Elektrodynamik
Werbung

.
Elektrodynamik
Skriptum zur Vorlesung
Prof. Dr. K. Becker
TU-Dresden
2
INHALTSVERZEICHNIS
Inhaltsverzeichnis
1 Mathematische Hilfsmittel
1.1 Die Diracsche δ-Funktion . . . . . . . . . . . . . . . .
1.2 Grundbegriffe der Vektoranalysis . . . . . . . . . . .
1.2.1 Felder . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Der Gradient einer skalaren Funktion φ(~r) . .
1.2.3 Flächenelement und Flächenintegrale . . . . .
1.2.4 Der Fluß eines Vektorfeldes durch eine Fläche
1.2.5 Die Divergenz eines Vektorfeldes . . . . . . . .
1.2.6 Gaußscher Integralsatz . . . . . . . . . . . . .
1.2.7 Der Laplace-Operator . . . . . . . . . . . . .
1.2.8 Die Greenschen Sätze . . . . . . . . . . . . . .
1.2.9 Linienintegrale, Zirkulation . . . . . . . . . .
1.2.10 Die Rotation eines Vektorfeldes . . . . . . . .
1.2.11 Der Satz von Stokes . . . . . . . . . . . . . .
1.2.12 Wichtige Eigenschaften . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Die
2.1
2.2
2.3
2.4
2.5
Grundgleichungen der Elektrodynamik
Ladungsdichte und Stromdichte . . . . . . . . . . . . . .
Erhaltung der elektrischen Ladung . . . . . . . . . . . .
~ und B
~ . . . . . . . . . . . . . . . . . .
Definition von E
Die Maxwellschen Gleichungen im Vakuum . . . . . . . .
Die Maxwellschen Gleichungen in integraler Form . . . .
2.5.1 Das Faradaysche Induktionsgesetz . . . . . . . . .
2.5.2 Das Durchflutungsgesetz von Oersted und Amper
2.5.3 Das Gaußsche Durchflutungsgesetz . . . . . . . .
2.5.4 Die Nichtexistenz magnetischer Ladungen . . . .
2.5.5 Übersicht . . . . . . . . . . . . . . . . . . . . . .
2.6 Die Energiebilanz des elektromagnetischen Feldes . . . .
2.7 Der Impulssatz des elektromagnetischen Feldes . . . . . .
2.8 Die Drehimpulsbilanz des elektromagnetischen Feldes . .
3 Die
3.1
3.2
3.3
3.4
3.5
elektromagnetischen Potentiale
Definition und Differentialgleichungen . . . .
Eichtransformationen . . . . . . . . . . . . .
Die Lorentz-Eichung . . . . . . . . . . . . .
Die Coulomb-Eichung . . . . . . . . . . . . .
Die Lagrange-Funktion für geladene Teilchen
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
7
7
7
9
13
15
17
21
21
22
25
27
31
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
33
33
34
37
39
40
40
44
45
45
46
46
48
52
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
54
54
57
58
59
60
3
Einleitung
In der Elektrodynamik werden die Gesetzmäßigkeiten der räumlichen und
zeitlichen Veränderungen elektromagnetischer Phänomene untersucht. In Analogie zur klassischen Mechanik stützt sich das Gebäude der Elektrodynamik
auf einige wenige Grundaxiome, also Grunderfahrungssätze und Basisdefinitionen. Diese Grundaxiome sind die Maxwellschen Gleichungen. Sie sind
für die Elektrodynamik das, was wir in der klassischen Mechanik die Newtonschen Axiome nennen.
Die Mathematik der Elektrodynamik ist anspruchsvoller als die der klassischen oder theoretischen Mechanik. Deshalb sind im folgendem Kapitel einige
der wichtigsten mathematischen Hilfsmittel der Elektrodynamik aufgeführt.
1
1.1
Mathematische Hilfsmittel
Die Diracsche δ-Funktion
Aus der klassischen Mechanik kennen wir schon den Begriff der Massendichte
ρ(~r). Integration über diese Dichtefunktion hat uns die Gesamtmasse geliefert:
M=
Z
V
d3 r ρ(~r) .
Wir möchten jetzt eine Funktion konstruieren, die die Dichteverteilung einer
Punktmasse oder Punktladung am Ort ~r = ~r0 wiedergeben kann. Sie muß
Schwieriges leisten. Eine solche Funktion müßte überall den Wert Null annehmen und in ~r0 plötzlich unendlich groß sein. Denn wir fordern, daß bei
der Integration über ein Raumgebiet um ~r0 ein endlicher Wert herauskommt.
Eine Funktion, die derartiges kann, ist die Diracsche δ-Funktion, oder auch
kurz δ-Funktion genannt. Sie ist definiert durch ihre Eigenschaften:
R
V
d3 r δ(~r − ~r0 ) =
δ(~r − ~r0 )
=
(
0
1
0
falls
sonst
für alle
~r0 ∈ V
~r 6= ~r0
Die δ-Funktion ist somit keine Funktion im üblichen mathematisch-analytischen
Sinne. D.h. sie ist nicht definiert, indem wir jedem Argument eindeutig einen
4
1 MATHEMATISCHE HILFSMITTEL
Funktionswert zuordnen. Funktionen wie die δ-Funktion, die nur über ihre
Eigenschaften, d.h. nur über ihre Wirkungen definiert sind, heißen Distributionen. Ihre Mathematik ist die Distributionentheorie.
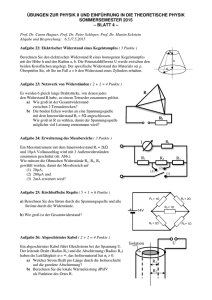
Wir wollen nun versuchen, die δ-Distribution durch eine einfachere Funktion
zu simulieren. Eine Möglichkeit bietet dazu die Lorentz-Kurve. In einer
Dimension lautet sie:
y(x, η) =
1
η
2
π η + (x − x0 )2
f (x)
6
η>0 .
1
πη
-
2η
-
x
x0
Die Höhe der Lorentz-Kurve bei x = x0 ist 1/(ηπ). Ihre Halbwertsbreite
ist 2η und die Fläche unter der Lorentz-Kurve ergibt sich zu:
Z
b
a
!
η
b − x0
1
a − x0
1 Zb
arctan
=
− arctan
y(x, η) dx =
π a η 2 + (x − x0 )2
π
η
η
Jetzt vollziehen wir den Grenzübergang η → 0. Das Argument im arctan
wird dann ±∞ und der arctan liefert uns ein ± π2 . Je nach Lage von x0
bezüglich der Integrationsgrenzen erhalten wir also:
lim
η→0
Z
b
a
y(x, η) dx =
(
1
0
für a < x0 < b
sonst
.
Wichtig ist hier vor allem, die Reihenfolge von Integration und Grenzübergang zu beachten. Es muß erst integriert werden, dann kann der Grenzübergang η → 0 gemacht werden. Zusammenfassend sehen wir dass die Funktion
y(x, η) im Grenzfall η → 0 die Eigenschaften einer δ-Funktion besitzt
δ(x − x0 ) = lim
η→0
1
η
2
π η + (x − x0 )2
.
.
1.1 Die Diracsche δ-Funktion
5
Die δ-Funktion läßt sich wie angedeutet auch auf andere Arten durch Grenzprozesse darstellen. Wichtig ist einzig, daß ihre Definitionsgleichungen erfüllt
werden.
Das dreidimensionale δ-Funktion ist in kartesischen Koordinaten definiert
durch:
δ(~r − ~r0 ) = δ(x − x0 ) δ(y − y0 ) δ(z − z0 ) .
Mit Hilfe der Definitionsgleichungen lassen sich nun analytische Eigenschaften der δ-Distribution herleiten:
1. Sei f (x) stetig in einer Umgebung von x = x0 . Dann gilt:
Z
b
a
f (x) δ(x − x0 ) =
(
f (x0 )
0
falls a < x0 < b
sonst
.
Dies ist die wohl wichtigste Eigenschaft der δ-Funktion. Offenbar filtert
der starke Peak der δ-Funktion bei Integration den Funktionswert von
f (x) bei x0 heraus.
2.
δ(λx) =
1
δ(x)
|λ|
Insbesondere muß also gelten δ(−x) = δ(x).
3. Weiterhin ist schnell gezeigt
g(x) δ(x) = g(0) δ(x) .
Es folgt sofort speziell
x δ(x) = 0 δ(x) = 0 .
4. Wir werden jetzt die δ-Funktion ableiten. Natürlich funktioniert das
nicht im üblichen Sinne. Vielmehr müssen wir von den Eigenschaften
der δ-Funktion auf Eigenschaften ihrer Ableitung schließen. Es liegt also nahe, das Integral der δ-Funktion auszuwerten. Sei a < x0 < b, so
6
1 MATHEMATISCHE HILFSMITTEL
gilt:
Z
b
a
δ ′ (x − x0 ) f (x) dx
=
|{z}
partielle
Integration
f (x) δ(x − x0 ) |ba −
Z
b
a
δ(x − x0 ) f ′ (x) dx = −f ′ (x0 ) .
Damit können wir auch schreiben:
f (x) δ ′ (x − x0 ) = −f ′ (x0 ) δ(x − x0 ) .
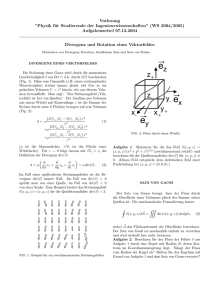
5. Betrachten wir eine weitere Distribition, die sogenannte Stufenfunktion, auch Heaviside-Funktion oder Einschaltfunktion genannt:
Θ(x − x0 ) =
(
1
0
falls x > x0
sonst
.
f (x) 6
θ(x)
1
-
x
0
wobei in der Abb. x0 = 0 gewählt ist. Wir machen uns sofort klar, daß
folgende beiden Eigenschaften gelten.
Z
b
a
d
Θ(x − x0 )
dx
!
dx = Θ(x − x0 )
d
Θ(x − x0 ) = 0
dx
|ba =
(
1
0
für alle x 6= x0
falls a < x0 < b
sonst
.
Dies sind aber exakt die Eigenschaften der δ-Funktion. Die Stufenfunktion Θ und die δ-Funktion sind somit durch folgende Relation miteinander verknüpft:
d
Θ(x − x0 ) = δ(x − x0 ) .
dx
7
1.2 Grundbegriffe der Vektoranalysis
1.2
1.2.1
Grundbegriffe der Vektoranalysis
Felder
In der Elektrodynamik erfolgt die Beschreibung elektrischer und magnetischer Phänomene durch Felder, die wir uns durch elektrische Ladungen und
Ströme erzeugt denken können. So kennen wir zum Beispiel schon das Gesetz, welches die Kraft auf eine elektrische Ladung q beschreibt. Es verknüpft
das elektrische Feld und das Kraftfeld:
~
K
|{z}
=
Kraft auf
die Ladung q
q
~
E
|{z}
.
elektrisches Feld,
hervorgerufen etwa durch andere Ladungen
Wir definieren:
Ein Feld ist eine Funktion, die eine physikalische Größe
an allen Punkten im Raum beschreibt
und unterscheiden:
1. Skalare Felder: Ein skalares Feld weist jedem Punkt im Raum eine Zahl
zu, es ist ein ortsabhängiger Skalar.
Beispiele: Druck, Temperatur, elektrisches Potential, Massendichten,
Energiedichten, Ladungsdichten, ...
2. Vektorfelder: Ein Vektorfeld weist jedem Punkt im Raum einen bestimmten Vektor zu, es ist ein ortsabhängiger Vektor.
Beispiele: Windgeschwindigkeit, Gravitationsfeld, elektrisches Feld, ...
Eingeführte Felder sollen sich nur auf einer makroskopischen Längenskala im
Ortsraum ändern.
1.2.2
Der Gradient einer skalaren Funktion φ(~r)
Wir betrachten ein skalares Feld φ(~r) und interessieren uns für seinen Zuwachs dφ in Richtung d~r. Der Ansatz
dφ = φ(~r + d~r) − φ(~r) =: grad (φ(~r)) · d~r
8
1 MATHEMATISCHE HILFSMITTEL
definiert uns eine Vektorfunktion grad, die uns skalar mit d~r multipliziert
den Zuwachs von φ(~r) liefert.
z
6
/
φ(~r)
d~r-
7
φ(~r + d~r)
-
y
x
Damit ist grad wohldefiniert. Jetzt muß nur noch etwas Mathematik investiert werden, um die explizite Darstellung von grad in kartesischen Koordinaten zu erhalten:
grad φ(~r) =
∂φ
∂φ
∂φ
~ex +
~ey +
~ez
∂x
∂y
∂z
.
~ eingeführt:
In der Literatur wird auch häufig der Nabla- Operator ∇
~ := ∂ ~ex + ∂ ~ey + ∂ ~ez
∇
∂x
∂y
∂z
.
so daß auch gilt
~ r ).
grad φ(~r) = ∇φ(~
Wir fassen noch einmal zusammen:
φ(~r + d~r) = φ(~r) + dφ = φ(~r) + grad φ · d~r
9
1.2 Grundbegriffe der Vektoranalysis
1.2.3
Flächenelement und Flächenintegrale
Der Ortsvektor aller Punkte einer Fläche S im Raum wird durch zwei Parameter (Koordinaten) festgelegt. Die dritte Ortskoordinate ist durch die
Kenntnis der beiden anderen Koordinaten eindeutig bestimmt:
S = {~r(u, v)}
u, v ∈ Wertebereich
.
Beispiele:
1. Ein Punkt in der x-y-Ebene wird durch die beiden Koordinaten x und
y festgelegt. Die z-Koordinate ist fest gleich 0.
2. Die Punkte auf der Oberfläche einer Kugel (Radius R fest) wird in
Kugelkoordinaten durch die Angabe der Winkel-Koordinaten φ und θ
(Höhe und Breite) beschrieben:
x = R sin θ cos φ
y = R sin θ sin φ
z = R cos θ
z
.
6
θ
r
Q
%
%
Q
Q
%
φ
QQ
s%
-
y
x
Gehen wir wieder zurück zur obigen Parameter-Darstellung S = {~r(u, v)}
einer Fläche. Ziel ist es, die Fläche in infinitesimale Flächenstücke zu zerlegen.
Dazu wird zuerst der Wert von u festgehalten und wir variieren v zu v +
dv. Den dabei entstehenden infinitesimalen Richtungsvektor nennen wir d~a.
Jetzt halten wir v fest und verändern u zu u + du. Hierbei erzeugen wir
den Richtungsvektor d~b. Natürlich erhält man, wenn man die Prozedur in
umgekehrter Reihenfolge durchführt.
10
1 MATHEMATISCHE HILFSMITTEL
z
6
u + du
u
df~
v
v + dv
d~b 3
d~a^
~r(u, v)
~r(u + du, v + dv)
-
y
x
Als nchstes geben wir jedem Flächenelelment eine Orientierung derart, daß
df~ senkrecht zu dem von d~a und d~b aufgespannten Flächenelement sreht. Bei
einem geschlossenen Oberfläche besteht die Konvention,d aß df~ stats nach
außen gerichtet ist. Weiterhin soll die Länge von df~ gleich dem Flächeninhalt des von d~a und d~b aufgespannten Parallelogrammes sein. Diese beiden
Forderungen implizieren, df~ als Kreuzprodukt der Vektoren d~a und d~b darzustellen ist. Es gilt daher (eventuell bis auf das Vorzeichen):
df~ = d~a × d~b .
Wir haben somit ein Verfahren gefunden, dem Punkt ~r(u, v) ein infinitesimales Flächenstück df~ zuzuordnen. Die gesamte Fläche ist jetzt mit einer
Schar von Flächenelementen überzogen. Mit
∂~
r
∂v
∂~
r
∂u
d~a = ~r(u, v + dv) − ~r(u, v) =
d~b = ~r(u + du, v) − ~r(u, v) =
dv
du
folgt
df~ =
!
∂~r
∂~r
du dv
×
∂u ∂v
.
∂~
r
∂~
r
und ∂v
die Tangentialebene von S auf, während
Anschaulich spannen also ∂u
∂~
r
∂~
r
× ∂v normal zur Ebene gerichtet ist.
∂u
11
1.2 Grundbegriffe der Vektoranalysis
Beispiele: 1. Kugeloberflächen
z
6
>
df~
R dθ
>
θ
R sin θ dφ
~
R
-
φ
R sin θ
y
x
Betrachten wir das Problem in Kugelkoordinaten
x = r sin θ cos φ
y = r sin θ sin φ
z = r cos θ
,
so ist die Oberfläche S einer Kugel mit dem Radius R gegeben durch:
S = {~r = ~r(θ , φ), 0 ≤ θ ≤ π, 0 ≤ φ ≤ 2π, r = R}
.
Es folgt:
∂~
r
∂θ
= R (cos θ cos φ , cos θ sin φ , − sin θ) = R ~eθ
∂~
r
∂φ
= R (− sin θ sin φ , sin θ cos φ , 0)
= R sin θ ~eφ .
Das Flächenelement der Kugeloberfläche ist also wegen ~eθ × ~eφ = ~er radial
nach außen gerichtet und hat den Inhalt R2 sin θ dθ dφ.
2. Zylindermantelfläche:
12
1 MATHEMATISCHE HILFSMITTEL
z
6
P
lPdφ
P
lP
X
X
Z X
X
Z QQ
s
Q
df~ = R dφ dz
-
y
x
In Zylinderkoordinaten
x = ρ cos φ
y = ρ sin φ
z = z
ist die Zylindermantelfläche S bei einem Zylinderradius R parametrisiert
durch:
S = {~r = ~r(φ, z); 0 ≤ φ ≤ 2π; 0 ≤ z ≤ l; ρ = R}
.
Somit gilt:
∂~
r
∂φ
= R (− sin φ , cos φ , 0) = R ~eφ
∂~
r
∂z
= (0, 0, 1)
= ~ez
.
Einsetzen führt mit ~eφ × ~ez = ~eρ auf:
df~ = R dφ dz ~eρ
.
Flächenintegration:
Jetzt sind wir in der Lage, den normalen Integrationsbegriff auf Flächenintegrationen zu erweitern. Dabei wird über die beiden flächenbestimmenden
13
1.2 Grundbegriffe der Vektoranalysis
Parameter nacheinander integriert. Sei eine Funktion ρ auf einer Oberfläche
S gegeben, und wir interessieren uns für den Gesamtwert I, den wir erhalten, wenn wir ρ über die gesamte Oberfläche integrieren, so müssen wir die
folgende Flächenintegration durchführen.
1. Beispiel: x-y-Ebene
I=
Z Z
S
ρ(x, y) dx dy
.
Also ist df =| df~ |= dx dy.
2. Kugeloberfläche
I=
Z Z
S
ρ(θ, φ) R2 sin θ dθ dφ
und wir sehen df = R2 sin θ dθ dφ .
Zu beachten ist, daß bei der Flächenintegration der korrekte Funktionswert
von ρ auf der Oberfläche einzusetzen ist. Ausgerüstet mit diesen Erkenntnissen können wir mit der Flächenintegration von Vektorfeldern beginnen:
1.2.4
Der Fluß eines Vektorfeldes durch eine Fläche
Gegeben sei ein Vektorfeld F~ (~r) mit den Komponenten Fi (~r)
F~ (~r) = (F1 (~r), F2 (~r), F3 (~r)) .
Wir definieren:
Der Fluß dΦ des Vektorfeldes F~ (~r) durch die
infinitesimale Fläche df~ ist gegeben durch:
dΦ = F~ (~r) · df~
D.h. der Fluß dΦ durch das Flächenelement df~ am Ort ~r ist gegeben durch
~ Damit ist dΦ gerade die Komdie Projektion von F~ auf die Richtung von df.
~
~
ponente von F , die parallel zu df (d.h. normal zur Fläche) steht, multipliziert
mit | df~ |.
14
1 MATHEMATISCHE HILFSMITTEL
F~
>
θ
- - df~
~
| F | cos θ
dΦ =| F~ | cos θ | df~ |
Die Flußdefinition läßt sich einfach auf endliche Flächengebiete S erweitern.
Wir führen dazu eine Flächenintegration durch:
Der Fluß Φ des Vektorfeldes F~ (~r) durch die Fläche S ist
gegeben durch:
Φ=
Z Z
S
dΦ =
Z Z
S
F~ (~r) · df~ .
:
-
s
~ (~r)
F
z
>
7
Besonders wichtig sind Oberflächenintegrale über geschlossene Oberflächen.
Solche Integrale geben uns darüber Auskunft, mit welcher Bilanz in einem
von dieser Oberfläche eingeschlossenem Volumen, ein Vektorfeld ein- und
wieder ausfließt. Für die Flächenintegration über geschlossenen Oberflächen
15
1.2 Grundbegriffe der Vektoranalysis
wollen wir ein spezielles Integrationszeichen reservieren und schreiben
Φ=
I
S
F~ (~r) · df~ .
Dabei zeigt S zusmmen mit dem Ring im Integralzeichen die geschlossene
Oberfläche an, so daß auf die doppelten Integralzeichen verzichtet werden
kann.
Beispiele:
1. Fluß eines radialsymmetrischen Feldes durch eine Kugeloberfläche:
Für ein rotationssymmetrisches Zentralfeld F~
F~ (~r) = f (r) ~er
,
folgt mit Hilfe von
df~ = R2 sin φ dφ dθ ~er
für den Gesamtfluß Φ durch die geschlossene Kugeloberfläche S
Φ =
I
S
F~ · df~
= R2 f (R)
Z
π
0
= 2πR2 f (R)
Z
Z
0
2π
0
π
sin θ dθ dφ
sin θ dθ = 4πR2 f (R)
.
2. Fluß durch eine beliebige parametrisierte Fläche:
Z
∂~r
∂~r
Φ = F~ (~r(u, v)) ·
×
∂u ∂v
S
1.2.5
!
du dv
.
Die Divergenz eines Vektorfeldes
Es ist schon angedeutet worden, daß die Flußintegration über geschlossene
Oberflächen die Bilanz des Vektorflusses im eingeschlossenen Volumen liefert.
Ist das Flußintegral Null, bedeutet dies, daß genausoviel aus dem Volumen
heraus wie hereinfließt. Falls Quellen und Senken innerhalb des Volumen vorhanden sind, sind sie im Gleichgewicht. Ist die Bilanz positiv, so muß mehr
aus dem Volumen herausfließen, als hineinfließt. Im betrachteten Volumen
befinden sich folglich mehr Quellen als Senken. Eine negative Bilanz zeigt
16
1 MATHEMATISCHE HILFSMITTEL
einen Senkenüberschuß an.
Im nächsten Schritt wollen wir ein infinitesimal kleines Volumen betrachten.
Führen wir eine Oberflächenintegration über dieses Volumen durch, so erhalten wir Auskunft über die lokale Quellen- und Senkenbilanz. Diese Operation
heißt Bildung der Divergenz eines Vektorfeldes. Später werden wir die exakte
integrale und damit koordinatenfreie Definition der Divergenz kennenlernen.
Zunächst beschäftigen wir uns mit der differentiellen, handlicheren Formulierung der Divergenz in kartesischen Koordinaten. Wir betrachten dazu ein
infinitesimales quaderförmiges Volumenelement dV = dx dy dz, welches von
einem Vektorfeld F~ (~r) durchdrungen wird.
z
6
q a
a q q
y
0
)
dz
x a dx
dy
Der durch die vordere Fläche (Normale in x-Richtung) nach außen gehende
Fluß beträgt
dΦx,vorne =
≈
Z
y+ dy
2
y− dy
2
Z
z+ dz
2
z− dz
2
F (x +
!
1 ∂Fx
Fx +
dx
2 ∂x
dx ′ ′
, y , z ) dy ′dz ′
2
dy dz
,
wobei der Mittelpunkt des Volumens durch die Koordinaten P (x, y, z) bebesitzt.
stimmt ist und die Vorderseite als x-Koordinate x + dx
2
Der durch die hintere, gegenüberliegende Fläche gehende Fluß ist
dΦx,hinten
!
1 ∂Fx
= Fx −
dx (−dy dz) .
2 ∂x
Die Bilanz von beiden Anteilen ist
dΦx = dΦx,vorne + dΦx,hinten =
∂Fx
∂Fx
dx dy dz =
dV
∂x
∂x
.
17
1.2 Grundbegriffe der Vektoranalysis
Und in analoger Weise erhalten wir
dΦy = dΦy,vorne + dΦy,hinten =
∂Fy
∂Fy
dy dx dz =
dV
∂y
∂y
,
dΦz = dΦz,vorne + dΦz,hinten =
∂Fz
∂Fz
dz dx dy =
dV
∂z
∂z
.
Wir fassen zusammen und definieren:
Die Divergenz div eines Vektorfeldes F~ ist durch die
Beziehung
dΦ = divF~ dV
festgelegt. Dabei ist dΦ der infinitesimale Fluß des
Vektorfeldes F~ durch die Fläche, die das infinitesimale
Volumen dV begrenzt.
Als explizite Darstellung von div in kartesischen Koordinaten ergibt sich unmittelbar
divF~ =
∂Fy
∂Fz
∂Fx
~ · F~
+
+
=∇
∂x
∂y
∂z
.
~ aus Abschnitt 1.2.2 verwendet werwobei auch wieder der Nablaoperator ∇
den kann.
1.2.6
Gaußscher Integralsatz
Wir haben gezeigt, daß der aus einem Volumenelement dV herausgehende
Fluß dΦ gleich divF~ dV ist. Wollen wir den Fluß durch ein endliches Volumen V auswerten, so müssen wir den Fluß sämtlicher infinitesimaler Volumenelemente in V aufintegrieren. Wir stellen fest: Legen wir zwei Teilvolumen ∆V1 und ∆V2 aneinander, so hebt sich der Fluß durch die gemeinsame
Berührungsfläche gerade auf, da die beiden Flächennormalen der gemeinsamen Berührungsfläche entgegengesetzt gerichtet sind.
18
1 MATHEMATISCHE HILFSMITTEL
df~1 = −df~2
> F
~
r
~
~
df2 df1
Denken wir uns nun unser Volumen V aus infinitesimalen Teilvolumen ∆V
zusammengesetzt, so wird in die Flußbilanz nur die Oberfläche von V eingehen. Die Flächenelemente im Volumeninneren werden sich immer paarweise
aufheben. Es bleibt nur ein Integral über die Einhüllende des Volumens V .
Dies aber ist die Aussage des Gaußschen Satzes:
Der Gesamtfluß eines Vektorfeldes F (~r) durch die ein
Volumen V einhüllende Oberfläche S(V ) ist gleich dem
Volumenintegral über die Divergenz von F (~r):
Φtotal =
I
S
F~ · df~ =
Z
V
divF~ dV
.
Der Gaußsche Satz verknüpft Volumeneigenschaften eines Vektorfeldes mit
dessen Oberflächeneigenschaften. Hieraus ergibt sich unmittelbar die folgende Integraldarstellung der Divergenz:
divF~ = lim
∆V →0
1 I
F~ · df~ .
∆V S(∆V )
~ einer PunktAnmerkungen: Wir betrachten als Beispiel das elektrische Feld E
ladung q am Ort ~r = 0
~ r ) = q ~er
E(~
r2
(Coulomb-Feld)
und versuchen uns die anschauliche Interpretation von divF~ als Quellendichte
des Vektorfeldes F~ klarzumachen. Wir müssen zwei Fälle unterscheiden:
19
1.2 Grundbegriffe der Vektoranalysis
(i) Das Volumenelement umschließt nicht den Ort der Ladung ~r = 0 :
z
6
∆f~−~er
T
T
∆f~~er
θ
*
~
r
PP
%
PP
PPr sin θ %
PP
q%
P
-
y
x
Unter Verwendung von Kugelkoordinaten erhalten wir ∆V = r 2 sin θ ∆θ ∆φ ∆r.
~ r ) nur eine radiale Komponente besitzt, genügt es, nur die beiDa E(~
den Flächen des Volumenelementes mit Normalenvektoren in ~er - und
(−~er )-Richtung auszuwerten
∆f~~er = (r + ∆r)2 sin θ ∆θ ∆φ ~er
∆f~−~er = r 2 sin θ ∆θ ∆φ (−~er )
~ :
Dann folgt für divE
(
q ~er
q(−~er )
1
· ∆f~~er −
· ∆f~−~er
lim 2
2
∆V →0 r sin θ ∆θ ∆φ ∆r
(r + ∆r)
r2
(
)
sin θ ∆θ ∆φ ∆r
(r + ∆r)2 r 2
= lim q 2
−
∆V →0
r sin θ ∆θ ∆φ ∆r (r + ∆r)2 r 2
= 0
~ =
divE
Somit verschwindet für ~r 6= 0 die Divergenz des Coulomb-Feldes. Das
~
E-Feld
einer Punktladung ist außerhalb dieser Punktladung quellenund senkenfrei.
)
20
1 MATHEMATISCHE HILFSMITTEL
(ii) Das Volumenelement umschließt ~r = 0. Wir erhalten
4π 3
r
3
∆V =
und
df~ = r 2 sin θ dθ dφ ~er
.
Somit ergibt sich
I
1
q 2
r sin θ dθ dφ
4π
3 S(∆V ) r 2
r→0
r
3
Z π
Z 2π
3q
= lim
sin θ dθ
dφ
r→0 4πr 3 0
|
{z 0
}
~ = lim
divE
=4π
3q
= lim 3 → ∞
r→0 r
Die Divergenz bei ~r = 0 wird unendlich groß, d.h. das Coulomb-Feld
einer Punktladung besitzt am Ort der Punktladung eine Singularität.
Das verwundert nicht, immerhin muß ein unendlich kleines Volumen
∆V → 0 eine endliche Ladung q erzeugen. An dieser Stelle hilft uns
das erste Mal die δ-Funktion weiter. Die Singularität bei ~r = 0 ist gerade vom Typ der δ-Funktion. Es gilt
~ = 4π q δ(~r) .
divE
~ = 0 für ~r 6= 0. Außerdem folgt
Beweis: Zunächst folgt unmittelbar divE
aus der Integration über die δ-Funktion
Z
V
~ d3 r = 4π q
divE
Z
V
δ(~r) d3 r = 4π q
.
Das Ergebnis ist korrekt, da die Anwendung des Gaußschen Satzes
für die linke Seite ergibt
Z
V
~ d3 r =
divE
I
S(V )
~ df~ = 4π q
E
.
21
1.2 Grundbegriffe der Vektoranalysis
1.2.7
Der Laplace-Operator
Wir betreachten uns den Gradienten eines skalaren Feldes φ
gradφ =
∂φ
∂φ
∂φ
~
~ex +
~ey +
~ez = ∇φ
.
∂x
∂y
∂z
und interessieren wir uns für die Divergenz des so erzeugten Vektorfeldes
div(gradφ) =
∂2φ ∂2φ ∂2φ
~ · ∇φ
~
+ 2 + 2 =∇
.
∂x2
∂y
∂z
Hier läßt sich ein neuer Differentialoperator einführen, der als LaplaceOperator heißt und mit einem eigenen Symbol △ bezeichnet wird
△=
∂2
∂2
∂2
+
+
∂x2 ∂y 2 ∂z 2
~ · ▽φ
~ = △φ.
so daß auch gilt div(gradφ) = ▽
1.2.8
Die Greenschen Sätze
Sei speziell
F~ =
u
|{z}
skalares
Feld
~
A
|{z}
.
Vektorfeld
Dann folgt für
~ r))
divF~ (~r) = div(u(~r) A(~
∂
∂
∂
=
(uAx ) +
(uAy ) + (uAz )
∂x
∂y
∂z
!
!
∂Ax
∂u
∂u
∂u
∂Ay
∂Az
+ u
= Ax
+ Ay
+ Az
+u
+u
∂x
∂y
∂z
∂x
∂y
∂z
~ · gradu + u divA
~
= A
22
1 MATHEMATISCHE HILFSMITTEL
~ = gradv, so folgt
Wählt man A
divF~ = div(u gradv) = gradv · gradu + u △ v
.
Wir können nun mit Hilfe des Gaußschen Integralsatzes und unter Verwendung des eben Hergeleiteten den ersten Greenschen Satz formulieren:
Erster Greenscher Satz:
Z
V
I
(gradv · gradu + u △ v) dV =
S
u (gradv) · df~
In völlig analoger Weise erhält man, wenn man u mit v vertauscht
Z
V
(gradu · gradv + v △ u) dV =
I
S
~ .
v (gradu · df)
Subtrahieren wir beide Beziehungen voneinander und ordnen um, so folgt als
Zweiter Greenscher Satz:
Z
V
1.2.9
(u △ v − v △ u) dV =
I
S
(u gradv − v gradu) · df~
Linienintegrale, Zirkulation
Das Linienintegral zwischen zwei Punkten A und B ist definiert durch
Z
B
A
F~ · d~r ,
wobei die Integration entlang eines vorgeschriebenen Weges Γ erfolgen soll.
z
6
Γ
A
x
B
-
y
23
1.2 Grundbegriffe der Vektoranalysis
Betrachten wir uns zur Einstimmung eine Kurve Γ, die in der x-y-Ebene
liegt, so vereinfacht sich das Wegintegral zu
IA→B =
Z
B
A
F~ (~r) · d~r =
Z
B
A
(Fx (x, y) dx + Fy (x, y) dy)
.
Hier muß sichergestellt sein, daß nur Werte der Funktion F~ (~r) auf dem Weg
Γ eingehen. Dazu muß die Kurve Γ eindeutig in der folgenden Form gegeben
sein
y = f (x)
bzw.
x = g(y) .
Damit erhalten wir
IA→B =
Z
x1
x0
Fx (x, f (x)) dx +
Z
y1
y0
Fy (g(y), y) dy
wobei Anfangs– und Endpunkt durch A = (x0 , y0) und B = (x1 , y1 ) bestimmt
sind. Häufig ist es zweckmäßig, eine Parametrisierung der Kurve in der Form
y = y(t)
und
x = x(t)
zu verwenden, wobei hier der Parameter t etwa die Zeit bedeuten könnte.
y
x
Beispiel: Sei Fx = − x2 +y
2 und Fy = x2 +y 2 . Gesucht ist das Wegintegral
entlang eines Halbkreises um den Ursprung mit dem Radius a.
y 6
Γ
}
B
A
−a
a
-
x
Durch Probieren oder scharfes Hinsehen ergibt sich als geeignete Parameterdarstellung:
x = a cos t ⇒ dx = −a sin t dt
24
1 MATHEMATISCHE HILFSMITTEL
y = a sin t ⇒ dy = a cos t dt
Damit erhält man
Fx = −
a sin t
a2
und
Fy =
a cos t
a2
.
womit sich das Linienintegral auswerten läßt:
IA→B =
Z
B
(Fx dx + Fy dy)
=
A
Z π
(−
=
Z
0
a cos t
a sin t
(−a) sin t dt +
a
{zt dt})
| cos
2
2
{z
}
a } |
| {z
| a
{z }
dy
dx
Fx
0
= π
π
Fy
sin2 t + cos2 t dt
(unabhängig von a) .
Geschlossenes Wegintegral:
Nun legen wir fest, daß Anfangspunkt und Endpunkt des Integrationsweges
zusammenfallen sollen. Wir definieren dann:
Das Wegintegral eines Vektorfeldes F~ (~r) entlang eines
geschlossenen Weges Γ heißt Zirkulation ZΓ des
Vektorfeldes F~ bezüglich der geschlossenen Linie Γ:
ZΓ =
I
Γ
F~ · d~r .
Der Umlaufsinn der Wegintegration soll bezüglich der Flächennormalen der
von Γ begrenzten Fläche als Rechtsschraube erfolgen.
25
1.2 Grundbegriffe der Vektoranalysis
*
R
q
:
F~
z
:
q
3
-
3
1
s
d~r
1.2.10
~
Γ
:
-
Die Rotation eines Vektorfeldes
Zur Einführung einer Rotation wollen wir zunächst ein infinitesimales Flächenelement in der x-y-Ebene mit seinem Mittelpunkt bei P (x, y, 0) näher betrachten, dessen Flächennormale df~ in z-Richtung weist.
y
6
y + 12 dy
P (x, y, 0)
?
df~
=
-
y − 21 dy
6
-
x − 21 dx
x + 21 dx x
z
Jetzt werten wir die Zirkulation eines Vektorfeldes F~ entlang der Begrenzung
von df~ aus:
dZ =
Z
x+ 21 dx
x− 21 dx
1
1
Fx (x , y − dy) − Fx (x′ , y + dy)
2
2
′
dx′ +
26
1 MATHEMATISCHE HILFSMITTEL
+
=
Z
Z
y+ 21 dy
y− 21 dy
1
1
Fy (x + dx, y ′) − Fy (x − dx, y ′ )
2
2
dy ′
!
x+ 12 dx
1
∂Fx ′ 1
∂Fx ′
(x , y)(− dy) −
(x , y) dy dx′
1
∂y
2
∂y
2
x− 2 dx
!
Z y+ 1 dy
∂Fy
∂Fy
1
2
′ 1
′
(x, y ) dx −
(x, y )(− dx) dy ′
+
1
∂x
2
∂x
2
y− 2 dy
= −
∂Fx
∂Fy
dy dx +
dx dy
∂y
∂x
.
wobei eine Taylor-Entwickelung der Funktionswerte um P (x, y, 0) bis zur
ersten Ordnung verwendet wurde:
1
∂Fx 1
Fx (x, y ± dy) = Fx (x, y) ±
dy
2
∂y 2
und
∂Fy 1
1
dx .
Fy (x ± dx, y) = Fy (x, y) ±
2
∂x 2
Außerdem wurde bei der Integration über x′ bzw. y ′ angenommen, daß sich
∂Fx
y
und ∂F
nicht wesentlich ändern. Für die infinitesimale Zirkulation dZ
∂y ′
∂x′
gilt also
dZ =
∂Fy ∂Fx
−
∂x
∂y
!
dx dy
,
wobei die Flächennormale df~ in z-Richtung orientiert war. Für eine beliebige Orientierung des betrachtenden Flächenelementes df~ läßt sich das gerade
gefundene Ergebnis leicht verallgemeinern. Man findet
dZdf~
"
!
!
∂Fz ∂Fy
∂Fx ∂Fz
=
~ex +
~ey
−
−
∂y
∂z
∂z
∂x
! #
∂Fy ∂Fx
+
~ez · df~ .
−
∂x
∂y
~
Der Vektor in der eckigen Klammer ergibt sich bei näherem Hinsehen als ∇×
F~ . Das motiviert die Einführung der ’Rotation’. In kartesischen Koordinaten
gilt
27
1.2 Grundbegriffe der Vektoranalysis
!
!
∂Fx ∂Fz
∂Fy
∂Fz
~ex +
~ey
−
−
∂y
∂z
∂z
∂x
!
∂Fy
∂Fx
~ez
−
∂x
∂y
rotF~ (~r) =
+
~ × F~ (~r) .
= ∇
wobei die Zirkulation gegeben ist durch
dZdf~ = rotF~ · df~ ,
Als kleine Hilfe kann man sich merken, daß sich die Rotation eines Vektorfeldes mit Hilfe einer dreireihigen Determinante darstellen laäßt:
~ × F~ = det
rotF~ = ∇
1.2.11
~ex
~ey
~ez
∂
∂x
∂
∂y
∂
∂z
Fx Fy Fz
.
Der Satz von Stokes
Bisher haben wir Zirkulationen auf infinitesimalen Flächenstücken behandelt. Wollen wir den Zirkulationsbegriff auf endliche Flächen erweitern, so
müssen wir nur genügend infinitesimale Flächenstücken zusammenlegen, um
eine endliche Fläche zu erhalten.
Γ
? 6? 6
-
X
z
X
O
28
1 MATHEMATISCHE HILFSMITTEL
Integrieren man nun alle infinitesimale Zirkulationen auf, so sieht man, daß
sich im Inneren der Fläche benachbarte Zirkulationen gegenseitig aufheben.
Übrig bleibt nur noch ein Integral über die Umrandung Γ der Fläche, ein
Linienintegral. Das ist gerade der Inhalt des Stokeschen Satzes. E
Satz von Stokes
Z
rotF~ · df~ =
S
I
Γ(S)
F~ · d~r
Auch hier ist es sinnvoll, ähnlich wie bei der Divergenz, eine lokale koordinatenfreie Definition der Rotation anzugeben:
rotF~
Dabei ist mit
rotF~
~
e∆S
1
= lim
∆S→0 ∆S
I
r
F~ · d~r .
die Komponente der Rotation in Richtung der
Flächennormalen von ∆S gemeint. Anschaulich interpretieren wir rotF~ als
Zirkulationsstärke (Zirkulation pro Fläche) oder als Wirbelstärke am Punkt
H
~r. Dabei ist das Linienintegral F~ · d~r eng mit dem Begriff des Wirbels verbunden. Um dies zu veranschaulichen, betrachten wir ein Beispiel:
~
e∆S
Wir möchten die Rotation des obigen Vektorfeldes F~ analysieren, wobei F~
gegeben war durch
F~ (~r) = −
x2
y
x
~ex + 2
~ey
2
+y
x + y2
Als zweckmäßige Koordinaten wählen wir Zylinderkoordinaten:
x = ρ cos φ
y = ρ sin φ
z = z
.
womit sich F~ vereinfacht zu
1
F~ (~r) = (− sin φ ~ey + cos φ ~ex )
{z
}
ρ|
=~
eφ
.
29
1.2 Grundbegriffe der Vektoranalysis
F~ hat also nur eine Komponente in ~eφ -Richtung, deren Intensität mit
nimmt:
1
ρ
ab-
1
F~ = Fφ (ρ) ~eφ = ~eφ
ρ
y
6
]
]
J
]J ]
x
Die Feldlinien bilden konzentrische Kreise. Deshalb vermuten wir bei x =
y = 0 einen Wirbel. Dazu werten wir die Rotation von F~ (~r) aus:
rotF~
~e∆S
= lim
∆S→0
1 I ~
F · d~r
∆S Γ
Wieder müssen wir zwei Fälle unterscheiden:
1. Der Integrationsweg umschließe die z-Achse: Als Fläche nehmen wir
~=
zweckmäßigerweise einen konzentrischen Kreis um die z-Achse mit ∆S
H
πρ2~ez . Leicht nachgerechnet ist F~ · d~r = 2π mit dem Kreisumfang als
Integrationsweg. Wir erhalten
rotF~
z
I
1
F~ · d~r
∆S→0 ∆S Γ
1
2
= lim
2π = lim 2 → ∞
2
ρ→0 πρ
ρ→0 ρ
= rotF~ (ρ = 0, φ , z)
=
lim
z
30
1 MATHEMATISCHE HILFSMITTEL
2. Der Integrationsweg liege außerhalb der z-Achse:
y 6
(ρ + dρ)dφ
/
I
R
D 3
dρ
D
dφ DD
ρ dφ
x
Hier gibt es nur von den Wegstücken in ± φ-Richtung Beiträge zu dem
Linienintegral:
rotF~ (~r)
=
z
=
=
=
=
1
(Fφ (ρ + dρ) (ρ + dρ) dφ − Fφ (ρ) ρ dφ)
ρ dφ dρ
!
∂Fφ (ρ)
1
(Fφ (ρ) +
dρ) (ρ + dρ) dφ − Fφ (ρ) ρ dφ
ρ dφ dρ
∂ρ
!
1
∂Fφ (ρ)
Fφ (ρ) dρ dφ +
ρ dφ dρ
ρ dφ dρ
∂ρ
Fφ (ρ) ∂Fφ (ρ)
+
ρ
∂ρ
!
∂ 1
1 1
=0 .
+
ρ ρ ∂ρ ρ
Zusammengefaßt heißt das:
rotF~ =
(
limρ→0
0
2
~e
ρ2 z
→∞
für ρ → 0
sonst
.
Dies aber sind Forderungen, die nur die δ-Funktion erfüllen kann. Es
gilt
rotF~ (x, y) = 2πδ(x)δ(y)~ez
.
31
1.2 Grundbegriffe der Vektoranalysis
wobei man leicht zeigen kann,
dass bei Integration
über einen kleinen Kreis
H
R
um die z-Achse erfüllt ist S rotF~ (~r) · df~ = Γ(S) F~ (~r) · d~r = 2π. Offensichtlich
besitzt das Feld F~ (~r) einen Wirbel entlang der z-Achse.
1.2.12
Wichtige Eigenschaften
Wir gehen nun noch auf zwei sehr wichtige Zusammenhänge zwischen div,
rot und grad ein.
1. Ein Gradientenfeld ist wirbelfrei: rot(gradφ) = 0 .
Beweis:
rot (grad φ) =
!
∂ ∂φ
∂ ∂φ
~ex + ...
−
∂y ∂z
∂z ∂y
Es entstehen also paarweise gemischte Ableitungen, die sich wegsubtrahieren.
2. Ein Rotationsfeld ist quellenfrei: div (rot F~ ) = 0.
Der beweis kann analog zur obigen Aussage erfolgen. Ein alternativer
Beweis ergibt sich wie folgt:
Wir benutzen dazu den Gaußschen und Stokesschen Satz und betrachten ein Volumen V , das irgendwo durch eine Oberflächenkurve Γ
in zwei Teile geteilt wird.
*
-
,
""
,
Γ
S
w
S
S1
Γ
S2
Mit dem Gaußschen Satz folgt zunächst:
Z
V
div (rot F~ ) dV =
Z
S1
rot F~ · df~ +
Z
S2
rot F~ · df~
32
1 MATHEMATISCHE HILFSMITTEL
Mit dem Satz von Stokes ergibt sich für die beiden Integrale rechts
Z
ZS1
S2
rot F~ · df~ =
I
F~ · d~r
ΓI
rot F~ · df~ = −
Γ
F~ · d~r
so daß die rechte Seite insgesamt verschwindet. Das entgegengesetzte
Vorzeichen der Wegintegrale ergibt sich hierbei aus der
entgegengesetzR
ten Orientierung der beiden Flächenhälften. Da nun V div(rotF~ ) dV =
0 für beliebiges Volumen V gilt, folgt die obige Behauptung.
33
Die Elektrodynamik im Vakuum
2
Die Grundgleichungen der Elektrodynamik
2.1
Ladungsdichte und Stromdichte
Wir beginnen mit der Einführung von einigen grundlegenden elektrodynamischen Größen.
1. Diskrete Ladungen qi : Die diskreten Ladungen qi können positiv
oder negativ sein. Sie werden immer als punktförmig angesehen. Die
Gesamtladung des Systems ergibt sich als Summe der Einzelladungen:
Q=
X
qi
.
i
2. Ladungsdichte ρ(~r, t) : Oft ist es bequemer, die in der Realität diskreten Ladungen zu kontinuisieren und zu stetigen Ladungsdichten ρ(~r, t)
überzugehen. Die Gesamtladung ergibt sich dann aus der Integration
über das gesamte betrachtete Raumgebiet:
Q=
Z
V
ρ(~r) d3 r
.
Bei Reduktion auf Punktladungen (analog zur Behandlung von Massepunkten der Mechanik) gilt:
ρ(~r) =
X
qi δ(~r − ~ri ) .
i
Es folgt
Q=
Z
V
ρ(~r) d3 r =
Z X
V
i
qi δ(~r−~ri ) d3 r =
X
i
qi
Z
V
δ(~r−~ri ) d3 r =
X
qi
i
gesichert.
3. Strom I und Stromdichte ~j : Bewegte Ladungsverteilungen bedingen einen elektrischen Strom. Wir definieren die elektrische Stromdichte
~j , indem wir fordern, daß
(a) j =| ~j | die Ladung ist, die pro Zeiteinheit durch eine Flächeneinheit senkrecht zur Stromrichtung transportiert wird und daß
(b) ~e~ = ~j/j in Bewegungsrichtung der fließenden Ladung zeigt.
j
34
2 DIE GRUNDGLEICHUNGEN DER ELEKTRODYNAMIK
Im allgemeinen ist ~j sowohl zeitabhängig als auch ortsabhängig. Wenn
sich zur Zeit t alle Ladungen am Ort ~r mit gleicher Geschwindigkeit ~v
bewegen, gilt
~j = ~j(~r, t) = ρ(~r, t) ~v (~r, t) .
Als Strom oder Stromstärke I, welche eine vorgegebene Fläche F passiert, bezeichen wir das Flächenintegral
IF =
Z
F
~j · df~
wobei nur die Komponenente von ~j parallel zur Flächennormale beiträgt.
~j
K
df~
F
2.2
Erhaltung der elektrischen Ladung
In abgeschlossenen Systemen, d.h. in Systemen, die in keiner physikalischen
Wechselwirkung mit der Umgebung stehen, bleibt die Gesamtladung erhalten. Sei nun V ein beliebiges Volumen. Der Ausdruck
d
dt
Z
V
ρ(~r, t) dV
beschreibt die zeitliche Veränderung der in V befindlichen Ladungen. Sie
wird durch die Ladungsmenge bestimmt, die aus diesem Gebiet herausfließt
bzw. in das Gebiet hereintritt. Die pro Zeiteinheit durch das Oberflächenelement df~ bewegte Ladung ist
~j · df~ ,
d.h. (~j · df~) ist der Fluß des Stromdichtevektors ~j durch die infinitesimale
~
Fläche df.
35
2.2 Erhaltung der elektrischen Ladung
z
6
df~
~
* dj
aa
V
-
y
x
Definitionsgemäß gilt
~j · df~ > 0 ,
falls Ladung das Volumen verläßt. Für ein endliches Volumen gilt dann entsprechend die
Integralform der Kontinuitätsgleichung:
d
dt
Z
V
ρ dV = −
I
S(V )
~j · df~ .
Mathematisch äquivalent dazu formulieren wir unter Benutzung des Gauss
schen Integralsatzes nun die differentielle Form der Kontinuitätsgleichung:
d
dt
Z
V
ρ dV = −
Auf diese Weise erhalten wir
Z
V
I
S(V )
~j · df~ = −
|{z}
∂ρ
+ div ~j
∂t
Gauss
!
Z
V
div ~j dV
.
dV = 0 .
Dies muß aber für beliebige Volumina gelten, da wir an Form und Größe
von V keinerlei Forderungen gestellt haben. Folglich gilt in Analogie zur
Integralform der Kontinuitätsgleichung die
36
2 DIE GRUNDGLEICHUNGEN DER ELEKTRODYNAMIK
Differentialform der Kontinuitätsgleichung:
∂ρ
+ div ~j = 0 .
∂t
Erstes Kirchhoffsches Gesetz
: Wir wenden nun die Kontinuitätsgleichung
d
dt
Z
V
ρ dV = −
I
S(V )
~j · df~
auf ein Volumen an, das eine Stromverzweigung aus n Drähten enthält.
I6
I1
w
I5
/
I4
^
I2
I3
Man findet unmittelbar
n
X
d
Iν = 0
Q+
dt
ν=1
wobei Iν =
Fordern wir noch stationäre Ströme
dQ
=0
dt
so erhalten wir als Bilanz
n
X
ν=1
Iν = 0 .
Z
Fν
~j(~r, t) · df~.
~ und B
~
2.3 Definition von E
37
Bei stationären Strömen fließt genau so viel Ladung in ein Volumen hinein
wie hinausfließt. Wir kennen diese Formel schon aus der Experimentalphysik
als Erstes Kirchhoffsches Gesetz oder auch als Knotenregel für elektrische
Netze.
2.3
~ und B
~
Definition von E
Die Elektrodynamik beschreibt alle Erscheinungen, in denen zeitlich und
räumlich veränderliche elektrische Größen und Felder verknüpft sind. Das
elektrische und magnetische Feld eröffnen uns den Weg zur Elektrodynamik.
Es sind die fundamentalen Felder der Elektrodynamik. Wir definieren
~ r , t) → als elektrisches Feld und
E(~
~ r , t) → als magnetisches Feld oder magnetische Induktion.
B(~
Grundeigenschaften der elektromagnetischen Felder:
~ und B
~ denkt man sich durch die Verteilung und Zeitent1. Die Felder E
wicklung der Ladungsverteilung ρ und Stromdichte ~j erzeugt.
2. Wirkungen, die sich durch Veränderungen der Ladungsdichte und Stromdichte ergeben, breiten sich im Vakuum mit Lichtgeschwindigkeit aus.
3. Die Felder vermitteln die Krafteinwirkung auf Ladungen und magneti~ und B
~ dienen der Übertragung
sche Momente, das heißt die Felder E
von Kräften. Als Kraft auf eine Probeladung q im elektrischen und magnetischen Feld ist uns die Lorentzkraft schon bekannt:
Lorentzkraft auf eine Probeladung q :
~ =q E
~ + ~v × B
~
K
c
!
~ und B.
~ Sie verDie Lorentzkraft dient zur quantitativen Definition von E
knüpft Elektrodynamik und Mechanik
.
38
2 DIE GRUNDGLEICHUNGEN DER ELEKTRODYNAMIK
~ r , t):
Elektrisches Feld E(~
~ r , t) wird dabei definiert durch die Kraft
Das elektrische Feld E(~
~ r, t) = q E(~
~ r, t) ,
K(~
die eine am Ort ~r hinzugeführte ruhende Probeladung zu einem festen Zeit~ r, t) verstanden als das Feld, das auch ohne
punkt t erfährt. Dabei wird E(~
Anwesenheit der Punktladung bestehen würde.
~ r , t):
Magnetische Feld B(~
~ r , t) als Kraft definiert, die eine mit
Analog wird das magnetische Feld B(~
Geschwindigkeit ~v sich bewegende Punktladung q erfährt, wobei die Kraft
~ und ~v gerichtet ist.
senkrecht zu B
Die pro Zeitintervall dt zur Verschiebung der Ladung q um die Strecke d~r
vom elektromagnetischen Feld verrichtete Arbeit dW ist
~ · d~r = K
~ · d~r dt = K
~ · ~v dt = q(E
~ + ~v × B)
~ · ~v dt = q E
~ · ~v dt .
dW = K
dt
c
Und als Leistung ergibt sich
dW
~ · ~v dt = q E
~ · ~v
=q E
dt
dt
.
~
~
Wir stellen sofort fest, daß nur das E-Feld,
nicht aber das B-Feld
Arbeit an
Ladungen verrichten kann.
Für kontinuierliche Ladungsverteilungen ist die Einführung einer Kraftdichte ~k sinnvoll:
~k = ρ
~ + ~v × B
~
E
c
!
.
Die Elektrodynamik ist eine Nahwirkungstheorie. Zwischen Ursache und Wirkung vergeht immer eine gewisse Zeit, da Information sich maximal mit Lichtgeschwindigkeit c ausbreitet. Im Gegensatz dazu geht man bei Fernwirkungstheorien davon aus, daß sich Wirkungen plötzlich und unendlich schnell im
39
2.4 Die Maxwellschen Gleichungen im Vakuum
Raum ausbreiten. Ein Vertreter dieser Theorie ist die Newtonsche Mechanik.
2.4
Die Maxwellschen Gleichungen im Vakuum
Wir formulieren nun die Fundamentalgleichungen, d.h. die Axiome der Elektrodynamik. Sie sind benannt nach ihrem Entdecker James Clark Maxwell.
Die Maxwellschen Gleichungen im Vakuum:
~ = −1
(1) rot E
c
~ =
(2) rot B
~
∂B
∂t
~
1 ∂E
c ∂t
+
~ = 4π ρ
(3) div E
4π
c
~j
~ =0
(4) div B
wobei alle Größen ~r- und t-abhängig sein können. Die Maxwellschen Gleichungen sind hier im Gaußschen Maßsystem differentiell formuliert. Wir
lernen bald auch die etwas anschaulichere integrale Formulierung kennen.
Diskutieren wir aber erst einmal einige Folgerungen, die sich sofort aus den
vier Grundgleichungen ergeben.
~ und B
~ erscheinen in den Maxwellschen
1. Als Ursachen der Felder E
Gleichungen die Ladungsdichte ρ und die Stromdichte ~j .
2. Die Lorentzkraft ist in den Maxwellschen Gleichungen nicht enthalten. Allerdings wirken die Felder vermöge der Lorentzkraft selbst
wieder auf die vorhandenen Ladungen und können somit ρ und ~j verändern.
Daraus ergibt sich der folgende Sachverhalt:
3. Zu einer vollständigen Beschreibung von Ladungen und Strömen einerseits und elektromagnetischen Feldern andererseits müssen eigentlich
zusätzlich zu den Maxwellschen Gleichungen noch die Bewegungsgleichungen der Mechanik bzw. der Quantenmechanik betrachtet werden, die gemeinsam gelöst werden müssen. Man hat damit ein gekoppeltes Differential–Gleichungssystem vorliegen.
ρ(~r, t)
~j(~r, t)
Erzeugung der Felder
(Maxwell-Gleichungen)
=⇒
⇐=
Kräfte auf Ladungen und Ströme
(Lorentzkraft)
~ r , t)
E(~
~ r , t)
B(~
40
2 DIE GRUNDGLEICHUNGEN DER ELEKTRODYNAMIK
~ und
4. Häufig werden Zusammenhänge zwischen ρ , ~j und den Feldern E
~ auch durch phänomenologische und empirische Gesetzmäßigkeiten
B
beschreiben. Diese Gesetze sind jedoch nicht aus den Maxwellschen
Gleichungen herleitbar. Als Beispiele seien hier das Ohmsche Gesetz
~ genannt.
~j = σ̂ E
5. Im Folgendem betrachten wir zunächst immer ρ und ~j als vorgegebene
inhomogene Terme in den Maxwellschen Gleichungen.
2.5
2.5.1
Die Maxwellschen Gleichungen in integraler Form
Das Faradaysche Induktionsgesetz
~ = −1
Integrieren wir die Gleichung rot E
c
Berandungslinie Γ, so ergibt sich
Z
~ · df~ = − 1
rot E
c
S
Z
S
~
∂B
∂t
über eine Fläche S mit der
~
∂B
· df~ .
∂t
A. Zeitlich festgehaltene Fläche:
Bei zeitlich festgehaltener Fläche S folgt mit dem Satz von Stokes
Die in einer
Flächenumrandung Γ induzierte Spannung
H
~ · d~r ist gleich der Änderung des Flusses Φ
Uind = Γ E
durch die festgehaltene Fläche S :
I
Γ
~ · d~r =
E
Z
~ · df~ = − 1 d
rot E
c dt
S
Z
S
~ · df~ .
B
Zur Veranschaulichung denke man sich einen materiellen elektrischen
Leiter entlang der Linie Γ geführt, über dem sich beliebig die Fläche
S wölbt. Ein sich verändernder magnetischer Fluß induziert dann in
einem Leiter eine Spannung.
41
2.5 Die Maxwellschen Gleichungen in integraler Form
:
:
-
S
df~
7
~
B
Γ
~ durchdringt die Fläche S, womit sich der magnetische Fluß durch S
B
ergibt zu
Φ=
Z
S
~ · df~ .
B
~ die Kraft pro Elementarladung ist, die auf die Ladungen
während E
des Leiters wirkt. Mit der oben eingeführten induzierten Spannung
I
Γ
~ · d~r = U E
E
ind
formulieren wir das Induktionsgesetz:
1
−
c
dΦ
dt
!
E
= Uind
.
S
Der Index S soll andeuten, daß sich bei der Zeitdifferentiation die Form
und Lage der Randkurve Γ nicht ändern soll. Die Leiterschleife wird im
~ geändert wird.
Raum festgehalten, während das magnetische Feld B
Unter diesen Umständen wird das Induktionsgesetz auch als Erstes
Fundamentalgesetz von Faraday bezeichnet. Es muß betont werden,
daß Γ irgendein Pfad im Raum sein kann, der nicht notwendigerweise mit einem realen Stromkreis zusammenfallen muß. Die obige Glei~ ist das Feld, das
chung ist eine Relation zwischen den Feldern selbst. E
vermöge der Lorentzkraft auf vorhandene Ladungen in einem Leiter
wirkt, wenn ein solcher vorhanden ist.
42
2 DIE GRUNDGLEICHUNGEN DER ELEKTRODYNAMIK
B. Alternative Erzeugung einer induzierten Spannung:
Eine induzierte Spannung sollte unabhängig davon sein, ob man die
felderzeugende Anordnung (Magnet, Feldspule) bewegt, oder ob man
die Leiterschleife im Feld des ruhenden Magneten bewegt, um damit
dem Relativitätsprinzip gerecht zu werden.
Wir wollen deshalb im Folgenden auf die Forderung verzichten, die
Leiterschleife festzuhalten. Erlauben wir also Änderungen der Randkurve Γ :
df~
~
dR
,
,
~
S
6
-
d~r
Γ
Γ′
1
3
~
An jedem Ort von Γ stellen wir eine infinitesimale Verschiebung dR
~ verursacht ein zusätzlider Leiterschleife fest. Jede Verschiebung dR
ches Flächenelement
~ × d~r
df~ = dR
wobei d~r ein infinitesimaler Integrationsweg auf Γ bedeutet. Die Richtung von df~ läßt sich mit der Rechtsschraubenregel festlegen. Eine
Flußänderung durch Veränderung der Leiterschleife ergibt sich aus
Z
~
Z
~
dR
~
~
× d~r · B = (~v × d~r) · B
dt
S
,
wobei ~v = ddtR die Geschwindigkeit für die Verschiebung der Leiterelemente von Γ darstellt. Damit folgt für die gesamte Flußänderung:
43
2.5 Die Maxwellschen Gleichungen in integraler Form
d
dt
Z
S
~ · df~ =
B
~
∂B
~
+
(~v × d~r) · B
· df~
Γ
S ∂t
{z
}
{z
}
|
|
ursprüngliches
mit der Änderung
Induktionsgesetz:
der Randkurve
H
~
verbundene
= −c Γ E · d~r
Flußänderung
I
Z
,
bzw.
d
dt
Z
S
~ · df~ = −c
B
I
Γ
~ · d~r −
E
I
Γ
~ · d~r .
(~v × B)
Das letzte Integral wurde mit der Identität ~a (~b × ~c) = ~c (~a × ~b) =
~b (~c × ~a) umgeformt (zyklische Vertauschung im Spatprodukt). Wir
fassen zusammen zum
Induktionsgesetz
I
1 d Z ~
~
~ · d~r .
~ + 1 ~v × B)
−
B · d f = (E
c dt S
c
Γ
Diese Verallgemeinerung des Induktionsgesetzes erfaßt somit auch Effekte, die bei beliebigen Bewegungen und Verformungen der Leiterschleife auftreten. Die induzierte Spannung ist die Folge der Kräfte, die
auf die in der Schleife befindlichen Ladungsträger wirken. Diese Kraft
ist die oben eingeführte Lorentzkraft. Für eine ruhende Schleife gilt: die
~ . Für eine bewegte
Kraft auf eine Ladung q im elektrischen Feld ist q E
Schleife, bei der die ladungsträger mit einer Geschwindigkeit ~v bewegt
werden, wirkt zusätzlich der zweite Anteil der Lorentzkraft
~ = q (E
~ + ~v × B)
~
K
.
c
Für den Anschluß elektrischer Meßinstrumente ist jedoch der physikalische Ursprung der Kraft unwichtig. Deshalb setzt sich die induzierte
Spannung aus beiden Anteilen der Lorentzkraft zusammen
44
2 DIE GRUNDGLEICHUNGEN DER ELEKTRODYNAMIK
Uind =
2.5.2
I
Γ
!
Z
~ · d~r = − 1 d
~ · df~ = − 1 dΦ
~ + ~v × B
B
E
c
c dt S
c dt
Das Durchflutungsgesetz von Oersted und Amper
Wir integrieren die zweite Maxwellsche Gleichung
~
~ = 1 ∂ E + 4π ~j
rot B
c ∂t
c
über eine Fläche S und erhalten unter Zuhilfenahme des Satzes von Stokes
Z
S
~ · df~ =
rot B
I
Γ
~ · d~r
B
die Beziehung
I
~ · d~r = 1
B
c
Γ
Z
S
~
4π
∂E
· df~ +
∂t
c
Z
S
~j · df~ .
Der zweite Term auf der rechten Seite ist proportional zum Strom durch die
Fläche S. Er hat ein Ringfeld (d.h. eine Zirkulation) der magnetischen Induk~ zur Folge. Was bedeutet der erste Term auf der r.S.? Wir definieren
tion B
dazu eine Größe
~
~jf = 1 ∂ E
4π ∂t
die als Maxwellscher Verschiebungsstrom oder auch Feldstromdichte bezeichnet wird. Wie der elektrische Strom trägt er auch zur Zirkulation des
~ längs des Weges Γ bei. Außerdem überzeugt man sich leicht,
Magnetfeldes B
daß ~jf für die Ladungs-Bilanzgleichung notwendig ist. Dazu wenden wir div
auf die zweite Maxwellsche Gleichung an und finden
~ = 1 ∂ div E
~ + 4π div ~j
0 = div rot B
c ∂t
c
.
2.5 Die Maxwellschen Gleichungen in integraler Form
45
~ = 4πρ ergibt sich wieder die Kontinuitätsgleichung
Mit div E
∂ρ
+ div ~j = 0 .
∂t
2.5.3
Das Gaußsche Durchflutungsgesetz
Wir integrieren nun die dritte Maxwellsche Gleichung
~ = 4π ρ
div E
über ein Volumen V und erhalten unter Verwendung des Gaußschen Satzes
Z
V
~ dV =
div E
I
S
~ · df~
E
die Beziehung
I
S
~ · df~ = 4π
E
Z
V
ρ dV
.
Der elektrische Fluß durch eine geschlossene Oberfläche ist gleich dem 4πfachen der eingeschlossen Ladung.
2.5.4
Die Nichtexistenz magnetischer Ladungen
Aus der vierten Maxwellschen Gleichung
~ =0
div B
folgt mit dem Gaußschen Satz
Z
V
~ dV =
div B
I
S
~ · df~ = 0 .
B
Der magnetische Fluß durch eine geschlossene Oberfläche verschwindet. Es
~
gibt keine Quellen oder Senken des magnetischen Flusses. Das B-Feld
ist ein
reines Zirkularfeld.
46
2.5.5
2 DIE GRUNDGLEICHUNGEN DER ELEKTRODYNAMIK
Übersicht
Das Induktionsgesetz:
(1)
I
~ · d~r = − 1 d
E
c dt
Γ
Z
S
~ · df~ −
B
I
~v
~
d~r · ( × B)
c
Γ
Das Durchflutungsgesetz von Oersted und Amper:
(2)
I
~ · d~r = 1
B
c
Γ
Z
S
~
4π
∂E
· df~ +
∂t
c
Z
S
~j · df~
Das Durchflutungsgesetz von Gauß:
(3)
I
S
~ · df~ = 4π
E
Z
V
ρ dV = 4π Q
Die Nichtexistenz magnetischer Ladungen:
(4)
2.6
I
S
~ · df~ = 0
B
Die Energiebilanz des elektromagnetischen Feldes
Ähnlich wie die Bewegungsgleichung in der Mechanik besitzen auch die Maxwellgleichungen der Elektrodynamik Bilanzgleichungen für die energie, den
Impuls und den Drehimpuls. Zur Herleitung der Energiebilanzgleichung verwenden wir zunächst die erste und zweite Maxwellsche Gleichung
~
~ = − 1 ∂B
(1) rot E
c ∂t
~
~ = 1 ∂ E + 4π ~j
(2) rot B
c ∂t
c
,
~ und die zweite mit E
~ und
Multipliziert man die erste Gleichung mit −B
addiert beide Gleichungen, so folgt unter Benutzung der Beziehung
~ × B)
~ =B
~ · rot E
~ −E
~ · rot B
~
div (E
der Ausdruck
(ohne Beweis)
47
2.6 Die Energiebilanz des elektromagnetischen Feldes
~ × B)
~ = 1 ∂ (E
~2 + B
~ 2 ) + 4π ~j · E
~
−div (E
2c ∂t
c
.
Wir definieren nun den Poynting-Vektor
~ := c (E
~ × B)
~
S
4π
und fassen zusammen:
1 ∂ ~2 ~2
~ − ~j · E
~
(E + B ) = −div S
8π ∂t
.
Dieses Ergebnis erinnert stark an eine Kontinuitätsgleichung für die Ladungen. Zur Interpretation der Gleichung führen wir eine Volumenintegration
durch
1
8π
Z
V
∂ ~2 ~2
(E + B ) dV = −
∂t
Z
V
Z
~ dV −
div S
V
~ dV
~j · E
und verwenden für das erste Integral auf der r.S. den Gaußschen Satz
1
8π
Z
V
∂ ~2 ~2
(E + B ) dV = −
∂t
I
S(V )
~ · df~ −
S
Z
V
~ dV
~j · E
.
Wir wollen nun die einzelnen Terme dieser Gleichung betrachten:
• Der letzte Term auf der r.S. stellt die vom elektromagnetischen Feld
bei der Verschiebung einer Ladung verrichtete Leistung (Arbeit pro
Zeiteinheit) dar. Nach Abschnitt 2.2 galt zunächst für die vom elm
Feld bei der Verschiebung einer Punktladung q verrichteten Arbeit pro
Zeiteinheit
~ · ~v = q E
~ · ~v
~ · d~r = K
(1)
K
dt
woraus sich bei einer kontinuierlichen Ladungsverteilung ergibt
~k · d~r = ~k · ~v = ρE
~ · ~v = ~j · E
~
dt
(2)
48
2 DIE GRUNDGLEICHUNGEN DER ELEKTRODYNAMIK
Damit läßt sich der Term
Z
V
Z
~ dV =
~j · E
V
~ dV =
ρ ~v · E
Z
~v · ~k dV
V
als mechanische Leistung der elektromagnetischen Feldkraft an den bewegten Ladungen im Volumen V interpretieren
• Im ersten Integral auf der r.S. ist der Poynting-Vektor als Energiestromdichte interpretierbar, d.h. als Energiebetrag, der pro Zeiteinheit durch die Oberfläche fließt.
• Schließlich beschreibt der Term auf der linken Seite die zeitliche Ableitung der Energie des elektromagnetischen Feldes im Volumen V . Hier
wird häufig auch eine Größe w e
w=
~2 + B
~2
E
8π
als Energiedichte des elektromagnetischen Feldes eingeführt.
Insgesamt haben wir also erhalten
d
dt
Z
|
V
+
w dV
{z
}
Energie des
elektromagnetischen
Feldes
=−
Z
|
V
~ dV
~j · E
{z
=
}
vom Feld an den
Ladungen verrichtete
mechanische Leistung
I
S(V )
|
~ · df~
S
{z
.
}
Energiestrom durch Oberfläche
S(V )
2.7
Der Impulssatz des elektromagnetischen Feldes
Ausgangspunkt ist die elektromagnetische Kraftdichte
~k = ρ (E
~ + ~v × B)
~
.
c
49
2.7 Der Impulssatz des elektromagnetischen Feldes
Bezeichnen wir mit p~mech den Gesamtimpuls aller Teilchen im Volumen V ,
so gilt gemäß der Newtonschen Mechanik
d
p~mech =
dt
Z
V
~k dV =
Z
V
~ dV =
~ + ~v × B)
ρ (E
c
~
~ dV
~ + j × B)
(ρ E
c
V
Z
.
Wir eliminieren nun ρ und ~j mit Hilfe der zweiten und dritten Maxwellschen
Gleichung
~
~ = 1 ∂ E + 4π ~j
rot B
c ∂t
c
und
~ = 4π ρ .
div E
Dann folgt für den Integranden
~
~ + 1 ~j × B
~ −B
~ × rot B
~
~ div E
~ − 1 ∂E × B
~ = 1 E
ρE
c
4π
c ∂t
Wir formen jetzt noch den Term
~
1 ∂E
c ∂t
.
~ geeignet um:
×B
~
~
1 ∂E
~ × ∂B = 1 ∂ E
~ ×B
~ −1 E
~ ×B
~ +E
~ × rot E
~
~ =1 ∂ E
×B
c ∂t
c ∂t
c
∂t
c ∂t
.
so daß folgt
~ div E
~ +B
~ div B
~ −E
~ × rot E
~ −B
~ × rot B
~
~ = 1 E
~ + 1 ~j × B
ρE
c
4π
1 ∂ ~
~
−
(E × B)
,
4πc ∂t
Um den Term in der ersten Klammer auf der r.S. in eine symmetrische Form
~ gegen B zu bringen, haben wir formal einen Term
unter Vertauschung von E
~
proportional zu div B = 0 eingefügt. Wir fassen zusammen:
50
2 DIE GRUNDGLEICHUNGEN DER ELEKTRODYNAMIK
d
d 1
p~mech +
dt
dt 4πc
=
1
4π
Z V
Z
V
~ × B)
~ dV =
(E
~ div E
~ +B
~ div B−
~
E
~ × rot E
~ −B
~ × rot B
~
E
dV
.
Auf der linken Seite dieser Gleichung steht jeweils unter den Zeitableitungen
der mechanischen Impuls sowie ein Volumenintegral, das wir als Impuls des
elektromagnetischen Feldes im Volumen V interpretieren wollen:
p~em =
1
4πc
Z
~ × B)
~ dV =
(E
V
1
c2
Z
V
~ dV
S
.
Um jedoch eine echte Bilanzgleichung für den Impuls im elektromagnetischen
Feld zu erhalten, müssen wir noch die rechte Seite der eingerahmten Beziehung in ein Oberflächenintegral umformen. Wir betrachten dazu zunächst
die x = 1-Komponente des elektrischen Anteils des Integranden:
~ div E
~ −E
~ × rot E)
~ 1=
(E
= E1
=
=
∂E1 ∂E2 ∂E3
+
+
∂x1
∂x2
∂x3
!
− E2
∂E2 ∂E1
−
∂x1
∂x2
!
+ E3
∂E1 ∂E3
−
∂x3
∂x1
∂
∂
∂
1 ∂
(E12 ) +
(E1 E2 ) +
(E1 E3 ) −
(E 2 + E22 + E32 )
∂x1
∂x2
∂x3
2 ∂x1 1
X
k
∂
1~ ~
(E1 Ek ) − E
· E δ1k
∂xk
2
.
~
Analoges gilt für die beiden anderen Komponenten des E-Anteils.
Zusammen
~
~ gegen B
~
mit dem Term für das B-Feld, den man durch Vertauschung von E
erhält, können wir den Maxwellschen Spannungstensor einführen
Tik := Tikel + Tikm
wobei
!
2.7 Der Impulssatz des elektromagnetischen Feldes
Tikel =
51
1
1~ ~
· E δik )
(Ei Ek − E
4π
2
und
Tikm =
1~ ~
1
· B δik ) .
(Bi Bk − B
4π
2
gilt. Faßt man alle Komponenten zusammen, so läßt sich die obige Gleichung
auch schreiben
X X Z
∂
d
~ei
(~pmech + ~pem ) =
(Tikel + Tikm ) dV
dt
∂x
V
k
i
k
Die rechte Seite ist immer noch kein Oberflächenintegral. Hier können wir
jedoch eine Verallgemeinerung des Gaußschen
SatzesH verwenden. BetracheR
~
ten wir zunächst den Gaussschen Satz V div F dV = S(V ) F~ · df~ für ein Feld
F~ in kartesischen Koordinaten, so gilt
X Z
V
k
X I
∂Fk
dV =
Fk ~ek · df~
∂xk
S
k
Ersetzt man hier eine Komponente Fk durch Tik , wobei der Index i für die
Umformung keine Rolle spielt, so erhält man
X Z
k
V
X
∂Tik
dV =
∂xk
k
I
S
Tik ~ek · df~ .
Damit ergibt sich
X I X
d
~ei
(~pmech + ~pem ) =
Tik~ek · df~ .
dt
S
i
k
Mit df~ = ~ef df (mit ~ef als Einheitsvektor in Richtung der Flächennormalen)
folgt darstellungsunabhängig
52
2 DIE GRUNDGLEICHUNGEN DER ELEKTRODYNAMIK
d
(~pmech + p~em ) =
dt
I
S
~t df
~t == T ~ef = ~tel + ~tm
mit T als Maxwellschen Spannungstensor.
wobei
~tel = T el~ef =
1 ~2
1 ~ ~
E (E · ~ef ) − E
~ef
4π
2
~tm = T m~ef =
1 ~2
1 ~ ~
B (B · ~ef ) − B
~ef
4π
2
Hier läßt sich ~t als Impulsstrom pro Flächeneinheit (Impulsstromdichte)
durch die Oberfläche von V interpretieren, wobei wegen des Vorzeichens ein
positiver Impulsstrom nach innen gerichtet ist. Auch kann man sich ~t als
Spannung (Kraft pro Flächenelement) denken, die auf das kombinierte System aus Teilchen und Feldern innerhalb von V wirkt. Dadurch ist uns ein
Werkzeug gegeben, Kräfte, die auf Materialien in elektromagnetischen Feldern wirken, zu berechnen. Man umschließt einfach das betrachtete Objekt
mit einer Randoberfläche und berechnet die rechte Seite des obigen Ausdruckes.
Lokale Impulsbilanz
Aus der obigen Form der Impulsbilanzgleichung (vor der Umformung vermöge
des Gaussschen Satzes) läßt sich unmittelbar auf die lokale Impulsbilanzgleichung schließen. In kartesischen Koordinaten gilt
~ X X ∂
~k + 1 ∂ S =
~ei
Tik
c2 ∂t
∂xk
i
k
2.8
Die Drehimpulsbilanz des elektromagnetischen Feldes
Analog zur Herleitung des Impulssatzes findet man für die lokale Drehimpulsbilanz (3. Komponente)
53
2.8 Die Drehimpulsbilanz des elektromagnetischen Feldes
~
X ∂
S
∂
M12k
(~r × ~k)3 + (~r × 2 )3 =
∂t
c
∂xk
k
(zyklisch)
.
Der erste Term auf der l.S. stellt die mechanische Drehmomentendichte dar,
während der zweite Term als zeitliche Ableitung der elektromagnetischen
Drehimpulsdichte interpretierbar ist. Der Drehmomententensor Mijk ist gegeben durch
Mijk = xi Tjk − xj Tik
.
Mijk ist offenbar antisymmetrisch bezüglich ij , so daß er nur neun Komponenten ungleich Null besitzt. Obgleich er ein Tensor dritter Stufe ist, kann
er deshalb als ein Pseudotensor zweiter Stufe geschrieben werden.
Die integrale Form der Drehimpulsbilanz erhält man durch Integration über
ein Volumen V . Verwendet man wieder analog zu oben den Gaussschen Satz,
~ mech
so ergibt sich mit Hilfe des mechanischen Drehimpulses L
d~
Lmech =
dt
Z
V
(~r × ~k) dV
~ em im Volumen V
und des elekromagnetischen Drehimpulses L
~ em =
L
Z
V
~
S
~
r × 2 dV
c
die Drehimpuls-Bilanzgleichung in der folgenden Form
d ~
~ em =
Lmech + L
dt
I S
~r × ~t df
Hier läßt sich (~r × ~t) als Drehimpulsstrom durch ein Oberflächenelement
in V hinein interpretieren. Interessiert uns die Frage, welches Moment ein
elektromagnetisches Feld auf ein Volumen V ausübt, so müssen wir in Analogie zum letzten Abschnitt das Oberflächenintegral der Drehimpulsbilanzgleichung auswerten.
54
3
3.1
3 DIE ELEKTROMAGNETISCHEN POTENTIALE
Die elektromagnetischen Potentiale
Definition und Differentialgleichungen
Die Maxwellschen Gleichungen
~ = −1
(1) rot E
c
~ =
(2) rot B
~
∂B
∂t
~
1 ∂E
c ∂t
+
~ = 4π ρ
(3) div E
4π
c
~ =0
(4) div B
~j
stellen ein System gekoppelten partiellen Differentialgleichungen erster Ord~ und B
~ dar. Die zentrale Aufgabe
nung für die elektromagnetischen Felder E
ist es, dieses System zu lösen, das heißt aus den Differentialgleichungen die
~ und B
~ Zu berechnen. Dabei müssen alle vier Gleichungen erfüllt
Felder E
sein. Es stellt sich als hilfreich heraus, sogenannte elektromagnetische Potentiale einzuführen. Wie wir sehen werden, werden durch sie die homogenen
Gleichungen (1) und (4) bereits automatisch erfüllt.
Beginnen wir mit der vierten, als einfachsten der vier Gleichungen
~ =0 .
div B
Diese Gleichung können wir sofort identisch erfüllen, wenn wir ein Vektor~ durch die Beziehung
potential A
~ = rot A
~ .
B
~
einführen. Da wir wissen, daß ein Rotationsfeld keine Quellen besitzt, d.h. div rotA
~
für jedes beliebige Vektorfeld A(~r, t) verschwindet, ist die Gleichung (4) identisch erfüllt.
Die Gleichung (1)
~
~ = − 1 ∂B
rot E
c ∂t
läßt sich nun mit dem eingeführten Vektorpotential in die folgende Form
bringen
~
~ + 1 ∂A = 0 .
rot E
c ∂t
55
3.1 Definition und Differentialgleichungen
Diese Beziehung läßt sich ebenfalls identisch erfüllen, wenn wir den in den
Klammern stehenden Ausdruck als Gradient eines skalaren Feldes darstellen.
Die Rotation eines Gradientenfeldes, rot grad ist immer Null. Dieses Skalarfeld nennen wir −φ und bezeichnen es als skalares Potential:
~
~ + 1 ∂ A = −grad φ .
E
c ∂t
Zusammengefaßt erhalten wir
~
~ = −grad φ − 1 ∂ A
E
c ∂t
~ = rot A
~ .
B
Was haben wir bis jetzt erreicht? Die erste und die vierte der Maxwellsche
~ und B
~ geeignet durch die PoGleichung konnten wir erfüllen, indem wir E
~ und φ darstellten. Die nächste Aufgabe besteht darin, Gleichungen
tentiale A
~
für A und φ zu finden, so daß auch die zweite und dritte Gleichung erfüllt sind.
Zunächst liefert ie zweite Maxwellsche Gleichung
~
~ = 1 ∂ E + 4π ~j
rot B
c ∂t
c
~ = rot A
~
mit B
~
~ = 1 ∂ −grad φ − 1 ∂ A + 4π ~j
rot rot A
c ∂t
c ∂t
c
.
Andererseits gilt aber
~ = grad div A
~−△ A
~ ,
rot rot A
wobei △ ein Differentialoperator darstellt mit der Eigenschaft
2
2
2
~+ ∂ A
~+ ∂ A
~ = (△Ax ) ~ex + (△Ay ) ~ey + (△Az ) ~ez
~ := ∂ A
△A
∂x2
∂y 2
∂z 2
56
3 DIE ELEKTROMAGNETISCHEN POTENTIALE
Hier beachte man, daß △ in der obigen Gleichung nicht als Operation div grad
aufgefaßt werden darf entsprechend der früheren Einführung des LAPLACEOperators. Stattdessen ist hier △ ein neuer Differentialoperator, der auf Vektoren angewendet wird, jedoch in kartesischen Koordinaten dieselbe Gestalt
wie der Laplace-Operator besitzt.
Wir erhalten somit aus der zweiten Maxwellschen Gleichung.
2~
~ − 1 ∂ A − grad
△A
c2 ∂t2
~ + 1 ∂φ
div A
c ∂t
!
=−
4π ~
j
c
Analog gewinnen wir aus der dritten Gleichung
~ = 4π ρ
div E
mit
~
~ = −grad φ − 1 ∂ A
E
c ∂t
die Beziehung
1 ∂
~ = −4π ρ .
div A
c ∂t
△ φ+
~ und φ zwei gekoppelte partielle DifferentialgleichunEs resultieren also für A
gen zweiter Ordnung.
~ und
Bemerkung: Die integrale Formulierung des Zusammenhangs zwischen E
~ mit φ und A
~ lautet
B
Z
S
~ · df~ =
B
Z
S
~ · df~
rot A
=
|{z}
Stokes
I
Γ
~ · d~r
A
57
3.2 Eichtransformationen
und für φ
Z
2
1
~ · d~r = − 1 ∂
E
c ∂t
Z
1
2
~ · d~r − (φ2 − φ1 ) .
A
~ als auch φ haben im Gaussschen Maßsystem die Dimension des
Sowohl A
~ multipliziert mit der Dimension einer Länge.
elektrischen feldes E
3.2
Eichtransformationen
~ und E
~ aus
Wir haben gesehen, dass sich beide elektromagnetischen Felder B
~
den beiden Potentialen A und φ bestimmen lassen
~ = rot A
~
B
~
~ = −grad φ − 1 ∂ A
E
c ∂t
.
Allerdings sind die beiden Potentiale durch diese Gleichungen nicht eindeutig
festgelegt. Vielmehr verbleibt noch eine Freiheit, die wir Im folgenden disku~ und φ vermöge der folgenden Eichtranstieren wollen. Transformiert man A
formation
~→A
~′ = A
~ + grad Λ
A
φ → φ′ = φ −
1 ∂Λ
c ∂t
.
wobei Λ = Λ(~r, t) eine beliebige Funktion von ~r und t ist, so läßt sich leicht
zeigen, daß sich die physikalischen Felder nicht ändern. Die gestellte Behauptung beweisen wir durch Einsetzen:
~ = rot (A
~ ′ − grad Λ) = rot A
~′
B
,
weil rot (grad Λ(~r, t)) identisch verschwindet. Analog folgt
~′
1 ∂Λ
1 ∂A
1 ∂ ~′
′
~
(A − grad Λ) − grad (φ +
)=
− grad φ′
E=−
c ∂t
c ∂t
c ∂t
.
58
3 DIE ELEKTROMAGNETISCHEN POTENTIALE
~ und B
~ bei der obigen
Daraus folgt, daß sich die physikalischen Felder E
Transformation sich nicht ändern. Sie sind eichinvariant. Außerdem besit~ und φ die selbe
zen die oben hergeleieteten Bestimmungsgleichungen für A
′
′
~
Form wie für die transformierten Potentiale A und φ . Die Eichfreiheit in der
Wahl der Eichfunktion Λ(~r, t) verwendet man deshalb zweckmäßig so, daß
~ ′ und φ′ eine für die Lösung möglichst bequeme Form
die Gleichungen für A
besitzen.
3.3
Die Lorentz-Eichung
Wir wollen Λ so wählen, daß gilt
L
~ L + 1 ∂φ = 0 ,
div A
c ∂t
(Lorentzbedingung). Wie lautet die Bedingungsgleichung für die Eichfunktion Λ(~r, t), daß die Lorentzbedingung erfüllt ist? Zunächst gilt
~L = A
~ + grad ΛL
A
φL = φ −
1 ∂ L
Λ
c ∂t
so daß aus der Lorentz-Bedingung folgt
L
2 L
~ + div grad Λ
~ L + 1 ∂φ − 1 ∂ Λ = 0
~ L + 1 ∂φ = div A
div A
c ∂t
c ∂t
c2 ∂t2
und somit
1 ∂2
~ + 1 ∂φ
△ ΛL − 2 2 ΛL = − div A
c ∂t
c ∂t
!
.
Dies ist die gesuchte Dgl für die Eichfunktion ΛL . Die rechte Seite stellt einen
inhomogenen Term dar. Wir werden noch sehen, daß eine solche Dgl immer
Lösungen besitzt, so daß eine Lorentz-Eichung immer möglich ist.
Bemerkung: Innerhalb der Lorentz-Eichung sind noch Eichtransformatio′
nen für ΛL der folgenden Form möglich: ΛL → ΛL = ΛL + λL , wobei λL der
59
3.4 Die Coulomb-Eichung
homogenen Dgl genügen muß
△ λL −
1 ∂2 L
λ =0 .
c2 ∂t2
~ und
Ist ein ΛL gefunden, so ergibt sich für die Bewegungsgleichungen für A
φ
~
1 ∂2A
~
△A − 2
− grad
c ∂t2
~ + 1 ∂φ
div A
c ∂t
!
=−
4π ~
j
c
2
1 ∂
~ + 1 ∂φ
~ = △ φ − 1 ∂ φ + 1 ∂ div A
div A
△ φ+
c ∂t
c2 ∂t2
c ∂t
c ∂t
!
= −4π ρ .
die folgende Vereinfachung
2
~L − 1 ∂ A
~ L = − 4π ~j
△A
c2 ∂t2
c
△ φL −
1 ∂2 L
φ = −4π ρ .
c2 ∂t2
~ L und φL
Das ist ein schönes Ergebnis. Die Lorentz-geeichten Potentiale A
genügen entkoppelten Bewegungsgleichungen. Jede dieser beiden Bewegungsgleichungen stellen eine inhomogene Wellengleichung dar. Bemerkenswert ist
auch die identische Struktur beider Differentialgleichungen.
3.4
Die Coulomb-Eichung
Wir wählen Λ(~r, t) diesmal so, daß gilt
~ .
△ ΛC = −div A
Diese Eichung heißt Coulomb-Eichung oder auch transversale Eichung. Mit
~C = A
~ + grad ΛC
A
folgern wir
~ C = div A
~ + div grad ΛC = 0 .
div A
60
3 DIE ELEKTROMAGNETISCHEN POTENTIALE
so daß die Eichfunktion Λc der folgenden Dgl genügen muß.
~ .
△Λc = −divA
Analog zu oben, sollte noch erwq̈ahnt werden, daß innerhalb der CoulombEichung eine Eichtransformation mit △ λC = 0 möglich ist.
~
Damit reduzieren sich erfreulicherweise unsere Bewegungsgleichungen für A
und φ in der Coulomb-Eichung auf
C
2 ~C
~ C − 1 ∂ A − 1 grad ( ∂φ ) = − 4π ~j
△A
c2 ∂t2
c
∂t
c
△ φC = −4π ρ .
In diesem Falle genügt das skalare Potential φC der sogenannten PoissonGleichung. Dies ist eine Differentialgleichung, deren Lösung wir später noch
studieren werden.
3.5
Die Lagrange-Funktion für geladene Teilchen
Wir wollen im Folgenden die Beschreibung der Eichtransformation bei der
klassischen Bewegung eines geladenen Teilchen im elektromagnetischen Feld
kennenlernen. Dazu betrachten wir die Lagrange-Funktion L eines geladenen Teilchens im elektromagnetischem Feld. Sie lautet
1
1
~ r, t) − φ(~r, t)
~v · A(~
L(~r, ~v , t) = m ~v 2 + q
2
c
.
Zum Beweis werden wir die aus dem Hamiltonschen Prinzip folgenden
Euler-Lagrangeschen Bewegungsgleichungen
∂L
d ∂L
−
=0
dt ∂ ẋi ∂xi
61
3.5 Die Lagrange-Funktion für geladene Teilchen
in die Newtonsche Bewegungsgleichung
~ =q E
~ + ~v × B
~
m ~¨r = K
c
!
überführen. Dazu bilden wir
∂L
q
= m ẋi + Ai
∂ ẋi
c
∂L
∂
= q
∂xi
∂xi
1
~−φ
~v · A
c
i = x, y, z
und erhalten zunächst
q ~
d
m ~v + A
= q grad
dt
c
1
~ −φ
~v · A
c
.
Unter Verwendung der Identität
~
~
dA
~ + ∂A
= (~v · grad) A
dt
∂t
können wir die Bewegungsgleichung weiter umformen in
~ 1
d
1 ∂A
~ + grad 1 ~v · A
~
(m ~v ) = q −grad φ −
−
~v · grad A
dt
c ∂t
c
c
Mit Hilfe der Relation
~ = grad (~v · A)
~ − (~v · grad )A
~
~v × rot A
finden wir schließlich
~ 1
d
1 ∂A
~
~
+ ~v × rot
(m ~v ) = q (−grad φ −
| {z A}) = K
dt
c
∂t
c
{z
}
|
~
=B
~
=E
womit wir die Behauptung bewiesen haben.
.
62
3 DIE ELEKTROMAGNETISCHEN POTENTIALE
Eine Eichtransformationen der Form
~→A
~′ = A
~ + grad Λ
A
φ → φ′ = φ −
1 ∂
Λ
c ∂t
bedeutet für die Lagrange-Funktion
1
1
~ r , t) − φ(~r, t)
L(~r, ~v, t) = m ~v 2 + q
~v · A(~
2
c
eine Transformation in
L → L′ = L +
q
q ∂Λ
q dΛ
~v · grad Λ +
= L+
c
c ∂t
c dt
.
Andererseits wissen wir aus der Mechanik–Vorlesung, daß zwei LagrangeFunktionen, die sich nur durch eine totale Zeitableitung einer beliebigen
Funktion Λ(~r, t) unterscheiden, auf dieselben Bewegungsgleichungen führen.
Deshalb ist die Eichtransformation der Elektrodynamik mit dem LagrangeFormalismus verträglich.