2 Grundgrößen und -gesetze der Elektrodynamik
Werbung

2
Grundgrößen und -gesetze der Elektrodynamik
2.1
Grundgrößen der Elektrodynamik
2.1.1
Ladung und die dreidimensionale δ -Distribution
Ladung
Q, q
Ladungen treten in zwei Variationen auf: positiv und negativ
Einheit: [Q] = C (Coulomb) – abgeleitete Größe: 1 C = 1 A sec
Elementarladung e = Betrag der Elektronenladung = 1.60×10−19 C
zur Entdeckung des Elektrons durch J.J. Thomson im Jahr 1897 siehe:
http://www.aip.org/history/electron/
Zwei ortsfeste Ladungen üben aufeinander die Coulomb-Kraft
F 12 =
1
q1 q2
(r − r 2 )
4π0 |r 1 − r2 |3 1
aus.
Dielektrizitätskonstante 0 = 8.85 × 10−12 C2 /(N m)
Superpositionsprinzip der Kräfte ⇒
Eine Ladungsverteilung ρ(r 0 ) übt auf eine Ladung q am Ort r die Coulomb-Kraft
F (r) =
q
4π0
Z
ρ(r 0 )
(r − r 0 ) dV 0
|r − r0 |3
aus.
Ladungsdichte
ρ(r)
V
QV
Q∆V
(r)
∆V →0 ∆V
ρ(r) = lim
r
Ladungsdichte ρQ einer Punktladung – dreidimensionale δ -Distribution
Ladungsdichte muß 2 Kriterien erfüllen:
(a) lim
Z
q
(b)
4π0
Z
∆V →0 ∆V
ρQ (r)dV = Q
ρQ (r0 )
Q
q
(r − r0 ) dV 0 =
(r − r Q )
0
3
|r − r |
4π0 |r − r Q |3
Bedingung (a) kennzeichnet ρQ (r) als nicht stetig-integrierbare Funktion
(sonst würde – nach Mittelwertsatz – das Integral proportional zu ∆V verschwinden)
Versuche, ρQ anzunähern:
Betrachte dreidimensionale Gauss-Verteilung:
fG3 (r, σ) = fG (x, σ)fG (y, σ)fG (z, σ),
wobei
fG (x, σ) = √
1
x2
exp(− 2 ).
2σ
2πσ
x2 + y 2 + z 2
1
exp(−
)
(2π)3/2 σ 3
2σ 2
1
r2
=
exp(−
).
(2π)3/2 σ 3
2σ 2
(1)
⇒ fG3 (r, σ) =
(2)
Die dreidimensionale Gauss-Verteilung erfüllt die Normierungsbedingung:
Z
R3
fG3 (r, σ) = 1.
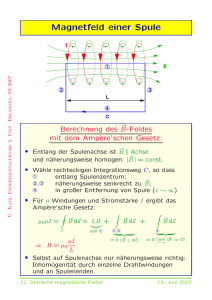
fG3 (r, σ) wird immer schärfer um r konzentriert
σ → 0:
σ=1
σ = 0.3
0.25
0.25
0.2
0.2
0.15
0.15
0.1
0.1
0.05
0-5
5
2.5
-2.5
0
0
2.5
-2.5
5 -5
0.05
0-5
5
2.5
-2.5
0
0
2.5
-2.5
5 -5
Betrachte daher:
lim lim
Z
∆V →0 σ→0 ∆V
fG3 (r, σ)dV
r
4π
r0 2
02
= lim lim
r exp(− 2 ) dr 0
r→0 σ→0 (2π)3/2 σ 3 0
2σ
Z r/σ
4π
x2
3 2
= lim lim
) dx
σ
x
exp(−
r→0 σ→0 (2π)3/2 σ 3 0
2
4π Z ∞ 2
x2
) dx
x
exp(−
= lim
r→0 (2π)3/2 0
2
Z
(3)
(4)
=1
(5)
⇒ lim fG3 (r, σ) erfüllt Kriterium (a) an ρQ (r)
σ→0
Erfüllt sie auch Kriterium (b)?
Betrachte dazu:
Z
1
(r 0 − a)2
0
g(r
)
exp(−
) dV 0
σ→0 (2π)3/2 σ 3
2σ 2
Z
r0 2
1
0
g(r + a) exp(− 2 ) dV 0
= lim
σ→0 (2π)3/2 σ 3
2σ
(6)
lim
(7)
Wegen (a) kann man das Integrationsvolumen auf ein infinitesimales ∆V einschränken:
=
1
∆V →0 σ→0 (2π)3/2 σ 3
lim lim
Z
∆V
1
= lim g(a + η) lim
σ→0 (2π)3/2 σ 3
∆V →0
=
Z
|
g(a)
r02
) dV 0
2σ 2
r0 2
exp(− 2 ) dV 0
2σ
g(r0 + a) exp(−
∆V
{z
1
}
(8)
(9)
(10)
Hierbei wurde benutzt, daß η ∈ ∆V liegen muß und damit η → 0.
lim fG3 (r, σ) (lim-Bildung erst nach Integration) erfüllt somit die Kriterien (a) und (b)
der Ladungsverteilung einer Punktladung.
σ→0
Verteilungen (Distributionen) δ(r), die die Bedingungen
Z
Z
δ(x)dx = 1
δ(x − a)f (x)dx = f (a)
erfüllen, bezeichnet man als Darstellungen der δ-Distribution.
Mit lim fG3 (r, σ) haben wir eine Darstellung der dreidimensionalen δ-Distribution kenσ→0
nengelernt:
lim fG3 (r, σ) = δ(r) = δ(x)δ(y)δ(z)
σ→0
2.1.2
Weitere Grundgrößen der Elektrodynamik
Elektrisches Feld
E
Das elektrische Feld E(r) ist an jedem Punkt des Raumes definiert als der Quotient
aus der Kraft, die an diesem Punkt auf eine ruhende Punktladung wirkt, und der
Ladung der Punktladung:
E(r) =
F (r)
q
V = J
Einheit der elektrischen Feldstärke: [E] = m
C m
elektrischer Strom
(V: Volt)
I
Der elektrische Strom I in einem Leiter ist definiert als die Ladung, die pro Zeiteinheit
durch die Querschnittsfläche des Leiters fließt.
C = A
Einheit des Stroms: [I] = sec
Stromdichte
(A: Ampère)
j
S
I∆F
∆F →0 ∆F
j(r) = lim
Magnetische Induktion
r
IS
B
Die magnetische Induktion am Ort r ist definiert durch den Quotienten aus der Kraft,
die pro Längeneinheit an diesem Punkt auf einen ungeladenen, stromdurchflossenen
Leiter wirkt, und dem durch den Leiter fließenden Strom.
Einheit der magnetischen Induktion [B] = T =
N
Am
(T: Tesla)
Solange keine Gefahr der Verwechslung besteht, werden wir die magnetische Induktion auch magnetisches Feld bezeichnen.
2.1.3
Maxwell’sche Gleichungen und Einheiten
SI
Gauss
1
∇·E = ρ
0
∇ × E = − ∂B
∂t
∇ × B = µ 0 j + µ 0 0
∇ · E = 4πρ
∇ × E = − 1c ∂B
∂t
∂E
∂t
∇×B =
∇·B =0
F = q(E + v × B)
4π
j
c
+
1 ∂E
c ∂t
∇·B = 0
F = q(E + vc × B)
0 = 8.85 × 10−12 C2 /(N m)
µ0 = 4π × 10−7 N/A2
Gauss’sche Einheiten: E und B haben die gleiche Einheit
- spiegelt ihre Symmetrie wider (Lorentz-Tranformation).
Umwandlung von Formeln: Skalieren der Größen
ESI = kE EG
ρSI = kρ ρG
BSI = kB BG
jSI = kj jG
mechanische Größen stimmen überein: FSI = FG
c = 3 × 108 m/s
⇒ µ0 0 = c−2
√
−1
kE = 4π0
√
kj = kρ = 4π0
kB =
q
µ0
4π
Umwandlung zwischen Einheiten: beachte die Umwandlung der Längen- und Masseneinheiten!
[lengthSI ] = m = λ1 cm = λ1 [lengthG ]
[massSI ] = kg = λ2 g = λ2 [massG ]
Beispiel:
Berechnen Sie den Umwandlungsfaktor zwischen den Einheiten der Ladung
Ausgangspunkt: potentielle Energie
SI →
⇒
2
qSI
4π0 rSI
J
=
=
2 k2
qG
ρ
dyn
4π0 rG
2
qG
dyn
rG
2
qSI
2
qG
← G
rSI dyn
4π0
rG
J
107
= 10−2 · 10−7 · 2
c
=
Verhältnis zwischen den Zahlenwerten!!
⇒
Größe
Q
E
I
B
Einheit in SI
C
V/m = J/(C m)
A = C/sec
T = N/(A m)
1/C
1
= × 10−9
1/esu
3
Factor
3 × 109
1
× 10−4
3
3 × 109
104
Einheit in Gauss
esu
statV/cm
esu/sec
Gauss
2.2
Grundgesetze der Elektrodynamik im Vakuum
Maxwell Gleichungen
Gauss’sches Gesetz
I
1
∇·E = ρ
0
∂V
E · df =
QV
0
Faraday’sches Gesetz
∂B
∇×E =−
∂t
I
∂S
E · d` = −
d Z
B · df
dt S
Ampère’sches Gesetz
∂E
∇ × B = µ 0 j + µ 0 0
∂t
I
d
B · d` = µ0 IS + µ0 0
dt
∂S
∇·B =0
I
∂V
Z
S
E · df
B · df = 0
0 = 8.85 × 10−12 C2 /(N m2 ), µ0 = 4π × 10−7 N/A2
Die Maxwell’schen Gleichungen beschreiben die Dynamik der elektro-magnetischen
Felder. Sie geben keine Auskunft über die Bewegung der Ladungen unter dem
Einfluß der Felder.
Lorentz-Kraft
F = q(E + v × B)
Die Lorentz-Kraft beschreibt die Dynamik der Ladungen unter dem Einfluß der
Felder. Sie gibt keine Auskunft über die Änderung der Felder veränderlicher Ladungsund Stromverteilungen.
2.2.1
Gauss’sches Gesetz
∇·E =
1
ρ
0
integriere über das Volumen V :
Z
Gauss-Theorem:
∇ · EdV =
V
I
∂V
1
0
E · df =
Z
V
ρdV
1
QV
0
E
Gauss’sches Gesetz:
Der Fluß des elektrischen Feldes durch eine
geschlossene Oberfläche S = ∂V gleicht QV /0 ,
wenn QV die von der Fläche eingeschlossene
Ladung bezeichnet.
2.3
Faraday’sches Gesetz
∇×E =−
∂B
∂t
integriere über Fläche F l
Z
Fl
(∇ × E) · df = −
Z
Fl
∂B
· df
∂t
Stokes’sches Theorem - konstante Fläche
I
∂ Z
E · d` = −
B · df
∂t F l
∂F l
Uind = −
∂
d
Φ(t) = − Φ
∂t
dt
Q
Faraday’sches Gesetz:
Die zeitliche Änderung eines magnetischen Feldes
erzeugt elektrische Wirbelfelder.
Lenz’sche Regel:
Wird durch die zeitliche Änderung des magnetischen Flußes in einer Leiterschleife ein Strom induziert, so fließt er in die Richtung, in der das von
ihm erzeugte Feld, der äußeren Feldänderung entgegenwirkt.
2.3.1
B(t)
E
U
Fl
Ampère’sches Gesetz
∇ × B = µ 0 j + µ 0 0
∂E
∂t
Integriere über Fläche F l
Z
Fl
(∇ × B) · df = µ0
Z
j · df + µ0 0
Z
Fl
∂E
· df
∂t
Stokes’sches Theorem – fester Weg
I
∂ Z
B · d` = µ0 IF l + µ0 0
E · df
∂t F l
∂F l
Ampère’sches Gesetz:
a) Lokale Ströme und zeitlich veränderliche elektrische Felder erzeugen magnetische
Wirbelfelder.
b) Das Integral über die Tangentialkomponente von B entlang eines jeden geschlossenen Weges ist proportional zum Strom IF l , der durch die von dem Weg begrenzte
Fläche fließt und proportional zur zeitlichen Änderung des elektrischen Flusses durch
diese Fläche.
Fehlen magnetischer Ladungen
∇·B =0→
Z
dV →
I
B · df
Es gibt keine magnetischen Ladungen (Monopole). Daher beginnen oder enden
magnetische Feldlinien nicht in einzelnen Raumpunkten (Quellen oder Senken des
Feldes), sondern formen geschlossene Schleifen.
Superpositionsprinzip
Die Maxwell’schen Gleichungen sind sowohl linear in den “Quellen” (Ladungen,
Ströme) als auch in den Feldern selbst. Dadurch ist das Superpositionsprinzip
gewährleistet.
Beispiel:
Feld einer Punktladung am Ort Ri :
E i (r) =
1
qi
(r − Ri )
4π0 |r − Ri |3
Dies Feld ist rotationsfrei und genügt der Gleichung:
1
qi δ(r − Ri )
0
∇ · Ei =
Das Feld, das von verschiedenen Punktladungen am Ort r erzeugt wird, ist:
E(r) =
X
E i (r)
i
1
qi
(r − Ri )
3
i 4π0 |r − Ri |
Z
X qi δ(r0 − Ri )
1
dV 0
(r − r 0 )
=
0 |3
4π0
|r
−
r
i
Z
ρ(r 0 )
1
0
dV
(r − r 0 )
=
0
3
4π0
|r − r |
=
Wegen ∇ · E =
1
q δ(r
0 i
X
− Ri ) ergibt sich sofort, dass
∇ · Ei = ∇ ·
X
i
Ei =
X
i
∇ · Ei =
X
i
1
qi δ(r − Ri )
0
2.4
Helmholtz-Theorem
Die Maxwell’schen Gleichungen sind Bewegungsgleichungen für die elektro-magnetischen
Felder. Aber legen die Maxwell’schen Gleichungen auch den räumlichen Verlauf der
Felder E und B eindeutig fest?
Als räumliches Problem betrachtet, geben die Maxwell-Gleichungen sowohl die Rotation als auch die Divergenz der Felder vor.
Sei also
∇ · F = D und ∇ × F = C,
wobei aus Konsistenzgründen ∇ · C = 0 sein muß.
Reichen diese Vorgaben aus, um F (r) eindeutig zu bestimmen?
Betrachte folgenden Ansatz:
F = −∇U + ∇ × W
und wähle
U (r) =
1 Z D(r0 )
dV 0
4π V |r − r 0 |
Z
1
C(r0 )
dV 0
W (r) =
0
4π V |r − r |
Die Integration erstrecke sich dabei über den ganzen Raum.
Überprüfe nun, ob ∇ · F = D und ∇ × F = W .
1. ∇ · F
∇ · F = −∇ · (∇U ) + ∇ · (∇ × W ) = −∆U
2.4.1
1
Exkurs: ∆ −
r
– eine weitere Darstellung der δ -Distribution
∇·(
1
e ) = 0 für alle r 6= 0.
r2 r
1
1
1
∆ −
= −∇ · (∇ ) = ∇ · ( 2 er )
r
r
r
Nun ist
(Übungsaufgabe)
Andererseits gilt nach dem Gauss’schen Theorem
Z
V
1
∇ · ( 2 er ) =
r
I
∂V
1
e df .
r2 r
Wähle als Integrationsvolumen eine um r = 0 zentrierte Kugel mit Radius R:
⇒
I
∂V
1
e df =
r2 r
Z
dΩR2
1
= 4π
R2
(dΩ = sin ϑdϑdφ: Raumwinkelelement)
−1 1
∆ dV = 1
∆V →0 4π
r
⇒ lim
−1 1
∆ die erste Bedingung an eine Darstellung der δ-Distribution.
4π r
Die zweite Bedingung verlangt, dass
Z
−1
f ∆ dV = 4πf (0).
r
Damit erfüllt
Es gilt: f (∇ · A) = ∇ · (f A) − A · (∇f )
⇒
Z
f∇ ·
er
dV
r2
=
=
=
→
ε→0
Z
er
)dV −
r2
Z
er
· (∇f )dV
r2
I
Z
er
r 2 dΩdr
f 2 · df − (er · ∇f )
r2
∂Vε r
Vε
I
∇ · (f
f (ε)dΩ −
Z
ε
0
dr
Z
(er · ∇f )dΩ
4πf (0)
Damit haben wir eine weitere Darstellung der dreidimensionalen δ-Distribution gefunden.
Nun zurück zur Berechnung von ∇ · F :
Beachte, dass die Differentiation bezüglich r erfolgt, die Integration hingegen bezüglich
r0 .
1 Z
1
1 Z
0
dV = −
∇·F = −
D∆
D(r0 )[−4πδ(r − r 0 )]dV 0
0
4π V
|r − r |
4π V
= D(r)
Ok! Jetzt die Rotation . . .
∇×F
∇ × F = ∇ × ∇(−U ) + ∇ × (∇ × W ) = −∆W + ∇(∇ · W )
Nun ist
1
−∆W = −
4π
Z
V
1
C∆(
)dV 0 =
0
|r − r |
Z
V
C(r0 )δ(r − r0 )dV 0 = C(r).
Fein! Aber es bleibt ein Rest:
Z
Z
1
1
0
4π∇ · W =
C · ∇(
)dV = − C · ∇0 (
)dV 0
0
0
|r − r |
|r − r |
V
V
I
Z
1
1
∇0 · CdV 0 −
C · df 0
=
0
0
|
|
|r
−
r
|r
−
r
∂V
V
Der erste Term verschwindet, da ∇ · C = 0.
Das Oberflächenintegral liegt im Unendlichen. Es verschwindet, wenn C im Unendlichen schnell genug abfällt. Das ist aber ohnehin notwendig, da sonst die Integrale U und W nicht konvergieren.
Wir haben somit eine Lösung F des Problems gefunden.
eindeutig?
Ist diese Lösung aber
Sie ist nur dann eindeutig, wenn wir verlangen, dass das Feld F im Unendlichen
verschwindet. Andernfalls kann man ein Vektorfeld mit verschwindender Divergenz
und verschwindender Rotation zu F addieren.
Das Ergebnis wird im Helmholtz-Theorem zusammengefaßt:
Jedes Vektorfeld F (r) ist durch seine Quellen ∇ · F = D und seine Wirbel ∇ × F =
1
C festgelegt, wenn die Quellen- und Wirbelfelder im Unendlichen schneller als 2
r
abfallen. Verschwindet F seinerseits im Unendlichen, dann ist F eindeutig durch
F = −∇U + ∇ × W
mit
und
festgelegt.
1
U (r) =
4π
Z
1
W (r) =
4π
Z
V
V
D(r0 )
dV 0
0
|r − r |
C(r0 )
dV 0
|r − r 0 |