Elektronen an der Fermi-Kante in den Ferromagneten wie freie Elektronen verhalten, lässt sich danach der TMR-Effekt wie folgt berechnen: TMR = P1P2/(1–P1P2), wobei TMR hier wieder für eine relative Widerstandsänderung ∆R/Rmin steht. P1 und P2 sind die jeweilige Spinpolarisation, also der Anteil spinpolarisierter Elektronen in den beiden ferromagnetischen Schichten FM 1 und FM 2 (Abbildung 4). Im Idealfall, wenn beide ferromagnetische Schichten vollständig spinpolarisiert wären (also P1 = P2 = 1), ließe sich ein Schalter konstruieren, der den Strom entweder komplett unterdrückt oder durchlässt. GMR- und TMR-Effekt in der Praxis In der Praxis liegt der Grad der Spinpolarisation für die üblichen ferromagnetischen Elemente (Fe, Co, Ni) und ihre Legierungen bei 30 bis etwa 55 %. Deshalb erwartete man theoretisch TMR-Werte von bis zu 50 %, die auch tatsächlich gemessen werden. Diese Widerstandsänderungen sind also mehr als doppelt so groß wie in GMR-SpinVentilen. Ein wichtiger Unterschied zwischen beiden Schichtkonzepten ist die Tatsache, dass kleine TMR-Strukturen aufgrund der Tunnelbarriere einen deutlich höheren Ausgangswiderstand haben als rein metallische GMR-Syste- > Zustandsdichten in den beiden Ferromagneten FM 1 und FM 2 beiderseits der Tunnelbarriere. Die Elektronen von FM 1 können im gezeigten Beispiel nur nach FM 2 tunneln, wenn in FM 2 Zustände der gleichen Spinrichtung nahe der Fermi-Energie (gestrichelte Linie) frei sind. Bei antiparalleler Magnetisierung der Elektroden (rechts) sind die Tunnelwahrscheinlichkeiten kleiner und damit ist der Widerstand höher. >> Typische Kennlinien von Spin-Valve-Bauelementen für unterschiedliche Orientierungen der äußeren Magnetfelder. 12,5 Oe entsprechen 1 kA/m. R I E S E N M A G N E T W I D E R S TA N D | M AG N E TO E L E K T RO N I K me. Das ist von Bedeutung, wenn als Signal die absolute und nicht die relative Widerstandsänderung (genauer: die durch die Widerstandsänderung hervorgerufene Spannungsänderung) verwendet wird. Diese ist bei einem größeren Ausgangswiderstand natürlich auch größer. Dieser Vorteil kommt vor allem bei Anwendungen zum Tragen, die eine sehr hohe Integrationsdichte und damit kleine Strukturgrößen verlangen, wie magnetische Festkörperspeicher (MRAM). Beide Effekte setzen voraus, dass der Spin des einzelnen Elektrons beim Übergang zwischen den magnetischen Schichten erhalten bleibt. Es darf also keine „Spin-Flip-Streuung“ passieren. Um das zu vermeiden, müssen alle Schichten extrem dünn und ihre Grenzflächen von hoher Qualität sein. Typische Schichtdicken liegen bei wenigen Nanometern, wobei 1 nm etwa vier Atomlagen entspricht. Kristalldefekte wie etwa Korngrenzen und Gitterfehlstellen sind ebenso schädlich wie Störstellen in der (meist) amorphen Tunnelbarriere. Der gesamte Schichtstapel sollte eine Textur aufweisen, das heißt eine bestimmte Kristallorientierung. Besonders kritisch in der TMR-Struktur ist die Qualität des Spacers, da der Tunnelstrom ja exponentiell von der Dicke und der Höhe der Potentialstufe abhängt. Schon kleine Änderungen der Grenzflächenbeschaffenheit und vor allem in der Barrierendicke wirken sich dramatisch auf die Leitfähigkeit aus: Bei Aluminiumoxid von rund 1 nm Dicke verändert zum Beispiel eine Schwankung der Barrierendicke um 0,1 nm (also rechnerisch weniger als eine halbe Atomlage!) die Leitfähigkeit beinahe um eine Größenordnung. Diese hohen Anforderungen an die Schichtqualität sind der Hauptgrund dafür, dass GMR-Elemente erst seit etwa 15 Jahren intensiv erforscht werden. TMR-Strukturen konnten sogar erst in der Mitte der neunziger Jahre ausreichend reproduzierbar hergestellt werden, obwohl der physikalische Effekt bereits seit mehr als 25 Jahren bekannt ist. Erst die Fortschritte in der Schichtabscheidung ermöglichen also eine Forschung, deren Ziel die Anwendung ist. Im Folgenden beschreiben wir einige wesentliche Gesichtspunkte, die im Design der GMR- und TMR-Schichtsysteme berücksichtigt werden müssen, um reproduzierbare und wohl definierte Bauelementkennlinien einzustellen. Abbildung 5 zeigt verschiedene typische Kennlinien. Sie entstehen, wenn man die Magnetisierungsrichtung der weichmagnetischen Schicht in unterschiedlicher Weise von der parallelen und der antiparallelen Anordnung überführt. Die große Variabilität der Kennlinien machen die SpinValve-Strukturen für die Anwendung so interessant: • Fall 1: Schaltet man das äußere Magnetfeld antiparallel zur ursprünglichen Magnetisierungsrichtung, dann beobachtet man als Antwort die typische Hysterese von ferromagnetischen Werkstoffen. Das Umschalten vom alten in den neuen Zustand passiert, wenn das Magnetfeld die Größe des Koerzitivfelds erreicht (Abbildung 5 links oben). Diese Kennlinie ist für MRAMs, Logikbausteine oder Magnetokoppler zur galvanischen getrennten Signalübertragung interessant. ABB. 4 ABB. 5 | T M R- E F F E K T F E R RO M AG N E T I S M U S U N D E L E K T RO N E N Magnetismus entsteht generell durch nicht kompensierte magnetische Momente in den einzelnen Atomen. Diese Momente setzen sich zusammen aus dem Eigendrehimpuls der Elektronen (dem Spin) und ihrem Bahndrehimpuls. Wenn sich diese Beiträge nicht kompensieren, hat das Atom nach außen hin ein magnetisches Moment. Bei bestimmten Atomabständen richten sich diese einzelnen Momente durch die Austauschwechselwirkung parallel aus. Dann zeigt der Festkörper auch ohne ein externes Feld eine spontane Magnetisierung – eine ferromagnetische Ordnung. | In ferromagnetischen Materialien hängen die energetischen Zustände der Elektronen von ihrem Spin ab. Der Spin kann zwei Zustände annehmen, die als „up“ und „down“ bezeichnet werden. Die Energiebänder beider Zustände sind gegeneinander verschoben, und zwar um den doppelten Betrag der Austauschenergie (in Abbildung 4 angedeutet). Als Folge unterscheidet sich nicht nur die Zahl der Spin-up- und Spin-down-Elektronen, sondern auch die Zahl der besetzbaren Zustände an der Fermi-Kante. Das ist für den TMREffekt von entscheidender Bedeutung. Auslegung magnetoelektronischer Schichtsysteme | T Y PI S C H E K E N N L I N I E N Nr. 5 33. Jahrgang 2002 | | Physik in unserer Zeit | 213 ABB. 6 | Optimierte Sandwiches Bisher haben wir eine Spin-Valve-Struktur nur aus drei Schichten aufgebaut. Ein Beispiel für ein solch einfaches System ist eine Abfolge aus CoFe/Cu/NiFe-Schichten. NiFe (Permalloy) ist magnetisch weich. Das magnetisch harte CoFe kann dagegen nur mit Koerzitivfeldern ummagnetisiert werden, die etwa zehnfach über dem des NiFe liegen. 214 | Physik in unserer Zeit | 33. Jahrgang 2002 Nr. 5 | | MAGNETOSTATISCHE WECHSELWIRKUNGEN Magnetostatische Wechselwirkungen in einem Spin-ValveSystem und ihr Effekt auf die Hysteresekurve der weichmagnetischen Schicht. Magnetostatische Kopplung (oben): Die Dipol-Dipol-Wechselwirkung zwischen beiden magnetischen Schichten treibt diese in die antiparallele Orientierung (Pfeile links) und die Hysteresekurve verschiebt sich zu hohem Widerstand bei H = 0. Néel-Kopplung (unten): Die Wechselwirkungen an der rauen Oberfläche stärken die parallele Magnetisierung. Die Hysterese verschiebt sich so, dass bei H = 0 ein niedriger Widerstand herrscht. In der Praxis wird eine noch höhere Stabilität der hartmagnetischen Referenzschicht verlangt, da schon geringe Änderungen in der Magnetisierungsstruktur Verschiebungen im TMR- oder GMR-Signal hervorrufen können. In Festkörperspeichern werden zum Beispiel über die Lebenszeit bis zu 1015 Schreib- und Lesevorgänge erreicht. Eine so hohe Zahl an Schaltzyklen kann die hartmagnetische Schicht ermüden. Sie verliert dann mit zunehmender Zyklenzahl ihren homogenen Magnetisierungszustand. Um die Magnetisierung der Referenzschicht gegen solche Ermüdungserscheinungen zu stabilisieren, wurden die so genannten Exchange-Bias-Systeme entwickelt (Abbildung 7). Bei ihnen wird die hartmagnetische Schicht in einem Magnetfeld auf eine antiferromagnetische Schicht (etwa IrMn) aufgebracht. An der Grenzfläche kommt es dann zu einer sehr starken Kopplung zwischen den Spins der benachbarten Atomlagen, die phänomenologisch als zusätzliches ABB. 8 | E X C H A N G E- B I A S - K E N N L I N I E N 40 40 30 30 20 TMR / % Fall 2: Wird das äußere Magnetfeld senkrecht zur Magnetisierung der weichen Schicht geschaltet, dann ist die Kennlinie linear (Abbildung 5 Mitte). Diese TMR- oder GMR-Kennlinie ist bei Positionssensoren erwünscht, weil die lineare Kennlinie die absolute Positionsbestimmung einer externen Magnetfeldquelle (dies kann ein Dauermagnet sein) erlaubt. • Fall 3: Wird das Magnetfeld kontinuierlich zwischen paralleler und antiparalleler Magnetisierungsrichtung gedreht, dann ändert sich der relative Widerstand mit dem Sinus des Drehwinkels. Auf diesem Prinzip basieren die einfachsten Drehwinkelsensoren. Eine bedeutende Rolle spielen magnetische Streufelder, die von jeder einzelnen Schicht ausgehen. Sie führen zu Kopplungen zwischen den Schichten. Als Folge verhält sich die weichmagnetische Schicht anders als in den in Abbildung 5 gezeigten Idealfällen. Die Pole der magnetisch harten RefeABB. 7 E X C H A N G E- B I A S - PR I N Z I P renzschicht emittieren ein Streufeld, das die weichmagnetische Schicht in eine antiparallele Lage zu orientieren versucht: Diese Dipol-Dipol-Wechselwirkung verhält sich wie die Kraft zwischen zwei Dauermagneten, welche die beiden so dreht, dass die Nord- und Südpole einander möglichst nahe sind. Die Wechselwirkung verBeispiel für ein schiebt in der elektrischen Widerstandsmessung die HyTMR-Spin-Valve, das nach dem sterese der weichmagnetischen Schicht (Abbildung 6 oben). Exchange-BiasWegen dieses Effekts wäre bei fehlendem äußeren Feld nur Prinzip konder hochohmige Zustand stabil. In einem derartigen Fall struiert ist. ließe sich zum Beispiel eine binäre Information in einer MRAM-Zelle schwerlich speichern. Glücklicherweise treten in realen Spin-Valve-Systemen stets Schichtrauigkeiten auf: Wie auf einer Orangenschale liegen auf der Oberfläche kleine Erhebungen und Vertiefungen nebeneinander. In ihnen richten sich die Magnetisierungen parallel zur Referenzschicht aus (Abbildung 6 unten links). Der Effekt wirkt mittels magnetischer Streufelder von der Grenzschicht in die gesamte weichmagnetische Schicht hinein und polt ihre Magnetisierung in die parallele Ausrichtung. Diese nach Louis Néel benannte Kopplung wirkt also der vorher beschriebenen Dipol-Dipol-Wechselwirkung entgegen. Die effektive Verschiebung der Kennlinie eines Spin-Valve-Systems ist damit stets das Ergebnis einer Überlagerung beider Kopplungsphänomene. TMR / % • Hex 10 0 -50 20 HN 10 0 50 100 150 -1 Magnetisches Feld/kAm 200 0 -2 0 2 4 6 -1 Magnetisches Feld/kAm Major Loop (links) und Minor Loop (rechts) eines ExchangeBias-TMR-Systems. Als Antiferromagnet wurde hier IrMn gewählt. 8 R I E S E N M A G N E T W I D E R S TA N D ABB. 9 | | M AG N E TO E L E K T RO N I K ANWENDUNGEN Beispiele für Anwendungen von GMR-Sensoren in der Winkelmessung, der Drehzahlmessung oder Linearpositionierung. Links: absolute Winkelmessung, Mitte: inkrementelle Winkelmessung, rechts: lineare Positionsmessung. magnetisches Feld Hex beschrieben wird. Hex macht die Referenzschicht gegenüber Ermüdungserscheinungen stabiler. Abbildung 8 zeigt die Abhängigkeit des Tunnelwiderstandes von einem externen Magnetfeld, das parallel oder antiparallel zur Vorzugsrichtung der Referenzschicht orientiert wird. Im Nullfeld befindet sich das TMR-Element im Zustand des minimalen Widerstands. Wird das magnetische Feld erhöht, schaltet zunächst die weichmagnetische Schicht („Minor-Loop“). Bei 4 kAm–1 ist deren Magnetisierung antiparallel zur Referenz orientiert und das TMRElement befindet sich somit im hohen Widerstandswert. Bei der Major-Loop-Messung wird das Feld weiter erhöht und oberhalb von 50 kAm–1 wird auch die Referenzmagnetisierung instabil. Bei 100 kAm–1 sind die beiden Magnetisierungen wieder parallel zueinander orientiert. Reduziert man das magnetische Feld wieder bis zu negativen Werten, dann schaltet zunächst im Bereich um 40 kAm–1 wegen der Kopplung zum IrMn die Referenzelektrode. Darunter schaltet dann die Magnetisierung der weichmagnetischen Schicht. Das Beispiel verdeutlicht die Verschiebung der Hysteresekurven beider magnetischer Schichten durch die Néel-Kopplung HN beziehungsweise die Exchange-Bias-Kopplung Hex. Es gibt noch viel mehr Kombinationen von Materialien, als wir hier beschreiben können. Welches Schichtsystem letztendlich für eine bestimmte Anwendung gewählt wird, hängt von deren Anforderungen ab. Anwendungen von GMR-Systemen Die geschilderte Reaktion der Spin-Valve-Strukturen auf ein äußeres Magnetfeld macht sie im Prinzip also zu Magnetfeldsensoren. Deshalb heißt die weichmagnetische Schicht auch „Sensorschicht“. Spin-Valve-Sensoren sind umso empfindlicher, je höher der magnetoresistive Effekt ist und je leichter sich die Sensorschicht ummagnetisieren lässt. Die Hauptanwendung finden solche Sensoren als Leseköpfe in Festplattenspeichern, die digitale Information magnetisch speichern. Zum Lesen schwebt der Lesekopf im Abstand von wenigen Nanometern über der rotierenden Festplatte und detektiert die Streufelder der magnetischen Bits. Solche GMR-Leseköpfe lösen seit 1998 die älteren AMR-Köpfe in Festplattensystemen ab. Ihre höhere Empfindlichkeit und ihre geringe Größe ermöglichen das Auslesen von sehr viel kleineren und dichter zusammen liegenden Bitmustern, was allerdings aufwändige Fehlerkorrekturcodes erfordert. Magnetfeldsensoren werden auch für verschiedene Aufgaben der Positionsmessung eingesetzt, etwa in der Automobiltechnik. Dort lässt die steigende Zahl von Sicherheits-, Komfort- und Fahrzeug-Managementsystemen den Bedarf an geeigneten Sensoren wachsen. Zum Beispiel müssen die Lenkraddrehung, die Stellung des Gas- oder Bremspedals, der Drosselklappe oder einfach nur die SitzpositiABB. 10 M R A M - DAT E N S PE I C H E R on erfasst werden. Abbildung 9 zeigt, wie GMR-Sensoren in solchen Anwendungen kontaktlos einen Winkel, eine Drehzahl oder eine Linearbewegung messen könnten: Immer sitzt ein so genannter Gebermagnet auf dem sich bewegenden Teil. Seine Bewegung induziert ein Streufeld am Ort des Sensors, das sich zeitlich ändert. AufSchematische grund der hohen Empfindlichkeit können große Luftspalte Darstellung eines MRAM-Zellen(also Abstände zwischen Magnet und Sensor) realisiert werfelds: In zwei den, wodurch sich der Aufbau der Sensorsysteme verTMR-Speichereinfacht. Dies ist ein wichtiger Vorteil gegenüber den elementen sind bisher benutzten Hall-Sensoren. die Magnetisie- | Anwendungen von TMR-Systemen Die Forscher in der Industrie fasziniert das Konzept, TMRStrukturen zur Datenspeicherung einzusetzen. So entwickelt sich das noch junge Gebiet der „Magnetoelektronik“. Das Konzept nutzt die Hysterese in der Kennlinie aus und kodiert die Information binär, indem es die Zelle entweder in den hoch- oder niederohmigen Zustand schaltet. Abbildung 10 zeigt schematisch, wie ein solcher Speicherbaustein aussehen könnte. Er hat wie konventionelle Speicherchips zwei Leiterbahnebenen: die so genannten Bitleitungen (oben) und die Wortleitungen (unten). Beide kreuzen sich und ergeben so eine Matrixstruktur, an deren einzelnen Kreuzungspunkten die TMR-Speicherzellen sitzen. Beim Schreiben der Information fließt zugleich je ein Puls elektrischen Stroms durch die Wort- und die Bitleitung. Die beiden Pulse überlagern sich an derjenigen TMR-Speicherzelle, die am Kreuzungspunkt beider Leitungen liegt. Dort addieren sie sich zu einem Magnetfeld auf, das zum Schalten der weichmagnetischen Schicht ausreicht. Alle anderen TMR-Zellen entlang der beiden aktivierten Stromleitungen sehen dagegen nur ein magnetisches Feld, das um den FakNr. 5 33. Jahrgang 2002 | | rungsrichtungen für hochohmig (digitale Eins) und niederohmig (digitale Null) mit Pfeilen eingezeichnet. Physik in unserer Zeit | 215 tor √2 geringer ist: Sie schalten deshalb nicht um. Das Auslesen der Information geschieht über die Bewertung des Zellwiderstandes. Nach diesem Prinzip ließe sich ein monolithischer, nichtflüchtiger Speicher realisieren. Er könnte anders als die bisher notwendigen Festplatten mit hoher Speicherdichte und kurzer Zugriffszeit bei geringem Leistungsverbrauch aufwarten. Digitale Audio- und Videogeräte und portable Computer würden so längere Betriebszeiten erreichen oder mit kleineren und leichteren Akkus auskommen. Außerdem müsste ein PC dann nicht mehr zeitaufwändig gebootet werden. Bei einem Systemabsturz würden auch keine Daten mehr verloren gehen, weil der flüchtige Arbeitsspeicher entfallen würde. An der Verwirklichung dieser Vision wird zurzeit weltweit mit großer Intensität gearbeitet, zum Beispiel von Motorola, IBM und Infineon. Erste Muster sind für 2003/2004 angekündigt. keiten: der Riesenmagnetwiderstand (GMR) und der Tunnelmagnetwiderstand (TMR). In beiden Fällen schaltet das Magnetfeld die Magnetisierung einer weichmagnetischen Sensorschicht relativ zu der einer hartmagnetischen Referenzschicht um. Es ändert so den elektrischen Widerstand des Systems. GMR-Systeme variieren ihren Magnetwiderstand um bis zu 20 % , TMR-Systeme bis zu 50 %. Das liegt gut eine Größenordnung über den älteren, einschichtigen PermalloySystemen. GMR-Systeme sind bereits in Leseköpfen von Festplatten etabliert. Beide Effekte könnten Speicherchips und Sensortechnik revolutionieren. Stichworte Riesenmagnetwiderstand, Giant Magnetic Resistance, GMR, Tunnelmagnetwiderstand,Tunnel Magnetoresistance,TMR, Magnetoelektronik, Spin-Ventil, Spin Valve, Sensortechnik, Speicherchip Biosensoren und Logikchips Aktuell zum Thema Giant MagnetoResistance Devices. E. Hirota, H. Sakakima, K. Inomata, 177 S., 167 Abb., SpringerVerlag, Heidelberg 2002. geb., 64,95 f. 3-540-41819-9 Mit diesen Beispielen ist die Vielzahl möglicher Anwendungen noch nicht erschöpft. Magnetoresistive Strukturen können so ausgelegt werden, dass sie sehr empfindlich auf mechanische Spannungen reagieren. Sie können als Magnetokoppler auch zur potentialfreien Signalübertragung eingesetzt werden. Sie sind dort im Gegensatz zu Optokopplern bis zu deutlich höheren Frequenzen nutzbar. Als Biosensoren würden sie gestatten, auf DNA-Chips die Konzentration spezifischer Proteine elektrisch und nicht wie derzeit üblich über zeitaufwändige optische Verfahren auszulesen. Dazu müssen die Proteinstränge mit magnetischen Markern dekoriert werden, auf deren Magnetfeld die empfindlichen Sensorelemente ansprechen. Ein neues, ebenfalls sehr interessantes Anwendungsfeld sind rekonfigurierbare Logikchips. Ihre Funktion basiert darauf, dass TMR-Elemente zu Gattern verknüpft werden. Diese Gatter können durch Einstellen der Magnetisierungsrichtung der magnetischen Schichten etwa als AND-, OR-, NOR- oder NAND-Gatter programmiert werden. Damit könnte eine komplexe Logikschaltung für eine bestimmte Anwendung oder Rechenoperation schnell und beliebig oft umprogrammiert werden. Ein Chip könnte so je nach Bedarf als Graphikprozessor arbeiten oder zum Soundchip mutieren: Die Hardware müsste nicht ausgetauscht, sondern lediglich vor dem Abspielen von Musikstücken neu programmiert werden. Solch universellen Logikbausteine würden eine problematische Lücke schließen: Heutige Mikroprozessoren, die alles können, sind langsam – die viel schnelleren ASICs (Application Specific Integrated Circuit) können dagegen leider nur für eine spezielle Aufgabe maßgeschneidert werden. Zusammenfassung Magnetoresistive Bauelemente verändern in einem äußeren Magnetfeld ihren elektrischen Widerstand. Zwei Effekte ermöglichen in solchen Dünnschicht-Sandwiches sehr hohe Widerstandsänderungen und damit große Empfindlich216 | Physik in unserer Zeit | 33. Jahrgang 2002 Nr. 5 | Literatur [1] [2] [3] [4] M. N. Baibich et al., Phys. Rev. Lett. 1988, 61, 2472. G. Binasch et al., Phys. Rev. B 1989, 39, 4828. S. Parkin et al., Appl. Phys. Lett. 1991, 58, 2710. M. Julliére, Phys. Lett. 1975, 54 A (3), 225. Übersichtsartikel: G. A. Prinz, J. Magn. Magn. Mater. 1999, 200, 57. J. S. Moodera, G. Mathon, J. Magn. Magn. Mater. 1999, 200, 248. J. Wecker et al., Mater. Sci. For. 1998, 287-288 , 159. R. Allenspach , Physik in unserer Zeit 1996, 27, 118. Physics Today 1995 , 48 (4) (Themenheft). Die Autoren Von links nach rechts: Joachim Wecker studierte in Göttingen Physik. Promotion 1985. Seitdem arbeitet er bei Siemens Corporate Technology in Erlangen und ist zurzeit als Projektleiter verantwortlich für die Entwicklung magnetoelektronischer Bauelemente. Ralf Richter studierte in Würzburg und Buffalo (New York) Physik. Seit Mitte 1999 beschäftigt er sich in seiner Doktorarbeit in Erlangen mit rekonfigurierbaren Logikbausteinen, die auf TMR-Elementen basieren. Ralf Kinder studierte in Regensburg Physik. Seit 1999 arbeitet er im Rahmen seiner Doktorarbeit in Erlangen an Fragen des spinabhängigen Transportes in TMR-Strukturen. Anschrift: Siemens AG, Corporate Technology, CT MM 1, Postfach 3220, D-91050 Erlangen. [email protected]