Formelsammlung
Werbung

FORMELSAMMLUNG
Für die Studienberechtigungsprüfungen
Mathematik 1 und Mathematik 2
1.1
Termumformungen, Binomischer Satz
Binomische Formeln:
• a2 + b2 reell nicht zerlegbar.
1. Bin. Formel: (a + b)2 = a2 + 2 · a · b + b2
• a3 + b3 = (a + b) · (a2 − a · b + b2 )
2. Bin. Formel: (a − b)2 = a2 − 2 · a · b + b2
• a3 − b3 = (a − b) · (a2 + a · b + b2 )
3. Bin. Formel: (a + b) · (a − b) = a2 − b2
• an − bn = (a − b) ·
n−1
P
k=0
an−1−k · bk
Binomischer Satz:
n
P
n
n n−2 2
n
n
n
n
n 0
n−1 1
0 n
a b +
a
b +
a
b + ... +
a b =
an−k · bk
(a + b) =
1
2
n
k
0
k=0
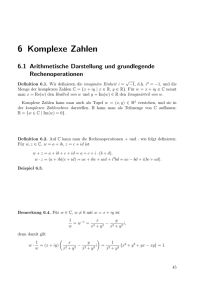
| {z }
| {z }
1
1
n
n!
• Binomialkoeffizienten:
= k! · (n−k)!
.
k
• Fakultät: n! = 1 · 2 · ... · n,
0! = 1! = 1.
• Für (a − b)n ist das Vorzeichen alternierend: (a − b)3 = + a3 − 3 a2 b + 3 a b2 − b3 .
Binomischer Satz und pascalsches Zahlendreieck:
1
1
1
1
+
4
+
3
+
Betrag: |x| =
1.2
+
6
x2
1 n=4
=
3
0
n=3
1
4
√
2
0
n=2
1
+
3
1
0
n=1
1
+
2
0
0
n=0
1
4
0
(a + b)0 = 1
1
1
2
1
3
1
4
1
(a + b)1 = 1a1 + 1b1
2
2
3
2
4
2
x falls x ≥ 0
−x falls x < 0
(a + b)2 = 1a2 + 2a1b1 + 1b2
3
3
4
3
(a + b)3 = 1a3 + 3a2b1 + 3a1b2 + 1b3
4
4
(a + b)4 = 1a4 + 4a3b1 + 6a2b2 + 4a1b3 + 1b4
,,macht x immer positiv”.
Bruchrechnen
Addition,
Subtraktion
a·y
a·y±x·b
a
x
x·b
b ± y = b·y ± y·b =
b·y
Multiplikation
a x
a·x
b · y = b·y
Division,
Doppelbrüche
a
a x
a y
b
b : y = x = b · x
y
◮ Hauptnenner: kgV(b, y),
b, y 6= 0 ◮ Brüche auf HN erweitern,
◮ Zähler addieren.
◮ ,,Zähler mal Zähler,
Nenner mal Nenner”.
b, y 6= 0
b, x, y 6= 0
◮ Division durch Bruch:
Multiplikation mit
dessen Kehrwert.
2.1
Potenzen
Definition: an = |a · a ·{.z. . · a}
heisst n-te Potenz von a, wobei
n Faktoren
1
Insbesondere: a = a und
k
an
k · a− n =
m
√
n
1
√
n
• Rationale Exponenten ⇒ Wurzeln: a n =
speziell: a n =
a 6= 0.
am
a ≥ 0,
a
Quadratwurzel:
n > 0.
√
1
a=a2
Potenzsätze
an · am = an + m
Gleiche Basis
Gleicher Exponent
n
Doppelte Potenzen
n
a · b = (a · b)
√
n
2.3
a ∈ R : Basis
n ∈ N : Exponent.
a0 = 1, falls a 6= 0
0n = 0, falls n > 0.
• Negative Exponenten ⇒ Nenner:
2.2
a·
√
n
b=
√
n
(a ) = a
a 6= 0
a n
an
=
bn
b
b 6= 0
r
√
n
a
a
√
= n
n
b
b
a·b
n·m
n m
n
an
= an − m
am
m n
= (a )
q
m
√
n
a=
√
nm
b 6= 0
a=
q
n
√
m
a
a≥0
Logarithmen
⇔
ay = x
a, x > 0, a 6= 1
Definition
loga (x) = y
Multiplikation,
Division
loga (x · y) = loga (x) + loga (y)
loga ( yx ) = loga (x) − loga (y)
Potenzen
loga (xy ) = y · loga (x)
ax = b
Basiswechsel
loga (x) = logb (a)
b
log (x)
x>0
a > 0; a 6= 1
b > 0; b =
6 1
speziell:
⇒
ln (b)
x = ln (a)
ln(x)
loga (x) = ln(a)
3
Planimetrie
3.1
Allgemeine Dreiecke
• Winkelsumme:
C
b g
a
α + β + γ = 180◦
• Dreiecksungleichung: c < a + b
A
• Ähnlichkeit, Strahlensätze: Zwei Dreiecke sind
ähnlich, wenn sie gleiche Winkel und / oder
gleiche Seitenverhältnisse haben.
1. Strahlensatz:
b
c
wobei R : Umkreisradius.
und zyklisch:
A∆ = 12 (Grundseite · Höhe) =
f
e
a
a
b
c
= sin(β)
= sin(γ)
=2·R
sin(α)
B
c
S
c
a+c
a
b = d = b+d
• Cosinussatz: c2 = a2 + b2 − 2 · a · b · cos(γ)
• Fläche:
b
d
c
2. Strahlensatz: ae = a +
f
• Sinussatz:
a
b a
c
c · hc
b · hb
a · ha
2 = 2 =
2
◮ Zwei Seiten und Zwischenwinkel: A∆ = b 2· c · sin(α) und zyklisch: bc a
p
◮ Drei Seiten (Heron): A∆ = s(s − a)(s − b)(s − c)
wobei s = 12 (a + b + c).
◮ Drei Winkel und Umkreisradius R: A∆ = 2 R2 · sin(α) · sin(β) · sin(γ)
3.2
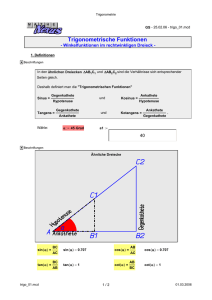
Rechtwinklige Dreiecke
• Satz von Pythagoras: c2 = a2 + b2
• Höhensatz:
hc 2 = p · q
• Kathetensatz (Satz von Euklid):
a2 = c · q
oder
b2 = c · p
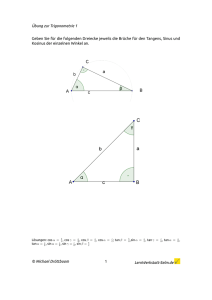
• Trigonometrische Funktionen:
a
sin(α) = c
b
cos(α) = c
a
tan(α) = b
C
Ankathete
a
(bzgl. a) b b
a
A
hc
Gegenkathete
a (bzgl. a)
b
p
q
c = p + q (Hypotenuse)
B
3.3
Vierecke
Allgemeines Viereck
Trapez
D
d
d
Parallelogramm
D
a d
c
A a
c
a
b
C
b
B
A
C
D
b
b
b
m
d
g
g
h
a
B
a C
h
b
e
a
b
a
a
b
f
ba
a
A
B
◮ α + β + γ + δ = 360◦
c
◮ A = a+
·h = m·h
2
◮ A = a · h = a · b · sin(α)
Rhombus (Raute)
Drachenviereck
Rechteck
D
b
a
A
e
a
a
f
b
a
D
c
a
C
A a
a
e
a
A
B
B
e·f
e·f
◮ A = 2 = a2 · sin(α)
◮A= 2
Quadrat
Sehnenviereck
a
D
a
a
◮ A = a2
◮ d=a·
a
d
A
√
2
C
B
= a · c · sin(α)
◮ A =a·b
Tangentenviereck
c
g C
e
A a
b
a
C
a
D
D
d
d f
b
d
a
b
B
C
b
f
a
a
D
c
d
b
B
c
d
g C
d
r
A a
r M
a
b
b
B
◮ α + γ = β + δ = 180◦
◮ a+c = b+d
◮ a · c + b· d = e·f
c+d
◮ A = r · a+b+
2
Symmetrieachsen sind in oranger Farbe gekennzeichnet.
3.4
Kreis
s : Sehne
Segment
b : Bogen
b
T
t : Tangente
t : Tangente
A'
T
P
B
Q
U = 2π · r
Bogenlänge
b = 2π r ·
Fläche
A = π · r2
Sektor
ASek = π r 2 ·
Sektor
r r
s
w a
r M r
s : Sekante
Umfang
M
B'
A
α
360◦
b·r
α
=
◦
360
2
ω
1
=r · π·
−
· sin(ω)
360◦ 2
2
Segment
ASeg
Sehnensatz
PA · PA′ = PB · PB′ = PS
Sekantensatz
QB · QA′ = QA · QB′ = QT
S
2
2
◮ Kreisgleichung des Kreises K mit Mittelpunkt M(u / v) und Radius r:
Mittelpunktsform
Koordinatenform
ausmultiplizieren
K: (x - u) 2 + ( y - v) 2 = r 2
K: x 2 + y 2 + a x + b y + c = 0
quadratisch ergänzen
Tangente τ an K im Punkt T(x0 / y0 ):
τ : (x − u) · (x0 − u) + (y − v) · (y0 − v) = r 2
Kreiswinkelsätze
Sehnentangentenwinkel:
C2
en
ng
Ta
g
C1
te
A
g
g
Thaleskreis:
C2
C3
C3
C1
M
g
r
w r
Sehne
A
M
B
B
C4
◮ gleiche Peripheriewinkel γ.
◮ Zentriwinkel ω = 2 · γ.
◮ gleiche Peripheriewinkel γ = 90◦ .
4
Stereometrie
4.1
Prinzip von Cavalieri
A(x)
Zwei Körper sind volumengleich, wenn
deren Schnittfläche A(x) in jeder Höhe
x den gleichen Flächeninhalt haben.
4.2
A(x)
x
x
Prismen und Zylinder (Kongruente, parallele Grund- und Deckfläche)
Gerades Prisma
Schiefes Prisma
G
G
M
h
◮ h: Höhe.
M
◮ Volumen:
h
G
G
Würfel
G
a
b
a
Zylinder
G
D
D
h
V =G · h
◮ Oberfläche: A = 2 · G + M
Quader
M
M: Mantelfläche.
◮ G: Grundfläche;
r
M
h
r
G
d
a
a
◮ V = a·b·h
◮ V = a3
◮ V = π r2 · h
◮ A = 2 (a · b + a · h + b · h)
√
◮ D = a2 + b2 + h2
◮ A = 6 · a2
√
◮ D = a · 3,
◮ A = 2 · π r 2 + 2π r · h
4.3
d=a·
√
2
◮ M = 2π r · h
Spitze Körper
Gerade Pyramiden Schiefe Pyramiden
S
S
h
h
M
M
G
Gerade, quadratische
◮ h: Höhe.
◮ Volumen:
G
1
·G·h
3
Gerader Kreiskegel
Pyramidenstumpf,
Kegelstumpf
a : Grundkante
h : Höhe
s : Seitenkante
S
h
a
a
V =
◮ Oberfläche: A = G + M
Pyramide
s
M: Mantelfläche.
◮ G: Grundfläche;
a
2
a : Öffnungswinkel
h : Höhe
s : Mantellinie
S
s
a a
2 2
h
G
r
S
S
I
II
D
G
r2
h
MII
2
◮ V = 13 a2 · h
◮ V = 31 πr 2 · h
◮ A = a2 + M
q
2
◮ s = h2 + a2
◮ A = πr2 + πrs, M = πrs
√
◮ s = h2 + r2
◮ VI = h3 (G +
s
r1
√
GD + D)
◮ VII = πh
(r1 2 + r1 r2 + r2 2 )
3
◮ MII = π · s · (r1 + r2 )
4.4
Kugel
V = 43 π · R3
Volumen:
h1
h2
r1
r2
Schicht
(Zone)
◮ Schicht:
R
P0
V = 32 π R2 · h3
Oberfläche:
A = 4 π · R2
◮ Segment: M = 2 π R · h1
Sektor
h3
V = 61 π · h2 · (3 r1 2 + 3 r22 + h2 2 )
◮ Sektor:
R
M
T
◮ Segment: V = 31 π · h1 2 · (3 R − h1 )
Segment
(Kappe)
◮ Schicht:
◮ Sektor:
(Kappe, Haube)
M = 2 π R · h2
(Zone)
√
A = 2 π R · h3 + π R 2Rh3 − h3 2
◮ Kugelgleichung einer Kugel mit Mittelpunkt M(u / v / w) und Radius R:
Mittelpunktsform
Koordinatenform
ausmultiplizieren
K: (x - u)2 + (y - v)2 + (z - w)2 = R2
K: x2 + y2 + z2 + a x + b y + c z + d = 0
quadratisch ergänzen
◮ Tangentialebene T an Kugel im Punkt P0 (x0 / y0 / z0 ):
T : (x − u) · (x0 − u) + (y − v) · (y0 − v) + (z − w) · (z0 − w) = R2
4.5
Polyeder und Platonische Körper
e : Anzahl Ecken
f : Anzahl Flächen
Polyedersatz (Euler): e + f = k + 2 wobei
k : Anzahl Kanten.
Es gibt genau 5 reguläre konvexe Körper (gleichlange Seiten und gleiche Winkel):
a
a
Tetraeder
(Vierflächner)
a
Hexaeder
(Sechsflächner)
a
Oktaeder
(Achtflächner)
a
Dodekaeder
(Zwölfflächner)
Ikosaeder
(Zwanzigflächner)
5.1
Exponential- und Logarithmusfunktionen
◮ Exponentialfunktionen: y = f (x) = ax
• Eulersche Zahl: e = lim 1 +
n→∞
1 n
n
a>0
≈ 2.718... .
• Wachstums- oder Zerfallsprozesse:
N(t) = N0 · at
oder
1
10
10-x =
N(t) = N0 · ek · t
-x
e =
x
y
10x
10
1 x
e
ex
wobei:
8
t
: Zeit.
N0
: Startwert (Population bei t = 0).
N(t)
: Population zur Zeit t.
a = ek
: Wachstumsfaktor: a = 1 + 100 mit
Wachstum (p > 0)
p:
in %
Zerfall
(p < 0)
p
5
pro Zeiteinheit.
2-x =
1
2
x
2
x
a0 = 1
-3
◮ Logarithmusfunktionen: f (x) = loga (x)
x>0
a > 0;
-2
-1
0
1
2
3
x
a 6= 1.
f (x) = loga (x) ist Umkehrfunktion zu f (x) = ax :
• Zehnerlogarithmus:
y
f (x) = log10 (x) = log(x)
log(10x ) = x,
10log(x) = x
(x > 0)
10 x e x 2 x
23 = 8
8
• Natürlicher Logarithmus:
log 2(8) = 3
f (x) = loge (x) = ln(x)
ln(ex ) = x,
eln(x) = x
a0 = 1
(x > 0)
3
2 =
1
23
• Binärer Logarithmus:
4
log2(x)
ln(x)
log(x)
2
1
1 2
f (x) = log2 (x) = lb(x)
4
log2 (2x ) = x,
2log2 (x) = x
(x > 0)
1.
y=
x
loga (1) = 0
log 2( 18) = 3
8
x
5.2
Trigonomtrische Funktionen
Rechtwinkliges Dreieck: 0 < α < 90◦ .
a
P
x
Ankathete
cos(α) = ur = Hypotenuse
Ankathete
Bogenmass: x = α ·
π
180◦
p
Gegenkathete
Ankathete
tan(α) = uv =
u
a
180°
=
cos(x)
sin(α)
cos(α)
tan(x)
2
1
1
sin(x)
v
vp
r=
r
90°
Gegenkathete
sin(α) = vr = Hypotenuse
Gegenkathete
Hy
po
ten
us
e
P
Einheitskreis: α ∈ R.
1
u
270° 32p
zu α gehörende Bogenlänge x am Einheitskreis.
◮ Funktionsgraphen:
y
v
v(x) = sin(x)
1
1
2
y(x) = tan(x)
30
60
90
150
p
p
p
5p
6
6
1
2
3
2
180 210
270
330
360
7p
6
3p
2
11p
6
2p
p
a
x
-1
1
u
1
2
45
90
135
180
225
270
315
360
a
Bogenmass: x = 0 .. 2p
p
p
3p
4
p
5p
4
3p
2
7p
4
2p
x
4
u(x) = cos(x)
1
1
2
Gradmass: a = 0..360°
30
60
90
120
180
240
270
300
360
p
p
p
2p
3
p
4p
3
3p
2
5p
3
2p
a
x
π
3
.
90◦ =
6
3
2
2
-1
-1
◮ Eigenschaften und spezielle Werte:
.
.
.
.
0◦ = 0 30◦ = π6 45◦ = π4 60◦ =
sin(x)
cos(x)
tan(x)
0
1
0
1
2
√
3
2
√
3
3
√
2
2
√
2
2
1
√
3
2
1
2
√
3
◮ Definitionsbereich: Dsin = Dcos = R
◮ Wertebereich:
Wsin = Wcos = [−1, 1]
arcsin(x)
arccos(x)
◮ Umkehrfunktionen:
arctan(x)
π
2
1
0
(±∞)
Periode
360◦
.
= 2π
sin(x + 2π n) = sin(x)
.
360◦ = 2π
cos(x + 2π n) = cos(x)
.
180◦ = π
tan(x + π n) = tan(x)
Symmetrie
sin(π − x) = sin(x)
sin(−x) = − sin(x)
cos(2π − x) = cos(x)
cos(−x) = cos(x)
tan(−x) = − tan(x)
Dtan = R\{( π2 + nπ) , n ∈ Z}.
Wtan = R.
manchmal auch sin−1 (x)
manchmal auch cos−1 (x)
manchmal auch tan−1 (x).
Beziehungen und Eigenschaften trigonometrischer Funktionen
sin(x)
sin2 (x) + cos2 (x) = 1
tan(x) = cos(x)
1
2
cos2 (x) = 1 + tan (x)
sin(−x) = − sin(x)
cos(−x) = cos(x)
tan(−x) = − tan(x)
sin(π − x) = sin(x)
cos(π − x) = − cos(x)
tan(π − x) = − tan(x)
sin( π2 ± x) = cos(x)
cos( π2 ± x) = ∓ sin(x)
1
tan( π2 ± x) = ∓ tan(x)
2 cos2 (x) − 1
cos2 (x) − sin2 (x)
cos(2 x) =
1 − 2 sin2 (x)
tan(2 x) = 1 − tan2 (x)
sin(2 x) = 2 sin(x) cos(x)
sin(3 x) = 3 sin(x) − 4 sin3 (x) cos(3 x) = 4 cos3 (x) − 3 cos(x)
sin2 ( x2 ) =
1 − cos(x)
2
cos2 ( x2 ) =
1 + cos(x)
2
2 tan(x)
tan(3 x) =
3 tan(x)−tan3 (x)
1 − 3 tan2 (x)
1 − cos(x)
tan2 ( x2 ) = 1 + cos(x)
tan(x) + tan(y)
sin(x ± y) = sin(x) · cos(y) ± cos(x) · sin(y)
tan(x + y) = 1 − tan(x) · tan(y)
cos(x ± y) = cos(x) · cos(y) ∓ sin(x) · sin(y)
tan(x − y) = 1 + tan(x) · tan(y)
sin(x) + sin(y) = 2 · sin
cos(x) + cos(y) = 2 · cos
x+y
2
x+y
2
· cos
· cos
x−y
2
x−y
2
tan(x) − tan(y)
sin(x) − sin(y) = 2 · cos
cos(x) − cos(y) = −2 · sin
x+y
2
x+y
2
· sin
· sin
x−y
2
x−y
2
6
Gleichungen
6.1
Fundamentalsatz der Algebra
In R kann jedes Polynom n-ten Grades als Produkt von k ≤ n Linearfaktoren und nicht weiter
zerlegbaren quadratischen Faktoren q(x), welche nicht Null werden können, dargestellt werden:
Gleichung in Normalform:
Zerlegung in Linearfaktoren:
faktorisieren
(falls möglich)
an x n + an-1 x n-1 + .... + a1 x + a0 = 0
an × (x - x1) × (x - x2) × ¼ × (x - xk) × q(x) = 0
ausmultiplizieren
Lösungen x1 , x2 , ¼, xk ablesbar.
In den komplexen Zahlen C zerfällt jedes Polynom n-ten Grades vollständig in Linearfaktoren.
6.2
Quadratische Gleichungen
a · x2 + b · x + c = 0
a, b, c ∈ R,
a 6= 0
Diskriminante: D = b2 − 4 · a · c
Lösungen: x1, 2 =
6.3
−b ±
√
b2 − 4 · a · c
2·a
D≥0
Satz von Vieta:
Produkt der Lösungen: x1 · x2 = ac
Summe der Lösungen: x1 + x2 = − ab
Polynomgleichungen dritten und höheren Grades
a · x3 + b · x2 + c · x + d = 0
a, b, c, d ∈ R, a 6= 0.
Satz: Division durch a 6= 0 führt auf a′ = 1, also x3 + b′ · x2 + c′ · x + d′ = 0. Wenn es eine
ganzzahlige Lösung x1 gibt, dann ist diese Teiler von d′ . Finde Lösung x1 durch Einsetzen
(Probieren) der Teiler von d′ und dividiere die Gleichung anschliessend durch (x − x1 ).
6.4
Numerische Verfahren zur Nullstellenberechnung
Gesucht ist die Nullstelle N(xN / 0) von f (x). Ausgehend von einem Startwert x1 , konstruiere
eine rekursiv definierte Zahlenfolge x1 , x2 , x3 ,... mit Grenzwert xN .
◮ Sehnenverfahren (Regula Falsi)
Wähle P( a / f (a) ) und Q( b / f (b) )
mit f (a) · f (b) < 0.
Mit Startwert x1 = a berechne:
b−x
xn+1 = xn − f (xn ) f (b) − f n(x )
n
f (x )
−→ xN
n→∞
t2
n→∞
Wähle P1 (x1 / f (x1 )) mit f (x1 ) 6= 0. Dann:
xn+1 = xn − f ′ (xn )
n
Tangentenverfahren (Newton)
−→ xN
◮ Tangentenverfahren von Newton
′
f
y
xN x3
x2
t1
x1 x
(die Folge ist nicht notwendigerweise konvergent.)
7
Finanzmathematik
p
Aufzinsfaktor: q = 1 + 100 = 1 + i
p
p = Zins (jährlich) in %,
i = 100 = Zinssatz.
◮ Verzinsung mit Zinseszins: Startkaptial K0 , Laufzeit n Jahre:
K0 ×q K1 ×q K2 ×q
× q1
× q1
× q1
Aufzinsen
Kn-1×q Kn
Abzinsen
× q1
Zeit in Jahren
(Zinsperioden)
Endwert: Kn = K0 · q n
Barwert: K0 = Kn · q1n
◮ Unterjährige Verzinsung:
Linear:
mit Zinseszins:
Stetig:
Kapital KT nach T
Tagen ohne Zinseszins:
m Zinsperioden pro Jahr,
Laufzeit: n Jahre.
Kontinuierlich wird ein
beliebig kleiner Zins bezahlt:
Effektiver Jahreszinssatz:
i m
ieff = 1 + m
√
qm = m qeff
−1
KS = lim Kn·m = K0 · ei · n
m→∞
m Zinsperioden pro Jahr
×qm
×qm
×qm
qm = 1 + mi
×qm
×qeff = × (1 + ieff)
K0
1 Jahr
i n·m
Kn·m = K0 · 1 + m
t=0
T
KT = K0 + K0 · i · 360
Zeit
Km
◮ Rentenrechnung: Zum Startkapital K0 werden n Renten R bezahlt:
Vorschüssige Rentenzahlung
K0 ×q K1 ×q
+R
+R
B0 = Barwert
K2
+R
Kn-1 ×q
Kn
K0 ×q K1 ×q
+R
Endwert = En
+R
B0 = Barwert
Barwert B0 =
Endwert En =
q n −1
K0 q n + R q q − 1
R
K0 + qn−1
q−1
Nachschüssige Rentenzahlung
+R
Barwert B0 =
q n −1
Kn-1 ×q
K2
q n −1
K0 + qRn q−1
Kn
+R
+R
Endwert = En
Endwert En =
q n −1
K0 q n + R q−1
⇒ Bei Schuldentilgung heisst R Tilgungsrate oder Annuität.
◮ Ableitungen in der Finanzmathematik:
Marginale Funktion
(Grenzfunktion)
df
f ′ (x) = dx
Wachstumsrate
f ′ (t)
d
r(t) = f (t) = dt
ln(f (t))
Elastizität
εf (x) =
df
f
dx
x
f ′ (x)
= x · f (x)
8 Differentialrechnung
Voraussetzung: Gegeben sei eine stetige Funktion f : R → R, x 7→ y = f(x).
• Sekantensteigung, Differenzenquotient:
Mittlere Änderungsrate (Steigung)
von f im Intervall [x, x + h]:
f(x + h)
f (x + h) − f (x)
∆y
=
= tan(α)
ms =
∆x
h
∆x→0
8.1
df
Sekante
P1
dx
f
Tangente
ms
• Tangentensteigung, Differentialquotient:
Lokale Änderungsrate (Steigung)
von f im Punkt P( x / f (x) ),
Definition der 1. Ableitung:
mt = f ′ (x) = lim
j
y
f(x)
Dy = f(x + h) - f(x)
a Dx = h
P
f(x)
x
x+h
x
f (x + h) − f (x)
df
∆y
=
= lim
= tan(ϕ)
h→0
∆x
dx
h
Ableitungsregeln: Seien y
= f(x), y = u(x) und y = v(x) stetige
Funktionen, c eine Konstante.
Bedingungen für Extrema und Wendepunkte:
Zusammenhang zwischen f (x), f ′ (x) und f ′′ (x):
y
Funktion = f = y-Werte von f
◮ Additive Konstante: f (x) = u(x) ± c
W1
f ′ (x) = u′ (x)
T
◮ Multiplikative Konst.: f (x) = c · u(x)
f ′ (x) = c · u′ (x)
W2
S
x
f wachsend
f ' (x) > 0
◮ Summenregel: f (x) = u(x) ± v(x)
f
H
y'
f fallend
f ' (x) < 0
f wachsend
f ' (x) ³ 0
1. Ableitung = f' = Tangentensteigung von f
f ′ (x) = u′ (x) ± v ′(x)
f'
x
◮ Produktregel: f (x) = u(x) · v(x)
f ′ (x) = u′ (x) · v(x) + u(x) · v ′(x)
◮ Quotientenregel: f (x) =
f ′ (x) =
u(x)
v(x)
u′ (x) · v(x) − u(x) · v ′ (x)
( v(x) )2
f konkav
f '' (x) < 0
y''
f konvex
f '' (x) > 0
f konkav
f'' (x) < 0
f konvex
f '' (x) > 0
2. Ableitung = f '' = Krümmung von f
f ''
◮ Kettenregel: f (x) = u(v(x))
f ′ (x) = u′ (v) · v ′ (x) = du
· dv
dv dx
,,Äussere mal innere Ableitung.”
x
8.2
Bedingungen spezieller Punkte:
f
f′
f ′′
f ′′′
f (xN ) = 0
-
-
-
Nullstelle
N(xN / 0)
Hochpunkt
H(xH / f (xH ))
f ′ (xH ) = 0
Tiefpunkt
T(xT / f (xT ))
f ′ (xT ) = 0
Sattelpunkt
Terrassenp.
S(xS / f (xS ))
f ′ (xS ) = 0
Wendepunkt
W(xW / f (xW ))
⋆ = notwendige Bedingung,
8.3
⋆
f ′′ (xH ) < 0
⋆
f ′′ (xT ) > 0
⋆
f ′′ (xS ) = 0
-
-
⋆
-
⋆
Ableitungen und Stammfunktionen:
Stammfunktion F(x)
ableiten
Funktion f(x)
integrieren
xn+1
n+1
ln | x |
xn
n · xn−1
1
−1
x = x
− x−2 = − x12
√
3
2
· x2
3
1. Ableitung f' (x)
integrieren
[n 6= −1]
1
x = x2
1√
2· x
ex
ex
ex
x · ( ln | x | − 1 )
ln | x |
1
−1
x = x
1
· ax
ln(a)
ax
ax · ln(a)
x
· ( ln | x | − 1 )
ln(a)
loga | x |
1
x · ln(a)
− cos(x)
sin(x)
cos(x)
sin(x)
cos(x)
− sin(x)
− ln ( | cos(x) | )
tan(x)
1
2
cos2 (x) = 1 + tan (x)
1 − x2
arcsin(x)
√ 1
1−x2
1 − x2
arccos(x)
ln(x2 +1)
2
1
− √1−x
2
arctan(x)
1
x2 +1
Beachte: Variable x in Bogenmass!
x arcsin(x) +
x arccos (x) −
x arctan(x) −
√
√
f ′′ (xW ) = 0 f ′′′ (xW ) 6= 0
(⋆ + ) = hinreichende Bedingung.
ableiten
f ′′′ (xS ) 6= 0
9
Integralrechnung
Definition: F (x) heisst Stammfunktion von f (x), wenn F ′ (x) = f (x) gilt. Zwei verschiedene
Stammfunktionen F1 (x) und F2 (x) von f (x) unterscheiden sich um höchstens eine additive
Konstante: F2 (x) = F1 (x) + C. Die Konstante C heisst Integrationskonstante.
y
• Unbestimmtes Integral = Menge aller StammR
f (x) dx = {F (x) + C | C ∈ R}
funktionen:
dx
A=
Rb
a
y = f(x)
• Bestimmtes Integral, Hauptsatz der
Differential- und Integralrechnung:
f (x) dx = F (b) − F (a) = [ F (x) ]ba
f
A
x
a
x
b
|A| : Fläche unter f zwischen den Integrationsgrenzen x = a und x = b, wenn f zwischen
a und b keine Nullstellen hat.
9.1
Integrationsregeln
◮ Konstantenregel:
Rb
Rb
( c ·f (x) ) dx = c · f (x) dx
Rb
a
( u(x) ± v(x) ) dx =
Rb
Ra
f (x) dx = − f (x) dx
a
◮ Summenregel:
◮ Orientierung des Integrals:
a
Rb
◮ Änderung der
Integrationsgrenzen:
a
◮ Fläche zwischen f1 und f2 :
f (x) dx =
a
u(x) · v (x) dx = [ u(x) ·
v(x) ]ba
f (x) dx +
Rb
A=
−
Rb
v(x) dx
a
Rb
Rb
a
f (x) dx
c
f (x) ≥ 0 für x ∈ [ a, b ]
f (x) ≤ 0 für x ∈ [ a, b ]
◮ Partielle Integration:
′
Rc
a
a
Rb
a
u(x) dx ±
b
a
◮ ,,Vorzeichen” der Fläche:
Rb
⇒
| f2 (x) − f1 (x) | dx
Rb
f (x) dx
a
y
≥0
≤0
f1
A
′
u (x) · v(x) dx
a
f2
b
x
◮ Substitutionsregel: Es sei f (x) = u( v(x) ) eine verkettete Funktion. U( v ) bezeichne eine
Stammfunktion der äusseren Funktion. Dann:
Rb
a
u(v(x)) · v ′ (x) dx =
v(b)
R
v(a)
v(b)
u(v) dv = [ U( v ) ]v(a)
10
Stochastik
10.1
Kombinatorik
Start: Kriterien, welche für eine Stichprobe gelten.
Anordnung
Auswahl
von n Elementen
auf n Plätzen
von k Elementen
aus insgesamt n
Alle n Elemente
Unterscheidbar:
P = n (n - 1) × ... ×2 × 1
n1, n2,.. der insgesamt n Elemente
Ununterscheidbar:
W
P = n!
P = n!
n1!× n2!×...
Permutation
Permutation
ohne Wiederholung
mit Wiederholung
Reihenfolge der
Auswahl beliebig:
Reihenfolge der
Auswahl wichtig:
{a b c} = {a c b}
[a b c] = [a c b]
Kombinationen
Variationen
Elemente dürfen
höchstens einmal
gewählt werden
n
K = k!× (nn!- k)! = k
Elemente dürfen
höchstens einmal
gewählt werden
Elemente dürfen
beliebig oft
gewählt werden
W
K = n + kk - 1
V = (n n!
- k)!
V = nk
Variation
Variation
Kombination
Kombination
ohne Wiederholung
mit Wiederholung
0! = 1
1! = 1
Fakultät: n! := 1 · 2 · . . . · n
n
n
Symmetrie:
=
k
n−k
10.2
Elemente dürfen
beliebig oft
gewählt werden
W
ohne Wiederholung mit Wiederholung
n
n!
Binomialkoeffizient:
= k! · (n−k)!
k
n
n
n+1
Rekursion:
+
=
k
k+1
k+1
Wahrscheinlichkeit, Mengenlehre
◮ Stichprobenraum S: Menge aller möglichen Ereignisse (Grundmenge).
◮ Ereignisse A, B, C: Teilmengen von S.
Bsp.: S = {0, 1, 2, 3, 4, 5, 6, 7}, A = {0, 2, 4, 6}, B = {1, 2, 3, 5},
|A|
Mächtigkeit
A∩B
Schnittmenge A und B
A∪B
Vereinigung
4 ∈ A; 3 ∈
/ A.
Anzahl Elemente in A
A = S \A Komplement
S ohne A
C⊂A
Teilmenge
C enthalten in A
{}, ∅
Leere Menge
0
C
A
3
B
4
6
AÇ
A oder B
S
AÈB
2
5
1
A = S \A
B
7
◮ Laplace-Wahrscheinlichkeit: Alle Elemente in S treten gleichwahrscheinlich auf. Dann:
|A|
günstig
Elemente in A
P (A) = | S | = Anzahl
= möglich
Anzahl Elemente in S
Unmögliches Ereignis p(∅) = 0
Sicheres Ereignis
p(S) = 1
0 ≤ p(A) ≤ 1
Gegenwahrscheinlichkeit
p( A ) = 1 − p(A)
Addititionssatz
p(A ∪ B) = p(A) + p(B) − p(A ∩ B)
Bedingte Wahrscheinlichkeit
p(B | A) : Wahrscheinlichkeit, dass B eintritt, unter
der Bedingung, dass A bereits eingetreten ist:
,,A = Wenn, B = Dann” Ereignis.
p(B | A) =
|A∩B|
p(A ∩ B)
| A | = p(A)
(Verkleinerung des StichProbenraumes von S auf A)
Multiplikationssatz
p(A ∩ B) = p(A) · p(B | A)
Unabhängige Ereignisse
Die Ereignisse A und B sind unabhängig, falls
p(A ∩ B) = p(A) · p(B) gilt.
10.3
Wahrscheinlichkeitsverteilungen
Diskrete Verteilung:
Kontinuierliche Verteilung:
Zufallsvariable X nimmt ausschliesslich
die n Werte x1 , x2 , . . . , xn mit den Wahrscheinlichkeiten
(relative
Häufigkeiten,
Gewichtungsfaktoren) p1 , p2 , . . . , pn an.
Zufallsvariable X nimmt beliebige Werte
x ∈ R an. Die Wahrscheinlichkeit, dass genau x eintritt, heisst Dichtefunktion f (x).
Anmerkung: Streng genommen, ist die Dichtefunktion stetiger Verteilungen überall Null.
z
Fläche links von z: F(z) = P(X £ z) = S pk
p
p
k=0
1
z
Fläche links von z: F(z) = P(X £ z) = ò f(x) dx
-¥
1
s
x1
s
xn X
z m
Dichtefunktion
z
z m
Verteilungsfunktion
p1 + p2 + . . . + pn =
n
P
pk = 1
f(x)
X
zm
Dichtefunktion
n
P
k=1
var(X) = σ 2 =
n
P
k=1
σ=
√
pk · xk
z
f (x) dx = 1
−∞
Mittelwert
(Erwartungswert)
pk · (xk − µ)2
σ2
zm
Verteilungsfunktion
R∞
Normierung
k=1
E(X) = µ =
F(z)
0.5
Varianz
E(X) = µ =
R∞
−∞
var(X) = σ 2 =
R∞
−∞
Standardabweichung
σ=
f (x) · x dx
f (x) · (x − µ)2 dx
√
σ2
Seien X, Y zwei Zufallsvariablen und a, b Konstanten. Dann gilt:
E(a · X + b · Y ) = a · E(X) + b · E(Y )
var(a · X + b) = a2 · var(X)
10.4
Binomialverteilung, Bernoulli (diskrete Verteilung)
Stichprobenraum besteht aus genau zwei Elementen: S = {A, A} mit den gleichbleibenden
Wahrscheinlichkeiten p(A) = p und p(A) = 1 − p. Das Ereignis A trete bei genau n Wiederholungen X mal ein. Dann berechnet sich die Wahrscheinlichkeit, dass...
A mindestens einmal eintritt:
P (X ≥ 1) = 1 − (1 − p)n
A genau k mal eintritt:
n
P (X = k) =
· p k · (1 − p)n−k
k
0≤k≤n
x X
n
0≤x≤n
P (X ≤ x) =
A höchstens x mal eintritt:
Erwartungswert:
E(X) = n · p
Standardabweichung:
σ=
p
k=0
k
· p k · (1 − p)n−k
n · p · (1 − p)
Für σ 2 = n · p · (1 − p) > 9 kann eine Binomialverteilung durch eine Normalverteilung
approximiert werden.
10.5
Normalverteilung (kontinuierliche Verteilung)
• Dichtefunktion:
f (x) = √ 1
2π σ
−
e
(x − µ)2
2σ2
= N (µ, σ)
f(x)
F(x)
2π
z2
2
= N (0, 1)
z-Transformation
z=
s
xm
m+s
f (z) = √1 e−
m-s
Standard-Normalverteilung:
Standard-NormalVerteilung N(0, 1)
Normalverteilung
N(m, s)
X
Symmetrie:
f (µ + x) = f (µ − x)
• Verteilungsfunktion:
F (x) = P (X ≤ x) = √ 1
Rx
2π σ −∞
e−
(t − µ)2
2σ2
dt
x-m
s
f(z)
F(z)
z0
mz = 0
sz = 1
1 2
f (−z) = f (+z)
F (−z) = 1 − F (+z)
W’keit, dass höchstens x eintritt.
Standard-Normalverteilung:
Rz − t2
F (z) = P (Z ≤ z) = √1
e 2dt
2π −∞
• σ-Umgebungen bei Normalverteilung:
1 σ-Umgebung
2 σ-Umgebung
3 σ-Umgebung
p(| µ − x | < 1 σ) ≈ 68.3% p(| µ − x | < 2 σ) ≈ 95.4% p(| µ − x | < 3 σ) ≈ 99.7%
Z
10.6
Statistik: Daten mit einer Variablen
Seien X = {x1 , x2 , . . . , xk } die Werte einer Stichprobe und n1 , n2 , . . . , nk deren absolute
k
P
Häufigkeiten. Für den Umfang der Stichprobe gilt n =
ni = n1 + n2 + . . . + nk .
i=1
n
Die relative Häufigkeit ist durch p(xi ) = ni definiert. Insbesondere gilt
Daten
Arithmetischer
Mittelwert
Median
k
P
p(xi ) = 1.
i=1
Einzeldaten
Gruppendaten (Klassen)
n Werte x1 , x2 , . . . , xn
k Werte x1 , x2 , . . . , xk der
absolute Häufigkeit n1 , n2 , . . . , nk
n
P
xi
x = E(X) = n1
i=1
k
k
P
P
ni xi =
p(xi ) xi
x = E(X) = n1
i=1
i=1
Der Median x0.5 der Werte einer geordneten Stichprobe ist...
• der in der Mitte liegende Wert, falls n ungerade.
Modalwert
(Modus)
• Der Mittelwert beider mittleren Werte, falls n gerade.
Der Modalwert xM ist der am häufigsten auftretende Messwert.
R = xmax − xmin
Spannweite
Varianz∗
1
s2x = n−1
n
P
i=1
s2x =
(xi − x)2
k
P
i=1
1
s2x = n−1
k
P
i=1
ni (xi − x)2
oder
p(xi ) (xi − x)2 = E(X 2 ) − ( E(X) )2
[*] Wenn die Werte x1 , x2 , . . . , xn eine Population darstellen oder wenn die Varianz
innerhalb der Stichprobe gesucht ist, ersetze man den Nenner n − 1 durch n.
p
Standardabweichung: sx = s2x
s
Um Stichproben zu vergleichen, dient der Variationskoeffizient V = xx ·100%
Box plot: Ermittle den Median x0.5 , das obere (x0.75 ) und das untere (x0.25 ) Quartil,
die kleinste (xmin ) und die grösste (xmax ) Stichprobe. Dann
kleinste 25%
aller Daten
xmin
25%
x0.25
25%
x0.5
grösste 25%
aller Daten
x0.75
xmax
Ungleichung von Tschebyschev:
Für eine Stichprobe mit Mittelwert x und Varianz s2x gilt für die Wahrscheinlichkeit p dass ein
s2
Messwert x innerhalb einer ±λ-Umgebung um den Mittelwert liegt: p(| x − x | < λ) ≥ 1 − λx2
11
Mathematische Symbole
A ⇒ B
Folgerung: Aus A folgt B.
A ⇔ B
Äquivalenz: A ist ¨aquivalent (gleichwertig) zu
N, Z, Q, R
Zahlenmengen
D,
Definitionsmenge, Wertemenge.
W
f : x 7→ y = f (x) y [abhängige Var.] ist Funktion von x [unabhängige Var.]
A = {a, b, c}
Die Menge A der Elemente a, b, c.
[a, b]
Das Intervall zwischen (und mit) a und b.
(a, b)
Das Intervall zwischen (aber ohne) a und b.
5 ∈ N
Beispiel: (2, 5] = Menge aller x, so dass 2 < x ≤ 5 gilt.
Element: Die Zahl 5 liegt in der Menge N; (5 ist natürliche Zahl).
1.5 ∈
/N
Nicht Element: Die Zahl 1.5 liegt nicht in der Menge N.
P∈ f
Der Punkt P liegt auf dem Graphen der Funktion f .
A ⊂ B
Enthalten in: Die Menge A ist enthalten in B.
A ∩ B
A Geschnitten mit B: Elemente, welche in A und in B liegen.
g ⊂ E
Die Gerade g (=Punktemenge) liegt auf der Ebene E.
g ∩ E
Gerade g geschnitten mit E
A ∪ B
A Vereinigt mit B: Elemente, welche in A oder in B liegen.
A\B
A Ohne B: Elemente, welche in A aber nicht in B liegen.
|
Bedingung (Wenn). Beispiele:
D = {x ∈ R | x < 1} = Menge aller reellen x, welche kleiner als 1 sind.
p(B | A) = W’keit, dass B eintritt, wenn A bereits eingetreten ist.
∀
Für alle: Beispiel: ∀ x ∈ R gilt...
∃
Es gibt: Beispiel:
∃x ∈ R:
es gibt eine reelle Zahl x...
Das griechische Alphabet
A
B
Γ
∆
E
Z
α
Alpha
β
Beta
γ
Gamma
δ
Delta
ǫ, ε Epsilon
ζ
Zeta
H
Θ
I
K
Λ
M
η
Eta
θ, ϑ Theta
ι
Iota
κ
Kappa
λ
Lambda
µ
Mü
N
Ξ
O
Π
P
Σ
ν
ξ
o
π
ρ
σ, ς
Nü
Xi
Omicron
Pi
Rho
Sigma
T
Y
Φ
X
Ψ
Ω
τ
Tau
υ
Ypsilon
φ, ϕ Phi
χ
Chi
ψ
Psi
ω
Omega