IV Drehbewegungen starrer Körper
Werbung

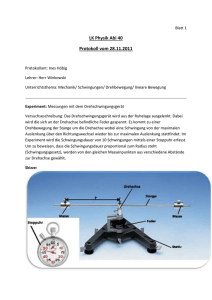
KAPITEL IV DREHBEWEGUNGEN STARRER KÖRPER 1. GRUNDBEGRIFFE 1.1 MODELL "STARRER KÖRPER" Bisher haben wir uns mit der Mechanik der Punktmassen beschäftigt; dabei meinen wir eigentlich nur die Bewegung des Massenmittelpunktes. Besonders bei technischen Anwendungen ist es aber oft wichtig, auch Ausdehnung und Gestalt der Körper zu berücksichtigen. Weil man dabei die Verformungen oft vernachlässigen kann, hat man das Modell des starren Körpers geschaffen. Er ist wie folgt definiert : Unter einem starren Körper versteht man ein Gebilde, dessen Ausdehnung und Gestalt sich nicht verändert. Jeder starre Körper kann man sich aus unendlich vielen Punktmassen zusammengesetzt denken. Es müssen sich daher seine Bewegungsgleichungen mit Hilfe der Mechanik der Punktmassen herleiten lassen. 1.2 TRANSLATION UND ROTATION Ein starrer Körper führt im Allgemeinen eine Translationsbewegung und eine Rotationsbewegung aus. Eine Translationsbewegung liegt vor, wenn der starre Körper bei seiner Bewegung die räumliche Orientierung relativ zu einem Inertialsystem beibehält. Im Folgenden werden wir nur Translationsbewegungen betrachten, bei denen sich der starre Körper längs einer Ebene verschiebt. die Bahnen der einzelnen Punktmassen sind dann kongruente Kurven, die in der gleichen Weise durchlaufen werden. Eine Rotationsbewegung liegt vor, wenn sich der starre Körper um einen festen Punkt relativ zu einem Inertialsystem dreht. In folgendem werden wir nur Rotationsbewegungen betrachten, bei denen sich der starre Körper um eine feste Achse dreht. Die Bahnen der einzelnen Punktmassen sind dann konzentrische Kreise, deren Mittelpunkte auf der festen Drehachse liegen. Dabei durchlaufen die Punktmassen die Bahnen mit unterschiedlicher Geschwindigkeit. 1.3 VEKTORIELLES UND SKALARES PRODUKT ZWEIER VEKTOREN a) Skalares Produkt Beim skalaren Produkt zweier Vektoren v1 und v2 ist das Produkt ein Skalar u . u v1 v2 Der Skalar u ist eindeutig durch seinen Betrag definiert : ist der Winkel zwischen v1 und v2 u v1 v2 cos STARRE KÖRPER 2 b) Vektorielles Produkt Beim vektoriellen Produkt zweier Vektoren v1 und v2 ist das Produkt ein Vektor v v1 v2 Der Vektor v ist eindeutig definiert durch seinen Betrag und seine Richtung : Betrag v v ist der Winkel zwischen v v1 v2 sin v. v1 und v2 Richtung Die Wirkungslinie steht senkrecht zur Ebene v1 , v2 . Der Richtungssinn ergibt sich aus der Regel des rechtsdrehenden Korkenziehers. Drehen wir den 1. Vektor v1 auf kürzestem Weg auf den 2. Vektor v2 , so schreitet der rechtsdrehende Korkenzieher in die positive Richtung des Produktvektors v vor. Die Reihenfolge der Vektoren im vektoriellen Produkt spielt eine Rolle. Die vektoriellen Produkte v1 v2 und v2 v1 haben zwar den gleichen Betrag und die gleiche Wirkungslinie aber unterschiedlichen Richtungssinn. 1.4 DREHMOMENT Der bereits in der 10. Klasse für den speziellen Fall des Hebels entwickelte Begriff des Drehmomentes soll jetzt verallgemeinert werden. Wir betrachten dazu einen starren Körper, der um eine feste Achse, die Drehachse, drehbar sein soll. An diesem Körper greift im Punkte A eine Kraft F ein, die in einer zur Drehachse senkrecht verlaufenden Ebene liegt. Diese Kraft bewirkt eine Dreh- oder Rotationsbewegung des Körpers. Das Drehmoment M ist definiert als das Produkt aus der Kraft F und dem senkrechten Abstand d ihrer Wirkungslinie von der Drehachse. Sei r die Entfernung des Angriffspunktes der Kraft von der Drehachse so gilt : M d f r sin F M r F sin Dies ist der Betrag des vektoriellen Produktes M r F . Unter dem Drehmoment M einer Kraft F , die in einer zur Drehachse senkrechten Ebene liegt, versteht man das vektorielle Produkt aus dem von der Drehachse zum Angriffspunkt der Kraft weisenden Vektor r und der Kraft F . M r F Für den Betrag des Drehmomentes gilt M r F sin . Die Richtung des Drehmomentes ist gegeben durch die Regel des rechtsdrehenden Korkenziehers. STARRE KÖRPER 3 1.5 Winkelgschwindigkeit Die Winkelgeschwindigkeit gibt den Winkel (in rad) an, um den sich der starre Körper in einer Sekunde dreht. Bei der gleichförmigen Kreisbewegung ist der Betrag der Winkelgeschwindigkeit konstant. Es gilt dann : t mit durchlaufener Drehwinkel in rad t verstrichene Zeit Dreht sich der starre Körper ungleichförmig um seine Achse, so kann man nur von der momentanen Winkelgeschwindigkeit sprechen : lim t 0 t d dt Um endlich auch noch die Richtung zu kennzeichnen, in welcher der starre Körper um seine Achse rotiert, stellt man die Winkelgeschwindigkeit als Vektor dar und legt sie so in die Drehachse, wie sich ein mit dem Körper rotierender Korkenzieher verschieben würde. Die Winkelgeschwindigkeit ist ein Vektor. Die Richtung von fällt mit der Drehachse zusammen und wird durch die Korkenzieherregel festgelegt. Sie hat stets gleiche Richtung wie das Drehmoment M . Der Betrag von ist gegeben durch t 0 t lim d . dt Die Einheit von ist 1 s-1 oder 1 rad/s . 1.6 Winkelbeschleunigung Die momentane Winkelbeschleunigung ist ein Vektor der gleichen Richtung wie die momentane Winkelgeschwindigkeit . gibt die Veränderung der Winkelgeschwindigkeit im Laufe der Zeit an. Es gilt daher : d lim t 0 t dt Die Einheit der Winkelbeschleunigung ist 1 s-2 oder 1 rad/s2 . 1.7 Rotationsenergie Beim Herunterrollen einer Kugel beschreibt der Schwerpunkt S eine geradlinig beschleunigte Translationsbewegung. Jeder Punkt P außerhalb des Schwerpunkts beschreibt eine Rotationsbewegung um den Schwerpunkt. Die Bewegungsenergie oder kinetische Energie EKIN der Kugel besteht demnach aus 2 Teilen : Translationsenergie ETRA 1 2 m v 2 Rotationsenergie EROT STARRE KÖRPER 4 Merke : Dreht sich ein Körper um seine Drehachse, ohne dass die Drehachse ihre Position ändert (Schleifscheibe, Schwungrad), so entfällt ETRA und EKIN EROT . Zur Berechnung der Rotationsenergie betrachten wir ein Körper der reibungsfrei um eine feste Achse dreht, so gilt demnach : E ROT EKIN Zur Berechnung stellen wir uns den Körper aus unendlich vielen Punktmassen m1 , m2 , m3 , ... , mn zusammengebaut. E ROT E ROT E KIN ,1 E KIN ,2 E KIN ,3 ... E KIN , n 1 1 1 1 1 2 m1v12 2 m112 r12 1 2 m1 2 r12 1 2 m1r12 m2 r22 m3 r32 ... mn rn2 2 1 m2 v22 2 2 n mr 2 i i 1 2 m3v32 ... 2 m222 r22 1 2 m2 2 r22 1 1 2 v r mn vn2 2 m332 r32 ... 1 2 m3 2 r32 ... 1 2 mnn2 rn2 2 mn 2 rn2 1 2 ... n 2 i 1 Den Ausdruck n mr i i 2 bezeichnet der Physiker als Trägheitsmoment J . Es folgt i 1 schlußendlich für die Rotationsenergie EROT : EROT 1 2 J 2 1.8 Trägheitsmoment Das Trägheitsmoment J ist ein Maß für das Sich Wehren eines starren Körpers gegen die Änderung seiner reinen Rotationsbewegung. J n m r 2 i i i 1 mi ri elementare Punktmasse Entfernung Punktmasse Drehachse Die Einheit des Trägheitsmoments ist 1 kgm2 . Das Trägheitsmoment hängt von der Masse und der Form des Körpers sowie von der Lage der Drehachse und dem Abstand Drehachse - Schwerpunkt ab. Die in der Literatur angegebenen Trägheitsmomente J S gelten nur wenn die Drehachse D durch den Schwerpunkt S des Körpers verläuft. Liegt die Drehachse außerhalb des Schwerpunktes, so ergibt sich ein größeres Trägheitsmoment J D , das sich mit dem Satz von Steiner berechnen lässt : JD J S m a2 mit a Entfernung Drehachse Schwerpunkt STARRE KÖRPER 5 Das Trägheitsmoment macht Körper träger. Ihr Widerstand gegen Änderung des Bewegungszustandes ist stets größer als der von vergleichbaren reibungsfrei gleitenden Körpern. Dies lässt sich anschaulich zeigen, wenn Körper gleicher Ausdehnung und gleicher Masse eine geneigte Ebene reibungsfrei hinabrollen bzw. hinabgleiten lässt : Hohlzylinder, Vollzylinder, Kugel und Quader. Bei den Rollkörpern wird die Lageenergie mgh auf die kinetische Energie der Translation des Schwerpunktes 1 2 mv2 und die Rotationsenergie Schwerpunkt aufgeteilt. Also gilt : 1 2 mv 2 1 2 J 2 1 2 mgh J 2 durch die Längsachse um den v r 2 1 v mgh 2 mv 2 J 2 r J 1 v2 m mgh 2 r2 2 1 2mgh J m 2 r v Man stellt fest, dass die am Fuße der geneigten Ebene erreichte Geschwindigkeit umso kleiner ist je größer das Trägheitsmoment des Körpers ist. Setzen wir in die Formel die Ausdrücke der Trägheitsmomente der einzelnen Körper ein, so erhalten wir : v 2 gh v 10gh 7 mr 2 2 v 4gh 3 J mr 2 v gh gleitender Körper : J 0 Kugel : J 2mr 2 5 Vollzylinder : J Hohlzylinder : STARRE KÖRPER 6