Gleichstrommotor - antriebstechnik.fh
Werbung

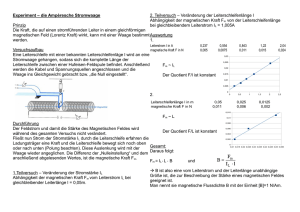
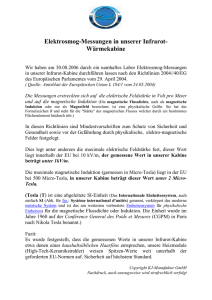
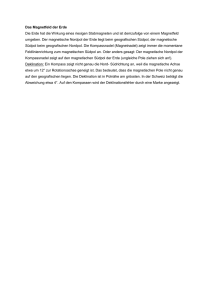
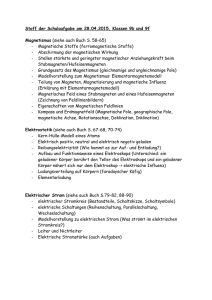
ET III Skript zum Laborversuch Gleichstrommaschine Jan Hanno Carstens Michael Kocur Literaturverzeichnis i 1. Inhaltsverzeichnis 1. Inhaltsverzeichnis ............................................................................................................... i 2. Literaturverzeichnis ..........................................................................................................ii 3. Allgemeines über Gleichstrommaschinen........................................................................ 1 3.1. Aufbau und Bauteile...................................................................................................... 1 4. Theoretische Grundlagen elektrischer Maschinen ......................................................... 2 4.1. Der magnetische Kreis .................................................................................................. 2 4.1.1. Magnetische Größen............................................................................................... 2 4.1.2. Durchflutungsgesetz ............................................................................................... 3 4.1.3. Analogie zum Ohmschen Gesetz............................................................................ 4 4.1.4. Zusammenfassung der wichtigsten Größen und ihrer Einheiten ............................ 4 4.2. Grundlagen der Gleichstrommaschine .......................................................................... 5 4.2.1. Induktionsgesetz (Generatorprinzip) ..................................................................... 5 4.2.2. Lorentzkraft (Motorprinzip) .................................................................................. 5 5. Gleichungen der Gleichstrommaschine ........................................................................... 6 5.1. Berechnung der induzierten Spannung.......................................................................... 6 5.2. Berechnung des Drehmoments...................................................................................... 7 6. Schaltungsarten.................................................................................................................. 9 7. Feldverlauf bei verschiedenen Erregungszuständen .................................................... 10 7.1. Hauptfeld..................................................................................................................... 10 7.2. Ankerfeld..................................................................................................................... 10 7.3. Betriebsfeld ................................................................................................................. 12 7.4. Ankerrückwirkung ...................................................................................................... 12 7.5. Aufhebung der Ankerrückwirkung ............................................................................. 13 8. Magnetische Meßmethoden ............................................................................................ 14 9. Drehzahlsteuerung........................................................................................................... 16 9.1. Drehzahlsteuerung durch Variation des Vorwiderstandes .......................................... 17 9.2. Drehzahlsteuerung durch Änderung der Ankerspannung ........................................... 17 9.3. Drehzahlsteuerung durch Änderung des Flusses......................................................... 18 10. Versuchsdurchführung ................................................................................................ 20 10.1. Versuchsaufbau........................................................................................................ 20 10.2. Vorbereitungsfragen zum Versuch .......................................................................... 20 10.3. Messungen ............................................................................................................... 21 10.3.1. Ankerwiderstand................................................................................................... 21 10.3.2. Feldverlauf der Induktion ..................................................................................... 21 10.3.3. Feldschwächung ................................................................................................... 21 10.3.4. Drehzahlkennlinien............................................................................................... 21 11. Auswertung ................................................................................................................... 22 11.1. Leerlaufversuch (zu 10.3.3) ..................................................................................... 22 11.2. Berechnung der Eisen- und Reibungsverluste im Nennpunkt (zu 10.3.3)............... 22 11.3. Bestimmung des Wirkungsgrades (zu 10.3.3) ......................................................... 22 11.4. Feldverläufe (zu 10.3.1)........................................................................................... 23 11.5. Maschinenkonstante (zu 10.3.3) .............................................................................. 23 11.6. Berechnung von Anlaufwiderständen...................................................................... 23 11.7. Drehmoment-Drehzahlkennlinien: n = f (M) ........................................................... 24 Literaturverzeichnis ii 2. Literaturverzeichnis R. Hanitsch Skript zur Vorlesung „Grundzüge der Elektrotechnik III“ W. Nürnberg, R. Hanitsch Die Prüfung elektrischer Maschinen Springer-Verlag, Berlin; Heidelberg; New York, 1987 G. Müller Elektrische Maschinen, Grundlagen, Aufbau und Wirkungsweise, Verlag Technik, Berlin, 1990 G. Müller Betriebsverhalten rotierender elektrischer Maschinen Verlag Technik, Berlin, 1990 R. Fischer Elektrische Maschinen Carl Hansa Verlag, München; Wien, 1992 J. Vogel Elektrische Antriebstechnik Verlag Technik, Berlin, 1991 Skript zum Laborversuch GM 1 3. Allgemeines über Gleichstrommaschinen Die Gleichstrommaschine war der erste elektromechanische Energiewandler. Der Franzose H. Pixii baute bereits im Jahr 1832 den ersten Generator für zweiwelligen Gleichstrom. Die Entwicklung ging weiter über Motoren mit Ringwicklung und vielteiligem Stromwender zum 1872 erfundenen Trommelanker. Auch W. Siemens leistete im Jahr 1866 einen wesentlichen Beitrag mit der Entdeckung des elektrodynamischen Prinzips. Er schaffte die Voraussetzungen für den Großmaschinenbau. Mit der Einführung des Drehstroms verlor die Gleichstrommaschine ihre beherrschende Stellung an Synchrongeneratoren und Induktionsmotoren. Durch die Entwicklung der Stromrichtertechnik behauptete die Gleichstrommaschine aber einen bedeutenden Marktanteil im Bereich der drehzahlgeregelten Antriebe. Der Fertigungsbereich reicht von Kleinstmotoren für die Feinwerktechnik bis zu Großmaschinen. Dauermagneterregte Motoren bis ca. 100W werden in großer Stückzahl in der KfzElektrik als Scheibenwischer-, Gebläse- und Stellmotoren eingesetzt. Im Bereich der Servoantriebe bis zu Leistungen von einigen kW gibt es auch eine Reihe spezieller Bauformen wie Scheibenläufer- oder Glockenankermotoren. Auf dem Gebiet der Industrieantriebe sind der Einsatz in Werkzeugmaschinen, Förderanlagen, Walzstraßen und als Fahrmotor in Nahverkehrsbahnen zu erwähnen. Die größten Motoren erreichen bei Spannungen von unter 1500V Leistungen von ca. 10 000 kW. 3.1. Aufbau und Bauteile Eine Gleichstrommaschine (GM) besteht aus einem feststehenden Teil, dem Ständer, und einem sich drehenden Teil, dem Läufer. Der Ständer, auch Stator genannt, hat die Aufgabe ein feststehendes Magnetfeld zu erzeugen. Dies erfolgt bei einer fremderregten GM mit einer Erregerwicklung, die von den Hauptpolen getragen wird. Die Hauptpole bestehen aus dem Polkern und dem Polschuh, meist aus Elektroblech hergestellt. Bei mittleren und größeren Maschinen sind zwischen den Hauptpolen die Wendepole mit der Wendepolwicklung angeordnet. Der Läufer wird auch Anker oder Rotor genannt und besteht aus einer Welle, dem Blechpaket, der Ankerwicklung und dem Stromwender, der auch Kommutator genannt wird. Die Läuferwelle ist oft mit Hilfsaggregaten verbunden wie z. B. einem Tachogenerator zur Messung der Drehzahl. Am Stromwender ist die Ankerwicklung angeschlossen. Der Stromwender besteht aus einzelnen Lamellen aus Hartkupfer, die voneinander mit Glimmer isoliert sind. Diese Lamellen sind durch Gießharz oder durch eine mechanische Preßkonstruktion zusammengehalten. Die Verbindung mit der Ankerwicklung wird an den Stromwenderlamellen durch Löten hergestellt. Am Ständer der GM ist ein Bürstenapparat angebracht, der zur Aufnahme der sogenannten Bürsten dient. Das sind Schleifstücke aus Kohle oder Graphit. Die Bürsten können mit verstellbarem Druck auf der Umfangsfläche des Stromwenders gleiten. Sie übernehmen die Stromzufuhr in die Ankerwicklungen. Der Stromwender polt zusammen mit den Kohlebürsten die induzierte Spannung bei der Drehung der Maschine immer so um, daß an den Kohlebürsten eine gleichgerichtete Spannung abgegriffen bzw. angelegt werden kann. Skript zum Laborversuch GM 2 Bild 1: Prinzipieller Aufbau einer Gleichstrommaschine 1. 2. 3. 4. 5. 6. 7. Jochring Hauptpol Erregerwicklung Ankerblechpaket Ankerwicklung Stromwender Kohlebürsten 4. Theoretische Grundlagen elektrischer Maschinen 4.1. Der magnetische Kreis 4.1.1. Magnetische Größen Für die anschauliche Beschreibung der mathematischen und physikalischen Größen und Begriffe des magnetischen Feldes benutzen wir nach Faraday die Vorstellung des von Kraftlinien erfüllten magnetischen Raumes. Leiter I Feldlinien Bild 2: Feldlinien um einen stromdurchflossenen Leiter Skript zum Laborversuch GM 3 Einen magnetisch durchsetzten Raum nennen wir ein Magnetfeld. Nach der Faraday’schen Vorstellung entspricht die Gesamtzahl aller Feldlinien, die z.B. von einer Spule erzeugt werden, dem magnetischen Fluß Φ. In unserer Modellvorstellung ist die Dichte der Feldlinien proportional zur Größe des Magnetfeldes. Die Größe und die Richtung des Magnetfeldes werH den durch den Vektor B charakterisiert, magnetische Induktion oder magnetische Flußdichte genannt. Dann ist der Fluß Φ das Flächenintegral der Flußdichte B über die Fläche A. H H Φ = ò B dA A Ein magnetisches Feld wird von elektrischen Strömen erzeugt, der elektrische Strom ist also die magnetische Erregung. Wir denken uns diese Erregung auf das ganze Feld verteilt und schreiben die Felddichte an jeder Stelle des Feldes einer dort herrschenden magnetischen Erregung, der magnetischen Feldstärke H, zu. Führen wir ferner mit µ die magnetische Durchlässigkeit oder Permeabilität ein, so können wir schreiben: Vs µ 0 = 0,4 ⋅ π ⋅ 10 −6 Am µ r ist abhängig vom durchflossenen Medium Die magnetische Durchlässigkeit µ ist also keine konstante Größe. Man unterscheidet weichund hartmagnetische Werkstoffe. B = µr ⋅ µ0 ⋅ H mit Bild 3: Hystereseschleife 1. weichmagnetisches Material 2. hartmagnetisches Material 4.1.2. Durchflutungsgesetz So wie im elektrischen Feld die elektrische Spannung U durch Feldstärke mal Weg ( U = E ⋅ l ) definiert ist, führen wir auch im magnetischen Feld die magnetische Spannung V ein. V = H ⋅l Ist die Feldstärke H längs des gewählten Weges nicht konstant, so kann man die Strecke in einzelne Abschnitte aufteilen. Bei genügend feiner Aufteilung kann die Feldstärke innerhalb jeden infinitesimal kleinen Abschnitts als konstant betrachtet werden. Es ergeben sich magnetische Teilspannungen. Skript zum Laborversuch GM 4 Bei Addition aller Teilspannungen ergibt sich: V = H1 ⋅ l1 + H 2 ⋅ l2 +...+ H n ⋅ l n = å H ⋅ l = Θ H H Diese Beziehung ist in der Form Θ = ò H ds als Durchflutungsgesetz bekannt. C Die Durchflutung Θ gibt den gesamten elektrischen Strom an, der die von einer magnetischen Feldlinie eingeschlossene Fläche durchsetzt. Betrachten wir den im Bild 2 dargestellten Leiter, so bilden die magnetischen Feldlinien Kreise, in dessen Innern der Strom I hindurchgeführt wird. Handelt es sich um eine Spule mit N Windungen, so gilt: Θ = I⋅N 4.1.3. Analogie zum Ohmschen Gesetz Die für den magnetischen Kreis charakteristischen Größen magnetischer Fluß Φ und Durchflutung Θ stehen in einem Zusammenhang, der den Verhältnissen eines elektrischen Stromkreises analog ist. Diese Analogie ist zur Berechnung komplizierter magnetischer Kreise oftmals sehr nützlich. Elektrischer Kreis Magnetischer Kreis Θ = Φ ⋅ Rmag U = I⋅R l R= κ⋅A Rmag = l µ⋅ A 4.1.4. Zusammenfassung der wichtigsten Größen und ihrer Einheiten magnetische Größe SI-Einheit H H magnetische Feldstärke (Vektor) A m H B magnetische Flußdichte (Vektor) 1T = 1 Φ magnetischer Fluß (Skalar) Vs Wb 2 =1 m m2 1Vs = 1Wb Θ Durchflutung (Skalar) A V magnetische Spannung (Skalar) A µ Permeabilität Vs Am Skript zum Laborversuch GM 5 4.2. Grundlagen der Gleichstrommaschine Bei der Umwandlung von elektrischer in mechanische Energie in elektrischen Maschinen sind immer magnetische Felder beteiligt. Ferner wirken immer zwei physikalische Effekte zusammen: die Lorentzkraft und die Induktion einer Spannung. 4.2.1. Induktionsgesetz (Generatorprinzip) Wird eine Spule der Windungszahl N von einem zeitlich veränderbaren Magnetfeld durchsetzt, so entsteht in ihr eine Spannung uq , die durch das Produkt von Windungszahl N und dem zeitlichen Differentialquotienten des verketteten Magnetflusses Φ bestimmt ist. Diese Beziehung wird im Faraday’schen Induktionsgesetz beschrieben: H H H d dΦ H uq = ò E ( t )ds = − òò B( t )dA( t ) = − für N = 1 dt dt C A Wird eine Spule mit mehreren Windungen betrachtet, ergibt sich für die induzierte Spannung: dΦ dt Rotiert nun ein Gleichstromanker im Ständerfeld der Luftspalt-Flußdichte B mit konstanter Geschwindigkeit v, so wird in den Leiterstäben entlang des Umfangs nach U q = B ⋅ l ⋅ v eine uq = − N ⋅ Spannung induziert. Dies gilt aber nur, wenn B, v und l senkrecht aufeinander stehen. 4.2.2. Lorentzkraft (Motorprinzip) Für die Wirkungsweise elektrischer Maschinen ist neben dem Induktionsgesetz vor allem die Kraftwirkung auf einen stromdurchflossenen Leiter im Magnetfeld von Bedeutung. Wird ein vom Strom I durchflossener Leiter der Länge l im magnetischen Feld der Induktion B angeordnet, so wirkt auf den Leiter die Lorentz-Kraft F. Es gilt: H H H F = I ⋅ ( l × B) Bilden Feldrichtung und Leiter einen rechten Winkel, so vereinfacht sich die Gleichung zu: F = I ⋅l ⋅ B Leiterstück I H F H l H B Bild 4: Stromdurchflossener Leiter im Magnetfeld Skript zum Laborversuch GM 5. Gleichungen der Gleichstrommaschine 5.1. Berechnung der induzierten Spannung Zur Berechnung der in einer Ankerwicklung mit z Leitern und 2a parallelgeschalteten Ankerzweigen induzierten Spannung, tragen wir über dem abgewickelten Ankerumfang die Verteilung der Normalkomponente der Induktion B im Luftspalt der Maschine auf. Man erhält so die Feldkurve. Bild 5: Erregerfeld einer Gleichstrommaschine Bild 6: Induzierte Spannung in einem bewegten Leiter Jene Stellen des Ankerumfangs, wo die Normalkomponenten der Induktion B Null sind, heißen neutrale Zonen (NZ). Verwandeln wir die Fläche der Feldkurve in ein flächengleiches Rechteck mit der Grundlinie τp , so ist BL,m der Mittelwert der Induktion B über eine Polteilung τp . Der Induktionsfluß ist somit: Φ = τp ⋅ l ⋅ BL,m Nach der Formel Ui = B ⋅ l ⋅ v errechnet sich die im Mittel in einem Ankerleiter induzierte s 2⋅π⋅r Ω Spannung, wenn B = BL,m und v = = = 2⋅π⋅r ⋅ ist. Der Ausdruck 2⋅π⋅r entt t 2⋅π spricht dem Umfang des Ankers, wobei man den Umfang auch durch die Beziehung U = 6 Skript zum Laborversuch GM 7 2⋅p⋅τp ausdrücken kann. τp ist die Polbreite oder auch Polteilung, p ist die Polpaarzahl. Setzt man diesen Ausdruck oben ein, so erhält man: Ω v = 2 ⋅ p ⋅ τp ⋅ 2⋅π Dieser Ausdruck kann jetzt bei Ui eingesetzt werden. Ui = B ⋅ l ⋅ 2 ⋅ p ⋅ τp ⋅ Ω 2⋅π Dieser Ausdruck kann mit Hilfe des Induktionsgesetz weiter vereinfacht werden. Es gilt: Φ = òò B ⋅ dA = B ⋅A = B ⋅ l ⋅ τ p Ω 2⋅π Durch Hin- und Rückführung des Leiters innerhalb des Rotors wird die induzierte Spannung vervielfacht. Der Rotor zerfällt also in 2a parallele Zweige, wobei jeder Ankerzweig z/2a Leiter in Reihenschaltung besitzt. Damit gilt für Ui : Ui = 2 ⋅ p ⋅Φ ⋅ Ui = 2 ⋅ p ⋅Φ ⋅ Ω z ⋅ 2 ⋅ π 2a mit c = 2p ⋅ z 2a ⋅ 2 π Ui = c ⋅Φ ⋅ Ω c ist als Maschinenkonstante definiert. 5.2. Berechnung des Drehmoments Ein Magnetfeld übt auf einen stromdurchflossenen Leiter eine Kraft aus. Ist dieser Leiter drehbar angeordnet, so entsteht ein Drehmoment gleich Kraft mal Hebelarm: H H H M = F×r In elektrischen Maschinen ist dieser Hebelarm gleich dem Radius des Ankers. Da wir es mit vielen Leitern zu tun haben, müssen wir alle Einzelkräfte oder Einzelmomente addieren, um das Gesamtmoment des Ankers zu erhalten. Gehen wir von einer gleichmäßig verteilten Wicklung aus, dann ist als Leiterstrom der Strombelag A zu setzen und die Gesamtkraft durch Integration über den ganzen Ankerumfang zu bestimmen. In den meisten Fällen genügt aber eine Integration über eine Polteilung und die Multiplikation dieses Ergebnisses mit der Polzahl, da sich alle Verhältnisse von Polteilung zu Polteilung wiederholen. Für das Drehmoment gilt: M = 2 p ⋅ r ⋅ l ⋅ ò A( x ) ⋅ B( x ) ⋅ dx τp 0 Skript zum Laborversuch GM 8 Bei Gleichstrommaschinen ist der Strombelag zwischen zwei aufeinanderfolgenden Bürsten, d.h. längs einer Polteilung, konstant. Man können auch schreiben: M = 2 p ⋅ r ⋅ l ⋅ A ò B( x ) ⋅ dx mit Φ = ò ò B( x ) ⋅ dx τp l τp 0 0 0 Φ = l ⋅ ò B( x ) ⋅ dx τp 0 Þ M = 2 p ⋅ r ⋅ A ⋅Φ Den Strombelag einer Gleichstrommaschine kann man auch angeben mit: I z A= ⋅ a 2a 2π ⋅ r Bild 7 Führen wir dies in die Momentengleichung ein, so gilt: I z M = 2 p ⋅ r ⋅Φ ⋅ ⋅ a 2a 2 π ⋅ r M = c ⋅ Φ ⋅ Ia mit c = 2p ⋅ z 2a ⋅ 2 π Skript zum Laborversuch GM 9 6. Schaltungsarten Nach der Schaltung des Anker- und Erregerstromkreises werden folgende Grundtypen von Gleichstrommaschinen unterschieden. • Reihenschlußmaschine: Die Erregerfeldwicklung wird vom Ankerstrom durchflossen, d.h. Reihenschaltung von Ankerwicklung und Erregerwicklung. • Nebenschlußmaschine: Die Erregerfeldwicklung ist parallel zum Anker geschaltet. • Maschine mit Fremderregung: Die Erregerwicklung ist an eine unabhängige Stromquelle angeschlossen. Es gibt auch Kombinationen von Reihen- und Nebenschlußmaschine, z.B. die Doppelschlußmaschine. Es kann somit eine endlich Leerlaufdrehzahl bei einer Reihenschlußmaschine erreicht werden. Eine häufiger angewandte Kombination von Reihen- und Nebenschlußmaschine ist eine Maschine mit Kompoundwicklung. Die Kompoundwicklung einer Nebenschlußmaschine ist eine vom Ankerstrom durchflossene Zusatzerregerwicklung, die die Feldschwächung durch die Ankerrückwirkung vermindert. Die Enden dieser Wicklungen werden auf Klemmbretter geführt und mit Buchstaben nach VDE 0570 versehen. In der nachfolgenden Abbildung sind alle möglichen Schaltungen einer Gleichstrommaschine zusammengefaßt dargestellt. A1-A2 : Ankerwicklung B1-B2 : Wendepolwicklung C1-C2 : Kompensationswicklung D1-D2 : Reihenschlußwicklung E1-E2 : Nebenschlußwicklung F1-F2 : Fremderregung Bild 8: Zusammenfassung aller möglichen Schaltungsarten einer GM Im Motorbetrieb ist bei Rechtslauf eine Stromrichtung durch alle Wicklungen im Sinne der alphabetischen Reihenfolge, also von A1 nach A2, von B1 nach B2 usw., festgelegt. Auf die Wendepol- und Kompensationswicklung wird im folgenden Kapitel näher eingegangen. Skript zum Laborversuch GM 10 7. Feldverlauf bei verschiedenen Erregungszuständen 7.1. Hauptfeld Für den Betrieb der Maschine interessiert vor allem die Radialkomponente der Luftspaltinduktion entlang des Ankerumfangs. Diese Feldkurve B = f (x) bestimmt die Größe des magnetischen Flusses und damit die induzierte Gesamtspannung und das Drehmoment. Läuft eine Gleichstrommaschine im Leerlauf, so besteht nur das Erregerfeld der Hauptpole. Es gilt:If = If, N ≠ 0 und Ia =0 a) Schnittbild b) Abwicklung Bild 9: Erregerfeld der Hauptpole Die Feldverteilung ist von der magnetischen Leitfähigkeit abhängig. Daher ist die durch die Ankernuten hervorgerufene Mikrostruktur der Feldverteilung über einen Pol nicht konstant (siehe gepunkteter Feldverlauf). In einigen Fällen wird die Feldkurve gezielt durch Variation des Luftspaltes beeinflußt. 7.2. Ankerfeld Bei Betrieb der Gleichstrommaschine tritt im Anker der Laststrom Ia auf, der ein eigenes Magnetfeld zur Folge hat. Zur Darstellung dieses Ankerfeldes muß die Durchflutung der stromdurchflossenen Ankerwicklung bekannt sein. Hierzu führen wir den Begriff des Strombelages ein, der durch eine Verteilung des Stromes sämtlicher Leiterstäbe za am Ankerumfang entsteht. Der Strombelag ist innerhalb einer Polteilung konstant und wechselt jeweils in der neutralen Zone sein Vorzeichen. Die Durchflutung Θ (Felderregerkurve) erhalten wir durch Inte- Θa ( x ) = ò A( x ) ⋅ dx x gration über den Strombelag. 0 Die Ankerfeldkurve läßt sich ermitteln, wenn wir zusätzlich die magnetische Leitfähigkeit µ µ und die Luftspaltlänge δ berücksichtigen. Ba ( x ) = 0 ⋅ Θa ( x ) δ( x ) Infolge der Ankerdurchflutung entsteht bei vernachlässigtem magnetischen Widerstand des Eisens ein Ankerfeld Θ, das im Bereich des Polschuhes, bei etwa konstanter Feldlinienlänge bis hin zu den neutralen Zonen, linear verläuft (s. Bild 11). In der Pollücke sattelt das Feld ein, Skript zum Laborversuch GM 11 da hier ein großer Luftspalt zu überwinden ist. Da die Symmetrieachse des Feldes in der neutralen Zone liegt und damit 90° zur Erregerfeldachse versetzt ist, spricht man vom Ankerquerfeld. Wir untersuchen den Fall: If = 0 und Ia = Ia, N ≠ 0 a) Schnittbild b) Abwicklung Bild 10: Verlauf des Strombelages A Bild 11: Felderregerkurve Bild 12: Feldkurve Skript zum Laborversuch GM 12 7.3. Betriebsfeld Im Betriebsfeld der Gleichstrommaschine treten das Erreger- und Ankerquerfeld gleichzeitig auf. Wir untersuchen den Fall: If = If, N und Ia = Ia, N a) Schnittbild b) Abwicklung Bild 13: Betriebsfeld einer GM Anker und Erregerfeld überlagern sich jedoch nicht linear, da µFe = f (H). Es tritt also der Effekt der Sättigung ein. Die Feldverzerrung durch das Ankerfeld bewirkt außerdem, daß die magnetisch neutrale Zone verschoben wird. 7.4. Ankerrückwirkung Mit Ankerrückwirkung bezeichnet man die Beeinflussung der Luftspaltinduktion durch die Ankerdurchflutung. Sowohl die induzierte Spannung Ui als auch das Drehmoment M der Gleichstrommaschine sind dem gesamten Fluß pro Pol Φ proportional. Wie verändert nun die Ankerrückwirkung diesen Fluß? • Stromwendung Wie sich in Bild 13 oben erkennen läßt, ist die geometrisch neutrale Zone bei Belastung nicht mehr feldfrei. In den Leitern, die sich in der geometrisch neutralen Zone befinden, entsteht daher bei Belastung eine Spannung. Gerade diese Leiter gehören aber zu den kommutierenden Spulen, welche durch die Kohlebürsten kurzgeschlossen sind. Die durch das Ankerfeld in der kommutierenden Spule hervorgerufene Spannung kann in der kurzgeschlossenen Spule unzulässig hohe Ströme verursachen und die Kommutierung behindern. In der Vorlesung „Grundzüge der Energiewandlung“ wird erläutert, daß für eine gute Kommutierung die kommutierende Spule sogar in einem Feld liegen muß, das dem Ankerfeld entgegengerichtet ist. Um das zu erreichen, könnte man beispielsweise die Bürsten soweit verschieben, bis die kommutierende Spule in diesem gewünschten Feld liegt. Allerdings hängt dann die geeignete Stellung der Bürsten von der Belastung ab. • Lamellenspannung Die Ankerrückwirkung besteht vor allem in einer Verzerrung des Erregerfeldes, wodurch es zu einer Verdichtung des Feldes unter einer Polhälfte kommt. Diese Feldverdichtung kann zu Rundfeuer führen. Ein solches Rundfeuer tritt dann auf, wenn die zwischen benachbarten Stegen des Stromwenders herrschende Spannung Us etwa 35-40V übersteigt, so Skript zum Laborversuch GM 13 daß durch den Kohlenstaub, der sich im Betrieb auf die Isolationsstege zwischen den Stromwenderstegen legt, ein kleiner Lichtbogen eingeleitet werden kann. Wenn einmal ein Lichtbogen eingeleitet ist, so bleibt er bestehen, auch wenn die Spulen zwischen den betroffenen Stegen in ein Feld geringerer Stärke gelangen. Immer neue Spulen kommen jedoch in den Bereich der größten Induktion, so daß ein Lichtbogenkranz und endlich ein Lichtbogen zwischen den Bürstenhaltern auftritt, der dann das Netz kurzschließt. • Eisenverluste Ein weiterer Nachteil der Ankerrückwirkung liegt in der durch die Feldverzerrung bedingten Erhöhung der Eisenwärme im Ankerkern und in den Zähnen, da die Eisenverluste mit dem Quadrat des Höchstwertes der Induktion wachsen. • Infolge der magnetischen Sättigung wird das Feld in der einen Polhälfte weniger verstärkt als in der anderen geschwächt. Der Fluß als Integral des Gesamtfeldes ist damit kleiner als im Leerlauf (Φ < Φ0). 7.5. Aufhebung der Ankerrückwirkung • Wendepolwicklung Will man die Bürsten in der geometrisch neutralen Zone lassen und nicht in die durch die Ankerrückwirkung bedingte neue neutrale Zone verschieben, so muß das Ankerquerfeld in der geometrisch neutralen Zone aufgehoben werden. Dies gelingt durch sogenannte Wendepole, die in der geometrisch neutralen Zone angeordnet werden. Die Wicklung auf den Wendepolen wird in Reihe mit dem Anker geschaltet. Ihre Durchflutung muß so groß sein, daß sie das Ankerfeld in der geometrisch neutralen Zone aufhebt und ein Feld in dieser Zone aufbaut, welches in den von den Bürsten kurzgeschlossenen Spulen eine Spannung induziert, die eine gute Stromwendung gewährleistet. a) Schnittbild b) Abwicklung Bild 14: Betriebsfeld einer GM mit Wendepolen Skript zum Laborversuch GM 14 • Kompensationswicklung Die Feldverzerrung unter den Hauptpolen kann dadurch aufgehoben werden, daß man an der Polschuhoberfläche einen Strombelag aufbringt, der entgegengesetzt gleich dem Strombelag des Ankers ist. Der Strombelag an der Polschuhoberfläche wird durch eine Wicklung ersetzt, die in Nuten des Polschuhes angeordnet ist und in Reihe mit der Ankerwicklung geschaltet wird. Sie heißt Kompensationswicklung. Die Nuten enthalten im allgemeinen nur einen oder zwei Stäbe. Die Stäbe benachbarter Pole werden durch Bügel zu Windungen verbunden. a) Schnittbild b) Abwicklung Bild 15: Betriebsfeld einer Maschine mit Wendepolen und Kompensationswicklung 8. Magnetische Meßmethoden • Hall-Sonde Die Hall-Sonde ist ein bei den Siemens-Werken entwickelter magnetischer Meßfühler, dessen Wirkungsweise auf dem sogenannten Hall-Effekt beruht. Wird ein stromdurchflossener Leiter oder ein Halbleiterplättchen senkrecht zur Richtung des Stromes I von einem Magnetfeld der Induktion B durchsetzt, so erfolgt eine Ablenkung der den Strom führenden Ladungsträger infolge der Lorentzkraft F. Die Ablenkung von Ladungsträgern durch das Magnetfeld verursacht deren Trennung und damit das Auftreten einer Quellenspannung. Die Ladungsträger werden also auf eine Seite gedrängt und rufen so die Hall-Spannung hervor. Die größte Hall-Spannung ergibt sich, wenn die magnetischen Feldlinien die Leiterebene senkrecht durchsetzen. Material: Indiumarsenit Þ • große Hall-Spannung • kleiner Innenwiderstand • hohe Belastbarkeit der Hall-Spannungsquelle Skript zum Laborversuch GM 15 UH I d F B UH Bild 16: Ursache des Hall-Effekts B Bild 17: Abhängigkeit der Hall-Spannung von der magnetischen Flußdichte B⋅ I mir RH Hall-Konstante d Die Hall-Konstante ist materialabhängig. Sie beeinflußt direkt die Größe der entstehenden Spannung UH. Diese erreicht z.B. bei Verwendung von InAs (d = 0,1 mm), einem Steuerstrom von 1A und einer magnetischen Flußdichte von 0,1T den Betrag von 0,1V. U H = RH ⋅ • Flußmesser Der Flußmesser ist ein normales Drehspulgerät (Zeigerinstrument) mit vernachlässigbar kleinem Trägheitsmoment und ohne Rückstellkraft und demnach ohne festen Nullpunkt, so daß immer zwei Ablesungen notwendig sind. Der Flußmesser wird immer in Verbindung mit einer Prüfspule verwendet, die den zu messenden Fluß umfaßt. Der Fluß wird dadurch zur Anzeige gebracht, daß die Prüfspule aus dem Feld herausgezogen wird bzw. in das Feld hineingeführt wird. Die zweite Möglichkeit ist, das Feld selbst zum Verschwinden oder zum Entstehen zu bringen, was durch Ein- oder Ausschaltendes Erregerstromes geschehen kann. U = w⋅ Bild 18: Flußmesser dΦ dt Skript zum Laborversuch GM 16 9. Drehzahlsteuerung Dieser Versuch soll auch dazu dienen, die verschiedenen Möglichkeiten der Drehzahlsteuerung eines Gleichstromantriebs im stationären Betrieb kennenzulernen. Stationär bedeutet, daß keine zeitlichen Änderungen der elektrischen und mechanischen Größen des Systems auftreten. Wir betrachten dafür das elektrische Ersatzschaltbild einer Gleichstrommaschine. Ra Φ If La Ia Uf Ua Ui Bild 19: Elektrisches Ersatzschaltbild der Gleichstrommaschine Nach dem zweiten Kirchhoff’schen Satz (ΣU =0 ) gilt für die Ankerspannung Ua : d i (t ) ua ( t ) = ia ( t ) ⋅ Ra + La ⋅ a + ui ( t ) dt Im stationären Betriebsfall sind Strom, Spannung und Drehmoment konstant. Es gilt: d i (t ) La ⋅ a =0 dt Es ergibt sich für Ua : U a = I a ⋅ Ra + U i U a = I a ⋅ Ra + c ⋅ Φ ⋅ Ω Wenn man in den Ankerkreis noch Vorwiderstände Rv schaltet und den Spannungsabfall an den Bürsten Ub (ca. 2V) berücksichtigt, dann ergibt sich für Ua : U a = I a ⋅ ( Ra + Rv ) + U b + c ⋅ Φ ⋅ Ω Löst man die Spannungsgleichung unter Vernachlässigung von Ub nach Ω auf, so folgt für das Drehzahlverhalten: U − I ⋅ ( Ra + Rv ) Ω= a a c ⋅Φ Man erkennt, daß eine Beeinflussung der Drehzahlkennlinie n = f (I) durch Variation der Parameter Rv , Ua und Φ möglich ist. Skript zum Laborversuch GM 17 9.1. Drehzahlsteuerung durch Variation des Vorwiderstandes Wenn Ua und Φ konstant sind, dann ergibt sich entsprechend Ω= Die Ableitung Ua I ⋅ ( Ra + Rv ) − a = Ω 0− ∆ Ω c ⋅Φ c ⋅Φ R + Rv dΩ =− a < 0 wird als Stabilitätsmaß bezeichnet. dI a c ⋅Φ Bild 20: Kennlinienschar bei Variation des Vorwiderstandes Rv Mit steigendem Vorwiderstand Rv wird der Betrag der Steigung in der Geradengleichung erhöht, die Drehzahl fällt also mit wachsendem Drehmoment stärker ab. Diese Art der Steuerung ist mit großen Verlusten verbunden, da im Ankervorwiderstand die Leistung: Pv = I a2 ⋅ Rv in Wärme umgesetzt wird. Zudem können bei größeren Leistungen keine Potentiometer, die eine stufenlose Verstellung anbieten, verwendet werden. Dieses Verfahren ist eine reine Verluststeuerung und daher unwirtschaftlich. 9.2. Drehzahlsteuerung durch Änderung der Ankerspannung Bei Veränderung der Ankerspannung verschiebt sich also die Leerlaufdrehzahl auf der Drehzahlachse, während die Steigung unverändert bleibt. Für Rv = 0 und konstantem Fluß Φ ergibt sich bei Variation von Ua entsprechend: Ω= U a − I a ⋅ Ra c ⋅Φ Skript zum Laborversuch GM 18 Bild 21: Kennlinienschar bei Variation der Ankerspannung Ua Eine durch die Ankerrückwirkung hervorgerufene Feldverzerrung wirkt immer flußschwächend, sowohl bei Motor- als auch bei Generatorbetrieb. Der Zusammenhang ist in erster Näherung quadratisch mit dem Ankerstrom. U − I a ⋅ Ra n= a c ⋅ (Φ0 − ∆Φ ) dn Es besteht die Gefahr der Instabilität, wenn > 0 wird. Siehe auch gestrichelter Kurverzug dI a in Bild 21. 9.3. Drehzahlsteuerung durch Änderung des Flusses Durch eine Feldschwächung (Feldsteuerung) läßt sich die Drehzahl der Maschine auf Drehzahlen über der Grunddrehzahl erhöhen, wobei man sich meist auf die doppelte Nenndrehzahl beschränkt. Aus der Drehzahlgleichung sieht man, daß sich die Leerlaufdrehzahl und die Steigung der Geraden verändert. n Φ nimmt zu Ia Bild 22: Kennlinienschar bei Variation des Flusses Φ Skript zum Laborversuch GM mit M = c ⋅ Φ ⋅ I a = M Besch + M Rbg + M Fe + M L U a = c ⋅ Φ ⋅ Ω + I a ⋅ Ra Ua = c ⋅Φ ⋅ Ω + Þ Ω= 19 Ra ⋅ M c ⋅Φ Ua M ⋅ ( Ra + Rv ) − c ⋅Φ ( c ⋅ Φ )2 Für eine konstante Ankerspannung Ua und Rv = 0 ergibt sich bei Variation von M das im nachfolgenden Diagramm dargestellte Drehzahlverhalten. Bild 23: Drehzahlverhalten bei Variation von M Danach neigt der leerlaufende Antrieb (M = 0) bei Flußschwächung zum Durchgehen in positiver Drehrichtung. Der Fluß eines belasteten Antriebs (M ≠ 0) darf nur bis zu einem bestimmten Mindestwert (Φmin) geschwächt werden. Unterschreitet man diesen Mindestwert, so wird der Antrieb instabil. Skript zum Laborversuch GM 20 10. Versuchsdurchführung Der Versuch ist vollständig aufgebaut. Es sind während des Versuchs Schalthandlungen vorzunehmen, um die gewünschten Betriebszustände einzustellen. Der betreuende Tutor kann dabei lediglich Hilfestellung geben! Jeder muß in der Lage sein, die Schalthandlungen in der richtigen Reihenfolge vorzunehmen und die zu erwartenden Meßwerte in ihrer Größenordnung abschätzen zu können. 10.1. Versuchsaufbau Die Maschinen besitzen folgende Nenndaten: Prüfling Uf,N = 120V If,N = 3,5A Ua,N = 220V Ia,N = 545A nN = 1300 U/min PN = 104,5kW Für beide Maschinen gilt: Belastung Uf,N = 220V If,N = 4A Ua,N = 220V Ia,N = 660A nN = 1300 U/min PN = 116kW 2p = 4 la = 21cm τp = 28,5cm 10.2. Vorbereitungsfragen zum Versuch 1. Zeichnen Sie das Schnittbild einer vierpoligen (zweipoligen) Gleichstrommaschine mit Erreger-, Anker-, Wendepol- und Kompensationswicklung. Zeichnen Sie die Stromrichtungen für einen rechtslaufenden Motor ein. 2. Zeichnen Sie den Verlauf der magnetischen Feldlinien im Schnittbild für jede der einzeln erregten, in Frage 1 genannten Wicklungen einer Gleichstrommaschine. 3. Zeichnen Sie den Verlauf der Normalkomponente der Luftspaltinduktion längs des abgewickelten Ankers unter der Annahme, daß es keine Tangentialkomponente gibt. Folgende Fälle sollen betrachtet werden: • Leerlauf If,N ,Ia = 0 • If = 0, Ia,N , wenn a) keine Wendepole vorhanden sind b) Wendepole vorhanden, aber nicht erregt sind c) die Wendepole ca. 20% übererregt sind • Nennbetrieb mit If,N ,Ia,N a) ohne Kompensationswicklung b) mit Kompensationswicklung 4. Was versteht man unter Ankerrückwirkung? Wie kann diese unterdrückt werden? Wodurch entsteht ein Flußverlust? 5. Zeichnen Sie das Ersatzschaltbild eines rechtslaufenden Gleichstromgenerators mit Angabe der Strom- und Feldpfeile. Skript zum Laborversuch GM 21 6. Wie lauten die Grundgleichungen der Gleichstrommaschine? Was sind Leerlauf-, Motorund Generatorbetrieb? 7. Erläutern Sie die drei Möglichkeiten der Drehzahlsteuerung einer Gleichstrommaschine. Geben Sie Vor- und Nachteile an. 8. Welche Probleme können beim Anlassen einer Gleichstrommaschine auftreten? Wie kann man diesen Problemen entgegenwirken? 9. Beschreiben Sie Meßmethoden für magnetische Größen. 10. Welche Verluste entstehen in einer Gleichstrommaschine? 10.3. Messungen 10.3.1. Ankerwiderstand Der Widerstand des Ankers Ra und der Wendepol- und Kompensationswicklung (Rw + Rk) ist zu messen. Geben Sie eine Meßmethode an, um Werte im mΩ-Bereich zu messen. 10.3.2. Feldverlauf der Induktion Für eine Gleichstrommaschine mit Kompensationswicklung (Prüfling) sollen folgende Feldverläufe aufgezeichnet werden (RV = 0): a) Messung der Remanenz im Stillstand ohne und mit Erregung (If = 3,5 A) b) Messung des Erregerfeldes im Lauf (If = 3,5 A) c) Messung des Anker- und Wendefeldes im Lauf ohne Kompensationsfeld (IA = 400 A) d) Messung des Anker- und Wendefeldes im Lauf mit Kompensationsfeld (IA = 400 A) e) Messung des Gesamtfeldes ohne Kompensationsfeld (If = 3,5 A, IA = 400 A) f) Messung des Gesamtfeldes mit Kompensationsfeld (If = 3,5 A, IA = 400 A) Maßstäbe am XY-Schreiber: X: Position 10 mV/cm Y: Induktion 20 mV/cm 100 mV = 1,2 T Zur Skalierung der Induktion muss d..................................................... bestimmt werden. 10.3.3. Feldschwächung Im Leerlauf sind am Prüfling bei konstanter Drehzahl n = 1000 min-1 mit RV = 0 folgende Kennlinien aufzunehmen: • U a = f ( I f = 6, 5, .. , 1 A) • I a = f ( I f = 6, 5, .. , 1 A) 10.3.4. Drehzahlkennlinien a) n = f (Ia) - Kennlinie 1. n = f (Ia) mit Ua,Prüf = 80 V, If,Prüf = 3,5A, Rv = 0 mit Kompensation 2. n = f (Ia) mit Ua,Prüf = 160 V, If,Prüf = 3,5A, Rv = 0 mit Kompensation 3. n = f (Ia) mit Ua,Prüf = 160 V, If,Prüf = 3,5A, Rv > 0 mit Kompensation 4. n = f (Ia) mit Ua,Prüf = 160 V, If,Prüf = 3,5A, Rv = 0 ohne Kompensation b) n = f (If) - Kennlinie (Ua,Prüf = 40 V, Rv = 0, mit Kompensation) 1. MLast = 0 2. MLast > 0, IBelastung = 150 A Skript zum Laborversuch GM 22 Maßstäbe am XY-Schreiber: n = f (Ia) : X: Ankerstrom 10 mV/cm Y: Drehzahl 0,1 V/cm n = f (If) : X: Erregerstrom 2 mV/cm Y: Drehzahl 50 mV/cm 60 mV = 500 A 1 V = 1000 min-1 60 mV = 10 A 1 V = 1000 min-1 11. Auswertung Für die gesamte Auswertung ist an den Bürsten ein Spannungsabfall von Ub = 2 V anzunehmen. Außerdem soll gelten: Ra = 30 mΩ. 11.1. Leerlaufversuch (zu 10.3.3) Zeichnen Sie folgende Diagramme: a) b) c) d) Ui = f (If) mit Ui = Ua - ∆Ub - Ra ⋅ Ia Ia = f (Ui) Ui ⋅ Ia = f (Ui) Ui ⋅ Ia = f (Ui2) Interpretieren Sie die Kurvenverläufe. Wie nennt man die Leistung Ui ⋅ Ia und welche Anteile umfaßt diese im allgemeinen Fall? Begründen Sie die Gültigkeit der Gleichung Ui ⋅ Ia = Pfe + 2 Prbg im vorliegenden Fall. 11.2. Berechnung der Eisen- und Reibungsverluste im Nennpunkt (zu 10.3.3) Im allgemeinen Fall sind die Reibungsverluste eine Funktion der Drehzahl, während die Eisenverluste sowohl von der Drehzahl als auch vom Fluß abhängen. Für den Prüfling gelten dabei näherungsweise folgende Zusammenhänge: Prbg ∼ n2 Pfe ∼ n2 ⋅ Φ2 ∼ Ui2 Die Eisen- und Reibungsverluste lassen sich mit Hilfe des Diagramms 10.1.d ermitteln. Welche Leistung wird durch den konstanten Anteil repräsentiert und welche Leistung durch den linear ansteigenden Anteil? Begründen Sie Ihre Antwort! Die Nennwerte der Eisen- und Reibungsverluste werden wie folgt bestimmt: Prbg,N æn ö = Prbg ( n = nN ) = Prbg ( n = n1 ) ⋅ ç N ÷ è n1 ø Pfe,N = f (U i,N 2 ) 2 mit n1...Versuchsdrehzahl mit U i,N = U a,N − ∆ U b − Ra ⋅ I a,N 11.3. Bestimmung des Wirkungsgrades (zu 10.3.3) Es ist der Verlauf des Wirkungsgrades über dem Ankerstrom zu zeichnen: η = f (Ia) mit Ua = 80 V Skript zum Laborversuch GM 23 æ 1 1 1 3 5ö Wählen Sie für Ia folgende Werte: I a = ç , , , ,1, ÷ ⋅ I a,N è 20 4 2 4 4 ø P P Der Wirkungsgrad wird bestimmt mit der Gleichung: η = ab = 1 − v Pzu Pzu mit Pv = Pfe + Prbg + Pcu + Pzus + Pb + Pf,N Hinweis: Bei der Bestimmung der zugeführten Leistung Pzu ist die Leistung des Erregerkreises Pf,N = Uf,N ⋅ If,N ebenfalls zu berücksichtigen. Zur Bestimmung der Drehzahl sowie der einzelnen Verlustanteile werden folgende Beziehungen benutzt: Ω = U a,N − Ra ⋅ I a − ∆ U b c ⋅Φ ( Pfe + Prbg = Pfe,N + Prbg,N ) mit cΦ = 1,48Vs æ nö ⋅ç ÷ è nN ø 2 Pcu = Ra ⋅ I a2 Pzus æ I ö = 0,005 ⋅ PN ⋅ ç a ÷ è I a,N ø 2 Pb = I a ⋅ ∆ U b 11.4. Feldverläufe (zu 10.3.1) a) Zeichnen Sie die Lage der Nuten für die Kompensationswicklung und die Ankerwicklung ein. Geben Sie die Lage die Wendepole, des Haupfpolschuhs und -kerns an. b) Zeichnen Sie in die Gesamtfeldkurven die lineare Addition der Erregerfeldkurve (im Lauf!) und der Ankerfeldkurve (ohne Kompensationswicklung) ein. Vergleichen Sie diese mit dem tatsächlichen Betriebsfeld der Maschine ohne Kompensation. c) Ermitteln Sie näherungsweise den Fluß ΦN der Maschine und berechnen Sie das Drehmoment MN und die Konstante c. RH m2 Hinweis: = 1,05 d A ⋅s Is = 0,1A 11.5. Maschinenkonstante (zu 10.3.3) Beschriftung der Diagramme: a) n = f (Ia) b) n = f (If) Ermitteln Sie zur Kontrolle aus den Drehzahlkennlinien bei Nennstrom IN und Nennfluß ΦN die Konstante c. 11.6. Berechnung von Anlaufwiderständen Berechnen Sie einen dreistufigen Anlaßwiderstand, wenn die Maschine bei konstanter Nennspannung vom Stillstand auf Nenndrehzahl hochgefahren werden soll und der Ankerstrom den Skript zum Laborversuch GM 24 Nennstrom nicht überschreiten darf. Berechnen Sie den minimalen Ankerstrom, der in allen Umschaltpunkten gleich sein soll. Welche Voraussetzungen werden beim Umschalten getroffen? Skizzieren Sie eine sinnvolle Schaltung für den Anlaßwiderstand. Verwenden Sie für diesen Unterpunkt folgende Daten: Ua,N = 220V Ia,N = 545A Ra = 30mΩ ∆Ub = 0 11.7. Drehmoment-Drehzahlkennlinien: n = f (M) Zeichnen Sie den Verlauf der Kurven n = f (M) , wenn Sie annehmen: a) die Maschine sei im Nebenschluß geschaltet und U a = U N , Rv = 0 U U a = N , Rv = 0 2 U a = U N , Rv ≠ 0 b) eine vergleichbare Maschine mit entsprechender Erregerwicklung sei im Reihenschluß geschaltet und U a = U N , Rv = 0 U U a = N , Rv = 0 2 U a = U N , Rv ≠ 0 Voraussetzungen: 1) ∆Ub vernachlässigbar 2) lineare Magnetisierungskennlinie Þ If ∼ Φ