2 Mechanik - physik.uzh.ch
Werbung

2 Mechanik
2.1 Einleitung
In der Mechanik interessieren wir uns fur Bewegungsablaufe, solche des taglichen Lebens (Abbildung 2.1), solche extrem grosser Massen uber astronomische Distanzen (Abbildung 2.2) oder
solche submikroskopischer Teilchen bei extrem hohen Geschwindigkeiten (Abbildung 2.3). Alle
diese Bewegungen unterliegen den gleichen Gesetzmassigkeiten. Um diese zu erkennen gehen wir
schrittweise vor. Wir untersuchen zunachst, welches die minimalen Anforderungen sind, damit
wir eine Bewegung vollstandig beschreiben konnen. Der einschlagige physikalische Oberbegri
ist Kinematik. Wenn dann die Beschreibung vorliegt, fragen wir nach den Ursachen fur eine
bestimmte Bewegungsform. Die Kinematik wird dann zur Dynamik erweitert.
Abbildung 2.1: Winterszene (Quelle: Halliday/Resnick/Walker)
Das Beispiel der Bewegung einer Kugel mag als Erlauterung dienen. Lassen wir diese in
einem U-Prol rollen, dann wird sie gefuhrt, d. h. die Bewegung der Kugel folgt der jeweiligen Richtung des Prols wie die Eisenbahn derjenigen der Schienen. Um die Bewegung zu
beschreiben genugt es die Zeiten anzugeben, an denen die Kugel bestimmte Positionen auf der
Schiene passiert. Wir brauchen eine Langenangabe (d) und eine Zeitangabe (t): d(t). Weil nur
eine Langenangabe notwendig ist sprechen wir von einer eindimensionalen Bewegung. Diese
muss, wie uns das Beispiel der Schiene lehrt nicht notwendigerweise geradlinig verlaufen, auch
bei einer gekrummten Schiene genugt ein solcher Fahrplan zur Beschreibung des Bewegungsablaufes. Allerdings muss dieser Fahrplan detaillierter sein als der einer Eisenbahn. Aus den
Kursbuchangaben, den Ankunftszeiten am Zielort und den Abfahrtszeiten am Ausgangspunkt
und der entsprechenden Distanz lasst sich nicht ermitteln, wann die Eisenbahn Zwischenstationen durchfahrt, da sie ja nicht notwendigerweise immer gleich schnell fahrt. Das gleiche gilt fur
den Weg der Kugel im Prol. Lasst man die Kugel nun auf einem Tisch rollen, so muss man
schon zwei Distanzen angeben, die Bewegung verlauft in einer Ebene, ist nicht mehr notwendigerweise geradlinig und auch nicht mehr gefuhrt durch eine Schiene. Durch die Angabe zweier
Abstande, z. B. von der Langs- und der Breitseite des Tischs mit den entsprechenden Zeiten,
2.1
Abbildung 2.2: Die Astronauten
J. Allen und D. Gardner bergen einen Kommunikationssatelliten wahrend einer Space Shuttle
Mission (1984). (Quelle: Halliday/Resnick/Walker)
Abbildung 2.3: Spuren von Sekundarteilchen, die bei dem Stoss eines Blei-Atomkerns mit einer Energie von 33 TeV (1012 eV) entstehen.
Experiment NA49, CERN, Genf.
Die geladenen Sekundarteilchen ionisieren bei der Passage eines mit
Gas gefullten Tanks entlang ihres
Weges die Gasatome. Die freiwerdenden Ionenpaare driften in elektrischen Feldern zu den Anodendrahten und werden dort als Strompuls elektronisch registriert. Das
Bild zeigt die aus dieser Information rekonstruierten Spuren. (NZZ
13. 9. 1995)
2.2
kann die Bewegung vollstandig charakterisiert werden. Die zweidimensionale Bewegung braucht
zwei sogenannte Koordinatenangaben. Wenn wir von der Lage der Kugel sprachen, haben wir
eigentlich von der Lage des Mittelpunkts der Kugel gesprochen. Fur jeden einzelnen Punkt der
Kugel genugen die Angaben nicht. Weil jedoch die einzelnen Kugelteile einen festen Abstand
zum Zentrum haben, braucht man allerdings auch keine 1024 oder mehr Angaben fur die Lage
jedes einzelnen Atoms der Kugel.
Hangen wir die Kugel an einem Faden auf, so erhalten wir ein sogenanntes Pendel, wie in
Abbildung 2.4 gezeigt. Einmal angestossen schwingt die Kugel hin und her, periodisch kommt sie
wieder an den Ausgangspunkt zuruck. Die Bewegung verlauft in einer Ebene, aber es genugt den
Winkel des Pendelfadens relativ zur Vertikalen () zu allen Zeiten anzugeben, um die Bewegung
vollstandig zu beschreiben: (t). Auch hier haben wir es mit einer eindimensionalen Bewegung
zu tun, allerdings entlang eines Kreises mit dem Aufhangepunkt als Zentrum. Die relevante
Koordinate ist nun nicht mehr eine Lange, sondern ein Winkel.
DuD
DD
- DD 1
DD
DD
D j;;@@
uD
DD
DD
DD
DD
DD
jLLLL j
u
LL
L
LL
- L 2
LL
L
;@@ L j
;
@@;; @@;;
uD
DD
uL
uD
DD
DD
DD
DD
DD
uD
u
DD
DD
DD
DD
DD
j \ \ \ \ j
DD
DD
DD
DD
j T T T T j
Abbildung 2.4: Zwei Fadenpendel sind via eine kleine Feder miteinander verbunden. Die unteren
drei Bilder zeigen jeweils die Anfangslage fur die Situation, wo beide Pendel im Gegentakt (links)
oder im Takt (Mitte) schwingen, bzw. wo nur ein Pendel am Anfang ausgelenkt wird (rechts).
Nimmt man noch ein zweites, identisches Pendel hinzu, so andert sich prinzipiell nichts.
Die beiden Pendel, schwingungsfahige Systeme werden wir sie spater nennen, sind unabhangig
voneinander, und fur jedes benotigt man eine Winkelangabe (1 ; 2) fur die Beschreibung des
2.3
momentanen Zustands. Verbinden wir jedoch die beiden Pendel durch eine Feder, so sind
die Bewegungen miteinander gekoppelt, wie sich leicht zeigen lasst, wenn man verschiedene
Ausgangssituationen und die daraus resultierende Bewegung miteinander vergleicht:
i) Beide Pendel werden zur gleichen Seite ausgelenkt und zur gleichen Zeit von gleicher Hohe
losgelassen. Man beobachtet zwei im Takt schwingende Pendel. Weil 1 (t) = 2 (t) gilt,
genugt die Angabe eines Winkels in Funktion der Zeit.
ii) Beide Pendel werden zu verschiedenen Seiten ausgelenkt und zur gleichen Zeit von gleicher Hohe losgelassen, Man beobachtet zwei im Gegentakt schwingende Pendel. Weil
1(t) = ;2(t) gilt, genugt es wieder nur einen Winkel als Funktion der Zeit zu kennen.
iii) Wird nur ein Pendel am Anfang ausgelenkt, das andere am Anfang in Ruhe gelassen, so
beobachtet man am ausgelenkten Pendel ein Abklingen der Schwingung, wahrend gleichzeitig das zunachst ruhende Pendel langsam auch ins Schwingen gerat. Wenn dann das
erste Pendel schliesslich ruht, zeigt das zweite seinen maximalen Ausschlag und der Prozess beginnt sich wieder umzukehren, bis dann wieder die Ausgangssituation erreicht wird.
Beide Winkel sind nun zur Beschreibung notwendig, aber die Bewegung der beiden Pendel ist voneinander abhangig und daher sind die beiden Winkel miteinander verknupft:
1 = f (2).
Schon dieses einfache System der beiden gekoppelten Pendel ist oenbar zu recht komplizierten Bewegungen fahig, deren zeitlicher Verlauf uns Abbildung 2.5 zeigt. Die Frage, die sich der
Physiker stellt, ist: \Was ist die minimale Anzahl Angaben, die zur Beschreibung eines Systems
notwendig sind, und welche Gesetze erlauben es uns seinen Zustand zu einem spateren Zeitpunkt
vorherzusagen, wenn er zu einer bestimmten Zeit bekannt ist ?" Es zeigt sich, dass nur wenige
Gesetze existieren, die uns erlauben, die Antwort auf diese Frage zu geben. Diese sogenannten Bewegungsgesetze verbinden die Ursachen der Bewegung, als die wir die Krafte erkennen
werden, mit den Bewegungsablauf. Fur das gekoppelte Pendel gilt es die Anziehungskraft der
Erde auf die beiden Kugeln und die Wechselwirkung der beiden Pendel durch die koppelnde
Feder zu berucksichtigen. Die Tatsache, dass ein einzelnes Pendel wieder zu seiner Ausgangslage zuruckkehrt ist eine Folge des Energieerhaltungssatzes. In die Bewegungsgesetze gehen ein:
Geometrie, Masse und Zeit. Fassen wir kurz zusammen:
Mechanik
,
Beschreibung ) Bewegungsgesetze
Kinematik
*
Geometrie, Zeit
Masse
2.4
Bewegungsablaufe
( Ursachen
Dynamik
Krafte
Doppelpendel mit Kopplung
Beide Pendel im Gegentakt
1
0.5
0
-0.5
-1
Beide Pendel im Takt
1
0.5
0
-0.5
-1
0
20
1
0.5
0
-0.5
-1
0
Phi 1
1
0.5
0
-0.5
-1
20
20
0
20
20
0
20
Phi 1 - Phi 2
Phi 2
20
0
Phi 1 + Phi 2
1
0.5
0
-0.5
-1
0
20
1
0.5
0
-0.5
-1
Phi 1 + Phi 2
2
1
0
-1
-2
0
Phi 2
2
1
0
-1
-2
0
20
Phi 1
1
0.5
0
-0.5
-1
Phi 2
1
0.5
0
-0.5
-1
0
Phi 1
1
0.5
0
-0.5
-1
0
Ein Pendel in Ruhe
20
Phi 1 + Phi 2
1
0.5
0
-0.5
-1
0
20
Phi 1 - Phi 2
0
20
Phi 1 - Phi 2
Abbildung 2.5: Doppelpendel mit Kopplung: Winkelauslenkung in Funktion der Zeit fur die
drei Anfangssituationen aus Abbildung 2.4. Oberste Reihe: 1 (linke Kugel), zweite Reihe 2
(rechte Kugel), dritte Reihe 1 + 2 (Mittelpunkt der beiden Kugeln), unterste Reihe 1 ; 2
(Distanz zwischen den beiden Kugeln)
2.5
2.2 Kinematik: Geradlinige Bewegung
2.2.1 Einfuhrung der Begrie
Wir schranken den Kreis der beobachteten Bewegungen ein auf Falle, wo die Bewegung geradlinig ist. Dies kann entlang der Horizontalen passieren wie bei einem Auto auf ebener Strasse,
in der Vertikalen wie beim Fall oder entlang einer geneigten Ebene. Die Ursache der Bewegung
interessiert uns fur den Moment nicht. Ferner soll das sich bewegende Objekt entweder ein extrem kleines, nahezu punktformiges Teilchen sein, wie z. B. ein Elektron, oder ein ausgedehntes
Objekt, bei dem alle Teile starr miteinander verbunden sind. Im letzteren Fall bewegen sich alle
Teile in gleicher Weise sich in der gleichen Richtung, wenn man Rotation ausschliesst, wie z. B.
bei einem Skifahrer in einem geraden Schussteil einer Abfahrt.
Ein Objekt zu lokalisieren bedeutet die Position relativ zu einem Referenzpunkt festzustellen,
den man haug als Ursprung (origo: O) einer Achse bezeichnet, hier x;Achse genannt:
-x
O
Die Position entlang dieser Achse, der Ort x, wird in Vielfachen eines Achsenabschnitts (z.
B. 1 cm) gemessen. In welcher Richtung sich das Objekt bewegt wird durch das Vorzeichen
angegeben:
negative Richtung
;4 ;3 ;2 ;1
O
1
2
3
4
5
6
positive Richtung
- +x
7
[cm]
Bewegt sich ein Objekt von einem Ort x1 zu einem anderem Ort x2, so ist die Ortsveranderung (Verschiebung):
x = x2 ; x1
Mit dem Symbol bezeichnen wir immer die A nderung der entsprechenden Grosse. Die Ortsveranderung sollte nicht mit dem zuruckgelegtem Weg verwechselt werden :
1
3
1
3
1
3
-5
-5
x = 4 cm, Weg = 4 cm
x = 2 cm, Weg = 6 cm
5 x = ;4 cm, Weg = 4 cm
Ortsveranderung ist ein Beispiel fur eine Vektorgrosse, die durch Angabe von Betrag und
Richtung bestimmt ist.
Eine kompakte Form geradlinige Bewegungen darzustellen, ist ein Diagramm, das x als
Funktion der Zeit t darstellt. Als Beispiel zeigt uns Abbildung 2.6 die Hohe uber dem Boden,
die das in Abbildung 2.7 gezeigte Gurteltier wahrend seines Sprungs erreicht.
2.6
x[m]
x2,t2
0.7
0.5
0.3
0.1
x1,t1
α
0.2
0.4
0.6
t[s]
Abbildung 2.6: Sprunghohe uber dem Boden
x [m] in Funktion der Zeit t [s] fur das springende Gurteltier
Abbildung 2.7: Aufgeschrecktes Gurteltier
Das Diagramm in Abbildung 2.6 beschreibt nicht nur die Bewegung, sondern oenbart auch
wie schnell sich das Gurteltier bewegt. Mehrere physikalische Grossen sind mit der Aussage \wie
schnell" assoziiert. Eine ist die mittlere Geschwindigkeit
x1 = Ortsveranderung
v = xt = xt2 ;
Zeitintervall
2 ; t1
Die mittlere Geschwindigkeit (velocity) entspricht der Steigung tan der Geraden, die den
Anfangspunkt x1 (t1 ) mit dem Endpunkt x2(t2 ) des Intervalls verbindet. Auch v wird erst durch
Betrag und Richtung bestimmt. Das Vorzeichen von v wird durch x bestimmt, da bei einer
Messung zu aufeinanderfolgenden Zeiten t immer positiv ist.
Die mittlere Schnelligkeit
ckgelegter Weg
s = zuruZeitintervall
ist eine weitere Art, wie die Phrase \wie schnell" ausgelegt werden kann. Im in Abbildung 2.6
eingezeichneten Weg des Gurteltiers bis zum Maximum sind die Denitionen von v und s gleich.
Dies gilt auch, wenn man zum Beispiel die Zeit misst, die eine Kugel, eine Schallwelle oder
ein Zug zwischen zwei Orten bekannter Entfernung braucht, und aus Entfernung und Zeit die
mittlere Schnelligkeit oder Geschwindigkeit bestimmt. Nimmt man aber z. B. beim Gurteltier
auch den Ruckweg mit, so ist v = 0 wegen x = 0. s ist jedoch fur den Aufstieg und Fall gleich.
\Wie schnell" kann aber auch bedeuten, wie schnell bewegt sich ein Objekt in einem bestimmten Zeitpunkt, was ist seine momentane Geschwindigkeit. Diese momentane Geschwindigkeit
2.7
denieren wir als den Grenzwert der mittleren Geschwindigkeit, wenn das Zeitintervall immer
kleiner wird.
x dx
v = (momentane) Geschwindigkeit = lim
t!0 t
dt
Der Zusatz \momentan" wird in der Physik in der Regel weggelassen. Obwohl der Nenner im
obigen Grenzwert, das Zeitintervall t, immer kleiner wird, ist der Grenzwert normalerweiser
endlich, weil auch der Zahler immer kleiner wird. Nennen wir x2 = x(t); t2 = t und x1 =
x(t0); t1 = t0, dann ist die Geschwindigkeit zur Zeit t0 gegeben durch
v(t ) = lim x(t) ; x(t0) dx j
0
t!t0
t ; t0
dt t=t0
In der Sprache der Mathematik { das Bilden solcher Grenzwerte wird in der Dierentialrechnung
behandelt { ist die Geschwindigkeit v (t0 ) die Ableitung der Funktion x(t) an der Stelle t0 (siehe
auch Storrer: Einfuhrung in die mathematische Behandlung der Naturwissenschaften, Kap. 4,
\Die Ableitung", p. 39 { 55). Wenn man die Dierenzen im Quotient gegen Null gehen lasst,
macht man den U bergang vom Dierenzenquotient zum Dierentialquotient. Geometrisch entspricht die Ableitung der Steigung der Tangente an die Kurve x(t) im Punkt t0 (siehe Abbildung
2.8):
x(t) ; x(t0) = tan v(t0) = tlim
0
!t
0
x(t)
t ; t0
x(t)
∆x
x(t0)
α
∆t
α0
t0
Abbildung 2.8: Geometrische Bedeutung der Ableitung: U bergang
vom Dierenzenquotienten zum
Dierentialquotienten entspricht
dem U bergang von der Steigung
der Sekanten zur Steigung der
Tangenten.
t
Fur die Ableitung werden auch alternativ die Bezeichnungen
dx ; x;_ x0
dt
verwendet. Das Bilden der Ableitung wird Dierenzieren genannt. Die entsprechenden Methoden werden z. B. in Storrer, op. cit., Kap. 5 \Technik des Dierenzierens", p. 63 { 75
behandelt. Der Betrag der Geschwindigkeit wird Schnelligkeit genannt. Fur unser Gurteltier
(Abbildung 2.6) konnen wir durch Messung der Steigung der Tangente die Geschwindigkeit
ermitteln. Es ergibt sich die in Abbildung 2.9 dargestellte Geschwindigkeitskurve.
Wenn ein Objekt seine Geschwindigkeit andert, sprechen wir von Beschleunigung. Im taglichen Leben bedeutet Beschleunigung normalerweise Geschwindigkeitszunahme, in der Physik
2.8
v6
Abbildung 2.9: Geschwindigkeit [m/s] (linke Skala)
und Beschleunigung [m/s2]
(rechte Skala) des Gurteltiers (Abbildungen 2.6 und
2.7).
6a
@@
[m/s2]
[m/s]
@@
10
@ v(t)
2
@@
@@
@@# Max. Hohe
0.1
0.3 @ 0.5
0.7
t [s]
@
@
@@
-2
a(t)
@@ ! -10
@@
@@
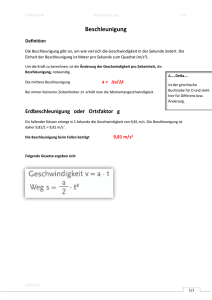
enthalt dieser Begri sowohl Zu- wie Abnahme, also auch das Abbremsen. Die mittlere Beschleunigung (acceleration) a wird deniert als
v1 = v
a = vt2 ;
;
2 t1 t
Analog zur Denition der momentanen Geschwindigkeit denieren wir als momentane Beschleunigung
v(t) ; v(t0) = dv j
a = dv
oder praziser
a(t0) = tlim
!t
dt
t;t
dt t=t0
0
0
Die Beschleunigung a(t) ist gegeben durch die Steigung der Tangente an die Kurve v (t). Fur
das Gurteltier (Abbildung 2.9) ist v (t) eine Gerade, d. h. die Steigung der Kurve ist konstant
und negativ: a = ;9:8 m/s2.
Fur den Spezialfall konstanter Beschleunigung kann man x(t); v (t); a(t) explizit als Funktionen der Zeit angeben. Bezeichnen wir die konstante Beschleunigung mit a0, sowie den Ort
und die Geschwindigkeit zur Zeit t0 mit x(t0 ) = x0 bzw. v (t0 ) = v0 , so erhalten wir
x(t) = x0 + v0t + a20 t2
v(t) = v0 + a0t
a(t) = a0
Man kann dies durch Ableiten verizieren.
Die Umkehroperation des Dierenzierens ist das Integrieren (siehe Storrer, op. cit., Kap. 9).
So wie man v (t) und a(t) durch Dierenzieren von x(t) bzw. v (t) erhalt, kann man umgekehrt
x(t) und v(t) durch Integrieren von v(t) bzw. a(t) erhalten:
v(t) =
Zt
t0
a(t0)dt0 + v(t0)
x(t) =
Zt
t0
v(t0)dt0 + x(t0)
v(t) ist eine Stammfunktion von a(t), x(t) ist eine Stammfunktion von v(t) (Storrer, op. cit.,
Kap. 12, p. 156 .). Wir haben die Integrationsvariable t0 getauft, um sie von der oberen
2.9
Grenze des Integrals t zu unterscheiden. Fur den Spezialfall konstanter Beschleunigung erhalten
wir
Zt
a(t) = a0 ) v(t) = a0dt0 + v(t0) = a0(t ; to) + v(t0)
t0
) v(t) = a0t + v0
Zt
Zt
Zt
x(t) = v(t0)dt0 + x(t0) = a0(t0 ; to)dt0 + v(t0)dt0 + x(t0)
t0 = 0; v(0) = v0
t0
t0
t0
x(t) = a20 (t ; t0 )2 + v(t0)(t ; t0) + x(t0)
t0 = 0; v(0) = v0; x(0) = x0 ) x(t) = a20 t2 + v0t + x0
Wenn wir den Verlauf von v (t) und a(t) gegen die Zeit auftragen, wie wir dies am Beispiel des
Gurteltiers in Abbildung 2.9 getan haben, dann lasst sich das Integral auch aus der graphischen
Darstellung bestimmen. Abbildung 2.10 zeigt, dass die Flache unter der Geschwindigkeitskurve
dem zuruckgelegten Weg entspricht.
Abbildung 2.10: Geschwindigkeitsverlauf fur eine konstante Beschleunigung. Die
schraerte Flache entspricht
dem zwischen der Zeit t0 und
der Zeit t zuruckgelegten
Weg. tE markiert das Ende der Bewegung, fur das
Gurteltier aus Abbildung 2.6
die Ruckkehr zum Boden.
Da die Steig- und Fallhohe
gleich sind, ist die Flache
der beiden Dreiecke oberhalb und unterhalb der Achse gleich.
@6@
@@ v0 ; a0t
@;;
v(t) @
@@
@
@ # Max. Hohe
tE t @
t0
@@
t
@@
@
@@
@@
@@
v0
2.2.2 Experimentelles Beispiel
Zum Abschluss betrachten wir als Beispiel die Bewegung eines reibungsfrei gleitenden Reiters auf
einer Luftkissenschiene (Abbildung 2.11). Im ersten Fall (Abbildung 2.12 lauft der Reiter mit
konstanter Geschwindigkeit bis zum Ende der Schiene, wo durch den Stoss mit Begrenzung die
Bewegungsrichtung und die Geschwindigkeit umgekehrt wird. Im zweiten Fall (Abbildung 2.13)
ist der Reiter an den beiden Enden mit einer dunnen Feder befestigt. Die Bewegung des Reiters
kann mit einer elektrischen Messvorrichtung registriert werden. In festen Zeitabstanden wird die
Position gemessen. Die beiden Abbildungen zeigen zwei solche Messprotokolle. Durch Berechnen
2.10
Abbildung 2.11: Luftkissenschiene.
des Dierenzenquotienten kann die Geschwindigkeit numerisch ermittelt werden, ebenso aus den
Geschwindigkeitsdierenzen die Beschleunigung.
Die Analyse des ersten Messprotokolls { konstante Schnelligkeit { bestatigt die Beziehungen,
die wir oben fur den Spezialfall konstanter Beschleunigung gemacht haben. Ausser an den
Enden, wenn sich die Bewegungsrichtung umkehrt, ist a(t) = 0, v (t) = v0 auf dem Hinweg
und v (t) = ;v0 fur den Ruckweg und damit messen wir eine lineare Zunahme bzw. Abnahme
des Ortes mit der Zeit fur den Hin- bzw. Ruckweg. Die Tatsache, dass der Reiter immer
wieder die gleiche Strecke zwischen den beiden Enden zurucklegt, macht seine Bewegung zu
einer periodischen Bewegung, hier durch die Sagezahnkurve reprasentiert.
Das zweite Messprotokoll zeigt ebenfalls eine periodische Bewegung. Wir erkennen in der
Kurve eine Sinus- bzw. Cosinusfunktion. Nennen wir die Zeit, die der Reiter fur den Hin- und
Ruckweg braucht die Periode T , die maximale Distanz vom Zentrum der Schiene, die der Reiter
erreicht A, dann konnen wir die gemessene Kurve durch die folgende Funktion beschreiben:
x(t) = A cos( 2 t) = A cos(!t)
! 2
T
T
Man uberzeugt sich leicht, dass fur x = A gilt fur t = 0, t = T und fur alle weiteren Zeiten
t = nT , mit n = ganze Zahl. Durch Dierenzieren nden wir
2
2
v(t) = dx
dt = ; T A sin( T t) = ;!A sin(!t)
a(t) = dv = ; 422 A cos( 2 t) = ;!2A cos(!t)
dt
T
T
Diese Zusammenhange werden durch die Messprotokolle bestatigt. Die neu eingefuhrte Grosse
! nennt man auch die Kreisfrequenz.
2.11
Luftkissen 4.11.93
Donnerstag, 4. November 1993 9:20 Uhr
Ort
x (t)
2
0
100.000
-2
Anzahl Messungen
Geschwindigkeit
v (t)
0
1
2
3
4
5
-0.15
0
1
2
3
4
5
1
2
3
4
5
0.15
0
0.0500
Intervall
Beschleunigung
a (t)
0.05
0
-0.05
0
Abbildung 2.12: Messprotokoll fur den mit konstanter Schnelligkeit auf der Luftkissenschiene
sich hin- und herbewegenden Reiter.
Luftkissen 4.11.93
Donnerstag, 4. November 1993 9:20 Uhr
Ort
x (t)
0.4
0
100.000
Anzahl Messungen
Geschwindigkeit
v (t)
-0.4
0
1
2
3
4
5
-0.15
0
1
2
3
4
5
1
2
3
4
5
0.15
0
0.0500
Intervall
Beschleunigung
a (t)
0.05
0
-0.05
0
Abbildung 2.13: Messprotokoll fur den sich periodisch an eine Feder gekoppelt hin- und herbewegenden Reiter auf der Luftkissenschiene.
2.12
Zusammenfassung: Geradlinige Bewegung
Ort: Der Ort x gibt an, wo sich ein Teilchen bezuglich des Ursprungs O einer Achse bendet.
Eine Achsenrichtung wird als die positive Richtung deniert.
Ortsveranderung: Die Ortsveranderung x = x2 ; x1 ist eine Vektorgrosse, da nicht nur die
zuruckgelegte Distanz, der Betrag jxj > 0, sondern auch die Richtung (Vorzeichen) fur
ihre Kenntnis notwendig ist.
Mittlere Geschwindigkeit: Wenn das Teilchen seine Ortsveranderung x im Zeitintervall
t = t2 ; t1 vornimmt, ist die mittlere Geschwindigkeit gegeben durch
v = xt
v ist ebenfalls eine Vektorgrosse. In einem Ort-Zeit-Diagramm ist v die Steigung der
Geraden, die Anfangs- und Endpunkt des Intervalls verbindet.
Mittlere Schnelligkeit: Die mittlere Schnelligkeit eines Teilchens ist der Quotient der total
in einem Zeitintervall zuruckgelegten Distanz durch das entsprechende Zeitintervall.
Geschwindigkeit: Die (momentane) Geschwindigkeit ist deniert als Ortsanderung pro Zeiteinheit:
x = dx
v = lim
v ist eine Vektorgrosse:
t!0 t
dt
In einem Ort-Zeit-Diagramm ist v die Steigung der Tangente an die Bahnkurve zum Zeitpunkt der Geschwindigkeitsmessung. Man erhalt v (t) durch Dierenzieren von x(t).
Schnelligkeit: Mit Schnelligkeit bezeichnet man den Betrag der Geschwindigkeit.
Mittlere Beschleunigung: Die mittlere Beschleunigung ist der Quotient der Geschwindigkeitsanderung in einem Zeitintervall durch das entsprechenden Zeitintervall:
v
a= t
a ist eine Vektorgrosse:
Beschleunigung: Die (momentane) Beschleunigung ist deniert als Geschwindigkeitsanderung
pro Zeiteinheit. Man erhalt a(t) durch Dierenzieren von v (t).
v = dv
a = lim
t!0 t
dt
a ist eine Vektorgrosse:
Integralbeziehungen: Man erhalt x(t) durch Integrieren von v(t), und v(t) durch Integrieren
von a(t).
x(t) = x(t0) +
Zt
t0
v(t0)dt0
2.13
v(t) = v(t0) +
Zt
t0
a(t0)dt0
Zusammenfassung: Geradlinige Bewegung
Spezialfall konstanter Beschleunigung a0:
x(t) = x(t0) + v(t0)(t ; t0) + 21 a0(t ; t0)2
t0 = 0 : x(t) = x0 + v0t + 12 a0t2
v(t) = v(t0) + a0(t ; t0 )
v(t) = v0 + a0t
2.3 Vektoren
Hier verweisen wir auf Storrer, op. cit., Kap. 1, 2, p. 1 { 38.
2.4 Bewegung in zwei und drei Dimensionen
2.4.1 Allgemeine Denitionen
Bewegt sich ein Teilchen entlang einer beliebig verlaufenden Bahn im Raum, so markieren wir
seine Position relativ zu einem Referenzpunkt durch den Ortsvektor ~r.
B
A
r(t)
Bahn
~r enthalt die Information uber den Abstand zum Referenzpunkt: OA j~rj = Lange des Ortsvektors und die
Richtung im Raum. ~r ist zeitabhangig.
r(t0)
0
Durch die Wahl eines Koordinatensystems konnen wir die Festlegung des Ortsvektors auf
die Angabe von drei Zahlen (und die entsprechende Langeneinheit) reduzieren. Normalerweise
werden wir ein rechtshandiges Cartesisches Koordinatensystem wahlen.
zk
xi
x
i
φ
j
rxy
y
Die Vektoren ^i, ^j , k^ sind Vektoren der Lange
1 (in der gewahlten Langeneinheit, z. B. m) in
Richtung der drei Achsen x; y; z . Die Vektorsumme der drei Vektoren x^i, y^j , z k^ ergibt ~r.
x; y; z sind Zahlen.
>
>
>
k θ
>
>
r
>
z
yj
2.14
0 1
xC
B
^
^
^
~r = xi + yj + zk @ y A [ abgekurzte Schreibweise ]
z
x; y; z sind die Komponenten von ~r. Die Lange des Vektors ~r: j~rj r ergibt sich zu
q
j~rj = r = x2 + y2 + z2
Statt der Komponenten x; y; z konnen wir auch die Richtung des Vektors ~r im Raum durch
Angabe der beiden Winkel und festlegen und r als dritte Zahl wahlen. Dies nennt man
Darstellung in raumlichen Polarkoordinaten. Mit
q
rxy = x2 + y2
ergibt sich
sin = ry
xy
cos = rx
xy
sin = rrxy
cos = zr
0 1 0
1
x
r
sin cos ~r = B
@ y CA = B@ r sin sin CA
z
r cos Bezeichen wir die Ortsveranderung oder Verschiebung des Teilchens von einem Punkt der
Bahn zu einem anderen mit ~r:
~r2 = ~r1 + ~r ) ~r = ~r2 ; ~r1
∆r
r1=
r(t1)
r2=
In Koordinaten:
0 1 0
1
x
x
;
x
2
1
~r = B
@ y CA = B@ y2 ; y1 CA
z
z2 ; z1
r(t2)
Analog zum Fall der geradlinigen Bewegung denieren wir als mittlere Geschwindigkeit
0 x 1
0 1
t C
B
vx C
B
C
~
r
~
r
;
~
r
2
1
B
y
B
C
~v = t = t ; t = B t C = @ vy A
2 1 @
A
vz
z
t
Der Geschwindigkeitsvektor hat die gleiche Richtung wie die Verschiebung ~r. Fur die
momentane Geschwindigkeit erhalten wir
0 x 1 0 dx 1
0 1
t
dt
B
C
B
C
BB y CC BB dy CC B vx C
d~
r
~
r
= = lim t C = B dt C = @ vy A
~v = lim
t!0 t dt t!0 B
@ z A @ dz A
vz
t
dt
2.15
Dies schreibt sich dann wieder mit t2 = t und t1 = t0 als
~v(t ) = lim ~r(t) ; ~r(t0) = d~r j
0
t!t0
dt t0
t ; t0
Der Geschwindigkeitsvektor ist gleich der zeitlichen Ableitung des Ortsvektors. Unsere Beziehungen fur die geradlinige Bewegung hatten wir fur jede einzelne Komponente ubernehmen
konnen.
Als Schnelligkeit bezeichnen wir den Betrag des Geschwindigkeitsvektors:
s 2 2 2 q
dy
dz
2 2 2
v = dx
dt + dt + dt = vx + vy + vz
Durch Umkehren der Dierentialbeziehung kommen wir wieder durch Integieren von der
Geschwindigkeit zum Ort:
~r(t) = ~r(t0) +
~r(t) = ^i x(t0) +
Zt
t0
Zt
vx(t )dt + ^j y(t0) +
0
0
t0
Zt
t0
~v(t0)dt0
vy (t )dt + k^ z(t0) +
0
0
Zt
t0
vz (t )dt
0
0
Als erstes Beispiel kann uns eine Spielzeugeisenbahn dienen, die mit konstanter Schnelligkeit
ein Schienenoval befahrt (siehe Abbildung 2.14).
Der Schritt vom Geschwindigkeitsvektor zum Beschleunigungsvektor lasst sich in gleicher
Weise vollziehen, wie wir oben beim U bergang vom Ortsvektor zum Geschwindigkeitsvektor
vorgegangen sind. Wir denieren die A nderung der Geschwindigkeit des Teilchens von einem
Punkt der Bahn zu einem anderen als ~v :
~v 7
~v2 =
~v1 = ~v(t1) ~v(t2)
~v2 = ~v1 + ~v ) ~v = ~v2 ; ~v1
In Koordinaten:
0
vx
~v = B
@ vy
1 0
1
v
;
v
2
x
1
x
CA = B@ v2y ; v1y CA
vz
v2z ; v1z
Analog zum Fall der geradlinigen Bewegung denieren wir als mittlere Beschleunigung
0 vx 1
0 1
BB t CC
ax C
~
v
~
v
;
~
v
vy C = B
~a = t = t2 ; t 1 = B
@ ay A
2 1 B
@ vt CA
az
z
t
Der Beschleunigungsvektor hat die gleiche Richtung wie ~v. Fur die momentane Beschleunigung erhalten wir
2.16
0
BB
~
v
d~
v
B
~a = lim
= dt = lim
t!0 t
t!0 B
@
vx 1 0 dvx
t C B
dt
vy C
CC = BBB dvy
t A @ dt
vz
dvz
t
dt
Dies schreibt sich dann wieder mit t2 = t und t1 = t0 als
~v(t) ; ~v(t0) = d~v j
~a(t0) = tlim
!t
t;t
dt t0
1
CC 0 ax 1
CC B@ ay CA
A az
0
0
Der Beschleunigungsvektor ist gleich der zeitlichen Ableitung des Geschwindigkeitsvektors.
Unsere Beziehungen fur die geradlinige Bewegung hatten wir fur jede einzelne Komponente
ubernehmen konnen. Durch Umkehren der Dierentialbeziehung kommen wir wieder durch
Integieren von der Beschleunigung zur Geschwindigkeit:
~v(t) = ~v(t0) +
~v(t) = ^i vx(t0) +
Zt
t0
Zt
ax(t )dt + ^j vy (t0) +
0
0
t0
~a(t0)dt0
Zt
t0
ay (t )dt + k^ vz (t0) +
0
0
Zt
t0
az (t )dt
0
0
Auch fur das Berechnen der Beschleunigung konnen wir wieder die Spielzeugeisenbahn von
Abbildung 2.14 als Beispiel benutzen.
2.4.2 Beispiele: Schuss, Sprung und Wurf
In diesem Abschnitt betrachten wir die Bewegung eines Objekts wahrend eines freien Falls. In
vertikaler Richtung wird das Objekt durch die Anziehungskraft der Erde konstant nach unten
beschleunigt, in horizontaler Richtung ist die Beschleunigung null wahrend des Flugs oder des
Falls, weil wir vom Luftwiderstand absehen wollen.
y
y0
ay = ;g ax = 0
v0
Am Anfang der Bewegung hat das Objekt die Geschwindigkeit
~v0 mit den Komponenten
θ0
vx = v0 cos 0 und vy = v0 sin 0
x
Die Starthohe zur Zeit t = 0 sei y0 . Der Einfachheit halber wahlen wir den Ursprung der
x;Achse am Startort: x0 = 0. Durch Anwendung der Formeln fur die geradlinige Bewegung
und den Spezialfall konstanter Beschleunigung erhalten wir:
vy = v0 sin 0 ; gt
vx = v0 cos 0
y = yo + v0 sin 0t ; 2g t2
x = v0 cos 0t
Die Gleichung der Bahnkurve, die bekannte Wurfparabel, die die Flughohe y in Funktion der
Flugdistanz x angibt erhalt man aus den obigen Beziehungen durch Eliminieren der Zeit:
2.17
y
1
12
2
v
r
20cm
x
10
a
y
4
x
8
Ort
r
40
7
6
v=20cm/sec
9
12
Ort
x
[cm]
3
6
t[s]
y
-40
Geschwindigkeit
20
v
[cm/s]
vx
t[s]
vy
-20
Beschleunigung
20
ax
a
[cm/s2]
t[s]
ay
-20
1
2
4
8
6
10
12
Abbildung 2.14: Eine Spielzeugeisenbahn befahrt das oben gezeigte Schienenoval mit einer konstanten Schnelligkeit von 20 cm/s. Bei einer totalen Schienenlange von 246 cm betragt die
Umlaufszeit 12.3 s. Der Ursprung des zeidimensionalen cartesischen Koordinatensytems ist in
der Mitte gewahlt. Das oberste Diagramm zeigt die beiden Komponenten des Ortsvektors in
Funktion der Zeit, das mittlere die beiden Komponenten der Geschwindigkeit,und schliesslich
das unterste die beiden Komponenten der Beschleunigung.
2.18
g x2
y = y0 + tan 0x ; 2v2 cos
2
0
0
Die maximale Hohe erreicht das Objekt, wenn vy = 0 gilt, also zur Zeit t = v0 sin 0 =g :
2 2 0
ymax ; y0 = v0 sin
2g
Da Steigzeit und Fallzeit gleich sind, erreicht das Objekt seine Ausgangshohe wieder zur Zeit
t = 2v0 sin 0 =g und erreicht dort eine Weite:
2
2
xmax = 2v0 sin g0 cos 0 = v0 sing 20
Aus der obigen Formel schliesst man, dass die Weite am grossten wird, wenn der Abugwinkel
0 = 45 betragt, und dass man die gleiche Weite erreicht, wenn 0 = =2 bzw. 0 = 90 ; =2
gewahlt wird.
Abbildung 2.15 zeigt uns den Geschwindigkeits- und den Beschleunigungsvektor an verschiedenen Stellen der Bahnkurve. Wahrend ~a immer die gleiche Richtung und Grosse hat, andert
sich die Richtung und Grosse von ~v kontinuierlich. Die Komponente vx ist konstant, die Komponente vy andert wahrend des Fluges ihr Vorzeichen.
θ = 180°
v
θ
180° > θ > 90°
θ = 90°
v
a
θ
90° > θ > 0°
θ = 0°
v
a θ
θ
a
a
v
a
v
Abbildung 2.15: Richtung und Grosse des Geschwindigkeits- und des Beschleunigungsvektors
an verschiedenen Punkten der Flugbahn.
Beispiel 1, das Gurteltier: Das photographierte Tier von Abbildung 2.7 erreicht nach
0.2 s eine Hohe von 0.544 m. Wie lange ist es in der Luft und welche maximale Hohe erreicht
es ? Wir nehmen an, das Tier springt senkrecht nach oben (0 = 90). Dann konnen wir aus
y = v0t ; 2g t2 mit den gegebenen Zahlen v0 = 3:70 m/s ermitteln (g = 9:81 m/s2). Bei einer Zeit
von t = v0=g = 0:377 s erreicht das Tier seine maximale Hohe von v02=(2g ) = 0:698 m. Diese
Befunde sind in der graphischen Darstellung von Abbildung 2.6 enthalten.
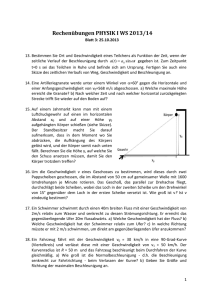
Beispiel 2, Tennis: Abbildung 2.16 zeigt uns die Resultate einer wissenschaftlichen Untersuchung zum Thema \The aerodynamics of tennis balls { the topspin lob" von A. Stepanek. Sie
zeigt uns Flugbahnen fur stark \geliftete" Balle (\Lobs"), die den am Netz stehenden Angrispieler in unerreichbarer Hohe uberiegen und ihn zum Zurucklaufen zwingen sollen. Festgehalten
2.19
sind bei diesen Bahnen die Ballhohe uber dem Netz und der Auftrespunkt kurz vor Platzende. Variiert wird der Abschlagsort des Verteidigungsspielers, der dann den entsprechenden
Anstiegswinkel bedingt und auch die Abschlagsgeschwindigkeit festlegt, die der Spieler wahlen
muss.
y
3.4
Abbildung 2.16: Realistische Flugbahnen von Tennisballen mit Berucksichtigung
des Luftwiderstands und des
Magnus-Effekts bei mit Spin
(Rotation) geschlagenen Ballen (aus The aerodynamics of
tennis balls { the topspin lob,
A. Stepanek (1987)).
2.6
y
1.8
1.0
25°
C
h
y0
A a A'b B
x
l
27°42' 32°3' 40°6'
Dx
NETZ
0.2
0
4
8
12
16
20
24
x
Naturlich wird bei dieser Untersuchung im Gegensatz zu unseren Annahmen der Luftwiderstand nicht vernachlassigt. Welchen Eekt diese zusatzliche Kraft auf den Ball hat, kann man
z. B. an der Bahn demonstrieren, die an der Grundlinie beginnt und mit 25 ansteigt. Fur
diese Bahn braucht es eine Anfangsgeschwindigkeit v0 = 19:35 m/s, bei einem zuruckgelegtem
Weg von 23:77 m bleibt der Ball 1:672 s in der Luft und uberquert den Angrisspieler in 3:7 m
Hohe nach 0:873 s. Ohne Luftwiderstand berechnen wir mit y0 = 0:8 m, v0 = 19:35 m/s und
0 = 25, dass der Boden y = 0 nach 1:76 s erreicht wird, bei x = 30:86 m statt bei x = 23:77
m. Die Flugzeit ist zwar nicht allzu verschieden, die Flugweite aber betrachtlich grosser, und
der Ball wurde weit im Aus, vermutlich sogar am Zaun landen. Zentrales Thema der zitierten
Untersuchung ist allerdings nicht der Einuss des Luftwiderstands, sondern der Einuss der
Rotation des Balls um die eigene Achse, die der gute Tennisspieler diesem bewusst durch geschickte Schlagerhaltung wahrend des Schlags erteilt, der \Topspin" entspricht in diesem Fall
einer Rotation im Uhrzeigersinn, ein unterschnittener Ball (\Slice") rotiert in der entgegengesetzten Richtung. In der Aerodynamik (Abschnitt 2.11.2) werden wir mit dem Magnus-Eekt
eine weitere Kraft kennen lernen, die in Luftstromungen auf sich drehende Objekte wirkt. Diese
Kraft hat im Fall des Topspins die gleiche Richtung wie die Erdanziehung, druckt den Ball also
nach unten und verkurzt die Flugbahn. Ein Slice hat eine langere Flugbahn. Will der Spieler mit
Topspin einen Lob schlagen, so muss er diesen mit grosserer Anfangsgeschwindigkeit schlagen,
um die gleiche Flugbahn zu erreichen. Fur die vorher diskutierte Flugbahn braucht es bei 3500
Umdrehungen des Balls pro Minute eine Anfangsgeschwindigkeit von v0 = 23:75 m/s. Einen
Lob mit Topspin zu schlagen bringt fur den verteidigenden Spieler den Vorteil mit sich, dass der
Ball die Flugbahn schneller durchlauft, er uberquert den Angreifer schon nach 0:729 s und trit
nach 1:440 s auf dem Boden auf.
2.20
Aus gleicher Hohe horizontal geschlagen haben ein schneller \Drive", dessen Aufsetzpunkt
in der Nahe der gegnerischen Grundlinie ist, und ein weicher, gefuhlvoller \Stop", der knapp
hinter dem Netz auf den Boden fallt, stark verschiedene Anfangsgeschwindigkeiten. Welcher
Ball ist langer in der Luft, wenn wir den Einuss der Luft vernachlassigen ?
2.4.3 Bewegung entlang einer Kreisbahn
Ein haug in der Natur auftretender Spezialfall einer ebenen, zweidimensionalen Bewegung ist
der, wo sich das Objekt auf einer Kreibahn bewegt, denken wir z. B. an die Planetenbahnen, die
meistens in guter Naherungen Kreise sind, an viele Bahnen der Elektronen im Atom, das Verhalten von Fahrzeugen in Kurven, die von Skifahrern durchfahrenen Mulden oder uberfahrenen
Kuppen, und ahnliches mehr.
2.4.3.1 Konstante Schnelligkeit Im Beispiel der Spielzeugeisenbahn (Abbildung 2.14) aus
dem Abschnitt 2.4.1 haben wir den Fall der mit konstanter Schnelligkeit zu durchfahrenden,
kreisformig angelegten Kurve bereits angetroen. Konstante Schnelligkeit bedeutet j~vj = v =
const., d. h. der Betrag der Geschwindigkeit andert sich nicht, nur deren Richtung. Die Richtung
der Geschwindigkeit ist identisch mit der Richtung der Tangente an die Bahn, an den Kreis mit
Radius r. Die Beschleunigung ist immer auf das Kreiszentrum hin gerichtet, ihr Betrag ist
konstant. Man gibt dieser Beschleunigung den Namen Zentripetalbeschleunigung ~aN und ndet
2
j~aN j = vr
Der Index N deutet an, dass die Richtung der Zentripetalbeschleunigung senkrecht (normal) zur
Bahn ist, der Name wurde von Isaac Newton gepragt: \centripetal" = \center seeking". Den
Beweis fur die obige Beziehung fuhren wir in Abbildung 2.17.
Wir vergleichen die Geschwindigkeitskomponenten
in den Punkten p und q fur ~v = const.:
y
vpx = v cos vqx = v cos vx = 0
v
=
v
sin
v
=
;
v
sin
v
= ;2v sin py
qy
y
ϕP
vpx
vqy
Bogenlange : pq = 2r ) t = (2r)=v
r
r
p! P q
ϕ ϕ
vy
v2 sin v
a
x = tx = 0 ay = t = ; r
x
0
sin ! 1
! 0; t ! 0
2
Abbildung 2.17: Bewegung entlang einer ax ! ax ; ay ! ay
ay = ; vr
vp
p
vpy
q vqx
ϕ
vq
Kreisbahn mit konstanter Schnelligkeit.
Das negative Vorzeichen bedeutet, dass die Beschleunigung nach innen zeigt.
Die x-Komponente der Beschleunigung (Abbildung 2.17) verschwindet. Die Beweisfuhrung
ist unabhangig davon, wo wir den Referenzpunkt A entlang des Kreises wahlen. An einem
beliebig gewahlten Punkt ist ay identisch mit der Normalkomponente aN und ax identisch mit
2.21
der Komponente parallel zur Bahn, die wir jetzt Tangentialkomponente aT nennen wollen. Fur
die Kreisbahn mit konstanter Schnelligkeit gilt
aT = 0
2.4.3.2 Variable Schnelligkeit Eine beliebig gekrummte raumliche Bahn kann in einem
gegebenen Punkt naherungsweise durch einen Kreisabschnitt ersetzt werden (Abbildung 2.18).
Wenn dieser an die Bahn angepasste Krummungskreis den Radius hat, gilt
2
aN = v
kann zeitabhangig sein. Bezeichnen wir mit vT und dvT die Tangentialkomponente der Geschwindigkeit und ihre A nderung, mit vN und dvN die entsprechenden Grossen fur die Normalkomponente, so lasst sich aus Abbildung 2.19 ablesen, dass fur d ! 0 gilt
dvT = dj~vj = A nderung der Lange von ~v
dvN = j~vjd = vd
und damit
aT = dvdtT = dv
aN = dvdtN = v d
dt
dt
v(t)
r
dφ
aN
ρ=15m
x
ρ=25m
aN
dvT
dv
dvN
φ
v(t+dt)
Abbildung 2.19: Zur Denition von
Abbildung 2.18: Zur Denition des Krummungskreises Normal- und Tangentialbeschleunifur eine beliebige gekrummte Bahn.
gung fur eine beliebige gekrummte
Bahn.
Eine etwas formellere Analyse der Bewegung entlang einer Kreisbahn, die auch die Moglichkeit einschliesst, dass sich der Betrag der Geschwindigkeit andert, benutzt ebene Polarkoordinaten und fuhrt die Winkelgeschwindigkeit ! ein. Mit den geometrischen Bezeichnungen von
Abbildung 2.19 gilt
!
x = r cos y
r sin !
0 dx 1
! 0 ;r sin d 1
dt A = vx = B
dt C
@ dy
@
d A
vy
dt
r cos dt
q 2 2 s 2 d 2 2
v = vx + vy = r dt (sin + cos2 ) = r d
dt r!
! d
dt
Fur den Fall der konstanten Schnelligkeit ist ! identisch mit der in Abschnitt 2.2.1 eingefuhrten Kreisfrequenz ! = 2=T , wobei T die Umlaufszeit fur den vollen Kreis ist.
2.22
Im allgemeinen Fall gilt also
d 2 v2
aN = r dt = r = r!2
2
aT = r ddt2 = r d!
dt
Zusammenfassung: Allgemeine Denition von Geschwindigkeit und
Beschleunigung
Ortsvektor: Der Ortsvektor ~r gibt an, wo sich ein Teilchen bezuglich des Ursprungs O ben-
det. Wenn die drei Koordinatenrichungen eines cartesischen Koordinatensystems (x; y; z )
durch die drei Einheitsvektoren ^i; ^j ; ^k xiert werden, ist:
0 1
x
~r = x^i + y^j + zk^ B
@ y CA
q
j~rj r = x2 + y2 + z2
z
x = r cos sin y = r sin sin z = r cos 0 1
x
Ortsveranderung im Zeitintervall t :
~r = ~r(t + t) ; ~r(t) B
@ y CA
z
In spharischen Polarkoordinaten :
Geschwindigkeit:
Mittlere Geschwindigkeit :
(Momentane) Geschwindigkeit:
0
~r lim B
BB
~v(t) = lim
t!0 t t!0 @
Schnelligkeit :
x
t
y
t
z
t
0
~r B
B
~v = @
t B
0
1
CC d~r BB
CA dt B@
dx
dt
dy
dt
dz
dt
x
t
y
t
z
t
1 0
1
CC B vx(t) C
CA @ vy (t) A
v (t)
q
j~vj v = vx2 + vy2 + vz2
2.23
1
CC
CA
z
Zusammenfassung: Allgemeine Denition von Geschwindigkeit und
Beschleunigung
Beschleunigung:
Mittlere Beschleunigung :
0
B
~a = ~vt B
B@
vx
t
vy
t
vz
t
1
CC
CA
(Momentane) Beschleunigung:
0
~v lim B
BB
~a(t) = lim
t!0 t t!0 @
vx
t
vy
t
vz
t
0
1
CC d~v BB
CA dt B@
dvx
dt
dvy
dt
dvz
dt
1 0
1
CC B ax(t) C
CA @ ay (t) A
az (t)
Integralbeziehungen:
0
1
R
x
(t0 ) + tt0 vx (t0 )dt0
B
C
R
~r(t) = ~r(t0) + ~v(t0)dt0 B
y(t0) + tt0 vy (t0)dt0 C
@
A
t0
R
z(t0) + tt0 vz (t0)dt0
0
1
Rt
v
x (t0 ) + t0 ax(t0 )dt0
Zt
B
C
~v(t) = ~v(t0) + ~a(t0)dt0 B
vy (t0) + Rtt0 ay (t0)dt0 C
@
A
R
t0
v (t ) + t a (t0)dt0
Zt
z 0
t0 z
Zusammenfassung: Bewegung entlang einer Kreisbahn mit Radius r
Normalbeschleunigung:
Tangentialbeschleunigung:
d 2 v2
aN = r dt = r
v
Winkelgeschwindigkeit : ! = d
=
dt r
2
aT = ddtj~vj = r ddt2 (= 0 fur v = const:)
2.24