Ph1_M2_SCRIPT
Werbung

Inhalt
1
2
2.1
2.2
2.3
2.4
3
3.1
3.2
3.2.1
3.2.2
3.2.3
3.3
3.4
3.5
3.6
4
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.9.1
4.9.2
4.9.3
4.9.4
4.10
4.11
5
5.1
5.1.1
5.1.2
5.1.3
5.1.4
5.2
5.2.1
5.2.2
6
6.1
6.1.1
6.2
6.2.1
6.2.2
6.3
PhI_M2
Hoeppe, 2009
Vorbemerkungen
Blitzkurs Mechanik
Bewegungsgrößen
Newtons Axiome
Gravitation
Energie und Arbeit
Schwingungen
Einleitung
Freie ungedämpfte harmonische Schwingung
Federpendel
Fadenpendel
Physisches Pendel, Drehpendel
Freie gedämpfte Schwingung
Erzwungene gedämpfte Schwingung
Elektrischer Schwingkreis
Gekoppelte / überlagerte Schwingungen
Wellen
Einleitung
Harmonische ebene Welle
Intensität einer Welle
Wellenausbreitung und Intensität
Überlagerung von Wellen - Dopplereffekt
Reflexion von Wellen
Stehende Wellen
Interferenz
Beugung
Beugung am Spalt
Beugung am Doppelspalt
Beugung am Gitter
Auflösungsvermögen optischer Geräte
Brechung
Dispersion
Optik
Strahlenoptik
Fermat’sches Prinzip
Optische Linsen
Bildkonstruktion
Optische Geräte
Quantennatur des Lichts
Photoeffekt
Teilchen-Welle Dualismus; Materiewellen
Aufbau der Materie
Atomphysik
Atommodelle
Kernphysik
Aufbau von Atomkernen
Radioaktiver Zerfall
Kernenergie und Massendefekt
-1-
1
Vorbemerkungen
Naturwissenschaften
Naturgesetze =
verallgemeinerte Erfahrungstatsachen,
nicht zurückführbar auf grundlegendere
Aussagen / „Gesetzmäßigkeiten“
Physik: „Lehre von den unbelebten Körpern“
Themen:
• Struktur (von Raum und Materie)
• Bewegung (zeitliche Abläufe im Raum)
• Wechselwirkung (z.B. Strahlung - Materie)
Begriffe:
• Raum, Zeit
• Kraft
• Energie, Entropie
Prinzipien:
• Kausalität (Zeitpfeil)
• Erhaltungssätze
Methoden:
• Beobachtung
• Experimente
• Mathematik
PhI_M2
Hoeppe, 2009
-2-
SI - Einheiten
Basisgröße
Länge
Masse
Zeit
el. Stromstärke
Temperatur
Lichtstärke
Abkürzungen für Dezimalfaktoren
Name
Meter
Kilogramm
Sekunde
Ampere
Kelvin
Candela
Zeichen
m
kg
s
A
K
cd
Abgeleitete Größen / Einheiten (Beispiele):
Kraft:
-2
1 Newton = 1 N = 1 kg⋅ m⋅ s
Arbeit / Energie:
1 Joule = 1 J = 1 N⋅ m = kg⋅ m2⋅ s-2
Leistung:
1 Watt = 1 J⋅ s-1 = kg⋅ m2⋅ s-3
Elektr. Spannung:
1 Volt = 1 W ⋅ A-1 = 1 J⋅ s-1⋅ A-1
1018
1015
1012
109
106
103
102
Exa [E]
Peta [p]
Tera [T]
Giga [G]
Mega [M]
Kilo [k]
Hekto [h]
10-1
10-2
10-3
10-6
10-9
10-12
10-15
10-18
Dezi [d]
Centi [c]
Milli [m]
Mikro [µ]
Nano [n]
Pico [p]
Femto[f]
Atto [a]
Mathematische Grundlagen/Schreibweisen:
Größen:
- Skalare
Bsp.:
- Vektoren
Bsp.:
- (Tensoren
Bsp.:
T
r
F
t
J
Temperatur, Zahl
Kraft, Zahlentripel
Trägheitstensor, Matrix)
Funktionen (einer Veränderlichen):
- Quadratische Gleichungen
x + p⋅x+ q = 0 →
2
x1, 2
p
=− ±
2
2
⎛ p⎞
⎜ ⎟ −q
⎝2⎠
- Differentiation (Tangentensteigung)
∆f ( x) df ( x) d
=
=
f ( x)
∆x →0 ∆x
dx
dx
f ′( x) = lim
;
dA(t ) d
= A(t ) = A&
dt
dt
- Integration (Fläche unter einer Kurve)
F ( x) = lim ∑ y ( xi ) ⋅ ∆xi = ∫ y ( x) dx
∆x →0
PhI_M2
Hoeppe, 2009
i
d
f ( x) = f ′( x) → ∫ f ′( x) dx = f ( x)
dx
-3-
Spezielle Funktionen
- sin, cos, tan, (→ Einheitskreis, s.u.)
- log, lg, ln, e, dB
lg( x) = log10 ( x)
f ( x) = 10 x ↔ x = lg( f ( x)) Bsp.: pH-Wert , dB, phon
ln( x) = log e ( x)
f ( x) = e x ↔ x = ln( f ( x))
1
∫ x dx = ln( x) + c
Bsp.: Zerfallsgesetz, Eindringtiefe, ...
e = 2,71828...
Geometrie
- Winkel (→ Einheitskreis, “DEG, RAD, GRAD“ )
- Raumwinkel (→ Einheitskugel)
Raumwinkel: Ω =
A Flächensegment
=
r2
Radius 2
Einheit: Steradiant sr
Vollwinkel: Ω =
4π r 2
= 4π
r2
Vektoroperationen
- Skalarprodukt Bsp.:
- Vektorprodukt Bsp.:
PhI_M2
Hoeppe, 2009
r r
r r r
Drehmoment: D = r × F
Arbeit W = F ⋅ x = F ⋅ x ⋅ cos(α )
r r r
D = r ⋅ F ⋅ sin α
-4-
2
Blitzkurs Mechanik
2.1 Bewegungsgrößen
Ortsvektor: beschreibt den Ort eines Punktes (Teilchens) im Raum
x = x (t )
bzw. 3-dim:
r r
r = r (t )
Geschwindigkeit: beschreibt die zeitliche Veränderung des Ortsvektors
dx (t ) d
v=
= x(t ) = x&
dt
dt
bzw. 3-dim:
r
r dr (t ) d r
r
= r (t ) = r&
v=
dt
dt
Beschleunigung: beschreibt die zeitliche Veränderung der Geschwindigkeit
dv(t ) d
a=
= v(t ) = v& = &x&
dt
dt
bzw. 3-dim:
r
r dv (t ) d r
r
a=
= v (t ) = v&
dt
dt
Bei bekannter Geschwindigkeit bzw. Beschleunigung ergibt sich umgekehrt
jeweils Ort und Geschwindigkeit aus Integration, speziell gilt für:
• Bewegungen mit const. Geschwindigkeit (d.h. a = 0):
a=0
v = v0
x = v0⋅t + x0
• Bewegungen mit const. Beschleunigung (d.h. a = const):
a = a0
Kreisbewegung :
x = ½ a0⋅t2 + v0⋅t + x0
v = a0⋅t + v0
ist eine beschleunigte Bewegung, da sich (zumindest) die
Richtung des Geschwindigkeitsvektors stetig ändert.
Kreisbewegungen werden praktischerweise in Polarkoordinaten beschrieben:
Winkelgeschwindigkeit:
ω=
dϕ
= ϕ&
dt
Winkelbeschleunigung:
α=
dω
= ϕ&&
dt
Zusammenhang Bahngeschwindigkeit - Winkelgeschwindigkeit:
v=
dx r ⋅ dϕ
=
= ϕ& ⋅ r = ω ⋅ r
dt
dt
a = &x& =
r r r
v =ω×r
d dϕ
dv d r ⋅ dϕ
=
=r⋅
= ϕ&& ⋅ r = ω& ⋅ r = α ⋅ r
dt dt
dt dt dt
PhI_M2
Hoeppe, 2009
-5-
2.2 Newtons Axiome
1.
Trägheit
Ein kräftefreier Körper verbleibt im Zustand der Ruhe
oder in gleichmäßiger geradliniger Bewegung
r
a=0
2.
→
r
v = const.
Aktionsprinzip
Die Beschleunigung eines Körpers ist proportional zur auf ihn (in Summe)
einwirkenden Kraft und umgekehrt proportional zu seiner Masse.
r
r F
a=
m
r
r
r
F = m ⋅ a =: − Ft
oder
Ft wird als „Trägheitskraft“ eingeführt, das negative Vorzeichen drückt aus,
dass die „Massenträgheit sich einer angreifenden Kraft widersetzt“.
Für jeden Körper gilt also
r
r
F
∑ i − m⋅a = 0
.
i
Schließt man in diese Formulierung die Trägheitskraft als weitere Kraft mit
ein, so ergibt sich als allgemeinste (und sehr praktische) Formulierung das
d’Alembertsche Prinzip:
r
F
∑ i =0
i
3.
Reaktionsprinzip
Übt ein Körper 1 eine Kraft F12 auf einen Körper 2 aus, so übt umgekehrt
der Körper 2 die Kraft F21 = - F12 auf den Körper 1 aus:
r
r
F12 + F21 = 0
„d.h. , wer etwas schiebt, muss sich irgendwo abstützen“
2.3 Gravitation
Beobachtung: Alle Körper ziehen sich gegenseitig an. Die anziehenden Kraft ist
proportional zu den Massen der Körper und umgekehrt proportional zum Quadrat
ihres Abstandes r.
Für die Kraft zwischen zwei Massen m1 und m2 gilt:
FG = G ⋅
PhI_M2
Hoeppe, 2009
m1 ⋅ m2
r2
Gravitationskonstante: G = 6,672⋅ 10-11 N⋅m2⋅ kg-2
-6-
Erdbeschleunigung
Aufgrund der Masse der Erde erfahren alle Körper an der Erdoberfläche
die gleiche Beschleunigung g ≅ 9,81 m⋅s-2. Er erfährt die Gewichtskraft m⋅g.
Dies folgt aus Gleichsetzen von m⋅a ≡ m1 ⋅ g = FG(m1, mE, rE) mit
mE = 5,9742 ⋅1024 kg und rE = 6371 km.
2.4 Energie und Arbeit
Bewegt eine Kraft F einen Körper in ihrer Richtung, so leistet sie die
Arbeit = Kraft ⋅ Weg. Da die Kraft sich i.A. währenddessen ändert, muss
man diesen Zusammenhang zudem differentiell beschreiben:
r r
dW = F ⋅ ds
r r
W = ∫ F ⋅ ds
Energie ist (in der Mechanik) gespeicherte Arbeit
• Hubarbeit → Potentielle Energie im Schwerefeld der Erde
Bsp.: Heben einer Masse von 1 kg um einen Meter:
W = E pot
r r h
m
= ∫ F ⋅ ds = ∫ m ⋅ g ⋅ ds = m ⋅ g ⋅ h = 1kg ⋅ 9,81 2 ⋅1m = 9,81 Nm = 9,81 J
s
0
• Beschleunigungsarbeit → Kinetische Energie
Bsp.: Fallen einer Masse von 1 kg um einen Meter im Schwerefeld der Erde:
2
1
1 ⎛v⎞
1
= ∫ − m ⋅ g ⋅ ds = m ⋅ g ⋅ h = m ⋅ a ⋅ at 2 = m ⋅ a ⋅ a⎜ ⎟ = mv 2 = 9,81 J
2
2 ⎝a⎠
2
h
0
W = Ekin
• Spannen einer Feder → Potentielle Federenergie
Für eine Feder gelte das Hooksche Gesetz, d.h. die Federkraft sei proportional zu ihrer
Auslenkung x. Mit der Federkonstanten k gilt dann F = k⋅x und für die Arbeit
W = E pot , Feder
x
x0
r
r 0
1
= ∫ FF ⋅ dx = ∫ k ⋅ x ⋅ dx = k ⋅ ∫ x ⋅ dx = k ⋅ x02
2
0
0
Energieerhaltung:
In einem abgeschlossenen System bleibt die Energie erhalten.
In der Mechanik gilt daher für ein System ohne äußere Kräfte
( d.h. auch ohne Reibungskräfte):
E ges = E pot + E kin = const
PhI_M2
Hoeppe, 2009
-7-
3
Schwingungen
3.1 Einleitung
Bei einer periodisch variierenden Amplitude einer
physikalischen Größe spricht man von einer Schwingung.
Mechanik:
Periodische „Hin- und Herbewegung“ aufgrund einer von der
Auslenkung abhängigen rückstellenden Kraft.
Charakteristische Größen:
Frequenz f: Vorgänge pro Sekunde [s-1 = Hz]
Kreisfrequenz: ω = 2π⋅f [ s-1 ]
Periodendauer: T = 1/f [ s ]
Beispiele:
Federpendel
Fadenpendel
Torsionspendel
Elektr. Schwingkreis
Schwingquarz
Flöte
HF-Resonatoren
PhI_M2
Hoeppe, 2009
Optische Resonatoren
Bauwerk
-8-
3.2
3.2.1
Freie ungedämpfte harmonische Schwingung
Federpendel
Eine Masse m hänge an einer Feder, welche dem Hookschen Gesetz genügt:
r
r
Zu jeder Zeit gilt FR = − FT
bzw.
Allgemeine Schwingungsgleichung:
FT + FR = m ⋅ &x& + k ⋅ x = 0
&x& +
→
k
⋅x =0
m
(Lineare DGL 2. Ordnung)
Lösen der DGL mit dem Ansatz x(t) = A ⋅ cos(ωt)
führt zu der Lösung x(t) = x0 ⋅ cos(ωt). Gleiches gilt für den Sinus →
Allgemeine Lösung:
x(t) = A1 ⋅ sin(ωt) + A2 ⋅ cos(ωt) = A ⋅ cos(ωt + ϕ )
mit
ω=
k
m
A1 und A2 bzw. A und ϕ bestimmen sich aus den Anfangsbedingungen, z.B. aus
x(t=0) = x0 und x(t=0) = 0 folgt A1 = 0 und A2 = x0 bzw. ϕ = 0 und A = x0
und damit x(t) = x0 ⋅ cos(ωt).
Alternativ komplexer Ansatz:
x(t) = eλt
→ charakteristische Gleichung
λ2 + k/m = 0
→ λ = ± iω, d.h. x(t) = A1 ⋅ eiωt + A2 ⋅ e-iωt
mit ω =
k
m
A1 und A2 bestimmen sich wieder aus den Anfangsbedingungen:
Mit x(t=0) = x0 und x(t=0) = 0 folgt A1 + A2 = x0 und iω( A1 - A2) = 0, d.h.
x(t) = ½ x0( eiωt + e-iωt ) = x0 ⋅ cos(ωt)
mit Euler:
PhI_M2
Hoeppe, 2009
e±iϕ = cos(ϕ) ± i ⋅sin(ϕ)
-9-
3.2.2
Fadenpendel
Eine Masse m schwinge an einer Schnur der Länge l im Schwerefeld der Erde:
r
r
F
=
−
F
Zu jeder Zeit gilt R
T
wobei
FT = m ⋅ a = m ⋅ &s& = m ⋅ l ⋅ &s&
und
Schwingungsgleichung:
FR = m ⋅ g ⋅ sin ϕ →
ϕ&& +
( Nicht lineare DGL 2. Ordnung)
g
⋅ sin ϕ = 0
l
Für kleine Winkel ϕ gilt sinϕ ≈ ϕ und die DGL lässt sich Linearisieren zur
bekannten Schwingungsgleichung:
ϕ&& +
g
⋅ϕ = 0
l
Für kleine Auslenkungen erhalten wir die allgemeine Lösung:
ϕ(t) = A1 ⋅ sin(ωt) + A2 ⋅ cos(ωt) mit
ω=
g
l
und bei Loslassen im Winkel ϕ0 wie oben gezeichnet ϕ(t) = ϕ0 ⋅ cos(ωt)
3.2.3*
a)
Physisches Pendel, Drehpendel
Physisches oder physikalisches Pendel
Betrachtet man alternativ das obige Fadenpendel als Drehbewegung um den
Aufhängepunkt, erhält man eine allgemeinere Darstellung, die auch für beliebige
im Schwerefeld pendelnde Körper gilt. Anstelle von F = p& = m ⋅ a verwenden wir
jetzt die Drehmomente entsprechend „Newton für Drehbewegungen“ ,
d.h. M = L& = J ⋅ ω& = J ⋅ ϕ&& :
PhI_M2
Hoeppe, 2009
- 10 -
Die Schwerkraft wirkt entsprechend der Masse m auf den Schwerpunkt des
Körpers und erzeugt daher bzgl. des Drehpunktes (im Aufhängepunkt) ein
r
r
r
Drehmoment M = r × F = M = l ⋅ F = l ⋅ m ⋅ g ⋅ sin ϕ . Dieser Winkelbeschleunigung
wirkt das Trägheitsmoment entgegen, d.h. J ⋅ ϕ&& + l ⋅ m ⋅ g ⋅ sin ϕ = 0
und für kleine Winkel gilt näherungsweise
ϕ&& +
l ⋅m⋅ g
⋅ϕ = 0
J
.
Dies ist die bekannte Schwingungsgleichung mit der Lösung
ω 0, phys =
l ⋅m⋅ g
.
J
Für einen Massepunkt ist das Trägheitsmoment m·l²und es ergibt sich als
Grenzfall die Lösung des mathematischen Pendels!
Für einen Körper ist nach dem Satz von Steiner J = JS + m·l², d.h. für einen pendelnden
Körper ist zusätzlich zur Bewegung des Schwerpunktes die Eigendrehung des Körpers um
seinen Schwerpunkt zu berücksichtigen.
b) Dreh- oder Torsionspendel
Bei einem Drehpendel wird die rückstellende Kraft FR , bzw. das rückstellende
Drehmoment MR durch das sog. Direktionsmoment DM einer Spiralfeder gegeben.
Dabei wird das Direktionsmoment DM linear zur Auslenkung ϕ des Pendels
angenommen, d.h. es soll MR = DM· ϕ gelten.
Analog zu oben ergibt sich aus der DGL
die Lösung
ω 0,Dreh =
PhI_M2
Hoeppe, 2009
DM
J
J ⋅ ϕ&& + DM ⋅ ϕ = 0
als Eigenfrequenz
.
- 11 -
3.3
Freie gedämpfte Schwingung
Betrachte Schwingung, dessen Bewegung linear mit der Geschwindigkeit gedämpft
wird. Die Stärke der Dämpfung sei mit der Konstanten c und die Eigenfrequenz der
ungedämpften Schwingung mit ω0 beschrieben:
&x& + c ⋅ x&
+ ω02 ⋅ x = 0
Das Lösen der DGL mit dem Ansatz x(t) = eλt führt unter Berücksichtigung des
Vorzeichenwechsel in der Wurzel zu folgenden Lösungen:
A) Schwache Dämpfung, d.h. ½ c < ω0
x(t ) = x0 ⋅ e
c
− ⋅t
2
⋅ cos(ω ⋅ t + φ )
mit
⎛c⎞
ω = ω −⎜ ⎟
⎝2⎠
2
2
0
→ Maximale Amplitude der Schwingung fällt exponentiell mit der Zeit ab.
B) Starke Dämpfung, d.h. ½ c > ω0
x (t ) = x 0 ⋅ e
c
− ⋅t
2
2
⋅ e ±ω t
mit
⎛c⎞
ω = ⎜ ⎟ − ω02
⎝2⎠
→ Keine Schwingung ! Amplitude fällt exponentiell mit der Zeit ab.
C) Aperiodischer Grenzfall: ½ c = ω0
x (t ) = x 0 ⋅ e
c
− ⋅t
2
→ Keine Schwingung ! Schnellster Abfall der Amplitude.
Keine Dämpfung
Starke Dämpfung
Schwache Dämpfung
Aperiodischer Grenzfall
PhI_M2
Hoeppe, 2009
- 12 -
3.4
Erzwungene gedämpfte Schwingung
Ein schwingungsfähiges System mit der Eigenfrequenz ω0 der ungedämpften
Schwingung werde von einer äußeren periodische Kraft mit der Frequenz ωerr
angeregt. Die Stärke der (schwachen) Dämpfung sei wieder mit der Konstanten c
beschrieben:
&x& + c ⋅ x&
+ ω02 ⋅ x = A ⋅ cos(ωerr t )
Nach dem Einschwingvorgang schwingt das System mit ω = ωerr ,
im Resonanzfall gegenüber dem Erreger um π/2 phasenverschoben:
x(t ) = x0 ⋅ cos(ωt + φ )
Die Amplitude ist abhängig von der Stärke der Anregung, der Dämpfung und
der Differenz der Frequenzen ω0 und ωerr = ω :
x0 =
A
(ω02 − ω 2 ) 2 + (c ⋅ ω ) 2
1 2
2
Sie ist am größten für den Fall der RESONANZ bei ωerr = ω0 − c ≅ ω0
2
In der Nähe der Resonanz sind die Resonanzkurven näherungsweise symmetrisch
und es gilt (ω02 - ω2 )2 ≅ 4ω02 (ω0 - ω )2 .
Dargestellt bzgl. der Energie, d.h. L(ω) ~ x02(ω), spricht man von sog. Lorentzlinien:
L(ω ) =
δ2
(ω 0 − ω ) 2 − δ 2
Ihre Form bzw. ihre relative Steilheit wird durch die sog. Halbwertslinienbreite
∆ω = ½ δ = ¼ c beschrieben. (→ Güte, Verlustwinkel, 3dB-Linienbreite)
PhI_M2
Hoeppe, 2009
- 13 -
3.5
Elektrischer Schwingkreis
Entsprechend den Definitionen der jeweiligen Bauteile/Größen gilt für:
Induktivität L:
& = L ⋅ I&
UL = Φ
Ohmscher Widerstand R:
UR = R ⋅ I
C=
Kapazität C:
Q
UC
→ UC =
Q
C
Nach der sog. Maschenregel (→ Kirchhoffsche Gesetze) ist die Summe der
Spannungsabfälle in obiger Schaltung = 0, d.h. es gilt
Q
U L + U R + U C = L ⋅ I& + R ⋅ I + = 0
C
Die Schwingung wird letztlich von den Ladungen Q im Stromkreis ausgeführt,
mit der Definition des Stroms I = dQ/dt folgt also
&& + R ⋅ Q& + 1 ⋅ Q = 0
Q
L
L ⋅C
Für diese (jetzt bekannte) DGL erhält man als Lösung eine zeitlich sinusförmige
Ladungsverschiebung und somit auch einen sinusförmigen Verlauf von Strom und
Spannung mit der Eigenfrequenz
ω0 =
1
L ⋅C
.
Für einen (in der Praxis immer) gedämpften und getriebenen Schwingkreis, erhält
man Resonanzkurven wie im vorigen Kapitel dargestellt.
Dieses Resonanzverhalten ist z.B. Grundlage für Radiosender und -empfänger.
(→ Elektrischer LC-Schwingkreis, Filter, Radio, Marconi)
PhI_M2
Hoeppe, 2009
- 14 -
3.6*
Gekoppelte / überlagerte Schwingungen
Im Allgemeinen treten mehrere Schwingungen eines Systems gleichzeitig auf.
Sind diese Schwingungen unabhängig, oder nur sehr schwach gekoppelt, überlagern
(addieren) sich einfach die jeweiligen Amplituden.
Sind die Schwingungen gekoppelt, erhält man ein System von Differentialgleichungen, welches sich lösen (entkoppeln) lässt, falls die DGLn linear sind.
Ein einfaches Beispiel besteht aus zwei gleichen Federpendeln, welche durch
eine dritte Feder der Federkonstante D’ gekoppelt sind:
Das entsprechende System von DGLn lautet:
(i)
m1 ⋅ &x&1 + D ⋅ x1 + D'⋅( x1 − x2 ) = 0
(ii)
m2 ⋅ &x&2 + D ⋅ x2 + D'⋅( x2 − x1 ) = 0
Für den Fall gleicher Pendel, d.h. m1 = m2 und D1 = D2 ergibt sich durch
Addition und Subtraktion der Gleichungen (i) und (ii)
m ⋅ ( &x&1 + &x&2 ) + D ⋅ ( x1 + x2 ) = 0
m ⋅ ( &x&1 − &x&2 ) + D ⋅ ( x1 − x2 ) + 2 D'⋅( x1 − x2 ) = 0
Durch Einführung der verallgemeinerten Koordinaten q1=x1+x2 und q2=x1-x2
werden die DGLn entkoppelt und man erhält
q&&1 +
D
⋅ q1 = 0
m
→
ω1 = ω0 =
D
m
q&&2 +
D + 2 D'
⋅ q2 = 0
m
→
ω2 = ω ' =
D + 2 D'
2 D'
= ω0 ⋅ 1 +
m
m
mit der allgemeinen Lösung
q1 (t ) = A1 cos(ω0t ) + A2 sin(ω0t ) = x1 (t ) + x2 (t )
q2 (t ) = B1 cos(ω ' t ) + B2 sin(ω ' t ) = x1 (t ) − x2 (t )
Im Folgenden wird der Fall x&1 (t = 0) = x& 2 (t = 0) = 0 , d.h. A2 = B2 = 0 betrachtet:
a) Gleichsinnige Auslenkung als Startbedingung:
PhI_M2
Hoeppe, 2009
- 15 -
x1(0) = x0 ; x2(0) = x0
→
A = 2x0 ; B = 0 und damit
x1(t) + x2(t) = q1(t) = A⋅cos(ω0t) = 2x0⋅cos(ω0t)
x1(t) - x2(t) = q2(t) = 0
→
x1(t) = x2(t) = x0⋅cos(ω0t)
1. Fundamentalschwingung mit ω0
b) Gegensinnige Auslenkung als Startbedingung:
x1(0) = -x0 ; x2(0) = x0
→
A = 0 ; B = -2x0 und damit
x1(t) + x2(t) = q1(t) = 0
x1(t) - x2(t) = q2(t) = -2x0⋅cos(ω’t)
→
x1(t) = -x2(t) = -x0⋅cos(ω’t)
2. Fundamentalschwingung mit ω’
c) Nur eine Masse auslenken:
x1(0) = x0 ; x2(0) = 0
→
A = x0 ; B = x0 und damit
x1(t) + x2(t) = q1(t) = x0⋅cos(ω0t)
x1(t) - x2(t) = q2(t) = x0⋅cos(ω’t)
→
Auflösen nach x1 und x2 ergibt →
x1(t) = ½x0 (cos(ω0t) + cos(ω’t))
x2(t) = ½x0 (cos(ω0t) - cos(ω’t))
Beide Massen schwingen mit ω0 und ω’, infolgedessen wird auch ständig Energie zischen
ihnen ausgetauscht. Allgemein gilt, dass jede Lösung sich als Überlagerung der beiden
Fundamentalschwingungen darstellen lässt.
PhI_M2
Hoeppe, 2009
- 16 -
Für den Fall sehr schwacher Kopplung, d.h. D’ << D, überlagern sich die
Schwingungen ähnlich wie zwei unabhängige Schwingungen verschiedener
Frequenz. Hier gilt:
ω ' = ω0 ⋅ 1 +
2 D'
D' ⎞
⎛
≅ ω 0 ⎜1 + ⎟
D
D⎠
⎝
Mit Einführung einer mittleren Frequenz
und der Differenzfrequenz
ω=
1
2
(ω0 + ω ' ) ≅ ω0
∆ω = ω '−ω 0
ergibt sich
x1 (t ) =
1⎛
⎜ cos(ω −
2⎝
1
2
∆ω )t + cos(ω +
1
2
⎞
∆ω )t ⎟ = x0 cos( 12 ∆ωt ) ⋅ cos(ω t )
⎠
x2 (t ) =
1⎛
⎜ cos(ω −
2⎝
1
2
∆ω )t − cos(ω +
1
2
⎞
∆ω )t ⎟ = x0 sin( 12 ∆ωt ) ⋅ sin(ω t )
⎠
,
d.h. x1 und x2 führen um π/2 phasenverschoben eine Schwingung mit ω ≅ ω0
aus, wobei die Amplitude jeweils mit der langsameren Differenzfrequenz ∆ω
variiert. Man spricht hier von einer SCHWEBUNG.
x1(t)
x2(t)
Schematische Darstellung des Schwingungsverlaufs für x1 und x2 im Fall kleiner Kopplung
PhI_M2
Hoeppe, 2009
- 17 -
4
Wellen
4.1 Einleitung
Sind viele einzelne schwingende Systeme miteinander gekoppelt, so kann durch
die Kopplung Energie mit endlicher Geschwindigkeit über Entfernungen >> als die
Amplitude der einzelnen Schwingungen übertragen werden. Der Ort der
schwingenden Systeme bleibt im Mittel unverändert, ein Transport von Materie
findet also nicht statt. Man spricht hier von WELLEN.
Man unterscheidet zwischen Longitudinalwellen, bei denen die Ausbreitungsrichtung
in der Schwingungsrichtung liegt, und Transversalwellen, bei denen die
Ausbreitungsrichtung senkrecht zur Schwingungsrichtung liegt.
Transversalwelle
Longitudinalwelle
4.2 Harmonische ebene Welle
Bei einer sinusförmigen Ausbreitung im Raum bzw. in der Zeit spricht man
von einer harmonischen Welle, von einer ebenen Welle bei einer Ausbreitung in
nur einer Richtung (eindimensional).
Nach ‚rechts’ fortschreitende Welle:
A(x,t) = A0⋅cos( kx - ωt )
Nach ‚links’ fortschreitende Welle:
A(x,t) = A0⋅cos( kx + ωt )
A Amplitude
λ Wellenlänge
k = 2π/λ Wellenzahl
f Frequenz der einzelnen Schwingung und der Welle
ω = 2πf Kreisfrequenz der einzelnen Schwingung und der Welle
c Ausbreitungsgeschwindigkeit/Phasengeschwindigkeit der Welle
c=
PhI_M2
Hoeppe, 2009
ω
k
=
2π ⋅ f
= f ⋅λ
2π ⋅ λ−1
- 18 -
Beispiele für Phasengeschwindigkeiten:
Longitudinalwellen:
- Schallwelle in Gasen und Flüssigkeiten:
c=
K
ρ
K: Kompressionsmodul, ρ: Dichte
- Schallwelle in Festkörpern:
c=
E
ρ
E: Elastizitätsmodul, ρ: Dichte
Transversalwellen:
- Seilwelle
c=
σ
ρ⋅A
σ: Seilspannung, ρ: Dichte, A: Seilquerschnitt
- Schallwelle in Festkörpern:
c=
G
ρ
G: Scher- bzw. Schubmodul, ρ: Dichte
- Elektromagnetische Wellen:
c=
c0 =
c0
c
1
1
=
=
= 0
n
ε ⋅µ
ε 0ε r ⋅ µ 0 µ r
ε r ⋅ µr
1
ε 0 ⋅ µ0
in Materie
in Vakuum
ε0: Dielektrische Feldkonstante, εr: Relative Dielektrizitätszahl
µ0: Magnetische Feldkonstante, µr: Relative Permeabilitätszahl
n Brechzahl des Mediums (Optik)
komplexe Darstellung:
1-dim ebene Welle:
A( x, t ) = A0 ⋅ e i ( kx−ωt )
3-dim ebene Welle in beliebiger Richtung k:
rr
r
A(r , t ) = A0 ⋅ ei ( k ⋅r −ωt )
Wellengleichung:
Die obigen Darstellungen für A(x,t) sind Lösungen der Wellengleichung:
1-dim
A = A(x,t):
3-dim: A = A(x,y,z,t):
PhI_M2
Hoeppe, 2009
2
∂2 A
2 ∂ A
=0
−
c
∂x 2
∂t 2
2
∂2 A ∂2 A ⎞
∂2 A
2⎛ ∂ A
&& − c 2 ∆A = 0
⎜
+ 2 ⎟⎟ = 0 bzw. A
+
−
c
2
2
2
⎜
∂z ⎠
∂y
∂t
⎝ ∂x
- 19 -
4.3 Intensität einer Welle
Die durch eine Welle transportierte Energie pro Zeit und Fläche nennt man
die Intensität einer Welle. Sie entspricht also einer Leistung pro Fläche.
Bsp.: Mechanische Welle (Wellenmaschine, Seilwelle, schwingende Saite)
→ kein Transport v. Materie, aber Transport v. Energie in Ausbreitungsrichtung
Die Energie des Teilchens der Masse ∆m am Ort x0 zur Zeit t0
∆E pot =
1 2 1
kA0 = ∆mω 2 A02
2
2
mit
ω=
k
∆m
entspricht der kinetische Energie bei Nulldurchgang nach Zeit T/4:
∆E kin =
1
∆mω 2 A02
2
Durch Wellenbewegung wird Energie mit Geschwindigkeit c an Nachbarn
weitergegeben. Energiestrom ( = Leistung ):
∆x
∆E ∆E ∆V
=
= w⋅ F
⋅
= w⋅ F ⋅c
∆t ∆V ∆t
∆t
mit der Energiedichte w = ∆E/∆V, F = Querschnittsfläche eines Volumenelements
Energiestrom/Fläche = Energiestromdichte = Leistung/Fläche =: Intensität
∆E
= w ⋅ c =: I
F ⋅ ∆t
Bsp: mechanische Welle von oben
w=
∆E 1 ∆m 2 2 1
=
ω A0 = ρ ⋅ ω 2 A02
∆V 2 ∆V
2
→
I=
1
1
1
ρ ⋅ ω 2 A02 ⋅ c = ω 2 A02 ⋅ ρ c =: ω 2 A02 ⋅ Z
2
2
2
Z = ρc heißt Wellenwiderstand
PhI_M2
Hoeppe, 2009
- 20 -
AKUSTIK:
Angabe der Intensität über die Lautstärke L:
⎛ I ⎞
L := 10 ⋅ lg⎜⎜ ⎟⎟ ⋅ dB (Dezibel)
⎝ I0 ⎠
Bezugsschallintensität I0 = 10-12 Watt/m2
( Hörschwelle bei 1 kHz)
oder bzgl. der Schalldruckamplitude p ~ I½ , bzw. I = p²/(ρc)
⎛ p⎞
L := 20 ⋅ lg⎜⎜ ⎟⎟ ⋅ dB (Dezibel)
⎝ p0 ⎠
Bezugsschalldruck p0 = 2·10-5 Pa = 20 µPa
Wellenwiderstand:
Longitudinalwellen in FK + Flüssigkeiten:
E
c FK =
c fl . =
ρ
K
ρ
=
1
ρ ⋅κ *
Elastizitätsmodul E, Kompressionsmodul K, Kompressibilität κ*
ZH2O = ρH2O·cH2O ≅ 1,4·106 kg m-2s-1
Longitudinalwellen in Gasen:
c=
K
ρ
=
κ p
= κ RT
ρ
κ = Isentropenexponent; cLuft ≅ 332 m/s
( = Adiabatenexponent )
ZLUFT = ρLuft·cLuft ≅ 428 kg m s
-2 -1
OPTIK / E.M.-Wellen:
Vakuum:
I = w⋅c =
Vakuumwellenwiderstand
Z 0 :=
1
1 ε0 2
E ⋅ Z0
ε 0 E 2 ⋅ c =:
2
2 µ0
µ0
= 377 Ohm
ε0
In Materie: Z ~ n ⋅ Z 0 = ε r µ r ⋅ Z 0
PhI_M2
Hoeppe, 2009
- 21 -
4.4 Wellenausbreitung und Intensität
A) Verteilung der Intensität im Raum
(Bsp.: E.M.-Welle im Vakuum)
Ebene Welle:
r r
r
A(r , t ) = A0 cos(k ⋅ r − ω t )
→
I = I 0 ~ A2 = const
Intensität bleibt erhalten.
I
A
r
r
I (r ) = 02
A(r , t ) = 0 cos(k ⋅ r − ω t ) →
r
r
Energie bzw. Intensität verteilt sich auf Kugeloberflächen ~ 4πr2 .
(I ~ r-2 gilt auch für „Halbkugeln“ wie z.B. Glühbirne)
Kugelwelle:
B) Dämpfung bei Ausbreitung in Medium
Sind die verbundenen schwingenden Komponenten gedämpft,
so wird auch die Welle längs ihrer Ausbreitungsrichtung gedämpft,
d.h. Ihre Amplitude und ihre Intensität nimmt ab.
Dämpfung = Energieverlust pro Wegstrecke dx: dI ( x) = − I ( x) ⋅ α ⋅ dx
α: materialspezifischer Dämpfungsparameter (Extinktionsfaktor)
dI ( x)
= −α dx
I ( x)
Integration →
I ( x ) = I 0 ⋅ e −α x
⎛ I ( x) ⎞
⎟⎟ = −α x
ln⎜⎜
⎝ I0 ⎠
Optik: Lambert-Beersches Gesetz
oder wegen I ~ A 2 gilt für die Amplitude: A( x) = A0 ⋅ e
Längsgedämpfte ebene Welle:
PhI_M2
Hoeppe, 2009
→
− 12 α x
→
r r
− 12 α r
r
A(r , t ) = A0 ⋅ e
⋅ cos(k ⋅ r − ω t )
- 22 -
4.5 Überlagerung von Wellen - Dopplereffekt
Für (lineare harmonische) Wellen gilt das Superpositionsprinzip:
Treffen Wellen aufeinander, so addieren sich lokal Ihre
Amplituden, die Ausbreitung beider Wellen bleibt unverändert
Doppelreffekt:
A) Tatütata:
Quelle bewegt sich mit Geschwindigkeit v auf im Medium ruhenden Beobachter zu.
→ Wellenlänge wird um v⋅T verkürzt
Quelle in Ruhe:
Quelle bewegt:
x ' = λ ' = c ⋅ T − v ⋅ T = (c − v ) ⋅ T = ( c − v ) ⋅
x = λ = c ⋅T
→T=
λ
→
c
⎛ v⎞
λ ' = λ ⋅ ⎜1 − ⎟
⎝ c⎠
λ
c
⎛ v⎞
bzw. f ' = f ⋅ ⎜1 − ⎟
⎝ c⎠
−1
Überschallknall entspricht „Bugwelle“ für v ≥ c.
Winkel α des Mach’schen Kegels: sinα = c/v =: 1/M (Mach)
v=c:
v>c:
(vgl. auch Kiel- bzw. Bugwelle eines Schiffs bei Wasserwellen)
PhI_M2
Hoeppe, 2009
- 23 -
B) Tatatatü:
Beobachter bewegt sich mit Geschwindigkeit v auf im Medium ruhende Quelle zu.
→ Wellenlänge bleibt erhalten, c erscheint um v vergrößert, (T entspr. verkleinert):
c' = c + v
f '=
→
c'
λ
=
c+v
λ
=
c+v
c+v
⎛ v⎞
= f⋅
= f ⋅ ⎜1 + ⎟
−1
c
c⋅ f
⎝ c⎠
C) beide bewegt:
Beobachter bewegt sich relativ zum Medium mit Geschwindigkeit vB auf Quelle zu,
Quelle bewegt sich relativ zum Medium mit vQ auf Beobachter zu:
→
f '= f ⋅
1+
1−
vB
c
vQ
c
D) Dopplereffekt bei Licht:
Licht (E.M.-Welle) breitet auch im Vakkuum aus, es existiert kein ‚Lichtäther’.
(vgl. hierzu Experiment von Michelson u. Morley.) Entscheidend für den Dopplereffekt
ist daher nur die Relativgeschwindigkeit (v ≅ vQ - vB für v << c) von Quelle und
Beobachter.
→
f '= f ⋅
v
c
v
1−
c
1+
Meist gilt v << c und damit:
⎛ v⎞
f ' ≅ f ⋅ ⎜1 + ⎟
⎝ c⎠
Anwendung/Relevanz:
- Linienverbreiterung in Spektroskopie
- Verschiebung ganzer Spektren →
- Astronomie: Geschwindigkeitsmessungen und Entfernungsbestimmungen durch
Messung der ‚Rotverschiebung’ z = ∆λ/λ.
(Stichworte: Dopplerverbreiterung, Fluchtgeschwindigkeit, Expandierendes
Universum, Hubble-Konstante, Quasare)
Anmerkung:
In allen Formeln zum Dopplereffekt wurde die Geschwindigkeit positiv für aufeinanderzu bewegte
Objekte betrachtet, entfernen sie sich voneinander ist lediglich v durch -v zu ersetzen.
PhI_M2
Hoeppe, 2009
- 24 -
4.6 Reflexion von Wellen
Trifft eine Welle auf ein Medium mit anderem
Wellenwiderstand Z2, wird sie teilweise reflektiert
Aus der Stetigkeit der Amplituden an der Grenzfläche ( A0 + Ar = Atr ) und der
Energieerhaltung ( I0 = Ir + Itr ) folgt die Amplitude der reflektierten Welle Ar
und der transmittierten Welle Atr:
Ar = A0 ⋅
Z0 − Z2
Z0 + Z2
Atr = A0 ⋅
2Z 0
Z0 + Z2
Für Z2 > Z0 wird Ar negativ,
die reflektierte Welle erfährt einen Phasensprung um π.
Für die Intensitäten gilt:
2
Ir ⎛ Z0 − Z2 ⎞
⎟ =: R
=⎜
I 0 ⎜⎝ Z 0 + Z 2 ⎟⎠
Reflexionsfaktor
I tr
4Z 0 Z 2
=
=: 1 − R
I 0 (Z 0 + Z 2 )2
Transmissionsfaktor (Energieerhaltung!)
Diese Gesetzmäßigkeit gilt allgemein für Transversal- und Longitudinalwellen.
Speziell in der Optik gilt wegen Z ~ n Z0 bei Übergang von Medium 1 nach 2:
⎛ n − n2
I
R = r = ⎜⎜ 1
I 0 ⎝ n1 + n 2
PhI_M2
Hoeppe, 2009
⎞
⎟⎟
⎠
2
- 25 -
4.7 Stehende Wellen
Stehende Wellen entstehen durch (mehrfache) Überlagerung von
Wellen mit ihren reflektierten Wellenzügen. Sie verhalten sich
wie eine Schwingung und können auch als solche beschrieben werden:
Wellen sind ‚laufende Schwingungen’, stehende Wellen sind Schwingungen.
Stehende Welle durch Reflexion an dichteren Medien:
Die reflektierte Welle erfährt einen Phasensprung um π, an der Grenzfläche
zwischen den Medien entsteht ein ‚Schwingungsknoten’.
Stehende Welle durch Reflexion an dünneren Medien:
Die reflektierte Welle erfährt keinen Phasensprung, an der Grenzfläche
zwischen den Medien entsteht ein ‚Schwingungsbauch’.
Bei gegebener Frequenz ist Wellenlänge mit c des Mediums festgelegt.
Eine stehende Welle ist möglich für:
L = n⋅
PhI_M2
Hoeppe, 2009
λ
2
n = 1, 2, 3, ...
Resonanzbedingung
- 26 -
umgekehrt:
Für gegebenes L und c tritt Resonanz nur für bestimmte Frequenzen fi = c/λi auf:
L = 1⋅
λ1
L = 2⋅
λ2
L = 3⋅
...
L = n⋅
2
2
λ3
2
λn
2
→
f1 =
c
λ1
→
f2 =
→
f3 =
→
fn =
=
c
λ2
c
λ3
c
λn
c
2L
Grundschwingung
= 2⋅
c
2L
1. Oberschwingung
= 3⋅
c
2L
2. Oberschwingung
= n⋅
c
2L
n-1. Oberschwingung
Bsp.: Schwingende Saiten bei Musikinstrumenten
Stehende Welle durch Reflexion an dünnerem bzw. dichterem Medium:
Eine stehende Welle ist hier möglich für („links Knoten - rechts Bauch“):
L=
1
λ
⎛1 1⎞
⎛2 1⎞
⎛n 1⎞
λ , ⎜ + ⎟λ , ⎜ + ⎟λ ,.... , ⎜ + ⎟λ = (2n − 1)
4
4
⎝2 4⎠
⎝2 4⎠
⎝2 4⎠
λn =
4L
→
2n − 1
fn =
c
λn
= (2n − 1)
c
4L
n = 1, 2, 3, ...
n = 1, 2, 3, ...
Bsp: Mechanische Schwingung einer Stabantenne am Auto, Pfeife, Flöte
PhI_M2
Hoeppe, 2009
- 27 -
Mathematische Beschreibung bei Reflexion am dichteren Medium:
A(x,t) = Ahin + Arück = A0cos(kx-ωt) + A0cos(kx+ωt + π)
cos(α + π ) = − cos(α )
→
A(x,t) = Ahin + Arück = A0cos(kx-ωt) - A0cos(kx+ωt)
cos(α ± β ) = cos(α ) cos( β ) m sin(α ) sin( β )
→
A(x,t) = Ahin + Arück = A0[ { cos(kx)cos(ωt) + sin(kx)sin(ωt) } { cos(kx)cos(ωt) - sin(kx)sin(ωt) } ] →
A(x,t) = 2A0 sin(kx)sin(ωt)
→ in Raum und Zeit periodisch,
→ aber nicht mehr fortschreitend !
→ für kx = nπ immer Amplitude von 0: “Knoten“
→ für kx = nπ + ½π maximale, mit sin(ωt) varierende Amplitude: “Bäuche“
→ Orte der Knoten und Bäuche im Raum fest: „stehende Welle“
AKUSTIK:
Maximale Amplitude der (lokalen) Schwingungen entspricht Schallschnelle,
Orte mit maximaler „Schalldruckamplitude“ bzw. zeitlich max. Druckschwankung
sind um λ/4 verschoben! Bei stehenden Wellen werden dadurch Knoten und Bäuche
vertauscht !
OPTIK / E.M.-Wellen:
Anpassung, d.h. Minimierung von Reflexion, erreichbar durch
- λ/4 Schichten (Entspiegeln)
- λ/4 Trafo’s („Transformation von Wellenwiderständen auf Bezugsebene“)
Problem: Anpassung nur „schmalbandig“ möglich, d.h. nur für kleinen Bereich von
Wellenlängen bzw. Frequenzen.
PhI_M2
Hoeppe, 2009
- 28 -
PhI_M2
Hoeppe, 2009
- 29 -
4.8 Interferenz
Als Interferenz bezeichnet man die Überlagerung von
Wellen gleicher Frequenz und fester Phasenbeziehung.
(Stichwort: Kohärenz)
Konstruktive Interferenz:
→ Verstärkung
Überlagerung bei gleicher Phase
Destruktive Interferenz:
→ Auslöschung
Überlagerung bei Phasenunterschied von π,
bzw. Gangunterschied von λ/2
Räumliche Interferenzmuster ergeben sich bei Überlagerung
von kohärentem Licht unterschiedlicher Ausbreitungsrichtung:
→ Interferenz von Wasserwellen
→ Interferometer (Michelson, Fabry-Perot, Laser, ...)
→ Genaueste Messungen von Weglängen in der Größenordnung von λ
→ Planparallele Schichten, Entspiegelung von Gläsern
→ Vielfachreflexion bzw. Vielstrahlinterferenz, Fabry-Perot Interferometer
→ Beugung an Spalt und Gitter
PhI_M2
Hoeppe, 2009
- 31 -
4.9 Beugung
Unter Beugung versteht man die Ablenkung von Wellen, d.h. die Änderung
ihrer Ausbreitungsrichtung soweit sie nicht durch Brechung bedingt ist.
Erklärung: Huygens’sches Prinzip:
Jeder Punkt einer Wellenfront ist Ausgangspunkt
einer neuen kugelförmigen Elementarwelle
Ebene Welle
4.9.1
Kante
Spalt
Beugung am Spalt
Vereinfachte Darstellung:
Betrachte jeweils 2 Elementarwellen, welche Spalt in halbem Spaltabstand b/2 in
gleicher Richtung verlassen und destruktiv interferieren (→ Minima).
∆=
b
λ
⋅ sin α = n ⋅
2
2
→ Minima für:
sin α = n ⋅
λ
b
mit n = 1, 2, 3, ..
Die Lage der Maxima lässt sich nicht im vereinfachten Bild erklären, sie liegen
aber zwangsläufig zwischen den Minima:
→ Maxima für:
sin α ≅ (2n − 1) ⋅
λ
2b
mit n = 1, 2, 3, ..
und α = 0
PhI_M2
Hoeppe, 2009
- 32 -
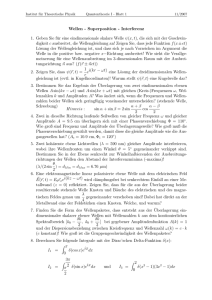
Intensitätsverteilung ergibt sich aus Integration über alle Teilstrahlen /
Elementarwellen des Spalts in einer Richtung:
I SPALT
λ = 0,5 µm
⎛ sin x ⎞
= I0 ⎜
⎟
⎝ x ⎠
2
mit
x=
π ⋅b
sin α
λ
b = 0,1 µm
1
I Spalt ( α )
0.5
0
1
0.5
0
0.5
1
0.5
1
0.5
1
0.5
1
sin( α )
λ = 0,5 µm
b = 0,5 µm
1
I Spalt ( α )
0.5
0
1
0.5
0
sin( α )
λ = 0,5 µm
b = 1 µm
1
I Spalt ( α )
0.5
0
1
0.5
0
sin( α )
λ = 0,5 µm
b = 2 µm
1
I Spalt ( α )
0.5
0
1
0.5
0
sin( α )
PhI_M2
Hoeppe, 2009
- 33 -
4.9.2
Beugung am Doppelspalt
Vereinfachte Darstellung:
Betrachte Elementarwellen, welche Spalte im Abstand d in gleicher Richtung
verlassen und konstruktiv interferieren (→ Maxima). Die Spalte seien zunächst
sehr klein gegen die Wellenlänge:
∆ = d ⋅ sin α = n ⋅ λ
→ Maxima für:
sin α = n ⋅
λ
d
mit n = 0, 1, 2, 3, ..
Die Lage der Minima ergibt sich entsprechend für einen Gangunterschied von
einer halben Wellenlänge:
∆ = d ⋅ sin α =
1 3 5
λ , λ , λ , ... → Minima für:
2 2 2
sin α = (2n + 1) ⋅
λ
2⋅d
mit n = 0, 1, 2, 3, ..
Die Intensitätsverteilung ergibt sich aus der phasengerechten Summation beider
Teilstrahlen, d.h. der Elementarwellen der Spalte in einer Richtung:
Doppelspalt-Interferenzfunktion:
I DS − IF = I 0 cos 2 ( y )
mit
y=
π ⋅d
sin α
λ
Bei Berücksichtigung der endlichen Spaltbreite ergibt sich das Gesamtbeugungsbild
aus der Überlagerung (Multiplikation) der Doppelspalt-Interferenzfunktion mit
der Beugungsfunktion des Spaltes:
⎛ sin x
⎞
I DS = I Spalt ⋅ I DS − IF = I 0 ⎜
⋅ cos y ⎟
⎝ x
⎠
PhI_M2
Hoeppe, 2009
2
mit
x=
π ⋅b
sin α ,
λ
y=
π ⋅d
sin α
λ
- 34 -
Beugungsfunktion des Doppelspalts für λ = 0,5 [µm]:
b = 0,1 ; d = 1
1.2
1
Spalt( α )
Doppelspalt( α )
Spalt( α ) . Doppelspalt( α )
0
0.5
0
1
0.5
b = 0,1 ; d = 3
0
0.5
sin( α )
1
1
1
1
Spalt( α )
Doppelspalt( α )
Spalt( α ) . Doppelspalt( α )
0.5
0
1
0.5
0
0.5
1
0.5
1
0.5
1
sin( α )
b = 1 ; d = 3
1
Spalt( α )
Doppelspalt( α )
Spalt( α ) . Doppelspalt( α )
0.5
0
1
0.5
0
sin( α )
b = 2 ; d = 10
1
Spalt( α )
Doppelspalt( α )
Spalt( α ) . Doppelspalt( α )
0.5
0
1
0.5
0
sin( α )
PhI_M2
Hoeppe, 2009
- 35 -
4.9.3
Beugung am Gitter
Vereinfachte Darstellung:
Betrachte Elementarwellen, welche Spalte im Abstand d in gleicher Richtung
verlassen und konstruktiv interferieren (→ Maxima). Die Spalte seien zunächst
sehr klein gegen die Wellenlänge. (Prinzipiell wie Doppelspalt, jedoch durch die
Vielstrahlinterferenz deutlichere Maxima.)
∆ = d ⋅ sin α = n ⋅ λ
→ Maxima für:
sin α = n ⋅
λ
d
mit n = 0, 1, 2, 3, ..
Die Minima sind - zwischen weiteren Nebenmaxima - zwischen den Maxima verteilt.
Typischerweise sind nur die Maxima deutlich sichtbar und aufgrund der Vielstrahlinterferenz an N Spalten sehr ausgeprägt. Die Gesamtbeugungsfunktion ergibt sich
wieder aus der Überlagerung von Gitter- und Spaltbeugung:
I = I SPALT ⋅ I Gitter
⎛ sin x ⎞
= I0 ⎜
⎟
⎝ x ⎠
2
⎛ sin( N ⋅ y ) ⎞
⎟⎟
⋅ ⎜⎜
⎝ N ⋅ sin( y ) ⎠
2
π ⋅b
sin α
λ
π ⋅d
y=
sin α
λ
x=
Stichworte:
→ Dispersives Element, Gitterspektrometer, Spetrallinien
→ Raumgitter, Röntgenbeugung, Gitterkonstanten, Strukturanalyse
PhI_M2
Hoeppe, 2009
- 36 -
Gitterbeugungsfunktionen für λ = 0,5 µm und verschiedene Gitterparameter:
b = 1 µm
d = 5 µm
1
Spalt( α )
Gitter( α )
N=3
Spalt( α ) . Gitter( α )
0.5
0
1
0.5
0
0.5
1
0.5
1
0.5
1
0.5
1
sin( α )
b = 0,2 µm
d = 2 µm
1
Spalt( α )
Gitter( α )
N=3
Spalt( α ) . Gitter( α )
0.5
0
1
0.5
0
sin( α )
b = 0,2 µm
1
d = 2 µm
Spalt( α )
Gitter( α )
N=6
Spalt( α ) . Gitter( α )
0.5
0
1
0.5
0
sin( α )
b = 0,2 µm
1
Spalt( α )
d = 2 µm
N = 20
Gitter( α )
Spalt( α ) . Gitter( α )
0.5
0
1
0.5
0
sin( α )
PhI_M2
Hoeppe, 2009
- 37 -
4.9.4
Auflösungsvermögen optischer Geräte
A) Mikroskop (Theorie nach Abbe)
Annahme:
Licht zweier nah beieinanderliegender Gegenstandspunkte
Abstand d ≥ λ ist zwangsweise kohärent.
Man betrachtet daher diese Bildpunkte wie die beiden Spalte eines Doppelspaltes→
Abbe:
2 Punkte sind auflösbar, falls mindestens das 1 Minimum des
Doppelspaltbeugungsbildes in das Objektiv des Mikroskops fällt,
d.h. d⋅sinα = 1⋅λ .
Für ein unendlich großes Objektiv wird max. Beugungswinkel 90° und damit
gilt als absolute Grenze (unabhängig von der Art des Mikroskops) dmin ≅ λ .
B) Fernrohr
Annahme:
Licht zweier weit (voneinander) entfernter Gegenstandspunkte,
z.B. zweier Sterne, ist sicher inkohärent.
Die beugende Struktur ist hier die Apertur A des Fernrohres, welches zwei
unabhängige Beugungsscheibchen (vereinfacht: entsprechend Spalt) erzeugt.
Kleinster auflösbarer Winkelabstand αmin , unter welchem die zwei Objekte
(ohne Optik) erscheinen:
α min =
λ
A
C) Spektrales Auflösungsvermögen
Betrifft Trennvermögen bzgl. den unterschiedlichen Wellenlängen eines Spektrums.
Rayleighkriterium:
Zwei „Farben“ sind gerade noch als getrennte Linien erkennbar, wenn
ihr Abstand größer ist als ihre spektrale Halbwertslinienbreite.
Bsp.: Das Auflösungsvermögen AV eines optischen Gitters ist AVG = n · N,
wobei n die verwendete Ordnung und N die Zahl der verwendeten bzw.
der beleuchtetet Spalte beschreibt.
PhI_M2
Hoeppe, 2009
- 38 -
4.10
Brechung
Fällt eine Welle (nicht senkrecht) auf ein Medium mit anderem
Wellenwiderstand (bzw. Brechungsindex), ändert sich ihre Ausbreitungsrichtung.
Man spricht hier von Brechung.
A) Snelliussches Brechungsgesetz
Betrachte ebene Welle, welche schräg auf die Grenzfläche zwischen zwei
Medien fällt. (Die Grenzfläche sei eben für Bereiche ≥ λ .)
Die Frequenz der Welle ändert sich nicht. Aufgrund der verschiedenen
Ausbreitungsgeschwindigkeiten aber die Wellenlängen entsprechend
f =
c
λ
= const =
c1
λ1
=
c2
λ2
Betrachte zwei Teilstrahlen, welche mit dem Gangunterschied λ1 die Grenzfläche
im Abstand x erreichen. Nach dem Huygensschen Prinzip überlagern sich die
Teilwellen mit dem Gangunterschied λ2 im Medium 2 konstruktiv zu einer neuen
Wellenfront, so dass gilt:
λ1
sin α 1
λ
c ⋅f
c
= x = 1 = 1
= 1
sin α 2 λ 2
λ2 c2 ⋅ f c2
x
In der Optik gilt mit
ci =
sin α 1 λ1 c1 n 2
=
=
=
= n12
sin α 2 λ 2 c 2 n1
PhI_M2
Hoeppe, 2009
1
ε i ⋅ µi
=
1
ε 0ε r i ⋅ µ 0 µ r i
=
c0
ε r i ⋅ µr i
=
c0
ni
ni Brechungsindizes; nij Brechzahl
- 39 -
B) Doppelbrechung
Bei anisotropen Medien hängt die Brechzahl von der Schwingungsrichtung
der Welle (Polarisation) ab. (In der Optik wird die Polarisation durch die
Schwingungsrichtung des E-Feldes definiert.) Dadurch werden die Anteile
unterschiedlicher Polarisation (Teilstrahlen) i.A. unterschiedlich gebrochen.
Man spricht von Doppelbrechung.
(klass. Bsp.: Doppelbrechung von Licht an Kalkspat oder Quarz Einkristallen)
C) Totalreflexion (hier: Optik)
Betrachte das Snelliussche Brechungsgesetz für den Übergang vom optisch
dichteren Medium ins optisch dünnere, also für n1 > n2: Das Licht wird jetzt
„vom Lot weg“ gebrochen. Wird der Einfallswinkel α1 größer, so wird bei einem
Winkel α1 = αgrenz der Austrittswinkel α2 = 90° und das Licht kann nicht mehr in
das Medium 2 übergehen. Es wird zwangsläufig vollständig (total) reflektiert.
Entsprechend Snellius gilt hier:
sin α grenz
sin 90°
= sin α grenz =
n2
= n12
n1
(Anwendung: Refraktometer / Abbe-Refraktometer, vgl. Übungen)
Anmerkung:
Der Grad der Reflexion ist auch von der Polarisation des Lichtes und den
entsprechenden Eintrittswinkeln abhängig (vgl. Doppelbrechung). Dies ergibt sich
aus der Anwendung der Stetigkeitsbedingung (vgl. 4.6) für das elektrische Feld an
der Grenzfläche, welche nur für die tangential zur Grenzfläche liegende
Komponente gilt. Daher ändern sich die Anteile der Polarisationen für das
reflektierte Licht mit dem Winkel; für eine bestimmten Winkel, den sog.
Brewsterwinkel αBrewster = arctan(n2/n1), ist das reflektierte Licht sogar vollständig
polarisiert.
PhI_M2
Hoeppe, 2009
- 40 -
4.11*
Dispersion
Die Brechung von Wellen an Grenzflächen ist nicht nur von der Polarisation und
dem Eintrittswinkel abhängig, sondern auch wesentlich von der Wellenlänge bzw.
der Frequenz der Welle.
Ursache hierfür ist die frequenzabhängige Wechselwirkung der Welle mit der
Materie des Mediums, wodurch die Phasengeschwindigkeit der Welle i.A. eine
Funktion der Frequenz wird.
• keine (oder lineare) Dispersion liegt vor, wenn gilt
c = f ⋅λ =
ω
k
mit
= const
dc
=0
dλ
bzw. v g ≡
dω
=c
dk
d.h. c ist konstant; z.B. Licht/E.M. Welle in Vakuum
• normale Dispersion liegt vor, wenn gilt
c = f ⋅ λ( f ) =
ω (k )
k
≠ const ,
mit
dc
>0
dλ
bzw. v g ≡
dω
<c
dk
d.h. die Ausbreitungsgeschwindigkeit c wird mit der
Wellenlänge größer; z.B. sichtbares Licht in Materie
• anomale Dispersion liegt vor, wenn gilt
c = f ⋅ λ( f ) =
ω (k )
k
≠ const ,
mit
dc
<0
dλ
bzw. v g ≡
dω
>c
dk
d.h. c wird mit der Wellenlänge kleiner;
z.B. fernes UV-Licht in Materie, Mikrowellen in Hohleiter
Anwendung: Prismenspektralapparat, Regenbogen
Anmerkung: In der Nachrichtentechnik werden Signale mit Hilfe verschiedener
Frequenzen übertragen, breiten sich diese in Folge einer Dispersion unterschiedlich
schnell aus, kann es zu einem Signalverlust kommen. Der Schwerpunkt eines Wellenpaketes,
welches aus verschiedenen Frequenzen besteht, breitet sich mit der sog.
Gruppengeschwindigkeit vg = dω/dk aus.
PhI_M2
Hoeppe, 2009
- 41 -
5
5.1
5.1.1
Optik
Strahlenoptik
Fermat’sches Prinzip
A) Optische Weglänge
Durch die Einführung der optischen Weglänge
∆=n·s
wird die geringere Phasengeschwindigkeit c’ in einem Medium auf ein
scheinbar vergrößerte Weglänge abgebildet. n bezeichnet hier den Brechungsindex
im Medium und s die jeweilige geometrische Weglänge.
B) Fermat’sches Prinzip
Ein Lichtstrahl, der von Punkt A nach B gelangt, verläuft auf dem
Weg mit der kürzesten optischen Weglänge, d.h. ∆ → Min.
Bsp:
Optische Weglänge in Medium 1:
Optische Weglänge in Medium 2:
2
∆1 = n1 · sAX ; sAX = a2 + x2
2
∆2 = n2 · sXB ; sXB = b2 + (c-x)2
Gesamte Optische Weglänge: ∆(x) = ... → Min. , d.h.
daraus folgt
n1 ⋅
x
s AX
= n2 ⋅
c−x
s XB
und mit sin α 1 =
!
d
∆ ( x) = 0
dx
x
s AX
bzw.
sin α 2 =
c−x
s XB
unmittelbar das Snelliussche Brechungsgesetz: n1 ⋅ sin α 1 = n 2 ⋅ sin α 2
PhI_M2
Hoeppe, 2009
- 42 -
5.1.2
Optische Linsen
Linsen dienen der gezielten Lichtbrechung durch gekrümmte Oberflächen.
Der Strahlengang berechnet sich durch die lokale Anwendung des Snelliusschen
Brechungsgesetzes (vgl. „Linsen.exe“):
A) Linsenformen:
Bikonvex, Plankonvex, Bikonkav, Plankonkav, konvex-konkav
B) Hauptebenen:
Zur Vereinfachung der Beschreibung des Strahlenganges einer Linse
werden sog. Hauptebenen eingeführt. Die Brennweite f entspricht dem Abstand
Hauptebene Fokus, an welchem parallel einfallende Strahlen zusammenlaufen.
Bei Konkavlinsen wird die Brennweite negativ angegeben, sie entspricht dem
Abstand zum virtuellen Fokus (→ virtuelles Bild).
Bei dicken Linsen oder Linsensystemen sind i.A. zwei Hauptebenen nötig, um das
Abbildungsverhalten richtig zu beschreiben. Für asymmetrische Linsen bzw.
Linsensysteme liegen diese in ungleicher Entfernung vom Linsenmittelpunkt.
(Stichwort: „Dicke Linse“)
PhI_M2
Hoeppe, 2009
- 43 -
C) Brechwert, Linsenmacherformel:
D=
1
f
nennt man Brechtwert (Brechkraft) einer Linse.
Einheit: Dioptrie, 1 dptr = 1 m-1
Für eine Sphärische Linse mit den Krümmungsradien r1 und r2 gilt näherungsweise
die Linsenmacherformel:
D=
⎛1 1⎞
1
= (n − 1) ⋅ ⎜⎜ + ⎟⎟
f
⎝ r1 r2 ⎠
D) Linsenfehler:
- Sphärische Aberration
Sphärische Linsen fokussieren nur für große Krümmungsradien
bzw. achsnahe Strahlen hinreichend gut. (vgl. „Linsen.exe“)
- Astigmatismus
uneinheitliche Krümmungsradien in der zur opt. Achse senkrechten Ebene
(zylindrische Verformung) führen zu verschiedenen Brennweiten bzw. zu
einer ‚Brennlinie’ statt einem Brennpunkt.
- Chromatische Aberration
Infolge der Dispersion des Linsenmaterials hat die Linse für Licht
verschiedener Wellenlänge verschiedene Brennpunkte.
Abhilfe schaffen komplexe Linsensysteme mit Linsen
aus verschiedenen Materialien bzw. Brechzahlen.
Hohlspiegel zeigen diesen Fehler nicht. Daher werden insbesondere bei Spektral-
apparaten eher Hohlspiegel als Linsen verwendet. Zudem zeigen diese neben der
fehlenden Dispersion auch keine Absorption, d.h. das Licht (insbesondere UV-Licht)
wird nicht gedämpft. Überhaupt werden häufig Spiegel statt Linsen verwendet, wenn
die verfügbaren Intensitäten schwach sind: Linsen mit Durchmessern größer als z.B.
einen Meter sind teuer. schwer und damit mechanisch instabil.
In der Astronomie findet man daher eigentlich eher Spiegelteleskope.
PhI_M2
Hoeppe, 2009
- 44 -
5.1.3
Bildkonstruktion
A) Abbildungsgesetz
Die Abbildung eines Gegenstandspunktes (Pfeilspitze) lässt sich mit Hilfe der
Hauptebene und zwei Strahlen einfach konstruieren:
1. Der Parallelstrahl wird an H durch F’ gebrochen.
2. Umgekehrt wird der Fokusstrahl and der Hauptebene zu einem Parallelstrahl
hinter der Linse gebrochen.
( 3. Häufig auch betrachtet: der Mittelpunktsstrahl wird nicht gebrochen)
Durch betrachten von tanϕ (Strahlensätze) folgt das Abbildungsgesetz
B b
=
G g
und nach etwas Umformung die Linsen-Abbildungsformel:
1 1 1
= +
f b g
B) Linsensysteme
Die Brechkraft (direkt) hintereinandergeschalteter Linsen addiert sich:
D = D1 + D2
→
1
1
1
= +
f
f1 f 2
(Bei Konkavlinsen ist das negative Vorzeichen von f zu beachten!)
PhI_M2
Hoeppe, 2009
- 45 -
Offen bleibt jedoch die Frage der Bildkonstruktion, da bei der zweiten Linse
der Fokusstrahl nicht mehr konstruiert werden kann:
Da die Brechkraft der Linsen sich addiert (vgl. o.), sollte eine Konstruktion mit
der Brennweite f möglich sein, jedoch muss hier auch der Abstand der beiden
Einzellinsen berücksichtigt werden!
C) Hauptebenen (Dicke Linsen)
Durch Einführung von zwei Hauptebenen (für obiges Linsensystem ca. im
Abstand der beiden Linsen an den Orten H1 und H2) und der Gesamtbrennweite f
konstruiert sich die Abbildung wie folgt:
1. Der Parallelstrahl wird an der zweiten Hauptebene H’ durch F’ gebrochen.
2. Umgekehrt wird der Fokusstrahl durch F an H zu einem Parallelstrahl.
Auch für dicke Linsen müssen für eine gute Beschreibung der Abbildung zwei
Hauptebenen H und H’ und i.A. auch zwei Brennweiten f und f’ verwendet werden.
Obige Darstellung ist etwas vereinfacht:
Für ein Linsensystem aus zwei verschiedenen Linsen oder eine asymmetrische
dicke Linsen liegen die Hauptebenen H und H’ asymmetrisch im Linsenkörper oder
sogar außerhalb von ihm. Die Brennweiten f und f’ links bzw. rechts der Linse sind
jedoch betragsmäßig gleich, falls die Linse an Medien gleicher Brechzahl grenzt.
PhI_M2
Hoeppe, 2009
- 46 -
5.1.4
Optische Geräte
A) Sehwinkel
Der Sehwinkel für einen ohne Hilfsmittel betrachteten Gegenstand ist abhängig
von der Größe und der Entfernung des Objektes. Für einen (kleinen) Gegenstand
wird als Bezugsgröße der Sehwinkel ε0 definiert, der sich bei Betrachtung des
Gegenstandes aus der Bezugssehweite (deutliche Sehweite) von 25 cm ergibt:
B) Vergrößerung
Durch Einbringen eines optischen Geräts in den Strahlengang wird der Sehwinkel,
also der Winkel unter dem das Bild eines Gegenstandes erscheint, vergrößert.
Als Vergrößerung V bezeichnet man das Verhältnis der Winkel ε/ε0 .
V ≡
ε
ε0
Wenn der Sehwinkel sehr klein ist gilt auch ε ≅ tan ε = G/g
C) Lupe
Ein Lupe wird betrieben mit g ≤ f, wobei das Bild mit einem entspannten Auge
betrachtet wird, d.h. Starhlen eines Bildpunktes fallen parallel in das Auge. Man
erhält ein virtuelles (hier aufrechtes) Bild mit einer Vergrößerung V von:
V =
PhI_M2
Hoeppe, 2009
ε
G/g G/ f
≅
≅
ε 0 G / s0 G / s0
→
V LUPE =
s0
f
( in praxi V ≤ 10 )
- 47 -
D) Mikroskop
Das Mikroskop besteht aus einem Linsensystem mit mindestens 2 Konvexlinsen.
Das vom Objektiv erzeugte Zwischenbild B wird mit dem Okular wie mit einer
Lupe betrachtet:
- Lateralvergrößerung durch Objektiv:
- Vergrößerung durch Okular ~ Lupe:
→ Gesamtvergrößerung:
VMik =
B b b
= ≅
G g
f
s
Vok ≅ 0 ≅ 10
f ok
b s0
b
⋅
≅ ⋅ 10
f f ok
f
( z.B.: f ≅ 3mm; b ≅ 300mm → VMik ≅ 1000 ; Stärke Vergrößerungen
machen aus wellenoptischen Gründen keinen Sinn, vgl. 4.9.4)
E) Fernrohr
Hier sog. astronomisches Fernrohr: Aufbau vergleichbar mit Mikroskop, jedoch
sind hier die einfallenden Strahlen praktisch parallel, d.h. g → ∞. Das Zwischenbild
erscheint daher direkt hinter dem Brennpunkt des Objektivs, womit fobj und fok
praktisch zusammenfallen:
Mit tan ε 0 ≅ ε 0 ≅
B
B
und tan ε ≅ ε ≅
gilt:
f ok
f obj
V Fern =
f obj
f ok
(s.a.: Keplersches - oder Galileisches Fernrohr)
PhI_M2
Hoeppe, 2009
- 48 -
5.2
Quantennatur des Lichts
Newtons Teilchenhypothese des Lichts ist ungeeignet zur Beschreibung
der Ausbreitung des Lichts. Zur Erklärung von z.B. Beugung und Interferenz
muss das Wellenmodell verwendet werden.
Es zeigt sich jedoch, dass zur Beschreibung von Wechselwirkungen des Lichts
mit Materie (Absorption und Emission) wieder ein Teilchencharakter des Lichts
angenommen werden muss (→ Lichtquanten, Photonen)
5.2.1
Photoeffekt
Fällt (monochromatisches) Licht auf eine (elektrisch leitende) Kathode in einer
Vakuumröhre, so können durch das Licht Elektronen ausgelöst werden. Die über die
Anode abfließenden Elektronen können als elektrischer Strom gemessen werden:
Dieser Strom nimmt mit der Lichtintensität zu, kann aber unabhängig von der
Lichtintensität I durch Anlegen einer Gegenspannung U0 zum versiegen gebracht
werden! Man beobachtet, dass die jeweilig anzulegende Spannung U0 eine lineare
Funktion der Frequenz f des eingestrahlten Lichts ist:
U 0 = U 0 ( f ) = const ⋅ f − ∆U
∆U = const ⋅ f grenz
Auch ohne Anlegen einer Gegenspannung, also für U0 = 0 , wird erst ab f ≥ fgrenz
ein Photostrom beobachtet. ∆U ist weder von der Frequenz noch von der
Intensität des Lichts abhängig sondern nur abhängig von den verwendeten
Materialien im Versuchsaufbau.
PhI_M2
Hoeppe, 2009
- 49 -
Erklärung (Einstein, 1905):
Licht kann seine Energie nur in ‚Portionen’ abgeben, wobei eine
‚Energieportion’ E = h⋅f ein Lichtquant bzw. ein Photon definiert.
h ist das sog. Planck’sche Wirkungsquantum: h = 6,626⋅ 10-34 J⋅s
Interpretiert man ∆U⋅e als Austrittsarbeit ∆WA, welche geleistet werden
muss, um die Elektronen aus der Kathode zu lösen, ergibt sich:
U ⋅ e + ∆U ⋅ e = U ⋅ e + ∆W A = const ⋅ f ≡ h ⋅ f = E PHOTON
Es fließt demnach nur ein Strom, wenn die Energie der eingestrahlten Photonen
größer ist als ∆WA, und die ausgelösten Elektronen noch eine positive kinetische
Energie Ekin = h⋅f - ∆WA erhalten.
Anwendungen des Photoeffekts:
- Lichtintensitätsmessung
Photozelle wie oben abgebildet wird bei pos. angelegter Spannung U
in Sättigung betrieben. Der Photostrom ist dann proportional zur
Lichtintensität, d.h. zur Zahl einfallender Photonen (Bsp.: Geigerzähler)
- Sekundärelektronenvervielfacher
(→ Photomultiplier) Über die Erzeugung von Photonen durch einzelne schnelle
Elektronen, werden wiederum in einer Hochspannungsanordnung mittels des
Photoeffekts viele Elektronen ausgelöst und damit zu leicht messbaren
Stromstößen. (s.a. REM)
- Halbleiterbauteile wie z.B. Solarzelle ( innerer Photoeffekt )
Durch Absorption eines Photons wird ein Atom bzw. Molekül ionisiert. Das freie
Elektron verlässt aber das Material nicht, sondern bleibt als Ladungsträger
in dem Festkörper erhalten (Anhebung ins Leitungsband).
So wird die Leitfähigkeit bzw. der elektr. Widerstand des Halbleiters abhängig
von der Lichtintensität (→ Photosensoren).
Werden bei geeigneter Kombination von Halbleitern die vom Licht erzeugten
Ladungen getrennt, kann die Lichtenergie in elektrischen Strom umgewandelt
werden.
PhI_M2
Hoeppe, 2009
- 50 -
5.2.2
Teilchen-Welle Dualismus; Materiewellen
A) Elektronenstreuexperiment von G.P. Thomson (1892-1975) 1927 :
Thomson beschoss eine Graphitfolie mit in einer Vakuumröhre beschleunigten
Elektronen. Das beobachtete Interferenzbild am Schirm kann nur durch
Welleneigenschaften der Elektronen erklärt werden.
bereits zuvor:
B) De Broglie (1892-1987) Wellenlänge von Teilchen 1924 :
Teilchen haben entsprechend ihres Impulses p (d.h. ihrer Masse und kinetischen
Energie) eine Wellenlänge
h
λ deBroglie =
p
und breiten sich wie Wellen aus.
Für im E-Feld beschleunigte Elektronen gilt mit E kin =
λe =
−
h
=
p
p2
1
me v 2 =
=U ⋅e:
2
2 ⋅ me
h
2 ⋅ me ⋅ U ⋅ e
Streuexperimente wie das von Thomson lassen sich so erklären. Es zeigt sich
letztlich, das ein Teilchen nicht durch eine Welle allein sondern durch ein
Wellenpaket beschrieben werden muss. Die Teilchengeschwindigkeit entspricht
der Gruppengeschwindigkeit dieses Wellenpaketes und nicht der (größeren)
Phasengeschwindigkeit.
In Folge der Dispersion laufen diese Wellenpakete „mit der Zeit auseinander“, wodurch der
Ort eines Teilchens immer unbestimmter wird. Hier zeigen sich
bereits die begrifflichen Schwierigkeiten der ‚Wellenmechanik’ bzw. der Quantentheorie
(→Unschärferelation, Messprozess).
PhI_M2
Hoeppe, 2009
- 51 -
6.
6.1
6.1.1
Aufbau der Materie
Atomphysik
Atommodelle
A) Spektrallinien
Licht wird von Materie / Atomen i.A. nicht als kontinuierliches Spektrum,
sondern insbesondere von Gasen als Linienspektrum emittiert.
Balmer (1825-1898) fand 1885 empirisch, dass das Linienspektrum des
Wasserstoff darstellbar ist als:
f =
1 ⎞
⎛ 1
= Rf ⎜ 2 − 2 ⎟
λ
n ⎠
⎝m
c
Rf = 3,288·1015 Hz, Rydbergfrequenz
Neben den chemischen Eigenschaften der Atome, musste ein gutes Modell
für den Aufbau eines Atoms auch die Spektrallinien erklären können.
B) Atommodell von J.J. Thomson (1856-1940) 1904:
Spektrallinien ?
Streuversuch von Rutherford?
C) Streuversuch von Rutherford (1871-1937) 1911:
Beschuss einer dünnen Goldfolie
mit Teilchen (He2+-Kernen):
Die meisten Teilchen werden kaum
oder gar nicht abgelenkt
Winkelverteilung der Streustrahlung war theoretisch nur
erklärbar mit der Annahme von
„harten“ schweren Kernen mit
Durchmessern von ca. 10-15 m,
also viel kleiner als Atom mit ca. 10-10 m!
PhI_M2
Hoeppe, 2009
- 52 -
D) Rutherford / Bohrsches (1885-1962) Atommodell 1916:
Fe =
1 e 2 ! me v 2
=
= Fz
4πε 0 r 2
r
E pot = −
1 e2
4πε 0 r
;
Ekin =
1
me v 2
2
→ Gesamtenergie
Eges = Ekin + E pot = −
1 e2
8πε 0 r
Strahlung?
Forderung Bohr: Stabile Bahn nur für
!
Wirkung = ∫ pdq = n ⋅ h
→
rn =
bzw.
r
l = n⋅h
n 2ε 0 h 2
=: n 2 r0
π mee 2
En = −
n = 1, 2, 3, ..
1 me e 4
1
=: − 2 E A
2
2
n 8ε 0 h
n
n: Energie / Hauptquantenzahl ( Energien bzgl. l entartet)
Das Spektrum des H-Atoms:
En = −
1 me e 4
1
1
= − 2 2,18010 ⋅ 10 −18 J = − 2 13,6 eV
2
2
n 8ε 0 h
n
n
Emission / Absorption:
hf i ,k = hω i ,k = ∆Ei ,k = Ei − E k = 13,6 eV ⋅
1
1
− 2
2
i
k
i, k = 1, 2, 3 ..
→
f i ,k =
∆E i , k
h
=
13,6 eV 1
1
⋅ 2 − 2
h
i
k
Die Balmer Serie entspricht Übergängen von
angeregten Zuständen mit n = 3, 4, 5, .. auf den
Zustand n = 2. Später beobachtet:
→ n = 1: Lyman-Serie (UV)
→ n = 3: Paschen-Serie (IR)
→ n = 4: Bracket-Serie (IR)
→ n = 5: Pfund-Serie (IR)
PhI_M2
Hoeppe, 2009
- 53 -
Definitionsgemäß ist die Energie eines freien Elektrons positiv, die eines
gebundenen Elektrons negativ (→Bindungsenergie). Ein angeregter Zustand
entspricht einer höheren Energie (n > 1) bzw. geringeren Bindungsenergie. Für die
Ionisation aus dem Grundzustand, also dem Übergang n = 1 → n = ∞, wird folglich die
Energie entsprechend n = 1 also 13,6 eV = 2,18·10-18 J für das H-Atom benötigt.
Was für die Emission von Licht gilt, gilt auch für die Absorption: Dies erklärt u.a.
das ‚reverse’ Absorptionsspektrum des Sonnenlichts hervorgerufen durch
vergleichsweise kühlere Gase in den äußeren Schichten der Sonne(n).
(→ Fraunhoferlinien)
E) Ergänzungen des Bohrschen Modells durch Sommerfeld (1868-1951)
- Berücksichtigung der Mitbewegung des Kerns (reduzierte Masse des e-)
- Zulassen von Ellipsenbahnen (vgl. Planeten) + relativistische Masse des e→ Aufhebung der l – Entartung (d.h. Energien auch von l abhängig)
→ weitere Quantenzahl l = 0, 1, .. n-1
→ Erklärung der Feinstruktur,
z.B. gelbe „Natrium D-Linie“ bei ~ 590 nm ↔ 589,59 nm + 589,00 nm
Alle klassischen Atommodelle versagen bei größeren bzw. komplizierteren Atomen,
neben den Spektrallinien können u.a. die magnetischen Eigenschaften nicht erklärt
werden.
F) Quantenmechanisches Atommodell
Die Schrödingergleichung der Quantentheorie ‚liefert’ für gebundene
Teilchen (z.B. e- im Atom) immer Lösungen/erlaubte Zustände mit diskreten
Energien (→ Quantisierung). Alle beobachteten Spektrallinien, von Atomen (und
auch Molekülen) können erklärt werden. Die Beschreibung von Materie als Wellen
führt letztlich nur zu Aufenthaltswahrscheinlichkeiten im Raum (→ Orbitale)
anstelle eines genau definierten Ortes der betrachteten Elektronen.
Sehr stark vereinfacht:
e- als stehende Welle im Potential des Atomkerns. Es sind nur Wellenlängen und
damit Zustände erlaubt, für die sich „konstruktive Interferenz“ ergibt, d.h. der
Umfang der Elektronenbahn muss ein ganzzahliges Vielfaches der Wellenlänge sein:
PhI_M2
Hoeppe, 2009
- 54 -
Aus der relativistischen Theorie des Elektrons von Dirac (1902-1984) 1928 folgt
neben n und l eine weitere Quantenzahl s, welche den Spin = Eigendrehimpuls des
Elektrons beschreibt. Die Struktur des Periodensystems der Elemente spiegelt
sich in den Quantenzahlen n, l und s sowie der Ausrichtung der Drehimpulse im
Raum gekennzeichnet durch ml und ms wieder.
6.2
6.2.1
Kernphysik
Aufbau von Atomkernen
Atomhülle: Elektronen eAtomkern: Nukleonen:
- Protonen p+
- Neutronen n
me = 9,1095 ⋅10-31 kg
re ≅ 2,8 fm
mp = 1,6726 ⋅10-27 kg
mn = 1,6748 ⋅10-27 kg
rp ≅ 1,2 fm
rn ≅ 1,2 fm
Allgemeine Bezeichnung verschiedener Atomkerne, Nuklide:
A
Z
XN
Z
N
A
Protonenzahl = Ordnungszahl (= Elektronenzahl)
Neutronenzahl
= Z + N Nukleonenzahl = Massenzahl
Isotope = Nuklide eines chem. Elements
Bsp.: H → 1H (Wasserstoff), 2H (Deuterium), 3H (Tritium)
Angabe der Massenzahl A mit Zeichen für chem. Element eindeutig.
Ausführlich:
1
1
H0
2
1
H1
3
1
H2
Massenzahl M (= Ar relative Atommasse) im Periodensystem der chem. Elemente ist
gewichteter Mittelwert entsprechend der natürlichen Häufigkeit. Bsp: Kohlenstoff:
M(C) = 98,90 % ⋅ M(12C) + 1,10% ⋅ M(13C) + 0,00% ⋅ M(14C) = 12,0107 [ u bzw. g/mol]
6.2.2
Radioaktiver Zerfall
Beobachtung: Atomkerne sind i.A. instabil, d.h. sie zerfallen
in andere Nuklide unter Abgabe von Strahlung
→ Natürliche Radioaktivität:
α - Strahlung: He-Kerne 4He2+
β - Strahlung: Elektronen eγ - Strahlung: Photonen hoher Energie (MeV)
→ Künstliche Radioaktivität:
Positronenstrahlung e+ , Protonenstrahlung p , Neutronenstrahlung n
PhI_M2
Hoeppe, 2009
- 55 -
A) Zerfallsgesetz
Ein (instabiler) Kern zerfalle mit Wahrscheinlichkeit λ, d.h. er habe eine mittlere
Lebensdauer τ = 1/λ. Messbar nur für große Zahl N von Kernen →
Aktivität einer Stoffmenge/Probe:
N (t ) = N 0 ⋅ e
= N0 ⋅ e
20
−
t
N [ 10
−λ ⋅t
]
dN = −λ ⋅ N ⋅ dt →
A:= λ⋅N
τ
Becquerel : 1 Bq =
32
28
24
20
16
12
8
4
0
1 Ereignis
s
T½ = 20
0
20
40
60
80
100
Zeit
Nach der Zeit t = T½ = τ⋅ln2 ist die Hälfte der Kerne zerfallen.
B) Zerfallsarten
α - Zerfall ( vorwiegend bei schweren Kernen )
A
Z
K
α
⎯
⎯→
A− 4
Z −2
K ∗ + 24He 2 +
β - Zerfall ( Neutron → Proton + Elektron )
A
Z
K
β
⎯⎯→
K ∗ + e−
A
Z +1
γ - Zerfall ( eigentlich Folgereaktion )
A
Z
K∗
γ
⎯
⎯→
K +γ
A
Z
Bsp.:
PhI_M2
Hoeppe, 2009
- 56 -
6.3
Kernenergie und Massendefekt
Die freiwerdenden Energien beim Kernzerfall, Kernspaltung oder Kernfusion
entspricht freiwerdender Bindungsenergie. Diese sind bei Atomkernen so groß,
dass sie sich entsprechend E = mc² in einem messbaren Massendefekt äußern.
Bsp.: Sauerstoff ist (letztlich aus Wasserstoff) durch Kernfusionsreaktionen im
Inneren von Sternen entstanden. Die dabei freigewordene Energie ’fehlt’ dem
Sauerstoffkern, weshalb er leichter ’als erwartet’ ist:
16
O besteht aus
8 Protonen
8 Neutronen
8 Elektronen
Summe:
8 x mp =
8 x mn =
8 x me =
8 x 1,67262 ⋅10-27 kg
8 x 1,67482 ⋅10-27 kg
8 x 0,00091 ⋅10-27 kg
26,7868 ⋅10-27 kg
Die Masse von 16O ist jedoch 16,1313 u = 26,6395 ⋅10-27 kg, d.h. kleiner!
Entscheidend ist die Summe der Bindungsenergien bzw. Massendefekte aller
beteiligten Nukleonen. Betrachtet man den Massendefekt pro Nukleon, lässt sich
leicht ablesen durch welche Prozesse Energie frei werden kann:
Massendefekt / Nukleon [ MeV ]
0
-1
-2
-3
Kernfusion
-4
Energiegewinn durch Kernspaltung
-5
-6
-7
-8
-9
-10
0
50
100
150
200
250
Nukleonenzahl = Massenzahl A
In obiger (schematischer) Darstellung lässt sich auch zeigen:
- Die leichten Elemente bis ~ 56Fe entstehen unter Energiegewinn
durch Kernfusion in Sternen.
( Anwendung: Fusionsreaktor, Wasserstoffbombe )
- Die schwereren Elemente entstehen unter Energieverbrauch wahrscheinlich
hauptsächlich während Supernova-Explosionen. (Eine Fusion von sehr vielen Nukleonen
zu einem schweren Kern wäre denkbar, ist aber viel zu unwahrscheinlich.)
Umgekehrt wird durch Kernspaltung (in mittelschwere Nuklide) Energie frei.
( Anwendung: Atomkraftwerke, Atombombe )
PhI_M2
Hoeppe, 2009
- 57 -