Physik - Uni Saarland Logo
Werbung

Physik für Ingenieure I+II
Ludger Santen
Vorlesungsmanuskript
Saarbrücken, WS 2004/05, SS 05
Inhaltsverzeichnis
1 Einleitung
1
2 Mechanik - Ein Crashkurs
2.1 Die Newton’schen Gesetze . . . . . . . . . . . . . .
2.1.1 Kräfte und das 1. Newton’sche Gesetz . . .
2.1.2 Der Impuls und das 2. Newton’sche Gesetz
2.1.3 Das 3. Newton’sche Gesetz . . . . . . . . .
2.2 Impuls und Energie . . . . . . . . . . . . . . . . . .
2.2.1 Die Impulserhaltung . . . . . . . . . . . . .
2.2.2 Erhaltung der Energie . . . . . . . . . . . .
2.2.3 Kinetische Energie . . . . . . . . . . . . . .
2.2.4 Eindimensionale Stoßprozesse . . . . . . . .
2.2.5 Potenzielle Energie . . . . . . . . . . . . . .
2.3 Drehbewegungen und die Rotationsenergie . . . . .
2.3.1 Die Bewegungsgleichungen für Rotationen .
2.3.2 Der Drehimpuls und das Drehmoment . . .
2.4 Das Gravitationsgesetz . . . . . . . . . . . . . . . .
2.4.1 Die Gravitationskraft . . . . . . . . . . . .
2.4.2 Das Gravitationspotenzial . . . . . . . . . .
2.4.3 Kreisförmige Orbitale . . . . . . . . . . . .
2.4.4 Die reduzierte Masse . . . . . . . . . . . . .
2.4.5 Die Kepler’schen Gesetze . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
3
4
5
7
7
8
8
10
11
12
15
16
18
18
19
20
20
21
3 Schwingungen
3.1 Einfache harmonische Schwingungen . . . . . . . . . .
3.2 Gedämpfte Schwingungen . . . . . . . . . . . . . . . .
3.2.1 Schwache Dämpfung . . . . . . . . . . . . . . .
3.2.2 Starke Dämpfung (Kriechfall) . . . . . . . . . .
3.2.3 Kritische Dämpfung (Aperiodischer Grenzfall)
3.3 Erzwungene Schwingungen . . . . . . . . . . . . . . .
3.3.1 Resonanz . . . . . . . . . . . . . . . . . . . . .
3.4 Überlagerung der Schwingungen . . . . . . . . . . . .
3.4.1 Schwebungen . . . . . . . . . . . . . . . . . . .
3.5 Fourier-Reihen . . . . . . . . . . . . . . . . . . . . . .
3.6 Gekoppelte Schwingungen . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
25
25
28
28
30
30
31
32
32
34
34
36
i
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ii
INHALTSVERZEICHNIS
4 Quantenmechanik
4.1 Grundlagen der Quantenphysik . . . . . . . . . . . . . . .
4.1.1 Die Bausteine der Materie . . . . . . . . . . . . . .
4.1.2 Struktur des Atomkerns . . . . . . . . . . . . . . .
4.1.3 Radioaktivität . . . . . . . . . . . . . . . . . . . .
4.1.4 Radioaktiver Zerfall . . . . . . . . . . . . . . . . .
4.2 Photonen . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Der Photoeffekt . . . . . . . . . . . . . . . . . . . .
4.2.2 Impuls des Photons: Der Compton-Effekt . . . . .
4.3 Teilchen-Welle Dualität . . . . . . . . . . . . . . . . . . .
4.3.1 Die Unschärferelation . . . . . . . . . . . . . . . .
4.4 Die Schrödinger-Gleichung . . . . . . . . . . . . . . . . . .
4.4.1 Die Wellenfunktion eines freien Teilchens . . . . .
4.4.2 Interpretation der Wellenfunktion . . . . . . . . .
4.4.3 Normierung . . . . . . . . . . . . . . . . . . . . . .
4.4.4 Die Schrödinger-Gleichung . . . . . . . . . . . . . .
4.4.5 Bewegung in einem zeitunabhängigen Potential . .
4.4.6 Stationäre Zustände . . . . . . . . . . . . . . . . .
4.5 Teilchen in eindimensionalen Potentialen . . . . . . . . . .
4.5.1 Der endliche Potentialtopf . . . . . . . . . . . . . .
4.5.2 Die Potentialbarriere . . . . . . . . . . . . . . . . .
4.5.3 “Eingesperrte Teilchen” . . . . . . . . . . . . . . .
4.5.4 Quantenzahlen . . . . . . . . . . . . . . . . . . . .
4.6 Der quantenmechanische Oszillator . . . . . . . . . . . . .
4.6.1 Das Korrespondenzprinzip . . . . . . . . . . . . . .
4.7 Quantensysteme . . . . . . . . . . . . . . . . . . . . . . .
4.7.1 Das Wasserstoffatom . . . . . . . . . . . . . . . . .
4.7.2 Atomspektrum . . . . . . . . . . . . . . . . . . . .
4.7.3 Eigenschaften von Atomen . . . . . . . . . . . . .
4.7.4 Der Spin des Elektrons . . . . . . . . . . . . . . . .
4.7.5 Der Drehimpuls und magnetische Dipolmomente .
4.8 Kernspinresonanz . . . . . . . . . . . . . . . . . . . . . . .
4.8.1 Das Pauli-Prinzip . . . . . . . . . . . . . . . . . . .
4.8.2 Der Aufbau des Periodensystems . . . . . . . . . .
4.8.3 Bestimmung der Elemente durch Röntgenstrahlung
4.9 Laser und Laserlicht . . . . . . . . . . . . . . . . . . . . .
4.9.1 Die Funktionsweise eines Lasers . . . . . . . . . . .
4.9.2 Der He-Ne Laser . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
39
39
39
40
40
41
42
42
43
45
45
46
47
48
48
49
49
50
51
51
53
55
57
57
58
58
58
59
63
64
64
66
67
68
69
70
70
71
A Konservative Kräfte
81
A.1 Wegintegrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
A.2 Konservative Kräfte und Potenziale . . . . . . . . . . . . . . . . . . . . . 82
Kapitel 1
Einleitung
1
2
Kapitel 1. Einleitung
Kapitel 2
Mechanik - Ein Crashkurs
Wir wollen in diesem Abschnitt einige Grundbegriffe der Mechanik ansprechen, die für
das Verständnis des weitereren Vorlesungsprogrammes von Bedeutung sind. Für eine
umfassende Einführung in dieses Gebiet sei auf die Vorlesung “Technische Mechanik”
verwiesen.
2.1
2.1.1
Die Newton’schen Gesetze
Kräfte und das 1. Newton’sche Gesetz
Wenn sich ein Körper in einem Ruhezustand befindet, bedeutet dies, dass die Kräfte,
die auf ihn wirken, sich gegenseitig aufheben.
F3
F2
F1
Bsp.: Ein Stab wird mit einem Faden an einem Nagel aufgehängt. Auf den Stab wirkt
natürlich die Schwerkraft, die von der Aufhängung kompensiert werden muss. Ist dies
der Fall, so gilt:
F1 + F2 + F3 = 0
Wichtig ist dabei, dass die Kraft eine vektorielle Größe ist, d.h. durch ihren Betrag
und ihre Richtung festgelegt wird. Allgemein kann man festhalten, dass bei Objekten
in einer Ruhelage, die resultierende Kraft auf das Objekt verschwindet, also
F = F1 + F2 + . . . + FN =
N
X
i=1
3
Fi = 0
4
Kapitel 2. Mechanik - Ein Crashkurs
ist. Die Bestimmung der auftretenden Kräfte, auch bei ruhenden Objekten, ist in
der Konstruktion von entscheidendem Interesse. Bei statischen Berechnungen muss
nämlich überprüft werden, ob die ausgewählten Materialien den Anforderungen gerecht
werden. Die Einheit der Kraft ist 1 Newton = 1N = 1 kg sm2 .
Genau wie die Kraft ist auch die Geschwindigkeit eine vektorielle Größe. Ein
prinzipieller Unterschied zwischen Kraft und Geschwindigkeit besteht allerdings darin,
dass Geschwindigkeiten relative Größen sind. Gewöhnlich messen wir Geschwindigkeiten, z.B. die eines Autos, relativ zur Erdoberfläche. Geschwindigkeiten werden in
Einheiten von m/s gemessen.
Bsp.: Auf einem Kreuzfahrtschiff, das sich mit der Geschwindigkeit v1 relativ zur Wasseroberfläche bewegt, geht ein Mann mit der Geschwindigkeit v2 von Steuerbord nach
Backbord (d.h. von rechts nach links, wenn man vom Heck in Richtung Bug schaut).
Damit ergibt sich dann die Geschwindigkeit v = v1 + v2 relativ zur Wasseroberfläche.
v2
v
v1
Nachdem wir Kräfte und Geschwindigkeit eingeführt haben, lässt sich auch das 1.
Newton’sche Gesetz formulieren. Es besagt
“Jeder Körper bewegt sich mit konstanter Geschwindigkeit, wenn die resultierende
Kraft, die auf ihn wirkt, verschwindet.”
Bem.: Der Betrag der Geschwindigkeit muss nicht von Null verschieden sein, d.h. die
Ruhelage ist miteingeschlossen.
2.1.2
Der Impuls und das 2. Newton’sche Gesetz
Die Umkehrung des 1. Newton’schen Gesetzes besagt, dass die Geschwindigkeit eines Körpers sich ändert, wenn eine Kraft auf ihn wirkt. Weiterhin wissen wir aus
der täglichen Erfahrung, dass die Kraft, die wir zur Beschleunigung benötigen, von
der Masse des Körpers abhängt. Eine Größe, die von Masse und Geschwindigkeit
abhängt, ist der Impuls
p = mv
Wird ein Körper beschleunigt, so stellt dies eine Änderung des Impulses dar. Der Zusammenhang zwischen Impulsänderung und Kraft ist Gegenstand des 2. Newton’schen
Gesetzes
“Die resultierende Kraft auf einen Körper ist identisch mit der Rate der Impulsänderung”
oder
F=
dp
dt
.
5
2.1. Die Newton’schen Gesetze
Für konstante Massen entspricht dies F = m dv
dt =: ma.
Bem.: Das Gleichheitszeichen gilt nur in SI-Einheiten, d.h. die Einheit 1N = 1 kgs2m ist
gerade so gewählt, dass die in F ∝ dp
dt auftretende Proportionalitätskonstante 1 ist.
Bsp.: Welche Geschwindigkeit hat ein Block der Masse 1000 kg, der sich auf einem
Luftkissen reibungslos bewegen kann, wenn man 10 s lang eine Kraft von 10 Newton
aufwendet und der Block zu Beginn ruht (die Kraft wirkt in x-Richtung)?
Antwort: Wir brauchen nur die x-Komponente zu betrachten. Da die Kraft konstant
ist, gilt:
px
⇒ px = Fx ∆t
∆t
10 kgs2m · 10 s
Fx ∆t
m
=
= 0.1
m
1000 kg
s
Fx =
⇒ Vx =
Diese Rechnung zeigt, dass wir relativ kleine Kräfte aufbringen müssen, um große
Massen in Bewegung zu setzen, wenn wir die Reibung vernachlässigen können. Diese
Tatsache wird z.B. bei großen Meßapparaturen von Teilchenbeschleunigern angewandt,
die auf Luftkissentischen angebracht sind. Bei angeschaltetem Luftkissen können diese
Apparaturen trotz ihrer großen Masse leicht neu ausgerichtet werden.
2.1.3
Das 3. Newton’sche Gesetz
Bei der Betrachtung von statischen Gleichgewichten haben wir gesehen, dass sich
Kräfte gegenseitig aufheben. Dies sei nochmal anhand eines Stuhles, der auf dem Fußboden steht, erläutert. Auf den Stuhl wirkt die Gewichtskraft, die den Stuhl nach
unten zieht. Diese Kraft wird durch die Kraft, die der Fußboden auf den Stuhl ausübt,
gerade kompensiert.
Das dritte Newton’sche Gesetz erweitert diese Beobachtung auch auf sich bewegende
Objekte:
“Falls ein Objekt A eine Kraft F auf ein Objekt B ausübt, übt das Objekt B eine Kraft
−F auf das Objekt A aus.”
Bei statischen Gleichgewichten, wie in dem Beispiel des Stuhles auf dem Fußboden,
ist dieses Gesetz Bestandteil unserer Alltagserfahrung. Man sollte sich aber vor Augen
führen, dass das 3. Newton’sche Gesetz auch gilt, wenn z.B. ein Fallschirmspringer die
Gravitationskraft der Erde erfährt. Auch hier wirkt eine Gegenkraft durch den Fallschirmspringer auf die Erde, die allerdings deren Dynamik nicht spürbar beeinflusst.
Bsp.: Eine Lokomotive zieht zwei Wagons der Masse m = 1000 kg. Sie beschleunigt
mit a = 1 sm2 . Was sind die Kräfte zwischen Lok und erstem Wagon und zwischen den
beiden Wagons?
F2
Lsg.:
−F2
F1
−F1
6
Kapitel 2. Mechanik - Ein Crashkurs
Die Kraft auf den zweiten Wagon ist F2 = ma (wir betrachten nur die nicht verschwindende Komponente von Fi ). Da auch der zweite Wagon mit a beschleunigt, muss auf
ihn eine resultierende Kraft ma = F1 − F2 wirken, also F1 = 2ma.
Anwendung der Newton’schen Gesetze: Der Raketenantrieb
Wir betrachten einen Satelliten, auf den keine Kräfte wirken, wie z.B. an einem Punkt,
an dem sich die Gravitationsfelder von Sonne und Erde aufheben. Der Satellit sei vom
Kurs abgekommen. Daher muss von der Bodenstation aus eine Steuerrakete gezündet
werden. Nach der Zündung strömt heißes Gas mit der Geschwindigkeit −vg relativ zur
Rakete aus. Die Rakete brennt während des Zeitraums δt und verändert dabei ihre
Masse um δm < 0.
Die Impulsänderung des Gases ist daher:
δp = −δm vg
Damit ergibt sich nach dem zweiten und dritten Newton’sches Gesetz, dass die Kraft
F =
δm
δp
=
vg
δt
δt
auf den Satelliten wirkt. Die Richtung der Kraft auf den Satelliten ist der Austrittsrichtung entgegengesetzt. Falls die Gesamtmasse M sehr viel größer ist als δm (M ≫ δm),
müssen wir die Änderung von M in unserer Bilanz nicht berücksichtigen und können
die Geschwindigkeitsänderung des Satelliten δv leicht angeben:
F =M
δm
δm
δv
= vg
⇒ δv = vg
.
δt
δt
M
Wir wenden uns nun dem Fall zu, dass die Gravitationskraft nicht verschwindet und
die Masse der Rakete als veränderlich angesehen werden muss, also der Situation beim
Start. Die Rakete bewege sich wiederum gradlinig, so dass wir mit skalaren Geschwindigkeiten und Impulsen rechnen können (siehe Abb. 2.6). Der Impuls der Rakete zum
Zeitpunkt t sei p = M v. Zum Zeitpunkt t + dt hat die Rakete den Impuls
p′ = (M + dM )(v + dv) − U dM
= M (v + dv) + vg dM,
(2.1)
(2.2)
Die Geschwindigkeit vg = (v + dv) − U ist die (konstante) Austrittsgeschwindigkeit
des Gases, v die Geschwindigkeit der Rakete und U die Geschwindigkeit des Gases
relativ zu einem Beobachter auf der Erde. Als äußere Kraft wirkt die Gravitationskraft
(Reibungskräfte werden wiederum vernachlässigt), so dass sich im Zeitintervall [t, t+dt]
die folgende Impulsänderung ergibt:
dp = p′ − p = M dv + vg dM = −gM dt ,
so dass sich die Raketengleichung
dv = −vg
dM
− g dt
M
(2.3)
7
2.2. Impuls und Energie
Abbildung 2.1: (a) Eine beschleunigte Rakete der Masse M zum Zeitpunkt t. Die
Rakete hat die Geschwindigkeit v relativ zum Beobachter. (b) Dieselbe Rakete zum
späteren Zeitpunkt t + dt, wobei U die Geschwindigkeit des austretenden Gases relativ
zum Beobachter ist. (Aus: Halliday et al., Physik)
ergibt. Die Raketengleichung ist eine partielle DGL mit den zeitabhängigen Variablen
v(t), M (t). Solche Gleichungen lassen sich normalerweise nicht analytisch lösen. Hier
liegt aber der Fall getrennter Variablen vor, so dass wir die Terme einzeln integrieren
können:
Zv
0
dv = −vg
ZMf
dM
−g
M
Mi
Zt
dt
0
und damit
⇒ v(t) = vg ln
Mi
− gt
Mf
Wir haben dabei vorausgesetzt, dass die Rakete beim Start (t = 0) die Masse Mi und
zum Zeitpunkt t die Masse Mf hat. Als Anfangsgeschwindigkeit wurde v = 0 gewählt.
2.2
2.2.1
Impuls und Energie
Die Impulserhaltung
In jedem abgeschlossenen System ist der Gesamtimpuls erhalten. Dies lässt sich leicht
durch Anwendung der Newton’schen Gesetze herleiten. Wir betrachten ein System von
N Teilchen mit den Massen mi und den Geschwindigkeiten vi . Der Gesamtimpuls des
N
P
Systems sei p =
mi vi . Wenn keine äußere Kraft auf das System wirkt, muss die
i=1
8
Kapitel 2. Mechanik - Ein Crashkurs
Summe der Kräfte Fi (Fi ist die Kraft, die auf das i-te Teilchen wirkt), verschwinden,
N
P
d.h.
Fi = 0.
n=i
Wenn wir nun die zeitliche Änderung des Gesamtimpulses betrachten, gilt:
d
p =
dt
N
N
X
d
d X
mi vi =
(mi vi )
dt
dt
n=i
n=i
=
|{z}
N
X
Fi = 0
2. Newton’sches Gesetz n=i
Damit lässt sich also das Impulserhaltungsgesetz formulieren:
“Der Impuls eines beliebigen abgeschlossenen Systems bleibt erhalten, wenn keine resultierende äußere Kraft auf das System wirkt.”
2.2.2
Erhaltung der Energie
Um Kräfte generieren zu können, brauchen wir Energie, wie wir aus leidvoller Erfahrung beim Autofahren wissen. Damit der Energiebegriff in physikalischen Gesetzen
anwendbar ist, müssen wir ihn sinnvoll definieren und mit einer Einheit versehen. Die
Definition von Arbeit lautet:
geleistete Arbeit := Kraft · Weg in Richtung der Kraft
W
:= F · r
(2.4)
2
Die Einheit der Arbeit ist Joule = 1 kgm
. Genauso wie für den Impuls gilt auch für
s2
die Energie ein Erhaltungssatz:
“Die Gesamtenergie eines abgeschlossenen Systems ist konstant”
Diesen Erhaltungssatz kann man nicht direkt im Experiment überprüfen. Es zeigt
sich aber, dass theoretische Betrachtungen, die die Energieerhaltung voraussetzen, zu
korrekten Ergebnissen führen.
2.2.3
Kinetische Energie
Wir wollen uns nun mit der Energie, die mit der Bewegung eines Körpers verknüpft
ist, beschäftigen. Eine besonders einfache Situation ist die eines frei fallenden Körpers
im konstanten Schwerefeld. Nach einer Zeit t erreicht der anfangs ruhende Körper die
Geschwindigkeit1 v = gt. Er hat dabei den Weg s = 21 gt2 zurückgelegt. Entlang dieses
1
Wir betrachten wiederum nur die relevante Komponente von Geschwindigkeit und Schwerkraft,
so dass beide Größen wie ein Skalar behandelt werden können.
9
2.2. Impuls und Energie
Weges (der parallel zur Richtung der Schwerkraft verläuft) wirkt die Kraft F = mg
auf den Körper. Damit ist die Arbeit, die geleistet wurde:
E=
1
1
1 2
gt · mg = m(gt)2 = mv 2
2
2
2
Auf Grund der Energieerhaltung muss die geleistete Arbeit gleich der Energie sein, die
in der Bewegung des Körpers gespeichert ist. Damit ist also die kinetische Energie
des Körpers der Masse m:
1
mv 2
2
Ekin =
Bem.:
1. Man kann auch für nicht geradlinige Wege und variable Kräfte zeigen, dass Ekin =
1
2
2 mv ist.
2. Der Schwerpunkt eines Systems von N-Teilchen mit den Massen mi und den
Geschwindigkeiten vi wird durch
R=
N
P
mi ri
i=1
N
P
=
i=1
mi
i=1
definiert, wobei die Gesamtmasse
N
P
N
1 X
mi ri
M
mi des Systems mit M bezeichnet wird.
i=1
Wenn man die Lage der Körper relativ zum Schwerpunkt beschreibt, führt man
ein spezielles Koordinatensystem ein, das sog. Schwerpunktsystem. Diese Wahl
des Koordinatensystems hat folgende Konsequenzen:
(i) Der Gesamtimpuls der Teilchen im Schwerpunktsystem verschwindet.
Es sei: r′i = ri − R
N
d
1 X
d ′
r =
(ri − R) = vi −
pi = vi′
⇒
dt i dt
M
i=1
Damit gilt für den Gesamtimpuls:
P =
N
X
mi vi′
=
i=1
i=1
=
N
X
i=1
N
X
mi vi −
M
M
N
1 X
mi (vi −
pj )
M
j=1
N
X
j=1
so dass sich die obige Behauptung ergibt.
pj = 0 ,
10
Kapitel 2. Mechanik - Ein Crashkurs
(ii) Die kinetische Energie ist minimal, wenn sich der Beobachter mit dem
Schwerpunkt bewegt.
Für einen beliebigen Beobachter gilt:
1
′
Ekin = Ekin
+ MV 2
2
,
wobei V 2 der Betrag der Geschwindigkeit des Schwerpunktes relativ zum
N
P
′
mi (vi′ )2
Beobachter ist, und Ekin
= 12
i=1
2.2.4
Eindimensionale Stoßprozesse
Zur Betrachtung von Stoßprozessen müssen wir sowohl die Impuls- als auch die Energieerhaltung heranziehen. Zur Einführung betrachten wir folgendes Beispiel:
v
(a)
v
(b)
Abbildung 2.2: (a) Ein Wagon der Masse m rollt mit der Geschwindigkeit v auf zwei
stehende Wagons der gleichen Masse. (b) Die drei gekoppelten Wagon bewegen sich
mit der Geschwindigkeit v ′ fort.
Ein Wagon wird mit der Geschwindigkeit v auf zwei stehende Wagons gelenkt und
angekoppelt. Die Impulserhaltung besagt, dass die Geschwindigkeit der drei Wagons
nach dem Stoß v/3 ist, so dass der Gesamtimpuls nach wie vor p = mv ist. Was ist
aber über die kinetische Energie zu sagen? Vor dem Stoß gilt: Ekin = 21 mv 2 , und nach
dem Stoß Ekin = 32 m( v3 )2 = 16 mv 2 .
Es ist also nur 31 der ursprünglichen kinetischen Energie erhalten geblieben, der Rest
ist in Wärmeenergie umgewandelt worden. Einen Stoßprozess, bei dem die kinetische
Energie vor und nach dem Stoß unterschiedlich ist, bezeichnet man als inelastischen
Stoß; gilt neben der Impuls- auch Energieerhaltung, ist der Stoß elastisch. Ein Maß
dafür, inwieweit der Stoß elastisch ist, ist der Restitutionskoeffizient r. Er gibt das
Verhältnis der Relativgeschwindigkeiten vor (v1 − v2 ) und nach (v1′ − v2′ ) dem Stoß an:
r := −
v1′ − v2′
v1 − v2
(2.5)
Bsp.: Autos sind so konstruiert, dass sie sich bei einem Aufprall auf ein Hindernis
in Abhängigkeit von der Geschwindigkeitsdifferenz unterschiedlich stark deformieren.
Bei kleinen Geschwindigkeitsdifferenzen ∆v sollen Schäden am Fahrzeug vermieden
werden, so dass der Stoß möglichst elastisch erfolgen soll. Bei großen Werten von ∆v
hingegen, müssen die Kräfte, die auf die Fahrzeuginsassen wirken, begrenzt werden,
11
2.2. Impuls und Energie
1
r
0.8
0.6
0.4
0.2
0
0
20
40
60
80
100 120
∆V [km/h]
Abbildung 2.3: Typischer Verlauf des Restitutionskoeffizienten r beim Heckaufprall in
Abängkeitkeit von der Geschwindigkeitsdifferenz ∆V der beiden Fahrzeuge.
um Verletzungen zu vermeiden. Daher hat der Restitutionskoeffizient den in Abb. 2.3
dargestellten Verlauf.
Wenn wir davon ausgehen, dass beide Fahrzeuge die gleiche Masse m haben und Fahrzeug 1 mit der Geschwindigkeit v auf das stehende Fahrzeug 2 prallt, ergibt sich für
die Geschwindigkeiten vi′ nach dem Stoß:
1
1−r
(1 + r)v ;
v1′ =
v
2
2
Im Extremfall kann also die Geschwindigkeitsdifferenz um die Hälfte reduziert werden.
Durch die Deformation werden die auftretenden Beschleunigungen weiter reduziert, da
das Abbremsen entlang eines längeren Weges erfolgen kann.
v2′ =
2.2.5
Potenzielle Energie
Wenn wir die Bewegung eines Tischtennisballes verfolgen, den wir aus einer Höhe h
auf eine Platte fallen lassen, sehen wir, dass der Ball zunächst beschleunigt bis er auf
die Platte trifft. Setzt man voraus, dass der Stoß mit der Platte elastisch ist, d.h. kein
Impulsübertrag erfolgt und der Luftwiderstand zu vernachlässigen ist, kehrt der Ball
auf die ursprüngliche Höhe zurück. Die Geschwindigkeit des Balles an der Platte lässt
sich leicht berechnen: Der Weg, der bei konstanter Beschleunigung zurückgelegt wird,
v = gt.
ist zur Zeit t: h = 12 gt2 . Zur selben Zeit t hat der Ball die Geschwindigkeit
√
Damit ergibt sich h = 21 g( vg )2 oder für die Geschwindigkeit v = 2 gh.
Die kinetische Energie ist also beim Aufprall Ekin = 12 mv 2 = mgh. Wegen der Energieerhaltung muss der Ball auch auf der Höhe h dieselbe Energie besitzen. Die Energie, die
durch die Lage des Balles im Gravitationsfeld gespeichert ist, nennt man Potenzielle
Energie. Sie hat in der Höhe h den Wert Epot = mgh.
Schließlich wollen wir noch die Gesamtenergie des Balles auf der Höhe 0 ≤ z ≤ h
berechnen:
1
mv 2 (z) + mgz
E = Eh + Ep =
2
1
m(2g(h − z)) + mgz = mgh
=
2
12
Kapitel 2. Mechanik - Ein Crashkurs
Die Erhaltung der Gesamtenergie ist also durch die Einführung der potenziellen Energie zutreffend beschrieben. Kinetische Energie wird aber nicht in jedem Fall in einer
Energieform gespeichert, die später wieder in kinetische Energie umgewandelt werden
kann. Beispiel hierfür sind inelastische Stöße oder Bewegungen, bei denen Reibung
auftritt. Bei diesen Systemen wird kinetische Energie in Wärmeenergie umgewandelt,
die bei der Energieerhaltung berücksichtigt werden muss.
Der Unterschied zwischen Bewegungen, bei denen die Umwandlung von kinetischer in
potenzielle Energie vollständig oder nur partiell erfolgt, besteht darin, dass im Fall
der vollständigen Umwandlung die Ep nur von der Postition r abhängt und nicht
vom Weg, auf dem man zu dieser Position gelangt. Kräfte, die mit dieser Eigenschaft
der potenziellen Energie verträglich sind, nennt man konservativ. Ein Beispiel einer
solchen Kraft ist die Kraft auf einen Körper im Gravitationsfeld. Reibungskräfte sind
dagegen nicht konservativ.
Bem.: Man kann die Bedingung dafür, dass eine Kraft konservativ ist, einfach dadurch formulieren, dass die Arbeit, die entlang eines beliebigen geschlossenen Weges
im Kraftfeld geleistet werden muss, verschwindet, also:
I
F · ds = 0
Die Berechnung eines solchen Wegintegrals wird im Anhang erläutert.
Potenzielle Energie einer Feder: Bei vielen Federn ist zumindest über einen gewissen Bereich der Auslenkung x das Hook’sche Gesetz erfüllt. Das Hook’sche Gesetz
besagt, dass die rücktreibende Kraft der Feder proportional zur Auslenkung ist, also
F = −kx,
wobei k die Federkonstante bezeichnet. Die potenzielle Energie einer Feder ist daher
Epot (x) = −
Zx
kx′ dx′ =
1 2
kx
2
0
für die Auslenkung x.
2.3
Drehbewegungen und die Rotationsenergie
Drehbewegungen lassen sich gut anhand von Drehungen von Fahrradrädern illustrieren.
Wenn man ein Fahrrad auf den Kopf stellt und das Vorderrad dreht, lassen sich die
Umdrehungen pro Zeiteinheit (sie werden oft in Umdrehungen pro Minute (U/min)
angegeben) einfach dadurch ermitteln wie häufig das Ventil nach oben gelangt.
Will man aber Bewegungsgleichungen für die Drehbewegungen formulieren, ist es
häufig günstiger, die Winkelgeschwindigkeit ω zu betrachten. Einer vollen Umdrehung entspricht ein Drehwinkel von 360◦ oder 2π. Damit ist die Winkelgeschwindigkeit
bei 60 U/min identisch mit ω = 2π rad
s . Allgemein ist der Betrag der Winkelgeschwindigkeit durch
ω=
dΘ
dt
13
2.3. Drehbewegungen und die Rotationsenergie
ds
dΘ
r
Abbildung 2.4: Im Zeitintervall dt legt das Ventil, das sich im Abstand r von der
Drehachse befindet, den Weg ds zurück. Der Winkel, der dabei überstrichen wird ist
dΘ.
definiert, wobei dΘ der im Zeitintervall dt überstrichene Winkel ist (siehe Abb. 2.4).
Wenn wir annehmen, dass das Ventil unseres Rades im Abstand r von der Drehachse
ist, legt es bei einer Drehung um dΘ den Weg ds = dΘ · r zurück.
Damit ist dann die Geschwindigkeit des Ventiles
ds
dΘ
=r
= rω.
dt
dt
Mit der Drehung ist auch eine Rotationsenergie verbunden. Um dies zu veranschauliN
P
chen, zerlegen wir das Rad in N Stücke, die jeweils die Masse mi haben, also
mi =
i=1
M , wobei M die Gesamtmasse der Felge ist. Die gesamte kinetische Energie der Felge
ist damit
Ek =
N
X
1
i=1
2
N
1X
1
1
mi (rω)2 = M r 2 ω 2 = IF ω 2
2
2
2
mi v 2 =
i=1
Die Größe IF = M r 2 bezeichnet das Trägheitsmoment der Felge. Die Formel E =
1
2
2 Iω ähnelt also der üblichen Form der kinetischen Energie mit den Ersetzungen
m↔I
und ω 2 ↔ v 2 .
Wenn man das Trägheitsmoment eines ausgedehnten Körpers mit einer homogenen
Dichte berechnet, kann man die obigen Überlegungen verallgemeinern. Ein Massenelement δmi des Körpers lässt sich mit Hilfe der Dichte ρ darstellen als δmi = ρ δVi
wobei δVi das zu der Masse δmi gehörige Volumenelement ist.
Wie bereits bei der Felge ergibt sich:
X
X
I=
ri2 δmi = ρ
ri2 δVi
i
i
wobei ri der Abstandsvektor von der Drehachse ist. Wenn nun die Teilvolumen infinitesimal sind, geht man von der Summe zum Integral über, so dass:
Z
I = ρ r 2 dV
V
14
Kapitel 2. Mechanik - Ein Crashkurs
z
y
x
Abbildung 2.5: Bestimmung des Trägheitsmoments eines Zylinders.
Bsp.: Trägheitsmoment eines Zylinders, wobei die in der Abb. 2.5 gezeigte Drehachse
auch Symmetrieachse des Zylinders ist. Wir wählen das Koordinatensystem so, dass
das Zylindervolumen durch 0 ≤ x2 + y 2 ≤ R und 0 ≤ z ≤ h beschrieben ist. Damit
gilt:
Z
(x2 + y 2 )dx dy dz .
I =ρ
V
Das Integral lässt sich leichter in Zylinderkoordinaten auswerten:
I=ρ
Zh Z2π ZR
0
0
0
1
r 2 r dz dϕ dr = 2πρh r 4 |R
4 0
=
1
π
ρhR4 = M R2
2
2
mit den Zylinderkoordinaten:
p
x = r cos(ϕ)
r = x2 + y 2
ϕ = arctan(x/y) bzw. y = r sin(ϕ)
z=z
z=z
Obwohl die Formel zur Berechnung von Trägheitsmomenten sehr einfach ist, kann
die tatsächliche Berechnung mit Schwierigkeiten verbunden sein. Dies ist insbesondere
dann der Fall, wenn man das Trägheitsmoment von sehr irregulären Körpern auswertet.
In diesem Fall ist es günstiger, denP
Körper in endliche Massenelemente zu zerlegen und
das Trägheitsmoment gemäß I = δ mi ri2 numerisch zu bestimmen.
i
Sehr nützlich bei der Berechnung von Trägheitsmomenten ist der Steiner’sche Satz:
Wenn die Rotationsachse nicht durch den Schwerpunkt des Systems verläuft, sondern
um eine um R verschobene Achse, so gilt
IA = IS + M R2 ,
15
2.3. Drehbewegungen und die Rotationsenergie
δm i
ri
di
A
S
R
Abbildung 2.6: Drehung um eine parallele Achse, die gegenüber einer Achse, die durch
den Schwerpunkt S geht, um den Vektor R veschoben ist.
wobei IS das Trägheitsmoment des Körpers bei der Drehung um eine parallele Achse
durch den Schwerpunkt bezeichnet. Dieses Ergebnis lässt sich leicht herleiten:
IA =
X
δmi r2i
i
=
X
i
=
X
i
δmi (di − R)2
δmi d2i − 2
= IS + M R 2 ,
da
P
i
X
i
δmi di R + R2
X
δmi
i
δmi di = M S = O. (Wir haben den Schwerpunkt als Ursprung unseres Koordi-
natensystems gewählt.)
2.3.1
Die Bewegungsgleichungen für Rotationen
Damit sich das betrachtete Vorderrad überhaupt dreht, müssen wir es zunächst von
Außen in Rotation versetzen. Dabei wenden wir eine Kraft auf, die das Rad beschleunigt. Die resultierende Winkelgeschwindigkeit hängt sowohl von der Stärke der Kraft
als auch vom Abstand von der Drehachse ab. Wir wollen diesen Zusammenhang in
diesem Abschnitt genauer diskutieren.
Die Winkelgeschwindigkeit
Bislang haben wir nur den Betrag der Winkelgeschwindigkeit betrachtet. Tatsächlich
ist aber die Winkelgeschwindigkeit eine vektorielle Größe. Sie ist folgendermaßen definiert:
16
Kapitel 2. Mechanik - Ein Crashkurs
Die Winkelgeschwindigkeit ω ist der Vektor vom Betrag ω, der parallel zur Drehachse
verläuft und so orientiert ist, dass die Drehung im Uhrzeigersinn erfolgt, wenn man in
Richtung von ω auf das Objekt schaut.
Winkelbeschleunigung
Angenommen, wir haben viel Geld in das Fahrrad investiert, so dass das Vorderrad
seine Winkelgeschwindigkeit beibehalten wird, wenn wir nicht die Bremsen betätigen.
Wenn wir aber abbremsen, reduziert sich die Winkelgeschwindigkeit, bis der Reifen
zur Ruhe kommt.
Wir wollen diese Situation genauer analysieren: Beim Bremsen wird eine Kraft mit
Betrag F auf die Felge übertragen. Die Arbeit, die dabei verrichtet wird, wenn ein
Segment dl durch die Bremsbacken rutscht, ist F dl. Somit ist die damit verbundene
dl
= F v. Die zeitliche Änderung der Rotationsenergie können wir ebenfalls
Leistung F dt
angeben:
d
d 1 2
dω(t)
Erot =
Iω (t) = Iω
dt
dt 2
dt
Wir können nun die beiden Leistungen vergleichen:
F v = F rω = −Iω
dω
,
dt
wobei das negative Vorzeichen daher rührt, dass die Reibungskraft der Bewegungsrichtung entegengesetzt wirkt.
Damit ergibt sich F r = −I
dω
dt .
Wenn wir eine beschleunigende Kraft verwenden, gilt:
Fr = I
2.3.2
dω
dt
(2.6)
Der Drehimpuls und das Drehmoment
Das Drehmoment ist ebenso wie die Winkelgeschwindigkeit eine vektorielle Größe. Es
ist definiert als
M= r×F
also dem Vektorprodukt des Abstandsvektors r (zwischen Drehachse und dem Angriffspunkt der Kraft) und der Kraft F, die aufgewendet wird. Das Drehmoment steht
senkrecht auf der von r × F aufgespannten Ebene und zeigt damit in Richtung der
Drehachse. Wir können also durch die Einführung von M die Gleichung (2.6) auch in
vektorieller Form angeben:
M=I
dω
dt
Wir definieren nun zusätzlich den Drehimpuls
L=Iω
17
2.3. Drehbewegungen und die Rotationsenergie
mit dem wir die folgende Bewegungsgleichung für Rotation erhalten
M=
dL
.
dt
Damit ist die Gleichung analog zum zweiten Newton’schen Gesetz.
Bem.:
(1) Man kann den Drehimpuls auch für nicht-kreisförmige Bewegungen herleiten. Und
zwar gilt:
L=r×p ,
wobei r der Richtungsvektor zwischen Objekt und dem Koordinatenursprung O ist
und p der Impuls des Teilchens.
(2) Der Gesamtdrehimpuls eines Systems von N Teilchen ist definiert als L =
N
P
i=1
Für die Änderung des Gesamtdrehimpulses gilt
ri ×pi .
N
X
dri
d
dpi
L =
×
p
+r
×
i
i
dt
dt
dt
|
{z
}
i=1
=
N
X
i=1
=mi (vi ×vi )=0
ri × Fi =
X
Mi = M .
Damit kann man auch die Erhaltung des Drehimpulses formulieren:
Der Drehimpuls eines Systems ist erhalten, wenn kein resultierendes Drehmoment auf
das System wirkt.
(3) Um einen Körper auf einer Kreisbahn zu halten, muss man eine Kraft aufwenden, die in Richtung der Kreismitte wirkt, die sogenannte Zentripetalkraft: Für eine
Masse m, die auf den Körper wirkt, hat die Zentripetalkraft die Größe
F = −mω 2 r
Dieses Ergebnis lässt sich ebenfalls leicht herleiten: Für eine kreisförmige Bewegung in
der Ebene lautet der zeitabängige Richtungsvektor
r cos(ωt)
r(t) = r sin(ωt) .
0
Damit ergibt sich für die Beschleunigung
a(t) =
d2 r(t)
= −ω 2 r(t)
dt2
und somit F = −mω 2 r nach dem zweiten Newton’schen Gesetz.
18
2.4
2.4.1
Kapitel 2. Mechanik - Ein Crashkurs
Das Gravitationsgesetz
Die Gravitationskraft
Die Gravitationskraft ist ein Beispiel für eine Kraft, die auch auf Objekte wirkt, die
nicht direkt miteinander in Kontakt sind. So spüren wir den Einfluss der Gravitationskraft auch dann, wenn wir uns nicht auf dem Erdboden befinden, wie z.B. beim
Fallschirmsprung.
Abbildung 2.7: Das Kraftfeld einer ausgedehnten und das einer punktförmigen Masse.
Es zeigt sich, dass die Gravitationskraft F(r) = F(r), die von einem kugelförmigen
Objekt mit Radius R ausgeht, für r > R (wobei wir annehmen, dass sich der Schwerpunkt der Kugel bei r = 0 befindet) die gleiche ist wie die von einem punktförmigen
Objekt gleicher Masse.
Je weiter wir uns von der Erde entfernen um so schwächer wird die Anziehungskraft der
Erde. Eine quantitative Beschreibung der Gravitationskraft, die konsistent mit diesen
Beobachtungen ist, gelang Newton. Das von ihm formulierte Gravitationsgesetz lautet
m1
m2
Abbildung 2.8: Die Gravitationskraft wirkt entlang der Verbindungslinie zweier Massen.
“Die anziehende Kraft zwischen zwei Körpern wirkt entlang ihrer Verbindungslinie. Der
Betrag der Kraft ist porportional zum Produkt ihrer Masse und invers proportional
zum Quadrat ihres Abstandes.”
Der Betrag der Kraft ist also gegeben durch
F =G
m1 m2
r2
Der heute akzeptierte Wert der Gravitationskonstante ist
G = 6.6726 ± 0.0009 × 10−11 N m2 kg−2 .
19
2.4. Das Gravitationsgesetz
Mit einem relativen Fehler von 0.013% ist G eine der am schlechtesten bestimmten
Naturkonstanten. Dies liegt darin begründet, dass die Gravitationswechselwirkung vergleichsweise schwach und damit schwer zu bestimmen ist.
2.4.2
Das Gravitationspotenzial
Gravitationskräfte sind konservativ, d.h. wir können ein Potenzial angeben. Dazu betrachten wir eine Masse m, die sich im Abstand r1 von dem Mittelpunkt der Erde
befindet. Was ist die Arbeit, die man leisten muss, um (entlang der Verbindungslinie
der beiden Massen) von r1 zu r2 zu gelangen?
r2
r1
Abbildung 2.9: Arbeit, die geleistet werden muss, um zwei Massen voneinander zu
entfernen.
An jedem Punkt entlang dieser Verbindungslinie gilt:
mME
,
r2
wobei ME die Masse der Erde bezeichnet. Es muss also die Arbeit
Zr2
Zr2
mME
1
1
dr = GmME
−
W = F (r) dr = G
r2
r1 r2
F (r) = G
r1
r1
geleistet werden. Diese Arbeit entspricht der Differenz zwischen der potenziellen Energie an den Punkten r1 und r2 . Die potenzielle Energie ist nur bis auf eine Konstante
festgelegt. Die Konstante wählt man günstigerweise so, dass die potenzielle Energie
im Unendlichen verschwindet. Diese Wahl bedeutet gleichzeitig, dass die potenzielle
Energie negativ ist, wenn man sich der Erde annähert, da man die Energie
mME
,
W∞ (r1 ) = G
r1
aufwenden muss, um sich vom Abstand r1 aus dem Gravitationsfeld zu entfernen.
Demnach ist die potenzielle Energie im Abstand r1
mME
.
r1
Diese Energie kann man als Bindungsenergie für Massen interpretieren, die sich im
Einfluss des Gravitationsfeldes der Erde befinden.
U (r1 ) = −G
20
2.4.3
Kapitel 2. Mechanik - Ein Crashkurs
Kreisförmige Orbitale
Wenn man die auf- bzw. untergehende Sonne betrachtet, stellt man fest, dass sie zu
allen Jahreszeiten näherungsweise die gleiche Größe hat. Daraus kann man schließen,
dass der Abstand zur Sonne im Verlauf eines Jahres nahezu unverändert bleibt, d.h.
die Erde in guter Näherung eine Kreisbahn um die Sonne beschreibt. Wir wollen mit
dieser vereinfachenden Annahme die Umlaufbahn der Erde genauer analysieren.
Auf der Umlaufbahn der Erde müssen sich Zentrifugalkraft und Gravitationskraft kompensieren, d.h.
G
ME MS
2
ROrbit
= ME a = ME ω 2 ROrbit
=
4π 2
ME ROrbit .
T2
Damit ergibt sich
T2 =
3
4π 2 ROrbit
G MS
für die Umlaufzeit der Erde um die Sonne. Bemerkenswerterweise hängt die Umlaufzeit
nur vom Radius des Orbitals und nicht von der Masse des Planeten ab.
Der mittlere Abstand zwischen Erde und Sonne definiert die Astronomische Einheit:
1 Astronomische Einheit = 1 AE = 1.496 · 108 km
Mit diesem Wert können wir auch die Masse der Sonne bestimmen, sie beträgt ca.
1.99 · 1030 kg.
Eine wichtige Anwendung kreisförmiger Umlaufbahnen um die Erde sind sogenannte
geostationäre Satellitenbahnen. Die Satelliten bewegen sich einmal pro Tag um die
Erde, so dass Funksignale dieser Satelliten immer dieselbe Erdhälfte abdecken.
2.4.4
Die reduzierte Masse
Bislang haben wir nur solche Umlaufbahnen betrachtet, bei denen die Mitbewegung
der großen Masse vernachlässigt werden konnte. Dies ist aber z.B. für Doppelsterne
nicht der Fall. Zur Analyse von Systemen zweier Massen ist es zweckmäßig, die sog.
reduzierte Masse µ einzuführen:
µ :=
m1 m2
m1 + m2
Durch die Einführung von µ kann man die Relativbeschleunigung der beiden Teilchen
in der Form
F12 = µ a12
angeben, wobei a12 = a1 − a2 . Dies lässt sich leicht herleiten, wenn man die Bewegungsgleichungen der beiden Teilchen betrachtet:
m1 a1 = F12 bzw. m2 a2 = F21 = −F12
21
2.4. Das Gravitationsgesetz
Damit ergibt sich:
a12
F12 F21
= a1 − a2 =
−
=
m1
m2
1
1
+
m1 m2
F12 = µ F12 ,
also die gesuchte Form der Bewegungsgleichung.
Wir betrachten nun die Bewegung zweier Massen um ihren Schwerpunkt, den wir als
Koordinatensprung wählen, d.h. m1 r1 + m2 r2 = 0.
Damit folgt für r1 = |r1 | und r2 = |r2 | die Beziehung
m2
r1
=
r2
m1
für die Radien der Umlaufbahnen. Für den Abstand r = r1 + r2 zwischen den beiden
m2
) und mit v1 = ωr1 bzw. v2 = ωr2 für die
Massen ergibt sich also r = r2 (1 + m
1
kinetische Energie:
1
1
1 2
m2
2
2
2
2
Ekin =
m1 v1 + m2 v2 = ω m1 (
r2 ) + m2 r2
2
2
2
m1
m21
m2 (m1 + m2 )
1
1 2 2 m22
ω r2
+ m2 = ω 2 r 2
=
2
m1
2
m1
(m1 + m2 )2
1 2 2 1 2
µω r = Iω
=
2
2
mit dem Trägheitsmoment I = µr 2 des Systems.
2.4.5
Die Kepler’schen Gesetze
Basierend auf eigenen und den Messungen von Tycho Brahe hat Johannes Kepler die
folgenden Gesetze für Planetenbahnen formuliert:
1. Jeder Planet bewegt sich auf einer elliptischen Umlaufbahn, wobei sich die Sonne
in einem der beiden Brennpunkte befindet.
2. Der Vektor von Sonne zum Planet überstreicht in gleichen Zeiten gleiche Flächen.
3. Das Quadrat der Perioden der Planetenbahnen ist proportional zu den Kuben
ihrer mittleren Abstände.
Wir wollen nun zeigen, dass diese Beobachtungen mit dem Newton’schen Gravitationsgesetz konsistent sind.
Mathematische Beschreibung von Ellipsen
Bevor wir die Verträglichkeit des Gravitationsgesetzes mit den Kepler’schen Gesetzen überprüfen, wollen zunächst an einige mathematische Eigenschaften der Ellipse
erinnern: Die Bedeutung der Brennpunkte einer Ellipse wird durch die Konstruktionsvorschrift verdeutlicht. Man kann eine Ellipse zeichnen, wenn man einen Stift durch
eine Schlaufe führen lässt, die von zwei Zwecken gehalten wird (siehe Abb. 2.10). Nach
22
Kapitel 2. Mechanik - Ein Crashkurs
r
b
r’
θ
C
ae
a
Abbildung 2.10: Konstruktion einer Ellipse. Die Brennpunkte der Ellipse sind durch
(X) markiert; der Punkt symbolisiert den von der Schlaufe gehaltenen Stift.
einem vollständigen Umlauf erhält man dann eine Ellipse, deren Brennpunkte die beiden Befestigungspunkte der Schlaufe sind.
Desweiteren hat die Ellipse die folgenden definierenden Eigenschaften:
Mit a (b) wird die Länge der großen (kleinen) Hauptachse bezeichnet. Die Exzentrizität
der Ellipse ist so definiert, dass der Abstand vom Zentrum C der Ellipse zu einem
Brennpunkt gerade ae ist. Offensichtlich ist ein Kreis ein Spezialfall der Ellipse für den
e = 0 gilt. Für die Länge des Fadens gilt:
l = 2ae + 2a = 2a (1 + e) .
Mit diesen Definitionen können wir einige weitere Beziehungen herleiten. Die Ellipsengleichung
r=
a(1 − e2 )
1 − e cos Θ
stellt eine Beziehung zwischen dem Winkel θ und dem Abstand r zwischen Brennpunkt
und einem beliebigen Punkt auf der Ellipse her (siehe Abb. 2.10, die obige Beziehung
folgt aus dem Kosinussatz und r ′ = 2a − r.) Durch die Exzentrizität e wird auch das
Verhältnis zwischen kleiner und großer Hauptachse festgelegt. Es gilt:
b p
= 1 − e2 ,
a
so dass nur für große Werte von e(e ≈ 1) deutliche Unterschiede zwischen großer und
kleiner Hauptachse existieren. Dies Ergebnis lässt die Beobachtungen Keplers noch
spektakulärer erscheinen, denn für den Planeten Merkur, dessen Bahn nach dem Pluto
die größte Exzentrizität hat, gilt e = 0.206 und damit b = 0.9786 a. Eine solch geringe
Abweichung von der Kreisbahn mit den damaligen Methoden zu beobachten, ist in der
Tat bemerkenswert!
23
2.4. Das Gravitationsgesetz
Drehimpuls und Beschleunigung in elliptischen Orbitalen
Die Gravitationskraft ist ein Beispiel einer Zentralkraft, einer Kraft zwischen zwei
Objekten, die in Richtung des gemeinsamen Schwerpunktes zeigt. Dies bedeutet auch,
dass es keine Komponente senkrecht zur Verbindungslinie der beiden Massen gibt.
Daher wirkt kein Drehmoment auf das System, so dass der Drehimpuls erhalten sein
muss.
Wir wollen nun den Drehimpuls L = r×p auf einer elliptischen Umlaufbahn berechnen:
In der Zeit δt bewegt sich das Teilchen von Q nach P und überstreicht dabei den
Winkel δθ. Der zurückgelegte Weg ist dabei δs = r δθ. Daher ergibt sich für δt → 0
v⊥ = r
dθ
.
dt
und der Betrag des Drehimpulses L = r × p ist gegeben durch:
L = µ v⊥ r = µ r 2
dθ
,
dt
MS
die reduzierte Masse des Systems Erde/Sonne bezeichnet. Wir
wobei µ = MMEE+M
S
betrachten nun die Fläche des Dreiecks SP Q. Sie ist näherungsweise gegeben durch
δA ≈ 12 r rδθ = 12 r 2 δθ gegeben, so dass die überstrichene Fläche pro Zeit im Limes
δt → 0 durch:
1 dθ
1
dA
= r2
=
L
dt
2
dt
2m
gegeben ist. Wegen der Erhaltung des Drehimpulses ist also dA/dt konstant und somit
das zweite Kepler’sche Gesetz gezeigt.
Die Erhaltung des Drehimpulses bedeutet gleichzeitig, dass die Planeten sich schneller
bewegen, wenn sie der Sonne näher kommen. Es gilt µv1 r1 = L = µv2 r2 und somit
v1
r2
=
.
v2
r1
Wir betrachten nun die Zentripetalbeschleunigung auf elliptischen Bahnen, die durch
a(r) =
L2p
1
2
2
m a(1 − e ) r 2
gegeben ist. Dies ist konsistent mit dem Gravitationsgesetz, da die Kraft auf den
Planeten invers proportional zum Quadrat des Abstandes ist. Damit sind Gravitationsund erstes Kepler’sches Gesetz verträglich.
Um die Konsistenz des dritten Kepler’schen Gesetzes mit dem Gravitationsgesetz zu
zeigen, muss man die Periode einer Umlaufbahn bestimmen. Dazu benutzen wir das
zweite Kepler’sche Gesetz:
Lp
1 dθ
dA
= r2
=
= const .
dt
2
dt
2µ
24
Kapitel 2. Mechanik - Ein Crashkurs
Durch die Tatsache, dass dA/dt einen konstanten Wert annimmt, können
√ wir die Umlaufzeit einfach aus der Division der Fläche der Ellipse A = π ab = π a2 1 − e2 durch
dA/dt erhalten:
√
2πµa2 1 − e2
dA
(2.7)
=
T = A/
dt
Lp
Auf dem elliptischen Orbital müssen sich Gravitationskraft und Zentripetalkraft gegenseitig aufheben, so dass:
L2p
1
GMS Mp
=
r2
µa(1 − e2 ) r 2
(2.8)
⇒ L2p = GMS Mp µ a (1 − e2 )
für den Drehimpuls des Planeten folgt. Eliminiert man Lp in (2.7) und (2.8), erhält
man
T2 =
4π 2 a3
4π 2 µ2 a4 (1 − e2 )
=
,
GMS Mp µ a (1 − e2 )
G(MS + Mp )
also das dritte Kepler’sche Gesetz, bis auf kleine Korrekturen.
Die erste Korrektur besteht darin, dass im Gesetz die Länge der großen Hauptachse
auftritt und nicht, wie von Kepler postuliert, der mittlere Abstand. Dieser Unterschied
ist jedoch relativ unbedeutend, wie die folgende Betrachtung zeigt:
Wenn man nur die beiden Extrempunkte der Bahn nimmt, also das Perihel (sonnennächster Punkt) und das Aphel (sonnenfernster Punkt), ergibt das Mittel 21 (a(1 +
e) + a(1 − e)) = a genau die Länge der großen Hauptachse. Gemittelt über das gesamte
Orbital ergibt sich aber eine Abweichung in der Ordnung O(e2 ).
Eine zweite Korrektur besteht darin, dass man den Abstand zum Schwerpunkt des
Systems und nicht den zur Sonne betrachtet. Dies führt aber selbst für Jupiter nur zu
Abweichungen im Promillebereich.
Somit kann man feststellen, dass die Kepler’schen Gesetze tatsächlich mit sehr großer
Präzision die Umlaufbahnen von Planeten beschreiben.
Positionierung von Satelliten
Zum Abschluss dieses Kapitels wollen wir noch kurz diskutieren wie man überhaupt
Satelliten effektiv auf ihre Umlaufbahnen bringen kann.
Bislang haben wir nur den Fall betrachtet, dass wir eine Rakete senkrecht zur Erdoberfläche starten. Wenn man aber die Rakete nur vertikal zur Erde beschleunigt, wird
der Satellit einfach auf die Erde zurück fallen. Ähnliches gilt, wenn man die Rakete
schräg abschießt: Der Satellit wird zwar auf eine elliptische Bahn gezwungen, aber
möglicherweise steht einem Umlauf des Satelliten die Erde im Weg.
Die Lösung des Problems besteht darin, dass man in ausreichender Höhe eine Geschwindigkeitskorrektur (z.B. durch Abbrennen einer zweiten Brennstufe) vornimmt,
durch die der Satellit auf seine Umlaufbahn gebracht wird.
Kapitel 3
Schwingungen
In diesem Kapitel befassen wir uns mit oszillatorischen Bewegungen und deren quantitativer Beschreibung. Oszillatorische Bewegungen wiederholen sich nach einer Zeit
T , die Periode genannt wird. Die Frequenz ν = T1 mit der Einheit 1 Hertz (Hz) [1
Hz= 1s ] beschreibt, wieviele Zyklen pro Sekunde durchgeführt werden.
Bei Kreisbewegungen (siehe Abb. 3.1) wird vor allem die Winkelgeschwindigkeit zur
Beschreibung herangezogen. In einer Zeit t überstreicht die Bewegung den Winkel ωt,
mit ω = 2π
T = 2πν. Die Zeitabhängigkeit der x-Koordinate wird dann durch
x(t) = a sin (ωt)
beschrieben. Man bezeichnet a als Amplitude der Schwingung und ω als Kreisfrequenz.
3.1
Einfache harmonische Schwingungen
Einfache harmonische Schwingungen sind in der Physik von großer Bedeutung, da sie
häufig eine gute Näherung der tatsächlichen freien Oszillationen sind.
Beispiele:
• Schwingungen einer Masse, die an einer Feder aufgehängt und aus der Ruhelage
ausgelenkt wird.
• Eine Flüssigkeit, die in einem U-Rohr oszilliert . . ..
Die klassische Situation, bei der die Bewegung als harmonische Oszillation (näherungs–
weise) beschrieben wird, ist diejenige, bei der ein Objekt aus der Ruhelage ausgelenkt
wird und von einer Rückstellkraft in die Ruhelage zurückgetrieben wird. Wir betrachten den Fall, bei der die Rückstellkraft F für kleine Auslenkungen proportional zur
Auslenkung ist, also:
F (x) = −kx .
Andererseits gilt nach dem dritten Newton’schen Gesetz
F =m
d2 x
= mẍ .
dt2
25
26
Kapitel 3. Schwingungen
y
ωt
A
a
P
x(t)
a
C
O
0
x
B
-a
0
1
2
3
4
5
6
7
t [s]
Abbildung 3.1: Die Abbildung zeigt ein Teilchen, das sich mit einer konstanten Geschwindigkeit auf einer mit Radius a Kreisbahn bewegt. Der rechte Teil der Abbildung
stellt den zeitlichen Verlauf der x-Koordinate dar, wenn man davon ausgeht, dass sich
das Teilchen zur Zeit t = 0 am Ort r = (0, a) befindet. Der Betrag der Winkelgeschwindigkeit sei ω = 3 rad/s.
Es sollen nur kleine Auslenkungen der Masse aus der Ruhelage betrachtet werden,
so dass wir tatsächlich von einer linearen Rückstellkraft ausgehen können und die
Bewegungsgleichung
ẍ +
(mit ω02 :=
k
m)
k
x = ẍ + ω02 x = 0
m
erhalten.
Man kann leicht nachrechnen, dass
x(t) = x0 cos(ω0 t + ϕ)
eine Lösung der obigen Differenzialgleichung darstellt. Wie bei jeder Differenzialgleichung zweiter Ordnung gibt es 2 sog. Integrationskonstanten (x0 , ϕ), die sich aus der
Auslenkung x(0) = x0 cos(ϕ) und Geschwindigkeit v(t = 0) = ẋ(0) = x0 ω0 sin(ϕ) zur
Zeit t = 0 ergeben.
Die Energie der harmonischen Bewegung bzw. des harmonischen Oszillators wird
durch die Konstanten k, m und x0 vollständig festgelegt. Zur Herleitung dieses Ergebnisses bestimmen wir zunächst das Potenzial U (x) des harmonischen Oszillators. Es
gilt:
F =−
dU (x)
,
dx
so dass
U (x) = −
Z
0
x
1
1
F (x′ )dx′ = kx′2 |x0 = kx2 .
2
2
27
3.1. Einfache harmonische Schwingungen
l
θ
mg sin θ
mg cos θ
mg
Abbildung 3.2: Darstellung des Pendels. Eine Masse m wird durch einen Faden der
Länge l an einer Aufhängung befestigt. Der Winkel θ beschreibt die Auslenkung des
Pendels.
Die Gesamtenergie des Oszillators, d.h. die Summe aus potenzieller und kinetischer
Energie ist daher
1
m (ẋ)2 = Epot + Ekin
2
1
1
k(x0 cos (ω0 t + ϕ))2 + m ω02 x20 sin2 (ω0 t + ϕ) .
2
2
E = U (x) +
=
Mit ω02 =
k
m
gilt dann
1 2
kx (cos2 (ω0 t + ϕ) + sin2 (ω0 t + ϕ))
2 0
1 2 1
kx = mω02 x20 .
=
2 0 2
Damit haben wir uns davon überzeugt, dass die Energie konstant ist und nur von k
und x0 abhängt. An den Umkehrpunkten ±x0 ist die Gesamtenergie identisch mit der
potenziellen Energie, während beim Nulldurchgang E = Ekin gilt.
E =
Beispiel: Das Pendel
Wie wir bereits oben bemerkt haben, ist die harmonische Bewegung häufig nur nä–
he–rungs–weise für kleine Auslenkungen realisiert. Dies gilt auch für das in Abb. 3.2
dargestellte Fadenpendel, das wir im Folgenden genauer untersuchen wollen. Wir betrachten dazu eine Masse m, die an einem masselosen Faden der Länge l hängt. Auf
die Masse wirkt die Schwerkraft, so dass bei einer Auslenkung um den Winkel θ die
Rückstellkraft F = −mg sin θ wirkt.
Für kleine Auslenkungen gilt sin θ ≈ θ, so dass die Tangentialkraft durch F = −mg sin θ
≈ −mg θ gegeben ist. Damit wirkt ein Drehmoment −mglθ auf die Masse und wir erhalten die Bewegungsgleichung
I θ̈ = −mglθ .
28
Kapitel 3. Schwingungen
Das Trägheitsmoment I der Anordnung ist ml2 , so dass
θ̈ +
g
θ=0.
l
Das Pendel verhält sich also für kleine Auslenkungen wie ein einfacher harmonischer
Oszillator mit der Kreisfrequenz ω02 = g/l und damit der Periode
T =
p
2π
= 2π l/g .
ω0
Bem.: Wenn man die Fadenlänge l = 1m wählt, gilt T ≈ 2s, d.h. nach jeweils einer
Sekunde passiert die Masse die Position der Ruhelage. Man nennt ein solches Pendel
daher auch Sekundenpendel.
3.2
Gedämpfte Schwingungen
Bei realen Schwingungen spielen immer Reibungs- bzw. dissipative Kräfte eine Rolle. So
treten dissipative Kräfte allein schon dadurch auf, dass sich das Objekt typischerweise
in einem viskosen Medium bewegt. Daneben gibt es zahlreiche weitere Ursachen für
Dissipation, wie z.B. die Reibungskräfte an der Aufhängung eines Pendels.
Die Wirkung solcher dissipativer Kräfte wollen wir nun genauer analysieren. Wir betrachten den Fall, dass die Reibungskräfte proportional zur Geschwindigkeit sind, was
für kleine Geschwindigkeiten häufig der Fall ist. Damit ergibt sich dann
m ẍ = −kx − b ẋ ,
wobei b die Konstante ist, die die Stärke der dissipativen Kraft parametrisiert. Durch
Division mit m ergibt sich
ẍ + γ ẋ + ω02 x = 0 ,
mit ω02 = k/m und γ = b/m.
Wie bereits für die harmonische Schwingung diskutieren wir nicht das allgemeine mathematische Lösungsverfahren für diese Gleichung, sondern benutzen physikalisch motivierte Lösungsansätze. Dabei müssen wir zwischen einigen Grenzfällen unterscheiden.
3.2.1
Schwache Dämpfung
Mit schwacher Dämpfung bezeichnet man eine Schwingung, bei der durch die Reibungskräfte die Amplitude langsam verschwindet. Für diesen Fall machen wir den
Ansatz:
x(t) = exp(−βt) f (t)
wobei β eine positive, reelle Konstante ist und f (t) eine Funktion, die wir in einem
zweiten Schritt zu bestimmen haben.
29
3.2. Gedämpfte Schwingungen
Es gilt:
ẋ(t) = exp(−βt) (f˙(t) − βf (t))
ẍ(t) = exp(−βt) (f¨ − 2β f˙(t) + β 2 f (t))
Da exp(−βt) 6= 0, muss f (t) die folgende Gleichung erfüllen (aus ẍ + γ ẋ + ω02 x = 0):
f¨(t) + (γ + 2β) f˙(t) + (β 2 + ω 2 − βγ) f (t) = 0 .
0
Diese Gleichung hat die gleiche Struktur wie unsere Ursprungsgleichung. Wir können
aber β frei wählen, so dass wir durch γ/2 = β auf die Gleichung des harmonischen
Oszillators geführt werden:
f¨(t) + (ω 2 − γ 2 /4) f (t) = 0 .
0
ω02
Für
−
Frequenz
γ 2 /4
> 0 muss f (t) also einer gewöhnlichen Schwingungsgleichung mit der
ω=
q
ω02 − γ 2 /4
genügen. Durch die Dämpfung wird also auch die Frequenz verkleinert, wobei die
Korrekturen mit schwächerer Dämpfung verschwinden. Wir erhalten damit für f (t)
die Lösung
f (t) = x0 cos(ωt + ϕ)
und insgesamt
x(t) = x0 exp(−γt/2) cos(ωt + ϕ)
Auslenkung x(t)
0.08 m
0
-0.08 m
0
1
2
3
4
5
t [s]
Abbildung 3.3: Die durchgezogene Line zeigt die Amplitude einer gedämpften Schwingung mit x0 = 0.08m, ω0 = 10rad/s und γ = 0.5. Die gestrichelte Linien beschreiben
den zeitlichen Verlauf der maximalen Auslenkungen.
Die Abbildung 3.3 zeigt den Verlauf einer gedämpften Schwingung. Die Zeitskala der
Dämpfung τ wird durch γ festgelegt. Dies wird offensichtlich, wenn man x(t) in der
Form
x(t) = x0 exp(−t/τ ) cos(ωt + ϕ)
2
γ
schreibt, so dass τ = die Zeit ist, während der sich die maximale Auslenkung um
den Faktor 1/e verkleinert.
30
3.2.2
Kapitel 3. Schwingungen
Starke Dämpfung (Kriechfall)
Wenn die dissipative Kraft stärker wird, kann sie dazu führen, dass Oszillationen ganz
verhindert werden. Dieser Punkt ist erreicht, wenn γ 2 > 4ω02 gilt. In diesenm Fall lautet
die Bestimmungsgleichung für f (t):
f¨(t) − α2 f (t) = 0
(α2 = γ 2 /4 − ω02 > 0) .
Diese Gleichung hat die allgemeine Lösung
f (t) = A exp(−αt) + B exp(αt) ,
so dass sich für die Auslenkung
x(t) = exp (−γt/2) (A exp(−αt) + B exp(αt))
ergibt. Die Integrationskonstanten werden durch die Anfangsbedingungen
x(0) = A + B
ẋ(0) = B (α − γ/2) − A (α + γ/2)
bestimmt.
Auslenkung x(t)
0.08 m
stark
kritisch
0.06 m
0.04 m
0.02 m
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
t [s]
Abbildung 3.4: Vergleich eines stark (durchgezogene Linie) und eines kritisch
gedämpften Oszillators. Die Grundfrequenz ist ω0 = 10 rad/s und die Anfangsauslenkung beträgt in beiden Fällen 0.08 m. Für die starke Dämpfung ist γ = 25 s−1 und
für die kritische Dämpfung ist γ = 20 s−1 .
Der typischen Verlauf der Auslenkung eines stark gedämpften Systems ist in Abb. 3.4
dargestellt.
3.2.3
Kritische Dämpfung (Aperiodischer Grenzfall)
Zum Schluss diskutieren wir noch den Spezialfall γ = 2ω0 . Dies ist der Fall, bei dem die
ausgelenkte Masse am schnellsten an den Ausgangspunkt zurückkehrt (siehe Abb. 3.4).
Für die Funktion f (t) gilt nun einfach f¨ = 0, so dass wir f (t) = A+Bt erhalten. Damit
ist x(t) = exp (−γt/2)(A + Bt) Lösung der Bewegungsgleichung.
31
3.3. Erzwungene Schwingungen
Der Umstand, dass die kritische Dämpfung führt ein System am effektivsten in die
Ruhelage zurückführt, macht diese Art der Dämpfung interessant für technische Anwendungen. Daher wird in Systemen (z.B. Fahrwerk eines Autos, CD-Spieler etc.), die
eine effektive Dämpfung benötigen, versucht, den Fall kritischer Dämpfung zu realisieren.
3.3
Erzwungene Schwingungen
Bislang haben wir nur solche Oszillatoren betrachtet, die nach einer Anfangsauslenkung
sich selbst überlassen wurden. Häufig werden Schwingungen aber von periodischen
Kräften angeregt. Ein Beispiel einer solchen Anregung sind schwitzende Eltern, die
von ihren schaukelnden Kindern angefeuert (“höher!”) werden, ein gedämpftes System
zu stationären Oszillationen mit maximaler Auslenkung zu verhelfen.
Anregung
Auslenkung
t
Abbildung 3.5: Zeitlicher Verlauf einer harmonischen Kraft (durchgezogene Linie) und
der stationären Auslenkung (gestrichelte Linie) einer erzwungenen Schwingung.
Wir betrachten in diesem Abschnitt den einfachsten Fall der Anregung eines Oszillatorsystems, nämlich einer Anregung durch eine harmonische Kraft Fh = F0 cos(ωt).
Diese führt auf die Bewegungsgleichung
dx
F0
d2 x
+γ
+ ω02 x =
cos(ωt) .
(3.1)
2
dt
dt
m
Die obige Gleichung ist aus mathematischer Sicht eine lineare inhomogene Differenzialgleichung. Die allgemeine Lösung einer solchen DGL findet man dadurch,
dass man zu einer speziellen Lösung xi (t) von (3.1) die allgemeine Lösung xh (t) der
homogenen Differenzialgleichung ẍ + γ ẋ + ω02 x = 0 addiert.
Wir suchen eine spezielle Lösung, die den stationären Fall beschreibt. Abb. 3.5 zeigt
eine solche stationäre Lösung und die zugehörige anregende Kraft. Stationäre Schwingung und Anregung haben die gleiche Frequenz, sind aber gegeneinander phasenverschoben. Wir setzen daher eine Lösung der Form
x(t) = x0 cos(ωt − ϕ)
an, wobei ϕ die Phasendifferenz zwischen Anregung und Auslenkung beschreibt und
ω die Frequenz der Anregung ist. Die Amplitude x0 und die Phasenverschiebung ϕ
32
Kapitel 3. Schwingungen
zwischen Anregung und Auslenkung sind die Parameter, die wir zu bestimmen haben.
Durch Einsetzen in (3.1) erhalten wir:
(ω02 − ω 2 )x0 cos (ωt − ϕ) − ωγx0 sin (ωt − ϕ) =
F0
cos(ωt) .
m
Diese Gleichung muss für alle Zeiten erfüllt sein, insbesondere auch für die Fälle (ωt −
ϕ) = 0 und (ωt − ϕ) = π2 . Die Auswertung der Gleichung zu diesen Zeiten führt auf
zwei Gleichungen für die Unbekannten x0 , ϕ:
(ω02 − ω 2 )x0 =
−ωγx0 =
F0
cos ϕ
m
π
F
F0
0
cos
+ϕ =
sin ϕ .
m
2
m
Die Lösung dieses Gleichungssystems ist durch
x0 =
tan ϕ =
p
F0 /m
(ω02
ω2
− ω 2 )2 + ω 2 γ 2
und
ωγ
− ω02
gegeben. Die Phasendifferenz ϕ wird also im Gegensatz zu der Phase bei der harmonischen Schwingung nicht von den Anfangsbedingungen bestimmt sondern von den
physikalischen Eigenschaften des Systems.
3.3.1
Resonanz
Wir wollen nun die Abhängigkeit der Amplitude von der Anregung untersuchen.
Zunächst stellt man fest, dass die Auslenkung einfach proportional zur Stärke der
Kraft ist. Bei diesem Ergebnis sollte man aber berücksichtigen, dass das Potenzial im
generischen Fall nur für kleine Auslenkungen eine quadratische Form hat.
Spektakulär ist die Abhängigkeit von der Anregungsfrequenz ω. So zeigt insbesondere für schwache Dämpfung die Amplitude ein ausgeprägtes Maximum bei ω = ω0 .
Sie sollten sich aber auch bei diesem Ergebnis daran erinnern, dass die harmonische
Näherung häufig nur für kleine Amplituden zutreffend ist.
3.4
Überlagerung der Schwingungen
In diesem Abschnitt betrachten wir einen gedämpften Oszillator, der von zwei periodischen Kräften F1 (t) und F2 (t) angetrieben wird.
Wenn nun x1 (x2 ) die Lösung des Systems ist, das von der Kraft F1 (F2 ) angetrieben ist,
dann ist x(t) = x1 (t) + x2 (t) Lösung des Problems. Dies lässt sich leicht verifizieren,
denn
d2 x1 (t) d2 x2 (t)
d2
(x1 (t) + x2 (t)) =
+
2
dt
dt2
dt2
33
3.4. Überlagerung der Schwingungen
2
1
0
0
5
15
10
20
25
t
-1
-2
Abbildung 3.6: Überlagerung zweier Schwingungen mit gleicher Amplitude und
ähnlicher Kreisfrequenz. Die Parameter der Auslenkungen x1 , x2 sind gegeben durch:
ϕ1 = ϕ2 = 0, ω1 = 10 rad/s, ω2 = 10.5 rad/s, x1 = x2 = 1.
und analog für
dx1 (t) dx2 (t)
d
(x1 (t) + x2 (t)) =
+
dt
dt
dt
Damit erhalten wir:
d2 x
dx
+γ
+ ω02 x = F1 (t) + F2 (t) .
dt
dt
Das Ergebnis für die Auslenkung lässt sich also durch Addition der Lösungen des
einfach angeregten Oszillators bestimmen, d.h.
x(t) = x1 cos (ω1 t + ϕ1 ) + x2 cos (ω2 t + ϕ2 ) ,
wobei ω1 , ω2 die Anregungsfrequenzen des Oszillators sind. Die Tatsache, dass man
die Teillösungen einfach überlagern kann, liegt daran, dass die Amplitudengleichung
des harmonischen Oszillators eine lineare Differenzialgleichung ist. Homogene lineare
Differenzialgleichungen haben die Form
k X
dn
an n y(x) = 0
dx
n=0
wobei an beliebige Konstanten und y(x) eine beliebige Funktion sind.
34
3.4.1
Kapitel 3. Schwingungen
Schwebungen
Wenn die Frequenzen ω1 und ω2 sehr ähnlich sind, kommt es zu sog. Schwebungen.
Dieses Phänomen kann man direkt durch die oben angegeben Lösung von x(t) erklären.
Wir betrachten den Fall, dass die Amplitude der beiden Komponenten identisch sind,
so dass
x(t) = x0 [cos (ω1 t + ϕ1 ) + cos (ω2 t + ϕ2 )]
Dies können wir durch die Beziehung cos(A+B)+cos(A−B) = 2 cos A cos B umformen
in:
∆ω
∆ϕ
x = 2x0 cos(ω0 t + ϕ0 ) cos
t+
,
2
2
mit ω0 = 21 (ω1 + ω2 ) , ϕ0 = 21 (ϕ1 + ϕ2 ) , ∆ω = ω1 − ω2 und ∆ϕ = ϕ1 − ϕ2 . Die
Superposition führt also zu einer Modulation der Amplitude (siehe Abb. 3.6), die man
Schwebung nennt.
Schwebungen werden beispielsweise zum Stimmen von Instrumenten genutzt: Frequenzunterschiede zwischen einem von einer Stimmgabel vorgegebenen Ton und dem
Ton des Instruments bewirken Schwebungen, die durch die variable Lautstärke der
überlagerten Schwingungen hörbar sind.
3.5
Fourier-Reihen
Der vorangegangene Abschnitt hat gezeigt, dass man bei Überlagerung von harmonischen Anregungen einfach die Amplituden zu den einzelnen Anregungen addieren
kann, wobei die Zahl der Anregungsfrequenzen keine Rolle spielt.
Diese Eigenschaft der harmonischen Anregungen motiviert dazu, eine beliebige periodische Anregung durch eine Summe von harmonischen Anregungen darzustellen
(siehe Abb. 3.7 für das Beispiel einer Kippschwingung), so dass man entsprechend die
Einzelamplituden überlagern kann. Diese Art der Reihenentwicklung von periodischen
Funktionen geht auf Jean Baptiste Fourier zurück. Wir wollen Fourier-Reihen am Beispiel einer periodischen Kraft F (t), die auf einen gedämpften Oszillator angewendet
wird, einführen. Die Periodendauer von F (t) sei T = 2π
ω .
Die harmonischen Anregungen, die die Kraft F (t) ersetzen sollen, müssen ganzzahlige
Vielfache der Grundfrequenz ω sein, damit die Periode der Reihendarstellung und F (t)
kompatibel sind. Wir machen für F (t) den Ansatz:
F (t) =
∞
X
an cos (n ωt) + bn sin (n ωt) .
(3.2)
n=0
Damit wir eine explizite Reihenentwicklung daraus gewinnen, müssen wir nun die
Koeffizienten bestimmen. Dazu multiplizieren wir beide Seiten von (3.2) mit cos(p ωt)
35
3.5. Fourier-Reihen
1
0,8
0,6
0,4
0,2
0
0,5
0
1
1,5
2,5
2
3
t
Abbildung 3.7: Fourier-Entwicklung einer Kippschwingung (gelb). In rot (grün) ist die
Fourier-Reihe bis einschließlich n = 2 (n = 4) dargestellt.
(p ≥ 1) und integrieren über die volle Periode:
ZT
F (t) cos(p ωt) dt =
0
+
ZT
0
ZT
cos (p ωt)
∞
X
!
an cos (n ωt)
n=0
∞
X
cos(p ωt)
bn sin (n ωt) dt
dt
(3.3)
n=0
0
Die Integrale auf der rechten Seite der Gleichung (3.3) kann man unter Benutzung von
ZT
cos(p ωt) cos(n ωt) dt =
0
0
p 6= n
T /2 p = n
0
p 6= n
T /2 p = n
und
ZT
sin(pωt) sin(nωt) dt =
0
sowie
ZT
sin(pωt) cos(nωt) dt = 0
p, n
beliebig
0
leicht auswerten. Einen von Null verschiedenen Beitrag liefert lediglich der Summand:
ZT
0
ap cos2 (pωt) dt = ap
T
.
2
36
Kapitel 3. Schwingungen
Somit können wir also den Koeffizienten ap mit Hilfe von
2
ap =
T
ZT
F (t) ωs (pωt) dt
ZT
F (t) sin(pωt) dt
0
bestimmen.
Analog erhält man
2
bp =
T
0
mit b0 = 0.
Der Koeffizient a0 ist schließlich gegeben durch
1
a0 =
T
ZT
F (t) dt
0
und entspricht dem Mittelwert von F (t). Mit diesen Koeffizienten lässt sich die Funktion also als Summe von harmonischen Funktionen darstellen. So ergibt sich beispielsweise für die in Abb. 3.7 dargestellte Kippschwingung F (t) = aT0 t die Reihenentwicklung:
F (t) =
∞
a0 a0 X sin(nωt)
−
.
2
π n=0
n
Mit Hilfe der Reihenentwicklung können wir nun die Lösung eines gedämpften Oszillators angeben, der von einer periodischen nicht harmonischen Kraft angetrieben
wird. Sie ist einfach die Summe der Auslenkungen, die zu den einzelnen harmonischen
Anregungen gehören. Die Amplituden zu einer gegebenen Frequenz ωn wird durch die
zugehörigen Fourierkoeffizienten bestimmt.
Gerade und ungerade Funktionen
Die Berechnung der Fourierkoeffizienten wird im Fall gerader F (t) = F (+t) bzw.
ungerader F (t) = F (−t) wesentlich erleichtert: Die Fourierentwicklung einer geraden
Funktion muss natürlich auch gerade sein. Diese Eigenschaft trifft aber nur für die
Kosinusterme (cos(x) = cos(−x)) zu, so dass bn = 0 für beliebige n gilt. Analog gilt
an = 0 (n ≥ 0) für ungerade Funktionen.
3.6
Gekoppelte Schwingungen
Bislang haben wir uns auf solche Systeme beschränkt, die durch eine zeitabhängige Variable beschrieben werden können. In vielen Systemen ist die Situation aber komplexer,
häufig wechselwirken die Oszillatoren auch untereinander.
Das zweiteinfachste Modellsystem, das wir in diesem Kontext analysieren können, ist
ein System von zwei gekoppelten Oszillatoren.
Beispiele:
37
3.6. Gekoppelte Schwingungen
• Zwei Pendel, die durch eine Feder gekoppelt sind.
• Zwei Massen, die jeweils von einer Feder gehalten werden und durch eine dritte
Feder gekoppelt sind.
Als physikalisches Modellsystem betrachten wir ein CO2 Molekül.
Der Überlapp der Elektronenhüllen führt zur Bindung der beteiligten Atome, so dass
sich die Atome in einer Reihe anordnen. Die zentrale Position nimmt dabei das Kohlenstoffatom ein. Quantenmechanische Rechnungen zeigen, dass man die Bindungen
zwischen dem Kohlenstoff und den Sauerstoffatomen durch ein harmonisches Potenzial annähern kann.
Die Bewegung des Schwerpunktes des CO2 Moleküls ist gradlinig und gleichförmig, so
dass wir uns in erster Linie für die Relativbewegung der Atome interessieren. Durch
die Auslenkungen, die auf der Abbildung dargestellt sind, verändert sich die Lage des
Schwerpunktes gemäß:
MX
mx2
mx1
+
+
.
M + 2m M + 2m M + 2m
Wie üblich legen wir den Schwerpunkt in den Koordinatenursprung, so dass
mx1 + M X + mx2 = 0
erfüllt ist. Durch die obige Beziehung wird die Zahl der unabhängigen Variablen
auf zwei reduziert. Wir wählen die Auslenkungen der Sauerstoffatome x1 , x2 als unabhängige Variable, für die sich die Bewegungsgleichungen
mẍ1 = k(x − x1 )
und
mẍ2 = k(x − x2 )
ergeben, wobei die Stärke der harmonischen Bindung durch k parametrisiert wird.
Wenn man nun die Variable X eliminiert, ergibt sich:
m+M
1
ẍ1 = −kx1
= −αx1 − βx2
(3.4)
− kx2
mM
M
1
m+M
= −αx2 − βx1
(3.5)
− kx1
ẍ2 = −kx2
mM
M
k
mit α = k m+M
und β = M
.
mM
Die Gleichungen (3.4) und (3.5) bilden ein System gekoppelter Differenzialgleichungen.
Zur Lösung solcher Systeme muss man neue Variablen einführen, die die Gleichungen
entkoppeln. Für unser Beispiel ist das recht einfach. Wir führen dazu die Variablen
q1 = x1 + x2 und q2 = x1 − x2 ein, so dass sich
q̈1 + q̈2 = 2ẍ1 = −α(q1 + q2 ) − β(q1 − q2 )
und
q̈1 − q̈2 = −2ẍ1 = −α(q1 − q2 ) − β(q1 + q2 )
ergibt. Durch Addition und Subtraktion der beiden Gleichungen erhalten wir:
q̈1 = −(α + β) q1
und
q̈2 = −(α − β) q2
38
Kapitel 3. Schwingungen
Die Differenzialgleichungen entsprechen denen zweier einfacher harmonischer Oszillatoren und haben die Lösungen
1
2
2
q1 = q10 cos(ω1 t + ϕ1 )
ω1 = α + β = k
+
m M
k
q2 = q20 cos(ω2 t + ϕ2 )
ω22 = α − β =
m
Für die Auslenkungen der Sauerstoffatome ergibt sich also:
x1 (t) = x10 cos(ω1 t + ϕ1 ) + x20 cos(ω2 t + ϕ2 )
x2 (t) = x10 cos(ω1 t + ϕ1 ) − x20 cos(ω2 t + ϕ2 )
Die Konstanten x10 , x20 , ϕ1 , ϕ2 werden aus den Anfangsbedingungen für x1 , x2 und
den Anfangsgeschwindigkeiten bestimmt.
Sehr einfache Bewegungen ergeben sich für die Anfangsbedingungen (i) x10 = x0 ; x20 =
0 bzw. (ii) x20 = x0 ; x10 = 0. Die Lösungen in diesen beiden Fällen lauten:
(i) x1 (t) = x0 cos(ω2 t + ϕ2 ) ; x2 (t) = −x0 cos(ω2 t + ϕ2 )
(ii) x1 (t) = x0 cos(ω1 t + ϕ1 ) ; x2 (t) = x0 cos(ω1 t + ϕ1 )
Im Fall (i) sind die Bewegungen um den Winkel π phasenverschoben, d.h. die beiden
Sauerstoffatome schwingen gegeneinander. Im Fall (ii) schwingen beide Sauerstoffatome in Phase, d.h. sie schwingen synchron um die Gleichgewichtslage. Diese beiden
Lösungen nennt man Normalmoden des Systems. Das Verhältnis der beiden Frequenzen der Normalmoden ist 1.91, in guter Übereinstimmung mit Resultaten quantenmechanischer Rechnungen für zwei Grundschwingungen des CO2 Moleküls.
Bem.: Durch die einfache Struktur der Gleichungen ließ sicht recht einfach eine Koordinatentransformation angeben, die das System entkoppelt. Das Standardverfahren
für solche gekoppelten linearen Differenzialgleichungen wird im Skript zum mathematischen Vorkurs erläutert.
Kapitel 4
Quantenmechanik
4.1
Grundlagen der Quantenphysik
Die Frage, ob Materie unendlich oft teilbar ist, oder aber nur bis hin zu kleinsten unteilbaren Einheiten, wurde schon im antiken Griechenland behandelt (z.B. Demokrit
460 - 370 v. Chr.: “Urgründe des Alls sind die Atome und das Leere”). Ein umfassendes
Verständnis der Materie auf atomarer Skala wurde aber erst durch die Entwicklung
der Quantentheorie bzw. synonym der Quantenmechanik entwickelt. Die Quantenmechanik beschreibt Prozesse auf (sub-)atomarer Skala, die allerdings auch zu makroskopischen Phänomenen führen können. Ein Beispiel für ein solches makroskopisches
Quantenphänomen ist die Supraleitung, also der reibungsfreie Transport von Ladung,
die sich nur im Rahmen der Quantenmechanik verstehen lässt.
In diesem Kapitel wollen wir einen Überblick über die Bausteine der Materie und ihre
grundlegenden Eigenschaften geben.
4.1.1
Die Bausteine der Materie
Bei tiefen Temperaturen liegt Materie gewöhnlich als fest oder flüssig kondensiert vor.
Im kondensierten Zustand sind die Atome dicht gepackt. Bei Kristallen beobachtet
man sogar regelmäßige Anordnungen von Atomen.
Wenn man Materie aufheizt, geht sie in den gasförmigen Zustand über; entweder direkt
aus dem festen (Sublimation) oder aus dem flüssigen Zustand (Verdampfung). Dabei
bleiben, wie z.B. beim Wasserkochen, die Molekülbindungen erhalten.
Molekülbindungen kann man durch Bestrahlung mit Licht aufbrechen, wenn das Licht
eine geeignete Frequenz hat. Die Frequenzabhängigkeit der Absorption ist die Konsequenz der Quantennatur des Lichtes, wie wir bei der Diskussion des Photoeffekts
sehen werden. Durch Bestrahlung mit Licht kann man aber nicht nur Moleküle dissoziieren, sondern auch Atome in verschiedene Bestandteile zerlegen! Atome sind also
nicht unteilbar, sondern bestehen aus einem Atomkern und einer Elektronenhülle.
Elektronen haben die Masse me = 9.109 × 10−31 kg und besitzen die Ladung −e =
−1.602 × 10−19 C (1C = 1 Coulomb). Atome sind elektrisch neutral, d.h. die Teilchen
im Kern müssen die entgegengesetzt gleiche Ladung tragen. Wenn man Elektronen aus
39
40
Kapitel 4. Quantenmechanik
der Elektronenhülle entfernt, verbleibt ein mit +e geladenes Ion. Die Energie, die dazu
benötigt wird, ist von der Größenordnung 1eV = 1 Elektronenvolt = 1.602 · 10−19 J.
Wenn man alle Elektronen aus der Hülle entfernt, verbleibt der Atomkern. Im Vergleich
zu den Elektronen ist der Atomkern extrem schwer, selbst beim Wasserstoffatom ist
das Verhältnis zwischen Kernmasse und Elektronenmasse etwa 2000 : 1. Gleichzeitig
ist der Kern sehr kompakt, sein Durchmesser ist etwa 1/10000 des Abstandes von
Atomen im Festkörper.
4.1.2
Struktur des Atomkerns
Während Elektronen Elementarteilchen sind, sind die Atomkerne aus positiv geladenen
Teilchen, den Protonen, und elektrisch neutralen Teilchen, den Neutronen, zusammengesetzt. Die verschiedenen Elemente unterscheiden sich durch die Ladung des Kerns.
Für jedes Element gibt es dann noch eine Anzahl von Isotopen, die die gleiche Kernladungszahl, aber verschiedene Massen haben. Die Massenzahl A des Kerns ist die
Summe der Protonen- und Neutronenzahl während die Kernladungszahl die Zahl der
Protonen angibt. Ähnlich wie man Elektronen aus der Elektronenhülle entfernen kann,
ist es auch möglich, Protonen bzw. Neutronen vom Kern zu entfernen. Man benötigt
aber Energien in der Größenordnung von 1M eV = 106 eV .
Um die verschiedenen Isotope eines Elements zu unterscheiden, wird die folgende Notation angewandt:
Aց
12 C
6
Zր
C = chemisches Symbol “Kohlenstoff” (Carbon)
Das
12 C
Atom dient auch zur Festlegung der atomaren Masseneinheit (amu):
1amu = (1.661 × 10−27 )kg =
1
Masse eines 12 C Atoms
12
Selbst Protonen und Neutronen sind keine Elementarteilchen, sondern aus sog. Quarks
zusammengesetzt, wie man durch Streuexperimente mit hochenergetischen Teilchen
(einige GeV ≡ 109 eV ) zeigen kann. Nach dem heutigen Stand der Forschung sind
Quarks wie die Elektronen tatsächlich elementare Teilchen. Es gibt sechs verschiedene
Quarks, die aber nicht als freie Teilchen beobachtbar sind: Sie treten immer paarweise
oder zu dritt auf.
4.1.3
Radioaktivität
Nicht alle Isotope eines Elements sind stabil. Für Wasserstoff existieren drei verschiedene Isotope mit 0, 1, 2 Neutronen. 21 H nennt man Deuterium oder auch schweren
Wasserstoff. Das 31 H Isotop (“Tritium”) ist im Gegensatz zu den beiden anderen Isotopen nicht stabil. Es besitzt eine Halbwertszeit von 12 Jahren, d.h. nach dieser Zeit
ist die Hälfte der Tritium Atome in 31 He umgewandelt worden.
41
4.1. Grundlagen der Quantenphysik
Diese spontane Umwandlung von Kernen nennt man Radioaktivität (Becquerel, 1896).
Durch die verschiedenen Zerfallsprozesse wird Strahlung emittiert. Man unterscheidet
dabei drei Arten von Strahlung
• α-Strahlung: Sie besteht aus 42 He-Kernen, die leicht abgeschirmt werden können.
Durch die Emission von α-Teilchen reduziert sich Z um 2 und A um 4 Einheiten.
204
(Bsp. 208
84 P o →82 P b)
• β-Strahlung besteht aus Elektronen oder Positronen (Ladung +e). Sie ist gut
abschirmbar, kann aber einige mm Plastik durchdringen. Durch die Emission von
β-Strahlung wird tritt keine Änderung der Massenzahl auf, die Kernladungszahl
wird aber geändert:
40
19 K
40
21 Se
→
→
40
20 Ca
40
20 Ca
(β − -Strahlung)
(β + -Strahlung)
• γ-Strahlung besteht aus hochenergetischen Photonen, die sogar Blei durchdringen können. A und Z bleiben bei der Emission von γ-Strahlung erhalten.
4.1.4
Radioaktiver Zerfall
Im Gegensatz zur klassischen Physik sind die Aussagen in der Quantenmechanik nicht
deterministisch. Wir können also vorhersagen, dass nach 12 Jahren die Hälfte aller
Tritium Atome in 3 He umgewandelt worden ist, wann dies aber exakt für ein einzelnes
Atom der Fall ist, entzieht sich unserer Kenntnis. Wir kennen aber für eine Probe
radioaktiven Materials die Zerfallsrate, d.h. die Anzahl der pro Zeiteinheit zerfallenen
Kerne:
−
dN
= λN
dt
Die Größe λ ist die sog. Zerfallskonstante. Die Lösung dieser Differentialgleichung ist
durch
N (t) = N0 e−λt
gegeben. Nach einer Zeit t = λ−1 , der Zerfallszeit, ist die ursprüngliche Anzahl der
Atome im Mittel auf Ne zurückgegangen (e = 2.718).
Eine weitere wichtige Größe ist die Halbwertszeit τ1/2 , also die Zeit nach der die
Hälfte der Atome zerfallen ist. Aus
1
= exp (−λ τ1/2 )
2
ergibt sich
τ1/2 =
0.693
.
λ
Man beobachtet eine sehr große Variabilität der Halbwertszeiten bis hin zu 2.1 × 1015
Jahren (144 N d: Neodymium). Alle Kerne mit A > 120 sind instabil, allerdings nur in
dem Sinn, dass bei ihrer Spaltung Energie frei wird, und nicht, dass man den spontanen
Zerfall der Kerne auf experimentell realisierbaren Zeitskalen beobschten kann. Durch
radioaktive Strahlung wird eine große Menge Energie transportiert. So werden z.B.
42
Kapitel 4. Quantenmechanik
Abbildung 4.1: Experimenteller Aufbau zum Photoeffekt: Das einfallende Licht trifft
auf eine Metallplatte und ionisiert die Metallatome. Die gelösten Elektronen werden
im Gegenfeld abgebremst und treffen bei ausreichend hoher Energie auf den Kollektor.
beim Zerfall von 238 U α-Teilchen mit einer kinetischen Energie von 4.197M eV frei. Dadurch können α-Teilchen Atome in ihrer Umgebung ionisieren und Molekülbindungen
aufbrechen, wodurch die verheerende Wirkung radioaktiver Strahlung auf biologische
Zellen bedingt ist.
Es gibt verschiedene Größen, die die Stärke der Radioaktivität einer Probe charakterisieren, wie die sog. Aktivität einer Probe. Die Aktivität einer Probe wird in Becquerel
= 1Bq = 1 Zerfall pro Sekunde angegeben.
R=−
4.2
dN
= λN0 e−λt = λN
dt
Photonen
Genauso wie Materie ist auch Licht nicht unendlich oft teilbar, sondern stellt einen
Strom aus Teilchen dar, die man Photonen nennt. Jedes Photon besitzt eine wohldefinierte Menge an Energie, die man Energiequant nennt. (Für Photonen wird auch
der Begriff Lichtquant verwendet). Gleichzeitig besitzt Licht aber auch Wellencharakter, wie wir im vorangegangenen Abschnitt an Hand der Beugungs- und Interferenzphänomene gesehen haben. Die Eigenschaft, dass das Licht gleichzeitig Wellenund Teilchencharakter besitzt, nennt man Welle-Teilchen Dualismus.
4.2.1
Der Photoeffekt
Wie wir in der Einleitung zu diesem Kapitel bemerkt haben, kann Licht Atome ionisieren. Wenn ein Photon durch das Atom absorbiert, ein Elektron emittiert und ein
ionisiertes Atom zurückgelassen wird, nennt man dies “Photoelektrischen Effekt”. Der
Nachweis des Photoeffekts geschieht im folgenden klassischen Aufbau: Man legt eine
43
4.2. Photonen
Abbildung 4.2: Verlauf der Gegenspannung in Abhängigkeit von der Frequenz des
einfallenden Lichtes.
Spannung zwischen zwei metallische Platten an. Durch das elektrische Feld werden
die aus der Anode emittierten Elektronen abgebremst, so dass ausschließlich solche
Elektronen auf die Kathode treffen, die ausreichend viel kinetische Energie besitzen.
Die gemessene Stromstärke ist proportional zur Intensität der Lichtquelle. Durch die
Gegenspannung kann man aber die maximale kinetische Energie der freien Elektronen
bestimmen: Die Elektronen erreichen nur dann die Kathode, wenn Ekin ≥ qU ist.
Damit kann man aus der Spannung U in Volt, bei der der Strom gerade verschwindet,
die maximale kinetische Energie der Photoelektronen bestimmen.
Die Abhängigkeit von Emax von der Frequenz des Lichtes ist in Abb 4.2.
Wenn man die lineare Funktion bis hin zu ν = 0 extrapoliert, erhält man eine negative Energie von einigen eV . Diese Energie ϕ hängt vom Material der Anode ab, die
Steigung der Gerade ist dagegen universell und hat den Wert
h = 4.1 × 10−15 eV /Hz = 6.6 × 10−34 Js
Diese Beobachtungen lassen sich erklären, wenn man folgende Annahmen über Photonen macht:
1. Die Energie des Lichts setzt sich aus diskreten Einheiten, den Photonen, zusammen.
2. Für eine feste Frequenz haben alle Photonen dieselbe Energie.
3. Ein Photon der Frequenz ν besitzt die Energie hν.
Die universelle Konstante h nennt man das Planck’sche Wirkungsquantum. Mit
der Beziehung aus 3. gilt dann Emax = hν − ϕ, so dass mit ϕ die Austrittsarbeit des
Elektrons bezeichnet wird.
4.2.2
Impuls des Photons: Der Compton-Effekt
Beim Photoeffekt haben wir bislang die Erhaltung des Impulses nicht berücksichtigt
Da die austretenden Elektronen einen Impuls besitzen, der der Ausbreitung der Elektronen entgegengesetzt ist, muss ein Impulsübertrag stattgefunden haben und zwar
44
Kapitel 4. Quantenmechanik
hν
(a)
v
(b)
hν’
Abbildung 4.3: (a) Ein Photon mit der Frequenz ν trifft auf ein ruhendes Elektron. (b)
Nach dem frontalen Stoß bewegt sich das Elektron mit Geschwindigkeit v, während
das sich Photon mit der Frequenz ν ′ in die entgegengesetzte Richtung bewegt.
vom Photon auf die metallische Platte. Wegen der im Vergleich zum Elektron großen
Masse der Platte wird diese nicht nennenswert beschleunigt.
Eine andere Situation ergibt sich aber bei der Streuung von Licht an freien Elektronen.
In diesem Fall müssen wir neben der Energie- auch die Impulserhaltung berücksichtigen.
Es stellt sich daher die Frage: Was ist der Impuls eines Photons mit Wellenlänge λ?
Wenn man naiv die Beziehung zwischen kinetischer Energie und Impuls klassischer
Teilchen ansezten würde, d.h. pc = 2 Evkin = me v, wie sie für das Elektron gilt, würde
der Impuls des Photons 2hν/c sein. Dies gilt aber nur, wenn sich die Teilchen mit einer
Geschwindigkeit v ≪ c bewegen, was offensichtlich für Photonen nicht der Fall ist. Der
korrekte relativistische Ausdruck für den Impuls des Photons lautet
pν =
hν
c
bzw.
pν =
h
,
λ
also die Energie des Photons durch die Lichtgeschwindigkeit. Die relativistische Beziehung unterscheidet sich um einen Faktor 2 von dem Ausdruck, den man klassisch
erwartet.
Wir betrachten nun die folgende Situation (siehe Abb. 4.3): Ein Elektron wird frontal
von einem Photon mit der Energie hν gestoßen. Das Elektron besitze nach der Kollision
die Geschwindigkeit v ≪ c und das Photon die Frequenz ν ′ . Dann gilt:
(i) Impulserhaltung:
hν ′
hν
=−
+ me v
c
c
(ii) Energieerhaltung:
1
hν = hν ′ + me v 2
2
Aus diesen beiden Erhaltungsgrößen lässt sich die Änderung der Wellenlänge berechnen:
λ − λ′ =
2h
me c
45
4.3. Teilchen-Welle Dualität
Wir haben dabei benutzt, dass wegen v ≪ c die Näherung 4h2 νν ′ = m2e v 2 c2 − 14 m2e v 4 ≈
m2e v 2 c2 verwendet werden kann1 . Wenn wir den Fall betrachten, dass das Elektron nicht
frontal gestoßen wird, ergibt sich
λ′ − λ =
h
(1 − cos Θ)
me c
Die Größe mhe c nennt man Compton-Wellenlänge. Sie hat den Wert 2.43 × 10−12 m,
was im Vergleich zu sichtbarem Licht (gelbes Licht ≃ 500 nm = 5 × 10−7 m) sehr klein
ist. Wenn man den Energieübertrag betrachtet, ergibt sich:
1
(1 − cos Θ)
1
−
=
hν ′ hν
me c2
wobei me c2 die Ruheenergie des Elektrons ist. Es gilt me c2 = 511keV.
4.3
Teilchen-Welle Dualität
Photo- und Comptoneffekt zeigen den Teilchencharakter von Photonen. Gleichzeitig
hat Licht aber auch Wellencharakter, wie Beugungsexperimente zeigen.
Wenn man diese Beugungsexperimente für sehr niedrige Lichtintensitäten durchführt,
sieht man, dass die Abbildung eine körnige Struktur hat, die durch das Auftreten
einzelner Photonen hervorgerufen wird. Dies ist so zu interpretieren, dass die Wellenbeschreibung des Lichtes uns lediglich die Wahrscheinlichkeit dafür voraussagt, wo
ein einzelnes Photon auf den Schirm treffen wird.
Die Teilchen-Welle Dualität spielt für praktische Anwendungen nur in einem Bereich
der Wellenlänge von 10−5 m (Infrarot) bis 10−11 m (Röntgen) eine Rolle. Für größere
Wellenlängen ist die Energie von einzelnen Photonen zu niedrig, um mit der Materie
wechselzuwirken. Für Wellenlängen kleiner als 10−11 m wird es unmöglich, Objekte so
zu platzieren, dass Beugungsmuster erzeugt werden. Nichtsdestotrotz spielt gerade die
Röntgenbeugung bei der Strukturaufklärung von Materie eine wichtige Rolle.
Die Teilchen-Welle Dualität gilt aber nicht nur für Photonen, sondern ist eine allgemeine Eigenschaft der Materie. De Broglie hat angenommen, dass für Elektronen die
gleiche Relation wie für Photonen gilt, also
λ=
h
pe
wobei pe der relativistische Impuls des Elektrons ist. Diese Annahme ist experimentell
bestätigt worden.
4.3.1
Die Unschärferelation
Eine aus der Optik bekannte Tatsache ist, dass man Licht nicht exakt in einem Punkt
fokussieren kann. Die Beugung des Lichtes bestimmt immer die kleinstmögliche Abbildung.
46
Kapitel 4. Quantenmechanik
Für die Anordnung
gilt, dass der kleinste dunkle Beugungsring den Durchmesser λ/ sin Θ hat, also ist der
kleinstmögliche Radius der Abbildung λ.
Was bedeutet diese Auflösung für ein einzelnes Photon? Wenn wir davon ausgehen,
dass sich das Photon im 0ten Beugungsmaximum befindet, können wir den Ort des
Photons mit einer Genauigkeit von δx = 2λ/ sin Θ bestimmen.
Den Impuls des Photons können wir ebenfalls nur mit endlicher Genauigkeit bestimmen: Das Photon bewegt sich mit einem Winkel zwischen −Θ und Θ relativ zur xAchse. Da der Impuls des Photons hν
c ist, liegt der Wert der x-Komponente zwischen
±hν sin Θ/c. Daher gilt für das Produkt von Impuls- und Ortsunschärfe
δx · δpx ≃
λ
hν sin Θ
hνλ
·
=
=h
sin Θ
c
c
d.h. die Unschärfe hängt nur von der universellen Konstante h ab. Die obige Relation besagt, dass man Ort und Impuls eines Photons nicht gleichzeitig mit beliebiger
Genauigkeit bestimmen kann.
Man kann die Unschärferelation auch theoretisch herleiten. Wenn ∆x , ∆px die mittlere
quadratische Abweichung der x-Koordinate bzw. des Impulses in x-Richtung bezeichnet, gilt
∆x∆px ≥
h
~
=
2
4π
Analog gilt: ∆y∆py ≥ ~2 und ∆z∆pz ≥ ~2 . Aber nicht nur gleichzeitige Orts- und Impulsbestimmungen haben eine endliche Genauigkeit, sondern auch gleichzeitige Energieund Zeitmessungen:
1
∆E∆t ≥ ~ .
2
Dies hat z.B. zur Folge, dass bei radioaktiven Kernen mit endlicher Lebensdauer die
Energie der emittierten Strahlung in einem Intervall endlicher Breite ∆E um den
Mittelwert verteilt ist.
4.4
Die Schrödinger-Gleichung
Im vorangegangenen Abschnitt haben wir gesehen, dass mikroskopische Teilchen gleichzeitig auch Wellencharakter haben. Diese Tatsache wirft zwei Fragen auf:
1. Wie interpretiert man Materie, wenn man die quantenmechanische Wellenfunktion an einem bestimmten Ort und zu einem bestimmten Zeitpunkt kennt?
2. Welche Differentialgleichung beschreibt die Materiewellen?
Genau diese Fragen werden wir in diesem Abschnitt diskutieren.
1
Die obige Beziehung gilt exakt, wenn man auch für das Elektron die relativistischen Ausdrücke
für Energie (E = mc2 (γ − 1); γ = √ 1 2 ) und Impuls (p = γmv) verwendet.
1−(v/c)
47
4.4. Die Schrödinger-Gleichung
4.4.1
Die Wellenfunktion eines freien Teilchens
Im Kapitel über Wellenausbreitung haben wir gesehen, dass man Wellen in großem
Abstand von der Quelle immer als ebene Wellen approximieren kann. Wenn wir annehmen, dass sich die Welle in x-Richtung ausbreitet, kann man eine solche ebene
Welle durch
ξ = ξ0 cos(ωt − kx)
beschreiben, wobei ξ0 die Amplitude, ω die Frequenz und k die Wellenzahl bezeichnet.
Außerdem erinnern wir uns daran, dass bei realen Wellen nicht nur eine einzige Frequenz vorliegt, sondern dass die Frequenzen in einem schmalen Band um die mittlere
Frequenz verteilt sind.
Wir machen einen ähnlichen Ansatz für die Beschreibung von Materie, benutzen allerdings die komplexe Form der Wellenfunktion
ψ = ψ0 ei(ωt−kx)
wobei i =
√
(4.1)
−1 und eix = cos(x) + i sin(x) (vgl. Taylorreihen).
Dispersionsrelation
Die Wellenfunktion (4.1) muss mit der Physik von Photonen und Materiewellen kompatibel sein, wenn sie die tatsächlich gesuchte Wellenfunktion ist. Dies wollen wir nun
überprüfen. Die Energie eines Photons ist gegeben durch
E = hν = ~ω .
Wir nehmen an, dass dieser Ausdruck auch für massive Teilchen zutreffend ist. Die
2
kinetische Energie eines Teilchen der Masse m ist mv
2 , so dass
ω=
mv 2
2~
Die de Broglie-Beziehung besagt, dass einem Teilchen mit Impuls p die Wellenlänge
λ = hp zugeordnet wird. Damit erhalten wir für ein nicht-relativistisches massives
Teilchen
mv =
so dass die Dispersionsrelation ω =
~k 2
2m
h
= ~k
λ
folgt.
Wenn wir annehmen, dass das Teilchen durch ein Wellenpaket beschrieben wird, so ist
die Geschwindigkeit des Teilchens durch Gruppengeschwindigkeit
vg =
~k
dω
=
=v
dk
m
gegeben. Die Gruppengeschwindigkeit stimmt also wie erwartet mit der Teilchengeschwindigkeit überein, so dass der Ansatz (4.1) konsistent mit dem Teilchenbild ist.
48
Kapitel 4. Quantenmechanik
4.4.2
Interpretation der Wellenfunktion
Die Wellenfunktion beschreibt die Wahrscheinlichkeit, ein Teilchen an einem bestimmten Ort zu einer bestimmten Zeit zu finden. Diese Interpretation wurde experimentell
verifiziert.
Genauer gilt:
“Die Wahrscheinlichkeit zu einer Zeit t in einem infinitesimalen Intervall zwischen
x und x + dx zu finden, ist proportional zu dx und dem Betragsquadrat der
Wellenfunktion bei (x, t).”
Wir bezeichnen mit p(x, t)dx die Wahrscheinlichkeit das Teilchen zur Zeit t zwischen
x und x + dx zu finden. Dann gilt2
p(x, t) ∝ ψ ⋆ (x, t) ψ(x, t)dx
Wir haben gesehen, dass durch die Wellenfunktion (4.1) ein Teilchen mit der Geschwindigkeit v beschrieben wird. Gleichzeitig gilt
p(x, t)dx ∝ ψ02 dx
d.h. die Wahrscheinlichkeit, ein Teilchen an einem beliebigen Ort zu einer beliebigen
Zeit zu finden, ist konstant. Damit ist die Ortsunschärfe ∆x = ∞, so dass trotz ∆p = 0
(das Teilchen hat exakt die Geschwindigkeit v!) die Heisenberg’sche Unschärferelation
erfüllt werden kann.
4.4.3
Normierung
Bislang haben wir p(x, t) nur bis auf eine Proportionalitätskonstante bestimmt. Da
durch p(x, t) die Wahrscheinlichkeitsamplitude für ein einzelnes Teilchen bestimmt
wird, muss p(x, t) normierbar sein, d.h.
Z∞
Z∞
p(x, t) dx =
ψ ⋆ ψ dx = 1
−∞
−∞
Diese Bedingung führt für den Ansatz ebener Wellen zu Problemen, da
Z∞
Z∞
2
dx = 1
p(x, t) dx = ψ0
−∞
ψ02
−∞
gelten muss, was gleichbedeutend mit
= 0 ist. Das Problem der Normierung lässt
sich durch folgende Annahme beseitigen:
ψ(x, t) = ψ0 ei(ωt−kx)
sei die Approximation einer Wellengruppe mit sehr schmalem Impulsintervall. Die Approximation sei gültig auf dem Intervall von [−L, L]. Damit ist ψ(x, t) normiert, wenn
ψ0 = √12L gilt. Dieses Ergebnis besagt auch, dass die Wellenfunktion die Dimension
1
[ψ(x, t)] = [Länge]− 2 hat.
2
Es sei z = x + iy eine komplexe und x, y reell. Dann ist z ⋆ = x − iy die zu z komplex konjugierte
Zahl.
49
4.4. Die Schrödinger-Gleichung
4.4.4
Die Schrödinger-Gleichung
Nachdem wir eine geeignete Wellenfunktion zur Beschreibung eines freien Teilchens
gefunden haben, wollen wir nun die Differentialgleichung bestimmen, deren Lösung
durch ψ(x, t) gegeben ist. Dazu betrachten wir die partiellen Ableitungen der Wellenfunktionen nach dem Ort und der Zeit.
Die erste partielle Ableitung nach x ergibt:
∂ψ(x, t)
= −ik ψ0 ei(ωt−kx)
∂x
und die zweite Ableitung
∂ 2 ψ(x, t)
= −k2 ψ0 ci(ωt−kx) = −k2 ψ(x, t) .
∂x
Für partielle Ableitung nach der Zeit ergibt sich:
∂ψ(x, t)
= iω ψ0 ci(ωt−kx) = iωψ(x, t)
∂x
Wenn wir zusätzlich die Dispersionsrelation ω =
−
~k 2
2m
ausnutzen, erhalten wir:
~2 ∂ 2 ψ(x, t)
~ ∂ψ(x, t)
=
2
2m
∂x
i
∂t
Dies ist die Schrödingergleichung für ein freies Teilchen.
4.4.5
Bewegung in einem zeitunabhängigen Potential
Im nächsten Schritt wollen wir die quantenmechanische Beschreibung eines Teilchens
in einem zeitunabhängigen Potential untersuchen. Zur Vereinfachung der Diskussion
betrachten wir ein zeitunabhängiges Potential, das nur von der x-Koordinate abhängt,
also U = U (x).
Wenn wir die Schrödinger-Gleichung für ein freies Teilchen betrachten, ergibt sich für
die linke Seite
−
~2 ∂ 2 ψ(x, t)
(~k)2
1
=
ψ(x, t) = mv 2 ψ(x, t)
2m
∂x2
2m
2
wobei wir die Relation ~k
m = v benutzt haben. Dieser Ausdruck ist also die klassische
kinetische Energie des Teilchens multipliziert mit der Wellenfunktion. Für die rechte
Seite der Gleichung ergibt sich
~ ∂ψ(x, t)
= ~ω ψ(x, t)
i
∂t
also die Energie des Teilchens multipliziert mit der Wellenfunktion. Für ein freies
Teilchen stimmen kinetische und Gesamtenergie überein. Diese Form suggeriert, dass
50
Kapitel 4. Quantenmechanik
die Schrödingergleichung bei einem Teilchen, das sich in einem Potential U (x) bewegt,
die Form
−
~ ∂ψ(x, t)
~ ∂ 2 ψ(x)
+ U (x)ψ(x) =
2m ∂x2
i
∂t
besitzt. Diese Form der Schrödingergleichung hat sich für nicht-relativistische Teilchen
als korrekt erwiesen, d.h. sie liefert ähnlich wie die Newton-Gleichungen für makroskopische Teilchen, sehr gute Vorhersagen solange v ≪ c.
4.4.6
Stationäre Zustände
Die Zeitunabhängigkeit des Potentials stellt eine große Erleichterung bei der Berechnung der Lösung der Schrödingergleichung dar, da man in diesem Fall den orts- und
zeitabhängigen Teil der Wellenfunktion unabhängig voneinander bestimmen kann.
Wir machen dazu den Ansatz ψ(x, t) = ϕ(x)ρ(t), d.h. zeit- und ortsabhängiger Anteil
faktorisieren. Wenn wir diesen Ansatz in die Schrödingergleichung einsetzen, erhalten
wir
−ρ
~2 d2 ϕ
dρ
+ U (x)ρϕ = −iϕ~
,
2
2m dx
dt
so dass sich durch Division mit ρϕ
~ dρ
1 ~ d2 ϕ
+ U (x) = −i
−
ϕ 2m dx2
ρ dt
{z
}
|
| {z }
x−abh.
zeitabh.
ergibt. Die linke Seite der Gleichung ist zeitunabhängig während die rechte Seite nicht
von der x-Koordinate abhängt. Damit kann die Gleichung nur dann erfüllt sein, wenn
beide Seiten denselben konstanten Wert annehmen.
Wenn wir diese Konstante E nennen, erhalten wir die beiden folgenden Gleichungen
−
~2 d2 ϕ
+ U (x)ϕ = Eϕ
2m dx2
für den ortsabhängigen Teil und
~ dρ
= Eρ
i dt
für ρ(t). Die zeitabhängige Gleichung wird offensichtlich durch
ρ(t) = eiEt/~
gelöst. Damit gilt für beliebige Zeiten ρρ⋆ = 1, so dass automatisch ψ(x, t) durch
Normierung von ϕ(x) normiert wird. Für zeitunabhängige Potentiale besteht also der
nichttriviale Teil der Lösung der Schrödingergleichung darin, eine Lösung ϕ(x) für die
stationäre Schrödingergleichung
−
zu finden.
~2 d2 ϕ
+ U (x)ϕ = Eϕ
2m dx2
4.5. Teilchen in eindimensionalen Potentialen
4.5
51
Teilchen in eindimensionalen Potentialen
Wir werden in diesem Abschnitt die Physik von Teilchen in eindimensionalen stückweise
konstanten Potentialen untersuchen. Diese Potentiale dienen als Modellsysteme für
realistischere Potentialformen. Die Untersuchung dieser einfachen Potentialformen hat
den Vorteil, dass die Schrödingergleichung verhältnismäßig einfach zu lösen ist. Gleichzeitig sind diese Modellsysteme aber auch geeignet, um grundlegende Phänomene der
Quantenmechanik zu studieren.
Für diese Form des Potentials nimmt die stationäre Schrödingergleichung die einfache
Form
~2 d2 ϕ
+ U ϕ = Eϕ
2m dx2
2m
bzw. ϕ′′ + 2 (E − U )ϕ = 0
~
−
an. Damit ergeben sich je nach Vorzeichen von (E − U ) die folgenden allgemeinen
Lösungen der Schrödingergleichung
• 1. Fall: (E − U ) < 0:
Dieser Fall ist in der klassischen Mechanik nicht sinnvoll definiert, da im Rahmen der klassischen Mechanik die Gesamtenergie nicht kleiner als die potentielle
Energie des Teilchens sein kann. In der Quantenmechanik dagegen spielen, wie
wir an konkreten Realisierungen des Potentials sehen werden, auch Lösungen der
Schrödingergleichung für diesen Fall eine Rolle.
Die allgemeine Lösung der Schrödingergleichung für (E − U ) < 0 lautet:
ϕ(x) = Ae−αx + Beαx
mit α =
√
2m(U −E)
.
~
Der Koeffizient α hat die Dimension 1/Länge.
• 2. Fall: (E − U ) > 0:
In diesem Fall werden die Lösungen der Schrödingergleichung durch ebene Wellen
beschrieben:
ϕ(x) = Ae−iαx + Beiαx
mit α =
4.5.1
√
2m(E−U )
.
~
Der endliche Potentialtopf
Als erstes Modellsystem betrachten wir den sog. Potentialtopf, der in der obigen Abbildung dargestellt ist. Diese Form des Potentials können wir als eine (grobe) Näherung
für das tatsächliche Potential annehmen, wenn ein Teilchen in einem bestimmten Abschnitt gebunden ist.
Für den Fall, dass das Teilchen die Energie E < U0 besitzt, kann man es als zwischen 0
und L gebunden ansehen. Der Wert |U0 −E| entspricht gleichzeitig der Bindungsenergie
52
Kapitel 4. Quantenmechanik
Abbildung 4.4: Verlauf des endlioh tiefen Potentialtopfs.
des Teilchens, da genau diese Energie nötig ist, um das Teilchen aus dem Potentialtopf
zu befreien.
Innerhalb des Potentialtopfes gilt (E − U ) > 0, so dass gemäß der obigen Diskussion
die Lösung der Schrödingergleichung durch eine ebene Welle beschrieben wird. Für
x ≤ 0 und x ≥ L lautet die allgemeine Form der Lösung ϕ(x) = Ae−αx + Beαx .
Damit aber die Lösung der Schrödingergleichung normierbar bleibt, muss B = 0 für
x ≥ L gelten. Wir erhalten daher eine exponentiell abklingende Amplitude im klassisch
verbotenen Bereich. Analog muss A = 0 für x < 0 gelten. Insgesamt ergeben sich also
folgende Teillösungen des Problems:
• x ≤ 0: In diesem (klassisch verbotenen) Bereich lautet die Wellenfunktion:
ϕI (x) = Beαx
• 0 ≤ x ≤ L: In diesem (klassisch erlaubten) Bereich ist die allgemeine Lösung der
Wellenfunktion durch
ϕII (x) = Ceikx + De−ikx
gegeben.
• x > L In diesem (klassisch verbotenen) Bereich ist die allgemeine Lösung der
Wellenfunktion durch:
ϕIII (x) = Ae−αx
gegeben.
Die Bestimmung der Koeffizienten A, B, C, D ist möglich, wenn man die Stetigkeit
der Wellenfunktion und der ihrer ersten Ableitung bei x = 0, L ausnutzt.
Diese Bedingungen müssen erfüllt sein, damit die Wellenfunktion für ein Potential mit
endlichem Sprung Lösung der Schrödingergleichung sein kann. Damit erhalten wir die
Gleichungen ϕI (0) = ϕII (0) und ϕII (L) = ϕIII (L). Zwei weitere Gleichungen ergeben
sich aus der Stetigkeit der ersten Ableitungen bei x = 0, L. Die explizite Bestimmung
der Koeffizienten führt auf eine transzendente Gleichung, die nur numerisch ausgewertet werden kann. Wir halten aber fest, dass die Koeffizienten A, B nicht verschwinden,
53
4.5. Teilchen in eindimensionalen Potentialen
Abbildung 4.5: Wahrscheinlichkeitsdichten im endlichen Potentialtopf, für die drei
energetisch günstigsten Zusände.
d.h. im qualitativen Unterschied zur klassischen Mechanik dringt das Teilchen also
auch in den Bereich mit x > L bzw. x < 0 ein. Dieses Phänomen, das zu den wichtigen
Ergebnissen der Quantenmechanik gehört, wollen wir im Folgenden genauer untersuchen.
4.5.2
Die Potentialbarriere
Wir betrachten das in Abb. 4.6 dargestellte stückweise konstante Potential. Zwischen
den Regionen A (x < 0) und B (x > L) liegt eine Potentialbarriere der Höhe U0 . Wenn
das Teilchen eine positive Energie E < U0 besitzt, läuft die Welle bis zur Potentialbarriere, wo sie teilweise reflektiert und transmittiert wird.
In dem Abschnitt A hat die Welle daher die Form
ψA = ψ0 ei(ωt−kx) + R ei(ωt+kx)
mit ω = E/~ und der Wellenzahl k = 2π/~ =
Welle die Form
ψB = T ei(ωt−kx)
√
2mE/~. In Abschnitt B habe die
54
Kapitel 4. Quantenmechanik
Abbildung 4.6: (a) Ein Elektron mit Energie E trifft auf eine Potentialbarriere der Höhe
U0 . (b) Darstellung der Wahrscheinlichkeitsamplitude für die Potentialbarriere. Durch
die Überlagerung der einlaufenden und reflektierten Welle im Bereich x < 0 ergibt sich
eine räumlich veränderliche Wahrscheinlichkeitsamplitude in diesem Bereich.
wobei mit R bzw. T die Amplitude des reflektierten bzw. transmittierten Anteils bezeichnet wird. Innerhalb der Barriere gilt
−
~2 d2 ϕ
+ U0 ϕ = Eϕ
2m dx2
für die zeitunabhängige Schrödingergleichung. Da (U0 − E) > 0 ist, hat die obige
Gleichung die allgemeine Lösung
ϕ = C eαx + D e−αx
√
2m(U −E)
0
. Wir müssen also die Konstanten R, T, C, D bestimmen. Wegen
wobei α =
~
der Stetigkeit der Wellenfunktion muss
ϕ(L) = ψB (L)
und ϕ(0) = ψA (0)
gelten. Weiterhin muss auch die 1te Ableitung der Wellenfunktion bei ±L/2 stetig sein,
was auf
′
ϕ′ (L) = ψB
(L)
′
und ϕ′ (0) = ψA
(0)
4.5. Teilchen in eindimensionalen Potentialen
55
führt.
Wenn man das Gleichungssystem für L ≫ 1/α auswertet, ergibt sich
T ≈−
4ikα e−(α+ik)L
(α − ik)2
so dass wir in diesem Limes für die Tunnelwahrscheinlichkeit |T |2 = T T ⋆
T ⋆T ≈
16α2 k2 e−2αL
(α2 + k2 )2
erhalten. Die Tunnelwahrscheinlichkeit
√ nimmt also exponentiell mit der Breite der
Potentialbarriere und (wegen α ∼ U0 − E) der Wurzel aus der Differenz zwischen
Höhe der Barriere und Energie des Teilchens ab.
Beispiele für solche Tunnelereignisse sind das Tunneln von Elektronen durch isolierende
Schichten zwischen zwei Leitern oder das Tunneln von α-Teilchen durch die Potentialbarriere der repulsiven Coulomb-Wechselwirkung beim α-Zerfall schwerer Kerne.
4.5.3
“Eingesperrte Teilchen”
Abbildung 4.7: Der unendlich tiefe Potentialtopf.
Das einfachste Beispiel eines eindimensionalen Potentials ist der unendlich hohe Potentialtopf (siehe Abb. 4.7), d.h.
∞ |x| ≥ L/2
U (x) =
0 |x| ≤ L/2
Für ein Teilchen mit endlicher Energie bedeutet dies, dass das Teilchen im Intervall
zwischen [0, L] eingesperrt ist.
Innerhalb des Potentialtopfes lautet die zeitunabhängige Schrödingergleichung:
−
~2 ′′
ϕ (x) = Eϕ
2m
56
Kapitel 4. Quantenmechanik
bzw.
ϕ′′ + α2 ϕ = 0 mit α2 =
2mE
~2
Die DGL hat die allgemeine Lösung:
ϕ(x) = A eiαx + B e−iαx
Zur vollständigen Bestimmung der Lösung müssen wir also die Konstanten A, B bestimmen. Dazu nutzen wir aus, dass die Stetigkeit der Wellenfunktion ϕ(−L/2) =
ϕ(L/2) = 0 (da wg. U (x) = ∞ ϕ(x) für |x| ≥ L2 verschwinden muss).
Wir erhalten also die Gleichungen:
L
L
0 = A eiα 2 + B e−iα 2 = (A + B) cos(αL/2) + i(A − B) sin(αL/2)
und
L
L
0 = A e−iα 2 + B eiα 2 = (A + B) cos(αL/2) − i(A − B) sin(αL/2)
Die Gleichungen sind erfüllt, falls
(i)
A=B
und
cos(αL/2) = 0
⇒ αL/2 = nπ/2 ; n = 1, 3, 5, . . .
oder
(ii)
A = −B
und
sin(αL/2) = 0
⇒ αL/2 = nπ/2 ; n = 2, 4, 6, . . .
Für den Fall (i) ergibt sich für die Wellenfunktion
ϕn = 2A cos (nπx/L)
mit
n = 1, 3, 5, . . .
und
En =
~2 2 ~2 n2 π 2
α =
2m
2mL2
Im Fall (ii) lautet die Wellenfunktion:
ϕn = 2A sin(nπx/L)
mit
n = 2, 4, 6, . . .
und En wie für (i).
Wir sehen also, dass die Energien diskrete Werte annehmen, die nur von den fundamentalen Konstanten n, π, der Länge des Intervalls L und der Masse des Teilchens
abhängen. Durch die Wahl des Energieeigenwertes wird auch die Wellenfunktion festgelegt.
Unser Ergebnis ist auch konsistent mit der Unschärferelation, wie folgende Überlegung
√
zeigt: Für die niedrigste Energie E1 gilt für den Betrag des Impulses p = 2mE =
h
~π
L = 2L . Da wir die Richtung des Teilchens nicht kennen, hat die Impulsunschärfe den
Wert ∆p = h/L, so dass ∆p∆x ≃ h, was konsistent mit der Unschärferelation ist.
57
4.6. Der quantenmechanische Oszillator
4.5.4
Quantenzahlen
Die ersten beiden Wellenfunktionen sind in der nebenstehenden Abbildung gezeigt.
Die erlaubten Energien En und die dazu gehörige Wellenfunktion ϕn werden durch die
Zahl n festgelegt, so hat z.B. die Wellenfunkion ϕn (n + 1) Knoten (einschließlich der
Knoten bei x = ±L/2). Die Zahl n hat für dieses Problem die Rolle einer Quantenzahl.
Quantenzahlen sind physikalischen Messgrößen oder Observablen zugeordnet, die einen
scharfen konstanten Wert besitzen, in unserem Fall die Energie des Teilchens En .
Bem.: Wir haben bislang die Wellenfunktion nur bis auf eine Konstante A bestimmt.
Die Konstante ergibt sich aus der Normierung der Wellenfunktion.
4.6
Der quantenmechanische Oszillator
Wir betrachten nach diesen einführenden Beispielen mit dem Oszillatorpotential ein
Potential, das eine realistischere Form hat. Das Bindungspotential in zweiatomigen
Molekülen hat beispielsweise die typische Form
wobei xs den Abstand zwischen den Kernen bezeichnet. Ähnlich wie beim klassischen
System ist es sinnvoll, das Potential in der Nähe des Minimums durch ein Oszillatorpotential zu nähern, d.h.
1
V (xs ) ≃ k(x − x0 )2
2
Damit lautet dann die zeitunabhängige Schrödingergleichung
−
1
~ ′′
ϕ (x) + kx2 ϕ = Eϕ
2m
2
Die Lösung der obigen Gleichung erfordert die Einführung einiger Begriffe und wird
im Anhang erläutert. An dieser Stelle wollen wir nur die wichtigsten Ergebnisse zusammenfassen.
Genau wie im Fall des Potentialtopfes werden die verschiedenen Lösungen durch die
Quantenzahl n festgelegt, wobei n = 0, 1, 2, . . .. Die Energie wächst mit n genauso wie
die Komplexität der zugehörigen Wellenfunktion.
Der Grundzustand des Systems (d.h. die Wellenfunktion zu n = 0) ist gegeben durch
r
mω
k
−a2 x2 /2
2
ϕ0 = A0 e
mit a =
,ω=
~
m
Die zugehörige Grundzustandsenergie ist E0 =
gegeben durch
~ω
2 .
Der erste angeregte Zustand ist
2 x2 /2
ϕ1 = A1 x e−a
wobei A0 , A1 die Normierungskonstanten bezeichnen. Einsetzen von ϕ1 in die stationäre Schrödingergleichung führt auf E1 = 32 ~ω. Die einfache Beziehung zwischen n
und En gilt auch für n > 1, d.h. En = (n + 21 )~ω.
58
Kapitel 4. Quantenmechanik
Der Vergleich zwischen Vibrationsenergien für reale Moleküle und dem Spektrum der
Energieeigenwerte zeigt eine gute Übereinstimmung, wobei auch messbare Abweichungen von der konstanten Energiedifferenz zwischen benachbarten Energieniveaus existieren.
4.6.1
Das Korrespondenzprinzip
Wie unterscheiden sich nun die klassische und die quantenmechanische Lösung des
Oszillators?
Die Bewegung eines klassischen Teilchens im Oszillatorpotenzial wird durch x = x0 cos(ωt)
beschrieben. Die Wahrscheinlichkeitsverteilung p(x)dx wird durch die Zeit bestimmt,
die das Teilchen zwischen x und x + dx verbringt. Diese Kurve hat den folgenden
Verlauf:
An den Umkehrpunkten verlangsamt sich die Bewegung des Teilchens, so dass p(x)
bei ±x0 divergiert. Diese Form unterscheidet sich signifikant von der Aufenthaltswahrscheinlichkeit im quantenmechanischen Grundzustand des Teilchens. Andererseits wissen wir aber, dass die klassische Mechanik für makroskopische Teilchen eine zutreffende
Beschreibung liefert. Daher muss die Quantenmechanik im klassischen Limes dieselben
Vorhersagen wie die klassische Mechanik treffen. Dies ist das sog. Korrespondenzprinzip.
Der Übergang vom quantenmechanischen zum klassischen Oszillator findet bei hoher
Energie statt, da dann der Abstand zwischen zwei Energieniveaus ~ω klein wird im
Vergleich zur Energie des Oszillators E = (n + 21 )~ω. Für große Werte von n oszillieren
die Eigenfunktionen von n sehr schnell und nähern sich tatsächlich der Verteilung des
klassischen Oszillators an.
4.7
4.7.1
Quantensysteme
Das Wasserstoffatom
Das Wasserstoffatom ist das einfachste aller Atome, bestehend aus einem Proton
und einem Elektron. Die physikalischen Eigenschaften des H-Atoms werden durch die
Coulomb-Wechselwirkung zwischen den gegensätzlich geladenen Teilen des Atoms bestimmt. Die Coulombkräfte zwischen Elektron und Proton verschwinden wie die Gravitationskräfte mit dem Abstandsquadrat, d.h. wie 1/r 2 . Die Form des Potentials legt
also nahe, dass wir die Ergebnisse, die wir bei der Diskussion des Gravitationspotentials
kennen gelernt haben, auf das Wasserstoffatom übertragen können.
Dies würde insbesondere für die gebundenen Zustände bedeuten, dass sich das Elektron
auf periodischen Bahnen um den Atomkern bewegt, wobei die Energie des Elektrons
aus einem kontinuierlichen Intervall gewählt werden kann. Wir haben aber schon bei
der Diskussion der gebundenen Zustände in eindimensionalen Potentialen gesehen, dass
wir diese Analogie für mikroskopische Teilchen nicht direkt nutzen können, da:
1. Wegen der Unschärferelation kann man den Ort und den Impuls des Elektron
nicht gleichzeitig exakt bestimmen ⇒ Man kann keine “Bahn” für die Bewegung
des Elektrons angeben
59
4.7. Quantensysteme
2. Die Energie eines Elektrons, das im Potential des Kerns gebunden ist, kann nur
diskrete Werte annehmen.
4.7.2
Atomspektrum
Wir haben bei der Diskussion des Photoeffekts gesehen, dass die Energie eines Photons
den Wert E = hν hat. Dies bedeutet, dass sich die Gesamtenergie eines Systems um
hν verringert, wenn ein Elektron ausgesendet wird.
Das Spektrum von Glühbirnen ist kontinuierlich, d.h. wir können davon ausgehen, dass
die kontinuierlich verteilten Energien bei einer Glühlampe auftreten.
Anders verhält es sich bei Licht, das von einer sog. Gasentladungslampe ausgesendet
wird: Eine Gasentladungslampe hat folgenden schematischen Aufbau:
In einer Röhre befindet sich ein Gas einer bestimmten Atomsorte. Es werden zwei
Elektroden in der Röhre angebracht, so dass ein Strom zwischen den Elektroden fließen
kann. Wenn man Wasserstoffgas in eine Röhre bringt, liegt der Wasserstoff als H2 Molekül vor. Durch die Elektronen, die im Feld der beiden Elektroden beschleunigt
werden, wird ein Teil der Moleküle dissoziiert. Die Elektronen der einzelnen H-Atome
befinden sich dann typischerweise in einem angeregten Zustand, so dass beim Übergang
in den Grundzustand Licht emittiert wird.
Wenn man das Spektrum der Gasentladungslampe analysiert, stellt man fest, dass das
emittierte Licht den Frequenzbereich nicht kontinuierlich abdeckt, sondern nur Licht
zu bestimmten Frequenzen vorliegt.
Sichtbares Licht des H-Atoms
Die ausgesendeten Photonen stammen von Übergängen zwischen verschiedenen Energieniveaus des H-Atoms, so dass wir durch die Analyse des Spektrums, den experimentellen Nachweis für die diskreten Energieniveaus der gebundenen Elektronen erbracht
haben.
Um die Eigenschaften des H-Atoms genauer zu charakterisieren, müssen wir die Schrödingergleichung
lösen, wobei wir uns wiederum auf die stationäre SG beschränken können. Zudem
können wir wie beim klassischen System zu Schwerpunktskoordinaten übergehen.
Das Coulombpotential hängt, (wie das Gravitationspotential) nur vom Abstand r ab.
Wir müssen aber trotzdem die dreidimensionale stationäre SG lösen. Die Form des
Potentials legt nahe Kugelkoordinaten einzuführen. Die Wellenfunktionen hängen dann
von den Variablen (r, θ, ϕ) ab. Es existiert aber auch eine Klasse von Lösungen, die
nur von der Variablen r abhängt. Für diese Lösungen ϕ(r) ist analog zu den bisher
diskutierten Fällen die Wahrscheinlichkeit, Elektronen im infinitesimalen Volumen dV
bei r zu finden, gegeben durch
ϕ⋆ (r) ϕ(r) dV
Die Normierungsbedingung lautet entsprechend:
Z∞ Z2π Zπ
0
0
0
2
⋆
dr dϕ dθ r sin θ ϕ (r)ϕ(r) = 4π
Z∞
0
dr [rϕ⋆ (r)][rϕ(r)] = 1
60
Kapitel 4. Quantenmechanik
Abbildung 4.8: Potentialverlauf des Wasserstoffatoms. Das Potential wurde symmetrisch um r = 0 gezeichnet, um an die dreidimensionale Struktur des Potentials zu
erinnern.
Die Normierungsbedingung unterscheidet sich also nur durch den Faktor 4π und der Ersetzung ϕ(r) → rϕ(r) von der Normierung eindimensionaler Wellenfunktionen. Wenn
wir die Ersetzung n(r) = rϕ(r) machen, ergibt sich die 1d Gleichung:
−
~2 d2 n
+ V (r)n = En
2m dr 2
V (r) bezeichnet die potentielle Energie für Teilchen im Abstand r. Wie bereits erwähnt
wechselwirken Elektron und Proton durch das Coulombpotential, das die Form
V (r) = −
e2
4πǫ0 r
hat, also bis auf einen Vorfaktor mit dem Gravitationspotential übereinstimmt.
Bem.: Die obige SG gilt strenggenommen nur, wenn r hinreichend groß ist, da der
Atomkern eine endliche Ausdehnung hat. Diese ist jedoch im Vergleich zum typischen
Abstand des Elektrons zu vernachlässigen.
Wir erhalten also insgesamt:
−
e2
~2 d2 n
n = En
−
2m dr 2
4πǫ0 r
(4.2)
V (r) für das H-Atom
Wir interessieren uns für gebundene Zustände, also Zustände mit E = −EB < 0, wobei
EB die Bindungsenergie des Elektrons bezeichnet.
Zur Lösung der SG betrachten wir zunächst den Wert von n(r) bei 0 und ∞. Da ϕ(r)
am Ursprung endlich sein sollte, gilt n(0) = 0ϕ̇(0) = 0. Damit ϕ(r) normierbar ist,
sollte limr→∞ n(r) = 0 gelten. Wir suchen also Lösungen, die bei 0 und ∞ verschwinden.
Wenn wir die stationäre SG für r → ∞ auswerten, verschwindet das Potential, so dass
n(r) für r → ∞ näherungsweise der Gleichung:
−
~2 ′′
n = −EB n
2m
61
4.7. Quantensysteme
bzw.
n′′ − a2 n = 0 mit
a2 =
2mEB
~2
Die allgemeine Lösung dieser Gleichung lautet
n(r) = A e+ar + B e−ar
Aus der Normierbarkeitsbedingung folgt sofort A = 0. Wir suchen also eine Funktion,
die die asymptotische Form n(r) = Be−ar besitzt und bei r = 0 verschwindet. Die
einfachste Funktion, die diese Bedingung erfüllt, ist
1/2 3/2
1
1
r e−r/a0
n1 (r) =
π
a0
{z
}
|
const
Diese Funktion ist Lösung der Gleichung (4.2), wenn
a0 =
4πǫ0 ~2
me2
;
E=−
e2
8πǫ0 a0
Der Abstand a0 hat den Wert 0.53 · 10−11 m. a0 wird Bohr Radius genannt. Damit
lautet die normierte Wellenfunktion insgesamt
ϕ1 (r) =
n1 (r)
=
r
1/2 3/2
1
1
e−r/a0
π
a0
Abbildung 4.9: Wahrscheinlichkeitsdichten im Grundzustand des Wasserstoffatoms.
Links: Darstellung der Abhängigkeit der Wahrscheinlichkeitsdichte vom Kernabstand.
Rechts: Radiale Wahrscheinlichkeitsdichte.
Die Abb. 4.9 zeigen ϕ(r) und rϕ(r) = n(r). n(r) nimmt bei a0 ein Maximum an,
während ϕ(r) für r = 0 maximal ist. Ausschlaggebend für die Wahrscheinlichkeit,
62
Kapitel 4. Quantenmechanik
ein Elektron im Abstand r zu finden, ist aber n(r), da die Wahrscheinlichkeitsdichte
∼ r 2 ϕ2 (r) = n2 (r) ist. Durch n1 (r) wird der Grundzustand des H-Atoms beschrieben.
Die zugehörige Energie ist −13.6eV bzw. −2.18 · 10−18 J.
Neben dem Grundzustand gibt es auch angeregt radialsymmetrische Zustände, deren Wahrscheinlichkeitsamplitude mehrere Maxima aufweisen. Das Eigenwertspektrum
lautet:
e2
1
1
= 2 E1
En = − 2
n
8πǫ0 a0
n
Die verschiedenen Eigenwerte werden also durch die Hauptquantenzahl n festgelegt.
Wir haben aber bisher die Winkelabhängigkeit der Wellenfunktion außer Acht gelassen.
Wenn man diese berücksichtigt, kann man weitere Zustände unterscheiden, die durch
die Wellenzahlen l, m festgelegt werden.
Man kann zeigen, dass für die Quantenzahlen gilt:
1. n = 1, 2, 3, . . .
2. l = 0, 1, . . . , n − 1
3. m = −l, −l + 1, . . . , l − 1, l
d.h. für n = 1 haben wir genau einen Zustand mit n = 1, l = 0 und m = 0, den oben
diskutierten Grundzustand des H-Atoms. Für den ersten angeregten Zustand haben
wir aber bereits 4 Zustände mit den Quantenzahlen:
n
2
2
2
2
l
0
1
1
1
m
0
-1
0
1
Aufgrund der Symmetrie des Wasserstoffatoms hängt die Energie der Zustände nur von
der Hauptquantenzahl ab. Bei den Zuständen tritt für l 6= 0 eine Winkelabhängigkeit
auf, wie in Abb. 4.10 gezeigt. Diese Winkelabhängigkeit führt auf ein Problem: Die
Zustände besitzen mit der z-Achse eine ausgezeichnete Symmetrieachse, das Potenzial
des H-Atoms dagegen nicht.
Dieser scheinbare Widerspruch wird dadurch gelöst, dass man alle Zustände zu einem festen l überlagert. Dann ergibt sich wieder eine kugelsymmetrische Aufenthaltswahrscheinlichkeit, entsprechend der Symmetrie des Problems. Wir können uns also
vorstellen, dass das Elektron mit der Energie En alle n2 Zustände mit gleicher Wahrscheinlichkeit besetzt.
Die mathematische Beschreibung des H-Atoms wird im Anhang kurz skizziert.
Nach dem Korrespondenzprinzip würden wir erwarten, dass die Zustände zu großen
Quantenzahlen, den klassischen Bahnen von Teilchen im Zentralpotential entsprechen.
Dies ist tatsächlich der Fall, wie die ringförmige Wahrscheinlichkeitsdichte P (r) für
den Zustand mit n = 45 und l = 44 zeigt.
63
4.7. Quantensysteme
4.7.3
Eigenschaften von Atomen
Der Atomaufbau folgt einer Systematik
Wenn man die Ionisierungsenergie von Atomen betrachtet, sieht man, dass sich eine
gewisse Struktur ergibt. Man kann die Atome in Gruppen einteilen. Das erste Element
dieser Gruppe ist leicht ionisierbar, während zur Ionisierung des letzten Elementes eine
große Energie benötigt wird. Die ersten Elemente einer Gruppe sind die reaktionsfreudigen Alkalimetalle und die letzten die Edelgase. Die Anzahl der Elemente in einer
Gruppe bzw. Periode sind 2, 8, 8, 18, 18 und 32. Diese Zahlen lassen sich mit Hilfe der
Quantenmechanik leicht erklären.
Atome emittieren und absorbieren Licht
Genauso wie beim H-Atom gibt es auch bei den übrigen Atomen diskrete Energieniveaus. Übergänge zwischen diesen Niveaus können durch die Absorption und Emission
von Licht mit der Frequenz
ν=
Eh − Et
h
Eh > Et
induziert werden. Die Energieniveaus, die diese Frequenzen bestimmen, lassen sich mit
Hilfe der Quantenmechanik berechnen.
Atome haben magnetische Eigenschaften
Bei der Behandlung des Wasserstoffatoms haben wir gesehen, dass der Zustand des
Elektrons durch die Quantenzahlen n, l, m festgelegt ist. Die Quantenzahlen l, m beziehen sich auf den Betrag und die z-Komponente des Drehimpulses des Elektrons.
Wir wollen kurz diskutieren, welche Konsequenzen klassisch der Drehimpuls eines geladenen Teilchens hat. Aus der Elektrodynamik wissen wir, dass bewegte elektrische
(Biot-Savart Gesetz), wobei I die
Ladungen Magnetfelder induzieren dB = µ4π0 I dl×r
r3
Stromstärke, dl einen infinitesimalen Abschnitt in Stromrichtung und r den Abstandsvektor von der bewegten Ladung bezeichnet. Man kann sich auch davon überzeugen,
dass durch einen Kreisstrom ein magnetisches Dipolfeld, das entgegen gesetzt zum
Drehimpuls orientiert ist.
Obwohl wir bei quantenmechanischen Zuständen nicht von der Bewegung der Elektronen entlang klassischer Bahnen ausgehen können, zeigt sich, dass auch mit dem
quantenmechanischen Drehimpuls ein magnetisches Dipolmoment verbunden ist.
Die Verkopplung von Drehimpuls und magnetischem Moment lässt sich durch das
Einstein-de Haas-Experiment nachweisen. Bei diesem Experiment wird ein Eisenzylinder in eine Spule gebracht. Wird der Spulenstrom eingeschaltet, richten sich die
magnetischen Momente der Elektronen entlang des Magnetfeldes aus. Da aber die
magnetischen Momente mit den Drehimpulsen der Atome gekoppelt sind, entsteht
ein resultierendes Drehmoment der Atome, das aufgrund der Erhaltung des Gesamtdrehimpulses durch eine gegensinnige Rotation des Zylinders erfolgen muss. Dieser
Versuch ist ein Beispiel dafür, wie ein quantenmechanischer Effekt zu makroskopisch
beobachtbaren Phänomenen führt.
64
Kapitel 4. Quantenmechanik
4.7.4
Der Spin des Elektrons
Unabhängig davon, ob ein Elektron sich frei bewegt oder in einem Potential gebunden
ist, hat es einen sogennanten Spindrehimpuls S oder kurz Spin. Der Spin ist wie die
Masse oder Ladung eine charakteristische Eigenschaft des Elektrons. Im Gegensatz
zu anderen Größen gibt es zum Spin keine klassische Referenzgröße, er ist also rein
quantenmechanischer Natur.
Der Betrag des Spins S ist quantisiert und wird durch die Spinquantenzahl s festgelegt.
Für Elektronen gilt genauso wie für Protonen und Neutronen immmer s = 21 . Mit dem
Spin ist eine weitere Quantenzahl ms verbunden, die die Komponente von S entlang
einer beliebigen Achse festlegt.
Damit ist nun die Liste der Quantenzahlen des Elektrons im Wasserstoffatom vollständig:
n
Hauptquantenzahl
l, ml
ms
n = 1, 2, 3, . . .
Bahndrehimpuls l = 0, 1, . . . , n − 1 ; m = −l, −l + 1, . . . , l − 1, l
Spin
± 12
Alle Zustände mit gleichem n bilden eine Schale. Es gibt insgesamt 2n2 Zustände in
einer Schale. Alle Zustände mit gleichem n und l bilden eine Unterschale. In einer
Unterschale kann man 2(2l + 1) Zustände unterscheiden.
4.7.5
Der Drehimpuls und magnetische Dipolmomente
Der Bahndrehimpuls
Der Betrag des Bahndrehimpulses L eines Elektrons ist quantisiert, d.h. er kann nur
diskrete Werte annehmen. Diese Werte sind:
p
L = l(l + 1)~
wobei l die Bahndrehimpulsquantenzahl ist. Für eine gegebene Hauptquantenzahl n
kann l die Werte l = 0, 1, 2, . . . , n − 1 annehmen. Mit dem Bahndrehimpuls ist ein
magnetisches Dipolmoment µorb verbunden, das gegeben ist durch
µorb = −
e
L
2m
Dadurch, dass der Bahndrehimpuls quantisiert ist, muss auch der Wert des magnetischen Moments quantisiert sein. Man kann weder alle Komponenten von µ (und damit
genauso wenig alle Komponenten von L) gleichzeitig messen, wie man den Ort und
Impuls eines Teilchens gleichzeitig bestimmen kann. Es ist aber möglich, eine Komponente des Drehimpulses zu bestimmen. Die z-Komponente des Dipolmomentes ist
quantisiert und gegeben durch
µorb,z = −ml µB
65
4.7. Quantensysteme
e~
= 0, 274 × 10−24 J/T Bohrsches Magneton genannt wird. Für die
wobei µB = 2m
z-Komponente von L gilt:
Lz = m l ~
Man kann sich den Wert von Lz durch das obige Vektorbild (siehe Abb. 4.11) veranschaulichen. Bei Visualisierung wie dieser muss man sich aber vergegenwärtigen, dass
nicht alle Komponenten von L gleichzeitig bestimmt werden können.
Das magnetische Moment des Spins
Für den Spin gilt:
S=
p
s(s + 1)~ =
~√
3
2
da für den Spin immer s = 21 gilt. Genauso wie für den Bahndrehimpuls ist mit dem
Spin ein magnetisches Moment verbunden:
µ=−
e
S,
m
dessen Komponente in z-Richtung gemessen werden kann. Die z-Komponente des Drehimpulses in z-Richtung lautet
µs,z = −2ms µB
wobei ms = ± 21 .
Bem.: Der Faktor kann erst durch die relativistische Dirac-Theorie verstanden werden.
Der Gesamtdrehimpuls
Bei Atomen mit z Elektronen lautet der Gesamtdrehimpuls
J = (L1 + L2 + . . . + Lz ) + (S1 + S2 + . . . + Sz )
Das magnetische Moment, das mit dem Gesamtdrehimpuls verbunden ist, zeigt wegen
des Faktors 2 beim magnetischen Moment des Spins nicht in Richtung von −J, sondern
bildet einen Winkel zu diesem Vektor.
Das Stern-Gerlach Experiment
Der Nachweis der Quantisierung des Drehimpulses wurde durch das Stern-Gerlach
Experiment erbracht (siehe Abb. 4.12).
Bei diesem Versuch wird Silber in einem Ofen verdampft. Einige Silberatome können
durch einen Schlitz aus dem Ofen austreten. Sie werden durch einen evakuierten Kanal geleitet und passieren dann einen weiteren Schlitz, so dass ein fokussierter Strahl
von Silberatomen entsteht. Dieser Strahl wird durch das Magnetfeld eines Elektromagneten geleitet und trifft auf einen Schirm. Durch das Magnetfeld kann der Strahl der
66
Kapitel 4. Quantenmechanik
Silberatome abgelenkt werden. Da die Atome elektrisch neutral sind, erfolgt die Ablenkung nicht durch die Lorentzkraft (F = qv × B), sondern Kopplung des magnetischen
Dipolmomentes an das Feld. Die Potentielle Energie eines Dipols im Feld B lautet:
U = −µB
Wenn wir ein Magnetfeld anlegen, dessen einzige nicht verschwindende Komponente
in z-Richtung zeigt, gilt:
U = −µz B
Wir wollen nun untersuchen, welche Kraft auf das Atom wirkt:
Es gilt:
Fz = −
dU
dB
= µz
,
dz
dz
d.h. der Gradient des Magnetfeldes bestimmt die Ablenkung der Silberatome. Klassisch würde man eine kontinuierliche Intensitätsverteilung der Silberatome zwischen
maximaler Ablenkung in ±z-Richtung erwarten, da alle Orientierungen in z-Richtung
möglich sind. Stattdessen beobachtet man die Aufspaltung des Strahls in zwei Anteile
(siehe Abb. 4.13). Dieses Ergebnis kann man durch die Quantenmechanik leicht verstehen: In der Elektonenhülle des Silberatoms heben sich die magnetischen Momente der
Elektronen alle bis auf das Spinmoment eines Elektrons gegenseitig auf. Damit gibt es
für die ablenkende Kraft nur zwei Einstellungen:
dB
Fz = ±µB
dz
was zur Aufspaltung des Strahles führt.
4.8
Kernspinresonanz
Nicht nur Elektronen haben ein Spin, sondern auch Protonen. Damit besitzen sie auch
ein magnetisches Moment. In einem konstanten Magnetfeld B = Bez gibt es nur
zwei mögliche Einstellungen des Spins, d.h. es gibt parallel und antiparallel zum Feld
orientierte Spins.
Diese beiden Zustände unterscheiden sich energetisch, d.h. Protonen, die antiparallel
zum Feld ausgerichtet sind, besetzen ein um 2µz B höher liegendes Energieniveau. (siehe
Abb. 4.14)
Wenn man nun zusätzlich zum statischen Magnetfeld ein Wechselfeld mit der Frequenz
f anlegt, kann man Protonen, die sich im energetisch günstigeren Spinzustand befinden, anregen, d.h. man ändert die Orientierung des Spins. Man spricht dabei auch vom
Umklappen des Spins. Die “passende” Frequenz für diesen Prozess ist
hf = 2µz B,
67
4.8. Kernspinresonanz
d.h. bei dieser Frequenz tritt die sog. Kernspinresonanz auf. Messbar wird dieser Resonanzeffekt dadurch, dass dem elektromagnetischen Wechselfeld Energie fr das Umklappen der Kernspins entzogen wird, da sich ohne die Anregung eine größere Zahl
von Kernen im energetisch günstigeren Zustand befinden.
Für Protonen (d.h. Wasserstoffkerne) wird die Resonanzbedingung nicht nur durch
das äußere Feld bestimmt, sondern auch durch ein charakteristisches lokales Feld, das
durch die magnetischen Momente der benachbarten Atome und Kerne hervorgerufen
wird.
Damit lautet die Resonanzbedingung
hf = 2µz (Bext + Blokal .
Die Korrektur durch das lokale Feld ist der Grund dafür, dass man die Kernspinresonanz zur Spektroskopie verwenden kann. Dies zeigt die Resonanzkurve für Ethanol
CH3 − CH2 − OH, (siehe Abb. 4.15) die sich aus der Variation der Stärke des äußeren
Magnetfeldes bei fester Frequenz des äußeren Wechselfeldes ergibt. Dieses Beispiel
zeigt, dass sich die Kernspinresonanz zur Analyse chemischer Verbindungen eignet.
Ein weiteres wichtiges Anwendungsfeld ist die Kernspintomographie, bei der das äußere
Feld nicht räumlich konstant ist. Dadurch variiert auch die Resonanzbedingung räumlich,
so dass man eine Zuordnung von Resonanzsignal zum Entstehungsort vornehmen kann.
Es ist somit beispielsweise möglich, die lokale Dichte von Wasser zu bestimmen, die für
unterschiedliche Gewebearten charakteristische Werte aufweist. Die Auflösung dieser
Methode hängt davon ab, wie gut man die Resonanzbedingung lokalisieren kann. Daher werden bei dieser Methode sehr starke Magnetfelder eingesetzt, so dass auch bei
sehr geringen räumlichen Abständen ein gutes Signal-/Rauschverhältnis vorliegt.
4.8.1
Das Pauli-Prinzip
Bislang haben wir nur jeweils ein Teilchen in einem Potential und die zugehörigen
Quantenzustände untersucht. Wenn wir nun aber Potentiale betrachten, in denen sich
mehrere Teilchen mit halbzahligem Spin befinden, müssen wir das sogenannte PauliPrinzip berücksichtigen:
Zwei Teilchen mit halbzahligem Spin (z.B. Elektronen) können niemals den gleichen
Zustand besetzen.
Bem.: Mit dem allgemeinen Formalismus der Quantenmechanik kann man zeigen, dass
das Pauli-Prinzip direkt aus dem Prinzip der Ununterscheidbarkeit identischer Teilchen
folgt.
Wir wollen nun die Konsequenz des Pauli-Prinzips für den eindimensionalen Potentialtopf diskutieren. Die Zustände sind durch die Quantenzahlen n (Energie) und die
Quantenzahl ms = ± 12 für Spin- 21 -Teilchen charakterisiert.
Damit können wir jedes Energieniveau (wir setzen voraus, dass es keine Wechselwirkungen zwischen den Teilchen gibt) zweifach besetzen, jeweils mit einem Teilchen mit
68
Kapitel 4. Quantenmechanik
ms = 12 und ms = − 12 . Die Konsequenzen des Pauli-Prinzips kann man für ein System
mit 3 Teilchen in einem eindimensionalen unendlich hohen Potentialtopf verdeutlichen.
Die Energieniveaus für dieses System sind gegeben durch
2 h
En =
n2
8mL2
Wir können also das niedrigste Energieniveau E1 mit zwei Teilchen besetzen, die sich
durch die Spinquantenzahl ms = ± 12 unterscheiden. Das dritte Teilchen kann aber das
niedrigste Niveau nicht mehr besetzen, da es sonst im Widerspruch zum Pauli-Prinzip
zwei Teilchen gäbe, die in allen Quantenzahlen übereinstimmen würden. Somit besetzt
das dritte Teilchen das Energieniveau zu n = 2 und es gilt für die Gesamtenergie des
Systems
2 3 h2
h
(2
·
1
+
4)
=
Eges = 2E1 + E2 =
8mL2
4 mL2
Sie ist also doppelt so hoch wie die Gesamtenergie ohne Pauli-Verbot.
4.8.2
Der Aufbau des Periodensystems
Die Zustände des Elektrons im Wasserstoffatom lassen sich durch 4 Quantenzahlen
charakterisieren, und zwar n, l, ml , ms . Dies ist auch für komplexere Atome der Fall,
allerdings sind die Zustände und Energieniveaus von denen des H-Atoms verschieden,
da man neben der Coulombwechselwirkung mit dem Kern auch die Wechselwirkung
der Elektronen untereinander berücksichtigen muss. Dieses Problem lässt sich nur noch
durch numerische Methoden exakt behandeln.
Wie lässt sich nun aber die Struktur des Periodensystems erklären? Zunächst stellen
wir fest, dass alle Zustände mit denselben Werten für n, l zu derselben Unterschale
gehören. Es gibt daher 2(2l + 1) mögliche Zustände in einer Unterschale.
Es zeigt sich ferner, dass alle Zustände in einer Unterschale dieselben Energien haben, wobei der Wert der Energie hauptsächlich von n abhängt. Man verwendet zur
Bezeichnung der Unterschalen die Buchstaben
l = 0, 1, 2, 3, 4, 5
s, p, d, f, g, h
(z.B. n = 3, l = 2 ⇒ 3d-Unterschale)
Bei der Besetzung der Unterschale spielt das Pauli-Prinzip eine wichtige Rolle. Ohne
das Pauli-Verbot würden alle Elektronen den 1s -Zustand besetzen. Dies ist aber nur
für zwei Elektronen möglich.
Die Besetzung der Schalen wollen wir für zwei Elemente erläutern.
1. Neon (10 Elektronen)
→ 2 Elektronen besetzen die 1s Unterschale
→ 2 Elektronen besetzen die 2s Unterschale
(n = 1, l = 0 = ml , ms = ± 12 )
(n = 2, l = 0 = ml , ms = ± 12 )
69
4.8. Kernspinresonanz
→ 6 Elektronen besetzen die 2p Unterschale
(n = 2, l = 1, ml = −1, 0, 1, ms = ± 12 )
Damit sind alle Unterschalen vollständig besetzt. Solche Atome (Edelgase) sind sehr
reaktionsträge.
2. Eisen (26 Elektronen)
Konfiguration
1s2 2s2 2p6 3s2 3p6 3d6 4s2
Beim Eisenatom ist bemerkenswert, dass die Elektronen nicht die 3d Schale vollständig
füllen, sondern zunächst die 4s Schale, da dies energetisch günstiger ist. Diese Tatsache
ist verantwortlich dafür, dass das Per
4.8.3
Bestimmung der Elemente durch Röntgenstrahlung
Wenn man einen Festkörper einem Elektronenstrahl aussetzt, emittiert dieser Röntgenstrahlung.
In der obigen Abb. 4.17 ist das charakteristische Röntgenspektrum eines Festkörpers
schematisch dargestellt. Wir können dabei einen kontinuierlichen Hintergrund und zwei
charakteristische Peaks unterscheiden. Der kontinuierliche Teil des Spektrums
entsteht durch die Streuung der Elektronen an den Atomen des Festkörpers. Dabei
werden die Elektronen abgebremst, so dass ein Teil der kinetischen Energie der Elektronen durch Emission von Röntgenstrahlung wieder frei wird. Die Grenzwellenlänge
ergibt sich gerade für den Prozess, bei dem das Elektron direkt seine gesamte kinetische
Energie abgibt, also
Ekin = hf =
hc
.
λmin
Das charakteristische Röntgenspektrum entsteht durch folgenden Mechanismus:
1. Das energiereiche Elektron schlägt ein Elektron aus einer tief liegenden Unterschale.
2. Das verbleibende Loch wird durch ein Elektron aus einer höheren Schale besetzt.
Bei der Besetzung des Lochs wird ein Photon mit der charakteristischen Wellenlänge
abgestrahlt. Diesen Effekt kann man zur Bestimmung der Elemente heranziehen (Moseley 1913). Wenn man die Wurzel der Frequenz der ha Linie gegenüber der Ordnungszahl z aufträgt, erhält man eine Gerade. Die lässt sich einfach durch die Betrachtung
der Energieniveaus erklären. Für das H-Atom gilt
En = −
13.6eV
1
mc4
=−
·
n2
8ǫ20 h2 n2
n = 1, 2, . . .
Bertachten wir nun ein Elektron aus der k-Schale (n = 1, l = 0) eines Mehrelektrons,
so ergibt sich:
70
Kapitel 4. Quantenmechanik
1. Wird ein Elektron aus der K-Schale entfernt, verbleibt dort nur noch ein Elektron. Dieses Elektron schirmt die Kernladung teilweise ab, so dass die effektive
Kernladung (Z − 1)e beträgt.
2. Wir nehmen an, dass mit der Verallgemeinerung
En = −
(13.6 eV )(Z − 1)2
m(Z − 1)2 e2 e2 1
=
−
n2
n2
8ǫ20 h2
auch für Mehrelektronensysteme gültig ist. Damit gilt für die ha -Strahlung
hfa = ∆E = E2 − E1
= (10.2 eV )(Z − 1)2
so dass
gilt.
p
fα =
r
10.2 eV
(Z − 1)
h
Damit haben wir den experimentell gefundenen linearen Zusammenhang bestätigt.
4.9
Laser und Laserlicht
Neben dem Transistor zählt der Laser zu den wichtigsten Anwendungen der Quantenmechanik. Laser sind mittlerweile in CD-Spielern, Scanner-Kassen etc. verbaut. Er
zeichnet sich gegenüber dem weißen Licht einer Glühbirne durch folgende Eigenschaften aus:
1. Laserlicht ist monochromatisch, d.h. es kann eine relative Schärfe
erreichen (Vergl. Neonleuchte 106 ).
λ
∆λ
= 1015
2. Laserlicht ist hochgradig kohärent: Lange Wellenzüge können sich über mehrere hundert Kilometer erstrecken ⇒ man kann Interferenzmuster über sehr lange
Strecken herstellen.
3. Laserlicht ist hochgradig gerichtet: Die Verbreiterung tritt nur durch die
Beugung an der Austrittsöffnung auf.
4. Laserlicht kann sehr scharf fokussiert werden, so dass man extrem hohe
Intensitäten erreichen kann.
4.9.1
Die Funktionsweise eines Lasers
Die Grundlage für die Funktionsweise eines Lasers liegt in der stimulierten Emission
von Licht (Light Amplification by the Stimulated Emission of Radiation).
Entscheidend für die Wirkungsweise eines Lasers sind die folgenden Prozesse:
71
4.9. Laser und Laserlicht
1. Absorption
Trifft ein Photon mit der Energie hf auf ein Atom, so kann es (bei passender Frequenz)
das Atom in einen angeregten Zustand mittlerer Energie Ex versetzen
hf = Ex − E0 ,
wobei E0 die Grundzustandsenergie ist.
2. Spontane Emission
Wenn sich das Atom in seinem angeregten Zustand befindet, geht es spontan in den
Grundzustand über. Typische Lebensdauern solcher Zustände sind 10−8 s, es können
aber Lebensdauern von 10−3 s auftreten (metastabile Zustände).
3. Stimulierte Emission
Wenn ein Photon der Energie hf auf ein angeregtes Atom trifft, kann es den Übergang
zum Grundzustand stimulieren. Dann wird ein weiteres Photon der Energie hf frei.
Wenn man es also schafft, viele Atome in einen angeregten Zustand zu versetzen, kann
man durch die stimulierte Emission einen starken Lichtimpuls aussenden. Dazu kann
man sich zunächst fragen, wieviele Atome sich ohne externe Manipulation in dem angeregten Zustand befinden. Dies wird durch die sog. Boltzmann-Statistik beschrieben.
Es gilt:
Nx = N0 e−(Ex −E0 )/kB T
wobei Nx(0) die Zahl der Atome im angeregten Zustand (Grundzustand) beschreibt,
kB ist die Boltzmann-Konstante (kB = 1.38 × 10−23 J/K) und T bezeichnet die Temperatur.
Hier halten wir zwei Tatsachen fest:
1. Da Ex > E0 ist, folgt immer Nx < N0 .
2. N0 und Nx gleichen sich für hohe Temperaturen an.
Um aber Laserlicht zu produzieren, muss man es schaffen, eine Inversion der Besetzungszahlen zu erreichen, d.h. man muss Zustände generieren bei denen Nx > N0 ist.
Eine Anordnung die dies erlaubt, ist der He-Ne Laser, dessen prinzipielle Funktionsweise im folgenden Abschnitt vorgestellt wird.
4.9.2
Der He-Ne Laser
Bei He-Ne Laser befindet sich ein 20 : 80 He/Ne Gemisch in einer Gasentladungsröhre
(siehe Abb. 4.20). Durch einen elektrischen Strom werden die He-Atome in einen angeregten Zustand mit Energie E2 = 20.66 eV versetzt. Bei der Kollision eines He-Atoms
im angeregten Zustand mit einem Ne-Atom, kann das N e-Atom, in einen Zustand mit
Energie E2 = 20.66 eV übergehen. Beim Übergang E2 → E1 wird dann ein Photon
ausgesendet, aus dem später der Laserimpuls entsteht.
In diesem System kann dann die Besetzungsinversion relativ leicht erreicht werden, da
72
Kapitel 4. Quantenmechanik
1. der E1 -Zustand des N e-Atoms sehr schnell zerfällt, so dass anfangs nur Atome
im Grundzustand vorliegen.
2. Durch die Metastabilität des E3 -Zustandes des He-Atoms bleibt genug Zeit, um
den E2 -Zustand von N e zu stimulieren.
3. Der Zerfall von E1 − E0 bei N e schnell ist, so dass man die N e-Atome schnell
wieder anregen kann.
Wir haben nun eine Sequenz von Quantenübergängen, die es erlaubt, dass stimulierte
Emission von sichtbarem Licht auftritt. Dieses Licht wird dann in der Röhre gehalten, so dass die Stimulation des E2 → E1 Übergangs gewährleiset bleibt. Den von
dieser Anordnung generierten Laserstrahl bildet der Teil des Lichtes, der durch einen
teildurchlässigen Spiegel austritt.
4.9. Laser und Laserlicht
73
Abbildung 4.10: Wahrscheinlichkeitsdichten für die Zustände des Wasserstoffatoms zu
den Quantenzahlen n = 2, l = 1 und m = −1, 0, 1.
74
Kapitel 4. Quantenmechanik
Abbildung 4.11: Einstellungen der z-Komponente eines Bahndrehimpulses mit l = 2.
4.9. Laser und Laserlicht
75
Abbildung 4.12: Schematischer Aufbau des Stern-Gerlach Experiments: In einem Ofen
mit einer kleinen Austrittsöffnung wird Silber verdampft. Die austretenden Silberatome
werden zu einem Strahl fokussiert und durch ein Magnetfeld geleitet. Die durch das
Magnetfeld abgelenkten Atome werden auf einem Schirm aufgefangen.
Abbildung 4.13: Darstellung der z-Abhängigkeit der Intensitätsverteilung des Atomstrahls bei aus- (blau) und eingeschaltetem (orange) Magnetfeld.
76
Kapitel 4. Quantenmechanik
Abbildung 4.14: (a) Orientierungen des magnetischen Moments des Kernspins in einem
konstanten Magnetfeld. (b) Die Energiedifferenz zwischen dem angeregten Zustand
(antiparallel) und dem Grundzustand (parallel) beträgt 2µz B.
4.9. Laser und Laserlicht
77
Abbildung 4.15: Kernspinresonanzspektrum von Ethanol. Die Spektrallinien treten
für eine Wechselfeld mit fester Frequenz dann auf, wenn für eine gegebene Stärke des
äußeren Magnetfeldes B die Resonanzbedingung erfüllt ist. Die Feldstärken, bei denen
Resonanz auftritt, sind charakteristisch für die jeweilige Untergruppe, so dass man auf
diese Weise die Zusammensetzung komplizierter chemischer Verbindungen bestimmen
kann.
Abbildung 4.16: Kerspintomographie von Herzgefäßen.
78
Kapitel 4. Quantenmechanik
Abbildung 4.17: Typisches Röntgenspektrum eines Festkörpers.
Abbildung 4.18: Links: Übergänge zwischen verschiedenenen Energieniveaus und
charakteristische Röntgenstrahlung. Rechts: Quadratwurzel der Frequenz der Kα Strahlung in Abhängigkeit von der Elementnummer.
4.9. Laser und Laserlicht
79
Abbildung 4.19: Die für die Funktionsweise eines Lasers entscheidenden Quantenübergänge: (a) Anregung eines höherliegenden Energieniveaus durch Absorption
eines Photons mit der passenden Frequenz. (b) Spontane Emission eines Photons durch
einen Übergang auf ein niedrigeres Energieniveau. (c) Stimulierter Übergang auf ein
niedrigeres Energieniveau.
Abbildung 4.20: Links: Übergänge beim He-Ne Laser. Durch den in der Gasentladungsröhre fließenden Strom werden bei den He-Atomen Übergänge von Grundzustand
auf das metastabile E3 Niveau generiert. Durch Kollision der angeregten He-Atome mit
Ne-Atomen im Grundzustand werden die Ne-Atome in den E2 -Zustand gebracht. Beim
spontanen bzw. stimulierten Übergang auf das instabile E1 Niveau wird Licht der Wellenlänge λ =nm emittiert. Rechts: Schematischer Aufbau des He-Ne Lasers. Ein He-Ne
Gemisch befindet sich in einer Gasentladungsröhre. Nur ein Bruchteil des emittierten
Lichts verlässt die Röhre durch einen teildurchlässigen Spiegel, so dass die stimulierte
Emission des Laserlichts kontinuierlich aufrecht erhalten werden kann.
80
Kapitel 4. Quantenmechanik
Anhang A
Konservative Kräfte
A.1
Wegintegrale
Wir betrachten Integrale der Form
Z
a · dr
C
wobei a ein Vektorfeld, z.B. eine Kraft F, und d r ein infinitesimaler Richtungsvektor
ist. Mit C bezeichnen wir die Raumkurve, entlang der das Integral ausgewertet wird.
Wir können wie bei gewöhnlichen Integralen in einer Dimension auch das Wegintegral
als Grenzwert einer Summe definieren:
Z
C
a · d r = lim
N →∞
N
X
p=1
a(xp , yp , zp ) · ∆rp ,
wobei wir annehmen, dass |∆rp | → 0 für N → ∞. Die Kurve kann entweder offen
(Anfangs- und Endpunkt sind verschieden) oder geschlossen (gleicher Anfangs- und
Endpunkt) sein. Die Wegintegrale werden berechnet, indem man das Skalarprodukt
ausführt, d.h.
Z
Z
Z
Z
a · d r = ax dx + ay dy + az dz
C
C
C
C
und die entsprechenden eindimensionalen Integrale auswertet.
Wir wollen dies an einem Beispiel erläutern: Es sei
x+y
a=
y−x
das Vektorfeld und C die Kurve, die durch x = 2u2 +u+1 und y = 1+u2 parametrisiert
wird. Wir betrachten das Integral für den Anfangspunkt (1, 1) und den Endpunkt (4, 2).
Damit ist ax = x + y = 3u2 + u + 2 und ay = −(u2 + u) sowie dx = (4u + 1)du und
81
82
Kapitel A. Konservative Kräfte
dy = 2u du. Der Punkt (1, 1) ergibt sich für u = 0 und der Endpunkt für u = 1. Damit
gilt:
I=
Z
ax dx +
C
Z
ay dy =
Z1
=
Z1
0
C
0
2
(3u + u + 2)(4u + 1) du −
12u3 + 7u2 + 9u + 2du −
Z1
2u(u2 + u) du
0
Z1
2u3 + 2u2 du
0
1 4 2 3 1
7 3 9 2
1
4
= 3u + u + u + 2u |0 − u + u |0
3
2
2
3
2
5
= 5 + + 4 = 10
3
3
Bemerkungen:
(1) Wenn man Anfangs- und Endpunkt der Kurve vertauscht, hat der Wert des Integrals das umgekehrte Vorzeichen. Dies gilt insbesondere dann, wenn man eine geschlossene Kurve in umgekehrter Richung entlang läuft.
(2) Man kann die Integrale auch stückweise auswerten, d.h. wenn P ein Punkt auf der
Kurve C mit den Anfangspunkten A, B ist, gilt:
I=
Z
C
A.2
a · dr =
ZB
a · dr =
A
ZP
a · dr +
A
ZB
a · dr
P
Konservative Kräfte und Potenziale
Ein Kraftfeld ist in einem einfach zusammenhängenden Gebiet G1 genau dann konservativ, wenn eine der folgenden Bedingungen erfüllt ist:
RB
F · d r (wobei A und B innerhalb von G liegen) ist unabhängig vom
H
Weg A zu B. Daher gilt auch C F · d r = 0 für jede beliebige geschlossene Kurve in G.
(1) Das Integral
A
(2) Es existiert eine Funktion ϕ, so dass
∂x ϕ(r)
F = ∂y ϕ(r) =: ∇ϕ(r) ,
∂z ϕ(r)
∂
∂
∂
, ∂y = ∂y
, ∂z = ∂z
.
wobei ∂x = ∂x
(3) Die Rotation von F(r) verschwindet:
∇ × F(r) = 0 ,
1
d.h. jede geschlossene Kurve in G lässt sich auf einen Punkt zusammenziehen, ohne dass man
G verlässt, z.B. der Zwischenraum zwischen zwei konzentrischen Kugeloberflächen ist einfach zusammenhängend, das Innere eines Torus (“Fahrradschlauch ohne Ventil”) dagegen nicht.
A.2. Konservative Kräfte und Potenziale
83
wobei
∂y Fz (r) − ∂z Fy (r)
∇ × F = ∂z Fx (r) − ∂x Fz (r) .
∂x Fy (r) − ∂y Fx (r)
(4) F · d r ist ein exaktes Differenzial2 .
Das totale Differenzial einer Funktion f (x, y, z) ist df = ∂f
dx + ∂f
dy + ∂f
dz. Differenziale,
∂x
∂y
∂z
zu denen man die Stammfunktion f (x, y, z) angeben kann, nennt man exakt. Eine notwendige und
= ∂∂x ∂f
usw.
hinreichende Bedingung dafür ist, dass für alle möglichen Kombinationen gilt: ∂∂y ∂f
∂x
∂y
2



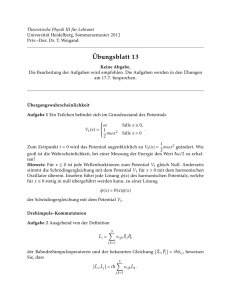




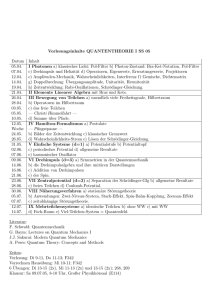
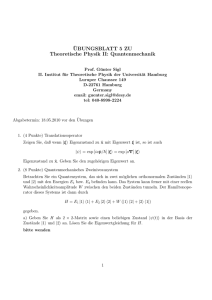
![Teil II: Quantenmechanik 1 Die Wellenfunktion [Griffiths 1.1]](http://s1.studylibde.com/store/data/002959439_1-7465ce5c82bb16d1bd7047f6c3c99749-300x300.png)