Kinematik
Werbung

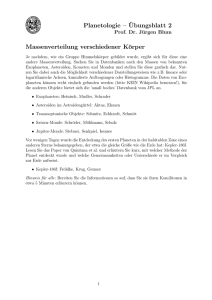
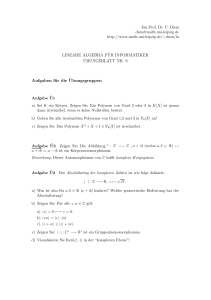
Kinematik Die Kinematik (kinema, griech., Bewegung) ist die Lehre von der Bewegung von Punkten und Körpern im Raum, beschrieben durch die Größen Weg (Änderung der Ortskoordinate) s, Geschwindigkeit v und Beschleunigung a, ohne die Ursachen einer Bewegung (Kräfte) zu betrachten. Sie ist wie die Dynamik, die sich jedoch mit der Bewegung von Körpern unter Einwirkung von Kräften beschäftigt, ein Teilgebiet der Mechanik. (Wikipedia, 5.11.2006) Die Beschreibung der Bewegung eines Körpers durch seine Bahn s(t) erfordert es, den betrachteten Körper auf einen einzigen Punkt zu reduzieren. Modell der Punktmasse Massenpunkt oder Punktmasse beschreibt in der Physik die höchstmögliche Idealisierung eines realen Körpers. Der Massenpunkt ist ein physikalisches Modell, das den Körper ausschliesslich hinsichtlich seines Ortes und seiner Masse vertritt. Er dient zur vereinfachten Beschreibung der Bewegung des Körpers. Äußere Eigenschaften wie Volumen und Form werden vernachlässigt. Der Körper wird als mathematischer Punkt angesehen, der somit keine Ausdehnung, aber eine endliche Masse besitzt. Insbesondere besitzt ein Massenpunkt keine Rotationsfreiheitsgrade. Falls bei einem realen, ausgedehnten Körper eine eventuelle Rotationsbewegung und die Verteilung der Masse im Körpervolumen nicht interessieren, kann er als Massenpunkt (am Ort des Körperschwerpunkts) betrachtet werden. (Wikipedia, 5.11.06) Bewegt sich ein Körper entlang einer geraden Linie, so sprechen wir von einer eindimensionalen Bewegung. Der entsprechenden Punktmasse kann dann zu jedem Zeitpunkt t eine Ortskoordinate s zugeordnet werden. Die Bahn s(t) ist die Gesamtheit all dieser Ortskoordinaten. Sie gibt an, wo sich der Körper zu einem beliebigen Zeitpunkt t aufhält. Die Grundgleichungen der Kinematik lauten: Grundgleichungen der Kinematik v (t) =ṡ(t) (Momentan-)Geschwindigkeit a(t) =v̇ (t) = s̈(t) (Momentan-)Beschleunigung Die momentane Geschwindigkeit v des Massepunktes zur Zeit t ist gegeben durch die zeitliche Ableitung seiner Bahnkoordinate: ∆s(t) s(t + ∆t) − s(t) ds(t) d = lim ≡ = s(t). ∆t→0 ∆t ∆t→0 ∆t dt dt v (t) = ṡ(t) = lim (Bemerkung: In der Physik ist die sog. Differentialdarstellung von Ableitungen sehr gebräuchlich, da in ihr die Substitutionsregeln besonders intuitiv deutlich werden.) 50 s(t) v(t) 40 v [m/s] s [m] 30 20 10 0 -10 0 2 4 6 8 10 t [s] s(t) = s0 + v0 t + A sin(ω(t − t0 )) Beispiel: s(t) = s0 + v0 t + A sin(ω(t − t0 )) ⇒ v (t) = 0 + v0 + ωA cos(ω(t − t0 )) (1) Wir haben im vorigen Beispiel zu einer vorgegebenen Bahn s(t) die Geschwindigkeit des Körpers bestimmt. Die Gleichung v = ṡ erlaubt aber auch, bei vorgegebener Geschwindigkeit v (t) die Bahnkurve s(t) zu berechnen. Beispiel: aus Herrn Wurth’s/Herrn Rossbach’s Vorlesung: ein Körper bewegt sich mit konstanter Geschwindigkeit v0 . Behauptung: Seine Bahngleichung lautet s(t) = s0 + v0 t Überprüfung: d (s0 + v0 t) = v0 dt Was aber, wenn die Geschwindigkeit des Teilchens nicht konstant ist? v (t) = ṡ(t) = Benutzen wir die Definition: v (t) = s(t + dt) − s(t) dt dt infinitesimal klein und starten bei einem Zeitpunkt t0 ⇒ s(t0 + dt) = s(t0 ) + v (t0 )dt Das können wir noch ein wenig weitertreiben: s(t + 2dt) = s(t + dt) + v (t0 + dt)dt = s(t0 ) + v (t0 )dt + v (t0 + dt)dt (2) = s(t0 ) + (v (t0 ) + v (t0 + dt)) dt Wollen wir die Koordinate des Teilchens zu einem endlich späteren Zeitpunkt wissen, müssen alle infinitesimalen Zeitschritte aufsummiert werden: Z t0 +∆t X s(t0 + ∆t) = s(t0 ) + v (t0 + ndt)dt → s(t0 ) + v (t)dt t0 n Bei vorgegebener Geschwindigkeit können wir also die Bahn des Teilchens berechnen: Z t s(t) = s(t0 ) + v (t 0 )dt 0 . t0 Man sieht aber auch: um aus der Geschwindigkeit auf die Bahn des Teilchens zu schließen, benötige ich einen Startwert oder auch einen Anfangswert der Bewegung, s(t0 . Beispiel: Betrachten wir noch einmal die Bewegung mit konstanter Geschwindigkeit. Dann gilt: v (t) = v0 und wir setzten den Startzeitpunkt zu t0 = 0 Z s(t) = s0 + t v0 dt 0 = s0 + v0 t. 0 Auch unser Beispiel von vorhin können wir auf diese Weise überprüfen: Aus der Geschwindigkeit v (t) = v0 + Aω cos(ω(t − t0 )) erhalten wir Z s(t) = s(t = 0) + t [v0 + Aω cos(ω(t − t0 ))] dt 0 0 (3) = s0 + v0 t + A sin(ω(t − t0 )). Jetzt können wir uns dem zweiten Grundgesetz der Kinematik zuwenden: a(t) = v̇ (t) Die momentane Beschleunigung, die ein Massepunkt erfährt, ist gleich der zeitlichen Ableitung seiner Geschwindigkeit. Es gilt also: a(t) = v̇ (t) = d ṡ(t) = s̈(t) dt Betrachten wir gleich noch einmal unser Beispiel: 50 s(t) v(t) a(t) 40 v [m/s] s [m] 30 20 10 0 -10 0 2 4 6 t [s] v (t) = v0 + Aω cos(ω(t − t0 )). 8 10 Die Beschleunigung des Teilchens ergibt sich somit zu d v (t) = Aω [ω(− sin(ω(t − t0 )))] dt = −Aω 2 sin(ω(t − t0 )). a(t) = (4) Auch hier können wir die Beziehung a(t) = v̇ (t) umkehren. Analog zu Z t s(t) = s(t0 ) + v (t 0 )dt 0 t0 gilt nun t Z v (t) = v (t0 ) + a(t 0 )dt 0 t0 Beispiel: Ein Punktteilchen hat zum Zeitpunkt t = 0 eine Anfangsgeschwindigkeit v0 und erfährt eine konstante Beschleunigung a0 . Dann ist seine Geschwindigkeit gegeben durch Z v (t) = v0 + t a0 dt 0 = v0 + a0 t 0 In der Tat können wir nun aus dieser Beziehung auch die Bahn des Teilchens berechnen. Setzen wir nämlich v (t 0 ) in die obere Gleichung ein, so erhalten wir: Z t 1 s(t) = s0 + v0 + a0 t 0 dt 0 = s0 + v0 t + a0 t 2 2 0 Im allgemeinen Fall erhalten wir ganz analog # Z t" Z t0 a(t 00 )dt 00 dt 0 s(t) = s(t0 ) + v (t0 ) + t0 t0 Z t "Z t0 = s(t0 ) + v (t0 )(t − t0 ) + t0 t0 # a(t 00 )dt 00 dt 0 . (5)